Desarrollo de un Equipo para el Registro de Variables
Anuncio

Desarrollo de un Equipo para el Registro de Variables
Biomecánicas Mediante Ultrasonido
Ariel Braidot, Matías Bisheimer y Jimena Di Paolo
Facultad de Ingeniería-UNER, abraidot@bioingenieria.edu.ar, 0343-4975077, Ruta 11 Km 10
Oro Verde.
Resumen— La biomecánica describe, analiza
y evalúa el movimiento humano. Este
movimiento incluye secuencias complejas de
actividad muscular que difícilmente se
captan y/o comprenden sin información
adicional de un sistema objetivo de registro.
El entendimiento claro de las desviaciones de
los patrones normales es crucial para poder
brindar un correcto análisis clínico del
movimiento humano. En los últimos tiempos
se ha difundido en el ámbito clínico
hospitalario el uso de herramientas de
análisis biomecánico.
Para un análisis completo y preciso del
movimiento suelen requerirse un gran
número de datos. La obtención de estos datos
que cuantifican los movimientos humanos se
realiza mediante diferentes técnicas. Entre
las que se pueden mencionar: Videografía,
Goniometría, Equipos de ultrasonido y
Acelerometría.
Durante los últimos años, la tecnología
ultrasónica se ha desarrollado a tal punto,
que los
ultrasonidos
se consideran
actualmente una rama importante de la
física, con aplicaciones tan diversas y en
diferentes disciplinas como la medicina,
electrónica y mecánica.
Es importante destacar que la mayor parte
de los equipos de registro tienen costos
elevados. Atendiendo a nuestra realidad
hospitalaria y optimizando los avances
tecnológicos
que
permiten
utilizar
transductores
(emisores-receptores)
de
ultrasonido, se desarrolló un equipo
empleando microcontroladores capaz de
registrar las variables cinemáticas 3D en
tiempo real y visualizarlas en una PC. El
equipo incluye también un software de alto
nivel para la interface con el usuario. Es
interesante destacar que el equipo funciona a
nivel de prototipo. En las pruebas realizadas
se pudo registrar movimientos simples,
requiriéndose una mayor labor para hacer
robusto al sistema. En este marco se puede
mencionar que el costo de inversión de un
equipo
de
estas
características
es
significativamente inferior al de los equipos
comerciales de videografía.
Palabras clave— Cinemática,
Movimiento humano.
Ultrasonido,
I Introducción
El estudio de la marcha humana ha interesado
desde tiempos remotos y los métodos para su
evaluación han avanzado enormemente. Se han
perfeccionado y simplificado las técnicas para
su análisis a la vez que se han desarrollado
nuevos métodos que permiten valorar los
distintos parámetros de la marcha humana de
forma objetiva y eficaz. Asimismo se han
evaluado los factores que pueden modificar el
patrón de marcha en diversas patologías y
lesiones traumáticas. También se han realizado
seguimientos de pacientes para observar la
evolución de patologías, valorando la
efectividad de la tratamiento y/o evaluando la
recuperación tras una intervención quirúrgica.
El estudio de la marcha humana ha sido motivo
de estudio desde tiempos remotos. En la
antigüedad el hombre sólo disponía de su
capacidad de observación. En el último siglo el
desarrollo de las técnicas de análisis de la
marcha ha experimentado su mayor desarrollo
[1], principalmente desde la introducción de
programas informáticos que proporcionan datos
numéricos y gráficos y que permiten la
realización de un estudio objetivo y completo de
la marcha normal y patológica [8, 9], como así
también de los factores que pueden modificarla
[4, 5]. Un dispositivo de registro cinemático en
tres dimensiones tiene múltiples aplicaciones en
estudios
biomecánicos,
neurología,
rehabilitación, fabricación de calzado o campo
deportivo.
En este contexto, se destaca la importancia del
desarrollo de un equipo destinado a la
adquisición de datos cinemáticos del
movimiento humano en 3 dimensiones [3], con
la posibilidad de un registro y evaluación on
line como es el caso de un sistema de
ultrasonido empleado en este trabajo. Muy
pocos equipos de estas características han sido
elaborados y aun no poseen todas las
especificaciones deseables [10]. El objetivo en
este trabajo es aportar esfuerzos para lograr, en
un futuro, contar con equipamientos (acordes a
nuestra realidad económica) en distintos centros
de salud, y de esta manera convertir el estudio
de la marcha en una práctica común de la
clínica.
II Desarrollo
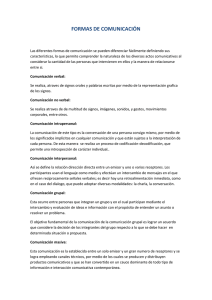
Los sistemas de registro cinemático del
movimiento humano por ultrasonido constan de
un marco de referencia Fijo donde se montan
tres o más receptores de ultrasonido (Figura 1) y
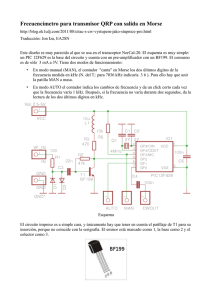
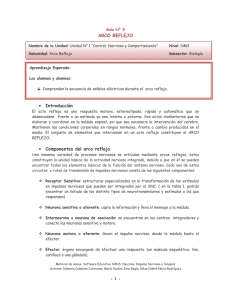
sobre el individuo en estudio se colocan
emisores ultrasónicos en los puntos anatómicos
de interés (Figura 2), para luego estimularlos de
manera secuencial. Se deben emitir un número
de ondas de forma que se puede registrar el
tiempo transcurrido desde que el frente de ondas
es generado en los emisores hasta que se recibe
en los receptores. Con esta información es
posible calcular la distancia a la que se
encuentra el emisor con respecto al receptor. Si
se desea realizar la localización 3D de los
marcadores se debe contar por lo menos con 3
receptores ultrasónicos (Figura 1). En este
trabajo se emplean 5 pulsos (ondas) que
optimizan al máximo la capacidad de los
emisores ultrasónicos de transferir la energía al
medio [2].
El hecho de que la velocidad del sonido en el
aire es de aproximadamente 344 m/s lleva a que
exista una limitación en el volumen de estudio y
en la frecuencia de muestreo. Si se considera
por ejemplo un volumen activo de 3m x 3m x
3m, adecuado para el estudio de marcha de uno
o dos pasos se puede llegar a una frecuencia de
10 [Hz] para ocho marcadores con una única
frecuencia [1]. Este inconveniente se superó
desarrollando un prototipo que emplea más de
una
frecuencia
ultrasónica
emitida
simultáneamente.
Figura 1: Distribución receptores ultrasónicos. Tres
receptores en cada bloque.
Figura 2: Distribución de las marcas en el cuerpo.
Se seleccionaron las frecuencias de 25, 32,8 y
40 KHz de emisores-receptores ultrasónicos
disponibles en el mercado internacional a un
costo razonable. Resultando la distribución de
emisores presentada en la Figura 2, y detallada:
- Epicóndilo lateral corresponde a la marca 1 de 25 Khz.
- Trocanter mayor corresponde a la marca 2 de 32,8 Khz.
- Metatárso corresponde a la marca 3 de 40 Khz.
- Maléolo lateral corresponde a la marca 4 de 25 Khz.
- Base de las costillas corresponde a la marca 5 de 32,8 Khz.
- Espina corresponde a la marca 6 de 40 Khz.
- Talón corresponde a la marca 7 de 32,8 Khz.
- Cabeza del peroné corresponde a la marca 8 de 40 Khz.
Disparando simultáneamente los marcadores 1,
2 y 3 en primer término (grupo 1); los
marcadores 4, 5 y 6 en segundo término (grupo
2) y finalmente los marcadores 7 y 8 (grupo 3)
se alcanza un frecuencia de disparo del mismo
marcador de 40 Hz.
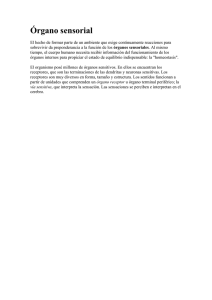
Módulo de acondicionamiento de la señal
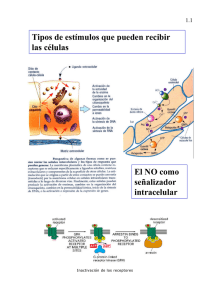
La señal ultrasónica proveniente de los
marcadores (emisores) posee una forma
característica de un frente de onda de una señal
de ultrasonido como se observa en la Figura 3.
Esta señal debía utilizarse para determinar el
tiempo transcurrido desde la emisión hasta la
recepción de los pulsos. Un método simple
consiste en comparar la señal con un nivel de
voltaje continuo, pero la forma de este eco no
permitía el cruce exacto de la señal con el
voltaje de comparación, introduciendo ruido en
la información registrada.
Figura 3: Señal amplificada de los receptores ultrasónicos.
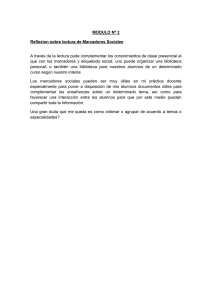
Antes de introducir esta señal a una etapa de
comparación se realizó un procesamiento
analógico por medio de una etapa de
rectificación y suavizado. Este procesamiento
resulto insuficiente requiriéndose una etapa la
integración de cada una de las nueve señales
ultrasónicas provenientes de los receptores (ver
circuito Figura 4).
Figura 4: Detalle del circuito que realiza la integración de la
señal.
El diagrama en bloques de una de las nueve
etapas acondicionadoras se presenta en la Figura
5
Figura 5: Diagrama en bloques de la etapa de acondicionamiento de la señal recibida en cada emisor.
El sistema de recepción esta diseñado en base a
tres microcontroladores PIC 18F242. Cada
microcontrolador PIC tiene la tarea de realizar
los conteos de los tiempos relacionados con
cada uno de los tres receptores de una misma
frecuencia ultrasónica. Esta tarea la lleva a cabo
mediante el uso de los dos módulos CCP del
PIC utilizados en modo captura y de una
interrupción externa cuya rutina asociada
detiene el tercer contador y es la encargada de
guardar el tiempo. Estos microcontroladores
también codifican los datos y los envían a la PC
por medio de un circuito MAX232 el cual
adapta los niveles de voltaje para respetar el
protocolo de transmisión del puerto serie de la
PC. Uno de los PIC's diseñado como maestro,
tiene la función de sincronizar y controlar la
base de tiempos entre el sistema de detección
con el sistema de emisión. También inicia y
termina el registro de datos cuando recibe
órdenes impartidas desde la PC y es el que
maneja el orden en que se envían los datos a la
PC para que no haya solapamiento entre los
datos de los tres PIC's durante la transmisión.
Este ordenamiento lo lleva a cabo mediante
pedidos de envío a los otros microcontroladores
y avisos de reconocimiento de pedido y
actualización de transmisión hacia y desde los
otros microcontroladores (handshaking).
Adquisición de datos
La adquisición de los datos, como así también la
finalización de la adquisición, se controlan
mediante al envío desde la PC de un código de
inicio y otro de finalización. Esta adquisición de
datos se realiza por el puerto serial a una
velocidad de 115.200 Kbauds y son recibidos de
a paquetes de 27 bytes cada uno más un byte de
inicio y un byte de finalización. Estos paquetes
contienen los datos codificados de los conteos
correspondientes a los tiempos de vuelo de las
señales desde los emisores hasta los receptores
de un grupo (es decir de tres marcas de
diferentes frecuencias). Cada paquete de datos
es recibido a una frecuencia de 120 Hz. Como
cada paquete contiene a un grupo de emisores, y
el número de grupos es de tres, la frecuencia de
muestreo de cada marca es de 40 Hz.
Triangulación en 3 dimensiones
Figura 6: Diagrama esquemático de la disposición de los
sensores para realizar la triangulación..
III Resultados y discusiones
Existen varios métodos [6,7] para estimar la
posición de un punto de interés en el espacio
donde se encuentra un emisor en un instante se
deben resolver las ecuaciones de la intersección
de tres esferas (Ver Figura 6 a y b),
( X + X 0 )2 + (Y − Y1 )2 + Z 2 = a 2
( X − X 0 )2 + (Y − Y1 )2 + Z 2 = b2
X 2 + (Y − Y0 )2 + Z 2 = c 2
(1)
(2)
Se realizaron pruebas iniciales del prototipo
registrando movimientos suaves de los
marcadores, por ejemplo en una trayectoria en
el mismo sentido que se realizaría la caminata
frente al dispositivo de un marcador ubicado en
el trocánter mayor. Los registros que se
obtuvieron en esta instancia se muestran en las
Figuras 7 a, b y c.
(3)
donde X 0 , Y0 y Y1 son las distancia existentes
entre los receptores y el origen de coordenadas
como lo muestra la Figura 6b en donde a, b y c
son las distancias lineales que existen entre el
punto de interés (emisor) y los receptores a, b y
c respectivamente. La posición del emisor irá
cambiando
con
el
movimiento
y
consecuentemente cambiarán las distancias a, b
y c. Resolviendo el sistema se encuentra:
X =
Y=
Z=
(a
2
− b2
4X0
(0,5 ⋅ b
{c
2
2
)
(4)
)
− c 2 + 0,5 ⋅ a 2 − X 02 − Y12 + Y02
(5)
2 ⋅ (Y1 − Y0 )
− X 2 − (Y − Y0 )2
}
Figura 7a: Coordenada x en función del tiempo del
marcador de la cadera para una pasada frente al dispositivo.
(6)
Con este método de triangulación se puede
obtener la posición en el espacio de un punto de
interés. Para nuestro caso particular se podrán
conocer las posiciones de los marcadores
ultrasónicos situados en puntos anatómicos
específicos. A partir de estos datos de
posiciones
se
determinan
velocidades,
aceleraciones y ángulos relativos entre
segmentos del cuerpo.
Figura 7b: Coordenada y en función del tiempo del
marcador de la cadera para una pasada frente al dispositivo.
Figura 7c: Coordenada z en función del tiempo del marcador
de la cadera para una pasada frente al dispositivo.
Se debe mencionar que la dirección principal
del movimiento realizado es en el eje X, pero no
significa que no haya movimientos, de menor
magnitud, en los otros dos ejes. Los resultados
aquí obtenidos fueron satisfactorios, ya que
éstos reflejaban los movimientos que
realizábamos con los marcadores. No obstante,
no descartamos la presencia de falsos
movimientos por causa de algunos datos
lineales perdidos, los cuales podrían ser los
responsables de la presencia de saltos en los
valores de lo datos registrados. Considerando
que ambos, emisor y receptor, tienen un lóbulo
de emisión-recepción limitado los datos lineales
podrían haberse perdido en aquellos momentos
en los cuales el emisor y los receptores no están
enfrentados.
En este contexto, se puede proponer a futuro
como alternativa de solución un método que
analice los posibles datos perdidos y en base al
dato anterior y posterior del punto no registrado,
elabore un valor que reemplace de manera
correcta el dato ausente.
V Bibliografía
[1] Braidot, A., Cian, L., Cherniz, A. Gallardo, D., Spinetto, J.I.,
Desarrollo de un Sistema de Videografía Digital para Análisis de la
Marcha. II Congreso Latinoamericano de Ingeniería Biomédica, La
Habana, Cuba. 2001.
[2] S. Gwirc, F. Ferdeghini, A. Comastri y D. Lupique Sensores
ultrasónicos: Respuesta a distintas formas de onda de emisión.
Centro de Investigación y Desarrollo en Electrónica e Informática
(CITEI), INTI, CC 157 (1650) San Martín, Buenos Aires Argentina,
2002.
[3] Christopher L. Vaughan and Brian L Davis and Jeremy C.
OConnor. Dinamics of human gait. 1992.
[4] Collado Vázquez Susana. Análisis de la marcha humana con
plataformas dinamométricas. Tesis doctoral, Facultad de medicina de
la Universidad Complutense - Madrid, 2004.
[5] Collado Vázquez Susana. La marcha:historia de los
procedimientos de análisis. Biociencias. Facultad de ciencias de la
salud, 2, Abril 2004.
[6] Dimitris E. Manolakis. Efficient solution and performance
analysis of 3-d position estimation by trilateration. IEEEtransactions on aerospace and electronic systems, 32(4) 1239-1348,
1996.
[7] Federico Thomas and Lluis Ros. Revisting trilateration for robot
localization. IEEE-transactions on robotics, 21 (1), 93-101, 2005.
[8] Whittle M.W. Gait Analysis. An Introduction. 1996.
[9] Winter D.A. Biomechanics and Motor Control of Human
Movement. 1990.
[10] Zebris Medical. The world of biomechanics. www.zebris.de,
Germany, Agosto 2004.