Apuntes de Mecánica (Bolillas 5 a 10) - UTN
Anuncio
 - UTN")
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
BOLILLA Nº 5
DINÁMICA DEL PUNTO
•
•
•
•
•
•
PRINCIPIOS; ECUACIÓN FUNDAMENTAL DE LA DINÁMICA.
EQUILIBRIO DINÁMICO; PRINCIPIO DE D' ALEMBERT.
TERNAS CARACTERÍSTICAS; SISTEMAS GALILEANOS.
PROBLEMAS DE LA DINÁMICA.
CONSECUENCIA DE LA IGUALDAD FUNDAMENTAL DE LA
DINÁMICA; IMPULSO T CANTIDAD DE MOVIMIENTO;
MOMENTO CINÉTICO; TRABAJO Y ENERGÍA CINÉTICA.
ECUACIONES DIFERENCIALES DEL MOVIMIENTO; CASOS
PARTICULARES.
TEMAS AGREGADOS:
•
DINÁMICA DEL PUNTO VINCULADO.
Digitalización y compaginación: José.L.Sidoti
Página 1 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
DINÁMICA DEL PUNTO
PRINCIPIOS:
Todo el estudio de la Mecánica se basa en tres leyes o principios fundamentales
conocidos universalmente como leyes de Newton, aunque solo una se debe a el, ya
que la primera y la tercera hablan sido enunciadas por Galileo:
Las tres leyes son:
1. Principio de inercia
2. Principio de masa
3. Principio de acción y reacción
Cuyo enunciado, comentario y discusión no haremos aquí por haberse hecho
ampliamente en los cursos de Física.
ECUACIÓN FUNDAMENTAL DE LA DINÁMICA
La ecuación fundamental:
La igualdad fundamental F = m ⋅ a que es la expresión matemática del segundo
principio, traduce el hecho experimental siguiente: si sobre un mismo punto actúan
sucesivamente fuerzas F 1 , F 2 etc., las aceleraciones que el punto material adquiere
a 1 , a 2 etc., van dirigidas según las direcciones y sentido de las fuerzas que las
provocan y sus magnitudes son proporcionales
F1 F 2
=
= ... = m
a1
a2
“m” es una magnitud ESCALAR y además esencialmente positiva (magnitud
modular).
El modular “m” es la MASA MECANICA del punto material, es un invariante de
cada punto o sistema y se admite es proporcional a la cantidad de materia que
contiene (para los límites de validez de los principios; de la Mecánica Clásica).
TERNAS CARACTERÍSTICAS:
Digitalización y compaginación: José.L.Sidoti
Página 2 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Sistemas galileanos: Los principios fundamentales de la Mecánica son validos para
sistemas de referencia absolutos. Con todo rigor, dentro del campo de la Mecánica
teórica, no es necesario conocer efectivamente un sistema de ejes que cumpla la
condición antes expresada, basta admitir que existe uno y admitido uno cualquiera,
todo sistema que se mueva respecto a ese con movimiento translatorio rectilíneo y
uniforme; también cumple con la condición apuntada; a estos se los denomina
sistemas de ejes Galileanos o inerciales.
El sistema de ejes fijos que más se aproxima a aquellas condiciones ideales, dado la
exactitud alcanzada en nuestras medidas, porque mantiene sus direcciones
absolutamente fijas, es el que tiene su centro en el centro de masa del sistema solar y
ejes orientados hacia las estrellas fijas, este sistema absoluto se denomina Ejes de
Copérnico, y por consecuencia las masas y las fuerzas medidas respecto a el las
denominamos masas y fuerzas absolutas, que son únicas para todos los sistemas de
ejes galileanos.
Es evidente que si a es la aceleración de un punto material referido a la terna
absoluta 0 i; j; k y a1 , la aceleración del mismo punto material referido a una terna
(
(
)
)
galileana 01 i1 ; j 1 ; k 1 se tiene:
a = a1
Por lo tanto formula fundamental F = m ⋅ a mantiene rigurosamente su validez
cuando el movimiento del punto se refiere a una terna galileana cualquiera.
En la solución de problemas técnicos el sistema de referencia que se adapta se
supone solidario a la Tierra, cometiéndose un error que es despreciable dado el grado
de aproximación requerido para esa clase de cálculos.
La tierra es prácticamente es un sistema inercial:
a ab = a r + a ar + a c
Si el sistema fuese inercial se verificaría que:
a ab = a r
La aceleración de arrastre es la de la Tierra en su movimiento alrededor del Sol
(movimiento anual), que en el mejor de los casos vale: a ≅ 1cm seg 2 y el movimiento
de rotación diario, cuyo valor máximo (sobre el Ecuador) vale: a ≅ 2.5 cm seg 2 luego
a ar ≅ 1 + 2.5 = 3.5 cm seg 2 .
Para una velocidad relativa de 2.160 Km h (600 m seg ) la aceleración de Coriolis vale:
a c = 2ω ∧ V r ≅ 2 × 0.5 = 1cm seg 2 (como máximo).
Digitalización y compaginación: José.L.Sidoti
Página 3 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
De manera que a ab − a r = 3,5 + 1 = 4,5 cm seg 2 que comparándola con la aceleración de
la gravedad (aprox. 1.000 cm seg 2 ) resulta despreciable en la mayoría de los casos.
PROBLEMAS DE LA DINÁMICA
Los problemas que nos plantea la dinámica son de dos tipos:
1. Dada la masa y la ley del movimiento de un punto material, encontrar la
resultante de las fuerzas que sobre el actúan.
2. Conocida la masa y la resultante de las fuerzas que actúan sobre el punto
material, determinar la ley del movimiento.
El primer problema, llamado PROBLEMA DIRECTO de la dinámica, se resuelve
por derivación no revistiendo mayores dificultades. En efecto, la formula
d 2 (Pi − 0 )
fundamental de la dinámica F = m ⋅ a = m ⋅
nos da la posibilidad de
dt 2
resolverlo, ya que se conoce (Pi − 0 ) = f (t ) (ley del movimiento).
El segundo problema, llamado PROBLEMA INVERSO, lo resuelve el cálculo
integral:
d 2 (Pi − 0) 1
= ⋅F
dt 2
m
Donde F en el caso general es función del tiempo, la posición y la velocidad:
F = f (t ; p; v )
De la doble integración surgen dos constantes que se determinan conociendo la
posición y la velocidad del punto en un instante dado, que por lo general se toma
como origen de los tiempos.
t =0
⎧ x0
⎪
P = P0 ⎨ y0
⎪z
⎩ 0
⎧V0 x
⎪
V = V0 ⎨V0 y
⎪V
⎩ 0z
Las ecuaciones diferenciales del movimiento que se tratan más adelante, nos
facilitarán los medios para resolver este segundo problema, desde ya más complejo
que el anterior.
Digitalización y compaginación: José.L.Sidoti
Página 4 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
CONSECUENCIAS
DINÁMICA
DE
LA
IGUALDAD
FUNDAMENTAL
DE
LA
dV
la ecuación fundamental de la dinámica puede escribirse
dt
dV d
dQ
F = m⋅a = m⋅
= ⋅ m ⋅V =
donde el producto m ⋅V = Q que es un vector
dt dt
dt
de igual dirección y sentido que V se denomina CANTIDAD DE MOVIMIENTO.
La expresión anterior establece que la fuerza es la derivada con respecto al tiempo de
la cantidad de movimiento, que en proyecciones puede escribirse:
Siendo a =
(
)
d
d ⎛ dx ⎞
⋅ (m ⋅Vx ) = ⋅ ⎜ m ⋅ ⎟
dt
dt ⎝ dt ⎠
d
d ⎛ dy ⎞
Fy = ⋅ (m ⋅V y ) = ⋅ ⎜ m ⋅ ⎟
dt
dt ⎝ dt ⎠
d
d ⎛ dz ⎞
Fz = ⋅ (m ⋅Vz ) = ⋅ ⎜ m ⋅ ⎟
dt ⎝ dt ⎠
dt
Fx =
dQ
puede obtenerse F ⋅ dt = d Q que establece que la
dt
IMPULSIÓN ELEMENTAL de la fuerza F en el intervalo dt es igual a la
variación infinitesimal del vector cantidad de movimiento Q .
De la expresión F =
Si se toma el momento del vector Q respecto a un punto de referencia 0 , se obtiene
el vector MOMENTO DE LA CANTIDAD DE MOVIMIENTO, MOMENTO
CINÉTICO o “DRALL” K .
K = m ⋅ V ∧ (0 − P ) = Q ∧ (0 − P )
Digitalización y compaginación: José.L.Sidoti
Página 5 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Si se deriva respecto al tiempo:
dK
d
d
d (P − 0 )
dV
= m ⋅ ⋅ V ∧ (0 − P ) = m ⋅ ⋅ (P − 0) ∧ V = m ⋅
∧ V + m ⋅ (P − 0 ) ∧
=
dt
dt
dt
dt
dt
[
]
[
]
= m ⋅V ∧ V + m(P − 0) ∧ a = m ⋅ a ∧ (0 − P ) = F ∧ (0 − P ) = M ∴
dK
=M
dt
Expresión que la derivada respecto al tiempo del momento cinético do un punto
material, respecto a un punto cualquiera del espacio, es igual al momento de las
fuerzas exteriores aplicadas al punto material con respecto al mismo punto de
referencia.
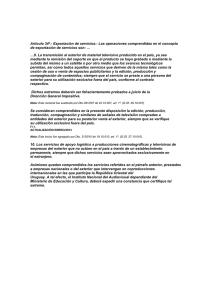
Ejemplo:
Sea una bolilla M de masa m forzada a describir una trayectoria circular sobre un
plano horizontal mediante una cuerda ideal que atada a la bolilla en un extremo
atraviesa al plano por un agujero practicado en 0.
Se pretende conocer, aplicando las fórmulas recientemente obtenidas, coro va ría la
velocidad de la bolilla y la tensión de la cuerda, cuando el radio de la trayectoria se
reduce a la mitad.
La condición inicial corresponde a la bolilla recorriendo una trayectoria circular de
radio r y velocidad V ; en la segunda condición el radio de la trayectoria se reduce a
r
y la velocidad pasa a ser V 1 .
2
Los momentos de la cantidad de movimiento en ambos casos estarán dados por las
siguientes expresiones:
K = mV ∧ r
K 1 = mV 1 ∧
r
2
Como la única fuerza exterior que actúa es S que pasa permanentemente por 0 , el
momento de la misma con respecto a dicho punto es siempre igual a cero, luego se
verifica que:
Digitalización y compaginación: José.L.Sidoti
Página 6 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
dK
= 0 ∴ K = cte
dt
r
m ⋅V ∧ r = m ⋅ V 1 ∧ ∴V 1 = 2 ⋅V
2
La cantidad de movimiento para las dos condiciones propuestas estarán dadas por:
Q = m ⋅ V ; Q1 = m ⋅ V 1
Y la fuerza actuante para ambos casos será:
dQ
=S
dt
⎫
dV
V2 o
S = m⋅
= m ⋅ a = −m ⋅
⋅r
⎪
dt
r
⎪
2
∴S1 = 8⋅ S
2
o⎬
V1 o
8 ⋅V
dV 1
S1 = m ⋅
= m ⋅ a1 = − m ⋅
⋅ r = −m ⋅
⋅r ⎪
r
r
dt
⎪⎭
2
F=
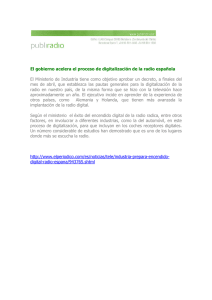
TEOREMA DE LAS FUERZAS VIVAS
Supongamos un punto material de masa m que se mueve sobre la trayectoria
AB por acción de la fuerza F y que en un instante t su posición sea M y en otro
instante t + dt sea M ' ; el elemento de trayectoria MM ' = d s valdrá: d s = V ⋅ dt
Digitalización y compaginación: José.L.Sidoti
Página 7 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
El trabajo elemental de la fuerza F en el camino d s será: dΤ = F × d s = F × V dt y
d
siendo F = ⋅ m ⋅V se tendrá:
dt
d
⎛1
⎞
dΤ = ⋅ m ⋅ V × V dt = d m.V × V = m ⋅ dV × V = m ⋅ V × dV = d ⎜ ⋅ m ⋅ V 2 ⎟
dt
⎝2
⎠
⎛1
⎞
dΤ = d ⎜ ⋅ m ⋅V 2 ⎟
⎝2
⎠
( )
( )
( )
m ⋅V 2 , Leibniz le denominó FUERZA VIVA.
1
⋅ m ⋅V 2 , es la SEMI FUERZA VIVA o ENERGÍA CINÉTICA.
2
Integrando a lo largo de la trayectoria AB nos da:
B
∫ dΤ = Τ
B
AB
A
(
)
= ∫ d 12 ⋅ m ⋅ V 2 = 12 ⋅ m ⋅VB2 − 12 ⋅ m ⋅ V A2
A
Que nos dice que “la variación de la energía cinética es igual a la suma de los
trabajos efectuados durante el intervalo por las fuerzas que actúan sobre el punto
material”.
Ejemplo:
Supongamos el caso en que la fuerza deriva de un potencial, por ejemplo, la fuerza
de gravedad.
F = −K ⋅
M ⋅m o
M ⋅m
⋅ r ; dU = − F × d r = K ⋅ 2 ⋅ dr
2
r
r
B
1
M ⋅m
⎡1⎤
U = − K ⋅ M ⋅ m ⋅ ; ΤAB = ∫ F × d r = ∫ − K 2 ⋅ dr =K ⋅ M ⋅ m ⎢ ⎥ = U A − U B
r
r
⎣ r ⎦ rA
A
A
B
B
r
Pero acuerdo a lo visto: ΤAB = 12 ⋅ m ⋅ VB2 − 12 ⋅ m ⋅ V A2 = U A − U B
1
2
⋅ m ⋅ VB2 + U B = 12 ⋅ m ⋅ V A2 − U A
Luego la suma de las energías cinética y potencial es constante durante el
movimiento, esto ocurre en todos los SISTEMAS CONSERVATIVOS.
Ejemplo:
Supongamos que quisiéramos determinar la velocidad con que llega a Tierra un
punto material abandonado en el vacío a una altura “h”.
Digitalización y compaginación: José.L.Sidoti
Página 8 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
ΤAB = U A − U B =
R (R + h
)≅
⎡R + h − R⎤
h
K ⋅M ⋅m K ⋅M ⋅m
−
= K ⋅M ⋅m⋅⎢
= K ⋅M ⋅m⋅ 2
⎥
R
R+h
R
⎣ R (R + h ) ⎦
Se ha considerado
R
2
“h” despreciable frente al radio de la Tierra.
K ⋅M
= g ∴ ΤAB = g ⋅ m ⋅ h = 12 ⋅ m ⋅ VB2 − 12 ⋅ m ⋅V A2
2
R
Si VA = 0
1
⋅ m ⋅ VB2 = g ⋅ m ⋅ h ⇒ VB = 2 gh
2
Valor que coincide con el obtenido cinemáticamente en la Bolilla III.
Ejercicios:
1. Demostrar que en un vehículo con frenos antibloqueantes en todas sus ruedas,
la distancia de frenado es independiente del peso del mismo y vale s:
V2
d=
2 gμ
2. En el texto “CÁLCULO DE ELEMENTOS DE MÁQUINAS” de Vallance y
Doughtie, capítulo IV “Tensiones de proyecto y coeficientes de seguridad” en
lo referente a “Coeficiente de choque” dice textualmente: “… los textos de
Mecánica enseñan que la tensión producida por una carga de impacto es s”:
δi =
⎛
P ⎛
h⎞
h⎞
⋅ ⎜⎜1 + 1 + 2 ⎟⎟ = δ ⋅ ⎜⎜1 + 1 + 2 ⎟⎟
A ⎝
y⎠
y⎠
⎝
Digitalización y compaginación: José.L.Sidoti
Página 9 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Donde:
P
A
:
:
y
:
h
:
:
δi
δ
Carga aplicada en Kg .
Área de la sección transversal en cm 2 .
Deformación producida por la carga P en condiciones estáticas en
cm .
Altura de caída libre para producir la velocidad de impacto en cm .
Tensión producida por el impacto en Kg cm 2 .
Tensión estática en Kg cm 2 .
Justificar la fórmula anterior.
Si un punto material está sometido a la resultante de las fuerzas activas aplicadas
( F ) y a vínculos cuya acción puede sustituirse por fuerzas reactivas ( W ), la
ecuación fundamental de la dinámica puede plantearse como sigue:
d 2 (P − 0 )
F +W = m⋅
dt 2
d 2 (P − 0 )
d 2 (P − 0 )
+
−
⋅
=0
al
primer
miembro:
F
W
m
dt 2
dt 2
La expresión aparece como la suma de fuerzas concurrentes que dan como resultado
cero, esta es la condición de equilibrio vista en estática, pero en este caso hay
d 2 (P − 0 )
movimiento y − m ⋅
es la REACCIÓN DE INERCIA también llamada,
dt 2
FUERZA AUXILIAR DE D'ALAMBERT.
El punto material está en equilibrio dinámico bajo la acción da las fuerzas activas,
reactivas de vínculo y la reacción de inercia; este es el PRINCIPIO DE
D'ALAMBERT que nos permite resolver un problema dinámico como si fuera
estático, basta para ella considerar al punto o al cuerpo en movimiento como cuerpo
libre, haciendo actuar sobre el todas las fuerzas mencionadas, fuerzas que deben estar
en equilibrio.
Si se pasa m ⋅
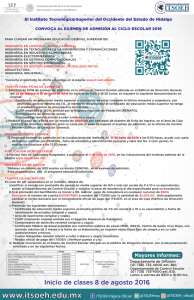
Ejemplo:
En el sistema de la figura se quiere conocer las tensiones T1 y T2 en las cuerdas que
vinculan las masas.
Todo el sistema se desplaza con una aceleración a =
F
∴ m = m1 + m2 + m3 .
m
Digitalización y compaginación: José.L.Sidoti
Página 10 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Si se toma al cuerpo m1 como cuerpo libre, este estará en equilibrio dinámico bajo la
acción de las fuerzas F , T 1 y la reacción de inercia.
F + T 1 − m1a = 0 ∴T 1 = − F + m1a =
= − F + m1
m + m3
m −m
F
=F⋅ 1
= −F ⋅ 2
m
m
m
Si tomamos el cuerpo m2
T 1 + T 2 − m2 a = 0
∴T 2 = −T 1 + m2 a = − F ⋅
= T 2 = −F ⋅
m2 + m3
F
+ m2 ⋅ =
m
m
m3
m
Para el cuerpo m3 se verifica:
T 2 − m3 a = 0
T 2 = m3 a = m3 ⋅
m
F
=F⋅ 3
m
m
ECUACIONES DIFERENCIALES DE LOS MOVIMIENTOS
Son las tres siguientes:
( )
d2s
d v d mV
dQ
=
=
= m⋅ 2
dt
dt
dt
dt
⎞
⎛1
dΤ = F × d s = d ⎜ ⋅ m ⋅V 2 ⎟
⎠
⎝2
F = m⋅a = m⋅
M0 =
dK0
= F ∧ (0 − P )
dt
Con ellas pueden resolverse los problemas que plantea la dinámica.
En dinámica hay tres variables, tiempo, velocidad y ubicación y una fuerza puede
ser función de ellas aisladamente o en conjunto.
()
F = f 1 (t ) ; F = f 2 v ; F = f 3 (s ) ; F = f 4 (t , v, s )
Lo más común es el caso en que la fuerza es función del tiempo; cuando la fuerza es
función de la velocidad se presentan dos casos reales, cuando la fuerza es función
Digitalización y compaginación: José.L.Sidoti
Página 11 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
lineal de la velocidad y cuando es función cuadrática; las soluciones de otros casos
son poco definidas.
Cuando la fuerza depende de la ubicación estamos en presencia de fuerzas
posicionales, como por ejemplo un cuerpo abandonado en el vacío sobre la Tierra, o
el caso de estudios de resortes, etc.
A continuación se plantea de una manera formal la solución del segundo problema de
la dinámica para cada uno de los casos mencionados.
Consideremos: F = f 1 (t )
1
dV
; m ⋅ d V = F (t ) ⋅ dt ; dV = ⋅ F (t ) ⋅ dt
dt
m
1
1
∫ dV = m ∫ F (t )⋅ dt ; V = m ∫ F (t ) ⋅ dt + C 1
d (P − 0 )
⎤
⎡1
; d (P − 0 ) = ⎢ ∫ F (t ) ⋅ dt ⎥ ⋅ dt + C 1 ⋅ dt
V=
dt
⎦
⎣m
(P − 0) = ∫ ⎡⎢ 1 ∫ F (t ) ⋅ dt ⎤⎥ ⋅ dt + ∫ C 1 ⋅ dt + C 2
⎣m
⎦
F (t ) = m ⋅
Que es la ley del movimiento.
()
Caso en que F = f 2 v
F (V ) = m ⋅
dV
dV
dV
; dt = m ⋅
∴t = m∫
= ϕ (V )
dt
F (v )
F (v )
t = ϕ (V ) , despejando V se tiene: V = Ψ (t )
d (P − 0 )
= Ψ (t ) ; d (P − 0) = Ψ (t ) ⋅ dt y (P − 0) = ∫ Ψ (t ) ⋅ dt + C
V=
dt
Caso en que F = f 3 (s )
⎛ m ⋅V 2 ⎞
⎟⎟ = m ⋅ V × d V
dΤ = F ( S ) × d s = d ⎜⎜
2
⎠
⎝
F (S ) × d s
; De donde se puede despejar: V = ϕ (S )
V × dV =
m
ds
ds
V=
= ϕ ( S ) ∴ dt =
dt
ϕ (S )
Expresión que nos permite determinar el tiempo para cada posición.
Digitalización y compaginación: José.L.Sidoti
Página 12 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Ejemplo:
MOVIMIENTO RECTILÍNEO DE UN CUERPO LIBRE
1) Fuerza función de la velocidad: F = f (v )
Consideremos un cuerpo abandonado a la acción de la gravedad de la Tierra que se
mueve en un medio resistente (como es el aire) y que esa resistencia sea función
lineal de la velocidad.
Las fuerzas actuantes son: su peso, P = m ⋅ g y la resistencia al aire R = k ⋅ V . Como
la fuerza conserva la dirección de la velocidad, se puede trabajar escalarmente.
F (v ) = mg − kv = m ⋅
dv
dt
m ⋅ dv
m ⋅ dv
∴t = ∫
dt =
mg − kv
mg − kv
m
t = − ⋅ ln (mg − kv ) + C1
k
Si suponemos que para: t = 0 ; V0 = 0
−m
m
0=
⋅ ln mg + C1 ∴ C1 = ⋅ ln mg
k
k
m
m
t = ⋅ ln mg − ⋅ ln(mg − kv )
k
k
k
⋅t
k
mg
mg
∴
⋅ t = ln
= em
m
mg − kv mg − kv
mg
mg
= mg − kv ; mg −
= kv
k
⋅t
em
k
⋅t
em
k
⎛
− ⋅t ⎞⎟
mg ⎜
∴V =
1− e m ⎟
k ⎜⎜
⎟
⎝
⎠
k
k
mg ⎛⎜ 1 ⎞⎟ − m ⋅t
mg
mg
dx
mg − m ⋅t
⋅t −
⋅t −
⋅e
+ C2
e
dt + C 2 =
V = ∴X =
k ⎜⎜ − k ⎟⎟
k
k
dt
k ∫
m⎠
⎝
k ⎞
⎛
mg ⎜ m − m ⋅t ⎟
X=
⋅ t + ⋅e
⎟ + C2
k ⎜⎜
k
⎟
⎠
⎝
Digitalización y compaginación: José.L.Sidoti
Página 13 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Suponiendo que para t = 0 ; X 0 = 0
0=
m2 g
mg m
⋅ + C2 ∴ C2 = −
k k
k2
⎡
⎛ k
⎞
⎛ k
⎞⎤
m 2 g ⎜ − m ⋅t ⎟ mg ⎢ m ⎜ − m ⋅t ⎟⎥
mg
⋅t +
− 1⎟ =
⋅ t + ⋅⎜e
− 1⎟
X=
⎜e
k
⎟ k ⎢ k ⎜
⎟⎥
k2 ⎜
⎝
⎝
⎠⎦⎥
⎠
⎣⎢
En todo este razonamiento k representó el coeficiente de resistencia aerodinámica,
que es función de la forma del cuerpo y del medio resistente.
2) Fuerza función de la posición F = f (s )
Consideremos el mismo cuerpo anterior pero a gran altura sobre la Tierra, fuera de la
atmósfera. La única fuerza que actúa es la fuerza de atracción de la Tierra:
mM
F (s ) = −k
X2
k : representa la constante de la gravitación universal.
dΤ = − k
−k
M
x2
− kM ∫
mM
x2
⋅ dx = m ⋅ V ⋅ dV
⋅ dx = V ⋅ dV
dx
= ∫ V ⋅ dV
x2
M 1 2
k
= V +C
x 2
t = 0 ; X 0 = ∞ ; V0 = 0 ∴ C = 0
V 2 = 2k
M
2kM
yV=
x
x
dx
2kM
1
=
∴
⋅ x ⋅ dx = dt
dt
x
2kM
1
1
2 32
1
2 ⋅ dx = t + C ∴ t + C =
x
⋅
⋅x
∫
2kM 3
2kM
V=
x3
2
t +C = ⋅
3 2kM
DINÁMICA DEL PUNTO VINCULADO
Si el punto material está vinculado, la ecuación fundamental de la dinámica se
transforma en:
F +W = m⋅a
Digitalización y compaginación: José.L.Sidoti
Página 14 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Donde W es la reacción del vínculo, si esta es perpendicular a la superficie o curva
que representa el vínculo, se denomina vinculo liso o vínculo sin frotamiento.
Si W no es perpendicular a la superficie o curva, presenta siempre una componente
tangencial en sentido contrario al movimiento ( fuerza o reacción de frotamiento).
Movimiento de un punto sobre una superficie
Sea una superficie que puede desplazarse o deformarse en función del tiempo:
f ( x, y , z , t ) = 0
Si no hay rozamiento, la reacción que la superficie puede ejercer sobre el punto de
masa m tiene la dirección de la normal a la misma.
W = λ ⋅ grad ⋅ f
∂f
∂f
∂f
W = λ ⋅ ⋅i + λ ⋅ ⋅ j + λ ⋅ ⋅ k
∂x
∂y
∂z
λ = coeficiente escalar de proporcionalidad.
Las derivadas parciales representan los cosenos directores de la normal a la
superficie. La ecuación fundamental de la dinámica toma la forma:
d 2 (P − 0 )
= F + W = F + λ ⋅ grad ⋅ f
dt 2
d 2 (P − 0 )
∂f
∂f
∂f
m
= F + λ ⋅ ⋅i + λ ⋅ ⋅ j + λ ⋅ ⋅ k
2
∂z
∂y
∂x
dt
O bien escalarmente:
m
m
d 2x
2
= Fx + λ ⋅
∂f
∂x
2
= Fy + λ ⋅
∂f
∂y
= Fz + λ ⋅
∂f
∂z
dt
d2y
m
m
dt
d 2z
dt 2
Este sistema con la ecuación de la superficie permite calcular en general x, y, z y λ
con lo que queda determinado el movimiento y la reacción del camino.
Obtenido λ
2
2 ⎛ ∂f ⎞
2
2
2
2
⎛ ∂f ⎞
⎛ ∂f ⎞ ⎛ ∂f ⎞ ⎛ ∂f ⎞
W = λ ⋅ ⎜ ⎟ + λ ⋅ ⎜⎜ ⎟⎟ + λ2 ⋅ ⎜ ⎟ = λ ⋅ ⎜ ⎟ + ⎜⎜ ⎟⎟ + ⎜ ⎟
⎝ ∂x ⎠
⎝ ∂z ⎠
⎝ ∂x ⎠ ⎝ ∂y ⎠ ⎝ ∂z ⎠
⎝ ∂y ⎠
2 ⎛ ∂f ⎞
Digitalización y compaginación: José.L.Sidoti
2
Página 15 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Movimiento de un punto sobre una línea
La ecuación que define a la línea es:
f1 ( x, y, z , t ) = 0 ⎫
⎬
f 2 ( x, y , z , t ) = 0 ⎭
Si la línea es lisa la reacción será:
W = λ1 ⋅ grad ⋅ f1 + λ2 ⋅ grad ⋅ f 2
⎛
∂f ⎞
∂f ⎞
∂f
∂f
∂f ⎞
∂f
⎛
⎛
W = ⎜ λ1 ⋅ 1 + λ2 ⋅ 2 ⎟ ⋅ i + ⎜⎜ λ1 ⋅ 1 + λ2 ⋅ 2 ⎟⎟ ⋅ j + ⎜ λ1 ⋅ 1 + λ2 ⋅ 2 ⎟ ⋅ k
∂z ⎠
∂y ⎠
∂z
∂y
∂x ⎠
∂x
⎝
⎝
⎝
Si F es la resultante de las fuerzas directamente aplicadas al punto P la ecuación
fundamental de la dinámica es:
m
m
d 2 (P − 0 )
dt 2
d 2 (P − 0 )
dt
2
= F + W = F + λ1 ⋅ grad ⋅ f1 + λ2 ⋅ grad ⋅ f 2
⎛
∂f
∂f ⎞
∂f
∂f ⎞
∂f
∂f ⎞
⎛
⎛
= F + ⎜ λ1 ⋅ 1 + λ2 ⋅ 2 ⎟ ⋅ i + ⎜⎜ λ1 ⋅ 1 + λ2 ⋅ 2 ⎟⎟ ⋅ j + ⎜ λ1 ⋅ 1 + λ2 ⋅ 2 ⎟
∂x
∂x ⎠
∂y
∂y ⎠
∂z
∂z ⎠
⎝
⎝
⎝
Y en sus proyecciones:
d 2x
∂f
∂f
= Fx + λ1 ⋅ 1 + λ2 ⋅ 2
∂x
∂x
dt 2
∂f
∂f
d2y
m
= Fy + λ1 ⋅ 1 + λ2 ⋅ 2
∂y
∂y
dt 2
m
d 2z
∂f
∂f
= Fz + λ1 ⋅ 1 + λ2 ⋅ 2
∂z
∂z
dt
Sistema que con las ecuaciones de la línea permiten en general calcular los valores de
x, y, z , λ1 y λ2 que resuelven el problema.
Ejemplo:
Punto material de masa m que se mueve por acción de su propio peso sobre un plano
inclinado sin rozamiento.
m
2
Digitalización y compaginación: José.L.Sidoti
Página 16 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
El plano xy según puede observarse en la figura siguiente, da la sección normal del
plano inclinado y el plano horizontal (ángulo diedro).
y
= tgα ; y = x ⋅ tgα ; y − x ⋅ tgα = 0
x
La ecuación de la superficie es: f ( x, y, z , t ) = y − x ⋅ tgα = 0
∂f
∂f
W = λ ⋅ ⋅ i + λ ⋅ ⋅ j = −λ ⋅ tgα ⋅ i + λ ⋅ j es la reacción.
∂x
∂y
Fx = 0 ; Fy = − P son las componentes de la fuerza actuante.
Luego se puede establecer:
m⋅
m⋅
d 2x
dt 2
d2y
dt 2
(1)
= −λ ⋅ tgα
= −P + λ
(2)
d 2 y d 2x
dy dx
=
⋅ tgα
= ⋅ tgα y
dt dt
dt 2
dt 2
⎧ − P + λ = −λ ⋅ tg 2α
d 2x
d2y
⎪
P
m⋅
= m⋅
⋅ tgα → ⎨
= P ⋅ cos 2 α
λ= 2
dt 2
dt 2
⎪
tg α + 1
⎩
Reemplazando en (1):
De y = x ⋅ tgα se tiene
m⋅
d 2x
2
= − P ⋅ cos 2 α ⋅ tgα = − m ⋅ g ⋅ cos α ⋅ senα
dt
d 2x
= − g ⋅ cos α ⋅ senα
dt 2
dx
= − g ⋅ cos α ⋅ senα ⋅ dt = − g ⋅ t ⋅ cos α ⋅ senα
Vx =
dt ∫
x = ∫ − g ⋅ t ⋅ cos α ⋅ senα ⋅ dt = − g ⋅
t2
⋅ cos α ⋅ senα
2
Digitalización y compaginación: José.L.Sidoti
Página 17 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Reemplazando en (2):
m⋅
d2y
2
(
)
= − P + P ⋅ cos 2 α = P ⋅ cos 2 α − 1 = − P ⋅ sen 2α = −m ⋅ g ⋅ sen 2α
dt
2
d y
t2
= − g ⋅ sen 2α ; V y = − g ⋅ t ⋅ sen 2α ; y = − g ⋅ ⋅ sen 2α
2
dt 2
V = V x2 + V y2 = g ⋅ t ⋅ cos 2 α ⋅ sen 2α + sen 4α = g ⋅ t ⋅ senα
t2
⋅ senα
2
Que son las ya conocidas fórmulas del plano inclinado.
s = g⋅
Digitalización y compaginación: José.L.Sidoti
Página 18 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
BOLILLA Nº 6
DINÁMICA DEL MOVIMIENTO VIBRATORIO
•
•
•
•
•
•
VIBRACIONES LIBRES, AMORTIGUADAS Y FORZADAS.
AMORTIGUACIÓN CRÍTICA, SOBREAMORTIGUADA E
INFRACRÍTICA.
COEFICIENTE DE MAGNIFICACIÓN DINÁMICA, RESONANCIA.
APLICACIÓN AL MOVIMIENTO RELATIVO.
AISLAMIENTO DE VIBRACIONES.
ANALOGÍA ELECTROMECÁNICA.
Digitalización y compaginación: José.L.Sidoti
Página 19 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Dinámica del movimiento vibratorio
Oscilaciones libres
Sea un resorte con una masa suspendida de peso G = m ⋅ g , este peso equivale a una
fuerza aplicada sobre el resorte. Si se supone que esa fuerza se aplica gradualmente,
sin choques, el resorte pasa de la posición A − A (sin carga) a la B − B y se deforma
una magnitud ye ; a la posición B − B la llamamos de equilibrio estático y en ella se
equilibra el peso G con una fuerza igual y contraria que es la fuerza elástica dada
por Hooke y que vale:
0 sea que en
Fe = − k1 ⋅ ye ( k1 : Constante eléctrica del resorte)
O será:
R = ∑ Fi = 0 ; G + Fe = 0 ; G − k1 ⋅ ye = 0
Si llevamos la masa a B ' − B ' (deformación ye + yo ) y la soltamos, el peso asciende
hasta O , lo sobrepasa y se detiene en un punto simétrico de B ' respecto a O
invirtiendo su movimiento, o sea el sistema comienza a oscilar. En otro punto como
B '' la fuerza elástica ya no vale − k1 ⋅ ye sino que es mayor,
Fe = − k1 ⋅ ( ye + y ) = −k1 ⋅ δ .
Como el movimiento no es uniforme, ya que se detiene en los extremos, habrá una
cierta aceleración. Tomamos a O ' como punto de referencia y a O como centro de
oscilaciones. En un punto como B '' habrá una fuerza resultante:
Fe = −k1 ⋅ ( ye + y ) + G = m ⋅
d2y
2
= −k1 ⋅ ye − k1 ⋅ y + G = −k1 ⋅ y ∴
dt
Que es la ecuación diferencial del movimiento oscilatorio libre.
d2y
dt
Digitalización y compaginación: José.L.Sidoti
2
=
− k1
⋅y
m
Página 20 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Oscilaciones amortiguadas
Sea el dispositivo de la figura siguiente, si la masa estuviese soportada solo por
resortes oscilaría libremente y se cumpliría la ecuación ya vista. Si agregamos un
amortiguador, al bajar el pistón (Veloc. +, en el sentido de +y) el líquido asciende,
creando por rozamiento viscoso una fuerza dirigida hacia arriba, y cuando el pistón
sube (veloc. - ) la fuerza de amortiguación va hacia abajo. A la oscilación libre se
agrega ahora una fuerza debida al amortiguador, fuerza amortiguadora, que está
constantemente dirigida en sentido opuesto al movimiento y es proporcional a la
velocidad: Fa = − k 2 .v
La ecuación diferencial del movimiento será entonces:
d2y
dt
2
=
− k1
k
⋅ y − 2 ⋅v
m
m
Fc = m1 ⋅ ω 2 ⋅ r
Fv = Fc ⋅ senθ ; θ = ω ⋅ t
Fv = Fc ⋅ senω ⋅ t
Oscilaciones perturbadas
Supongamos que la masa que hemos aplicado en la figura anterior es la de un motor
eléctrico y que el centro de gravedad de su masa rotante ( m1 ) no coincide con el eje
de rotación (caso por demás común), aparece entonces una fuerza centrífuga Fc que
tiene dos componentes Fh y Fv .
Consideraremos únicamente la componente vertical Fv porque estamos tomando
como eje del movimiento el eje vertical.
Digitalización y compaginación: José.L.Sidoti
Página 21 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
La ecuación diferencial del movimiento es ahora:
d2y
dt
2
F
k
k
+ 1 ⋅ y + 2 ⋅ v = ± c ⋅ senω ⋅ t
m
m
m
Vamos a estudiar el problema en sus tres casos.
OSCILACIONES LIBRES
d2y
k1
d2y
La ecuación obtenida
+ ⋅ y = 0 puede escribirse
+ p 2 ⋅ y = 0 que es la
2
2
m
dt
dt
k
ecuación diferencial de un movimiento armónico simple, donde p = 1 es la
m
pulsación del mismo.
La solución de esta ecuación diferencial es:
y = A ⋅ sen( p ⋅ t + ϕ 0 )
Donde A y ϕ 0 son las dos constantes de integración que podemos determinar
partiendo de las condiciones iniciales del movimiento:
Si para t = 0 , y = y0 resulta: y = A ⋅ senϕ 0
dy
Tomando la expresión de la velocidad: v =
= A ⋅ p ⋅ cos( p ⋅ t + ϕ 0 )
dt
Que para t = 0 nos da: v0 = A ⋅ p ⋅ cos ϕ 0
y
A ⋅ senϕ 0
y
Luego: 0 =
de donde: tgϕ 0 = p ⋅ 0
v0 A ⋅ p ⋅ cos ϕ 0
v0
Y elevando al cuadrado y sumando se tiene:
⎫
⎪
2
2
2
y0 = A ⋅ sen ϕ 0 ⎪
⎪⎪
v02
v2
= A2 ⋅ cos 2 ϕ 0 ⎬ ∴ A = y02 + 0
p2
p2
⎪
⎪
v2
y02 + 0 = A2 ⎪
⎪⎭
p2
Esto nos indica que A es constante; el resorte no dejaría nunca de oscilar, sin
embargo lo hace por histéresis mecánica y resistencia del aire.
Si v0 ≠ 0 es A > y0 . Si v0 = 0 es A = y0 .
En todo el razonamiento no se tuvo en cuenta la masa del resorte.
Digitalización y compaginación: José.L.Sidoti
Página 22 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
OSCILACIONES AMORTIGUADAS
Partiendo de la ecuación obtenida para tal caso:
d2y
k
k
= − 1 ⋅ y − 2 ⋅v
m
m
dt 2
k
k
En la cual si se hace: 1 = p 2 y 2 = 2C nos queda ordenando:
m
m
d2y
dy
+ p2 ⋅ y = 0
2
dt
dt
Ecuación diferencial de 2º orden completa y sin término independiente.
+ 2C ⋅
La solución es: A ⋅ e r1 ⋅t + A ⋅ e r2 ⋅t
Los valores r1 y r2 se obtienen de la solución de la ecuación característica:
r 2 + 2 ⋅ c ⋅ r + p2 = 0
r = −c ± c 2 − p 2
Que puede dar tres tipos de soluciones:
1) Dos raíces reales y coincidentes r1 = r2 = 0
(c = p )
(c > p )
(c < p )
2) Dos raíces reales y diferentes, cuando c 2 − p 2 > 0
3) Dos raíces imaginarias, cuando c 2 − p 2 < 0
Analizaremos cada una de estas
soluciones.
1) Primera solución (c = p ) AMORTIGUACIÓN CRITICA.
La ecuación que nos da las elongaciones en función del tiempo se transforma en:
y = A ⋅ e −ct + B ⋅ e −ct
y = ( A + B ) ⋅ e −ct
y = U ⋅ e −ct
Donde U no es constante sino que es función del tiempo, en efecto:
dy dU − ct
=
⋅ e − c ⋅ U ⋅ e − ct
dt
dt
d2y
dt 2
=
d 2U
dt 2
⋅ e − ct − c ⋅
⎡ d 2U
⎤
dU
dU − ct
dU − ct
⋅e − c⋅
− 2⋅c⋅
+ c 2 ⋅U ⎥ ⋅ e − ct
⋅ e + c 2 ⋅U ⋅ e − ct = ⎢
2
dt
dt
dt
⎣⎢ dt
⎦⎥
Valores que remplazados
en la ecuación
d2y
dt 2
+ 2C ⋅
dy
+ p 2 ⋅ y = 0 da:
dt
Digitalización y compaginación: José.L.Sidoti
Página 23 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
⎡ d 2U
⎤
dU
dU
⎡
⎤
+ c 2 ⋅ U ⎥ ⋅ e − ct + ⎢2 ⋅ c ⋅
− 2 ⋅ c 2 ⋅ U ⎥ ⋅ e − ct + c 2 ⋅ U ⋅ e − ct = 0
⎢ 2 − 2⋅c⋅
dt
dt
⎣
⎦
⎣⎢ dt
⎦⎥
d 2U
=0
dt 2
Luego la derivada primera es constante y la función puede ser:
U = A + B ⋅t
Con lo que:
y = A ⋅ e −ct + B ⋅ t ⋅ e −ct
Cálculo de A y B
Partimos de las condiciones iniciales:
Para t = 0 resulta y0 = A
Si derivamos la ecuación de las elongaciones obtenemos las velocidades:
dy
= v = − A ⋅ c ⋅ e − ct + B ⋅ e − ct − B ⋅ c ⋅ t ⋅ e − ct
dt
dy
= v = B ⋅ e − ct − c ⋅ e − ct ( A + B ⋅ t )
dt
Para t = 0 puede ser que v0 = 0 o v0 ≠ 0 , este último es el caso más general:
v0 = B − c ⋅ A = B − c ⋅ y 0 ∴ B = v0 + c ⋅ y 0
Reemplazando en las ecuaciones que nos dan las elongaciones y las velocidades en
función del tiempo, los valores de A y B encontrados, se obtienen las siguientes
ecuaciones:
y = [ y0 + (v0 + c ⋅ y0 ) ⋅ t ]⋅ e −ct
[
]
v = v0 ⋅ (1 − c ⋅ t ) − c 2 ⋅ y0 ⋅ t ⋅ e − ct
Que nos definen el movimiento.
A manera de ejemplo y para considerar físicamente como se produce el movimiento,
consideremos el caso particular en que v0 = 0 y grafiquemos en función del tiempo
las expresiones anteriores en estas condiciones.
y = y0 ⋅ (1 + c ⋅ t ) ⋅ e −ct
v = −c 2 ⋅ y0 ⋅ t ⋅ e −ct
Cuando t = 0 y = y0 y cuando t → ∞ y cuando t → 0 porque e −ct → 0 más
dy
rápidamente que ct → ∞ . Para t = 0 v0 = 0 y como v =
significa que en y = y0
dt
hay un máximo (tangente horizontal).
Digitalización y compaginación: José.L.Sidoti
Página 24 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
A partir de cero, v retorna a cero, pero como hay movimiento la velocidad deberá
pasar por un máximo, que en este caso será negativo en virtud del signo de la
expresión que da v . Veremos cual es ese máximo y en que tiempo se produce.
Derivando la velocidad e igualando a cero se tiene:
dv
= −c 2 ⋅ y0 ⋅ e − ct + c 3 ⋅ y0 ⋅ t ⋅ e − ct = 0
a=
dt
a = c 2 ⋅ y0 ⋅ e −ct ⋅ (ct − 1) = 0
1
c , y0 , e −ct son distintos de cero, luego debe ser ct − 1 = 0 ∴ t =
c
Remplazando este valor en las expresiones de la velocidad y de la elongación se
obtienen los valores de vmax e yv max :
2 ⋅ y0
c ⋅ y0
; yv max =
= 0,7356 y0
e
e
Este es el caso de amortiguamiento crítico c = cc = p el movimiento es aperiódico,
en el límite de aperiodicidad.
Si se hubiera partido de la condición t = 0 v0 ≠ 0 la masa podría haber llegado a la
posición de equilibrio con suficiente energía cinética como para sobrepasarla, pero
puede demostrarse que en este caso, nunca podrá repasarla otra vez y solo se acercará
a ella para t → ∞ .
vmax = −
2) Segunda solución (c > p ) SISTEMA SOBREAMORTIGUADO.
La ecuación característica nos daba dos raíces reales y diferentes:
y = A⋅e
(− c +
)
c 2 − p 2 ⋅t
+ B ⋅e
(− c +
)
c 2 − p 2 ⋅t
Digitalización y compaginación: José.L.Sidoti
Página 25 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
La masa una vez separada de su posición de equilibrio tiende a volver a el
asintóticamente, pero empleando un tiempo mucho mas largo que en el problema
anterior; el movimiento es lógicamente aperiódico. No reviste interés práctico.
3) Tercera solución (c < p ) AMORTIGUACIÓN INFRACRÍTICA.
Para esta condición la ecuación característica, tiene dos raíces imaginarias
r1 , r2 = −c ± j p 2 − c 2
Y la solución de la ecuación diferencial y = A ⋅ e r1t + B ⋅ e r1t
(
Se transforma en y = C ⋅ e − ct ⋅ sen ω p ⋅ t + ϕ
)
Donde ω p es la pulsación del sistema amortiguado ω p = p 2 − c 2 ∴ω p < p
Lo que nos dice que el periodo del movimiento amortiguado es mayor que el del
2π
2π
> TL =
movimiento libre T A =
p
p2 − c2
Cálculo de C y ϕ
(1)
Para t = 0 será y0 = C ⋅ senϕ
Ecuación con dos incógnitas por lo que recurrimos a la expresión de la velocidad:
dy
v=
= −C ⋅ c ⋅ e − ct ⋅ sen ω p ⋅ t + ϕ + C ⋅ e − ct ⋅ cos ω p ⋅ t + ϕ ⋅ ω p
dt
Que para t = 0 da: v0 = −C ⋅ c ⋅ senϕ + C ⋅ ω p ⋅ cos ϕ
(
)
(
v0 = C ⋅ ω p ⋅ cos ϕ − c ⋅ y0
)
(2)
y
De (1) se obtiene: senϕ = 0
C
v0 + c ⋅ y 0
Y de (2): cosϕ =
C ⋅ω p
Dividiendo miembro a miembro nos da: tgϕ =
ϕ ; elevando al cuadrado y sumando:
y0 ⋅ ω p
v0 + c ⋅ y 0
que nos permite encontrar
Digitalización y compaginación: José.L.Sidoti
Página 26 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
sen ϕ =
2
y02
C2
; cos
2
(
v0 + c ⋅ y0 )2
; C2 =
ϕ=
y02 ⋅ ω 2p + (v0 + c ⋅ y0 )2
C 2 ⋅ ω 2p
ω 2p
Que nos permite determinar C quedando en consecuencia la expresión de las
[y
elongaciones y =
2
2
2
0 + ω p + (v0 + c ⋅ y0 )
]
1
2
ωp
(
)
⋅ e − ct ⋅ sen ω p ⋅ t + ϕ .
Si graficamos esta ecuación en función del tiempo, tendremos que y nunca alcanza el
valor C pues para t = 0
1
2
[
]
y=
⋅ senϕ
ωp
y para t ≠ 0 influye e −ct que hace
disminuir las ordenadas de la curva simétricamente a ambos lados del eje t ( c =
decremento logarítmico).
Si t → ∞ e −ct → 0
Esto es semejante al movimiento oscilatorio amortiguado estudiado en cinemática y
que obteníamos proyectando sobre un eje coplanar el movimiento de un punto que
describía una espiral logarítmica, en este caso el vector rotante tiene módulo
decreciente en el tiempo
rotación es ω p .
según la ley C ⋅ e −ct y la velocidad constante de
OSCILACIONES PERTURBADAS
La ecuación diferencial obtenida para este caso es:
Digitalización y compaginación: José.L.Sidoti
Página 27 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
d2y
dt 2
+ 2⋅c⋅
F
dy
+ p 2 ⋅ y = q ⋅ senω ⋅ t ∴ q = c
dt
m
Como en una ecuación no homogénea, la solución será la suma de la solución
general de la ecuación homogenizada, más una solución particular.
y = y1 + y 2
La primera es la vibración amortiguada ya vista:
[y
y=
2
0
]
1
+ ω 2p + (v0 + c ⋅ y0 )2 2
ωp
(
⋅ e − ct ⋅ sen ω p ⋅ t + ϕ
)
Que desaparece con el tiempo; según el valor de c lo hará más o menos rápidamente,
se le llama FUNCIÓN TRANSITORIA.
La segunda es un movimiento armónico simple:
y 2 = B ⋅ sen(ω ⋅ t −ψ )
Que es la FUNCIÓN PERMANENTE y es la que estudiaremos.
En la figura siguiente se representado sucesivamente:
1. La función transitoria (Movimiento libre) y1 .
2. La función permanente (Movimiento forzado) y 2 .
3. El movimiento total (suma de los dos anteriores) y .
Digitalización y compaginación: José.L.Sidoti
Página 28 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Digitalización y compaginación: José.L.Sidoti
Página 29 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Cálculo de B y ψ :
v=
a=
dy
= B ⋅ ω ⋅ cos(ω ⋅ t −ψ )
dt
d2y
2
= − B ⋅ ω 2 ⋅ sen(ω ⋅ t − ψ )
dt
Valores que remplazados en la ecuación diferencial del movimiento y haciendo en el
segundo miembro de la misma:
sen ω ⋅ t = sen [(ω ⋅ t − ψ ) + ψ ]
Y desarrollando, dan:
− B ⋅ sen(ω ⋅ t −ψ ) + 2 ⋅ cBω ⋅ cos(ω ⋅ t −ψ ) + p 2 B ⋅ sen(ω ⋅ t −ψ ) = q ⋅ sen[(ω ⋅ t −ψ ) +ψ ]
(
)
2 ⋅ cBω ⋅ cos(ω ⋅ t −ψ ) + B ⋅ p 2 − ω 2 ⋅ sen(ω ⋅ t −ψ ) = q ⋅ [sen(ω ⋅ t −ψ )cosψ + cos(ω ⋅ t −ψ )senψ ]
Para que la igualdad se cumpla los coeficientes de sen(ω ⋅ t −ψ ) y cos(ω ⋅t −ψ ) en
ambos miembros deben ser iguales:
2 ⋅ cBω = q ⋅ senψ
(
)
B p 2 − ω 2 = q ⋅ cosψ
2 ⋅ cB
que permite obtener el
Dividiendo miembro a miembro se tiene tgψ =
p2 − ω 2
ángulo ψ . Elevando al cuadrado y sumando:
(2 ⋅ cBω )2 = q 2 ⋅ sen 2ψ
(
)2
(
B 2 p 2 − ω 2 = q 2 ⋅ cos 2 ψ
2⎤
⎡
B 2 ⎢(2cω )2 + p 2 − ω 2 ⎥ = q 2
⎣
⎦
)
Que nos da:
B=
q
(p 2 − ω 2 )2 + (2cω )2
Con lo que la función permanente queda:
y=
(p
q
2
−ω
)
2 2
+ (2cω )
⋅ sen(ω ⋅ t − ψ )
2
Digitalización y compaginación: José.L.Sidoti
Página 30 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
COEFICIENTE DE MAGNIFICACIÓN DINÁMICA
Si en la expresión de B se saca p 2 factor común fuera del signo radical, se tiene:
q
B=
2
2
⎛ ω2 ⎞
⎛ 2cω ⎞
2 ⎜
⎟ +⎜
⎟
p
1−
2⎟
⎜ p2 ⎟
⎜
p
⎝
⎠
⎠
⎝
k
q
q ⋅ m Fc
Recordando que p 2 = 1 es
=
=
= ye .
2
k1
k1
m
p
Es decir es la deformación que provocaría la fuerza perturbadora actuando
estáticamente; cuando dicha fuerza actúa en forma dinámica la deformación será:
ye
yd =
2
2
⎛ ω 2 ⎞ ⎛ 2cω ⎞
⎜1 −
⎟ +⎜
⎟
2⎟
⎜ p2 ⎟
⎜
p
⎠
⎝
⎠ ⎝
Que expresada en función del coeficiente de amortiguación crítica ( p = cc ) es:
yd =
ye
ye
=
2
2
2
2⎞
⎛
⎜1 − ω ⎟ + ⎛⎜ 2 ⋅ c ⋅ ω ⎞⎟
⎜ c p⎟
⎜
p 2 ⎟⎠
c
⎝
⎠
⎝
2
2⎞
⎛
⎜1 − ω ⎟ + ⎜⎛ 2 ⋅ c ⋅ ω ⎟⎞
⎜ p p⎟
⎜
p 2 ⎟⎠
⎝
⎠
⎝
De acuerdo a la ley de Hooke que establece que dentro del periodo elástico las
tensiones son proporcionales a las deformaciones:
Gd y d
=
=ν
Ge
ye
ν : es el COEFICIENTE DE MAGNIFICACIÓN DINÁMICA y su valor es:
ν=
1
2
⎛ ω 2 ⎞ ⎛ c ω ⎞2
⎜1 −
⎟ + ⎜2⋅ ⋅ ⎟
⎜
⎟
2⎟
⎜
p
⎝
⎠ ⎝ cc p ⎠
ω : puede variarse a voluntad, variando la velocidad del motor en nuestro ejemplo;
p no se puede variar tan fácilmente, es función de las características del sistema ( k1
y m ).
ν : será máximo cuando el radicando sea minino. Nos interesan los valores prácticos
que ν puede tomar, para ello graficamos:
Digitalización y compaginación: José.L.Sidoti
Página 31 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
ω
= 0 esto nos hace obtener para ν el valor uno (ν = 1 )
p
para cualquier valor de la constante de amortiguación c . En este caso Fc = 0
ya
que ω = 0 y la deformación dinámica resulta igual a la deformación estática.
Consideremos primero que
ω
1
(1)
c
p
2
cc
cc : No se puede variar pero c sí (se cambia el amortiguador).
Si en (1) hacemos
c = cc , la amortiguación del sistema igual a la amortiguación
1
crítica, resulta: ν =
2
Si en la misma expresión (1) hacemos c > cc estamos en la condición de
sobreamortiguamiento que no nos interesaba desde el punto de vista práctico.
Por último consideremos que en (1) c < cc por ejemplo c = 0,2 ⋅ cc
1
1
ν=
=
= 2,5
2 ⋅ 0,2 0,4
Supongamos ahora que
= 1 en este caso ν =
Se puede comprobar dando otros valores que a medida que c disminuye, ν aumenta,
y para c = 0 ν = ∞ caso ideal sin amortiguador.
Consideremos ahora que la relación
ω
p
→ ∞ , en este caso para cualquier valor de c ,
ν → 0.
En la figura de la página siguiente se han graficando los valores de ν para distintos
ω
valores del coeficiente de amortiguamiento en función de la relación . Se observa
p
ω
que ν adquiere los máximos valores para lo relación
= 1 , es decir cuando la
p
pulsación de la carga perturbadora coincide con la pulsación propia del sistema, esta
es la condición de RESONANCIA y se ve que para c = 0 (sistema sin amortiguación)
(ν = ∞ ) la deformación se hace infinita, pero la experiencia dice que no ocurre así,
sino el sistema se deformaría súbitamente y no alcanzaría a vibrar; en la realidad se
deforma lentamente y se rompe.
Digitalización y compaginación: José.L.Sidoti
Página 32 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Análisis del defasaje ψ
2 ⋅ c ⋅ω
2 ⋅ c ⋅ω
tgψ =
p −ω
2
2
p
=
1−
2
ω2
p2
2⋅
=
c ω
⋅
cc p
1−
ω2
p2
⎛ω ⎞
Si representamos gráficamente ψ = f ⎜⎜ ⎟⎟
⎝ p⎠
c
= 1 se tiene para:
Para
cc
ω
p
ω
p
ω
p
=0
tgψ = 0
=1
tgψ = ∞ ψ =
→∞
ψ =0
π
2
tgψ = 0 ψ = π
Sin amortiguamiento ( c = 0 ) las oscilaciones forzadas están en fase con la fuerza
ω
< 1 y medio ciclo fuera de fase para
ω
> 1.
p
p
Se observa también que en la condición de resonancia la fuerza y las oscilaciones
están en cuadratura.
perturbadora para
Digitalización y compaginación: José.L.Sidoti
Página 33 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
CÁLCULO DE ν PARA c = 0 y ω ≠ p
1
ν=
2
⎛ ω 2 ⎞ ⎛ c ω ⎞2
⎜1 −
⎟ + ⎜2⋅ ⋅ ⎟
⎜
⎟
2⎟
⎜
p ⎠ ⎝ cc p ⎠
⎝
1
Si c = 0 y ω ≠ p será: ν =
1
=
=
p2
2
ω2
p2 − ω 2
⎛ ω2 ⎞
1−
⎟
⎜1 −
pp
2⎟
⎜
p
⎠
⎝
Donde ω es la pulsación perturbadora y p la pulsación propia del sistema. Siendo
π ⋅n
ω proporcional a n (r.p.m.) ω =
30
Resulta:
n2
ν= 2 c 2
nc − n
Donde n es el número de revoluciones por minuto del motor en nuestro ejemplo que
es dato; nc es el número de revoluciones crítico del sistema, veamos como puede
calcularse:
F
ye
2 k1
p = =
m G
g
Donde k1 es la relación entre la fuerza y la deformación que esta produce cuando se
la aplica estáticamente; si F = G , ye es la deformación estática producida por G y
g
p 2 resulta: p 2 =
ye
ye , es la flecha estática en el caso de árboles, vigas, etc. ( f )
p=
g
π ⋅ nc
; ωc =
= p=
f
30
g
f
∴ nc =
30 g
π
f
Digitalización y compaginación: José.L.Sidoti
Página 34 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
De donde: nc ≅
300
f
En el gráfico los valores de ν
comprendidos entre
ω
p
0,75 y 1,25 son
ω
= 1 las
p
curvas forman un haz cerrado (se confunden) se puede trabajar con la curva
correspondiente a c = 0 (sin amortiguación).
PELIGROSOS y nunca se debe trabajar entre ellos, y como cerca del eje
APLICACIÓN AL MOVIMIENTO RELATIVO
En el dispositivo de la figura la masa m puede tener un movimiento relativo respecto
al marco o soporte S al que se encuentra vinculado por medio del resorte de
constante k1 y el amortiguador de constante k 2 . EI soporte S a su vez puede
moverse con un movimiento de arrastre, cuya ley suponemos:
xa = X a ⋅ cos ω ⋅ t
Se pretende determinar la ley del movimiento absoluto de la masa m .
xab = xr + xa
Y también:
d 2 xab
dt 2
=
d 2 xr
dt 2
+
d 2 xa
dt 2
La ecuación diferencial del movimiento absoluto será:
m⋅
d 2 xab
dt 2
+ k2 ⋅
dxr
+ k1 ⋅ xr = 0
dt
Donde la fuerza elástica del resorte y la fuerza amortiguadora dependen lógicamente
del movimiento relativo.
Digitalización y compaginación: José.L.Sidoti
Página 35 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
d 2 xa
dt
2
= − X a ⋅ ω 2 ⋅ cos ω ⋅ t
Remplazando en la ecuación diferencial, operando y ordenando queda:
m⋅
d 2 xr
dt 2
d 2 xr
dt
2
+ m⋅
+ 2⋅c⋅
d 2 xa
dt 2
+ k2 ⋅
dxr
+ k1 ⋅ xr = 0
dt
dxr
+ p 2 ⋅ xr = X a ⋅ ω 2 ⋅ cos ω ⋅ t
dt
Que es la ecuación diferencial de un movimiento vibratorio amortiguado con carga
perturbadora, ya resuelto, cuya función permanente era:
y = B ⋅ cos(ω ⋅ t −ψ )
Donde ahora es:
B=
Xa ⋅ω2
(p 2 − ω 2 )2 + (2 ⋅ c ⋅ ω )2
= X r ; tgψ =
2 ⋅ c ⋅ω
p2 − ω 2
Hemos obtenido para el movimiento relativo un movimiento armónico simple, de
pulsación idéntica a la del movimiento de arrastre; en consecuencia el movimiento
absoluto será la composición de esos dos movimientos armónicos simples de igual
pulsación, que de acuerdo a lo visto en cinemática (Bolilla IV – Pág. 47), resulta otro
movimiento armónico simple, de la misma pulsación que los componentes cuya
semiamplitud es la suma geométrica de las semiamplitudes de aquellos.
Remplazando valores y teniendo en cuenta que:
cosψ =
1
1 + tg 2ψ
=
p2 − ω 2
(p 2 − ω 2 )2 + (2 ⋅ c ⋅ ω )2
Digitalización y compaginación: José.L.Sidoti
Página 36 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
2
X ab
=
X a2 ⋅ ω 4
+ X a2 +
(
2 ⋅ X a2 ⋅ ω 2 ⋅ p 2 − ω 2
)
(p 2 − ω ) + (2 ⋅ c ⋅ ω )2
(p 2 − ω ) + (2 ⋅ c ⋅ω )2
2
2
X ab
ω 4 + (p 2 − ω 2 ) + (2 ⋅ c ⋅ ω )2 + 2 ⋅ ω 2 ⋅ (p 2 − ω 2 )
De donde:
=
X a2
(p 2 − ω 2 )2 + (2 ⋅ c ⋅ω )2
2
[
p 4 + (2 ⋅ c ⋅ ω )2
ω 2 + (p 2 − ω 2 )] + (2 ⋅ c ⋅ ω )2
=
=
(p 2 − ω 2 )2 + (2 ⋅ c ⋅ ω )2 p 4 ⎡⎢⎛⎜1 − ω 2 ⎞⎟2 + ⎛⎜ 2 ⋅ c ⋅ ω ⎞⎟2 ⎤⎥
Se tiene:
2 2
⎢⎜
⎣⎢⎝
Finalmente:
X ab
=
Xa
p 2 ⎟⎠
⎛ c ω⎞
1 + ⎜⎜ 2 ⋅ ⋅ ⎟⎟
⎝ cc p ⎠
2 2
⎜
⎝
cc p ⎟⎠ ⎥
⎦⎥
2
2
2
⎛ ω2 ⎞
⎞
⎛
c
ω
⎜1 −
⎟ + ⎜2 ⋅ ⋅ ⎟
⎜ c p⎟
2⎟
⎜
p
c
⎝
⎠
⎝
⎠
Expresión que nos permite obtener las siguientes conclusiones:
Haciendo c = 0 (sin amortiguamiento); cuando
ω
tiende a cero, es decir, la
p
frecuencia del movimiento del cuadro es muy pequeña con respecto a la frecuencia
X
propia del sistema ab → 1 que nos dice que el sistema prácticamente acompaña al
Xa
soporte en su movimiento.
Si
ω
p
→ ∞ lo que ocurre cuando la pulsación del soporte es muy grande respecto a la
X ab
→ 0 y la masa tiende a quedar quieta en el espacio a pesar
Xa
del movimiento del cuadro. Se utiliza para suspensión de aparatos de medición que
deben aislarse del soporte.
Al considerar la respuesta de una masa suspendida elásticamente bajo la acción de
propia del sistema
una fuerza perturbadora periódica, para varios valoren de la relación
ω
p
, citaremos a
manera de colofón la observación de C. E. Inglis:
“En este comportamiento de la masa soportada elásticamente, hay algo casi
humano; se opone a ser empujada. Si se la insta gentilmente y no se le apura
demasiado, responde con perfecta docilidad; pero si es apremiada a moverse a un
ritmo mayor que el suyo normal, muestra una perversa obstinación. Dicho
movimiento efectuado bajo coacción, es siempre en una dirección retrógrada y
cuanto mayor es el apremio menor es la condescendencia a moverse. Por otra parte
Digitalización y compaginación: José.L.Sidoti
Página 37 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
si es estimulada con su propia frecuencia natural, se mueve con una exuberancia de
ánimo que puede ser comprometedora.”
AISLAMIENTO DE VIBRACIONES
La relación:
X ab
=
Xa
⎛ c ω⎞
1 + ⎜⎜ 2 ⋅ ⋅ ⎟⎟
⎝ cc p ⎠
2
2
2
⎛ ω2 ⎞
⎜1 −
⎟ + ⎛⎜ 2 ⋅ c ⋅ ω ⎞⎟
⎜ c p⎟
⎜
p 2 ⎟⎠
c
⎝
⎠
⎝
Entre la semiamplitud máxima del movimiento absoluto y la del movimiento
perturbador establece la EFECTIVIDAD del montaje para reducir las oscilaciones.
X
c
ω
Representando gráficamente ab en función de
y para diferentes valores de
Xa
p
cc
se observa que para cualquier relación
ω
p
> 2 la amplitud de la oscilación de la
masa será menor que la del soporte.
Digitalización y compaginación: José.L.Sidoti
Página 38 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
La principal diferencia entre estas curvas y las establecidas para ν en función de
ω
p
ω
> 2 las curvas amortiguadas se encuentran por encima de
p
las no amortiguadas. Esto nos hace ver que la presencia del amortiguador disminuye
la efectividad del montaje.
Sin embargo es necesario cierto amortiguamiento a fin de mantener la estabilidad en
las condiciones transitorias y para prevenir las amplitudes de resonancia al iniciarse o
detenerse el movimiento del soporte.
Consideremos ahora el caso del motor eléctrico con masa excéntrica plantea do
anteriormente (vibraciones amortiguadas con carga perturbadora).
Si se pretende aislar la máquina del cimiento de manera que se reduzca la fuerza
transmitida, agregamos un resorte y un amortiguador.
es que para valores de
La fuerza aplicada al cimiento será la que corresponde a la acción del resorte y del
amortiguador:
dy
(1)
F = m ⋅ p2 ⋅ y + m ⋅ 2 ⋅ c ⋅
dt
Como habíamos encontrado que:
q
y=
⋅ sen(ω ⋅ t −ψ )
(p 2 − ω 2 )2 + (2 ⋅ c ⋅ω )2
Es:
dy
=
dt
(p
q ⋅ω
2
−ω
) + (2 ⋅ c ⋅ω )
2 2
⋅ cos(ω ⋅ t −ψ )
2
Que reemplazados en (1) y teniendo en cuenta que loe dos términos del segundo
miembro son fuerzas cuyos máximos están en cuadratura, la amplitud máxima de la
fuerza resultante será:
F=
(m ⋅ q ⋅ p 2 )2 + (m ⋅ 2 ⋅ c ⋅ q ⋅ ω )2
(p 2 − ω 2 )2 + (2 ⋅ c ⋅ω )2
Pero m ⋅ q = Fc luego:
⎛ 2 ⋅ c ⋅ω ⎞
⎟
p ⋅ 1+ ⎜
⎜ p2 ⎟
⎝
⎠
2
2
F
=
Fc
2 ⎞2
⎛ ω
⎛
⎞
⎟ + ⎜ 2 ⋅ c ⋅ω ⎟
p ⋅ ⎜1 −
⎜
p 2 ⎟⎠ ⎜⎝ p 2 ⎟⎠
⎝
2
2
=
⎛ c ω⎞
1 + ⎜⎜ 2 ⋅ ⋅ ⎟⎟
⎝ cc p ⎠
2
2
⎛ ω 2 ⎞ ⎛ c ω ⎞2
⎜1 −
⎟ + ⎜2⋅ ⋅ ⎟
⎜
⎟
2⎟
⎜
p ⎠ ⎝ cc p ⎠
⎝
Que establece la relación entre la fuerza transmitida al cimiento y la fuerza aplicada;
esta relación se denomina TRANSMISIBILIDAD y es exactamente la misma
Digitalización y compaginación: José.L.Sidoti
Página 39 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
ecuación obtenida en aislamiento de vibraciones y la curva anterior tiene plena
vigencia en este caso.
ANALOGÍA ELECTROMECÁNICA
Sea un circuito eléctrico con una resistencia R ; una inductancia L y una
capacitancia C conectadas en serie, a cuyos bornes se aplica tensión variable en
función del tiempo U = U (t ) .
Si i es la intensidad de corriente que circula, la caída de tensión en cada uno de los
elementos del circuito es:
U R = R ⋅i
di
UL = L⋅
dt
1
U c = ⋅ ∫ i ⋅ dt
C
Siendo: i =
dq
( q carga eléctrica medida en coulombios)
dt
dq
UR = R⋅
dt
d 2q
UL = L⋅
dt 2
1
UC = ⋅ q
C
De acuerdo con la segunda ley de Kirchoff (en todo circuito cerrado la sumatoria de
todas las caídas de tensión es igual a la fuerza electromotriz aplicada al mismo).
U R + U L + U C = U (t )
L⋅
d 2q
dt
2
+ R⋅
dq 1
+ ⋅ q = U ⋅ senω ⋅ t
dt C
Obtenemos aquí una ecuación análoga a la que obteníamos en el problema de un
sistema amortiguado con carga perturbadora.
L
R
1C
U
Coeficiente de autoinducción es ahora equivalente a la masa del sistema (m ) .
Resistencia es equivalente al coeficiente de amortiguación (k 2 ) .
Reciproca de la capacidad es equivalente a la constante del resorte (k1 ) .
Tensión aplicada es equivalente a la carga perturbadora.
Digitalización y compaginación: José.L.Sidoti
Página 40 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
p2 =
Existe resonancia cuando ω = p ; ω =
1
R
; 2⋅C =
LC
L
1
1
1
∴f =
⋅
LC
LC
2π
Que es la resonancia obtenida en Electrotecnia para los circuitos R, L, C
oscilantes.
Digitalización y compaginación: José.L.Sidoti
Página 41 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
BOLILLA N °7
GEOMETRÍA DE MASAS
•
•
•
•
BARICENTRO, PLANO DIAMETRAL Y DE SIMETRÍA, SISTEMAS
CONTINUOS.
MOMENTOS DE SEGUNDO ORDEN, MOMENTOS Y PRODUCTOS DE
INERCIA. TRANSLACIÓN DE EJES, TEOREMA DE STEINER.
ROTACION DE EJES, ELIPSOIDE DE INERCIA, EJES PRINCIPALES,
DETERMINACION, APLICACIONES.
MODULO DE INERCIA, APLICACIONES.
TEMAS AGREGADOS:
•
•
TEOREMAS DE GULDIN.
CONDICIONES DE SIMETRÍA.
Digitalización y compaginación: José.L.Sidoti
Página 42 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
CENTRO DE GRAVEDAD
Cuando en Estática se componía un sistema de fuerzas paralelas aplicadas, se obtenía
una resultante única aplicada en un punto llamado CENTROIDE, punto que no
cambiaba si se giraban las fuerzas tomando otra dirección pero manteniéndose
siempre paralelas.
Las coordenadas del CENTROIDE podían establecerse así:
xc =
∑ Fi ⋅ xi ;
∑ Fi
yc =
∑ Fi ⋅ yi ; z = ∑ Fi ⋅ zi
c
∑ Fi
∑ Fi
En particular si las fuerzas paralelas consideradas son el peso de cada partícula de un
sistema material, debido a la gravedad, las expresiones anteriores toman la forma:
∑ Pi ⋅ xi ;
xc = 1
∑ 1n Pi
n
∑ Pi ⋅ yi ; z = ∑1 Pi ⋅ zi
yc = 1
c
∑ 1n Pi
∑ 1n Pi
n
n
Donde xG ; yG ; zG que serían las coordenadas del Centroide, son ahora las
coordenadas del CENTRO DE GRAVEDAD ( CG ) del sistema considerado.
Teniendo en cuenta que P = m ⋅ g remplazando se tiene:
Digitalización y compaginación: José.L.Sidoti
Página 43 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
∑ mi ⋅ g ⋅ xi = g ⋅ ∑1 mi ⋅ xi = ∑1 mi ⋅ xi
xG = 1
g ⋅ ∑ 1n mi
∑ 1n mi ⋅ g
∑ 1n mi
n
n
mi ⋅ yi
mi ⋅ zi
∑
∑
1
1
; zG =
yG =
∑ 1n mi
∑ 1n mi
n
n
n
Donde se ha supuesto g constante para todos los puntos del sistema, se obtienen las
coordenadas del CENTRO DE MASA que en este caso coincide con el CG .
Si g varía de punto a punto el CG y el CENTRO DE MASA no coinciden.
Por último, teniendo en cuenta que m = V ⋅ δ (volumen por densidad) y considerando
el caso particular de δ constante, se puede establecer:
∑ Vi ⋅ xi ;
xG = 1
∑ 1n Vi
n
∑ Vi ⋅ yi ; z = ∑1Vi ⋅ zi
yc = 1
c
∑ 1n Vi
∑ 1n Vi
n
n
Que nos da también las coordenadas del CG , en este caso CENTRO
GEOMÉTRICO, trabajando únicamente con los volúmenes del cuerpo
independientemente de los pesos o de las masas.
Se observa que en todos los casos el numerador de la expresión que nos da cada una
de las coordenadas del CG es el momento estático del PESO, la MASA o el
VOLUMEN respecto a un plano; y el denominador es el PESO TOTAL; la MASA
TOTAL o el VOLUMEN TOTAL del sistema.
En los sólidos continuos y homogéneos pueden reemplazarse las sumatorias por las
integrales a lo largo del sólido.
Si trabajáramos vectorialmente se puede establecer que el vector posición del centro
de gravedad (también centro de masa para “ g ” constante) es:
∑ m ⋅ (Pi − O ) ∑1 mi ⋅ (Pi − O )
(G − O ) = 1 i n
=
M
∑1 mi
n
n
Donde M es la masa total del sistema.
PROPIEDADES DEL CENTRO DE MASA
A nuestros fines prácticos tornaremos indistintamente la designación de Centro de
Gravedad o Centro do Masa, en caso de ser necesario se hará notar expresamente su
diferencia.
1º Propiedad: Si todas las masas pertenecen a un mismo plano (o a una recta) su
centro de mana pertenece al plano (o a la recta).
Digitalización y compaginación: José.L.Sidoti
Página 44 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Eligiendo el punto “ O ” en el plano (o en la recta) los vectores (Pi − O ) estarán
contenidos todos en el plano (o en la recta) y por lo tanto (G − O ) estará en el plano
(o en la recta).
2º Propiedad: Todo sistema puede subdividirse en sistemas parciales, los que
tendrán un centro de masa parcial; el centro de masa total del sistema puede
determinarse considerando las masas parciales concentradas en los centros
respectivos.
3º Propiedad: Un sistema de puntos materiales tiene PLANO DIAMETRAL
conjugado de una dirección dada, cuando a cada punto material del sistema a un lado
Digitalización y compaginación: José.L.Sidoti
Página 45 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
del plano, corresponde otro de igual masa al otro lado del plano, a la misma distancia
sobre una recta paralela a la dirección dada. Son MASAS CONJUGADAS.
El sistema queda dividido así en tantas masas parciales como par de puntos
conjugados queden determinados. Si el plano diametral es perpendicular a la
dirección conjugada, las masas están sobre la perpendicular al plano que se llama
PLANO DE SIMETRÍA.
Si un sistema posee un plano diametral (en particular un plano de simetría) el centro
de masa está en ese plano. Si el sistema tiene dos planos diametrales (o de simetría)
el centro de masa está en la intersección de los dos planos.
Si el sistema admite tres planos diametrales (o de simetría) el centro de masa estará
en la intersección de los tres planos.
La figura representa la proyección sobre un plano de un elipsoide, a la izquierda se
observa el plano diametral (en su traza sobre el plano de proyección) conjugado de la
dirección dada; a la derecha un plano de simetría.
En la figura siguiente, el paralelepípedo recto cuya base es un paralelogramo (visto
en sus dos proyecciones), admite entre otros dos planos diametrales perpendiculares
a las bases y un plano de simetría paralelo a ellas; G estará en la intersección de los
tres.
Digitalización y compaginación: José.L.Sidoti
Página 46 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
TEOREMAS DE GULDIN
1) El área de la superficie generada por la rotación de cualquier curva plana
alrededor de un eje en su plano, que no la corte, es igual al producto de la
longitud de la curva por el arco recorrido por su centro de gravedad.
Supongamos un elemento muy pequeño Δli de curva, cuyo centro de gravedad esta
en Gi . Cada elemento en su rotación alrededor del eje “ y ” describe la superficie
lateral de un tronco de cono elemental de área ΔSi = 2π ⋅ xi ⋅ Δli .
La superficie total será: S = 2π ⋅ ∑1 Δli ⋅ xi
n
Donde
∑1 Δli ⋅ xi
n
es el momento estático de la curva respecto al eje “ y ” que de
acuerdo a lo visto vale:
∑1 Δli ⋅ xi = l ⋅ xG
n
Luego: S = 2π ⋅ xG ⋅ l
Donde 2π ⋅ xG es la longitud de la circunferencia descripta por el C. de G. de la
curva que obra como generatriz de la superficie y cuya longitud es “ l ”
Digitalización y compaginación: José.L.Sidoti
Página 47 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
2) El volumen del sólido generado por la rotación de cualquier figura plana
alrededor de un eje en su plano, que no la corte, es igual al producto del á rea de
la figura por el arco recorrido por su baricentro.
Supongamos un elemento de superficie como el indicado en la figura, su C. de G.
estará en Gi , a la distancia xi , del eje de rotación “ y ”.
En su rotación, dicha superficie elemental, generará un anillo cuyo volumen será
ΔVi = 2π ⋅ xi ⋅ ΔSi y el volumen total.
∑1 ΔSi ⋅ xi : es la sumatoria de los momentos estáticos de las superficies elementales
n
respecto al eje “ y ” e igual a S ⋅ X G . Luego V = 2π ⋅ X G ⋅ S .
Las expresiones obtenidas por los teoremas de Guldin pueden aplicarse obviamente
para la obtención de superficies y volúmenes de revolución correspondiente a
ángulos menores de 2π .
MOMENTOS DE 2º ORDEN
Momento de inercia de un punto material es el producto de la masa del mismo por el
cuadrado de la distancia a un punto, a un eje o a un plano, obteniéndose así el
momento de inercia POLAR; AXIAL o PLANAR respectivamente.
Estoa momentos se denominan también MOMENTOS DE 2º ORDEN y sus
[ ]
dimensiones son [N ] ⋅ L2 .
Consideremos el triedro de referencia y un punto material de masa m y coordenadas
x; y; z .
Se tendrá:
Momentos Planares
J x0 y = m ⋅ z 2
J x0 z = m ⋅ y 2
J y0 z = m ⋅ x 2
Digitalización y compaginación: José.L.Sidoti
Página 48 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Momentos Axiales:
(
)
J y = m ⋅ (x 2 + z 2 ) = J y 0 z + J x 0 y
J z = m ⋅ (x 2 + y 2 ) = J y 0 z + J x 0 y
J x = m ⋅ y 2 + z 2 = J x 0 z + J x0 y
(
)
Momento Polar: (respecto al origen) J 0 = m ⋅ x 2 + y 2 + z 2 = J x 0 y + J x 0 z + J y 0 z
También se verifican las siguientes igualdades:
J 0 = J x + J y 0 z = J y + J x0 z = J z + J x0 y
J0 =
y
Jx + Jy + Jz
2
Si se trata de un sistema de puntos materiales habría que hacer la sumatoria de los
productos de las masas, por los cuadrados de las distancias:
(
n
n
J x = ∑1 mi ⋅ d x2 i = ∑1 mi ⋅ yi2 + zi2
)
Y si el sistema de puntos materiales forma un sólido continuo, llamando ρ a la
densidad específica de la masa de cada punto:
(
)
J x = ∫∫∫ ρ ⋅ y 2 + z 2 ⋅ dx ⋅ dy ⋅ dz
Si el cuerpo es de densidad homogénea ρ puede sacarse fuera del signo integral.
Todos los momentos de inercia son expresiones esencialmente positivas.
PRODUCTOS DE INERCIA O MOMENTOS CENTRÍFUGOS
Son el producto de la masa de un punto material por las distancias a dos planos:
J xy = m ⋅ x ⋅ y
Si es un sistema de puntos materiales: J xy = ∑1 mi ⋅ xi ⋅ yi
n
Y si se trata de un sólido continuo: J xy = ∫ x ⋅ y ⋅ dm
Los productos de inercia pueden ser positivos, negativos o nulos.
Digitalización y compaginación: José.L.Sidoti
Página 49 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
TEOREMA DE STEINER
El momento de inercia de un cuerpo respecto a un eje cualquiera, es igual al
momento de inercia respecto a un eje paralelo que pasa por su centro de gravedad,
mas el producto de la masa total del cuerpo por el cuadrado de la distancia entre los
ejes.
μ 0 pasa por G
μ1 es // a μ 0
2
º
n
J μ = ∑1 mi ⋅ ⎡(Pi − 01 ) ∧ μ ⎤ es el momento de inercia respecto a μ1
⎢⎣
⎥⎦
1
(Pi − 01 ) = (Pi − 0) + (0 − 01 ) , sustituyendo en la anterior:
2
º
º
n
J μ = ∑1 mi ⋅ ⎡(Pi − 0 ) ∧ μ + (0 − 01 ) ∧ μ ⎤ , desarrollando:
⎢⎣
⎥⎦
1
2
2
º
º
n
n
J μ = ∑1 mi ⋅ ⎡(Pi − 0) ∧ μ ⎤ + ∑1 mi ⋅ ⎡(0 − 01 ) ∧ μ ⎤ +
⎢⎣
⎢⎣
⎥⎦
⎥⎦
1
º
º ⎫
n
⎧
+ 2 ⋅ ∑1 mi ⋅⎨⎡(Pi − 0 ) ∧ μ ⎤ × ⎡(0 − 01 ) ∧ μ ⎤ ⎬
⎥⎦ ⎢⎣
⎥⎦ ⎭
⎩⎢⎣
El primer sumando del segundo miembro es J μ
0
El segundo sumando podemos escribirlo como M ⋅ d μ2 μ producto de masa total por
0 1
el cuadrado de la
distancia entre los ejes, y el tercer término puede escribirse:
º
º
n
2 ⋅ ⎡(0 − 01 ) ∧ μ ⎤ × ⎡∑1 mi ⋅(Pi − 0 ) ∧ μ ⎤ = 0
⎢⎣
⎥⎦ ⎢⎣
⎥⎦
Porque:
∑1 mi (Pi − 0) = M (G − 0) y (G − 0) // μ
n
º
Digitalización y compaginación: José.L.Sidoti
Página 50 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Luego: J μ = J μ + M ⋅ d μ2 μ
1
0
0 1
La regla que establece el teorema de Steiner es aplicable también a los momentos de
inercia planares, polares, y centrífugos o productos de inercia.
ROTACIÓN DE EJES
Sea un cuerpo referido a una terna de ejes x; y; z y un eje μ cuya orientación
respecto a la terna está dada por sus cosenos directores α ; β ; γ .
Se pretende determinar el momento de inercia del cuerpo dado respecto al eje μ :
º
n
n
J μ = ∑1 mi ⋅ ri2 = ∑1 mi ⋅ ⎡(Pi − 0 ) ∧ μ ⎤
⎢⎣
⎥⎦
2
(1)
º
μ = α ⋅i + β ⋅ j + γ ⋅ k
(Pi − 0) = α ⋅ i + β ⋅ j + γ ⋅ k
i
(Pi − 0) ∧ μ = xi
j
yi
k
zi = ( yi ⋅ γ − zi ⋅ β ) ⋅ i + ( zi ⋅ α − xi ⋅ γ ) ⋅ j + ( xi ⋅ β − yi ⋅ α ) ⋅ k
α
β
γ
º
[(P ) ∧ μ ] = y ⋅ γ
º 2
i
2
i
2
+ z i2 ⋅ β 2 − 2 ⋅ yi ⋅ γ ⋅ z i ⋅ β + z i2 ⋅ α 2 + xi2 ⋅ γ 2 − 2 z i ⋅ α ⋅ xi ⋅ γ +
+ xi2 ⋅ β 2 + yi2 ⋅ α 2 − 2 xi ⋅ β ⋅ yi ⋅ α
Digitalización y compaginación: José.L.Sidoti
Página 51 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
(
)
(
)
(
)
= α 2 ⋅ yi2 + z i2 + β 2 ⋅ xi2 + zi2 + γ 2 ⋅ xi2 + yi2 − 2 ⋅ α ⋅ β ⋅ xi ⋅ yi − 2 ⋅ α ⋅ γ ⋅ xi ⋅ z i − 2 ⋅ β ⋅ γ ⋅ yi ⋅ z i
Reemplazando en (1):
J μ = α 2 ⋅ J x + β 2 ⋅ J y + γ 2 ⋅ J z − 2 ⋅ α ⋅ β ⋅ J xy − 2 ⋅ α ⋅ γ ⋅ J xz − 2 ⋅ β ⋅ γ ⋅ J yz
Expresión que permite calcular el momento de inercia respecto a un eje que forma un
ángulo cualquiera con los ejes
coordenados, cuando se conocen los momentos
de inercia y los momentos centrífugos respecto a estos.
Elipsoide de inercia
Si al eje “ μ ” pasante por “ 0 ” se le dan diferentes direcciones y se marcan sobre
1
ellas segmentos tales corno el OE cuyo módulo vale E − 0 =
, el conjunto de
Jμ
puntos tales como el “ E ” determinarán una superficie cuya: ecuación pretendemos
establecer.
Si (E − 0 ) = x ⋅ i + y ⋅ j + z ⋅ k
Es x = E − 0 ⋅ α ; y = E − 0 ⋅ β ; z = E − 0 ⋅ γ
O bien: x = α
Jμ
; y= β
Jμ
; z= γ
Jμ
De donde:
α = J μ ⋅ x; β = J μ ⋅ y; γ = J μ ⋅ z
Elevando al cuadrado:
α 2 = J μ ⋅ x2; β 2 = J μ ⋅ y2; γ 2 = J μ ⋅ z2
Valores que reemplazados en la ecuación del punto anterior, que nos da “ J μ ” se
tiene:
Digitalización y compaginación: José.L.Sidoti
Página 52 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
J μ = J μ ⋅ J x ⋅ x 2 + J μ ⋅ J y ⋅ y 2 + J μ ⋅ J z ⋅ z 2 − 2 ⋅ J μ ⋅ J xy ⋅ x ⋅ y − 2 ⋅ J μ ⋅ J xz ⋅ x ⋅ z − 2 ⋅ J μ ⋅ J yz ⋅ y ⋅ z
Y dividiendo ambos miembros por “ J μ ” tenemos:
J x ⋅ x 2 + J y ⋅ y 2 + J z ⋅ z 2 − 2 ⋅ J xy ⋅ x ⋅ y − 2 ⋅ J xz ⋅ x ⋅ z − 2 ⋅ J yz ⋅ y ⋅ z = 1
Ecuación que nos da la ley de variación de las coordenadas (x; y; z ) de puntos tales
como E cuando se varía la dirección del eje “ μ ”. La obtenida es la ecuación de un
elipsoide, que se denomina elipsoide de inercia o de Poinsot.
Conocido el elipsoide de inercia relativo al punto “0”, se obtiene el momento de
inercia respecto a un eje que pasa por “0” como el cuadrado de la inversa del radio
del elipsoide correspondiente a dicho eje.
Jμ = 1
(E − 0)2
Si la ecuación del elipsoide se refiere a una terna que coincide con los ejes del
mismo, aquella se transforma en:
J x0 ⋅ x2 + J y0 ⋅ y2 + J z0 ⋅ z 2 = 1
Se anulan los momentos centrífugos y los ejes x0 ; y0 ; z 0 se denominan ejes
principales de inercia en el punto “ 0 ”.
El elipsoide posee por lo menos tres planos ortogonales de simetría, que reciben el
nombre de planos principales de inercia, la intersección de dichos planos dan los tres
ejes principales de inercia.
Digitalización y compaginación: José.L.Sidoti
Página 53 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Si el elipsoide está referido al baricentro se denomina ELIPSOIDE CENTRADO DE
INERCIA y es el mayor de todos los elipsoides que se pueden trazar del cuerpo;
J X G ; J Y G ; J Z G son mínimos.
Si J X 0 = J Y 0 = J Z 0 el elipsoide se transforma en una esfera, y si J X 0 = J Y 0 ≠ J Z 0 el
elipsoide es de revolución alrededor del eje z 0 .
CONDICIONES DE SIMETRÍA
1) Si un cuerpo tiene un plano de simetría, todo eje perpendicular a ese plano es
principal de inercia en el punto de intersección.
Para todo punto como el P1 ( x1 ; y1 ; z1 ) habrá otro punto P2 (x2 ; y 2 ; z 2 ) tal que
x1 = x2 ; y1 = y 2 ; z1 = − z 2
n
verificándose
que
∑m ⋅ x ⋅ z
i
i
i
= 0 = JXZ
y
1
n
∑m ⋅ y
i
i
⋅ zi = 0 = J Y Z
1
Los otros ejes principales de inercia están en el plano de simetría y pueden
obtenerse por medio del círculo de Mohr por ejemplo.
2) Si un eje es principal de inercia en dos de sus puntos, lo es para todos sus
puntos y debe ser baricéntrico.
z es eje principal de inercia en 0 y en 01 ; luego se verifica:
Reemplazando estos valores en 01 se tendrá:
3) Si el sistema tiene dos planos de simetría ortogonales, su intersección es eje
principal de inercia y será baricéntrico.
α y β son planos de simetría y perpendiculares entre si.
En “ 0 ” se tiene que “ y ” es perpendicular a β y “ z ” es perpendicular a α , por
lo tanto “ y ” y “ z ” son ejes principales de inercia; “ x ” es perpendicular a “ y ” y
a “ z ” luego también es principal de inercia.
Digitalización y compaginación: José.L.Sidoti
Página 54 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Lo mismo puede decirse en “ 01 ” resultando nuevamente “ x ” principal de
inercia; en consecuencia por la condición (2) “ x ” es baricéntrico.
4) Si un sistema admite tres planos ortogonales de simetría, sus intersecciones
son los ejes principales de inercia.
5) Todo eje de simetría es eje principal de inercia.
6) Si se trazan los elipsoides correspondientes a diferentes puntos de un eje de
simetría, este eje principal es común a todos y los otros resultan paralelos.
7) Si un cuerpo es de revolución alrededor de un eje, este es principal ole inercia
en todos sus puntos, ya que es un eje de simetría.
8) Para las placas, láminas, discos de espesor constante, cualquier eje normal es
principal de inercia en su intersección.
9) El elipsoide central de inercia de un prisma recto, cuya base es un polígono
regular, es de revolución alrededor del eje del prisma. Es el caso de todos
prismas regulares homogéneos.
10) Para todos los poliedros regulares el elipsoide central de inercia es una esfera.
11) Los sólidos de revolución (cilindro; cono; etc.) tienen sus elipsoides centrales
de revolución.
12) Tres casos importantes para la Mecánica Técnica:
a. Sólido que rota alrededor de un eje perpendicular a un plano de
simetría del mismo.
El eje de rotación es principal de inercia en el punto intersección con
el plano de simetría.
b. Cuerpo con plano de simetría paralelo al eje de rotación.
El eje de rotación es principal de inercia en el punto donde el plano
perpendicular al plano de simetría que pasa por “ 0 ” corta al eje.
Digitalización y compaginación: José.L.Sidoti
Página 55 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
A cada punto “ A ” del cuerpo corresponde otro “ B ” simétrico en que
z A es constante. En el plano z = z A se verifica que:
n
n
1
1
J XZ A = ∑ mi A ⋅ xi A ⋅ z A = z A ⋅ ∑ mi A ⋅ xi A = M A ⋅ xG ⋅ z A
Y extendiéndolo a todo el cuerpo:
n
n
1
1
J XZ = ∑ M i ⋅ xG ⋅ zi = xG ⋅ ∑ M i ⋅ zi
n
Pero como
∑M
i
⋅ zi = 0 (Momento estático respecto a plano
1
baricéntrico) nos queda J XZ = 0 . Si se toma el plano zy se puede
hacer un razonamiento similar, obteniéndose en este caso
J YZ = 0 ; luego z es principal de inercia en 0 .
Se observa que el plano xy perpendicular al plano de simetría, no es
un plano cualquiera que cumpla esa condición, es un plano principal
de inercia en G (ver pág. 53 del presente capítulo); el eje en
consecuencia es paralelo a uno principal de inercia en G .
Digitalización y compaginación: José.L.Sidoti
Página 56 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Luego la proposición correcta sería: “Todo eje paralelo a un eje
principal de inercia baricéntrico, es principal de inercia en el punto en
que corta al plano formado por los otros dos ejes principales de inercia
baricéntricos”.
c. Si el eje z es eje de simetría, es principal de inercia en todos sus
puntos.
RADIO DE INERCIA O RADIO DE GIRO
En la distancia “ i ” al eje de referencia de un punto material en el que no puede
imaginar concentrada la masa del cuerpo para poder obtener el mismo momento de
inercia J , de esto:
J Z = N ⋅ i z2 , luego i z =
JZ
N
MASA REDUCIDA
En ocasiones es de interés sustituir una masa de momento de inercia dado, por un
punto material de masa N r , distante a la distancia “ r ” del eje de giro.
Así, por ejemplo, se reduce la masa del volante al radio de la manivela; la masa de
un tambor a su periferia.¨
J = Mr ⋅r2
Donde M r es la masa reducida a la distancia r
M =J
r2
Si se reduce la masa de momento de inercia J a la distancia 1 (uno) se tiene:
J = M 1 ⋅ 12 = M 1
Digitalización y compaginación: José.L.Sidoti
Página 57 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
El momento de inercia del cuerpo tiene el mismo valor numérico que la masa
reducida a la distancia unitaria.
FACTOR DE INERCIA
En la práctica cuando se acoplan diversos elementos rotantes (motores eléctricos;
volantes, acoplamientos, etc.) se suele utilizar en lugar de los momentos de inercia
con respecto al eje de giro, el denominado “Momento Regulador”; “Momento de
Impulsión” (Hütto); “Factor de Inercia” (Dubbel); o simplemente “ PD 2 ” o “ GD 2 ”,
producto del peso del cuerpo rotante por el cuadrado de su diámetro de giro ( 2i ), su
dimensión en Kg ⋅ m 2 .
Este valor se relaciona con el momento de inercia de la siguiente forma:
[
]
GD 2 = M ⋅ g ⋅ (2i ) = 4 ⋅ g ⋅ M ⋅ i 2 = 4 ⋅ g ⋅ J = 4 ⋅ 9,8 ⋅ J = 39,2 ⋅ J
2
A manera da ejemplo de aplicación en la técnica, se observa como con otros datos
característicos, se dan en la tabla siguiente el valor de GD 2 para el acoplamiento
elástico Tecno-Poriflex.
Digitalización y compaginación: José.L.Sidoti
Página 58 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Digitalización y compaginación: José.L.Sidoti
Página 59 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
BOLILLA N ° 8
DINÁMICA SISTEMAS
•
•
•
•
•
•
•
TRABAJO; ENERGÍA CINÉTICA; TEOREMA DE KÖNIG; ENERGÍA
CINÉTICA DE UN SÓLIDO; CANTIDAD DE MOVIMIENTO DE UN
SÓLIDO.
MOMENTO DE LA CANTIDAD DE MOVIMIENTO CON RESPECTO
AL VARICENTRO; VARIACIÓN DEL MOMENTO CINÉTICO.
VARIACIÓN DE Q Y K REFERIDAS A TERNAS NO INERCIALES EN
ROTACIÓN. TEOREMA DE LAS FUERZAS VIVAS.
ECUACIONES DINÁMICAS DE EULER.
ROTACIÓN DE UN SÓLIDO ALREDEDOR DE UN EJE FIJO;
REACCIONES EN LOS COJINETES. EQUILIBRADO DINÁMICO.
MOVIMIENTO DE UN SÓLIDO ALREDEDOR DE UN PUNTO FIJO;
GIROSCOPO; PRECESIÓN FIJAS DISTINTA DE 90°.
MASA VARIABLE; COHETE DE UNA Y VARIAS ETAPAS.
TEMAS AGREGADOS
•
•
DINÁMICA DEL MOVIMIENTO POLAR; MOVIMIENTO POR
INERCIA.
DESCRIPCIÓN DE POINSSOT DEL MOVIMIENTO POR INERCIA.
Digitalización y compaginación: José.L.Sidoti
Página 60 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
DINÁMICA DE LOS SISTEMAS
Debemos distinguir aquí los sistemas de partículas (*) y el sólido rígido ya definido
en Cinemática.
Adecuaremos en primer término las fórmulas obtenidas en Dinámica del Punto a
estos sistemas.
TRABAJO ELEMENTAL
Sistema de partículas: Sea un sistema de partículas siendo Pi una cualquiera de ellas
y F i la resultante de las fuerzas aplicadas a la misma (interiores y exteriores).
n
dΤ = ∑ F i × d P i
1
d Pi
⋅ dt = V i ⋅ dt
dt
d Pi =
n
∴ dΤ = ∑ F i × V i ⋅ dt
1
La expresión tiene el carácter relativo porque depende del sistema de referencia
adoptado.
Sólido: La velocidad de un punto genérico del sólido es:
V i = V 01 + ω ∧ (Pi − 01 )
Reemplazando en la expresión del trabajo elemental se tiene:
n
dΤ = ∑ F i × V i ⋅ dt =
1
n
n
1
1
[
]
= ∑ F i × V 01 ⋅ dt + ∑ F i × ω ∧ (Pi − 01 ) ⋅ dt
n
n
1
1
dΤ = V 01 ⋅ dt × ∑ F i + ω ⋅ dt × ∑ F i ∧ (01 − Pi )
(
)
dΤ = V 01 × R + ω × M ⋅ dt
Digitalización y compaginación: José.L.Sidoti
Página 61 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
ENERGÍA CINÉTICA
Sistema de partículas
La expresión de la Energía Cinética es:
Ec =
( )
1 n
⋅ ∑ mi ⋅ V i
2 i =1
2
=
1 n
⋅ ∑ mi ⋅V i × V i
2 i =1
Donde: V i = V 01 + V i (r )
2
2
Operando: V i × V i = V 01 + 2 ⋅V 01 × V i r + V i r
n
2
1 2 n
1 n
Ec = ⋅V 01 ⋅ ∑ mi +V 01 × ∑ mi ⋅V i r + ⋅ ∑ mi ⋅V i r
2
2 1
1
1
n
n
2
2
1
1
= ⋅ M ⋅ V 01 + V 01 × ∑ mi ⋅ V i r + ⋅ ∑ mi ⋅V i r
2
2 1
1
n
Donde: V 01 × ∑ mi ⋅V i r es la FUERZA VIVA CONCURRENTE.
1
(*) Sistema de partículas: es un conjunto de partículas donde la posición o el movimiento de cada una
depende de la posición y el movimiento de las demás, ejemplo el Sistema Solar. Una mera
“colección” de partículas no vinculadas por fuerzas de interacción como una bandada de gorriones,
por ejemplo, no constituye un sistema.
TEOREMA DE KÖNIG
La energía cinética de un sistema material cualquiera, es en cada instante igual a la
energía cinética que corresponde al baricentro, supuesto en este concentrada toda la
masa, más la energía cinética correspondiente al sistema en su movimiento relativo al
baricentro.
El centro de masa se obtiene:
n
(G − 01 ) =
∑ mi ⋅ (Pi − 01 )
1
n
∑m
n
=
∑ m ⋅ (P − 0 )
i
i
1
1
M
i
1
Si se hace coincidir 01 ≡ G
Digitalización y compaginación: José.L.Sidoti
Página 62 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
n
∑ m ⋅ (P − G ) = 0 (Momento estático respecto al baricentro)
i
i
1
Derivando respecto al tiempo:
n
∑ mi ⋅
1
d (Pi − G ) n
= ∑ mi ⋅V i rG = 0
dt
1
Reemplazando en la expresión que nos daba la energía cinética, donde ahora 01 ≡ G :
Ec =
2
2
1
1 n
⋅ M ⋅ V G + ⋅ ∑ mi ⋅V i rG
2
2 1
Sólido
Siendo V i = V 01 + ω ∧ (Pi − 01 )
[
]
[
]
Es V i = V 01 + ω ∧ (Pi − 01 ) = V 01 + 2 ⋅ V 01 × ω ∧ (Pi − 01 ) + ω ∧ (Pi − 01 )
2
Reemplazando: Ec =
2
[
]
[
2
]
n
2
2
1 n
1
⋅ M ⋅ V 01 + V 01 × ∑ mi ⋅ ω ∧ (Pi − 01 ) + ⋅ ∑ mi ⋅ ω ∧ (Pi − 01 )
2 1
2
1
n
Dado que: (G − 01 ) =
∑ m ⋅ (P − 0 )
i
i
1
1
M
n
∴ ∑ mi ⋅ (Pi − 01 ) = M ⋅ (G − 01 )
1
El segundo sumando vale:
[
n
]
V 01 ∧ ω × ∑ mi ⋅ (Pi − 01 ) = V 01 ∧ ω × M ⋅ (G − 01 ) = M V 01 ; ω ; (G − 01 )
1
o
Y teniendo en cuenta que ω = ω ⋅ ω el tercer sumando se puede escribir:
n
2
2
o
1
1 n
1
⋅ ∑ mi ⋅ ω ∧ (Pi − 01 ) = ⋅ ω 2 ⋅ ∑ mi ⋅ ω ∧ (Pi − 01 ) = ⋅ ω 2 ⋅ J ω
2
2 1
2
1
[
]
[
]
Ya que ω ∧ (Pi − 01 ) es la diferencia del punto al eje.
o
Luego:
Digitalización y compaginación: José.L.Sidoti
Página 63 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
[
]
2
1
1
Ec = ⋅ M ⋅V 01 + ⋅ J ω ⋅ ω 2 + M ⋅ V 01 ;ω ; (G − 01 )
2
2
2
1
1
Si 01 ≡ G , (G − 01 ) = 0 ∴ Ec = ⋅ M ⋅V 01 + ⋅ J ω ⋅ ω 2
2
2
Si el sólido tiene un punto fijo, tomando a este como centro de reducción V 01 = 0 .
(
Ec =
)
1
⋅ Jω ⋅ ω 2
2
1
= ⋅ ω x2 ⋅ J x + ω y2 ⋅ J y + ω z2 ⋅ J z − 2 ⋅ ω x ⋅ ω y ⋅ J xy − 2 ⋅ ω x ⋅ ω z ⋅ J xz − 2 ⋅ ω y ⋅ ω z ⋅ J yz
2
Si los ejes coinciden con los principales de inercia del sólido en el punto 01
[
1
Ec = ⋅ ω x2 ⋅ J x + ω y2 ⋅ J y + ω z2 ⋅ J z
2
]
CANTIDAD DE MOVIMIENTO
Sistema de partículas:
n
Q = ∑ mi ⋅V i , donde: V i = V 01 + V i r remplazando:
1
Si 01 es fijo V 01 = 0 como V i r =
d (Pi − 01 )
es
dt
n
∑ mi ⋅V i r =
1
d n
⋅ ∑ mi ⋅ (Pi − 01 ) pero
dt 1
n
como
∑ m ⋅ (P − 0 ) = M ⋅ (G − 0 )
i
i
1
1
1
d
d
⋅ M ⋅ (G − 01 ) = M ⋅ ⋅ (G − 01 ) = M ⋅V 01
dt
dt
d (G − 01 )
es la velocidad de G relativa a 01
Si 01 no es fijo
dt
Resulta Q =
Digitalización y compaginación: José.L.Sidoti
Página 64 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Q = M ⋅ V 01 + M ⋅V G r = M ⋅V G , donde V G es la velocidad absoluta de G .
Lo que nos dice que la CANTIDAD DE MOVIMIENTO de un sistema material
cualquiera, es en cada instante igual al que correspondería al baricentro del sistema,
considerado este como un punto material en el que se encontrara concentrada toda la
masa del mismo.
Sólido:
Siendo V i = V 01 + ω ∧ (Pi − 01 ) es
n
n
n
n
n
1
1
1
1
1
Q = ∑ mi ⋅V i = ∑ mi ⋅ V 01 + ∑ mi ⋅ ω ∧ (Pi − 01 ) = V 01 ⋅ ∑ mi + ω ∧ ∑ mi ⋅ (Pi − 01 ) =
[
]
Q = M ⋅V 01 + ω ∧ (G − 01 ) = M ⋅ V 01 + ω ∧ (G − 01 )
Ecuación que puede escribirse en proyecciones teniendo en cuenta que:
V 01 = V 01 x ⋅ i + V 01 y ⋅ j + V 01 z ⋅ k
ω = ω x ⋅i +ω y ⋅ j + ω z ⋅ k
(G − 01 ) = x1G ⋅ i + y1G ⋅ j + z1G ⋅ k
⎧Qx = M ⋅ [V01 x + z1G ⋅ ω y − y1G ⋅ ω z ]
⎪
⎨Q y = M ⋅ V01 y + x1G ⋅ ω z − z1G ⋅ ω x
⎪Q = M ⋅ [V + y ⋅ ω − x ⋅ ω ]
01 z
1G
x
1G
y
⎩ z
[
]
MOMENTO DE LA CANTIDAD DE MOVIMIENTO
Sistema de partículas
n
n
n
1
1
1
K 01 = ∑ mi ⋅ V i ∧ (01 − Pi ) = ∑ mi ⋅ V 01 ∧ (01 − Pi ) + ∑ mi ⋅ V i r ∧ (01 − Pi ) =
Digitalización y compaginación: José.L.Sidoti
Página 65 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
n
n
1
1
n
= V 01 ∧ ∑ mi ⋅ (01 − Pi ) + ∑ mi ⋅V i r ∧ (01 − Pi ) = V 01 ∧ M ⋅ (01 − G ) + ∑ mi ⋅V i r ∧ (01 − Pi )
1
n
K 01 = V 01 ∧ M ⋅ (01 − G ) + ∑ mi ⋅V i r ∧ (01 − Pi )
1
Este es el momento cinético absoluto respecto al punto 01 que vemos está compuesto
de dos términos, el primero debido al movimiento de arrastre (translación de la terna
móvil), M ⋅ V 01 ∧ (01 − G ) como si toda la masa estuviese concentrada en G y
moviéndose con la velocidad de arrastre, y el segundo correspondiente a la suma de
los momentos cinéticos de cada partícula correspondientes a las velocidades relativas
a la terna móvil, es el momento cinético relativo.
MOMENTO CINÉTICO RESPECTO AL BARICENTRO
Si hacemos coincidir el origen de la terna móvil con G ;
(01 − G )
la ecuación
n
anterior se transforma en: K G ab = V G ∧ M ⋅ (G − G ) + ∑ mi ⋅ V i r G ∧ (G − Pi )
1
El primer término es nulo y el segundo es el momento cinético relativo a G .
∴ K G ab = K G r
Que nos dice que en un sistema material cualquiera el momento de las cantidades de
movimiento absolutas es igual al momento de las cantidades de movimiento
relativos, tomadas ambas respecto al baricentro. La terna relativa está en translación
respecto a la inercial.
Sólido
La velocidad de un punto cualquiera del sólido es: V i = V 0 i + ω ∧ (Pi − 01 ) donde V 01
es la velocidad de translación del origen de la terna móvil, punto que si lo hacemos
coincidir con G , podemos aplicar la propiedad ya estudiada K G ab = K G rel . , donde
aquí K G r es el momento cinético correspondiente al movimiento de rotación del
sólido alrededor de un eje que pasa por G .
n
[
]
En ese caso: V i = ω ∧ (Pi − 01 ) y K G = ∑ mi ⋅ ω ∧ (Pi − G ) ∧ (G − Pi )
1
n
[
]
K G = ∑ mi ⋅ (Pi − G ) ∧ ω ∧ (Pi − G ) , donde:
1
(Pi − G ) ∧ [ω ∧ (Pi − G )] = ω ⋅ ( Pi − G )2 − (Pi − G ) ⋅ [ω × (Pi − G )]
Siendo las componentes de
Digitalización y compaginación: José.L.Sidoti
Página 66 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
(
(
(
⎧ω x x 2 + y 2 + z 2
⎧ xi
⎧ω x
(Pi − G )⎪⎨ yi , y de ω ⎪⎨ω y resulta: ω ⋅ (Pi − G )2 ⎪⎨ω y x 2 + y 2 + z 2
⎪ω x 2 + y 2 + z 2
⎪z
⎪ω
⎩ i
⎩ z
⎩ z
)
)
)
⎧ − ω x ⋅ x 2 − ω y ⋅ xy − ω z ⋅ xz
⎧ω x ⋅ xi
⎪
⎪
ω × (Pi − G )⎨ω y ⋅ yi , y − (Pi − G ) ⋅ ω × (Pi − G ) ⎨− ω y ⋅ y 2 − ω x ⋅ xy − ω z ⋅ yz
⎪ω ⋅ z
⎪ − ω ⋅ z 2 − ω ⋅ xz − ω ⋅ yz
x
y
⎩ z i
⎩ z
[
]
Resulta:
K
G
=
∑ m {[ω (x
n
i
2
x
+ y 2 + z 2 ) − ω x ⋅ x 2 − ω y ⋅ xy − ω z ⋅ xz ] ⋅ i 1 + ...
}
1
Y sus componentes según los ejes:
n
(
)
n
n
1
1
K G = ω x ∑ mi y 2 + z 2 − ω y ∑ mi ⋅ xy − ω z ∑ mi ⋅ xz
1
K G x = ω x ⋅ J x − ω y ⋅ J xy − ω z ⋅ J xz , de igual manera
K G y = ω y ⋅ J y − ω x ⋅ J xy − ω z ⋅ J yz
K G z = ω z ⋅ J z − ω x ⋅ J xz − ω y ⋅ J yz
Que también se verifican cuando 01 ≠ G para V 01 = 0
VARIACIÓN DE DRALL (Derivada del momento de la cantidad de movimiento)
n
La expresión de Drall es: K 01 = ∑ mi ⋅ V i ∧ (01 − Pi )
1
Derivando respecto al tiempo:
n
n
d (01 − Pi )
d K 01
dV i
= ∑ mi ⋅
∧ (01 − Pi ) + ∑ mi ⋅V i ∧
dt
dt
dt
1
1
n
d (01 − Pi ) d 01 dPi
Teniendo en cuenta que:
=
−
= V 01 − V i ; ∑ mi ⋅V i // V i
dt
dt
dt
1
Resulta:
n
d K 01
= ∑ mi ⋅ a i ∧ (01 − Pi ) + Q ∧ V 01 = K 01 + Q ∧ V 01
dt
1
d K 01
= M 01
dt
Si 01 no es fijo pero coincide con G :
Si 01 es fijo V 01 = 0 luego
Q = M ⋅V G ∴ Q ∧ V G = 0
n
dKG
= ∑ mi ⋅ ai ∧ (G − Pi )
dt
1
Digitalización y compaginación: José.L.Sidoti
Página 67 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Variación de Q y K cuando están referidas a ternas no inerciales en rotación
Se estableció en Dinámica del Punto que la derivada de la cantidad do movimiento
Q respecto al tiempo, daba como resultado la resultante de las fuerzas exteriores y la
derivada del momento cinético K 01 , el momento de dichas fuerzas exteriores.
dQ
= Re
dt
d K 01
= M 01
dt
;
Los vectores Q y K 01 dependen de las condiciones de movimiento y de las
características del móvil, siendo independientes del sistema de referencia elegido.
Comúnmente se adopta un sistema de referencia solidario con el móvil, como se vio
en el capítulo de Cinemática del Rígido; los vectores Q y K 01 podrán variar
respecto a este sistema móvil y a su vez serán arrastrados por el movimiento de la
terna respecto a una fija o a una galileana.
La derivada absoluta de Q y K 01 , que necesitamos para calcular R e y M 01 debemos determinarla como se hizo en el capítulo de Movimiento Relativo
dQ ⎡dQ ⎤
=⎢
⎥ +ω ∧Q
dt ⎣ dt ⎦1
;
d K 01 ⎡ d K 01 ⎤
=⎢
⎥ + ω ∧ K 01
dt
⎣ dt ⎦ 1
Donde los primeros términos; del segundo miembro son las derivadas relativas a la
terna móvil y loa segundos términos representan la variación debida a la velocidad
angular de arrastro de dicha terna.
Teniendo en cuenta la derivada del momento de la cantidad de movimiento
(Variación del Drall)
d K 01
d K 01
= M 01 + Q ∧ V 01 ∴ M 01 =
+ V 01 ∧ Q
dt
dt
d K 01
en función de la derivada relativa como se hizo con la cantidad
dt
d K 01 ⎡ d K 01 ⎤
=⎢
de movimiento:
⎥ + ω ∧ K 01
dt
dt
⎣
⎦1
Expresando la
⎡ d K 01 ⎤
Resulta: M 01 = ⎢
⎥ + ω ∧ K 01 + V 01 ∧ Q
⎣ dt ⎦1
TEOREMA DE LAS FUERZAS VIVAS
Con una demostración igual a la realizada en dinámica del punto pero extendida ahora a todas las partículas del sistema material o a todos los puntos del sólido rígido
se tiene:
Digitalización y compaginación: José.L.Sidoti
Página 68 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
⎛ n
⎞
⎜ ∑ mi ⋅ Vi 2 ⎟
n
∑1 F i × d P i = d ⎜⎜ 1 2 ⎟⎟
⎜
⎟
⎝
⎠
dΤ = dEc
Que establece igual que antes que: La suma de los trabajos elementales de las fuerzas
que actúan en un sistema material es igual a la variación elemental de energía
cinética.
ECUACIONES DINÁMICAS DE EULER
La expresión del momento de las fuerzas exteriores que actúan sobre un sólido referido a ternas no inerciales en rotación es:
⎛ d K 01 ⎞
⎟ + ω ∧ K 01 + V 01 ∧ Q
M 01 = ⎜⎜
⎟
⎝ dt ⎠ r
Si se toma: 01 FIJO O MÓVIL COINCIDENTE CON G , 01 ≡ G (Véase cantidad
de movimiento de un sólido P.3) Y LOS EJES DE REFERENCIA COINCIDENTES
CON LOS PRINCIPIOS DE INERCIA EN 01
⎛ d K 01 ⎞
⎟ + ω ∧ K 01
M e = ⎜⎜
⎟
⎝ dt ⎠1
ω = ω x ⋅ i1 + ω y ⋅ j 1 + ω z ⋅ k 1
K 01 = ω x ⋅ J x ⋅ i 1 + ω y ⋅ J y ⋅ j 1 + ω z ⋅ J z ⋅ k 1
dω y
⎛ d K 01 ⎞ dω x
dω z
⎜
⎟ =
J
i
⋅
⋅
⋅
J
⋅
j
+
⋅ J z ⋅ k1
1 +
x
y
1
⎜ dt ⎟
dt
dt
dt
⎝
⎠1
ω ∧ K 01 =
i1
j1
k1
ωx
ωy
ωz
=
ωx ⋅ J x ω y ⋅ J y ωz ⋅ J z
= (ω yω z J z − ω y ω z J y )⋅ i1 + (ω xω z J x − ω xω z J z ) ⋅ j 1 + (ω xω y J y − ω xω y J x )⋅ k 1
= ω yω z (J z − J y )⋅ i1 + ω xω z ( J x − J z ) ⋅ j 1 + ω xω y (J y − J x )⋅ k 1
Que nos dan como componentes del momento de las fuerzas exteriores sobre los ejes
Mex =
dω x
⋅ J x + ω zω y (J z − J y )
dt
Digitalización y compaginación: José.L.Sidoti
Página 69 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Mez
dω y
⋅ J y + ω xω z ( J x − J z )
dt
dω z
=
⋅ J z + ω yω x (J y − J x )
dt
Mey =
Expresiones conocidas como Ecuaciones Dinámicas de Euler.
ROTACIÓN DE UN SÓLIDO ALREDEDOR DE UN EJE FIJO REACCIONES DINÁMICAS
La ecuaciones ores de la dinámica nos permiten determinar la resultante de las
fuerzas exteriores R e y el momento de dichas fuerzas respecto a un punto cualquiera
M 01 (normalmente se toma el origen de coordenadas) que actúan sobre el sólido en
movimiento; dichas acciones se aplican evidentemente a través de los cojinetes que
sustentan al eje, por lo cual el conocimiento de R e y M 01 nos permite calcular las
reacciones dinámicas de los mismos.
El hecho de que R e resulte igual a cero, no implica que el momento M 01 sea
también cero (la resultante de una supla es cero), es necesario en consecuencia el
cálculo de los dos parámetros.
Supongamos un sólido como el de la figura, referido a la terna móvil 0; x; y; z y
tomemos como eje de rotación el eje Z:
⎧ xG
⎪
G ⎨ yG
⎪z
⎩ G
⎧0
⎪
ω⎨0
⎪ω
⎩
Determinemos primero R e
⎛ dQ ⎞
⎟ +ω ∧Q
R e = ⎜⎜
⎟
⎝ dt ⎠1
Recordando que:
Digitalización y compaginación: José.L.Sidoti
Página 70 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Q = M ⋅V G
;
V G = ω ∧ (G − 01 ) = −ω ⋅ yG ⋅ i + ω ⋅ xG ⋅ j
⎛ dQ ⎞
dω
⎡ dω
⎜
⎟
⎜ dt ⎟ = M ⋅ ⎢⎣− dt ⋅ yG ⋅ i + dt ⋅ xG ⋅
⎝
⎠1
dω
⎞
⎛
+ xG ⋅ ω 2 ⎟
Re x = − M ⋅ ⎜ yG ⋅
dt
⎠
⎝
dω
⎛
⎞
− yG ⋅ ω 2 ⎟
Re y = M ⋅ ⎜ xG ⋅
dt
⎠
⎝
⎤
j⎥
⎦
[
; ω × Q = M ⋅ − ω 2 ⋅ xG ⋅ i − ω 2 ⋅ y G ⋅ j
]
Estas componentes de R e pueden anularse si xG o yG son iguales a cero, es decir, si
G está sobre el eje de rotación.
Analicemos ahora el momento de las fuerzas exteriores:
⎛ d K 01 ⎞
⎟ + ω ∧ K 01
M 01 = ⎜⎜
⎟
dt
⎝
⎠1
Siendo las componentes de:
⎧ K G x = ω x ⋅ J x − ω y ⋅ J xy − ω z ⋅ J xz
⎪
K 01 ⎨ K G y = ω y ⋅ J y − ω x ⋅ J xy − ω z ⋅ J yz
⎪K Gz = ω ⋅ J −ω ⋅ J −ω ⋅ J
z
z
x
xz
y
yz
⎩
Las que se simplifican si se considera que: ω x = ω y = 0; ω z = ω
Quedando:
⎧ K 01 x = −ω ⋅ J xz
⎪
⎨ K 01 y = −ω ⋅ J yz
⎪ K 01 = ω ⋅ J
z
z
⎩
Con lo que: K 01 = − J xz ⋅ ω ⋅ i − J yz ⋅ ω ⋅ j + J z ⋅ ω ⋅ k
Siendo: ω ∧ K 01 = J yz ⋅ ω 2 ⋅ i − J xz ⋅ ω 2 ⋅ j
Resulta para las componentes:
dω
⎧
2
⎪M 01 x = − J xz ⋅ dt + J yz ⋅ ω
⎪⎪
dω
M 01 ⎨M 01 y = − J yz ⋅
− J xz ⋅ ω 2
dt
⎪
dω
⎪
M 01 x = − J z ⋅
⎪⎩
dt
Digitalización y compaginación: José.L.Sidoti
Página 71 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Si G está sobre el eje de rotación y el eje z1 es principal de inercia en
dω
G (J xz = J yz = 0) las reacciones dinámicas sobre los cojinetes son nulas; J z ⋅
es
dt
la cupla motora o de frenado.
EJEMPLO
Sea el ojo de la figura que puede rotar sustentado por los cojinetes A y B , sobre el
que se hallan montadas dos masas M en la forma que se indica.
Se pretende, aplicando las fórmulas de la dinámica, determinar las reacciones en los
cojinetes. Supongamos primeramente que la velocidad de rotación es constante y que
los ejes del sistema de referencia móvil son baricéntricos pero no principales de
inercia. La figura siguiente es la vista en el plano X 1 ;Y1 .
Digitalización y compaginación: José.L.Sidoti
Página 72 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
El momento de las fuerzas exteriores está dado por la expresión:
⎛ d K 01 ⎞
⎟ + ω ∧ K 01 + V 01 ∧ Q
M 01 = ⎜⎜
⎟
dt
⎝
⎠1
La que si se tiene en cuenta que ω = cte y 01 es un punto fijo (está sobre el eje) se
reduce a: M 01 = ω ∧ K 01
Donde: ω = ω × i ; ω y = ω z = 0
⎧ K 01 x = J x ⋅ ω x − J xy ⋅ ω y − J xz ⋅ ω z
⎪
K 01 = K 01 x ⋅ i1 + K 01 y ⋅ j 1 + K 01 z ⋅ k 1 ∴ ⎨ K 01 y = J y ⋅ ω y − J xy ⋅ ω x − J yz ⋅ ω z
⎪ K = J ⋅ω − J ⋅ω − J ⋅ω
z
z
xz
x
yz
y
⎩ 01 z
⎧ K 01 x = J x ⋅ ω x
⎧ω y = ω z = 0
⎪
⎪
Que se reducen a: ⎨ K 01 y = − J xy ⋅ ω x por ser: ⎨
y
⎪
⎪ J =0
K 01 z = 0
xz
⎩
⎩
i1
j1
0
M 01 = ω
J xω − J xyω
J xy = −2 ⋅ M ⋅ r ⋅
k1
0 = − J xy ⋅ ω 2 ⋅ k 1
0
d
= − M ⋅ r ⋅ d (Las masas se consideran puntuales)
2
Luego:
M 01 = M ⋅ r ⋅ d ⋅ ω 2 ⋅ k 1
Digitalización y compaginación: José.L.Sidoti
Página 73 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Si los ejes elegidos además de ser baricéntricos fueran los principales de inercia se
podrían aplicar las fórmulas de Euler.
dω x
⋅ J x + ω z ω y (J z − J y )
dt
dω y
M 01 y =
⋅ J y + ω xω z ( J x − J z )
dt
dω z
M 01 z =
⋅ J z + ω yω x (J y − J x )
dt
M 01 x =
Teniendo en cuenta que ω = cte; ω 2 = 0; J y = 0 la única componente válida es:
M 01 z = −ω yω x J x
Donde:
ω x = ω ⋅ cos ϕ = ω
r
(d 2 )2 + r 2
; ω y = −ω ⋅ senϕ = ω
d
⎞
⎛d2
2
; J x = 2 M ⎜⎜
+ r 2 ⎟⎟
⎠
⎝ 4
(d 2 )2 + r 2
Con lo que: igual al anteriormente encontrado.
Sin aplicar las fórmulas de la dinámica, la fuerza centrífuga de cada masa al rotar es
M ⋅ ω 2 ⋅ r y el momento M ⋅ ω 2 ⋅ r ⋅ d ; este momento tiene el sentido de − k 1 , es el
momento de las fuerzas de inercia del sistema que debe equilibrar al momento de las
fuerzas exteriores (momento de las reacciones).
Luego: M 01 = M ⋅ ω 2 ⋅ r ⋅ d ⋅ k 1 ya encontrada.
Digitalización y compaginación: José.L.Sidoti
Página 74 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Las reacciones se obtienen a partir del momento de las fuerzas exteriores como
sigue:
R A d = RB d
M 01 M ⋅ ω 2 ⋅ r ⋅ d
=
=
l
l
Estas reacciones rotan con el cuerpo con velocidad angular ω .
Si consideramos ahora que ω ≠ cte y teniendo en cuenta que ω Z 1 = 0; J y 1 = 0
aplicando Euler se tiene:
dω x
⋅ J x1
dt
= −ω y ⋅ ω x ⋅ J x1
M 01 x =
M 01 z
Aparece una componente según el eje x1 que se puede descomponer según el eje de
rotación (par motor o de frenado) y sobre un eje perpendicular a este que da nuevas
reacciones sobre los cojinetes, que son perpendiculares a las encontradas en primer
término, que también rotan con el eje.
Digitalización y compaginación: José.L.Sidoti
Página 75 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Las reacciones totales sobre los cojinetes se consiguen sumando geométricamente las
reacciones dinámicas encontradas a las reacciones estáticas debido al peso del eje,
pero teniendo en cuenta que mientras las primeras rotan con el eje, las últimas
permanecen fijas en el espacio.
EQUILIBRADO DINÁMICO
Al igual que en el equilibrio estático, debe verificarse que la sumatoria de las fuerzas
de inercia que actúan sobre el rígido en rotación debe ser igual a cero y que la
sumatoria de los momentos con respecto a un punto cualquiera, do las mismas
fuerzas, debe ser también igual a cero.
Supongamos un eje como el de la figura:
Digitalización y compaginación: José.L.Sidoti
Página 76 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Cuando el eje tiene una rotación ω la fuerza de inercia de cada masa estará dada
ω 2 ⋅ r i ⋅ mi , su dirección será la del radio, dada por ϕ i y su sentido saliente (fuerza
centrífuga).
Para que el sistema esté en equilibrio la suma vectorial de las mismas debe dar un
polígono cerrado. En escala ω 2 se puede escribir:
n
∑r
i
⋅ mi = 0 = M ⋅ r G ∴ r G = 0
1
Que nos dice que el centro de gravedad del sistema debe estar sobre el eje, condición
de equilibrio estático. Si el polígono no es cerrado el lado de cierre nos da la fuerza
equilibrante.
Veamos los momentos; tomemos dos planos arbitrarios perpendiculares al eje en los
cuales sea posible agregar o quitar masas, el π A y el π B y llamemos ai y bi las
distancias de las masas a los respectivos planos.
Si tomamos momentos de las fuerzas de inercia con respecto a los puntos A y
B intersección de los planos elegidos con el eje, se tendrá para la condición de
equilibrio:
n
M A = ∑ mi ⋅ ω 2 ⋅r i ∧ a i = 0
1
n
M B = ∑ mi ⋅ ω 2 ⋅r i ∧ b i = 0
1
Que gráficamente significa que el polígono formado por los vectores momentos en
A y en B debe ser cerrado. Estos vectores son perpendiculares al plano formado por
los r i y a i o b i , pero como los a i y los b i son coincidentes con el eje, podemos
graficarlos en la dirección de r i lo cual nos facilita el trabajo (el polígono de
momentos en la realidad estaría desfasado en π 2 respecto a la figura).
Digitalización y compaginación: José.L.Sidoti
Página 77 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
En la escala ω 2 representamos en la dirección de r i ,
n
∑ mi ⋅ r i ⋅ a i y
1
n
∑m ⋅r
i
i
⋅ bi ;
1
los lados de estos polígonos son evidentemente paralelos a los lados del polígono de
fuerzas trazado; los lados de cierre serán mB ⋅ r B ⋅ a B y m A ⋅ r A ⋅ bA lo que nos permite
determinar mB ⋅ r B y m A ⋅ r A ; fijando r se puede determinar m o a la inversa. Los
ángulos ϕ A y ϕ B se pueden obtener gráficamente o bien en forma analítica si se
hacen proyecciones sobre dos ejes perpendiculares.
Paralelas a los lados de cierre de los polígonos de momentos en el polígono do
fuerzas (como componentes del lado de cierre de este último) nos dan las
componentes en los planos A y B de la fuerza equilibrante.
Digitalización y compaginación: José.L.Sidoti
Página 78 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
EJEMPLO
El ejemplo de la figura trata del equilibrado de un árbol cigüeñal de tres manivelas de
un motor alternativo a pistón, mediante la adición de contrapesos en los planos A y
B.
Las fuerzas de inercia sobre cada manivela (*) se designan con P1 ; P 2 ; P 3 que por
ser iguales forman un polígono cerrado (polígono de fuerzas). El sistema está
estáticamente equilibrado.
Tomando momentos respecto a B se tendrá P1 ⋅ l + P2 ⋅ b2 + Px A ⋅l = 0 , donde Px A es
la fuerza que se debe aplicar en el plano A para que la sumatoria de momentos
respecto a B sea cero.
En la figura se han representado los vectores momentos divididos por l
P1 + P2 ⋅
b2
+ Px A = 0
l
Px A = mgω 2 rg , que nos permite fijar el peso del contrapeso y su posición.
Digitalización y compaginación: José.L.Sidoti
Página 79 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
m g = masa del contrapeso
rg = radio de ubicación
De la misma manera se procede para obtener el valor del contrapeso en el plano B ,
es necesario ahora tomar momentos respecto a A .
Como el lado de cierre del polígono de fuerzas es cero, las fuerzas a aplicar en los
planos A y B deben ser iguales y opuestas.
(*) En los motores alternativos se considera como masa actuante sobre el muñón de
manivela a la totalidad de las masas rotantes con él más la mitad de las masas en
movimiento alternativo.
1
⎛
⎞
Pi = ⎜ mr i + ma i ⎟ ⋅ ω 2 ⋅ ri
2
⎝
⎠
mr i =
ma i =
ω=
ri =
Masa rotante reducida a cada muñón del cigüeñal distanciado ri del eje
geométrico (se consideran los brazos de manivela y 2 3 del peso total
de la biela).
Masa alternativa correspondiente a cada cilindro ( 1 3 del peso de la
biela más los pesos totales del pistón, perno y aros).
Velocidad angular del cigüeñal.
Radio de manivela.
DINÁMICA DEL MOVIMIENTO POLAR
Se denomina movimiento polar a aquel que realiza un sólido que tiene un punto fijo.
En este caso las ecuaciones de la dinámica establecen:
⎛ dQ ⎞
F (e) = ⎜
⎟ +ω ∧Q
⎝ dt ⎠ r
Digitalización y compaginación: José.L.Sidoti
Página 80 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
⎛ d K 01 ⎞
⎟ + ω ∧ K 01
M ( e ) = ⎜⎜
⎟
dt
⎝
⎠r
Dónde el subíndice “ r ” indica que la derivada debe tomarse suponiendo la terna relativa 01 i1 ; j 1 ; k 1 inmóvil y ω la rotación de esta respecto a la galileana. Cuando los
ejes de referencia coinciden con los principales de inercia del sólido respecto al
punto fijo 01 se obtienen las ecuaciones de Euler:
(
)
dω x
⎧
⎪ M x = dt ⋅ J x + ω z ω y (J z − J y )
⎪
dω
(1)⎪⎨M y = y ⋅ J y + ω xω z (J x − J z )
dt
⎪
d
⎪ M = ω z ⋅ J + ω ω (J − J )
z
y x
y
x
⎪⎩ z
dt
En el caso más general R (e ) y M (e ) son funciones del tiempo, la posición y la
velocidad. La posición puede quedar determinada por los ángulos de Euler:
ψ (spin )
; θ (nutación )
y ϕ ( precesión )
Y la velocidad por:
ω = ω x ⋅ i1 + ω y ⋅ j 1 + ω z ⋅ k 1
Cuyas componentes en función de tales ángulos son: (ver VI - 3)
dϕ
dθ
⎧
⎪ω x = dt senψ ⋅ senθ + dt cosψ
⎪
(2)⎪⎨ω y = dϕ cosψ ⋅ senθ − dθ senψ
dt
dt
⎪
d
d
ϕ
ψ
⎪ ω =
cosθ +
cosψ
z
⎪⎩
dt
dt
Las seis ecuaciones diferenciales (1) y (2) permiten calcular los ángulos eulerianos
en función del tiempo que es el objetivo perseguido.
La integración de tales ecuaciones solo es posible en casos particulares, uno de ellos,
que pasamos a estudiar, es el llamado Movimiento por Inercia.
MOVIMIENTO POR INERCIA
En este movimiento la resultante de las fuerzas exteriores pasa por el punto fijo
(Ejemplo: fuerzas gravíficas, Baricentro fijo).
Digitalización y compaginación: José.L.Sidoti
Página 81 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Como consecuencia de ello el momento de las fuerzas exteriores respecto a dicho
⎛ d K1 ⎞
⎟ + ω ∧ K1
punto fijo será nulo: ⎜⎜
⎟
⎝ dt ⎠ r
Las ecuaciones de Euler dan:
dω x
⎧
⎪ M e x = dt ⋅ J x + ω zω y (J z − J y ) = 0
⎪
dω y
⎪
⋅ J y + ω xω z ( J x − J z ) = 0
⎨M e y =
dt
⎪
⎪ M = dω z ⋅ J + ω ω (J − J ) = 0
z
y x
y
x
⎪⎩ e z
dt
El estado cinético depende únicamente del movimiento inicial ( ω
(movimiento espontáneo o por inercia).
Se presentan tres casos diferentes según sea la forma del sólido:
inicial)
1) El elipsoide de inercia es una esfera.
En tal caso: J x 01 = J y 01 = J z 01
Que en las ecuaciones de Euler dan:
dω y
dω
dω
J x 01 ⋅ x = 0; J y 01 ⋅
= 0; J z 01 ⋅ z = 0;
dt
dt
dt
Que corresponde a: ω x = cte; ω y = cte; ω z = cte
Es decir, la rotación inicial persiste.
2) El elipsoide es de revolución.
J x1 = J y 1
El sólido se denomina de estructura giroscópica y k 1 es el eje giroscópico.
d K 01
Como M 01 = 0 debe ser
=0 y
K 01 = cte .
dt
La dirección de K 01 es fija en el espacio y la tomamos para definir el eje “ z ”
(sistema fijo), eje de precesión de los ángulos de Euler.
Eligiendo un sistema de ejes en rotación 01 ≡ G (*) tal que z1 coincida con el eje
de simetría del cuerpo y el eje y1 en el plano formado por los ejes “ z ” y “ z1 ”
siendo x1 ; y1 ; z1 ejes principales de inercia del sólido se tiene:
K 01 x = J x 1 ⋅ ω x 1 = 0
porque
x1 ⊥ z ∴ω x1 = 0
Digitalización y compaginación: José.L.Sidoti
Página 82 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
K 01 y = J y 1 ⋅ ω y 1 = K 01 ⋅ senθ
∴ω y 1 = K 01 ⋅ senθ J y 1
K 01 z = J z 1 ⋅ ω z1 = K 01 ⋅ cos θ
∴ω z 1 = K 01 ⋅ cos θ J z 1
Dado que ω x1 = 0 el ángulo θ = cte y el cuerpo se mantiene en precesión ((*)
Ver nota en página 85) estable alrededor del eje "z" (ver ángulos de Euler).
Como la expresión de ω es ω = ω y1 ⋅ j 1 + ω z1 ⋅ k 1 esta está contenida en el plano
x1 y1 ≡ zz1 y el ángulo γ que forma con el eje z1 se puede obtener mediante
ωy
J
tgγ = 1 = z 1 ⋅ tgθ = cte ya que lo son J z 1 ; J y 1 y θ luego γ es constante.
ω z1 J y1
Podemos descomponer a ω entonces en la suma de dos vectores, uno fijo en el
espacio, sobre el eje “ z ” (precesión) (ω p ) y otro solidario con el sólido de dirección
“ z1 ” (spin) (ω s ) , ambos de módulo constante por serlo θ y γ .
Digitalización y compaginación: José.L.Sidoti
Página 83 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
El movimiento del sólido podemos reducirlo como se vio en cinemática al estudiar
composición de rotaciones axiales concurrentes, al movimiento de rodadura sin
resbalamiento de un cono “poloide” solidario con el cuerpo, de eje z1 y ángulo de
cono γ , sobre otro cono "herpoloide" fijo en el espacio, de eje z y ángulo de cono
θ − γ , de tal manera que en cada instante la generatriz de contacto corresponde al
vector ω .
Si J z 1 < J y 1 elipsoide alargado, γ < θ y el vector ω se encuentra dentro del ángulo
z 01 z1 ; los conos son tangentes externamente, la precesión es directa.
Si J z 1 > J y1 elipsoide achatado, γ > θ y el vector ω está fuera del ángulo z 01 z1 ; el
cono fijo está dentro del cono del cuerpo, la precesión es retrógrada.
Si el cuerpo se hace rotar alrededor de un eje principal de inercia ω y K tienen la
misma orientación y el cuerpo permanece rotando alrededor de ese eje.
3) Elipsoide de inercia es de tres ejes diferentes
Las ecuaciones de Euler:
(
)
(
)
dω x 1
⎧
⋅ J x1 + ω z1ω y1 J z1 − J y1 = 0
M
=
0
⎪ 1x
dt
⎪
dω y 1
⎪
⋅ J y1 + ω x1ω z1 (J x1 − J z1 ) = 0
⎨M 01 y =
dt
⎪
⎪ M = dω z1 ⋅ J + ω ω J − J = 0
z1
y 1 x1 y 1
x1
⎪⎩ 01 z
dt
Digitalización y compaginación: José.L.Sidoti
Página 84 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Tienen como soluciones particulares:
ω x1 = cte
ω y1 = cte
ω z1 = cte
ω y1 = ω z1 = 0
ω x1 = ω z 1 = 0
ω x1 = ω y 1 = 0
Que corresponden a rotaciones uniformes alrededor de uno cualquiera de los ejes
principales de inercia relativos a 01 (rotación permanente).
Para otras soluciones ver descripción de Poinsot del movimiento por inercia.
(*) Cuando se adopta un sistema de referencia solidario con el cuerpo como el
que se definió en Cinemática del Rígido y que vinimos utilizando en Dinámica
del Sólido, la velocidad angular de arrastre de la terna móvil es idénticamente
igual a la velocidad angular del cuerpo.
Sin embargo hay muchas aplicaciones donde es conveniente usar un sistema de
referencia que no esté realmente fijo al cuerpo y aunque este rota respecto al
sistema se mantengan constantes los momentos y productos de inercia del cuerpo
respecto a los mismos.
Tal es el caso de un sólido de estructura giroscópica, por ejemplo, cuando se adopta un sistema de referencia móvil de tal manera que el eje de revolución del
sólido coincida con uno de los ejes del sistema; la velocidad de spin será velocidad relativa del sólido respecto al eje móvil y la velocidad de arrastre del
sistema móvil no coincide con la velocidad angular del cuerpo.
EXPRESIÓN DE LA ENERGÍA CINETICA EN PUNCIÓN DE Q y K
La expresión de Q para un sólido es:
n
n
1
1
[
]
n
n
1
1
Q = ∑ mi ⋅ V i = ∑ mi ⋅ V 01 + ω ∧ (Pi − 01 ) = ∑ mi ⋅V 01 + ∑ mi ⋅ ω ∧ (Pi − 01 )
Multiplicando escalarmente por
V 01
se tiene:
2
2
Q × V 01 M V 01 1 n
=
+ ∑ mi ⋅ ω ∧ (Pi − 01 ) × V 01
2
2
2 1
La expresión de K 01 es:
n
n
n
1
1
1
[
]
K 01 = ∑ mi ⋅ V i ∧ (01 − Pi ) = ∑ mi ⋅V 01 ∧ (01 − Pi ) + ∑ mi ⋅ ω ∧ (Pi − 01 ) ∧ (01 − Pi )
Digitalización y compaginación: José.L.Sidoti
Página 85 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
n
n
1
1
[
]
= ∑ mi ⋅ V 01 ∧ (01 − Pi ) + ∑ mi ⋅ (Pi − 01 ) ∧ ω ∧ (Pi − 01 )
Que multiplicada escalarmente por
ω
2
da:
[
]
K 01 × ω 1 n
1 n
= ∑ mi ⋅ ω × V 01 ∧ (01 − Pi ) + ∑ mi ⋅ ω × (Pi − 01 ) ∧ ω ∧ (Pi − 01 )
2
2 1
2 1
=
[
][
]
1 n
1 n
(
)
m
⋅
ω
∧
0
−
P
×
V
+
01
∑ i
∑ mi ⋅ ω ∧ (Pi − 01 ) × ω ∧ (Pi − 01 )
1
i
2 1
2 1
Sumando las expresiones obtenidas y teniendo en cuenta que:
∑ mi ⋅ (Pi − 01 ) = M (G − 01 ) y 2 ∑ mi ⋅ [ω ∧ (Pi − 01 )]
n
1
n
2
1
1
=
1
Jω ⋅ω 2
2
Se tiene:
[
]
2
2
1 n
1
1
1
Q × V 01 + K 01 × ω = M V 01 + M V 01 × ω ∧ (G − 01 ) + ∑ mi ⋅ ω ∧ (Pi − 01 )
2 1
2
2
2
2
1
1
= M V 01 + J ω ⋅ ω 2 + M V 01 × ω ∧ (G − 01 ) = Ec
2
2
Que es la expresión de la energía cinética de un sólido encontrada anteriormente.
Luego:
1
1
Ec = Q × V 01 + K 01 × ω
2
2
1
Si 01 es fijo Ec = K 01 × ω
2
1
Si ω = 0 es Ec = Q × V 01
2
ELIPSOIDES DE INERCIA, ENERGÉTICO Y DEL "DRALL",
Referido a los ejes principales de inercia x0 ; y0 ; z 0 el elipsoide de inercia tiene por
expresión: J x 0 ⋅ x 2 + J y 0 ⋅ y 2 + J z 0 ⋅ z 2 = 1
Siendo sus semiejes: a1 =
1
; b1 =
J x0
1
; c1 =
J y0
1
J z0
Digitalización y compaginación: José.L.Sidoti
Página 86 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
En el caso de una rotación alrededor de un punto fijo 01 la energía cinética está dada
1
1
1
1
por: Ec = ⋅ J ω ⋅ ω 2 = ⋅ J x ⋅ ω x2 + ⋅ J y ⋅ ω y2 + ⋅ J z ⋅ ω z2
2
2
2
2
Dividiendo miembro a miembro por Ec se tiene:
I=
Jy
Jx
J
⋅ ω x2 +
⋅ ω y2 + z ⋅ ω z2
2 Ec
2 Ec
2 Ec
Que es también la ecuación de un elipsoide, el "ELIPSOIDE ENERGÉTICO", cuyos
2 Ec
2 Ec
2 Ec
semiejes son: a2 =
; c2 =
; b2 =
Jy
Jx
Jz
Si se mantiene constante la energía cinética, el elipsoide energético representa el
lugar geométrico de los extremos libres del vector rotación ω cuando se hace variar
el eje de rotación que pasa por 01 .
Multiplicando cada término del elipsoide energético sucesivamente por:
Jx Jy Jz
; ;
Jx Jy Jz
2
2
J x ⋅ ω x2 J y ⋅ ω y J z 2 ⋅ ω z2
I=
+
+
2 Ec ⋅ J x 2 Ec ⋅ J y 2 E c ⋅ J z
2
Siendo: K x = J x ⋅ ω x ; K y = J y ⋅ ω y ; K z = J z ⋅ ω z
2
2
2
Ky
Kx
Kz
que es la ecuación de otro elipsoide,
Se tiene: I =
+
+
2 E c ⋅ J x 2 Ec ⋅ J y 2 E c ⋅ J z
“ELIPSOIDE DEL DRALL”, cuyos semiejes valen:
a3 = 2 Ec ⋅ J x ; b3 = 2 Ec ⋅ J y ; c3 = 2 Ec ⋅ J z
Digitalización y compaginación: José.L.Sidoti
Página 87 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Y que al igual que antes, cuando Ec = cte , representa el lugar geométrico de los
extremos libres de los vectores K 01 cuando varía el eje de rotación.
Relaciones entre los tres elipsoides
Si se hallan las relaciones entre los semiejes homólogos de los elipsoides de inercia y
energético se tiene:
1
Jx
a1
b
c
1
=
=
= 1 = 1 = cte
a2
2 Ec
2 Ec b2 c2
Jx
Luego el elipsoide de inercia y el energético son semejantes.
0 E1 =
0E =
2 Ec
=ω
Jω
1
Jω
Los planos tangentes a los dos elipsoides en los puntos homólogos son paralelos.
Haciendo el producto de los semiejes homólogos de los elipsoides energético y del
Drall o bien del de inercia y el del Drall se obtiene:
a 2 ⋅ a3 =
2 Ec
⋅ 2 Ec ⋅ J x = 2 Ec = b2 ⋅ b3 = c2 ⋅ c3 = cte
Jx
a1 ⋅ a3 =
1
⋅ 2 Ec ⋅ J x = 2 Ec = b1 ⋅ b3 = c1 ⋅ c3 = cte
Jx
En ambos casos los productos resultan constantes; esto es, el semieje mayor de uno
de ellos corresponde el semieje menor del otro y recíprocamente.
Digitalización y compaginación: José.L.Sidoti
Página 88 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Relación entre los vectores K 01 y ω
Supongamos que el origen de coordenadas móviles coincide con el centro de
gravedad del cuerpo y que los ejes de referencia sean los principales de inercia en
dicho punto.
Estudiaremos como varia
al variar K 01 al variar ω .
[
n
]
[
n
]
K 01 = ∑ mi ⋅ ω ∧ (Pi − 01 ) ∧ (01 − Pi ) = ∑ mi ⋅ (Pi − 01 ) ∧ ω ∧ (Pi − 01 )
1
1
n
n
1
1
[
]
K 01 = ∑ mi ⋅ ω ⋅ (Pi − 01 )2 − ∑ mi ⋅ (Pi − 01 ) ⋅ ω × (Pi − 01 )
Diferenciando:
n
[
n
]
d K 01 = ∑ mi ⋅ d ω ⋅ (Pi − 01 ) − ∑ mi ⋅ (Pi − 01 ) ⋅ d ω × (Pi − 01 )
2
1
1
Multiplicando escalarmente por ω
n
[
n
][
]
][
]
d K 01 × ω = ∑ mi ⋅ ( Pi − 01 ) d ω × ω − ∑ mi ⋅ d ω × ( Pi − 01 ) ⋅ ( Pi − 01 ) × ω
2
1
1
Si se multiplica K 01 escalarmente por d ω
n
n
[
K 01 × d ω = ∑ mi ⋅ (Pi − 01 ) ω × d ω − ∑ mi ⋅ d ω × (Pi − 01 ) ω × (Pi − 01 )
2
1
1
Expresión que resulta idéntica a la anterior, luego:
d K 01 × ω = K 01 × d ω
Si la variación de ω
(d ω ) se efectúa en el plano tangente al elipsoide energético, lo
que se verifica para Ec = cte , siendo Ec =
dEc =
(
1
K 01 × ω
2
)
1
K 01 × d ω + ω × d K 01 = 0
2
Digitalización y compaginación: José.L.Sidoti
Página 89 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Debe ser: K 01 × d ω = 0 y ω × d K 01 = 0
Luego K 01 es perpendicular al plano tangente al elipsoide energético en el extremo
libre de ω .
Análogamente ω es perpendicular al plano tangente al elipsoide del Drall.
DESCRIPCIÓN DE POINSSOT DEL MOVIMIENTO POR INERCIA
Se vio que en el movimiento por inercia:
K 01 = J x ⋅ ω x ⋅ i1 + J y ⋅ ω y ⋅ j 1 + J z ⋅ ω z ⋅ k 1 = cte
y como el sólido tiene vínculos independientes del tiempo y no originan frotamiento,
el trabajo de las fuerzas exteriores es nulo.
Siendo dΤ = dEc la energía cinética es constante, que puede escribirse:
o
1
1
Ec = ω × K 01 = cte o bien Ec = ω × K 01 ⋅ K
2
2
De donde:
o
2E
ω×K = c
K 01
Que expresa que la proyección de la rotación ω sobre el eje del Drall se mantiene
constante.
Sea un sólido con un punto fijo 01 ; en el instante inicial su estado de velocidad este
dado por ω .
Digitalización y compaginación: José.L.Sidoti
Página 90 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Por el extremo libre del vector ω se hace pasar el elipsoide energético; el vector K 01
es constante, el plano π normal a K 01 trazado por la punta de ω es tangente al
elipsoide.
Como la proyección de ω sobre K 01 (01 D ) debe ser constante, el plano π es fijo y
como la punta de ω debe pertenecer simultáneamente a π y al elipsoide, el
movimiento por inercia del sólido resulta ser el movimiento de rodadura sin
resbalamiento del elipsoide energético del cuerpo sobre el plano fijo π normal a K 01
o
y situado a la distancia ω × K .
En el caso de un elipsoide energético de revolución, como correspondería a un sólido
de estructura giroscópica, las líneas de rodadura son todas circulares, perpendiculares
al eje de revolución; también son círculos los caminos sobre el plano π .
Si el elipsoide es de tres ejes, como lo que debe mantenerse constante es la
o
proyección de ω sobre K , las líneas de rodadura adoptan las formas de la figura.
Se puede observar qué la constancia de la energía cinética Ec no implica
necesariamente la constancia de ω ; es decir ω cambia de eje y de módulo
continuamente, esto nos permite esbozar nuevas soluciones a las particulares ya encontradas en el estudio del movimiento por inercia para un sólido que tiene un elipsoide de inercia de tres ejes, donde ω resultaba constante cuando el movimiento
se hacía sobre uno cualquiera de los ejes principales de inercia.
Notando que los caminos de rodadura se cruzan sobre el eje intermedio, una rotación
alrededor de esto eje resulta inestable.
Digitalización y compaginación: José.L.Sidoti
Página 91 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Digitalización y compaginación: José.L.Sidoti
Página 92 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
MOVIMIENTO DE UN SÓLIDO ALREDEDOR DE PUNTO FIJO
Hemos estudiado el movimiento por inercia, este es uno de los casos del movimiento
polar, es decir el movimiento alrededor de un punto fijo.
Este movimiento podemos materializarlo soportando al sólido mediante una doble
suspensión cardánica, de tal manera que cualquiera que sea la orientación que tome
el mismo en el espacio, un punto de él permanezca inamovible.
Un dispositivo de innegable interés práctico que se mueve en tales condiciones es el
giróscopo.
GIRÓSCOPO
El GIRÓSCOPO es un sólido en rotación con un punto fijo y cuyo elipsoide de inercia respecto a dicho punto fijo es de revolución alrededor del eje de rotación.
El plano perpendicular al mismo es el plano ecuatorial; si el punto fijo no coincide
con G se tiene el GIRÓSCOPO PESADO.
Propiedades del giróscopo
Supongamos un disco homogéneo que puede girar alrededor de su baricentro
mediante una suspensión cardánica como se indica en la figura, el conjunto
constituye lo que hemos definido como giróscopo.
Consideremos los siguientes estados:
1) El disco no gira. Al aplicar la fuerza P debido al momento que esta origina
respecto al punto fijo, el eje x1 girará alrededor del eje y1
Digitalización y compaginación: José.L.Sidoti
Página 93 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
2) Haciendo girar el disco con ω r elevado, al aplicar P en el punto A , el eje
x1 en vez de inclinarse, gira lateralmente alrededor de z1 (precede); hay
arrastre de la terna móvil.
La rotación ω a = ω p hace girar el eje de Spin hacia el eje de momentos,
tendiendo a ponerlos paralelos, por eso esta propiedad se denomina
Tendencia al PARALELISMO.
*
3) Si se suprime P pero se aplica exteriormente una rotación ω = ω p alrede*
dor del eje z , el eje x1 se levanta hasta colocarse paralelo a ω - EFECTO
GIROSCÓPICO, que es opuesto al momento de la fuerza necesaria para
producir una precesión igual a la rotación que lo origina.
E (Efecto giroscópico) y P (paralelismo) están en la relación de acción y
reacción.
GIROSCOPO PESADO
El centro de gravedad del sólido en rotación no coincide con el punto fijo.
En tal caso, adoptando un sistema de ejes como el de la figura, se tiene:
⎛ d K 01 ⎞
⎟ + ω ar ∧ K 01 = P ∧ (01 − G )
M 01 = ⎜⎜
⎟
⎝ dt ⎠1
Donde: K 01 = J x1 ⋅ ω r ⋅ i1 + J z1 ⋅ ωar ⋅ k 1
Digitalización y compaginación: José.L.Sidoti
Página 94 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Siendo: ω r = cte y ω ar = cte (estud. caso de precesión estable)
⎛ d K 01 ⎞
⎟ =0
Es ⎜⎜
⎟
⎝ dt ⎠1
Y M 01 = ω ar ∧ K 0 1 =
i1
0
j1
0
J x1 ⋅ ω r
0
(
k1
ω ar = J x1 ⋅ ωr ⋅ ωar ⋅ j
J x1 ⋅ ω ar
)
Que equivale a: M 01 = J x1 ⋅ ω ar ∧ ω r (momento de las fuerzas exteriores)
(
)
El opuesto J x1 ⋅ ω r ∧ ω ar = C g es la Cupla Giroscópica.
Ejemplo:
La figura representa un molino plano, donde el rodillo de peso W rueda sobre la
solera accionando al eje vertical del mecanismo al que se le imprime la rotación ω a .
Se pretendo determinar la presión sobre la solera:
Digitalización y compaginación: José.L.Sidoti
Página 95 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
(
)
M 01 = (P − W ) ⋅ l ⋅ i1 = J z1 ω a ∧ ω r = J z1 ⋅ ω a ⋅ ω r ⋅ i1
J
ω ⋅l
W
P = z1 ⋅ ω a ⋅ ω r + W
J z1 = ⋅ ri2 ;
ω r = a (rodadura )
g
l
r
⎛ r 2 ⋅ ω a2 ⎞
W ri 2
⎟
⋅ ⋅ ω a2 + W = W ⎜⎜1 + i
g r
r ⋅ g ⎟⎠
⎝
La presión sobre la solera se ve incrementada por el efecto giroscópico.
Reemplazando: P =
CASO DE PRECESIÓN FIJA DISTINTA DE 90°
El ángulo que forma el eje de Spin con el eje de precesión es un ángulo cualquiera.
Se pretende determinar cuales son las condiciones que debe reunir el giróscopo para
que exista precesión estable, esto es ϕ = cte .
Igual que antes el momento de las fuerzas exteriores es:
⎛ d K 01 ⎞
⎟ + ω ar ∧ K 01
M 01 = ⎜⎜
⎟
⎝ dt ⎠1
⎛ d K 01 ⎞
⎟ =0
Por ser ω r = cte y nos proponemos ω a = cte es ⎜⎜
⎟
dt
⎠1
⎝
ω a , en función de sus componentes sobre los ejes móviles es:
ω a = ω a ⋅ cos ϕ ⋅ i1 + ω a ⋅ senϕ ⋅ k 1
Habiendo tomado el eje z1 en el plano zx1
K 01 = J x1 ⋅ ω x1 ⋅ i1 + J y1 ⋅ ω y1 ⋅ j1 + J z1 ⋅ ω z1 ⋅ k 1
ω x1 = ωr + ωa ⋅ cos ϕ ;
ω y1 = 0;
ω z1 = ω a ⋅ senϕ
K 01 = J x1 ⋅ (ω r + ω a ⋅ cos ϕ ) ⋅ i1 + J z1 ⋅ (ω a ⋅ senϕ ) ⋅ k 1
El momento de las fuerzas exteriores es entonces:
2
M 01 = ω a ∧ K 0 1 = J x1 ⋅ (ω r + ω a ⋅ cos ϕ ) ⋅ ω a ⋅ senϕ − J z 1 ⋅ ω a ⋅ senϕ ⋅ cos ϕ ⋅ j 1
[
[
]
]
= J x1 ⋅ ω a ⋅ ω r ⋅ senϕ + J x1 ⋅ ω a ⋅ senϕ ⋅ cos ϕ − J z 1 ⋅ ω a ⋅ senϕ ⋅ cos ϕ ⋅ j 1
2
2
Digitalización y compaginación: José.L.Sidoti
Página 96 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
[
]
= J x1 ⋅ ω a ⋅ ω r ⋅ senϕ + ( J x1 − J z 1 ) ⋅ ω a ⋅ senϕ ⋅ cos ϕ ⋅ j 1
2
⎡
⎤
ω
= ω a ⋅ ω r ⋅ senϕ ⋅ j1 ⎢ J x1 + (J x1 − J z 1 )⋅ a ⋅ cos ϕ ⎥
ωr
⎣
⎦
⎡
⎤
ω
M 01 = ω a ∧ ω r ⎢ J x1 + (J x1 − J z1 ) ⋅ a ⋅ cos ϕ ⎥
ωr
⎣
⎦
Que es la condición necesaria para que haya precesión fija.
1. Si J x1 = J z1
M 01 = J x1 ⋅ ω a ∧ ω r
2. Si ω r >> ω a
M 01 ≅ J x1 ⋅ ω a ∧ ω r
igual al caso de ϕ = 90º .
aproxim. Igual al caso ϕ = 90º .
MASA VARIABLE
De acuerdo con las ecuaciones de la dinámica, la derivada de la cantidad de movimiento respecto al tiempo es igual a la resultante de las fuerzas exteriores.
dQ
= R Donde Q = m ⋅ v
dt
Teniendo ahora un sistema en el cuál la masa varía
dQ
dv
dm
=m
+v
dt
dt
dt
Es decir debemos considerar un término que tenga en cuenta la variación de masa.
Consideremos el caso de un cohete de masa M que en un intervalo de tiempo Δt
pequeño expulsa en forma continua una masa ΔM de gas con una velocidad relativa
al cohete V r (determinada por la combustión y demás condiciones de la tobera) en
dirección opuesta a la velocidad del cohete V , esta última referida a un sistema en
reposo (esta es la velocidad de arrastre de la terna móvil que suponemos no
rotatoria).
Digitalización y compaginación: José.L.Sidoti
Página 97 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
La cantidad de movimiento antes de la expulsión es:
Q1 = M ⋅ V
Donde M = M c + M g es la masa del cohete más la masa de los gases.
Luego de un tiempo Δt desde el funcionamiento, la cantidad del movimiento del
sistema será:
(
⎧(M − ΔM ) V + ΔV
Q2 = ⎨
⎩ ΔM V + V r
(
)
)
lo que queda en el cohete
gas expelido
La variación de la cantidad de movimiento entre los dos instantes es:
ΔQ = Q 2 − Q1 = M V − ΔM V + MΔV − ΔMΔV + ΔM V + ΔM V r − M V
Relacionándola con el tiempo y tomando límites para Δt → 0 , se tiene:
dQ
d V dM
=M
+
Vr
dt
dt
dt
Expresión que debe ser igual a cero si suponemos la inexistencia de fuerzas
exteriores.
dM
⎧
⎪ M a = − dt ⋅ V r
d V dM
⋅V r = 0 ∴ ⎨
M
+
1 dM
dt
dt
⎪a = − ⋅
⋅V r
M dt
⎩
Que nos da la aceleración actuante sobre el cohete.
Considerando un cohete que asciende verticalmente con una velocidad inicial V0 y
la única fuerza exterior en el peso, se tendrá:
Digitalización y compaginación: José.L.Sidoti
Página 98 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
dQ
dV dM
=M⋅
+
⋅ Vr = R = − M ⋅ g
dt
dt
dt
Como todos los vectores actúan sobre una misma recta vertical podemos trabajar con
sus módulos. Luego:
1 dM
⋅
⋅Vr
M dt
Llamando m0 la masa de gases quemados por segundo (caudal másico), la masa del
cohete para un instante t será M (t ) = M i − m0 ⋅ t ∴ M i = masa inicial.
a = −g −
dM
= −m0 con lo que resulta:
dt
Derivando respecto al tiempo
a = −g +
m0
⋅Vr ∴ m0 ⋅ Vr = E , se denomina EMPUJE (fuerza).
M
Luego:
a = −g +
m0 ⋅ Vr
M i − m0 ⋅ t
Expresión que nos da el valor de la aceleración entre t 0 y t q (tiempo de quemado);
para t ≥ t q ⇒ a = − g (movimiento de tiro libre: el empuje resulta igual a cero y la
masa es constante).
Si E = m0 ⋅Vr > M ⋅ g el cohete puede partir del reposo y V0 puede ser igual a cero.
A pesar de ser E = cte , la aceleración crece con el tiempo (por disminución de l
masa).
De la expresión de la aceleración, integrando, podemos obtener la velocidad en
función del tiempo:
t
⎡
⎛M
⎞⎤
m0 ⋅ dt
= V0 − g ⋅ t + Vr ⎢− ln⎜⎜ i − t ⎟⎟⎥ =
V(t ) = V0 − g ⋅ t + Vr ∫
M i − m0 ⋅ t
⎝ m0
⎠⎦ 0
0
⎣
t
Digitalización y compaginación: José.L.Sidoti
Página 99 de 128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Mi
⎡ Mi
⎛ Mi
⎞⎤
m0
V(t ) = V0 − g ⋅ t + Vr ⎢ln
=
− ln⎜⎜
− t ⎟⎟⎥ = V0 − g ⋅ t + Vr ln
Mi
⎝ m0
⎠⎦
⎣ m0
−t
m0
1
V(t ) = V0 − g ⋅ t + Vr ln
m
1− 0
⋅t
Mi
M ⋅g
(M ⋅ g = m0 ⋅ t q )
Para el tiempo de quemado: t q =
m0
1
La velocidad máxima será: Vmáx = V0 − g ⋅ t + Vr ln
1− M ⋅ g M i
La velocidad aumenta logaritmicamente hasta el valor máximo.
M ⋅g
→ 1 (0,95 en cohetes
La velocidad final será tanto mayor a medida que
Mi
grandes); también se puede aumentar aumentando Vr .
Los gráficos siguientes muestran la variación de la masa y la aceleración en función
del tiempo.
Cohete de dos etapas
La velocidad final alcanzada por el cohete puede aumentarse dividiendo e este en
varias etapas. Compararemos dos cohetes, de una y dos etapas respectivamente y de
iguales masas.
Digitalización y compaginación: José.L.Sidoti
Página 100 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Para hacer comparativos los resultados de ambos casos, consideremos que se
cumplen las siguientes condiciones:
M i = Mg + M c = Mg1 + M c1 + Mg 2 + M c 2
M ⋅ g = M ⋅ g1 + M ⋅ g 2 ; M c = M c 1 + M c 2
M ⋅ g M ⋅ g1 M ⋅ g 2
=
=
Mi
M i1
M i2
Suponiendo además que m0 y Vr es la misma en ambos cohetes.
Al final de la primera etapa, en el tiempo do quemado t q , antes de desprenderse la
sección 1 del cohete, M ⋅ g1 = 0
M c 1 + M c 2 + M ⋅ g 2 = M c 1 + M ⋅ g 1 + M c 2 + M ⋅ g 2 − m0 ⋅ t q 1
Siendo t q1 =
M ⋅ g1
se tiene como velocidad máxima al final de la primera etapa:
m0
1
Vq1 = V0 − g ⋅ t q1 + Vr ln
1 − M ⋅ g1
Mi
La velocidad al final de la segunda etapa, con un tiempo de quemado t q 2 =
M ⋅ g2
m0
es:
(
Vq 2 = V0 − g ⋅ t q1 + t q 2
)
⎡
⎤
⎢
⎥
1
1
+ Vr ⎢ln
+ ln
⎥
M ⋅ g1
1− M ⋅ g2
⎢ 1−
M i1
M i 2 ⎥⎦
⎣
La velocidad final para el cohete de una etapa sería:
Digitalización y compaginación: José.L.Sidoti
Página 101 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
⎧
⎪ t q1 + t q 2 = t q
1
⎪
y
V = V0 − g ⋅ t q + Vr ln
∴⎨
1− M ⋅ g
⎪
M
g
⋅
M ⋅g
2
Mi ⎪
=
Mi
⎩ Mi2
La diferencia entre las velocidades finales del cohete de dos etapas y una etapa será:
Vq 2 − V = Vr − ln
1
⋅
1 − M g1
Mi
Expresión que nos da el incremento de velocidad final del cohete de dos etapas en
relación con el de una sola etapa.
La razón física de la ganancia de velocidad reside en el hecho que en un cohete de
varias etapas se van desprendiendo durante el vuelo las masas inertes de las carcasas
que contenían el combustible utilizado, disminuyendo así la masa que debe ser
acelerada por las etapas siguientes.
Digitalización y compaginación: José.L.Sidoti
Página 102 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
BOLILLA N ° 9
DINÁMICA Y VIBRACIONES
•
•
VIBRACIONES LINEALES Y TORSIONALES CON UNO Y DOS
GRADOS DE LIBERTAD; MODOS DE VIBRAR; DETERMINACIÓN DE
LOS NODOS.
VIBRACIONES DE FLEXIÓN EN EJES; DETERMINACIÓN DE LA
VELOCIDAD CRÍTICA; DUNKERLEY; MÉTODO DE LOS NÚMEROS
DE INFLUENCIA.
Digitalización y compaginación: José.L.Sidoti
Página 103 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
VIBRACIONES LINEALES CON DOS GRADOS DE LIBERTAD
En el dispositivo de la figura las masas pueden moverse independientemente una con
respecto a la otra, existen dos grados de libertad.
El desplazamiento relativo entre
las dos masas vibrantes permite establecer el
estado de tensión del resorte que las vincula.
Desplazando m1 en x1 ; m2 experimenta un desplazamiento x2 pudiéndose
establecer que: l ' = l − x1 + x2
Δl = l − l ' = l − (l − x1 + x2 ) = x1 − x2
Considerando a cada una de las masas como cuerpo libre, se pueden establecer las
ecuaciones diferenciales del movimiento de las mismas.
d 2 x1
− k1 ⋅ x1 − k 3 ( x1 − x2 ) = 0
dt 2
d 2x
m1 ⋅ 21 + k1 ⋅ x1 + k3 ( x1 − x2 ) = 0
dt
d 2x
m1 ⋅ 21 + (k1 + k 3 ) ⋅ x1 − k 3 ⋅ x2 = 0
dt
− m1 ⋅
Digitalización y compaginación: José.L.Sidoti
Página 104 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
d 2 x2
+ k 3 ( x1 − x2 ) − k 2 ⋅ x2 = 0
dt 2
d 2x
m2 ⋅ 22 − k3 ⋅ x1 + (k 2 + k3 ) ⋅ x2 = 0
dt
− m2 ⋅
Suponiendo que el movimiento es periódico y esta compuesto por movimientos
armónicos de varias frecuencias y amplitudes, una de esas componentes puede ser:
x1 = X 1 ⋅ cos ω ⋅ t
x2 = X 2 ⋅ cos ω ⋅ t
De donde:
d 2 x1
= − X 1 ⋅ ω 2 ⋅ cos ω ⋅ t
2
dt
d 2 x2
= − X 2 ⋅ ω 2 ⋅ cos ω ⋅ t
2
dt
Que remplazados en las ecuaciones diferenciales halladas dan:
[− m ⋅ X
1
[− m
2
1
⋅ ω 2 + (k1 + k3 ) ⋅ X1 − k3 ⋅ X 2 ]⋅ cosω ⋅ t = 0
⋅ X 2 ⋅ ω 2 − k3 ⋅ X 1 + (k 2 + k 3 ) ⋅ X 2 ] ⋅ cos ω ⋅ t = 0
Para que estas expresiones se cumplan para cualquier valor de t , deben ser cero los
corchetes:
X1 [− m1 ⋅ ω 2 + (k1 + k3 )] − k3 ⋅ X 2 = 0
X 2 [− m2 ⋅ ω 2 + (k 2 + k 3 )] − k 3 ⋅ X 1 = 0
De donde:
k3
X1
=
2
X 2 − m1 ⋅ ω + (k1 + k 3 )
X 1 − m 2 ⋅ ω 2 + (k 2 + k 3 )
=
X2
k3
Las relaciones de amplitudes deben ser iguales
k3
− m 2 ⋅ ω 2 + (k 2 + k 3 )
=
− m1 ⋅ ω 2 + (k1 + k 3 )
k3
Operando se llega a:
Digitalización y compaginación: José.L.Sidoti
Página 105 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
ω4 − ω2 ⋅
m1 ⋅ (k 2 + k3 ) + m2 ⋅ (k1 + k3 ) k1 ⋅ k 2 + k1 ⋅ k3 + k 2 ⋅ k3
+
=0
m1 ⋅ m2
m1 ⋅ m2
Ecuación cuadrática en ω 2 que es la ECUACIÓN DE LA FRECUENCIA DEL
SISTEMA.
Resolviéndola da dos valores para ω 2
2
ω
2
1, 2
⎛ k + k k + k ⎞ k ⋅k + k ⋅k + k ⋅k
k +k k +k
= 1 3 + 2 3 ± ⎜⎜ 1 3 + 2 3 ⎟⎟ − 1 2 1 3 2 3
2m1
2m2
2 m2 ⎠
m1 ⋅ m2
⎝ 2m1
Ejemplo
Supongamos: k1 = k 2 = k y m1 = m2 = m
2
k + k3
⎛ k + k3 ⎞ k + 2 ⋅ k ⋅ k3
=
± ⎜
⎟ −
m
m2
⎝ m ⎠
k + k3 k3 k + 2 ⋅ k3
ω12 =
+
=
m
m
m
k
k
k
+
k
3
− 3 =
ω 22 =
m
m m
2
ω
2
1, 2
Remplazando en: para la frecuencia mayor
k3
k3
X1
=
=
= −1
2
X 2 − m1 ⋅ ω + (k + k 3 ) − k − 2 ⋅ k 3 + k + k 3
( A)
Y para la frecuencia menor.
k3
X1
=
=1
X 2 − k + k + k3
( B)
Ambos son los MODOS DE VIBRAR. El caso ( A) significa que las dos masas
recorren el mismo espacio pero en sentido opuesto, los desplazamientos son
simétricos y el punto medio del resorte central (resorte de acoplamiento) puede
considerarse como fijo (NODO); actúan como dos sistemas independientes con un
grado de libertad cada uno, vinculados a tierra con resortes de constantes:
k + 2 ⋅ k 3 (Ver acoplamiento de resortes en paralelo).
En el caso ( B ) las dos masas se mueven al mismo tiempo con la misma amplitud y el
resorte del medio nunca se encuentra comprimido ni extendido, luego no recibe
efecto alguno del movimiento.
Digitalización y compaginación: José.L.Sidoti
Página 106 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Esto nos dice que si desplazamos ambas masas igual valor pero en sentido opuesto y
las libramos, vibrarán con un movimiento armónico simple de pulsación ω1 .
X 1' = A ⋅ cos ω1 ⋅ t
X 2' = − A ⋅ cos ω1 ⋅ t = A ⋅ cos(ω1 ⋅ t + π )
Caso( A)
Si desplazamos ambas masas igual valor en la misma dirección y las libramos, vibraran con otro movimiento armónico simple de pulsación ω 2
X 1" = B ⋅ cos ω 2 ⋅ t
X 2" = B ⋅ cos ω 2 ⋅ t
Caso( B)
Aquí las oscilaciones se encuentran en fase.
Para un sistema de masas cualesquiera y resortes de diferentes constantes k , las
oscilaciones de cada masa serán la composición de dos movimientos armónicos de
diferente pulsación y fase:
X 1 = A1 ⋅ cos(ω1 ⋅ t + ϕ1' ) + B1 ⋅ cos(ω 2 ⋅ t + ϕ 2' )
X 2 = A2 ⋅ cos(ω1 ⋅ t + ϕ1" ) + B2 ⋅ cos(ω 2 ⋅ t + ϕ 2'' )
Donde las constantes A1 ; A2 ; B1 ; B2 ;ϕ1' ;ϕ 2' ;ϕ1'' ;ϕ 2'' deben determinarse en base a las
condiciones iniciales del movimiento.
El movimiento resultante de cada masa es un movimiento periódico (no armónico)
como el estudiado en cinemática en composición de movimientos armónicos sobre
un mismo eje, de frecuencias distintas.
VIBRACIONES TORSIONALES
Supongamos un disco sustentado por una barra elástica como indica la figura:
Digitalización y compaginación: José.L.Sidoti
Página 107 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Si se aplica al disco una torsión M t produciremos un desplazamiento angular θ , que
si nos mantenemos dentro del límite elástico del material de la barra, está vinculado
con el momento torsor por la ley de Hooke.
M t = − k1 ⋅θ
Donde k1 es la constante de torsión de la barra ( k1 =
π ⋅ d 4 ⋅G
para barra cilíndrica
32 ⋅ l
con G = Módulo elástico de torsión del material de la barra).
Si después do desplazar en θ al disco desde su posición de equilibrio, lo liberamos,
este comenzará a oscilar con una ley equivalente a la vista en vibraciones lineales:
d 2θ
J ⋅ 2 = −k1 ⋅ θ
dt
Donde J es el momento de inercia del disco respecto al eje de rotación.
d 2θ
d 2θ k1
+ =0
De la anterior: J ⋅ 2 + k1 ⋅ θ = 0;
dt
dt 2
J
2
d θ
k
+ ρ 2 ⋅θ = 0
Y haciendo: 1 = ρ 2
2
dt
J
Que es la ecuación característica del movimiento oscilatorio armónico.
Si tuviéramos un amortiguamiento viscoso proporcional a la velocidad:
d 2θ
dθ
J ⋅ 2 + k2 ⋅
+ k1 ⋅ θ = 0
dt
dt
d 2θ
dθ
+ 2⋅c⋅
+ ρ 2 ⋅θ = 0
2
dt
dt
Y si tuviéramos además una carga perturbadora (en este caso en forma de momento
torsor):
d 2θ
dθ
M ⋅t
+ 2⋅c⋅
+ ρ 2 ⋅θ =
⋅ cos ω ⋅ t
2
dt
dt
J
Ecuaciones idénticas a las establecidas para vibraciones lineales que se resuelven y
discuten en la misma forma.
VIBRACIONES TORSIONALES CON DOS GRADOS DE LIBERTAD
Consideremos el sistema de la figura:
Digitalización y compaginación: José.L.Sidoti
Página 108 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Si aplicamos al disco de momento de inercia J 1 un momento torsor N t que le
produce un desplazamiento angular θ1 por la vinculación elástica el disco de
momento de inercia J 2 girará un ángulo θ 2 .
Si en estas condiciones dejamos libre al sistema, los discos comenzarán a vibrar. Las
ecuaciones del movimiento las obtenemos considerando a cada disco como cuerpo
libre.
Disco 1
Los momentos restauradores de la posición de equilibrio son: k1 ⋅ θ1 para el tramo de
eje de constante k1 y k 3 ⋅ (θ1 − θ 2 ) para el tramo entro discos.
Aplicando D`Alembert se tiene:
Digitalización y compaginación: José.L.Sidoti
Página 109 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
d 2θ1
+ k1 ⋅θ1 + k 3 ⋅ (θ1 − θ 2 ) = 0
dt 2
d 2θ1
J 1 ⋅ 2 + (k1 + k 3 ) ⋅ θ1 − k 3 ⋅ θ 2 = 0
dt
J1 ⋅
Disco 2
− J2 ⋅
d 2θ 2
= k 2 ⋅ θ 2 − k3 ⋅ (θ1 − θ 2 )
dt 2
d 2θ 2
J 2 ⋅ 2 + (k 2 + k 3 ) ⋅ θ 2 − k 3 ⋅ θ 1 = 0
dt
Supongamos que el movimiento es periódico y está compuesto por movimientos
armónicos de varias frecuencias y amplitudes. Luego una de esas componentes puede
ser:
θ 1 = θ 1 ⋅ cos ω ⋅ t ⎫
⎬ , lo que nos da
θ 2 = θ 2 ⋅ cos ω ⋅ t ⎭
⎧ d 2θ1
2
⎪⎪ dt 2 = −θ1 ⋅ ω ⋅ cos ω ⋅ t
⎨ 2
⎪ d θ 2 = −θ 2 ⋅ ω 2 ⋅ cos ω ⋅ t
⎪⎩ dt 2
Que remplazado en las ecuaciones obtenidas:
[− J ⋅θ
1
[− J ⋅θ
2
2
1
⋅ ω 2 + (k1 + k 3 ) ⋅θ1 − k 3 ⋅θ 2 ]⋅ cos ω ⋅ t = 0
⋅ ω 2 + (k 2 + k 3 ) ⋅ θ 2 − k3 ⋅ θ1 ] ⋅ cos ω ⋅ t = 0
Para que estas expresiones se cumplan para cualquier valor de t deben ser cero los
corchetes:
k3
θ1 ⋅ [− J1 ⋅ ω 2 + (k1 + k3 ) − k3 ⋅θ 2 ] = 0 ⇒ θ1 =
2
θ 2 − J1 ⋅ ω + (k1 + k3 )
2
θ 2 ⋅ [− J 2 ⋅ ω 2 + (k 2 + k3 ) − k3 ⋅θ1 ] = 0 ⇒ θ1 = − J 2 ⋅ ω + (k 2 + k3 )
k3
θ2
Igualando y operando se llega a:
Digitalización y compaginación: José.L.Sidoti
Página 110 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
ω4 −ω2 ⋅
J 1 ⋅ (k 2 + k 3 ) + J 2 ⋅ (k1 + k 3 ) k1 ⋅ k 2 + k1 ⋅ k 3 + k 2 ⋅ k 3
+
=0
J1 ⋅ J 2
J1 ⋅ J 2
Que es la ecuación de la frecuencia del sistema; resolviéndola nos da dos valores
para ω 2 :
2
ω12, 2 =
k1 + k3 k 2 + k3
k ⋅ k + k1 ⋅ k3 + k 2 ⋅ k3
⎛ k + k3 k 2 + k3 ⎞
+
± ⎜ 1
+
⎟ − 1 2
2 J1
2J 2
2J 2 ⎠
J1 ⋅ J 2
⎝ 2 J1
Ejemplo:
Supongamos: k1 = k 2 = k
J1 = J 2 = J
2
ω
2
1, 2
k + k3
⎛ k + k3 k 2 + k3 ⎞ k 2 + 2 ⋅ k ⋅ k3
=
± ⎜
+
⎟ −
J
2J 2 ⎠
J2
⎝ J
k + k 3 k 3 k + 2k 3
ω12 =
+
=
J
J
J
k
k
k
+
k
3
− 3 =
ω 22 =
J
J J
Que nos da:
θ1
θ2
k3
= −1 , para la frecuencia mayor, los discos giran con
k + 2k 3 ⎞
⎛
− J ⋅⎜
⎟ + (k + k3 )
⎝ J ⎠
igual amplitud pero en sentido contrario.
La sección media del eje central permanece estática (nodo).
k3
θ1 =
= 1 , para la frecuencia menor, los dos discos giran con igual
θ 2 − k + k + k3
amplitud en el mismo sentido; el tramo intermedio del eje no sufre deformación.
=
Ejemplo:
Si se supone k1 = k 2 = 0
J1 ≠ J 2
k3
k
+ 3 ±
2 J1 2 J 2
k
k
ω12 = 3 + 3 =
J1 J 2
ω12, 2 =
k ⎞
⎛ k3
+ 3 ⎟
⎜
⎝ 2 J1 2 J 2 ⎠
k3 ( J1 + J 2 )
J1 J 2
2
ω 22 = 0
Remplazando la frecuencia mayor en la expresión que nos da la relación de
amplitudes.
θ1
θ2
=
J 2 ⋅ k3
J
=− 2
− J1 ⋅ k3 − J 2 ⋅ k3 + J 2 ⋅ k3
J1
Digitalización y compaginación: José.L.Sidoti
Página 111 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Los discos vibran en sentido opuesto con amplitudes inversamente proporcionales a
los momentos de inercia de los discos.
Hay una sección del árbol que no sufre torsión alguna, es el NODO ó PUNTO
NODAL.
Ubicación del NODO
l1 θ1 J 2
=
=
; l1 + l 2 = l
l2 θ 2 J1
J
J
J
J
l1 = l 2 ⋅ 2 = (l − l1 ) ⋅ 2 = l ⋅ 2 − l1 ⋅ 2
J1
J1
J1
J1
J
J
J1
⎛ J ⎞
l1 ⋅ ⎜1 + 2 ⎟ = l ⋅ 2 ∴ l1 = l ⋅ 2 ⋅
J1
J1 J1 + J 2
⎝ J1 ⎠
J2
J1
l1 = l ⋅
y l2 = l ⋅
J1 + J 2
J1 + J 2
Como conclusión final podemos establecer, igual que se hizo para vibraciones
lineales con dos grados de libertad, que para un sistema compuesto por discos de
distinto momento de inercia, vinculados por tramos de ejes de diferente constante
elástica, las oscilaciones de cada disco será la composición de dos movimientos
armónicos de diferente pulsación y fase, en los cuales las constantes de las
respectivas ecuaciones de movimiento deben ser establecidas en función de las
condiciones iniciales del movimiento.
En el dispositivo demostrador de vibraciones torsionales con dos grados de libertad
se pueden visualizar la dos formas de vibrar, que corresponden a las dos pulsaciones
propias del sistema.
Torciendo uno de los volantes un cierto ángulo ( 2π por ejemplo) en un sentido y
haciendo lo propio con el otro volante en sentido contrario, si se los suelta
simultáneamente se verá oscilar a cada uno de los volantes a un lado y otro de la
posición de equilibrio y el movimiento lo harán en sentido contrario, notándose que
un punto marcado al centro del árbol intermedio queda inmóvil, es el NODO del
movimiento. Esta es una de las maneras de vibrar y es la que corresponde a la
Digitalización y compaginación: José.L.Sidoti
Página 112 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
frecuencia mayor, por ende el período será el menor, su valor se puede determinar
con un cronómetro.
Si se tuercen ahora los dos volantes en un mismo sentido y un mismo ángulo y se liberan, los volantes y el tramo central del árbol oscilarán alrededor de la posición de
equilibrio como si se tratara de un único cuerpo rígido; es la otra manera de vibrar y
corresponde a la frecuencia menor, cuyo período mayor puede también ser medido
con cronómetro.
Si se tuercen los volantes diferentes ángulos y se los libera, cada uno de ellos oscilará
con una combinación de dos movimientos armónicos correspondientes a cada una de
las frecuencias anteriores y cuyos otros parámetros dependerán de las condiciones
iniciales del movimiento.
Determinar:
1) Período y pulsación para cada una de las
maneras de vibrar.
2) Constante de torsión del árbol.
3) Momento de inercia de cada masa y GD.
4) Ecuación del movimiento de cada uno de
los volantes cuando al (1) se lo retuerce
θ1 = 3π 2 , manteniendo fijo al volante (2)
θ 2 = 0 y se los libera simultáneamente.
5) Período del movimiento resultante.
6) Representación gráfica de las oscilaciones
de cada volante.
Si un árbol flexible soporta en un punto cualquiera una polea de peso G cuyo centro
de gravedad dista e[cm] del eje del árbol, cuando este gira con velocidad angular ω ,
la fuerza centrífuga Fc producirá una flecha “ y ”.
Digitalización y compaginación: José.L.Sidoti
Página 113 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Si k1 es la constante elástica del árbol:
Fc = m ⋅ ω 2 ⋅ ( y + e ) = k1 ⋅ y ∴ω 2 ⋅ ( y + e ) =
k1
⋅ y = ρ2 ⋅ y
m
ω2 ⋅ y +ω2 ⋅e = ρ 2 ⋅ y
ω 2 ⋅ e = y ⋅ (ρ 2 − ω 2 )
De donde:
ω2
ω2 ⋅e
ρ2
y= 2
e
=
⋅
ρ −ω2
ω2
1− 2
ρ
k1
es la pulsación propia del eje (no amortiguado). Si
m
y = ∞ y habrá resonancia.
Recordando que ρ =
ω=ρ ,
Grafiquemos " y" y r = y + e en función de
ω
ρ
Para ω = 0 ⇒ y = 0 y para ω = ρ ⇒ y = ∞ .
Cuando ω → ∞ ⇒ y → e .
Cuando ω → ρ con valores decrecientes y → −∞ .
Digitalización y compaginación: José.L.Sidoti
Página 114 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Se observa que superado el valor de resonancia
ω
= 1 para valores de ω lo
ρ
crecientes y → −e y r → 0 .
El eje se centra automáticamente.
VELOCIDADES CRÍTICAS
La pulsación propia del sistema es: ρ =
k1
m
Si f es la flecha estática del eje debida a la carga G será f =
G
G
∴ k1 = .
k1
f
G
g
y ρ=
.
g
f
La resonancia se produce cuando ρ = ω en este caso ω es la pulsación crítica y su
Siendo G = m ⋅ g es m =
valor será ωc =
g
( f [cm] ).
f
1
. Cuando
f
existen varias poleas montadas sobre un mismo eje, el número de revoluciones
críticas puede calcularse mediante la fórmula de Dunkerley:
Si se quiere expresar en revoluciones por minuto ( r. p.m. ) nc ≅ 300 ⋅
1
ω
2
c
=
1
ω
2
1
+
1
ω
2
2
+ ... o bien
1
1
1
= 2 + 2 + ...
2
nc n1 n2
Donde ω1 ;ω 2 ; etc. , son las velocidades críticas del árbol supuesto sin masa cargado
separadamente por las poleas 1;2; etc. .
1
ω
ωc =
2
c
=
g
∑f
f1 f 2
∑f
+ + ... =
g g
g
o nc ≅ 300
∑f
Los valores dados por la fórmula de Dunkerley están aproximadamente un 4% por
debajo de los reales.
La velocidad crítica de un eje que no soporta carga excepto su propio peso puede
determinarse aplicando la fórmula anterior considerándolo constituido por un
determinado número de rodajas de masa conocida.
Para árboles lisos sin carga con γ = 7,8 Kg dm 3 y E = 2.100.000 Kg cm 2 se tiene:
Árbol apoyado
nc = 1.225 × 10 7 d
Digitalización y compaginación: José.L.Sidoti
l2
Página 115 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Árbol empotrado
nc = 2.777 ×10 7 d
l2
d [cm] ; l [cm]
VIBRACIONES DE FLEXIÓN EN EJES CON VARIOS GRADOS DE
LIBERTAD
Emplearemos el procedimiento de los números de influencia.
Numero de influencia es la deformación que experimenta un eje en una determinada
sección (1) cuando se carga con una fuerza de 1Kg en otra sección (2 ) ; este numero
lo designamos con α 12 y significa la deformación de la sección (1) cuando se carga
la sección (2 ) con 1Kg ; este número de influencia se denomina cruzado; si la fuerza
actuara sobre la misma sección considerada se denomina número de influencia
directo.
Los dos números de influencia cruzados que se pueden establecer entre dos secciones
α12 y α 21 de acuerdo con el teorema de reciprocidad de Maxwell son iguales.
Supongamos un eje que sustenta 3 poleas (3 grados de libertad)
Sean x1 ; x2 ; x3 las deformaciones en cada sección en la condición de máxima
deformación del eje.
d 2 x1 d 2 x2 d 2 x3
y las fuerzas de inercia
;
;
Cada masa tendrá una aceleración que vale
dt 2 dt 2 dt 2
d 2x
d 2x
d 2x
que cada una de ellas ejercen sobro el eje son − m1 ⋅ 21 ;−m2 ⋅ 22 ;− m3 ⋅ 23 , de
dt
dt
dt
tal forma, las deformaciones y las fuerzas están relacionadas de la siguiente manera:
d 2 x3
d 2 x2
d 2 x1
⎧
m
m
x
m
⋅
−
⋅
⋅
α
α
α
=
−
⋅
⋅
−
⋅
11
1
12
2
13
3
⎪ 1
dt 2
dt 2
dt 2
⎪
2
2
d 2 x3
d x2
d x1
⎪
(1)⎨ x2 = −α 21 ⋅ m1 ⋅ 2 − α 22 ⋅ m2 ⋅ 2 − α 23 ⋅ m3 ⋅ 2
dt
dt
dt
⎪
2
2
2
d
x3
d
x
d
x
⎪ x = −α ⋅ m ⋅
2
1
m
m
α
α
−
⋅
⋅
−
⋅
⋅
33
3
32
2
3
31
1
2
2
⎪⎩
dt
dt
dt 2
El sistema de tres ecuaciones diferenciales permite determinar los desplazamientos
x1 ; x2 ; x3 .
Considerando como soluciones particulares para:
Digitalización y compaginación: José.L.Sidoti
Página 116 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
x1 = X 1 ⋅ senω ⋅ t
x2 = X 2 ⋅ senω ⋅ t
x3 = X 3 ⋅ senω ⋅ t
Resulta:
d 2 x1
= − X 1 ⋅ ω 2 ⋅ senω ⋅ t
2
dt
d 2 x2
= − X 2 ⋅ ω 2 ⋅ senω ⋅ t
dt 2
d 2 x3
= − X 3 ⋅ ω 2 ⋅ senω ⋅ t
2
dt
Valores que reemplazados en el sistema (1) da:
⎧ X 1 ⋅ senω ⋅ t = (α 11 ⋅ X 1 ⋅ m1 ⋅ ω 2 + α 12 ⋅ X 2 ⋅ m2 ⋅ ω 2 + α 13 ⋅ X 3 ⋅ m3 ⋅ ω 2 )⋅ senω ⋅ t
⎪
2
2
2
⎨ X 2 ⋅ senω ⋅ t = (α 21 ⋅ X 1 ⋅ m1 ⋅ ω + α 22 ⋅ X 2 ⋅ m2 ⋅ ω + α 23 ⋅ X 3 ⋅ m3 ⋅ ω )⋅ senω ⋅ t
⎪ X ⋅ senω ⋅ t = (α ⋅ X ⋅ m ⋅ ω 2 + α ⋅ X ⋅ m ⋅ ω 2 + α ⋅ X ⋅ m ⋅ ω 2 )⋅ senω ⋅ t
31
1
1
32
2
2
33
3
3
⎩ 3
⎧ ⎛α ⋅ m − 1 ⎞ ⋅ X + α ⋅ m ⋅ X + α ⋅ m ⋅ X = 0
12
2
2
13
3
3
⎪ ⎜⎝ 11 1 ω 2 ⎟⎠ 1
⎪⎪
1
(2)⎨⎛⎜ α 21 ⋅ m1 − 2 ⎞⎟ ⋅ X 1 + α 22 ⋅ m2 ⋅ X 2 + α 23 ⋅ m3 ⋅ X 3 = 0
ω ⎠
⎪⎝
⎛
⎪ α ⋅m − 1 ⎞⋅ X +α ⋅m ⋅ X +α ⋅m ⋅ X = 0
32
2
2
33
3
3
⎪⎩⎜⎝ 31 1 ω 2 ⎟⎠ 1
Para que el sistema tenga solución, los coeficientes de x1 ; x2 ; x3 deben cumplir con la
condición:
m1 ⋅ α 11 −
Haciendo
1
ω2
1
m2 ⋅ α12
ω2
m3 ⋅ α 13
1
m1 ⋅ α 21
m2 ⋅ α 22 −
m1 ⋅ α 31
m2 ⋅ α 32
ω2
m3 ⋅ α 23
m3 ⋅ α 33 −
=0
1
ω2
= t y desarrollando:
(m1 ⋅ α11 − t ) ⋅ [(m2 ⋅ α 22 − t ) ⋅ (m3 ⋅ α 33 − t ) − (m2 ⋅ α 32 ⋅ m3 ⋅ α 23 )] +
+ m2 ⋅ α12 ⋅ [(m1 ⋅ α 31 ⋅ m3 ⋅ α 23 ) − m1 ⋅ α 21 (m3 ⋅ α 33 − t )] +
+ m3 ⋅ α13 ⋅ [(m1 ⋅ α 21 ⋅ m2 ⋅ α 32 ) − m1 ⋅ α 31 (m2 ⋅ α 22 − t )] = 0
Digitalización y compaginación: José.L.Sidoti
Página 117 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Obtenemos una ecuación de tercer grado (1 grado por grado de libertad) del tipo
a ⋅t3 + b⋅t2 + c ⋅t + d = 0 .
Que resuelta nos da tres valores para t ' que nos permiten determinar las tres
velocidades críticas del sistema:
1
t1
1
ω2 =
t3
1
ω3 =
t3
ω1 =
⇒
n1 =
⇒ n2 =
30 ⋅ ω1
π
30 ⋅ ω 2
π
30 ⋅ ω3
⇒ n3 =
π
MODOS DE VIBRAR
De las ecuaciones (2 ) multiplicando la primera por α 23 y la segunda por α13 y
restando miembro a miembro se tiene:
α 23 ⋅ ⎛⎜ α 11 ⋅ m1 −
1 ⎞
⎟ ⋅ X 1 + α 23 ⋅ α12 ⋅ m2 ⋅ X 2 + α 23 ⋅ α 13 ⋅ m3 ⋅ X 3 = 0
ω2 ⎠
⎝
1
α13 ⋅ ⎛⎜ α 21 ⋅ m1 − 2 ⎞⎟ ⋅ X 1 + α13 ⋅ α 22 ⋅ m2 ⋅ X 2 + α 13 ⋅ α 23 ⋅ m3 ⋅ X 3 = 0
ω ⎠
⎝
____________________
__________
__________________________________________
1
1
X 1 ⋅ ⎡⎢(α 23 ⋅ α 11 − α 13 ⋅ α 21 ) ⋅ m1 − α 23 ⋅ 2 ⎤⎥ + X 2 ⋅ ⎡⎢(α 23 ⋅ α12 − α13 ⋅ α 22 ) ⋅ m2 − α 13 ⋅ 2 ⎤⎥ = 0
ω ⎦
ω ⎦
⎣
⎣
1
(α 23 ⋅ α12 − α13 ⋅ α 22 ) ⋅ m2 − α13 ⋅ 2
X1
ω
=
X 2 (α ⋅ α − α ⋅ α ) ⋅ m − α ⋅ 1
23
11
23
13
21
1
2
ω
De la misma manera se puede establecer la relación entre X 1 y X 3 expresiones en
las que reemplazando loe valores de los ω obtenidos se pueden visualizar los
diferentes modos de vibrar.
Ejemplo:
Determinar las velocidades angulares críticas para el sistema con tres grados de
libertad del esquema siguiente.
Digitalización y compaginación: José.L.Sidoti
Página 118 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Las masas de las poleas 1 y 3 , m1 = m3 son equivalentes al peso de 10 Kg.
La masa de la polea 2 , m2 es equivalente al peso de 20 Kg.
El eje es de acero de φ = 5cm lo que da I ≅ 30cm 4 , E = 2.100.000
Para el cálculo de los números de influencia utilizamos las expresiones obtenidas
(por ejemplo) del Tomo I, Página 136 del tratado Resistencia de Materiales de
Timoshenko:
P ⋅b⋅ x
6⋅l ⋅ E ⋅ I
P ⋅b⋅ x
fx =
6⋅l ⋅ E ⋅ I
fx =
(l 2 − b 2 − x 2 ) para x ≤ a
P ⋅ ( x − a )3
2
2
2
(l − b − x )+ 6 ⋅ l ⋅ E ⋅ I para
x≥a
En las que reemplazando valores se tiene:
α11 = α 33 = 1,48 ×10 −3
α12 = α 21 = α 32 = α 23 = 1,81 × 10 −3
α13 = α 31 = 1,15 × 10 −3
α 22 = 2,64 ×10 −3
Siendo m1 = 0,01
Kg ⋅ seg 2
Kg ⋅ seg 2
y m2 = 0,02
cm
cm
Podemos establecer el siguiente determinante:
Digitalización y compaginación: José.L.Sidoti
Página 119 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
1,48 − t
1,81
1,15
3,62
1,15
1
5,28 − t
1,81 = 0 donde t =
⋅ 10 5
2
ω
3,62 1,48 − t
Que desarrollado nos da la siguiente ecuación de tercer grado:
− t 3 + 8,24 ⋅ t 2 − 3,39 ⋅ t + 0,28 = 0
La que resuelta da tres valores para t:
t1 = 7,81056 t 2 = 0,31598 t 3 = 0,11345
Que permiten calcular las tres velocidades angulares críticas del sistema:
ω1 = 113,155 ⋅ 1 seg ω 2 = 546,436 ⋅ 1 seg ω3 = 939,06 ⋅ 1 seg
O bien:
n1 = 1.081⋅ rpm 5.383,14 ⋅ rpm ω3 = 8.971,9 ⋅ rpm
Si se establecen las relaciones entre las semiamplitudes máximas del movimiento de
las masas para las diferentes velocidades angulares calculadas o bien los diferentes
valores de t, se pueden determinar los diferentes modos de vibrar.
t1
t2
t3
x2 x1
1,43
-0,03*
-0,64
x3 x1
1
1
1
(*) Este valor debió dar 0 (cero), de cualquier manera es bastante aproximado.
Aplicando la fórmula de Dunkerley la velocidad crítica de primer orden vale:
f =
a2 ⋅ b2 ⋅ F
3⋅ E ⋅ I ⋅l
f1 = 0,015 ⋅ cm f 2 = 0,053 ⋅ cm f 3 = 0,015 ⋅ cm
300
300
nc 1 =
=
= 1.041 ⋅ rpm
0
,
083
f
∑
Digitalización y compaginación: José.L.Sidoti
Página 120 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Como esta velocidad así calculada es un 4% inferior a la normal:
nc1 = 1.041×1,04 = 1.082 ⋅ rpm , que coincide con el valor calculado por el método
anterior.
Ejercicio N ° 7:
Utilizando conceptualmente la formula de Dunkerley, determinar la velocidad crítica
de primer orden de un eje que no soporta carga excepto su propio peso. El eje está
montado sobre cojinetes a bolillas, es de acero, tiene diámetro “ d ” constante y la
distancia entre apoyos es “ l ”.
Como ejemplo numérico hacer el cálculo para d = N [cm] l = 20 A[cm]
Ejercicio N ° 8
El mismo anterior montado sobre bujes.
Ejercicio N ° 9
Determinar las velocidades angulares críticas por flexión para el sistema con dos
grados de libertad del esquema siguiente.
Comparar el valor obtenido para la velocidad de primer orden con la que se puede
calcular por Dunkerley.
Esquematizar las diferentes formas de vibrar.
eje φ = 50 + N [cm]
mater. = acero
Digitalización y compaginación: José.L.Sidoti
Página 121 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
BOLI LLA N ° 10
PERCUSIONES
•
PERCUSIÓN EN UN SÓLIDO CON EJE FIJO; ANULACIÓN DE
REACCIONES PERCUTIVAS; CENTRÓ DE PERCUSIÓN.
TEMAS AGREGADOS:
•
•
CHOQUE; CHOQUE ENTRE CUERPOS ELÁSTICOS, PLÁSTICOS Y
NATURALES; PERDIDA DE ENERGÍA EN EL CHOQUE;
APLICACIONES,
CHOQUE ENTRE CUERPOS QUE ROTAN.
Digitalización y compaginación: José.L.Sidoti
Página 122 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
PERCUSIÓN
Percusión es una fuerza indefinidamente grande actuando en un intervalo de tiempo
indefinidamente pequeño, de tal modo que produzca una variación finita en la
cantidad de movimiento de una masa m sobre la cual actúa.
De la expresión:
dQ
F (e ) =
, se tiene F ( e ) ⋅ dt = d Q
dt
Que establece que el IMPULSO de una fuerza es igual a la variación elemental de la
cantidad de movimiento.
Sin embargo podemos hacer que la variación de la cantidad de movimiento se
mantenga en valores finitos haciendo que la fuerza crezca a valores indefinidamente
grandes cuando el tiempo de actuación de la misma disminuye a valores
indefinidamente pequeños.
Se tiene entonces: F ⋅ Δt = ΔQ = m ⋅ (V − V 0 )
Cuando se estudia la acción de percusiones sobre sistemas materiales se establecen
las siguientes leyes a los efectos de simplificar el problema, el enunciado de las
mismas por si solo justifica su licitud.
Leyes:
1) Si actúan simultáneamente fuerzas ordinarias y percusiones los efectos de las
primeras se desprecian.
2) Durante el lapso de actuación de las percusiones el punto de aplicación se
considera inmóvil.
Partiendo de las expresiones obtenidas en el capítulo de dinámica do los sistemas:
dQ
dK
F (e ) =
; M (e ) =
+ V 01 ∧ Q
dt
dt
n
dK
= ∑ F ( e ) i ∧ (0 i − Pi )
En la que la segunda queda: M ( e ) =
dt
1
Si se considera inmóvil el punto 01 , (centro de momentos), V01 = 0
Multiplicando por dt e integrando entre t1 y t 2 = t1 + Δt se tiene para la primera:
F ( e ) ⋅ dt = d Q
∫
t2
t1
F ( e ) ⋅ dt = Q 2 − Q1 = I ( e )
Que nos dice que la diferencia entre la cantidad de movimiento inmediatamente
después y antes de aplicada la percusión es igual al impulso de las fuerzas percutivas.
Y para la segunda
n
∑F( )
e i
⋅ dt ∧ (0 i − Pi ) = d K
1
n
∑∫
1
t2
t1
F ( e ) i ⋅ dt ∧ (0 i − Pi ) = K 2 − K 1 = M I ( e )
Digitalización y compaginación: José.L.Sidoti
Página 123 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
Que establece que el momento resultante de los impulsos de la percusión exterior es
igual a la diferencia del Drall inmediatamente después y antes de aplicada la
percusión.
PERCUSIONES EN UN SÓLIDO CON EJE FIJO
Sea el sólido de la figura sobre el cual actúan los impulsos percutidos activos y
reactivos indicados:
I = I x ⋅ i1 + I y ⋅ j 1 + I z ⋅ k 1
i1
Q=M⋅ 0
j1
0
k1
xG
yG
zG
ω = M ⋅ ω ⋅ (xG ⋅ j 1 − yG ⋅ i1 )
La sumatoria de las percusiones exteriores en sus proyecciones sobre los ejes, son
iguales a las diferencias de las proyecciones de Q sobre los mismos ejes
inmediatamente después y antes de aplicada la percusión.
⎧∑ Fx = − M ⋅ yG ⋅ (ω 2 − ω1 ) = ( I A x + I B x ) − I x = Q2 x − Q1 x
⎪
(1)⎨ ∑ Fy = M ⋅ xG ⋅ (ω 2 − ω1 ) = (I A y + I B y ) − I y = Q2 y − Q1 y
⎪
∑ Fz = 0 = I A z − I z = Q2 z − Q1 z
⎩
Digitalización y compaginación: José.L.Sidoti
Página 124 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
El momento de la cantidad de movimiento K en función de sus componentes sobre
los ejes de referencia, teniendo ω únicamente componente sobre el eje z1 (eje fijo),
es según se vio en dinámica de los sistemas:
n
K = ∑ mi ⋅ ω ∧ ( Pi − 01 ) ∧ (01 − Pi ) = − J xz ⋅ ω ⋅ i1 − J yz ⋅ ω ⋅ j 1 + J z ⋅ ω ⋅ k 1
1
La sumatoria de los momentos percutivos en sus proyecciones sobre los ejes, son
iguales a las diferencias de las proyecciones de K sobre los mismos ejes
inmediatamente después y antes de aplicada la percusión.
⎧ ∑ N x = −(ω 2 − ω1 ) ⋅ J xz = K 2 x − K1 x
⎪
(2)⎨∑ N y = −(ω 2 − ω1 ) ⋅ J yz = K 2 y − K1 y
⎪ N = −(ω − ω ) ⋅ J = K − K
z
2
1
2z
1z
⎩∑ z
Estos dos sistemas con seis ecuaciones permiten calcular las componentes de los
impulsos de las percusiones reactivas.
ANULACIÓN DE REACCIONES PERCUTIVAS
Supongamos a I paralelo a x1 por simplicidad, aunque el razonamiento es general.
Las ecuaciones (1) se transforman en:
(I A x + I B x ) + I = − M ⋅ yG ⋅ (ω 2 − ω1 ) (a )
Digitalización y compaginación: José.L.Sidoti
Página 125 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
(I
Ay
+ I B y ) = M ⋅ xG ⋅ (ω 2 − ω1 ) (b )
Y las ecuaciones (2 ) (tomando momentos respecto a A ):
− I B y ⋅ h = −(ω 2 − ω1 ) ⋅ J xz
(c )
− I B x ⋅ h + I ⋅ z p = −(ω 2 − ω1 ) ⋅ J yz
− I ⋅ y p = (ω 2 − ω1 ) ⋅ J z
Para que se anule I B y en (c ) debe ser
(d )
(e )
J xz = 0 .
Cumplida esta condición, para que I A y = 0 en (b ) debe ser
xG = 0 . Es decir,
la percusión debe ser normal al plano definido por el eje fijo y el baricentro. (Si no
fuera así en la segunda ecuación de las (1) aparecería I y y no se hubiera obtenido la
anulación de I A y ).
Para que I A x + I B x = 0 debe ser en (a ) I = − M ⋅ yG ⋅ (ω 2 − ω1 ) (que nos hace ver
que para que las reacciones puedan anularse debe ser yG ≠ 0 , si el centro de
gravedad estuviera sobre el eje de rotación esto no se podría conseguir).
− (ω 2 − ω1 ) ⋅ J yz
Y en la (d ) : I ⋅ z p = −(ω 2 − ω1 ) ⋅ J yz ∴ I =
zp
Igualando loa valores de I encontrados se tiene:
− M ⋅ yG ⋅ (ω 2 − ω1 ) =
− (ω 2 − ω1 ) ⋅ J yz
zp
∴ M ⋅ yG ⋅ z p = J yz
Que se satisface para z p = 0 J yz = 0 .
Por lo que el plano xy debe ser baricéntrico y el punto P está en ese plano.
Dado que debe ser J xz = J yz = 0 el eje fijo z debe ser principal de inercia en el punto
que intersecta al plano baricéntrico que contiene la percusión.
Remplazando I = − M ⋅ yG ⋅ (ω2 − ω1 ) en la ecuación (a ) :
M ⋅ yG ⋅ y p ⋅ (ω 2 − ω1 ) = (ω 2 − ω1 ) ⋅ J z
i z2
que es
yG
la condición que debe cumplir el CENTRO DE PERCUSIÓN para que no existan
reacciones percutivas.
Como J z = M ⋅ i z2 siendo i z radio de giro, debe ser yG ⋅ y p = i z2 ∴ y p =
Conclusiones
Para poder anular las reacciones percutivas de un sólido con eje fijo, debe cumplirse
que dicho eje fijo sea principal de inercia en el punto en que es intersectado por el
Digitalización y compaginación: José.L.Sidoti
Página 126 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
plano baricentrico que le es perpendicular; el centro de percusión debe encontrarse
sobre la recta definida por dicho punto intersección y el baricentro, a la distancia
i2
y p = z del primero y la percusión debe ser perpendicular al plano formado por la
yG
mencionada recta y el eje fijo.
El sistema sería:
En el ejemplo que sigue se plantea el problema de otra manera.
Sea un sólido con un plano de simetría que puede rotar alrededor de un eje
perpendicular al mismo en un punto tal como el 01 (una chapa por ejemplo).
Las fuerzas de inercia pueden reducirse en el punto 01 a un momento
M 01 = − J 01 ⋅ a ω y a una resultante única de valor R i = − M ⋅ a G .
Busquemos un punto en el cual el momento de las fuerzas de inercia sea nulo:
Digitalización y compaginación: José.L.Sidoti
Página 127 de
128
Universidad Tecnológica Nacional
Facultad Regional Mendoza
Departamento de Ingeniería Electromecánica
Año 2006
M 0* = M 01 + R i ∧ (0* − 01 ) = 0
M 0* = − J 01 ⋅ a ω − M ⋅ a G ∧ (0* − 01 ) = 0
− M ⋅ a G ∧ (0* − 01 ) = J 01 ⋅ a ω ∴
(0* − 01 ) =
J 01 ⋅ a ω
− M ⋅ aG
=
J 01 ⋅ a ω
M ⋅ aG
=
M ⋅ a G ∧ J 01 ⋅ a ω
(M ⋅ a )
2
G
Podemos trabajar modularmente, de cualquier manera el cociente vectorial ya nos dio
el sentido en el cual debemos ubicar 0* .
J 01 = M ⋅ i021 ; a G = aω ⋅ G − 01
M ⋅ i021 ⋅ aω
i021
0 − 01 =
=
M ⋅ aω ⋅ G − 01 G − 01
*
Expresión que se corresponde con la y p =
iz2
yG
encontrada.
Como en el punto 0* el momento de las fuerzas de inercia es nulo, si aplicamos la
percusión en ese punto, esta no provocará reacción en el punto 01 (toda la percusión
es absorbida por la fuerza de inercia aplicada en dicho punto).
Si la percusión se aplica en otro punto distinto del 0* se producirán reacciones en 01
como se indica en la figura.
Digitalización y compaginación: José.L.Sidoti
Página 128 de
128