Plantilla Artículo Revista `Inteligencia Artificial`
Anuncio

Resumen Memoria
Aproximación a una Arquitectura hibrida bio-inspirada
para el arbitraje de comportamientos en Agentes
Cognitivos
Estudiante: Oscar J. Romero López
Tutor: Angélica de Antonio
Universidad Politécnica de Madrid
Departamento de Doctorado en Ingeniería de Software
Madrid, 28660 (España)
ojrlopez@hotmail.com
Resumen
El siguiente trabajo presenta una propuesta de extensión a la arquitectura subsumida propuesta por Brooks, la cual
refleja características evolutivas, hibridas, auto-configurables y de aprendizaje, aplicable en el área que subyace la
construcción de cognición artificial en agentes. Las capas de la arquitectura son controladas por Sistemas de
Aprendizaje de Máquina (SAM) que emplean técnicas de inteligencia computacional bio-inspirada, tales como los
Sistemas Clasificadores Extendidos (SCE), los Sistemas Inmunes Artificiales (SIA), los Sistemas Coneccionistas de
Aprendizaje-Q (SCQ), los Sistemas Clasificadores de Aprendizaje (SCA), y escalable a otros. Durante el desarrollo
de la investigación se emplea un mecanismo evolutivo llamado Programación de Expresiones Genéticas (PEG) el
cual le permite al agente auto-configurar el arbitraje de comportamientos entre capas. Adicionalmente, se propone
un mecanismo co-evolutivo que evoluciona los repertorios de comportamientos empleados por los agentes, de una
manera independiente y colaborativa. La aproximación propuesta fue probada en un entorno animat empleando una
plataforma multi-agentes donde fue posible observar propiedades emergentes que dieron origen a procesos
cognitivos superiores, tales como el aprendizaje, la adaptabilidad y la auto-configuración de capas de
procesamiento.
Keywords: Arquitectura Subsumida, Programación de Expresiones Genéticas, Sistemas Clasificadores, Sistemas
Inmunes, Redes Neuronales, Algoritmos Genéticos, Aprendizaje-Q, Aprendizaje de Máquina, Mecanismos Coevolutivos, Vida Artificial, Agentes Inteligentes.
1. Introducción
En las últimas décadas, las Arquitecturas Cognitivas para agentes inteligentes han sido un área importante de
estudio que reúne disciplinas como la inteligencia artificial, la cognición humana, psicología, y muchas otras, con
el fin de determinar la distribución óptima y necesaria de recursos para el desarrollo de agentes que exhiban cierto
nivel de inteligencia emergente. Una de las más referenciadas es la Arquitectura Subsumida propuesta por Brooks
[1]. De acuerdo con Brooks, la Arquitectura Subsumida está construida por capas. Cada capa le ofrece al sistema un
conjunto de comportamientos pre-conectados donde las capas de niveles superiores se basan en las inferiores para
crear comportamientos más complejos: El comportamiento del sistema como un todo, resultado de la interacción de
2
múltiples comportamientos simples. Otra característica en esta arquitectura es la ausencia de un modelo del mundo,
lo que significa que sus respuestas son siempre y únicamente reflexivas.
Sin embargo, la Arquitectura Subsumida presenta un alto acoplamiento entre percepción y acción, produciendo alta
reactividad, una capacidad muy pobre de aprendizaje y adaptabilidad a nuevos entornos, sin representación interna
y con la estrecha necesidad de que los patrones de comportamientos estén conectados a priori. Varias extensiones
han intentado agregar características de representación interna y arbitraje de comportamientos, como la
Arquitectura de Control Basada en Comportamientos [2] y los Sistemas de Activación Hormonal [3], pero la
necesidad de pre-conectar los comportamientos y la característica de ausencia de aprendizaje aún persisten,
convirtiendo la arquitectura aplicable y útil solo para entornos específicos y pre-configurados.
La investigación se ha enfocado en el desarrollo de una arquitectura hibrida multicapa para agentes cognitivos que
se basa en la teoría de subsumción. Adicionalmente este trabajo propone un Modelo Evolutivo el cual permite al
agente auto-configurar y adaptar sus capas de procesamientos a través de la definición de número de capas,
comportamientos y procesos de inhibición y supresión. Esto significa que cada agente en lugar de tener una
estructura pre-configurada de capas y procesos, éste posee un proceso evolutivo artificial que es responsable de
definir dicha estructura multicapa. Por otro lado, en lugar de emplear en cada capa un sistema de Máquinas de
Estados Finitas Aumentadas - MEFA) como lo define la teoría de subsumción [1], donde no se realiza una
representación interna del mundo, se propone que cada comportamiento sea controlado por un Sistema de
Aprendizaje de Máquina – SAM – bio-inspirado (seleccionado de un repertorio donde ocurre una co-evolución de
comportamientos) el cual aprende del entorno y genera un modelo del mundo mediante un aprendizaje reforzado y
no supervisado.
El presente artículo está organizado de la siguiente manera. La sección 2 presenta una breve descripción de algunos
conceptos fundamentales empleados en el trabajo. La aproximación evolutiva para auto-configurar agentes
cognitivos es detallada en la sección 3. En la sección 4 se discuten los resultados experimentales y las propiedades
emergentes analizadas. Finalmente las conclusiones son presentadas en la sección 5.
2. Fundamentos Teóricos
Para el desarrollo de la arquitectura cognitiva propuesta, se presentan en esta sección algunos fundamentos acerca
de las técnicas basadas en la teoría evolutiva artificial y algunas técnicas de inteligencia computacional bioinspirada. Primero se describe la teoría del procesamiento multicapa en la cual se basa la arquitectura propuesta,
luego son introducidos varios SAM usados en cada capa de la arquitectura hibrida. Finalmente, se describe el
mecanismo de Programación de Expresiones Genéticas -PEG- y su capacidad para evolucionar y auto-configurar la
arquitectura subsumida de cada agente.
2.1. Procesamiento Multicapa
En 1986, R.A. Brooks [1] propuso una estructura multicapa en robótica que descompone el problema en un
conjunto de comportamientos que llevan a cabo tareas asíncronas, lo que él llamo Arquitectura Subsumida. De
acuerdo con Brooks, los comportamientos operan de forma local y asíncrona y están débilmente acoplados uno a
otro. En contraste al modelo convencional, cada uno de los comportamientos está típicamente en comunicación
directa con el mundo [4]. Brooks plantea en [1] que en la arquitectura subsumida, varios subconjuntos de
comportamientos exhiben alguna competencia parcial en la solución de una versión simple de todo el problema. No
obstante, la solución para una versión más compleja del problema puede hallarse mediante el incremento gradual de
comportamientos nuevos e independientes a los ya existentes. Los conflictos potenciales entre las acciones de los
comportamientos son resueltos empleando un ordenamiento jerárquico a priori de los nodos supresores.
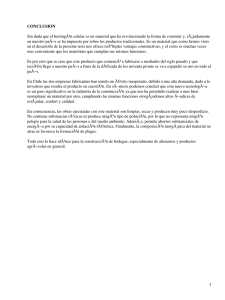
Por otro lado, Brooks propone [1] que las capas de la arquitectura subsumida estén compuestas de Máquinas de
Estado Finitas Aumentadas (MEFA) con temporizadores. Cada MEFA tiene una señal de entrada y otra de salida
(ver Figura 1). Cuando la entrada de una MEFA excede un umbral predeterminado, el comportamiento de esa
MEFA es activado. Las entradas de las MEFAs provienen de los sensores y las salidas son enviadas a los
actuadores del agente. Cada MEFA también acepta una señal de supresión o de inhibición que le permite a los
comportamientos subsumir a los otros de tal manera que el sistema pueda producir un comportamiento coherente.
3
Este trabajo no propone el uso de MEFAs, en su lugar se desarrolla una Arquitectura Subsumida híbrida que
emplea diferentes técnicas de aprendizaje de máquina y técnicas bio-inspiradas en cada capa para crear
representaciones internas del mundo y para aprender del propio entorno de una manera autónoma.
entradas
estados
MEFA
salidas
Figura 1. Arquitectura Subsumida típica
2.2. Sistemas Clasificadores Extendidos (SCE)
Según Wilson [5], un sistema clasificador es un sistema de aprendizaje de máquina que pretende ganar
retroalimentación de su entorno basándose en un conjunto de reglas del tipo condición-acción llamadas
clasificadores. Mediante un proceso Darwiniano, los clasificadores que han obtenido mayor refuerzo son
seleccionados y propagados sobre aquellos con menor actuación, incrementando así el desempeño del sistema. La
idea de los Sistemas Clasificadores se debe a Holland [6], quien propuso una arquitectura que incluye la
generalización de las condiciones de los clasificadores, envío interno de mensajes, refuerzo e integridad
computacional. Sin embargo, a pesar de las numerosas investigaciones, el desempeño del sistema tradicional ha
sido mezclado y se han dado pocos avances en la teoría inicial.
En [5] Wilson propone los Sistemas Clasificadores Extendidos (SCE). Los SCE son una extensión reciente de los
sistemas clasificadores de aprendizaje (SCA) que difieren en varios aspectos de los tradicionales SCAs. Wilson
primero afirma [5] que en los SCE, la aptitud del clasificador se basa en la precisión que tiene la predicción del
pago del clasificador en lugar de la predicción en si. Segundo, el Algoritmo Genético toma lugar en el conjunto de
acciones y no en toda la población. Finalmente, en contraste a los SCA tradicionales, los SCE no tienen lista de
mensajes y tienen mayor aplicabilidad aprendiendo en entornos markovianos (algunas extensiones de SCE emplean
registros internos y han mostrado ser una promesa en entornos no markovianos).
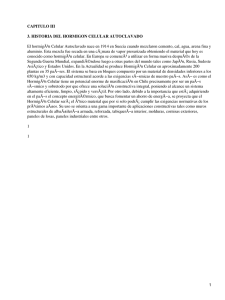
En un intento de mantener el modelo típico SCA, Wilson propone que el entorno sea quien provea como entrada al
sistema una serie de situaciones sensoriales σ (t) ∈ {1, 0}L, donde L es el número de bits en cada situación. Como
respuesta, el sistema ejecuta acciones α (t) ∈ {a1, …, an} sobre el ambiente. Cada acción resulta en un refuerzo
escalar ρ (t) (posiblemente cero). El sistema de refuerzo determina la recompensa de acuerdo con la entrada
ambiental actual y la acción que fue ejecutada. La figura 2 ilustra la interacción del entorno y el sistema de refuerzo
en el SCE.
Sistema
Refuerzo
Ambiente
Fin del
problema?
SCE
Figura 2. Interacción del SCE con el Entorno y el Sistema de Refuerzo [5]
4
2.3. Sistemas Inmunes Artificiales (SIA)
Inspirados en la teoría inmunológica, los Sistemas Inmunes Artificiales (SIA) [7] son sistemas adaptativos basados
en modelos y principios que emulan los mecanismos de defensa observados en la naturaleza. Los investigadores
están interesados en varias de las propiedades inmunológicas de las cuales se ha generado un número significativo
de modelos teóricos y computacionales que solucionan problemas del mundo real: auto-identidad, diversidad,
robustez, tolerancia a fallos, reconocimiento de patrones y auto-aprendizaje.
En 1974, N.K. Jerne argumentó en [8] que un sistema inmune biológico es una red regulada de células y moléculas
que poseen un comportamiento dinámico, incluso en ausencia de cualquier estimulo externo (antígenos). Estas
redes inmunes artificiales son modelos que emulan la Arquitectura de Jerne. Un conjunto de antígenos que se
corresponden con un conjunto de datos de entrada en la mayoría de las aplicaciones de redes artificiales,
estimularán una red inmune a ir a través de un proceso dinámico hasta alcanzar algún tipo de estabilidad. AiNet [9]
es un modelo basado en los principios inmunes que implementa una red inmune discreta que fue desarrollada para
aplicaciones de compresión y conglomerado de datos y más adelante para optimización.
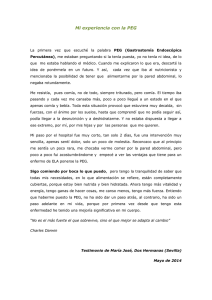
Este artículo referencia el trabajo realizado por D. Romero [9] quien propone un Sistema Inmune Cognitivo
Artificial (ACIS). Un algoritmo ACIS combina la estructura de AiNet y técnicas de aprendizaje de máquina
reforzado. Particularmente, se han explotado las capacidades de AiNet para tratar conglomerado de datos,
aprendizaje y optimización. Para el desarrollo del trabajo, el algoritmo ACIS ha sido usado como un sistema de
aprendizaje de tareas de reconocimiento, clasificación, optimización y toma de decisiones. En la figura 3 se muestra
el algoritmo de ACIS.
Figure 3. Diagrama de Flujo del Sistema Inmune Artificial propuesto (ACIS) [9]
2.4. Sistemas Neuro Coneccionistas de Aprendizaje-Q (SCQ)
El algoritmo de aprendizaje-Q propuesto por Watkins en 1989 [10] pertenece a un grupo de algoritmos de
aprendizaje por refuerzo. De acuerdo con Watkins [10] la principal característica de esta técnica es que durante el
proceso de aprendizaje el sistema no permite ver cómo actúa en una situación específica. En su lugar, el aprendizaje
se realiza por prueba y error usando señales de recompensa y castigo. Como resultado del algoritmo de aprendizajeQ, aparece una función de evaluación de parejas estado-acción que tienen una representación tabular. Cuando el
espacio de estados-acciones es grande, resulta difícil encontrar una de las condiciones de convergencia del
algoritmo de aprendizaje-Q (múltiple aprobación de todos los posibles pares estado-acción) y son requeridos más
recursos para almacenar la tabla de evaluación. Según Kuzmin [11], para solucionar estos problemas,
adicionalmente se deben introducir algunos términos de generalización. Emplear una Red Neuronal de tipo
Perceptron Multicapa (MLP) como una tabla de aproximaciones del aprendizaje-Q, es uno de los posibles términos
de generalización propuestos por Kuzmin. El uso articulado de MLP y del algoritmo de aprendizaje-Q es lo que
Kuzmin llamó sistema Coneccionista Aprendizaje-Q [11].
Según Kuzmin [11] el uso de redes neuronales para la aproximación de valores-Q tiene las siguientes ventajas:
Escalonamiento efectivo para un espacio con entradas de grandes dimensiones.
Generalización para un espacio de estados continuo y amplio.
5
Posibilidad de implementación de hardware en paralelo.
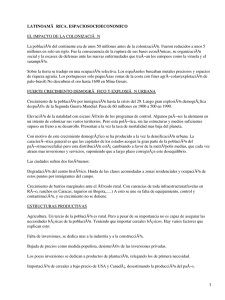
Kuzmin hace uso de la metodología de trabajo con una red neuronal que consiste en aplicar una red neuronal
separada por cada acción, como se ve en la figura 4. Durante cada iteración del algoritmo, el estado actual del
sistema es enviado a las entradas de cada red neuronal, pero los pesos son solamente actualizados para la red cuya
acción fue seleccionada.
Figura 4. Aproximación de la función-Q por un conjunto de Redes Neuronales [11]
2.5. Programación de Expresiones Genéticas PEG
La Programación de Expresiones Genéticas –PEG- propuesta por Ferreira [12] es, como los Algoritmos Genéticos ó
la Programación Genética, un algoritmo genético ya que emplea poblaciones de individuos, los selecciona de
acuerdo a su aptitud, e introduce variación usando ciertos operadores genéticos. De acuerdo con Ferreira [12], la
diferencia fundamental es la naturaleza de los tres algoritmos. En PEG, los individuos son codificados como
cadenas lineales de longitud fija (el genoma o cromosomas) los cuales luego son expresados como entidades no
lineales de diferentes tamaños y formas (ej, representaciones en diagramas simples o árboles de expresión). La
interacción de cromosomas (replicadores) y los árboles de expresión (fenotipo) en PEG implica un sistema de
translación inequívoca para convertir el lenguaje de los cromosomas al lenguaje de árboles de expresión (AE). La
organización estructural de los cromosomas PEG permite una verdadera relación funcional genotipo/fenotipo, tanto
así que cualquier modificación hecha en el genoma resulta en programas o AEs correctos sintácticamente.
Ciertamente, el variado conjunto de operadores genéticos desarrollados por Ferreira [12] para introducir diversidad
genética en las poblaciones de PEG siempre producen AEs válidos. Además, PEG es un sistema de vida artificial
establecido más allá del umbral replicador, capaz de adaptarse y evolucionar.
Ferreira argumenta [12] que las ventajas de un sistema como PEG son derivadas de la naturaleza, pero las más
importantes podrían ser enfatizadas. Primero, los cromosomas son entidades simples: lineales, compactas,
relativamente pequeñas y fáciles de manipular genéticamente (replicar, mutar, recombinar, transponer, etc.).
Segundo, los AEs son exclusivamente la expresión de sus respectivos cromosomas; estas son las entidades sobre las
cuales la selección actúa y, de acuerdo a su aptitud, son seleccionadas para reproducirse con cierta modificación.
Durante la reproducción, son los cromosomas de los individuos, no los AEs, quienes son reproducidos con
modificación y transmitidos a la siguiente generación.
En este trabajo se propone un algoritmo PEG para evolucionar individuos (agentes) y sus estructuras multicapa,
identificando tanto predicados de aplicabilidad para la activación de comportamientos, como también las jerarquías
de resolución de conflictos para el arbitraje de comportamientos. Como un ejemplo simple, suponer que existen tres
comportamientos con prioridad estrictamente decreciente. Los predicados de aplicabilidad y los nodos supresores
de estos tres comportamientos son equivalentes a la siguiente composición de funciones condicionales del tipo IFTHEN
(IF PA1 COMPORTAMIENTO1)
(IF PA2 COPORTAMIENTO2)
(IF PA3 COMPORTAMIENTO3)
6
En particular, si el primer predicado de aplicabilidad (PA1) es satisfecho, entonces COMPORTAMIENTO1 es
ejecutado. De lo contrario, si PA2 es satisfecho, COMPORTAMIENTO2, es ejecutado. De lo contrario, el
comportamiento con menor prioridad (COMPORTAMIENTO3) es ejecutado. En la aproximación propuesta, el
mecanismo PEG se encargará de definir los predicados de aplicabilidad y las reglas condicionales necesarias para
construir las capas de comportamientos en cada agente.
3. Aproximación híbrida evolutiva para Agentes Cognitivos
Con el propósito de diseñar una arquitectura hibrida, auto-configurable, auto-organizativa, escalable, adaptable y
evolutiva para agentes cognitivos que exhiban comportamientos emergentes y capacidades de aprendizaje, se
expone a continuación el trabajo propuesto. Considérese como ejemplo, un entorno virtual donde existen múltiples
agentes interactuando con objetos, alimento, y con otros agentes, surge a partir de ello algunas restricciones y
preguntas evidentes:
Cambios en las condiciones ambientales, ej. Con relación a los objetos: cantidad, tipo, ubicación, tamaño,
etc., con respecto a otros agentes: intenciones, deseos, metas, etc.
Existe un número variable y dinámico de comportamientos deseados: evitar- obstáculos, deambular,
alimentarse, cazar, huir-de-depredadores, etc.
¿Cuántos comportamientos pueden ser integrados en un agente y cómo el agente puede arbitrar esos
comportamientos?
¿Cuándo un agente sabe si tiene que inhibir o suprimir un comportamiento si no posee un predicado de
aplicabilidad preestablecido que defina esto?
¿Cómo un comportamiento que controla una de las capas de procesamiento de un agente puede generar un
modelo del mundo, interactuar con el ambiente a través de los sensores y actuadores, aprender de su
interacción con el ambiente y recibir refuerzo por sus acciones, de tal manera que el estado interno del
mismo evolucione?
Estas preguntas dirigen la aproximación propuesta de una arquitectura híbrida evolutiva para agentes cognitivos,
como se observa en la figura 5.
Agente
Proceso Evolutivo
PEG
Comportam.
Behaviour n n
Behaviour n
…
Comportam. 4
Comportam. 3
Comportam. 2
Comportam. 1
otros
…
SCA
SCQ
SIA
SCE
Sistemas
SistemasAprendizaje
AprendizajeMáquina
Máquina
Predicados
aplicabilidad,
arbitraje
comportam.,
jerarquía de
capas…
Capas
Capasde
deProcesamiento
Procesamiento
Arquitectura Subsumida
Comport. A
Mecanismo
Co-evolutivo
De
Comport.
Sistema Multi-Agentes
Figura 5. Arquitectura hibrida evolutiva para Agentes Cognitivos
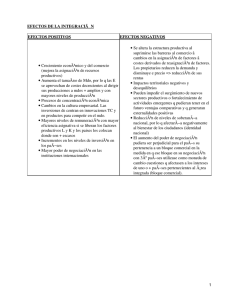
La figura 5 muestra una arquitectura híbrida que intenta abordar la solución a las preguntas arriba descritas. Se
puede observar que cada agente posee una arquitectura interna basada en principios de subsumción pero con
algunas variaciones:
Cada capa de procesamiento está conectada aleatoriamente a un SAM (como puede ser un SCE, NCQ, SIA,
SCA o escalable a otros) el cual reemplaza las típicas MEFAs propuestas en la arquitectura de Brooks [1]
Después de ser entrenado el agente, cada comportamiento es enviado a un repertorio de acuerdo a su tipo
donde un mecanismo evolutivo es aplicado de tal modo que cada comportamiento no solo aprende de manera
7
local dentro del agente sino que además evoluciona de manera global en el repertorio, y así luego podrá ser
seleccionado por otro agente en la siguiente generación, y se repite el ciclo de aprendizaje-evolución.
Existe un proceso evolutivo controlado por un algoritmo PEG, el cual está encargado de auto-configurar el
agente definiendo el número de capas, los comportamientos que el agente empleará, las conexiones y
jerarquías entre éstos (inhibición, supresión y agregación): “arbitraje de comportamientos”, predicados de
aplicabilidad donde se determina cuál comportamiento debe ser activado en cierta situación, y finalmente un
tiempo de activación del comportamiento controlado por un temporizador.
3.1. Arquitectura Híbrida de Aprendizaje: Comportamientos dirigidos por SAMs
Cada capa de comportamiento en la arquitectura multicapa es asociada a un SAM, lo que le da la característica de
híbrida, permitiendo que la arquitectura no sea solo reactiva, ya que cada comportamiento podrá ejercer procesos
deliberativos empleando el conocimiento adquirido. Además, este mecanismo ofrece plasticidad a la arquitectura
permitiendo que cada comportamiento “aprenda” de manera independiente, paralela y no supervisada, a través de
su interacción con el ambiente, generando representaciones internas, reglas y conocimiento específico y
generalizado. Este mecanismo se favorece de las características de los SAMs: robustez, tolerancia a fallos, uso de
técnicas bio-ispiradas, adaptabilidad y no requieren la previa definición del conocimiento (aprendizaje no
supervisado).
Consecuentemente, existen dos principios formulados por Stone [13] que han motivado la propuesta de una
aproximación al aprendizaje por capas:
El aprendizaje por capas está diseñado para dominios muy complejos donde se busca realizar una relación de
aprendizaje directa entre los sensores del agente y sus actuadores. Por tal motivo, la aproximación de
aprendizaje por capas consiste en dividir un problema en varias capas de comportamientos empleando SAMs
en cada capa. El aprendizaje por capas usa una aproximación incremental de abajo a arriba (bottom-up) para
lograr la descomposición jerárquica.
Los SAMs son usados como una parte central del aprendizaje por capas para la explotación de datos con el fin
de entrenar y/o adaptar el sistema en su totalidad. Los SAMs son útiles para entrenar comportamientos que
son difíciles de ajustar manualmente.”
Arquitectura Multicapa
entradas
Sistema Aprendizaje de Máquina
Entrada
sensorial
Procesamiento interno
Comporta. A
Salida
actuadores
Comporta. B
Comporta. C
Comporta. D
…
SCE
SIA
SCQ
otros
Figura 6. Arquitectura multicapa conectada con una interfaz para diferentes implementaciones de SAMs
Las entradas sensoriales de cada SAM leen la distancia y tipo de objeto sensado alrededor del agente mientras que
las salidas del actuador indican las acciones que el agente debe ejecutar, ej. girar-derecha, girar-izquierda,
retroceder, avanzar, saltar, parar, etc. De acuerdo con esto, se propone una interfaz común para todos los SAMs
(SCE, SIA, SCQ, LCS, etc.) de esta forma, aunque cada SAM tenga un proceso interno diferente, todos tienen una
estructura similar que le permite al sistema ser escalable mediante la adición de nuevos SAMs si se requiere y
conectándolos de una manera fácil con cada capa de comportamiento de la arquitectura del agente, como se muestra
en la figura 6.
3.2. Co-evolución de comportamientos híbridos: Evolucionando globalmente
Se propone un mecanismo co-evolutivo basado en [14] para evolucionar cada tipo de comportamiento de forma
separada en su propio repertorio genético. La mayoría de las aproximaciones evolutivas emplean una sola población
8
donde ocurre la evolución, pero este mecanismo propone en su lugar que los comportamientos sean discriminados
en categorías y evolucionados paralelamente sin ninguna interacción entre categorías.
Primero, cada agente define un conjunto específico de comportamientos que se construyen sobre una estructura
multicapa. Por cada comportamiento requerido por el agente, se selecciona una instancia del repertorio de
comportamientos (esta instancia está conecta con un SAM específico). Subsecuentemente cada agente interactúa
con el entorno y cada uno de sus comportamientos aprende un conjunto de reglas y genera una base de
conocimiento propia. Después de cierto período de tiempo cada comportamiento es devuelto a su repertorio y luego
un mecanismo co-evolutivo es activado. Por cada repertorio de comportamientos se aplica un método de selección
probabilística donde aquellos comportamientos que han obtenido el mejor desempeño (aptitud) tendrán mayor
probabilidad de reproducirse. Luego, se aplica el operador genético de cruce entre cada par de comportamientos
seleccionados: una porción del aprendizaje adquirido por cada comportamiento (a través de su SAM) es
seleccionada e intercambiada entre uno y otro comportamiento, produciendo herencia de experiencia y
conocimiento congénito. Finalmente, nuevas reglas aleatorias son generadas hasta completar el tamaño máximo que
puede tener cada comportamiento en su propia base de conocimiento, de tal forma se produce un nuevo par de
comportamientos y son dejados en su repertorio correspondiente para que sea seleccionado por un agente en la
siguiente generación.
3.3. Arquitectura auto-configurable: Arbitraje de comportamientos
Si cada agente posee un conjunto arbitrario de comportamientos, ¿cómo determinar la interacción entre éstos, los
niveles de jerarquía, los procesos de subsumción (inhibición, supresión y agregación) y el número de capas
necesarias para un procesamiento adecuado? Estas preguntas son resueltas a continuación.
La estructura interna multicapa de cada agente es descompuesta en componentes atómicos que pueden ser
estimados y usados para encontrar la organización óptima de comportamientos durante el tiempo de vida del agente
[14]. El principal objetivo es que el agente, de una manera automática, configure su propia estructura de
comportamientos. El modelo PEG propuesto por Ferreira [12] es usado para evolucionar las estructuras internas de
cada agente y generar un arbitraje válido de comportamientos.
El algoritmo PEG propuesto emplea dos conjuntos: uno de funciones y otro de terminales. El conjunto de funciones
propuesto es: AND, OR, NOT, IFMATCH, IFOBJECT, INHIBIT y SUPRESS. Las funciones AND, OR y NOT
son operadores lógicos usados para agrupar o excluir subconjuntos de objetos, comportamientos, etc. La función
condicional IFMATCH es un predicado de aplicabilidad típico que se corresponde con una situación específica del
problema. Esta función tiene cuatro argumentos, los primeros tres argumentos pertenecen al antecedente de la regla:
el primero indica qué objeto es sensado, el segundo qué sensor se activó y el tercero es el comportamiento actual
que está ejecutándose en el agente. Si los tres primeros argumentos son aplicables entonces el cuarto argumento, el
consecuente de la regla, es ejecutado. El cuarto argumento puede ser una función INHIBIT o SUPRESS, o quizás
una función AND/OR si son necesarios más elementos en la condición (ej: un conjunto de comportamientos
inhibiendo otro conjunto de comportamientos). Las funciones INHIBIT y SUPRESS tienen dos argumentos
(ComportamientoA, ComportamientoB) e indica que ComportamientoA inhibe/suprime ComportamientoB. Por
otro lado, el conjunto de terminales está compuesto por el subconjunto de comportamientos, el subconjunto de
elementos ambientales (objetos, agentes, alimento, etc.) y finalmente por el subconjunto de sensores del agente.
Adicionalmente, se agrega un comodín de tal manera que cualquier sensor, comportamiento u objeto pueda ser
referido.
Cada agente tiene un cromosoma con información acerca de su propia estructura, ej. el agente A puede tener un
cromosoma como: [IFMATCH, muro, buscar-comida, sensor1, INHIBIT, evadir-obstáculo, AND, deambular,
buscar-alimento], y este cromosoma resulta ser una regla válida porque tanto el antecedente como el consecuente de
la función IFMATCH empareja con cada tipo de argumento requerido: [{IFMATCH}, {objeto},
{comportamiento}, {sensor}, {INHIBIT / SUPRESS}, {comportam.}, {comportam.}]. El cromosoma se traduciría
en la siguiente regla:
IFMATCH:
Hay un muro
Está activado el comportamiento buscar-alimento
9
Lectura del sensor1
THEN:
evadir-obstáculo INHIBIT deambular AND buscar-alimento
Analizando esta regla se puede inferir que el agente posee tres capas de comportamientos: evadir-obstáculos,
deambular y buscar-alimento, y los dos últimos son inhibidos por el primero cuando el sensor1 identifica un muro
en frente del agente. Sin embargo, estos cromosomas (predicados de aplicabilidad) no tienen siempre una sintaxis
válida, por lo tanto el mecanismo PEG es empleado para evolucionar el cromosoma hasta que se convierta en una
regla sintáctica válida. Cada individuo (agente) tiene un cromosoma multigénico, lo cual significa que cada
cromosoma tiene un conjunto de genes donde cada gen es un predicado de aplicabilidad como el del ejemplo, por
tanto el agente tiene múltiples reglas (genes) como parte de su genotipo y cada uno es aplicado de acuerdo a la
situación que estimula el antecedente de la regla. Cada gene es convertido en un árbol de expresión y luego un
conjunto de operadores genéticos es aplicado entre los genes del mismo agente como también con genes de otros
agentes [12]: selección, mutación, transposición de origen, transposición genética, recombinación en uno y dos
puntos, y recombinación genética. Después de cierto número de generaciones evolutivas, se generan
configuraciones de agentes válidos y mejor adaptados. Se emplea el método de la ruleta para la selección de
individuos teniendo en cuenta la probabilidad de selección que se deriva de su propia aptitud. La aptitud representa
que tan eficiente ha sido la interacción con el ambiente durante el tiempo de vida del agente.
3.4. Propiedades emergentes de la Arquitectura
Brooks postula en su artículo [3] la posibilidad de que la inteligencia pueda emerger de un conjunto de
comportamientos acoplados pobremente, y que ciertas propiedades emergentes resultan debido a la compleja
dinámica de las interacciones entre comportamientos simples y que dicha emergencia es en gran magnitud,
accidental. La arquitectura propuesta articula un conjunto de comportamientos que por un lado aprenden, de manera
independiente y paralela, las condiciones ambientales, y por otro evolucionan dentro de un repertorio categorizado.
Cada comportamiento simple puede ser aplicado a un subconjunto de situaciones específicas pero no a todo el
espacio del problema, sin embargo la interacción entre los comportamientos de un mismo agente permite cubrir
múltiples conjuntos de estados del problema, lo cual genera ciertas características en el agente: robustez,
redundancia en el conocimiento adquirido, tolerancia a fallos y un gran nivel de plasticidad, de tal manera que se
hacen evidentes ciertas propiedades emergentes en el individuo y dentro de la sociedad (Sistema multi-agentes).
Se puede decir entonces, que las propiedades emergentes aparecen desde tres perspectivas en una aproximación de
abajo a arriba (bottom-up):
Atómica: en cada comportamiento de la arquitectura multicapa, cuando un SAM asociado aprende de su
interacción con el ambiente cómo relacionar las entradas sensoriales con las salidas de los actuadores de
manera automática.
Individual: cuando el agente auto-configura su estructura interna (cromosoma), jerarquía y arbitraje de
comportamientos a través de un proceso evolutivo dirigido por PEG.
Social: cuando un mecanismo de co-evolución de comportamientos híbridos es aplicado a todos los
comportamientos de los agentes, causando que los comportamientos aprendan no solamente entre ellos
mismos empleando el SAM asociado sino también cooperando con otros agentes y comunicando el
conocimiento adquirido entre ellos.
Es importante resaltar que la emergencia en las diferentes perspectivas, desde la atómica hasta la social, provoca
una emergencia global del sistema, donde se espera que cierto nivel de inteligencia emane.
4. Propiedades emergentes de la arquitectura
Con el fin de evaluar la arquitectura propuesta, se consideraron los siguientes aspectos en cada nivel:
Con respecto a los SAMs:
Tasa de convergencia del aprendizaje en cada sistema propuesto: SCE, SIA, SCQ y SCA.
Generalización y robustez (reacciones a los cambios ambientales)
Con respecto a la co-evolución de comportamientos híbridos:
Tasa de convergencia de la evolución y del aprendizaje en cada repertorio de comportamientos.
10
Diversidad del conocimiento adquirido en cada repositorio de comportamientos
Con respecto del algoritmo PEG para la auto-configuración de condiciones de subsumción y arbitraje de
comportamientos:
Variación de la tasa de éxito vs. el número de genes.
Progresión del incremento de aptitud de la población
Tasa de convergencia de genes bien formados sintácticamente
Con respecto a todo el sistema:
Análisis de las arquitecturas de subsumción obtenidas por los agentes y las propiedades emergentes
después de cierto número de generaciones (visión holística).
Se emplea para las pruebas de la experimentación un entorno de vida artificial llamado Animat (animal + robot) [6].
El entorno simula agentes virtuales compitiendo por obtener alimento, agua, evadiendo obstáculos, cazando,
huyendo de depredadores, etc. como se propuesto anteriormente en O. Romero [15]. Este entorno animat fue
seleccionado por ser más apropiado en la observación de comportamientos emergentes pero no porque sea el único
entorno aplicable.
Cada animat controlado por un agente, dispone de un conjunto de 14 sensores de proximidad (ver figura 7)
simulando un sentido visual limitado. 12 sensores leen una zona segura y los otros 2 sensores leen un área más
reducida llamada la zona de peligro (para evitar colisiones), como fue propuesto por D. Romero [9].
Zona Segura
2
3
1
4
5
12
11
Objeto
sensado
Zona Peligro
6
10
9
8
7
Animat
Figura 7. Distribución de sensores en el animat
Adicionalmente, se provee un entorno simulado con objetos, alimento, depósitos de agua, animats, obstáculos,
trampas, etc. Como se observa en la figura 8.
Muro
(obstáculo)
Animats
Depósito
agua
Árbol (obstáculo)
Animats
Alimento
Figura 8. Entorno simulado Animat
Consecuentemente, la experimentación se basó en la observación de algunas características de identidad en los
animats, ej. Se buscaba que algunos agentes animat se comportaran como depredadores y otros como presas. Los
depredadores podrían incluir comportamientos como evadir-obstáculos, buscar-agua, perseguir-presas, cazarpresas, etc. Y los animats presas podrían incluir comportamientos como evitar-obstáculos, buscar-alimento, buscaragua, esconderse, huir, etc. Sin embargo, las propiedades emergentes pueden variar de acuerdo al entorno y al
conjunto de comportamientos diseñados a priori. A continuación se presentan los resultados obtenidos.
11
4.1. Tasa de convergencia del aprendizaje y nivel de generalización de cada SAM
En este experimento se diseñó un ambiente donde el animat tenía que interactuar con éste empleando un SAM
diferente cada vez. Este escenario consiste en una malla rectangular bidimensional que simula un laberinto. Dentro
de la malla habrá un animat (representado por un conejo) que tendrá que evadir obstáculos y seguir un camino de
alimento iterativamente hasta que haya aprendido el patrón [15]. Cada 200 iteraciones se aplican ciertos cambios al
ambiente y el animat tendrá que aprender el nuevo patrón y realizar generalizaciones de conocimiento de manera
adaptativa. La figura 9 muestra algunas variaciones del ambiente.
a)
b)
c)
Figura 9. a) ambiente inicial; b) variación suave en el ambiente; c) variación drástica en el ambiente
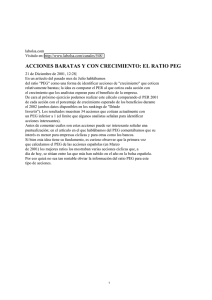
La figura 10 muestra un gráfico de la curva de aprendizaje de los siguientes SAMs: SCE, SIA, SCA, SCQ simple y
multicapa. La convergencia del aprendizaje en el experimento se evalúo empleando los ambientes de la figura 9 y
los parámetros de la tabla 1:
Parámetros
SCE
Impuesto Vida
Impuesto Apuesta
BrPow
Nº clonaciones x regla
Nº mutaciones x regla
Umbral de Semejanza
Alpha α
Beta β
Delta δ
Gamma γ
Lamda λ
Nº capas red neuronal
Número de Épocas
Nº ejecuciones x época
SIA
1
2
0.1
0.2
0.1
0.95
-
SCQ
SCA
0.005
0.003
4
2
0.8
0.1
0.02
0.8
0.8
5
1000
20
0.005
0.003
1.0
1
1
-
Tabla 1. Parámetros de ejecución de los SAMs
700
600
SCA
SIA
SCQ - Simple
SCE
SCQ - Multicapa
Iteracioness
500
400
300
200
100
0
1
51
101
151
201
251
301
351
401
451
501
551
601
651
701
751
801
851
901
951
Epocas
Figura 10. Curva de aprendizaje de cada SAM
La figura 10 muestra los diferentes SAMs convergiendo rápidamente después de la época número 20 en promedio
para el primer patrón, sin embargo cuando se ejecuta algún cambio en el ambiente (cada 200 iteraciones), cada
SAM registra un pico y luego tienden a converger nuevamente después de 5 a 7 épocas. Esto demuestra claramente
la capacidad de los SAMs para generalizar el aprendizaje previo adquirido y para aplicarlo a nuevas situaciones, en
este caso, el aprendizaje de un nuevo patrón ambiental. Además de esto, en la figura 10 se observa que los SAMs de
tipo SIA y SCQ son más adaptativos y robustos que los otros ya que convergen más rápidamente, a una tasa del
12
12%, cuando se introducen cambios al patrón ambiental aprendido.
4.2. Tasa de convergencia de aprendizaje y evolución en cada repertorio de comportamientos
El objetivo de este experimento es examinar si la aptitud de cada repertorio de comportamientos se incrementa
gradualmente hasta alcanzar un punto de convergencia mientras el proceso evolutivo subyace. En este experimento
se estudiaron 3 repertorios de comportamientos: “buscar-comida”, “evitar-obstáculos” y “escapar-dedepredadores”, y se realizaron mediciones de del promedio de la aptitud en cada repertorio de comportamientos.
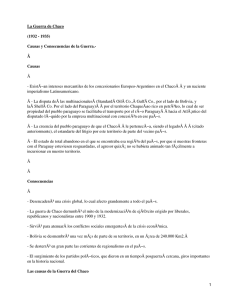
El experimento de convergencia del aprendizaje se llevó a cabo con los parámetros de la tabla 2. La curva de
aprendizaje de la evolución en paralelo de los comportamientos se muestra en la figura 11.
Parámetros
Número de Épocas
Nº ejecuciones x época
Probabilidad de cruce
Probabilidad de Mutación
Tasa mutación η
Tasa mutación θ
Tasa mutación κ
Tasa mutación γ
Valor
50
50
0.7
0.3
0.85
0.25
1.03
0.01
Tabla 2. Parámetros mecanismo co-evolutivo
En cada época, se realiza el cálculo del promedio de aptitud en 50 ejecuciones de evolución en el repertorio. Se
observa, en la figura 11, que el comportamiento buscar-alimento tiene una curva de aprendizaje más lenta en
contraste con el comportamiento evadir-obstáculos y por otro lado el comportamiento evadir-obstáculos tiene el
aprendizaje con más alteraciones y picos en comparación con los otros dos comportamientos que tienen curvas más
suavizadas debido a las diferencias en las condiciones ambientales de cada repertorio de comportamientos (número
de refuerzos positivos por unidad de tiempo, impacto de los refuerzos negativos, dispersión de obstáculos, etc.). Sin
embargo los 3 repositorios intentaron converger y alcanzar cierta estabilidad en un número aproximado de épocas
(después de 30 épocas), lo que significa que la evolución fue efectiva y que cada repertorio de comportamientos ha
establecido una base de conocimiento coherente obteniendo un consenso entre sus propias instancias de
comportamientos acerca de lo que el “comportamiento debería hacer”.
4000
3500
Aptitud Promedio
3000
2500
2000
Comport. EO
Comport. BA
Comport. ED
1500
1000
500
0
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
35
37
39
41
43
45
47
49
51
Epocas
Figura 11. Tasa de convergencia de la evolución en 3 repertorios de comportamientos
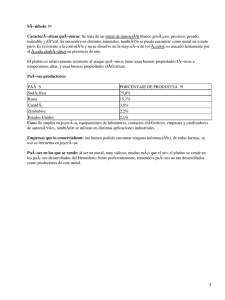
4.3. Variación del éxito vs. Número de genes en PEG
Con el propósito de definir el número de genes que cada cromosoma debería tener, múltiples pruebas
experimentales se realizaron incrementando gradualmente el número de genes. La Tabla 3 muestra los parámetros
13
empleados en el experimento y la figura 12 ilustra la curva de la variación del éxito vs. el número de genes.
Parámetro PEG
Tasa mutación en un punto
Tasa recombinación en un punto
Tasa recombinación en 2 puntos
Tasa recombinación genética
Tasa transposición genética
Tasa transposición de IS
Tasa transposición en Origen
Longitud cabeza cromosoma
Número de individuos
Valor
0.45
0.15
0.15
0.15
0.10
0.10
0.10
10
300
Tabla 3.Parámetros PEG
120
Tasa de Éxito(%)
100
80
60
40
20
0
0
5
10
15
20
25
Número de Genes
Figura 12. Tasa de variación del éxito vs. Número de genes
La figura 12 muestra que la tasa de éxito tiene un alto porcentaje cuando los individuos tienen un cromosoma con
10 u 11 genes. Por tanto se propone emplear cromosomas multigénicos de 10 genes en cada individuo.
2500
Promedio de Aptitud
Mejor Aptitud
Aptitud (Max 2000)
2000
1500
1000
500
0
0
10
20
30
40
50
60
Número de Generaciones
Figura 13. Progresión de la aptitud promedio de la población vs. número de generaciones
Adicionalmente, se analizó la progresión del promedio de aptitud de la población mientras el número de
generaciones era incrementado. Empleando los parámetros PEG de la tabla 3, se presentan en la figura 13 los
resultados de progresión en 50 ejecuciones. En este experimento se encontró una solución perfecta en la
generación12.
14
4.4. Convergencia de genes bien formados sintácticamente
En este experimento, se analizó la progresión del número de estructuras bien formadas sintácticamente
(cromosomas multigénicos) de cada individuo durante el proceso evolutivo. La figura 14 muestra cómo el número
de cromosomas válidos incrementa mientras la población evoluciona a través de las generaciones. El experimento
fue ejecutado con los parámetros de la tabla 3.
350
300
Genes válidos
250
200
150
100
50
0
0
10
20
30
40
50
60
-50
Número de genes
Figura 14. Estructuras multigénicas válidas (cromosomas) a través de generaciones
La figura 14 muestra que se presenta un punto de convergencia (esto es que todos los cromosomas en la población
son válidos) en la generación 27 en promedio. Por tanto, el sistema necesitará entre 25 y 30 generaciones para
evolucionar los individuos en la población.
4.5. Análisis de arquitecturas evolucionadas
Finalmente, después de que todo el sistema multi-agentes ha evolucionado durante un número específico de
generaciones, se han analizado las estructuras finales de los agentes mejor adaptados donde se presentaron
propiedades emergentes.
Generación 0 – Agente 116
INHIBIT
AND
Buscar-agua
IFMATCH
árbol
Buscaralimento
Esconderse
sensor7
SUPRESS
Buscaralimento
Buscaragua
AND
Evadirobstáculos
Figura 15. Fragmento de Genotipo de la arquitectura inicial del agente (Representación en AEs)
Las figuras 15 y 16 muestran el genotipo (Árboles de Expresión AE) y el fenotipo respectivamente de una
arquitectura inicial de un agente escogido aleatoriamente sin ninguna fase evolutiva aún; en contraste, las figuras 17
y 18 muestran el genotipo y fenotipo respectivamente de la arquitectura del mismo agente evolucionada después de
326 generaciones.
15
Buscar-agua
s
i
i
Buscar-alimento
s
Evadir-obstáculos
Esconderse
Figura 16. Fragmento de Fenotipo de la arquitectura inicial del agente
En la figura 16 el cromosoma representa cuatro comportamientos: buscar-agua (b-ag), buscar-alimento (b-al),
evadir-obstáculos (e-o) y esconderse-de-depredadores (e-d), donde b-ag inhibe b-al y e-d suprime e-o, pero existe
un proceso contradictorio cuando b-al intenta suprimir a b-ag y b-al ya ha sido inhibido por b-ag. Esto se soluciona
con la arquitectura evolucionada en la figura 18 la cual propone una nueva estructura agregando el comportamiento
huir-de-depredadores y excluyendo el comportamiento esconderse.
Generación 326 – Agente 116
IFMACTH
OR
muro
OR
árbol
Buscaralimento
sensor1
Huir
INHIBIT
Evadirobstáculos
Huir
AND
AND
Buscaragua
Buscaralimento
Figura 17. Fragmento de Genotipo de la arquitectura evolucionada del agente después de 326 generac.
Como se ilustra en la figura 18, los procesos contradictorios de inhibición/supresión iniciales en la arquitectura del
agente (ver figura 16) se han solucionado, y solo son propuestos por la arquitectura evolucionada, procesos
inhibitorios jerárquicos. Además, se puede deducir también que la arquitectura evolucionada ha reunido un
conjunto específico de comportamientos convirtiendo al agente en un animat con identidad de presa.
Evadir-obstáculos
i
i
i
Huir-depredadores
Buscar-alimento
Buscar-agua
Figura 18. Fragmento de Fenotipo de la arquitectura evolucionada del agente después de 326 generac.
Es importante notar en la arquitectura evolucionada que el comportamiento huir-de-depredadores inhibe los
comportamientos buscar-alimento y buscar-agua, pero si el animat se encuentra huyendo y su sensor7 detecta un
muro o un árbol en frente, entonces el comportamiento huir-de-depredadores es inhibido por el comportamiento
evitar-obstáculos hasta que el obstáculo no esté más en frente del animat, y luego el animat continua con su huida.
Convenientemente se podría decir que ha ocurrido un comportamiento emergente.
Finalmente, el experimento demuestra que la configuración de parámetros específicos en los SAMs, PEG y en el
mecanismo co-evolutivo es requerida para alcanzar cierta robustez, aprendizaje y capacidad de adaptación en todo
el sistema. Si embargo las propiedades emergentes no surgen siempre de una manera rápida, en un 80% de los
experimentos los animats murieron rápidamente sin aprender a sobrevivir.
16
5. Conclusiones
La integración de múltiples Sistemas de Aprendizaje de Máquina (SAM) para el control de comportamientos
empleando una aproximación a una arquitectura subsumida híbrida, en lugar de usar las típicas Maquinas de Estado
Finitas Aumentadas, ha demostrado importantes ventajas en el aprendizaje del agente, haciendo representaciones y
modelos internos del mundo y adaptándose a los cambios ambientales.
Los mecanismos evolutivos empleados en este trabajo, aportaron cierta característica de plasticidad permitiendo al
agente auto-configurar su propia arquitectura multicapa basada en comportamientos; además puede evitar la
creación exhaustiva y extensiva de bases de conocimiento, estructuras multicapa de comportamientos preconfigurados y entornos con condiciones definidas a priori. En su lugar, un agente cognitivo que emplea la
arquitectura propuesta solo necesita interactuar con un ambiente arbitrario para adaptarse a él, realizar funciones de
aprendizaje y tomar decisiones tanto reactivas como deliberativas.
Algunos problemas se enfrentaron cuando se intentaron definir los predicados de aplicabilidad que evolucionarían a
través del algoritmo PEG ya que se debían realizar varias validaciones sobre el conjunto de funciones, y quizás este
trabajo deba hacerse cada vez que la arquitectura se contextualice en diferentes ambientes.
Durante la experimentación resultó tener un alto nivel de complejidad el descubrimiento de propiedades emergentes
debido a la gran cantidad de tiempo que toma la evolución de todo el sistema a pesar de emplear una plataforma
multi-agentes con una configuración distribuida. Quizás, esto sea similar a la evolución natural donde la adaptación
ocurre lentamente y algunas veces produce criaturas pobremente adaptadas y sin vislumbrar emergencia
aparentemente.
En el trabajo futuro se espera continuar trabajando en el diseño de arquitecturas más adaptativas y autoconfigurables, empleando técnicas de lógica difusa en los SAMs para mejorar la lectura de los sensores por
ejemplo. En el futuro, se desea proponer una aplicación concreta de esta investigación en el desarrollo de un
Módulo Cognitivo para Agentes Pedagógicos Emocionales, donde el agente podrá auto-aprender acerca de sus
perspectivas, creencias, deseos, intenciones, emociones habilidades y percepciones.
Agradecimientos
Este proyecto ha recibido el apoyo del Programa Alban, Programa de Becas de Alto Nivel de la Unión Europea
para America Latina, beca No. E05D056455CO”.
A Diego Romero del Departamento de Ingeniería Mecánica y Luis Niño del Departamento de Ingeniería de
Sistemas de la Universidad Nacional de Colombia; a la profesora Angélica de Antonio del Departamento de
Ingeniería de Software de la Universidad Politécnica de Madrid, quienes hicieron numerosas contribuciones en el
desarrollo de ésta investigación
Referencias
[1] R.A. Brooks, A Robust Layered Control System For A Mobile Robot, IEEE Journal Of Robotics And
Automation, RA-2, pages 14-23, 1986.
[2] M.J. Mataric, Behavior-based control: Main properties and implications, Proceedings of the IEEE
International Conference on Robotics and Autonomation, Nice, Francia, pages 2-8, 1992.
[3] R.A. Brooks, How to build complete creatures rather than isolated cognitive simulators, Architectures for
Intelligence, page s225-239, 1991.
[4] J. R. Koza, Evolution of subsumption using genetic programming, Proceedings of the First European
Conference on Artificial Life, Paris, pages 110-119, 1992.
[5] S.W. Wilson, State of {XCS} Classifier System Research, Lecture Notes in Computer Science, 1813, pages 6381, 2000.
[6] J.H. Holland, “Induction, Processes of Inference, Learning and Discovery”, Mich:Addison-Wesley, 1953.
17
[7] L. N. de Castro, J. Timmis, “Artificial Immune Systems: A New Computational Intelligence Approach”, Ed.
Springer, 2002.
[8] N.K. Jerne, The Immune System, Scientific American 229, No. 1, pages 52-60, 1973.
[9] D. Romero, L. Niño, An Immune-based Multilayered Cognitive Model for Autonomous Navigation, IEEE
Congress on Evolutionary Computation, Vancouver, pages 1115-1122, 2006.
[10] C. Watkins, Q-learning, Machine Learning 8, Boston, pages. 279-292, 1992.
[11] V. Kuzmin, Connectionist Q-learning in Robot Control Task, Proceedings of Riga Technical University, pages
112-121, 2002.
[12] C. Ferreira, Gene Expression Programming: A new adaptive algorithm for solving problems, Proceedings on
Complex Systems, forthcoming, 2001.
[13] P.Stone, Layered Learning in Multiagent Systems, (Doctor Thesis CMU-CS-98-187, 1998)
[14] A. Farahmand, Hybrid Behavior Co-evolution and Structure Learning in Behavior-based Systems, IEEE
Congress on Evolutionary Computation, Vancouver, pages 979-986, 2006.
[15] Oscar Romero, Animales artificiales con Sistemas Clasificadores y Algoritmos Genéticos. Revista Ingeniería,
vol 7 No 1, Facultad de Ingeniería - Universidad Distrital, pages 51-63, 2002.