Clutter
Anuncio

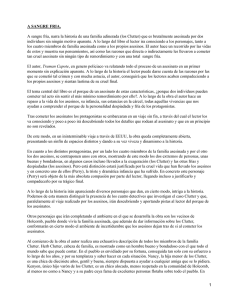
TEMA V CONTAMINACIÓN RADAR: CLUTTER Clutter 5.1.- INTRODUCCIÓN. • Conjunto de ecos que no se desean detectar. • Constituye uno de los problemas más importantes con que se enfrenta el diseñador de un radar. ⇓ Multitud de técnicas y circuitos para su eliminación Efecto del clutter sobre el PPI de un radar de Control de Tráfico Aéreo en banda S 2 Clutter • Atendiendo a su origen, el clutter puede clasificarse en: 1.- Clutter puntual: ángeles (pájaros e insectos). suelo (edificios, torres, chimeneas). 2.- Clutter superficial: suelo (superficie terrestre). mar. 3.- Clutter volumétrico: meteorológico (lluvia, nieve). “chaff”. • En algunos radares muy especializados, p.e., meteorológicos o marinos, tienen interés los ecos procedentes de las nubes, costa u obstáculos. R. Meteorológico R. Navegación marítima 3 Clutter 5.2.- CARACTERIZACIÓN DEL CLUTTER. • Como cualquier blanco, se caracteriza por la sección radar equivalente σA que depende de numerosos factores: - Longitud de onda de trabajo. - Polarización. - Forma y ancho del lóbulo principal de la antena. - Ángulo de iluminación. • Desde el punto de vista de la caracterización: 1.- Clutter discreto o puntual: retrodispersión desde cualquier objeto aislado físicamente sobre la superficie. Ej: edificios, torres, etc ..., su RCS ↑↑. 2.- Clutter distribuido: señales radar retrodispersadas desde una distribución continua de dispersores sin la presencia de dispersores dominantes. Ej: mar, lluvia. n σ = ∑ (σ i )1/ 2 · e j (φ i =1 4 ·π · d i φi = λ i ) 4 2 Clutter • Típicamente se normaliza el clutter retrodispersado al área (clutter superficial) o al volumen (clutter volumétrico) que es iluminado por el radar. • Clutter superficial: reflectividad radar por unidad de área iluminada. o σ= σ c A c donde σc es la sección radar del clutter en el área Ac. • Clutter volumétrico: reflectividad radar por unidad de volumen iluminado. η= σc Vc donde σc, en este caso, es la sección radar del volumen Vc. o • σ y η son coeficientes de reflectividad independientes del radar ⇒ miden la RCS de la celda de resolución iluminada. 5 Clutter • El clutter, al igual que los blancos, se modela mediante un proceso estocástico (aleatorio) estacionario caracterizado por: - Una función densidad de probabilidad en amplitud: porcentaje de tiempo durante el cual las reflexiones tienen un rango determinado de valores. - Densidad espectral de potencia: nos proporciona información de la velocidad de variación de los valores. ■ Análisis breve de: • Clutter superficial: - Clutter de tierra - Clutter de mar • Clutter volumétrico: - Clutter de lluvia 6 Clutter 5.3.- CLUTTER SUPERFICIAL. Geometría del clutter superficial: θB Radar R φ θB 2 R.tg ( c Tierra Plana Tp 2 2 ) sec φ • Área de la superficie dentro de cada celda de resolución: Ac = Rθ cTp Secφ B 2 o Ej: Radar sobre la superficie en Banda S (ARS-9) Parámetro Valor Ancho del pulso, Tp Ancho haz acimut, θB Distancia del clutter (mn) Ángulo de rozamiento, φ 1.05 µs 1.3º 10 1º ⇒ Ac = 6.6 * 104 (m2) ⇓ Tipo de clutter Bosques Desierto Mar Valor σ0 (dB) Valor σc (m2) -30 -45 -50 66 2 0.66 7 Clutter ⇒ Potencia recibida desde el clutter: Pt Gt Arσ c Pt Gt Arσ ºθ B cTp / 2 Secφ = C= 2 2 4π R 4 4π R 3 ⇒ Relación Señal / Clutter es: σt S= C σ º Rθ cTp Secφ B 2 ⇒ La máxima distancia limitada por clutter es: R max = σt S / C min σ ºθ cTp B 2 • El coeficiente de retrodispersión para clutter superficial depende de numerosos factores: longitud de onda, polarización, ángulo de incidencia ..., y muy especialmente de: Clutter de tierra: diferentes tipos de terrenos. Clutter de mar: diferentes estados del mar. ⇓ σo 8 Clutter • Ángulos utilizados al describir la geometría del radar y clutter superficial. θ Ángulo de depresión Ángulo de incidencia γ Radar Ángulo de rozamiento φ Ángulo de incidencia (γ): Es el ángulo entre la LOS del radar y la normal a la superficie. Ángulo de depresión (θ): Es el ángulo entre la LOS del radar respecto a la horizontal. Ángulo de rozamiento (φ): Es el ángulo entre la LOS del Radar y la tangente a la superficie. Cuando la tierra se considera plana: θ = φ 9 Clutter 5.3.1.- CLUTTER DE TIERRA. • Aproximación general para describir el clutter de tierra consiste en exponer sus propiedades en términos de: 1.- Coeficiente de retrodispersión promedio ( σ º ). 2.- Función densidad de probabilidad en amplitud. 3.- Densidad espectral de potencia o la función de autocorrelación. 4.- Distribución espacial: debido a la variabilidad espacial del clutter de tierra (prevalece en este tipo de clutter). Promediado de σ º para diferentes tipos de terreno. 10 Clutter • Ejemplo de simulación de diferentes tipos de terrenos y obtención gráfica de la relación C/S. Descripción de parámetros de simulación del clutter de tierra- 2 terrenos -. • Distribución espacial: o El concepto de σº asume que el clutter es una cantidad uniforme desde un punto de vista espacial. ⇓ “Clutter varía significativamente desde un punto a otro punto”. o Una medida de la distribución espacial es considerar σº como una variable aleatoria. ⇓ Función de distribución ⇒ valores de σº que puedan ser encontrados en celdas espaciales independientes. 11 Clutter o Modelado: distribución de probabilidad de Weibull: P (σ ) = b σσ b +1 m exp − σ b / a σ b donde a = m , tiene un parámetro de ajuste b en función del tipo de Ln 2 terreno. • Función Densidad de Probabilidad en amplitud: o Clutter distribuido: gran número de dispersores aleatorios discretos y la distancia d aparente entre estos dispersores puede cambiar debido a: - Movimiento físico de los dispersores individuales debido al viento (árboles, ...) - Movimiento de la plataforma radar o de la antena (cambia el ángulo de aspecto de cada dispersor) ⇓ Esta fluctuación temporal puede ser descrita en términos de la Función de Distribución de Probabilidad en Amplitud. o Modelado: Función densidad de probabilidad gaussiana. P( σ ) = 1 2 πσ c 2 exp −σ2 2σ c 2 12 Clutter • Espectro de frecuencia del clutter de tierra: o El espectro de frecuencia del clutter de tierra puede ser expresado como la densidad espectral de potencia o la función de autocorrelación. ∞ P ( f ) = ∫ R (τ ) e j 2π f τ d τ −∞ donde: P(f) valor de la función densidad espectral de potencia en f. R(τ) valor de la autocorelación en τ. o El espectro intrínseco del clutter de tierra es consecuencia del movimiento relativo de los dispersores debido al viento, ensanchándose al incrementarse la velocidad del viento. ⇓ 13 Clutter o Modelado: Tradicionalmente: espectro gaussiano. S( f ) = 1 2πσ f 2 [ exp − f 2 / 2 σ f 2 ] donde: σf = 2·σv /λ σv : desviación típica de la anchura de velocidad del clutter Estudios más recientes sugieren una función densidad espectral cúbica: S( f ) = 1 1+ f / f c 3 donde fc es la frecuencia de corte a 3dB proporcional a la velocidad del viento, dada por, f c = 1 .33 exp (0 .1356 V w ) donde Vw es la velocidad del viento en nudos. 14 Clutter • Ejemplo: simulación de densidades espectrales. 15 Clutter 5.3.2.- CLUTTER DE MAR. • El clutter de mar se diferencia del clutter de tierra en dos aspectos: - Las variaciones temporales tienden a ser mayores en amplitud. - Las variaciones espaciales tienden a ser menos significativas. • La reflectividad del mar sería virtualmente inexistente si no fuera por los efectos de las olas generadas por el viento. • La magnitud de la retrodispersión está relacionada con la altura de las olas: Estado del mar. ⇓ Estado del mar 1 2 3 4 5 6 7 Descripción Suave Ligero Moderado Rugoso Muy rugoso Alto Muy alto Altura de las olas (h1/3 ft) 0-1 1-3 3-5 5-8 8-12 12-20 20-40 Velocidad del viento aproximada (nudos) 0-6 6-12 12-15 15-20 20-25 25-30 30-50 • El clutter de mar depende de parámetros del radar tales como: frecuencia, polarización, ... y de otros parámetros como la altura de las olas y velocidad del viento. Promediado de σo para diferentes estados del mar. 16 Clutter • Función densidad de probabilidad en amplitud: o La amplitud del clutter de mar fluctúa de una forma estadística, que puede ser caracterizada en términos de la función densidad de probabilidad. o Modelado: Inicialmente las variaciones en amplitud seguían una distribución tipo Rayleigh: v2 v − p(v) = 2 e 2σ σ 2 aplicada cuando la celda de resolución o el tamaño del área de océano iluminada por el radar es grande comparado con la estructura de las olas. La función densidad de probabilidad lognormal es utilizada para modelar en los casos de radares de alta resolución y en los estados del mar elevados. 17 Clutter • Espectro de frecuencia del clutter de mar: o El espectro del clutter de mar difiere del clutter de tierra en un aspecto fundamental: “El movimiento relativo de la superficie del mar con respecto al radar, causa un desplazamiento de frecuencia doppler de la señal reflejada desde los dispersores individuales”. (máximo del espectro a una frecuencia diferente de cero (f ≠ 0)) o Este desplazamiento doppler medio es dado por: fdm = 2·Vw / λ donde Vw es la velocidad radial promedio de las olas con respecto al radar. o El espectro del clutter se considera que tiene forma gaussiana: el ancho espectral está caracterizado por su desviación estándar σf : σv = σf · λ/2 que varía con la agitación de la superficie del mar, ensanchándose al incrementarse el estado del mar. 18 Clutter 5.4.- CLUTTER ATMOSFÉRICO. • Un atributo importante de un radar es su habilidad para funcionar en todas las condiciones meteorológicas a largas distancias: ⇓ Fo↑ ⇒ Reflexión por precipitación ↑ Geometría del clutter volumétrico: φB φB R 2 θBR c Tp 2 2 Radar ⇒ Volumen de la celda de resolución: Vc = π θ φ R 2 cTp 8 B B 2 V ⇒ Potencia recibida desde el clutter: Pt Gt Gr λ2σ c Pt Gt Gr λ2ηθ BφBcTp C= = 3 1024π 2 R 2 4π R 4 ⇒ Relación C/S será: ηθ φ R 2Tp c 2 C/S = B B σt 19 Clutter 5.4.1- CLUTTER DE LLUVIA. • Las propiedades de retrodispersión de la lluvia dependen de la frecuencia transmitida, polarización y número y tamaño de las gotas de lluvia. Velocidad Diámetro(nm) λ (m) η (m2/m3) Débil (0-1mm/hr) 10-20 0.107 ≅10-10 Moderada (4mm/hr) 30-50 0.107 ≅10-9 Fuerte (16mm/hr) 20 0.107 ≅ 10-7 Intensa (50mm/hr) 2 0.107 ≅ 10-5 20 Clutter • Ejemplo de simulación de clutter de lluvia: Descripción de parámetros de simulación del clutter de lluvia. • Función densidad de probabilidad en amplitud: o La retrodispersión desde el clutter de lluvia es el resultado del efecto acumulativo de un gran número de dispersores (gotas de lluvia) ⇓ Función densidad de probabilidad gaussiana o Otras medidas experimentales (X → mm ) : modelado con una lognormal. 21 Clutter • Espectro del clutter de lluvia. o El movimiento relativo de los dispersores dentro de la celda de resolución produce una frecuencia doppler media y un ancho espectral en función de la extensión de velocidad. AVr 0.5 Vr2 Vr0 Vr1 Velocidad doppler Espectro de velocidad o Modelado: Densidad espectral cúbica. 22 Clutter 5.5.- DIAGRAMA TÍPICO DEL ENTORNO DE UN RADAR. Diagrama del entorno típico: Niveles de potencia recibidos: Representación alternativa: 23 Clutter 5.6.- SISTEMAS ANTICLUTTER. o Multitud de dispositivos y sistemas con el objetivo de reducir los efectos del clutter. o Afectan a todos los componentes del radar: antena, transmisor y receptor - a nivel RF, FI o vídeo-. CLASIFICACIÓN: No basados en el efecto doppler: STC, Área MTI, circuitos LOGFTC, circuitos CFAR. Basados en el efecto doppler: MTI, radares doppler pulsados y, actualmente, técnicas espectrales. A.- SISTEMAS NO BASADOS EN EL EFECTO DOPPLER • STC o GTC: circuito que varía la ganancia del sistema en función del tiempo. ⇓ • PACA (Programmable Adaptative Clutter Attenuator): la atenuación depende del valor específico del clutter en cada situación. 24 Clutter • ÁREA MTI: los blancos fijos se eliminan almacenando la señal en cada exploración (para un acimut dado) y restándola con la recibida en la siguiente exploración. ⇓ Mapas de clutter: datos se almacenan digitalmente • CIRCUITOS LOG-FTC: combinación de un circuito logarítmico y un diferenciador. • CIRCUITOS CFAR: trabaja con umbrales de detección adaptativos manteniendo la Pfa constante. B.- SISTEMAS BASADOS EN EL EFECTO DOPPLER MTI ⇒ Indicador de blancos móviles. RDP ⇒ Radares Doppler Pulsados. ⇓ Técnicas espectrales de tratamiento de la señal 25