Sobre curvas paramétricas y polígonos de Newton
Anuncio

La Gaceta de la RSME, Vol. 11 (2008), Núm. 2, Págs. 317–336
317
La Columna de Matemática Computacional
Sección a cargo de
Tomás Recio
El objetivo de esta columna es presentar de manera sucinta, en cada
uno de los números de La Gaceta, alguna cuestión matemática en la que
los cálculos, en un sentido muy amplio, tengan un papel destacado. Para
cumplir este objetivo el editor de la columna (sin otros méritos que su
interés y sin otros recursos que su mejor voluntad) quisiera contar con la
colaboración de los lectores, a los que anima a remitirle (a la dirección
que se indica al pie de página1 ) los trabajos y sugerencias que consideren
oportunos.
En este número. . .
En este número de La Gaceta, presentamos un artículo firmado por dos jóvenes
(desde la perspectiva de la mayoría de los autores que contribuyen en esta Columna. . . , pero ya con un extenso curriculum matemático) investigadores Ramón y Cajal
de la Universidad de Barcelona, los doctores Carlos D’Andrea y Martín Sombra.
Se trata de dos excelentes matemáticos, oriundos (geográfica y matemáticamente) de Argentina, que trabajan —simplificando mucho— en diversos problemas de
Cálculo Simbólico en Geometría Algebraica y cuyo dinamismo y competencia contribuirán decisivamente al avance de este campo en nuestro país.
Por ejemplo, podemos señalar su implicación, como miembros del comité organizador, en el congreso europeo más prestigioso de este ámbito, el congreso MEGA
2009, que tendrá lugar en Barcelona, del 15 al 19 de junio del año próximo (ver
http://www.imub.ub.es/mega09/).
En este artículo, Carlos y Martín hacen una somera y elemental introducción
a la geometría de los objetos (curvas, superficies, etc.) definidos implícitamente como soluciones de ecuaciones polinomiales o, paramétricamente, mediante funciones
racionales, planteando el problema de la conversión de una a otra de estas formas
de representación. Su trabajo se centra, a continuación, en la obtención, a partir
de las ecuaciones paramétricas y sin necesidad de efectuar la costosa operación de
implicitar, de un objeto próximo a las ecuaciones implícitas asociadas: el polítopo
de Newton de una hipersuperficie dada paramétricamente.
El problema, interesante en sí mismo, completa su atractivo con la descripción de
las técnicas usadas para su resolución, que son introducidas de modo elemental por
1 Tomás Recio, Departamento de Matemáticas, Facultad de Ciencias, Universidad de Cantabria,
39071-Santander; tomas.recio@unican.es
318
La Columna de Matemática Computacional
los autores: la geometría tropical y la teoría de la intersección. Redondea el artículo
la Sección 3, dedicada a cálculos concretos y aplicaciones.
En la última sección se avanza en la otra dirección: cómo obtener información
sobre la parametrizabilidad de una curva, conocido su polígono de Newton.
El artículo está escrito de manera accesible (a pesar de tratarse de resultados
recientes y originales de la investigación de sus autores) y amena, incluyendo una
serie de referencias para saber más. Por todo ello confiamos en que este nuevo trabajo
de divulgación sea del agrado de los lectores de La Gaceta.
La Gaceta de la RSME, Vol. 11 (2008), Núm. 2, Págs. 319–336
319
Sobre curvas paramétricas y polígonos de Newton
por
Carlos D’Andrea y Martín Sombra
Proponemos al lector el siguiente problema elemental: sean
f (t) :=
(t + 1)2
,
2 t (t − 1)
g(t) :=
4 t (t − 1)3
.
(t + 1)5
(1)
dos funciones racionales. Encontrar el polinomio irreducible E(x, y) ∈ Z[x, y] tal que
E(f (t), g(t)) = 0. En otras palabras, se trata de determinar la ecuación implícita de
la curva plana parametrizada por t → (f (t), g(t)).
Mientras usted lo piensa un poco, aprovecharemos para introducir algunas nociones necesarias (y un poco más) para poner este problema en su contexto y discutirlo.
1.
Parametrizaciones vs ecuaciones en geometría algebraica
El estudio de los sistemas de ecuaciones polinomiales es el objeto central de la
geometría algebraica. Para ser más concretos, tomaremos como cuerpo base a C,
el cuerpo de los números complejos. De todas formas, la mayoría de nuestras consideraciones seguirán siendo válidas si se reemplaza a C por cualquier otro cuerpo
algebraicamente cerrado.
Por definición, un conjunto algebraico de Cn es el conjunto de ceros
{x ∈ Cn : f1 (x) = · · · = fs (x) = 0}
de una familia de polinomios multivariados f1 , . . . , fs ∈ C[x1 , . . . , xn ]. Una variedad
algebraica afín es un conjunto algebraico irreducible, en el sentido de que no es unión
finita de subconjuntos algebraicos propios.
Desde la misma definición de variedad, la geometría algebraica privilegia la representación por ecuaciones de los objetos geométricos. ¿Por qué no representarlos
por parametrizaciones?
Veamos cómo sería esto: dada una familia de funciones racionales ρ1 , . . . , ρn ∈
C(t1 , . . . , tm ) consideramos la aplicación racional
ρ : Cm Cn ,
t = (t1 , . . . , tm ) → (ρ1 (t), . . . , ρn (t)),
que está bien definida fuera de los puntos donde el denominador de alguna de las ρi se
anula. La imagen de un tal morfismo es “casi” una variedad algebraica: precisamente,
existe una (única) variedad V que contiene a la imagen Im(ρ) y tal que esta imagen
320
La Columna de Matemática Computacional
contiene un abierto denso de V . Esta variedad se llama la clausura de Zariski de la
imagen de ρ y la denotaremos Im(ρ).
2t2
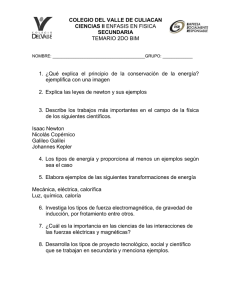
Por ejemplo, consideremos la aplicación racional C C2 , t → t24t
+4 , t2 +4 .
Esta parametrización es la inversa de la proyección estereográfica de dimensión 1
(figura 1). Cuando t recorre C, la aplicación recorre todos los puntos de la circunferencia definida por la ecuación x2 + (y − 1)2 = 1 salvo el polo norte N = (0, 1).
De hecho, se sabe que una aplicación racional no constante ρ : C Cn (n = 2, 3)
recorre todos los puntos de una curva algebraica, salvo a lo más uno [2, 14].
N
ρ(t)
t
Figura 1: La proyección estereográfica de dimensión 1.
Una de las preocupaciones importantes de la geometría algebraica computacional
es el problema de la implicitación, consistente en calcular ecuaciones de una variedad
V a partir de una aplicación racional ρ : Cm Cn tal que V = Im(ρ). La versión
más corriente del problema es para hipersuperficies, es decir, cuando la codimensión
de V es 1. En este caso, el ideal de definición de V está generado por un solo
polinomio irreducible: se trata entonces de calcular esta “ecuación implícita”.
Recíprocamente, ¿es cierto que toda variedad algebraica se puede parametrizar
por polinomios o por funciones racionales, al menos en un abierto denso? Lamentablemente, la respuesta es “no” incluso para el caso más simple: las curvas planas.
En un sentido estricto, una parametrización de una variedad V de dimensión r
es una aplicación racional ρ : Cr V tal que Im(ρ) = V . Decimos “una” y no “la”
parametrización porque de hecho hay muchas: por ejemplo, dada una parametrización ρ de una curva y una función racional ϕ(t) ∈ C(t) \ C, entonces ρ ◦ ϕ es otra
parametrización de la misma curva. Las variedades que admiten parametrizaciones
reciben un nombre especial, son las variedades paramétricas (o unirracionales). Si
además la parametrización es invertible sobre un abierto denso, se dice que ρ es
birracional y que la variedad es racional. Las nociones de variedad paramétrica y de
variedad racional coinciden para los casos de curvas (teorema de Lüroth) y de superficies (teorema de Castelnuovo), pero para toda dimensión ≥ 3 existen variedades
paramétricas que no son racionales.
Hemos visto que la circunferencia es una curva paramétrica. Más generalmente, toda cónica (curva plana definida por una ecuación irreducible de grado 2) es
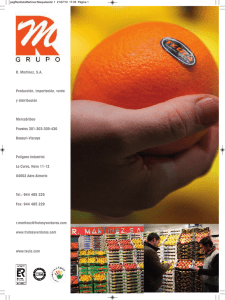
paramétrica. Para grados superiores esto ya no es cierto. Por ejemplo, el folio de
Descartes (figura 2) está definido por la ecuación x3 + y 3 − 3xy = 0 y se puede
La Gaceta Secciones
321
parametrizar por
t →
3t
3t2 .
,
1 + t3 1 + t3
(2)
1,5
1,0
0,5
−2
−1
0
1
0,0
−0,5
−1,0
−1,5
Figura 2: El folio de Descartes.
Sin embargo, la cúbica de Fermat F = {(x, y) ∈ C2 : x3 +y 3 = 1}, aparentemente
más sencilla, no admite ninguna parametrización.
Esta situación contrasta fuertemente con lo que ocurre en geometría lineal, diferencial o analítica, donde las variedades correspondientes pueden definirse tanto por
ecuaciones como en forma paramétrica, al menos localmente. Hay razones profundas para que sea así, y en parte se debe a la rigidez de los objetos de la geometría
algebraica. Por ejemplo, se puede ver que la cúbica de Fermat es topológicamente isomorfa a un toro menos tres puntos. Una aplicación birracional no constante
C F necesariamente es un isomorfismo entre C menos un conjunto finito y F
menos un conjunto finito. Si tal aplicación existiera, induciría un homeomorfismo
entre el plano menos un conjunto finito y el toro menos un conjunto finito, lo cual
es imposible. Luego la cúbica de Fermat no puede ser racional y, por el teorema de
Lüroth, tampoco paramétrica.
En todo caso, la clase de las variedades paramétricas es muy rica e importante,
tanto desde el punto de vista teórico como práctico. En diseño geométrico asistido por
ordenador (CAGD por sus siglas en inglés: Computer Aided Geometric Design) las
curvas y superficies paramétricas juegan un rol central, ya que proporcionan formas
fáciles de dibujar. En efecto, la parametrización permite producir muchísimos puntos
en la variedad utilizando solamente las operaciones elementales (±, ×, ÷) del cuerpo
base. En cambio, es más difícil producir puntos a partir de sus ecuaciones implícitas.
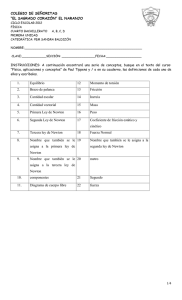
Un pequeño experimento demuestra lo dicho: pídale al programa de cálculo simbólico Maple que dibuje el folio de Descartes usando sólo la ecuación implícita
x3 +y 3 −3xy. El resultado es pobre, especialmente alrededor del punto singular (0, 0)
(figura 3). Esto se debe a que, para obtener puntos en el folio de esta manera, hay que
resolver cada vez una ecuación cúbica y, para colmo de males, los puntos producidos
no son racionales sino que están en una extensión de grado 3 de Q.
Por otro lado, para decidir si un punto dado está o no en la curva es mejor contar
con la ecuación implícita. Por ejemplo, es inmediato concluir que el punto (−2, 1) no
322
La Columna de Matemática Computacional
Figura 3: El folio de Descartes según el comando de Maple implicitplot.
está en el folio de Descartes evaluando la ecuación: (−2)3 + 13 − 3(−2) = −1 = 0. Si,
en cambio, quisiéramos averiguarlo a partir de la parametrización, tendríamos que
determinar si el sistema de ecuaciones
3t
= −2,
1 + t3
3t2
=1
1 + t3
tiene o no solución para t ∈ C, lo cual no sólo es más difícil, sino que hasta podría
ocurrir que el punto esté en la curva pero no en la imagen de la parametrización.
Es por esto que, dependiendo de lo que se quiera saber sobre una cierta variedad
paramétrica, puede que convenga disponer de la representación paramétrica o de la
implícita, y ciertamente sería útil poder pasar ágilmente de una representación a la
otra.
Desde un punto de vista computacional, la implicitación se obtiene eliminando
los parámetros de un cierto sistema de ecuaciones. Por ejemplo, para calcular la
ecuación del folio a partir de la parametrización (2) hay que “eliminar” la variable t
del sistema de ecuaciones
(1 + t3 ) x − 3t = 0,
(1 + t3 ) y − 3t2 = 0,
es decir, encontrar la ecuación en C[x, y] que verifican los puntos (x, y, t) que satisfacen este sistema de ecuaciones. Esta tarea de eliminación puede hacerse tanto con
bases de Gröbner como con resultantes [4].
El mismo procedimiento funciona en general. Para el caso de curvas planas,
escribiremos la parametrización como
p(t) q(t) ,
ρ(t) =
r(t) s(t)
para polinomios p, q, r, s tales que gcd(p, r) = 1 y gcd(q, s) = 1. Luego, la ecuación
implícita se obtiene al eliminar t de las ecuaciones
r(t) x − p(t) = 0,
s(t) y − q(t) = 0.
Si llamamos E(x, y) a la ecuación de la curva imagen, en términos de la resultante
de Sylvester se tiene
E(x, y)ind(ρ) = Res r(t) x − p(t), s(t) y − q(t); t
La Gaceta Secciones
323
donde ind(ρ) ≥ 1 es el índice de trazado (o grado) de la parametrización en la
terminología de [14], es decir, la cantidad de veces que ρ(t) recorre la curva cuando
t se mueve por C.
2.
El polítopo de Newton de la ecuación implícita
El problema en el cual centraremos este artículo es el de determinar el polítopo de Newton de la ecuación implícita de una hipersuperficie presentada en forma
paramétrica. Trabajaremos con polinomios de Laurent, es decir expresiones del tipo
−2
x−1
2 + x1 x2 donde los exponentes pueden ser números enteros cualesquiera.
Definición 1. El polítopo de Newton N(F ) ⊂ Rn de un polinomio de Laurent
±1
F ∈ C[x±1
1 , . . . , xn ] es la envolvente convexa de los exponentes en el desarrollo
monomial de F .
Por extensión, el polítopo de Newton N(Z) de una hipersuperficie Z ⊂ Cn es
el polítopo de Newton de su ecuación de definición. Salvo por un factor escalar,
esta ecuación es única y por lo tanto N(Z) está bien definido. Para el caso n =
2 utilizaremos la denominación más usual de “polígono” de Newton, en lugar de
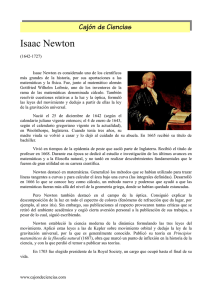
“polítopo”. Por ejemplo, el
del folio x31 + x32 − 3x1 x2 = 0 es la
polígono de Newton
envolvente convexa Conv (1, 1), (3, 0), (0, 3) (figura 4).
Figura 4: El polígono de Newton del folio de Descartes.
El polítopo de Newton nos dice cuáles son los posibles exponentes de los monomios en un polinomio de Laurent dado: si el polítopo es pequeño entonces el
polinomio es ralo, en el sentido de que tiene pocos monomios. Es un refinamiento de
la noción de grado: si llamamos S := Conv(0, e1 , . . . , en ) al símplex estándar de Rn ,
entonces el grado de un polinomio F ∈ C[x1 , . . . , xn ] es el menor entero d tal que
N(F ) ⊂ dS. De paso notamos que el polítopo de Newton de un polinomio (y a fortiori
el de una hipersuperficie afín) está siempre contenido en el primer octante (R≥0 )n .
De manera general, el problema que nos interesa es el siguiente: sean ρ1 , . . . , ρn ∈
C(t1 , . . . , tn−1 ) y consideremos la aplicación racional
ρ : Cn−1 Cn ,
t = (t1 , . . . , tn−1 ) → (ρ1 (t), . . . , ρn (t)).
equivalentemente, que la matriz
Supondremos
i que Im(ρ) es una hipersuperficie o n−1
jacobiana ∂ρ
(t)
es
de
rango
n
−
1
para
t
∈
C
genérico. Se quiere entonces
∂tj
i,j
determinar el polítopo de Newton de esta hipersuperficie.
324
La Columna de Matemática Computacional
El polítopo de Newton no determina la hipersuperficie pero retiene mucha información relevante. Por otra parte, calcularlo resulta sorprendentemente más sencillo
que implicitar en una gran cantidad de situaciones. En lo que sigue describiremos
algunos de estos hechos.
El polítopo de Newton de la ecuación implícita ha despertado mucho interés en
los últimos años debido a su conexión con la geometría tropical, la combinatoria,
la teoría de intersección y el álgebra lineal numérica. Una versión de este problema
fue planteada por primera vez por B. Sturmfels y J.-T. Yu. En el espíritu de la
teoría de la eliminación rala, la pregunta de Sturmfels y Yu podría resumirse en
¿puedo conocer el polítopo de la ecuación implícita a partir de los polítopos de la
parametrización? De manera más formal:
Problema 2. Sean P1 , . . . , Pn ⊂ Rn−1 polítopos enteros con interior no vacío y consideremos la familia de n polinomios de Laurent en n − 1 variables
±1
λi,a ta1 1 · · · tann ∈ C[t±1
ρi =
1 , . . . , tn−1 ]
a∈Pi ∩Zn−1
para 1 ≤ i ≤ n y λi,a ∈ C genéricos. Determinar el polítopo de Newton de la imagen
de la parametrización t → (ρ1 (t), . . . , ρn (t)).
Un polítopo P ⊂ Rn−1 es entero si sus vértices están en Zn−1 . La hipótesis de
que los Pi ’s tienen interior no vacío garantiza que la imagen de la parametrización
es una hipersuperficie. En este problema, la elección genérica de los coeficientes λi,a
(es decir, dentro de un abierto denso del espacio de todos los coeficientes posibles)
garantiza que el polítopo de Newton de la ecuación no depende de estos coeficientes,
aunque la ecuación misma sí que depende.
Como ejemplo del problema que nos interesa, consideremos la parametrización
propuesta por A. Dickenstein y R. Fröberg [8]:
(3)
t → t48 − t56 − t60 − t62 − t63 , t32 .
ρ : C C2 ,
Los polítopos de Newton de los polinomios que la definen son relativamente
pequeños: el intervalo [48, 63] y el punto {32}. Los exponentes son un poco grandes
pero de todas formas la ecuación implícita se puede calcular usando la resultante de
Sylvester correspondiente; es interesante notar que el algoritmo de bases de Gröbner
no termina en tiempo razonable en este caso. Con la ecuación en la mano (o, mejor
dicho, ¡en el ordenador!), veamos qué pasa con su polígono de Newton (figura 5).
¡Es justamente el triángulo con vértices (32, 0), (0, 48), (0, 63)!
¿Por qué ocurre esto? El problema fue estudiado por I. Emiris e I. Kotsireas,
quienes lograron calcular este polígono vía especializaciones de la resultante, mostrando así que es posible acceder al polítopo de Newton sin tener que pasar por el
cálculo completo de la ecuación implícita [8].
El problema cobró verdadero impulso con la aparición de la geometría tropical.
La variedad tropical asociada a una hipersuperficie afín es un objeto poliedral, equivalente al polítopo de Newton en el sentido de que se puede recuperar el uno a partir
del otro. Esta interpretación permite abordar el problema con nuevas herramientas
La Gaceta Secciones
325
60
50
40
30
20
10
10
20
30
Figura 5: El polígono de Newton de la ecuación implícita de (3).
geométricas y de esta forma B. Sturmfels, J. Tevelev y J. Yu lograron explicitar la
variedad tropical asociada a las parametrizaciones genéricas del problema 2 [15, 16],
e incluso han implementado en ordenador el cálculo de esta variedad tropical y la
construcción del polítopo de Newton a partir de la misma [17, 18]. Esta implementación funciona satisfactoriamente en dimensión baja.
Desde otra dirección, A. Esterov y A. Khovanskiı̆ han mostrado que el polítopo de
la ecuación implícita de una parametrización genérica se identifica con el “polítopofibra mixto” en el sentido de P. McMullen, dando así una caracterización distinta de
este objeto [9].
2.1.
El polígono de Newton de una curva paramétrica
A pesar del interés evidente del caso genérico, es claro que, para poder determinar
el polítopo de la ecuación implícita en todos los casos, será necesario considerar invariantes más finos que los polítopos de Newton de la parametrización. En lo que sigue
nos centraremos en el caso de curvas paramétricas planas, resuelto recientemente
gracias a los trabajos [5, 6, 15, 20].
En el caso de curvas, el polígono de Newton está unívocamente determinado por
las multiplicidades de la parametrización. Sea ρ : C C2 una parametrización
racional dada por funciones no constantes f, g ∈ C(t) \ C. Dado un punto v ∈ P1 , la
multiplicidad de ρ en v se define como
ordv (ρ(t)) := ordv (f (t)), ordv (g(t)) ∈ Z2 ,
donde ordv (f ) designa el orden de anulación de la función f en el punto v. Recordemos que P1 es la recta proyectiva y que se identifica con C {∞}. El orden de
anulación en v = ∞ de una función racional pq ∈ C(t), escrita como cociente de dos
polinomios, es ord∞ (f ) = deg(q) − deg(p).
Las propiedades básicas de estas multiplicidades son:
ordv (ρ) = (0, 0) para todo v ∈ P1 , salvo un número finito, y
v∈P1 ordv (ρ) = (0, 0).
326
La Columna de Matemática Computacional
Definimos una operación auxiliar que produce un polígono convexo a partir de
una familia de vectores en el plano cuya suma es cero. Sea B ⊂ Z2 una familia
de vectores que son nulos salvo un número finito y tales que su suma es (0, 0).
Denotaremos por P(B) ⊂ (R≥0 )2 al (único) polígono convexo que se obtiene al:
1) rotar −90 grados los vectores no nulos de B, 2) concatenarlos siguiendo sus
direcciones en el sentido contrario a las agujas del reloj y 3) transladarlos al cuadrante
(R≥0 )2 de forma que toque los ejes coordenados (figura 6). La condición de que la
suma de los vectores en B sea cero es equivalente a que el polígono se “cierre” al
finalizar el proceso de concatenación.
B ⊂ Z2
1)
×2
×2
2)
3)
P(B)
Figura 6: La operación P(B).
Recordemos que el índice de trazado ind(ρ) ≥ 1 de la parametrización es el
número de puntos en la preimagen de un punto genérico de Im(ρ); es decir, es el
número de veces que ρ(t) “traza” o recorre la curva. En particular, la parametrización
es birracional si y sólo si ind(ρ) = 1.
La respuesta al problema del cálculo del polígono de Newton de una curva plana paramétrica puede encontrarse en los trabajos de Dickenstein, E.-M. Feichtner,
Sturmfels y Tevelev [6, 15, 20], y también en nuestro artículo [5].
Teorema 3. Sea ρ : C C2 una parametrización racional y C := Im(ρ). Entonces
(4)
ind(ρ) N(C) = P (ordv (ρ))v∈P1 .
La “multiplicación” ind(ρ) N(C) en este enunciado es la homotecia de razón ind(ρ)
del polígono de Newton de C.
La Gaceta Secciones
327
Ejemplo 4. Consideremos la parametrización
ρ : t →
t2 − 5t + 2 1
,
.
t(t − 1)
t
Las multiplicidades de esta parametrización son
ord0 (ρ) = (−1, −1),
ord1 (ρ) = (−1, 0),
ord∞ (ρ) = (2, −1)
y ordvi (ρ) = (0, 1) para cada uno de los dos ceros simples v1 , v2 de t2 −5t+2, mientras
que ordv (ρ) = (0, 0) para v = 0, ±1, ∞, v1 , v2 . La figura 6 ilustra esta familia B de
vectores y el polígono P(B) que se construye a partir de ella.
Gracias al teorema 3, sabemos que este polígono es la homotecia de razón ind(ρ)
del polígono N(Z). Más aún, vemos que este polígono es no-contráctil, en el sentido
de que no es un múltiplo por un entero ≥ 2 de otro polígono entero. Concluimos así
que ind(ρ) = 1 y que P(B) es el polígono de Newton de la curva Z.
Podemos verificar este resultado comparándolo con la ecuación implícita:
E(x, y) = 1 − 16x − 4x2 − 9xy − 2x2 y − xy 2 .
2.2.
(5)
Relación con la geometría tropical y la teoría de intersección
Ya hemos visto y probado el plato principal; ahora toca enterarse un poco sobre la
cocina. Hay dos métodos para demostrar este resultado: geometría tropical y teoría
de intersección.
En geometría tropical, la base es el semianillo (R, ⊕, ) donde las operaciones
son
x ⊕ y = min(x, y),
x y = x + y.
Para simplificar la exposición, hablaremos sólo del caso de polinomios en C[x, y],
aunque la teoría se extiende a polinomios multivariados con coeficientes en un cuerpo
provisto de una valoración.
N
La tropicalización de un polinomio F = j=0 λj xaj y bj ∈ C[x, y] es la función
cóncava lineal a trozos
tF : R2 R,
x →
N
xaj y bj = minj (aj , bj ), (x, y),
(6)
j=0
donde
es la sumatoria tropical y ·, · el producto escalar usual de R2 .
La variedad tropical TF ⊂ R2 se define como el conjunto de puntos de R2 donde
esta función no es diferenciable. Se deduce de (6) que TF consiste exactamente en la
reunión de las direcciones normales interiores a los lados del polígono N(F ). A cada
una de estas direcciones δ se le asigna una multiplicidad mδ ≥ 1 que, en el caso que
consideramos de un polinomio de C[x, y], coincide con la longitud entera de la arista
de N(F ) normal a esta dirección. La longitud entera (S) de un segmento entero
S ⊂ Z2 es la cantidad de puntos de Z2 que hay en él (incluyendo los extremos)
menos 1.
328
La Columna de Matemática Computacional
2
1
1
1
Figura 7: La curva tropical asociada a (5).
La figura 7 muestra la variedad tropical asociada a la curva definida por la ecuación (5). Como vemos, la variedad tropical, más las multiplicidades correspondientes,
se identifica con los vectores en la figura 6, por lo que el teorema 3 puede reformularse
fácilmente en términos de geometría tropical.
Esta reinterpretación permite ver al polígono de Newton como una cierta degeneración de la curva paramétrica original y estudiarlo con las herramientas de la
geometría tropical. La demostración de Sturmfels y sus colaboradores del teorema 3
se basa principalmente en el llamado “teorema de Kapranov” [7]. Más aún, este método les ha permitido tratar hipersuperficies de dimension arbitraria parametrizadas
por productos de formas lineales [6, 15], generalizando así el caso de curvas planas.
Por otra parte, en nuestro artículo [5] proponemos un método que reduce la
determinación del polítopo de Newton a un problema de teoría de intersección y, más
concretamente, al cálculo del número de soluciones de ciertos sistemas de ecuaciones
polinomiales.
La función soporte de un polítopo Q ⊂ Rn se define como
hQ : Rn R,
x → max{u, x : u ∈ Q},
que es una función convexa y afín a trozos que caracteriza a Q. Sean ρ : C C2
una parametrización racional y C := Im(ρ), entonces para σ ∈ (N \ {0})2 se tiene
hN(C) (σ) =
1
# (t, x, y) ∈ C3 : xσ1 = f (t), y σ2 = g(t), 0 + 1 x + 2 y = 0 (7)
ind(ρ)
para 0 , 1 , 2 ∈ C genéricos. La demostración del teorema 3 se reduce así al cálculo
de este número de soluciones, que, a su vez, se obtiene vía el refinamiento del teorema
de Bernštein-Kušnirenko-Khovanskiı̆ recientemente obtenido por P. Philippon y el
segundo autor [13].
La igualdad (7) se extiende a cualquier dimensión. Sin embargo, esto no ha
servido aún para calcular el polítopo de Newton de otras hipersuperficies debido a
la ausencia de un análogo de la estimación de [13] en dimensión superior.
3.
Algunos cálculos y aplicaciones
Tal vez usted ya llegó (o no) a la solución del problema que le propusimos al
principio de este artículo. En cualquier caso, es instructivo ver cómo se resuelve a la
La Gaceta Secciones
329
luz del teorema 3. Para la parametrización ρ = (f, g) asociada a las funciones en (1)
se tiene
ord−1 (ρ) = (2, −5),
ord0 (ρ) = (−1, 1),
ord1 (ρ) = (−1, 3),
ord∞ (ρ) = (0, 1),
mientras que ordv (ρ) = (0, 0) para v = 0, ±1, ∞. Gracias al teorema 3 sabemos que
ind(ρ) N(C) se obtiene girando −90◦ estos vectores y concatenándolos; el polígono
producido es el cuadrilátero Conv((0, 0), (1, 0), (4, 1), (5, 2)). Nuevamente observamos
que el polígono es no-contráctil, luego ind(ρ) = 1 y por lo tanto este cuadrilátero es
el polígono de Newton de la ecuación implícita E(x, y) ∈ Z[x, y] (figura 8).
Figura 8: Las multiplicidades y el polígono de Newton de la parametrización (1).
Esta ecuación es combinación lineal de los monomios 1, x, x4 y, x5 y 2 y x3 y correspondientes a los puntos enteros en el cuadrilátero, y de aquí se deduce fácilmente
E(x, y) = 1 − 2x + 2x4 y − x5 y 2 + 5x3 y.
A manera de ejercicio, invitamos al lector a aplicar el teorema 3 para calcular
el polígono de Newton de la circunferencia y del folio de Descartes a partir de sus
respectivas parametrizaciones. Asimismo, se verifica fácilmente que el polígono de
Newton de la ecuación de la curva parametrizada por (3) es el triángulo con vértices
(32, 0), (0, 48) y (0, 63) que se ve en la figura 5. Una vez más, el dato adicional
ind(ρ) = 1 es consecuencia de que el polígono es no-contráctil.
3.1.
¿Para qué nos puede servir conocer el polítopo de Newton?
Además de su interés intrínseco, el polítopo de Newton nos puede servir para resolver otros problemas computacionales acerca de las hipersuperficies paramétricas.
Señalemos dos de estas aplicaciones.
Conocer el polítopo de Newton nos permite calcular la ecuación implícita vía
un algoritmo de interpolación. Supongamos que nos han dado una parametrización
ρ = (f, g) : C C2 y queremos saber su ecuación implícita. Si aplicamos el
teorema 3 obtenemos inmediatamente el polígono de Newton Q ⊂ R2 de la ecuación
que estamos buscando.
330
La Columna de Matemática Computacional
¿Y luego? Pues bien, la ecuación ha de ser de la forma
E(x, y) =
N
λj xaj y bj
j=0
donde los (aj , bj ) son los puntos enteros en Q y los λj ∈ C son desconocidos. Luego
evaluamos la parametrización en N + 1 puntos τ0 , . . . , τN ∈ C para los que ρ(τi ) esté
definido, y obtenemos un sistema lineal en los λj , homogéneo de tamaño (N + 1) ×
(N + 1):
N
E(ρ(τk )) =
λj f (τk )aj g(τk )bj = 0, para 0 ≤ k ≤ N.
j=0
Si hemos elegido los puntos interpolación τk de manera suficientemente general, el
núcleo de este sistema será de dimensión 1 y la ecuación E estará unívocamente
determinada como un generador de este núcleo. Este algoritmo es particularmente
ventajoso cuando la cantidad de puntos enteros en el polítopo es pequeña.
Un problema que se presenta a menudo en CAGD es el de determinar cómo se
cortan las curvas o las superficies paramétricas que se quieren modelar. Normalmente
este problema se resuelve implicitando una de las dos variedades. Si, en lugar de
conocer la ecuación implícita, tenemos sólo el polítopo de Newton, no podremos
calcular esta intersección pero sí que podremos estimar cuántos puntos hay (si la
intersección es de dimensión 0) o cuál es el grado de la curva que resulta de esta
intersección (si la intersección es de dimensión 1).
En el caso de dos curvas planas distintas C, D ⊂ C2 , el teorema de BernšteinKušnirenko-Khovanskiı̆ dice que el número de puntos de (C \ {0})2 en común es,
típicamente, igual al volumen mixto
Area(N(C) + N(D)) − Area(N(C)) − Area(N(D)),
donde el “+” es la suma puntual de los polígonos (suma de Minkowski). Por ejemplo,
consideremos las curvas C, D ⊂ (C \ {0})2 parametrizadas respectivamente por
t →
(t + 1)2 4 t (t − 1)3 ,
,
2 t (t − 1) (t + 1)5
10 t → t, 3 .
t
La curva C es la del problema al principio del artículo. En la parte izquierda de la
figura 9 vemos los polígonos correspondientes junto con su suma de Minkowski. El
volumen mixto es el área de la zona rayada y es por lo tanto igual a 2.
Como consecuencia, estas curvas C y D tienen a lo más dos puntos en común,
que son los puntos (1.33, 4.22) y (−4.17, −0.14) (figura 9).
3.2.
Parametrizaciones genéricas
Con lo que ya sabemos, podemos calcular fácilmente el polígono de Newton de
cualquier curva paramétrica plana que se nos cruce en el camino. En particular,
podemos responder el problema 2 para el caso de curvas planas.
La Gaceta Secciones
331
6
5
4
3
2
1
0
−5,0
−7,5
−2,5
0,0
2,5
−1
−2
Figura 9: La intersección de dos curvas paramétricas.
Corolario 5 (Polinomios de Laurent genéricos). Dados D ≥ d, E ≥ e, sean
p(t) = αd td + · · · + αD tD ,
q(t) = βe te + · · · + βE tE
∈ C[t±1 ]
(8)
tales que αd , αD , βe , βE = 0 y gcd(t−d p(t), t−e q(t)) = 1. Sean ρ = (p, q) y C := Im(ρ).
Entonces
1
P (D − d, 0), (0, E − e), (−D, −E), (d, e) .
N(C) =
ind(ρ)
Luego las parametrizaciones definidas por polinomios de Laurent genéricos producen, típicamente, ecuaciones cuyo polígono es un cuadrilátero (figura 10).
D
d
e
E
Figura 10: El polígono de Newton de una parametrización de Laurent genérica.
La demostración de este corolario es sencilla: por un lado se tiene ord0 (ρ) = (d, e)
y ord∞ (ρ) = (−D, −E). Por otro lado, si llamamos v1 , . . . , vr = 0 a las diferentes
raíces de t−d p(t) y denotamos por mi ≥ 1 la multiplicidad de vi en p, se tiene
ordvi (ρ) = (mi , 0),
para 1 ≤ i ≤ r,
ya que p y q no tienen raíces = 0 en común. Similarmente, sean w1 , . . . , ws = 0 las
raíces de t−e q(t) y nj ≥ 1 su respectiva multiplicidad. Entonces
ordwj (ρ) = (0, nj ).
332
La Columna de Matemática Computacional
El teorema 3 muestra que el polígono ind(ρ) N(C) se obtiene girando −90◦ y concatenando los vectores (d, e), (−D, −E), (mi , 0) y (0, nj ), para 1 ≤ i ≤ r y 1 ≤ j ≤ s.
Pero los (mi , 0) están
todos en la misma dirección y por lo tanto se concatenan
juntos en el vector i (mi , 0) = (D − d, 0). Similarmente, los (0, nj ) se concatenan
en el vector j (0, nj ) = (0, E − e), lo cual concluye la demostración.
Más aún, se puede mostrar que para una parametrización asociada a polinomios
de Laurent p, q como en (8), el polígono de Newton de la ecuación es
1
P (D − d, 0), (0, E − e), (−D, −E), (d, e)
ind(ρ)
si y sólo si αd , αD , βe , βE = 0 y gcd(t−d p(t), t−e q(t)) = 1. Además, si los vectores (D − d, 0), (0, E − e), (d, e) no son colineales y p, q son genéricos, entonces ρ es
birracional.
La demostración anterior ilustra un aspecto importante del cálculo del polígono
de Newton en situaciones concretas. El polígono no depende de las raíces de p y
de q ni de sus multiplicidades, sino sólo del hecho de que son disjuntas y de que
conocemos cuánto es la suma de las multiplicidades. Este es un principio general
que permite calcular el polígono de Newton de una parametrización ρ = (f, g) a
partir de factorizaciones parciales de la forma
p(t)dp ,
g(t) = β
p(t)ep
f (t) = α
p∈P
p∈P
donde P ⊂ C[t] es un conjunto finito de polinomios coprimos dos a dos, dp , ep ∈ N y
α, β ∈ C\{0}. Tales factorizaciones se pueden obtener usando solamente la operación
de máximo común divisor de dos polinomios en una variable y sin necesidad de
acceder a los ceros y polos de f y g, lo cual sería demasiado costoso desde un punto
de vista computacional.
Volviendo a las parametrizaciones genéricas, el siguiente caso a considerar es el
de dos funciones racionales con el mismo denominador. El polígono de Newton que
resulta tiene a lo más cinco lados (figura 11).
Corolario 6. Dados D ≥ d, E ≥ e y F ≥ 0, sean
p(t) = αd td + · · · + αD tD , q(t) = βe te + · · · + βE tE ,
Sean ρ = pr , qr ∈ C(t)2 y C := Im(ρ). Entonces
N(C) =
r(t) = γ0 + · · · + γF tF .
1
P (D − d, 0), (0, E − e), (F − D, F − E), (d, e), (−F, −F )
ind(ρ)
si y sólo si αd , αD , βe , βE , γ0 , γF = 0 y t−d p(t), t−e q(t), r(t) son coprimos dos a dos.
El último caso que consideraremos es el de parametrizaciones genéricas por funciones racionales con distinto denominador. El polígono que resulta tiene a lo más
seis lados (figura 12).
La Gaceta Secciones
333
D
(E − F, D − F )
d
e
E
Figura 11: El polígono de una parametrización genérica por funciones racionales
con el mismo denominador.
Corolario 7. Dados D ≥ d, E ≥ e, F, G ≥ 0, sean
p(t) = αd td + · · · + αD tD ,
q(t) = βe te + · · · + βE tE
∈ C[t±1 ]
y
s(t) = δ0 + · · · + δG tG
r(t) = γ0 + · · · + γF tF ,
Sean ρ = pr , qs y C := Im(ρ). Entonces
N(C) =
∈ C[t].
1
P (D − d, 0), (0, E − e), (F − D, G − E), (d, e), (−F, 0), (0, −G)
ind(ρ)
si y sólo si αd , αD , βe , βE , γ0 , γF , δ0 , δG = 0 y t−d p(t), t−e q(t), r(t), s(t) son coprimos
dos a dos.
D
(G, D)
(E, F )
d
e
E
Figura 12: El polígono de una parametrización genérica por funciones racionales
con denominadores distintos.
4.
El caso general vs el caso genérico
Ahora le proponemos que mire en la otra dirección: supongamos que tenemos un
polinomio E(x, y) y sospechamos que define una curva paramétrica. ¿Qué podríamos
averiguar a partir de su polígono de Newton?
Una primera pregunta natural es cuáles son las formas posibles para el polígono
de Newton de una curva paramétrica. Como acabamos de ver, los polígonos que
334
La Columna de Matemática Computacional
producen las parametrizaciones genéricas son muy especiales: tienen a lo más seis
lados, algunos de los cuales están en direcciones prefijadas.
Para poder responder a esta pregunta, fijemos un polígono entero Q ⊂ (R≥0 )2 ,
2
con interior no vacío y apoyado en los ejes coordenados. Identificamos con C#(Q∩Z )
al espacio de los polinomios con polígono de Newton contenido en Q. Consideramos
entonces el conjunto
◦
:= F ∈ C[x, y] : N(F ) = Q, F define una
MQ
2
curva paramétrica de C2 ⊂ C#(Q∩Z )
y sea MQ su clausura de Zariski. Recordamos que ∂Q designa el borde del polígono Q.
Teorema 8 ([5]). MQ es una variedad paramétrica de dimensión #(∂Q ∩ Z2 ).
En particular, dim(MQ ) ≥ 3, ya que Q tiene al menos tres lados, por ser un
polígono de interior no vacío. Resulta así que todo polígono entero, con interior no
vacío y apoyado en los ejes coordenados es el polígono de Newton de una curva
paramétrica.
Como consecuencia de este resultado, la codimensión de MQ es igual al número de puntos enteros en el interior del polígono. Por ejemplo, el cuadrilátero
Conv((0, 0), (1, 0), (4, 1), (5, 2)) del problema al principio de este artículo contiene
un solo punto entero en su interior, y por lo tanto la variedad MQ correspondiente
es una hipersuperficie.
Este fenómeno es de interés para el problema computacional inverso a la implicitación: dado E(x, y) ∈ C[x, y], se trata de decidir si define o no una curva paramétrica
y, en el caso afirmativo, calcular una parametrización.
Si el polígono de Newton de la ecuación E(x, y) tiene muchos puntos en su
interior, entonces la probabilidad de que defina una curva racional es baja. Si de todas
formas la ecuación define una curva racional, la parametrización correspondiente está
definida por #(∂Q ∩ Z2 ) grados de libertad y por lo tanto la eficiencia del cálculo de
una parametrización debería estar correlacionada con la cantidad de puntos enteros
en el borde de Q y no tanto con la cantidad de puntos enteros en todo Q.
Para saber más:
Curvas paramétricas en general: [1, 2, 14, 21].
Métodos de interpolación relacionados con implicitación: [3, 10, 19].
Polítopo de Newton de la ecuación implícita y geometría tropical: [6, 12,
15, 16, 17].
Polítopo de Newton y polítopo-fibra mixto: [9, 11].
Polítopo de Newton y teoría de la intersección: [5, 13].
La Gaceta Secciones
335
Agradecimientos: Agradecemos a Teresa Cortadellas, Antonio J. Di Scala, Tomás
Recio y a los árbitros anónimos por sus numerosos comentarios y sugerencias sobre una
primera versión de este texto. Los autores son investigadores del Programa Ramón y Cajal del Ministerio de Educación y Ciencia y participan de los proyectos de investigación
MTM2007-67493 (D’Andrea) y MTM2006-14234 (Sombra).
Referencias
[1] S.S. Abhyankar, Algebraic geometry for scientists and engineers, Amer. Math.
Soc., 1990.
[2] C. Andradas y T. Recio, Plotting missing points and branches of real parametric curves, AAECC 18 (2007), 107–126.
[3] R.M. Corless, M.W. Giesbrecht, I. Kotsireas y S.M. Watt, Numerical
implicitization of parametric hypersurfaces with linear algebra, Lecture Notes
in Comput. Sci. 1930, 174–183, Springer, 2001.
[4] D. Cox, J. Little y D. O’Shea, Using algebraic geometry. Second edition,
Graduate Texts in Math. 185, Springer, 2005.
[5] C. D’Andrea y M. Sombra, The Newton polygon of a rational plane curve,
e-print arXiv:0710.1103, 26 pp.
[6] A. Dickenstein, E.-M. Feichtner y B. Sturmfels, Tropical discriminants,
J. Amer. Math. Soc. 20 (2007), 1111–1133.
[7] M. Einsiedler, M. Kapranov y D. Lind, Non-Archimedean amoebas and
tropical varieties, J. Reine Angew. Math. 601 (2006), 139–157.
[8] I. Emiris y I. Kotsireas, Implicitization exploiting sparseness, DIMACS Ser.
Discrete Math. Theoret. Comput. Sci. 67, 281–298, Amer. Math. Soc., 2005.
[9] A. Esterov y A. Khovanskiı̆, Elimination theory and Newton polytopes,
aparecerá en Funct. Anal. Other Math., e-print math/0611107, 34 pp.
[10] A. Marco y J.J. Martínez, Implicitization of rational surfaces by means of
polynomial interpolation, Comput. Aided Geom. Design 19 (2002), 327–344.
[11] P. McMullen, Mixed fibre polytopes, Discrete Comput. Geom. 32 (2004),
521–532.
[12] G. Mikhalkin, Tropical geometry and its applications, International Congress
of Mathematicians, vol. II, 827–852, Eur. Math. Soc., 2006.
[13] P. Philippon y M. Sombra, A refinement of the Bernštein-Kušnirenko estimate, aparecerá en Adv. Math., e-print arXiv:0709.3306, 45 pp.
[14] J.R. Sendra, F. Winkler y S. Pérez-Díaz, Rational Algebraic Curves. A
Computer Algebra Approach, Springer, 2008.
[15] B. Sturmfels y J. Tevelev, Elimination theory for tropical varieties, aparecerá en Math. Res. Let., e-print math/0704.3471, 19 pp.
[16] B. Sturmfels, J. Tevelev y J. Yu, The Newton polytope of the implicit
equation, Moscow Mathematical Journal 7 (2007), 327–346.
336
La Columna de Matemática Computacional
[17] B. Sturmfels y J. Yu, Tropical implicitization and mixed fiber polytopes,
aparecerá en M. Stillman, N. Takayama y J. Verschelde (eds.): Software for
Algebraic Geometry, I.M.A. Volumes in Math. Appl., e-print cs/0706.0564,
20 pp.
[18] B. Sturmfels y J. Yu, TrIm: a software for tropical implicitization, http:
//www-math.mit.edu/~jyu/TrIm/.
[19] Y. Sun y J. Yu, Implicitization of parametric curves via Lagrange interpolation, Computing 77 (2006), 379–386.
[20] J. Tevelev, Compactifications of subvarieties of tori, Amer. J. Math. 129
(2007), 1087–1104.
[21] R.J. Walker, Algebraic Curves, Princeton Univ. Press, 1950.
Carlos D’Andrea, Universidad de Barcelona, Departamento de Álgebra y Geometría,
Gran Vía 585, 08007 Barcelona
Correo electrónico: cdandrea@ub.edu
Página web: http://carlos.dandrea.name/
Martín Sombra, Universidad de Barcelona, Departamento de Álgebra y Geometría, Gran
Vía 585, 08007 Barcelona
Correo electrónico: sombra@ub.edu
Página web: http://atlas.mat.ub.es/personals/sombra/