Sistemas operativos
Anuncio

Sistemas operativos
TEMA 1 INTRODUCCIÓN A LOS SISTEMAS OPERATIVOS
Tema 1
Introducción a los sistemas
operativos
1. Definición de sistema
operativo
2. Visión histórica
3. Los servicios que ofrece el
sistema operativo
1. DEFINICIÓN DE SISTEMA OPERATIVO
Es muy difícil dar una definición exacta y precisa del término sistema operativo,
por lo que nos será más sencillo formular esta definición a partir de la descripción
de las funciones que éste cumple.
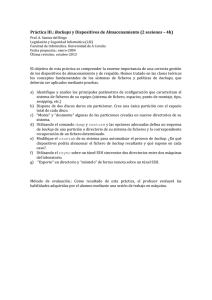
En el esquema superior de un computador, la capa inferior corresponde al
hardware, sobre ésta encontramos justamente el sistema operativo, cuyas
funciones son:
Gestión eficiente de los recursos del sistema: El sistema operativo
controla el acceso eficiente a los recursos del computador: memoria, tiempo en
la CPU, dispositivos, etc, se encarga de trabajos de protección y de utilización
eficiente del sistema. Es decir, el sistema operativo reparte el tiempo de CPU
entre los diferentes programas que concurren en un mismo computador
(incluso de distintos usuarios), consigue una ejecución concurrente, protege el
acceso a memoria y coordina el acceso a dispositivos compartidos e incluso a
los no compartidos.
Presentación a los usuarios de una máquina virtual mucho más
sencilla de utilizar: El sistema operativo proporciona un entorno de trabajo al
usuario y a los programas de aplicación que permite utilizar el computador de
forma más fácil e intuitiva; es decir, se proporciona una máquina virtual mucho
más fácil de entender y utilizar por el hecho de que oculta la complejidad del
hardware.
Como vemos en el dibujo superior, por encima del núcleo del sistema operativo
tenemos el software de sistema (shell, compiladores, editores…) y por encima de
éste, el software de aplicación (hojas de cálculo, editores de texto…).
2. VISIÓN HISTÓRICA
Los sistemas operativos y la evolución del hardware corren íntimamente
relacionadas en su evolución histórica. Es lógico pensarlo así, esencialmente porque
los sistemas operativos han evolucionado en función de los cambios tecnológicos y
a la vez intentaban sacar el mayor provecho de estas nuevas tecnologías.
2 · Sistemas operativos
Vamos a estudiar someramente la evolución de estos sistemas operativos
divididos en 4 generaciones:
Primera generación: Los primeros ordenadores. Solo se contaba en los
momentos iniciales con el hardware del ordenador. Se trataba de válvulas de
vacío que obligaban a fabricar aparatos mostruosamente grandes que se
“alimentaban” de cintas de papel y tarjetas perforadas y cuyo uso estaba
reservado al ámbito militar para efectuar cálculos matemáticos como
trayectorias balísticas y tablas de senos y cosenos. En esta época se
consideraba que no existía sistema operativo y que el usuario interaccionaba
directamente con el computador.
Segunda generación: Con la aparición del transistor en 1950 ya se podían
fabricar computadores más pequeños, pero muy caros y solo al alcance de
unas pocas empresas grandes. Aparecen nuevos dispositivos de
entrada/salida, unidades de almacenamiento (disco y cintas magnéticas),
aparece el primer software (ensambladores, librerías de funciones
matemáticas…) Su modo de funcionamiento era simple. Se cargaba todo el
código del “sistema operativo” y después se realizaban cálculos en lote. Se le
pedía un cálculo y cuando terminaba otro y después otros, todos de forma
lineal; esto hacía perder mucho tiempo de CPU, dado que aunque las CPUs
eran lentas, más lentos aún eran los dispositivos que introducían la información
a evaluar (cintas perforadas). Para intentar reducir el tiempo que estaba parada
la CPU apareció el trabajo off-line, con lo que se intentaban solapar las
operaciones de entrada/salida con la ejecución de programas distintos que se
habían cargado en la CPU a través de una unidad de cinta auxiliar. Luego se
idearon técnicas como el almacenamiento en memoria intermedia, que
consistía en solapar las operaciones de entrada/salida de un programa con las
de cálculo de ese mismo programa. Luego llegó la gestión de colas que
permitían solapar las operaciones de entrada/salida de distintos trabajos
mientras se ejecutaban otras operaciones.
Tercera generación: Surge a mediados de los años 60 y se basa en circuitos
integrados. Son mucho más pequeñas que las anteriores y más rápidas,
apareciendo mecanismos de interrupciones, protección, etc, y además se
desarrollan periféricos más rápidos y efectivos, terminales remotos (acceso a
bancos de datos) y se estandarizan lenguajes de alto nivel ya existentes como
Fortran, algol, cobol. Aparece una nueva forma de trabajar para la CPU que es
la programación concurrente o multiprogramada, donde se solapan
tiempos de mayor entrada/salida con tiempos de cálculo intensivo de la CPU
para distintas operaciones. Cuantos más programas solapemos tendremos un
mayor grado de multiprogramación; debido a esto varios usuarios pueden
conectarse a una misma CPU y “compartirla”, pero para evitar que un usuario
la colapse demasiado tiempo seguido, el programa de un usuario determinado
deja de ejecutarse cuando su programa ha finalizado, cuando se programa una
operación esencialmente de entrada/salida o cuando ha pasado un quantum de
ejecución (tiempo determinado) para que todos tengan acceso a esa CPU, de
esta forma los diferentes usuarios conectados al sistema progresan en sus
operaciones concurrentemente y cada uno de ellos tiene la impresión de que es
el único que utiliza el sistema.
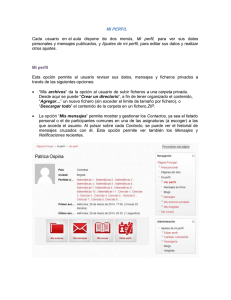
Generación
Tecnología
Programación
Vel. operación
Dispositivos
Ámbito de uso
Primera
1925-1957
Válvulas de vacío
Lenguaje binario o
máquina
Milisegundos
Cintas de papel
Tarjetas perforadas
Militar
Segunda
1958-1964
Transistores
Memorias de ferrita
Fortran, Cobol,
Pascal,
Ensambladores
Microsegundos
Lectores de tarjetas
Impresoras
Unidades de disco
Grandes
corporaciones
Gobiernos
Universidades
Tercera
1964-1974
Circuitos integrados
Sistemas con
multiprogramación
Nanosegundos
Periféricos más
rápidos y efectivos
Empresas medianas
Cuarta
LSI/VLSI
Interconexión con
Redes
Doméstico
Sistemas operativos · 3
1974 – ¿?
Memoria de
semiconductores o
burbujas
bases de memoria
Cuarta generación hasta hoy día: En 1974 se inicia la era de los
computadores personales con la integración a gran escala; y seguramente su
aportación más importante es la red de computadores (internet e intranet).
Aparecen los sistemas operativos en red y distribuidos que permiten
utilizar recursos de máquinas remotas (discos, impresoras…) y aparece también
el sistema operativo en tiempo real (sistemas que deben procesar muchos
datos en un tiempo limitado y lo más rápidamente posible).
3. LOS SERVICIOS QUE OFRECE EL SISTEMA OPERATIVO
El sistema operativo ofrece una gran variedad de servicios, pero que
podemos agrupar en dos bloques:
Llamadas al sistema: Ofrecen soluciones básicas para poder utilizar todos los
recursos de forma correcta y controlada. Encontramos entre estas llamadas al
sistema: gestión de procesos, señalización de procesos, gestión de dispositivos
de entrada/salida, gestión del sistema de archivos y funciones de tiempo.
Intérprete de órdenes: Es el encargado de traducir y comunicar al sistema
operativo lo que quiere hacer el usuario del sistema. Este programa reconoce
un conjunto limitado de órdenes que, básicamente, permiten al usuario
acceder, modificar, crear y proteger la información.
4 · Sistemas operativos
TEMA 2 EL SISTEMA OPERATIVO: UNA MÁQUINA VITUAL
Tema 2
Una introducción a la
máquina virtual
1. UNA INTRODUCCIÓN A LA MÁQUINA VIRTUAL
1.1. El concepto de máquina virtual
El sistema operativo define una máquina virtual sobre la cual los usuarios
pueden trabajar con una mayor comodidad de la que lo harían si trabajasen
directamente sobre los elementos que componen el sistema; es decir el sistema
operativo esconde el hardware mediante una capa de software que tiene dos
objetivos principales:
La abstracción del sistema como un hardware determinado para tener una
visión global y sencilla de la máquina.
Proporcionar un funcionamiento nuevo y seguro, adaptado al usuario que
accede al sistema y además protegido para evitar corromper el funcionamiento
correcto de la máquina.
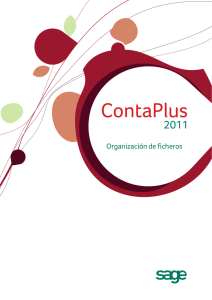
Las capas del sistema que aparecen las podemos observar en la figura
adjunta y se definen en 3 niveles:
Capas del sistema operativo
Intérprete de órdenes: Aquí se
introducen órdenes directamente que son
interpretadas por el sistema de manera
inmediata.
Herramientas del sistema y librerías:
Accesibles mediante el intérprete de
ordenes y también para el programador
como herramientas de apoyo a su labor.
Núcleo
del
sistema
operativo:
Contiene rutinas de gestión del sistema
más relacionadas con el hardware (del
que se encuentra muy muy cerca). El
código que se ejecuta a este nivel lo hace
con privilegios de sistema, es decir como
supervisor.
1.2. El concepto de sesión de trabajo
En los sistemas multiusuario para poder utilizar el sistema se tiene que
iniciar una sesión de trabajo. Es un proceso de identificación que tiene 3 fases:
Entrada en el sistema: o fase de login, donde se le pide al
usuario su nombre de usuario (username) y su contraseña
correspondiente (password). Cuando se introduce el hombre
el sistema operativo lo busca en la lista de usuarios
autorizados (primer nivel de seguridad), cuando lo encuentra
compara la contraseña con la introducida por el usuario
(segundo nivel) y si coinciden le asigna el entorno propio de
ese usuario y se inicia la sesión de trabajo.
Uso del sistema: El usuario interacciona con el intérprete
de órdenes, uso normal del sistema.
Salida del sistema: o logout, el usuario declara que ha
terminado la sesión de trabajo y desea abandonarla, de esta
forma se liberan los recursos que se le tiene asignados y,
por otro lado al cerrar la sesión ningún otro usuario puede
usar la cuenta abierta (la cuenta es el entorno de trabajo y
los privilegios a que tiene acceso por ser ese usuario).
Entrada en el sistema
1. Una introducción a la
máquina virtual
2. Fases de ejecución de un
programa
3. Los espacios de direcciones
de un proceso
4. Los mecanismos de entrada al
sistema operativo: traps,
excepciones e interrupciones
Sistemas operativos · 5
1.3. El intérprete de órdenes
Esquema de funcionamiento
sacar prompt
leer orden
Mientras la orden no sea
“salir” hacer
ejecutar la orden
sacar prompt
leer nueva orden
fin mientras
El intérprete de órdenes es un programa que se encarga de interpretar y
comunicar al sistema lo que el usuario desea hacer; este programa al iniciar una
sesión de trabajo se carga en memoria y no se descarga hasta que no se acaba la
sesión de trabajo. Su esquema de funcionamiento lo vemos en la figura lateral. De
este modo de funcionamiento se desprende que su misión es solicitar de manera
cíclica, mediante un bucle una orden para ejecutar hasta que tenga lugar la de
salir. Existen dos tipos de órdenes: las internas (forman parte del núcleo del
sistema operativo) y las externas (se suelen encontrar en un directorio concreto
del sistema de ficheros o sigue una ruta concreta –path-).
La forma en la que el sistema indica que ya está preparado para recibir
órdenes es escribir en pantalla una combinación de caracteres o prompt, que por
ejemplo en MS-Dos es C:\>. En la actualidad el intérprete de órdenes ha quedado
un poco disimulado por el uso de entornos gráficos basados en ventanas.
Prompt en Ms-Dos y en Windows XP
Las modalidades de ejecución del intérprete de órdenes son:
Primer plano: o foreground: el intérprete de órdenes pasa el control al
programa que corresponde y no lo recupera hasta que finaliza por completo la
ejecución.
Segundo plano: o background: se inicia la ejecución de la orden solicitada
pero concurrentemente se sigue ejecutando el intérprete de órdenes.
Diferidas: Se admite la ejecución de órdenes en un momento especificado
previamente. Por ejemplo los cálculos intensivos o largas simulaciones durante
la noche.
El intérprete de órdenes también se puede utilizar como lenguaje de
programación a través de ficheros de texto (por ejemplo los batch en Ms-Dos) en
los que se pueden guardar una secuencia de órdenes; y también se puede utilizar
como personalizador del entorno de trabajo, ya que cuando un usuario se
identifica (logon) el intérprete de órdenes habilita por defecto las herramientas,
programas, path, etc, que el usuario ha decidido previamente.
1.4. El sistema operativo desde el punto de vista del programador
El usuario se fija en su sistema operativo sobre todo en los programas que
tiene accesibles y en el intérprete de órdenes. En cambio el programador ve los
recursos físicos del sistema y no tanto la capa de software colocada encima. El
programador suele utilizar principalmente las librerías del sistema
(procedimientos de uso común que se añade a sus aplicaciones y que hace
disminuir el código en toda programación) y las llamadas al sistema.
6 · Sistemas operativos
2. LAS FASES DE EJECUCIÓN DE UN PROGRAMA
2.1. El concepto de proceso
Procesos: Programas en ejecución
Existen varias definiciones distintas para el concepto de
proceso, pero una de las más aceptadas es la de “un programa
en ejecución”. Un programa es la descripción detallada para la
resolución de un problema de manera general, en abstracto;
mientras que un proceso es la aplicación en concreto del
programa a un caso particular y en un momento determinado,
con la asignación de unos recursos concretos. Un proceso
determinado es único e irrepetible, mientras que un programa se
puede ejecutar múltiples veces. Por ejemplo, en la figura lateral
se pueden observar parte de los procesos abiertos en este
momento por mi sistema; cada proceso en ejecución es
irrepetible, porque cerrar un proceso y volverlo a abrir ya supone
una instancia diferente del mismo.
2.2. El lenguaje informático
Los programadores escriben sus programas en ficheros de
texto que siguen unas normas de un lenguaje informático
determinado, y que se intenta acercar en la medida de lo posible al lenguaje
natural (más cercano a las personas de habla inglesa que al resto de lenguajes
naturales). Este lenguaje de programación es una convención de sentencias y
estructuras de datos que pueden convertirse en lenguaje máquina (lenguaje que
entiende el computador) y que se pueden ejecutar.
Clasificaremos los distintos tipos de lenguajes en:
Lenguaje de alto nivel: Escribimos las instrucciones en un formato texto muy
cercano al lenguaje natural, aunque con reglas más estrictas. Este lenguaje
luego será traducido por un compilador para pasarlo a lenguaje máquina.
Lenguaje ensamblador: Para simplificar el uso directo del lenguaje máquina
(lenguaje binario de 1 y 0) se han diseñado lenguajes en los que cada
instrucción máquina se corresponde con una instrucción en un lenguaje
mnemotécnico más inteligible. Aun así el lenguaje ensamblador cada día es
más sofisticado y casi resulta inviable programarlo a mano, por lo que esta
tarea tan compleja queda reservado a compiladores y optimizadotes de código.
Código máquina: Las únicas instrucciones que reconoce un procesador son
éstas, en código binario.
2.3. El proceso de creación de un programa ejecutable
En la página siguiente puede observarse una gráfica con todo el proceso de
creación de un programa ejecutable. Vamos a estudiar los distintos pasos:
Edición
En esta fase el programador escribe todas las instrucciones del programa
en un fichero fuente que no es más que un fichero de texto. Para ello puede
utilizar cualquier editor de texto más o menos complejo para su edición. Hay
editores específicos para lenguajes determinados que ayudan a programar,
asignando colores distintos a diferentes partes del programa o comandos, etc.
Compilación (Ensamblaje)
Es el proceso de traducción de un programa escrito en alto nivel a un
equivalente en lenguaje máquina; es decir, desde un fichero fuente, obtenemos un
fichero objeto. A partir de esta fase, independientemente del lenguaje de alto
nivel utilizado C, Java, etc, los ficheros objetos ya estarán escritos en un mismo
“idioma”. Pero el programa no está terminado ya que el fichero objeto no suele ser
único sino que está dividido normalmente en varias partes que facilitan su
Sistemas operativos · 7
manipulación y edición y porque los programas más pequeños de uso común como
cálculos matemáticos y operaciones de entrada/salida se encuentran generalmente
compilados y programados en las librerías.
Proceso de creación de un programa ejecutable
Montaje (Enlazado)
El montaje es el proceso que se encarga de
agrupar todos los módulos correspondientes a un
programa, así como las librerías (si hacen falta)
para construir un único programa ejecutable.
También se llaman enlazadores porque su principal
misión es resolver las direcciones externas entre los
módulos, así como con la librería; con lo que
obtenemos un programa ejecutable definitivo con
un espacio lógico de direcciones que está
completamente construido. El encabezamiento de
este fichero contiene información relativa al
procedimiento que hay que seguir para cargarlo en
memoria.
Carga
La principal tarea del cargador es buscar los
recursos que solicita el programa ejecutable
(incluida la memoria). Así que el cargador adapta
las direcciones lógicas de los programas ejecutables
a direcciones físicas de la memoria real del sistema.
Además transfiere el control a la primera instrucción
del programa y marca el proceso como preparado.
Ejecución (Depuración)
Los programas depuradores controlan la ejecución del programa, por lo que
el programador puede fijar los puntos de detención de la ejecución y estudiar si se
va desarrollando la ejecución adecuadamente, así pueden limitarse los puntos en
los que aparecen errores e intentar subsanarlos.
2.4. Las librerías de sistema
En el proceso de creación del programa ejecutable hemos hecho varias
veces referencia a las librerías del sistema; éstas son un conjunto de módulos
objeto organizadas de manera adecuada y suministradas por el fabricante del
sistema operativo. Contienen las denominaciones de procedimientos, parámetros
necesarios y formas en las que pasarlos para poder disponer de muchos más
métodos para ejecutar nuestros programas ejecutables y, de paso, ahorrarnos
líneas de código.
Existen tres grandes familias de librerías a nuestra disposición:
Librerías estándar: Son las más genéricas y sus áreas más comunes son la
gestión de ficheros, dispositivos de entrada/salida, funciones matemáticas,
manejo de ficheros, etc.
Librerías especializadas: Son opcionales y se añaden al sistema para
resolver problemas específicos, por ejemplo librerías de cálculos matemáticos
complejos, de cálculos estadísticos y se suelen emplear específicamente en
entornos industriales.
Librerías de llamadas al sistema operativo: Adaptamos nuestro programa
ejecutable al formato de llamadas, parámetros, etc del sistema operativo que
utilizamos. Eso sí, solo podremos hacer esas llamadas que el sistema operativo
que se está ejecutando nos permita.
8 · Sistemas operativos
3. LOS ESPACIOS DE DIRECCIONES EN UN PROCESO
Un programa reubicable es aquel que se puede ejecutar en diferentes
direcciones que le son asignadas por el cargador del programa. Así podemos
distinguir dos tipos de direcciones de memoria:
Direcciones lógicas: Son las referenciadas por el programador. Son por tanto
referencias locales y no reales.
Direcciones físicas: Son las direcciones asignadas en tiempo de carga, es
decir, el lugar donde realmente residirá el proceso durante su ejecución.
Obviamente la propiedad de la reubicación hace referencia a la capacidad de
cargar y después ejecutar un programa en cualquier posición de la memoria. Ello
hace necesario un mecanismo de traducción entre las direcciones lógicas y físicas
en la memoria y se puede llevar a cabo a través de dos sistemas:
Reubicación estática: Se realiza antes o justo durante la carga del programa
en la memoria. La línea inicial de carga suele reverenciarse como 0 y a partir de
ella el resto de direcciones del programa serán direcciones lógicas relativas a
esta línea inicial. Tras ser cargado ya no hay diferencia entre direcciones
lógicas y físicas; el problema de esto es que si el proceso por alguna razón
tiene que salir del espacio físico asignado, o bien vuelve luego exactamente al
mismo sitio o tiene que volverse a cargar desde el principio. A causa de este
problema este formato de reubicación se limita a “ciertos” sistemas operativos.
Reubicación dinámica: La transformación entre las direcciones físicas y
lógicas se efectúa en tiempo de ejecución y no en tiempo de carga. Se puede
por tanto cargar en cualquier posición de memoria y una parte del hardware es
el encargado de hacer el trabajo de reubicación. Para ello suele utilizar los
registros de base más la dirección lógica y resulta completamente transparente
para el programador.
4. LOS MECANISMOS DE ENTRADA AL SISTEMA OPERATIVO: TRAPS EXCEPCIONES
E INTERRUPCIONES
Vamos a estudiar en este punto la llamada a los servicios del sistema
operativo en tiempo de ejecución. Lo que se hace es ceder el control de la
ejecución a una parte del código que se ejecuta en el núcleo (kernel o corazón) del
sistema operativo. Es como si hiciéramos una llamada a cualquier subrutina de una
aplicación pero ejecutada en modo sistema; porque así tiene una mayor capacidad
para gestionar sus propios recursos del sistema, el código está mucho más
depurado y resulta más fiable, ya que es código del propio sistema operativo el que
estamos utilizando.
4.1. Las rutinas de servicio del sistema operativo
Las rutinas de servicio son funcionalidades que puede ejecutar el
procesador y que hace lleva a cabo al hardware operaciones realmente complicadas
pero con la seguridad de que es el propio sistema operativo el que las realiza y
gestiona. Los servicios dependen un poco de cada sistema operativo pero en
general podemos dividirlos en 7 grandes grupos:
Gestión de procesos: Creación, eliminación, suspensión, reanimación y
asignación de procesos, así como la cuota de CPU asignado a cada uno de
ellos.
Señalización entre procesos: En un sistema multitarea el nexo natural de
unión entre las aplicaciones en ejecución, evidentemente es el propio sistema
operativo. Señales, semáforos, regiones críticas…
Gestión de dispositivos de entrada/salida: Crear, abrir y cerrar canales de
entrada/salida, así como leerlos y escribirlos.
Gestión directa de los recursos del sistema: Dependen un poco de cada
sistema operativo, pero suele contar entre otros con la gestión de la memoria
del sistema.
Sistemas operativos · 9
Gestión del sistema de archivos: Crear, eliminar, copiar, cambiar de
nombre ficheros y directorios.
Protecciones: Determina si un servicio determinado se puede dar a un
usuario o no (por ejemplo compartir una impresora o leer un determinado
fichero o escribir sobre él), es más utilizado por los administradores de sistemas
que por los usuarios.
Funciones de tiempo: Referencias temporales de los procesos.
4.2. Los mecanismos de acceso a los servicios
Estudiamos aquí como podemos, voluntariamente desde una aplicación,
acceder a estos servicios del sistema operativo, es decir, como transferir el control
de la CPU al sistema operativo (pasamos de modo usuario normalmente, a modo
supervisor con el consecuente cambio de privilegios). Hay dos métodos:
Puntos fijos: Se realizan las llamadas de manera idéntica a cualquier
procedimiento de usuario, porque entendemos que en el núcleo del sistema
operativo están así codificadas, como meros procedimientos. El problema es
que como el núcleo del sistema operativo se carga en memoria al arrancar el
PC, puede haber problemas para vincular los nombres simbólicos de los
procedimientos con los nombres reales que encontrarán los procesos durante
su actividad; podemos intentar solucionarlo de dos formas:
o Se activa el procedimiento a través de su dirección real, lo cual
representa muchos inconvenientes.
o Se utilizan nombres simbólicos y se suministran las direcciones para las
librerías del sistema.
Ambas soluciones son sensibles a los cambios de ubicación en los
puntos de entrada al sistema operativo, lo que no garantiza la portabilidad
de las aplicaciones durante las distintas versiones de un mismo sistema
operativo o a causa de diferentes configuraciones de software.
Llamadas al supervisor o traps: Se transfiere el control indirectamente para
la utilización de una tabla de direcciones de las rutinas de servicio. En el
momento de la carga el memoria del núcleo del sistema operativo, las entradas
de la tabla de direcciones de las rutinas de servicio se llenan con las direcciones
reales de cada rutina. Si no varían estos números, estaremos garantizando la
portabilidad del código a las diferentes versiones del sistema operativo o a
diferentes configuraciones hardware. Las llamadas al supervisor son
instrucciones hardware especializadas en transferir el control de la ejecución al
sistema operativo (es una clase concreta dentro del conjunto general de
interrupciones del sistema).
4.3. Los mecanismos básicos de transferencia
El control de la ejecución de un código al sistema operativo puede
transferirse por voluntad del proceso en ejecución o por cualquier otro motivo.
Existen tres mecanismos básicos para llevarlo a cabo:
Llamadas explícitas al sistema operativo: Son puntos concretos del código
de usuario donde se realiza una transferencia explícita del control al sistema
operativo, son acontecimientos síncronos.
Excepciones: Son roturas de secuencias no previstas pero provocadas
directamente por la ejecución del mismo código del usuario en curso (por
ejemplo, la división por cero). La interrupción llama a una rutina de servicio y
se intenta solucionar el problema o se informa al sistema operativo de la
situación. No podemos generalizar la situación posterior pero a veces no queda
más remedio que suspender la ejecución del proceso.
Interrupciones: Son sucesos asíncronos totalmente ajenos al proceso en
ejecución, pero su resultado es la transferencia del control de la CPU al sistema
operativo.
10 · Sistemas operativos
4.4. El núcleo del sistema operativo
El núcleo (o kérnel) es la parte del sistema operativo formada por un
conjunto de procesos ubicados siempre en la memoria principal. Se encarga de
gestionar el hardware y de implementar las funciones más básicas de la gestión de
procesos, memoria y entrada/salida. Entre ellas destaca la gestión de las
interrupciones, excepciones y llamadas al supervisor.
El núcleo en sí es solo una pequeña parte del sistema operativo, pero es el
código más utilizado y por ello se carga en la memoria, no todo el sistema
operativo tiene que cargarse en la memoria. En la tabla siguiente se muestra un
diagrama de las posibles formas en las que se puede ejecutar el núcleo.
Gestión de interrupciones
Es conveniente observar que el núcleo del sistema operativo es la parte del
software que guarda una relación mucho más directa y estrecha con el hardware y
por ello este núcleo utiliza todas las herramientas que el hardware puede
ofrecernos. Los mecanismos más significativos que utiliza son los siguientes:
Ejecución en modo privilegiado: Le permite acceder a todos los registros
de control de la máquina y ejecutar instrucciones que en modo normal
provocarían una excepción. Podemos pasar de modo usuario a sistema (como
ya sabemos haciendo una llamada a sistema –por un código en ejecución- o
por una interrupción de hardware), de sistema a usuario (cuando ha acabado la
rutina de servicio del núcleo que habíamos invocado) o de sistema a sistema
(cuando se atiende una interrupción mientras se está ejecutando código del
sistema).
Jerarquización de interrupciones mediante prioridades: Para poder
organizar de manera correcta la urgencia de los servicios que se solicitan al
núcleo es imprescindible que se organicen por prioridades. En la tabla lateral
podemos observar un ejemplo típico de organización de interrupciones.
Prioridad en interrupciones
Sistemas operativos · 11
TEMA 3 LA GESTIÓN DE LA MEMORIA
Tema 3
La gestión de la memoria
1. Las funciones de traducción de
direcciones
2. Los modelos de gestión de la
memoria de asignación contigua
3. Los modelos de gestión de la
memoria de asignación no
contigua
4. La memoria virtual
La gestión de la memoria se encarga básicamente de asignar la memoria
física del sistema, que es finita, a los procesos que lo soliciten. Ningún programa
que se encuentre en el interior del sistema puede ser ejecutado si no se le ha
asignado memoria principal, de ahí su importancia.
Además la gestión de la memoria debe satisfacer dos operaciones que
pueden ser conflictivas: la protección del espacio de direcciones, es decir, que
ningún proceso pudiese acceder al espacio de memoria asignado a otro proceso; y
la compartición de memoria, permitiendo espacios comunes de memoria para
todos los procesos.
1. LAS FUNCIONES DE TRADUCCIÓN DE DIRECCIONES
Recordemos que en un proceso el espacio lógico del mismo es la estructura
que contiene el código, los datos y la pila; mientras que el espacio físico hace
referencia a las direcciones de la memoria donde se carga el espacio lógico
señalado anteriormente, es decir, es el espacio real. También debemos distinguir lo
que es el espacio de direcciones del procesador que son las direcciones que
genera el procesador a la hora de acceder al código, datos y pila del proceso; este
espacio además limita el tamaño de la memoria, ya que determina el número de
posiciones de memoria a las que puede remitir el procesador.
Podemos encontrar los siguientes esquemas de reubicación en memoria
Reubicaciones estáticas
Reubicación estática en tiempo de compilación/montaje: Si es posible
saber de antemano en qué lugar de la memoria física se cargará el proceso, el
compilador genera un código ejecutable que contiene esas direcciones físicas
reales. Así, las direcciones que genera el procesador, coinciden con las
direcciones físicas. En el ejemplo de la figura lateral, podemos observar en el
ejecutable (a) que como sabemos que el proceso se va a cargar a partir de la
dirección @64000 de la memoria física, el compilador se encarga ya de asociar
a la variable la dirección @64066 (ya que ocupaba
la dirección @66 en el código fuente). Lo malo es
esta reubicación es que si quisiéramos que el
proceso se cargase a partir de otra dirección de
memoria distinta habría que compilar de nuevo
todo el programa.
Reubicación estática en tiempo de carga:
Al no ser posible conocer por anticipado el espacio
real de memoria donde se cargará el proceso, el
compilador solo puede contener direcciones
lógicas; pero en tiempo de carga sí se conoce la
dirección y se produce la traducción de direcciones
lógicas a físicas. Al igual que antes, el proceso
lanza direcciones físicas, con la diferencia de que
si quisiéramos situar el proceso en otro lugar de la
memoria, no sería necesario volver a compilar
todo el proceso, aunque sí es necesario volver a
cargarlo. Por tanto, es igual al modelo anterior,
con la diferencia d que el fichero ejecutable
contiene direcciones lógicas, en el ejemplo,
observamos el ejecutable (b).
Reubicación dinámica en tiempo de
ejecución: Implica que la correspondencia entre
el espacio de direcciones lógico y el espacio de direcciones físico se lleva a cabo
12 · Sistemas operativos
Reubicación dinámica
en tiempo de ejecución; ello permite que un proceso tenga
la posibilidad de moverse durante su ejecución de un lugar
de la memoria a otro. También es necesario un hardware
añadido para traducir las direcciones, generalmente
consiste en registros de base que indican la dirección de la
memoria a partir de la cual se ha cargado el proceso de
memoria (puede observarse en la figura de la tabla lateral).
Como notas positivas decir que permite llevar a cabo una
gestión dinámica de los procesos en memoria, permite
reubicarla en otro lugar de la misma y compactarla, permite
el intercambio, la partición del espacio lógico del proceso,
etc.
2. LOS MODELOS DE GESTIÓN DE LA MEMORIA DE
ASIGNACIÓN CONTIGUA
En un principio no existía gestión alguna de la
memoria, es decir, el usuario tenía el control completo de la misma; ello era viable
en sistemas que se dedican a entornos de trabajo muy específicos; pero
completamente inviable en sistemas complejos y compartidos por una gran
cantidad de usuarios.
La primera estructuración de la memoria consiste en dividirla en dos partes,
una partición destinada al sistema operativo y protegida para evitar accesos no
controlados, y otra dedicada al usuario para que pudiese ejecutar los programas.
Debido a que generalmente solo se cargaba un proceso en la memoria, la
compartición no tenía demasiado sentido y la reubicación solía ser estática, dado
que el proceso no dejaba la memoria hasta que no finalizaba su ejecución.
2.1. Las particiones fijas
El primer esquema que se propone para la gestión en la memoria en
sistemas multiprogramados es la partición de la memoria en varios fragmentos
(generalmente de tamaños diferentes): Estas particiones se crean cuando la
máquina arranca y no se puede modificar su tamaño. Una vez definidas las
particiones el sistema necesita guardar la información asociada a cada una de ellas,
como es el inicio, tamaño y estado de ocupación de la misma, y ello lo hace en la
tabla de descripción de particiones (véase tabla lateral).
Cuando se quiere ejecutar un proceso que no está en memoria, se busca
una partición libre y se carga el proceso allí; existen dos políticas de asignación
de memoria:
Cuando hay particiones de memoria libres, se puede asignar a la partición
que se ajusta mejor al tamaño del proceso (recordemos que las particiones
suelen ser de tamaños distintos) o se le asigna la primera partición libre en la
que quepa el proceso. La primera opción optimiza lógicamente el uso del
sistema, pero es más lenta que la segunda.
Cuando no hay particiones de memoria libres, se puede dejar el proceso
pendiente de ejecución y esperar que se libere otro proceso que deje una
partición de memoria lo bastante grande o se puede obligar a un proceso que
está en memoria a dejar libre su partición para que se puede cargar el nuevo
proceso. Esto último es lo que se denomina intercambio del proceso o
swapping. A la hora de volverlo a cargar si la ubicación es estática se hará en
el mismo espacio de memoria que ocupaba anteriormente o se podrá realizar
en una partición cualquiera (en la que quepa, claro está).
Queda claro que en este sistema de particiones fijas, el número de
particiones determina el número máximo de procesos que se pueden tener
Particiones fijas
Sistemas operativos · 13
cargados en memoria simultáneamente y además el tamaño de una partición
determina también el espacio lógico máximo que puede ocupar un proceso;
además un proceso solo podrá ejecutarse si queda libre alguna partición de
memoria con el espacio suficiente para poder cargar en ella el código del proceso.
El principal problema en este tipo de sistemas es la fragmentación
interna, sucede cuando un proceso no utiliza todo el espacio de partición de
memoria para él asignado y por tanto, está haciendo mal uso de la misma. Por
ejemplo, si un proceso ocupa 10K y se carga en una partición de 15K, se forma una
fragmentación interna dentro de la partición de 5K.
Este sistema de particiones fijas es uno de los métodos más sencillos que
soportan la multiprogramación dado que los algoritmos de gestión y asignación de
la memoria son sencillos, rápidos y fiables. Es un método adecuado para los
sistemas en los que se conoce la carga de trabajo y no se produce desarrollo de
nuevos programas, aunque la mayor parte de sus inconvenientes proviene de la
falta de flexibilidad para adaptarse a las necesidades variables del sistema.
2.2. Las particiones variables
Debido a los problemas que generan las particiones fijas, se implementan
las particiones variables para intentar solucionarlos. En este tipo las particiones
variables se crean y se destruyen en función de las variaciones en la carga del
sistema.
Particiones variables
Por ejemplo, cuando se intenta ejecutar un proceso y hay que asignarle
espacio en memoria, es necesario primero saber qué parte de la memoria está
ocupada (inicialmente existe una única partición libre con toda la memoria de la
que pueden disponer los programas de usuario); hecho esto se intenta encontrar
un espacio contiguo de memoria donde quepa el proceso y una vez encontrado se
crea una partición introduciendo la dirección de inicio (base), el tamaño y el estado
en una tabla de descripción de particiones como podemos observar en la figura
lateral. Cuando un proceso finaliza o se retira de la memoria, el sistema libera la
partición e invalida la entrada correspondiente
en la tabla de particiones del sistema.
En cuanto a las políticas de
asignación de la memoria, existen varias de
ellas como puede ser asignar la primera
partición libre donde el proceso pueda caber, la
menor partición de la memoria libre donde
cabe el proceso –ajustando el tamaño lo
máximo posible- etc.
Las ventajas que aporta el sistema de
particiones variables son:
Queda
prácticamente
eliminada
la
fragmentación interna.
Se puede asignar la totalidad de la
memoria a un único proceso y así ejecutar
procesos que requieren mucha memoria.
Podemos soportar y adaptarnos al
crecimiento dinámico de un proceso.
Por el contrario, también existen
desventajas:
Aparece lo que se llama fragmentacion externa, dado que a medida que
finaliza la ejecución de diferentes procesos, la memoria queda fraccionada de
14 · Sistemas operativos
modo que el espacio libre no es contiguo. Por ejemplo, han finalizado dos
procesos no contiguos de 300 y 100 k respectivamente, pero necesitamos
cargar en memoria un proceso de 350 K. Hay espacio suficiente, pero al no ser
contiguo no lo podemos utilizar. Esto se intenta resolver con la compactación
de la memoria, consistente en reorganizar los procesos residentes en
memoria, de modo que todo el espacio libre quede en una única partición. Esto
requiere que los programas cargados en memoria sean de reubicación dinámica
(lógicamente, dado que de lo contrario no los podríamos desplazar en tiempo
de ejecución), y por otro lado la compactación es un proceso muy costoso en
esfuerzo del procesador y en tiempo.
Requiere protocolos de asignación y mantenimiento de las particiones más
complejos que consumen más tiempo y espacio del sistema operativo.
3. LOS MODELOS DE GESTIÓN DE LA MEMORIA DE ASIGNACIÓN NO CONTIGUA
Hasta ahora, los modelos que hemos estudiado eran de asignación
contigua, es decir, cada proceso ocupaba un espacio contiguo de memoria, no
había saltos ni particiones entre los procesos. Pero para una mejor gestión de la
memoria y una mejor optimización de la misma caben dos nuevos modelos, la
segmentación y la paginación.
3.1. La segmentación
En la segmentación, el espacio lógico del proceso se parte en unidades
lógicas denominados segmentos. En la tabla lateral podemos observar como un
mismo proceso ha sido dividido en 4 segmentos: el código, los datos, la pila y el
segmento común, cada uno de ellos con un
tamaño distinto. Cada segmento se compila por Proceso de segmentación
separado y cualquier objeto dentro del
segmento se identifica por el número de
segmento al que pertenece y el desplazamiento
relativo dentro del segmento. Se crea una
tabla de segmentos y también una tabla de
descriptores de segmento asociada a cada
proceso para poder luego acceder a su espacio
real en memoria. Así para acceder a la
subturina2 se identifica con el segmento al que
pertenece y se busca en la tabla de
descriptores de segmento (segmento común:
3) y la posición relativa que ocupa en ese
segmento (100) nos dará la dirección física real
del mismo. Además observamos un proceso de
filtrado o búsqueda de errores. Si el segmento
al que se quiere acceder entra dentro de la
longitud permitida o no. Además podemos
añadir en esta tabla otros campos para permitir
el tipo de acceso: permitido, compartido, etc.
Podemos compartir código de manera sencilla y
útil. Por ejemplo si varios usuarios utilizan un
mismo editor, en lugar de cargar el código del
editor varias veces en memoria se carga una
única vez y se comparte entre todos, eso sí, la
parte del editor que sea específica de un
usuario en concreto no se podrá compartir, y se
tendrá que duplicar.
Como desventaja, decir que la tabla de descriptores generalmente no se
implementa en hardware, sino en software,, lo que hace la gestión de segmentos
algo más lenta.
Sistemas operativos · 15
3.2. La paginación
La paginación es gestionada por el sistema operativo y lo que hace es
dividir el espacio lógico del proceso en partes de tamaño fijo, que reciben el
nombre de páginas. La memoria principal también se dividirá en trozos del tamaño
de una página, denominados frames.
Por ejemplo, partimos de un sistema de
de 10 Kbytes de memoria. El tamaño de una
página es de 1 K; de modo que la memoria
posee un total de 10 frames. El espacio lógico
del proceso que queremos añadir a la memoria
tiene un máximo de 4 K, por lo tanto cuatro
páginas, y ocupará un máximo de 4 frames.
Supongamos que nos encontramos con un
proceso que ocupa 2536 Kbytes, en cuyo caso
ocupará completamente las dos primeras
páginas y una porción de la tercera, dejando la
cuarta completamente vacía. El sistema busca 3
frames libres de la memoria (que no tienen que
ser contiguos) y establece la correspondencia
entre página y frame, en la llamada tabla de
páginas. Cada entrada de la tabla de páginas
tiene asociado un bit que se conoce como bit de
validez V, que indica si la página contiene información válida para el proceso o no.
En nuestro ejemplo las tres primeras páginas tendrán bit V a 1, y la última estará a
0.
Paginación de un proceso en 4 páginas
Igualmente, para saber si un frame de memoria está libre o no, el sistema
dispone de una tabla de frames donde se indica su estado y otra serie de bits
para indicar información referente a punteros, protección, compartición, etc.
Esta tabla de páginas se implementa por software y por lo tanto necesita
dos accesos a memoria: un primer acceso para examinar la tabla de páginas y
obtener la dirección física del objeto que se quiere consultar y un segundo acceso
para llegar al objeto en cuestión.
Este sistema al igual que los anteriores tiene ventajas y desventajas:
Se evita la fragmentación externa, aunque observamos que se genera cierta
fragmentación interna. Normalmente el último frame de un proceso no estará
lleno del todo –es muy difícil que coincida el tamaño de un proceso con
múltiplos de 1024 bits-. Eso sí, el problema es mucho menor que en particiones
variables dado que el espacio despreciado siempre será muy pequeño.
Cuanto menor sean las páginas/frames en tamaño, menos espacio se
desperdiciará, pero a cambio aumentará en memoria el sistema para las tablas
de páginas de todos los procesos, lo que lo puede hacer algo lento.
Con bits de acceso controlado en la tabla de páginas, podemos conseguir un
acceso controlado, compartido, permitido, etc., a cada página, pero como la
división en páginas se hace de manera mecánica –por tamaño- y no por tipo de
datos (código, pila, etc) se complica en modo extremo. Habría que conseguir
que los datos, el código, y demás, ocuparan las mismas páginas lógicas y que
no se produjesen mezclas, lo cual complica bastante la protección de la
información.
16 · Sistemas operativos
4. LA MEMORIA VIRTUAL
Hasta ahora todos los procesos estudiados se cargaban completamente en
la memoria para poder ejecutarse. Con la memoria virtual lo que vamos a
pretender es que un proceso solo se cargue parcialmente en la memoria, mientras
que se mantiene una imagen del espacio lógico del proceso en la memoria
secundario, preferentemente el disco duro. El sistema operativo toma la decisión de
qué parte del proceso resulta imprescindible cargar para su ejecución y lo hará en
función de la carga y disponibilidad.
La memoria se puede implementar igual que la segmentación o paginación
en memoria que hemos visto en los puntos anteriores, la única diferencia es que
hay que añadir algunos campos más en cada entrada de la tabla de páginas o
segmentos para indicar si la página o el segmento se encuentra cargado o no en la
memoria principal, estos campos son el bit de presencia P que indica si la página
está cargada en la memoria física (bit 1) o no está cargada (0); lo habitual es que
no haya ninguna página cargada y lo vayan haciendo a medida que se van
necesitando. Previamente a esto se estudia el bit de validez V, para saber si la
dirección que se ha dado es válida. También es necesaria una tabla de páginas
de la memoria secundaria para poder ser consultada. En fin, el proceso sería
como sigue y como podemos observar en la figura siguiente:
Carga de páginas en la memoria virtual
Se observa el bit de validez para ver si la dirección es correcta.
Se observa el bit de presencia P para saber si está o no cargada en memoria.
En caso de que no está cargada debe buscar en el disco y en la tabla de
páginas de memoria secundaria para cargarla. La política de carga de
páginas determina si debemos cargar las páginas solo cuando se han
solicitado y no se encuentran en la memoria principal (bajo demanda), o
también se puede adelantar trabajo aprovechando la localización espacial de
los programas.
Para cargarla es necesario que existan frames libres, de no ser así dependiendo
de la política de sustitución de páginas habrá que desalojar alguna de la
memoria principal para subir la que necesitamos en ese momento.
Sistemas operativos · 17
TEMA 4 LOS DISPOSITIVOS DE ENTRADA/SALIDA
Tema 4
Los dispositivos de
entrada/salida
1. El concepto de dispositivo de
entrada/salida
2. Las características de los
dispositivos
3. Los dispositivos reales
4. La independencia de los
dispositivos
5. La gestión de dispositivos en
UNIX
1. EL CONCEPTO DE DISPOSITIVO DE ENTRADA/SALIDA
El concepto de dispositivo de entrada/salida se asocia al de periférico, como
por ejemplo los teclados, pantallas, discos o módems. Pero un dispositivo de
entrada/salida es algo más, es un objeto gestionado por el sistema operativo
sobre el cual los procesos pueden realizar operaciones de lectura/escritura con la
finalidad de obtener, almacenar, mostrar o transferir información.
Dispositivos de
entrada/salida
El sistema operativo se encarga de gestionar tales dispositivos a través de:
Herramientas: Que desarrollan políticas de acceso en función de las
necesidades de los usuarios.
Interfaz de acceso que es independiente de las particularidades de cada uno de
los dispositivos pero a la vez permite explotar todas las características del
mismo.
Entorno portable que permite que las aplicaciones trabajen con los dispositivos
sin tener que modificarlas.
2. LAS CARACTERÍSTICAS DE LOS DISPOSITIVOS
Los dispositivos presentan características singulares que el sistema
operativo tiene que gestionar de diferentes modos. Los hemos clasificado
ateniéndonos a sus características físicas, de acceso y de control, pero es una
clasificación más de las muchas que podríamos haber hecho, debido a la pluralidad
de los dispositivos.
Debido a ello también hemos de tener en cuenta que accedemos a los
dispositivos y los manipulamos con operaciones distintas y con parámetros
distintos; además estos dispositivos según el tipo pueden producir distintos
resultados e incluso dar errores diferentes frente a situaciones análogas.
El sistema operativo es el encargado de independizarnos de todos estos
casos diferentes mediante una gestión de la máquina virtual que hace que toda
esta variedad sea transparente para el usuario.
Las características físicas de los dispositivos son las siguientes:
Extraíbles o fijos: Hay dispositivos fijos como los discos duros y otros
extraíbles como los discos compactos. Los dispositivos extraíbles necesitan un
tratamiento adicional por parte del sistema y de los usuarios, ya que debe
asignarse el dispositivo a un único usuario al mismo tiempo y hay que informar
al sistema del hecho de que se ha insertado o se procederá a extraer el
dispositivo extraíble.
Capacidad de almacenamiento: Se caracteriza por la geometría u
organización del espacio de almacenamiento en sectores, pistas y caras (discos
duros), en bloques (cintas), etc.; también reconocer que el tipo de
almacenamiento puede ser permanente o temporal: permanente como un
disco duro donde queda la información hasta que explícitamente se borra o
temporal como puede ser un fichero temporal (por ejemplo la cola de impresión
de un documento) que cuando acaba su función deja de existir y se borra.
Tipo de unidad de transferencia: Encontramos los dispositivos que
transfieren caracteres como puede ser un terminal o dispositivos que
transfieren bloques de caracteres como es un disco que transfiere como
mínimo 512 caracteres.
Velocidad de transferencia; Suele ser menor que la del procesador, por lo
que éste aplica técnicas que intenten reducir el tiempo de espera:
18 · Sistemas operativos
Buffering o almacenamiento en memoria intermedia: tiene la función
de suavizar la diferencia de velocidades entre el procesador y los
dispositivos, almacenando en una memoria entre el dispositivo y el
procesador los datos que se van a procesar (por ejemplo en la
grabación de un CD).
o Spoolin o gestión de colas: Permite que la entrada/salida de un
proceso tenga un paso intermedio por dispositivos de gran capacidad
de almacenamiento como pueden ser el disco duro. Por ejemplo a la
hora de imprimir un documento relativamente largo se perderá el
control del PC hasta que se haya impreso completamente; como la
impresora es más lenta esto supone un tiempo de desfase enorme, por
lo que se gestiona la impresión mediante la cola de impresión.
Tipo de codificación de la información: Tiene que seguir unas normas de
codificación que dependan de cada dispositivo. Por ejemplo un terminal
orientado a caracteres debe seguir el código ASCII de 7 u 8 bits.
Estructura de la información: Condiciona esto las operaciones que podemos
llevar a cabo con dicha información. Por ejemplo podemos compilar un fichero
fuente, y podemos ejecutar un fichero ejecutable, pero no al revés.
o
Entre las características de acceso se encuentran:
Acceso a dispositivos de entrada/salida: Los dispositivos pueden ser de
entrada, salida o ambos a la vez, y en función de ello tendrá sentido o no una
determinada operación de acceso. Por ejemplo podemos hacer una salida por
impresora, pero es absurdo hacerla sobre un ratón.
Acceso compartido o exclusivo: Un ejemplo de dispositivo exclusivo es la
impresora. Es evidente que no se puede imprimir más de un documento al
mismo tiempo; pero el propio sistema se encarga de proporcionar mecanismos
de exclusión como los semáforos o la compartición que solucionan el problema.
Acceso secuencial, indexado o directo: Según el dispositivo se tendrá
acceso secuencial (una cinta), directo (disco duro) o indexado.
Acceso síncrono o asíncrono: La mayor parte de los dispositivos tienen un
acceso síncrono, es decir, si la información no se encuentra disponible en ese
momento, el proceso que efectúa el acceso esperará hasta que lo esté. Si es
asíncrono, en cambio, el proceso informa que no hay información y continúa
su ejecución (también puede advertir cuando los datos ya estén disponibles).
Otras características: Como son el activar o no el modo de echo, por
ejemplo lo habitual es ver que se introducen los caracteres que se introducen
por el teclado (echo activado) excepto en las password donde no se ve (echo
desactivado). También es útil el modo de edición cooked en el que
determinados caracteres de entrada se interpretan como órdenes y no como
simples caracteres.
Y por último destacan las características de control:
Características del controlador: El sistema controla los periféricos mediante
una serie de puertos que pertenecen al hardware denominado controlador.
Pueden ser muy distintos, por DMA, por interrupciones, por encuesta… El
sistema operativo esconde a los usuarios todas estas particularidades.
Lenguajes de órdenes: Algunos dispositivos utilizan lenguajes de control
específicos como son el lenguaje PostScript para determinadas impresoras
3. LOS DISPOSITIVOS REALES
Un dispositivo real es un dispositivo que existe realmente y que es la
combinación de diferentes elementos de hardware y software, como se puede
observar en la imagen de la página siguiente.
Los dispositivos pueden ser físicos, lógicos o virtuales. Un dispositivo
físico es un dispositivo que existe físicamente y está formado por el periférico + su
Sistemas operativos · 19
hardware de control (parte física) y por el software que lo gestiona (driver). Tipos
de estos dispositivos son las impresoras, teclados, pero también los discos duros, la
memoria RAM, etc. Estos dispositivos son los más evidentes en un sistema y
rápidamente los identificamos como tales.
No sucede lo mismo con un dispositivo lógico,
pues no existe físicamente sino como el resultado de un
software del sistema que crea este dispositivo, están
formados únicamente por su driver. Un ejemplo puede ser la
unidad virtual de DVD/CD que puede crear el software de
grabación Nero para poder montar imágenes de
grabaciones. Otro dispositivo lógico es la ventana, que
combina cuatro dispositivos físicos para existir: pantalla,
memoria, teclado y ratón; pero en sí la ventana es un área
gráfica almacenada en la memoria que se representa total o
parcialmente sobre una ventana.
Dispositivos físicos, lógicos y virtuales
4. LA INDEPENDENCIA DE LOS DISPOSITIVOS
Como programadores nos interesa poder realizar
programas portables, que se adapten a diferentes
situaciones y esta necesidad por supuesto, incluye el
entorno de entrada/salida donde se van a ejecutar. Para ello
debemos independizar el código de los programas con
respecto a los dispositivos que se van a utilizar.
El primer paso para esta independización es la utilización de los
dispositivos virtuales. Un dispositivo virtual es un dispositivo que, a priori, no se
encuentra asociado a ningún dispositivo real, lo utilizará el programador pero sin
saber en principio, sobre qué dispositivo en concreto se van a llevar a cabo las
operaciones que se especifican en él. Más tarde, en la ejecución del programa,
tendrá lugar la asociación entre el dispositivo real y el virtual de dos formas:
Asociación implícita: El sistema y el proceso que ha iniciado la ejecución del
programa se encarga de efectuar la asociación. En general, los dispositivos
virtuales asociados implícitamente se denominan dispositivos estándar y
contamos con el estándar de entrada, el de salida y el de error.
Asociación explícita: Se efectúa la asociación por el mismo programa durante
la ejecución. A partir del momento en que se ha realizado la asociación, el
programa redirigirá todas las entrada/salidas del dispositivo mediante el
dispositivo virtual.
Pero no solo con los dispositivos virtuales conseguimos la independencia de los
programas, ya que si se requieren operaciones específicas de los dispositivos reales
con los cuales están asociados, no hemos ganado nada. Necesitamos operaciones
uniformes es decir, conocer cuales son las operaciones más utilizadas por los
programas y las más comunes en los dispositivos, para poder redefinirlas como un
conjunto de operaciones independientes de las características de los dispositivos.
Encontramos dos grandes tipos de operaciones: las básicas de acceso y las de
control.
Operaciones básicas de acceso: Son dos: leer y escribir y nos tienen que
permitir acceder a la información con independencia del dispositivo. Para que
sean realmente compatibles con todos los dispositivos, debe incluir estas
operaciones el tipo de acceso, el tipo y la estructura de datos que se tiene que
transferir. Las operaciones de acceso leer y escribir quedan así definidas:
o
o
Estado = leer (disp, buff, cont).
Estado = escribir (disp, buff, cont).
20 · Sistemas operativos
Donde disp es el dispositivo virtual sobre el que se quiere trabajar, buff es
la variable desde la cual se extraerán o se introducirán los datos y cont es el
número de datos que hay que transferir. Si no añadimos más parámetros
queda claro que accedemos al mismo tipo de datos, generalmente es el más
elemental y es el byte. El motivo de ello es que no se pueden reconocer todos
los tipos posibles, por más tipos que el sistema reconociese, siempre surgirían
aplicaciones con tipos nuevos; además el Sistema operativo a través de
librerías y herramientas puede hacer que posteriormente esta política se adapte
a situaciones individuales.
Operaciones básicas de control: Hay 3 que son posicionar, abrir y cerrar.
La operación posiciona nos permite efectuar accesos directos dentro de la
información en aquellos dispositivos que lo soporten. En general el orden que
seguimos en una sesión de acceso a un dispositivo es:
o
o
o
Así
o
o
o
Asociar un dispositivo real a uno virtual de manera explícita.
Inicializar las estructuras de datos internos del sistema operativo que
sean necesarias para realizar los accesos (secuencial y directo).
Verificar los derechos de acceso que tiene el proceso sobre el
dispositivo.
las operaciones de control podrían ser:
Estado = posicionar (disp, pos).
Disp = abrir (nombre, op).
Estado = cerrar (disp).
Donde op es el tipo de acceso que se quiere efectuar y nombre es el
nombre del dispositivo real.
5. LA GESTIÓN DE DISPOSITIVOS EN UNIX
UNIX como todos los sistemas operativos, ofrece una visión de los
dispositivos que hace que las características propias de cada uno sean
transparentes para el usuario. El sistema UNIX reconoce dos tipos de dispositivos:
Dispositivos de bloques: Como los discos, cintas y ficheros; permiten el acceso
directo y utiliza una memoria de cachés de bloques con la finalidad de mejorar
el rendimiento en sus accesos.
Dispositivos de caracteres: Como terminales, impresoras, ratones… los
accesos se realizan de manera secuencial
Internamente los diferentes tipos de dispositivos se identifican por su tipo
básico (bloques o caracteres), por un número denominado major (tipo de
dispositivo) y un número minor (dispositivo distinto dentro del mismo tipo major).
UNIX gestiona los dispositivos mediante drivers asociados a cada tipo de
dispositivo como se muestra en la figura de la página siguiente. El usuario que
quiere dirigirse a un dispositivo real de UNIX debe hacerlo por medio del sistema de
ficheros mediante el cual se nombran ficheros especiales. Por ejemplo en UNIX la
impresora es /dev/1p0 y el disco duro /dev/hda. UNIX utiliza los file descriptor
que son números locales en el proceso que forma parte den entorno de ejecución
de un dispositivo. Encontramos 3 file descriptors: el 0 o estándar de entrada, el 1 o
estándar de salida y el 2 o estándar de error. En la página siguiente también
podemos apreciar las entrada/salida estándar de los procesos.
Un caso especial de dispositivo lo constituyen las pipes. Una pipe es un
dispositivo lógico destinado a comunicar procesos. Su funcionamiento es el de una
cola de caracteres con una longitud fija en la que los procesos pueden escribir y
Disp. bloques / caracteres
Sistemas operativos · 21
Esquema de las entradas/salidas en UNIX
Entrada/salida estándar de los procesos
leer. Cuando se intentar leer sobre una pipe vacía, se
quedará bloqueado hasta que otro proceso escriba en
ella los caracteres suficientes como para que se pueda
efectuar una lectura. Otro caso es intentar escribir sobre
una pipe llena; en este caso hasta que otro proceso no
haya leído los suficientes caracteres no se producirá la
escritura.
Existen las named pipe que es un dispositivo normal
que forma parte del sistema de ficheros y su
comportamiento es idéntico al de cualquier dispositivo. Y
luego la pipe que es un dispositivo que se crea en el
momento en que un proceso lo abre y se destruye
cuando se cierra el último proceso que lo tiene abierto.
Una vez creada, los diferentes procesos lo asocian a un
dispositivo virtual de manera implícita, por ello las pipes
no tienen asociado ningún nombre que aparezca en el
sistema de ficheros.
El tema más interesante de UNIX desde el punto
de vista de la entrada/salida es la facilidad con que se
pueden redireccionar los files descriptors estándares de
los procesos desde el shell. El símbolo < se utiliza para
redireccionar el estándar de entrada, y el símbolo > el
de salida; así por ejemplo:
$ps > nombre
guarda el estado de los procesos actuales en un fichero
nombre. Otro ejemplo más:
$ tail < nombre
muestra por la salida estándar actual las diez últimas líneas del fichero nombre.
Otra función muy interesante es el posible encadenamiento de la
ejecución de más de un programa mediante pipes. Esto se consigue
redireccionando la salida estándar de un proceso y la entrada estándar de otro a
una pipe; para indicar la conexión de dos procesos se utiliza el símbolo |. Por
ejemplo:
$ps –aux | sort +2 -3 | tail > nombra
Envía al fichero nombre la información de los nueve procesos que tuilizan durante
más tiempo la CPU.
22 · Sistemas operativos
TEMA 5 EL SISTEMA DE FICHEROS
1. EL CONCEPTO DE FICHERO
El sistema de ficheros es el encargado de gestionar el conjunto de
ficheros contenidos en un mismo dispositivo de almacenamiento. Se encarga de
proporcionar un espacio de nombres y un control de acceso a todos los
dispositivos.
Ahora bien, un fichero es un dispositivo lógico formado por una
agrupación lógica de información almacenada en un dispositivo físico, por ejemplo,
un disco, una cinta o la memoria, que se puede manipular como un todo. La
información que incluye tiene en común un conjunto de propiedades que la
caracterizan, y son:
La información relativa al contenido del fichero y a su modificación: es decir,
tamaño, fecha de creación, última modificación, tipo de información.
La ubicación de esta información dentro del dispositivo de almacenamiento,
así el sistema podrá localizar el fichero dentro del dispositivo.
La accesibilidad del fichero: es decir la protección del mismo, quien puede
realizar operaciones, escribirlo, borrarlo, quien es el usuario propietario…
Así pues podemos encontrar ficheros ejecutables, que el sistema operativo es
capaz de ejecutar (dado que tienen una estructura y un encabezado que así se lo
indican), otras veces abren un programa gráfico si el fichero es una imagen… y un
caso especial es el del fichero directorio, que es una lista de parejas de nombres
y números cuya finalidad es dar nombre a los ficheros y permitir su localización.
2. EL ESPACIO DE NOMBRES
En este apartado vamos a tratar dos aspectos relacionados con el espacio
de nombres: La estructura de los espacios de nombres y las operaciones que
podemos realizar sobre la misma.
¿Por qué necesitamos nombres? Esta bien claro que dentro del sistema
se identifica cada objeto (entendiendo por objeto cualquier fichero, directorio,
dispositivo, proceso, etc.) por un nombre interno que consiste en direcciones de
memoria; pero claro a los usuarios nos resulta más fácil recordar que el dispositivo
con el nombre impresora es la impresora, que recordar un número que suele tener
varias cifras. Una de las funciones del sistema de ficheros es facilitar una
traducción entre unos nombres a los que estamos acostumbrados los usuarios y
los nombres internos del sistema.
El sistema operativo además implementa la
Estructura de un fichero directorio
función de traducción de los nombres mediante
estructuras de datos llamadas directorios, los cuales
a su vez se implementan mediante ficheros en los que
el sistema almacena la estructura de datos,
consistente en una tabla que relaciona los nombres
que contiene el directorio con los nombres internos
del sistema operativo (ver figura lateral). Un sistema
operativo puede ofrecer una visión de un único
espacio de nombres para todos los objetos y el
sistema de ficheros (así lo hace UNIX que no
diferencia distintas unidades) o un espacio de
nombres separado e independiente para cada tipo de
objeto (Como Ms-Dos que el disquete y su contenido es A:, el disco duro C:, LPT1,
etc).
Tema 5
El sistema de ficheros
1. El concepto de fichero
2. El espacio de nombres
3. La protección
4. El sistema de ficheros y la
protección en UNIX
Sistemas operativos · 23
La estructura de los espacios de nombres puede ser de tres tipos:
espacio lineal, espacio jerárquico en árbol y espacio jerárquico en grafo.
Distintas estructuras de los espacios de nombres
La estructura en espacio lineal es la más
sencilla, ya que solo tiene una dimensión en la que todos
los nombres se encuentran en el mismo nivel (como
vemos en la tabla lateral. Esta estructura es adecuada
para espacios con pocos objetos, en sistema monousario
ya que se trata de una estructura que permite tener una
buena visión de conjunto y conseguir una localización
rápida de cualquier objeto; pero resulta inadecuado
cuando el número de objetos comienza a ser elevado, ya
que el significado que para el usuario puedan tener los
nombres que nos vemos obligados a poner a los
dispositivos para no repetir, puede llegar a quedar
desvirtuado.
Por ello y porque nos gustaría poder agrupar los
ficheros por tipos, trabajos o cualquier otra clasificación
que nos resulte útil, tenemos las estructuras jerárquicas.
Para conseguir un espacio jerárquico tratamos los
directorios como objetos con un nombre y así pueden
formar parte de los objetos que agrupan otros directorios.
La estructura jerárquica en árbol parte de un
directorio raíz del cual cuelgan otros directorios y/o
ficheros que configurarán las hojas del árbol. El nombre
absoluto es el formado por la ruta que va desde la raíz,
pasando por los diferentes subdirectorios, hasta llegar al
fichero (separado cada nivel por el carácter delimitador /).
Tenemos un directorio inicial y un directorio de trabajo.
Los nombres relativos serán entonces los que forma el
recorrido que va desde el directorio de trabajo hasta el
fichero en cuestión. Así varios ficheros pueden tener el
mismo nombre relativo siempre que se obtengan a partir
de diferentes directorios de trabajo, pues los nombres
absolutos no son iguales. Con este sistema ya podemos
clasificar los ficheros en directorios distintos, pero el
problema de esta estructura es que no permite compartir
de una manera sencilla ficheros entre diferentes usuarios
ni permite moverse por el árbol de directorios en sentido
ascendente, cambiando el directorio de trabajo.
Para ello tenemos la estructura jerárquica en
grafo dirigido el cual permite direccional al mismo
tiempo con los nombres absolutos y relativos. Así podemos acceder a un objeto
mediante más de un nombre. Por ejemplo, en UNIX y en DOS en cada directorio
figuran dos nombres especiales: “.” y “..”. El primero hace referencia al directorio
que lo contiene, así podemos referenciar el directorio en el que nos encontramos
sin conocer su nombre absoluto, y el “..” es el nombre del padre del directorio, que
nos permite ascender por la estructura. Así solucionamos todos los problemas que
nos habíamos planteado anteriormente, pero eso sí, el inconveniente que surgirá
después (ya lo veremos) es la gestión de estos grafos.
Las operaciones que podemos realizar sobre estas estructuras son
varias:
24 · Sistemas operativos
Operaciones de manipulación del sistema de ficheros:
o Crear_SF: El sistema de ficheros se incluye dentro de un sistema de
almacenamiento. Por ello debemos dotar a cada dispositivo de un
conjunto de estructuras de datos que permitan definir los ficheros, los
directorios, etc, y así poder transportarlo sin pérdida de información en
el caso que se tratase de un dispositivo extraíble.
o Montar_SF: En algunos sistemas operativo s, se tiene que informar al
mismo antes de acceder a una nuevo SF, tanto si se acaba de
introducir un nuevo volumen (CD) como si se ha creado una estructura
nueva, esto se requiere para poder seguir ofreciendo un único espacio
de nombres.
o Desmontar_SF: Al contrario de lo anterior, por ejemplo cuando
extraemos un CD.
o Verificar_SF: Podemos verificar las estructuras de datos que
configuran un SF; por norma general esto no suele formar parte del
núcleo del sistema operativo, sino que son aplicaciones y utilidades.
Operaciones de manipulación de directorios:
o Localizar_objeto: Consiste en que dado un nombre absoluto o
relativo, se localiza el objeto al que hace referencia. No es en sí una
operación única, sino que suele formar parte de multitud de llamadas y
procedimientos.
o Modificar_nombre: Se localiza el directorio, se verifica que el nombre
es único y se cambia por el nuevo.
o Crear_nombre: Se crea un nombre para un objeto en concreto. Si el
objeto ya existía, se establece un enlace nuevo entre el nombre y el
objeto al que hace referencia (enlace físico). Es lo contrario a un enlace
simbólico que es un enlace a otro fichero que contiene el nombre del
objeto (vínculo). La existencia de estos dos tipos de enlaces hace que
la operación localizar_objeto se vea obligada a saber de qué tipo de
enlace se trata y a actuar en consecuencia.
Si el objeto no existía y se crea a la vez que el nombre, debe
proporcionar además del fichero en sí, su tabla de traducción y los
enlaces “.” y “..” pertinentes.
o Destruir_nombre: Se localiza un directorio y se destruye. Si el fichero
al que hacía referencia este nombre no contiene ningún otro, el
sistema operativo lo destruirá y liberará los recursos que ocupo. Los
enlaces físicos son fácilmente detectables, pero los simbólicos no tanto,
ya que estos enlaces simbólicos pueden no estar en el mismo sistema o
no hallarse activos en ese momento; como resultado de ello puede ser
que aparezcan enlaces simbólicos que no señalen a ningún lado o, lo
que es peor aún, que apunten a un fichero que ha reutilizado un
nombre antiguo. Para evitar esto, el sistema detecta los enlaces
simbólicos que ya no apuntan a ningún fichero mediante la operación
localizar_objeto.
o Ver_nombres: Permite consultar el contenido de un directorio.
Operaciones de manipulación del directorio de trabajo:
o Cambio_de_directorio
o Directorio_actual: estas dos operaciones nos indican en qué
directorio estamos trabajando y cómo podemos cambiar el directorio de
trabajo.
3. LA PROTECCIÓN
Un sistema operativo gestiona los recursos y objetos sobre los cuales se
pueden desarrolla acciones. Pero es responsabilidad del sistema operativo:
Sistemas operativos · 25
La protección, es decir, impedir que la dinámica de unos usuarios se vea
afectada por las acciones de otros. Esta protección se consigue autorizando o
denegando los accesos que en un instante concreto soliciten los usuarios.
La seguridad del sistema, es decir, impedir que la dinámica de unos usuarios
se vea afectada por las acciones de agentes externos al sistema computador.
Se centra esta responsabilidad en cuestiones como la identificación de los
usuarios.
El concepto que vamos a estudiar en este apartado es el primero, el de
protección, y aunque protección y seguridad sean conceptos muy relacionados,
supondremos que los usuarios han sido debidamente identificados y por tanto son
en realidad quienes dicen que son.
El concepto de protección se refiere al control que lleva a cabo el sistema
operativo sobre las diferentes formas con que cuentan los usuarios para acceder a
los objetos del sistema. Hay dos casos en los que no se necesita de protección:
Cuando solo tenemos un usuario no hace falta control a los archivos, puesto que
todos pertenecen al mismo usuario y cuando el sistema es multiusuario pero todos
tienen acceso a todos los ficheros, pues no hay concepto de propiedad de fichero.
Los elementos que intervienen en la protección son:
Los objetos: son aquellos elementos que gestiona el sistema operativo sobre
los cuales se pueden efectuar diferentes acciones: ficheros, dispositivos,
directorios, procesos…
Los dominios son los diferentes agentes activos del sistema que pueden
actuar sobre un objeto. Así son dominios los procesos que pertenecen a un
mismo usuario o a un mismo grupo de usuarios.
Los derechos son acciones sobre un objeto permitidas por parte de un
dominio: leer, escribir, ejecutar, crear, destruir…
La matriz de accesos está formada por tantas filas como dominios hay y
tantas columnas como objetos, como vemos en el ejemplo inferior:
Matriz de accesos
En esta matriz anterior, el dominio Juan tiene derechos de lectura y
escritura sobre el objeto ejercicio1.txt, pero en cambio solo tiene derechos de
lectura sobre el objeto ejercicioB.txt. En la tabla observamos que los dominios
aparecen como objetos debido a que un dominio también es un objeto sobre el
26 · Sistemas operativos
cual se pueden llevar a cabo acciones. Por ejemplo, el dominio Profesores tiene
derecho de cambio sobre el dominio Estudiantes.
La matriz de accesos es una buena forma de contemplar las relaciones que
se establecen entre los diferentes elementos, pero no es un buen instrumento de
trabajo, dado que su volumen crece rápidamente a medida que aumenta el número
de usuarios y ficheros del sistema y además el número de objetos sobre los cuales
un usuario tiene derechos es pequeño en comparación con el número total de
objetos del sistema, con lo que la matriz se convertirá en una estructura muy
grande pero con la mayor parte de las celdas vacías. Para evitar este problema
existen tres tipos de protecciones: las listas de control de acceso, las listas de
capabilities y los modelos combinados:
Listas de control de acceso son listas de parejas (derechos, dominio)
asociadas a un objeto y que se obtienen como resultado de dividir la matriz de
accesos es columnas y eliminar todas las celdas vacías (se ahorra espacio y la
estructura es más dinámica). Así las listas de control de acceso se encuentran
asociadas a los objetos y no a los procesos, de manera que cada vez que un
proceso quiere llevar a cabo un acceso a un objeto hay que verificar si tiene
derecho en la LCA. En una sesión de trabajo con un fichero se verifican los
derechos en cada operación de lectura o escritura que se quiere realizar, hecho
que representará un volumen de sobrecarga importante para el sistema;
aunque a cambio de ello como todos los derechos de los dominios sobre un
objeto se encuentran en un mismo lugar, la asignación y revocación de los
mismos por parte del propietario se efectuará con total sencillez.
Listas de capabilities (capacidades): Es una lista de parejas (objeto,
derechos) asociada a un dominio, cada una de las cuales se denomina
capability. Las listas resultan de dividir la matriz en fijas y eliminar las celdas
vacías; así estas listas son estructuras de datos asociadas a procesos (que
pueden estar protegidas en un espacio determinado o cifradas para evitar
modificar su contenido). Así cuando un proceso accede a un objeto, tiene que
presentarle al sistema la capability que le da derecho a llevarlo a cabo. El
sistema verifica su validez y efectúa el acceso, es más ágil que el método
anterior; en cambio la modificación de los derechos no es trivial, ya que éstos
se encuentran repartidos por todos los procesos del sistema y para revocar un
derecho hay que recorrer todos los procesos para eliminar las capabilities
asociadas.
Modelos combinados: Para solucionar los problemas que presentan uno y
otro modelo, los sistemas utilizan una combinación de los dos que permite
disfrutar de las ventajas de los dos esquemas. Las LCA se utilizan como
mecanismo básico y se suelen presentar realizando una reducción de todos los
dominios posibles a unos cuantos. Por ejemplo en Unix hay tres grupos de
dominio: el propietario, todos los dominios asociados al grupo de trabajo del
propietario y el resto de dominios del sistema. El primer acceso a cada objeto
se verifica mediante las LCA. Tras haber verificado el derecho, el sistema
genera una capability que se utilizará durante la sesión de trabajo; esta
capability se asocia al dispositivo virtual que se genera durante la operación
abrir y se destruye con la operación cerrar. Así los accesos que se lleven a cabo
durante la sesión de trabajo no necesitará acceder a la LCA. Otro sistema es el
llamado llave y cerrojo. Cada capability tiene asociado un número denominado
llave y los objetos tienen asociada una colección de números denominados
cerrojos; para que una capability sea correcta, la llave tiene que coincidir con
alguno de los cerrojos que posee el objeto; para revocar el conjunto de
derechos el propietario de objeto solo debe eliminar uno o más cerrojos. No es
tan flexible como la LCA, pero soluciona parcialmente el problema de tener que
recorrer todos los dominios para eliminar las capabilities asociadas.
Sistemas operativos · 27
5. EL SISTEMA DE FICHEROS Y LA PROTECCIÓN EN UNIX
En Unix encontramos los ficheros ordinarios, los ficheros directorio y los
ficheros especiales o dispositivos. El sistema Unix, reconoce un solo tipo de fichero
ordinario y lo trata como una secuencia de bytes; a excepción del fichero
ejecutable, que se caracteriza evidentemente por poderse ejecutar y por tener una
marca especial en los primeros bytes del archivo. El no encontrar esta secuencia
especial de bytes asegura que no es un ejecutable, pero el encontrarla no asegura
que sea ejecutable, pues puede ser un fichero ordinario que casualmente tiene la
secuencia de bytes ejecutable.
LCA de Unix
Recordemos que el sistema de ficheros es de grafo dirigido organizado en
directorios y a pesar de que cada dispositivo contiene un sistema de ficheros con
su propia estructura de directorios, Unix da una visión del espacio totalmente
conectado porque dispone de un Sistema de ficheros permanentemente accesible
sobre el cual se irán añadiendo el resto de sistema de ficheros antes de poder
acceder a ellos (justo en el momento del montaje).
Las protecciones de Unix, se basan en un modelo mixto; un usuario se
identifica dentro del sistema mediante un nombre de usuario y contraseña; una
vez dentro, todos los procesos asociados tendrán asociados los dominios de
usuario y de grupo de usuarios al que pertenezca. En cada momento determinado
un usuario solo puede pertenecer a un grupo. Para determinar los derechos de un
usuario sobre un fichero, Unix utiliza una LCA con tres dominios: el usuario
propietario, los usuarios que pertenecen al mismo grupo que el propietario y por
último, cualquier otro usuario y para cada uno prevé tres derechos diferentes: de
lectura, de escritura y de ejecución. La visualización de las LCA se realiza mediante
tres grupos de caracteres, como se puede observar en la figura lateral. El
significado de los derechos r (lectura), w (escritura) y x (ejecución) varía si el
fichero es un directorio. En este caso, r permite visualizar los nombres contenidos
en el directorio, w permite añadir nombres nuevos al directorio y x hace posible
que el usuario utilice el directorio como un directorio de trabajo.
28 · Sistemas operativos
TEMA 6 LA GESTIÓN DE PROCESOS
1. EL PROCESO: UNA MIRADA DESDE EL INTERIOR DEL SISTEMA
Tema 6
La gestión de procesos
Un proceso es básicamente un entorno formado por todos los recursos
necesarios para ejecutar programas. Desde el punto de vista del sistema operativo,
un proceso es un objeto más que hay que gestionar y al cual hay que dar servicio.
1. El proceso: una mirada desde
el interior del sistema
2. El ciclo de vida de un proceso
3. Las excepciones y las señales
de software
4. La gestión de procesos en Unix
Para gestionar este conjunto de recursos como un todo, el sistema reúne
información de éstos en una estructura denominada bloque de control de
procesos o PCB. Los campos más importantes que configuran el PCB son:
El identificador de proceso: Es el código que identifica de manera biunívoca
cada uno de los diferentes procesos que se encuentran en ejecución.
El estado del proceso: Indica el estado del proceso en el momento actual
dentro de unas posibilidades determinadas: run, ready, wait…
El contador del programa: Señala la instrucción que estaba a punto de
ejecutarse justo en el momento en que se produce una interrupción. Cuando el
proceso pueda continuar, la hará exactamente en este punto.
Los registros internos de la CPU: Como son registros utilizados por todos los
procesos hay que guardar su valor para retornarlo cuando un proceso continúe
de manera que se encuentre en un entorno idéntico a cuando lo abandonó.
El estado de la memoria: Cantidad de memoria asignada, lugar donde se
encuentra, etc.
Contabilidad y estadísticas: Información de valor para los administradores
de sistema pero poco útil para el usuario.
El estado de los dispositivos de entrada/salida: Los dispositivos
asignados, las solicitudes pendientes, ficheros abiertos…
El dominio de protección: Dominios a los cuales pertenece el proceso y los
derechos asociados.
La planificación de la CPU: Información a la forma como el proceso accede
al procesador en concurrencia con otros procesos.
La ejecución concurrente da al usuario la
impresión de que es él solo el que accede a la maquina e
interactúa con el sistema de forma apropiada (figura a).
Pero si estudiamos con mayor zoom la ejecución
concurrente de procesos (figura b) apreciamos una
multiplexación del procesador. Para conseguir el
efecto de ejecución concurrente se lleva a cabo una
conmutación entre los procesos que se reparten el
tiempo del procesador. Estas conmutaciones se
denominan cambios de contexto. En la figura c
observamos un cambio de contexto a mayor escala de
tiempo y podemos apreciar que es necesario guardar el
estado del procesador en el proceso 1, localizar el
proceso 2 y restaurar todo el estado del procesador a
como lo dejó el estado 2 cuando lo abandonó para poder
dar el efecto de ejecución concurrente de procesos.
Ejecución concurrente de procesos
Los estados de un proceso existen porque en
un sistema monoprocesador solo puede haber un
proceso en ejecución y el resto debe esperar su “turno”
de entrada en el procesador. Cuando el sistema acaba de crear un proceso, éste se
encuentra en el estado inicial Ready. Desde este estado puede evolucionar hacia la
finalización del proceso (en la figura de la página siguiente, esquema 2) porque
otro proceso provoque la finalización del mismo; o puede ejecutarse, pasar al
estado Run porque el gestor le asigna la CPU (3).
Sistemas operativos · 29
Desde el estado Run puede evolucionar hacia 3 direcciones: El proceso
ejecuta la última línea de código y finaliza (4); el proceso debe esperar un
acontecimiento externo, por ejemplo cuando se solicita una operación de
entrada/salida, como pulsación de una tecla por parte del usuario (5) y pasa al
estado Wait; o el proceso ha superado su cuota máxima de tiempo en la
modalidad de tiempo compartido (6) y debe volver al estado ready. Hay que
apreciar que cuando un proceso sale del estado run para pasar a ready o wait, se
produce un cambio de contexto.
Diagrama de estados
Desde el estado wait, el proceso puede
evolucionar hacia el estado ready, cuando finaliza la
operación por la cual estaba esperando (7); o
puede finalizar (8) debido a un acontecimiento
externo al propio proceso.
Para saber qué hace cada uno de los
procesos y así poder controlar sus recursos, el
sistema operativo mantiene unas colas de procesos
en función de su estado. Hay una cola de procesos
preparados (ready), otra cola de procesos en espera
(wait), pero o hay cola de procesos en ejecución,
pues solo puede haber uno cada vez.
2. EL CICLO DE VIDA DE UN PROCESO
Los procesos son elementos dinámicos y como tales operan durante un
intervalo de tiempo en el que tiene lugar:
La creación del proceso
La destrucción del proceso
La herencia entre procesos
La sincronización y el estado de finalización en la destrucción de procesos.
Los cambios en el entorno de ejecución
2.1. La creación del proceso
La creación de un proceso nuevo es el resultado de la ejecución de una
llamada al sistema del tipo crear_proceso, que es invocada, como todas las
llamadas, por un proceso ya existente. Debe contener los siguientes elementos:
La memoria donde residirán el programa, el código y los datos.
El punto de entrada desde donde se ejecutará el programa que contenga la
memoria
El entorno de entrada/salida con el cual el proceso se comunica con el exterior.
Los atributos relacionados con los dominios de protección.
Elementos de la creación de un entorno de ejecución
La especificación de estos elementos puede
realizarse de manera explícita con los parámetros
de la llamada al sistema con que se crea el proceso;
o de manera implícita haciendo que tome valores
por defecto; el sistema operativo combina las dos
alternativas con unos parámetros específicos de
llamada y otros valores se dejan por defecto.
Tras haber creado el proceso, el sistema le
otorga un nombre mediante el cual se podrá
referenciar, este nombre es único para cada
proceso durante toda la vida del sistema; ya que si
dos procesos están sincronizados A y B; y se
destruye B pero se reutiliza inmediatamente su
30 · Sistemas operativos
nombre, A estará sincronizado con un proceso no previsto y lo más probable es
que no funcione correctamente o, lo que es peor, se abra un agujero de seguridad.
2.2. Destrucción de procesos
La destrucción de un proceso comporta la destrucción del entorno que lo
constituye y la liberación de los recursos que tenía asignado. Puede tener lugar por
alguna de estas situaciones:
La ejecución de una llamada destruir_proceso, específica para tal finalidad. Una
vez acabada la ejecución del proceso sin incidentes, tiene que ser destruido.
El mal funcionamiento del proceso destruido. Si el sistema detecta que le
proceso no funciona correctamente y efectúa operaciones no permitidas (como
la división por cero, raíces cuadradas de números negativos…), entonces lo
destruye.
El efecto lateral de la ejecución por parte de otro proceso, de una llamada al
sistema diferente a la de destruir_proceso que provoca una excepción sobre el
proceso que se destruye.
2.3. La herencia entre procesos
Los procesos son creados por el sistema operativo a petición de otros
procesos. Esta situación hace que podamos ver los procesos desde el punto de
vista de la descendencia, en la que los procesos mantienen relaciones de
parentesco como la de padre e hijo. Existen tres tipos de herencia:
Compartición: El proceso padre y el hijo comparten un mismo elemento y por
ello las manipulaciones de este elemento afectarán a ambos procesos.
Copia: El sistema operativo crea los elementos que configuran el entorno del
proceso hijo a semejanza de los del padre, pero a partir del momento de la
creación evolucionarán en dos entornos distintos y no se verán afectados los
cambios de uno en el otro.
Valores nuevos: A través de parámetros en la creación, el sistema operativo
crea los nuevos elementos del proceso hijo.
Ahora estudiaremos como estos tipos de herencia pueden afectar a cada uno
de los elementos del entorno del proceso:
La memoria y su contenido: Tenemos tres segmentos: el código, los datos y
la pila. El código y los datos pueden compartirse; esto es muy útil cuando
comparten segmentos del programa cuya información debe ser leída y así
evitamos la duplicidad; pero cuando se comparten datos hay que saber que
afectarán a ambos procesos, aunque suele usarse para compartir información.
La pila jamás puede compartirse, ya que refleja el estado de llamadas a
procedimientos y a variables locales de cada proceso.
Cuando se utiliza la copia, se copia todos los segmentos, incluida la pila; la
pila también se copia cuando se comparte la memoria, por lo que ya hemos
avanzado anteriormente.
También, por supuesto, se pueden dar valores nuevos.
El punto de inicio de ejecución dentro de la memoria: Solo tiene cabida
cuando se ha copiado o compartido el código. Puede copiarse, con lo que
normalmente el valor de retorno son diferentes de la llamada de creación del
sistema; o pueden darse valores nuevos, o bien por parámetros del sistema
operativo, o por el fichero ejecutable que definirá el contenido de la memoria.
El entorno de entrada/salida: Es independiente de la memoria y tiene 3
modalidades. Puede compartirse con lo que las modificaciones que uno de los
procesos realice sobre estas sesiones de trabajo afectarán al otro. Eso sí, las
sesiones de acceso a los dispositivos que abran a partir del momento de la
creación serán independientes en cada proceso. Pueden copiarse: el hijo
encuentra abierta las mismas sesiones de acceso a dispositivos que el padre,
pero las acciones no afectarán unos a otros. O por supuesto, valores nuevos.
Elementos del entorno del
proceso
La memoria y su contenido:
Compartición: solo puede
compartirse segmento y datos,
la pila se copia.
Copia: de todos los elementos
Valores nuevos
Punto inicio de la memoria:
Copia: con distinto valor de
retorno.
Valores nuevos.
Entorno de entrada/salida:
Compartición: la sesión inicial
entre ambos se ve afectada, las
nuevas son independientes.
Copia: Mismos dispositivos pero
diferentes sesiones desde el
inicio.
Valores nuevos.
Dominio de protección:
Compartición: mismo dominio
del mismo usuario, por tanto
mismos derechos.
Valores nuevos.
Sistemas operativos · 31
Dominio de protección: La lista de capabilities puede ser perfectamente
copiada, por lo que aquí nos referiremos a los atributos de dominio, que no
pueden ser copiados. Encontramos dos modalidades: Compartición: el proceso
hijo pertenece al mismo dominio (mismo usuario) que el padre por lo que tiene
los mismos derechos; o valores nuevos.
2.4. La sincronización y el estado de finalización en la destrucción de
procesos
Modalidades de ejecución
Existe una necesidad a veces imperiosa de
sincronización entre procesos padre e hijo. Cuando
hay modalidades de ejecución en primer plano, de
fondo y diferidas. Por ejemplo:
En primer plano, el intérprete de órdenes espera
a que finalice la orden antes de solicitar una nueva.
En esta situación el proceso padre tiene que esperar a
que el proceso hijo finalice y claro, para ello el
sistema operativo debe congelar la ejecución del
proceso padre hasta que el hijo sea destruido.
En ejecución de fondo el intérprete de órdenes
no espera a que finalice la orden, sino que puede
ejecutar más. En esta situación, el proceso padre solo
necesita que el sistema lo retenga mientras crea el
nuevo proceso, con el fin de retornarle el identificador
del proceso si la creación ha sido correcta o un error
si no ha sido así.
Modalidad mixta: El proceso padre crea un
proceso hijo en modalidad de fondo y a partir de un
determinado instante en su ejecución, decide esperar
a que finalice uno de sus procesos hijo.
Con todo ello, el sistema operativo puede ofrecer dos modelos de llamadas al
sistema: introducir un parámetro modo_ejecución que indique si el proceso padre
tiene que esperar la destrucción del hijo o no; y conseguir que para crear no sea
necesario esperar nunca la finalización de un proceso.
También es necesario para el proceso padre muchas veces conocer el
punto donde la aplicación ha finalizado o el motivo de esta finalización. Ya que a
veces un proceso hijo puede finalizar felizmente pero en otras ocasiones por
ejecuciones incorrectas o por efectos laterales de la ejecución de otras llamadas al
sistema puede finalizar abruptamente.
2.5. Los cambios en el entorno de ejecución
Los sistemas operativos tienen que permitir que los procesos carguen
nuevos programas en la memoria para ser ejecutados. Los pueden hacer de dos
maneras: al mismo tiempo que crea un nuevo proceso; a posteriori, una vez creado
el proceso, mediante la invocación de la llamada específica cargar.
Ésta última es la que nos interesa; lo que ocurre en este caso es que el
intérprete de órdenes obtiene la orden cargar a través de la entrada estándar,
analiza la existencia de algún ejecutable y crea un nuevo proceso igual que él; este
nuevo proceso al ejecutarse, cargaría la aplicación que da servicio a la orden
recibida. La carga del nuevo ejecutable provoca la reconfiguración total del espacio
lógico del proceso, de manera que todos los valores de variables y constantes, los
procedimientos y las funciones que se encontraban dentro del espacio lógico antes
de la carga, desaparecen; pero para que el nuevo código pueda utilizar información
anterior a su carga deben existir mecanismos o dispositivos de almacenamiento que
sirvan de puente entre ambos. A pesar de poder guardarse en el sistema de
ficheros, también el sistema operativo ofrece la posibilidad de pasar la información
32 · Sistemas operativos
a través de parámetros de llamada, los cuales son recibidos por el nuevo programa
como parámetros de entrada de la función principal.
3. LAS EXCEPCIONES Y LAS SEÑALES DE SOFTWARE
Los procesos pueden necesitar ser informados de acontecimientos que
suceden de manera imprevista en cualquier instante de la ejecución de un
programa. Por ejemplo, un proceso puede necesitar saber si se ha producido un
error en el acceso a la memoria para solicitar que se aumente el área asignada a
una determinada variable; o también puede necesitar saber si un cierto terminal
sobre el que trabaja se ha apagado, para acabar la aplicación correctamente.
Las señales de software son la herramienta que proporciona el sistema
operativo para trasladar el mecanismo de las interrupciones al ámbito del proceso.
Igual que sucede en el ámbito del hardware, los procesos tienen que reconocer
ciertos eventos y atenderlos con urgencia.
La procedencia de las señales de software nos permite clasificarlas en:
Dispositivos de entrada/salida: Como por ejemplo la desconexión de un
terminal, la pulsación de una tecla de control por parte del usuario…
Excepciones: Provocadas por el proceso de manera involuntario durante la
ejecución de una instrucción, porque es errónea, porque el elemento hardware
al que hace referencia está saturado o por violación de un segmento.
Llamadas explícitas al sistema: Son señales entre procesos del mismo dominio
de protección que pueden informar sobre eliminaciones de proceso,
sincronizaciones, etc.
El reloj del sistema: Cuando un proceso tiene que realizar acciones a intervalos
regulares de tiempo; por ejemplo un módem que espera cierto lapso de tiempo
para detectar si la línea se ha cortado o no.
Efecto lateral de una llamada al sistema: Un proceso padre, por ejemplo, puede
recibir una señal de que uno de sus procesos hijo ha sido destruido.
Ahora bien, una vez recibidas estas señales, puede tener uno de los siguientes
tratamientos:
Tratamiento definido por el mismo usuario.
Ignorar el acontecimiento.
Tratamiento definido por el sistema operativo: Si por ejemplo existe un mal
funcionamiento de un proceso y no se han especificado un tratamiento para
ese caso particular, el sistema operativo tiene que proporcionar uno, y por
norma general será la destrucción del proceso. En este caso, el sistema
operativo se encarga de enviar el estado de finalización al proceso padre para
indicarle el motivo de la destrucción.
4. LA GESTIÓN DE PROCESOS EN UNIX
En Unix, un proceso es un entorno de ejecución identificado por un
número denominado PID que es el identificador del proceso y que es único durante
toda la vida del sistema operativo. Los principales elementos que constituyen un
proceso en Unix (y que podemos observar en la imagen de la página siguiente son:
El espacio de memoria, formado por el segmento de código, datos y pila. El
segmento de código puede ser compartido por otros procesos. Y entre el de
datos y pila hay una porción libre que puede aumentar el segmento de datos
con la llamada malloc.
Sistemas operativos · 33
Proceso en Unix
El entorno de entrada/salida formado por los file descriptors locales a cada
proceso. Cada entrada de la tabla apunta a otra tabla, en este caso de carácter
global para el sistema y contienen los punteros, el modo de acceso, etc.
El UID y GID que corresponden al número de
identificador de usuario y al de grupo de usuario para
determinar el dominio de protección de los procesos.
El estado de los registros del procesador que
refleja en qué estado se encuentra la ejecución del
programa que tiene el proceso.
La información estadística que presenta
informaciones tales como el tiempo consumido de UCP,
el volumen consumido de memoria o el número de
procesos hijo generados.
A continuación
inherentes a los procesos, como son:
Creación y destrucción de procesos
Cambios de entorno
Jerarquía y señales en Unix
estudiaremos
3
características
4.1. Creación y destrucción de procesos
Ya sabemos que las operación son crear_proceso (fork), Destruir_proceso
(exit) y Esperar_finalización (wait).
Creación de un proceso en Unix
La llamada fork no tiene ningún
parámetro y crea un nuevo proceso hijo
que es un duplicado del padre. El PCB hijo
es una copia del padre, al igual que el
espacio de memoria, y las entradas de la
tabla file descriptor. Pertenecen ambos
procesos al mismo usuario y grupo de
usuarios; pero a partir de la orden fork
cada proceso continúa su ejecución de
manera independiente. El proceso hijo
recibe un valor 0 y el padre recibe el
identificador PID del hijo para poder ser
distinguidos. Además Unix no permite que
la última entrada de la tabla de procesos y
el último espacio de memoria libre sean
ocupados por un usuario normal, ya que
estos espacios se destinan para iniciar
algún proceso del sistema de manera
urgente, como puede ser el proceso de
detención del sistema shutdown.
La llamada exit destruye el proceso, y
es el sistema el que se encarga de
destruir el proceso que se ejecuta. Se
pasa un parámetro al sistema operativo
que el proceso padre podrá recoger mediante la orden wait para ser notificado
del estado de finalización.
La llamada wait bloquea el proceso que lo ha llamadao hasta que alguno de
sus procesos hijo haya sido destruido. Cuando esto ocurre, el sistema le
retorna el PID del proceso destruido y como parámetro de salida, el estado en
que ha finalizado. Unix guarda el estado de finalización de los procesos
destruidos en su PCB y espera que el proceso padre lo recoja mediante la
llamada wait. Así que el proceso no es liberado en el momento de su
destrucción, están a la espera de la recogida de su PCB, se encuentran
entonces en el llamado estado zombie, hasta que la llamada wait permita
34 · Sistemas operativos
destruirlos definitivamente. Para evitar que se acumulen demasiados procesos
en este estado, está limitado el número de procesos zombie que puede tener
cada usuario en cada momento y si un proceso es destruido más tarde que su
proceso padre, entonces pasan a ser considerados hijos del primer proceso del
sistema (el proceso INIT que es el único proceso en Unix que no se crea con la
llamada fork, tiene PID 0) que será el encargado de recoger su estado de
finalización.
4.2. Cambios de entorno
Cualquier cambio que se quiera llevar a cabo en un proceso de tiene que
realizar después de que éste haya sido creado. El cambio de ejecutable y los
cambios en las entrada/salida permiten hacer el programa controlable y flexible.
El cambio de ejecutable realizada
con la llamada exec al sistema de
Unix, permite cambiar la imagen o el
ejecutable que contiene el proceso.
Normalmente solo afecta a la
programación de señales y al
dominio de protección. Se suele
cambiar al dominio del usuario
propietario o al grupo del usuario
propietario del fichero ejecutable, lo
que permite construir aplicaciones
que accedan de manera controlada a
bases de datos, etc.
La Manipulación de los file
descriptors a través de la llamada
dup que permite duplicar el valor de
una entrada concreta de la tabla de
file descriptors en la primera posición
libre que se encuentre dentro de la
tabla. El proceso es como explicamos
a continuación:
En primer lugar, el intérprete
crea el proceso hijo que tendrá que
ejecutar la orden; cuando se ha
creado hay que redireccionar la
entrada estándar para que cuando se
haya cargado el programa orden se
encuentre
el
redireccionamiento
efectuado. Para ello se crea un file
descriptor vinculado a “fichero” con
la llamada open (desFichero) con lo
cual se ocupa la primera entrada
libre de la tabla de file descriptors.
(primera imagen lateral) Para
redireccionar la entrada estándar desde fichero hay que hacer que el file
descriptor 0 se encuentre asociado al fichero, por lo que desasignamos el
dispositivo real asociado al file descriptor 0 y mediante la llamada dup (segunda
imagen lateral), lo volvemos a signar, copiando sobre su entrada (STdin) la
entrada asociada a descFichero.
Por último, falta eliminar mediante la llamada close (tercera imagen de la
figura lateral) el file descriptor DescFichero para conseguir el entorno de
entrada/salida que debe encontrar la orden que hay que ejecutar. Después, el
proceso hijo puede cargar el nuevo ejecutable mediante la llamada exec.
Cambio de entorno en Unix
Sistemas operativos · 35
Funcionalidad de las pipes
Las pipes son un dispositivo lógico
destinado a comunicar procesos con una
relación de parentesco. Funcionan como una
cola de caracteres con una longitud fija,
donde los procesos pueden escribir y leer. Se
crean en el momento en que se abre
mediante la llamada pipe y se destruye
cuando el último proceso que lo tiene abierto
lo cierra. El dispositivo que se crea con pipe
tiene asociados dos file descriptors, uno de
entrada y otro de salida; pero no se pueden
abrir con la orden open, sino que los procesos
que lo quiera utilizar necesitan heredar los file
descriptors de su proceso padre. Funciona por
sincronización: cuando un proceso intenta
leer sobre una pipe vacia, se queda
bloqueado hasta que otro proceso escribe
sobre ella y ya hay material suficiente para
leer; cuando un proceso intenta escribir sobre
una pipe completa, se queda bloqueado hasta
que algún otro proceso lee la cantidad
suficiente de la pipe como para que el
proceso bloqueado pueda efectuar su
operación de escritura
En la figura lateral podemos ver un
ejemplo de utilización de pipes. El dibujo
superior es la situación tras haber creado la
pipe, con lo cual ésta tiene los file descriptors
de lectura y escritura en el mismo proceso. En
cambio la pipe es más útil cuando se lleva a
cabo la llamada fork al sistema, y el proceso
hijo hereda del padre los file descriptors, entre los cuales se encuentran los
creados con la llamada pipe. Tras la creación del hijo y para mantener la
comunicación, ambos cierran el canal del sentido de la comunicación que no
van a utilizar, para permitir la detección del proceso de comunicación (queda
unidireccional); como podemos observar en la parte inferior de la imagen.
4.3. Jeraquia y señales en Unix
Ya sabemos que el proceso INIT lo inicia el propio sistema operativo, no
está creado por la orden fork. Sus principales funciones son las de inicializar todos
los procesos del sistema, como los procesos servidores de red, liberación de los
procesos zombies que ya no tienen proceso padre y poner en funcionamiento el
proceso getty. Este proceso se encarga de esperar que se pongan en marcha los
terminales. Cuando esto ocurre, el proceso carga el programa login, para
indentificar al usuario, si es correcto posteriormente carga el shell e inicia una
sesión de trabajo con ese usuario. Cuando el usuario finaliza, el proceso shell se
destruye e INIT crea un nuevo proceso getty que lo sustituye.
Las señales en Unix pueden ser generados por los dispositivos de
entrada/salida, excepciones, llamadas explícitas al sistema o por el reloj del
sistema. En cualquier caso, los tratamientos posibles son los ya conocidos: el que
da el sistema operativo por defecto según el tipo de señal; una segunda posibilidad
es ignorar el acontecimiento (excepto la señal SigKill que no puede ser ignorada); y
por último el que haya definido particularmente el usuario.
36 · Sistemas operativos
TEMA 7 LA CONCURRENCIA Y LA COMUNICACIÓN
1. INTRODUCCIÓN
En sistemas concurrentes, los procesos cooperan en el cálculo y la
realización de diferentes tareas y comparten recursos (como los dispositivos,
código, variables…); así los procesos deben contar con la posibilidad de
intercambiar información entre sí, a través de dos procesos principalmente:
Sincronización: Permite el acceso concurrente de los procesos a objetos del
sistema que son básicamente secuenciales. Todos los procesos que deseen
compartir algún objeto deben ponerse de acuerdo para saber qué acceso se va
a llevar a cabo y éste sea coherente y libre de errores. Veremos en los puntos
siguientes diversas soluciones de software y los semáforos.
Comunicación: Muchas veces es necesario intercambiar resultados parciales
entre procesos concurrentes o información en general. Hay varias formas a su
vez de hacerlo:
o Paso de mensajes: Integra tareas de comunicación y a la vez de
sincronización.
o Memoria compartida.
o Señales: Interrupciones de software que pueden recibir los
procesos para indicar que ha tenido lugar un determinado suceso.
o Mecanismos de comunicación remota.
2. LA SINCRONIZACIÓN DE PROCESOS
Antes de nada deberíamos preguntarnos porqué es necesaria la
sincronización de procesos. Y esto lo vamos a ver con un ejemplo; para ello
utilizaremos el dispositivo cola de impresión. Este dispositivo lo gestionan los
usuarios (cuando quieren imprimir un trabajo, las tares pendientes en la cola de
impresión aumentan en 1) y el gestor de impresora (que decrementa en 1 las
tareas cuando ha finalizado la impresión de un documento).
Bien, en principio, tareas pendientes es una variable compartida por todos
los usuarios y por el gestor de impresora. Pero cuando el acceso es concurrente, la
simple orden de un usuario al mandar imprimir un trabajo sería:
Tarea_pendiente = tarea_pendiente + 1
Aunque parezca así de sencillo, en código máquina quedaría:
LOAD R0, tarea_pendiente;
INC R0
STORE tarea-pendiente, R0
Sucede que la utilización de registros, puede hacer que si una tarea es
interrumpida en el proceso INC o STORE y estos no se completan (interrumpida por
un cambio de contexto porque ha expirado su quantum, por interrupción de
dispositivo, etc.); otro procesos concurrentes pueden hacer cambiar el valor de
tarea_pendiente, siendo el resultado erróneo. Por ejemplo, si un usuario es
interrumpido cuando ha enviado un trabajo a imprimir, ocurrirá que luego la
impresora intentará imprimir un trabajo inexistente; mientras que si el gestor de
impresoras es interrumpido en la actualización de la variable, el resultado final es
que una tarea se quedará sin imprimir.
Estos problemas han dado lugar a la llamada sección crítica, que es una
secuencia bien delimitada (con inicio y fin) de instrucciones que modifican una o
más variables compartidas. Esta sección crítica debe mimarse especialmente, dado
que las principales causas de estos problemas de sincronización tienen lugar por:
La aparición de copias temporales
La posibilidad de que un proceso acceda al contenido de una variable
compartida en cualquier instante, antes de asegurarse de que todas las
peticiones de modificación previas han finalizado.
Tema 7
La concurrencia y la
comunicación
1. Introducción
2. La sincronización de procesos
3. Las soluciones de software
para la exclusión mutua
4. Los semáforos
5. El soporte de hardware para la
exclusión mutua
6. Procesos productores y
consumidores
7. La comunicación entre
procesos: el paso de mensajes
8. Problemas de coordinación
entre procesos (deadlock)
Sistemas operativos · 37
Por ello, cuando un proceso entra en una sección crítica, tiene que completar
todas las instrucciones del interior de la sección antes de que cualquier otro
proceso pueda acceder a ésta; es por tanto un acceso a la sección crítica en
exclusión mutua y tiene que cumplir los siguientes requisitos:
Asegurar la exclusión mutua entre los procesos a la hora de acceder al recurso
compartido.
No hacer ningún tipo de suposición de la velocidad de los procesos ni del orden
en que éstos se ejecutarán.
Garantizar que si un proceso finaliza por cualquier razón dentro de la zona de
sección crítica, no afectará al resto de procesos que quieran acceder a la
misma.
Permitir que todos los procesos que están esperando acceder a la sección
crítica, puedan hacerlo en un tiempo finito (starvation).
Garantizar que solo uno de los procesos, como mucho, de los que quieran
acceder a la sección crítica, acabará entrando (deadlock). Así, si la sección
crítica está ocupada ya por un proceso, el resto de procesos se bloqueará
(durmiéndose o poniéndose en alguna cola de espera) o entrarán en espera
activa (consultado constantemente el estado del recurso). Por el contrario, si la
sección está libre, el proceso que pide paso entrará, pero cerrará el acceso a
cualquier otro proceso, hasta que haya utilizado el recurso compartido y libere
la exclusión mutua.
3. LAS SOLUCIONES DE SOFTWARE PARA LA EXCLUSIÓN MUTUA
Para que se cumplan los requisitos anteriores se han diseñado (entre otros
remedios) soluciones de software. Estudiamos a continuación tres algoritmos.
Algoritmos
Primer Algoritmo
Código que ejecuta P0
While (cierto) {/*Bucle infinito*/
While (turno ==P1) {intentarlo de nuevo}
Seccion critica
Turno = P1
/*Otras operaciones de P0*/
} /*Fin while {cierto}*/
Código que ejecuta P1
While (cierto) {/*Bucle infinito*/
While (turno ==P0) {intentarlo de nuevo}
Seccion critica
Turno = P0
/*Otras operaciones de P1*/
} /*Fin while {cierto}*/
__________
Segundo algoritmo
While (cierto) {/*Bucle infinito*/
While (P1dentro==cierto) {reintentar}
P0dentro=cierto
Seccion critica
P0dentro=falso
/*Otras operaciones de P0*/
} /*Fin while {cierto}*/
__________
Tercer algoritmo
While (cierto) {/*Bucle infinito*/
P0dentro = cierto
Turno = P1
While (Pdentro==cierto y turno==P1) {reintentar}
Seccion critica
P0dentro=falso
/*Otras operaciones de P0*/
} /*Fin while {cierto}*/
En un primer algoritmo, sincronizamos los dos
procesos P0 y P1, definiéndose una variable global
denominada turno. Si turno es igual a P0, el proceso P0
puede acceder a la sección crítica; si es igual a P1, será este
proceso el que accederá; pero presenta varios problemas:
Hay que conocer los procesos.
Es difícil generalizar el protocolo de sincronización para
un número variable de procesos, ya que añadir o quitar
procesos implica modificar el código de otros procesos que
ya existían.
Este protocolo obliga a una alternancia estricta en el
orden de acceso a la sección crítica: P0, P1, P0, P1… si por
ejemplo el proceso 1 es más rápido porque tiene una mayor
velocidad, el acceso ya no es equitativo.
Si uno de los dos procesos aborta o muere el otro
proceso no podrá acceder al a sección crítica y se quedará
de manera indefinida en un bucle while esperando su turno.
Un segundo algoritmo pretende resolver estos
problemas, con el identificador Pxdentro evitamos la
alternancia estracita en el acceso a la zona crítica y además
sin un proceso muere, el otro puede acceder a la sección
crítica sin ningún tipo de restricción. Pero aun así tenemos
todavía algunos problemas sin resolver:
Es difícil también generalizar para un número variable de
procesos.
Podría ocurrir que ambos procesos pudieran estar dentro de la sección crítica al
mismo tiempo. Si no ha llegado a ejecutarse la tercera línea del algoritmo que
38 · Sistemas operativos
todavía indica que la sección crítica está libre y es consultada la variable por el
segundo proceso, podrá acceder junto al primer –que ya tenía permiso- a la
zona crítica.
En un tercer algoritmo identificamos las variables Pxdentro a falso y no
inicializamos la variable turno; así si ambos procesos quieren entrar en la zona
crítica al mismo tiempo, accederá el que indique la variable turno.
Todos estos algoritmos que hemos visto solo tienen en cuenta dos procesos,
debemos ser conscientes que existen para mayor número de los mismos, pero no
se describirán por la complicación que ello supone y porque existe un método
mucho más elegante y sencillo para resolver el problema: los semáforos, solución
que estudiaremos a continuación.
4. LOS SEMÁFOROS
Los algoritmos de software anteriores son complejos y a menudo difíciles
de generalizar para más de dos procesos. Una solución posible a este problema
puede ser el uso de semáforos. Un semáforo es una variable entera s que solo se
puede incrementar mediante la operación signal y decrementar con la operación
wait. El proceso wait (s) decremente la variable s y hace pasar el proceso a la
sección crítica cuando S es mayor que o, el proceso signal incrementa el valor de la
vairable s=s+1. Evidentemente, para que esto funcione las señales wait y signal
deben tener un funcionamiento atómico.
Podemos encontrarnos con semáforos binarios que solo puede tomar los
valores o y 1 y, que por tanto, únicamente permiten tener un proceso dentro de la
sección crítica; o podemos encontrarnos semáforos n-arios que permiten tomar
valores entre 0 y n y por tanto dejan incluir hasta n procesos dentro de la sección
crítica.
Igualmente podemos tener semáforos de baja granularidad que
comporta tener diferentes semáforos para distintas zonas críticas, lo que aumenta
el grado de concurrencia entre procesos y suele interesarnos; o de alta
granularidad con lo que se utiliza un mismo semáforo para distintas zonas
críticas.
La utilización de los semáforos sigue el siguiente proceso:
Se inicializa el semáforo (S>=1). Este valor inicial debe ser mayor o
igual que 1 para indicar que no hay ningún proceso dentro de la sección
crítica y así permitir paso al primer proceso que lo pida.
Se ejecuta la operación wait: un proceso quiere acceder al a zona de
exclusión mutua; entonces se cambia el valor de s a s-1 y no se permite
el paso de ningún proceso más.
Se ejecuta la operación signal y se incrementa el valor de la variable con
lo cual queda liberada la zona de exclusión y puede entrar otro proceso
distinto.
Algoritmos de los semáforos
/*Definición de la variable e
inicialización*/
Variable semáforo: exclusión;
…
exclusión =1; /*Inicialización*/
/*Codigo procesos usuario*/
while(cierto){
/*Generar fichero*/
wait (exclusión);
tarea_pendiente=tarea_pendiente + 1;
signal (exclusión);
} /* fin del while
En la tabla lateral se expone el ejemplo de los algoritmos de
inicialización, código de procesos usuario y código de proceso gestor de la /*Código proceso gestor impresora*/
while(cierto){
impresora para la compartición del recurso impresora.
while (tarea_pendiente==0);
En la página siguiente se observa la evolución de 3 tareas de /*Enviar trabajo a la impresora*/
impresión P1, P2 y P3 y el proceso gestor de la impresora G1, y como wait(exclusión);
tarea_opendiente=tarea_pendiente – 1;
consiguen acceder a la sección crítica. Vemos en el tiempo T1 que todos los signal(exclusión);
procesos están esperando pero no existen tareas de impresión pendientes. } /*Fin while (cierto)*/
En un tiempo T2 el proceso P1 consigue entrar en la zona de exclusión
mutua, aumenta el número de tareas pendientes y luego libera el semáforo
mediante signal. Ahora bien, cualquiera de los procesos que están esperando
Sistemas operativos · 39
puede entrar en la zona de exclusión, dado que no hay un criterio para la entrada y
observamos que es el proceso P3 el que consigue entrar, aumentando las tareas
pendientes del gestor de impresión a 2.
Ejemplo de acceso a exclusión mutua
Como observamos los semáforos son un mecanismo fácil y muy útil para
sincronizar procesos concurrentes, pero podemos observar que existen dos
problemas que pueden llegar a ser muy graves:
Un proceso utiliza ciclos del procesador en un trabajo que no es útil: la consulta
constante de una variable. Estos ciclos se podrían dedicar a otros procesos.
Un proceso puede quedar esperando indefinidamente su entrada en la sección
crítica, ya que la implementación anterior no permite ningún tipo de control
sobre los procesos que están esperando. Así en el ejemplo anterior si
constantemente llegan procesos para ser impresos y el proceso gestor G1 tiene
la mala suerte de no entrar en la zona de exclusión mutua, podría llegarse a no
imprimir ningún trabajo y colapsarse la memoria del sistema a causa de la
cantidad de tareas pendientes por imprimir.
Estos problemas pueden solucionarse mediante la implementación de los
semáforos con cola de espera: El nuevo código de las operaciones wait y signal
quedan de la siguiente manera:
/* Código de la operación wait*/
If (S<=0) then /* Ponemos el proceso en la cola*/
Else S = S – 1
/* Código de la operación signal*/
If (Cola no vacia) then /* Sacamos un proceso de la cola*/
Else S = S + 1
A cada semáforo se le asigna una cola en la que los procesos pueden colocarse.
Así cuando un proceso solicita paso a una sección crítica ocupada, en lugar de
quedarse activamente consultando el valor de la variable, suspende su ejecución y
se pone en la cola del semáforo. Cuando un proceso libera la sección crítica, se da
paso al siguiente proceso en la cola según política de asignaciones varias: por
prioridades, por tiempo de espera, FIFO (First in, first out), etc.
40 · Sistemas operativos
5. EL SOPORTE HARDWARE PARA LA EXCLUSIÓN MUTUA
Para implementar los semáforos que hemos visto es la sección anterior, es
necesario asegurar que estas señales son atómicas, es decir que se ejecutan
indivisiblemente; esto tiene lugar gracias a las tres soluciones de hardware que
proponemos a continuación:
La inhibición de interrupciones ofrece la posibilidad de deshabilitar las
mismas. De esta manera si un proceso las desactivas, éste proceso siempre tendrá
asignado el procesador hasta que no las vuelva a activar; así con el siguiente
algoritmo quedaría solucionado el problema:
Inhibir {desactivar las interrupciones}
Sección crítica
Desinhibir {activar de nuevo las interrupciones}
Estas interrupciones son peligrosas y no podemos hacer un uso indebido o
malintencionado de ellas, por lo que lo más habitual es que sean utilizadas no por
los programadores, sino por el sistema operativo.
La operación test and set es una segunda posibilidad hardware para la
exclusión mutua. La idea básica es definir una variable de control asociada a la
sección crítica que determine si es posible el acceso a la misma o no. Cada proceso
que quiere acceder al recurso ejecuta la operación test and set (TS) y le pasa por
parámetro la variable de control asociada al recurso. Así un semáforo es espera
activa como vemos en el algoritmo lateral hace que TS observe el estado de S, si
está libre lo pone a ocupado e inmediatamente modifica los flags para indicar que S
estaba libre. La instrucción BNF (Branco if not free) salta a la etiqueta wait si S
estaba ocupado, pero dado que está libre el proceso retorna de la llamada wait y
accede al recurso compartido.
Para liberar el recurso compartido, damos la señal de libre, tal como se ve
en el algoritmo lateral.
El intercambio o swap es una instrucción de lenguaje máquina que
intercambia atómicamente el valor de dos palabras de memoria, como podemos
observar en el primer algoritmo de la tabla lateral. Lo que hacemos es definir una
variable global que denominamos lock, la cual puede tomar valores cierto o falso; la
variable se inicializa a falso. Cada proceso tiene además una variable local que
recibe el nombre de clave y que también puede tomar los valores cierto o falso;
todo proceso que quiera acceder a una zona crítica deberá ejecutar el código
inferior de la tabla lateral, que es de por si, bastante explicativo.
6. LA COMUNICACIÓN ENTRE PROCESOS: EL PASO DE MENSAJES
El hecho de que varios procesos llevan a cabo actividades conjuntamente,
puede plantearnos la necesidad de sincronizar y comunicar datos entre ellos, ya
sean resultados finales, datos parciales, etc. Esto podemos realizarlo a través del
paso de mensajes, un mecanismo sencillo e intuitivo que permite la sincronización y
la comunicación entre procesos.
El mensaje es un conjunto de información que, aunque puede ser de
formato flexible, suele tener dos partes: el encabezamiento que contiene la
información necesaria para que pueda llegar a su destino correctamente, y el
cuerpo que es el mensaje propiamente dicho.
Los mensajes son soportados por dos tipos de operaciones básicas:
enviar_mensaje (send) y recibir_mensaje (receive). El mecanismo de paso de los
mensajes puede ser: directo/indirecto, síncrono/asíncrono. Pasamos a verlos:
Algoritmos test and set
/*Semáforo espera activa
wait: TS s
BNF wait
Return
/* Señal de libre */
signal: mov S, libre
Algoritmos swap
/*Algoritmo swap */
swap (A, B) {
temp = A;
A = B ;
B = temp ;
} /* Fin swap*/
/* Codigo de procesos */
while (cierto){
clave = cierto ;
Do
Swap (lock, clave);
Until (clave = falso)
Seccion critica
Lock = falso
} /* fin while (cierto) */
Sistemas operativos · 41
Paso de mensajes
/* Mensajes directos */
Proceso A
…send (B, mensaje)
Proceso B
…receive (A, mensaje)
/* Mensajes indirectos */
Proceso A
…send (Buzon1, mensaje)
Proceso B
…receive (buzon1, mensaje)
Semáforo binario con
mensajes
While (cierto){
Receive (buzon, mensaje);
Seccion crítica;
Send (buzon, mensaje);
{/* Fin while (cierto)*/
Los mensajes directos, son aquellos en los que el proceso emisor tiene que
identificar al proceso receptor y a la inversa. También se denomina
comunicación simétrica ya que cada emisor tiene que conocer todos los
posibles receptores y a la inversa.
Los mensajes indirectos no se envían a un receptor en concreto, sino a un
buzón, y es el proceso receptor el que lo busca no es un emisor en concreto
sino en un buzón; así que se definen estos buzones como estructuras
intermedias para el paso de mensajes. Ello permite la comunicación de uno a
uno, uno a muchos, y de muchos a muchos. El sistema UNIX ofrece un tipo de
comunicación indirecta, mediante unos buzones llamados pipes, y que hace
posible la comunicación entre procesos con parentesco.
La comunicación síncrona se basa en un intercambio síncrono de mensajes.
Esto implica que el emisor y el receptor acaben la transferencia de la
información en el mismo momento. Por tanto, la operación send es
bloqueadora y hasta que el receptor no efectúa la operación complementaria
receive, el emisor queda bloqueado. Esta forma de comunicación permite
establecer un punto de sincronismo entre procesos, aunque en algunos
servidores puede suponernos un problema.
La comunicación asíncrona no bloque el proceso y el sistema guarda el
mensaje temporalmente en la memoria hasta que se lleva a cabo la operación
receive complementaria. Esto hace aumentar el grado de concurrencia del
sistema, pero también hay que gestionar los vectores de memoria intermedia
que almacenan los mensajes.
Un método muy sencillo para implementar la ejecución concurrente en
exclusión mutua es mediante el paso de mensajes indirectos. Para solicitar
acceso a la sección crítica, el proceso lee del buzón con la operación receive. Si el
buzón está vacío, el proceso queda bloqueado hasta que alguien escriba un
mensaje; si está lleno, el proceso lee el mensaje. Eso sí nos interesa que le primer
proceso que pida acceso pueda pasar, para ello es necesario que el buzón se
inicialice introduciendo un mensaje en su interior; de esta forma, el buzón
desarrolla el papel equivalente al de un semáforo binario. También podríamos
implementar semáforos n-arios con buzones en los que se permitiese hasta n
mensajes.
7. LOS PROBLEMAS DE COORDINACIÓN ENTRE PROCESOS (DEADLOCK)
Un bloqueo es una situación en la que un grupo de procesos permanece
bloqueado de manera indefinida sin ninguna posibilidad de que continúe su
ejecución. Suele suceder porque unos procesos han adquirido un conjunto de
recursos necesarios que otros procesos necesitan para continuar.
Por ejemplo, si un proceso P1 pidiese acceso a dos dispositivos en
exclusión mutua como son disco e impresora por este orden, y otro proceso P2
hiciera lo propio pero en orden contrario; nos podríamos encontrar en un bloqueo si
a P1 se le hubiese concedido el disco y antes de concedérsele la impresora, ésta ya
se hubiera concedido a P2; a su vez P2 no puede continuar porque necesita acceso
a disco que tiene P1. Como ninguno de los procesos libera sus recursos, la situación
se puede prolongar indefinidamente, es decir, tenemos un bloqueo. Para que esto
suceda deben cumplirse cuatro requisitos:
Exclusión mutua: Hay que acceder a los recursos en exclusión mutua.
Retención y espera: Cada proceso que tiene ya asignados recursos no los
libera, sino que espera a tener los que necesita.
No expropiación: Los recursos que un proceso ya tiene solo se liberan a
petición explícita del proceso, el sistema no se los puede quitar.
Espera circular: Los procesos bloqueados forman una cadena circular como
en el ejemplo anterior.
42 · Sistemas operativos
Podemos encontrar varias soluciones a este tipo de problemas, clasificadas en
función de su objetivo en:
Prevenir el bloqueo: Se ordena de manera lineal los recursos del sistema, así
se obliga a los procesos a solicitar los recursos en un orden creciente.
Evitar el bloqueo: Solo se asignan los recursos disponibles que no pueden
generar ningún tipo de bloqueo; esto requiere un control detallado de los
recursos asignados y a qué procesos y qué recursos esperan qué procesos.
Detectar y recuperar el bloqueo: Se basa en comprobar si se han producido
bloqueos mediante la observación de algún ciclo en el grafo de recursos
asignados. Si se detectase alguno, el sistema reinicia algunos de los procesos
bloqueados para liberar este ciclo.
Sistemas operativos · 43
TEMA 8 EL ESTADO ACTUAL DE LOS SISTEMAS OPERATIVOS
Tema 8
El estado actual de los sistemas
operativos
1. Conceptos generales
2. Los sistemas operativos de
tiempo real
3. Los sisemas operativos
multiprocesador
4. Los sistemas operativos
en red y los sistemas operativos
distribuidos.
Modelos cliente/servidor
1. CONCEPTOS GENERALES
La evolución de los sistemas operativos se ha visto muy influenciada por
dos conceptos que procedemos a estudiar a continuación: el modelo
cliente/servidor y los sistemas multiflujo.
En el modelo cliente/servidor, las llamadas al sistema, la invocación de
procedimientos y la solicitud de ejecución de órdenes son consideradas como la
petición de un servicio (por ejemplo una llamada al sistema), de un cliente (ente
que realiza la petición) hacia un servidor (ente que ofrece el servicio). La figura
lateral muestra las 3 posibles situaciones que pueden darse entre el cliente y el
servidor:
El cliente es un proceso y el servidor es su sistema
operativo, como hemos estado viendo hasta ahora.
El cliente y el servidor son servicios del sistema
operativo; se utilizan las llamadas al sistema para poner el
contacto al cliente y al servidor.
El cliente y el servidor son procesos de sistemas
operativos diferentes, y se utiliza en red para comunicar
máquinas distintas.
Este último caso es el más interesante, pues permite
ofrecer servicios desde cualquier punto de la red, y es la
idea base de los sistemas abiertos. Los mecanismos de
comunicación que podemos hallar en estos casos son 3:
Paso de mensajes: Es el caso más elemental;
cliente y servidor tienen que ser conscientes de la
ubicación de cada uno y tienen que presentar toda la información de manera
explícita, así como los parámetros la respuesta de su solicitud.
Procedimientos remotos: El cliente considera el servicio como un
procedimiento más de la librería y el sistema operativo se encarga de esconder
al usuario las particularidades de esta comunicación.
Objetos distribuidos: Se adopta la semántica de la programación orientada a
objetos. El usuario ve el servicio como la llamada de un método del objeto al
que quiere acceder.
Pero también es cierto que la relación cliente/servidor también aporta una serie
de incertidumbres que necesitan respuesta, por ejemplo: localizar un servidor o un
servicio concreto dentro de los servidores, como recuperar errores cuando algo
falla, etc, problemas que no se daban en un entorno de trabajo aislado como
teníamos antes. Hay dos posibilidades para dar solución a estos y otros problemas:
o bien tenemos más de un servidor repartido en máquinas diferentes para
implementar políticas tolerantes a fallos (y de paso ser más eficientes); o bien nos
centramos en la estructura del propio servidor, tolerando o no más de un cliente a
la vez, dando comunicaciones síncronas o asíncronas, etc.
El segundo concepto a estudiar son los sistemas multiflujo, que
consideran un proceso como una máquina virtual completa, con memoria,
dispositivos de entrada/salida, etc. Ahora al tener más de un procesador, se plantea
la necesidad también de tener más de un flujo de ejecución por proceso (antes solo
teníamos un flujo por proceso porque análogamente solo contábamos con un
procesador). Además podemos ejecutar aplicaciones paralelas que se comunican y
sincronizan a través de la memoria compartida.
44 · Sistemas operativos
2. LOS SISTEMAS OPERATIVOS EN TIEMPO REAL
Los sistemas operativos en tiempo real tienen que ofrecer servicio con unas
restricciones temporales muy concretas, en general deben garantizar el inicio de la
ejecución antes de un cierto intervalo de tiempo y debe finalizar antes que la acción
que hemos iniciado deje de tener sentido. Por ejemplo, para evitar el
desbordamiento de una presa frente a una riada, debemos iniciar la apertura de las
compuertas, teniendo además en cuenta el tiempo que tardan en abrirse, para que
la presa no reviente bajo la presión del agua. Si no podemos abrir las compuertas
asegurando esto, debemos dedicar los recursos a otras cosas como avisar a la
población y a los sistemas de emergencias. Por ello, la gestión del sistema debe:
Evitar los mecanismos de gestión que no pueden ofrecer servicio en un
intervalo de tiempo conocido o que lo hacen con un coste de tiempo excesivo.
Proporcionar herramientas que permitan ordenar los procesos en función de su
urgencia.
Facilitar mecanismos de comunicación rápidos y flexibles.
En la figura lateral se observa un ejemplo de aplicación de
tiempo real, con unos procesos ordenados por prioridades. Por
todo lo anterior, los principales puntos de acción son:
Aplicación de tiempo real
Gestión de procesos: La planificación del procesador es
externa a él y se basa en la determinación de prioridades
para los diferentes procesos; y el procesador admite los
procesos en función de esta prioridad.
Gestión de memoria: No es deseable la memoria virtual
ya que introduce un grado de variabilidad temporal nada
bueno. Así que en los sistemas de tiempo real algunos
procesos deben estar de forma permanente residentes en
memoria.
Gestión de la entrada/salida: El sistema proporciona
herramientas para que los usuarios puedan definir los
tratamientos de las interrupciones de determinados
dispositivos de entrada/salida y evitar la ejecución del
código genérico del sistema operativo.
Comunicación entre procesos: Los mecanismos de
señales también deben tener asociada una prioridad para
su ejecución. Para mejorar además la comunicación entre procesos se definen
regiones de memoria compartidas para que los procesos puedan comunicarse
sin costes de tiempo añadidos.
Gestión del sistema de ficheros: Se suele utilizar la memoria compartida y
por ello también se podría usar esta misma memoria como dispositivo de
almacenamiento.
3. LOS SISTEMAS OPERATIVOS MULTIPROCESADOR
Como cada vez se desarrollan más aplicaciones software que deben
soportar mayor volumen de trabajo y de cálculo, se hace necesario mejorar el
hardware que utilizamos con él, hay varias soluciones: el simple avance tecnológico
que hace evolucionar todo el hardware, soluciones arquitectónicos que permiten las
ejecuciones concurrentes en paralelo, mejorar el diseño del procesador, o combinar
varios procesadores en un mismo sistema; esto último suele ser económico y más
viable que el resto.
Podemos encontrar dos sistemas multiprocesador principalmente (en la
tabla de la página siguiente mostramos una imagen aclaratoria):
Sistemas operativos · 45
Multiprocesadores acoplados fuertemente, o conocidos
como sistemas de memoria compartida, en los que
cada procesador ve y puede acceder de forma directa a la
totalidad de la memoria del sistema.
Multiprocesadores acoplados débilmente: también
denominados sistemas de memoria distribuida, en los
que cada procesador solo puede acceder a una memoria
privada y se comunican entre sí por el paso de mensajes.
Modelos cliente/servidor
Las ventajas del sistema multiprocesador son varias:
Tolerancia a fallos: Se pueden diseñar de forma que
funcionen aunque alguno de los procesadores que lo
integran falle; e incluso puede reemplazarse el
componente fallido sin tener que parar el sistema.
Rendimiento y potencia de cálculo: Al disponer de
varios procesadores las aplicaciones se ejecutan en
paralelo, e incluso una misma aplicación se divide en
partes más pequeñas que se ejecutan en procesadores
distintos.
Crecimiento modular: Un mismo sistema puede
trabajar con mayor o menor cantidad de procesadores, así puede crecer según
la cantidad de trabajo que se requiera realizar, sin tener que renovar todo el
sistema.
Especialización funcional: Los procesadores que integran un mismo sistema
pueden ser muy heterogéneos en sí mismos.
Flexibilidad: Todo lo anterior hacen que estos sistemas sean muy flexibles y
adaptables.
En general con estos sistemas queremos o bien aumentar la productividad (el
usuario tendría una visión idéntica a la de un sistema monoprocesador, pero
obviamente más rápido) o bien a aumentar la velocidad (el usuario trabaja en
manera diferida). Así clasificamos los sistemas operativos multiprocesador en:
Supervisores separados: Cada procesador tiene un sistema operativo
independiente que funciona casi como un sistema aislado; casi, porque cada
sistema operativo dispone de algunos servicios como el de comunicación entre
procesos de diferentes procesadores. Además suelen existir herramientas para
repartir la carga de trabajo de manera homogénea entre procesadores. Su
objetivo básico es el de aumentar la velocidad de ciertas aplicaciones.
Maestro/esclavo: Un procesador es el maestro que se encarga de ejecutar el
sistema operativo, mientras que el resto (los esclavos), ejecutan los procesos
que el maestro les encarga. Aunque los esclavos pueden ejecutar llamadas
elementales al sistema, habitualmente el maestro es el que se encarga de
realizar los servicios directamente. Este modelo permite asignar de mejor forma
los procesos a los distintos procesadores, aunque hay que reconocer que no es
válido para sistemas con muchos procesadores, pues el acceso al maestro
puede convertirse en un cuello de botella para todo el sistema; por ello suele
gestionar multiprocesadores de memoria compartida con un número pequeño
de procesadores.
Simétrico: Todos los procesadores tienen las mismas competencias y los
recursos del sistema se encuentran a disposición de todos los procesos. Como
el sistema se ejecuta en paralelo, requiere herramientas de sincronización y
exclusión mutua para gestionar sus recursos sin conflictos. Este modelo está
especialmente indicado para sistemas de memoria compartida, en los que el
objetivo es la productividad.
46 · Sistemas operativos
4. LOS SISTEMAS OPERATIVOS EN RED Y LOS SISTEMAS OPERATIVOS
DISTRIBUIDOS
El entorno distribuido se define como varios sistemas interconectados
con una red con la capacidad de cooperarse y comunicarse, además se caracterizan
por no tener memoria compartida, el estado del sistema está repartido entre los
diferentes componentes y tienen retrasos y son frágiles por los propios
condicionamientos de la red de interconexión. Eso sí, aportan innumerables
ventajas:
Compartición de recursos caros, como pueden ser periféricos muy
especializados.
Comunicación y compartición de información: que a su vez hace posible la
cooperación de personas en un mismo trabajo y la ejecución de aplicaciones en
paralelo.
Fiabilidad, disponibilidad y tolerancia a fallos: Se pueden duplicar cálculos en
más de un equipo, duplicación de discos duros y sistemas enteros por si uno de
ellos falla, etc.
Crecimiento progresivo: La flexibilidad de la red hace poder conectar de
manera gradual distintos elementos que actualicen y se adapten a las
circunstancias puntuales.
Rendimiento: puede ser elevado el rendimiento global.
Los sistemas operativos distribuidos son sistemas operativos que engloban
y gestionan un entorno distribuido de manera transparente para el usuario. Es decir
tenemos toda la potencia del conjunto de elementos que integra la red pero con
una máquina que esconde las particularidades de su gestión. A continuación
exponemos la gradación en el nivel de transparencia e integración en varios
apartados del sistema operativo:
Ejecución de procesos: En un sistema cerrado no nos preocupa donde se
ejecutará un proceso ni cual será su entorno. Pero esto no es tan obvio en un
sistema en red y las situaciones que nos podemos encontrar (de menos a más
complejas e integradas) son las siguientes:
o Para ejecutar una aplicación en una máquina remota desde la
máquina local hacemos un telnet que nos abre la sesión en la
máquina remota, y comporta un cambio completo de entorno.
o Podemos ejecutar desde la máquina local una aplicación concreta
en una máquina remota. Pero ambos entornos, el de la aplicación y
el del usuario son diferentes y disyuntos.
o El propio sistema local tiene una llamada al sistema crear_proceso
con un parámetro para especificar la máquina donde se puede
ejecutar. La principal diferencia con el sistema anterior es que la
distribución la realiza directamente el sistema operativo, mientras
que antes se hacía mediante una aplicación externa al sistema
operativo.
o El sistema local tiene una llamada crear_proceso que localiza
automáticamente la máquina del sistema más adecuada para
realizar la ejecución y el proceso. El entorno de ejecución es el
mismo que si fuese una aplicación local.
El sistema de ficheros:
o Si se quiere compartir un fichero remoto del sistema, el usuario
tiene que copiarlo dentro de su sistema local de ficheros y para ello
requiere una aplicación específica como por ejemplo ftp. Por ello,
los sistemas de ficheros local y remoto son totalmente disyuntos.
o El sistema operativo tiene un espacio de nombres que incluye el
número de la máquina remota. El usuario ya no tiene que ejecutar
una aplicación externa para llevar a cabo la transferencia de
ficheros, sino que lo hace el propio sistema operativo.
o El sistema ofrece al usuario un único espacio de nombres que
integra los sistemas de ficheros de las máquinas remotas y no tiene
que transferir los ficheros a su propia máquina local. El usuario
Sistemas operativos · 47
desconoce donde se ubican los ficheros y como están repartidos
entre todas las máquinas del sistema.
o El usuario finalmente puede tener la misma visión que en un
sistema aislado. El sistema se encarga de distribuir los ficheros
entre los discos de la red, replicarlos o moverlos si conviene por
seguridad o eficiencia en el acceso.
La protección: En un sistema aislado cuando hacíamos login y entrábamos en
el sistema ya no debíamos preocuparnos por el dominio y nuestros derechos
pues el propio sistema operativo se encargaba de ello. Ahora en un sistema
distribuido el saber en qué dominio estamos dependerá del grado de
distribución del sistema:
o Las máquinas tienen dominios de protección totalmente separados.
Así cada máquina tiene usuarios con derechos independientes de
las del resto. Así para acceder a otra máquina debemos hacer un
telnet o rlogin (remote login) y tender un nombre de usuario y una
contraseña.
o Los sistemas pueden poseer tablas de conversión entre dominios
de máquinas diferentes. Así cuando el usuario accede a un sistema
remoto no necesita identificarse de nuevo ya que el sistema local
informa al remoto del usuario de que se trata.
o En un sistema distribuido los usuarios tienen un único dominio,
independientemente de la máquina del sistema en la que estén
trabajando; así con un único nombre de usuario es lícito entrar en
todas las máquinas del sistema con los mismos derechos.
Tipos de sistemas operativos distribuidos
Existen dos tipos de sistemas operativos
distribuidos que son el modelo monolítico y el
micronúcleo. El modelo monolítico es un sistema en el
que los servicios son gestionados por servidores que en su
mayoría forman parte del núcleo del propio sistema y por
tanto se encuentran dentro de su espacio protegido. En
cada nodo de su red se ejecuta el sistema completo e
internamente los diferentes núcleos se coordinan para llevar
a cabo la gestión de los recursos. Es el sistema tradicional y
su principal ventaja es la integración en un único espacio de
todos los servicios lo que permite llevarlo a la práctica con
un coste reducido (no son necesarios cambios de espacios
de direcciones ni transferencias de información entre
procesos).
Por otro lado, los modelos micronúcleo tienen un
sistema operativo que se reduce a un núcleo que
proporciona y gestiona lo más básico: memoria, procesos,
comunicación entre procesos; mientras que el resto de los
servicios viene dado por los servidores externos que se
pueden crear y destruir de manera dinámica y se pueden
situar en cualquier nodo de la red. Así pues el micronúcleo
es una capa de software que se encuentra en todas las
máquinas del sistema y que cubre el hardware
proporcionando un entorno básico. Sus principales ventajas
se centran en que son sistemas muy abiertos que permiten
al usuario adaptarse y evolucionar; utilizan servidores
externos que hacen que puedan emular modelos de sistema
y tienen una dimensión reducida que hace posible
desarrollarlos y depurarlos con facilidad; ello hace que
también puedan transportarse a plataformas diferentes con
mayor facilidad.
Texto elaborado a partir de:
Sistemas operativos
Teodor Jové Lagunas, Dolors Royo Vallés, Josep Lluís Marzo i Làzaro
Junio 2004