universidad central de venezuela facultad de ciencias maestría en
Anuncio

UNIVERSIDAD CENTRAL DE VENEZUELA
FACULTAD DE CIENCIAS
MAESTRÍA EN MODELOS ALEATORIOS
MODELO ESTOCÁSTICO DE EQUILIBRIO GENERAL (MEEG)
PARA LA CONSTRUCCIÓN DE DENSIDADES A PRIORI DE VAR
BAYESIANOS: UNA APLICACIÓN A LA ECONOMÍA VENEZOLANA
Trabajo de Grado de Maestrı́a presentado ante
la ilustre Universidad Central de Venezuela
por la Prof. Mariela Perdomo León,
para optar al Tı́tulo de Magister Scientiarium
Mención Modelos Aleatorios.
TUTOR: Dr. Daniel Barráez
Caracas, noviembre de 2008
Resumen del Trabajo de grado presentado para optar al tı́tulo de
Magister Scientiarum Mención Modelos Aleatorios
Modelo estocástico de equilibrio general (MEEG)
para la construcción de densidades a priori de VAR bayesianos:
una aplicación a la economı́a Venezolana
Prof. Mariela Perdomo León
Universidad Central de Venezuela
Caracas, noviembre de 2008
En este trabajo se estudia y se implementa en el computador el método de Negro y Schorfheide
para construir densidades “a priori” de un VAR. Las densidades a priori definidas, permiten
estimar la densidad a posterior usando conjugados naturales. Se implementa está técnica con
el fin de efectuar predicciones para la producción, inflación y tasas de interés. Se realizan las
predicciones y se comparan con un VAR frecuentista y un BVAR de Litterman. Las estimaciones
y predicciones se efectuarán para las economı́as de EEUU y Venezuela.
Palabras claves: MEEG, VAR, BVAR, predicciones.
Agradecimientos
En primer lugar agradezco a Dios, porque él me ha permitido realizar todas mis metas a
pesar de los obstáculos que se han presentado en el camino.
A mis padres porque ellos son mi luz y fortaleza, son los que siempre me dan ánimos para
seguir adelante y triunfar.
A mis hermanos, porque siempre me han apoyado en todo lo que he realizado.
Quiero agradecer a mi tutor el Dr. Daniel Barráez, por su colaboración y disposición en la
realización de este trabajo de grado, por sus sabios consejos, por la confianza depositada en
mı́ y sobre todo por su apreciada amistad.
A los profesores del Postgrado en Modelos Aleatorios en especial, la Dra. Glaysar Castro y
el Dr. José Rafael León por darme las herramientas fundamentales en mis estudios de Maestrı́a.
Al Dr. Harold Zavarce por darme la oportunidad de desarrollar mi Trabajo de Grado en la
Oficina de Investigaciones Económicas del Banco Central de Venezuela.
Al personal de la Oficina de Investigaciones Económicas y el Departamento Modelos Económicos del BCV en especial a Jeison Pérez, Roberto Ferrer, Giovanni Guedez y Wendy Bolı́var.
Al Fondo Nacional de Ciencia, Tecnologı́a e Investigación (Fonacit) por financiar mis estudios
de Maestrı́a.
A mis compañeros y amigos del Postgrado en Modelos Aleatorios en especial a Rafael Abreu,
Claudia de la Hoz y Begui Ovando por darme ánimos para continuar y por su apreciada amistad.
Y en general, a todos que de alguna u otra forma me ayudaron en la realización de mi trabajo
de grado.
A mis padres, por ser mis mejores amigos.
Índice
Introducción
1
1. Vectores Autoregresivos (VAR)
3
1.1. Representación reducida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.2. Representación estructural . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.3. Representación en medias móviles . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.4. Vectores Autoregresivos Bayesianos (BVAR) . . . . . . . . . . . . . . . . . . . .
5
1.4.1. Estimación Bayesiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.4.2. Función de Verosimilitud . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.5. Modelo estocástico de equilibrio general (MEEG) . . . . . . . . . . . . . . . . .
8
2. BVAR de Del Negro y Schorfheide
11
2.1. Densidad a Priori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.2. Densidad a Posteriori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
2.3. Algoritmo de Metropolis Hasting . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2.4. El algoritmo combinado de Metropolis - Hasting y Sims . . . . . . . . . . . . . .
17
2.5. Algoritmo de estimación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
2.6. Cálculo de los momentos poblacionales . . . . . . . . . . . . . . . . . . . . . . .
19
2.7. Medias Armónicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
3. Resultados Empı́ricos
28
3.1. Implementación de los modelos VAR y BVAR . . . . . . . . . . . . . . . . . . .
28
3.1.1. Modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
i
3.1.2. Data de EEUU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
3.1.2.1. Implementación del Modelo VAR reducido . . . . . . . . . . . .
29
3.1.2.2. Implementación del Modelo BVAR Litterman . . . . . . . . . .
32
3.1.2.3. Implementación del Modelo BVAR Schorfheide . . . . . . . . .
35
3.1.2.4. Desempeño predictivo de los modelos . . . . . . . . . . . . . . .
38
3.1.3. Data Venezolana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
3.1.3.1. Implementación del Modelo VAR reducido . . . . . . . . . . . .
48
3.1.3.2. Implementación del Modelo BVAR Litterman . . . . . . . . . .
51
3.1.3.3. Implementación del Modelo BVAR Schorfheide . . . . . . . . .
54
3.1.3.4. Desempeño predictivo de los modelos . . . . . . . . . . . . . . .
57
Consideraciones Finales
67
Referencias
68
Apéndices
69
A. Algoritmo de C. Sims
70
B. Programas en matlab
73
C. Gráficos de las Simulaciones
75
C.1. Data EEUU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
C.2. Data Venezolana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
78
ii
Índice de figuras
C.1. Simulaciones de los parámetros 1 (data EEUU) . . . . . . . . . . . . . . . . . .
75
C.2. Simulaciones de los parámetros 2 (data EEUU) . . . . . . . . . . . . . . . . . .
76
C.3. Simulaciones de las autocorrelaciones (data EEUU) . . . . . . . . . . . . . . . .
77
C.4. Simulaciones de los shocks (data EEUU) . . . . . . . . . . . . . . . . . . . . . .
78
C.5. Simulaciones de los parámetros 1(data Venezolana) . . . . . . . . . . . . . . . .
79
C.6. Simulaciones de los parámetros 2 (data Venezolana) . . . . . . . . . . . . . . . .
80
C.7. Simulaciones de las autocorrelaciones (data Venezolana) . . . . . . . . . . . . . .
80
C.8. Simulaciones de los shocks (data Venezolana)
81
iii
. . . . . . . . . . . . . . . . . . .
Introducción
Los modelos estocásticos de equilibrio general (MEEG), son una herramienta ampliamente
utilizada en el modelaje macroeconómico moderno, desde el punto de vista teórico, especı́ficamente en el medio académico (investigación) y por las instituciones diseñadoras y ejecutoras de
polı́ticas macroeconómicas, como por ejemplo, los Bancos Centrales.
Los MEEG, se basan en la noción básica de la economı́a de precios de equilibrio de mercado.
Además, modelan varios mercados de forma simultánea tomando en cuenta las interacciones
entre ellos, en lugar de un único mercado aislado o equilibrios parciales.
Las ventajas de los modelos estócasticos de equilibrio general, en primer lugar, se fundamentan en la Teorı́a Económica, es decir, “están microfundamentados” por lo que permiten
comprender el funcionamiento de una economı́a y tienen la capacidad para modelar complejas
interrelaciones entre las diversas variables económicas. Sin embargo, los MEEG, tienen ciertas
desventajas, dentro las cuales se pueden mencionar las siguientes, poca capacidad predictiva, se
calibran (no se estiman) o son de difı́cil y costosa estimación, además son complejos y requieren
sofisticados programas para ayudar a encontrar soluciones numéricas (Metropolis - Hastings,
Filtros de Kalman y resolución de sistemas con expectativas).
Por otra parte, los Vectores Autoregresivos fueron introducidos por Sims [11], han sido de
gran utilidad para el modelaje de variables económicas, además, son considerados atractivos puntos de partida para la modelización económetrica. Por su parte Litterman [8] propuso el modelo
VAR bayesiano con el objetivo de ofrecer una solución al problema de la sobreparametrización
de los VAR reducidos. Además de Litterman, se han desarrollado otras investigaciones sobre
1
los VAR bayesianos dentro de los cuales se puede destacar, Doan, Litterman y Sims [5], con un
modelo BVAR con coeficientes variables en el tiempo, Ballabriga, Alvárez y Jareño [1], con un
modelo BVAR para la economı́a española y para Venezuela una referencia actual es el trabajo
de Bolı́var [2], [3] sobre predicciones de variables macroeconómicas mediante VAR bayesianos:
una aplicación al caso venezolano.
El objetivo de este trabajo de grado, es estudiar e implementar en el computador el método
del Negro y Schorfheide [4], para construir las densidades a priori de los predictores. Para ello, se
plantea un método para construir densidades a priori de un proceso autoregresivo multivariado
(VAR), a partir de las densidades a priori de los MEEG. Las densidades a priori construidas con
este método, permiten calcular la densidad a posteriori conjunta de los parámetros del VAR y
los parámetros del modelo macroeconómico.
El trabajo de grado tiene la siguiente estructura: en el capı́tulo uno se presenta los Vectores
Autoregresivos (VAR) y sus diferentes tipos de representaciones, además, se explican los Vectores Autoregresivos Bayesianos (BVAR), la función de verosimilitud y se presenta el modelo
estocástico de equilibrio general (MEEG), especı́ficamente se muestra el sistema de ecuaciones
el cual está determinado por las variables: producción, inflación y tasas de interés.
En el capı́tulo dos se presenta el BVAR de Del Negro y Schorfheide, la densidad a priori,
densidad a posteriori, el algoritmo de estimación y el cálculo de los momentos poblacionales.
En el último capı́tulo se encuentra la implementación en el programa Matlab de los modelos
VAR y BVAR tanto para la data de EEUU, como para la data de Venezuela. Finalmente,
se efectúa la comparación de los modelos en base a su desempeño predictivo, tomando como
medida el error medio cuadrático (emc).
2
Capı́tulo 1
Vectores Autoregresivos (VAR)
En este capı́tulo se presentará las definiciones y notaciones que serán utilizadas en los capı́tulos siguientes, para ello seguimos la exposición de Lutkepohl [9].
1.1.
Representación reducida
Los Vectores Autoregresivos son una generalización de un AR(p) para el caso multivariado.
Un proceso es un VAR de orden p si,
yt = ν + φ1 yt−1 + · · · + φp yt−p + ut
t = 0, ±1, ±2, ...
con,
yt = (yt1 , ..., ytK )0 es una v.a. de dimensión (K × 1).
φi es una matriz de dimensión (K × K).
ν = (ν1 , ..., νK )0 es un vector constante de dimensión (K × 1).
0
ut = (u1t , ..., uK
t ) es un vector aleatorio de dimensión (K × 1).
p es el número de retardos.
ut es llamado ruido blanco, donde,
E(ut ) = 0
y
Σ
u
0
E[ut us ] =
0
si s = t
si s 6= t
3
(1.1)
La matriz de covarianza Σu es asumida como no singular.
En la representación reducida cada variable a tiempo t se escribe como combinación lineal de
sus retardos y los retardos de las demás variables, no se contemplan los efectos contemporáneos
de las variables.
1.2.
Representación estructural
La representación estructural de un VAR de orden p está dada por,
B0 yt = α + B1 yt−1 + B2 yt−2 + · · · + Bp yt−p + ξt ,
(1.2)
donde,
B0 es una matriz invertible de dimensión (K × K) cuya diagonal es unitaria.
α es un vector constante de dimensión (K × 1).
Bi con i = 1, . . . , p es la matriz de coeficientes de dimensión (K × K).
ξt se le denominan los shocks estructurales.
ξt es un ruido blanco, tal que,
E(ξt ) = 0
y
Γ
E[ξt ξs0 ] =
0
si s = t
si s 6= t
donde Γ es una matriz diagonal positiva definida.
En el VAR estructural se estudia el efecto contemporáneo que ejercen las variables entre si.
1.3.
Representación en medias móviles
La representación de un VAR(p) está dada por:
Yt = ν + A1 Yt−1 + Ut .
4
(1.3)
la representación MA de Yt es:
Yt = µ +
∞
X
Ai Ut−i .
(1.4)
i=0
Yt es expresada en términos del pasado y el presente del error Ut y la media µ.
Ventajas y Desventajas de los VAR
En la siguiente tabla se presentarán algunas de las ventajas y desventajas de los VAR.
Ventajas
Desventajas
Los VAR reducidos son fáciles de estimar
Los Modelos estructurales son complejos
Buen desempeño predictivo
No son explicativos, en cuanto al
funcionamiento de una economı́a
Cualquier modelo económetrico de ecuaciones
El problema de la sobreparametrización y
simultáneas puede ser expresado
disponibilidad de los datos macroeconómicos
a través de un var reducido
El nombre de Vector Autoregresivo, resulta natural cuando se observa que relaciona un
vector de variables con su propio pasado. Es importante destacar que los modelos VAR, son
considerados atractivos puntos de partida para la modelización econométrica [1]. Por otra parte
los VAR reducidos permiten realizar predicciones y los VAR estructurales permiten estudiar las
relaciones estructurales.
1.4.
Vectores Autoregresivos Bayesianos (BVAR)
El modelo VAR bayesiano fue propuesto por Litterman [8], con el objetivo de ofrecer una
solución al problema del sobreajuste de los VAR reducidos. Se pretende evitar la influencia de la
variabilidad aleatoria en la estimación, sin tener que confrontar la disyuntiva de incluir o excluir
retardos de las distintas variables, de forma que el modelo resultante mantenga la generalidad
de la representación autoregresiva.
5
1.4.1.
Estimación Bayesiana
Sea Ψ el vector de parámetros a estimar de un modelo. En la estadı́stica bayesiana Ψ es una
v.a. con una densidad a priori p(Ψ) y el objetivo es estimar la densidad a posteriori p(Ψ|Y ), es
decir, la densidad de Ψ dada la muestra.
Para ello se hace uso de la fórmula de Bayes,
p(Ψ|Y ) =
p(Y |Ψ)p(Ψ)
,
p(Y )
p(Ψ) la densidad a priori de los parámetros.
p(Y |Ψ) la función de verosimilitud.
p(Y ) la densidad conjunta de la muestra.
p(Ψ|Y ) la densidad a posteriori de los parámetros.
Como p(Y ) es una constante, se puede escribir de la siguiente forma,
p(Ψ|Y ) ∝ p(Y |Ψ)p(Ψ),
en este caso,
Ψ = (φi , i = 1, ..., p, Σu ).
La inferencia bayesiana se basa en el uso de una distribución de probabilidad para describir
todas las cantidades desconocidas relevantes a un problema de estimación. Cabe señalar que en
la estadı́stica clásica Ψ es una constante desconocida.
El enfoque bayesiano permite expresar de forma más realista la información que se dispone,
mediante la asignación de distribuciones de probabilidad a los distintos coeficientes del modelo.
Litterman [8], propuso complementar la representación autoregresiva con la especificación
de una distribución a priori sobre los coeficientes. El modelo resultante de esta combinación se
denomina Vectores Autoregresivos Bayesianos (BVAR).
1.4.2.
Función de Verosimilitud
Para la función de verosimilitud se asume que las innovaciones ut en la representación autoregresiva del modelo yt = φ0 + φ1 yt−1 + · · · + φp yt−p + ut tienen una distribución Normal
6
multivariada N (0, Σu ) condicional al pasado de las observaciones de yt , con yt un vector de
dimensión n × 1.
Sea Y una matriz de dimensión T × n es
y1
1
1
y2
Y =
..
.
yT1
decir,
y12
...
y22
...
. . . .. .
.
n
. . . yT
..
.
yT2
y1n
y2n
0
0
Sea k = 1 + np y X una matriz de dimensión T × k con filas x0t = [1, yt−1
, . . . , yt−p
], es decir,
n
yt−p
1
yt−1
...
1
..
..
..
...
X= .
.
.
n
1
. . . yt−p
1 yt−1
U es una matriz de dimensión T × n y φ
u1
1
1
u2
U =
..
.
u1T
T ×(1+np)
es de dimensión (1 + np) × n, es decir,
2
n
u1 . . . u 1
u22 . . . un2
.. . .
.. ,
.
.
.
2
n
uT . . . uT
φ10
φ20
...
φ=
φ11
φ21
..
.
..
.
...
. .
..
. ..
n
. . . φp
φ1p φ2p
φn0
φn1
El VAR puede ser expresado como Y = Xφ + U con la función de verosimilitud,
1
1
−T /2
−1
0
0 0
0
0 0
p(Y |φ, Σu ) =
|Σu |
exp − tr[Σu (Y Y − φ X Y − Y Xφ + φ X Xφ)] ,
(2π)nT /2
2
condicional a las observaciones y1−p , . . . , y0 .
7
(1.5)
1.5.
Modelo estocástico de equilibrio general (MEEG)
El modelo consiste en un hogar representativo, empresas competitivas y una autoridad monetaria que ajusta las tasas de interés nominal, en respuesta a las desviaciones de la inflación.
Los hogares maximizan su función de utilidad,
"
Et
∞
X
s=t
β
s−t
(Cs /As )1−τ − 1
Ms
+ χlog
− hs
1−τ
Ps
#
,
(1.6)
donde Et denota el operador de expectativas, β es el factor de descuento, τ es el parámetro de
aversión al riesgo, Cs es el consumo a tiempo s, As factor de productividad a tiempo s, χ es el
factor de escala, h son las horas trabajadas y Ps es el nivel de precios nominal.
Además, la tasa de inflación se define como,
πt =
Pt
.
Pt−1
(1.7)
La restricción presupuestaria de los hogares, está dado por,
Ct +
Bt Mt Tt
Mt−1
Bt−1
+
+
= Wt ht +
+ Rt−1
+ Dt ,
Pt
Pt
Pt
Pt
Pt
(1.8)
donde Ct es el consumo a tiempo t, Bt /Pt son los bonos a tiempo t, Mt /Pt son los balances
reales a tiempo t, Tt /Pt es el impuesto a tiempo t, Wt es el salario a tiempo t, ht son las horas
trabajadas a tiempo t, Rt−1 son las tasas de interés a tiempo t − 1 y Dt son los beneficios de las
empresas a tiempo t.
La función de producción está dada por,
Xt (j) = At ht (j),
(1.9)
donde el factor de productividad At es exógeno, además, es un proceso autoregresivo en logaritmos
de raı́z unitaria
lnAt = lnγ + lnAt−1 + zet ,
8
(1.10)
donde zet es un AR(1),
zet = ρz zet−1 + z,t ,
(1.11)
y z,t puede interpretarse como el shock a la tecnologı́a.
El banco central, sigue una tasa de interés nominal para ajustar sus instrumentos en
respuestas a las desviaciones de la inflación y producción de sus respectivos niveles, es decir,
Rt
=
R∗
Rt−1
R∗
ρR "
πt ψ1
π∗
Xt
Xt∗
ψ2 #(1−ρR )
eR,t ,
(1.12)
donde R∗ tasa de interés nominal, Xt es la producción potencial, Xt∗ = At y R,t es el shock a
las tasas de interés. El parámetro 0 ≤ ρR < 1 determina el grado de las tasas de interés.
El gobierno consume una fracción ζt de cada bien j. Se define gt =
que get = ln gg∗t es un proceso AR(1) estacionario,
get = ρg get−1 + g,t ,
1
(1−ζt )
y se asume
(1.13)
donde g,t es el shock de los gastos del gobierno.
Presupuesto del gobierno
ζt Xt + Rt−1
Tt Mt Bt
Bt−1 Mt−1
+
=
+
+ ,
Pt
Pt
Pt
Pt
Pt
(1.14)
donde Xt es la producción, Rt−1 es las tasas de interés a tiempo t − 1, Bt−1 /Pt son los bonos a
tiempo t − 1, Mt−1 /Pt son los balances reales a tiempo t − 1 y Tt /Pt es el impuesto a tiempo t.
El sistema se reduce a tres ecuaciones, producción, inflación y tasas de interés nominal:
1
et − E[e
x
et = E[e
xt+1 ] − τ −1 (R
πt+1 ]) + (1 − ρg )e
gt + ρz zet ,
τ
γ
π
et = ∗ E[e
πt+1 ] + κ[e
xt − get ],
r
et = ρR R
et−1 + (1 − ρR )(ψ1 π
R
et + ψ2 x
et ) + R,t ,
9
(1.15)
(1.16)
(1.17)
et tasas de interés, get gastos del gobierno, zet es el
donde x
et es la producción, π
et es la inflación, R
shock a la tecnologı́a, r∗ =
γ
β
es el estado estacionario de las tasas de interés reales, τ factor de
aversión, κ es una función de ajuste de los precios y elasticidad de la demanda y ρR determina
el grado de las tasas de interés.
El sistema de expectativas racionales está dado por las ecuaciones (1.11), (1.13), (1.15)
- (1.17) y son resueltas por el algoritmo de Sims [12] (ver apéndice A).
Las relaciones entre las desviaciones del espacio de estado, el crecimiento de la producción,
inflación y tasas de interés están dadas por las siguientes ecuaciones de medida:
∆lnXt = lnγ + ∆xet + zet ,
(1.18)
∆lnPt = lnπ ∗ + π
et ,
et ].
lnRta = 4[(lnr∗ + lnπ ∗ ) + R
Por otra parte, el MEEG tiene tres shocks estructurales 0t = [R,t , g,t , z,t ]. Se supone que
los shocks son normales independientes, idénticamente distribuidos.
El vector de los parámetros del modelos está definido de la siguiente forma,
θ0 = [lnγ, lnπ ∗ , lnr∗ , κ, τ, ψ1 , ψ2 , ρR , ρg , ρz , σR , σg , σz ].
10
Capı́tulo 2
BVAR de Del Negro y Schorfheide
En este capı́tulo se estudia el método de Del Negro y Schorfheide [4], para ello se muestra
la densidad a priori, la densidad a posteriori y el algoritmo de estimación.
2.1.
Densidad a Priori
Sea Y la muestra observada, T el número de observaciones y X la matriz de rezagos de Y. La
muestra observada es aumentada con observaciones sintéticas T ∗ = λT , (Y ∗ , X ∗ ) (para λ fijo),
generadas del MEEG, (cuyo vector de parámetro es θ). La función de verosimilitud combina la
data observada y la sintética, obtenida de ( 1.5) y ( 2.1),
1
1
−T /2
−1
∗0 ∗
∗
0 ∗0 ∗
∗0 ∗
0 ∗0 ∗
|Σu |
exp − tr[Σu (Y Y − φ X Y − Y X φ + φ X X φ)] .
p(Y (θ)|φ, Σu ) =
(2π)nT /2
2
(2.1)
Factorizando obtenemos,
p(Y ∗ (θ), Y |φ, Σu ) = p(Y ∗ (θ)|φ, Σu )p(Y |φ, Σu ),
el término p(Y ∗ (θ)|φ, Σu ) puede ser interpretado como una densidad a priori de (φ, Σu ). La
información acerca de los parámetros del VAR está contenida en la data simulada a partir del
MEEG.
11
En la expresión ( 2.1) si se sustituyen los momentos muestrales por los momentos poblacionales (λT Γ∗yy (θ), λT Γ∗yx (θ) y λT Γ∗xx (θ)) se tiene la siguiente definición,
−1
− λT +n+1
2
p(φ, Σu |θ) , c |Σu |
1
−1
∗
0 ∗
∗
0 ∗
exp − tr[λT Σu (Γyy (θ) − φ Γxy (θ) − Γyx (θ)φ + φ Γxx (θ)φ)]
2
(2.2)
con c(θ) el factor de normalización, es decir,
c(θ) = (2π)
nk
2
λT −k
n
|λT Γ∗xx (θ)|− 2 |λT Σ∗u (θ)|− 2
×2
n(λT −k)
2
π
n(n−1)
4
n
Y
Γ[(λT − k + 1 − i)/2]
i=1
En 2.2 tenemos una densidad a priori de φ y Σu condicionada por los parámetros del MEEG.
La densidad a priori condicionada puede ser expresada como producto de densidades conjugadas naturales, lo cual simplifica su cómputo.
Si definimos,
∗
φ∗ (θ) = Γ∗−1
xx (θ)Γxy (θ),
(2.3)
∗
Σ∗u = Γ∗yy (θ) − Γ∗yx (θ)Γ∗−1
xx (θ)Γxy (θ)
(2.4)
Σu |θ ∼ Inv − W ishart(λT Σ∗u (θ), λT − k, n),
(2.5)
φ|Σu , θ ∼ N (φ∗ (θ), Σu ⊗ (λT Γ∗xx (θ))−1 ),
(2.6)
Σu , φ|θ ∼ Inv − W ishart − N .
(2.7)
entonces,
Por Zellner [13], p(Σu , φ|θ) tiene una distribución Inversa Wishart-Normal.
La densidad conjunta de los parámetros del VAR y los parámetros del MEEG se obtiene como,
p(φ, Σu , θ) = p(φ, Σu |θ)p(θ)
(2.8)
Por otra parte, como φ∗ (θ) ( 2.3) es el estimador de mı́nimos cuadrados ordinarios (mco) (en
el caso de una regresión lineal el estimador de máxima verosimilitud (emv) es igual al estimador
de mco) φ∗ (θ) minimiza el emc a un paso.
12
2.2.
Densidad a Posteriori
p(φ, Σu , θ|Y ) = p(φ, Σu |Y, θ)p(θ|Y ),
(2.9)
p(φ, Σu , θ|Y ) es la densidad posterior de todos los parámetros.
p(φ, Σu |Y, θ) es la densidad posterior de los parámetros del VAR dado los parámetros del
MEEG.
p(θ|Y ) es la densidad a posteriori de los parámetros del MEEG, es generada por Metropolis
- Hasting y empleando el Algoritmo de Sims [12] .
Además,
p(φ, Σu |Y, θ) = p(Σu |Y, θ)p(φ|Y, θ, Σu ).
Como la densidad a priori tiene una distribución Inversa W ishart - N ormal y la función
de verosimilitud tiene una distribución N ormal, se tiene que son conjugados naturales, Zellner
[13], muestra que la “densidad a posterior” de φ y Σu es Inversa Wishart-Normal, es decir,
Σu |Y, θ ∼ Inv − W ishart((λ + 1)T Σ̃u (θ), (1 + λ)T − k, n),
φ|Y, Σu , θ ∼ N (φ̃, Σu ⊗ (λT Γ∗xx (θ) + X 0 X)−1 ),
donde φ̃(θ) y Σ̃u (θ) son los estimadores de MV de φ y Σu , es decir,
φ̃(θ) = (λT Γ∗xx (θ) + X 0 X)−1 (λT Γ∗xy (θ) + X 0 Y ),
Σ̃u (θ) =
1
[(λT Γ∗yy (θ)
(λ+1)T
+ Y 0 Y ) − (λT Γ∗yx (θ) + Y 0 X)(λT Γ∗xx (θ) + X 0 X)−1 (λT Γ∗xy (θ) + X 0 Y )].
Por otra parte se demostrará dos proposiciones relacionadas con la densidad a posteriori y la
verosimilitud.
Proposición 1. La densidad posterior conjunta de los parámetros del VAR y el MEEG puede
ser escrita como,
p(φ, Σu , θ|Y ) = p(φ, Σu |Y )p(θ|φ, Σu ).
13
Demostración
p(φ, Σu , θ|Y ) = p(φΣu |Y )p(θ|φΣu Y ),
Luego,
p(φ, Σu , θ|Y ) =
p(φΣu Y ) p(θφΣu ) p(θφΣu Y ) p(φΣu Y )
,
p(Y ) p(φΣu ) p(θφΣu Y ) p(φΣu Y )
Asociando,
p(φ, Σu , θ|Y ) =
p(θφΣu Y ) p(θφΣu ) p(φΣu Y ) p(φΣu Y )
,
p(φΣu Y ) p(θφΣu Y ) p(φΣu )
p(Y )
Luego por definición de probabilidad condicional tenemos,
p(φ, Σu , θ|Y ) =
p(θ|φΣu Y )
p(Y |φΣu ) p(φΣu |Y ),
p(Y |θφΣu )
Como,
p(Y |θφΣu ) = p(Y |φΣu ),
(2.10)
Lo anterior puede ser interpretado como, la verosimilitud de los parámetros del VAR es igual
a la verosimilitud de los parámetros de VAR con el parámetro del MEEG.
Finalmente,
p(φ, Σu , θ|Y ) = p(θ|φΣu Y ) p(φΣu |Y ).
Proposición 2.
La función de verosimilitud puede ser escrita como,
Z
p(Y |θ) = p(Y |φ, Σu ) p(φ, Σu |θ) d(φ, Σu ).
Demostración
Z
Z
p(Y |φ, Σu ) p(φ, Σu |θ) d(φ, Σu ) =
14
p(Y |φ, Σu θ) p(φ, Σu |θ) d(φ, Σu ),
Por ( 2.10),
Z
Z
p(Y |φ, Σu ) p(φ, Σu |θ) d(φ, Σu ) =
p(Y φ, Σu |θ) d(φ, Σu ),
En consecuencia,
Z
p(Y |φ, Σu ) p(φ, Σu |θ) d(φ, Σu ) = p(Y |θ).
Proposición 3. La función de verosimilitud está dada por la siguiente expresión,
p(Y |θ) =
p(Y |φ, Σ)p(φ, Σ|θ)
.
p(φ, Σ|Y )
(2.11)
Demostración
Las hipótesis están dadas por las siguientes expresiones:
p(Y |φΣθ) = p(Y |φΣ),
(2.12)
p(θ|Y ) = p(θ|Y φΣ),
(2.13)
Considerando el posterior de los tres parámetros, tenemos,
p(θφΣ|Y ) = p(θ|φΣY )p(φΣ|Y ),
Por ( 2.13),
p(θφΣ|Y ) = p(θ|Y )p(φΣ|Y ),
Por lo tanto,
p(φΣ|Y ) =
p(θφΣ|Y )
,
p(θ|Y )
Luego, por ( 2.12),
p(Y |φ, Σ)p(φ, Σ|θ)
p(Y |φ, Σθ)p(φ, Σ|θ)
=
,
p(φ, Σ|Y )
p(φ, Σ|Y )
Sustituyendo ( 2.14) en la expresión anterior,
p(Y |φ, Σ)p(φ, Σ|θ)p(θ|y)
,
p(θφ, Σ|Y )
15
(2.14)
Luego,
p(Y )p(φΣ|θ)p(θ|y)
,
p(θΣφ)
Finalmente,
p(Y )p(φΣθ)p(θY )
= p(Y |θ).
p(φΣθ)p(θ)p(Y )
2.3.
Algoritmo de Metropolis Hasting
Dada la función de densidad f , la densidad objetivo, el algoritmo de Metropolis - Hasting
construye un conjunto de simulaciones de f . Este algoritmo es especialmente útil cuando se
puede evaluar la densidad (salvo por una constante multiplicativa), pero no se puede calcular
de manera explı́cita los momentos de la densidad. Es un algoritmo de simulación del tipo MCMC
(Monte Carlo Markov Chain), denominados ası́, porque esta familia de algoritmos generan una
cadena de Markov ergódica, cuya distribución lı́mite es f , es decir, en la t-ésima iteración el
algoritmo genera un valor aleatorio νt tal que, para t suficientemente grande, su densidad se
puede aproximar por f , es decir, el lı́mt→∞ νt = ν con ν una v.a. cuya densidad es f .
La referencia al algoritmo de Metropolis - Hasting corresponde a un término general que
se utiliza para una familia de métodos de simulación de cadenas de Markov que se derivan del
algoritmo propuesto por [10]. El algoritmo consiste en los siguientes pasos:
Algoritmo de Metropolis- Hasting
1. Generar un iterado inicial θ0
2. Desde t = 1 hasta n,
a. Generar θt∗ a partir de una distribución de salto
3. Asignar
θt+1
θ∗ con probabilidad ρ(θ , θ∗ )
t t
t
=
θ con probabilidad 1 − ρ(θ , θ∗ )
t
t t
con,
ρ(θt , θt∗ ) = min
16
n
p(θt∗ )
,1
p(θt )
o
ρ se denomina la probabilidad de aceptación de Metropolis - Hasting.
La regla de aceptación y rechazo del algoritmo anterior se puede interpretar de la siguiente
forma, si el salto produce un valor para el que se aumenta la densidad posterior, hacer θt+1 = θt∗ ,
si el salto no aumenta la densidad a posteriori, con cierta probabilidad se acepta o se rechaza.
2.4.
El algoritmo combinado de Metropolis - Hasting y
Sims
Se quiere simular la densidad a posteriori p(θ|Y ) de los parámetros del modelo. Las simulaciones se obtendrán mediante el Algoritmo de Metropolis - Hastings considerando la función
objetivo p(Y |θ)p(θ) como función de θ, que es calculable salvo por una constante multiplicativa.
El cálculo de la función de verosimilitud se efectuará empleando la ecuación ( 2.15), la cual
para poder ser determinada se necesitan los momentos muestrales y poblaciones de la data. En
particular los momentos poblacionales son obtenidos mediante la representación de espacios de
estado ( 2.16) y ( 2.17) (ver Algoritmo de estimación).
El algoritmo combinado está dado por los siguientes pasos.
Algoritmo de Estimación
1. Generar un iterado inicial θ0
2. Desde t = 1 hasta n,
a. Generar θt∗ = θt−1 + N (0, Σ)
b. Calcular la representación en espacios de estados con el Algoritmo de Sims
c. Calcular p(Y |θt ) por medio de la ecuación (2.15)
d. Asignar
θ∗ con probabilidad ρ(θ , θ∗ )
t t
t
θt+1 =
θ con probabilidad 1 − ρ(θ , θ∗ )
t
t t
con,
ρ(θt , θt∗ ) = min
n
p(θt∗ )
,1
p(θt )
o
17
2.5.
Algoritmo de estimación
Se asume que el espacio de parámetros de λ es finito, es decir, Λ = {l1 , . . . , lq }. λ se estima y
se genera la distribución a posteriori conjunta de los parámetros del MEEG y del VAR usando
el siguiente algoritmo:
1. Para λ ∈ Λ se usa el algoritmo de Metrópolis Hasting, para generar las simulaciones de
pλ (θ|Y ) ∝ pλ (Y |θ)p(θ). Los pasos necesarios para evaluar pλ (θ|Y ) se basan en la siguiente
ecuación:
p(Y |θ) =
p(Y |φ, Σ)p(φ, Σ|θ)
p(φ, Σ|Y )
(2.15)
n
|λT Γ∗xx (θ) + X 0 X|− 2 |(λ + 1)T Σu (θ)|−
=
n
|λT Γ∗xx (θ)|− 2 |λT Σu (θ)|−
×
(2π)−
nT
2
2
n((λ+1)T −k)
2
2
n(λT −k)
2
Qn
i=1
(λ+1)T −k
2
λT −k
2
Γ[((λ + 1)T − k + 1 − i)/2]
Qn
.
i=1 Γ[(λT − k + 1 − i)/2]
Para cada θ:
a) Se resuelve el MEEG dado por las ecuaciones (1.11), (1.13), (1.15) - (1.17), con
el algoritmo que describe Sims [12]. Esto conduce a una ecuación de transición de la
forma,
st = T (θ)st−1 + R(θ)t .
(2.16)
Las ecuaciones (1.18) pueden escribirse en forma apilada como:
yt = Z(θ)st + D(θ) + νt .
(2.17)
En la implementación se elegirá st tal que νt = 0. Se define la matriz de covarianza
de los shocks como:
E[νt νt0 ] = 0,
E[t 0t ] = Σ (θ),
18
E[t νt0 ] = Σν (θ).
b) Se calculan los momentos poblacionales Γ∗yy (θ), Γ∗yx (θ) y Γ∗xx (θ) desde la representación
de estados de (2.16) y (2.17). Note que,
E[yt yt0 ] = ZΩss Z 0 + ZRΣν + (ZRΣν )−1 + Σνν + DD0 ,
0
] = ZT h (Ωss Z 0 + RΣν ) + DD0 .
E[yt yt−h
donde Ωss = E[st s0t ] el cual puede ser obtenido por la ecuación de Lyapunov
Ωss = T Ωss T 0 + RΣ R0 .
2. Basado en las simulaciones se modifica el estimador de la media armónica para obtener
las aproximaciones numéricas de la data pλ (Y ), de acuerdo con Geweke [7].
2.6.
Cálculo de los momentos poblacionales
Como se señaló en la sección anterior se calcularán los momentos poblacionales a partir de
la representación de estados de (2.16) y (2.17). Las dimensiones st , T , R, yt , Zt , D y νt están
dadas por,
dim(yt ) = n × 1
dim(st ) = h × 1
dim(νt ) = n × 1
dim(R) = n × l
dim(Z) = n × h
dim(D) = n × 1
dim(T ) = h × h
dim(t ) = l × 1
Es importante señalar que st es un proceso autoregresivo (AR) con media cero; t y νt son
dos ruidos blancos. En la definición usual de representación de espacios de estados se supone
que t y νt no están correlacionados.
Se supondrá, siguiendo a Del Negro y Schorfheide [4] que,
Σ
t1 = t2
ν
E[νt1 t1 ] =
0
si t 6= t .
1
2
Se denota la matriz de covarianza de los shocks y sus correlaciones mediante,
Σνν (θ) = E[νt νt0 ],
Σ (θ) = E[t 0t ],
Σν (θ) = E[t νt0 ].
(2.18)
En el modelo considerado en este trabajo (como en gran parte de los modelos estudiados en
el área), νt y D(θ) son nulos. Daremos las demostraciones para el caso general, es decir, donde
19
νt y D(θ) no necesariamente son nulos.
Se denota la covarianza de st mediante Ωss , es decir, Ωss = E[st s0t ] .
En las siguientes proposiciones, (siguiendo a Del Negro y Schorfheide [4]) se presentan identidades para el cálculo de los momentos poblacionales.
Proposición 3. Ωss satisface la siguiente ecuación de Lyapunov,
Ωss = T Ωss T 0 + RΣ R0 .
Demostración
De (2.16) se tiene que st = T (θ)st−1 +R(θ)t ; vamos a calcular la siguiente función de covarianza,
E[st s0t ] = E[(T st−1 + Rt )(T st−1 + Rt )0 ].
Por propiedad de matrices transpuestas,
E[st s0t ] = E[(T st−1 + Rt )(s0t−1 T 0 + 0t R0 )].
Aplicando propiedad distributiva obtenemos,
E[st s0t ] = E[T st−1 s0t−1 T 0 + T st−1 0t R0 + Rt s0t−1 T 0 + Rt 0t R0 ].
Por la linealidad de la esperanza,
E[st s0t ] = T E[st−1 s0t−1 ]T 0 + T E[st−1 0t ]R0 + RE[t s0t−1 ]T 0 + RE[t 0t ]R0 .
h
Como st−1 = T st−h−1 +
h−1
X
T j−1 Rt−j y t no está correlacionado con los t−j , entonces, st−1 y
j=1
t no están correlacionados, luego,
E[st s0t ] = T E[st−1 s0t−1 ]T 0 + RE[t 0t ]R0 .
Luego, Ωss = E(st s0t ) y Σ (θ) = E[t 0t ], entonces,
Ωss = T Ωss T 0 + RΣ R0
(2.19)
20
Proposición 4. E[yt yt0 ] = ZΩss Z 0 + ZRΣν + (ZRΣν )0 + Σνν + DD0 .
Demostración
Vamos a calcular la siguiente función de covarianza,
E[yt yt0 ] = E[(Zst + D + νt )(Zst + D + νt )0 ].
Por propiedad de matrices transpuestas,
E[yt yt0 ] = E[(Zst + D + νt )(s0t Z 0 + D0 + νt0 )].
Aplicando propiedad distributiva obtenemos,
E[yt yt0 ] = E[Zst s0t Z 0 + Zst D0 + Zst νt0 + Ds0t Z 0 + DD0 + Dνt0 + νt s0t Z 0 + νt D0 + νt νt0 ].
Por propiedad de esperanza, la esperanza de la suma, es la suma de las esperanzas, entonces,
E[yt yt0 ] = ZE(st s0t )Z 0 + E(Zst D0 ) + E(Zst νt0 ) + E(Ds0t Z 0 ) + E(DD0 ) + E(Dνt0 ) + E(νt s0t Z 0 )
+E(νt D0 ) + E(νt νt0 ).
Luego, Ωss = E(st s0t ), st es un proceso autoregresivo (AR) con media cero y νt = 0,
E[yt yt0 ] = ZΩss Z 0 + E(Zst νt0 ) + E(νt s0t Z 0 ) + E(νt νt0 ) + E(DD0 ).
Sustituyendo (2.16) y teniendo en cuenta que la E(DD0 ) = DD0 y por (2.18) Σνν (θ) = E[νt νt0 ],
entonces,
E[yt yt0 ] = ZΩss Z 0 + E[Z(T st−1 + Rt )νt0 ] + E[νt (T st−1 + Rt )0 Z 0 ] + Σνν + DD0 .
Aplicando propiedad distributiva obtenemos,
E[yt yt0 ] = ZΩss Z 0 + E[ZT st−1 νt0 + ZRt νt0 ] + E[νt (s0t−1 T 0 + 0t R0 )Z 0 ] + Σνν + DD0 .
La esperanza de la suma, es la suma de las esperanzas, tenemos
E[yt yt0 ] = ZΩss Z 0 + E[ZT st−1 νt0 ] + E[ZRt νt0 ] + E[νt s0t−1 T 0 Z 0 ] + E[νt 0t R0 Z 0 ] + Σνν + DD0 ,
st es un proceso autoregresivo (AR) con media cero y sabiendo que E[νt−h st−i ] = 0 con h, i =
1, 2, . . . y h 6= i, tenemos,
E[yt yt0 ] = ZΩss Z 0 + ZRE[t νt0 ] + E[νt 0t ]R0 Z 0 + Σνν + DD0 .
21
Por (2.18) Σν (θ) = E[t νt0 ], luego,
E[yt yt0 ] = ZΩss Z 0 + ZRΣν + Σ0ν R0 Z 0 + Σνν + DD0 .
Finalmente, por propiedad de matrices transpuestas, tenemos,
E[yt yt0 ] = ZΩss Z 0 + ZRΣν + (ZRΣν )0 + Σνν + DD0
(2.20)
En el caso de la definición de una representación de espacios de estados ordinaria (con y
ν no correlacionados), las expresiones anteriores Σν = 0, en consecuencia ZRΣν = 0.
Como, νt = 0 y t y νt no están correlacionados, tendremos lo siguiente,
Γ∗yy (θ) = Eθ [yt yt0 ] = ZΩss Z 0 + DD0
0
] = ZT h (Ωss Z 0 + RΣν ) + DD0
Proposición 5. E[yt yt−h
Demostración
Iterando hacia atrás en (2.16),
st = T st−1 + Rt
= T (T st−2 + Rt−1 ) + Rt
= T 2 st−2 + T Rt−1 + Rt
= T 2 (T st−3 + Rt−2 ) + T Rt−1 + Rt
= T 3 st−3 + T 2 Rt−2 + T Rt−1 + Rt
..
.
h−1
X
h
= T st−h +
T j Rt−j
(2.21)
j=0
Además,
yt−h = Zst−h + D + νt−h ,
yt = Zst + D + νt .
22
(2.22)
Sustituyendo (2.21) en la ecuación (2.22), nos queda,
yt = Z
T h st−h +
h−1
X
!
T j Rt−j
+ D + νt .
j=0
Ahora bien,
"
0
E[yt yt−h
]=E
ZT h st−h + Z
h−1
X
#
!
T j Rt−j + D + νt (Zst−h + D + νt−h )0 .
j=0
Por propiedad de matrices transpuestas,
"
!
#
h−1
X
0
0
E[yt yt−h
]=E
ZT h st−h + Z
T j Rt−j + D + νt s0t−h Z 0 + D0 + νt−h
.
j=0
Aplicando propiedad distributiva y linealidad de la esperanza obtenemos,
0
E[yt yt−h
]
= ZT
h
E[st−h s0t−h ]Z 0
0
h
+ ZT E[st−h ]D + ZT
h
0
E[st−h νt−h
]
+Z
h−1
X
T j RE[t−j s0t−h ]Z 0
j=0
+Z
h−1
X
T j RE[t−j ]D0 + Z
j=0
h−1
X
0
0
T j RE[t−j νt−h
] + DE[s0t−h ]Z 0 + E[DD0 ] + DE[νt−h
]
j=0
0
].
+E[νt s0t−h ]Z 0 + E[νt ]D0 + E[νt νt−h
Por hipótesis st es un proceso centrado, t y νt son ruidos blancos, la E[DD0 ] = DD0 ,
E[st s0t ] = Ωss y como st−h = T st−h−1 + Rt−h , entonces, st−h y t−j no están correlacionados,
luego,
0
0
E[yt yt−h
] = ZT h Ωss Z 0 + ZT h E[st−h νt−h
] + DD0 .
Iterando hacia atrás st−h ,
0
0
E[yt yt−h
] = ZT h Ωss Z 0 + ZT h E[(T st−h−1 + t−h )νt−h
] + DD0 .
Aplicando propiedad distributiva y linealidad de la esperanza, resulta,
0
0
0
E[yt yt−h
] = ZT h Ωss Z 0 + ZT h [E(T st−h−1 νt−h
) + E(t−h νt−h
)] + DD0 .
23
Por (2.18) Σν = E[t νt ], además, como st−h−1 = T st−h−2 + t−h−1 , entonces, st−h−1 y νt−h no
están correlacionados, luego,
0
E[yt yt−h
] = ZT h Ωss Z 0 + ZT h Σν + DD0 .
Finalmente,
0
] = ZT h (Ωss Z 0 + RΣν ) + DD0
E[yt yt−h
(2.23)
y Ωss puede ser obtenido por la ecuación de Lyapunov Ωss = T Ωss T 0 + RΣ R0 (demostrada en
la proposición 1).
En la representación de espacios de estado usual, Σν = 0, entonces, RΣν = 0.
En este caso,
0
E[yt yt−h
] = ZT h Ωss Z 0 + DD0
0
].
Para determinar el momento poblacional Γ∗xx se debe definir las entradas de la matriz, E[yt yt−h
Vamos a definir yt y yt−h .
yt0 = (yt1 , . . . , ytn ),
0
yt−h
=
1
yt−h
,
2
yt−h
,...,
n
yt−h
,
(2.24)
Tenemos,
1
2
n
yt1 yt−h
yt1 yt−h
. . . yt1 yt−h
2 1
n
2
yt yt−h yt2 yt−h
. . . yt2 yt−h
0
E[yt yt−h ] = E
..
..
..
..
.
.
.
.
1
2
n
ytn yt−h
ytn yt−h
. . . ytn yt−h
.
Luego las entradas (i, j) de la matriz anterior está dada por,
j
0
Eθ [yt yt−h
](i, j) = E[yti yt−h
]
con i, j = 1, . . . , n
El momento poblacional Γ∗xx (θ) se denota ası́,
Γ∗xx (θ) = E[xt x0t ].
24
(2.25)
Veamos como son las entradas de la matriz Γ∗xx (θ). Para ellos se define xt ,
1
2
n
1
2
n
1
n
x0t = (1, yt−1
, yt−1
, . . . , yt−1
, . . . , yt−l
, yt−l
, . . . , yt−l
, . . . , yt−p
, . . . , yt−p
).
Luego,
E(xt x0t ) =
E
1
1
yt−1
2
yt−1
...
n
yt−1
...
1
yt−l
2
yt−l
...
n
yt−l
...
1
yt−p
...
1
yt−1
1 y1
yt−1
t−1
1 y2
yt−1
t−1
...
1 yn
yt−1
t−1
...
1 y1
yt−1
t−l
1 y2
yt−1
t−l
...
1 yn
yt−1
t−l
...
1 y1
yt−1
t−p
...
2
yt−1
..
.
2 y1
yt−1
t−1
..
.
2 y2
yt−1
t−1
..
.
...
2 yn
yt−1
t−1
..
.
...
2 y1
yt−1
t−l
..
.
2 y2
yt−1
t−l
..
.
...
2 yn
yt−1
t−l
..
.
...
2 y1
yt−1
t−p
..
.
...
n
yt−1
..
.
n y1
yt−1
t−1
..
.
n y2
yt−1
t−1
..
.
...
n yn
yt−1
t−1
..
.
...
n y1
yt−1
t−l
..
.
n y2
yt−1
t−l
..
.
...
n yn
yt−1
t−l
..
.
...
n y1
yt−1
t−p
..
.
...
1
yt−l
1 y1
yt−l
t−1
1 y2
yt−l
t−1
...
1 yn
yt−l
t−1
...
1 y1
yt−l
t−l
1 y2
yt−l
t−l
...
1 yn
yt−l
t−l
...
1 y1
yt−l
t−p
...
2
yt−l
2 y1
yt−l
t−1
2 y2
yt−l
t−1
...
2 yn
yt−l
t−1
...
2 y1
yt−l
t−l
2 y2
yt−l
t−l
...
2 yn
yt−l
t−l
...
2 y1
yt−l
t−p
...
..
.
..
.
..
.
..
.
..
.
n
yt−l
..
.
n y1
yt−l
t−1
..
.
n y2
yt−l
t−1
..
.
...
n yn
yt−l
t−1
..
.
...
n y1
yt−l
t−l
..
.
n y2
yt−l
t−l
..
.
...
n yn
yt−l
t−l
..
.
...
n y1
yt−l
t−p
..
.
...
1
yt−p
..
.
1
1
yt−p
yt−1
..
.
1
2
yt−p
yt−1
..
.
...
1
n
yt−p
yt−1
..
.
...
1
1
yt−p
yt−l
..
.
1
2
yt−p
yt−l
..
.
...
1
n
yt−p
yt−l
..
.
...
1
1
yt−p
yt−p
..
.
...
n
yt−p
n y1
yt−p
t−1
n y2
yt−p
t−1
...
n yn
yt−p
t−1
...
n y1
yt−p
t−l
n y2
yt−p
t−l
...
n yn
yt−p
t−l
...
n y1
yt−p
t−p
...
..
.
..
.
..
.
n
yt−p
1 yn
yt−1
t−p
2 yn
yt−1
t−p
..
.
n
n
yt−1 yt−p
..
.
1 yn
yt−l
t−p
.
2
n
yt−l yt−p
..
.
n
n
yt−l yt−p
..
.
1
n
yt−p
yt−p
..
.
n
n
yt−p yt−p
Se observa que la matriz E[xt x0t ] está compuesta en la primera columna por el vector xt y
en la primera fila por el vector x0t y las otras entradas de la matriz están dadas por la matriz
0
E[yt yt−h
] con h = 1, . . . , p (la covarianza es estacionaria).
Por otra parte, el momento poblacional Γ∗yx (θ) se denota ası́,
Γ∗yx (θ) = E[yt x0t ].
Veamos como son las entradas de la matriz Γ∗yx (θ).
yt0 = (yt1 , . . . , ytn ),
(2.26)
1
2
n
1
2
n
1
n
x0t = (1, yt−1
, yt−1
, . . . , yt−1
, . . . , yt−l
, yt−l
, . . . , yt−l
, . . . , yt−p
, . . . , yt−p
).
(2.27)
25
Ahora bien,
E(yt x0t ) =
yt1
1
yt1 yt−1
2
yt1 yt−1
n
yt1 yt−1
1
yt1 yt−l
2
yt1 yt−l
n
yt1 yt−l
1
yt1 yt−p
n
yt1 yt−p
...
...
...
...
...
2 2 1
n
2
n
2
1
n
2
yt yt yt−1 yt2 yt−1
. . . yt2 yt−p
. . . yt1 yt−p
. . . yt2 yt−l
yt2 yt−l
. . . yt2 yt−l
. . . yt2 yt−1
E
..
..
..
..
..
..
..
.
.
.
.
.
.
.
1
2
n
1
2
n
1
n
ytn ytn yt−1
ytn yt−1
. . . ytn yt−1
. . . ytn yt−l
ytn yt−l
. . . ytn yt−l
. . . ytn yt−p
. . . ytn yt−p
Se observa que la matriz E[yt x0t ], está compuesta en la primera fila por el vector x0t y en
0
la primera columna por el vector xt y las demás entradas están dadas por la matriz E[yt yt−h
]
con h = 1, . . . , p
Finalmente, el momento poblacional Γ∗xy (θ), lo denotaremos ası́,
Γ∗xy (θ) = E[xt yt0 ],
donde Γ∗xy (θ) = [Γ∗yx (θ)]0 .
2.7.
Medias Armónicas
Basado en las simulaciones aplicamos el método Geweke [7] (modificación de las Medias
Armónicas) para obtener las aproximaciones numéricas de la densidad de la data pλ (Y ). Para
el cálculo de la verosimilitud marginal usamos el método propuesto por Gelfand y Dey [6].
Teorema. El Método de Gelfand - Dey para el cálculo de la verosimilitud Marginal
Sean p(θ|Mi ), p(y|θ, Mi ) y p(θ|y, Mi ) la densidad a priori, la verosimilitud y la densidad
a posteriori respectivamente, para el modelo Mi definición en Θ. Si f es una función de densidad con soporte en Θ, entonces,
f (θ)
1
E
|y, Mi =
.
p(θ|Mi )p(y|θ, Mi )
p(y|Mi )
26
.
Este teorema es muy importante porque para cualquier función de densidad podemos establecer
f (θ)
g(θ) =
y usar las simulaciones de la densidad a posterior para estimar
p(θ|Mi )p(y|θ, Mi )
E[g(θ)|y, Mi ].
f (θ)
p(θ|Mi )p(y|θ, Mi )
debe ser finito para todo valor de θ. Este método requiere que se elija cuidadosamente f (θ).
La teorı́a asintótica subyacente del método de Gelfang-Dey[6] implica que
Geweke [7], recomienda la siguiente estrategia para la elección de f (θ). La estrategia consiste en que f (θ) sea una densidad Normal truncada (es decir, no tomamos en cuenta las colas).
El motivo que la densidad normal este truncada es difı́cil de comprobar porque la expresión
f (θ)
b los
es finita en la colas para la densidad normal. Formalmente, sea θb y Σ
p(θ|Mi )p(y|θ, Mi )
estimadores de E(θ|y, Mi ) y var(θ|y, Mi ) obtenidas de la simulación de la densidad a posterior.
Además, p ∈ (0, 1) y sea θb el soporte de f (θ), el cual es definido por,
b −1 (θb − θ) ≤ χ21−p (k)},
θb = {θ : (θb − θ)0 Σ
donde χ21−p (k) es el percentil (1-p) de la distribución Chi Cuadrado con k grados de libertad.
Geweke recomienda dejar f (θ) como una densidad Normal Multivariada truncada en la
región de θ, es decir,
1 b
1
−1/2
0 b −1 b
b
b
f (θ) =
|Σ|
exp − (θ − θ) Σ (θ − θ) I(θ ∈ θ),
p(2π)k/2
2
donde I() es la función indicadora.
27
Capı́tulo 3
Resultados Empı́ricos
En este capı́tulo se realiza la implementación de los modelos VAR y BVAR para la economı́a
de EEUU y la de Venezuela.
3.1.
Implementación de los modelos VAR y BVAR
En esta sección se presenta el planteamiento de los modelos para las siguientes variables:
producto (PIB), inflación y tasas de interés, se hará el estudio para los datos de la economı́a
de EEUU y de Venezuela. Se realizan predicciones y se compara el modelo BVAR del Negro y
Schorfheide [4] (en las secciones siguientes se denotará como BVAR Schorfheide) con un VAR
frecuentista y un BVAR con una densidad a priori de Minnesota [8]. Se emplea el emc para
determinar el desempeño predictivo de los modelos.
3.1.1.
Modelo
El modelo que se plantea es un VAR con tres variables (Producción, Inflación y Tasas de
Interés). Se estudiarán dos casos, la data de EEUU1 y la data de Venezuela2 .
1
2
Fuente: Frank Shorfheide http://www.econ.upenn.edu/ schorf/research.htm
Fuente: Banco Central de Venezuela
28
Variable
Notación
Producción
y
Inflación
p
Tasas de Interés
r
Las dos primeras variables mostradas en la tabla anterior se les aplica la primera diferencia
y el logaritmo y para las tasas se les aplica solamente el logaritmo.
3.1.2.
Data de EEUU
En la data de EEUU se dispone de observaciones trimestrales especı́ficamente desde el cuarto
trimestre de 1959, hasta el tercer trimestre del año 2001, el total de observaciones son 168. Los
modelos serán estimados tomando en consideración los datos hasta el año 1999 (trimestre tres)
y se realizarán las predicciones hasta el año 2001.
3.1.2.1.
Implementación del Modelo VAR reducido
En está sección se muestran los resultados de un VAR reducido para las variables mencionadas anteriormente.
Las ecuaciones que se estimarán tienen la siguiente forma:
yt = φ1,1 yt−1 + φ1,2 yt−2 + φ1,3 yt−3 + φ1,4 yt−4 + φ1,5 pt−1 + φ1,6 pt−2 + φ1,7 pt−3 + φ1,8 pt−4
+ φ1,9 rt−1 + φ1,10 rt−2 + φ1,11 rt−3 + φ1,12 rt−4 + c1t ,
pt = φ2,1 pt−1 + φ2,2 pt−2 + φ2,3 pt−3 + φ2,4 pt−4 + φ2,5 yt−1 + φ2,6 yt−2 + φ2,7 yt−3 + φ2,8 yt−4
+ φ2,9 rt−1 + φ2,10 rt−2 + φ2,11 rt−3 + φ2,12 rt−4 + c2t ,
rt = φ3,1 rt−1 + φ3,2 rt−2 + φ3,3 rt−3 + φ3,4 rt−4 + φ3,5 yt−1 + φ3,6 yt−2 + φ3,7 yt−3 + φ3,8 yt−4
+ φ3,9 pt−1 + φ3,10 pt−2 + φ3,11 pt−3 + φ3,12 pt−4 + c3t ,
donde c1, c2 y c3 son los componentes determinı́sticos para cada ecuación.
Veamos la estimación del modelo:
29
variable dependiente
Producto
R2
0.2845
N◦ de variables
13
N◦ de observaciones
156
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
0.166931
1.991643
0.048315
Producto
2
0.223533
2.604036
0.010186
Producto
3
-0.032296
-0.365696
0.715133
Producto
4
0.013707
0.169660
0.865517
Inflacion
1
-0.154003
-0.823580
0.411550
Inflacion
2
0.103370
0.520092
0.603804
Inflacion
3
0.004798
0.024553
0.980446
Inflacion
4
-0.047226
-0.247294
0.805035
Tasas
1
-0.160121
-2.688266
0.008035
Tasas
2
-0.027483
-0.405743
0.685538
Tasas
3
0.148895
2.226139
0.027569
Tasas
4
-0.019611
-0.323541
0.746758
Constante
-
1.025761
4.076965
0.000075
30
variable dependiente
Inflación
R2
0.7827
N◦ de variables
13
N◦ de observaciones
156
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
0.070544
1.7498
0.082294
Producto
2
-0.0091802
-0.22234
0.82437
Producto
3
0.048633
1.1449
0.25417
Producto
4
0.062166
1.5997
0.11187
Inflación
1
0.61972
6.8901
1.64E-06
Inflación
2
-0.026213
-0.27419
0.78433
Inflación
3
0.51968
5.5294
1.48E-03
Inflación
4
-0.10528
-1.1461
0.25367
Tasas
1
0.0086332
0.30134
0.7636
Tasas
2
0.0077493
0.23785
0.81234
Tasas
3
-0.074614
-2.3193
0.021798
Tasas
4
0.041632
1.428
0.15549
Constante
-
-0.036345
-0.30033
0.76436
31
3.1.2.2.
variable dependiente
Tasas de Interés
R2
0.8831
N◦ de variables
13
N◦ de observaciones
156
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
0.4885
3.837
0.00018629
Producto
2
0.30524
2.341
0.020613
Producto
3
0.14318
10.673
0.28761
Producto
4
-0.063415
-0.51676
0.60612
Inflación
1
0.76081
26.786
0.0082595
Inflación
2
-0.43048
-14.259
0.15607
Inflación
3
0.92135
31.043
0.0022995
Inflación
4
-0.4633
-15.972
0.11244
Tasas
1
0.58307
64.447
0.000016584
Tasas
2
0.16888
16.414
0.10292
Tasas
3
0.18118
17.834
0.076649
Tasas
4
-0.048209
-0.52362
0.60135
Constante
-
-0.82043
-21.468
0.033496
Implementación del Modelo BVAR Litterman
En esta sección se muestran los resultados del modelo BVAR de Litterman para las variables
mencionadas anteriormente . Los hiperparámetros con los cuales se realizó la estimación del
modelo son los siguientes:
θ = 0.1
0
θ1 = 1
θ = 0.5
2
En las siguientes tablas se presenta el ajuste realizado para cada ecuación del modelo.
32
variable dependiente
Producto
R2
0.2830
N◦ de variables
13
N◦ de observaciones
156
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
0.169287911
2.129352
0.034804751
Producto
2
0.207574264
2.563508
0.011313315
Producto
3
-0.033173196
-0.409332142
0.682861014
Producto
4
0.01758838
0.239145687
0.811308536
Inflación
1
-0.155738778
-0.910439121
0.364004619
Inflación
2
0.074559188
0.419950433
0.675103208
Inflación
3
0.027802637
0.169859963
0.865341765
Inflación
4
-0.040026245
-0.261198267
0.794286347
Tasas
1
-0.15352044
-2.796673
0.005817542
Tasas
2
-0.013485572
-0.227761
0.820132139
Tasas
3
0.112642601
2.0923470
0.03803724
Tasas
4
-0.005342191
-0.114467165
0.909015617
Constante
-
1.0441880
4.43349
1.74715E-05
33
variable dependiente
Inflación
R2
0.7813
N◦ de variables
13
N◦ de observaciones
156
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
0.073975641
1.9487060
0.053136431
Producto
2
-0.003000652
-0.0792358
0.936947285
Producto
3
0.03828155
1.0460220
0.297179291
Producto
4
0.044432858
1.3744540
0.171284668
Inflación
1
0.613342154
7.2521160
1.8327E-11
Inflación
2
-0.009420816
-0.1053719
0.916216927
Inflación
3
0.473322799
5.5068480
1.48505E-07
Inflación
4
-0.081123103
-0.9804275
0.328402956
Tasas
1
0.009548738
0.3619820
0.717858496
Tasas
2
0.005545492
0.1938269
0.846565219
Tasas
3
-0.050737258
-1.9490000
0.053100936
Tasas
4
0.01944537
0.8666415
0.387478026
Constante
-
-0.010798256
-0.0971437
0.922737748
34
3.1.2.3.
variable dependiente
Tasas
R2
0.8825
N◦ de variables
13
N◦ de observaciones
156
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
0.491911242
4.0880380
6.96485E-05
Producto
2
0.276999112
2.3099770
0.022208769
Producto
3
0.121195369
1.0379300
0.300918972
Producto
4
-0.03454904
-0.3364595
0.736979439
Inflación
1
0.693362923
2.6469060
0.008961934
Inflación
2
-0.323774458
-1.1938320
0.234367546
Inflación
3
0.718588143
2.8642950
0.004759064
Inflación
4
-0.302286151
-1.2870100
0.200009433
Tasas
1
0.591049614
6.9284780
1.07103E-10
Tasas
2
0.169353203
1.7685850
0.078930137
Tasas
3
0.180171717
1.9607170
0.051704494
Tasas
4
-0.059744121
-0.7435526
0.458272806
Constante
-
-0.775957626
-2.1902290
0.030001786
Implementación del Modelo BVAR Schorfheide
En está sección se muestran los resultados del BVAR Schorfheide. En las siguientes tablas
se presenta el ajuste realizado para cada ecuación del modelo.
35
variable dependiente
Producto
R2
0.20591
N◦ de variables
13
N◦ de observaciones
156
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
0.28439
3.2207
0.0015831
Producto
2
0.26701
2.9526
0.0036849
Producto
3
0.083175
0.89399
0.37283
Producto
4
0.099294
1.1666
0.24531
Inflación
1
-0.0067634
-0.034333
0.97266
Inflación
2
0.16704
0.79776
0.42633
Inflación
3
-0.16625
-0.80766
0.42063
Inflación
4
-0.022333
-0.11101
0.91177
Tasas
1
-0.18724
-2.984
0.0033472
Tasas
2
-0.026329
-0.36896
0.71271
Tasas
3
0.1695
2.4054
0.017431
Tasas
4
0.056211
0.88027
0.38019
Constante
-
0.10929
0.41234
0.68071
36
variable dependiente
Inflación
R2
0.70872
N◦ de variables
13
N◦ de observaciones
156
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
0.093263
1.9978
0.04763
Producto
2
-0.035997
-0.7529
0.45273
Producto
3
0.086346
1.7555
0.081318
Producto
4
0.053897
1.1978
0.23298
Inflación
1
0.19802
1.9014
0.059267
Inflación
2
0.44744
4.0421
8.62E-01
Inflación
3
0.1614
1.4831
0.14024
Inflación
4
0.060141
0.5654
0.57266
Tasas
1
0.073704
2.2218
0.027871
Tasas
2
-0.058485
-1.5503
0.12329
Tasas
3
-0.015989
-0.4292
0.66841
Tasas
4
0.014494
0.4293
0.66833
Constante
-
-0.12292
-0.8772
0.38184
37
variable dependiente
Tasas
R2
0.87065
N◦ de variables
13
N◦ de observaciones
156
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
0.46014
3.43640
0.00077212
Producto
2
0.043298
0.31573
0.75267
Producto
3
0.12222
0.86625
0.3878
Producto
4
0.1396
1.08150
0.28128
Inflación
1
0.12544
0.41991
0.67518
Inflación
2
0.040989
0.12909
0.89747
Inflación
3
0.66641
2.13480
0.034481
Inflación
4
-0.036702
-0.12030
0.90442
Tasas
1
0.65945
6.93010
1.33E-06
Tasas
2
0.11258
1.04040
0.29993
Tasas
3
0.11677
1.09280
0.27633
Tasas
4
-0.076063
-0.78549
0.43347
Constante
-
-0.19926
-0.49572
0.62085
Al comparar los coeficientes estimados mediante el BVAR de Litterman, BVAR Schorfheide con los coeficientes del VAR, se observa que son similares, además, los coeficientes de las
variables diferentes a la variable dependiente son cercanos a cero. Por otra parte, el coeficiente
de determinación R2 siempre es mayor en el modelo VAR.
3.1.2.4.
Desempeño predictivo de los modelos
En está sección se presenta la comparación del desempeño predictivo de los modelos VAR
frecuentista, BVAR de Del Negro y Schorfheide y el BVAR de Litterman, a diferentes horizontes
para el producto, inflación y tasas de interés, para el caso de la data de EEUU usando el error
38
medio cuadrático (emc). Por otra parte, es importante destacar cual es el valor de λ que se
emplea, para ello, veamos la siguiente tabla,
Modelos
λ
Media Armónica
Modelo 1
0.2
2.8267 × 10−28
Modelo 2
0.4
5.7061 × 10−21
Modelo 3
0.3
1.167 × 10−22
Modelo 4
0.25
1.8307 × 10−23
Modelo 5
0.45
3.9373 × 10−24
Modelo 6
0.5
1.4738 × 10−24
Al aplicar la media armónica a los seis modelos mostrados anteriormente se obtuvo que el λ
con mayor densidad en la data es λ = 0.4.
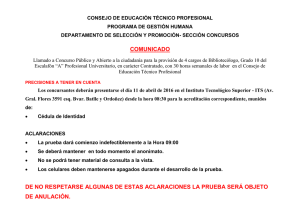
Producción (PIB)
Antes de presentar las predicciones, veamos el gráfico de los datos reales de la variable producción.
39
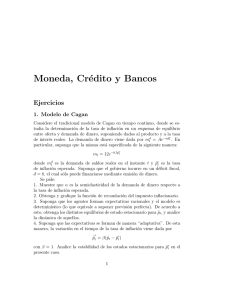
El siguiente gráfico se muestran las predicciones realizadas al producto.
En la gráfica anterior se observa que:
1. El comportamiento del VAR frecuentista es similar al BVAR de Litterman.
2. Los tres modelos no logran capturar la tendencia de la serie observada, sin embargo, el
modelo BVAR Schorfheide se aproxima a la observación a dos pasos.
En la siguiente tabla se presenta los emc a diferentes horizontes de predicción para el BVAR
de Schorfheide, BVAR Litterman y VAR frecuentista.
40
Pasos
BVAR Schorfheide
BVAR Litterman
VAR Frecuentista
1
0.734399
0.567623587
0.591989082
2
0.014556
0.12058251
0.125575827
3
0.062555
0.006014977
0.005155639
4
0.090359
0.19631715
0.191371402
5
0.037547
0.107933904
0.107561869
6
0.119836
0.221489736
0.221988793
7
0.170848
0.270977765
0.271498994
8
0.071334
0.134388875
0.134376422
En las siguientes tablas se presentan una comparación, especı́ficamente en el porcentaje de
mejora a cada paso entre el BVAR Schorfheide - BVAR Litterman y BVAR Schorfheide - VAR
frecuentista.
BVAR Schorfheide
BVAR Litterman
Mejoras
0.7344
0.5676
-29 %
0.0146
0.1206
88 %
0.0626
0.0060
-940 %
0.0904
0.1963
54 %
0.0375
0.1079
65 %
0.1198
0.2215
46 %
0.1708
0.2710
37 %
0.0713
0.1344
47 %
41
BVAR Schorfheide
VAR Frecuentista
Mejoras
0.73439942
0.591989082
-24 %
0.014555998
0.125575827
88 %
0.062555456
0.005155639
-1113 %
0.090359311
0.191371402
53 %
0.037547393
0.107561869
65 %
0.119835507
0.221988793
46 %
0.170847629
0.271498994
37 %
0.071334315
0.134376422
47 %
Observamos en las tablas anteriores que el modelo que minimiza el emc es el BVAR de
Schorfheide, especificamente seis pasos mejora con respecto al BVAR Litterman y el VAR Frecuentista.
Precios
El gráfico muestra los datos reales para los precios.
42
Inflación
El siguiente gráfico se muestran las predicciones realizadas a la inflación versus las observaciones.
Con respecto al gráfico anterior es importante señalar varios aspectos.
1. Al igual que en el gráfico de la producción el comportamiento del VAR frecuentista es
similar al BVAR bayesiano.
2. El modelo BVAR Schofheide se aproxima a las observaciones, especificamente a uno, tres
y cinco pasos.
En la siguiente tabla se presenta los emc a diferentes horizontes de predicción para el BVAR
de Schorfheide, BVAR Litterman y VAR frecuentista.
43
Pasos
BVAR Schorfheide
BVAR Litterman
VAR Frecuentista
1
0.000662
0.003341218
0.002023071
2
0.079766
0.050937133
0.051826581
3
0.000333
0.002429984
0.00173032
4
0.004529
0.000161226
0.000052
5
0.000099
0.003068368
0.00293295
6
0.016443
0.002464544
0.002837716
7
0.000087
0.006535544
0.006866534
8
0.035284
0.08130212
0.08098023
En la tabla anterior observamos el modelo BVAR Schorfheide en cinco pasos minimiza el
emc, por su parte el BVAR Litterman lo minimiza en dos pasos, sin embargo, de manera global
el BVAR Schorfheide es el modelo que minimiza el emc.
En las siguientes tablas se presentan una comparación especı́ficamente en el porcentaje de
mejora entre el BVAR Schorfheide - BVAR Litterman y BVAR Schorfheide - VAR Frecuentista.
BVAR Schorfheide
BVAR Litterman
Mejoras
0.0007
0.0033
80 %
0.0798
0.0509
-57 %
0.0003
0.0024
86 %
0.0045
0.0002
-2709 %
0.0001
0.0031
97 %
0.0164
0.0025
-567 %
0.0001
0.0065
99 %
0.0353
0.0813
57 %
44
BVAR Schorfheide
VAR Frecuentista
Mejoras
0.0007
0.0020
67 %
0.0798
0.0518
-54 %
0.0003
0.0017
81 %
0.0045
0.0001
-8679 %
0.0001
0.0029
97 %
0.0164
0.0028
-479 %
0.0001
0.0069
99 %
0.0353
0.0810
56 %
Observamos en las tablas anteriores que el modelo que minimiza el emc es el BVAR de
Schorfheide, especificamente cinco pasos mejora con respecto al BVAR Litterman y el VAR
Frecuentista.
Tasas de Interés
Antes de presentar las predicciones, veamos el gráfico de los datos reales de la variable tasas
de interés.
El siguiente gráfico se muestran las predicciones realizadas a las tasas de interés, versus las
45
observaciones.
Con referencia al gráfico anterior es importante señalar varios puntos.
1. Al igual que en el gráfico de la producción el comportamiento del var frecuentista es similar
al BVAR bayesiano
2. El modelo de BVAR Schofheide se aproxima a las observaciones especificamente los dos
primeros pasos.
En la siguiente tabla se presenta los emc a diferentes horizontes de predicción para el BVAR
de Schorfheide, BVAR Litterman y VAR frecuentista
46
Pasos
BVAR Schorfheide
BVAR Litterman
VAR Frecuentista
1
0.031465
0.212584102
0.270593176
2
0.082361
0.149846416
0.149795456
3
0.272058
0.282520389
0.278946746
4
0.461856
0.49866035
0.504386599
5
0.391461
0.30846908
0.304454886
6
0.127662
0.061641076
0.065554345
7
0.010969
0.067143841
0.067411344
8
0.198480
0.418770352
0.418999574
En la tabla anterior observamos el modelo BVAR Schorfheide en seis pasos minimiza el emc,
por su parte el BVAR Litterman lo minimiza en un paso al igual que el var frecuentista, sin
embargo, de manera global el BVAR Schorfheide es el modelo que minimiza el emc.
En las siguientes tablas se presentan una comparación especı́ficamente en el porcentaje de
mejora entre el BVAR Schorfheide - BVAR Litterman y BVAR Schorfheide - VAR Frecuentista.
BVAR Schorfheide
BVAR Litterman
Mejoras
0.0315
0.2126
85 %
0.0824
0.1498
45 %
0.2721
0.2825
4%
0.4619
0.4987
7%
0.3915
0.3085
-27 %
0.1277
0.0616
-107 %
0.0110
0.0671
84 %
0.1985
0.4188
53 %
47
BVAR Schorfheide
VAR Frecuentista
Mejoras
0.0315
0.2706
88 %
0.0824
0.1498
45 %
0.2721
0.2789
2%
0.4619
0.5044
8%
0.3915
0.3045
-29 %
0.1277
0.0656
-95 %
0.0110
0.0674
84 %
0.1985
0.4190
53 %
Observamos en las tablas anteriores que el modelo que minimiza el emc es el BVAR de
Schorfheide, especificamente seis pasos de mejora con respecto al BVAR Litterman y el VAR
Frecuentista.
En general, al realizar las predicciones a diferentes pasos para cada uno de los modelos, se
observa que el modelo que minimiza el emc es el BVAR Schorfheide, es decir, tiene un buen
desempeño predictivo.
3.1.3.
Data Venezolana
Para la data de Venezuela, se disponen de datos trimestrales desde el segundo trimestre
del año 1985 hasta junio del año 2008, con un total de 93 observaciones. Los modelos serán
estimados tomando en consideración los datos hasta el año 2006 y se realizarán predicciones
hasta el año 2008.
3.1.3.1.
Implementación del Modelo VAR reducido
Veamos la estimación del modelo para el caso Venezolano.
48
variable dependiente
Producto
R2
0.4559
N◦ de variables
13
N◦ de observaciones
81
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
-0.345324301
-3.287647
0.001601151
Producto
2
-0.237521972
-2.079006
0.041391476
Producto
3
-0.140157595
-1.223920
0.225206339
Producto
4
0.479515514
4.387339
4.09294E-05
Inflación
1
-0.160124003
-0.878792
0.382608952
Inflación
2
-0.099381456
-0.452355
0.652453252
Inflación
3
0.163314324
0.746654
0.457846201
Inflación
4
0.140571857
0.791323
0.431506914
Tasas
1
-0.031436504
-1.254754
0.213863594
Tasas
2
0.016679081
0.492220
0.624149387
Tasas
3
-0.036612555
-1.082001
0.283074164
Tasas
4
0.037937437
1.527385
0.131303573
Constante
-
0.044432976
1.132315
0.26147901
49
variable dependiente
Inflación
R2
0.5655
N◦ de variables
13
N◦ de observaciones
81
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
-0.052385691
-0.7363578
0.464045752
Producto
2
0.089125515
1.1517870
0.253442143
Producto
3
0.051830948
0.6682572
0.506231497
Producto
4
0.014115307
0.1906808
0.849343795
Inflación
1
0.773191831
6.2652010
2.90808E-08
Inflación
2
0.067687438
0.4548833
0.650642122
Inflación
3
-0.337402002
-2.2775140
0.025904889
Inflación
4
0.214706355
1.7845090
0.078801769
Tasas
1
-0.006739948
-0.3971907
0.692470829
Tasas
2
0.015730152
0.6853905
0.495427508
Tasas
3
-0.007355114
-0.3209262
0.749250536
Tasas
4
0.002812446
0.1671795
0.867724996
Constante
-
0.007549391
0.2840481
0.777236619
50
3.1.3.2.
variable dependiente
Tasas
R2
0.8031
N◦ de variables
13
N◦ de observaciones
81
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
0.67736638
1.2817460
0.204284944
Producto
2
0.491058405
0.8542900
0.395943973
Producto
3
0.526337766
0.9135264
0.364193494
Producto
4
0.621808369
1.1307730
0.262123182
Inflación
1
0.75129045
0.8195165
0.415354957
Inflación
2
-0.199844244
-0.1807947
0.85706649
Inflación
3
-0.279196644
-0.2537030
0.800490534
Inflación
4
0.142560255
0.1595050
0.873743851
Tasas
1
0.894987695
7.1000540
9.36516E-10
Tasas
2
0.170577342
1.0005260
0.320602942
Tasas
3
-0.171163425
-1.0053770
0.318279638
Tasas
4
-0.030113533
-0.2409698
0.810303605
Constante
-
0.365450717
1.8510190
0.068510093
Implementación del Modelo BVAR Litterman
Al igual que en la sección 1.3 los hiperparámetros con los cuales se realizó la estimación del
modelo son los siguientes:
θ = 0.1
0
θ1 = 1
θ = 0.5
2
En las siguientes tablas se presenta el ajuste realizado para cada ecuación del modelo.
51
variable dependiente
Producción
R2
0.4413
N◦ de variables
13
N◦ de observaciones
81
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
-0.342109241
-3.597651
0.000554435
Producto
2
-0.229369457
-2.288275
0.024760798
Producto
3
-0.137735751
-1.425104
0.158017126
Producto
4
0.392721966
4.401738
3.28731E-05
Inflación
1
-0.162423969
-1.056361
0.29398302
Inflación
2
-0.018592859
-0.114112
0.909435248
Inflación
3
0.075671465
0.554384
0.580862769
Inflación
4
0.108192671
0.983451
0.328350461
Tasas
1
-0.031645483
-1.546841
0.12584854
Tasas
2
0.007569638
0.315719
0.753038118
Tasas
3
-0.006790929
-0.351990
0.725771591
Tasas
4
0.015794021
1.087369
0.280138821
Constante
-
0.052927033
1.501483
0.137167671
52
variable dependiente
Inflación
R2
0.5618
N◦ de variables
13
N◦ de observaciones
81
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
-0.06381846
-1.053049
0.295488808
Producto
2
0.065695993
1.089970
0.278998832
Producto
3
0.030191235
0.556111
0.579686768
Producto
4
0.0047815
0.100567
0.92014585
Inflación
1
0.759526448
6.950432
8.83405E-10
Inflación
2
0.048365742
0.385262
0.701065993
Inflación
3
-0.265480548
-2.287563
0.024804291
Inflación
4
0.157041876
1.647267
0.1034258
Tasas
1
-0.004060343
-0.295156
0.768639398
Tasas
2
0.009262123
0.574209
0.567437465
Tasas
3
-0.003300319
-0.253873
0.800245004
Tasas
4
0.002159503
0.220419
0.826106205
Constante
-
0.010498942
0.451940
0.652535264
53
3.1.3.3.
variable dependiente
Tasas
R2
0.8014
N◦ de variables
13
N◦ de observaciones
81
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
0.484539905
1.0755170
0.285376181
Producto
2
0.24702824
0.5501002
0.583783312
Producto
3
0.251031137
0.6236147
0.534654722
Producto
4
0.283855745
0.8058494
0.422718602
Inflación
1
0.636589807
0.8271389
0.41061874
Inflación
2
-0.16273467
-0.1995899
0.842307753
Inflación
3
-0.239982234
-0.3518998
0.725838669
Inflación
4
0.053412309
0.0970557
0.922924888
Tasas
1
0.911513476
8.1853300
3.503E-12
Tasas
2
0.122797018
0.8590709
0.392868257
Tasas
3
-0.141019026
-1.0901780
0.278907509
Tasas
4
-0.037382014
-0.3905061
0.697200238
Constante
-
0.40626412
2.3218120
0.022787594
Implementación del Modelo BVAR Schorfheide
En está sección se implementa un BVAR Schorfheide. En las siguientes tablas se presenta el
ajuste realizado para cada ecuación del modelo.
54
variable dependiente
Producto
R2
0.080074
N◦ de variables
13
N◦ de observaciones
81
Variable
Rezago
coef.
Producto
1
0.095605
0.7000
0.48631
Producto
2
0.12175
0.8196
0.41531
Producto
3
-0.21602
-1.4507
0.15145
Producto
4
0.22481
1.5819
0.11832
Inflación
1
0.034204
0.1444
0.88564
Inflación
2
-0.1579
-0.5528
0.58224
Inflación
3
-0.058073
-0.2042
0.83882
Inflación
4
0.026018
0.1126
0.91065
Tasas
1
-0.027573
-0.8464
0.40029
Tasas
2
0.016019
0.3636
0.7173
Tasas
3
0.012302
0.2796
0.78063
Tasas
4
0.0055497
0.1718
0.86408
Constante
-
-0.003175
-0.0622
0.95057
55
t-estadı́stico p-valor
variable dependiente
Inflación
R2
0.24824
N◦ de variables
13
N◦ de observaciones
81
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
-0.038998
-0.4167
0.67818
Producto
2
-0.021113
-0.2074
0.83629
Producto
3
0.2849
2.7925
6.78E-03
Producto
4
0.10388
1.0668
0.28982
Inflación
1
0.041723
0.2570
0.79794
Inflación
2
0.37832
1.9329
5.74E-02
Inflación
3
-0.023907
-0.1227
0.90272
Inflación
4
0.0045967
0.0290
0.97691
Tasas
1
0.021189
0.9493
0.34584
Tasas
2
-0.012216
-0.4047
0.687
Tasas
3
-0.0030485
-0.1011
0.91975
Tasas
4
0.0097966
0.4427
0.65938
Constante
-
-0.0036968
-0.1057
0.9161
56
variable dependiente
Tasas
R2
.72495
N◦ de variables
13
N◦ de observaciones
81
Variable
Rezago
coef.
t-estadı́stico
p-valor
Producto
1
1.1156
1.78620
0.07853
Producto
2
-0.019916
-0.02932
0.9767
Producto
3
10,533
1.54680
0.12656
Producto
4
0.60615
0.93267
0.35429
Inflación
1
-0.048844
-0.04508
0.96417
Inflación
2
-0.34139
-0.26132
0.79463
Inflación
3
-0.13005
-0.09999
0.92065
Inflación
4
0.010546
0.00998
0.99206
Tasas
1
0.76784
5.15400
2.38E-02
Tasas
2
0.052529
0.26070
0.79511
Tasas
3
0.070731
0.35153
0.72628
Tasas
4
0.11791
0.79835
0.42745
Constante
-
-0.054948
-0.23549
0.81454
Al efectuar la comparación de los coeficientes estimados mediante el BVAR de Litterman,
BVAR Shorfheide, con los coeficientes del VAR, se observa que son similares, además, los coeficientes de las variables diferentes a la variable dependiente son cercanos a cero. Por otra parte,
el coeficiente de determinación R2 siempre es mayor en el modelo VAR.
3.1.3.4.
Desempeño predictivo de los modelos
En está sección se presentará las diferencias en cuanto al desempeño predictivo de los modelos
var frecuentistas, BVAR y BVAR (Litterman), a diferentes horizontes para el producto, inflación
y tasas de interés, para la de Venezuela. Esta comparación se hará haciendo énfasis en el error
cuadrático medio (ecm).
57
Por otra parte, es importante señalar los valores de λ que se emplean para cada variable
estudiada producción, inflación y tasas, especı́ficamente λ = 0.09, λ = 0.024 y λ = 2.8 respectivamente.
Producción (PIB)
Antes de presentar las predicciones, veamos el gráfico de los datos reales de la variable producción.
El siguiente gráfico se muestran las predicciones realizadas al producto versus las observaciones.
58
Con respecto a la gráfica anterior se señalara varias cosas.
1. Las predicción de los tres modelos captura la tendencia de la serie observada, sin embargo,
no logran capturar la magnitud de los picos, salvo la predicción a cuatro pasos en la que
los tres modelos se aproximan a la observación.
En la siguiente tabla se presenta los emc a diferentes horizontes de predicción para el BVAR
de Schorfheide, BVAR Litterman y VAR frecuentista.
Pasos
BVAR Schorfheide
BVAR Litterman
VAR Frecuentista
1
0.002790683
0.000822775
0.000815536
2
0.000532552
0.001387553
0.001287144
3
0.001579257
0.001338943
0.000881544
4
0.000130717
6.00641E-05
3.07644E-05
5
0.001093866
0.000563709
0.000580148
6
0.000443967
0.000774388
0.000759604
7
0.002330535
0.002245457
0.001805203
8
0.000390152
0.000312869
0.000215717
59
En las siguientes tablas se presentan una comparación especı́ficamente en el porcentaje de
mejora entre el BVAR Schorfheide - BVAR Litterman y BVAR Schorfheide - Var Frecuentista.
BVAR Schorfheide
BVAR Litterman
Mejoras
0.002790683
0.000822775
-239 %
0.000532552
0.001387553
62 %
0.001579257
0.001338943
-18 %
0.000130717
0.000060064096435
-118 %
0.001093866
0.000563709
-94 %
0.000443967
0.000774388
43 %
0.002330535
0.002245457
-4 %
0.000390152
0.000312869
-25 %
BVAR Schorfheide
VAR Frecuentista
Mejoras
0.002790683
0.000815536
-242 %
0.000532552
0.001287144
59 %
0.001579257
0.000881544
-79 %
0.000130717
0.000030764362710
-325 %
0.001093866
0.000580148
-89 %
0.000443967
0.000759604
42 %
0.002330535
0.001805203
-29 %
0.000390152
0.000215717
-81 %
Observamos en las tablas anteriores que el modelo que minimiza el EMC es el VAR Frecuentista. El modelo BVAR Schorfheide no tiene un buen desempeño predictivo.
60
Precios
El gráfico muestra los datos reales para los precios.
Inflación
El siguiente gráfico se muestran las predicciones realizadas a la inflación versus las observaciones.
Con respecto a la gráfica anterior se señalara varias cosas.
61
1. El comportamiento del VAR frecuentista tiene un comportamiento análogo al BVAR
bayesiano.
2. El modelo BVAR Schorfheide se aproxima a las observaciones especificamente a uno y a
dos pasos.
En la siguiente tabla se presenta los emc a diferentes horizontes de predicción para el BVAR
de Schorfheide, BVAR Litterman y VAR frecuentista.
Pasos
BVAR Schorfheide
BVAR Litterman
VAR Frecuentista
1
0.000132466
0.000511253
0.000556081
2
1.12312E-05
0.000119504
0.00010753
3
0.000280285
0.00029206
0.000258868
4
4.41302E-05
8.27899E-05
8.50407E-05
5
0.000298335
0.000210023
0.000178373
6
0.000254682
0.000193322
0.000218064
7
2.98326E-05
2.50044E-05
3.70985E-05
8
7.48786E-06
1.11808E-07
2.05384E-07
En las siguientes tablas se presentan una comparación especı́ficamente en el porcentaje de
mejora entre el BVAR Schorfheide - BVAR Litterman y BVAR Schorfheide - VAR Frecuentista.
62
BVAR Schorfheide
BVAR Litterman
Mejoras
0.000132466
0.000511253
74 %
0.00001123116482
0.000119504
91 %
0.000280285
0.00029206
4%
0.000044130196188
0.000082789927093
47 %
0.000298335
0.000210023
-42 %
0.000254682
0.000193322
-32 %
0.00002983258903
0.000025004437030
-19 %
0.00000748786005
0.00000011180835
-6597 %
BVAR Schorfheide
VAR Frecuentista
Mejoras
0.000132466
0.000556081
76.18 %
0.000011231164821
0.00010753
89.56 %
0.000280285
0.000258868
-8.27 %
0.000044130196188
0.000085040744917
48.11 %
0.000298335
0.000178373
-67.25 %
0.000254682
0.000218064
-16.79 %
0.00002983258903
0.000037098509114
19.59 %
0.00000748786005
0.000000205384118
-3545.78 %
En las tablas anteriores observamos que el modelo BVAR Schorfheide al igual que el VAR
frecuentista minimiza el emc en cuatro pasos.
63
Tasas de Interés
Antes de presentar las predicciones, veamos el gráfico de los datos reales de la variable tasas
de interés.
El siguiente gráfico se muestran las predicciones realizadas a las tasas de interés versus las
observaciones.
64
Con respecto al gráfico es importante señalar varios aspectos.
1. Al igual que la variable inflación el comportamiento del var frecuentista tiene un comportamiento análogo al BVAR bayesiano.
2. El modelo BVAR Schorfheide se aproxima a las observaciones especificamente a dos, a
tres y cuatro pasos.
En la siguiente tabla se presenta los emc a diferentes horizontes de predicción para el BVAR
de Schorfheide, BVAR Litterman y VAR frecuentista.
Pasos
BVAR Schorfheide
BVAR Litterman
VAR Frecuentista
1
0.014753551
0.009776647
0.011169841
2
0.019278642
0.023830927
0.025326173
3
0.022126834
0.031663189
0.029906861
4
0.024469374
0.037530727
0.036952769
5
0.019174829
0.030041389
0.028888061
6
0.018270548
0.031139086
0.028944256
7
0.00235321
0.008028705
0.005971765
8
0.000949434
0.000150039
1.20069E-06
En la tabla anterior observamos que que el modelo BVAR Schorfheide minimiza el emc en
seis pasos.
En las siguientes tablas se presentan una comparación especı́ficamente en el porcentaje de
mejora entre el BVAR Schorfheide - BVAR Litterman y BVAR Schorfheide - VAR Frecuentista.
65
BVAR Schorfheide
BVAR Litterman
Mejoras
0.014753551
0.009776647
-51 %
0.019278642
0.023830927
19 %
0.022126834
0.031663189
30 %
0.024469374
0.037530727
35 %
0.019174829
0.030041389
36 %
0.018270548
0.031139086
41 %
0.00235321
0.008028705
71 %
0.000949434
0.000150039
-533 %
BVAR Schorfheide
VAR Frecuentista
Mejoras
0.014753551
0.011169841
-32 %
0.019278642
0.025326173
24 %
0.022126834
0.029906861
26 %
0.024469374
0.036952769
34 %
0.019174829
0.028888061
34 %
0.018270548
0.028944256
37 %
0.00235321
0.005971765
61 %
0.000949434
0.000001200687627
-78974 %
Observamos en las dos tablas anteriores que el modelo BVAR Schorfheide tiene una mejora
en seis pasos con respecto al BVAR Litterman y el VAR Frecuentista.
En general, al realizar las predicciones a diferentes pasos para cada uno de los modelos, se
observa que el modelo BVAR Schorfheide no tiene un buen desempeño predictivo en comparación
a los otros modelos y esto se evidencia en los errores medio cuadrático.
66
Consideraciones Finales
En los resultados de la implementación de los tres modelos, se tiene que para el caso de la
data de EEUU, el modelo BVAR Schorfheide tiene un buen desempeño predictivo en contraste
con el BVAR de Litterman y el VAR frecuentista. Sin embargo, para la data Venezolana no
ocurre de forma similar y esto se evidenció cuando se determinó el error medio cuadrático (emc)
a diferentes pasos para cada modelo estudiado.
El modelo estocástico de equilibro general (MEEG) considerado en este trabajo no es adecuado para la economı́a Venezolana, una de las posibles causas, es porque se trabaja con un modelo
pequeño (tiene tres variables, con tres shocks), además, al observar los gráficos de las variables
reales, se puede evidenciar que el comportamiento de la economı́a en Venezuela es muy diferente
a la economı́a de EEUU. Por ello el MEEG que se debe implementar debe estar adaptado a
las caracterı́sticas propias de la economı́a de Venezuela, en este sentido para explicar mejor la
economı́a será necesario incluir más variables que no han sido estudiadas en este trabajo.
67
Referencias
[1] F.C. Ballabriga, A. González, L. Julián, and J. Jareño Morago. Un modelo macroeconómico
Bvar para la economı́a española: metodologı́a y resultados. Estudios económicos, ISSN
0213, 2699(64):1–125, 1998.
[2] D. Barráez, Bolı́var W., and Cartaya V. Métodos Bayesianos para la predicción de variables
macroeconómicas en Venezuela. Revista BCV, XXII(2):146–168, 2008.
[3] W. Bolı́var. Predicción de variables macroeconómicas mediante VAR bayesianos: una aplicación al caso venezolano. Tesis de Maestrı́a, Postgrado en Modelos Aleatorios,Universidad
Central de Venezuela, 2007.
[4] M. Del Negro and F. Schorfheide. Priors from General Equilibrium Models for VARS.
International Economic Review, 45(2):643–673, 2004.
[5] T. Doan, R. Litterman, and C. Sims. Forecasting and conditional projection using realistic
prior distributions. Federal Reserve Bank of Minneapolis, report 93, 1986.
[6] A. Gelfand and D. Dey. Bayesian Model Choice: Asymptotics and Exact Calculations.
Journal of the Royal Statistical Society Series B, 5(56):501–514, 1994.
[7] J. Geweke. Using simulation methods for bayesian econometric models: inference, development, and communication. Technical report, 1998.
[8] R.B. Litterman. Techniques of Forecasting Using Vector Autoregressions. 1981.
[9] H. Lütkepohl. New Introduction to Multiple Time Series Analysis. Springer, 2005.
68
[10] N. Metropolis and S. Ulam. The Monte Carlo method. Journal of the American Statistical
Association, 44(247):335–41, 1949.
[11] C. Sims. Macroeconomics and Reality. Econometrica, 48(1), 1980.
[12] C. Sims. Solving Linear Rational Expectations Models. Computational Economics, 20(1):1–
20, 2002.
[13] A. Zellner. An Introduction to Bayesian Inference in Econometrics. New York, John Wiley
y Sons, 1971.
69
Apéndice A
Algoritmo de C. Sims
El algoritmo de Sims [12] presenta una solución robusta en términos computacionales para los
modelos lineales con expectativas racionales, basados en la descomposición de Schur. Cualquier
modelo con expectativas racionales, sea discreto o continuo puede ser resuelto empleando este
algoritmo. El modelo tiene la siguiente forma,
Γ0 y(t) = Γ1 y(t − 1) + C + Ψz(t) + Πη(t),
con t = 1, ..., T , C es un vector de constantes, z(t) es la variable exógena, η(t) es el error de
expectativas que sastisface Et [η(t + 1)] = 0
En el caso de este trabajo el sistema de expectativas racionales está dado por las ecuaciones
(1.11), (1.13), (1.15) - (1.17) (presentadas en el capı́tulo I). Este sistema de ecuaciones puede
ser reescrito como,
Γ0 (θ)st = Γ1 (θ)st−1 + C + Ψ(θ)zt + Π(θ)ηt ,
donde,
et , R∗ , get , zet , E[e
s0t = (e
xt , π
et , R
xt+1 ], E[e
πt+1 ]).
0t = (R,t , g,t , z,t ).
ηt0 = (e
xt − Et−1 (e
xt ), π
et − Et−1 (e
πt )).
Las matrices están dadas por,
70
1
0
−κ
1
0
0
−ψ2 −ψ1
Γ0 =
0
0
0
0
1
0
0
1
Γ1 =
0 0
0 0
0
0
0
0
0
1/τ
−(1 − ρg ) −ρz /τ −1 −1/τ
0
0
0
κ
0
0
1
−(1 − ρR )
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0 0
0
0
0
0 0
0 0 ρR 0
0
0
0 0
0 0
0
0
0
0
0 0
0 0
0
0 ρg
0
0 0
0 0
0
0
0
ρz 0 0
0 0
0
0
0
0
1 0
0 0
0
0
0
0
0 1
,
C=
0
0
0
0
0
0
0
0
,
Ψ=
0 0 0
0 0 0
1 0 0
0 0 0
0 1 0
0 0 1
0 0 0
0 0 0
−β
0
0
,
0
0
0
0
,
Π=
0 0
0 0
0 0
0 0
0 0
0 0
1 0
0 1
.
Al resolver el sistema por medio del algoritmo de Sims, nos conduce a la ecuación de transición
(2.16) expuesta en el capı́tulo III,
st = T (θ)st−1 + R(θ)t ,
(A.1)
La ecuación de medida de (2.17) puede escribirse de forma apilada de la siguiente forma,
yt = Z(θ)st + D(θ) + νt .
(A.2)
En la implementación νt es cero. Las matrices T y R son obtenidas por medio del algoritmo
de Sims, el vector de espacios de estados es aumentado con “e
xt−1 ”, es decir,
et , R∗ , get , zet , E[e
s0t = (e
xt , π
et , R
xt+1 ], E[e
πt+1 ], x
et−1 ).
71
y las matrices Z, D son de la siguiente forma,
1 0 0 0 0 1 0 0 1
Z = 0 1 0 0 0 0 0 0 0 ,
0 0 4 0 0 0 0 0 0
lnγ
D = lnπ ∗
4lnR∗
,
donde, lnR∗ = lnr∗ + lnπ ∗
Verifiquemos que yt = Z(θ)st + D(θ) es igual a las ecuaciones (1.18).
x
et
π
et
e
Rt
R∗
lnγ
∆lnXt
1 0 0 0 0 1 0 0 1
+ lnπ ∗
∆lnPt = 0 1 0 0 0 0 0 0 0 ×
get
a
4lnR∗
lnRt
0 0 4 0 0 0 0 0 0
zet
E[e
xt+1 ]
E[e
πt+1 ]
x
et−1
∆lnXt
lnγ + ∆e
xt + zet
∆lnPt =
lnπ ∗ + π
et
et + lnr∗ + lnπ ∗ ]
lnRta
4[R
.
Observamos que la ecuación (A.3), es igual a la ecuación (1.18).
72
(A.3)
Apéndice B
Programas en matlab
Para implementar el modelo BVAR del Negro y Shorfheide [4], se realizaron un conjunto de
programas en MATLAB1 versión 7.0. Estos programas realizan lo siguiente: procesamiento de
los datos, implementación del modelo, densidad a priori, cálculo de la verosimilitud y la densidad
a posteriori. Además, se realizan predicciones y se comparan el desempeño de los modelos.
Se describirá a continuación los programas.
1. procesamiento data.m Lee los datos desde Excel (con el comando “xslread”) y los
procesa para introducirlos en el modelo. Las salidas están dadas de la siguiente manera:
Salida de la función
∆lnXt
Primera diferencia del Producto
∆lnPt
Primera diferencia de los Precios
lnRta
Logaritmo de las Tasas Anualizadas
2. modelo.m Función donde está el vector de parámetros del MEEG y las matrices provenientes del sistema de expectativas racionales dado por las ecuaciones (1.11), (1.13),
(1.15) - (1.17)
3. priori.m Donde está la densidad a priori de los parámetros
4. verosimilitud.m Calcula la función de verosimilitud
1
c
Matlab 1984-2008
es marca registrada de MathWorks, Inc.
73
5. posterior.m Calcula la densidad posterior de los parámetros.
6. fgeweke.m función propuesta por Geweke [7] para calcular la función de verosimilitud
marginal.
7. marginalmodificado.m Calcula el tamaño de λ para el cual tiene la mayor densidad de
los datos. Para ello utilizamos fgeweke.m
8. prediccionpib.m Realiza la predicción del producto para los tres modelos (BVAR Schorfheide, BVAR Litterman, VAR frecuentista)
9. prediccioninflacion.m Realiza la predicción de la inflación para los tres modelos
10. predicciontasas.m Realiza la predicción de las tasas para los tres modelos
Para las funciones prediccionpib, prediccióninflacion y predicciontasas sus entradas y salidas
son las siguientes:
Entrada de la función
datos
Observaciones con las cuales se estima el modelo
nfor
Horizonte de predicción
nlag
Número de rezagos del modelo
lambda
El valor de λ
nobs
Número de observaciones del modelo
Salida de la función
fcasts
Predicción
emc
El Error Medio Cuadrático
74
Apéndice C
Gráficos de las Simulaciones
C.1.
Data EEUU
Figura C.1: Simulaciones de los parámetros 1 (data EEUU)
75
Figura C.2: Simulaciones de los parámetros 2 (data EEUU)
76
Figura C.3: Simulaciones de las autocorrelaciones (data EEUU)
77
Figura C.4: Simulaciones de los shocks (data EEUU)
C.2.
Data Venezolana
78
Figura C.5: Simulaciones de los parámetros 1(data Venezolana)
79
Figura C.6: Simulaciones de los parámetros 2 (data Venezolana)
Figura C.7: Simulaciones de las autocorrelaciones (data Venezolana)
80
Figura C.8: Simulaciones de los shocks (data Venezolana)
81