INGENIERIA INDUSTRIAL CANDIDO ROMERO SANCHEZ 8° “B
Anuncio

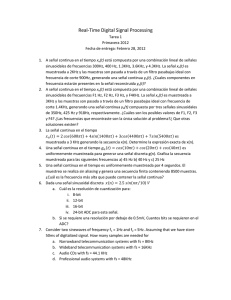
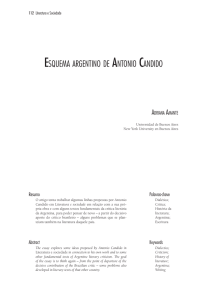
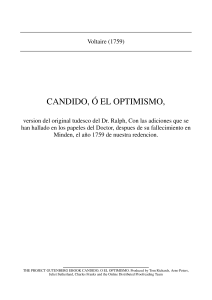
INGENIERIA INDUSTRIAL CANDIDO ROMERO SANCHEZ 8° “B” MECATRONICA VARIABLES ANALOGICAS Y DIGITALES Una variable analógica es aquella que toma infinitos valores entre dos puntos cualesquiera de la misma. Un ejemplo de variable analógica es la temperatura. Si se analiza su variación durante un día, se observa que no puede pasar de una valor a otro dando un salto. Esto quiere decir que si la temperatura se incrementa de 11 grados a 17 grados, toma infinitos valores intermedios. Una variable digital es aquella que solamente puede tomar un determinado número de valores. Un ejemplo de variable digital puede ser el precio de un producto durante los meses del año. De las variables digitales nos interesan las binarias, es decir aquellas que toman solamente un estado de dos posibles. Algunos ejemplos son: una lámpara encendida o apagada, una llave cerrada o abierta, un circuito con tensión o sin tensión, etc. La importancia de las variables binarias radica en el hecho de que los circuitos internos de las computadoras trabajan con ellas. Ejemplos de variables analógicas: Calor Humedad Velocidad PROCESO DE MUESTREO DE UNA SEÑAL La señal de la voz es continua en el tiempo y en amplitud. Para que pueda ser procesada por hardware (y software) digital es necesario convertirla a una señal que sea discreta tanto en el tiempo como en amplitud. Muestreo El muestreo consiste en el proceso de conversión de señales continuas a señales discretas en el tiempo. Este proceso se realizada midiendo la señal en momentos periódicos del tiempo. Veamos un ejemplo, dada la siguiente señal continua: INGENIERIA INDUSTRIAL CANDIDO ROMERO SANCHEZ 8° “B” MECATRONICA Tras muestrearla, obtenemos la siguiente señal discreta: En el ejemplo anterior hemos visto el efecto de muestrear una señal sinusoidal. Si aumentamos el número de muestras por unidad de tiempo, la señal muestreada se parecerá más a la señal continua. El número de muestras por segundo se conoce en inglés como el bit-rate. Si el bit-rate es lo suficientemente alto, la señal muestreada contendrá la misma información que la señal original. Respecto a esto, el criterio de Nyquist asegura que para que la señal muestreada contenga la misma información que la continua, la separación mínima entre dos instantes de muestreo debe ser 1/(2 W) , siendo W el ancho de banda de la señal. Dicho de otra forma, que la frecuencia de muestreo debe ser mayor o igual que 2 W. ¿QUÉ ES UN SISTEMA DE CONTROL? Un sistema dinámico puede definirse conceptualmente como un ente que recibe unas acciones externas o variables de entrada, y cuya respuesta a estas acciones externas son las denominadas variables de salida. Las acciones externas al sistema se dividen en dos grupos, variables de control, que se pueden manipular, y perturbaciones sobre las que no es posible ningún tipo de control. La Figura 3 ilustra de un modo conceptual el funcionamiento de un sistema. VARIABLES DE ENTRADA SISTEMA -VARIABLES DE CONTROL -PERTURBACIONES VARIABLES DE SALIDA INGENIERIA INDUSTRIAL CANDIDO ROMERO SANCHEZ 8° “B” MECATRONICA Dentro de los sistemas se encuentra el concepto de sistema de control. Un sistema de control es un tipo de sistema que se caracteriza por la presencia de una serie de elementos que permiten influir en el funcionamiento del sistema. La finalidad de un sistema de control es conseguir, mediante la manipulación de las variables de control, un dominio sobre las variables de salida, de modo que estas alcancen unos valores prefijados (consigna). Un sistema de control ideal debe ser capaz de conseguir su objetivo cumpliendo los siguientes requisitos: 1. Garantizar la estabilidad y, particularmente, ser robusto frente a perturbaciones y errores en los modelos. 2. Ser tan eficiente como sea posible, según un criterio preestablecido. Normalmente este criterio consiste en que la acción de control sobre las variables de entrada sea realizable, evitando comportamientos bruscos e irreales. 3. Ser fácilmente implementable y cómodo de operar en tiempo real con ayuda de un ordenador.