Matrices y determinantes. Espacios vectoriales. Sistemas de
Anuncio

Índice de contenidos
1
2
3
MATRICES Y DETERMINANTES
1.1
Definiciones básicas . . . . . . . . . . . . . . . . . . . . . . . .
1.2
Operaciones con matrices. . . . . . . . . . . . . . . . . . . .
1.2.1 Suma de matrices. . . . . . . . . . . . . . . . . . . .
1.2.2 Producto de una matriz por un número. . . . . . .
1.2.3 Producto de matrices. . . . . . . . . . . . . . . . . .
1.2.4 Matriz inversa . . . . . . . . . . . . . . . . . . . . . .
1.2.5 Potencia de una matriz . . . . . . . . . . . . . . . . .
1.3
Determinante de una matriz cuadrada. . . . . . . . . . . .
1.3.1 Determinantes de orden 2 . . . . . . . . . . . . . . .
1.3.2 Determinantes de orden 3 . . . . . . . . . . . . . . .
1.3.3 Menor complementario y adjunto de un elemento
1.3.4 Determinantes de orden superior . . . . . . . . . . .
1.3.5 Matriz adjunta. Cálculo de la matriz inversa . . .
1.4
Rango de una matriz. . . . . . . . . . . . . . . . . . . . . . .
1.4.1 Cálculo del rango de una matriz . . . . . . . . . . .
1.5
Ejercicios propuestos en exámenes anteriores . . . . . . . .
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
.........
.........
.........
.........
.........
.........
.........
.........
.........
.........
.........
.........
.........
.........
........
.........
19
19
21
22
23
24
27
29
30
30
31
33
33
34
35
36
37
...........................
...........................
...........................
...........................
39
39
39
41
42
ESPACIOS VECTORIALES.
2.1
Definición y ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1 El espacio vectorial Rn . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.2 Subespacios vectoriales . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2
Combinación lineal de vectores . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Dependencia e independencia lineal de vectores . . . . . . . . . .
2.2.2 Subespacio vectorial generado por un conjunto de vectores . . .
2.3
Bases y dimensión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Base canónica de Rn . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2 Dimensión de un espacio vectorial . . . . . . . . . . . . . . . . . . .
2.3.3 Cambio de base en un espacio vectorial . . . . . . . . . . . . . . .
2.4
Suma e intersección de subespacios . . . . . . . . . . . . . . . . . . . . . . .
2.4.1 Suma de subespacios . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4.2 Intersección de dos subespacios . . . . . . . . . . . . . . . . . . . .
2.4.3 Teorema de la dimensión . . . . . . . . . . . . . . . . . . . . . . . . .
2.4.4 Suma directa de dos subespacios. Subespacios complementarios.
2.5
Ejercicios propuestos en exámenes anteriores . . . . . . . . . . . . . . . . .
SISTEMAS DE ECUACIONES LINEALES.
3.1
Preliminares. . . . . . . . . . . . . . . . . . . .
3.1.1 Primeros conceptos . . . . . . . . . .
3.1.2 Definiciones y notaciones . . . . . .
3.1.3 Clasificación de los sistemas lineales
1
1
4
4
5
6
7
7
8
8
10
11
12
14
15
16
18
v
vi
3.2
3.3
3.4
3.1.4 Teorema de Rouché-Frobenius. . . . . . . . . . . . . . . . . . . .
Resolución de sistemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Sistemas diagonales . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.2 Sistemas triangulares . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.3 Sistemas equivalentes. Método de resolución de Gauss . . . .
3.2.4 Método de Cramer . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.5 Método de Gauss-Jordan para el cálculo de la matriz inversa
3.2.6 Sistemas homogéneos. . . . . . . . . . . . . . . . . . . . . . . . .
Resolución de sistemas con Mathematica. . . . . . . . . . . . . . . .
Ejercicios propuestos en exámenes anteriores . . . . . . . . . . . . . . .
...........
...........
...........
...........
...........
...........
...........
...........
...........
...........
43
45
45
45
47
50
52
54
55
57
1
MATRICES Y DETERMINANTES
Este primer capı́tulo está dedicado a introducir los conceptos básicos relativos
a las matrices y determinantes. Aunque tales cuestiones son de un amplio
uso en diferentes sectores no sólo de la economı́a sino de cualquier disciplina
del saber, nosotros inicialmente usaremos dichos conceptos como herramienta
adecuada para la resolución, en el siguiente capı́tulo, de sistemas de ecuaciones lineales. Ası́ la estructura del capı́tulo y los conceptos en él estudiados
persiguen primordialmente dicho objetivo.
1.1
DEFINICIONES BÁSICAS
Llamamos matriz de números reales con m filas y n columnas, o de tipo m × n, a
una lista de números reales ordenados
en la forma:
a11 a12 · · · a1n
a21 a22 · · · a2n
A = (aij )m×n =
..
..
...
...
.
.
am1 am2 · · · amn
donde aij ∈ R, para todo i = 1, . . . , m, j = 1, . . . , n. El elemento aij es el que se
encuentra en la fila i y la columna j. Al conjunto de todas las matrices de orden
m × n se le denota mediante Mm×n . Cuando una matriz es del tipo 1 × n se le llama
matriz fila o vector fila de orden n y una matriz columna o vector columna de orden
m si es del tipo m × 1.
Dos matrices se dicen iguales si tienen igual número de filas y columnas y coinciden
elemento a elemento.
- Ejemplo 1.1
µ
¶
−2 1 0
• La matriz A =
es una matriz de orden 2 × 3.
4 2 4
µ ¶
1
La matriz B =
es una matriz columna de orden 2.
0
1
2
DEFINICIONES BÁSICAS
Dada una matriz A = (aij ), una submatriz de A es cualquier matriz obtenida desde
A suprimiendo filas y/o columnas.
- Ejemplo 1.2
• Dada la matriz A =
Ã
!
1 2 3 4
5 6 7 8 , la matriz
9 0 1 2
µ
¶
6 7 8
B=
0 1 2
es una submatriz de A obtenida suprimiendo
de A. De igual forma, la matriz
Ã
1 2
C= 5 6
9 0
es la submatriz de A obtenida suprimiendo la
la primera fila y la primera columna
!
4
8
2
tercera columna de A.
Una matriz con igual número de filas que de columnas (de tipo n × n) se dice que es
una matriz cuadrada de orden n. Denotaremos mediante Mn al conjunto de matrices
cuadradas de orden n.
Sea A ∈ Mm×n . La matriz transpuesta de A, At ∈ Mn×m , es la matriz que se
obtiene, desde A, cambiando la posición de las filas y columnas, entre sı́.
- Ejemplo 1.3
Ã
!
µ
¶
1 2
1 0 −1
0 3 .
•
es la matriz transpuesta de
2 3 2
−1 2
De forma evidente, se obtiene la propiedad (At )t = A.
La matriz de orden m × n con todos los elementos nulos se llama matriz cero. Se
denotará mediante 0m×n o simplemente por 0.
0 0 0 ... 0
0 0 0 . . . 0
0 0 0 . . . 0 .
0=
. . . .
.. .. .. . . ...
0 0 0 ... 0
Dada A ∈ Mn , la diagonal principal de A es la matriz fila
(a11 , a22 , . . . , ann ).
Es decir, los elementos en negrita en la figura siguiente:
a11 a12 a13 . . . a1n
a21 a22 a23 . . . a2n
a31 a32 a33 . . . a3n .
A=
.
..
.. . .
..
..
.
.
.
.
an1 an2 an3 . . . ann
MATRICES Y DETERMINANTES
3
La traza de A ∈ Mn , tr(A), es la suma de los elementos de la diagonal principal:
n
X
tr(A) = a11 + a22 + · · · + ann =
aii .
i=1
- Ejemplo 1.4
−1 0
3
1
• La traza de la matriz A = 0 0
es
2
0 0 −1
tr(A) = a11 + a22 + a33 = −1 + 0 − 1 = −2.
Una matriz cuadrada A se dice triangular superior (inferior) si todos los elementos
por debajo (encima) de la diagonal principal son nulos y se llamará diagonal si es
tanto triangular superior como triangular inferior (esto es, todo elemento fuera de la
diagonal es cero). En muchas ocasiones, para simplificar la notación, designaremos
por diag(a1 , a2 , · · · , an ) a la matriz diagonal
a1 0 0 · · · 0
0 a2 0 · · · 0
diag(a1 , a2 , · · · , an ) =
... ... ... . . . ... .
0 0 0 · · · an
- Ejemplo 1.5
• Las matrices
−1 0
3
1
0 0
,
2
0 0 −1
1
1
1
1
0
1
1
1
0
0
1
1
0
0
0
1
µ
y
1 0
0 1
¶
son, respectivamente, triangular superior, triangular inferior y diagonal.
Llamamos matriz identidad de orden n y la denotaremos por In ó simplemente por
I, a la matriz diagonal de orden n con todos los elementos de la diagonal principal
iguales a 1.
1 0 ... 0
0 1 . . . 0
n)
In = diag(1, 1, · · ·, 1) =
... ... . . . ... .
0 0 ... 1
4
OPERACIONES CON MATRICES.
1.2
OPERACIONES CON MATRICES.
1.2.1
Suma de matrices.
No siempre es posible sumar dos matrices, para ello será necesario que ambas sean
del mismo tipo. Dadas dos matrices A = (aij ), B = (bij ) ∈ Mm×n la matriz suma
de A y B es una matriz (del mismo tipo a las anteriores), A + B = C ∈ Mm×n ,
cuyos elementos se obtienen sumando término término a término los elementos de
A y de B, es decir, cij = aij + bij , i = 1, 2, · · · , m, j = 1, 2, · · · , n.
a11 a12
a21 a22
A+B =
..
...
.
am1 am2
a11 + b11
a21 + b21
=
..
.
am1 + bm1
. . . a1n
b11 b12 . . . b1n
. . . a2n b21 b22 . . . b2n
+ .
..
.. . .
..
..
.
.
. ..
.
.
. . . amn
bm1 bm2 . . . bmn
a12 + b12 . . . a1n + b1n
a22 + b22 . . . a2n + b2n
.
..
..
..
.
.
.
am2 + bm2 . . . amn + bmn
- Ejemplo 1.6
µ
• Si A =
1 2
3 4
¶
µ
yB=
¶
−2
0
, entonces
1 −4
µ
A+B =
1 2
3 4
¶
µ
+
−2
0
1 −4
¶
µ
=
−1 2
4 0
¶
.
Como primeras propiedades de la suma de matrices obtenemos las siguientes:
+ Resultado 1.2.1 Sean A, B, C ∈ Mm×n y 0 ∈ Mm×n la matriz cero. Entonces se verifica:
• (Conmutativa) A + B = B + A.
• (Asociativa) A + (B + C) = (A + B) + C.
• (Elemento neutro) A + 0 = 0 + A = A.
• (Elemento opuesto) Existe una matriz A ∈ Mm×n , que llamaremos matriz
opuesta de A, tal que A + A = 0.
• (A + B)t = At + B t .
Resulta inmediato comprobar que la matriz A se obtiene cambiando de signo todos
los elementos de la matriz A, es decir, aij = −aij , i = 1, 2, · · · , n, j = 1, 2, · · · , m.
En lo sucesivo denotaremos a esta matriz por −A.
MATRICES Y DETERMINANTES
1.2.2
5
Producto de una matriz por un número.
Sea A ∈ Mm×n y λ ∈ R, definimos la matriz producto de
mediante λ · A ∈ Mm×n como:
λ a11 λ a12
a11 a12 . . . a1n
a21 a22 . . . a2n λ a21 λ a22
= .
λ·
..
..
..
..
...
.
.
.
. ..
λ am1 λ am2
am1 am2 . . . amn
λ por A, y la denotamos
. . . λ a1n
. . . λ a2n
.
..
..
.
.
. . . λ amn
Con esta definición resulta que la matriz opuesta de A es precisamente la matriz
(−1) · A, es decir, −A = (−1) · A.
- Ejemplo 1.7
µ
4·
1 −1 2 0
2
3 0 0
¶
µ
=
4 −4 8 0
8 12 0 0
¶
.
+ Resultado 1.2.2 Sean λ, µ ∈ R y A, B ∈ Mm×n . Entonces se cumplen las
siguientes propiedades:
• (Distributiva respecto a la suma de matrices) λ · (A + B) = λ · A + λ · B,
• (Distributiva respecto a la suma de escalares) (λ + µ) · A = λ · A + µ · A,
• (Elemento unidad) 1 · A = A,
• (Pseudoasociativa) (λ µ) · A = λ · (µ · A),
• λ · 0 = 0, 0 · A = 0,
• (λ · A)t = λ · At ,
Una matriz cuadrada A se dice simétrica si coincide con su transpuesta, esto es,
A = At . Esto, a su vez, se traduce en la relación entre coeficientes siguiente: aij =
aj i , para cualesquiera i, j = 1, . . . , n.
La matriz cuadrada A se dirá antisimétrica si, cumple que At = −A. Esto es, si
aij = −aji , para cualesquiera i, j = 1, . . . , n. Es fácil deducir, empleando la relación
entre coeficientes anterior para el caso i = j, que los elementos de la diagonal
principal de matrices antisimétricas son todos nulos.
- Ejemplo 1.8
Ã
•
1 2 −1
2 4
0
−1 0
6
!
Ã
es una matriz simétrica y
0
2 −1
−2
0
3
1 −3
0
!
es antisimétrica.
Toda matriz cuadrada se puede expresar como suma de una matriz simétrica y otra
antisimétrica. Más concretamente, dada la matriz A ∈ Mn se puede escribir como
A = B + C,
donde B es la matriz simétrica B = 12 (A + At ) y C es la matriz antisimétrica
C = 21 (A − At ).
6
OPERACIONES CON MATRICES.
- Ejemplo 1.9
Ã
• Dada la matriz A =
1
4 −2
0
4
3
0 −3
6
Ã
!
1
2
−1
Ã
0
1
C = (A − At ) = −2
2
1
1
B = (A + At ) =
2
1.2.3
, entonces A = B + C, donde
!
2 −1
4
0
es una matriz simétrica y
0
6
!
2 −1
0
3
es antisimétrica.
−3
0
Producto de matrices.
Al igual que ocurrı́a con la suma, no siempre será posible multiplicar dos matrices
entre sı́. De hecho, sólo existirá la multiplicación cuando exista una cierta compatibilidad entre el número de filas y columnas de ambas. Más concretamente, dadas
las matrices A ∈ Mm×n y B ∈ Mn×p se define la matriz producto de A y B, y
la notaremos por A · B, como una matriz C = A · B ∈ Mn×p cuyos elementos se
obtienen en la forma
n
X
cij =
air brj ,
i = 1, . . . , m, j = 1, . . . , p.
r=1
Es decir, el elemento de la matriz A · B en la posición (i, j) se obtiene sumando los
productos término a término de los elementos de la fila i de A y la columna j de B.
- Ejemplo 1.10
−1
1
µ
¶
3
2 −1 0
2
·
=
0 −2
1 −1 1 2×3
2
0 4×2
−1 · (−1) + 1 · (−1) −1 · 0 + 1 · 1
−1
0
1
2 · (−1) + 3 · (−1)
2 · 0 + 3 · 1 7 −5
3
=
0 · (−1) − 2 · (−1)
0 · 0 − 2 · 1 −2
2 −2
2 · (−1) + 0 · (−1)
2·0+0·1
4 −2
0 4×3
−1 · 2 + 1 · 1
2·2+3·1
0·2−2·1
2·2+0·1
+ Propiedad 1.2.1 Propiedades del producto de matrices
• (A · B) · C = A · (B · C), para A ∈ Mm×n , B ∈ Mn×p y C ∈ Mp×q .
• (A + B) · C = A · C + B · C, para A, B ∈ Mm×n y C ∈ Mm×p .
• A · (B + C) = A · B + A · C, para A ∈ Mm×n y B, C ∈ Mm×n .
• I · A = A · I = A, 0 · A = A · 0 = 0, donde las matrices I y 0 han sido
convenientemente elegidas, para que tengan sentido las operaciones, y A ∈
Mn×m .
• (A · B)t = B t · At , para A ∈ Mm×n y B ∈ Mn×p .
MATRICES Y DETERMINANTES
7
Una observación interesante es que, en general, el producto de matrices, aún cuando
esté definido en ambos sentidos, no siempre es conmutativo. Es decir, dadas matrices
A ∈ Mm×n y B ∈ Mn×m , A · B no tiene porqué coincidir con B · A. (De hecho,
A · B ∈ Mm y B · A ∈ Mn ; la propiedad conmutativa tampoco es cierta, en general,
para el caso m = n).
1.2.4
Matriz inversa
Una matriz B ∈ Mn se dice inversa de otra A ∈ Mn si satisfacen las igualdades
A · B = B · A = I.
En tal caso, a la matriz B se le denotará mediante A−1 y, como es lógico, también
A es inversa de B, (es decir, A = B −1 y A = (A−1 )−1 ).
Además, la matriz inversa de A, en caso de existir, es siempre única. Una matriz
A ∈ Mn que posee inversa se le llama matriz regular. En caso contrario, se dice que
A es singular.
- Ejemplo 1.11
µ
• La matriz
1.2.5
¶
µ
¶
1 1
0
1
es inversa de
, pues
1 0
1 −1
µ
¶µ
¶ µ
¶µ
¶ µ
¶
1 1
0
1
0
1
1 0
1 0
=
=
1 0
1 −1
1 −1
0 1
0 1
Potencia de una matriz
Dada una matriz cuadrada A y número natural k ∈ N0 , donde N0 = N∪0, definimos
la potencia k-ésima de A, de forma inductiva como
½
I
si k = 0
k
A =
Ak−1 · A si k > 0
Las potencias de matrices, como productos matriciales que son, se rigen por las
mismas propiedades del producto de matrices; sin embargo, destacamos dos nuevas
propiedades de particular interés.
+ Resultado 1.2.3 Propiedades de las potencias de una matriz:
• Dada A ∈ Mn y k, l ∈ N0 ,
Ak · Al = Al · Ak = Ak+l ,
(Ak )l = Akl .
• Si A ∈ Mn es una matriz diagonal, esto es,
A = diag(a1 , a2 , · · · , an )
y k ∈ N0 , entonces Ak es también una matriz diagonal, siendo
¡
¢
Ak = diag ak1 , ak2 , · · · , akn .
8
1.3
1.3.1
DETERMINANTE DE UNA MATRIZ CUADRADA.
DETERMINANTE DE UNA MATRIZ CUADRADA.
Determinantes de orden 2
Supongamos que queremos resolver un sistema lineal de dos ecuaciones con dos
incógnitas
½
a11 x1 + a22 x2 = c1
(1.3.1)
S≡
a21 x1 + a22 x2 = c2
Usando el producto matricial y la igualdad de matrices, el sistema anterior puede
escribirse matricialmente enµla forma ¶ µ ¶ µ ¶
a11 a12
x1
c1
=
.
a21 a22
x2
c2
µ
¶
a11 a12
se denomina matriz de coeficientes del sistema.
La matriz A =
a21 a22
Para resolver el sistema (1.3.1) aplicamos el método de reducción: (multiplicamos
la primera ecuación por a22 y la segunda ecuación por −a12 )
½
½
a22 (a11 x1 + a22 x2 ) = c1 a22
a11 a22 x1 + a12 a22 x2 = c1 a22
⇒
−a12 (a21 x1 + a22 x2 ) = −c2 a12
−a21 a12 x1 − a22 a12 x2 = −c2 a12
Sumando ambas ecuaciones se obtiene:
(a11 a22 − a21 a12 )x1 = c1 a22 − c2 a12 .
c1 a22 − c1 a21
Si a11 a22 − a21 a12 6= 0, entonces x1 =
.
a11 a22 − a21 a12
c2 a11 − c1 a21
Procediendo de forma análoga se llegarı́a a que x2 =
.
a11 a22 − a21 a12
El número a11 a22 − a12 a21 se denomina determinante de la matriz A y se denota
por
¯
¯
µ
¶
¯ a11 a12 ¯
a11 a12
¯ = a11 a22 − a12 a21 .
det(A) = det
= |A| = ¯¯
a21 a22
a21 a22 ¯
Utilizando la definición de determinante podemos enunciar el siguiente resultado
conocido como regla de Cramer para sistemas de orden 2 × 2.
+ Resultado 1.3.1 (Regla de Cramer para sistemas de orden 2 × 2)
Si el determinante de la matriz de coeficientes del sistema (1.3.1) es distinto de
cero, entonces las solución de (1.3.1) viene dada por
¯
¯
¯
¯
¯ a11 c1 ¯
¯ c1 a12 ¯
¯
¯
¯
¯
¯ a21 c2 ¯
¯ c2 a22 ¯
¯ , x2 = ¯
¯
x1 = ¯¯
¯
¯ a11 a12 ¯ .
¯
¯ a11 a12 ¯
¯
¯ a21 a22 ¯
¯ a21 a22 ¯
1.3.1.1 Propiedades de los determinantes de orden 2. Enunciamos a continuación algunas de las propiedades de los determinantes de orden 2 cuya comprobación resulta inmediata. Dichas propiedades se generalizarán posteriormente a
determinantes de orden superior.
MATRICES Y DETERMINANTES
9
+ Resultado 1.3.2
a) El determinante de una matriz coincide con el de su transpuesta
¯
¯ ¯
¯
¯ a11 a12 ¯ ¯ a11 a21 ¯
¯
¯=¯
¯
¯ a21 a22 ¯ ¯ a12 a22 ¯ .
(Esta propiedad nos permite que todos los resultados que enunciamos a continuación
para las filas de una matriz sean también válidos para las columnas).
b) Si una matriz tiene una fila (columna) de ceros, su determinante es cero.
c) Si intercambiamos dos filas (columnas) de una matriz, el determinante cambia
de signo.
d) Si una matriz tiene sus dos filas (columnas) iguales su determinante es cero.
e) Si multiplicamos cada elemento de una fila (columna) por un número, el determinante queda multiplicado por ese número,
¯
¯
¯
¯
¯ λa11 a12 ¯
¯ a11 a12 ¯
¯
¯
¯
¯
¯ λa21 a22 ¯ = λ ¯ a21 a22 ¯ .
f) Si una matriz tiene dos filas (columnas) proporcionales, el determinante vale
cero.
g) Si los elementos de una fila (columna) de una matriz vienen expresados como
suma de dos elementos, entonces el determinante se descompone en suma de
dos determinantes del siguiente modo
¯
¯ ¯
¯ ¯
¯
¯ a11 + a0 a12 ¯ ¯ a11 a12 ¯ ¯ a0 a12 ¯
11
11
¯
¯
¯
¯
¯
¯
¯ a21 + a021 a22 ¯ = ¯ a21 a22 ¯ + ¯ a021 a22 ¯ .
h) Si a una fila (columna) le sumamos la otra fila (columna) multiplicada por un
número, el determinante no cambia.
¯
¯ ¯
¯
¯ a11 + λa12 a12 ¯ ¯ a11 a12 ¯
¯
¯=¯
¯
¯ a21 + λa22 a22 ¯ ¯ a21 a22 ¯ .
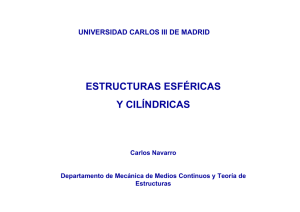
1.3.1.2 Una interpretación geométrica del determinante. En el siguiente paralelogramo se representa gráficamente la suma de los vectores (x1 , y1 ) y (x2 , y2 ).
(x2 , y2 )
(x1 , y1 )
Para calcular el área comprobamos que
10
DETERMINANTE DE UNA MATRIZ CUADRADA.
A
Área del paralelogramo
= Área del rectángulo − Área de A
− Área de B − · · · − Área de F
= (x1 + x2 )(y1 + y2 ) − x2 y1 − x1 y1 /2
− x2 y2 /2 − x2 y2 /2 − x1 y1 /2 − x2 y1
= x1 y 2 − x2 y 1
B
y2
D
y1 C
E
x2
F
x1
Ası́, es fácil concluir que el área del paralelogramo coincide con el valor del determinante siguiente
¯
¯
¯x1 x2 ¯
¯
¯
¯ y1 y2 ¯ = x1 y2 − x2 y1 .
1.3.2
Determinantes de orden 3
Los determinantes de orden 3 surgen de forma análoga al considerar un sistema
lineal de 3 ecuaciones y 3 incógnitas
(
Ã
!Ã ! Ã !
a11 x1 + a12 x2 + a13 x3 = c1
a11 a12 a13
x1
c1
x2 = c2 .
S ≡ a21 x1 + a22 x2 + a23 x3 = c2 ⇔ a21 a22 a23
a31 x1 + a32 x2 + a33 x3 = c3
a31 a32 a23
x3
c3
Mediante un proceso de reducción (un poco más engorroso) se llega a expresiones
del tipo
∆1
∆2
∆3
x1 =
, x2 =
,
x3 =
,
∆
∆
∆
supuesto que ∆ 6= 0, donde
∆ = a11 a22 a33 + a21 a32 a13 + a31 a12 a23 − a31 a22 a23 − a21 a12 a33 − a11 a32 a23 . (1.3.2)
Ã
!
a11 a12 a13
El valor de ∆ se llama determinante de la matriz A = a21 a22 a23 y se denota
a31 a32 a23
por
¯
¯
Ã
!
¯ a11 a12 a13 ¯
a11 a12 a13
¯
¯
det(A) = det a21 a22 a23 = |A| = ¯ a21 a22 a23 ¯ .
¯
a
a
a
a
a
a ¯
31
32
23
31
32
23
Para recordar la fórmula (1.3.2) se recurre a la regla de Sarrus. Para ello se repiten
las dos primeras filas del determinante. Las diagonales trazadas desde a11 , a21 y a31
corresponden a los sumandos positivos y las diagonales trazadas desde a13 , a23 y a33
a los sumandos negativos.
a11 a12 a13 −
+ a11 a12 a13
&
.
+ a21 a22 a23
a21 a22 a23 −
& &
. .
+ a31 a32 a33
a31 a32 a33 −
& &
. .
a11 a12 a13
a11 a12 a13
&
.
a21 a22 a23
a21 a22 a23
MATRICES Y DETERMINANTES
11
- Ejemplo 1.12
¯
¯
¯ 1 −1 0 ¯
¯
¯
2 0 ¯ = 1 · 2 · 1 − 1 · 0 · 3 − 2 · 2 · 0 − 2 · 3 · 0 + 1 · 2 · 1 + 1 · 2 · 0 = 4.
¯2
¯ 3 −2 1 ¯
1.3.2.1 Propiedades de los determinantes de orden 3. Las propiedades de los
determinantes de orden 3 son análogas a las de los determinantes de orden 2. De
hecho las propiedades a)-g) que figuran en la Proposición 1.3.2 se enuncian exactamente igual para determinantes de orden 3. Por otra parte, la propiedad h) admite
una formulación más general.
+ Resultado 1.3.3
h) Si a una fila (columna) le sumamos una combinación lineal de las restantes
filas (columnas), el determinante no varı́a.
i) Si una fila (columna) es combinación lineal de las restantes filas (columnas),
el determinante es cero.
La propiedad h) es especialmente interesante porque nos permite efectuar transformaciones en las filas y columnas de una matriz A sin que se altere el valor de su
determinante. De hecho esté será el procedimiento que seguiremos para el cálculo
de determinantes de orden superior.
1.3.3
Menor complementario y adjunto de un elemento
Consideremos la matriz
Ã
A=
a11 a12 a13
a21 a22 a23
a31 a32 a23
!
.
Se llama menor complementario del elemento aij , y lo representamos por αij , al
determinante de la submatriz de orden 2 × 2 obtenida al suprimir la fila i y la
columna j de la matriz A, es decir, al suprimir la fila y la columna en la que se
encuentra dicho elemento. Por ejemplo:
¯
¯
¯
¯
¯
¯
¯ a11 a13 ¯
¯ a11 a12 ¯
¯ a22 a23 ¯
¯
¯
¯
¯ , α23 = ¯
α11 = ¯¯
¯ a31 a32 ¯ , a22 = ¯ a31 a33 ¯ .
a32 a33 ¯
Se llama adjunto del elemento aij , y lo denotaremos por Aij , al número
Aij = (−1)i+j αij ,
es decir, el adjunto del elemento aij tiene el mismo valor que el menor complementario αij anteponiendo el signo + o − según que la suma de los ı́ndices i, j sea par
o impar. Por ejemplo:
¯
¯
¯
¯
¯ a11 a12 ¯
¯ a22 a23 ¯
2+3
1+1
¯.
¯
¯
¯
,
A23 = (−1) α23 = − ¯
A11 = (−1) α11 = ¯
a31 a32 ¯
a32 a33 ¯
12
DETERMINANTE DE UNA MATRIZ CUADRADA.
+ Resultado 1.3.4 El determinante de la matriz A se puede obtener como la
suma de los elementos de una fila o columna multiplicados por sus adjuntos correspondientes
Comprobemos que se cumple esta propiedad. En efecto,
|A| = a11 a22 a33 + a21 a32 a13 + a31 a12 a23 − a31 a22 a23 − a21 a12 a33 − a11 a32 a23
= a11 (a22 a33 − a32 a23 ) − a12 (a21 a33 − a31 a23 ) + a13 (a21 a32 − a31 a22 )
¯
¯
¯
¯
¯
¯
¯ a21 a22 ¯
¯ a21 a23 ¯
¯ a22 a23 ¯
¯
¯
¯
¯ − a12 ¯
= a11 ¯¯
¯ a31 a33 ¯ + a13 ¯ a31 a32 ¯
a32 a33 ¯
= a11 A11 + a12 A12 + a13 A13 .
(1.3.3)
En la expresión (1.3.3) se dice que el determinante se obtiene desarrollando los
elementos de la primera fila por sus adjuntos correspondientes. De igual forma puede
comprobarse fácilmente que se obtiene el mismo resultado desarrollando por los
elementos de cualquier fila o columna.
1.3.3.1 Interpretación geométrica de un determinante de orden 3. También
puede darse una interpretación geométrica para determinantes de orden 3. En este
caso, el volumen del paralelepı́pedo determinado por los vectores
(x1 , y1 , z1 ),
(x2 , y2 , z2 ) y (x3 , y3 , z3 )
coincide (salvo el signo) con el valor del determinante de la matriz cuyas filas o
columnas vienen dadas por las coordenadas de los vectores.
- Ejemplo 1.13
• El volumen de la siguiente figura puede calcularse mediante el determinante
(−1, 0, 1)
(2, 0, 2)
¯
¯
¯2 0 −1¯
¯
¯
¯0 3 0 ¯ = 12
¯2 1 1 ¯
(0, 3, 1)
1.3.4
Determinantes de orden superior
La generalización de la definición de adjunto a matrices de orden n y la Proposición
1.3.4 nos permitirán calcular, de forma inductiva, el determinante de una matriz
cuadrada de orden superior a 3. Basta observar que los menores complementarios
de los elementos de una matriz de orden 4 serán determinantes de orden 3 que ya
sabemos calcular. De hecho vamos a definir los determinantes de orden superior
utilizando un desarrollo análogo al dado en la expresión (1.3.3).
MATRICES Y DETERMINANTES
13
Sea A una matriz cuadrada de orden n
a11 a12 . . . a1n
a21 a22 . . . a2n
A=
.. . .
. ,
...
. ..
.
an1 an2 . . . ann
se define el determinante de A, y lo notaremos por cualquiera de las expresiones
siguientes,
¯
¯
¯ a11 a12 . . . a1n ¯
a11 a12 . . . a1n
¯
¯
¯ a21 a22 . . . a2n ¯
a21 a22 . . . a2n
det(A) = det
.. . .
. ¯,
.. . .
. = |A| = ¯¯ ..
...
. .. ¯¯
. ..
.
.
¯ .
¯ an1 an2 . . . ann ¯
an1 an2 . . . ann
al valor obtenido desarrollando los elementos de la primera fila por sus adjuntos
correspondientes, es decir,
n
X
det(A) = a11 A11 + a12 A12 + · · · + a1n A1n =
a1j A1j .
(1.3.4)
j=1
Observaciones:
• El adjunto de un elemento tiene el mismo significado que el dado para matrices
cuadradas de orden 3.
• La definición de determinante dada en (1.3.4) es inductiva, es decir, si sabemos
calcular determinantes de orden 2 sabemos calcular de orden 3 y, por tanto, de
orden 4 y, por tanto, de orden 5, etc.
• Puede probarse que el valor dado en (1.3.4) no varı́a si hacemos el desarrollo
por los elementos de cualquier otra fila o columna.
• De igual forma, puede probarse por inducción, que los determinantes de orden
superior cumplen las mismas propiedades que las enunciadas para determinantes
de orden 2 y 3.
- Ejemplo 1.14
¯
¯ 7
¯
¯ 2
¯ 5
¯
¯ −1
4
0
1
7
¯
¯
¯
¯
¯
¯
¯
¯
¯
1 9¯
¯
¯ 2 6 3¯
¯ 7 1 9¯
¯ 7 1 9¯
¯7 1 9 ¯
6 3¯
¯
¯
¯
¯
¯
¯
¯
¯
= −4 ¯ 5 6 11 ¯ + 0 ¯ 5 6 11 ¯ − 1 ¯ 2 6 3 ¯ + 7 ¯ 2 6 3 ¯ = 1628.
6 11 ¯¯
¯ −1 2 8 ¯
¯ −1 2 8 ¯
¯ −1 2 8 ¯
¯ 5 6 11 ¯
2 8¯
En el ejemplo anterior hemos calculado el determinante haciendo el desarrollo de los
elementos de la segunda columna por sus adjuntos correspondientes. El cálculo del
determinante queda reducido al cálculo de (como máximo) 4 determinantes de orden
3. Observemos que la presencia de un cero en el elemento a22 de la matriz nos ahorra
el cálculo del adjunto correspondiente en el desarrollo. Por tanto, resulta conveniente
utilizar para el desarrollo del determinante aquella fila o columna que tenga mayor
número de ceros. La presencia de un cero nos ahorra cálculos y tiempo. Precisamente
en esto se basa la técnica de cálculo de determinantes de orden superior: “Si no hay
ceros, los hacemos”. Para ello utilizaremos la propiedad h) de los determinantes:
“Si a una fila (columna) le sumamos una combinación lineal de las restantes filas
(columnas), el determinante no varı́a”.
14
DETERMINANTE DE UNA MATRIZ CUADRADA.
- Ejemplo 1.15
¯
¯ 7
¯
¯ 2
¯ 5
¯
¯ −1
4
0
1
7
¯
¯
¯ −13 0 −23 −35 ¯
F1 → F1 − 4F3
¯
¯
F2 → F2
2 0
6
3¯
¯
=¯
=
F3 → F3
5 1
6
11 ¯¯
¯
¯
¯
F4 → F4 − 7F3
−36 0 −40 −69
¯
¯
¯ −13 −23 −35 ¯
¯
¯
6
3 ¯ = 1628.
= −1 ¯ 2
¯ −36 −40 −69 ¯
¯
1 9¯
¯
6 3¯
=
6 11 ¯¯
¯
2 8
desarrollando por
los elementos de la
segunda columna
Otras propiedades interesantes de los determinantes vienen recogidas en la proposición siguiente:
+ Resultado 1.3.5 Sean A, B ∈ Mn , entonces
a) Si A ∈ Mn es una matriz triangular, entonces el determinante de A se obtiene
multiplicando los elementos situados en la diagonal principal, es decir,
|A| = a11 a22 · · · ann .
b) En particular, si A es una matriz diagonal A = diag(a1 , a2 , · · · , an ), entonces
|A| = a1 a2 · · · an .
En particular, |I| = 1.
c) (Fórmula de Binet-Cauchy): |A · B| = |A| · |B|.
d) A es regular si, y sólo si, |A| 6= 0. Además, en tal caso, |A−1 | =
1
.
|A|
e) |Ak | = |A|k , para k ∈ N0 .
1.3.5
Matriz adjunta. Cálculo de la matriz inversa
Dada una matriz A ∈ Mn se define la matriz adjunta de A, y se denota por adj(A),
a la matriz cuyos elementos en la posición (i, j) son los adjuntos Aij de la matriz A.
El cálculo de la matriz adjunta nos proporciona un método para calcular la matriz
inversa, A−1 , de una matriz A regular.
+ Resultado 1.3.6 Sea A ∈ Mn una matriz regular, entonces
¢t
¡ ¢
1 ¡
1
A−1 =
adj(A) =
adj At .
|A|
|A|
- Ejemplo 1.16
• Supongamos que queremos calcular la inversa de la matriz
1 1 1
1
1
−1 0 0
A=
.
1 2 1 −1
3 0 0
1
MATRICES Y DETERMINANTES
15
En primer lugar hemos de probar que A es una matriz regular. Para ello calculamos
su determinante
¯
¯
¯
¯
¯ 1 1 1
¯ 1 1 1
1¯
F1 → F1
1¯
¯
¯
¯
¯
F2 → F2
1¯
1¯
¯ −1 0 0
¯ −1 0 0
|A| = ¯
=
=
¯
¯ 0 1 0 −2 ¯
F3 → F3 − F1
¯ 1 2 1 −1 ¯
¯
¯
¯ 3 0 0
¯ 3 0 0
¯
F4 → F4
1
1¯
¯
¯
¯ −1 0
1¯
¯
¯
= 1 ¯ 0 1 −2 ¯ = −4.
¯ 3 0
1¯
Como el determinante es distinto de cero, la matriz
namos la matriz adjunta, calculando los adjuntos de
la matriz A,
¯
¯
¯
¯0 0
¯ −1
1¯
¯
¯
¯
A11 = ¯ 2 1 −1 ¯ = 0,
A12 = − ¯ 1
¯0 0
¯
¯ 3
1
A es regular. Ahora determicada uno de los elementos de
¯
0
1¯
¯
1 −1 ¯ = 4,
0
1¯
···
La matriz adjunta viene dada por
0
4 −8
0
8 −3
1 −6
.
adj(A) =
0 −4
4
0
−1 −2
4 −1
Finalmente, la matriz inversa será
1
0
0 − 41
4
0
1
0 −1 t
3
1
¢t
1 ¡
1 4 −6 −4 −2
1
−1
2
2 .
=
adj(A) = −
=
−8
8
4
4
|A|
4
2 −2 −1 −1
0
3
0 −1
3
1
0
0
4
4
A−1
También con ayuda del Mathematica podrı́amos haber obtenido dicho inversa
1.4
RANGO DE UNA MATRIZ.
Si en una matriz A ∈ Mm×m seleccionamos r filas y r columnas (r ≤ m, r ≤ n)
se forma una submatriz cuadrada de orden r. Al determinante de esta matriz lo
llamaremos menor de orden r de la matriz A.
El rango de A es el mayor de los ordenes de los menores de A no nulos; es decir, el
mayor orden de las submatrices cuadradas de A con determinante distinto de cero.
De forma evidente, se cumple que si A es una submatriz de B, entonces el rango de
A es siempre menor o igual que el rango de B.
- Ejemplo 1.17
1 −1 1
0 2
0
• La matriz A =
tiene rango 3.
1
2 1
0
0 1
16
RANGO DE UNA MATRIZ.
En efecto, la submatriz cuadrada de orden 3 obtenida a partir de la matriz A seleccionando las 3 primeras filas y las 3 primeras columnas
Ã
!
1 −1 1
0
0 2
1
2 1
tiene determinante no nulo.
Este nuevo concepto nos permite obtener una caracterización de las matrices regulares en función de él.
+ Resultado 1.4.1 Una matriz cuadrada A ∈ Mn es regular si, y sólo si, su
rango es n.
Como es lógico, desde esta proposición también se concluye una caracterización de
la singularidad de una matriz cuadrada: A ∈ Mn es singular si, y sólo si, su rango
es estrictamente menor que n.
1.4.1
Cálculo del rango de una matriz
Para la determinación del rango de una matriz resulta conveniente tener en cuenta
las siguientes observaciones:
• De la definición inductiva de los determinantes se deduce inmediatamente que
si todos los memores de orden r de una matriz A son nulos, entonces también
serán nulos todos los menores de orden mayor que r que pudieran formarse en la
matriz A. Esto nos sugiere una estrategia para calcular el rango de una matriz:
seleccionar menores no nulos comenzando por menores de orden 1, 2, etc.
• Como sabemos, la operación de sumar a una fila (columna) una combinación
lineal de las restantes filas (columnas) no afecta al valor del determinante de
una matriz y, por tanto, dicha operación tampoco afectará al rango de la matriz.
De igual modo las operaciones de permutación de filas o columnas (que sólo
afectan al signo del determinante) y la de multiplicación de los elementos de
una fila o columna por un número distinto de cero (que sólo afecta al valor del
determinante pero no al hecho de que éste sea o no distinto de cero), tampoco
alterará el valor del rango de la matriz.
Estas operaciones se llamarán operaciones elementales y constituyen una buena
herramienta para simplificar el cálculo del rango de una matriz.
• Por otra parte, también sabemos que si una matriz cuadrada tiene una fila
(columna) que es combinación lineal de las restantes filas (columnas), el determinante vale cero. Esto se traduce en la siguiente propiedad: si una matriz tiene
una fila (columna) que es combinación lineal de las restantes filas (columnas),
dicha fila (columna) puede suprimirse dado que no afectará al rango de la matriz.
Las observaciones anteriores nos sugieren el siguiente procedimiento para calcular el
rango de una matriz:
MATRICES Y DETERMINANTES
17
1) Comprobar si hay alguna fila (columna) que sea combinación lineal de las
restantes filas (columnas). En tal caso, ésta se suprime.
2) Seleccionar un menor de orden 2 que sea distinto de cero y marcarlo sobre la
matriz. Si esto no es posible, el rango serı́a 1 (salvo en el caso trivial de que
todos los elementos de la matriz sean cero en que el rango serı́a 0).
3) Formar posibles menores de orden 3 que contengan al menor de orden 2 seleccionado anteriormente (este proceso se llama orlar filas o columnas). Si todos
estos menores son cero, el rango serı́a 2; en caso contrario tomarı́amos el menor
de orden 3 y continuamos estudiando los de orden 4, etc.
- Ejemplo 1.18
• Para calcular el rango de la matriz
−1
3
0
1 2
5
1
2 3
0
,
A=
−3 −1 −2 −1 0
3 11
4
5 6
procedemos de la siguiente manera:
1) Comprobamos si hay alguna fila (columna) que sea combinación lineal de las
restantes filas (columnas). Aparentemente no.
2) Buscamos un menor de orden 2 que sea distinto de cero y lo señalamos en la
matriz. En nuestro caso, el menor obtenido tomando las dos primeras filas y las
dos primeras columnas satisface esta condición,
¯
¯
¯ −1 3 ¯
¯
¯
¯ 0 5 ¯ = −5 6= 0.
3) Orlamos la 3a fila y formamos menores de orden 3 con
¯
¯
¯
¯
¯ −1
¯ −1
3
0¯
3
1¯
¯
¯
¯
¯
5
1 ¯ = 0,
5
2 ¯ = 0,
¯ 0
¯ 0
¯ −3 −1 −2 ¯
¯ −3 −1 −1 ¯
las columnas 3a , 4a y 5a .
¯
¯
¯ −1
3 2¯
¯
¯
5 3 ¯ = 0.
¯ 0
¯ −3 −1 0 ¯
Todos los menores de orden 3 obtenidos orlando la 3a fila son cero, lo cual
significa que la 3a fila es combinación lineal de la 1a y 2a filas y, por tanto, puede
suprimirse.
4) Continuamos formando determinantes de orden 3 orlando ahora la 4a fila con las
columnas 3a , 4a y 5a .
¯
¯
¯
¯
¯
¯
¯ −1 3 2 ¯
¯ −1 3 1 ¯
¯ −1 3 0 ¯
¯
¯
¯
¯
¯
¯
¯ 0 5 3 ¯ = 0.
¯ 0 5 2 ¯ = 0,
¯ 0 5 1 ¯ = 0,
¯ 3 11 6 ¯
¯ 3 11 5 ¯
¯ 3 11 4 ¯
De nuevo todos los menores obtenidos orlando la 4a fila son cero, lo cual significa
que también la 4a fila es combinación lineal de la 1a y 2a filas y, por tanto, puede
suprimirse.
En consecuencia, se concluye que rango(A) = 2.
Para concluir esta sección, indicaremos que el rango del producto de dos matrices
es menor o igual que el mı́nimo del rango de las dos matrices.
18
1.5
EJERCICIOS PROPUESTOS EN EXÁMENES ANTERIORES
EJERCICIOS PROPUESTOS EN EXÁMENES ANTERIORES
1.- Calcular el determinante de la matriz cuadrada de orden n, A = (aij ), cuyos
elementos vienen dados por
aij = i + j − 1, i, j = 1, 2, . . . , n.
2.- Dada la matriz
0
A = 13 0 0
0 0 13
0
1
3
calcular S = I + A + A2 + A3 + · · · + An .
3.- Obtener el valor de x para que se cumpla que
¯
¯
¯ 1
¯
1
1
1
¯
¯
π
¯ sen 0 sen 6 −1 −x ¯
¯
¯ = 0.
¯ sen2 0 sen2 π 1
x2 ¯¯
¯
6
¯ sen3 0 sen3 π −1 −x3 ¯
6
4.- Sabiendo que a 6= −1, obtener el valor de x en la siguiente ecuación:
¯
¯
¯ 7a + 7 a + 1 a + 1 a + 1 ¯
¯
¯
−1
1
−1 ¯
¯ 7
¯ 7
2
4
8 ¯¯ = 0.
¯
2
¯ 7
x
x
x3 ¯
5.- Sabiendo que
1 −1 0
0
0
1
0 1 −1 0
0
0
1 −1 0 y A−1 = 0
A = 0 0
0 0
0
0
1 −1
0 0
0
0
1
0
calcular la inversa de la matriz
2 −1 0
0
0
−1 2 −1 0
0
B = 0 −1 2 −1 0
0
0 −1 2 −1
0
0
0 −1 1
sabiendo que B = A.A> .
6.- Calcular a, b, c, d ∈ R para que
2
µ
1
1
0
0
0
1
1
1
0
0
¶
1 2
,
0 −1
A − (a + d)A + (ad − bc)I + A =
µ
¶
a b
siendo A =
.
c d
7.- Resolver la ecuación
¯
¯
¯a
−1
1
−1 ¯
¯
¯
a
a2
a3 ¯
¯a
= 0.
¯a
−b
b2
−b3 ¯¯
¯
¯ a (a − b) (a − b)2 (a − b)3 ¯
1
1
1
1
0
1
1
1 ,
1
1
2
ESPACIOS VECTORIALES.
Los espacios vectoriales constituyen una de las estructuras algebraicas más
importantes en Matemáticas. La mayorı́a de los objetos matemáticos que
usamos habitualmente: vectores, matrices, polinomios, funciones, ... tienen
estructura de espacio vectorial.
2.1
DEFINICIÓN Y EJEMPLOS
Sea V un conjunto, cuyos elementos llamaremos vectores y notaremos por ~u, ~v , · · · ,
en el que tenemos definidas dos operaciones: la operación ‘+’ que llamaremos suma
de vectores y la operación ‘·’ que llamaremos producto a izquierda por un número
real . Diremos que (V, +, ·) es un espacio vectorial real si se cumple que:
1.- La suma de vectores es una operación interna en V, es decir, si ~v , w
~ ∈ V,
entonces ~v + w
~ ∈ V, verificando las siguientes propiedades:
a1) Conmutativa: ∀~u, ~v ∈ V, ~u + ~v = ~v + ~u.
a2) Asociativa: ∀~u, ~v , w
~ ∈ V, (~u + ~v ) + w
~ = ~u + (~v + w).
~
a3) Existencia de elemento neutro: Existe un vector, ~0 ∈ V, que llamaremos
vector nulo tal que ~v + ~0 = ~v , para todo ~v ∈ V .
a4) Existencia de elemento opuesto: Para cada vector ~v ∈ V existe otro vector ~v 0 ∈ V, que llamaremos vector opuesto de ~v , tal que ~v + ~v 0 = ~0.
19
20
DEFINICIÓN Y EJEMPLOS
2.- La operación de multiplicación a izquierda por un número real es una operación
externa sobre V, es decir, si λ ∈ R y ~v ∈ V, entonces λ · ~v ∈ V, verificando las
siguientes propiedades:
b1) Distributiva respecto a la suma de números reales: ∀ λ, µ ∈ R y ∀ ~v ∈ V,
(λ + µ) · ~v = λ · ~v + µ · ~v .
b2) Distributiva respecto a la suma de vectores:∀ λ, µ ∈ R, ∀~u, ~v ∈ V,
λ · (~u + ~v ) = λ · ~v + µ · ~v .
b3) Pseudoasociativa: ∀ λ, µ ∈ R, ∀ ~v ∈ V, (λ µ) · ~v = λ · (µ · ~v ).
b4) Elemento unidad: ∀ v ∈ V, 1 · ~v = ~v .
En lo que sigue, para simplificar la notación, el producto de un número real λ por
un vector ~v ∈ V también lo notaremos simplemente por λ ~v .
- Ejemplo 2.1
• El conjunto de vectores del plano es un espacio vectorial. Geométricamente un vector
del plano viene representado mediante un segmento orientado. Algebraicamente, un
vector ~u del plano viene dado por un par de números reales ~u = (u1 , u2 ) que se
denominan coordenadas del vector. El conjunto de vectores del plano se identifica
con el conjunto
R2 = R × R = {~x = (x1 , x2 ) : x1 , x2 ∈ R},
en el que se definen las operaciones usuales de suma de vectores y multiplicación por
un número real dadas por
~x + ~y = (x1 , x2 ) + (y1 , y2 ) = (x1 + y1 , x2 + y2 ),
λ ~x = λ (x1 , x2 ) = (λ x1 , λ x2 ).
(2.1.1)
Entonces (R2 , +, ·) es un espacio vectorial real.
• El conjunto P2 [x] de los polinomios grado menor o igual que 2 en la variable x,
es decir, expresiones de la forma p(x) = a0 + a1 x + a2 x2 con a0 , a1 , a2 ∈ R, tiene
estructura de espacio vectorial con las operaciones algebraicas usuales:
p(x) + q(x) = (a0 + a1 x + a2 x2 ) + (b0 + b1 x + b2 x2 )
= (a0 + b0 ) + (a1 + b1 )x + (a2 + b2 )x2 .
λ · p(x) = λ(a0 + a1 x + a2 x2 ) = (λa0 ) + (λa1 ) + (λa2 )x2 .
En general, el conjunto Pn [x] (polinomios de grado menor o igual que n en la variable
x con las operaciones usuales) tiene estructura de espacio vectorial).
• El conjunto de matrices cuadradas reales de orden 2 que notaremos por M2×2 (R)
tiene estructura de espacio vectorial. Las operaciones de suma y producto por
escalares vienen dadas por:
µ
¶ µ
¶ µ
¶
a11 a12
b11 b12
a11 + b11 a12 + b12
A+B =
+
=
.
a21 a22
b21 b22
a21 + b21 a22 + b22
µ
¶ µ
¶
a11 a12
λ a11 λ a12
λ·A=λ·
=
a21 a22
λ a21 λ a22
ESPACIOS VECTORIALES.
21
En general, el conjunto Mm×n (R), de las matrices reales com m filas y n columnas
y las operaciones usuales de suma de matrices y multiplicación de una matriz por
un número real, es un espacio vectorial.
• El espacio de las funciones f : R → R es un espacio vectorial con las operaciones
usuales:
(f + g)(t) = f (t) + g(t),
(λ f )(t) = (λ · f )(t) = λ f (t),
t ∈ A.
+ Propiedad 2.1.1 En un espacio vectorial (V, +, ·) se satisfacen las identidades
siguientes:
p1) 0 · ~v = ~0,
p2) ~v + (−1)~v = ~0,
p3) λ · ~0 = ~0.
para todo ~v ∈ V y λ ∈ R.
Observemos que la propiedad p2) nos indica que el vector opuesto de un vector ~v
es precisamente el vector (−1)~v . En lo sucesivo notaremos a este vector por −~v .
Asimismo, definiremos la operación de restar dos vectores en la forma
~u − ~v = ~u + (−~v ).
- Ejercicio 2.2
• Escribe el vector nulo en cada uno de los espacios vectoriales del Ejemplo 1.1.
• Da un ejemplo concreto de un vector en cada uno de los espacios vectoriales del
Ejemplo 1.1 y escribe su vector opuesto.
2.1.1
El espacio vectorial Rn
La estructura de espacio vectorial definida sobre R2 puede extenderse fácilmente a
Rn , conjunto de vectores de n coordenadas,
Rn = {~x = (x1 , x2 , . . . , xn ) : xi ∈ R, i = 1, 2, . . . , n},
definiendo las operaciones
~x + ~y = (x1 , x2 , . . . xn ) + (y1 , y2 , . . . , xn ) = (x1 + y1 , x2 + y2 , . . . , xn + yn ),
λ · ~x = λ (x1 , x2 , . . . xn ) = (λ x1 , λ x2 , . . . λ xn ).
- Ejemplo 2.3
• El espacio R3 (vectores de 3 coordenadas) se identifica con el conjunto de los vectores
en el espacio tridimensional.
22
DEFINICIÓN Y EJEMPLOS
Observaciones:
• Aunque hemos denotado a los elementos de Rn como vectores fila de orden
n, en ocasiones, puede resultar más ventajoso utilizar la notación de vectores
columna de orden n,
x1
x2
~x =
... .
xn
En este caso, las operaciones definidas anteriormente vendrán dadas por
x1
y1
x1 + y 1
x1
λ x1
x2 y 2 x2 + y 2
x λ x
, λ · .2 = . 2 . (2.1.2)
~x + ~y =
..
... + ... =
.. ..
.
xn
yn
xn + y n
xn
λ xn
• Por otra parte, si ~x = (x1 , x2 , · · · , xn ) es un vector fila en Rn , también podemos utilizar la operación de transposición de matrices, para denotar por xt =
(x1 , x2 , · · · , xn )t , al correspondiente vector columna en Rn .
x1
x2
~x = (x1 , x2 , . . . , xn ) ⇒ ~xt =
... .
xn
• En lo que sigue utilizaremos indistintamente ambas notaciones, si bien, cuando
sea necesario, distinguiremos entre vectores fila y vectores columna.
2.1.2
Subespacios vectoriales
Sea (V, +, ·) un espacio vectorial real y sea S un subconjunto no vacı́o de V. Diremos
que S es un subespacio vectorial de V si (S, +, ·) tiene estructura de espacio vectorial
con las operaciones ‘+’ y ‘·’ definidas en V.
Notemos que el hecho de que (V, +, ·) sea un espacio vectorial real y que S ⊂ V,
simplifica mucho las cosas a la hora de probar que (S, +, ·) tiene o no estructura de
espacio vectorial.
+ Resultado 2.1.1 Sea (V, +, ·) un espacio vectorial real y S un subconjunto no
vacı́o de V. Entonces S es un subespacio vectorial de V si, y sólo si,
i) ∀ ~u, ~v ∈ S ⇒ ~u + ~v ∈ S,
ii) ∀ λ ∈ R, ∀ ~v ∈ S ⇒ λ ~v ∈ S.
ESPACIOS VECTORIALES.
23
- Ejemplo 2.4
• El conjunto S de las matrices cuadradas de orden 2 de la forma
µ
¶
0 a
b c
es un subespacio vectorial de M2×2 (R).
Solución: Hemos de comprobar que se cumplen las condiciones i) y ii) del Resultado 2.1.1.
i) Tomemos dos matrices A, B ∈ S y veamos que A + B ∈ S.
µ
¶
µ
¶
0 a
0 a0
A=
, B=
,
b c
b0 c0
¶ µ
¶ µ
¶
µ
0 a0
0
a + a0
0 a
+
=
∈ S.
A+B =
b c
b0 c0
b + b0 c + c0
1.- Tomemos λ ∈ R y A ∈ S y probemos que λ · A ∈ S.
µ
¶ µ
¶
0 a
0 λa
λ·A=λ·
=
∈ S.
b c
λb λc
- Ejercicio 2.5
• Indica si los siguientes conjuntos son subespacios vectoriales:
1) El conjunto de funciones trigonométricas de la forma
x(t) = a0 + a1 cos t + b1 sen t, a0 , a1 , b1 ∈ R.
2) El conjunto de matrices cuadradas de orden 2 cuya traza es 0 con las operaciones
usuales.
3) El conjunto de vectores del plano cuyas coordenadas suman 1, con las operaciones
usuales.
4) El conjunto de polinomios de grado menor o igual que 2 que se anulan en el
punto x = 1, con las operaciones usuales.
2.2
COMBINACIÓN LINEAL DE VECTORES
+ Definición 1 Sea V un espacio vectorial. Se dice que el vector ~v es combinación
lineal de los vectores {~v1 , ~v2 , . . . , ~vk } ⊂ V, si puede escribirse en la forma
~v = λ1~v1 + λ2~v2 + · · · + λk~vk .
- Ejemplo 2.1
• El vector ~v = (4, −5, −2) de R3 es combinación lineal de los vectores ~v1 = (1, 1, 1) y
~v2 = (2, −1, 0), dado que
~v = −2~v1 + 3~v2 .
• Para saber si el vector ~v = (3, 0, −5) es combinación lineal de los vectores ~v1 y ~v2
anteriores, planteamos la igualdad
~v = λ · ~v1 + µ · ~v2 ⇒ (3, 0, −5) = λ(1, 1, 1) + µ(2, −1, 0)
24
COMBINACIÓN LINEAL DE VECTORES
que conduce al sistema
(
λ + 2µ =
3
λ−µ =
0
λ = −5
Dado que el sistema anterior es incompatible (no tiene solución) concluimos que el
vector ~v no es combinación lineal de los vectores ~v1 y ~v2 .
µ
¶
3 1
• En M2×2 (R), para averiguar si la matriz A =
es combinación lineal de
−6 4
las matrices
¶
¶
µ
µ
1 −1
3 −1
,
A2 =
,
A1 =
2
0
0
2
planteamos la igualdad
A = λ · A1 + µ · A2 ⇒
que conduce al sistema
µ
3 1
−6 4
¶
λ + 3µ
λ−µ
2λ
2µ
µ
=λ
1 −1
2
0
¶
µ
+µ
3 −1
0
2
¶
=
3
=
0
= −6
=
4
de donde se obtiene λ = −3, µ = 2. Por tanto, la matriz A es combinación lineal de
las matrices A1 y A2 ya que
A = −3A1 + 2A2 .
- Ejercicio 2.2
• Determina si el polinomio p(x) = −1 − 6x2 + 19x − x3 es combinación lineal de los
polinomios p1 (x) = 1 + 3x − x3 , p2 (x) = 2 − 3x + x2 , p3 (x) = 4x − 4x2 + 2x3 .
• Determina si el vector v = (1, 0, −1, 4) de R4 es combinación lineal de los vectores
~v1 = (1, 1, 0, 1) y ~v2 = (2, 1, −1, 1).
µ
¶
3 1 0
• En M2×3 (R), determina si la matriz A =
es combinación lineal de
−6 4 2
las matrices
µ
¶
µ
¶
µ
¶
1 −1
0
3 −1 −1
0 0 −1
A1 =
, A2 =
, A3 =
.
2
0 −1
0
0
2
1 0
2
2.2.1
Dependencia e independencia lineal de vectores
+ Definición 2 Un conjunto de vectores S = {~v1 , v~2 , . . . , ~vk } de un espacio vectorial V se dice que es linealmente independiente, si ninguno de los vectores de S
puede escribirse como combinación lineal de los restantes vectores de S. En caso
contrario, se dice que es un conjunto de vectores linealmente dependiente.
ESPACIOS VECTORIALES.
25
- Ejemplo 2.3
• El conjunto S = {(−2, 1), (1, 0)} de R2 es linealmente independiente, ya que ninguno
de ellos puede ponerse como combinación lineal del otro.
• El conjunto de vectores S = {(4, −5, −2), (1, 1, 1), (2, −1, 0)} de R3 es linealmente
dependiente dado que el primer vector puede escribirse como combinación lineal de
los restantes:
(4, −5, −2) = −2(1, 1, 1) + 3(2, −1, 0).
+ Propiedad 2.2.1 Un conjunto de vectores S = {~v1 , v~2 , . . . , ~vk } es linealmente
independiente si se cumple que
λ1~v1 + λ2~v2 + · · · + λk~vk = ~0 ⇒ λ1 = λ2 = · · · = λk = 0,
es decir, si la única forma de escribir el vector nulo como combinación lineal de
los vectores de S es que todos los coeficientes sean nulos.
La propiedad anterior también puede enunciarse de esta otra forma:
+ Propiedad 2.2.2 Un conjunto de vectores S = {~v1 , v~2 , . . . , ~vk } es linealmente
dependiente si es posible expresar el vector nulo como combinación lineal de ellos
con al menos un coeficiente no nulo. Dicho en términos matemáticos, es posible
encontrar números λ1 , λ2 , · · · , λk no todos nulos, de forma que
λ1~v1 + λ2~v2 + · · · + λk~vk = ~0
- Ejemplo 2.4
• Para determinar si el conjunto de vectores S = {(−2, 1), (1, 0)} de R2 es linealmente
independiente planteamos la igualdad
λ(2, −1) + µ(1, 0) = (0, 0),
que conduce al sistema
½
2λ + µ = 0
−λ = 0
cuya única solución es λ = µ = 0. Por tanto, deducimos que el conjunto S es
linealmente independiente.
• Para determinar si el conjunto de vectores S = {(4, −5, −2), (1, 1, 1), (2, −1, 0)} de
R3 es linealmente independiente planteamos la igualdad
α(4, −5, −2) + β(1, 1, 1) + γ(2, −1, 0) = (0, 0, 0).
que conduce al sistema
(
4α + β + 2γ
−5α + β − γ
−2α + β
que admite soluciones distintas de la trivial:
(
α=t
β = 2t ,
γ = −3t
= 0
= 0
= 0
t ∈ R.
(2.2.1)
26
COMBINACIÓN LINEAL DE VECTORES
Tomando, por ejemplo, t = 1, obtenemos la solución particular α = 1, β = 2,
γ = −3, por lo que la igualdad (2.2.1) nos asegura que es posible expresar el vector
nulo como una combinación lineal de los vectores de S con coeficientes no nulos.
En el caso particular de que trabajemos con vectores de Rn , podemos aplicar el
siguiente resultado para determinar si son linealmente independientes:
+ Resultado 2.2.1 El conjunto de vectores S = {~v1 , ~v2 , . . . , ~vk } de Rn es linealmente independiente si, y solo si,
rango (~v1 | ~v2 | . . . | ~vk ) = k.
- Ejemplo 2.5
• El conjunto de vectores S = {(−2, 1), (1, 0)} de R2 es linealmente independiente ya
que
¯
¯
¯ −2 1 ¯
¯
¯
¯ 1 0 ¯ 6= 0.
• Para determinar si el conjunto de vectores S = {(4, −5, −2, 4), (1, 1, 1, 1), (2, −1, 0, 2)}
de R4 es linealmente independiente calculamos el rango de la matriz
Ã
A=
4 −5 −2 4
1
1
1 1
2 −1
0 2
!
.
1) En primer lugar observamos que la 4a columna es igual que la 1a por lo que
puede suprimirse, es decir,
Ã
rango
4 −5 −2 4
1
1
1 1
2 −1
0 2
!
Ã
= rango
4 −5 −2
1
1
1
2 −1
0
!
.
2) Por otra parte,
¯
¯
¯ 4 −5 ¯
¯ = 9 6= 0,
¯
¯1
1¯
¯
¯
¯ 4 −5 −2 ¯
¯
¯
1
1 ¯ = 0,
¯1
¯ 2 −1
0¯
de donde se concluye que rango(A) = 2 y por tanto, el conjunto de vectores S es
linealmente dependiente.
ESPACIOS VECTORIALES.
27
+ Propiedad 2.2.3 En un espacio vectorial V se cumplen las siguientes
propiedades:
1) El conjunto S = {~v } formado por un sólo vector es linealmente dependiente
si, y solamente si, ~v = ~0.
2) Si ~0 ∈ S, entonces S es un conjunto linealmente dependiente.
3) El conjunto S = {~u, ~v } es linealmente dependiente si, y solamente si, ~v = λ~u
(vectores proporcionales).
4) Si S es un conjunto linealmente independiente y S 0 ⊂ S, entonces S 0 es linealmente independiente.
5) Si S es un conjunto linealmente dependiente y S ⊂ S 0 , entonces S 0 es linealmente dependiente.
2.2.2
Subespacio vectorial generado por un conjunto de vectores
Sea S = {~v1 , ~v2 , . . . , ~vn } un conjunto de vectores de un espacio vectorial V. El
conjunto L(S) de todos los vectores que se pueden obtener como combinación lineal
de los vectores de S es subespacio vectorial de V que se llama subespacio vectorial
generado por S y se representa por
L(S) = h~v1 , ~v2 , . . . , ~vn i .
El conjunto S se llama sistema de generadores de L(S).
Un vector ~x ∈ L(S) si se puede expresar como combinación lineal de los vectores de
S, es decir, si ~x se puede escribir en la forma
~x = λ1~v1 + λ2~v2 + · · · + λn~vn ,
λ1 , λ2 , . . . , λn ∈ R.
- Ejemplo 2.6
• Sea S = {~u, ~v } un conjunto de vectores de R4 con ~u = (1, −1, 1, 2) y ~v = (1, 3, −2, 1).
El subespacio vectorial L(S) viene dado por el conjunto de vectores ~x ∈ R4 tales
que
~x = λ ~u + µ ~v , con λ, µ ∈ R.
Si tomamos ~x = (x1 , x2 , x3 , x4 ), la igualdad anterior se escribe como
(x1 , x2 , x3 , x4 ) = λ(1, −1, 1, 2) + µ(1, 3, −2, 1),
λ, µ ∈ R.
La igualdad anterior se denomina ecuación vectorial de L(S).
De la ecuación anterior se obtienen las igualdades
x =λ+µ
1
x2 = −λ + 3µ
,
λ, µ ∈ R.
x3 = λ − 2µ
x4 = 2λ + µ
Los números λ, µ son números reales arbitrarios que reciben el nombre de parámetros.
De ahı́ que a las ecuaciones anteriores se denominen ecuaciones paramétricas de
L(S).
Las ecuaciones paramétricas son útiles para obtener vectores que pertenezcan a
L(S). Para ello basta darle valores concretos a los parámetros λ y µ. Por ejemplo,
para λ = 1 y µ = 1, se obtiene el vector ~x = (2, 2, −1, 3) ∈ L(S).
28
COMBINACIÓN LINEAL DE VECTORES
Si despejamos (por ejemplo) λ en la primera igualdad λ = x1 − µ y sustituimos en
las restantes ecuaciones se obtiene
(
(
x2 = −x1 + 4µ
x2 = −(x1 − µ) + 3µ
x3 = x1 − 3µ
x3 = (x1 − µ) − 2µ
⇒
x4 = 2(x1 − µ) + µ
x4 = 2x1 − µ
Si ahora repetimos lo mismo con el parámetro µ (lo despejamos en la última ecuación
porque es más fácil), µ = 2x1 − x4 , y sustituimos en las restantes ecuaciones, se
obtiene
½
½
x2 = −x1 + 4(2x1 − x4 )
7x1 − x2 − 4x4 = 0
⇒
x3 = x1 − 3(2x1 − x4 )
5x1 + x3 − 3x4 = 0
Se obtienen 2 ecuaciones donde no intervienen los parámetros λ, µ. Estas ecuaciones
se denominan ecuaciones cartesianas o ecuaciones implı́citas de L(S).
Las ecuaciones cartesianas de L(S) son útiles para comprobar si un determinado
vector pertenece o no a L(S). Por ejemplo, el vector (2, −1, 3, 4) no pertenece a
L(S) ya que no se cumplen las dos ecuaciones paramétricas.
7x1 − x2 − 4x4 = 7(2) − (−1) − 4(4) = −2 6= 0.
El vector (3, 1, 0, 5) ∈ L(S) ya que
7x1 − x2 − 4x4 = 7(3) − (1) − 4(5) = 0,
5x1 + x3 − 3x4 = 5(3) + (0) − 3(5) = 0.
• Sea M el subespacio vectorial de R3 dado por las ecuaciones paramétricas
(
x1 = µ
x2 = λ − µ ,
λ, µ ∈ R.
x3 = λ + 2µ
Para determinar un sistema de generadores de M podemos escribir las ecuaciones
paramétricas en la forma
Ã
!
à !
Ã
!
x1
0
1
x2
= λ 1 + µ −1 .
x3
1
2
Entonces resulta que S = {(0, 1, 1), (1, −1, 2)} es un sistema de generadores de L, es
decir, podemos escribir
M = L(S) = h(0, 1, 1), (1, −1, 2)i
• Sea L el subespacio vectorial de R5 determinado por las ecuaciones cartesianas
½
x1 − 2x3 + x5 = 0
x1 + 2x2 − 3x3 + x4 = 0
Para determinar un sistema de generadores de L resolvemos el sistema dado por las
ecuaciones cartesianas.
ESPACIOS VECTORIALES.
29
+ Propiedad 2.2.4 Sean S = {~v1 , ~v2 , . . . , ~vn } y S 0 = {~v1 , ~v2 , . . . , ~vn , w}.
~ Si w
~ es
combinación lineal de ~v1 , ~v2 , . . . , ~vn , entonces se cumple que:
L(S) = L(S 0 ),
es decir, los subespacios vectoriales generados por S y S 0 son el mismo.
2.3
BASES Y DIMENSIÓN
+ Definición 3 Sea V un espacio vectorial y L un subespacio vectorial de V. Se
dice que L es finitamente generado si existe un conjunto de vectores S = {~v1 , ~v2 , . . . , ~vn }
de V de forma que
L = L(S) = h~v1 , ~v2 , . . . , ~vn i.
El conjunto S se dice que es un sistema de generadores del subespacio L. Si además,
S es un conjunto de vectores linealmente independientes entonces se dice que S es
una base del subespacio vectorial L.
La propiedad 2.2.4 nos dice que si S es un sistema de generadores de L y eliminamos aquellos vectores de S que sean combinación lineal de los restantes, entonces
seguimos teniendo un sistema de generadores de L. De esta forma siempre será
posible obtener un sistema de generadores que además sea linelmente independiente
y, en definitiva, siempre será posible obtener una base de un subespacio vectorial
finitamente generado.
- Ejemplo 2.7
• Los vectores {(1, 0), (0, 1)} forman un base de R2 .
• Sea S el subespacio vectorial de R3 generado por los vectores
~v1 = (1, 1, 1, 1),
~v2 = (2, −1, 0, 1),
~v3 = (0, 3, 2, 1).
El conjunto {~v1 , ~v2 , ~v3 } es un sistema de generadores de S, sin embargo no es una
base de S dado que no son linealmente independientes al ser ~v3 combinación lineal
de ~v1 y v~2 ,
~v3 = 2~v1 − ~v2 .
Ahora bien, teniendo en cuenta que
® ­
®
­
S = ~v1 , ~v2 , ~v3 = ~v1 , ~v2 ,
donde ahora los vectores ~v1 y ~v2 son linealmente independientes. Por tanto, podemos
concluir diciendo que {~v1 , ~v2 } es una base de S.
+ Propiedad 2.3.1 Un conjunto de vectores B = {~v1 , ~v2 , . . . , ~vn } es una base de
un espacio vectorial V si, y sólo si, cualquier vector de V se expresa de forma única
como combinación de los vectores de B.
Sea B = {~v1 , ~v2 , . . . , ~vn } una base de V. Por la Propiedad 2.3.1, cualquier vector
~v ∈ V puede escribirse como combinación lineal única de los vectores de B, es decir,
~v = λ1 ~v1 + λ2 ~v2 + λk ~vk ,
30
BASES Y DIMENSIÓN
donde λ1 , λ2 , . . . , λk , son números reales unı́vocamente determinados.
Los números reales λ1 , λ2 , . . . , λk se denominan coordenadas del vector ~v respecto de
la base B.
2.3.1
Base canónica de Rn
Como sabemos el conjunto B = {(1, 0), (0, 1)} es una base de R2 . Dicha base recibe
el nombre de base canónica de R2 y es la que suele utilizarse para estudiar los
problemas de geometrı́a en el plano. Cualquier vector de R2 viene determinado de
forma única como combinación lineal de los vectores de B. Más concretamente,
cualquier (x, y) ∈ R2 , puede escribirse como
(x, y) = x(1, 0) + y(0, 1).
Los números x e y se denominan coordenadas del vector (x, y).
En general, el conjunto B = {~e1 , ~e2 , · · · , ~en } de vectores de Rn , definidos por
i
|{z}
~ei = (0, 0, . . . , 1 , 0, . . . , 0),
para i = 1, 2, · · · , n, determinan una base de Rn que se denomina base canónica de
Rn . Cualquier vector ~x = (x1 , x2 , . . . , xn ) ∈ Rn se escribe como
~x = x1~e1 + x2~e2 + · · · + xn~en .
2.3.2
Dimensión de un espacio vectorial
Un espacio vectorial V no tiene una base única. Ası́, por ejemplo, los conjuntos
B = {(1, 0), (0, 1)} y B 0 = {(1, 1), (0, 1)} son bases de R2 (De hecho, una base de
R2 estará formada por dos vectores cualesquiera ~v1 y ~v2 , no nulos, que no sean
proporcionales; geométricamente significarı́a que tienen distinta dirección).
Sin embargo, todas las bases de un espacio vectorial V tienen algo en común: el
mismo número de vectores. A tal número se le llamará dimensión del espacio vectorial V, y lo denotaremos mediante dim(V ).
- Ejemplo 2.8
• Dado que la base canónica de Rn tiene n vectores, podemos asegurar que cualquier
base de Rn tendrá n vectores y que, por tanto, dim(Rn ) = n. .
• El conjunto de polinomios {1, x, x2 , x3 , . . . , xn } forman una base de Pn [x], por lo que
dim(Pn [x]) = n + 1.
• Las matrices
µ
1 0
0 0
¶ µ
¶ µ
¶ µ
¶
0 1
0 0
0 0
,
,
,
0 0
1 0
0 1
forman una base de M2 (R), por lo que dim (M2×2 (R)) = 4.
En general, se cumple que dim (Mm×m (R)) = m n.
ESPACIOS VECTORIALES.
31
El siguiente resultado nos permite decidir cuando un conjunto de n vectores de Rn
forman una base de Rn .
+ Resultado 2.3.1 Un conjunto B = {~v1 , ~v2 , . . . , ~vn } de vectores de Rn es una
base de R si, y sólo si,
det (~v1 | ~v2 | . . . | ~vn ) 6= 0.
- Ejemplo 2.9
• Los vectores ~v1 = (1, 0, 1), ~v2 = (0, −1, 3) y ~v3 = (3, 1, 1) forman una base de R3 ,
¯
¯
dado que
¯1
0 3¯
¯
¯
det (~v1 | ~v2 | ~v3 ) = ¯ 0 −1 1 ¯ = −1 6= 0.
¯1
3 1¯
• Los vectores ~v1 = (1, 2), ~v2 = (−2, −4) no¯ son una ¯base de R2 , dado que
¯ 1 −2 ¯
¯ = 0.
det (~v1 | ~v2 ) = ¯¯
−2
4¯
El resultado anterior puede establecerse de manera más general como sigue,
­
®
+ Resultado 2.3.2 Sea S = ~v1 , ~v2 , . . . , ~vk , donde ~v1 , ~v2 , . . . , ~vk ∈ Rn . Entonces se cumple que
dim(S) = rango (~v1 | ~v2 | . . . | ~vk ) .
- Ejemplo 2.10
• Sea S el subespacio vectorial de R4 , generado por los vectores,
~v1 = (1, 1, 1, 1) , ~v2 = (2, −1, 0, 1) y ~v3 = (0, 3, 2, 1) .
Ã
!
1
1 1 1
Entonces, dim(S) = rango (~v1 | ~v2 | ~v3 ) = rango 2 −1 0 1 = 2.
0
3 2 1
2.3.3
Cambio de base en un espacio vectorial
Sea V un espacio vectorial de dimensión n y supongamos que tenemos dos bases
B = {~u1 , ~u2 , . . . , ~un } y B 0 = {~v1 , ~v2 , . . . , ~vn }. Como sabemos, cualquier vector ~x de
V podrá escribirse de forma única como combinación lineal de los vectores de B y
de B 0 .
Respecto de la base B, el vector ~x tendrá unas coordenadas (x1 , x2 , . . . , xn ), es decir,
se podrá expresar en la forma
~u1
~u2
(2.3.1)
~x = x1~u1 + x2~u2 + · · · + xn~un = (x1 , x2 , . . . , xn )
... .
~un
32
BASES Y DIMENSIÓN
Análogamente, el vector ~x tendrá unas coordenadas (x01 , x02 , . . . , x0n ) respecto de la
base B 0 , es decir,
~v1
~v2
~x = x01~v1 + x02~v2 + · · · + x0n~vn = (x01 , x02 , . . . , x0n )
(2.3.2)
... .
~vn
¿Qué relación existe entre (x1 , x2 , . . . , xn ) y (x01 , x02 , . . . , x0n )?
A partir de (2.3.1) y (2.3.2) obtenemos la igualdad en forma matricial
~v1
~u1
~u2
~v
0
0
0 2
(x1 , x2 , . . . , xn )
... = (x1 , x2 , . . . , xn ) ...
~vn
~un
(2.3.3)
que se llama ecuación general del cambio de base. La ecuación (2.3.3) puede escribirse abreviadamente en la forma
(x1 , x2 , . . . , xn )B = (x01 , x02 , . . . , x0n )B 0 ,
(2.3.4)
donde B y B 0 son las matrices cuyos vectores fila son las coordenadas de los vectores
de las bases B y B 0 respectivamente. Dado que B y B 0 son bases, entonces necesariamente las matrices B y B 0 son regulares (su determinantes es distinto de cero) y,
por tanto, existen sus matrices inversas B −1 y (B 0 )−1 .
La ecuación (2.3.3) nos permite conocer las coordenadas (x01 , x02 , . . . , x0n ) respecto de
B 0 conocidas las coordenadas (x1 , x2 , . . . , xn ) respecto de B o viceversa, mediante las
igualdades
(x01 , x02 , . . . , x0n ) = (x1 , x2 , . . . , xn )B(B 0 )−1 ,
(x1 , x2 , . . . , xn ) = (x01 , x02 , . . . , x0n )B 0 B −1 .
- Ejemplo 2.11
• En R2 se consideran la base canónica B = {(1, 0), (0, 1)} y la base B0 = {(2, −1), (3, 0)}.
La ecuación general del cambio de base vendrá dada por
µ
¶
µ
¶
1 0
2 −1
0
0
(x1 , x2 )
= (x1 , x2 )
.
0 1
3
0
Si el vector ~x = (1, −5) respecto de la base B para determinar sus coordenadas
respecto de la base B0 utilizamos la igualdad
µ
¶
µ
¶
1 0
2 −1
0
0
(1, −5)
= (x1 , x2 )
,
0 1
3
0
de donde se obtiene que
µ
¶µ
¶−1
µ
0
1 0
2 −1
(x01 , x02 ) = (1, −5)
= (1, −5)
0 1
3
0
−1
luego ~x = (13, −1) respecto de B 0 .
1
3
2
3
¶
= (13, −1),
ESPACIOS VECTORIALES.
33
- Ejercicio 2.12
• Si ~x = (1, 2, −1) respecto de la base B = {(1, 1, 0), (0, 1, 1), (1, 0, 1)}, hallar las coordenadas del vector ~x respecto de la base canónica de R3 .
• Sean B = {~u1 , ~u2 , u~3 } y B = {~v1 , v~2 , ~v3 } dos bases de R3 , tales que ~v1 = ~u2 + ~u3 ,
~v2 = u~1 + ~u3 y ~v3 = ~u1 + ~u2 . Hallar las ecuaciones del cambio de la base B a B 0 y
de la base B0 a B.
• Dadas las bases de R3 , B = {~u1 = (2, 1, 0), ~u2 = (−1, 0, 1), ~u3 = (0, 1, −2)} y B 0 =
{~v1 = (0, 1, 1), ~v2 = (1, 0, 0), ~v3 = (2, 0, 1)}.
a) Hallar la expresión analı́tica del cambio de base de B a B 0 , de B 0 a B y de B 0 a
la base canónica.
b) Si ~a = (1, 1, 1) respecto de B, ¿cuáles son sus coordenadas respecto de B 0 .?
c) Si ~b = ~v1 − ~v2 , escribir la expresión de ~b respecto de B.
2.4
SUMA E INTERSECCIÓN DE SUBESPACIOS
2.4.1
Suma de subespacios
+ Definición 4 Sea V un espacio vectorial y L y M dos subespacios vectoriales
de V. Se define el conjunto
L + M = {w
~ :w
~ = ~u + ~v con u ∈ L, v ∈ M },
es decir, un vector w
~ ∈ L + M si se puede escribir como suma de un vector de L y
un vector de M .
El conjunto L + M es un subespacio vectorial de V que llamaremos subespacio vectorial suma de L y M .
Si conocemos un sistema de generadores de los espacios L y M , entonces es muy
fácil determinar cuál es el subespacio L + M .
+ Propiedad 2.4.1 Si L = L(S) y M = L(S 0 ), entonces L + M = L(S ∪ S 0 ).
- Ejemplo 2.13
• Consideremos los subespacios vectoriales de R4 dados por
½
2x2 − x3 = 0
L = h(1, 2, 3, 4), (−1, 1, 2, 1)i,
M=
.
x1 + x4 = 0
Para determinar el subespacio L + M necesitamos conocer un sitema de generadores
de L y de M . En nuestro caso, sólo hemos de determinar un sistema de generadores
de M . Para ello resolvemos el sistema dado por las ecuaciones cartesianas de M .
x1 = −x4
x = −µ
½
½
1
2x2 − x3 = 0
x1 = −x4
x2 = λ
x2 = λ
⇒
⇒
⇒
x3 = 2x2
x1 + x4 = 0
x
=
2x
2
3
x3 = 2λ
x4 = µ
x4 = µ
x1
−1
0
x2
0
1
⇒ = λ
+ µ .
x3
0
2
x4
1
0
34
SUMA E INTERSECCIÓN DE SUBESPACIOS
Luego M = h(−1, 0, 0, 1), (0, 1, 2, 0)i y, por tanto,
L + M = h(1, 2, 3, 4), (−1, 1, 2, 1), (−1, 0, 0, 1), (0, 1, 2, 0)i.
Ahora bien, dado que
¯
¯ 1
¯
¯ −1
¯ −1
¯
¯ 0
2
1
0
1
3
2
0
2
¯
4¯
¯
1¯
=0
1 ¯¯
0¯
dichos vectores no forman una base de L + M .
Para determinar una base de L+M debemos seleccionar un conjunto de vectores que
sean linealmente independientes. Para ello podemos calcular el rango de la matriz
1 2 3 4
−1 1 2 1
A=
−1 0 0 1
0 1 2 0
De esta forma sabremos cuántos vectores hay linealmente independiente y cuáles
son. Para ello procedemos de la siguiente forma:
1) Seleccionamos un menor de orden 2 distinto de cero. En nuestro caso, podemos
tomar el menor formado por las dos primeras filas y las dos primeras columnas
dado que
¯
¯
¯ 1 2¯
¯
¯
¯ −1 1 ¯ 6= 0.
2) Tomamos los menores de orden 3 obtenidos orlando filas y columnas al menor
de orden 2 seleccionado anteriormente hasta encontrar un menor de orden 3 que
sea distinto de cero.
Orlamos la 3a fila y la 3a columna
¯
¯
¯ 1 2 3¯
¯
¯
¯ −1 1 2 ¯ = −1 6= 0,
¯ −1 0 0 ¯
Por lo que concluimos que rango(A)=3 y que una base de L + M viene dada por
los vectores {(1, 2, 3, 4), (−1, 1, 2, 1), (−1, 0, 0, 1)}. Por tanto, dim(L + M ) = 3.
2.4.2
Intersección de dos subespacios
+ Definición 5 Sea V un espacio vectorial y L y M dos subespacios vectoriales
de V. Se define el conjunto
L ∩ M = {w
~ :w
~ ∈Lyw
~ ∈ M }.
El conjunto L ∩ M es un subespacio vectorial de V que llamaremos subespacio vectorial intersección de L y M .
+ Propiedad 2.4.2 Las ecuaciones cartesianas de L ∩ M vienen dadas por el
sistema formado por las ecuaciones cartesianas de L y las de M .
ESPACIOS VECTORIALES.
35
- Ejemplo 2.14
• Consideremos los subespacios vectoriales de R4 dados por
½
2x2 − x3 = 0
L = h(1, 2, 3, 4), (−1, 1, 2, 1)i,
M=
.
x1 + x4 = 0
Para determinar el subespacio L ∩ M necesitamos conocer las ecuaciones cartesianas
de L y de M . En nuestro caso, sólo hemos de determinar las ecuaciones cartesianas
de L. Para ello partimos de las ecuaciónes paramétricas
x =λ−µ
−1
1
x1
1
x2 = 2λ + µ
2
1
x2
⇒
.
~x ∈ L ⇒ = λ + µ
2
3
x3
x3 = 3λ + 2µ
x4 = 4λ + µ
1
x4
4
Eliminando los parámetros λ y µ en las ecuaciones paramétricas de L se obtienen
½
las ecuaciones cartesianas
x1 − 5x2 + 3x3 = 0
L=
.
2x1 + 5x2 − 3x4 = 0
Por tanto, el subespacio vectorial L ∩ M viene dado por las ecuaciones cartesianas
x − 5x2 + 3x3 = 0
1
2x1 + 5x2 − 3x4 = 0
L∩M =
2x2 − x3 = 0
x1 + x4 = 0
Resolviendo el sistema anterior se obtiene
−1
x = −α
x1
1
x2 = α
1
x
,
,α ∈ R ⇒ 2 = α
2
x
=
2α
x
3
3
1
x4 = α
x4
por lo que L ∩ M = h(−1, 1, 2, 1)i y, en consecuencia, dim(L ∩ M ) = 1.
2.4.3
Teorema de la dimensión
+ Resultado 2.4.1 Sean L y M subespacios vectoriales de V.
cumple que
dim(L + M ) = dim(L) + dim(M ) − dim(L ∩ M ).
Entonces se
- Ejercicio 2.15
• Probar que se cumple el Teorema de la dimensión para los subespacios L y M del
Ejemplo 2.10.
• Sea L el conjunto de las matrices cuadradas de orden 2 tales que la suma de sus
columnas es cero y M el conjunto de las matrices cuadradas de orden 2 tales que las
suma de sus filas es cero.
a) Probar que L y M son subespacios vectoriales de M2×2 (R).
b) Obtener una base de L, M , L + M y L ∩ M .
c) Calcular dim(L), dim(M ), dim(L + M ) y dim(L ∩ M ).
36
SUMA E INTERSECCIÓN DE SUBESPACIOS
d) Comprobar que se cumple el Teorema de la dimensión.
• Sean L y M los siguientes subconjuntos de P4 [x], el conjunto de los polinomios de
grado menor o igual que 4 en la variable x, dados por
L = {p(x) ∈ P4 [x] : p(1) = 0, p0 (1) = 0},
a)
b)
c)
4)
2.4.4
M = h1 − x, 3 − 4x + x4 i.
Probar que L es un subespacios vectorial de P4 [x].
Obtener una base de L, M , L + M y L ∩ M .
Calcular dim(L), dim(M ), dim(L + M ) y dim(L ∩ M ).
Comprobar que se cumple el Teorema de la dimensión.
Suma directa de dos subespacios. Subespacios complementarios.
+ Definición 6 Sean L y M dos subespacios vectoriales de V. Si L ∩ M = {~0},
entonces al subespacio vectorial L+M se le denomina suma directa de los subespacios
L y M y se denota por L ⊕ M .
Aplicando el Teorema de la dimensión se obtiene que:
dim(L ⊕ M ) = dim(L) + dim(M ) .
+ Definición 7 Sean L y M dos subespacios vectoriales de V. Se dice que L y M
son subespacios complementarios si,
V = L ⊕ M.
- Ejemplo 2.16
• En P2 [x] consideramos el subespacio vectorial L formado por todos los polinomios
tales que p0 (1) = 0. Nos planteamos encontrar el subespacio vectorial complementario de L, es decir, un subespacio M de P2 [x] de forma que
L ⊕ M = P2 [x].
Cualquier polinomio p(x) ∈ P2 [x] puede escribirse en la forma
p(x) = a0 + a1 x + a2 x2 .
Observemos que el polinomio p(x) puede identificarse con el vector de R3 dado por
p~ = (a0 , a1 , a2 ), es decir,
P2 [x]
←→
R3
2
p(x) = a0 + a1 x + a2 x ←→ p~ = (a0 , a1 , a2 )
Esta identificación nos permite trabajar exactamente igual que lo harı́amos con
vectores de R3 .
La condición p0 (1) = 0 se transforma en la ecuación a1 + 2a2 = 0. En efecto,
p0 (x) = a1 + 2a2 x,
p0 (1) = 0 ⇒ a1 + 2a2 = 0,
que determina la ecuación cartesiana del subespacio L. Resolviendo esta ecuación
obtenemos
(
à !
à !
Ã
!
a0 = λ
a0
1
0
a1 + 2a2 = 0 ⇒ a1 = −2µ ⇒ a1 = λ 0 + µ −2
a2 = µ
a2
0
1
ESPACIOS VECTORIALES.
37
por lo que un sistema de generadores de L viene dado por los vectores p~1 = (1, 0, 0) y
p~2 = (0, −2, 1) que se corresponden con los polinomios p1 (x) = 1 y p2 (x) = −2x+x2 ,
es decir,
L = h~
p1 , p~2 i = h(1, 0, 0), (0, −2, 1)i = hp1 (x), p2 (x)i = h1, −2x + x2 i.
Además, puesto que los vectores p~1 y p~2 son linealmente independientes podemos
asegurar que {~
p1 , p~2 } forman una base de L.
Para determinar el subespacio M lo que se hace es completar la base de L hasta
obtener una base de R3 . Para ello basta añadir un vector p~3 de forma que
det(~
p1 |~
p2 |~
p3 ) 6= 0.
En nuestro caso, podemos considerar el vector
¯
¯1
0
¯
det(~
p1 |~
p2 |~
p3 ) = ¯ 0 −2
¯0
0
p~3 = (0, 0, 1) dado que
¯
0¯
¯
1 ¯ = −2 6= 0.
1¯
El subespacio M complementario de L será el generado por el vector p~3 = (0, 0, 1)
que se corresponde con el subespacio vectorial de P2 [x] generado por el polinomio
p3 (x) = x2 , es decir,
M = h~
p3 i = h(0, 0, 1)i = hp3 (x)i = hx2 i.
- Ejercicio 2.17
• Sea L el subespacio vectorial de M2×2 (R) formado por las matrices tales que la suma
de las filas es cero. Determinar el espacio complementario de L.
• En R4 se consideran los subespacios dados por
½
x1 + x2 + x3 + x4 = 0
L=
, M = h(1, 0, −1, 0), (0, 2, 0, 1)i.
x1 − x4 = 0
Probar que L ⊕ M = R4 .
2.5
EJERCICIOS PROPUESTOS EN EXÁMENES ANTERIORES
1.- En el espacio vectorial M2×3 (R) se considera el conjunto de matrices
½µ
¶
¾
a b a
S=
: a, b, c ∈ R .
0 c 0
a)
b)
c)
d)
] Probar que S es un subespacio vectorial de M2×3 (R).
Escribir las ecuaciones cartesianas y paramétricas de S.
Calcular la dimensión de S y encontar una base de S.
Encontrar un subespacio T de M2×3 (R) de forma que
S ⊕ T = M2×3 (R).
2.- Sea H el conjunto de las matrices cuadradas de orden 2 dado por
½µ
¶
¾
λ
λ+µ
H=
: λ, µ ∈ R .
λ−µ
λ
38
EJERCICIOS PROPUESTOS EN EXÁMENES ANTERIORES
a)
b)
c)
d)
Probar que H es un subespacio vectorial de M2×2 (R).
Escribir las ecuaciones cartesianas y paramétricas de H.
Calcular la dimensión de H y encontrar una base de H.
Dado el subespacio
¿µ
¶ µ
¶À
0 1
1 0
H1 =
,
,
a 0
0 1
obtener, si es posible, el valor de a para que H1 = H.
3.- Dados los subespacios vectoriales L y M de R4 definidos por
L = h(1, 2, α, 1), (1, 0, 1, 1)i,
M = {(x1 , x2 , x3 , x4 ) ∈ R4 : x2 − x3 = 0, x1 − x2 + x4 = 0},
determinar, si es posible, el valor de α para que L ⊕ M = R4 .
4.- Sean B y B 0 dos bases de R2 . Obtener la base B sabiendo que B 0 = {(1, 1), (2, −1)}
y que la matriz del cambio de base de B a B 0 es
µ
¶
1 2
.
2 5
5.- Sea F el espacio vectorial de las funciones continuas de R en R. Se considera
el subespacio vectorial L generado por las funciones f1 (x) = 1, f2 (x) = sen2 x,
f3 (x) = cos2 x, f4 (x) = sen 2x y f5 (x) = cos 2x.
a) Determinar una base de L.
b) Calcular las coordenadas de f (x) = cos 2x + sen 2x respecto de la base anterior.
1 − cos 2x
1 + cos 2x
Nota: Se sabe que sen2 x =
y cos2 x =
.
2
2
6.- Sea P2 [x] el espacio vectorial de los polinomios de grado menor o igual que 2 y
W1 el subespacio vectorial vectorial de P2 [x] dado por
W1 = {p(x) ∈ P2 [x] : p(x) = a + c + (2b + c − a)x + (b + c)x2 ,
a) Encontrar las ecuaciones implı́citas de W1 .
b) Determinar un subespacio vectorial W2 de P2 [x] de forma que
W1 ⊕ W2 = P2 [x].
7.- Dados los subespacios vectoriales de M2×2 (R) definidos por
F = {A ∈ M2×2 (R) : tr(A) = 0},
G = hI2 i.
a) Determinar las ecuaciones cartesianas y paramétricas de F .
b) Probar que F ⊕ G = M2×2 (R).
a, b, c ∈ R}.
3
SISTEMAS DE ECUACIONES LINEALES.
Los sistemas de ecuaciones lineales aparecen en cualquier campo de la ciencia.
Este capı́tulo trata sobre los tópicos relativos a la resolución de sistemas de
ecuaciones lineales. Estudiaremos su clasificación y algunos métodos de resolución de los mismos, como el teorema de Rouché-Fröbenius y el método de
Gauss.
3.1
3.1.1
PRELIMINARES.
Primeros conceptos
Consideremos los siguientes sistemas de ecuaciones de orden 2 × 2.
½
½
½
x + 2y = 3
2x − y = 1
2x − y = 1
S1 ≡
,
S2 ≡
,
S3 ≡
.
2x − y = 1
4x − 2y = 8
4x − 2y = 2
y=
s:
2x
−
Las soluciones serán precisamente los
puntos de intersección de ambas rectas.
El sistema S1 está formado por las ecuaciones de dos rectas r y s que se cortan
en el punto (1, 1). El sistema S1 tiene
solución única:
½
x=1
.
y=1
1
Estos sistemas pueden resolverse utilizando cualquiera de los métodos algebraicos
conocidos (reducción, igualación o sustitución).
Por otra parte, si consideramos cada una de las ecuaciones de los sistemas anteriores
como la ecuación de una recta en el plano podemos dar una interpretación gráfica
de la soluciones de cada uno de los sistemas.
(1, 1)
r :
x+
2y
=
3
39
40
2y
r :
4x
−
r :
2x
−
y=
1
=8
PRELIMINARES.
El sistema S2 está formado por las ecuaciones de dos rectas r y s que son
paralelas. Por tanto, las rectas r y s
no tienen ningún punto en común, lo
que significa que el sistema S2 no tiene
solución.
r :
2x
−y
s:
4x
=1
−2
y=
2
Finalmente, el sistema S3 está formado
por las ecuaciones de dos rectas coincidentes. El sistema tiene, por tanto, infinitas soluciones. Cualquier punto de la
recta r es solución del sistema. Para obtener soluciones particulares del sistema
damos un valor a la incógnita x y, sustituyendo en la ecuación 2x − y = 1, obtenemos el correspondiente valor de y.
x = 1 ⇒ y = 1.
Para expresar la solución general del sistema damos a x un valor arbitrario (x =
λ, λ ∈ R) y calculamos el correspondiente valor de y.
x = λ ⇒ y = 2λ − 1.
½
x = λ
La solución general del sistema S3 será,
,
λ ∈ R.
y = 2λ − 1
El número λ se llama parámetro. Obsérvese que la solución general del sistema viene
dada, precisamente, por las ecuaciones paramétricas de la recta r.
Resolvamos algebraicamente los sistemas anteriores, utilizando el método de reducción, para ver cómo se traducen estas tres situaciones:
½
½
x + 2y = 3
E1 → E1
x + 2y = −1
⇔
S1 ≡
⇔
.
2x − y = 1
E2 → E2 − 2E1
−5y = −5
La segunda ecuación del sistema resultante nos permite despejar la incógnita y. Se
obtiene y = 1. Sustituyendo este valor en la primera ecuación se llega a que x = 1.
½
S2 ≡
2x − y = 1
4x − 2y = 8
⇔
E1 → E1
E2 → E2 − 2E1
½
⇔
2x − y = 1
.
0=6
La segunda ecuación del sistema resultante es una contradicción. Esto significa que
las ecuaciones del sistema son incompatibles. El sistema no tiene solución.
½
S2 ≡
2x − y = 1
4x − 2y = 2
⇔
E1 → E1
E2 → E2 − 2E1
½
⇔
2x − y = 1
.
0=0
SISTEMAS DE ECUACIONES LINEALES.
41
La segunda ecuación del sistema resultante es una identidad. Esto significa que la
ecuación 4x − 2y = 2 no aporta nada al sistema y podrı́a suprimirse. De hecho, se
observa que esta ecuación es combinación lineal de la primera (E1 = 2E2 ).
3.1.2
Definiciones y notaciones
Un sistema lineal de m ecuaciones y n incógnitas es un conjunto de ecuaciones de
la forma
a x + a12 x2 + · · · + a1n xn = c1
11 1
a21 x1 + a22 x2 + · · · + a2n xn = c2
S≡
,
(3.1.1)
..................................
am1 x1 + am2 x2 + · · · + amn xn = cm
siendo aij ∈ R, los coeficientes, ci ∈ R, los términos independientes y xj las
incógnitas, para i = 1, . . . , m y j = 1, . . . , n.
Una solución del sistema (3.1.1) es cualquier conjunto de n valores reales
(x1 , x2 , . . . , xn ) ∈ Rn
que satisfacen el sistema. Resolver un sistema lineal consistirá en:
1.- determinar si tiene solución y,
2.- en caso afirmativo, hallar el conjunto de todas sus soluciones, que notaremos
por CS .
- Ejemplo 3.1
• Las ternas (−3, 0, 0) y (2, 4, 1) son soluciones del sistema
−x + 2y + 3z =
3
y + 4z =
0
S≡
x
−
y
+
z
=
−3
x + 5z = −3
En este caso, el conjunto solución del sistema S es
CS = {(−3 − 5λ, −4λ, λ), λ ∈ R},
(
x = −3 − 5λ
que habitualmente se indica en la forma y = −4λ
, λ ∈ R.
z=λ
La expresión anterior recibe el nombre de solución general del sistema o ecuaciones
paramétricas del sistema.
3.1.2.1 Expresión matricial de un
en forma matricial como
a11 a12 · · ·
a21 a22 · · ·
.
..
..
.
an1 an2 · · ·
sistema. El sistema (3.1.1) puede escribirse
c1
x1
a1n
a2n x2 c2
. = . .
..
. .. ..
cm
xn
amn
42
PRELIMINARES.
Llamando
a11 a12 · · · a1n
a21 a22 · · · a2n
A=
,
..
..
...
.
.
an1 an2 · · · amn
x1
x2
X=
... ,
xn
el sistema (3.1.1) puede escribirse abreviadamente como
A · X = C.
c1
c2
C=
... ,
cm
(3.1.2)
La matriz A se denomina matriz de coeficientes del sistema, X vector columna de
incógnitas y C vector columna de términos independientes.
En lo que sigue también consideraremos la matriz
a11 a12 · · · a1n c1
a21 a22 · · · a2n c2
B=
..
..
..
...
.
.
.
an1 an2 · · · amn cm
que llamaremos matriz ampliada del sistema.
- Ejemplo 3.2
−x + 2y + 3z =
3
y + 4z =
0
puede escribirse matricialmente como
• El sistema S ≡
x
−
y
+
z
=
−3
x + 5z = −3
−1
2 3 Ã !
3
x
1 4
0
0
1 −1 1 y = −3 .
z
1
0 5
−3
En este caso,
à !
3
−1
2 3
−1
2 3
3
x
1 4
1 4
0
0
0
0
, X= y , C=
, B=
A=
.
−3
1 −1 1
1 −1 1 −3
z
1
0 5
−3
1
0 5 −3
3.1.3
Clasificación de los sistemas lineales
Los ejemplos que hemos comentado en la sección 2.1 muestran las 3 situaciones
que nos podemos encontrar cuando resolvamos un sistema de ecuaciones lineales.
Atendiendo al conjunto de soluciones, los sistemas pueden ser:
DETERMINADO Solución única
COMPATIBLE
Tiene
solución
Sistema
INDETERMINADO Infinitas soluciones
INCOMPATIBLE No tiene solución
Por otra parte, atendiendo al vector de términos independientes un sistema se dice
homogéneo si la matriz C = 0; en caso contrario, el sistema se dice completo.
SISTEMAS DE ECUACIONES LINEALES.
43
Obsérvese que cualquier sistema homogéneo admite siempre como solución a la
solución trivial (0, · · · , 0), ası́ todo sistema homogéneo es compatible.
- Ejemplo 3.3
(
x+y+z =0
x − y − z = 0 es un sistema homogéneo y compatible determi2x + 2y + z = 0
nado con solución trivial (x, y, z) = (0, 0, 0).
• El sistema S ≡
3.1.4
Teorema de Rouché-Frobenius.
El siguiente teorema nos permite clasificar los sistemas de ecuaciones lineales mediante el cálculo de los rangos de la matriz de coeficientes y de la matriz ampliada.
+ Teorema 3.1.1 Consideremos el sistema
a11 x1 + a12 x2 + · · · + a1n xn = c1
a21 x1 + a22 x2 + · · · + a2n xn = c2
S≡
.
.
.
...............................
am1 x1 + am2 x2 + · · · + amn xn = cm
Entonces se cumple que el sistema S es
i) compatible determinado si, y sólo si, rango(A) = rango(B) = n,
ii) compatible indeterminado si, y sólo si, rango(A) = rango(B) < n.
iii) Incompatible si, y sólo si, rango(A) 6= rango(B).
Resulta evidente que no existe la posibilidad de que rango(A) = rango(B) > n, pues
A ∈ Mm×n .
- Ejemplo 3.4
• Consideremos
el sistema
x+t=1
1 0 0 1
1
x
y+z+t=1
0 1 1 1
1
y
y + z = 0 ⇔ 0 1 1 0 = 0 .
z
1
−1 1 0 0
−x + y = 1
t
x−t=0
1 0 0 −1
0
En primer lugar observemos que rango(A) = 4, dado que podemos seleccionar un
menor de orden 4 en la matriz A que es distinto de cero,
¯
¯
¯
¯
¯ 1 0 0
1 ¯
¯
¯
¯ 1 0
¯
¯
1 ¯
¯ 1
1 ¯¯
0 ¯
¯
¯
¯ 0 1 1
¯
0 ¯ = −¯
= 2 6= 0.
= − ¯ −1 1
¯ −1 1 0
1 −1 ¯
0 ¯¯
¯ 1 0 −1 ¯
¯
¯ 1 0 0 −1 ¯
A continuación estudiamos el rango de la matriz ampliada
1 0 0
1 1
0 1 1
1 1
0 0 .
B= 0 1 1
−1 1 0
0 1
1 0 0 −1 0
44
RESOLUCIÓN DE SISTEMAS
Puesto que |B| = −1 6= 0, resulta que rango(B) = 5.
Como rango(A) 6= rango(B), el teorema de Rouché-Frobenius nos asegura que el
sistema es incompatible.
- Ejercicio 3.5
• Clasificar el siguiente sistema según los diferentes valores
(
(m + 2)x1 + x2 + x3 + mx4 =
mx1 + (m − 1)x2 + x3 + (m − 1)x4 =
(m + 1)x1 + (m + 1)x3 =
de m
0
−1 − m
−4
Solución: Estudiamos el rango de la matriz
Ã
A=
m+2
1
1
m
m
m−1
1
m−1
m+1
0
m+1
0
Para ello, calculamos el valor de los
¯
¯
1
1
¯
1
¯ m−1
¯
0
m+1
¯
¯ m+2
1
¯
1
¯ m
¯ m+1 m+1
¯
¯ m+2
1
¯
m−1
¯ m
¯ m+1
0
¯
¯ m+2
1
¯
m−1
¯ m
¯ m+1
0
!
.
posibles menores de orden 3 de la matriz A,
¯
m ¯
¯
m − 1 ¯ = (m + 1) (m − 1)2
¯
0
¯
m ¯
¯
m − 1 ¯ = −m2 + 1
¯
0
¯
m ¯
¡
¢
¯
m − 1 ¯ = (m + 1) 2m − 1 − m2
¯
0
¯
¯
1
¯
1
¯ = (m − 1) m (m + 1) .
m+1 ¯
Todos los menores de orden 3 se anulan simultáneamente sólo cuando m = −1. Ası́ resulta
que, para m 6= −1, rango(A) = 3. Sustituyendo el valor m = −1 en la matriz A se deduce
fácilmente que, en este caso, rango(A) = 2.
Estudiaremos, a continuación, el rango de la matriz ampliada. Puede comprobarse que
para cualquier valor de m
Ã
!
m+2
1
1
m
0
m
m−1
1
m − 1 −1 − m
rango(B) = rango
= 3.
m+1
0
m+1
0
−4
Resumiendo, pueden presentarse los siguientes casos:
1.- m 6= −1 rango(A) = rango(B) = 3 = número de incógnitas ⇒ sistema compatible
determinado
2.- m = −1 rango(A) = 2 6= rango(B) = 3 ⇒ sistema incompatible.
SISTEMAS DE ECUACIONES LINEALES.
3.2
3.2.1
45
RESOLUCIÓN DE SISTEMAS
Sistemas diagonales
Obviamente, los sistemas de ecuaciones lineales más fáciles de resolver son los que
“ya están resueltos”. En estos sistemas, la matriz de coeficientes es la matriz identidad,
c1
x1
1 0 ··· 0
0 1 · · · 0 x 2 c2
. . .
.. .. . . ... ... = ... ,
cn
xn
0 0 ··· 1
y las ecuaciones del sistema son sencillamente de la forma xi = ci , i = 1, 2, · · · , n.
Estos sistemas son un sistema particular de sistemas diagonales. Un sistema se dice
diagonal si la matriz de coeficientes del sistema es una matriz diagonal. En forma
matricial, un sistema diagonal, viene dado por
a11 0 · · · 0
x1
c1
0 a22 · · · 0 x2 c2
.
.. . .
. . = . .
..
. .. .. ..
.
0
0 · · · ann
xn
cn
Las ecuaciones de un sistema diagonal son de la forma
aii xi = ci , i = 1, 2, · · · , n.
Si aii 6= 0, para cada i = 1, 2, · · · , n, la solución se obtiene directamente en la
forma xi = ci /aii , i = 1, 2, · · · , n, y el sistema será compatible determinado. Por
el contrario, si aii = 0 para algún valor de i, el sistema será indeterminado si el
correspondiente ci = 0 (la ecuación i-ésima será de la forma 0 = 0) o incompatible
si ci 6= 0 (la ecuación i-ésima resulta una contradicción 0 = ci 6= 0).
3.2.2
Sistemas triangulares
Un sistema de ecuaciones lineales de orden m × n se llama triangular superior si se
verifica que
aii 6= 0, i = 0, 1, · · · , k ;
aij = 0, si i > j,
siendo k = min{m, n}; es decir, la matriz de coeficientes verifica que los elementos
situados en la diagonal principal son todos distintos de cero y los elementos situados
debajo de la diagonal principal son todos nulos.
3.2.2.1 Resolución de sistemas triangulares. Podemos encontrarnos con las siguientes situaciones:
1.- m = n El número de ecuaciones es igual al números de incógnitas.
En este caso, el sistema será de la forma
a x + a12 x2 + · · · + a1n xn = c1
11 1
a22 x2 + · · · + a2n xn = c2
··· ··· ··· ···
ann xn = cn
La solución del sistema se obtiene de forma recursiva:
46
RESOLUCIÓN DE SISTEMAS
• Despejamos xn en la última ecuación.
• Sustituimos su valor en la ecuación anterior y despejamos xn−1 .
• Continuamos el proceso hasta determinar el valor de cada una de las incógnitas.
Observemos que esto es posible por la condición de que aii 6= 0, i =
1, 2, · · · , n.
La solución viene dada por
´
n
P
cn
1³
xnn =
,
xi =
aij xj ,
ci −
ann
aii
j=i
i = n − 1, · · · , 1.
El sistema tiene, por tanto, solución única, es decir, se trata de un sistema
compatible determinado.
2.- m > n El número de ecuaciones es mayor que el números de incógnitas.
El sistema será de la forma
a11 x1 + a12 x2 + · · · + a1n xn = c1
a22 x2 + · · · + a2n xn = c2
··· ··· ···
···
ann xn = cn
0 = cn+1
..
.
0 = cm
Si alguno de los ci , i = n+1, · · · , m, es distinto de cero, entonces se presenta una
contradicción, es decir, el sistema es incompatible. En cambio, si ci = 0 para
i = n + 1, · · · , m, las últimas m − n ecuaciones quedan reducidas a igualdades
del tipo 0 = 0, es decir, no aportan nada al sistema y pueden suprimirse. A
continuación se procede como en el caso a).
3.- m < n El número de ecuaciones es menor que el número de incógnitas
El sistema será del tipo
a x + a12 x2 + · · · + a1m + · · · + a1n xn = c1
11 1
a22 x2 + · · · + a2m + · · · + a2n xn = c2
··· ··· ··· ···
amm + · · · amn xn = cm
En este caso se dice que las incógnitas xm+1 , · · · , xn “no están sometidas a
control ” y, por tanto, podrán tomar valores arbitrarios. Para resolver el sistema
procedemos de la siguiente manera:
• Asignamos a las variables xm+1 , · · · , xn valores arbitrarios
xn+1 = λ1 ,
xn = λn−m .
• A continuación despejamos el resto de las incógnitas xi , j = m, · · · , 1, siguiendo el procedimiento descrito en el caso a). Los valores de estas incógnitas vendrán dados en función de λ1 , · · · , λm−n que se llaman parámetros.
El sistema es, por tanto, compatible indeterminado (con n − m parámetros).
SISTEMAS DE ECUACIONES LINEALES.
47
- Ejemplo 3.6
• El sistema
½
S≡
−x + 2y + 3z − 3t = 3
,
y + 4z − 2t = 11
es un sistema triangular con 2 ecuaciones y 4 incógnitas. Las incógnitas z y t no
están sometidas a control. Para resolver el sistema asignamos a estas incógnitas
valores arbitrarios,
−x + 2y + 3z − 3t = 3
y + 4z − 2t = 11
S≡
,
λ, µ ∈ R.
z = λ
t = µ
Ahora podemos despejar el valor de las incógnitas y y x, de forma recursiva,
x = 19 − 6λ + 3µ
y = 11 − 4λ + 3µ
,
λ, µ ∈ R.
z = λ
t=µ
Se trata de un sistema compatible indeterminado (con 2 parámetros).
3.2.3
Sistemas equivalentes. Método de resolución de Gauss
Dos sistemas de ecuaciones S y S 0 se dicen equivalentes cuando ambos tienen el
mismo conjunto de soluciones, es decir, toda solución de S es también solución de
S 0 y viceversa. Resolver un sistema será, por tanto, lo mismo que resolver otro que
sea equivalente a él.
+ Resultado 3.2.1 Las operaciones que permiten pasar de un sistema lineal a
otro equivalente son:
1.- Cambiar de orden las incógnitas.
2.- Cambiar de orden las ecuaciones.
3.- Multiplicar una ecuación por un número distinto de cero.
4.- Sumar a una ecuación una combinación lineal de las restantes.
5.- Suprimir del sistema una ecuación que sea combinación lineal de las restantes.
Observemos que estas operaciones guardan una estrecha relación con las operaciones
elementales sobre matrices que no alteraban el rango de una matriz. De hecho,
en el método de Gauss (que exponemos a continuación), las operaciones b)-e) se
traducirán en hacer operaciones elementales en las filas de la matriz ampliada del
sistema.
3.2.3.1 Método de Gauss. El método de Gauss consiste en aplicar operaciones
elementales sobre un sistema S para transformarlo en otro que sea equivalente a él
y además sea triangular superior.
48
RESOLUCIÓN DE SISTEMAS
Consideremos el sistema
a x + a12 x2 + . . . + a1n xn = c1
11 1
a21 x1 + a22 x2 + . . . + a2n xn = c2
S≡
······
···
······
···
······
am1 x1 + am2 x2 + . . . + amn xn = cm
El método de Gauss consiste en lo siguiente:
1) Suponemos que a11 6= 0. Si esto no fuera cierto reordenamos las ecuaciones y/o
las incógnitas del sistema para situar en la posición (1, 1) un coeficiente distinto
de cero.(En la práctica es aconsejable que a11 = 1, esto podrı́a conseguirse
dividiendo la primera ecuación por −a11 o reordenando las ecuaciones y/o las
incógnitas, según lo que más interese).
2) A continuación mantenemos la 1a ecuación E1 → E1 y transformamos el resto
de las ecuaciones sumándoles la primera ecuación multiplicada por −ai1 /a11 ,
Ei → Ei −
ai1
E1 , i = 2, · · · , m.
a11
Tras esta operación se consigue un sistema S 0 , equivalente al anterior, dado por
a11 x1 + a12 x2 + a13 x3 + · · · + a1n xn = c1
a∗22 x2 + a∗23 x3 + · · ·+ a∗2n xn = c∗2
S0 ≡
..................................
a∗ x2 + a∗ x3 + · · · + a∗ xn = c∗
m2
donde, a∗ij = aij −
ai1 a1j
,
a11
c∗i = ci −
m3
ai1 c1
,
a11
mn
m
i = 2, · · · , m,
j = 2, · · · , n.
3) Ahora repetimos el procedimiento anterior para el subsistema (∗), suponiendo
que a∗22 6= 0. En caso contrario reordenamos las ecuaciones y/o las incógnitas
del subsistema (∗) para conseguir situar un elemento en la posición (2, 2) que
sea distinto de cero, ... (En el caso de que sea necesaria una reordenación de
las incógnitas ésta también afectará a la ecuación primera).
4) Reiteramos el procedimiento hasta encontrarnos con alguna de las siguientes
situaciones:
• Hemos agotado todas las ecuaciones.
• Hemos agotado todas las incógnitas.
• Todos los coeficientes del subsistema obtenido son cero.
La resolución del sistema triangular resultante se hará teniendo en cuenta la técnica
descrita en la sección 3.2.2.
- Ejercicio 3.7
(
• Resolver el sistema S ≡
x+y = 2
−2x − y + 2z = −3 aplicando el método de Gauss
2x − 4z = 2
SISTEMAS DE ECUACIONES LINEALES.
49
Solución:
(
S≡
x+y = 2
−2x − y + 2z = −3
2x − 4z = 2
⇔
E1 → E1
E2 → E2 + 2E1
E3 → E3 − 2E1
⇔
E1 → E1
E2 → E2
E3 → E3 + 2E2
(
⇔
(
⇔
x+y = 2
y + 2z = 1
−2z − 4z = −2
x+y =2
y + 2z = 1
0=0
La incógnita z no está sometida a control, por lo que le asignamos un valor arbitrario
(
x+y =2
y + 2z = 1 , λ ∈ R.
z=λ
(
x = 1 + 2λ
Despejando las incógnitas y y x se obtiene y = 1 − 2λ , λ ∈ R.
z=λ
Se trata de un sistema compatible indeterminado (con 1 parámetro).
En la práctica, con objeto de simplificar las notaciones, las transformaciones anteriores
se aplican directamente sobre la matriz de coeficientes del sistema. Las operaciones sobre
cada una de las ecuaciones del sistema se traducen en las correspondientes operaciones
elementales sobre las filas de la matriz ampliada.
(
Ã
!
x+y = 2
1
1
0
2
F1 → F1
−2x − y + 2z = −3 ⇔ −2 −1
2 −3 ⇔ F2 → F2 + 2F1 ⇔
2x − 4z = 2
2
0 −4
2
F3 → F3 − 2F1
Ã
1
1
0
0
1
2
0 −2 −4
2
1
−2
!
F1 → F1
F2 → F2
F3 → F3 + 2F2
⇔
Ã
⇔
1 1 0
0 1 2
0 0 0
2
1
0
!
(
⇔
x+y =2
y + 2z = 1
0=0
Por otra parte, las transformaciones que hemos efectuado sobre las filas de la matriz
ampliada pueden expresarse matricialmente en la forma
à !
Ã
!Ã !
F1 → F1
F1
1 0 0
F1
F2 → F2 + 2F1 ⇔ F2 →
2 1 0
F2
F3 → F3 − 2F1
F3
−2 0 1
F3
Ã
à !
!Ã !
1 0 0
F1 → F1
F1
F1
F2 → F2
F2 .
⇔ F2 → 0 1 0
F3 → F3 + 2F2
F3
F3
0 2 1
Las matrices
Ã
M1 =
1 0 0
−2 1 0
2 0 1
!
Ã
y M2 =
1 0 0
0 1 0
0 2 1
!
,
se llaman matrices de cambio correspondientes a cada una de las transformaciones. El
efecto producido sobre la matriz ampliada del sistema por cada una de estas transformaciones puede obtenerse multiplicando a izquierda por cada una de estas matrices de
cambio. Más concretamente, la transformación 1a puede expresarse como
Ã
!Ã
! Ã
!
1 0 0
1
1
0
2
1
1
0
2
1 = B0
−2 −1
2 −3 = 0
1
2
M1 · B = −2 1 0
2 0 1
2
0 −4
2
0 −2 −4 −2
50
RESOLUCIÓN DE SISTEMAS
y la transformación 2a se corresponde
Ã
1 0
M2 · B 0 = 0 1
0 2
con el producto,
!Ã
0
1
1
0
0
0
1
2
1
0 −2 −4
2
1
−2
!
= B 00 .
La matriz B 00 resultante tras estas transformaciones se puede escribir
B 00 = M2 · B 0 = M2 · (M1 · B) = (M2 · M1 ) · B = M · B,
Ã
! Ã
! Ã
!
1 0 0
1 0 0
1 0 0
2 1 0 .
donde M = M2 · M1 = 0 1 0 · 0 1 0 =
0 2 1
0 2 1
−2 2 1
Podemos decir que la matriz M es la matriz que sintetiza todos las transformaciones que
hemos de efectuar sobre las filas de la matriz ampliada o sobre las ecuaciones del sistema
para convertirlo en un sistema triangular equivalente.
Además, puesto que la 3a fila de la matriz final es nula, la 3a fila de la matriz M tiene un
significado especial:
−2F1 + 2F2 + 3F3 = 0 ⇒ F3 = 2F1 − 2F2 ,
lo que nos dice que la 3a fila de la matriz B es combinación lineal de la 1a y la 2a filas, o
lo que es lo mismo, que la 3a ecuación del sistema S es combinación lineal de la 1a y de la
2a . De hecho, E3 = −2E1 + 2E2 como puede comprobarse directamente.
3.2.4
Método de Cramer
Un sistema lineal de n ecuaciones y n incógnitas se dice que es un sistema de Cramer
si la matriz de coeficientes del sistema es regular.
Si escribimos el sistema en la forma matricial abreviada
A · X = C,
(3.2.1)
donde A ∈ Mn , entonces la condición para que (3.2.1) sea un sistema de Cramer es
que det(A) 6= 0. Esta condición es equivalente a que rango(A) = n, lo que implica
que también rango(B) = n. Por tanto, aplicando el Teorema de Rouché-Frobënius
concluimos que todo sistema de Cramer es compatible determinado. Además, la
única solución del sistema (3.2.1) se puede obtener como
X = A−1 · C,
o equivalentemente, en cada coordenada
i
|{z}
(3.2.2)
¯
· · · c1 · · · a1n ¯¯
· · · c2 · · · a2n ¯
. ..
. ¯
..
. ..
. .. ¯¯
· · · cn · · · ann ¯
,
i = 1, 2, · · · , n,
(3.2.3)
xi =
|A|
donde el determinante que figura en el numerador es el determinante de la matriz de
coeficientes en la que hemos sustituido la i-ésima columna por el vector de términos
independientes.
¯
¯
¯
¯
¯
¯
¯
¯
a11
a21
..
.
an1
SISTEMAS DE ECUACIONES LINEALES.
51
- Ejemplo 3.8
• El sistema
(
Ã
! Ã ! Ã !
x−z =0
1
0 −1
x
0
2x − y + z = 3 ⇔ 2 −1
1 · y = 3 ,
x − y + 3z = 4
1 −1
3
z
4
es un sistema de Cramer, dado que
¯
¯
¯1
0 −1 ¯
¯
¯
1 ¯ = −1 6= 0.
det(A) = ¯ 2 −1
¯ 1 −1
3¯
Para calcular la solución del sistema podemos utilizar la igualdad (3.2.2),
à ! Ã
! Ã ! Ã
!Ã ! Ã !
x
1
0 −1 −1 0
2 −1 1
0
1
−1
1
3 = 5 −4 3
3 = 0 .
X = A · C ⇒ y = 2 −1
z
1 −1
3
4
1 −1 1
4
1
El mismo resultado obtendrı́amos si hacemos uso de la fórmula (3.2.3):
¯
¯
¯
¯
¯
¯
¯0
¯ 1 0 −1 ¯
¯1
0 −1 ¯
0 0¯
¯
¯
¯
¯
¯
¯
1¯
1¯
¯ 3 −1
¯2 3
¯ 2 −1 3 ¯
¯ 4 −1
¯
¯
¯
¯
3
1 4
3
1 −1 4 ¯
x=
= 1, y =
= 0, z =
= 1.
|A|
|A|
|A|
3.2.4.1 Método de Cramer generalizado. La fórmula (3.2.3) puede aplicarse
también para resolver sistemas compatibles que no son de Cramer; es decir, a sistemas donde A no es cuadrada o A no es regular. El método consistirá en reducir
el sistema inicial a otro sistema que sea de Cramer eliminando las ecuaciones que
sean combinación lineal de las restantes y pasando al segundo término las incógnitas
que no estén controladas (a las que asignaremos valores arbitrarios). Ilustramos el
método con el siguiente ejemplo.
- Ejemplo 3.9
(
3x − 2y − 2z = 8
−x + 3y + 4z = 5
2x + 5y + 2z = 13
En primer lugar, observamos que no es de Cramer, dado que
¯
¯
¯ 3 2 −4 ¯
¯
¯
4 ¯ = 0,
det(A) = ¯ −1 3
¯ 2 5
2¯
lo que significa que rango(A) ≤ 3.
Veamos si se trata de un sistema compatible. Para ello estudiamos los rangos de la
matriz A y de la matriz ampliada del sistema.
Ã
!
Ã
!
3 2 −4
3 2 −4
8
4 ,
5 .
4
A = −1 3
B = −1 3
2 5
2
2 5
2 13
Puesto que
¯
¯
¯
¯
¯ 3 2 8¯
¯ 3 2¯
¯
¯
¯
¯
¯ −1 3 ¯ = 11 6= 0 ⇒ rango(A) = 2, ¯¯ −1 3 5 ¯¯ = 0 ⇒ rango(B) = 2.
2 5 13
• Consideremos el sistema S ≡
52
RESOLUCIÓN DE SISTEMAS
Luego, rango(A) = rango(B) = 2 < 3 = número de incógnitas y el sistema es compatible indeterminado. Para resolver el sistema procedemos de la siguiente forma:
1) Tomamos el menor distinto de cero que hemos seleccionado para determinar el
rango del sistema,
x y
↓ ↓
E1 → 3 2
E2 → −1 3
obtenido tomando las dos primeras filas de la matriz A y las dos primeras columnas (que corresponden a las variables x e y).
2) Suprimimos aquellas ecuaciones que no intervienen en este menor (dado que
serán combinación lineal de las ecuaciones que sı́ intervienen en él). En nuestro
caso, suprimimos la 3a .
3) Aquellas incógnitas que no intervengan en el menor seleccionado (en nuestro
caso la z) las pasamos al otro término y le asignamos un valor arbitrario (tales
incógnitas no están sometidas a control).
Tras estas operaciones, el sistema resultante será:
½
3x + 2y = 8 + 2z
−x + 3y = 5 − 4z
Finalmente, resolvemos el sistema anterior aplicando la fórmula de Cramer (3.2.3),
¯
¯
¯
¯
¯ 4 8 + 2z ¯
¯ 8 + 2z 2 ¯
¯
¯
¯
¯
¯ −1 5 − 4z ¯
¯ 5 − 4z 3 ¯
14 + 14z
23 − 10z
¯
¯ =
¯
,
, z = λ, λ ∈ R.
x = ¯¯
=
¯
¯
¯
11
11
¯ 3 2¯
¯ 3 2¯
¯ −1 3 ¯
¯ −1 3 ¯
La solución vendrá dada por
14 14
x=
+
λ
11 11
23 20
,
y=
−
λ
11
11
z=λ
3.2.5
λ ∈ R.
Método de Gauss-Jordan para el cálculo de la matriz inversa
En la práctica, la fórmula
X = A−1 · C,
para resolver sistemas de Cramer resulta muy poco operativa debido a que el cálculo
de la matriz inversa (utilizando la matriz adjunta) es demasiado engorroso para
n ≥ 2. Por otra parte, el cálculo de la matriz inversa es una operación que tiene
interés en si mismo dado que tiene muchas aplicaciones. El método de Gauss-Jordan
simplifica notablemente el cálculo de la inversa de una matriz regular por medio de
la realización de combinaciones lineales sobre las filas de ésta y está fundamentado
en la siguiente propiedad que ya pusimos de manifiesto en la segunda parte del
Ejemplo 2.5.
SISTEMAS DE ECUACIONES LINEALES.
53
+ Resultado 3.2.2 El efecto de la multiplicación M · N es equivalente a realizar
combinaciones lineales en las filas de la matriz N. Los coeficientes que figuran en
estas combinaciones lineales son precisamente los elementos de las filas de la matriz
M.
- Ejemplo 3.10
µ
• Sean M =
¶
Ã
1
2
0
y N = −3
1 −3
µ
¶ Ã 1
1 −1 3
· −3
M ·N =
2
1 1
1
1 −1 3
2
1 1
!
0
1 , cuyo producto viene dado por
2
! µ
¶
2 0
7 −7 5
0 1 =
.
0
1 3
−3 2
Observemos que el primer vector fila de la matriz M · N puede escribirse como
(7, −7, 5) = 1(1, 2, 0) − 1(−3, 0, 1) + 3(1, −3, 2),
es decir, la primera fila de M · N se obtiene como combinación lineal de las filas de
la matriz N utilizando como coeficientes los elementos de la primera fila de M . Lo
mismo ocurre con la segunda fila de la matriz M · N ,
(0, 1, 3) = 2(1, 2, 0) + 1(−3, 0, 1) + 1(1, −3, 2),
donde ahora los coeficientes son los elementos de la 2a fila de la matriz M .
Una situación análoga se produce sobre las columnas de la matriz M cuando efectuamos el producto M · N. Más concretamente, las columnas de la matriz M · N se
obtienen como combinación lineal de las columnas de M donde los coeficientes son
los elementos de las columnas de N. Ası́, por ejemplo, la 2a columna de la matriz
M · N , puede escribirse como
µ
¶
µ ¶
µ
¶
µ ¶
−7
1
−1
3
=2
+0
−3
.
1
2
1
1
Se trata de una combinación lineal de las columnas de la matriz M utilizando como
coeficientes los elementos de la 2a columna de la matriz N .
Sea A una matriz regular y sea M = A−1 . Entonces se cumple que
M · A = I.
(3.2.4)
De acuerdo con la Proposición 3.2.2, los vectores fila de la matriz M ·A son combinaciones lineales de los vectores fila de la matriz A. Por tanto, la igualdad (3.2.4) nos
dice que podemos transformar la matriz A en la matriz I efectuando combinaciones
lineales de los vectores fila de A. La matriz M es, entonces, la matriz que nos indica
cuáles son las combinaciones lineales necesarias para conseguir esta transformación.
Por otra parte, se tiene que
M · I = M = A−1 ,
lo que nos indica que si realizamos con los vectores fila de la matriz I las mismas
combinaciones lineales que hemos realizado anteriormente en la matriz A, entonces
la matriz I se transforma en A−1 .
Esto nos da un procedimiento para encontrar la inversa de una matriz regular que
se conoce como método de Gauss-Jordan. Consiste en lo siguiente:
54
RESOLUCIÓN DE SISTEMAS
a) Hagamos en la matriz A las combinaciones lineales de sus filas que sean necesarias para transformarla en la matriz I.
b) Hagamos esas mismas combinaciones lineales con los vectores fila de la matriz
I.
c) Cuando la matriz A se haya transformado en la matriz I, entonces la matriz
I se habrá convertido en la matriz A−1 .
En la práctica consideraremos la matriz (A|I) obtenida ampliando la matriz A con
la matriz I. El método de Gauss-Jordan se sintetiza en el siguiente esquema:
(A|I) → mediante combinaciones lineales de filas → (I|A−1 ).
- Ejercicio 3.11
Ã
• Calcular la matriz inversa de la matriz A =
Solución:
Ã
(A|I) =
1 0 −3
0 2
1
1 0
0
1 0 0
0 1 0
0 0 1
F1 → F1
F2 → F2
F3 → F3 − F1
1 0
0 1
0 0
0
1
2
1
0
0
− 31
0
1
2
0
La matriz inversa será
3.2.6
Ã
→
1
0 →
1
3
A−1
=
!
F1 → F3
F2 → F2
F3 → F1
→
1 0
0
0 2
1
0 0 −3
F1 → F1
F2 → 12 F3
F3 → F3
0
1
6
− 13
0
1
2
0
1
1 0 −3
0 2
1
1 0
0
Ã
→
!
1 0
0
0 2
1
1 0 −3
0 0 1
0 1 0
1 0 0
!
→
!
F1 → F1
0 0
1
0 1
0 → F2 → 12 F2
→
1 0 −1
F3 → − 13 F3
1 0 0
0 0
1
1
1
1
→ 0 1 0
= (I|A−1 ).
6
2 −6
1
0 0 1
− 13 0
3
− 61 .
1
3
Sistemas homogéneos.
Una clase de sistemas particularmente sencillos de clasificar son los sistemas homogéneos. En la primera sección del capı́tulo ya vimos que un sistema A · X = C
es homogéneo cuando C = 0, (todos los ci = 0, i = 1, 2, · · · m). De forma evidente,
la solución trivial es siempre solución del sistema. Por consiguiente concluimos que
todo sistema homogéneo es un sistema compatible. Además, en este tipo de sistemas
el rango de A siempre coincide con el rango de la matriz ampliada B. En definitiva,
el Teorema 3.1.1 se concreta en el siguiente resultado:
+ Corolario 3.2.1 Un sistema lineal homogéneo es compatible determinado si,
y sólo si, rango(A) es igual al número de incógnitas. En caso contrario, el sistema
es compatible indeterminado.
SISTEMAS DE ECUACIONES LINEALES.
55
- Ejemplo 3.12
• El sistema
(
x+y+z =0
x−y−z =0
2x + 2y + z = 0
es un sistema homogéneo y compatible determinado con solución trivial (x, y, z) =
(0, 0, 0), cuya forma matricial es
!Ã ! Ã !
Ã
0
x
1
1
1
0 .
y
1 −1 −1
=
0
2
2
1
z
3.3
RESOLUCIÓN DE SISTEMAS CON MATHEMATICA.
Mathematica lleva implementado una serie de comandos para la clasificación y resolución de sistemas.
- Ejemplo 3.13
x+t=1
y+z+t=1
y+z =0
es incompatible (véase Ejemplo 3.4).
• El sistema
−x
+
y
=
1
x−t=0
El siguiente comando de Mathematica nos facilita la misma conclusión
Reduce@8x + t 1, y + z + t 1, y + z 0, −x + y 1, x − t 0<D
False
(
x−z =0
2x − y + z = 3
es (1, 0, 1).
x − y + 3z = 4
La solución puede obtenerse com Mathematica mediante el comando
• La solución del sistema
Reduce@8x − z 0, 2 x − y + z 3, x − y + 3 z 4<D
x == 1 fl y == 0 fl z == 1
o el comando
Solve@8x − z 0, 2 x − y + z 3, x − y + 3 z 4<D
88x Ø 1, z Ø 1, y Ø 0<<
56
RESOLUCIÓN DE SISTEMAS CON
MATHEMATICA.
También podemos emplear el comando siguiente, donde las matrices que aparecen
son la matriz de coeficientes A y la de términos independientes C,
1 0 −1 y i 0 y
i
j
z j
zE
j3z
j
z
2
−1 1 z
LinearSolveAj
,j
j
z
z
j z
j
z
j
z j z
k 1 −1 3 { k 4 {
ij 1 yz
jj zz
jj 0 zz
jj zz
k1{
• Para discutir y resolver el sistema
(
(m + 2)x1 + x2 + x3 + mx4 = 0
mx1 + (m − 1)x2 + x3 + (m − 1)x4 = −1 − m
(m + 1)x1 + (m + 1)x3 = −4
según los valores de m utilizamos el comando
Reduce@8Hm + 2L x1 + x2 + x3 + m x4 0,
m x1 + Hm − 1L x2 + x3 + Hm − 1L x4 −1 − m, Hm + 1L x1 + Hm + 1L x3 −4<D
-m2 + x1 m - 3 m + x1 - 4
m == 1 fl x2 == -2 x1 - x4 + 2 fl x3 == -x1 - 2 Î x2 == ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅ Ì
m2 - 1
-m x1 - x1 - 4
-x1 m2 - x1 m + m + 7
x3 == ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
ÅÅÅÅÅÅÅÅÅÅÅÅÅ Ì x4 == ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ Ì m - 1 ∫ 0 Ì m + 1 ∫ 0
m+1
m2 - 1
A la vista de este resultado se concluye que
a) Si m = 1, el sistema es compatible indeterminado con soluciones
(x1 , −2x1 − x4 + 2, −x1 − 2, x4 ),
x1 , x4 ∈ R.
b) Si m 6= 1, −1, el sistema es compatible indeterminado con soluciones
µ
¶
−m2 + mx1 − 3m + x1 − 4 −mx1 − x1 − 4 −m2 x1 − mx1 + m + 7
x1 ,
,
,
.
m2 − 1
m+1
m2 − 1
c) Si m = −1, el sistema es incompatible.
SISTEMAS DE ECUACIONES LINEALES.
3.4
57
EJERCICIOS PROPUESTOS EN EXÁMENES ANTERIORES
1.- Discutir y resolver, cuando sea posible, el siguiente sistema de ecuaciones según
los valores de a y b,
(
ax + by + z = 1
x + aby + z = 1 .
x + by + az = 1
2.- Analizar y resolver cuando sea posible el siguiente sistema de ecuaciones según
los valores de a y b,
ax + y + z + t = 1
x + ay + z + t = b
2 .
x
+ y + a z + t = b3
x+y+z+t=b
3.- Discutir y resolver, cuando sea posible, el siguiente sistema de ecuaciones según
los valores de p y q,
(
x + p(y + z) = q
y + p(x + z) = q .
z + p(x + y) = q
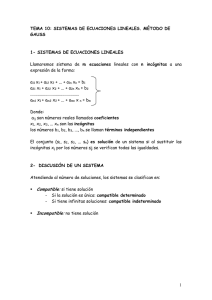

![1 Considere una matriz n × 3 descrita en columnas A = [c, d, a] para](http://s2.studylib.es/store/data/007384371_1-ed8eedfce97cb2d3533515e767897869-300x300.png)