1 - Cenidet
Anuncio

\
S.E.P.
S.E.I.T.
3.G.I.T.
CENTRO NACIONAL DE INVESTIGACIÓN
Y DESARROLLO TECNOLÓGICO
cenidet
CARACTERIZACIÓN NUMÉRICO- EXPERIMENTAL DEL
COMPORTAMIENTO DINÁMICO DE UNA ESTRUCTURA PARA
PRUEBAS DE VIBRACIÓN
T
PARA
E
OBTENER
M A E S T R O
E N
P
ING.
I
S
E N
EL
I N G E N I E R i A
R
E
JESÚS
S
E
MEDINA
S
GRADO
DE
C I E N C I A S
M E C Á N I C A
N
T
A.
CERVANTES
DIRECTOR D E TESIS: DR. DARIUSZ SZWEDOWICZ WASIK
CUERNAVACA, MOR
.
I
SEP
"I
CENIDET
CENTRO DE INFORMACION
AGOSTO, 2002.
0240677
I1
Cenlro Nacional de lnvesiigacion
y Desarrollo Tecnologico
DEPTO. DE ING. MECÁNICA
OFICIO NÚM. IME-(AM)-216/02
Cuernavaca, Mor., Julio 19, 2002.
Asunto: Se autoriza impresión de tesis y
fecha para examen de grado.
DR. J E S ARNOLDO
~
BAUTISTA
DIRECTOR DEL CENIDET
Presente.
CORRAL
At'n.- Dr. Riqoberto Lonqoria Ramirez
JEFE DEL DEPTO. DE ING. MECÁNICA
Por este conducto hacemos de su conocimiento que, después de haber sometido a revisión el trabajo de tesis
titulado:
"Caracter¡zaci&n Numérico - Experimental del Comportamiento
Dinámico de una Estructura para Pruebas de Vibración"
Desarrollado por el ING. JESÚS MEDINA CERVANTES y habiendo cumplido con todas las correcciones que se
le indicaron, estamos de acuerdo en que se le conceda la autorización de impresión de tesis y la fecha de
examen de grado.
Sin otro particular, quedamos de usted.
81
ATENTAMENTE
COMISIÓN REVISORA
//
/
-I
w.cenidet.edu.mx
Interior internado Palmiia sin. Col. Palmira. A.P. 5-164, C.P. 62490, Cuernavaca. Mor.. Mexico.
TelrlFar ' Mecanica: 314-0037, 312-7613
Telr. (777) 312-2314. 318-7741 Fax 312-2434
cenidet
DEPTO. DE ING. MECANICA
OFICIO NÚM. IME-(AM)-226/02
Cuernavaca, Mor., Agosto 19, 2002.
Asunto: Se autoriza i m w e s i ó n de tesis
ING. JESÚS MEDINA CERVANTES
Candidato al Grado de Maestro
en Ciencias en Ingeniería Mecánica
Presente.
Despues de haber sometido a revisión su trabajo de tesis titulado:
-
"Caracterización Numérico Experimental del Comportarniento
Dinámico de una Estructura para Pruebas de Vibración"
Y habiendo cumplido con las indicaciones que el jurado revisor de tesis realizó, se le comunica que
se le concede la autorización para que proceda a la impresión de la misma como requisito para la
obtención del grado.
Sin otro particular quedo de usted.
!!
i,
..
_.
. . ~.
.
DR. RZGOBERT
.
,;;
L:
,
..
---,,..
,;n-,,3.'.¡
:
..CL¿Cl;O
".\^<_
_i
~
,27iA::,c>iLo
c.c.p.- ipepto. Servs. Escolares
c.c.p.- [;Expediente
www.cenidet.edu.rnx
2.
7
Iriierior Internado Palmira rin, Col. Paimira. A.P. 5-164, C.P. 62490, Cuernavaca, Mor., México.
TelriFax I. Mecanica: 314.0037. 312-7613
Telr. (777) 312-2314. 318-7741 Fax 312-2434
r
-1
...i
1DEDICATORIAS :
A Dios y la Virgen Mana, por darme la vida, llenarme de
alegrías y permitirme alcanzar esta meta.
A mis padres: Mana Raque1 Cervantes Mendozap y
Gonzalo Medina Hemández; por todo su amor, valores
inculcados, apoyo y confianza.
A mis hermanas: GuadalupeP , Yolanda, Alicia, Patricia
y e n especial a Mana Guadalupe; por todo su cariño y
apoyo durante mis estudios.
A mi sobrino: Edgar J. Sandoval; por todos los juegos y
vivencias que compartimos y por ser como un hermano
para mí.
A mi novia: Manana E. Silva; por su amor, apoyo, caririo
y por todo lo que hemos compartido y aprendido juntos.
AGRAD E C I M I E ~ O S :
Al centro Nacional de Investigación y desarrollo Tecnológico
(cenidet),por ser parte de mi formación profesional.
A la Secretaria de Educación Pública (SEP) y al Consejo Nacional
de Ciencia y Tecnología (CONACyTJ, por el apoyo económico
otorgado durante el programa de Maestna.
Al Dr. Dariusz Szwedowicz Wasik, asesor de esta tesis, por su
dirección, experiencia y tiempo aportados a esta investigación;
además, por su valiosa amistad.
'
Al M.C. Eladio Martínez Rayón, mi amigo y revisor de esta tesis,
por toda su ayuda, consejos y el tiempo brindados para este
trabajo.
Al Dr. Jozef Wojcik Filipek, y al M.C. Jorge Bedolla Hemández,
mis revisores de tesis, por sus asesorías y tiempo dedicados a
esta investigación.
A mis maestros del Cenidet, por los conocimientos que me
transmitieron durante mis estudios d e maestría.
A Edgar Mejía y Daniel Montoya, por su gran amistad y los
momentos inolvidables que compartimos en la casa donde
vivimos durante esta aventura.
A mis amigos: Fabián
I
M. Martínez, Anely Herrera, José L.
Martínez, Gabnela Vital, Gerard0 Soriano, Patricia Zavaleta,
Carlos A. Becem'l, Iris A. D í a , Leonardo Garcia, Mónica Parker,
. Mario Espinosa, Araceli Hernández, A'fonso Gaona, Aurora B.
Pascual, Adán J. Trejo, Gonzalo López de Lara, Miguel A. Meza y
Lucio Román; porque he tenido hermosas vivencias junto a cada
uno de ustedes.
A toda la gente que conocí en Cuemavaca y me brindó su
amistad,
. ,
.
CONTENIDO
Contenido
Contenido
LISTA DE FIGURAS
LISTA D E TABLAS
SIMBOLOGíA
111
I\
VI
CAPITULO 1 DESCRIPCIÓN DEL PROBLEMA
1
1.1 Introducción
1
1.2 Objetivo general
5
1.3 Alcances
6
1.4 E s t a d o d e l arte
6
1.4.1 Método de elementos finitos
7
1.4.2 Análisis modal
7
1.4.3 Método de elementos finitos y análisis modal
10
1.4.4 Investigaciones en Cenidet
14
CAPiTULO 2: MODELADO POR ELEMENTOS FINITOS
17
2.1 F u n d a m e n t o s teóricos
17
2.1.1 Ecuación d e movimiento
2.2 Método d e elementos finitos
.I
1
18
71
2.2.1 Tipos d e elementos finitos
23
Elemento sólido o ladrillo
23
Elemento de contacto o gap
24
2.3 Proceso d e modelado por elementos finitos
24
2.4 Resultados
28
2.4.1 Parámetros modales d e . l a , e s t r u c t u r a libre
28
2.4.2 Parámetros modales d e l a e s t r u c t u r a e m p o t r a d a
30
CAPITULO 3: ANÁLISIS MODAL
32
3.1 F u n d a m e n t o s teóricos
32
3.1.1 Consideraciones del sistema
33
3.1.2 Función de transferencia d e un grado de libertad
33
3.1.3 Funciones de respuesta a la frecuencia (FRF's)
34
3.1.4 Sistema de excitación
33
3.1.5 Experimento modal con martillo de impacto
36
pag. i
Coriteriido
3.2 Experimento modal
3.2.1 Equipo
37
3.2.2 Configuración del sistema
38
3.2.3 Mediciones
40
3.3 Análisis de las funciones de respuesta a.la frecuencia
3.3.1 Metodo polinomial de fracciones racionales (RFPM)
3.3.1.1 Método del gradiente
42
42
45
3.3.2 Justificación del'modelo matemático
47
3.3.3 Descripción del programa MEPFRAl
49
3.3.4 Guía de uso del programa MEPFRAl
51
3.3.4.1Preparación del archivo de datos experimentales
51
3.3.4.2 Ejecución del programa MEPFRAI
52
3.4 Resultados
53
3.4.1 Parámetros modales de la estructura libre
56
3.4.2 Parámetros modales de la estructura empotrada
58
CAP~TULO4: ANÁLISIS DE RESULTADOS
61
4.1 Estructur'a libre
61
4.1.1 Análisis de resultados
4.2 Estructura empotrada
4.2.1 Análisis de resultados
'I
37
63
64
64
4.3 Observaciones generales
66
4.4 Ejemplos de rediseño de la estructura
69
4.4.1 Análisis de resultados del primer rediseño
70
4.4.2 Análisis de resultados del segundo rediseño
71
CAP~TULO5: CONCLUSIONES Y RECOMENDACIONES
72
AGRADECIMIENTO
75
Bibliografía
76
Apéndice A
79
Apéndice B
80
Apéndice C
91
Pág. ii
- Lista defiguras
Lista de figuras
Figura 1.1: Fotografia del modo. torsional de vibración del puente Tacoma
2
causado por la excitación del viento (Tacoma narrows bridge, 200 1)
Figura 2.1: Elemento sólido o ladrillo de 8 nodos'
23
Figura 2.2: Elemento finito tipo Gap
24
Figura 2.3: Fotografa de la estructura para pruebas de vibración con marcas
de puntos de medición
24
Figura 2.4: a) Perfil L 62 x 62 x 7 , b) Construcción de la longitud del perfil- 25
Figura 2.5: Modelo discreto de elemento finito de la estructura elaborado en
26
SuperDraw I11 (los distintos tonos de grises representan grupos)
Figura 2.6: Detalle de la condición de empotramiento: a) fotografía del
empotramiento, b) modelo discreto por elementos finitos del empotramiento- 27
Figura 2.7: Ejemplos escogidos de las formas modales de la estructura libre- 29
Figura 2.8: .Ejemplos escogidos de las formas modales de la estructura
empotrada
31
Figura 3.1: Localización de u n polo en el plano s (Richardson and Formenti,
1982)
34
Figura 3.2: Diagrama de u n a FRF (Schwarz and Richardson, 1999)
35
Figura 3.3: Esquema del andisis modal utilizando la técnica de martillo de
impacto
37
"
Figura 3.4: Fotogrdia del sistema de adquisición de los datos experimentales:
(1) martillo de impacto, (2) amplificadores de baja. impedancia, (3)
computadora, (4)analizador de espectros
38
Figura 3.5: Fotografias de las tres diferentes formas de suspension de la
estructura: a) con esponjas comerciales de baja rigidez, b) con ligas
comerciales de baja rigidez, c) con cuerdas de nylon de 40kg de resistencia- 39
Figura 3.6: Elementos de la estructura utilizados para el experimento modal- 40
Figura 3.7: Gráfka del factor de amplificación Q contra la razón de la
frecuencia p(Mendes and Montalvao, 1998)
48
Figura 3.8: Diagrama de flujo dei programa MEPFR.41
.
50
Pag
Ill
. -
!,
Figura 3.9: Ajuste de curvas del elemento l', dirección
.
Lisia de figuras
X
54
.Pág.iv
Lista de tablas
Lista de tablas
Tabla 2.1: Frecuencias naturales de la estructura libre
29
Tabla 2.2: Frecuencias naturales de la estructura empotrada
30
Tabla 3.1: Propiedades modales del elemento 1, dirección X
54
Tabla 3.2: Parámetros modales de la estructura libre
56
Tabla 3.3: P a r G e t r o s modales de la estructura empotrada
58
Tabla 4.1: Frecuencias naturales de la estructura libre
62
Tabla 4.2: Frecuencias naturales de 1a.estructura empotrada
65
Tabla 4.3: Frecuencias naturales de los modelos por elementos finitos de la
estructura
70
I
. .
Pág.
v
SirnbolGgia
Simbología
Cimbolo
Significado
d
amortiguamiento histerético
c,
amortiguamiento modal
C
amortiguamiento viscoso
FEA
análisis por elementos finitos
e
base de logaritmos naturales
coeficiente de amortiguamiento
conjugado complejo
constante modal r-ésima de H ( w )
constantes
constantes
constantes
densidad de masa [kg/m3]
determinante
dirección' del vector gradiente
ejes de coordenadas cartesianas
energia disipada por ciclo de oscilación
factor de amortiguamiento viscoso del modo r-ésimo
factor de amplificación
fase de la constante modal
forma modal correspondiente ai modo r-ésimo
forma modal del modo r-ésimo con normalización de masa
frecuencia de .vibración [rad/s, Hz]
frecuencia natural del modo r-ésimo [rad/s, Hz]
frecuencia natural lineal del modo r-ésimo
frecuencia natural no amortiguada [rad/s, Hz]
función de errof
Pág. \'i
e;
función de error modificada
función de error elevada
cuadrado
función de receptancia
función de respuesta a la frecuencia analítica
función de respuesta a la frecuencia experimental
función de respuesta a la frecuencia
funciones de respuesta a la frecuencia
gravedad [m/sZ]
matriz
matriz de amortiguamiento
'matriz de formas modales con normalización de masa
matriz de masa
matriz de rigidez
matriz de valores propios
matriz de vectores propios
matriz identidad
111,
masa modal
s1so
medición de referencia única
RFPM
método polinomial de fracciones racionales
G
módulo de elasticidad a cortante [Pa]
E
módulo de Young [Pa]
F
modo flexionante
R
modo rígido
T
modo torsional
norma de un vector
N
número de grados de libertad, número de modos de vibración
p,
polo r-ésimo de H ( w )
A,B
procesos en diagrama de flujo
w?,
r-ésimo valor propio
razón de la frecuencia, ángulo [rad, grado-]
relación de Poisson
residuo r-esimo de H ( u )
rigidez modal
sistema de multiples grados de libertad
sistema de u n grado de libertad
tiempo [seg]
transformada de Fourier de u n a fuerza de entrada
transformada de Fourier de u n a respuesta de salida
transformada rápida de Fourier
transpuesta de
[]
variable de Laplace
vector de aceleraciones independientes del tiempo
vector de aceleraciones que varían con el tiempo
vector de desplazamientos independientes del tiempo
vector de desplazamientos que varían con el tiempo
vector de error
vector de fuerzas que varían con el tiempo
vector de velocidades que varían con el tiempo
vector gradiente
vector gradiente con respecto a { u }
vector gradiente con respecto a {b}
- 1
J
.
-
~
1 , índice correspondiente a u n a frecuencia u especifica
l??scngcion del problema
Capítulo 1
D E S C R I P C I ~ NDEL
PROBLEMA
8%
1 . 1 INTRODUCCI&N
La vibración mecánica es u n fenómeno causado por la interacción entre las
propiedades inerciales y elásticas de los materiales dentro de u n a estructura,
máquina, sistema mecánico o unión mecánica. La vibración puede causar o
contribuir a u n a variedad amplia de problemas, como por ejemplo: incomodidad
para el ser humano, ruido excesivo, incapacidad para mantener tolerancias en la
posición de herramientas, fatiga prematura, o la ruptura inesperada
:
Existen varios factores que contribuyen ai incremento en los problemas
relacionados con la vibración. Por ejemplo, los diseños de las estructuras y sus
componentes apuntan hacia la reducción de los márgenes de seguridad y el uso
de componentes con menos masa, que influyen. directamente sobre las
frekuencias naturales del sistema mecánico. Las estructuras, ahora más ligeras,
es&
propensas a fatiga mas rápidamente que las estructuras más pesadas.
Aunado a esto, los cambios en los métodos de fabricación también contribuyen a
u n incremento general de los niveles de vibración. Por ejemplo, las uniones
atornilladas, que poseen amortiguamiento por fricción, son reemplazadas por
soldaduras o por adhesivos con propiedades disipadoras de energías muy
pequenas. En contraparte, otra tendencia paralela es la de minimizar el efecto de
las vibraciones y el ruido sobre los seres humanos.
Por las razones mencionadas, que solamente representan u n a parte del
enorme campo de problemas relacionados con la vibración en las estructuras y
sistemas mecánicos, el comportamiento d i n h i c o de las estructuras se h a
.
investigado durante muchos años y es tema de estudio continuo. Prácticamente,
Pag. 1
Descripción del problema
un nuevo diseño o rediseño de u n sistema mecánico requiere un andisis
dinámico de su comportamiento tanto numérico como experimental o mixto. LOS
tipos de construcciones que provocan interés en términos de su comportamiento
dinámico son muy variados, por ejemplo: edificios, puentes, presas y armaduras
'requieren ser investigados con particular atención sobre cómo se comportarían
bajo condiciones de temblores, viento, impacto inesperado, etc. Los aviones
requieren de un buen estudio de su comportamiento dinámico para proveer u n
diseño óptimo; otras estructuras de interes incluyen automotores, etc. Se puede
continuar la lista con más ejemplos, pero es importante mencionar que el
comportamiento dinámico de estructuras y sistemas mecánicos e s objeto de
investigación en cualquier industria, desde ligera a pesada, como: mecánica,
robótica, electrónica, química, alimenticia, biotecnologia y medicina. Lo anterior
subraya la importancia e interés del estudio del comportamiento dinámico de
cualquier sistema mecánico.
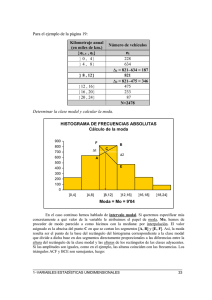
En la figura 1.1 s e presenta u n ejemplo clásico de la respuesta, no deseada,
del puente Tacoma a la vibración causada por la excitación del viento. Esta
vibración causó que el puente se colapsara a causa de la fatiga en los materiales
con que estaba construido.
Figura I . I: Fotografía del modo torsional d e vibración del puente Tacoma causado por la
excitación del viento (Tacoma narrows bridge, 2001).
Aceptando la necesidad de estudiar la -vibración mecánica, se vuelve
necesario considerar los diferentes métodos que s e utilizan para la identificación
de los parámetros dinámicos de estructuras y sistemas mecánicos. En la
actualidad, los métodos numéricos y experimentales s e utilizan de manera
extendida por su facilidad de aplicación y uso para la predicción y el diagnóstico.
Particularmente, se han destacado dos métodos para el cálculo de los parámetros
.
dinámicos de los sistemas mecánicos. El primero, e s u n análisis numérico del
Pag. 2
'
Descripción del problema
sistema mecánico por. el método de elementos finitos. Esta técnica se ha
establecido firmemente como un método numérico para la solución de problemas
e:státicos y dinámicos de ingeniería en general. El segundo método es el análisis
modal. Este método se compone 'de dos etapas: la medición experimental y el
ajuste de las curvas obtenidas a partir de los datos experimentales mediante u n
modelo matemático. En este método, la estructura o sistema real es excitada y se
realizan las mediciones correspondientes a la respuesta de ésta, para calcular SUS
características dinámicas,
Sin embargo, el método de análisis modal no ha sido desarrollado con el fin
de reemplazar al análisis teórico, sino que ambos pueden complementarse
mutuamente.
, Esto trae como consecuencia que los ingenieros modernos deban saber
como modelar, analizar y experimentar. Estas actividades implican que se
obtendrán dos conjuntos de dato's, estos son: datos numéricos y datos
experimentales. La situación ideal sería que los dos conjuntos compaginaran, de
manera que el análisis modal y el análisis por elementos finitos pudieran coexistir
y complementarse uno a otro. Sin embargo, la incertidumbre esta presente en
ambos métodos.
Una estructura es u n sistema continuo y teóricamente es necesario u n
número infinito de coordenadas para especificar la posición de cada punto en la
estructura y de aquí puede decirse que ésta tiene u n número infinito de grados de
libertad. Las características vibratorias de la estructura deberían entonces incluir
u n número infinito de modos de vibración y cubrir el 'intervalo de frecuencia
activo desde cero hasta el infinito. Sin embargo, para la mayoría de las
aplicaciones prácticas, sólo u n cierto intervalo de frecuencias es de mayor interés
.I
y sólo aquellas propiedades que caen dentro de este intervalo son las estudiadas.
Para tal caso, sólo se busca u n cierto número de modos de vibración y, por tanto,
es factible representar el sistema continuo mediante u n modelo aproximado, esto
es: u n modelo discreto. El método de elementos finitos d a una aproximación a la
estructura continua real con u n modelo de número finito de elementos, de formas
y tamaíios definidos que poseen determinado número de grados de libertad, y
consecuentemente nunca sera una representación perfecta de esa estru.ctura
pero aproxima de forma suficiente la respuesta dinámica del objeto analizado.
Pag. 3
*
Descripcion del problema
Por otro lado, el andisis modal también. tiene sus errores asociados, que
involucran la forma con que se recoge la información y posteriormente se analiza.
p
.
Además, existen dos limitaciones insuperables con los métodos experimentales.
La primera de éstas es el hecho de que, generalmente, no es posible medir en
todos los nodos o grados de libertad requeridos. La segunda limitación es que se
obtiene u n modelo incompleto, es decir, el número de grados de libertad excede al
número de modos medidos. A pesar de esto, no se puede pasar por alto que las
mediciones experimentales ofrecen la representación mas precisa de la estructura
puesto que tratan con el objeto de estudio real. Así que, la experimentación da la
mejor información, casi siempre incompleta, mientras que el análisis teórico da
u n esquema completo aproximado. Por tanto, es prudente tratar de extraer las
mejores caracteristicas de ambas aproximaciones.
En años recientes, en Cenidet se han realizado diversas investigaciones
teóricas, experimentales o mixtas sobre el comportamiento dinámico de vigas
sometidas a cargas de impacto y / o amortiguamiento por. fricción.. Algunos de
estos trabajos han incluido mediciones experimentales para obtener información.
Los objetos en estudio se han sujetado a una estructura, disefiada para dicho
propósito, donde se preparan los experimentos relacionados con el estudio de
impacto y amortiguamiento por fricción en sistemas mecánicos vibratorios. Por
tal motivo, uno de los propósitos principales de investigación en esta tesis es
conocer el comportamiento dinámico de la estructura que se u s a para pruebas de
!I
vibración con la finalidad de establecer los intervalos de excitación en los que
SU
respuesta es mínima y, por tanto, no tenga influencia en las mediciones
obtenidas de los experimentos realizados sobre ella.
Para llevar a cabo la tarea de conocer el comportamiento dinámico de la
,
estructura, se realizó una identificación experimental de ella con la aplicación del.
análisis modal. En la primera etapa del análisis modal, se utilizó la técnica del
martillo de impacto en conjunto con el tipo de medición de referencia única para
extraer las funciones de receptancia experimentales. En la segunda etapa se
desarrolló u n algoritmo y en la base de esto, el programa MEPFRA1 que extrae los
parámetros modales de estructuras y sistemas mecánicos a partir de las
funciones de receptancia experimentales.
Pag. 4
.
Descripción del problema
paralelamente, se realizó un modelado numérico de la estructura por
elementos finitos utilizando ALGOR v.12. LOS propósitos de este modelado
numérico son: a) validar los resultados experimentales obtenidos por el programa
MEPFRA1 con los resultados numéricos, b) que el modelo numérico sirva como
base para el posible rediserio de la estructura, que permita ampliar s u intervalo
de trabajo.
A continuación se presenta la estructura de esta tesis, con u n a breve
descripción de los capítulos.
En el capítulo uno s e presenta la introducción, el objetivo general y los
alcances de esta investigación. Además, se presenta el estado del arte relacionado
directamente con la investigación.
En el capitulo dos se presentan las bases teóricas del análisis modal y se
detalla el desarrollo del modelado numérico de l a estructura por el método de
elementos. finitos para dos condiciones de frontera diferentes. Finalmente, se
presentan los resultados obtenidos de la simulación numérica de la estructura
para pruebas de vibración.
En el capítulo tres se muestra la metodología para el proceso de preparación
y desarrollo del análisis modal y el posterior ajuste de curvas reaiizado a los datos
experimentales mediante el uso del programa MEPFRA1 para obtener la
estimación de 1os.parámetros modales de la estructura.
En el capítulo cuatro s e analizan y comparan los resultados numéricos y
experimentales y s e validan los resultados del programa MEPFRA1. Además, se
proponen opciones de redisefio de la estructura para mejorar sus propiedades
dinámicas.
Finalmente, en el capítulo cinco se presentan las conclusiones de ésta
investigación con las recomendaciones para trabajos futuros'.
1.2 OBJETNO GENERAL
El propósito principal de esta investigación es la implementación de u n
método para la identificación dinámica de estructuras y sistemas mecánicos que,
en la base del análisis modal, permita caracterizar numérica y experimentalmente
su comportamiento dinámico. Además, aplicar y verificar el método propuesto
Pag. 5
I,
Descnpcion del problema
sobre la estructura para pruebas de vibración del laboratorio de ingeniería
mecánica del Cenidet.
1.3 ALCANCES
Aplicar el método de elementos finitos c o n el uso de ALGOR v.12 (software
comercial existente en el departamento de ingeniería mecánica del Cenidet)
para modelar u n a estructura que se utiliza para pruebas de vibración.
Obtener del análisis numérico las frecuencias naturales y formas modales de
la estructura dentro de un intervalo de OHz a 200Hz, que es el intervalo de
interés en esta investigación. Además, en la base del modelo discreto de la
estructura, proponer ejemplos del rediseño de ésta para cambiar sus
parámetros modales.
Obtener archivos de las funciones de respuesta a . l a frecuencia (FRF's), como
resultado del experimento modal realizado sobre la estructura utilizando la
técnica del martillo de impacto en combinación con el tipo de medición de
referencia unica.
Analizar las funciones' de receptancia experimentales por medio de u n
programa de cómputo elaborado en Matlab v.5.1, que realiza el ajuste de las
curvas FRF's utilizando el método polinomial de fracciones racionales
(Richardson and Formenti, 1982) para identificar los parámetros modales de
'!
,
la estructura. Las frecuencias naturales, factores de amortiguamiento modal y
.''
formas modales de la estructura serán calculados dentro del intervalo de
interés de OHz a 200Hz.
Describir la metodología seguida tanto para el proceso de modelado numérico
'
de la estructura como para desarrollar el análisis modal.
'
Implementar un sistema para la identificación dinámica de estructuras y
sistemas mecánicos, hasta ahora inexistente en cenidet, para extraer
parámetros modales mediante el método polinomid de fracciones racionales.
1.4 E S T A D O DEL ARTE
La existencia de información relacionada con el desarrollo y aplicación del
método de elementos finitos y el análisis modal es m u y amplia. Por esta razón, en
Pag. 6
.I\
1
Descripción del problema
.~
esta sección se presentan sólo las pubiicaciones escogidas que apoyaron
directamente al desarrollo del presente trabajo de tesis. '
1.4.1MÉTODO DE ELEMENTOS FINITOS
Este método fue concebido originalmente por Turner, Clough, Martin y Topp
en 1956 (Meirovitch, 1997), como u n procedimiento para el análisis estático de
esfuerzos de estructuras en ingeniería civil. Sin embargo, rápidamente se
extendió al análisis estático y dinámico en otras áreas de la ingeniería. El
crecimiento en las áreas de aplicación de este método se debió al desarrollo de los
sistemas de computación que permitieron resolver miles de ecuaciones
algebraicas. Amplia descripción del método se puede encontrar en varios libros,
pero los más representativos son: Zienkiewicz y Taylor (1994) y Huebner y otros
(1995).
Recientemente, se han presentado libros acerca del método de elementos
finitos con aplicación directa de u n software' comercial 'dado. U n a publicación
referente al modelado con el método del elemento finito fue la presentada por
Spyrakos (1995), donde incluye ejemplos con ALGOR. Spyrakos (1995) presenta
una descripción general del método, así como los fundamentos para el modelado
y ,metodología del uso de ALGOR. Entre los temas que presenta esta publicación
están: esfuerzos, deformaciones, criterios de . falla, análisis dinámico con
/I
elementos finitos, andisis estático y dinámico con ejemplos y uso del paquete
ALGOR. Además se presentan ejemplos relacionados con el análisis modal. Esta
publicación sirvió como referencia para el uso del paquete ALGOR v . 1 2 en la
presente investigación.
1 .b.2 ANALISIS MODAL
Los principios del análisis modal comenzaron con u n estudio, realizado por
Kennedy y Pancu en 1947 (Ewins, 1995), orientado hacia la medición de los
parámetros modales de estructuras de aviones. Los métodos descritos ahí,
tuvieron aplicación en la determinación precisa de las frecuencias naturales y
niveles de amortiguamiento de estas estructuras. Con la llegada de las minicomputadoras digitales y la transformada rápida de Fourier (FFT), en los aíios
196O's, nació la nueva era del anáiisis modal. Desde entonces se han
.
.
.
Pag.7
Descnpción del problema
dpsarrollado varias técnicas para la aplicación de este análisis y existe amplia
variedad de literatura que presenta sus fundamentos, tales como: Allemang y
Brown (1993),Ewjns (19951, Rao (1995)y De Silva (1999).
Generalmente, el análisis modal se divide en dos etapas, que son: la
medición de la estructura o sistema re-d y la estimación de los parámetros
modales. La metodología seguida en esta investigación para la realización de la
medición experimental se presenta en la sección 3.2.2 y está basada en la
metodología descrita por el manual de usuario del analizador de espectros:
11
Hewlett Packard (HP) 3566A/3567A “Getting Started” (1992).
Respecto de la estimación de los parámetros modales, se han publicado
numerosas investigaciones. Sin embargo, a continuación se presentan sólo las
investigaciones realizadas acerca del método utilizado en esta tesis, esto es: el
método polinomial de fracciones racionales (RFPM).
Los primeros investigadores que presentaron el método polinomial de
’
fracciones racionales, para la estimación de parámetros modales, fueron
Richardson y Formenti (1982). En esta investigación se introdujo una nueva
formulación que resolvía los problemas, asociados con el mal condicionamiento
de las ecuaciones, que resultaban’ al aplicar este método. La mayor parte de la
discusión presentada en este artículo se centró en la reformulación de las
v
ecuaciones de solución en términos de polinomios ortogonales y la generación de
los mismos polinomios. Además, fueron presentados ejemplos del uso del método
y se discutieron los problemas que comúnmente enfrentan los sistemas de
estimación de parámetros modales, como son: ruido en la medición, la cantidad
de resolución en la frecuencia y los efectos de las resonancias que caen fuera del
intervalo de análisis. Se concluyó que este método es lo suficientemente rápido y
preciso, además, no es iterativo y trabaja directamente con las FRF’s en el
dominio de la frecuencia. Por tanto, no se ve afectado si son utilizadas mediciones
con truncamiento. Por otro lado, como cualquier otro método, éste disminuye su
precisión cuando se trabaja con mediciones que contienen ruido excesivo,
distorsión, o que tienen baja resolución en la frecuencia.^ Esta investigación
.
constituye la base para el proceso de desarrollo del programa de cómputo en esta
tesis.
Pag. 8
’
li
z
!1
!I
I:
/I
..
Más tarde, Lee y Richardson (1992) presentaron dos métodos de ajuste de
curvas diferentes, uno para u n solo modo a la vez (SDOF)y el otro para múltiples
modos (MDOF) por el método polinomial d~efracciones racionales para evaluar su
I*
desempeño al ajustar u n total de doce FRF’s que fueron sintetizadas usando los
‘i
p.&%netros de tres modos de ,vibración. En este artículo se discutieron los tipos
‘1
d? ajustadores de curvas: locales de u n solo grado de libertad, locales de
‘/I,
.
multiples grados de libertad, globaies y de referencia múltiple. Además, fueron
I/
dkscritas las diferentes fuentes de error que pueden ocurrir cuando se aplica
ii
cualquier procedimiento de estimación de parámetros. En particular, Lee y
li
Richardson (1992) mencionaron que cuando se ajustan las curvas de un
il .
conjunto de mediciones de FRF’s, los problemas que tienen que resolverse son los
!i
siguientes: resolución insuficiente de la frecuencia, distorsión de la medición,
!I
;Lido en la medición y la determinación del número de modos o tamaño del
i
modelo. Los doce casos presentados contenían algunos de estos problemas,
!t
<demás unos contenían densidad modal alta y otros baja. Los mejores resultados,
I<I
para la mayoría de los casos, ,se obtuvieron del método lock de varios grados de
’/
libertad (el método polinomid.de fracciones racionales). Existieron dos casos, que
$resentaban gran densidad mpdal o quizás raíces repetidas, en los que el método
&odujo’ resultados
con errores considerables.
Lee y Richardson
(1992)
cbncluyeron que para estos casos’se necesitaba un método global o uno de
!<
,
.
rkferencia múltiple para obtener resultados exitosos.
;I
Xu (1997)realizó u n análisis de los sistemas de identificación de parámetros
jj
modales existentes. En su artículo menciona que generalmente los métodos de
i
identificación de parámetros modales que trabajan en el dominio de la frecuencia
I!
s,on excelentes para el análisis en anchos de banda reducidos, típicamente con
un límite de 10 modos en la mayoría de los algoritmos más populares. Por tanto,
el autor presentó u n estudio en él cual hizo uso del método introducido por
‘li
Richardson y Formenti (1982), al cuál implementó el concepto de “matriz
ortogonal acompañante” para mejorar el uso de los polinomios ortogonales de
I
/I
Forsythe. Además, presentó un ejemplo experimental con el uso del método
implementado, el cual fue capaz de calcular la presencia de 56 modos con
!I
precisión considerable. También concluyó, al igual que Richardson y Formenti,
‘que es posible sobrestimar el orden del modelo de las FRF’s, puesto que hacer
i
!!
ll
1
Pag.9
Descripción del problema
esto sólo produce la aparición de. modos qomputacionaies cuyo significado es
nulo y su influencia sobre los modos verdaderos es despreciable.
Por último, Schwarz y Richardson (1999) presentaron u n articulo donde
revisan los temas princip-es
asociados con el' análisis modal experimental,
incluyendo la realización .de mediciones de curvas de respuesta a la frecuencia
con u n analizador FFT y la estimación de parámetros modales a partir de u n
conjunto de FRF's. Entre los temas revisados están:)los modos y tipos de modos
de vibración, forma flexionante operante, mediciones de FRF's, prueba de
estructuras reales, cálculo de u n a FRF con u n analizador FFT, elementos
necesarios para realizar la prueba modal utilizando la técnica de martillo de
impacto o con un excitador y la extracción de parámetros modales a partir del
ajuste de las curvas FRF's con métodos como: el método exponencial complejo y
el método polinomial de fracciones racionales.
1.4.3 MhTODO DE ELEMENTOS FINITOS Y ANALISIS MODAL
La aplicación tanto del método de elementos finitos como del análisis modal
para identificar las propiedades dinámicas de las estructuras y sistemas.
mecánicos h a adquirido gran' importancia en los últimos d o s . La tendencia
'creciente es la correlación o verificación del modelo por medio de los resultados
experimentales obtenidos del análisis modal Correlacionar los resultados v a más
allá de la simple comparación de las propiedades modales resultantes de ambos
métodos, es decir, se trata de la combinación cuantitativa de ambos resultados
para identificar especificamente las causas de las discrepancias entre las
propiedades predichas por el modelo y las medidas en el experimento modal.
Enseguida se presentan algunas investigaciones que combinan ambos
métodos
y
que por la metodologia planteada tanto para el modelado numérico
como para el experimento modal constituyen u n a guía para esta investigación.
Por ejemplo, Ramsey (1983) en su investigación discutió la forma en que son
utilizados los métodos analíticos y experimentales para resolver problemas de
vibración y ruido, y la importancia de usar los parámetros modales para vincular
el análisis y la experimentación. Ramsey (1983) mencionó algunas aplicaciones
del análisis modal, como son: la verificación de' modelos analíticos, la localización
de problemas de ruido y vibración y la evaluación de cambios en los parámetros
Pag. IO
Descripción del problema
.
modales. También se mencionó que e&en
.
cuatro pasos para resolver los
problemas de ruido y vibración, que son los' siguientes: caracterizar el problema,
identificar las resonancias estructurales, realizar un anáiisis modal para obtener
las formas modales de cada u n a de las resonancias de interés y realizar la
modificación de la estructura (de ser necesaria) añadiendo amortiguamiento o
cambiando la frecuencia a u n a frecuencia más alta o más baja para evitar la
excitación. Finalmente, el autor presentó un ejemplo donde combinó el anáiisis
por elementos finitos (FEA) y el análisis modal para lograr la respuesta deseada
sobre una estructura. El modelo de la estructura fue realizado con un programa
de elementos finitos llamado FESDEC usando un modelo de elementos finitos
tipo placa y la estructura fue probada usando la técnica de martillo de impacto.
Los resultados demostraron que en ocasiones el modelo por elementos finitos fue
incapaz de predecir correctamente las formas modales con respecto a las
obtenidas a~partir del experimento, aun cuando las frecuencias predichas
estaban muy cercanas a los valores experimentales.
Salane y Baldwin (1990) realizaron un estudio de fatiga a un puente para
identificar los cambios en las propiedades modales de la sección de prueba. Para
esto se realizó una prueba de fatiga de cuatro millones de ciclos, de la que se
obtuvieron las formas modales y factores de amortiguamiento. Los factores de
ahortiguamiento variaron en un intervalo de 1.09% a 0.53%. Además, se realizó
un modelo de elementos finitos de la sección probada con u n software llamado
GTSTRUDL. La cubierta de concreto fue modelada como elementos placa y los
soportes como elementos viga. Con el programa se calcularon las frecuencias de
vibración y vibración forzada del modelo de elementos finitos, además se analizó
su comportamiento estático. Según los autores, algunas discrepancias existentes
entre el modelo de elementos finitos y los valores experimentales se debieron al
comportamiento errático de la sección de prueba a respuestas con amplitudes
grandes, siendo la mayor discrepancia en la frecuencia de un 13%. Salane y
Baldwin (1990) concluyeron que el deterioro causa cambios en las propiedades de
rigidez y que estos cambios son evidentes en la información experimental
obtenida.
Idichandy y Ganapathy (1990) propusieron usar un sistema instrumentado
de monitoreo basado en la respuesta dinámica de u n a plataforma de extracción
Pag. 11
8 2 - 06-77
Descnpcióii 2eL p r o t i k m
de petróleo. El método se basa i n el hecho de que cualquier estructura tiene
modos naturales de vibración que son propiedades características de la
estructura,y que no cambian a menos que haya cambios en la distribución de su
masa o rigidez. Se formuló un modelo por elementos finitos de la plataforma
1
idealizando los miembros como elementos viga en tres dimensiones con seis
grados de libertad en cada nodo. Los cambios en la masa de la cubierta que
afectaron a la estructura como un todo resultaron en cambios en las frecuencias
naturales de todos los modos, sin embargo no afectaron considerablemente las
formas modales. Uno de los objetivos principales de ese estudio fue la verificación
experimental de los resultados analíticos. Los resultados entre el análisis y el
'I
experimento fueron muy cercanos, con una diferencia de un lo%, como máximo,
en las frecuencias . naturales. Idichandy y Ganapathy concluyeron que la
influencia de los daños estructurales en las formas modales fue notable en todos
los casos. La forma modal se desviaba de la forma básica y su magnitud dependía
de la severidad del daño.
Sanders y otros (1992) desarrollaron una teoría para detectar, localizar y
cuantificar daño en estructuras compuestas a partir de los cambios en los
pqámetros modales medidos en estructuras hechas de compuestos de fibra
reforzada. En esta investigación fueron presentados ejemplos numéricos que
involucraban daño en vigas, compuestas (en voladizo) para demostrar la
capacidad de la teoría para predecir la localización exacta y la severidad del daño.
Paia proveer de evidencia experimental que sustentara la teoría, se realizaron
pruebas modales y m e c h i c a s en vigas compuestas en estado sin daño y tres
ad:icionales con daño progresivo. Para el desarrollo numérico utilizaron un
modelo discreto con 40 elementos finitos tipo viga y con un total de 80 grados de
libertad. Los procedimientos experimentales usados en este artículo se dividieron
en la caracterización de las propiedades de los materiales, la medición de la
degradación de rigidez y la extracción de los parámetros modales. La prueba
modal se realizó utilizando la técnica de martillo de impacto. Las FRF's obtenidas
fÜeron analizadas 'por u n software de análisis modal llamado SMS, del cual se
obtuvieron las' frecuencias naturales y los factores de amortiguamiento del
sistema real. Se encontró que la configuración experimental no fue adecuada
para determinar las formas modales. Fue atribuida la baja calidad.de las formas
Pag. 12
Descnpcibr. dc!pro; lema
modales a la falta de consistencia al impactar el mismo punto designadc ex la
viga, en la misma dirección y con la misma fuerza. A pesar de esto, encontraron
buen acuerdo entre los valores medidos y los valores predichos por la teoría
propuesta.
En otra investigación, Singal y otros (1992) presentaron los resultados de
varias pruebas experimentales realizadas a dos placas para verificar el método de
superposición y las capacidades y precisión de análisis del software Analdyne- 1.
Lbs experimentos se realizaron a dos placas distintas con cinco configuraciones
de frontera diferentes aplicadas a cada una de ellas. El propósito del estudio
experimental fue la verificación de los modelos al establecer las frecuencias
resonantes y las formas modales asociadas para cada prueba. La técnica
utilizada para la prueba modal fue la de martillo de impacto. Se realizaron
mediciones en cincuenta y cinco puntos diferentes de las placas. Para cada punto
de medición se obtuvo una función de respuesta a la frecuencia como resultado
d e u n promedio de solo cinco impactos, esto a causa de la gran cantidad de
puntos medidos. Se presentaron resultados analíticos y experimentales para los
primeros seis modos y estos muestran muy buena concordancia entre la teoría y
la experimentación tanto para las frecuencias naturales como para las formas
modales. En general, las discrepancias no excedieron el cinco por ciento. Los
autores atribuyeron las diferencias a lo siguiente: pequeños esfuerzos residuales
en las placas, pequeñas diferencias en la geometría respecto del modelo
idealizado, o que quizás no se alcanzaron las condiciones de frontera idealizadas,
o más aun, que las propiedades de las placas (espesor, densidad, módulo de
Young, etc.) hayan diferido ligeramente respecto de las empleadas para los
cálculos analíticos.
Mitri y Morassi (1998) estudiaron el efecto, sobre los modos y las
frecuencias de vibración, causado por el daño en una estructura construida por
barras planas de acero. Se realizaron experimentos sobre la estructura para
extraer sus parámetros modales. Un experimento se realizó sobre la estructura
sin
daño.
Además,
se
realizaron
ocho
experimentos
con
diferentes
configuraciones de daño. El daño fue simulado soltando una restricción en el
extremo de ciertos miembros. Los autores elaboraron modelos de elementos
finitos tanto de la estructura sin daño como para los ocho casos de falla. El
Pag. 13
L-)Pscr:~>cióli
del problema
primer modelo de elementos finitos para la estructura sin dG.0 mostró n s ser
una buena aproximación, ya que el error menor era del 13%. Mitri y Morassi
(1998) dedujeron que los errores se debían a una descripción incorrecta de las
condiciones de restricción entre los miembros, a efectos locales por fricción en las
u,niones y finalmente por la incorrecta descripción de la rigidez de las barras. El
modelo fue cambiado por u n a aproximación subestructural. Sin embargo, los
resultados de este nuevo modelo no fueron buenos. Tan solo u n modo dio u n
error aceptable de 7% y las formas modales, excepto la primera, también eran
considerablemente diferentes a las medidas. Esta vez, se concluyó que la
diferencia se debía a una mezcla de movimientos en el plano y fuera de él,
debidos a las excentricidades inevitables en la construcción y a imperfecciones en
el ensamble. El modeio analítico no podía describir este tipo de movimientos. Del
añálisis modal se notó, .con respecto a las frecuencias naturales, que las
estimaciones de cada nodo demostraron repetibilidad puesto que solo se obtuvo
una desviación máxima del valor promedio de 0.2Hz para la mayoría de los nodos
medidos, excepto para algunos otros. Por último, fue mencionado que este tipo de
desacuerdo es frecuente en las pruebas dinámicas de sistemas complejos y que
en la interpretación de las pruebas se consideran u n promedio de los valores de
frecuencia deducidos a partir de las mediciones en los diferentes nodos.
1!4.4 INVESTIGACIOh!ES EN CEMDET
Enseguida se presenta una breve descripción de las investigaciones
re’alizadas en Cenidet que han utilizado la estructura para pruebas de vibración
del laboratorio de ingeniería mecánica para las pruebas experimentales.
En la investigación realizada por Sotelo (1995) se disefió y construyó la
estructura para pruebas de vibración que se analiza en la presente investigación.
Sotelo presentó el estudio del fenómeno de impacto en vigas, sometidas a
vibración transversal, producido por una restricción impuesta en algún punto de
la longitud de la viga. Para el estudio de este fenómeno se realizó u n análisis
numérico con el método del elemento finito, mediante un programa realizado por
Sbedowicz y Sotelo (1995) en Fortran 77. Se realizó la verificación experimental
del modelo, para lo cual se montó la viga en la estructura para pruebas de
vibración y se simularon las condiciones de frontera y la fuerza de excitación. En
Pag. 14
Desciipcion delproblema
la prueba experimental, la restricción tenia u n claro de 2mm ccn respecto a la
viga. Se sujetó la viga en un extremo (empotrada) y en el otro quedó libre. La
excitación impuesta a la viga. fue producida por u n excitador mecánico qu,e fue
unido al extremo libre de la viga, y la fuerza de excitación fue de 4 N a una
frecuencia de 12.9Hz. La fuerza de impacto se midió mediante u n sensor de
fuerza, de diseño propio, que se encontraba en el tope o restricción. Se concluyó
que el impacto produce fuerzas muy grandes en periodos de tiempo muy cortos
que, además, inducen ondas de alta frecuencia y que ello depende principalmente
de la ubicación de la restricción y de los materiales que entran en contacto
durante el impacto. En este estudio no se incluyó el análisis de los efectos de
amortiguamiento; y los resultados de fuerza de impacto teóricos y experimentales
tuvieron una diferencia de 5%,a 11%.
,~
,
.
La investigación anterior representa el comienzo del estudio del fenómeno de
impacto en vigas en Cenidet, a la cual han seguido otras investigaciones
relacionadas. con el mismo fenómeno donde se experimenta con diferentes tipos
de topes o restricciones. El tipo de contacto obtenido h a sido lineal, puntual y
pl.ano; además se han utilizado diferentes materiales para la construcción de los
topes. Dentro de las investigaciones relacionadas con este tópico se encuentran
los trabajos realizados por: Szwedowicz (1997), Cortés (1997), Diego (1998),
Szwedowicz (1998), Szwedowicz y otros (1998), Martínez (1999), Szwedowicz y
o k o s (1999), Martinez y otros (2000) y Szwedowicz (2001). Es importante hacer
notar que en la mayoría de estas investigaciones se utilizaron frecuencias de
excitación desde 9Hz hasta 13.5Hz, sin embargo en una de las investigaciones se
excitó con u n intervalo de frecuencia desde 4% hasta 30Hz (Martinez, 1999). En
esta investigación se hace notar que cerca de la zona de los 30Hz existía u n salto
en la frecuencia provocando que no se tuvieran lecturas en esa zona. Martínez
(1999) consideró que este podría ser provocado por algún parámetro del sistema,
sin precisar la causa. De aquí que surja la necesidad de verificar el
comportamiento dinámico de la estructura para pruebas de vibración, de manera
que pueda asegurarse que su comportamiento dinámico es independiente al
comportamiento del sistema en estudio para una excitación dada.
Por otro lado, se observa en estas investigaciones que los valores de las
frecuencias naturales de las vigas fueron tomados directamente de los picos
Pag. 15
*
Descnpcioii del problema
observados en la magnitud d e la función dc respuesta a la frecuencia obtenida
1)
del analizador de espectros. Por tanto, estos valores corresponden a las
frecuencias naturales amortiguadas y no a las frecuencias naturales resonantes
de las vigas. En sentido estricto, las frecuencias de excitación utilizadas en estas
investigaciones no eran las frecuencias necesarias para llevar al sistema al estado
de resonancia. Sin embargo, se consideró que los elementos simples utilizados en
estas investigaciones (vigas de sección constante) poseen amortiguamiento muy
pequeño, por lo que las frecuencias naturales resonantes de éstas tienen valores
muy cercanos a las frecuencias naturales amortiguadas. De lo anterior, se vuelve
necesario poder estimar el amortiguamiento de los sistemas mecánicos y, así,
I1
determinar con mayor precisión las frecuencias naturales resonantes de éstos.
En la presente investigación se implementa un sistema para determinar con
precisión estos parámetros.
Como se ha observado en el estado del arte, es notable el amplio panorama
de aplicación del análisis modal para la solución de problemas relacionados con
el comportamiento dinámico de u n sistema, ya sea para evaluar fallas, fatiga,
condiciones de resonancia, validación de un modelo o simplemente para conocer
la naturaleza del sistema. Por tanto, en esta investigación se hace uso de esta
herramienta para evaluar la estructura para pruebas de vibración. Sin embargo,
su aplicación no se limita solo a las estructuras sino también a los sistemas y
uniones mecánicas o elementos mecánicos. Además, los resultados obtenidos
permiten el rediseño o modificación de las estructuras o sistemas mecánicos.
Pag. 16
’
Modelado por elerneritos finitos
Capítulo 2
MODELADO POR ELEMENTOS
FINTOS
En este capítulo son presentados los fundamentos para el análisis modal y
la descripción del modelado numérico de la estructura. Los conceptos básicos
sobre el análisis de vibración son encontrados ampliamente en las publicaciones
hechas por: Thomson (1982),Den Hartog (1984),Rao (1995)y Meirovitch (1997),
por mencionar algunos.
2.1 FUNDAMENTOS T E ~ R I C O S
1;
En la realizacion de un análisis de vibración, en general, se encuentran tres
fases: el modelo espacial, el modelo modal y el modelo de respuesta (Ewins,
1995).
El proceso de modelado de la dinámica de un sistema real se comienza con
una descripción de las características fisicas de la estructura, en terminos de sus
dimensiones, m a s a , rigidez y amortiguamiento. A esto se le llama modelo
espacial.
Enseguida, se realiza un análisis modal analítico del modelo espacial que
conduce a una descripción del comportamiento de la estructura como un
conjunto de modos de vibración, y es llamado modelo modal. Esta solución
describe las posibles formas en que la estructura es capaz de vibrar
n p r a l m e n t e , es decir, sin la presencia de alguna fuerza de excitación externa.
Pag. 17
Modelado por elementos finitos
Se defir,e como u n csnjunto de írecuericias naturales con las correspondientes
formas modales de vibración y factores de amortiguamiento modales.
La tercera fase del análisis establece exactamente como vibrará la
estructura bajo condiciones de excitación dadas y, más aun, con qué amplitudes.
Ciertamente, esto dependerá no sólo de las características fisicas propias de la
estructura sino también de la naturaleza y magnitud de la excitación impuesta; a
ekto se le conoce como el modelo de respuesta.
Debido al alcance de esta investigación, en este capítulo se presentan sólo
las dos primeras fases del análisis de vibración, es decir, el modelo espacial y el
modelo modal.
2.1.1 ECUACIdN DE MOVIMIENTO
Se considera que la estructura que se va a analizar en esta investigación
posee amortiguamiento ligero, de manera que todos los modos de vibración
involucrados son reales. Las ecuaciones que gobiernan el movimiento de sistemas
con varios grados de libertad son presentadas ampliamente en la bibliografía,
como por ejemplo: Den Hartog (19841, Ewins (1995), Rao (1995), Meirovitch
(1997). Enseguida se presenta sólo u n a breve descripción de la ecuación de
movimiento.
La ecuación diferencial de segundo orden que describe el comportamiento
dinámico de u n sistema es:
donde:
[MI,
[C] y [ K ] son las matrices N x N de masa, amortiguamiento y rigidez,
respectivamente,
{i
(t)] , {
(f)]i,
velocidades,
{.(I)}
y
desplazamientos
{,f(/)} son los vectores
y
fuerzas
que
N x 1 de aceleraciones,
varían
con
el
tiempo,
respectivamente,
N es el número de grados de libertad del sistema.
Sin embargo, la mayoria de las estructuras y sistemas mecánicos
encontrados en la práctica poseen amortiguamiento de diferente tipo y magnitud.
Pag. 18
Modelado por elementos finitos
.
Por esta r z c 2 , en la ecuación (2.0)es posible despreciar el amortiguamiento [C]
con el objetivo de simplificar el análisis del sistema y obtener la primera
aproximación de su comportamiento ,dinámico.
Por tanto, en esta sección se presenta el desarrollo de la ecuación de
movimiento para u n sistema lineal no amortiguado con N grados de libertad. Las
características dinámicas (frecuencias naturales y formas modales) pueden
describirse por u n conjunto de ecuaciones diferenciales de segundo orden, en
forma matricial:
Considerando la solución para vibración libre con el fin de determinar las
propiedades modales naturales o normales, se asume que no existe excitación
sobre el sistema:
if )I = {o)
(2.2)
(I
También, se asume que el desplazamiento tiene la forma:
{x(/)) = {.}e
(2.3)
donde {x} es un vector N x 1 de amplitudes independientes del tiempo. La
expresión de aceleración tiene la siguiente forma:
1,
Sustituyendo las ecuaciones ( 2 . 2 ) , (2.3)y (2.4)dentro de la ecuación (2.1),s e
obtiene:
([KI- w 2 [M]){x}e'"'= {o}
Para la cual, la única solución no trivial es la siguiente:
det [ K ] - w 2
[MI
=O
(2.6)
De la ecuación (2.6) se encuentran N valores de las frecuencias naturales
del sistema no amortiguado, que se puede escribir en la siguiente forma,
m2 :(oT,wi,...,w1,..., u:). Sustituyendo cada una de estas frecuencias en la
ecuación (2.5) da como resultado u n conjunto correspondiente de valores
relativos para {x}, esto es { y } ,, que es llamada la forma modal correspondiente a
esa frecuencia
Pag. 19
Modelado por elemenfosfinilos
La solüción completa puede expresarse
..
en dos matrices N x N (matrices
propias) como:
'I
donde o,'es el r-ésimo valor propio, o el cuadrado de la frecuencia natural,
y { y } , es una descripción de la forma modal correspondiente.
Existen varios procedimientos numéricos, como el método de iteración subespacial (Bathe, 1982),que toman las matrices
[MIy [ K ] del modelo espacial del
sistema y las convierten en dos matrices propias [or] y [ Y ] que constituyen el
modelo modal.
En este punto, es importante notar que la matriz de valores propios es
única, mientras que la matriz de vectores propios .no lo es. Mientras que las
frecuencias naturales son cantidades fijas, las formas modales están sujetas a un
factor de escala indeterminado que no afecta la forma del modo de vibración, sólo
su amplitud.
El
modelo
modal
posee
propiedades
importantes, conocidas como
propiedades de ortogondidad, las cuales se presentan de manera concisa como:
De las cuales: [o:]=
[ni,].' [ k r ] donde rn, y k, son llamadas, respectivamente,
masa y rigidez modales del modo r-ésimo. Puesto que la matriz de vectores
propios está sujeta a u n factor de escala arbitrario, los valores.de rn, y k, no son
únicos y por tanto no es posible referirse a la masa o rigidez modales de un modo
particular. Entre los procesos de normalización o escala existentes, el método de
nohaiizacidn d e masa es ampliamente utilizado y aceptado. Los vectores propios
y tienen la propiedad particular
con normalización de masa se escriben como [O]
que:
14' IMIIQI = I11
(2.9)
(2.10)
La relación entre la formamodd con normalización de masa para el modo résimo,
{+}, , es:
Pag. 20
Modelado por elernentosfifiriitos
(2.11)
Y para su forma más general, {Y},, simplemente es:
[o]
=[.U]l,n;”Z J
(2.12)
2.2 MÉTODO DE ELEMEN’TQS FINITOS
El método de elementos finitos es u n método numérico universal que h a
sido aplicado extensamente para resolver problemas de casi todos los campos de
.análisis de la ingenieria. Los avances en el desarrollo de computadoras más
.poderosas han hecho posible el uso más fácil y eficiente del software de
elementos finitos, en computadoras personales, para la solución de problemas
‘complejos de ingeniería moderna. Los resultados ‘obtenidos con u n análisis de
elementos finitos no son “exactos”. Sin embargo, se puede obtener u n a solución
muy precisa si se utiliza un modelo apropiado.
La principal ‘diferencia entre los métodos clásicos y el método de elementos
finitos es la forma en que consideran el sistema y enseguida el procedimiento de
solución. Los métodos clásicos consideran el sistema como u n continuo cuyo
comportamiento se describe por ecuaciones diferenciales ordinarias o parciales.
Por otro lado, el método de elementos finitos considera la estructura como u n
ensamble de pequeños elementos de tamaño finito y forma definida que
representa u n modelo discreto del problema. Las funciones de forma de los
elementos finitos describen el comportamiento del sistema completo y la solución
del problema se obtiene formulando u n sistema de ecuaciones algebraicas que
pueden ser resueltas con el uso de u n a computadora (Meirovitch, 1997). Los
elementos de tamaño finito y forma definida se llaman elementos finitos. Los
puntos en los que dichos elementos se interconectan se conocen como nodos y el
procedimiento
de selección
del número de elementos finitos se llama
discretización. Si el proceso de discretización se realiza apropiadamente, se puede
hacer que el resultado converja a u n a solución aproximada de la estructura
completa conforme se reducen las dimensiones de los elementos. Durante el
proceso de solución deben satisfacerse, entre los elementos, el equilibrio de
fuerzas en los nodos y la compatibilidad de desplazamientos de manera que la
’
estructura entera se comporte como u n a entidad única.
Pag. 21
‘
Modelado por elementos firii2os
En esta investigación se aplica el método de elementos finitos mediante el
modelado de la estructura para pruebas de vibración utilizando el software
,comercial ALGOR v. 12.
Enseguida se presenta, de forma breve, la metodología para realizar u n
análisis por elementos finitos para resolver problemas estáticos:
1. Modelado de la geometría. El modelo geométrico representa la geometría
del elemento o estructura que se, requiere analizar. Además, en esta etapa se
definen las propiedades de los materiales.
2. Creación de la malla. En la base de la geometría del modelo se discretiza
toda la estructura por medio de elementos finitos. Este paso e s el más crucial,
pues de ello depende la precisión de la solución del problema. Además, se definen
.,
y seleccionan los tipos de elementos finitos que son los más convenientes para el
modelo fisico.
'
3. Aplicar las cargas. En este paso, se provee de las fuerzas aplicadas
e x t e r n g e n t e [cargas concentradas, uniformes, estáticas, transitorias, etc.).
4. Definir las condiciones de frontera. Se definen las condiciones de apoyo y
restricciones de la estructura o sistema que se modela.
Al conjunto de pasos anterior se le conoce como la etapa de pre-
procesamiento para u n análisis por elementos finitos. Esta etapa del proceso
puede realizarse utilizando el pre-procesador de ALGOR v. 12. llamado SuperDraw
/I
111.
5. Solución del sistema de ecuaciones lineales algebraicas. Esta es la etapa
de procesamiento, donde el programa comercial automáticamente ensambla las
matrices de rigidez de los elementos y en esta forma crea una matriz global del
'.
,
sistema. El ensamhlar las' matrices de rigidez de los elementos a u n a matriz
global implica el equilibrio del sistema completo. De acuerdo al tipo de problema
se hallan, mediante métodos iterativos de solución, los desplazamientos nodaies
[método de desplazamientos) o las fuerzas nodales (método de fuerzas), ya que
son los valores desconocidos.
6 . Calcular las incógnitas. Según lo requiera el usuario, el programa puede
calcular los esfuerzos, las reacciones, formas modales, frecuencias naturales u
otra información pertinente.
Pag.22
.
.
.. .
.
~
..
. ~.
.
_ _
.
Modelado por elementosfinitos
7 . Visualización d e resultados. Este paso constituye la tercera etapa de
análisis, llamada pos-procesamiento, que consiste en la visualización de los
resultados. Los pos-procesadores, como el Superview de ALGOR v. 12., ayudan al
usuario a mostrar los resultados en forma grefica, como por ejemplo: gráficas de
:la distribución de esfuerzos, gráficas de desplazamientos, etc.
2.2.1 TIPOS DE ELEMENTOS FINTTOS
Los elementos finitos más comúnmente usados son: barra, viga, elementos
axisimétricos, membrana, placa, cascarón, sólido o ladrillo y elementos de
contacto o gap.
En esta sección se describen, de manera breve, únicamente los elementos
sólidos y elementos de contacto o gap, puesto que son los tipos de elementos
'
utilizados en el modelo de l a estructura en estudio. Una descripción amplia de los
elementos mencionados anteriormente se encuentra, por ejemplo, en Rieger y
Steele (1981)y Spyrakos (1995).
.,
Elemento sólido o ladrillo
Los elementos sólidos son elementos tridimensionales con tres grados de
libertad tipo traslacional por nodo. El software ALGOR v.12. designa a este
elemento como elemento de tipo 5 (type 5). Se asumen propiedades de material
isotrópico para el uso de este elemento en esta investigación.
El elemento sólido básico puede estar conformado desde 4 hasta 8 nodos.
En la figura 2.1, se muestra u n ejemplo de un elemento sólido de ocho nodos.
Algunos ejemplos con los que se puede utilizar el elemento sólido, para realizar
u n análisis de elemento finito, son: placas gruesas, componentes cilíndricos o
esféricos gruesos. Normalmente, se usan en el modelado de estructuras o
componentes estructurales con u n espesor comparable a las otras dos
dimensiones.
Figura 2. I: Elemento sólido o ladrillo d e 8 nodos.
Pag. 23
.
'
Modelado por elenieniosfmi:ss
Elemento de contacto o gap
Los elementos de contacto son utilizados para modelar las condiciones de
frontera y uniones entre componentes estructurales. Estos son útiles ya sea para
evaluar reacciones en soportes rígidos o flexibles, y uniones elásticas o para
"
especificar desplazamientos predeterminados. Los elementos gap son elementos
de dos nodos. La línea definida por los dos nodos indica la dirección en la que la
reacción es evaluada o en que el desplazamiento se especifica. En la figura 2.2, se
presenta u n esquema del elemento tipo gap.
Figura 2.2: Elementofinito tipo Gap
2.3 PROCESO DE MODELADO POR ELEMENTOS FIMTOS
En esta sección se describe con detalle el desarrollo del modelado de la
estructura para pruebas de vibración utilizando ALGOR v. 12. La estructura que
se analizó en esta investigación se encuentra en el laboratorio de ingeniería
mecánica del Cenidet. En la figura 2.3 se presenta una fotografía de la misma.
Figura 2.3: Fotografía d e la estructura para pruebas d e vibración
Como 'primer paso se midieron las dimensiones de la estructura e
identificaron los tipos de elementos que la conforman. La estructura está formada
de cinco tipos de elementos, con las siguientes dimensiones en milímetros:
I ) 4 placas de 90 x lOOx 9,
Pag. 24
Modeludo pc: ele;;lentos.'Xtoz
2 ) 8 soleras de 50 x 4,
3) 4 perfiles L 62 x 62 x 7,
4) 8 perfiles L 38 x 38 x 5,
5) 4 perfiles C 78 x 5.
A partir de la geometría medida de la estructura, se procedió a elaborar el
modelo en ALGOR v. 12 utilizando su interfaz grxica llamada SuperDraw HI. En
esta interfaz se dibujó el modelo de la estructura y se discretizó por elementos
finitos.
La generación de la geometría y discretización del modelo fue u n proceso
que se realizó de manera conjunta. Para la construcción de cada elemento de la
'
estructura primero se dibujó la forma y malla del perfil dado en dos dimensiones
y después se procedió a copiar el perfil el número de veces correspondiente para
obtener la longitud del elemento, indicándole ai programa que las copias
quedaran enlazadas. Este proceso dio como resultado la generación de los
elementos finitos al mismo tiempo que se construyó la longitud del perfil. Los
perfiles restantes se construyeron de la misma manera.
Para el desarrollo de.la discretización se tomó en consideración la relación
de aspecto entre los elementos, es decir, se consideró la relación entre largo y
ancho de los elementos finitos; puesto que esto es u n factor que influye de
'
manera importante en la precisión de la solución (Spyrakos, 1995).
En la figura 2.4a se presenta como ejemplo el perfil L 62 x 62 x 7, dividido
'!
en elementos finitos, dibujado en SuperDraw 111. En la figura 2.4b se muestra el
resultado de copiar el perfil para obtener la construcción su longitud.
Figura 2 4 a) Perfil L 62 x 62 x 7, b) Construcción d e la longitud del perfil
Pag 25
.,..
.._i
Múdelado ph- eicrnentos finitos
El material que constituye toda la estructura es u n accro ,iSTM-A36. En
ALGOR v.12 se pueden establecer diferentes grupos en los que se define la
geometría y las propiedades de los materiales de los elementos que componen el
sistema a analizar. En esta investigación el modelo de la estructura fue divido en
cuatro grupos diferentes para construir, por separado y con mayor facilidad, la
geometría de cada uno de los perfiles que componen la estructura.
En ALGOR v. 12 también se pueden establecer diferentes capas dentro de u n
mismo grupo para la construcción de la geometría del modelo a analizar. En este
proceso de modelado fue muy útil el manejo de distintas capas para construir los
diferentes perfiles (o porciones de ellos) para facilitar la visualización y distinción
de unos con otros. Puesto que la estructura posee perforaciones en algunos
perfiles, la utilización de varias capas facilitó la construcción de la geometría de
este modelo y se utilizaron un total de 15 capas. En la figura 2.5 se muestra el
modelo discreto completo de la estructura
Figura 2.5: Modelo discreto de elemento finito de la estructura elaborado e n SuperDraw III
(los distintos tonos de gnses representan grupos).
4
Pag. 26
_~~_
.___
~
Molelado por elementos finitos
Con la geometría y el mallado del, modelo completos, se seleccionaron las
condiciones de frontera. Para esto; s e - simularon dos casos diferentes. En el
'primero se simuló la estructura libre, es decir, sin restricción de movimiento. En
el segundo se simuló empotramiento en cada una de las bases del modelo de la
estructura. En ambos casos ninguna carga externa o desplazamiento previo
fueron simulados puesto que el análisis que se realizó corresponde a vibración
libre. En la figura 2.6a se presenta la fotografia de u n a de las bases de la
estructura, que se encuentra fija al concreto mediante u n conjunto de espárragotuerca de media pulgada; en la figura 2.6b se presenta la porción del modelo
discreto por elementos finitos de la estructura donde se estableció la condición de
empotramiento.
4
b)
Figura 2.6: Detalle de la condición de empotramiento: a)fotografia del empotramiento,
b) modelo discreto por elementosfinitos del empotramiento.
Teniendo las condiciones de frontera, se prosiguió con la definición del tipo
de análisis (formas modales y frecuencias naturales lineales), la definición de los
tipos de elementos finitos (brick: sólido o ladrillo), las propiedades de los
materiales (acero ASTM-A36) y la especificación de integración de segundo orden
para la solución del problema con el fin de reducir el tiempo y esfuerzo de
procesamiento computacional.
Las propiedades mechicas del acero ASTM-A36, cuyos valores se
encuentran en la base de datos de Algor v.12, son las siguientes:
densidad de masa (p)= 786 1.4 kg/m3
módulo de elasticidad (E)=199.95~109N/m*
relación de Poisson (u)= 0.29
Pag. 21
Modelado por elemeriios finitos
módulo de elasticidad a cortante
(GI=
771221 N/mz, si este valor no se
especifica, Algor v.12 lo calcula como G = E / [ 2 ( 1 - ~ ) ] .
El siguiente paso corresponde a la definición del número de frecuencias
naturales o modos que se deseaban obtener del análisis. Para la condición libre
, se seleccionaron 30 modos de vibración, de los cuáles se esperaban 6 modos
rígidos. Para la condición de empotramiento se seleccionaron 20 modos. Además,
'
se 'especificó, en ambos casos, que se terminara el cálculo cuando se alcanzaran
los 200Hz.
Para ambos casos, se especificó u n número de 100 iteraciones como
máximo para alcanzar la convergencia del sistema, aunado a una tolerancia de
I x ~ O - ~para
O el modo más alto. Por último se indicó al programa que creara u n
13
archivo para guardar la información de las formas modales de la estructura.
Como comentario final, es necesario mencionar que el modelo de la
estructura consta de 8684 nodos y un total de 4407 elementos finitos tipo sólido.
2.4 RESULTADOS
En esta sección se presentan los resultados del modelado numérico: las
frecuencias naturales y formas modales de la estructura. Para esto se divide en
dos partes esta sección, una representa los resultados obtenidos con el modelado
de la condición libre y la otra parte representa los resultados de la condición
empotrada para el modelo discreto de la estructura.
2.4.1 P A R h E T R O S MODALES DE LA ESTRUCTURA LIBRE
Los resultados de las frecuencias naturales de la estructura modelada sin
restricción de movimiento se presentan en la tabla 2 . 1 . En la figura 2.7 se
presentan ejemplos escogidos de las formas modales de la estructura que
corresponden a las primeras 4 frecuencias naturales. Es necesario mencionar
que las deformaciones de la estructura presentadas en la figura 2.7 no están a
escala real, solamente facilitan la visualización de la tendencia de deformación de
los elementos.
PQg.28
'
Modelado por elernenroc jÍmlos
Tabla 2 1 Frecuencizs naturales de la ostructura iibre
1 MODO I
FRECUENCIANATURAL
12 IF1
104.495
I
MODO
I
FRECUENCIA NATURAL
a) 34.629 Hz
b) 85.175 Hz
c) 94.550 Hz
d) 95.966 Hz
Figura 2.7: Ejemplos escogidos d e las formas modales de la estructura libre.
Pag. 29
.: .
.;e.
..
.
Modelado por elemeritos finitos
,
2.4.2 PARAMETROS MODALES DE ¿A ESTRUCTURA EMPOTRADA
Los resultados de las frecuencias naturales de la estructura modelada con
:restricción total de movimiento en sus cuatro bases se presentan en la tabla 2.2.
En la figura 2.8 se presentan ejemplos escogidos de las formas modales
correspondientes a los primeros cuatro modos de vibración de la estructura
empotrada. Nuevamente, las formas modales presentadas en la figura 2.8 no
,lestán a la escala real sino que facilitan la visualización de la tendencia de
deformación de los elementos de la estructura.
Tabla 2.2. Frecue
Pag. 30
:I
.. .
-
-
I<
Modelado por elementos finitos
a) 36.152 Hz
b) 39.728 Hz
c) 57.012 Hz
d) 101.408 Hz
Figura 2.8: Ejemplos escogidos de las formas modales d e la estructura empotrada
En este capítulo se presentaron los fundamentos teóricos del proceso de
modelado por elementos finitos para el análisis de vibración libre. Además, se
presentó la metodología utilizada para modelar por elementos finitos (con ALGOR
v.12) la estructura para pruebas de vibración del Laboratorio de Ingeniería
Mecánica del Cenidet. Se realizaron dos modelos de la estructura, que son:
estructura libre y estructura empotrada. Por último, fueron presentados los
resultados de los parámetros modales obtenidos de ambos modelos.
En el siguiente capitulo se presentará, en la base del análisis modal, el
proceso de identificación de estructuras y sistemas mecánicos aplicado sobre la
estructura para pruebas de vibración del laboratorio de ingeniería mecánica del
Cenidet.
Pag. 3 1
Análisis Modal
.
.
..
Capítulo 3
ANÁLISIS MODAL
El análisis modal consta de dos etapas: la me ción experimental y
ajuste
de las curvas de los datos experimentales por medio de un modelo matemático.
En este capítulo se presenta el desarrollo de ambas etapas del análisis modal
realizado sobre u n a estructura que. se usa para pruebas de vibración (la misma
que se modeló por elementos finitos), para conocer su comportamiento dinámico.
3.1 FUNDAMENTOS T E ~ R I C O S
El objetivo principal del análisis modal es determinar un conjunto de
I
propiedades modales características de las estructuras, elementos mecánicos o
sistemas mecánicos. Estas consisten en las frecuencias naturales, factores de
amortiguamiento modales y formas modales. El procedimiento para lograr tal
II
objetivo consta de los tres pasos siguientes:
a) medir un conjunto de movilidades apropiado (funciones de respuesta a la
frecuencia),
b) analizar las FRF's utilizando u n procedimiento de ajuste de curvas,
c) combinar los resultados de los ajustes de curvas para construir el
modelo representativo (formas modales).
Antes de describir la metodología empleada en este estudio para el análisis
modal, se considera pertinente presentar los' elementos necesarios para la
realización de esta tarea.
Pag.32
Análisis Modal
3 . 1 . 1 CONSZDERACZONES DEL SISTEMA '
Para hacer posible la ejecución de un .análisis modal, generalmente se
imponen sobre cualquier estructura o sistema mecánico las tres consideraciones
básicas siguientes:
a) la estructura es lineal,
b) la estructura es inuariante con el tiempo,
c) la estructura es obseruabl;.
La linealidad del sistema significa, que la respuesta de la estructura a
cualquier combinación de fuerzas, simultáneamente aplicadas, es la suma de las
respuestas individuales a cada u n a de las fuerzas aplicadas solas.
La no varianza del sistema con el tiempo significa que los parámetros a ser
determinados son constantes, es decir, las mediciones hechas al sistema en dos
'r
tiempos diferentes serán consistentes.
La estructura sólo puede ser observable -si las mediciones de entrada y
salida realizadas contienen la información suficiente para generar un modelo
~
adecuado del comportamiento de la estructura.
3.1.2 FUNCZdN DE TRANSFERENCIA DE UN GRADO DE LBERTAD
La dinámica de una estructura o sistema mecánico puede ser modelada con
u n modelo en el dominio de Laplace (Richardson and Formenti, 1982). En este
modelo, las excitaciones y respuestas de la estructura estarán representadas por
sus transformadas de Laplace, es- decir, por las funciones de transferencia de la
estructura. Estas funciones de transferencia estarán contenidas dentro de una
matriz de transferencia que contiene toda la información necesaria para describir
las respuestas de la estructura o sistema mecánico en función de las cargas
externas aplicadas.
La variable de Laplace es una variable compleja denotada, en este caso, por
la'letra s. Ya que' la función de transferencia es una función de la variable s,
entonces, es también evaluada de forma compleja. Puesto que la función de
transferencia es compleja, puede ser representada por sus partes real e
imaginaria o por 'su magnitud y fase mediante una gráfica en dos dimensiones
llamada plano s (Richardson and Formenti, 1982).
Pag. 33
Análisis Modal
..
La magnitud de la función de transferencia tiende al infinito en dos puntos
del plano complejo. Estas singularidades son llamadas polos de la función de
transferencia. Estos polos definen las condiciones de resonancia en una
estructura o sistema mecánico que “amplificará“ alguna fuerza de entrada. La
localización de estos polos en el plano s está dada por u n valor de frecuencia y un
valor de amortiguamiento como se muestra en la figura 3. I
Nomenclatura del Plano s
j <o
t
s = u + I L”
Polo conjugado
o = coeficiente de amortiguamiento
o = frecuencia naturai amortiguada
f2 = frecuencia natural resonante (no amortiguada)
= f2 cos p = factor de amortiguamiento ( % del amortiguamiento crítico]
<
Figura 3.1: Localización d e un polo en elplano s (Richardson and Formenti, 1982)
3.1.3 FUNCIONES DE RESPUESTA A LA FRECUENCIA (FRF’s).
En el experimento no se mide la función de transferencia sobre el plano s en
su totalidad, sino más bien a lo largo del eje de la frecuencia. Estos valores son
conocidos como la función de respuesta a la frecuencia.
La función de respuesta a la frecuencia (FRF) es u n a medición fundamental
que aísla las propiedades dinámicas de una estructura mecánica. Es posible
obtener los parámetros modales de la estructura (frecuencias naturales,
amortiguamientos y formas modales) a partir de un conjunto de mediciones de
FRF’s.
Una FRF representa u n a medida de cuanta respuesta (desplazamiento,
velocidad o aceleración) tiene una estructura en un punto dado debida a una
fuerza aplicada en algún otro punto.
II
En la figura 3.2 se presenta un diagrama que muestra una FRF, definida
por la razón entre la transformada de Fourier de una respuesta de salida X ( o )
Pag. 34
Análisis Modal
dividida por. la transfxmada de Fcurier de una fuerza de entrada F ( w ) , donde:
X(t)
Tiempo: F(t)
Sistema Mecánico
Frecuencia: F(w) x [H(w)]
-3
= X(w)
I
Figura 3.2: Diagrama d e una FRF (Schwarz and Richardson, 1999).
En esta investigación se utilizó la función de receptancia o inertancia
(aceleración/fuerza).
3.1.4 SISTEMA DE EXCITACIdN
Existen dos tipos de excitación para realizar u n análisis modal, estos son:
excitación por medio de impacto o con un excitador. Cuando la salida es fija y las
FRF’s son medidas por diferentes entradas (una fila de la matriz FRF), se realiza
un experimento con martillo de impacto. El experimento con excitador es cuando
la entrada es ‘fija y las FRF’s son medidas por diferentes salidas (una columna de
la matriz FRF).
El experimento modal requiere que las FRF’s sean medidas de por lo menos
una ‘columna o una fila de la matriz FRF. La frecuencia natural y el
amortiguamiento modal son propiedades globales de u n a estructura y pueden ser
determinadas de alguna o todas las FRF’s en u n a fila o columna de la matriz
FRF. ‘Por otro lado, cada forma modal es obtenida ensamblando los términos
numeradores de las FRF’s (residuos) de al menos’una lila o columna de la matriz
FRF.
La t6cnic.a de excitación utilizada en esta investigación fue la de martillo de
impacto.
!
,
!
t
Pag. 3 5
Análisis Modal
3.1.5 EXPERIMENTO MOPAL CON MARTILLO DE IMPACTO
El experimento modai con martillo de impacto es la técnica más popular en
análisis modal desde los años 19.70’s. La excitación con martillo de impacto es
una forma rápida, conveniente y de bajo costo para encontrar los modos de
vibración de una estructura o sistema mecánico (Schwarz and Richardson, 1999).
Para realizar el experimento modal con martillo .de impacto, primero s e fija un
acelerómetro en u n punto de la estructura o sistema mecánico y después ésta
estructura se golpea con el martillo de impacto en tantos puntos de la estructura
como se desee. Es importante mencionar que la dirección del impacto debe ser la
misma que la dirección de medición del acelerómetro.
Usando u n analizador de espectros de dos canales, las FRF’s son calculadas
(una a la vez) entre cada impacto y la respuesta obtenida por el acelerómetro
fijado en un punto.
El equipo requerido para realizar u n análisis modal con la técnica de
martillo de impacto es el siguiente:
1. Un martillo de impacto que contiene una celda de carga (sensor de fuerza)
colocada en su cabeza para medir la fuerza del golpe (excitación).
2. Un acelerómetro para medir la aceleración como respuesta en u n punto de la
estructura o sistema mecánico en estudio, con la dirección requerida en
coordenadas cartesianas X, Y o Z.
3. Dos amplificadores de seriales para acondicionar las seriales obtenidas del
acelerómetro y del martillo de impacto.
4. Un analizador FFT de al menos dos canales para calcular las FRF’s.
5. Software de pos-procesamiento modal para identificar los parámetros
modales.
En la figura 3 . 3 se presenta un esquema de la realización de un experimento
modal utilizando la técnica del martillo de impacto.
Pag. 36
Ariálksis Modal
.
.
-(.
I
I
~
~
FFT
~
Ampliíicador
l
>
~
~
d
~
~
Programa de an8Iisir
modal:
Comercial o propio
señales
a) Frecuencias naturales.
b] Factores de amortiguamiento.
c ] Formar modales.
Acelerómetro
Figura 3.3: Esquema del análisis modal utilizando la técnica de martillo de impacto.
3.2 EXPERZMENTO MODAL
En esta parte se presenta la metodología usada para la realización del
experimento modal, así como el equipo y sistema de adquisición de datos
experimentales utilizados y su configuración.
3.2.1 EQUIPO
El equipo utilizado para el experimento modal se presenta en la figura 3.4 y
es el siguiente:
el objeto de estudio (en este caso: la estructura para pruebas de vibración
existente en el Departamento de Ingeniería Mecánica del Cenidet),
analizador de señales Hewlett Packard (HP)modelo 3566A, (4)
martillo de impacto con celda de carga, marca Kistler; modelo 9724A2000, (1)
u n acelerómetro, marca Kistler; modelo 8630C50, con intervalo de medición
de
+ 50g, y sensibilidad de 100.2 mV/g.
dos amplificadores de baja impedancia, marca'Kistler; modelo 51 18A1, (2)
computadora HP Vectra 486/66 X M , (3)
cables y conectores.
Pag. 37
,
‘ _
Análisis Modal
P
I
I
\
._.
.. ,
Figura 3.4: Fotografia del sistema de adquisición de los datos experimentales: (1) martillo
de impacto, (2) amplficadores de baja impedancia. (3)computadora, (4) analizador de
espectros.
3.2.2 COWIGURACídN DEL SISTEMA
Para realizar el experimento modal con la técnica del martillo de impacto, el
equipo se conectó convenientemente. El acelerómetro se fijó sobre la estructura
para pruebas de vibración en puntos escogidos. Tanto la salida de la señal del
martillo de impacto como la del acelerómetro se conectaron a amplificadores de
baja impedancia para acondicionar dichas señales. Los amplificadores se
conectaron al analizador de señales, de manera que sólo fue necesario la
utilización de dos canales activos; el primero para el martillo de impacto y e 1
segundo para el acelerómetro. Además, el analizador de señales se conectó a una
computadora para que los resultados fueran presentados de forma gráfica.
El analizador de señales Hewlett Packard (HP) modelo 3566A se preparó
para el experimento modal con martillo de impacto con base en la metodología
propuesta por el manual del fabricante HP 3566A/3567A “Getting Started”
(1992),como sigue:
1. Establecer el número de canales activos: 2 canales (canal 1: martillo, canal 2:
acelerometro),
2. Especificar el intervalo de medición: OHz - 200Hz,
3 . Especificar el modo de medición: bajo modo de disparo (under trigger mode),
4. Especificar el tipo de medición: medición de respuesta a la frecuencia
(frequency response),
5. Seleccionar el tipo de filtro de señal para remover oscilaciones residuales y
ruido: ventana fuerza/exponencial (force/exp window),
Pag. 38
’
Afiálisis Modal
.:
6 . Seleccionar el número de impactos que serán promediados para obtener la
función de respuesta a la frecuencia: 15 golpes
a promediar,
. .
7. Especificar el tipo y número de gráficas'en las que serán presentados los
resultados: diagramas de Bode (dos grafcas: u n a presenta la magnitud de la
receptancia y la otra presenta la fase),
8. Iniciar el experimento.
La punta utilizada en el martillo de impacto con celda de carga fue la punta
tipo 9912 (punta plástica color gris), que permite excitar la estructura dentro del
intervalo de OHz a 350Hz. El acelerómetro (marca Kistler; modelo 8630C50)
utilizado para el experimento modal funcionó como la referencia para cada uno
de los elementos de' la estructura que fueron medidos. Los resultados del
experimento modal fueron grabados en archivos para su posterior análisis.
El experimento modal fue realizado con d o s condiciones de frontera
diferentes. El primer caso fue la'condición de estructura libre y para lograr esto se
aplicaron dos técnicas. En la primera técnica, la estructura se montó sobre
esponjas de baja rigidez (ver figura 3.5a)y en la segunda técnica la estructura fue
colgada en dos diferentes formas, estas son: con ligas cuya rigidez es baja (ver
con la
figura 3.5b) y con cuerda de nylon de 40kg de resistencia (ver figura 3.5~1,
finalidad de conocer la influencia de la rigidez de estos materiales sobre los
parámetros modales de la estructura. Para realizar el experimento se seleccionó
u n intervalo de frecuencia de OHz a 200Hz. Se decidió usar 800 líneas
espectrales, por lo que la resolución de la medición resultó ser de 0.25Hz.
I
al
bl
CI
Figura 3.5: Fotografias de las tres diferentes formas de suspension de la estructura: a) con
esponjas comerciales de baja rigidez, b] con ligas comerciales de baja rigidez, c] con
cuerdas d e nylon d e 40kg de resistencia.
Pag. 39
Análisis Moda/
El segundo caso fue la condición de estructura empotrada, que permite
medir el comportamiento de la estructura en condiciones reales (ver figura 2.3).
La estructura se sujetó firmemente al piso mediante un conjunto de espárragotuerca de media pulgada de diámetro en cada una de sus cuatro bases. Para este
experimento se seleccionó un intervalo de frecuencia de OHz a 400Hz y 800 líneas
espectrales, dando como resultado u n a resolución de 0.5Hz.
3.2.3MEDICIONES
En la figura 3.6 s e presenta u n esquema de la estructura modelada por
elementos finitos donde se indican los siete elementos que fueron medidos.
Además, 'se indican los elementos medidos 8, 9 y 10 que son los elementos
homólogos a 1, 2 y 3 , respectivamente
Figura 3.6: Elementos de la estructura utilizados para el experimento modal.
Cada elemento fue medido en dos direcciones, para lo .cual el acelerómetro
se fijó de manera perpendicular a cada u n a de las superficies medidas de los
elementos. El número de nodos experimentales (puntos en los que se golpeó con
el martillo d e impacto) que se escogieron para cada elemento medido varió de 6 a
9 nodos, de la siguiente manera:
Elemento 1 en direcciones X y Z: 9 nodos,
Elemento 2 en direcciones X y Y: 8 nodos,
Elemento 3 en dirección Y: 6 nodos, en dirección Z: 8 nodos,
Elemento 4 en direcciones X y 2: 7 nodos,
Pag. 40
Análisis Modal
Elemento 5 en direcciones Y y 2:6 nodos,
,
Elemento 6 en direcciones X y 2:7 nodos,
Elemento 7 en direcciones Y y 2:6 nodos.
Cabe mencionar que el número de nodos seleccionado para cada uno de los
elementos se consideró suficiente para describir sus formas modales.
El método de medición que se utilizó para el experimento modal fue el
llamado medición de referencia única (SISO), es decir, el acelerómetro se fijó en
un punto y direccion para cada elemento de la estructura y el martillo de impacto
se utilizó para excitar, por medio del golpe, los diferentes nodos escogidos para
medición de cada elemento. En ,este caso, el acelerómetro es llamado la
referencia.
Para obtener cada una de las funciones de respuesta a la frecuencia se
utilizó la característica que presenta el analizador de señales de promediar los
espectros de frecuencia y la Característica de aceptar o rechazar una medición
realizada por el martillo de impacto. Como se mencionó en la sección 3.2.2,
fueron 15 golpes en cada nodo escogido los que fueron promediados para obtener
cada una de las FRF’s. Cabe señalar que se utilizó el promedio de quince golpes
por la gran cantidad de nodos que se habrían de medir y porque las funciones de
coherencia de las FRF’s obtenidas tuvieron valores superiores a 0.9.
El número total de las funciones de respuesta la frecuencia medidas sobre
los elementos 1 a 7 de la estructura fue de cien FRF’s. Además, se midieron 48
FRF’s más, pertenecientes a los elementos 8, 9 y 10.. Los archivos de las FRF’s
obtenidas del experimento modal fueron guardados en la computadora HP Vectra
para su posterior análisis.
Los elementos 8, 9 y 10 (ver figura 3.6) de la estructura fueron medidos con
la finalidad de verificar la existencia de simetría en la estructura. Los resultados
de estos elementos fueron comparados con los de los elementos 1, 2 y 3 ,
respectivamente. Se observaron algunas diferencias en la apariencia de las FRF’s,
además de la presencia de algunos modos que en u n elemento aparecían y de los
cuales su homólogo carecía. De estas observaciones, se afirma que la estructura
tiene cierto grado de asimetría (ver sección 4.3).
Pag. 41
.
-
Análisis Muda:
3.3 ANÁLISIS DE LAS FUNCIONES DE,RESPUESTA A LA FRECUENCU
Una vez realizado el experimento modal, el siguiente paso es el análisis de
las funciones de respuesta a la frecuencia (FRF's) para extraer los parámetros
modales de la estructura. Para ello se elaboró, en Matlab v.5.1, el programa
propio MEPFRA1. Este programa permite redizar el ajuste de las curvas FRF's
experimentales utilizando el método polinomial de fracciones racionales (RFPM).
Del programa MEPFRAI se extraen de manera cuantitativa las frecuencias
naturales, los factores de amortiguamiento modales y las constantes modales.
Además, el programa MEPFRA1 tiene opción de visualización de los resultados
del ajuste obtenido en diagramas de Bode (magnitud de la FRF y su fase) y las
formas modales del elemento medido en vistas plana y espacial.
3.3.1 MÉTODO POLINOMIAL DE FRACCIOAES RACIONALES (RFPIM)
El método polinomial de fracciones racionales funciona dentro del dominio
de la frecuencia y es u n método para sistemas con múltiples grados de libertad.
La ecuación de la función de respuesta a la .frecuencia se expresa en la forma de
fracciones racionales. La
descripción
del método
se encuentra en las
publicaciones hechas por Richardson y Formenti (1982) y Mendes (1988).Puesto
que el sistema de ecuaciones lineales resultante involucra matrices mal
condicionadas, se utiliza el método del gradiente (Cid y Mateos, 2001) para
minimizar la función de error y la estimación inicial se calcula mediante el
método de mínimos cuadrados (Kennedy y Neville, 19821, (Phillips, 1995).
En la base de la teoría del análisis modal, la FRF en términos de la
receptancia para un sistema lineal con N grados de libertad y amortiguamiento
viscoso puede ser modelada con la siguiente ecuación en la forma de fracción
parcial (Richardson and Formenti, 1982):
donde:
A, y B, son constantes,
o es la frecuencia de vibración [rad/s; Hz],
o, es la frecuencia natural del modo r-ésimo [rad/s, Hz],
res
-
-I,
Pag. 42
.
.
ires el factor de amortiguamiento viscoso del modo r-ésimo.
La ecuación (3.1) puede ser expresada también en forma de fracción
racional, como sigue:
k=O
donde:
N es el número de modos de il: iión,
a, es la constante k-ésima del polinomio numerador,
b, es la constante k-ésima del polinomio denominador.
La
diferencia entre la FRF analítica
experimentalmente
H ( w ) y la FRF obtenida
H,(u)es la función de error (e,) dada por.
k=O
donde: j es el índice correspondiente a una frecuencia u específica,
La función de error se linealiza, trabajando con la siguiente función de error
modificada:
2 ,\'
e'1 = e , c b, (i
k=O
(3.4)
Haciendo bzx = 1 . Esto lleva a:
U n vector de error es definido para todas las L frecuencias medidas:
La ecuación (3.6)expresada en forma matricial es la siguiente:
Pag.43
o, en forma condensada:
La ecuación que será minimizada con el método del gradiente es la función
de error elevada ai cuadrado J:
J={E*~{E}
(3.9)
Donde * indica el conjugado complejo. Entonces, sustituyendo' la ecuación
(3.8)en la ecuación (3.91,y después de realizar algunas operaciones algebraicas,
se obtiene:
J ={o}' Re[P*]'[P])ln)+{b}'Re[T*]T[T])[b}+{lV*]' { W } -
(3.10)
Z{a}' RE[P']~
[T])(b}- 2{a}' Rc[P*]'[W])+ 2{b}' Re1T*]'[W])
Esta es una ecuación que contiene matrices mal condicionadas. Por esta
razón, se utiliza el método del gradiente para minimizar la función de error de la
ecuación (3.10). Sin embargo, puede utilizarse el método de los mínimos
cuadrados para obtener la estimación inicial que se necesita para el método del
gradiente.
ecuación (3.10)con respecto a { o } y { b ] ,e igualándolas a cero da como resultado
el siguiente sistema de ecuaciones:
o, de forma condensada:
Pug.44
Análisis Modal
(3.12)
donde:
'Ir [PI]
[Y] = Re[P
[A'] = - Re[f
'1' [TI)
[Z]= Re[T*]r[T])
{G}= Relf
'1' {W})
(3.13)
{ F } =-Re[T*]'{W})
Al resolver este sistema de ecuaciones, se obtienen los valores iniciales de
{o} y {b}. A continuación se presenta el método del gradiente utilizado para
obtener las estimaciones de {o} y {b}.
3.3.1.1 MÉTODO DEL GRADIENTE
La ventaja del método del gradiente es que d a u n a dirección para poder
seguir u n camino que puede minimizar el error. El gradiente (o derivada parcial)
del error respecto a un vector, es u n vector cuya dirección es la dirección de
crecimiento máximo del error. Su módulo es la variación del error en esa
dirección (la de máxima variación) y su sentido es el que indica el crecimiento
(Cid y Mateos, 2001).
Como el objetivo es minimizar el error, lo que se debe hacer es ir en sentido
contrario al que indique el vector gradiente. Además, para garantizar una
convergencia más rápida se utiliza un vector gradiente normalizado; este se
obtiene dividiendo el vector gradiente por su norma o módulo.
{b}, obtenidas de la utilización del método de mínimos cuadrados, para evaluar el
gradiente. El gradiente con respecto a { o } e s la derivada parcial de la ecuación
(3.10) con respecto a {o}:
Re(lP.1' [P])ia}- Re[P*]'[T])jb} - Re(lP.1' {W})={ M }
(3.14)
donde {A41 es el vector gradiente con respecto a {u)
Pag. 45
Análisis Modal
El gradiente con respecto
á
{h} es la derivada parcial de la ecuación (3.10)
con respecto a {b}:
(3.15)
donde { R } es el vector gradiente con respecto a {b}.
Entonces, con las ecuaciones (3.14)y (3.15),el vector gradiente es:
(3.16)
Se calcula la dirección del vector gradiente con la finalidad de restarla a los
coeficientes para moverla en la dirección donde la función es minimizada. La
dirección del vector gradiente es:
(3.17)
donde {If} es la norma del vector.
Por tanto, los nuevos coeficientes son:
(3.18)
Entonces el vector gradiente y su norma respectiva son calculados y
comparados con la tolerancia deseada. Si el valor es mayor que la tolerancia, la
dirección del vector gradiente es sustraída a los coeficientes para calcular los
nuevos coeficientes. El proceso se repite hasta que la norma del vector gradiente
es menor que la tolerancia.
Después de obtener los coeficientes de la ecuación de fracciones racionales
(3.2),es posible calcular los p a r h e t r o s modales. Las raíces o polos del polinomio
denominador contienen los valores de la frecuencia natural
amortiguamiento
(< ,),
el factor de
Estos pueden obtenerse como sigue:
(3.19)
donde P, es el polo del modo r-ésimo
Pag. 46
Análisis Modal
Para calcular lcs’residuos, se expande la fracción racional en u n a ecuación
de fracciones parciales y el numerador se vuelve un par de constantes complejas
conjugadas, llamadas residuos. Entonces, de la ecuación (3.1),se puede escribir
en la siguiente forma:
A,
=-2[Re(R,)Re(Pj)+Im(R,)Im(Pr)]
(3.20)
E , = 2 Re(R,)
donde R, y
P,.
son los r-ésimos Residuos y Polos respectivamente.
Por tanto, la constante modal estará dada por:
C, = AS
Donde
‘P,= u ,en la ecuación
+ P,
B,?
(3.21)
(3.1).La fase de la constante modal será:
(3.22)
3.3.2JUSTIFICACI~NDEL MODELO MATEMATICO
En
esta
sección
se presenta
la justificación
de
la
elección
de
amortiguamiento viscoso para el modelo matemático. El amortiguador viscoso es
el tipo más simple de amortiguamiento desde el punto de vista teórico. Es el
amortiguador de carácter lineal en el que las ecuaciones de movimiento del
sistema, incorporando este tipo de amortiguamiento, pueden ser resueltas con
facilidad. Por definición, el amortiguador viscoso es un dispositivo que se opone al
movimiento relativo entre sus extremos con una fuerza proporcional a esa
velocidad ( f= c
s.).La energía disipada Ai5 por,ciclo de oscilación esta dada por:
AE=?rx”cw
(3.23)
De la ecuación (3.23), se observa que la disipación de la energía es
dependiente de la frecuencia en este modelo. Por el contrario, en la mayoría de los
materiales más comunes y en las estructuras reales se ha observado que poseen
mecanismos de disipación de energía casi o totalmente independientes de la
frecuencia.
Entonces, se requiere u n modelo de amortiguador que se oponga al
movimiento relativo entre s u s extremos con u n a fuerza que sea proporcional a su
desplazamiento y no a su velocidad. Esto es equivalente a usar un amortiguador
Pag. 47
Análisis Modal
viscoso cuya razón de m-xtiguamiento varia inversamente proporcional a la
frecuencia
( c= d / o). Este amortiguador
se conoce como histerético o
estructural, ' y a d se le conoce como el coeficiente de 'amortiguamiento
estructural. Esta designación resulta del hecho de que este mecanismo describe
muy cercanamente el comportamiento de histéresis carga/deformación de la
mayoría de los materiales.
En este caso, la energía disipada AE por ciclo de oscilación esta dada por:
AE=7rX2d
(3.24)
La amplitud máxima X de la respuesta en estado estacionario de u n sistema
con amortiguamiento histerético siempre se obtiene a w = o,,
mientras que para
.
el amortiguamiento viscoso ocurre a w = u,,
. 1- 2
c2. En la figura 3.7 se presenta
una grálica del factor de amplificación Q contra la razón de la frecuencia /3,
donde se observa que los picos en las amplitudes-ocurren a la izquierda de la
linea
p = l , siendo
el cambio mayor para valores mayores de amortiguamiento
viscoso,
u
0.5
I
1.5
I:riqucriry
2
mi"
p
I 5
Figura 3.7: Grafica del factor d e amplficación Q contra la razón d e la frecuencia
and Montaluao, 1998).
p (Mendes
Sin embargo, como mencionan Lee y Richardson (1992), la mayoria de las
estructuras reales tienen factores de amortiguamiento que varían de
6 = 0.003
a
Pag.4 8
-
Análisis Modal
< = 0.2 (de 0.3% a 20%); por lo tanto, usualmente se considera que la resonancia
ocurre a w = w n . El error es menor al 1% para (=O.] y menor al 10% para
< = 0.5, Por lo tanto, para valores de amortiguamiento bajos, u n
sistema con
amortiguamiento viscoso puede ser asumido con suficiente precisión como lo
exhibe su amplitud máxima de respuesta en estado estacionario a w = w , , y
entonces el comportamiento de su amplitud de respuesta puede asumirse como
equivalente al comportamiento de u n sistema amortiguado histeréticamente
(Mendes and Montalvao, 1998).
3.3.3 DESCRIPCIdN DEL PROGRAMA MEPFRAl
El Departamento de Ingeniería Mecánica del Cenidet no contaba con una
herramienta (software comercial de análisis modal) que permitiera identificar
dinámicamente las estructuras, sistemas y elementos mecánicos. De aquí surgió
la necesidad de elaborar u n programa de cómputo propio que permita realizar
este tipo de tareas.
Por esta razón, se elaboró u n programa propio (MEPFRAl) que permite
identificar el comportamiento dinámico de las estructuras y sistemas mecánicos.
El programa MEPFRA1, codificado en Matlab v.5.1, se desarrolló en la base del
método polinomial de fracciones racionales. Este programa fue validado, con
funciones de receptancia sintetizadas a partir del análisis teórico de sistemas
cuyos parámetros modales son conocidos, antes de estimar los parámetros
modales de la estructura en estudio. En el apéndice B se presentan tres ejemplos
teóricos que validan la precisión y confiabilidad del programa MEPFRA1 para
estimar los parámetros modales. Además, en el apéndice C se presenta el código
del programa MEPFF3.1 codificado en Matlab v.5.1.
Como resultado
del experimento modal
se
obtuvieron .archivos que
contienen las FRF’s experimentales. Sin embargo, el formato de estos archivos fue
cambiado a formato ASCII donde la información fue dividida en tres columnas: la
columna uno corresponde a la frecuencia, la columna dos es la parte real de la
receptancia y la columna tres es la parte imaginaria. Finalmente, estos archivos
fueron cambiados a formato de Matlab (archivos con extensión: .dat) para que
pudieran ser procesados por MEPFRAl. En la figura 3.8 se presenta el diagrama
de flujo del programa MEPFRAl.
Pag.49
i
Análisis Modal
mcdicibn de la FRF
ca~a~ienw
(denominador)
~o
Errilar I I el jalar de la frriucnria.
hluliiplicsi por 2 los ~ d o r idel
i num y drnoin,
,-,:I:
Regenerar in FRF B partir de los paihmrlras
modales csiimadoi.
Calcular la deariacion m a n d a r e n m la FRF
variar FRFsI.
Prerrnlar C" vista plana y espacia1 la3
formar modalrs dr 105 modas identificados
lsalo para opclbn: variar F R W
' I
*
Tz z z
, . PROCESO B
-,
:
(47)
I .
Figura 3.8: Diagrama de flujo del programa MEPFRA I
Pag. 50
Aiiblisis modal
En el diagrama de flujo de la figura 3.8 se observa que el programa
MEPFRA1 tiene dos opciones para realizar el ajuste de las curvas FRF’s
experimentales, como son: ajustar’unaFRF y ajustar varias FRF’s.
Los procesos A y B se realizan en las dos opciones de ajuste de las FRF’s. La
diferencia principal entre el proceso del ajuste de u n a FRF y el ajuste de varias
FRF’s es el siguiente: cuando se ajustan varias FRF’s se obtiene una FRF global
(que es la suma de todas las FRF’s experimentales leídas) de la cual se extraen los
parámetros modales; mientras que en el proceso de ajuste de una FRF, los
parámetros modales se extraen de dicha FRF. Además, Cuando se ajustan varias
FRF’s, el programa genera y presenta automáticamente las formas modales de los
modos identificados.
3.3.4 G U h DE USO DEL PROGRAMA MEpFRAl
El proceso del ajuste de curvas con el programa MEPFRA1 se divide en dos
partes. La primera parte consiste en preparar los archivos que serán utilizados
para realizar los ajustes de curvas y la segunda parte es ejecutar el programa
MEPFRAI. Para que la explicación del uso del programa sea más ilustrativa, se
tomara como ejemplo: el archivo “1xl.dat” obtenido a partir del experimento
modal realizado a la estructura empotrada.
3.3.4.1 PFSPARACIÓN DEL ARCHIVO DE DATOS EXPERIMENTALES
El primer paso es convertir el archivo de datos experimentales, obtenidos
con el uso de la técnica del martillo de impacto, a formato ASCII. Para esto, se
usa el programa de proceso por lotes SDFASCCI elaborado en el Departamento de
ingeniería Mecánica del Cenidet, que se ejecuta en el AUTOEXEC de MS-DOS, el
cuál contiene la utilería de conversión de datos procedente del analizador de
eS&CtTOS:
SDFTOASC.
El código del programa SDFASCCI es el siguiente:
.......................
echo off
sdftoasc 1 s l . D A T 1 s l . C S V /t:r,i / d : O / r : O /b:,/ o /x
echo on
.......................
donde:
Pug. 5 1
Análisis modal
sdftoasc - utileria del analizador de espectros HP 3566A,
1xl.DAT - archivo obtenido del experimento modal,
1x1 .CSV - archivo deseado en formato ASCII,
El paso siguiente es abrir el archivo “1xl.CSV” con el programa de hoja de
cálculo EXCEL 2000. Para lograr esto, se realiza lo siguiente:
1. abrir el programa EXCEL 2000,
2. En la ventana de comandos, seleccionar el icono “abrir”, entonces se
selecciona el archivo “1xl.CSV”y se presiona la tecla intro,
3. El programa EXCEL 2000 abre el archivo y divide los datos en tres
columnas, la columna 1 es la frecuencia en Hertz, la columna 2 es la
parte real y la columna 3 es la parte imaginaria de la receptancia.
4. Ahora se seleccionan todos los datos y se usa el comando “copiar”,
enseguida se “pegan” los datos en u n archivo de Matlab y, finalmente se
guardan con extensión .dat. Para este ejemplo, el archivo se llamará
“1xl.dat”.Ahora y a se cuenta con el archivo que contiene los datos con
el formato requerido por el programa MEPFRA1.
3.3.4.2 EJECUCIÓN DEL PROGRAMA MEPFRAl
Para realizar el ajuste de una FRF con el programa MEPFFL41 se deben
seguir los siguientes pasos:
1. Abrir el programa Matlab v.5.1,
2. Indicar la ruta de acceso donde se encuentra el programa,
3. En la ventana de comandos, teclear rnepfraí y pulsar “entrar”,
4. En la ventana aparecerán los archivos con extensión .dat que existan en
la ruta indicada. Para este caso aparecerá listado el archivo “ l x l . d a t ” ,
además del siguiente mensaje:
******+**********
1xl.dat
Escribe entre cotas el nombre de los datos seleccionados(no escribas la
extension)
*****************
5. Entonces se debe teclear ‘1x1’y pulsar “entrar”:
******I**********
‘1x1’
*e***************
Pag.52
*
Análisis modal
6 Esto originará un pequeño menú que preguntará como se desea
seleccionar el intervalo de frecuencia:
Elige el modo de selección del iango de fiecuencia:
7 . Ahora se selecciona un intervalo de: '1Hz a 2OOHz.
8. Después, el programa pregunta lo siguiente:
......................
¿Cuantos grados de libertad para el denominador?:
.......................
El denominador corresponde al polinomio característico del sistema, por
lo que su valor depende del número de frecuencias que se encuentran
dentro del intervalo seleccionado. Sin embargo, si se escoge un número
mayor al número de frecuencias existentes, se producirá la aparición de
"modos computacionales" que no tienen significado fisico. Cabe aclarar
que estos n o afectan los resultados de los modos verdaderos (Richardson
and Formenti, 1982). A s í , que sólo será necesario desechar los
resultados de los modos computacionales. MEPFRA1 presenta u n a
gráfica de la parte imaginaria de la receptancia con la finalidad de
ayudar al usuario a determinar el número de frecuencias existentes
dentro del intervalo seleccionado.
9. Enseguida el programa preguntará:
........................
¿Cuantos grados de libertad para el Numerador?:
........................
El número debe ser entero y puede ser desde: una unidad menor al
grado que se dio al denominador hasta dos veces mayor que el grado del
denominador. Establecer un número mayor al doble del valor del
denominador no mejorará el ajuste, Esta cantidad depende del número
Pag. 53
.
Aiiálisis modo;
de modos de vibración que existen fuera, pero cerca, de los limites del
i n t e n d o de frecuencia seleccionado y cuya contribución es importante.
Para el ejemplo mostrado, se seleccionó: 8 para el denominador y 12
para el numerador, con lo que sólo se dio la aparición de u n modo
cornputacional, puesto que siete modos existen dentro de este intervalo
de frecuencia seleccionado. El ajuste obtenido se muestra en la figura
3.9a y 3.9b
,",IE
a
w
81
D
r,.".h.
Irn
,m,
I=
IO
IU
m
I
a) magnitud de la FRF
b) Fase de la FRF
Figura 3.9: Ajuste d e curuas del elemento 1, dirección X
En la tabla 3.1 se muestran los resultados numéricos obtenidos de este
ajuste.
Frecuencia Natural
Factor de
[Hzl
amortiguamiento
Desviación
[ % del amort. Crítico]
estándar
30.018
11.247
40.852
9.232
108.924
120.582
2.825
3.612
141.395
2.475
148.982
2.829
181.094
2.746
0.00106
Pag. 54
10.E1 programa MEPFRA1 tiene la opción de realizar el .ajuste de v x i e s
FRF's dando, así, la posibilidad de obtener las formas modales de los
elementos medidos. Para el elemento 1 en la dirección X, las formas
modales obtenidas con el programa MEPFRAI se observan en la figura
3.10
....
Figura 3.1O: Formas modales del elemento 1, dirección X (estructura empotrada).
En la siguiente sección serán presentados los resultados del análisis modal
de la estructura bajo las dos condiciones de frontera utilizadas en esta
investigación.
3.4 RESULTADOS
En esta sección se muestran los valores numéricos de los parámetros
modales de la estructura estimados con MEPFRA1 a partir del experimento
modal. Además, s e presentan gráficamente las formas modales, obtenidas con
MEPFRA1, de los elementos 1 y 3 de la estructura en sus dos direcciones
medidas.
El proceso para obtener los modos de vibración de la estructura, a partir de
las mediciones realizadas sobre los elementos individuales de ésta, es el
siguiente:
1. Se ajustan las curvas de las FRF's medidas de cada elemento y se extraen sus
parámetros modales con MEPFRA1,
2. El procedimiento realizado en el paso 1 se aplica a todos los elementos de la
estructura,
Pag. 5 5
Atia!;sis modal
3. Las frecuencias naturales y factores de amortiguamiento de cada elemento
(ver paso 2) se ordenan en una tabla. De esta tabla se calculan las frecuencias
naturales y factores de amortiguamiento de la estructura como un promedio
de todos los resultados de cada elemento en los que tienen efectos los modos
de vibración.
Los resultados del análisis modal del sistema se dividen en dos secciones:
una para el análisis modal realizado sobre la estructura libre y la otra para el
análisis modal de la estructura empotrada.
3.4.1 PARAMETROS MODALES DE
LA ESTRUCTURA LIBRE
Los resultados de las frecuencias naturales y factores de amortiguamiento
modales se presentan en la tabla 3.2 como u n promedio de los modos de
vibración identificados en cada uno de los diferentes elementos medidos de la
estructura; de tal manera que hay modos de vibración que no tienen efecto sobre
algunos de los elementos medidos. La tabla 3.2 presenta los resultados de las
tres formas de suspensión de la estructura, conseguidas para la simulación de la
condición de frontera libre. En esta tabla, los valores presentados fuera de los
paréntesis representan las frecuencias naturales y los presentados dentro de ellos
representan los factores de amortiguamiento modales.
Tabla 3.
Pag.56
Análisis modo1
Tabla 3.2, Parametros modales de la estructura libre Continuación)
ESPONJAS[Hz]
NYLON [Hz
*-LIGAS
]
1
1
[ Hz ]
Es importante mencionar que cuando se utilizaron la cuerda de nylon y las
ligas, solo se midieron los elementos 1, 3, 8 y 10, de manera que en la tabla 3.2,
donde aparecen (***) significa que estas frecuencias deben existir en otros
elementos distintos a los medidos; mientras que (- - -) significa que no se
encontró la frecuencia.
Enseguida, en la figura 3.11 se presentan las formas modales del elemento
1 en sus dos direcciones medidas, obtenidas del experimento modal utilizando las
ligas comerciales como medio de suspensión
a) dirección X
Figura 3.11: Formas modales del elemento 1 (estructura fibre, caso: ligas comerciales)
Pag. 57
*
Análisis modal
En la figura 3.12 se presentan las formas rmdales del elemento 3 en sus dos
direcciones medidas, obtenidas con la misma suspensión (ligas comerciales)
----___
Figura 3.12: Formas modales del elemento 3 (estructura libre, caso: ligas comerciales).
3.4.2 PARAMETROS MODALES DE LA ESTRUCTURA EMPOTRADA
Del mismo modo que en la sección anterior, los resultados de las
frecuencias naturales y factores de amortiguamiento modales se presentan en la
tabla 3.3 como un promedio, de los resultados obtenidos en los diferentes
elementos medidos de la estructura.
Tabla 3.3:Parámetros modales de la estructura empotrada.
amortiguamiento
["/O]
Pag. 58
Frecuencia natural
Factor de
[Hzl
amortiguamiento ["h]
146.345
2.569
149.299
2.917
156.859
6.395
176.344
2.152
18 1.362
2.727
193.363
3.022
198.955
3.007
-
En la figura 3.13 se presentan las formas modales del elemento 1 en sus dos
direcciones medidas, obtenidas a partir del experimento modal realizado sobre la
estructura empotrada.
a) dirección X
Figura 3.13: Formas modales del elemento 1 (estructura empotrada).
En la figura 3.14 se presentan las formas modales del elemento 3 de la
estructura empotrada en sus dos direcciones medidas.
Pag. 5 9
,-
.
1
f
.......................................................................
- ...
....
.............
....
-.
i1~ ,.~ , ~ . " \ . ? .
.LE+
5
Atidisis modal
.
"\.-.
~~
0015
I
.........
.
~
.... -
....
a) dirección Y
b) dirección 2
Figura 3.14: Formas modales del elemento 3 (estructura empotrada).
En este capítulo se presentó el análisis modal de la estructura para pruebas
de vibración con dos condiciones de frontera diferentes. Esto s e logró mediante
un experimento modal, realizado sobre la estructura, utilizando la técnica del
martillo de impacto. Los parámetros modales de la estructura se estimaron
mediante la aplicación del programa propio MEPFRA1. Además, se presentaron
los resultados obtenidos al aplicar este método.
En el siguiente capítulo s e presentará la comparación y análisis de los
resultados obtenidos por el modelado numérico de la estructura y por la
aplicación del análisis modal.
Pag. 60
*
Análisis de resultados
Capítuio 4
ANÁLISIS DE RESULTADOS
En el capítulo dos fue presentado el modelado por elementos finitos de la
estructura para pruebas de vibración y en el capítulo tres se presentó el análisis
modal realizado sobre esta estructura. En este capítulo se presentan y analizan
los resultados obtenidos de ambos métodos. De igual forma que en los capítulos
anteriores, el análisis de los resultados sera divido en dos partes. La primera
parte corresponde al análisis de resultados de la estructura libre y la segunda a la
estructura empotrada:
4.1 ESTRUCTURA LIBRE
La discusión de los resultados se centrará en la comparación de las
frecuencias naturales obtenidas por el análisis numérico de elementos finitos con
respecto a las frecuencias naturales obtenidas del experimento modal.
Como ya ha
sido mencionado, no
se obtuvieron
los factores de
amortiguamiento modales a partir del modelado, por elementos finitos, de la
estructura en estudio con ALGOR v.12. Por lo tanto, no es posible la comparación
directa entre los amortiguamientos modales estimados por MEPFRA1 y los
resultados del modelo por elementos finitos. Sin embargo, el amortiguamiento
modal estimado por MEPFRA1 puede ser introducido al modelo de elementos
finitos para predecir la respuesta del sistema mecánico a una frecuencia
específica. Por otro lado, si es posible la comparación entre los factores de
amortiguamiento obtenidos a partir de las tres f o r m a s ~ d esuspensión de la
estructura utilizadas para simular la condición libre.
Enseguida, en la tabla 4.1 se presenta la comparación de los resultados
numéricos de las frecuencias naturales de la estructura obtenidas tanto del
Pág. 61
*
Análisis de resuliados
modelado numirico como del experimento modal para la condición de estructura
libre. Para el caso del experimento modal se presentan los resultados de las tres
formas conseguidas de suspensión de la estructura. En la tabla 4.1, los valores
presentados fuera de los paréntesis representan las frecuencias naturales y los
presentados dentro de .ellos representan los factores de amortiguamiento
modales.
Tabla 4.1: Frecuencias naturales de la estructura libre.
Pág. 62
Análisis de resultados
Es importante mencionar que cuando se utilizaron las cuerdas de nylon Y
las ligas, sólo se midieron los elementos 1, 3, 8 y 10, de manera que en la tabla
4.1, donde aparecen asteriscos (***), significa que.estas frecuencias deben existir
en otros elementos distintos a los medidos; mientras que donde aparecen guiones
(- - -), significa que no se encontró la frecuencia. En esta tabla también se
presentan los factores de amortiguamiento correspondientes a cada modo de
vibración (valores entre los paréntesis).
4.1.1
ANALISIS DE RESULTADOS
Los modos de vibración fueron identificados con u n porcentaje de diferencia
no mayor al 3%, en la mayoría de los casos. La diferencia máxima se encontró
para el primer modo de vibración entre el modelo numérico de ALGOR y el
experimento modal que utilizó las esponjas como suspension de la estructura,
siendo esta diferencia de 9.8%. De manera que se ha obtenido muy buen acuerdo
entre la teoria y el experimento con respecto a las frecuencias naturales de los
modos de vibración identificados.
El modelo numérico predijo dos modos .de vibración que no fueron
encontrados en la estructura con los experimentos modales: 12 1.370Hz y
168.128Hz.
Por otro lado, el modelo numérico fue incapaz de predecir la existencia de 4
modos de vibración que fueron encontrados con los experimentos modales:
82.812Hz, 180.216Hz, 184.726Hz y 187.903Hz. La aparición de estos modos en
los experimentos modales se atribuyen a las pequeñas diferencias de simetría que
tiene la estructura (ver sección 4.3) y probablemente 'a los efectos de la soldadura.
En general, se observa u n a correlación muy buena de los resultados del
modelo numérico contra los tres resultados de los experimentos modales. Sin
embargo, en el experimento modal con las esponjas se observa u n a diferencia un
poco mayor para el primer modo de vibración comparado con el modelo numérico
y los experimentos modales de las otras dos aproximaciones. Además, en este
experimento aparecieron dos modos de vibración que no se obtuvieron ni en el
modelo numérico ni en las otras dos aproximaciones del experimento modal:
71.525Hz y 131.533Hz. La aparición de estos modos y la diferencia del primer
modo de vibración se atribuyen a las pequeñas influencias que ejercen las
esponjas, como condición de frontera, sobre el sistema.
Pág. 63
*
Aiiálisis de resultados
Según los resultados obtenidos, s e establece que las tres aproximaciones
conseguidas para realizar el experimento modal simulando condición de frontera
libre, son viables y brindan resultados de precisión confiable. Finalmente, es
importante destacar que los factores de amortiguamiento modales obtenidos
también,fueron consistentes para las tres aproximaciones (ver tabla 4.1).
4.2 ESTRUCTURA EMPOTRADA
De la misma forma que en la sección anterior, la discusión de los resultados
se centrará en la comparacion entre las frecuencias naturales obtenidas por 'el
análisis numérico de elementos finitos y las frecuencias naturales obtenidas del
experimento modal. Los parámetros modales de la estructura empotrada son muy
importantes porque representan el comportamiento dinámico de la estructura
que se utiliza para realizar pruebas de vibración.
Enseguida, en la tabla 4.2 se presenta la comparación de los resultados
numéricos de las frecuencias naturales de la estructura obtenidas tanto del
modelado numérico con ALGOR v.12 como del análisis modal. En esta tabla se
presenta también la diferencia obtenida, en porcentaje, entre los modos de
vibración identificados. En la tabla 4.2, donde aparecen asteriscos (***), significa
que estas frecuencias deben existir en otros elementos distintos a los medidos;
mientras que donde aparecen guiones (- - -), significa que no se encontró la
frecuencia.
4.2.1
ANALISIS DE RESULTADOS
En la tabla 4.2 se observa que tanto en el modelo numérico como en el
experimento modal fueron obtenidos 15 modos de vibración dentro del i n t e n d o
de OHz a 2OOHz.
Fueron identificados 11 modos de vibración, con u n a diferencia no mayor al
2.9% en 10 de los modos identificados. El primer modo identificado tiene una
diferencia de 19%. Es notable la diferencia hallada en el primer modo de
vibración identificado. Según Ewins (1995), las condiciones de frontera afectan
directamente a los modos de vibración más bajos. De aquí que, esta diferencia
puede atribuirse al hecho de que en el modelado numérico de la estructura
empotrada se simuló restricción total de movimiento, en cada u n a de las bases de
ésta, como condición de frontera; mientras que, en la estructura real esta
P6g. 64
*
Análisis de resultados
s
. .
condición de frontera n o ' s e alcanza en su totalidad (fijación mediante u n
conjunto espárrago-tuerca de media pulgada). Resulta fácil deducir esto, puesto
que el incremento de la rigidez en las bases de la estructura empotrada origina un
valor de frecuencia natural de 36.152Hz para el modelo numérico; en tanto que,
el aumento de la rigidez en las bases de la estructura real es menor, por lo que se
alcanza u n a frecuencia natural menor con valor de 30.231 Hz. Además, hay
influencia de la fricción (causada por el contacto entre el suelo y las bases de la
estructura real) sobre los modos de vibración. Esto se deduce por la observación
de u n ligero incremento, en general, de los factores de amortiguamiento modales
de la estructura empotrada con respecto a los de la estructura libre (ver tablas 3.2
y 3.3).
Pag. 65
Análisis de resuliados
A parte de la notable diferencia del primer modo identificado, se h a obtenido
muy buen acuerdo entre los valores de las frecuencias naturales identificadas del
modelo numérico y los de la estructura real.
En los resultados de la tabla 4.2, se observa que el modelo numérico predijo
4 modos de vibración que no fueron encontrados en la estructura con el
experimento modal. También del experimento modal se obtuvieron otros 4 modos
de vibración que el análisis numérico por elementos finitos fue incapaz de
predecir. La aparición de estos .modos de vibración en la estructura r e d se
atribuyen a la pequeña asimetría que posee la estructura (ver sección 4.3).y
probablemente a influencias de la soldadura.
4.3 OBSERVACIONES GENERALES
Se h a podido observar la existencia .'de buena correlación entre los
parámetros modales del modelo numérico y de la estructura real. Por lo que el
modelo numérico desarrollado en esta investigación puede ser tomado como base
para rediseñar la estructura, en caso de ser necesario, para alguna investigación
futura.
Con respecto a las frecuencias naturales, las diferencias obtenidas no
excedieron el 3 YOen la mayoría de los casos. Debe reconocerse que existen varios
factores por los que la estructura r e d y sus soportes difieren del modelo
numérico. Ejemplos de estos factores son: a) la fricción por el contacto entre las
bases de la estructura y el suelo, b) los perfiles con los que está construida la
estructura real pueden tener esfuerzos residudes debidos ai corte y a la
soldadura. Además, estos perfiles pueden diferir en geometría con respecto de la
configuración idealizada utilizada en el modelo numérico.
Más aún, las propiedades mecánicas de los perfiles (densidad, módulo de
Young y módulo de Poisson) n o fueron medidas a partir de los elementos de la
estructura. Estas propiedades utilizadas en el modelo numérico fueron tomadas
de la base de datos de ALGOR v.12 para un acero ASTM-A36 y estas pueden
diferir de las propiedades reales. En la experiencia de algunos autores (Singal et
al., 1992) estos factores pueden fácilmente introducir una diferencia de 3%.
Otro factor qu'e provoca un pequeño grado de diferencia, entre los resultados
del modelo numérico y los del experimento modal, es que las propiedades de
Pág. 66
amortiguamiento son generalmente artificiales u omitidas en su totalidad (como
en esta investigación) por el análisis de elementos finitos.
En secciones anteriores se ha mencionado que la estructura posee cierto
grado de asimetria. En esta investigación se llegó a esa conclusión mediante el
análisis visual de las funciones de receptancia experimentales, donde se
observaron diferencias en la forma de las FRF's entre elementos homólogos y en
la cantidad de modos presentes en dichos elementos. Esto puede deberse a
pequeñas diferencias en la geometría de los elementos, a pequeñas fallas en las
uniones soldadas y esfuerzos residuales en algunos elementos. En las figuras 4. I
y 4.2 se muestra u n comparativo de dos funciones de receptancia medidas en los
elementos homólogos 1 y 8 de la estructura empotrada (ver figura 3.6, sección
3.2.3)para el mismo nodo,
a) elemento 1
b) elemento 8
Figura 4. I : Funciones d e receptancia (nodo 51,dirección X (estructura empotrada)
nx
,/
'
'
.
'
ib
a) elemento 1
b) elemento 8
Figura 4.2: Funciones d e receptancia (nodo 51,dirección Z (estructura empotrada).
Lo anterior explica, de alguna manera, la existencia de modos de vibración
obtenidos en el experimento modal que el modelo numérico no fue capaz de
Pug. 67
Atiálisis d t rcsu!!ador
predecir, puesto que éste fue considerado simétrico tanto geométricamente
en las propiectades de los materiales (material isotrópico).
De las observaciones anteriores se hace evidente que el método de
elementos finitos predice las características de vibración por medios teóricos de
manera que ninguna instalación experimental se necesita. Este puede emplear
un gran número de,coordenadas de manera que. las características de vibración
pueden ser descritas en detalle y pueden cubrir u n amplio intervalo de
frecuencias. En adición, puede ser usado en la fase de diseño para predecir el
comportamiento vibratorio de una estructura futura y, posiblemente, modificar el
proyecto original. Sin embargo, debido a la crucial complejidad de las estructuras
reales y especialmente las uniones entre los componentes, el modelado de la
masa y la rigidez pueden resultar imprecisas o incorrectas.
Por otro lado, se supone al experimento modal como el que identifica las
características de vibración reales de una estructura (dentro de los límites de
precisión de la medición). Sin embargo, debido a la información limitada que
puede ser medida en el experimento modal se obtiene, generalmente, una
descripción incompleta.
Finalmente, cabe destacar que el valor del primer modo de vibración medido
en la estructura empotrada (30.231Hz) da una explicación al problema de
medición que encontró Martinez (1999) en su investigación del fenómeno de
impacto en vigas. Como se menciona en el estado del arte, Martinez (1999)
observó que cerca de la zona de 30Hz existía u n salto en la frecuencia provocando
que no se tuvieran lecturas'en la medición del fenómeno de impacto. Él consideró
que este salto podría ser provocado por algún parámetro del sistema. En efecto, la
causa de este fenómeno se debió a que Martinez (1999)utilizó u n a excitación que
alcanzó la frecuencia natural de la estructura haciéndola entrar en resonancia y,
de esta manera, vibrar en su primera frecuencia natural. Por tanto, el
comportamiento dinámico de la estructura tenía influencia directa en las
mediciones realizadas en esa frecuencia especifica.
Lo anterior comprueba la importancia de conocer el comportamiento
dinámico de las estructuras y de esta manera establecer los intervalos de trabajo
en los que las estructuras son seguras.
Pág. 68
De la tabla 4.2, se puede concluir que el intervalo de trabajo seguro de la
...
.
estructura para realizar pruebas de vibración es: de OHz a 20Hz y de 5GHz a
85Hz, dando u n margen de lOHz antes de alcanzar alguna frecuencia natural.
La estructura presenta gran densidad modal desde 94Hz hasta 200Hz. Por
tanto, las pruebas de vibración realizadas sobre la estructura utilizando
frecuencias excitación dentro de este intervalo, se verían influenciadas por el
comportamiento dinámico de la estructura.
En la siguiente sección se presentan ejemplos de rediseño de la estructura
para modificar sus parámetros modales.
4.4 EJEMPLOS DE
REDISENO DE LA ESTRUCTURA
En secciones anteriores se h a comprobado que el modelo por elementos
finitos de la estructura para pruebas de vibración presenta los resultados de los
modos de vibración con suficiente aproximación a los modos de vibración de la
estructura real. Por tanto, este modelo puede ser utilizado para realizar
modificaciones a la estructura y predecir su comportamiento. La ventaja de
utilizar el modelo por elementos finitos para modificar la estructura es que se
pueden realizar diferentes modificaciones sobre el modelo para obtener una
respuesta esperada. Esto evitará que las modificaciones de la estructura sean
realizadas de manera fisica hasta que el modelo modificado por elementos finitos
presente la respuesta esperada, dando como resultado ahorro de tiempo y ahorro
económico.
Enseguida se presentan dos ejemplos de posibles opciones de rediseílo de la
estructura para pruebas de vibración con la finalidad de modificar sus
parámetros modales. Es necesario subrayar que estas dos opciones representan
la posibilidad y facilidades de poner las modificaciones sobre un modelo discreto
de elementos finitos (cuando éste existe). En esta forma se facilita el diseño
conceptual o rediseílo de una estructura o sistema mecánico.
En la figura 4.3 se presentan los modelos por elementos finitos de las dos
modificaciones realizadas a la estructura. La figura 4.3a presenta el modelo de la
estructura al cual se le quitaron las soleras inclinadas en su parte superior
(modificación 1). La figura 4.3b presenta el modelo de la estructura al c u d se le
agregaron dos placas de acero estructural de un cuarto de pulgada.
Pág. 69
:
Aiidisis de resultados
Figura 4.3: Modelos por elementos finitos d e la estructura rediseñada: a) disminuaóii d e
ngidez (modifcaciónl), b) incremento de masa (modificación 2).
En la tabla 4.3 se presentan los resultados de las frecuenc'ias naturales de
las estructuras rediseriadas. Estos valores se obtuvieron del análisis de vibración
libre realizado sobre los modelos por elementos finitos presentados en la figura
4.3.
Tabla 4.3: Frecuencias naturales d e los modelospor elementos finitos d e la estructura.
Estructura empotrada
Modificación 2
Modificación 1
Frecuencia natural [Hz] . Frecuencia natural [Hz]
Frecuencia natural [Hz]
36.152
26.743
18.294
39.728
32.175
20.206
57.012
41.919
27.824
101.108
10 1.O37
53.856
105.601
104.958
59.730
110.040
109.591
60.61 1
117.579
109.808
6 1.488
126.610
112.285
73.591
140.878
115.583
100.655
153.670
130.553
108.310
Enseguida se presenta el análisis de los resultados de ambos modelos.
4.4.1 ANALISIS DE RESULTADOS DEL PRIMER REDISEÑO
El primer rediseño de la estructura se logró mediante la eliminación de las
cuatro soleras inclinadas soldadas a la estructura. Con esto se consiguió la
disminución de rigidez en la parte superior de la estructura.
Pág. 70
Ariálisls de resulfadm
Los efectos del cambio de rigidez en la estructura se presentan en la
columna dos de la tabla 4.3, donde Se observa disminución de los valores de las
frecuencias naturales con respecto al modelo de la estructura empotrada. Estos
resultados eran esperados, puesto' que la disminución de rigidez en u n sistema
provoca que las 'frecuencias naturales disminuyan s u valor. Esta modificación
resulta útil, por ejemplo, para el caso de que se requiera excitar la estructura
alrededor de los 60Hz.
4.4.2,ANALISIS DE RESULTADOS 'DEL SEGUNDO REDISENO
El segundo rediseño de la estructura se logró mediante la colocación de dos
placas de u n cuarto de pulgada en los extremos de la estructura. Con esto se
consiguió u n incremento de masa en la estructura para provocar u n decremento
mayor de las frecuencias naturales de la estructura.
Los resultados de las frecuencias naturales se presentan en la columna tres
de la tabla 4.3, donde se observa que efectivamente hay un decremento mayor en
las frecuencias naturales de la estructura. Sin embargo, tambien se observa que
hay un incremento en la densidad modal de la estructura. Esto se debe a los
efectos provocados por el comportamiento dinámico de las placas soldadas. Se
concluye que esta modificación no es u n buen rediseño de la estructura porque
disminuye su intervalo de trabajo.
Cabe mencionar que las modificaciones propuestas no tienen una finalidad
específica; sino que sólo se presentan como ejemplos para ilustrar la utilidad de
contar el modelo por elementos finitos de la estructura. Las modificaciones de la
estructura pueden realizarse en el modelo por element.os finitos hasta que se
obtenga la respuesta esperada. Esto evita pérdidas económicas, ya que las
modificaciones a la estructura real solo serán realizadas cuando se haya obtenido
la respuesta requerida del modelo por elementos finitos.
En este capítulo se realizó el análisiS.de los resultados obtenidos del U S O del
método de elementos finitos y del método de análisis modal aplicados a la
estructura para pruebas de vibración del laboratorio de Ingeniería Mecánica del
Cenidet. Además, s e presentaron ejemplos de modificación del diseno del modelo
de la estructura para cambiar sus parámetros modales con el uso ALGOR v.12.
En el siguiente capítulo se presentarán las conclusiones y recomendaciones
obtenidas de esta investigación.
Pág. 71
Conduszories y recomendaciones
Capítulo 5
CONCLUSIONES Y
RECOMENDACIOAES
En la investigación presentada se desarro116 el programa propio de cómputo
MEPFRAl para el monitoreo e identificación dinámica de estructuras y sistemas
mechicos. El programa MEPFRA1 se basa en el método polinomial de fracciones
racionales (RFPM) para estimar los parámetros modales de estructuras y
sistemas mecánicos.
Para evaluar el desempefio del programa MEPFRAl, se realizó el análisis
modal de una estructura soldada que se utiliza para realizar pruebas de vibración
en el laboratorio de Ingeniería Mecánica del Cenidet. Este trabajo consistió en u n
experimento modal sobre la estructura con dos condiciones de frontera
diferentes. La primera fue la simulación de condición de frontera libre sobre la
estructura, es decir, sin restricción alguna de movimiento. Para simular la
condición libre, fueron utilizadas do's técnicas diferentes. La primera consistió en
suspender la estructura sobre esponjas comerciales de baja rigidez (ver figura
3.5a, sección 3.2.2); en la segunda técnica se colgó la estructura con dos
suspensiones diferentes: u n a por medio de ligas comerciales cuya rigidez es baja
(ver figura 3.5b, sección 3.2.2) y la otra mediante cuerdas de nylon de 40kg de
resistencia (ver figura 3.5c, sección 3.2.2).La segunda condición de frontera fue
la fijación que proporciona u n conjunto espárrago-tuerca de media pulgada de
diámetro que sujeta, en cada una de sus cuatro bases, a la estructura en su
lugar de trabajo.
Pág. 1 2
.~
. .
Conclusiones y recomendaciones
El experimento modal se realizó mediante la excitación de la estructura con
un martillo de impacto y la técnica de medición utilizada fue la de referencia
única (SISO).
Los resultados obtenidos de las tres formas de suspensión de la estructura
para la simulación de la condición de frontera libre fueron consistentes,
demostrando así su gran utilidad (ver sección 3.4.I ) .
Para verificar los resultados del programa MEPFRA1, se desarrolló un
modelado numérico de la estructura utilizando el método de elementos finitos con
el software comercial ALGOR v.12 para obtener sus frecuencias naturales y
formas modales a partir del análisis de vibración libre. De la misma forma que en
el experimento modal, la estructura fue modelada con dos condiciones de frontera
diferentes: una llamada estructura libre y la otra llamada estructura empotrada.
La estructura libre se analizó sin restricción de movimiento alguna. La estructura
empotrada se analizó con restricción total de movimiento en cada una de sus
cuatro bases; esta condición de frontera simuló la condición real de trabajo de la
estructura.
Los resultados de ambas aproximaciones, numérica y experimental, en
general presentan buen acuerdo; por lo que el modelo numérico desarrollado en
esta investigación servirá de base para el rediseño de la estructura, de ser
necesario, en futuros trabajos.
La estructura fue caracterizada dinámicamente dentro del intervalo de OHz
a 200Hz. Por lo que se establece que el intervalo de trabajo seguro de la
estructura para realizar pruebas de vibración es: de OHz a 20Hz y de 50Hz a
85Hz, dando u n margen de lOHz antes de alcanzar alguna frecuencia natural de
la estructura. La estructura presenta gran densidad modal desde 94Hz hasta
200Hz. Por tanto, las pruebas de vibración realizadas sobre la estructura
utilizando frecuencias excitación dentro de este intervalo, se verían influenciadas
por el comportamiento dinámico de la estructura.
Se estableció una metodología para realizar pruebas que permiten
caracterizar dinámicamente estructuras y sistemas mecánicos mediante el
análisis modal. Además, se presentó el modelado de la misma estructura por el
método de elementos finitos utilizando ALGOR v. 12
Pág. 73
-
ConchSiones
recorneridaciones
Se verificó Y comprobó teórica., nLImer1Ca y experimentalmente la utilidad del
Programa MEPFRA1 para el proceso de identikcación dinámica de estructuras,
sistemas y elementos mecánicos.
La implementación del programa MEPFRA 1 constituye u n ahorro económico
importante,
puesto que en la actualidad el software comercial existente de
análisis modal es muy caro.
El programa MEPFRA 1 puede aplicarse para:
1. Aplicación didáctica en los institutos tecnológicos para que los estudiantes
tengan u n a mayor comprensión del fenómeno de vibración en las estructuras
y sistemas mecánicos y adquieran experiencia práctica en las mediciones.
2. Aplicación en los estudios, de vibraciones de sistemas y elementos mecánicos,
realizados por los profesores y estudiantes de maestría y doctorado del
Departamento de Ingeniería Mecánica del Cenidet.
3. Dar servicio, por parte del Departamento de Ingeniería Mecánica del Cenidet,
de monitoreo e identificación del comportamiento dinámico de sistemas
mecánicos y estructuras en la industria. Esto dará u n beneficio económico a
Cenidet.
4 . Obtener beneficio económico vendiendo el código del programa (sin Matlab
V.S.1) y dando asesorías.
Como aportación al Cenidet, en esta investigación
se diseñaron y
construyeron unos soportes de acero estructural que sirven para suspender
objetos, que v a n a ser medidos experimentalmente, con la finalidad de modelar la
condición de frontera libre. Los soportes permiten colgar las estructuras, sistemas
y elementos mecánicos (o sus modificaciones futuras) de hasta 150kg, con el
objetivo de identificar su comportamiento dinámico en la base del análisis modal
y el programa MEPFRA1. En el apéndice A se presenta el dibujo técnico de estos
soportes.
Se recomienda que en el futuro se implementen nuevas rutinas al programa
MEPFRA1 para que pueda estimar parámetros modales de estructuras y sistemas
mecánicos con otros algoritmos, como: el método exponencial complejo, el método
de Ibrahim en el dominio del tiempo y el método de Hilbert.
Además, se recomienda que el código del programa sea codificado en 'otro
lenguaje, como: Fortran o C, para reducir el costo de adquisición del programa;
PIg. 74
Conclusiones y recomendaciones
ya que el paquete de Mstlab es más,caro que los paquetes de programación antes
mencionados:
AGRADECIMIEhTO
Finalmente, se expresa el agradecimiento por el apoyo financiero recibido
por parte de COSNET, para el desarrollo de esta investigación, dentro de los
proyectos: No. 633.99.00-PR, No. 633.99.00.01-PR y No. 430.02-P.
Pág.7s
Bibliografía
A1lemangR.J. and D.L. B r o l n , 1993, Experimental Modal Analysis, Handbook on
Experimental Mechanics, Second Revised Edition, SEM, VCH Publishers, I ~ ~ . ,
U.S.A.
Bathe, 1982, Finite Element Procedures in Engineering Analysis, Prentice Hall,
New Jersey, U.S.A.
Benzley S.E. et al., “Pre- and Post-Processing for the Finite Element Method”,
Finite Elements in Analysis and Design, Volume 19, pp. 243 - 260.
Cid A. J’ Mateos M., 2001, “Método del Gradiente: Ventajas y Limitaciones”,
Iittp://n~~c~n.iirtersaiiir.org/acid/rvpiii
O. htiir
Cortés C., 1997, “Diseño y Construcción de u n Sistema de Excitación Mecánico
para Pruebas de Vibraciones Forzadas con Aplicación en Pruebas ‘ d e
Amortiguamiento por Fricción Seca”, M. C. Tesis, Centro Nacional de
Investigación y Desarrollo Tecnológico, Cuernavaca, México.
De Silva C., 1999, VIBRATION, Fundamentals and Practice, CRC Press, U.S.A
Den Hartog, J.P., 1984, Mecánica de las Vibraciones, Cia. Continental Editorial,
S.A. de C.V. (C.E.C.S.A.),México.
Diego U., 1998, “Análisis Experimental de la Influencia del Impacto en Vigas en
Voladizo Sometidas a Vibración Forzada”, M . C. Tesis, Centro Nacional de
Investigación y Desarrollo Tecnológico, Cuernavaca, México.
Ewins, D.J., 1995, Modal Testing: Theory and Practice, Research Studies Press,
ltd. a n d John Wiley & Sons, inc., Great Britain.
Hewlett
Packard
(HP) 3566A/3567A
Spectrum/Network Analyzer, section 8.
Getting
Started,
1992,
Pc
Huebner K.H., Thornton E.A. and Byrom T.G., 1995, The Finite Element Method
For Engineers, Third Edition, John Wiley & Sons, INC., U.S.A.
Idichandy V.G. and Ganapathy C., 1990, “Modal Parameters for Structural
Integrity Monitoring of Fixed Offshore Platforms”, Experimental Mechanics, pp.
382 - 391.
Kennedy J.B. y Neville A.M., 1982, Estadística para Ciencias e Ingenieria,
segunda edicion, Harla Harper & Row Latinoamericana, México.
Lee M . and Richardson M., 1992, “Determining the Accuracy of Modal Estimation
Methods”, IMAC X,pp. 1 - 5.
Pag. 7 6
Bihliosrajio
Martinez E. et al., 2000, “Aplicación de Topes de Impacto en el Control de las
Vibraciones Mecánicas”, Coloquio Internacional y Reunión de la Academia
Nacional de Ingenieria Mecánica, CIRANIM 2000.’
Martinez E., 1999, “Análisis del impacto en Vigas d e Sección Rectangular
Sometidas a Vibración Forzada”, M. C. Tesis, Centro Nacional de Investigación y
Desarrollo Tecnológico, Cuernavaca, México.
Meirovitch L., 1997, Principles and Techniques of Vibrations, Prentice - Hall Inc.,
U.S.A.
Mendes N.M., 1988, “Extraction of Valid Modal Properties from Measured Data in
Structural Vibrations”, Doctor of Philosophy Thesis, Imperial College, London
SW7, U.K.
Mendes N.M. and Montalvao J . M . , 1998, Theoretical and Experimental Modal
Analysis, Research Studies Press, LTD, Great Britain.
Mitri M . and Morassi A., 1998, “Modal Testing and Structural Identification of a
Planar Truss”, Proceedings of ISMA23, Volume I, pp. 135 - 141.
Phillips C.L. and Nagle H.T., 199.5, Digital Control System: Analysis and Design,
Third Edition, Prentice - Hall, México.
Ramsey K.A., 1983, “Experimental Modal Analysis, Structural Modifications and
FEM Analysis on a Desktop Computer”, Sound and Vibration, pp. 1 - 10.
Rao S . , 199.5, Mechanical Vibrations, Third edition, Addison - Wesley Publishing
Company, U.S.A.
‘
Richardson M.H. and .Formenti D.L., 1982, “Parameter Estimation from
Frequency Response Measurements Using Rational Fraction. Polymomials”, Is‘
IMAC Conference, Orlando, FL, pp. 1 - 15.
Rieger N.F. and Steele J . M . , 1981, “The Basics of Finite - Element Modeling: A
plain - language guide for designers”, Machine Design, pp. 16.5- 170.
Salane H.J. and Baldwin J . W . , 1990, “Changes in Modal Parameters of a Bridge
During Fatigue Testing”, Experimental Mechanics, pp, 109 - 113.
Sanders D.R. et al., 1992, “Nondestructive Evaluation of Damage in Composite
Structures Using Modal Parameters”, Expen’mental Mechanics, pp. 240 - 251
Schwarz B.J. and Richardson M.H., 1999, “Experimental Modal Analysis”, CSI
Reiiabiiity Week, Orlando, FL., pp. 1 - 12.
Singal R.K. et al., 1992, “A comprehensive Analytical Solution for Free Vibration
of Rectangular Plates with Classical Edge Conditions: Experimental Verification”,
Experimental Mechanics, pp. 2 1 - 23.
Pág. 77
Bibliogrqk
Sotelo A., 1995, “Análisis Numérico y Experimental.de1 Impacto en Vigas con
Vibración Transversal”, M. C. Tesis, Centro Nacional de Investigación y Desarrollo
Tecnológico, Cuernavaca, México.
Spyrakos C., 1995, Finite Element Modeling in Engineering Practice, Includes
Examples with ALGOR, Algor Publishing Division, Pittsburgh, PA,
Szwedowicz D. and Soteio A., 1997, “Updating of Impact Models for Vibrating
Cantilever Beams”, Symposium on Model Updating a t the 1997 ASME Design
Engineering Technical Conferences, Sixteenth Biennial Conference on Mechanical
Vibration and Noise, pp. 1 - 6, September 14 - 17, Sacramento California, U.S.A.,
ISBN O-7918-1243-X.
Sm7edowicz D.et al., 1998, “Mediciones Experimentales del Impacto Mecánico”,
4a Reunión Internacional de Ingenieria Mecánica, San Luis Potosi, México, pp. 25 30.
Szwedowicz D. et al., 1999, “Diserio de u n Banco Experimental para Pruebas de
Impacto”, Proceedings of 4a Memoria del ID Congreso Nacional de Ingenieria
Mecánica, Culiacán, México, pp. 107 - 115.
Szwedowicz D., 1997, “Impact Modeling in Lateral Vibration of Cantilevered
Beams Including Friction Dampers”, Modern Practice in Stress and Vibration
Analysis, Proceedings of the 3 r d International Conference on Modern Practice in
Stress and Analysis, Dublin Ireland, pp. 287 - 292.
Smedowicz D.,1998, “Finite Element Impact Simulation of Vibrating Beams”,
Proceedings of ISMA23, Volume 3, pp. 1503 - 1508.
Szwedowicz D.,
200 1, “Experimental Analysis of the lnfluence of Mechanical Fits
on Clamped - Pinned Beam Vibrations”, Proceedings of the 81h International
Congress on Sound and Vibration, J u l y 2 - 6, Hong Kong, China, pp. 2771 - 2778,
ISBN 962-367-323-X.
Tacoma narrows bridge, 200 1,http://cee.carleton.ca/Exhibits/Tacoma-Narro\vs/
Thomson W.T., 1982, Teoría de Vibraciones, Aplicaciones, Prentice Hall
Hispanoamericana, S.A., México.
Wowk V., 1991, Machinery Vibration: Measurement and Analysis, Mc Graw - Hill
lnc., U.S.A.
Xu K.Q., 1997, “Frequency Domain Modal Parameter Identification of High Order
Systems in a Numerically Stable Way”, Journal of Vibralions and Acoustics,
Volume 119, pp, 265 - 270.
Zienkiewicz 0 . C . and Taylor R.L., 1994, El Método de los Elementos Finitos:
Formulación Básica y Problemas Lineales, Volumen 1, Mc Graw-Hill, Espana.
Pag. 78
Apéndice A
En el presente apéndice se presenta el plano técnico de los soportes de acero
estructural construidos para lograr la simulación de la condición de frontera
libre.
.. -~ .
.
~
.
......
..
...
.~ .. ...-. -
.-
~
~
. ..
.. ..
. ...
,
C6x 10.5
2 Piezas
m
.t
d
.
.
.
-\
~.
~.---: Ing. Jesus Medina
Acotaciún: mm
-.
. .
..
(excepio indicaciones) Re,,iso:
~~
~
Cervantes
.. ~ .
CENIDET
~
Escala.
1:5
Dr. Dariusz Szwedowicz Wasik
.
~
~
.~~
~~~
Estructura C6x10.5
~
...
~
.-
~ ~. ..
. .
~
~
-
AC6 01.03.02
~
.
Pág. 19
Apéndice B
VALIDACIÓN TEÓRICA DEL PROGRAMA MEPFRAl
Antes de utilizar el programa MEPFFL41 para ajustar las curvas FRF
experimentales, fue necesario validar la precisión del programa para obtener los
parámetros modales y especialmente la precisión del factor de amortiguamiento
puesto que para las FRF's experimentales no se tiene modo de verificación de este
parámetro. Para validar la precisión del programa se construyeron funciones de
receptancia a partir de modelos teóricos. Enseguida se presentan tres ejemplos y
los resultados correspondientes al ajuste de curvas realizado.
EJEMPLO 1 .
OSCILADOR SIMPLE AMORTIGUADO:
Fuente: De Silva C. W., 1999, Vibration, Fundamentals and Practice, CRC Press,
U.S.A., pp, 48, 49 y 115.
DATOS:
m=4kg
~
1.6 x IO3 N/m
N s/m
Solución:
k - 1600
k
c
=
= 80
w,,
=
, nl
r =2 m,,c
4
= 20 rad I s = 3.183 Hz.
80
= 0.5 = 50%
117
2(20)(4)
Con esta información es posible construir la función de receptancia:
-
Pág. 80
Para w con valores de OHz a lOHz (62.831 rad/s).
Enseguida se muestra el ajuste de curva realizado con el programa MEPFFV.1:
Fase
Frecuencia Natural
(Hz)
3.183
Factor de Amort.
Fase
(Grados)
89.999
(YO)
49.999
desviación
Estándar
4.115 e-10
JMEMPLO 2.
DOS MASASCON A MORTIGUAMIENTO .
Fuente: Ewins, D.J.,1995, Modal Testing: Theow and Practice, John Wiley &
Sons, Great Britain, pp. 42.
(Nota: El problema fue modificado para agregar amortiguamiento viscoso).
m,= m2= 1 ko
..
..
m,
k,= k?= k; = 0.4 Mh'iili
c , = cj= 20 Nsírn
c2= 40 Nsiin
Para este sistema de dos grados de libertad, las ecuaciones de movimiento son:
tit, X,+(C,
X ? + (c,
+c,).~I-(c2)x?+(kl
+ ,,)X2-
(C,)X,+
(A,
+k,)X] -(k,)X2
+ k 3 ) X'
=f,
- ( k , ) XI
= f,
Pág. 81
Ap&dicc B
- 40
1 0
- 0.4
(A4N I ni)
0.8
Considerando vibración libre, es decir, {,f(/)}={O} y asumiendo que existe u n a
-40
solución de la forma
{.(I)}= {*}e'"'
60
- 0.4
i"1
x = -o2{ x } e r W '
; por tanto, e s claro que
Esto da como resultado la siguiente ecuación del sistema no amortiguado:
( [ K I - w ? [M])x-}e'"'= {o}
Para ia cuál existe u n a solución no trivial, solo si:
det'[K]- U' [A41 = O
Sustituyendo valores, se tiene:
a.sXio6
(s2)e'"'
- 0 . 4 ~ 1 0 ~ 0.8~10'
0 . 8 ~ 1 0-~0'
det
[
]
- 0.4~10' ]{(xI)e'"'
- 0 . 4 ~ 1 0 ~ 0.8~10'-coz
0 . 8 ~ 1 0-~co2
{;I
- 0 . 4 ~ 1 0 ~ (]x{I ) é c d f } =
=
(x2)e'"'
- O.4s1O6
-0.4~10~0.8~10
-0'
~
Resolviendo para obtener las raíces del polinomio resultante, se tiene:
= 4x10'
uad/s
w: =12x1O5uadis
Para hallar las formas modales, se sustituye uno a uno el valor de o; y
W;
en:
0 . 8 ~ 1 0- ~
a 2 - 0.4~10' ]{(X,)}={o]
- 0 . 4 ~ 1 0 ~ 0 . 8 ~ 1 0 '- w'
(X2)
Por tanto para o,',se tiene:
})F{
0.8~10'-4~.lO'
- 0.4~.10' ]{("I)} =
- 0.4~10'
0.8~10"- 4 ~ 1 0 ~( X 2 )
0.4.1-1O6 - 0.4~1
O']{(*,)}
=
- 0.4.x106
0 . 4 ~ 1 0 ~(X?)
io)
Póg. 82
resolviendo el sistema de ecuaciones simultáneas:
.II= 1
.Y, '= 1
Para o!;,
se tiene:
0.8~10'- 12.~10'
- 0.4~10'
-0
. 4 ~ 1 0 ~ ]{(xI)} O.XS10' -12x105 ( X * ) -
{O]
- 0 . 4 ~ 1 0 ~- O . ~ X ~ O ~ ] { ( ~ ~ ) } ~ { ~ }
- 0 . 4 ~ 1 0 ' -0.4~10' (I?)
resolviendo el sistema de ecuaciones simultáneas:
=I
x? --I
Así, las matrices eigenvalor y eigenvector son:
XI
o
12s105
Las frecuencias naturales en Hertz, son:
.fl
=
12.XlO'
27r
= 174.345 Hz.
Para obtener la matriz normalizada de las formas modales
matriz de masa, se tiene:
[@I con respecto a la
PI' [ A 4 1 [ . 1 = [ 4
NI' [ C I [ ~ l [c,
= 1
de donde:
Ademas, la matriz eigenvector normalizada con respecto a la masa tiene la
propiedad de:
[ A 4 ] [ 0=
] [I]
Sustituyendo valores, se tiene:
2 0
[&Ir
Pág. 83
La forma modal normalizada es:
0.707 0.707
0.707 -0.707
El factor de amortiguamiento modal es:
6 = C.I.
2 o,171,
~~
2[6320455
<=-
Por tanto:
~~~
~
~~
I[’
O
1095.445 O O]
2
=
[
O
’
0.0456
< ,=1.58%
< ?=4.56%
Con esta información se construye la función de receptancia:
b., b k J
h’
r
. . .~
I
(0.7071)(0.7071)
. ...
= (4x1Oi-o2 +2(j)(0.0158)(632.455)~)
~
~~
~
G(””
~
(0.7071)(0.7071)
+ (12;]0
-I.;’+ );(: (0.0456) ((095.445) o)
~~
0.5. -.
0.5 . .
.~+ .
.
= (4x10’ - o 2+(j)(19,985)w) (12xi05 - o 2+(j)(99.904)
.
~
G(”’’
=74%’
~
~
w)
(0.7071)(0.7071)
~.
- w 2 + 2(j)(O.OiSS)(632.455)~)
.
~
~
Paravalores de w de OHz a 210Hz (1319.468rad/s)
Enseguida se presenta el ajuste de curvas realizado con el programa
MEPFRA 1:
P l g . 84
.
Ayeiidicc
B
Para G ( j a),
I se tiene:
111'
/Y,
Fase
Magnitud
,os resultados obtenidos son:
1 Fact. Amort. 1
CeceDtancia 1 Frec. Nat.
(Hz)
1 100.659
I
174.348
100.659
( YQ)
1.5i9
Constante
Modal
0.498
Fase
Desv.
8.54 le-9
4.560
89.960
I
I
9.538 e-9
1.
Gráfica d e las formas modales
Pag. 85
-
Apéndice B
EJEMPLO 3.
TRES MASAS CON AMQRTIGUAMIENTO: Análisis modal de sistemas de varios
grados de libertad.
Fuente: Ewins, D.J., 1995, Modal Testing: Theorv and Practice, John Wiley 8:
Sons, Great Britain, pp. 58.
(Nota: El problema fue modificado para agregar amortiguamiento).
i
m3 = 1.05 kg.
m l = 1.0 kg.
m2 = 0.95 kg.
k l = k 2 = k 3 = k 4 = k S = k 6 =lOOON/m.
c2 = c3 = 20 Ns/m.
c3 = 80 Ns/m
c l = 100 Ns/m.
Empleando la metodología de solución mostrada en el ejemplo número dos, se
tienen los siguientes resultados:
a) Frecuencias naturales:
31.613
O
O
5.031
O
O
u=[ O
I=[
u
62.385
O ]rdís=[
O
O
64.216
b) Factores de amortiguamiento modales:
0.0270
O
O
2.700
~
0.0118
o
'
O
0.0112
O
O
9.08 , o ~ 2 ~ H e r t z
O
1.180
o
O
%
O
1.120
c) Formas modales normalizadas con respecto a la masa:
0.9838
0.8214 2.5792
- 0.2933 -3.8773
1.0260
0.9759
d) Con e s t a información s e construye la función de receptancia:
' -
Pág. 86
-
:/
ApYtidice B
,
.
(1>.9838)(0.9838)
G(iw)" = (399.4-w' +2(j)(0.0270)(31.613)w)
'
(0.9838)(- 0.8214)
+ ( 3 8 9 1 . 9 - ~ ' + 2(~j)(0.0118)(62.385)~)
~
+ (i12317
-
(0.9838)(2.5792)
.. ... .
.
. .-
-u' +2(,j)(0.0112)(64.216)w)
2.5374
- 0.8080
0.9678
.. + . - .
. + .
..
1999.4- w' + 1.707(j)w) (3891.9 - o 2 + ~ l . 4 7 2 ( j ) w ) (4123.7 -u' + 1.438(i>w)
~
~~
(0.9669)(0.9669)
=1~
- i + 2(j)(0.0270)(31.613j~)
G(jw)?l
(0.9669)(- 0.2933)
~. . . .. -.
-.
+ (q891.9 - w + 2 (j)(O.Oi 18)(62.385)w)
(0.9669)(..3.8773)
~~
~~
+ (4123.7 - o 2 + 2(j)(0.0112)(64.216)~)
-
0.9348
- 0.2835
...
.+ . -. ... . .
+
1.472(,)@)
(igi- w 2 + 1 . 7 0 7 ( j ) ~ ) (3891.9 ~
+
-
.
(1)(0.9759)
~
- ( ~ 9 9 . 4 ~ - 0 +1.707(j)w)
'
- 3.7489
(4123.7 + 1.438());)
.....
~
~~~
(4123.7 -0' +2(,j)(0.0112)(64.216)~)
1
1.0260 ~~.
+
~~
+
~~
(3891.9-w' +1.472(j)w)
+
...
0.9759.
~-~ .
.
~
(4123.7 - w ' + 1 . 4 3 8 ( j ) ~ )
Para valores de w de OHz a 13Hz, aproximadamente 82 r a d / s .
Enseguida se presenta el ajuste de curvas realizado con el programa MEPFFU1:
Pág. s7
-
.Apeiidire B
-
Para G ( j u),I se tiene:
,.CUI*"
I"?,
ID
(2
Magnitud
Para ~ ( j w ) , se
, tiene:
,O'
re .r.,y.".iO".
.M rR .p'io<rF*.""ll
Para G ( j u ) ) ,se tiene:
Pug. 88
Apetidice B
Los resuitac
9
obtenidos
Frec. Nat.
( Hz )
5.031
9.928
m:
Fact. Amort.
9.928
Constante
Fase
1.119
2.699
1
. 0.8081
-2.5375
-0.9352
Desv.
+-+
t---I--1.180
10.220
5.031
1
30.020
-90.000
-90.000
149.750
I
/
1.9727 e-8
1.9764 e-8
90.000
-90.000
9.928
1.180
- 1.0260
10.220
- Om?
E.0 0 , -
-.--
\
Gráfica d e las fomias modales.
Los resultados obtenidos de los 3 ejemplos teóricos demuestran la eficacia y
precisión del programa MEPFRA1 para estimar cada uno de los parámetros
modales, con lo que queda amp1iamente.validado.
Además, debe notarse que se presentaron 3 ejemplos con diferentes
características, en los que el programa MEPFFY.1 demostró lo siguiente:
En el ejemplo 1, se demostró y verificó la capacidad del programa para
estimar la frecuencia natural y amortiguamiento modal de u n alto porcentaje.
En el ejemplo 2, se demostró y verificó la capacidad del programa para
estimar las frecuencias naturales, amortiguamientos modales de porcentaje bajo
y su habilidad para estimar las constantes modales.
Pág. 89
1
1
Por último, en el ejemplo 3 ' s e demostró y verificó la capacidad y precisión
del
programa
para
estimar
las
frecuencias
naturales,
factores
de
amortiguamiento modales y constantes modales de u n sistema de varios grados
de libertad, donde destaca la habilidad del programa para detectar con enorme
precisión la presencia de "modos acoplados" (modos muy cercanos).
Para la construcción de las FRF's teóricas se utilizó u n programa propio,
elaborado en matlab v.5.1. Enseguida se presenta, como muestra, el código
del ejemplo 2, presentado en este apéndice.
utilizado para crear G ( j a)?,
....................
clear
cl c
close all hidden
$%%%%%a%%898a%8b868%%8~
1s 'dat
disp1'Escribe entre cotas e l nombre de los Catos seleccionadoslno
escribas la extension)')
datos = inpui,(");
frf = load (sprintf('%s.cat',ditos));
for n = 1 : 4 2 1
frfl i n , 1)= (0.7071)(0.7071)/1( 1 ~ 5 (frf( n , 1) *2+pi)^2)+(2'1*0.0158.~632.455*
(frf(n,l)*Z*pi) ) ) ;
frfZ(n,i)= (0.7071)(-0.7071)/((12e5;frf(n,l)*2*pi)?2)t(2*i*G,G456*iO95.~45+~frfln,l~*~+pi)~~;
end
frf 1 : ,Z)=frfl( : , l)+frf2(;,1);
diary (sprintf('frf_resultados.m'i)
diary on % &riendo el diario
formit long g
resp = [ frfl:,Z) I
diary o f f % Cierre O s 1 diario
sprintfi' El o r c h i -s o d e silida es f r f -resu1tados.m')
....................
Pug. 90
-~
.. .
Aperidice C
Apéndice C
CdDZGO DEL PROGRAMA MEPFRAl
%METODO POLINOMIAL DE FRACCIONES UCIONALES (RFPM): AJUSTE DE CURVAS
%Programa realizado p o r : Ing. Jesus Medina Cervantes.
%Fecha: 24 de Noviembre d e 2001.
%NOTA: L a s funciones INVFREQS y FREQS, fueran tomadas de
%The Math Works, Inc.
clear
clc; clf; hold off;
close all hidden
forniat long
SZb~eF%S%EBE%g%ra-6%%b$t%eeS$S6S%6Sori-h~?~~~aZg~~?~%%%~8g%~%~?
% . S t $ & % % %ELECCION DEL TIPO DE AJUSTE I S 3 S e ~ ~ , ~ a % % S % e e e E P % % $ % E S % %
seleccionl
=
nenu('EL1GE EL TIPO DE AJUSTE:','UNA FRF','VARIAS FRF'S');
ESolY%eeá%egC%6IEeS%B~~%%%~%~.~F~%%~~%~~eg$ggge~.%g~F%%~%%~%
%g%%?%SEí%%
ELECCION: UNA FRF ? % % e ~ ? ~ F t e h 8 6 ~ e e % B 9 e % ~ ~ % # % ~ ~ % ~ ~ ~ ,
if seleccionl == i
1s Ydat
metodo = 'rfpm';
dis?('Escribe entre cotas el nonbre de los datos seleccionados(no
escribas la'eztensián)')
d a ~ o s= input ( " ) ;
bueno= ' n o ' ;
while bueno== ' n o '
frf = load (sprint:('ks.dat',datos));
[r,cl = size(frf);
.. _ c ==3
I L
d i a r y (sprintf('%s-~s_resultados.m',metodo,datos))
d i s p [ ' AJüSTE DE. CURVA: METODO POLINOMIAL DE FG.CCIONES R W I O N A L Z S '
sprintf('\nArchivo Seleccionado: Ys\n',datos)
frec = frfi:,i);
d f = f r e c ( 3 ) - frec(2);
frf = frf(:,2) i iyfrf(:,3);
VJ -T R = lengrh(frfj;
[< =
j
p,; TR;
-
end
S----------r5p-ocificando el intervalo de frecuencia del i i j v s f e de la
cs;.L,*
--________- s
disp('Seieccioniindo el intervalo de Frecuencia deseado:')
seleccion2 = menu('Elige el modo de selección del intervalo d e
frecuencia:','Dar un plinto en la grafica','Escribirlo');
. _
i i seleccion2 == 1
I
'
pug. 91
figure 1.1)
semilogylfrec li :II
- TR) , abs i frf il:W-T2) ) )
xlabell'frecuencia: I iiz 1');
ylabel('Loq Magnitud: lg/El'i;
title('Se1ecciona el primer penco (frecuencia ninina)')
[x-frml,y]=ginput ( i ! ;
figure ( 1 )
semilogy (frec ( 1: i r ? -TR) , abs (frf( i : W-TR) i )
xlabeli'frecuencia: I H z 1 ' ) ;
ylabei('Log Magnitud: [g/Nl'!;
title('Se1ecciona el segundo punto (frecuencia máxima) ' )
[W TR,yl=ginput (1);
sp;intf ('El intervalo de frecuencia seleccionado es: \n\tf+ec Minima =
X8,4g\n\tfrec Maxima = %8.4g',x-frml,W-TR)
. else
figure ( 1 )
semilogy(frec(l:W_TR),abs(frf( 1 : W - T R ) ) )
titlei'FRF experimental');
xlabeli'frecuencia: [ Hz 1 ' ) ;
ylabel('Log Magnitud: [g/N! ' 1 ;
x-frml = input('Frecuencia Mínima (Hz): ' 1 ;
W TR = inputl'frecuencia Máxima l i i z ) : ' 1 ;
sprintf ('El intervalo de frecuencia seleccionado es:\n\tfrec Minina=
%d\n\tfrec Maxima= %d',x-frml,V-TR)
end
% E % % % Ahora se aisla el intervalo de Frecuencia %I,%%%
x frml = round((x_frmi - min(frec))/df t I ) ;
W-TR
- = round((W-TR - min(frec))/af t 1);
frf F1 = ones(x-frml-l,l); % Ahora se ponen unos a t e s de los
componéntes FRF aislados
frf-F l ( x-frrn1:W-T R ) = frf(x-frm1:W-TR); 6 componentes FRF aislados
fr: F i (W- TSt1:N) = ones(N-(W-TR),l); f Ahora se ponen unos despues de
los componentes FRF aislados
.
%---------------------%
frf = frf F1;
clear frf-Fl
E h S % S E a % % B & € S % % E ~ $ I b % ~ ~ % ~ ~ ~ ~ E € ~ ~ , ~ k ~ ~ % % ~ ~ % ~ ~
S S % S e dan los grados de libertad para el numerador y
f S S para e l polinomio caracteristico (denominador)
figure ( 2 )
5, s +,
subplot ( 2 , 1 , 1 )
semilogy(frec(x-frm1:W-TR),abs(frfix-frmi:W-TR)))
title('FRF ex-erimental: intervalo Seleccionado para el ajuste');
xlrbeli'frecuencia: [ Hz 1 ' ) ;
ylabel('Log Magnitud: [ q / E j ' ) ;
subplot 12,i , 2)
p?otlfrec(x-frml:V?-TR!,irnaglfrf(x-frrn1:h-S R ! ) !
ri:le('GrSiica de picos ?ara establecer el número de frecuencias');
xiabel('3ecuencia: L H z 1');
yiabelI'Farte Imaginaria: í q / S l ' ) ;
dofc = input(';Cuan?os grados de libertad para el Denominzdor?:
(núnero de frecuenciasl'l; % E E L ! O F dcnominador
dofn = input(';Cuantos qrrios d e iibertad ?ara el Numerador?: (ncmero
de residuos)'); % % E D O F numerador
diary o f f h Cierre del Oiario
6 5 s i i. € s 6 E % 'a % F. r, E 5 k E € % . E % % P,it 5 i .! SP c E i 9, % 9, a *. % t 'r r %. b b % a
%-------------procesamienro de 10s Datos - - - - - - - - - - - - - - %
Pág. 92
.,
Apéivficc C
ii L s % b %. % % $, e % 5 % % % 8s.
zE- 3
2'pi*frec(x -frm1:X-?F.) ; i i Convirtiendo la frecuencia a rad/seg E%
C Escalando la frecuencia O f O a i
% Dividiendo por la frecuencia nzxima
wi = w/max(w) ;
/a c
t o- % % n= grado del polinomi? Oei n.umerador
n = dofn'2;
%5%%6 d= grado del polinomio característico
d = dofd'2;
wt = ones (1,length (frf (x-frml:i,J-?Rl 1 ) ;
iter = 50;
% '6 9, % 9. P % '.. % 6 % s. E P, 6 P, +. 6 %
h:=
to1
=o;
Calculo de los residuos y polos de la fraccion racional % % %
(A,3] = invfreqs (frf ( x frml:W-TR), wi,n,d,wt,iter,toll ;
IR-rip,p-rfp, K] = residue ( A ,B ) ; B Residuos y Polos, respectivamente %
P
o--Calculando la Frecuencia Natural y el Factor de Pmorticuamiento -
%%%
--%
Factor >mort -rfp = (-real[?_rfp)./(abs(P-rfp))l+lOO;Renporcentaje del
amort. critico
6 Ahora la frecuencia natural es multipiicada por
8 la frecuencia maxima debido a que las frecuencias fueron
6 escaladas de O a 1 para evitar problemas en
% la funcion "invfrecs.m"
F N rfp = abs[P-rfp)'rnax(w)/[Z*pi);e% convirtiendo la frecuencia a
ii.ert; E%
%á%%%6%6%6%%%%ChS
calcuiando
$%%
las formas modales F % % % % % % S % % % R % % % %
AX= real (R-rfp) 'max í w ) ;
4 X = imaq(R-rfp)+max(w);
6 % % CM= constante modal y fase= Fase a e la constante modal
CM=( í ((AX.-2)t ((EX.'abs ( P - r f p ) *$ax O#)).^2)1 . ^ 0 . 5 ) '2). 13X./abs (2x1 ) ;
fase=angle(R_rfp).*(l8O/pi); % % convirtiendo la fase a grados % %
e - - - - - - - - - -Calculando la Curva ajustaca FRF - - - - - - - - - - 6
frf-r f p = freqs(A,S,wi);
c_. - - - Agregando los componentes conjugados a la FRF y ceros en la ---8
% - - - FRF Experimental truncada - - - %
frf(l:x frmi-ll = O;
ÍrfINtlr = O;
frf(N+2:2*N) = conj (frf(N:-l:Z));
9, Ajuste de la Curva +.
frf-rfp(x-:rni:W -TR) = frf-rfp;
frf-rfp(i:>:-frml -1) = zerosil,x-frnl -1);
frf-rfpiNsl1 = O;
frí-rfp(Ni2:Z'N)
= conj(fr?-rfpí?4:-1:211,;
%--Calculando los Residuos (diferencia) de la FRF ajiistada con
respecto a l a FZ? experimental--%
Residuos = f r f ( x-frm1:W-T H ) - :rf -rfp(x_frml:W-TR);
% - - - - - - - -Grzficando
la FRF ajustada --------- F
+--La fig. 2 nuestra la magnitud de la FRF ajustada (verde) y la FRF
experimental ( a z u l ) - - %
figure(?)
subplot(Z,l,i)
iemiloc-(:rec(x-:rmi:W_TR),
a b s (frfix-frm1:W-Ti?)), frec(x_frml:W_T2) ,abs
(frf r í p ( x í r m 1 : i S i T R J ) )
titie('FRF experimental (linea 'azull, ?RF ajustada (línea verde) ' ) ;
>:labelí ' Frecuencia : I Hz 'I ' ) ;
ylabel('log i.<agnitud: [q/W] ' 1 ;
%--La figura 3 muestrz'la Lase de la FRF ajustada (verde) y la FRF
experinental (azul)--%.
subplot ( 2 , 1 , 2 )
frf-a = angle(frf(x-frmi:W T%))*(I6O/?i);
frf-rfp-a = angle(frf-rfp(x frmi:N-TX) ) + (18O/pi);
p l o t (irec(s_frmi:-T41, Ifrf-a),frec(x-ír~l:w T R ) , Ifrf-rfp-a) i
title('FRF experimental (líñea'azul), FRF ajistada (linea verde) ' 1 ;
xlabel('Frecuencia: [ 3 2 1 ' 1 ;
ylabel('Fase: [grados]' i ;
9,
diary on % Abriendo el diario
9--------D esplegando Resultados en el Diario y en pantalla ---------
format long g
% L o s resultados son:
%Columna 1: Frecuencia Natural resonznte,
%Columna 2: Factor de Amortiguamiento moaai,
%Columna 3: Constante modal,
FN FAniort-ConsM = [F-N-rfp Factor-hart-rfp CM j
%--------C a l cu l-a ndo y Despiegando la Desviacion Estandar - - - - - - - - - e
Desv estandar FR-reqenerala=
s q r t ( (R~siduos'*iiesiduosl
/length (Residuos)I
diary off % Cierre del diario
sprintfi' El archivo de salida (resultados) e s
%s-%s-resultados.m',netodo,datos)
hold off
disp('iFue bueno el ajuste realizado?')
bueno = input('Resp0nda: si (si el ajaste fue bueno), no (si desea
voiver c. reolizar el ajuste) ' , 's');
if bueno == 'si'
disp('GRP.CIAS POR UTiLIZA3.: i-E?FFG.l')
end
if bueno == 'no'
clc; clf; hold off;
close all hidden
end
end
-
~ . % % E % % % % % E $ 9 S A % o e e 8 ~ ~ % ~ ~ ~ ~ F , ~ ~ e ~ ~ ~ , % ~ ~ ~ , ~ ~ ~ ~ ~ % ~
S % % $ % % % % ( ? . k F % ELECCiON: V R R I A S YRF'S F F g g F . e % g k á % h % g ~ e ~ E % a o 6 8 g p
else
is .+dat
meiodo = 'rfpm';
sunareal = O ;
sumzimao = O;
disp('iCuantas FRF serán sumadas?')
numero = input ( ' ) ;
f o r contador = 1: numero
disp('lscribe encre cotas ei nomcre eel archivo seleccionado(no
escribas la extensión)')
aatos = i n p u t ( " ) ;
frf = load (sprin~f('Ss.aat',daLosi);
[r,cj = sizeifr:);
disp('2scribe la posición del nodo seleccionado [ m ] ' )
posicion(contsdor, i) = input ( " ) ;
sumareal = sumareal + frf(:,Z);
sumaimag = sumaimag + frf(:,3];
Pág. 94
~~
f3=f;
..
if c ==3
frec = frf(:,l);
df = frec(3) - freci2);
frf = frf(:,2) t i*frf(:,3);
W -TR = lenqrhifrf);
N = W ?R;
for kz1:W-TR
f (k)=posicion(contador,1);
end
end
if contador==l f l = f ; elseif cantador==2 f2=f; elseif contadOr==3
elseif contador==4 f 4 = f ; elseif contador==5 f5=f; elseif
concador==ó f6=f;
elseif contador==7 f7=f; elseif contador==8 fE=f; elseif
contador==9 f9=f;
elseif contador==lO flG=f;
end
if contador==l frfi=frf; elseif contador==2 frfZ=frf; elseif
contador==3 frf3=frf;
elseif contador==4 frf4=:rf;
eiseif contador==5 frf5=frf; eiseif
contador==ó frfá=frf;
elseif contador==7 frf7=frf; eiseif contador==E frfE=fr:; elseif
contador==9 frf9=frf;
elseif contador==lO frflO=frf;
end
if contador==l color='r'; elseif contador==Z color='y'; eiseif
contador==3 color='m';
elseif contzdor==4 color='c'; eiseif contador==5 color='g';
e l s e i f contador==6 color='b';
elseif contador==7.colo~=':r';
e l s e i f contador==8 color=':y';
elseif con:ador==9
color=':m'; elseif contador==iG color=':c';
elseif contador==ll color=':g'; elseif con:ador==lZ
color=':b';
elseif cor:rador==i3 color='-.r'; elseif contador==14 color='.Y';
.c';
elceif contador==15 color='-.m'; elseif contador==lá color='-
end
fiqure(3)
piot3 ( frec (1: W T 3 ) , f ( 1:i.,i_TR), log (ab5(frf (1:k?-TR) ) ) , color
title('Gráfica de FRF's experimentales: (color NEGRO: FRF
GL033¿) ' ) ;
xlabel('Frecuencia: [ Ez ] I ) ;
zlabel ( ' L o 0 Kügnitud: [ g / N ] ' ) ;
) : l a b e l ( 'oosición [m] ) ;
view([O,O]);
hold on
ena
bueno= 'no';
w h i l e b,eno== 'no'
frf-S U X Ü = s * i r . a r e a l + i'cumaimig;
w-?R=
)
iQ;
figure(3)
ploL3l frec(l:W_TR),f(l:W-?R), log(abs(frf_suma(l:W-~~))),
'4' )
title('Gr6fica de FRF's experimentales: (color NEGRO.: FRY GLOBAL)');
Pág. 95
Apéiidice C
: ..
viabel('irecuencia: [ Ez 1 ' ) ;
.
zlabe? ['Log Magnitud: [ y / i G l ' I ;
ylabel ('poSiciÓn [ml ' 1 ;
view([O,Ol);
hold on
Especificancio el iltervalo de frecuencia del ajuste ce la
- - __- - - ___- 8
disp('Ce1eccionando el intervalo de Frecuencia deseado:')
seleccion2 = menu('E1ige el moco de selección del intervalo de
frecuencir:','Dar un punto en la qrafica','Escribirlo');
if seleccion2 == 1
figure ( 4 )
semilogy(frec(l:W~TR),abslfrf~sumall:W~T~ll~
xlabel I ' Frecuencia : [ H z ] ' j ;
ylabel('Log Magnitud: [g/Nl'l:
title('Se1ecciona el primer punto (frecuencia minimal')
Ix-frml,y]=qinput 11);
figure 1 4 )
semilogy(frec(l:W-TR),abs(frf-suza[l:W-TR)))
xlaSel('Frecuencia: [ Hz i ' ) ;
ylobel ('Log Maqnitud: [ q / N l . ' ) ;
title('Se1ecciona el segundo punto (frecuencir maximal')
[W-TR, y]=ginput I l l ;
sprintf('E1 intervñlo d e frec'uencia seleccionado es:\n\tfrec Minima
= %8,4q\n\tfrec Maxima = %8.49',x_frml,W-TR)
else
figure 1 4 1
semiloqy ( frec ( 1 : W-TR) , abs ( frf-suma ( 1 : IIi-TR) ) 1
+'-.
L ~ L ~ ~ ( ' GLOBAL');
FRF
xlobel('Frecuencia: [ Hz j ' ) ;
ylabel I ' Log Magnitud: [g/N] ' ) ;
x -frml = input ( ' Frecuencia Minima (Hz): ' 1 ;
W-TR = input ('Frecuencia Maxima (Hz): ' ) ;
sprintf('E1 intervalo de frecuencia seleccionado es:\n\tfrec
Minima= %d\n\tfrec Maxima= Bd',x-frml,W-TR)
end
? , % % % % Ahora se aisla el intervalo de Frecuencia % % E % %
>: -f r m l = roundiix-frml - min(frec))/df + 1);
I.? -TH = r o u n d ( ( V J-T R - milIfrec))/df + i ) ;
írf-F l = oneslx-frml-l,i); i ?.hora se ponen lirios a t e s de los
componentes FRF aislados
frf-F l ( x-frm?:W-TR) = f r f -sume(>:
-frm1:iii -TRl; t componentes FRF
aislados
frf Fl (!q T 3 t l : l u ' ) = ones I N - 1% -TR), 1 ) ; % Ahora se ponen unos despues de
los componeñtes FR F aisladas
i.
frf-s u a a = f r f -Fl;
ci err frf - €1
P %.%i
e %'%% 5 S t %5
ii8á~~PSE~ra%--I4á%iiF
dan los grados d e libertad parr el nUmersdor y
bi,?, para e l polinofiio csricterisTico (denominador)?%%
ficure (5)
subplot ( 2 , i, i )
semiloqy(frec(x f r m l : ! < T R ) ,ass (frf-suma (x_irml:W-TR) ) j
title ('FRF GLOJAL: intérvalo seleccionado p a r a el ajuste');
xlabei ('Frecuencia: 1 Hz 1 ' 1 ;
ylabel ('Log Magnitud: [q/l.'] ' ) ;
% $ % Se
Pag. 96
.
-
Apeiidice C
....
,
'
subplot l2,1,2!
plot (frec[x-frml:W_TR),irnag(frf-sum~(x-frml:W-TR)))
title('Gr2fica de picos para establecer el n¿merc d e frecuencias');
xlabeli'frecuencia: [ Hz 1 ' ) ;
ylabel('?arte Imaginaria: [g/Nl'!;
dofd = inputi'icuantos grados de libertad para el Denonlnador?:
[número de frecuencias) ' ) ; %%ED O F denominador
dofn = input(';Cuantos grados de libertad para el Numerador?: (número
de residuos! ' ) ; %%YD O F numerador
diary off i Cierre del diario
for contador= 1:numero
if contador==l
figure(1)
plot3( frec(x-frml:W-TR),fl(x-frml:W -TR),
imag [frfl!x-frml:W-TR) ) , 'w' )
title('FORV&S M O D A L E S ' ) ;
xlabel('Frecuencia: [ Hz I,!;
zlabel('Parte Imaginaria; Lg/Nl');
ylabell'posición del nodo: [ r n l ' ) ;
view([90,0]);
h o l d on
figure (2)
plot3(frec(x-frm1:t'J-TR),fl(x- frm1:W-TR!,
imag(frfl(x frm,l:W-TR!), ' k ' )
MODA LE FORMAS MCIDALES: vista espacial ;
xlabell'Frecuencia: I Hz 1 ' ) ;
zlabel('Parte imaginaria: [ g / N j ' ) ;
ylabel('posición [ml');
view[ ( 2 0 . 3 0 1 ) ;
hold on
elseif contaaor==Z
figure121
plot3(frec(x -frml:W-TRj,f2(x-frml:W -Ti?),
imag(frfZ(x-frml:W-TR)),'k')
M O D A L E S : vista espacial 9 1 ;
xlabell'frecuencia: [ Hz 1');
zlabeli'Parte imaginaria: [g/Nl'!;
ylabel ( 'posición [ml ' ) ;
view! [20,30]! ;
hold on
figure,(?)
plot31 frec(x-frml:W-TR) , f Z ( x-frm1:W-TR),
imag ( frf2 (x-frml : W ' TR) ) , ',.+ ' )
title('F0RMA~M O D A L E S ' ) ;
xlabel['Frecuencia: [ Hz 1 ' ! ;
zlabel('Parte Imaginaria: [g/N]');
ylsDel['posición del nodo: [ml'!;
-< i ew ( [ 90,O ] ) ;
hold on
elseif contadsr==3
figure(2)
p l o t 3 (frec(x-frml:W-TR) , f3 (x-frml:W-TR) ,
imag(frf?(x frml:W-TR)i,'k'!
title ('FORMAS MODALES : vista e s p a c i o 1 ' 1 ;
xlabel('Frecuencia: [ Fz j ' ) ;
zlabel('Parte imaginaria: [ g / N l ' ! ;
yiabei ('posición [m]' 1 ;
1
I
4
j
i
)
FORMAS AS
Pág. 97
I
.
Apóidicr C
:
view( ( 2 0 , 301 ) ;
hold on
figurell)
plot3( frec(xP:rmi:K -T?) ,f3(>:-frml:VJ-TR),
imag(frf3(x_frml:W TR) ) , ' w ' I
titie('F0RM~sMODPLEC');
xlabel ( 'Frecuencia: I Hz I ' ) ;
zlabel ( 'Parte Imoginaria: [g/N.1 ' I ;
ylabell'posición d e b n o d o : [ n l ' l ;
view í [ g o , 01 i ;
hold on
elseif contador==4.
figure ( 2 )
plot3(frec(x_frrnl:W-TR),:4ix_frml:W
-T R ) ,
imag(frf4(x frml:W-TR) ) , ' k ' l
t i t i e ( ' ~ ~ R P + M.O~D A L E S : vista espacial
xlabel('Frecuencia: [ Hz 1 ' ) ;
zlabel ( 'Parte imaqinaria: [ g / ! i ] ' 1 ;
ylabel ( 'posición [m]' ) ;
view1 [ 2 0 , 3 0 1 ) ;
hold an
figure (11
plot31 frec[x-frml:WPTR),f41x- frml:W-TR),
imag(frf.l(x-frmi:W-TR)), ' w ' )
title('F0RMP.S MODF.LES'1;
xlabel ( Frecuencia: [ Hz 1 ' 1 ;
zlabel('Parte Imaginaria: [ g / N l ' ) ;
),label( 'posición del nodo: I m l ' ) ;
view( [ 9 0 , 0 1 I ;
hold on
elseif cantador==5
figure ( 2 I
P-i ot3 (frec( x-frmi : W-TR) , f5 (x-frm? :W-TR) ,
imag ( f rf 5 (x frml : W-TRI I , ' 1í ' 1
title('~~?.L-q~
MODALSS: vista espacial ' 1 ;
xlabel('Frecuencia:
Hz 1 ' 1 ;
zlabeli 'Parte imaginaria: [g/Iill ' 1 ;
.ylabel( 'posición [ n i l ' ) ;
view ( [ 2 0 , 301 ) ;
hold on
figure (1I
plot3( frec(x_frml:W_TR),f5(x
-frm1:W-TR),
i m a g (frf5(x frml:W TR) ) , ' w ' )
ciíle ( ' FO&P.C
MODALES' ) ;
xlabel('Frecuencia: I Hz 1 ' ) ;
zlabel('Parte imaginaria: [ g / N l ' ) ;
ylabel('posición del nodo: [ n i ] ' ) ;
view( [ g o , O ] ) ;
hold on
elseif con?ador==6
figure(2)
plot?(frec(>:-f r m i : V J -TR),f6(x_frmi:W-T31,
imag (:rf6(x_frml:U_TR) I , ' k ' )
title('~o~!G.s
imD?.LEC: vista espacial ' 1 :
,:label ( ' Frecuencia: 1 Hz I ' ;
zlobel('Parte imaginaria: [ g / I . i ] ' ) ;
yiabel( 'posición [nl ' ) ;
7 ) ;
Pág.98
__
.-
-
Apéiidice C
. .
.
.
view( 1 2 0 . 3 0 1 ) ;
hold on
figure ( 1 )
plot3( frec(x-frml:W-TZ),f6(>:
- frm1:w-T?,),
img(frfó(x frml:TcJ-TR)),'w' 1
titie ( FORKhS M O D A LE S j ;
xlabel('frecuencia: I Hz 1 ' 1 ; .
zlabel('Parte Imaginaria: [g/N]');
ylabeli'posición del nodo: [ m ] ' ) ;
view ( [90,O] ) ;
hold on
elseif contador=='
figure (2)
plot3(frec(x frml:W-TR),f7lx-frm1:W-TR),
imay (frf7( x frml:W-TRI) , ' k ' )
titlei'FORMAS MODALES: vista espacial ' ) ;
xlabel('Frecuencia: [ H z 1 ' ) ;
zlabel ('Parte imaginaria: [g/l.l]' ) ;
ylabel ( 'posición [ m ] ' ) ;
view( (20,301) ;
h o l d on
fipre(1)
plot3(frec(x -frm1:l.l-T ? , ) , Í 7 ( x-frm1:W-TR),
imag(frf7(x_frml:W-?R)),'w' )
title('F0RIJ'S
MODALES');
xlabel ( ' Frecuencia: [ f i z 1 ' ;
zlabel('Parte Imaginaria: ig/Nl');
ylabel('posición del nodo: i r n ] ' ) ;
view([90,0]1;
hold on
elseif contador==E
figure ( 2 )
plot3(frec(~-frml:W_T?,),
f8 (x- frml:M-TR),
inay(frf8 (x frml:W-?Rll,'k')
~ ~ T ~ ~ ( ' F O RMODALES:
M . ~ S vista espacial ' i ;
xlabel ( ' Frecuencia: [ H z I ' ;
zlabel('Parte imaginaria: [g/N]');
ylabel( 'posición in1 ' ) ;
view ( IZO,301 I ;
hold on
figure (1)
plot3(frec(x-frrnl:W-TX),f&(s
-frm1:W-TFI),
inry (frf8(>:-frnil:W-?E) ) , ' w '
title('FOR(i4ASMOD.P..¿EC'j;
>:label ( 'Frecuencia: [ ?z j ' ) ;
'zlabel('Farte Imaginzrio: [y/NJ');
ylabel('posici0n del noco: [m]');
view([90,0]);
hold on
elseii contador==!?
figure ( 2 )
plot3 (frec( x-frnl:W-T?,),5 3 ( x-frml : W-T R ) ,
imag ( :r f9 ( x frml : 16-TR I 1 , ' k ' )
title ( 'FORMAS X G 3 . L E S : vista espacial ' j ;
>:label( 'Frecuencia: [ 2 2 1 ' ) ;
zlabel('Parte inaginariz: [y/Nl ' I ;
ylabel( 'posición [m]' ) ;
3
POg. 99
view((20,301);
hold on
figure ( 1 )
plot3(::ec(x
-f r m l : l , J
irnag(frfY(x frml:V? TRj), ' w '
t i;ie
(
- ._.
~
FO%~F.S MODAES
Apc'tidice C
TR),fY(r: frm1:E-T R ) ,
~
9
) ;
xlabeli'frecuencia: [ Hz 1 ' ) ;
zlabeli'parte imrginaria: [ g / N l ' ) ;
ylabeli'posición del nodo: [m]' ) ;
view ( 190,O] ) ;
hold on
elseif contador==lO
figure (2)
plot3(frec(x-frml:W-TR),flOix -frm1:W-TR),
imag(frflO(x frm1:W T R ) ) , ' k ' )
t i t i e ( ' ~ 0 ~ MMODALES:
A~
vista espacial 0 ) ;
xlabel('Precuencia: 1 Hz 1 ' ) ;
zlabeli'parte imaginaria: [ g / N l ' ) ;
ylabeli'posición 1x11');
view( [20,301 ) ;
hold on
figure ( 1 )
plot3(frec(x frml:W-TR),fiO(x-frml:W-TR),
imag (frfíü (x-frmi :w-TI) ) , w '
t i t le ( ' FORMFiS MODALCS ' ) ;
xlabel('Trecuencia: [ L z 1 ' ) ;
zlabel ('Parte Imaginaria: [ g / N ] ' ) ;
ylabel('p0sición del nodo: [ m i ' ) ;
view( [90,0]);
hold on
end
end
P % % % b Z % % 8 % % % E % % E % % S B ~ ~ ~ ? % ~ ~ % ~ ~ % % ~ ~ , ~ ~ ~ % ~ % % ~ , ~ ~ % % %
%-------------Procesamiento de los D a t o s - - - - - - - - - - - - - - %
%Pe%%$RXee$SS$E%$%B%%etR%a%SEkBBbE%%%B%%~%~~%%%
w
=
2*pi*frec(x frmi:W TR);%% Convirtiendo la frecuencia a rad/seg 9 %
6 Escalando la irecuenzia de O a 1
Dividiendo por la frecuencia maxima
= w/maxiwj;
i s % % % n= grado del polinomio del numerador
n = dofn'2;
$ % % % o d= grido del polinonio crracteristico
d = dofd'2;
wt = ones(l,lengrh(frf-s u m r ( x-frmi:W-TR)) ) ;
%
wi
iter
io1
--*
=
=o;
50;
SF; Calculo de los residuos y polos de la fraccion racional %%a
[P.,B] = invfreqs(fr5-sumi(x-frml:W-T X ) , w i , n , d , w t , i t e r , t o l ) ; .
jñ-rfp, P-rfp, K] = residue (A,O ) ; S Residiios y P o l o s , respectivamente f
c___
Calculando la Frecuencia
NEtural
y el Factor de PmcrtigusrienLo
-
Factor->mort-rfp = !-reall~-rÍp)./[aSs!P_r:p)))'lOO;~en porcentaje del
aniort. critico
i: Ahora la frecuencia natural es multiplicada por
% la frecuencia maxima debido a que las frecuencias fueron
F escaladas de O a 1 para evitar problemas en
F la funcion "invfreqs.m"
Pág. 100
-
. .
Apéndice C
. ..
abs(2-r f ~ ) ~ ~ a ~ , ~ ( ~ . ~convirtiendo
j / ( ~ ~ ? ~ jla
; ~frecuencic.
~
a
F-N -rip =
seltz S E
5 it % P k P 6 P, % % % +. % 5 E % i. E c2 i ciii a ?do 1as formas moda 1 es S % % % k Q F E
P.X= real ( R-r f p ) *ma>:(ii;
!
EX= imag ( R-rfp)'ma,: ( w l ;
C G % CM= constante modal y faso= fase de la constante modal
CM=( ( ( ( P . X . ^ Z ) + ( (BX.'abs(P -rfplimrx(w) . A Z ) ) . * 0 . 5 ) + 2 1 . + (3X./abs(iX)) ;
fase=angle(R_rfp).*(18O/pij; b % convirtiendo la fase a grados % ?
Calculando la Curra ajustada FRF - - - - - - - - - - %
frf-rfp = freqs (A,B, wi);
%--Agregando los componentes conjugados a la FRF y ceros en la - - - %
%--FRF Experimental truncada
frf suma(1:x frml-li = O;
frf-suma(~+iT = O;
frf-surna(NtZ:Z*N) = conj (frf(N:-l:Z!j ;
% Ajuste de la Curva %
frf rfp(x frml:W-TR) = frf-rfp;
frfIrfp(iYx-:rmi
-1) = zeros(i,x-frmi -11;
frf rfp(N+l) = O;
frf-rfp(Nt2:Z'N) = conj(frf-rfp(N:-l:~i);
%--Calculando los Residuos (cifesencia! de la FRF ajusrada con
respecto a la FRF experimenral--5
Residuos = frf-suma(x-fzmí:ti-TRj - frf-rfp(x_frml:W_?~);
%--------Grafl
,cando la FRF ajustada - - - - - - - - - %
%--La f i g . 2 muestra la maqnitud d e la FRF ajustada (verde! y la F3F
experimental (azul)--€
figure ( 6 )
subpiot(Z,i,ll
seniilogy (frec(x-frmi:iV-?R), aDs (frf-suma ( x-frmi :W-?R) ) , frec (x_frmi:W-TX
! , abs (frf rfp (x-frml:W ? R l ) )
:itle(;FRF
GLOBAL (rínea azul) , FRF AJUSTADA (línea verde) ' ! ;
xlabel('Frecuencia: [ Hz 1');
ylabel('Log Magnitud: [g/Nl'!;
%--La figura 3 muestra ia Fase de la FRF ajustada (verde) y la FRF
experimental (azul)--%
subplot 12, i , 2)
fr: -a = angle(frf_suna(x_frml:i~-~~!!*(i8O/pi!;
frf rfo a = angieifrf-rfp(x'frmi:i,$
_
-TRjii(i80/pi);
plof(:;ec(x_:rmi:w
-m ) , (frf-a),frec(x_ frmi:iq-~R!,(frf-rfp-a))
:.:label( 'Frecuencit: [ Ur 1 ' ;
ylabel('iase: [grados] ' 1 ;
+
diary on % Abriendo el diario
i_ _ _ _ _ _ - _ _ 3espleqanco Resultados en el Diario y en pantalla
I
fornat long g
$¿os resultados son:
%Columna 1 : Frecuencia !4stural resonante,
%Columna 2 : Facror d e horiigiismiento modal,
bcoltimna 3: Constance n o r i a l ,
?Id-FPxort -Cons!4 = I F-N_rfp Factor-Fmor:-r:p
CM I
E--------- C;lculrridc y Desplegando la Desviacion Escaridar - Desv-esrancar-FRF-regenerada=
sqrt((Residuos"Residuos!/length(Residuos)!
diary off S Cierre del ciario
sprintf(' El archivo de salida (resultados! es
is-6s-resul:ados.m',metodo,numero!
Apéiidicr C
"
O
S
i
i
r i í t c c
o/.
tf*
Cisp(';%uantos modos fueron identificados?')
modos
=
input
(
'
) ;
for frecs=l:modos
disp('escribe la frecuencia del modo identificadc [ f i r ] ' )
modoid(frecs,l) = input(");
resta(frecs,l)=modoidifrecs,l)-round(modoid!frecs,i));
if a b s (resta(frecs,1 ) )>di
if resta (frecs,1 )> O
division(frecs,l)=rouna(resta(frecs,l)/dÍ);
frecuencia(frecs,l)=round(modcid(Írecs,l))tdivision(frecs,l)*d:;
else
divicion(frecs,l)=abs(round(resta(frecs,l)/df));
frecuencia(frecs,l)=rcund(modoid(frecs,l)) division(frecs, 1)'df;
end
'
else
end
end
frecuencia(frecs,l)=rcund(modcid(frecs,l));
Tsi&~P
r cs óo sE 39 YE oF r4 ' L, C0Y9oPtO
for nuevocontador=l:modos
for ncontador=l:N
if irec (ncontador,1)==frecuencia (nuevocontaaor,1)
for mcontador=i:numero
if mcontador==l
modal (mcontador,l)=imag(Í:-fl incontadcr,1 ) ) ;
elseif mcontador==2
modal (rncontador,l)=irnag (Írf2(ncontadcr,I) ) ;
elseif mcontador==3
modal(rncontador,?)=imag(frf3(nccntador,l)) ;
elseif mcontador==4
nodal(mcontador,l)=irnag(frÍ4 (ncontador,l)) ;
elseif mcontador==5
modal(mcontador, lJ=imag(frf5(ncontador,1 ) 1;
elseif mcontador==ó
rnodal(mcontador,l)=imagifrf6(ncontador,l));
elseif mcontador==7
modal(mcontador,l)=imag(frf7(ncontador,l)) ;
elseif mcontador==8
mocalimcontador, l)=imag(frf8 (ncontador,1)1 ;
elseif mcontador==9.
modal(mccnrador,i)=i~a~(frf~(nco~tador,l!!;
end
elseif ncontador==lO
modal(mcontador,l)=im&g(frflO(ncontador,l));
end
end
enc
. i í naevocontador==l color='r'; elseif nüevocontador==Z
color='y'; eiseif nuevocontacor==3 color='m';
elseif nuevoconcador==4 color='c'; elseif nuevocontador==S
color='g'; elseif nuevocontador==ó color='b';
Pág. 102
elseif
color=':y';
elseif
color=':c';
elseif
color=':b';
elseif
color='-.y';
elseif
..
nuevoconcador==7 color=':r'; elseif nuevocon;ador==8
nuevoconrador==5 color=':rn'; elseif nuevocontador==lO
nuevocontedor==il color=':g" , e l s e i f nuevocontador==?2
nuevoconrador==13 color='-.r'; e l s e i f noevoconcador==l4
nuevocontador==15 color='-.m';
end
for otrocontador=l:numero
frecuencidl(otrocontador,lj=frecuencia(nuevocontador,lj;
end
figure ( 2 )
plot3 (
frecuencFal[l:numero),posicionil:numero),rnodal(l:numero~,color~
title('FORW4S NODALES: vista espacial');
xlabel('Frecuencia: [ iiz 1 ' ) ;
zlabel('Parte imaginaria: [ c / r I j
ylabel('posición [ r n l ' ) ;
view( [20,301 1 ;
hold on
figure(1.1
plot3 (
frecuencial/l:numero),posicion[l:nu~eroj,rnocal~l:numeroj,color
1
tit le ( ' FORMAS MODALES ' ) ;
xlabel ( ' Frecuencia: [ Ez 1 ' 1 ;
zlabei('Parte imaginaria: [g/i\'l ' ) ;
ylabel ('posición del nodo: [ m i j ;
view( [ O O ,O j j ;
hold on
I
)
;
end
for contador=l:numero
modal (contador,l ) = @ ;
end
figure ( 1i
plot3 (
frecuencial(l:numeroj,pcsicion(l:numero),modal(l:numero),':k' 1
title('F0RMP.S MODALES');
xlabel ('Frecuencia: [ Hz I ' ) ;
zlabeli'partí Imaginaria: [ g / N j ' j ;
ylabell'posición del nodo: [ml ' 1 ;
view( [.go, O ] ) ;
hold on
% E Y ;a%?.%
E ie E E
h o l o off
disp(';Fue bueno e l ajuste realizado?')
bueno = input('Resjonca: si (si el aj.uste fue boeno;,
volver a realizar el a j u s t e i ' , ' ~ ' ; ;
if bueno == 'si'
disp('GR3,CIAS POX UTILIZAR: MEPFXAl')
end
no
( s i C€Se2
Pag. 103