n - Centro Herrera
Anuncio

BASES DE PROCESAMIENTO DIGITAL DE SEÑALES
DISEÑO DIRECTO DE FILTROS DIGITALES
Rabiner & Gold pp 263
En las secciones precedentes hemos visto discutido técnicas para digitalizar filtros
continuos. Un segundo método para diseñar filtros digitales de respuesta al impulso
infinito es el diseño digital directo, ya sea en el dominio de la frecuencia o en el dominio
del tiempo.
Entre las técnicas que caen en la categoría de diseño digital directo están los
métodos de diseños de la función magnitud al cuadrado (magnitud-squared function) y los
métodos en el dominio del tiempo. En lo que sigue describiremos brevemente esas
técnicas y discutiremos sus aplicabilidades.
Diseño de la Función Magnitud Cuadratizada
Sea H(z) la transformada z de un filtro IIR realizable arbitrario. H(z) es de la
forma:
m 1
H ( z)
b z
i
a z
1
i 0
n 1
i
(1)
i
i 0
La respuesta de magnitud cuadratizada del filtro es fácilmente evaluada como:
H e j
H z H z 1
2
z e j
(2)
y puede escribirse como:
H e j
2
m 1
m 1
i 0
n 1
k 0
n 1
bi e ji bk e jk
a e a e
ji
i
i 0
k 0
(3)
jk
k
o
m 1
He
j
2
c
i 0
n 1
d
i 0
i
i
cos i
cos k
(4)
donde c i y d i están relacionadas a bi y a i . Estas ecuaciones pueden también
reescribirse usando identidades trigonométricas de la forma:
m 1
H e j
2
e
i 0
m 1
f
i 0
i
cos 2 i / 2
i
cos i / 2
2
(5)
BASES DE PROCESAMIENTO DIGITAL DE SEÑALES
demostrando que la función magnitud cuadratizada puede siempre ser expresada como una
razón de dos funciones trigonométricas de .
La ecuación (5) forma la base de muchos métodos para la síntesis de filtros
digitales con las características de prescriptos de magnitud al cuadrado. La ecuación (5)
también relaciona a los filtros analógicos cuya función magnitud al cuadrado es una razón
de polinomios en 2 . Usando substitución (por ejemplo): cos la ecuación (5)
2
asume una forma apropiada a las funciones transferencia de filtros analógicos. La ec. (5)
puede ser simplificada a la forma
H e j
2
1
1 An2
(6)
donde An2 es un polinomio trigonométrico racional de n ésimo orden.
Mediante una elección adecuada de la función An2 , varios tipos de filtros
digitales pueden ser diseñados para aparear las características prescriptas de magnitud.
Para el caso de Butterworth la forma de An2 es:
tan 2 n / 2
A
tan 2 n 0 / 2
2
n
(7)
donde 0 es la frecuencia de corte del pasa bajos. Para el caso del polinomio de
Chebyshev la forma para An2 es:
2 tan / 2
An2 2 n
tan 0 / 2
(8)
donde n x es el polinomio de Chebyshev de n ésimo orden y es un parámetro de
ripple. Se puede demostrar que los filtros de Butterworth y Chebyshev digitales obtenidos
mediante la función magnitud al cuadrado están simplemente relacionados a la
transformación bilineal de los filtros Butterworth y Chebyshev continuos. Por tanto no se
hará una discusión más profunda de esa clase de filtros aquí.
El diseño de filtros IIR mediante la especificación de la función magnitud al
cuadrado es rápidamente extensible a muchas otras clases de filtros y no están restringidas
a los filtros pasa bajos. Las dificultades con esta técnica son las dos siguientes:
1º.- Se debe encontrar un polinomio trigonométrico racional adecuado para proveer el
filtro deseado.
j
2º .- La función magnitud al cuadrado H e
2
z e jT
debe ser factoreada para encontrar
los polos y los ceros. Esta factorización es generalmente no trivial y por consiguiente hace
a éste un método de diseño de filtros no deseado.
BASES DE PROCESAMIENTO DIGITAL DE SEÑALES
MÉTODO DIRECTO PARA EL DISEÑO DE FILTROS DIGITALES
A PARTIR DE LA FUNCIÓN MAGNITUD AL CUADRADO
Hemos visto que los filtros Butterworth y Chebyshev se especifican eligiendo
funciones magnitud al cuadrado selectivas adecuadas tales como en las ecuaciones
F ( j )
2
F ( j )
1
1 ( / c ) 2 n
Butterworth
1
2
(1)
Chebyshev
1 Vn2 ( / c )
2
(2)
Este mismo procedimiento es posible para filtros digitales y se describe en esta sección.
Habiendo establecido que la función sistema del filtro digital H(z) es una función
racional en z-1; se sigue que H(z) para z sobre el círculo unitario es una función racional de
ejω. Entonces, la magnitud al cuadrado |H(ejω)|2 puede expresarse siempre como la razón
de dos funciones trigonométricas de ωT. Un ejemplo de la función magnitud al cuadrado
adecuada para filtrado pasabajos es
2
H (e jT )
1
tg (T / 2)
1 2n
tg ( c T / 2)
2n
(3)
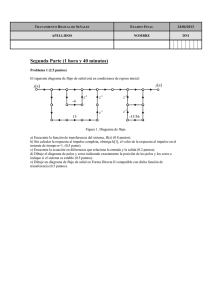
Esta ecuación se grafica en la Figura 1 para ωcT= π/2 para algunos valores de n.
Las curvas obtenidas son similares a las de Butterworth. La frecuencia de corte ωc juega el
mismo papel en ambos casos, el continuo y el digital.
Magnitud (dB)
0
Figura 1: Magnitud de los filtros digitales
de Butterworth para distintos valores de n
n=8
n=2
-80
ωc
ωT(radianes)
jω
Haciendo z = e , la expresión anterior puede escribirse
2
H ( z)
tg 2 n ( c T / 2)
tg 2 n ( c T / 2) ( 1) n z 1 / z 1
2n
(4)
Vemos que ésta es una función racional en z la cual tiene un cero de orden 2n en z = -1.
( z 1)
(5) en la anterior, para lo cual
( z 1)
podemos proponer que 2n polos de |H(p)|2 están uniformemente espaciados alrededor de
Los polos se encuentran substituyendo p
BASES DE PROCESAMIENTO DIGITAL DE SEÑALES
un círculo de radio tg ( c T / 2) en el plano p. Los polos en z son encontrados rápidamente
(1 p )
(6)
(1 p )
z = u + j v , encontramos de (6) la relación entre las
por la transformación inversa de la (5), esto es z
Haciendo p = x + j y
componentes:
u ( x, y )
y
1 x2 y2
v( x , y )
2y
(7)
1 x 2 y 2
y2
El círculo que contiene los polos en el plano p satisface la ecuación:
T
(8)
x 2 y 2 tg 2 c
2
De (7) y (8) podemos demostrar que el círculo mapea dentro de un círculo en el plano z,
centrado en (uc , vc) con radio ρ :
uc
1 x
1 tan 2 c T / 2
1 tan 2 c T / 2
2 tan c T / 2
1 tan 2 c T / 2
2
sec c T
vc 0
(9)
tan c T
Para valores impares de n, los 2n polos en el plano p tienen coordenadas x e y:
x m tan
cT
2
cos
m
;
n
y m tan
cT
2
sin
m
;
n
m = 0, 1, 2,..., 2n-1
(10)
Para valores pares de n, las coordenadas son:
x m tan
cT
2
cos
T
2m 1
2m 1
; y m tan c sin
; m = 0, 1, 2, ..., 2n-1 (11)
2n
2
2n
De las ecuaciones (10) (11) los polos correspondientes al plano z se calculan como:
um
vm
1 tan 2 c T / 2
1 2 tan c T / 2cosm / n tan 2 c T / 2
2 tan c T / 2sinm / n
con m = 0, 1, 2, ..., 2n-1 (12)
1 2 tan c T / 2cosm / n tan 2 c T / 2
Reemplazando mπ/n por (2m+1)π/2n se producen fórmulas equivalentes para n par.
1 tan 2 c T / 2
um
1 2 tan c T / 2 cos( 2m 1) / 2n tan 2 c T / 2
(13)
BASES DE PROCESAMIENTO DIGITAL DE SEÑALES
vm
2 tan c T / 2 sin( 2m 1) / 2n
1 2 tan c T / 2 cos( 2m 1) / 2n tan 2 c T / 2
Ejemplo: Encontrar los polos y ceros de una función magnitud al cuadrado de un filtro
pasa bajos con 3 dB de atenuación a 1250 Hz y con al menos 20 dB de atenuación a 2000
Hz. Hacer la velocidad de muestreo de 10000 Hz.
Solución: La frecuencia de corte de 1250Hz corresponde a ωT = 720
La función magnitud al cuadrado se hace:
H (e jT )
2
1
tan (T / 2)
1
tan 2 n ( / 8)
2n
El valor apropiado de n es n=4
(14)
El valor apropiado de n en la expresión (8) es n=4, obtenido haciendo ωT = 720 y
|H(ejωT)|2 igual a 0.01, satisfaciendo entonces la condición de atenuación de 20 dB.
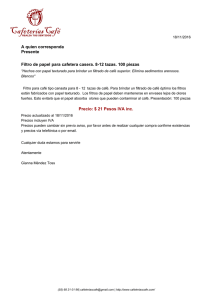
Los 8 polos en el plano p son encontrados a partir de las ecuaciones (12). Las
ecuaciones (13) pueden usarse ahora para encontrar los polos en el plano z, como se
muestra en la Figura 2; esta figura también muestra los 2n ceros localizados en z=-1, los
cuales son directamente derivables de la (5). La función magnitud al cuadrado es entonces
completamente satisfecha con las ubicaciones de los polos-ceros en el plano z.
[En el Apéndice de este capítulo, se hará un análisis de las relaciones necesarias entre una
supuesta función magnitud al cuadrado y el filtro digital especificado por aquella función].
Está demostrado que, a fin de que una función magnitud al cuadrado sea realizable,
cualquier polo dentro del círculo unitario (por ej., z4 en la Figura 2) debe estar apareado
con otro de magnitud inversa y del mismo ángulo, fuera del círculo unitario. Entonces, si:
z4 = r.ejψ, debe haber un polo (en este caso, z8) dado por (1/r) ejψ. Además, todos los polos
deben ocurrir en pares complejos conjugados. En consecuencia el filtro digital derivado de
la Figura 2 tiene los polos conjugados z4 , z5 y z3 , z6 .
Los anteriores argumentos obtenidos para los ceros también, incluyen el caso
especial de los ceros sobre el eje real. En la Figura 2, los ocho ceros ocurren para z = -1.
z
* z1
* z2
p
* z3
Cero de 8º orden →
-1
* z4
* z5
1
2ρ
1-ρ
* z6
* z7
1+ρ2
1-ρ2
ρ=tg ωcT/2
* z8
ωcT=π/4
ρ=0.4142
Figura 2: Polos y ceros de los filtros digitales Butterworth
BASES DE PROCESAMIENTO DIGITAL DE SEÑALES
Filtro Digital Pasa bajos Prototipo de Chebyshev
Si la función magnitud al cuadrado está dada por:
1
2
H (e jT )
tg 2 n (T / 2)
1 V 2 n
tg ( cT / 2)
2
(15)
2
n
( z 1)
yacen sobre una elipse en el plano p, que
( z 1)
tiene las mismas propiedades que la elipse de Chebyshev. Usando la notación dada para
los filtros Chebyshev y su respectiva elipse de ubicación de los polos, las componentes en
el plano z pueden escribirse
se puede demostrar que los polos de p
cT
cos
2
T
y b tan c sin
2
x a tan
(16)
con b y a (corresponden a los apexes vertical y horizontal ωca y ωcb) y están dados por:
1
a
2
b
1
2
2 1 1
2 1 1
1/ n
1/ n
2 1 1
2 1 1
1/ n
1/ n
Substituyendo en las ecuaciones (9) se produce:
um
21 a tan c T / 2cos
1 a tan cT / 2cos b 2 tan 2 cT / 2sin2
2b tan cT / 2sin
vm
1 a tan cT / 2cos 2 b 2 tan 2 cT / 2sin2
2
1
(17)
La figura 3 muestra el mapeo del plano z para a.tg(ωcT/2)=0.5 y b.tg(ωcT/2)=1. La elipse
de Chebyshev mapea dentro de la curva “cardioide” de la figura 3, y el círculo interno de la elipse
de Chebyshev mapea dentro del lado derecho del círculo de la figura 3. El círculo exterior de la
elipse de Chebyshev mapea dentro de un círculo de radio infinito, mostrado por la línea recta en la
figura 3. Los puntos mostrados sobre la elipse mapeada de la figura 3 son calculados a partir de las
ecuaciones (17).
BASES DE PROCESAMIENTO DIGITAL DE SEÑALES
Transformaciones Espectrales en el Diseño de Filtros Digitales
Se darán transformaciones que permitan convertir un sistema digital pasa bajos en otro
tipo de filtro, es decir otro pasa bajos, un pasa altos, un pasa banda o un eliminador de
banda.
Estas transformaciones fueron desarrolladas teóricamente por Constantinides [Ref.].
Hasta hace poco tiempo no se disponía de una solución al problema de
transformaciones espectrales en el diseño de filtros digitales, principalmente a causa de
que el método de síntesis de filtros digitales fue, hasta hace poco tiempo, un método
indirecto obtenido a través de filtros continuos. Por lo tanto no se hacía visible la
necesidad de transformaciones espectrales en el plano z.
Recientemente se dieron pasos hacia el procedimiento de síntesis directo para filtros
digitales, y en consecuencia se hizo más evidente la necesidad de transformaciones
espectrales en el plano z.
Constantinides desarrolló una teoría de estas transformaciones que veremos a
continuación.
Formulación del problema
Dada la función transferencia de pulsos G(z-1) de un filtro digital pasa bajos prototipo,
el cual tiene un determinado tipo de característica de amplitud, se quiere obtener una
transformación g(z-1) para la variable z-1 de G(z-1)
z-1 g(z-1) ==> G(z-1) G { g(z-1) }
de modo que G {g(z-1) } pasa a ser la función transferencia de otro tipo de filtro digital,
ya sea pasa bajos, pasa altos, pasa banda o eliminador de banda Además, se requiere que
el tipo de característica sea preservado después de la transformación.
Este problema es análogo al problema de síntesis de filtros continuos, donde para
convertir un pasa bajos a algún otro tipo de filtro se reemplaza la variable compleja de
frecuencia s por una función reactancia apropiada, pero el análisis en el caso de filtros
digitales es más complicado.
Los requerimientos para las transformaciones en el eje de frecuencias son similares a
las de filtros continuos con pequeñas modificaciones. En filtros continuos, el rango de
frecuencias apropiado se extiende sobre todo el eje de frecuencias, es decir -∞ < ω < +∞.
El rango equivalente en filtros digitales está comprendido entre los límites s , que es
2
la banda base de estos filtros.
Es importante destacar que este tipo de transformaciones no produce distorsión, como
en el caso de las transformaciones derivadas a partir de filtros continuos.
Los primeros pasos hacia el procedimiento de síntesis directo fueron dados por
Broome, pero los resultados obtenidos fueron bastante insatisfactorios, debido a que se
producía una distorsión en el eje de las frecuencias, que aparecía en las extremidades de la
imagen de G(z-1) centrada en ωo . Además estas transformaciones presentan restricciones
en su aplicación. Las transformaciones generales dadas por Constantinides, son superiores
a fórmulas de traslación de Broome, puesto que ellas no solamente no producen distorsión,
BASES DE PROCESAMIENTO DIGITAL DE SEÑALES
sino que son irrestringidas en su aplicación, ya sea para filtros digitales de banda ancha o
estrecha.
Las transformaciones espectrales poseen las siguientes importantes y útiles
caractrísticas:
Puesto que la aplicación de las transformaciones involucran una sustitución de z-1 en la
función transferencia de un filtro digital pasa bajos prototipo, por una función unitaria, se
sigue que la estructura del filtro digital pasa bajos permanece inalterada, o sea los
sumadores y multiplicadores son los mismos, y sólo una elemental función transferencia
extra, representante de la transformación, se inserta en lugar de z-1.
Con respecto a la clase de transformaciones requeridas, hacemos la siguiente
deducción: Puesto que g(z-1) va a reemplazar a la variable z-1, y puesto que la función
transferencia resultante va a ser real y racional, en z-1, y dado que la función transferencia
original G(z-1) es real y racional en z-1, se sigue que g(z-1) debe ser una función real y
racional en z-1.
Para consideraciones de estabilidad, los mapeos deben ser tales que las regiones de
estabilidad e inestabilidad se preservan; esto es, el interior de un círculo unitario debe
mapear el interior de un dominio Г, mientras que el exterior debe mapear el exterior del
dominio.
Para el dominio Г hacemos
g(z-1) = p(ω) ejФ(ω)
para
z-1 = e-jωT
donde p(ω) es la amplitud y Ф(ω) es la fase de g(z-1).
Si se desea preservar las regiones de estabilidad debe ser: para |z-1|< ó >1, |g(z-1)| < ó > 1
En consecuencia p(ω)=1. Esto quiere decir que el círculo unitario es mapeado sobre sí
mismo.
En vista de las condiciones anteriores, se sigue que g(z-1) debe estar dada por una función
de la forma
z 1 i
, donde |αi|<1, y αi*es el complejo conjugado de αi
* 1
i 1 1 i z
n
g ( z 1 ) e j
Estas funciones son llamadas “funciones unitarias”, y tienen la característica de presentar
una respuesta en amplitud constante e igual a la unidad, mientras que lo que varía es la
fase, lo cual producirá la transformación que necesitamos.
A
1
ωT
BASES DE PROCESAMIENTO DIGITAL DE SEÑALES
Transformaciones Espectrales en el Dominio Digital
Transformación Pasa bajos – Pasa bajos (LP-LP):
Esta transformación se requiere, para mantener la característica de amplitud como la del
prototipo pasa bajos entre 0 y Ωs/2, pero con la banda pasante estrechada o ensanchada
para resultar en una frecuencia de corte diferente.
Es obvio que dicha transformación no es lineal para la frecuencia ω, como es el caso para
la transformación pasa bajos – pasa bajos para filtros continuos, donde s es reemplazado
por Ks (K≥0 y cte.).
El mapeo estará dado por z-1 → g(z-1), donde
z 1
,
g( z )
1 z 1
1
donde |α| < 1 y real
La frecuencia de corte del filtro digital pasa bajos prototipo será β(rad/seg), y la del
filtro digital resultante será ωc (rad/seg). Entonces valdrá la siguiente expresión:
e
j cT
e jT
,
1 e jT
sin
de donde obtenemos α:
sin
c
2
c
2
T
T
Cuando α es negativo (esto es ωc<β) la banda resulta estrechada; y para un α positivo
(ωc<β) la banda resulta ensanchada.
Transformación Pasa bajos – Pasa altos (LP-HP):
Dada la función transferencia G(z-1) de un filtro digital pasa bajos de frecuencia
angular de corte β, la función transferencia de un filtro digital pasa altos que tiene el
mismo tipo de característica de amplitud que G(z-1) y frecuencia angular de corte ωc, se
obtiene reemplazando la variable z-1 de G(z-1) por la función unitaria:
z
1
z 1
,
g( z )
1 z 1
1
cos
donde α está dado por la ecuación:
cos
c
2
c
2
T
T
siendo β la frecuencia de corte del filtro digital pasa bajos prototipo, y ωc la frecuencia
angular de corte del filtro digital pasa altos deseado.
Transformación Pasa bajos – Pasa banda (LP-BP):
Dada la función transferencia de pulsos G(z-1) de un filtro digital pasa bajos
prototipo de frecuencia angular de corte β, la función transferencia de un filtro digital pasa
banda que tenga el mismo tipo de característica de amplitud que G(z-1), frecuencia central
ωo, y frecuencias de corte superior e inferior ω1 y ω2 , se obtiene substituyendo z-1 de
G(z-1) por la función unitaria:
z 1
K 1
K
2
z 1 z 2
K 1
g ( z 1 ) K 1
, (I) en donde
K
K 1 2
1
1 2
z
z
K 1
K 1
BASES DE PROCESAMIENTO DIGITAL DE SEÑALES
2
cos 1
T
1
2
(II) y K cot 2
cos oT
2
1
cos 2
T
2
T
T . tan
(III)
2
La transformación dada por la ecuación (I) puede tomar diferentes formas, dependiendo de
los valores de α y K.
a)
En particular, si K = 1,
y de la (III) con K = 1 tenemos
z 1 z 1
,
1 z 1
2 1 (IV)
z 1 g ( z 1 )
La transformación dada por la (IV) está restringida en su aplicación porque
tenemos que usar un filtro pasa bajos de una frecuencia de corte particular β dada
en la ecuación (V).
b)
Otra forma que la transformación puede tomar , corresponde al caso cuando α = 0
y K = 1. Esta forma es particularmente importante, puesto que el filtro digital pasa
banda tiene una característica de amplitud que es simétrica aritméticamente
respecto a la frecuencia central. En este caso:
z 1 z 2
y además
1
s
; 2 s ; o s
4
2
4
2
4
Transformación Pasa bajos – Eliminador de banda (LP-SP):
Dada la función transferencia de pulsos G(z-1) de un filtro digital pasa bajos
prototipo de frecuencia de corte β, la función transferencia de un filtro digital eliminador
de banda que tiene el mismo tipo de característica de amplitud que G(z-1), frecuencia
central ωo, y frecuencias superior e inferior de corte ω1 y ω2 , estará dada por el reemplazo
z-1 de G(z-1) por la función unitaria de ecuación:
z 1
1 K
1 2
2
z z
1
1
K
1
K
g( z )
, (VI)
1 K 2
1
1 2
z
z
1 K
1 K
cos 2
cos oT
cos 2
donde α está dada por:
1
T
1
T
2
(VII), y K es: K tan
(VIII)
2
T . tan
2
2
1
T
2
La transformación (VI) también presenta dos formas restringidas:
BASES DE PROCESAMIENTO DIGITAL DE SEÑALES
1
1
a) Cuando K = 1, tenemos: z g ( z )
queda: 2 1
z 1 z 1
, (IX) y la ec. (VIII)
1 z 1
s
, (X)
2
donde Ωs = 2πfs es la frecuencia angular de muestreo.
b) Cuando K = 1 y α = 0, se tiene el caso de un eliminador de banda
aritmétricamente simétrico respecto a la frecuencia central ωo. Entonces:
z 1 z 2
1
con
2
; 2
s
; o s
2
2
4
Conclusiones:
Dado que la transformación espectral para filtros digitales implica reemplazar la
variable z-1 por una función g(z-1), esto significa que cada retardo z-1 en la realización de la
función transferencia del filtro digital prototipo, es reemplazado por una función
transferencia g(z-1), dando origen a la realización del filtro digital que se desea obtener.
Ejemplo: Dado un filtro digital de segundo orden, por ejemplo, cuya configuración
canónica es:
uk
a2
+
a1
z1
b2
ao
vk
+
z1
+
b1
Supongamos que sea el pasa bajos prototipo, y que queremos obtener otro pasa bajos.
z 1
Entonces, reemplazamos z por
1 z 1
-1
-α
1
α1
z-
+
1
+
-α
Y ( z 1 )
z 1
Y (1 z 1 ) X ( z 1 )
X ( z 1 ) 1 z 1
Antitransf ormando :
H ( z 1 )
y( k ) y( K 1) x( K 1) x( k )
y( k ) x( K ) x( K 1) y( K 1)
BASES DE PROCESAMIENTO DIGITAL DE SEÑALES
uk
a2
a1
ao
vk
g(z-1)
+
+
g(z-1)
+
b1
b2
uk
a2
a1
ao
vk
+
+
+α
b2
α
+1
+
+α
b1 α
+1