r - Tesis Electrónicas UACh - Universidad Austral de Chile
Anuncio

UNIVERSIDAD AUSTRAL DE CHILE
Facultad de Ciencias de la Ingeniería
Escuela de Ingeniería Civil Acústica
Profesor Patrocinante:
Dr. Jorge P. Arenas
Instituto de Acústica
Universidad Austral de Chile
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE
MEDICIÓN DE FRF Y APLICACIÓN EN ANÁLISIS MODAL
DE VIBRACIONES
Tesis presentada como parte de los
requisitos para optar al título profesional
de Ingeniero Civil Acústico.
Roberto Andrés Pereira Torres
Valdivia, Chile
Agosto 2008
AGRADECIMIENTOS
Dedico este trabajo a mi Madre
El viento del mar envidia tu libertad.
Fuente inagotable de amor, sabiduría y vida.
Agradezco sinceramente:
Al proyecto FONDECYT Nº 1060117 por el financiamiento de esta tesis y por su
valioso aporte al desarrollo de la investigación científica en Chile.
Al Profesor Jorge Arenas del Instituto de Acústica de la Universidad Austral de
Chile, por su gran calidad humana y valiosa guía académica.
A Don Víctor Cumián por su invaluable ayuda, compañía y por su siempre
excelente disposición durante todo este trabajo.
A mi Padre Jaime Pereira, por siempre inculcar el valor de la educación en mí y
en mis queridísimos hermanos Loreto y Javier. No puedo dejar de agradecer a toda
mi Familia por su constante apoyo y preocupación.
Al cuerpo docente y funcionarios del Instituto de Acústica de la Universidad
Austral de Chile por su enorme labor y por la excelencia que siempre demuestran.
A mis amigos y colegas Jorge Letelier, Juan Andrés Oliveros, Joaquín Stevens,
Daniel Sánchez, Juán Luis Aguayo, Joaquín Solís y Cristóbal Albarracín por el
valioso aporte brindado en distintas etapas de este trabajo.
A mis amigos y compañeros por todas las experiencias que hemos compartido.
Agradezco además a Juika-Bloth por la oportunidad de desarrollarme como músico
y guitarrista, y al Preuniversitario Solidario San Francisco por darme la oportunidad
de aportar con un granito de arena al sueño de muchos de vivir en un país más justo.
A las Circunstancias, al Poder de la Crítica y del Análisis, a la Energía, a la
Simpleza, a la Complejidad, a Valdivia, a la Guitarra, a la Música y a la Naturaleza
por permitir la existencia de la Belleza y desarrollar la Pasión.
Finalmente a mi querida Kekita, por regalarme su hermosa sonrisa cada día.
1
ÍNDICE
ÍNDICE ........................................................................................................................................2
RESUMEN ..................................................................................................................................4
SUMMARY.................................................................................................................................5
INTRODUCCIÓN.......................................................................................................................6
OBJETIVOS ................................................................................................................................7
Objetivo General .....................................................................................................................7
Objetivos Específicos..............................................................................................................7
1. TEORÍA DEL ANÁLISIS MODAL .....................................................................................8
1.1 Supuestos Básicos.............................................................................................................8
1.2. Teoría Modal....................................................................................................................8
1.2.1. Desacoplamiento de un sistema vibratorio MDOF................................................8
1.2.2. Función de Respuesta de Frecuencia....................................................................11
1.2.3. Tipos de Funciones de Respuesta de Frecuencia .................................................14
2. ANÁLISIS MODAL EXPERIMENTAL............................................................................16
2.1. Cadena Básica de Medición ..........................................................................................16
2.1.1. Introducción ............................................................................................................16
2.1.2. Excitación de la Estructura....................................................................................16
2.1.3. Transducción Mecánico - Eléctrica ......................................................................17
2.1.4. Conversión Análogo Digital y Analizador............................................................19
2.2. Procesamiento Digital de Señales.................................................................................19
2.2.1. Introducción ............................................................................................................19
2.2.2. Aliasing....................................................................................................................20
2.2.3. Transformada Discreta de Fourier .......................................................................20
2.2.4. Fuga Espectral........................................................................................................21
2.3. Determinación de la Función de Respuesta de Frecuencia y Coherencia ..................22
2.3.1. Proceso General de Obtención de FRF y Función de Coherencia .....................22
2.3.2. Estimación de la FRF.............................................................................................23
2.3.3. Estimación de la Función de Coherencia .............................................................24
2.4. Extracción de los Parámetros Modales.........................................................................24
2.4.1. Clasificación de los métodos de Identificación ....................................................24
2.4.2. Método de Extracción de Peaks.............................................................................25
3. METODOLOGÍA .................................................................................................................27
3.1. Metodología General de Medición y Análisis..............................................................27
3.2. Instrumentación Disponible ..........................................................................................27
3.3. Uso y Estructura del Software de Cálculo de FRF y Función de Coherencia ...........28
3.3.1. Introducción ............................................................................................................28
3.3.2. Sistema Multicanal y Advertencias de Posibles Errores en la Configuración...29
3.3.3. Configuración de Parámetros de Adquisición de Datos......................................30
3.3.4. Configuración y Cálculo de FRF y Función de Coherencia ...............................31
3.3.5. Visualización...........................................................................................................32
3.3.6. Selección de Display y Advertencias de Errores en Selección de Visualización34
3.3.7. Exportación de Datos a Matlab.............................................................................34
3.3.8. Diagrama de Flujo General...................................................................................35
2
3.4. Procedimientos de Medición.........................................................................................37
3.4.1. Barra Empotrada-Libre .........................................................................................37
3.4.2. Placa Libre en sus Cuatro Bordes.........................................................................39
4. RESULTADOS Y ANÁLISIS .............................................................................................42
4.1. Barra Empotrada Libre ..................................................................................................42
4.1.1. Predicciones Teóricas ............................................................................................42
4.1.2. Resultados de Mediciones ......................................................................................43
4.1.3. Análisis y Comparación entre Predicciones Teóricas y Mediciones ..................45
4.2. Placa Libre en sus Cuatro Bordes .................................................................................53
4.2.1. Predicciones Teóricas ............................................................................................53
4.2.2. Resultados de Mediciones ......................................................................................54
4.2.3. Análisis y Comparación entre Predicciones Teóricas y Mediciones ..................58
5. CONCLUSIONES ................................................................................................................71
5.1. Conclusiones Generales.................................................................................................71
5.2. Conclusiones Específicas ..............................................................................................71
6. REFERENCIAS BIBLIOGRÁFICAS.................................................................................72
3
RESUMEN
El presente documento plantea metódicamente el trabajo requerido para el diseño e
implementación de un sistema multicanal de medición de funciones de respuesta de
frecuencia (FRF), enfocado al análisis modal de vibraciones, usando la instrumentación
disponible en el Instituto de Acústica de la Universidad Austral de Chile.
El trabajo consiste en constituir las conexiones necesarias para el correcto flujo y
procesamiento analógico de las señales eléctricas captadas por los sensores piezoeléctricos
disponibles, junto con la programación en Labview 6i de un software que realice el
procesamiento digital de las señales captadas y que brinde diversos tipos de utilidades al
usuario.
Se diseñaron y llevaron a cabo experimentos para la realización de mediciones de FRF a
una barra empotrada - libre y a una placa libre en sus cuatro bordes, con el fin de
reconstruir los respectivos modos de vibración de ambas estructuras mediante el método de
extracción de peaks. En el caso de la barra, existe evidente correspondencia entre los
resultados experimentales y las predicciones teóricas, tanto en las formas de modo como en
las frecuencias naturales detectadas. En la placa no se observa correspondencia alguna entre
el modelo teórico y los resultados obtenidos a partir de las FRF medidas, obteniéndose
posibles frecuencias naturales y modos de vibración distintos a los indicados en las
referencias. Se considera como principal causa de esta disparidad a la diferencia entre el
tipo de montaje utilizado en la referencia y el montaje planteado en el presente trabajo.
4
SUMMARY
This work presents the steps required for the design and implementation of a Frequency
Response Function (FRF) multichannel measurement system, focused on the vibration
modal analysis, by using the available instrumentation on the Institute of Acoustics of the
Universidad Austral de Chile.
The work consists on constituting the necessary connections for the correct flow and
analogical processing of the electric signals measured by piezolectric sensors, as well as the
programming of a signal processing software in Labview 6i that offers diverse types of
utilities to the user.
FRF measurements were done over a free – clamped bar and over a completely free
square plate in order to get the vibration mode shapes of both structures by using the peak
extraction method. In the bar case, evident correspondence exists between the experimental
results and the theoretical predictions. No correspondence is observed between the
theoretical model and the results obtained from the measured FRF for the plate. The
possible natural frequencies and mode shapes obtained were different from the indicated in
the references. The main reason for this disparity is considered to be the difference between
the set up used in the reference and the one presented in this work.
5
INTRODUCCIÓN
En el ámbito del diseño y en el control de ruido y vibraciones es fundamental el
conocimiento de las frecuencias naturales y modos de vibración propias del sistema bajo
análisis. Cualquier cuerpo sometido a vibraciones mecánicas puede resultar dañado por
éstas si no ha sido correctamente diseñado, además de presentar serias deficiencias en su
desempeño.
El análisis modal experimental se basa en la medición de funciones de respuesta de
frecuencia (FRF) y permite, mediante diversos métodos, determinar el valor de los
parámetros modales de un sistema.
El diseño e implementación de un sistema de medición de FRF permitirá obtener
información clave sobre la respuesta de un cuerpo cuando es sometido a fuerzas, bajo
diversas condiciones operacionales. A la vez, el sistema planteado permitirá realizar la
validación de diversos modelos analíticos predictivos y podrá ser utilizado en la realización
de variadas actividades pedagógicas.
6
OBJETIVOS
Objetivo General
El objetivo general de esta tesis será la implementación completa de un sistema de
medición de FRF para ser aplicado en análisis modal de vibraciones.
Objetivos Específicos
•
Realización de investigación y estudio de la teoría y práctica del análisis modal.
•
Programación de software que permitirá el cálculo inmediato de FRF y brindará
otras utilidades al usuario.
•
Integración del software diseñado con el hardware disponible en un sistema global
de medición de FRF.
•
Demostración de la fiabilidad del sistema determinando experimentalmente las
frecuencias de resonancia y formas de modo de una barra empotrada – libre y de
una placa libre en sus cuatro bordes.
•
Comparación de los resultados obtenidos en las mediciones con los obtenidos
mediante el modelo teórico.
7
Capítulo 1 – Teoría del Análisis Modal
1. TEORÍA DEL ANÁLISIS MODAL
1.1 Supuestos Básicos
Cada estructura sometida al análisis modal debe cumplir con 4 supuestos básicos [6]:
1. La estructura tiene un comportamiento lineal: La respuesta de la estructura a cualquier
combinación de fuerzas aplicadas de manera simultánea será la suma de las respuestas
individuales a cada fuerza que actúa sobre el cuerpo. Además, la respuesta de la
estructura es proporcional a la excitación.
2. La estructura es invariante en el tiempo: Los parámetros a determinar son constantes en
el tiempo.
3. La estructura satisface la Ley de Reciprocidad de Maxwell: La respuesta de la
estructura en el grado de libertad q , debido a la fuerza aplicada en el grado de libertad
p, es igual a la respuesta en el grado de libertad p debido a la fuerza aplicada en el grado
de libertad q.
4. La estructura es observable: Las mediciones realizadas deben contener suficiente
información para la obtención de un modelo adecuado que describa el comportamiento
de la estructura.
1.2. Teoría Modal
1.2.1. Desacoplamiento de un sistema vibratorio MDOF
El comportamiento vibratorio de un sistema de N grados de libertad que cumple con los
requerimientos expuestos en la sección 1.1 puede representarse mediante el sistema de N
ecuaciones diferenciales
[ M ]{ x(t )} + [C ]{ x(t )} + [ K ]{ x(t )} = { f (t )} ,
donde
[ M ] , [C ]
y
[K ]
(1.1)
son matrices de orden NxN llamadas matrices de masa,
amortiguamiento y rigidez, respectivamente,
{ f (t )}
representa la fuerza aplicada y los
vectores { x(t )} , { x(t )} y { x(t )} corresponden a la aceleración, velocidad y desplazamiento
del sistema.
El amortiguamiento viscoso es aceptado como una buena aproximación al
amortiguamiento de estructuras reales [1]. La presencia de este tipo de amortiguamiento en
el sistema descrito por la ecuación (1.1) no permite el cálculo de vectores propios que
permitan un desacoplamiento directo de las ecuaciones. Sin embargo, la reformulación del
sistema mediante la representación ‘espacio – estado’ es una técnica comúnmente utilizada
8
Capítulo 1 – Teoría del Análisis Modal
para su resolución [12]. Esta representación convierte el sistema original compuesto de N
ecuaciones, en uno compuesto por 2N ecuaciones lineales definiendo un vector de estado
{x(t )}
{x(t )}
{y(t )}2 Nx1 =
.
(1.2)
Utilizando la ecuación (1.2) se puede reescribir el sistema como
[ A]{y (t )}+ [B]{y(t )} = { f ' (t )},
[C ] [M ]
donde [ A] =
[M ] [0]
[K ]
y [B ] =
[0]
[0]
− [M ]
(1.3)
.
Si bien las matrices [ A] y [B ] contienen elementos distintos de cero fuera de la diagonal
principal, que no permiten el desacoplamiento directo de las ecuaciones, es posible realizar
una transformación de coordenadas que permite cumplir este propósito.
Cada sistema vibratorio posee frecuencias y modos naturales de vibración que definen
su comportamiento ante cualquier tipo de excitación [1,2,4,5,6]. El cálculo de estas
frecuencias y modos naturales está directamente asociado al cálculo de valores y vectores
propios de matrices [4] y requiere de la solución de la ecuación homogénea asociada a la
ecuación (1.1)
[M ]{x(t )} + [C ]{x(t )} + [K ]{x(t )} = {0}
(1.4)
Asumiendo una solución a la ecuación de movimiento de la forma:
{x(t )} = {x}e st ,
(1.5)
y sustituyendo en la ecuación (1.4) [1,2] se obtiene
[s [M ] + s[C ] + [K ]]{x} = {0} .
2
(1.6)
La solución del problema planteado en la ecuación (1.6) constituye un problema de
valores y vectores propios complejo, por lo que se obtendrán 2N soluciones (pares
conjugados), de la forma
sr , s r *
r = 1,..., N
(1.7)
{ψ }r , {ψ }r *
donde sr representa el r-ésimo valor propio y {ψ }r su vector propio asociado [1].
Volviendo a la ecuación (1.3), y asumiendo que la respuesta del sistema espacio estado
puede representarse como una superposición de las 2N respuestas del sistema, dentro del
espacio modal [2,3] se puede decir que
9
Capítulo 1 – Teoría del Análisis Modal
{y(t )} =
{ }=
donde ψ
'
r
{ψ r }
s r {ψ r }
2N
{ψ }p (t ) ,
'
r
r =1
(1.8)
r
.
(1.9)
Reescribiendo la ecuación (1.8) en forma matricial:
{y(t )} = [ψ ']{p(t )} ,
(1.10)
{ }
donde la r-ésima columna de la Matriz Modal [ψ '] corresponde al vector ψ r' y donde
{p(t )} representa la coordenada modal .
La transformación de coordenadas físicas a coordenadas modales implica que los modos
de vibración de la estructura o vectores propios definidos en la ecuación (1.9), conforman
un nuevo sistema de referencia que permite expresar en coordenadas modales cualquier
movimiento de la estructura [2] y que además provee un método para desacoplar el sistema
planteado en la ecuación (1.1) [1,2,3]. Una explicación mas detallada respecto a este
cambio de coordenadas y diversos aspectos relacionados se puede encontrar en las
referencias [2] y [4].
Sustituyendo la ecuación (1.10) en la ecuación (1.4) y premultiplicando por la matriz
[ψ ']T , se obtiene:
[ψ ']T [ A][ψ ']{p(t )}+ [ψ ']T [B ][ψ ']{p(t )} = {0}
(1.11)
La propiedad de ortogonalidad [1,2,3,4] del modelo modal permite el desacoplamiento
del sistema, ya que
[ψ ']T [ A][ψ '] = diag(ar )
[ψ ']T [B ][ψ '] = diag(br ) ,
(1.12)
en donde diag ( a r ) y diag (br ) representan matrices diagonales.
{ }
Como el vector modal ψ r' representa la respuesta relativa entre los distintos grados de
libertad del sistema, se realiza un proceso de normalización de estos vectores que permite
obtener un parámetro característico del sistema [1]. El proceso de normalización que más
relevancia tiene dentro del análisis modal es el de la ortonormalización con respecto a la
matriz [ A] , es decir
[φ ']T [A][φ '] = [I ]
[φ ']T [B ][φ '] = diag ( − s r )
(1.13)
10
Capítulo 1 – Teoría del Análisis Modal
donde la columna {φ r } =
1
{ψ r } es el vector modal normalizado, − s r = br y representa
ar
ar
la solución de la ecuación característica del sistema e [I ] es la matriz identidad [3,12].
Al reemplazar la ecuación (1.10) en 1.3, luego reemplazar el vector [ψ '] por el vector
normalizado [φ '] , posteriormente premultiplicar por el vector [φ '] y finalmente utilizar la
propiedad de ortonormalidad descrita en la ecuación (1.13), se obtiene que
T
{ p(t )} − diag (sr ) { p(t )} =
1
[φ ']T { f '(t )}
ar
(1.14)
De esta manera el sistema original descrito en la ecuación (1.1) ha sido desacoplado y en
su lugar existen 2N ecuaciones diferenciales independientes. Para cada una de estas
ecuaciones diferenciales se cumple que [1,6,12]
s r = − wr ξ r + wr 1 − ξ r2 ,
(1.15)
en donde wr y ξ r representan la frecuencia natural y factor de amortiguamiento crítico
asociados al correspondiente modo.
Cada modo de vibración tiene un comportamiento similar al de un modelo masa–
resorte−amortiguador de un grado de libertad (SDOF). En otras palabras, el sistema original
(Ec. 1.1) ha sido descompuesto en 2N modelos aislados de un solo grado de libertad [2,3,6].
1.2.2. Función de Respuesta de Frecuencia
El comportamiento de los sistemas vibratorios puede modelarse a partir de la relación
existente entre la fuerza de excitación y la respuesta provocada (desplazamiento, velocidad,
aceleración) [2], como ilustra la siguiente figura
f (t )
x(t )
Sistema
h (t )
Figura 1.1: Relación entre fuerza y desplazamiento.
En el dominio del tiempo, la respuesta del sistema a un impulso es llamada respuesta al
impulso y se representa como h(t ) . En el dominio de la frecuencia la relación H ( w) ,
llamada función de respuesta de frecuencia (FRF), corresponde a la razón existente entre la
excitación y la respuesta del sistema
H ( w) =
X ( w)
.
F ( w)
(1.16)
11
Capítulo 1 – Teoría del Análisis Modal
Esta función contiene toda la información correspondiente a las propiedades del sistema.
Uno de los métodos matemáticos utilizados para la obtención de la FRF, en el caso del
análisis modal de vibraciones, requiere de la utilización de la transformada de Laplace
[2,3]. La transformada de Laplace de una función f (t ) se define como
∞
F ( s ) = e− st f (t )dt ,
(1.17)
0
donde s = σ + jw es llamada la variable de Laplace. Al aplicar la transformada de Laplace
a la ecuación (1.13) y asumiendo condiciones iniciales iguales a cero, se obtiene la
expresión
1
ar
[ s − sr ]{P( s)} = [ψ ']T {F '(s)} .
(1.18)
Aplicando la transformada de Laplace a la ecuación (1.10) y despejando la matriz, luego
reemplazando en la ecuación (1.18) y finalmente premultiplicando por la matriz [ψ '] , se
obtiene
−1
{Y (s )} =
2N
{ψ }{ψ }
i =1
ar ( s − sr )
' T
r
'
r
{ F '(s )} .
(1.19)
Finalmente, volviendo al sistema original y despejando la expresión
{ X (s )} , se obtiene
{F (s )}
la función de transferencia
{ X ( s)} = 2 N {ψ r }{ψ r }
H (s) =
{ F (s )} i =1 ar (s − sr )
T
(1.20)
.
Como los valores y vectores propios utilizados en la ecuación (1.20) corresponden a un
conjunto de N pares conjugados, se puede reescribir esta ecuación como:
T
T
{
ψ r* }{ψ r* }
{
X ( s)} N {ψ r }{ψ r }
H ( s) =
=
+
{F (s )} r =1 a r (s − s r ) a r* (s − s r* )
,
con
s r = −σ r + jwdr ,
(1.21)
(1.22)
donde σ r = wr ξ r es llamado factor de amortiguamiento modal y wdr = wr 1 − ξ r2 se
denomina frecuencia modal amortiguada.
12
Capítulo 1 – Teoría del Análisis Modal
Debido a que, en el análisis modal experimental, tanto la excitación como la respuesta
del sistema pueden ser medidas en el dominio de la frecuencia, resulta ser de suma utilidad
evaluar la función de transferencia (Ec. 1.21) a lo largo del eje s = jw , para obtener así la
llamada función de respuesta de frecuencia (FRF):
{ X ( jw)} = N
H
s
H
jw
(
)
(
)
=
=
[
] s = jw [
]
{ F ( jw)} r =1
[ Rr ]
donde
{
ψ r }{ψ r }T
[Rr ] =
ar
( jw − sr )
+
Rr*
( jw − s )
*
r
,
(1.23)
es llamado matriz residuo. La ecuación (1.23) puede reescribirse
como:
[H ( jw)] =
Ar + jwB r
,
2
r =1 ( w − w ) + 2 jξ r wr w
N
(1.24)
2
r
donde Ar = −2[Re( Rr ) Re( s r ) + Im( Rr ) Im( s r )] y Br = 2 Re( Rr ) y donde el término
Ar + jwBr es llamado constante modal. La constante modal es un número complejo que
contiene la información sobre el movimiento relativo existente entre los distintos grados de
libertad que componen el sistema vibratorio. A partir de este término, se pueden obtener las
formas de los modos de vibración.
El análisis modal experimental se basa en las mediciones de respuestas de frecuencia
debido a una excitación realizada en el punto k y a una respuesta medida en el punto j.
Dentro de la matriz [H ( jw)] , esta medición correspondería al elemento
[H ( jw)] jk = h jk ( w) . La expresión correspondiente a este término es
h jk ( w) =
n
r =1
[ψ ] jr [ψ ]kr (1 − β r2 ) − 2 jβ r ξ r
(
wr2 a r (1 − β r2 ) 2 + 4 β r2ξ r2
)
,
(1.25)
donde β r = ξ r + ξ r2 + 1 .
Es conveniente realizar un análisis de las implicancias físicas que algunas de las
variables y fórmulas expuestas en el desarrollo matemático tienen en el comportamiento
vibratorio de la estructura.
La información entregada por el factor de amortiguamiento σ r y la frecuencia natural
amortiguada wdr (Ec. 1.22) correspondiente al modo r puede ser visualizada más
claramente examinando la función de respuesta al impulso del sistema. Esta función se
obtiene aplicando la transformada inversa de Fourier a la función de respuesta de
frecuencia (Ec. 1.23)
13
Capítulo 1 – Teoría del Análisis Modal
[H (t )] =
N
r =1
[ ]
e −σ r t ([Rr ]e jwdr t + Rr* e − jwdr t )
(1.26)
En el caso de un sistema masa – resorte - amortiguador de un grado de libertad (SDOF),
la respuesta al impulso tiene la siguiente forma
h(t ) = xˆe − woξt e iwo
1−ξ 2 t
(1.27)
= xˆe −σt e iwd t
En la figura 1.2 se observa que el factor de amortiguamiento determina la rapidez con la
cual la amplitud de la masa de la estructura decae, mientras que la frecuencia natural
amortiguada determina la cantidad de oscilaciones por segundo de la masa.
1
0.8
e
0.6
−σt
Respuesta
0.4
0.2
0
-0.2
-0.4
(
-0.6
Re e iw d t
-0.8
-1
0
1
2
3
2π
w d
)
4
5
6
Tiempo [seg]
7
8
9
10
Figura 1.2: Implicancia física del factor de amortiguamiento y la frecuencia natural
amortiguada en la respuesta al impulso de un sistema SDOF.
1.2.3. Tipos de Funciones de Respuesta de Frecuencia
Las funciones de respuesta de frecuencia son evaluadas a través de la razón existente
entre la salida y entrada a un sistema. En el ámbito de la dinámica estructural, las salidas
pueden corresponder ya sea a la aceleración, velocidad o desplazamiento. Es muy común la
utilización de acelerómetros para la medición de la respuesta del sistema. La función de
X ( w)
, en donde F (w) es la
transferencia resultante en este caso corresponde a w 2
F ( w)
trasformada de Fourier de la entrada (fuerza) y w 2 X ( w) es la transformada de Fourier de la
salida (aceleración). La Tabla 1.1 es un resumen de los nombres utilizados para la
denominación de los distintos tipos de funciones de transferencia:
14
Capítulo 1 – Teoría del Análisis Modal
Parámetro de Respuesta
R
Desplazamiento
Velocidad
Aceleración
R/F
F/R
(Estándar)
(Inversa)
-Receptancia
-Admitancia
-Rigidez Dinámica
-Compliancia Dinámica
-Flexibilidad Dinámica
-Mobilidad
-Impedancia Mecánica
-Inertancia
-Masa Aparente
-Acelerancia
Tabla 1.1: Distintos tipos de FRF [1].
15
Capítulo 2 - Análisis Modal Experimental
2. ANÁLISIS MODAL EXPERIMENTAL
2.1. Cadena Básica de Medición
2.1.1. Introducción
Si bien existen diversas configuraciones en cuanto al equipamiento requerido para la
medición de FRF, en términos generales existen tres etapas comunes a cualquier tipo de
sistema de medición:
-
Mecanismo de Excitación: en el caso del análisis modal experimental, el martillo
de impacto y el shaker son los mecanismos de excitación de la estructura más
habituales.
-
Mecanismo de Transducción: convierte los parámetros mecánicos de interés en
señales eléctricas proporcionales. Los transductores de mayor uso son los
acelerómetros y transductores de fuerza.
-
Analizador: permite la realización de los cálculos requeridos para la obtención de la
FRF, además de brindar otras prestaciones tales como la visualización de la FRF y
de las señales en el dominio del tiempo y de la frecuencia
Generador
Generador
Control
Control
Amplificador
Amplificadorde
de
Potencia
Potencia
Shaker
Shaker
Monitor
Monitor
Analizador
Analizador
Acondicionadores
Acondicionadores
de
deSeñal
Señal
Estructura
Acelerómetro Transductor
de Fuerza
Figura 2.1: Cadena básica de medición [1].
2.1.2. Excitación de la Estructura
Al medir FRF, la estructura debe ser excitada por una fuerza dinámica mensurable. No
existen restricciones teóricas para la forma de onda de la fuerza empleada. De todas formas,
ciertos parámetros deben ser considerados al elegir el tipo de excitación a utilizar:
-
Aplicación: Depende de la precisión requerida en los resultados, así como del
tiempo e instrumentación disponibles.
16
Capítulo 2 - Análisis Modal Experimental
-
Control de Espectro: Es la capacidad de limitar el contenido espectral de la
excitación al rango de frecuencias de interés. Este problema puede ser fácilmente
controlado si se dispone de un filtro antialiasing o de un ecualizador.
-
Factor de Cresta: Se define como la razón entre el peak y la desviación estándar de
la señal. Altos factores de cresta producen una disminución de la relación señal-ruido
y pueden, además, provocar un comportamiento no lineal de la estructura.
La excitación puede ser provocada por mecanismos unidos a la estructura o por
mecanismos que provocan un impacto impulsivo sobre la estructura. Los mecanismos de
excitación de uso mas generalizado son los Martillos de Impacto y los Shakers ElectroMagnéticos (Fig. 2.2).
Agujero Ranurado
Guía
Protección Elástica
Bobina
Suspensión
Carcaza
Magneto
Estructura
Magnética
Apoyo
Figura 2.2: Shaker electro-magnético [21].
2.1.3. Transducción Mecánico - Eléctrica
Al momento de excitar la estructura, tanto la excitación como la respuesta deben ser
medidas para obtener la FRF deseada. Este proceso requiere del uso de transductores
mecánico-eléctricos.
Los transductores que han alcanzado mayor uso en la actualidad son los transductores
piezoeléctricos. Estos dispositivos funcionan en base a la propiedad de los materiales
piezoeléctricos de generar una carga eléctrica cuando son sometidos a fuerzas mecánicas.
Este tipo de transductores poseen tamaño pequeño, baja masa y han demostrado tener
buena linealidad, amplio rango dinámico y buen funcionamiento dentro de un extenso
rango de frecuencia.
17
Capítulo 2 - Análisis Modal Experimental
En el caso de los sensores de fuerza, la fuerza F transmitida se aplica directamente a
través del cristal piezoeléctrico, el que a la vez genera una carga q proporcional a F .
F
Cristales Piezoeléctricos
q
+
F
Carcaza
Figura 2.3: Principio de funcionamiento de sensor de fuerza [1].
Para la medición de respuesta del sistema se utilizan generalmente acelerómetros
piezoeléctricos. La fuerza aplicada sobre el material piezoeléctrico se realiza mediante una
masa sísmica. El movimiento de la estructura provocará el movimiento de la masa, la que
ejercerá una fuerza sobre los cristales piezoeléctricos proporcional a la aceleración.
Finalmente, los cristales generarán una carga eléctrica proporcional a la aceleración de la
masa. El principio general de funcionamiento de estos acelerómetros puede ser visto en la
figura 2.4:
Resorte de Precompresión
Masa Sísmica
m
Cristales
q
Cuerpo
M
Figura 2.4: Principio de funcionamiento de un acelerómetro de tipo compresión [1].
Las resonancias presentes en estos acelerómetros y que definen el rango de frecuencias
de trabajo dependen, en gran medida, del tipo de montaje que se utilice (Fig. 2.5)
18
Capítulo 2 - Análisis Modal Experimental
Doble
Magneto
Magneto
Plano
Cojinete
Goma
Adhesiva
Cemento
DesviacióndeSensibilidad
Fijación
Manual
Frecuencia (Hz)
Figura 2.5: Efectos del tipo de montaje en el rango de funcionamiento de un
acelerómetro [19].
2.1.4. Conversión Análogo Digital y Analizador
La conversión de una señal continua a una discreta se realiza mediante un conversor
análogo digital. Estos dispositivos toman muestras discretas x[n ] de la señal continua x(t )
cada cierto período de tiempo T determinado por la frecuencia de muestreo f s . La
cantidad de bits del conversor condicionará la fidelidad en cuanto a amplitud de la muestra
x[n ] , respecto al correspondiente valor de la señal original.
La mayoría de los analizadores utilizados actualmente son los llamados ‘Analizadores
Digitales de Espectro’ y permiten el cálculo directo (utilizando la Transformada Discreta de
Fourier), del contenido espectral, tanto de las señales de entrada y de salida, de las FRF y
permiten además al usuario emitir señales. En el caso de los analizadores más costosos se
puede realizar el cálculo directo de las propiedades modales del sistema bajo estudio.
2.2. Procesamiento Digital de Señales
2.2.1. Introducción
El análisis de las señales en el dominio discreto requiere de una serie de pasos y
consideraciones necesarias para la correcta obtención de resultados y minimización de los
errores propios del proceso de discretización. En los siguientes puntos se plantea la
importancia que la Transformada Discreta de Fourier tiene en el proceso de discretización y
análisis de señales.
La figura 2.6. muestra los pasos básicos del proceso del análisis de Fourier en tiempo
discreto, para una señal en tiempo continuo.
19
Capítulo 2 - Análisis Modal Experimental
Filtro Antialiassing
sc (t)
Conversión A/D
x
x[n]
xc (t)
Haa( jΩ)
DFT
v[n]
V [k]
w[n]
Figura 2.6: Pasos del proceso del análisis de Fourier [20].
2.2.2. Aliasing
Uno de los principales problemas asociados a la discretización de señales continuas es el
llamado solapamiento o aliasing. Si la señal original contiene componentes de frecuencias
mayores a 2 veces la frecuencia de muestreo f s , no será interpretada correctamente por el
analizador (Fig. 2.7). Las componentes de frecuencias altas se interpretarán como más
bajas, lo que generará ‘distorsión por solapamiento’.
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
0
2
4
6
8
10
12
14
16
18
20
Figura 2.7: El fenómeno del aliasing.
Los filtros antialiasing representan una solución a este problema, permitiendo controlar
el contenido espectral de la señal mediante la aplicación un filtro pasa-bajos antes de
ingresar a la etapa de conversión A/D.
2.2.3. Transformada Discreta de Fourier
La Transformada Discreta de Fourier (DFT) permite el cálculo del espectro de una señal
discreta. El proceso de representación en el dominio de la frecuencia es reversible y se
realiza mediante la llamada Transformada Discreta de Fourier Inversa (IDFT). Los
algoritmos que permiten el cálculo están dados por las fórmulas
IDFT: x( n) =
1
N
N −1
X ( k )e j 2πkn / N ; 0 ≤ n ≤ N − 1
(2.1)
k =0
20
Capítulo 2 - Análisis Modal Experimental
DFT: X ( K ) =
N −1
X (n )e j 2πkn / N ; 0 ≤ n ≤ N − 1
(2.2)
n=0
donde N es el largo del registro y tamaño de la DFT.
Con el fin de reducir los tiempos de cálculo, se ha planteado un algoritmo eficiente de
cálculo de la DFT, llamado Transformada Rápida de Fourier (FFT). El tiempo requerido
para el cálculo de la FFT es de aproximadamente N log 2 N , mientras que el requerido para
el cálculo de la DFT es de N 2 . Es importante mencionar que la FFT asume para su
utilización que la señal analizada es periódica.
2.2.4. Fuga Espectral
Este problema se produce debido al incumplimiento por parte de una señal finita del
requerimiento de periodicidad de la FFT. En la figura 2.8 se observa una señal sinusoidal
que no cumple con este requerimiento, por lo que la aplicación de la FFT no arroja una
única línea espectral, corrompiéndose así su verdadero contenido en el dominio de la
frecuencia.
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
0
1
2
3
4
5
0
t
f
Figura 2.8: Fuga espectral.
El control de las fugas espectrales intenta reducir las amplitudes de los lóbulos laterales
que aparecen debido al registro de datos finitos. Una solución práctica a este problema es la
aplicación de una función ventana. En el dominio temporal, las ventanas ayudan a que la
señal satisfaga de mejor manera los requerimientos de periodicidad de la FFT (Fig. 2.9). En
el análisis modal experimental, es de uso común la ventana Exponencial para las pruebas de
impacto y el uso de la ventana Hanning para las pruebas con señales de excitación
aleatorias.
21
Capítulo 2 - Análisis Modal Experimental
Señal Aleatoria
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
7000
8000
9000
10000
Señal Aleatoria Enventanada
0.8
0.6
0.4
0.2
0
1000
2000
3000
4000
5000
6000
Figura 2.9: Aplicación de ventana Hanning a señal aleatoria.
2.3. Determinación de la Función de Respuesta de Frecuencia y Coherencia
2.3.1. Proceso General de Obtención de FRF y Función de Coherencia
Conviene plantear un esquema que resuma todos los pasos requeridos para la obtención
de la FRF y de la coherencia entre dos señales. El siguiente esquema emula el proceso
seguido por dos señales en un analizador FFT de dos canales.
Canal de Excitación
F
G
FX
XX
H
FF
1
Ventana
F
x (n )
x (t )
G
G
F
F (w )
f (n )
f (t)
*
X (w )
*
X
Ventana
G
X
*
G
X
XX
Canal de Respuesta
Muestreo y
Cuantización
Transformación
Mediciones
γ
FX
Estimación
Espectral
2
G
G
H
G
G
XF
2
XF
G
FF
2
XX
XF
Post Proceso
Presentaciones
Figura 2.10: Analizador FFT de dos canales [13].
22
Capítulo 2 - Análisis Modal Experimental
Las secciones de ‘Muestreo y Cuantización’ y ‘Transformación’ (figura 2.10) ya fueron
expuestas en las secciones 2.1.4 y 2.2.3, respectivamente. A continuación, se realiza un
breve análisis de los procesos realizados en las secciones ‘Estimación Espectral’ y ‘Post
Proceso’.
2.3.2. Estimación de la FRF
Idealmente la obtención de la FRF debería realizarse simplemente mediante el cálculo
de la razón entre el espectro de la respuesta del sistema y el espectro de la fuerza aplicada.
Sin embargo, en la práctica, la presencia de ruido mecánico o eléctrico en las distintas
etapas de la medición (Fig. 2.11), hacen necesario el uso de diversas herramientas
estadísticas que permiten minimizar estos problemas.
Fuerza
Ruido
Respuesta Real
H (w)
++
Fuerza Medida
Ruido
++
Respuesta Medida
Figura 2.11: Presencia de ruido en mediciones [13].
El principio de los mínimos cuadrados [24] permite minimizar el efecto del ruido en la
salida:
N prom
H 1 (w ) =
Fi* ( w) X i ( w)
i =1
N prom
=
Fi * ( w) Fi ( w)
G FX ( w)
,
G FF ( w)
(2.3)
i =1
donde GFX (w) es el espectro cruzado entre la respuesta y la fuerza y donde GFF (w) es el
autoespectro de la fuerza.
El ruido en la entrada del sistema puede minimizarse de manera análoga:
N prom
H 2 (w ) =
X i* ( w) X i ( w)
i =1
N prom
*
i
X ( w) Fi ( w)
=
G XX ( w)
,
G XF ( w)
(2.4)
i =1
donde G XF (w) es el espectro cruzado entre la fuerza y la respuesta y donde G XX (w) es el
autoespectro de la respuesta.
23
Capítulo 2 - Análisis Modal Experimental
Finalmente H 1 (w) y H 2 (w) conforman los límites del intervalo de confianza para la
verdadera FRF, H (w) :
H 1 (w) ≤ H ( w) ≤ H 2 (w)
(2.5)
2.3.3. Estimación de la Función de Coherencia
La función de coherencia otorga una forma de corroborar el grado de linealidad entre
una señal de entrada y una de salida. Esta función se define como:
2
G XF ( w)
H ( w)
,
=
γ ( w) = 1
H 2 ( w) G XX ( w)G FF ( w)
2
(2.6)
donde 0 ≤ γ ( w) 2 ≤ 1 .
En términos generales, la coherencia adopta el valor 1 si no existe ruido presente en las
mediciones y el valor cero si sólo existe ruido en las mediciones. En el caso de las
resonancias, el valor de esta función será cero [1,4].
2.4. Extracción de los Parámetros Modales
2.4.1. Clasificación de los métodos de Identificación
Los distintos métodos de extracción de parámetros modales pueden clasificarse de varias
formas. Algunos de estos métodos trabajan en el dominio del tiempo y otros en el dominio
de la frecuencia. A su vez, estos métodos pueden clasificarse como directos (identificación
de la FRF basada en el modelo modal), o indirectos (identificación de la FRF basada en el
modelo espacial).
Existe también una clasificación que indica la utilidad de los métodos al enfrentarse a
distintos grados de acoplamientos modales. En el caso que la FRF muestre un acoplamiento
modal ligero (modos relativamente independientes o aislados entre sí), el análisis SDOF
puede dar resultados exactos. En el caso de un fuerte acoplamiento modal o de tener modos
muy cercanos, el análisis MDOF se hace necesario.
Algunos métodos de análisis modal pueden procesar sólo una FRF a la vez (métodos
SISO), mientras que otros métodos pueden trabajar con varias FRF a la vez, en donde la
fuerza se aplica siempre en el mismo punto y la respuesta se mide en distintos lugares
(métodos SIMO o globales). Finalmente, existen métodos que trabajan con FRF obtenidas
variando tanto los puntos de excitación como los de medición de respuesta (métodos
MIMO o de polireferencia).
La figura 2.12 es un resumen de los distintos métodos de extracción:
24
Capítulo 2 - Análisis Modal Experimental
Indirecto
MDOF
Dominio del
Tiempo
Directo
SISO
CE
SSTD
SIMO
LSCE
ITD
MIMO
PRCE
ERA
SISO
ARMA
MDOF
MIMO
Métodos de
Identificación
SDOF
SISO
Quadrature Response
Max. Quad. Comp.
Kennedy – Pancu
Circle Fitting
Inverse
Bendent
Peak Amplitude
SISO
GSH
Ewins-Gleeson
FDPM
CEFD
RFP
SIMO
GRFP
GLOBAL
MIMO
ERD-FD
PRFD
SIMO
SFD
ISSPA
SIMO
Spectral
Multi-Matrix
Indirecto
Dominio de
la Frecuencia
MDOF
DSPI
Directo
MDOF
Figura 2.12: Clasificación de lo métodos de extracción de parámetros modales [26].
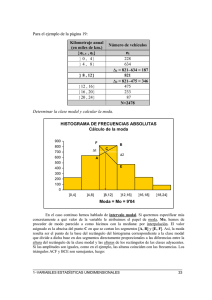
2.4.2. Método de Extracción de Peaks
Como ya se demostró en la sección 1.2.1, el sistema original acoplado de N grados de
libertad se descompuso en subsistemas de un grado de libertad. La expresión para la FRF,
correspondiente al modo r es [2]:
2
w
(1 −
wr
hr ( w) =
) − 2i
2
w
wr m r (1 −
wr
cr
2 k r mr
modal, respectivamente.
(2.7)
,
en donde ξ r =
w
ξr
wr
2
w
) +4
wr
2
ξ r2
y mr , kr , cr corresponden a la masa, rigidez y amortiguamiento
Al evaluar la expresión 2.7 en la frecuencia natural w = wr , la parte real de la ecuación
se iguala a cero, por lo que tanto la magnitud como la fase de hr (w) dependen sólo de su
25
Capítulo 2 - Análisis Modal Experimental
parte imaginaria. De esta forma, al realizar mediciones en una estructura dada y luego de
obtener la parte imaginaria de la FRF, es posible determinar las formas de los modos que
gobiernan el comportamiento vibratorio de la estructura [2,5]. Esto es posible debido a que
la respuesta del sistema es igual al producto de la FRF y la transformada de Fourier de la
excitación. Como la respuesta del sistema es proporcional a la excitación, puede asumirse
que la respuesta del sistema en w = wr será proporcional a la FRF evaluada en w = wr , lo
que hace válida la utilización de la parte imaginaria de la FRF para la obtención gráfica de
los modos de vibración de la estructura.
El procedimiento se realiza de la siguiente manera:
1. Luego de haber realizado las mediciones de las distintas hij (w) ( i constante en el
caso de utilización de martillo de impacto, j constante si se utiliza un shaker), se
analizan cuidadosamente las partes imaginarias de las FRF medidas, registrando el
valor de los peaks correspondientes a ondas de pliegue. Es necesario también registrar
la posición del punto en el cual se realizó la medición. Esto será equivalente a
registrar una fila de la matriz función de transferencia (prueba de impacto), o una
columna (shaker).
2. Posteriormente, se traza una curva que une los peaks registrados en las posiciones
correspondientes. Diversos métodos de interpolación pueden ser utilizados en esta
etapa del análisis (interpolación lineal, cuadrática, splin cúbico, bilineal, bicúbica ,
entre otros). De esta manera, se reconstruirán las formas de modo correspondientes.
La figura 2.13 es un ejemplo de reconstrucción de modo para un barra empotrada
libre.
Im(h2 j )
f (Hz )
f (Hz )
f (Hz )
Figura 2.13: Reconstrucción del segundo modo de vibración para barra empotrada libre
mediante el método de extracción de peaks [5].
En las secciones 4.1.3 y 4.2.3 se describe el proceso de obtención de las formas de
modos de vibración de una barra empotrada – libre y de una placa libre en sus cuatro
bordes, mediante este método aplicado a datos obtenidos experimentalmente.
Finalmente, debe mencionarse que la utilización de este método no es adecuada cuando
las estructuras presentan una alta densidad modal. Las contribuciones energéticas de los
modos cercanos pueden provocar alteraciones en el valor de la FRF evaluada en w = wr .
26
Capítulo 3 – Metodología
3. METODOLOGÍA
3.1. Metodología General de Medición y Análisis
Se implementó un sistema de medición de FRF aplicado al análisis modal de vibraciones
usando la instrumentación y softwares disponibles en el Instituto de Acústica de la
Universidad Austral de Chile. Además, se diseñaron dos experimentos cuyos resultados ya
han sido estudiados y modelados, con el fin de poder comparar los resultados obtenidos
mediante mediciones, con los obtenidos utilizando la teoría.
El software utilizado para el procesamiento de los datos adquiridos y la obtención,
visualización y almacenamiento de las FRF y funciones de Coherencia, fue programado en
LabView 6i.
El análisis posterior se realizó utilizando Matlab. La figura 3.1 es un resumen del
sistema de trabajo utilizado:
PC:
PC:
-LabView
-LabView6i6i
-Matlab
-MatlabR12
R12
Acondicionadores
de Señal
Conversor
ConversorA/D
A/D
Reproductor
Reproductorde
deCD
CD
Ecualizador
Ecualizador
Amplificador
Amplificador
Shaker
Shaker
Estructura
Acelerómetro Sensor de
Fuerza
Figura 3.1: Esquema general de trabajo.
Este sistema de medición se basa en las propuestas planteadas en las referencias
[1,3,4,5].
3.2. Instrumentación Disponible
El siguiente es el equipamiento con el cual se implementó el sistema de medición y se
realizaron las respectivas mediciones:
1. Acelerómetros PCB Piezotronics 352C67 (2 gramos) y 352C22 (0,5 gramos).
27
Capítulo 3 – Metodología
2. Sensor de fuerza PCB Piezotronics 209C01 .
3. 2 acondicionadores de señal PCB Piezotronics 480C02 .
4. Shaker Bruel & Kjaer 4810.
5. Front End NI BNC-2090.
6. Conversor A/D NI PCI-6036E.
7. Amplificador Samson Servo 260.
8. Ecualizador Behringer Ultragraph Pro, modelo FBQ 6200.
9. Reproductor American Audio MCD-110.
10. Cables.
11. Software LabView 6i.
12. Software Matlab R12.
13. Barra de Aluminio de 40cm x 1,9 cm x 0,3 cm.
14. Placa de Aluminio de 80cm x 80cm x 0,2 cm.
15. Prensas, barras de hierro, material aislante, bloque de cemento para
empotramiento de la barra, etc.
3.3. Uso y Estructura del Software de Cálculo de FRF y Función de Coherencia
3.3.1. Introducción
LabView es un lenguaje de programación diseñado especialmente para la adquisición y
procesamiento de datos obtenidos mediante mediciones. Este lenguaje ofrece paquetes de
funciones prediseñadas llamadas ‘Sub VI’s’ (Sub Virtual Instruments), que pueden ser
directamente utilizadas por el programador.
Vale la pena mencionar que, debido a la naturaleza gráfica de programación utilizada en
LabView y a la gran cantidad de subfunciones requeridas para la realización del programa
‘VibronMulti2’, se revisará el software por secciones y se analizarán las subfunciones que
poseen mayor importancia dentro del algoritmo diseñado, ya que un análisis absolutamente
detallado del diagrama de flujo general del programa no puede ser realizado en formato
28
Capítulo 3 – Metodología
tesis por razones de espacio. Si algún interesado desea realizar un examen detallado al
diagrama de flujo, puede acceder directamente al programa que se encuentra en el CD
adjunto.
3.3.2. Sistema Multicanal y Advertencias de Posibles Errores en la Configuración
Se permite la medición simultánea de hasta 7 ó 12 FRF y funciones de coherencia
(según el número de sensores de fuerza utilizados). Ha sido diseñado de este modo para así
poder utilizar todos los canales (en modo diferencial), del Front End BNC 2090. El usuario
definirá los canales a utilizar en el panel de control (Fig 3.2), teniendo en cuenta los
siguientes pasos:
1. Configurar el número de sensores de fuerza y acelerómetros a utilizar: Por defecto
el número de sensores de fuerza y de acelerómetros es uno, ya que este modo de
trabajo es el más usual. Sin embargo, se brinda la posibilidad de utilizar hasta 7
acelerómetros e incluso dos sensores de fuerza en caso de que se requiera verificar o
comparar con rapidez la utilización de dos sensores o tipos de excitación distintos.
Es importante destacar que, en este caso, el uso de dos sensores de fuerza no es para
el cálculo de FRF utilizando múltiples excitaciones.
2. Asignar a cada sensor y a cada acelerómetro un número de canal específico: por
ejemplo, si en el paso a) se selecciona una cantidad de 1 sensor de fuerza y 3
acelerómetros, sólo las ventanas Sensor 1, Ac 1, Ac 2 y Ac 3 tendrán utilidad, ya
que el número escrito en las ventanas Ac 4, Ac 5, Ac 6 y Ac 7 no será considerado
por el algoritmo.
Figura 3.2: Configuracón de canales.
3. Verificar si la ventana ‘Advertencia Canales’ emite algún aviso: Estas advertencias
no corresponden necesariamente a errores. En el caso de advertencias visibles, el
usuario deberá verificar si el mensaje emitido se aplica a su configuración. El
usuario podrá revisar el contenido de cada mensaje presionando las teclas
29
Capítulo 3 – Metodología
Control+H y situando el cursor sobre esta ventana. La configuración de canales que
el software trae por defecto no posee errores, en cualquier caso ésta puede utilizarse
como alternativa segura, variando solamente el número de acelerómetros o sensores
de fuerza si el usuario así lo requiere.
3.3.3. Configuración de Parámetros de Adquisición de Datos
LabView 6i también ofrece un paquete de funciones o ‘Sub VI’s ‘(Sub Virtual
Instruments), prediseñadas y destinadas a la configuración de la adquisición de datos. La
primera de estas subfunciones en ser utilizada corresponde a ‘AI Acquire Waveforms.vi’
(Fig. 3.3.a). Esta subfunción constituye el nexo entre LabView y la tarjeta de adquisición,
permitiendo controlar los siguientes parámetros:
a) Tarjeta de adquisición de datos a utilizar: La opción ‘device’ corresponde al número
asignado a la tarjeta de adquisición utilizada. En este caso el número es 1.
b) Canales a utilizar: La opción ‘channels’ especifica que canales de la tarjeta serán
utilizados.
c) Número de muestras por canal: La opción ‘number of samples/ch’, corresponde al
número de muestras que serán almacenadas y con las cuales se realizarán las
distintas operaciones matemáticas requeridas para los cálculos asociados a la
obtención de la FRF.
d) Frecuencia de muestreo: La opción ‘scan rate’ permite seleccionar la frecuencia de
muestreo.
Figura 3.3.a: Sub función ‘AI Acquire Waveforms.vi’ y configuración de parámetros de
adquisición de datos.
30
Capítulo 3 – Metodología
e) La salida ‘waveforms’ es un arreglo de 2 dimensiones que contiene la información
adquirida en todos los canales. Cada columna de este arreglo contiene información
sobre una muestra de información y sobre el canal del cual esa muestra proviene.
Como la información de los canales viene contenida en un solo arreglo (‘waveforms’),
es necesario filtrar la información proveniente de cada uno de estos canales. La separación
de las señales en arreglos que contengan las formas de onda de algún canal específico, se
realiza mediante la subfunción ‘Index Waveform Array.vi’ (Fig. 3.3.b).
Figura 3.3.b: Sub función ‘Index Waveform Array.vi’.
a) La entrada ‘waveformarray’ es la misma salida ‘waveforms’ proveniente de la
subfunción ‘AI Acquire Waveforms.vi’.
b) ‘Index’ corresponde al número de canal del cual se desea extraer la información.
c) La salida ‘waveform’ corresponde finalmente a la forma de onda proveniente por el
canal especificado en ‘index’.
3.3.4. Configuración y Cálculo de FRF y Función de Coherencia
Labview proporciona una subfunción (‘Frequency Response Function (Mag-Phase).vi’),
incorporada directamente en el programa realizado que permite el cálculo directo de la
FRF y de la función de coherencia. Esta subfunción permite ingresar directamente las
distintas señales, variables, parámetros y otra subfunciones requeridas para su
funcionamiento (Fig. 3.4)
Figura 3.4: Entradas y salidas de Sub VI ‘Frequency Response Function (Mag-Phase).vi’.
31
Capítulo 3 – Metodología
a) Las entradas ‘time signal x’ y ‘time signal y’ corresponden a las señales de
excitación y de respuesta, respectivamente y corresponden a las salidas ‘waveform’
de los sub VI ‘Index Waveform Array.vi’.
b) ‘Window’ permite el uso, si así se requiere, de cualquiera de las funciones ventana
proporcionadas por esta versión de LabView . Las ventanas disponibles son:
Hanning, Hamming, Blackman-Harris, Exact-Blackman, Blackman, Flat Top, 4
Term B-Harris, 7 Term B-Harris, Low Sidelobe. En las mediciones se utilizó la
ventana Hanning debido a que es recomendada para las mediciones con ruido
aleatorio.
c) ‘Averaging parameters’ permite la realización de promediaciones si así se requiere.
Esta herramienta permite controlar el ‘modo de promediación’ (Vector Averaging,
RMS Averaging), el ‘modo de ponderación’ (Linear, Exponential) y el número de
promediaciones requeridas. En las mediciones se utilizó en el modo de
promediación RMS una ponderación lineal, debido a que de esta manera la FRF se
estabilizaba más rápidamente.
d) ‘FRF mode’ permite seleccionar el tipo de FRF que se desea obtener ( H1 , H 2 o
H 3 ). Para la mayor parte de las mediciones, se utilizó H1 pues los resultados
obtenidos coincidían de mejor forma con los obtenidos teóricamente.
Las salidas de esta subfunción (Fig. 3.4) se describen a continuación:
e) ‘Averaging Done’ es un indicador luminoso que se activa cuando las
promediaciones fueron realizadas.
f) ‘Magnitude’ y ‘Phase’ corresponden a la magnitud y fase de la FRF, en el dominio
de la frecuencia.
g) ‘Coherence’ corresponde a la respectiva función de coherencia.
h) ‘Averages completed’ indica cuantas promediaciones han sido realizadas.
3.3.5. Visualización
El programa posee 5 ventanas en las cuales se puede visualizar:
a) La forma de onda de la señal proveniente desde el sensor de fuerza (Fig. 3.5.a),
b) la forma de onda de la señal proveniente desde el acelerómetro (Fig. 3.5.a),
32
Capítulo 3 – Metodología
Figura 3.5.a: Señales temporales de fuerza y aceleración.
c) magnitud (o parte real) de la FRF (Fig. 3.5.b),
d) fase (o parte imaginaria) de la FRF (Fig 3.5.b) y
Figura 3.5.b: Magnitud y fase de FRF medida.
e) función de coherencia (Fig. 3.5.c).
Figura 3.5.c: Coherencia.
33
Capítulo 3 – Metodología
LabView ofrece opciones para la visualización del gráfico según las necesidades del
usuario. Permite, por ejemplo, utilizar escalas logarítmicas, realizar zoom, opción de
autoajuste, entre otros.
3.3.6. Selección de Display y Advertencias de Errores en Selección de Visualización
En el caso de realizar mediciones utilizando más de dos canales, el usuario podrá
visualizar la FRF y formas de onda que requiera durante el proceso de medición, mediante
la utilización de la sección Display. Si el usuario desea observar la forma de onda medida
en el acelerómetro ‘i’, la forma de onda proveniente del sensor de fuerza ‘j’, la FRF H ij y
finalmente la correspondiente función de coherencia, los pasos a seguir son:
a) Selección del acelerómetro y sensor de fuerza requeridos: Si se desea observar el
acelerómetro 1 y sensor de fuerza 1, debe ingresarse un 1 en la ventana
‘Acelerómetro’ y un 1 en la ventana ‘Sensor de Fuerza’. No debe ser ingresado el
número de canal.
b) Selección de modo de visualización de FRF: Puede visualizarse la Magnitud y Fase
de la FRF o la Parte Real e Imaginaria de ésta.
c) Verificación de errores: En caso de haber sido seleccionado un sensor o
acelerómetro no utilizado, se activará una advertencia.
Figura 3.6: Elección de canales, FRF y función de coherencia a visualizar.
3.3.7. Exportación de Datos a Matlab
La subfunción ‘Write to SpreadSheet File.vi’ (Fig. 3.7), permite exportar los datos
medidos en el formato especificado. Este formato se ha elegido de tal forma que los datos
exportados sean compatibles con Matlab.
34
Capítulo 3 – Metodología
Figura 3.7: Exportación de Datos a Matlab.
El uso de este comando activa un cuadro de diálogo en el cual el usuario determina
dónde los datos serán guardados. Primero, se guarda la coherencia y luego la FRF, cuya
primera fila corresponde a la magnitud y su segunda fila corresponde a la fase. Después de
haber sido almacenados los datos, el programa se detendrá.
Las entradas de esta subfunción son las siguientes:
a) ’2D data’ y ‘1D data’ corresponden a la información que se desea guardar. Si esta
información corresponde a números complejos, esta debe ser agrupada utilizando
algún cluster y luego ingresada a la subfunción en la entrada ‘2D data’. Si la
información corresponde sólo a números reales, ésta se agrupa utilizando un cluster
y se ingresa en la entrada ‘1D data’.
b) ‘format %.3f’ asigna el formato requerido por el usuario a los datos.
3.3.8. Diagrama de Flujo General
Por la gran cantidad de casos considerados en la programación, resulta más simple
visualizar el flujo de datos separando el algoritmo en secciones. Cada una de estas
secciones cumple una función principal. El contenido de estas secciones variará según la
cantidad de sensores y acelerómetros utilizados (Case N.S. y Case N.Ac. - Ver figura 3.8),
pero su función principal siempre será la misma.
Existen además conjuntos de entradas proporcionadas por el usuario que pueden ser
agrupadas según el uso que se les dé. A continuación se presenta el algoritmo simplificado
correspondiente al programa diseñado:
35
Capítulo 3 – Metodología
S8
S8
S7
S7
P.Vis.
N.Ac.
N.S.
LOOP
Case N.S.
Case N.Ac.
Exc
Ac
P.Ad.
S1
S1
Exc.
Ac.
Waveforms
S2
S2
S3
S3
Mag
Fase
Coh
Exc
Ac
S4
S4
Mag
Fase
Coh
S5
S5
C.a.Ut.
S6
S6
Window
Av.Par.
FRF Mode
Orden de
Exportar
Detener o Continuar
Orden de
Detención
Parámetros ingresados por el usuario
Secciones
Figura 3.8: Algoritmo resumido del programa.
Las secciones indicadas en la figura se describen a continuación:
-
-
Sección 1: Constituye el nexo de comunicación entre el programa y la tarjeta de
adquisición de datos (Punto 3.3.3).
Sección 2: Obtiene las formas de ondas correspondientes a cada canal (Punto 3.3.3).
Sección 3: Realiza el cálculo de la FRF y coherencia (Punto 3.3.4).
Sección 4: Selecciona las señales, FRF y coherencia a graficar, además de convertir
la FRF a parte real e imaginaria si el usuario lo requiere para la visualización (Punto
3.3.6).
Sección 5: Grafica las señales determinadas en la sección 4 (Punto 3.3.5).
Sección 6: Exporta datos y envía orden de detención o continuación del programa.
Esta continuación depende del Loop indicado en la figura 3.9.
Sección 7: Detecta posibles fallas en la configuración de los canales (Punto 3.3.2).
Sección 8: Detecta posibles fallas en instrucciones de visualización (Punto 3.3.6).
Los parámetros ingresados por el usuario se agrupan en:
36
Capítulo 3 – Metodología
-
Parámetros de adquisición (P.Ad.): Remitirse al punto 3.3.3.
Canales a Utilizar (C.a.Ut): Remitirse al punto 3.3.2.
Parámetros de visualización: Remitirse al punto 3.3.6.
Número de acelerómetros (N.Ac): Remitirse al punto 3.3.2.
Número de sensores de fuerza (N.S): Remitirse al punto 3.3.2.
Ventanas, parámetros de premediación y modo de FRF (Window, Av.Par., FRF
Mode): Remitirse al punto 3.3.4.
Orden de exportar: Remitirse al punto 3.3.7.
Orden de detención: Remitirse al punto 3.3.7.
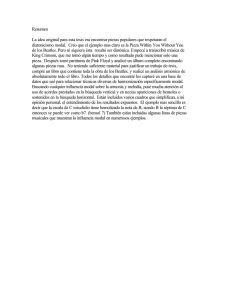
3.4. Procedimientos de Medición
3.4.1. Barra Empotrada-Libre
La primera estructura bajo estudio fue una barra de aluminio. Sus características
geométricas y estructurales se presentan en la siguiente tabla. La explicación sobre la
elección de estas dimensiones se realiza en el punto 4:
Largo
Ancho
Espesor
Volumen
40 cm.
2700 Kg/m3
Densidad
1,905 cm. Masa
61,722 gr
0,3 cm.
72 x 10 9 N/m2
Modulo de Young
22,86 cm3 Coeficiente de Poisson
0,34
Tabla 3.1: Características de barra bajo estudio.
La configuración utilizada para la excitación y medición de la respuesta de la barra se
aprecia en el siguiente diagrama:
Barra de Aluminio
Bloque de Cemento
Acondicionamiento de Señal
y Cálculos
10
9
8
6
5
4
3
2
1
7
Acelerómetro
Sensor de Fuerza
Shaker
Material Absorbente
Figura 3.9.a: Diagrama de configuración experimental utilizada para mediciones a barra.
37
Capítulo 3 – Metodología
Figura 3.9.b: Foto de configuración experimental utilizada para mediciones a barra.
Las mediciones se efectuaron excitando la barra mediante el shaker en su extremo libre
y por lo tanto midiendo siempre la fuerza aplicada en el punto 1. Las aceleraciones fueron
medidas en todos los puntos marcados en la figura 3.9.a. Las posiciones de cada punto se
dan a conocer en la siguiente tabla:
P1
P2
P3
P4
P5
P6
P7
P8
P9
P10
1 cm 5 cm 8 cm 11 cm 15 cm 21 cm 23 cm 27 cm 32 cm 37 cm
Tabla 3.2: Posiciones de los puntos de medición medidos a partir del extremo empotrado.
Los puntos no son equidistantes para disminuir la posibilidad de situar el acelerómetro
en más de un nodo, correspondiente a algún modo determinado.
La señal de excitación utilizada fue ruido blanco. Se decidió usar el acelerómetro PCB
352C22 después de realizar varias mediciones de prueba, utilizando un martillo de impacto
y el acelerómetro PCB 352C67. La configuración utilizada para la adquisición y
procesamiento de datos se resume en la siguiente tabla:
10 KHz
RMS
Frecuencia de muestreo
Modo de promediación
Lineal
Número de muestras por canal 20000
Modo de ponderación
Hanning Número de promediaciones 50
Ventana
H1
Modo de FRF
Tabla 3.3: Configuración utilizada para la adquisición y procesamiento de datos en barra).
38
Capítulo 3 – Metodología
Después de medir, la FRF y Coherencia fueron exportadas a Matlab, en donde se llevó a
cabo el método de extracción de peaks (sección 2.4.2). Los gráficos de los modos se
realizaron utilizando la interpolación tipo Splin Cúbico [25].
3.4.2. Placa Libre en sus Cuatro Bordes
Una placa libre en sus cuatro bordes fue la segunda estructura bajo estudio. Se realizó la
elección de esta estructura debido a que alcanzar las condiciones de borde descritas
anteriormente es, en la práctica, más simple. Sus características geométricas y estructurales
se presentan en la Tabla 3.4:
80 cm.
2700 Kg/m3
Largo
Densidad
80 cm.
3,456 Kg
Ancho
Masa
0,2 cm.
72 x 10 9 N/m2
Espesor
Modulo de Young
1280 cm3 Coeficiente de Poisson
0,34
Volumen
Tabla 3.4: Características de la placa bajo estudio.
Se requirió del diseño y construcción de una estructura metálica que permitiera
suspender la placa de tal forma que las condiciones de borde fuesen alcanzadas (Fig. 3.10.a,
Tabla 3.5). La placa se suspendió en sus 2 esquinas superiores mediante 2 cables elásticos
provenientes de la estructura. Cada uno de los elementos de esta estructura corresponde a
tubos de metal, rellenando con arena las partes p5, p6, p7, p8 y p15 para disminuir la
influencia de la estructura sobre los resultados de las mediciones.
P13
P14
P17
P15
P16
P10
P12
P11
150
P9
P6
P5
P1
P4
P3
30
35
P7
P8
P2
Figura 3.10.a: Estructura diseñada para la suspensión de la placa.
39
Capítulo 3 – Metodología
Elemento
Medida
Elemento
Medida
P1 P2 P3 P4 P5 P6 P7 P8 P9
110 110 65
65 153 153 155 155 110
P10 P11 P12 P13 P14 P15 P16 P17
110 33
33 110 80
81
80
81
Tabla 3.5: Diagrama de estructura soporta placa. Dimensiones en cm.
Figura 3.10.b: Foto de configuración experimental utilizada en mediciones a placa.
Las mediciones se realizaron excitando la placa en el punto 40 mediante el shaker
suspendido por hilos de nylon (Fig. 3.10.b), y capturando la respuesta de la placa en forma
de aceleraciones en 49 puntos equidistantes (Fig. 3.10.c).
40
Capítulo 3 – Metodología
7 cm
7 cm
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
Figura 3.10.c: Esquema de puntos de medición utilizados en placa.
La configuración utilizada para la adquisición y procesamiento de datos se resume en la
siguiente tabla:
2 KHz
RMS
Frecuencia de muestreo
Modo de premediación
Lineal
Número de muestras por canal 8000
Modo de ponderación
Hanning Número de premediaciones
50
Ventana
H1
Modo de FRF
Tabla 3.5: Configuración utilizada para la adquisición y procesamiento de datos en placa.
Al igual que en la barra, luego de medir, las FRF y Coherencias eran exportadas a
Matlab en donde se llevó a cabo el método de extracción de peaks. Los gráficos de los
modos se realizaron utilizando la interpolación tipo Splin Cúbico.
41
Capítulo 4 – Resultados y Análisis
4. RESULTADOS Y ANÁLISIS
4.1. Barra Empotrada Libre
4.1.1. Predicciones Teóricas
La ecuación diferencial que describe el comportamiento de las ondas de pliegue que se
transmiten a lo largo de una barra es [7,8]:
∂4
(v y ) = k 4 v y ,
∂x 4
(4.1)
en donde v y : Velocidad en la dirección ‘y’ (m / s) ; k = 4 m'
w ; número de onda de pliegue;
B
m' = m / L : Masa por unidad de longitud; ρ : Densidad del material (kg / m 3 ) ; L : Longitud de la
barra (m) ; B = EI : rigidez al pliegue (Nm 2 ) ; E : Módulo de elasticidad o módulo de Young
(N / m 2 ) ; I : momento de inercia (m 4 ) En el caso de una barra con sección transversal
rectangular de altura h y ancho b I = bh 3 / 12 (m 4 ) ; w : Frecuencia angular (rad / seg )
Si la barra se encuentra empotrada en x = 0 , se cumple que el desplazamiento y la velocidad
angular son nulos, es decir:
Y ( x ) x =0 = 0 ;
∂Y ( x)
∂x
=0
x =0
(4.2)
La condición libre en x = L implica que no existen momentos ni fuerzas de corte:
∂Y 2 ( x)
∂x 2
=0 ;
x=L
∂Y 3 ( x)
∂x 3
=0
(4.3)
x= L
Después de aplicar las condiciones de contorno (Ecs. 4.2 y 4.3) a la ecuación (4.1) y desarrollar
las expresiones resultantes [8], se obtiene la ecuación característica del sistema:
cos(kL ) cosh(kL) + 1 = 0
(4.4)
Las soluciones de la ecuación (4.4) determinan a las frecuencias naturales del sistema. Estas
soluciones han sido calculadas mediante un algoritmo programado en Matlab similar al método de
bisección [25]. Luego de probar distintas longitudes, considerando las dimensiones de las barras
disponibles en el mercado, e intentando obtener frecuencias naturales relativamente lejanas entre
sí, para así evaluar el sistema dentro de un amplio rango de frecuencias, se obtuvieron las
frecuencias naturales dadas en la tabla siguiente:
42
Capítulo 4 – Resultados y Análisis
Fn 1
15 Hz
Fn 2
98 Hz
Fn 3
274 Hz
Fn 4
537 Hz
Fn 5
889 Hz
Fn 6
1328 Hz
Fn 7
1854 Hz
Fn 8
2469 Hz
Fn 9
3172 Hz
Tabla 4.1: Frecuencias naturales de barra empotrada - libre obtenidas teóricamente.
A partir de la ecuación (4.1) y de las condiciones de borde expuestas en las ecuaciones (4.2) y
(4.3) puede determinarse una expresión que representa la forma de cada uno de los modos de
vibración de la barra [28]:
− cos(k n L) − cosh(k n L) Yn ( x) = C (cos(k n x) − cosh(k n x) ) +
(sin(k n x) − sinh(k n x ) ) (4.5)
sin(k n L) + sinh(k n L)
en donde la constante C es arbitraria [28] y k n corresponde a las soluciones de la ecuación (4.4).
A partir de la ecuación (4.5) se obtendrán las formas teóricas de modo, que serán analizadas en la
sección 4.2.3.
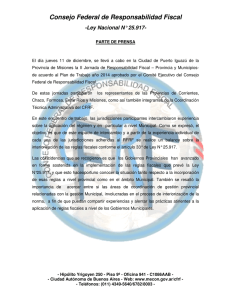
4.1.2. Resultados de Mediciones
La figura 4.1 muestra las magnitudes de las 10 FRF medidas en la barra:
Magnitudes FRF Barra
10
Mag
Mag
Mag
Mag
Mag
Mag
Mag
Mag
Mag
Mag
9
8
7
A/F
6
5
H 1-1
H 2-1
H 3-1
H 4-1
H 5-1
H 6-1
H 7-1
H 8-1
H 9-1
H 10-1
4
3
2
1
0
0
500
1000
1500
2000
2500
Hz
3000
3500
4000
4500
5000
Figura 4.1: Magnitudes FRF medidas en barra.
En la figura se observan claramente los peaks asociados a las frecuencias de resonancia
ubicadas entre los 0 y los 5000 Hz. Utilizando las amplitudes de los peaks observados en los
gráficos de las partes imaginarias de las 10 FRF medidas, se elaboró el cuadro resumen expuesto
43
Capítulo 4 – Resultados y Análisis
en la Tabla 4.2. A partir de los valores expuestos en esta tabla se aplicará el método de extracción
de peaks (sección 2.4.2). En el CD adjunto a esta tesis se encuentran claramente ordenados y
organizados todos los registros de mediciones y gráficos utilizados para la obtención de los
valores expresados a continuación.
Pos
P10
P9
P8
P7
P6
P5
P4
P3
P2
P1
Hij
Im 10-01
Im 09-01
Im 08-01
Im 07-01
Im 06-01
Im 05-01
Im 04-01
Im 03-01
Im 02-01
Im 01-01
Prom
Desv. Est.
Pos
P10
P9
P8
P7
P6
P5
P4
P3
P2
P1
FN1
17
17
17,8
17,8
17,8
18,5
18,3
19
19,3
19,8
18,2
0,9
Amp
-0,07
0,04
0,18
0,21
0,29
0,37
0,43
0,45
0,60
0,55
FN2
86
87
96,5
86
86,3
87
87,3
88
89
88,8
88,2
3,1
Amp
-0,08
-0,70
-1,14
-1,28
-1,26
-0,83
-0,19
0,43
0,96
1,44
Hij
FN6 Amp FN7
Im 10-01 1076 -4,3 1509
Im 09-01 1082 -2,29 1518
Im 08-01 1073 7,5
1516
Im 07-01 1085 -0,28 1509
Im 06-01 1075 -6,57 1515
Im 05-01 1082,5 1,76 1513
Im 04-01 1079 3,51 1510
Im 03-01 1082 -2,5 1518
Im 02-01 1076 -3,67 1510
Im 01-01 1080 3,24 1515
Prom
1079,1
1513,3
3,6
Desv. Est. 3,9
FN3
227
225
225
227
227,5
226
226
228
230
228,5
227
1,6
Amp FN4 Amp FN5 Amp
0,53
440 -1,50 724 3,56
2,74
434 -4,62 720 5,80
2,95
440 -1,25 724 -3,81
2,03
439 2,70 723 -4,01
0,56 435,8 4,91 726,5 -1,45
-2,09 440 1,13 718 5,29
-2,08 438 -3,17 729 -0,33
-1,20 437 -3,60 724 -4,38
0,30
440 -1,00 725 -2,75
2,27
439 3,32 724 3,47
438,3
723,8
2,1
3,1
Amp FN8 Amp FN9
4,7
1998 -7,12 2565
-1,23 2006 5,09 2567
-2,025 2009 -4,65 2570
3,02 2012,8 3,53 2578
2,32 2005 6,70 2583
-4,13 2002 -4,14 2591
4,27 2011 4,37 2588
0,5
2009 3,46 2571
-3,2
2008
-5
2585
4,51 2013 2,25 2586
2007,4
2578,4
4,8
9,5
Amp
6,32
-5,90
5,06
-4,39
-3,16
0,54
-1,09
4,81
-1,98
1,75
Tabla 4.2: Resumen de frecuencias y amplitudes de peaks observados en partes imaginarias de
FRF medidas en barra.
en donde:
Pos: Posición del acelerómetro;
Hij: función de transferencia obtenida mediante respuesta en i y excitación en j;
Im 10-01, …, Im 01-01: Parte imaginaria de H10-01,… , H01-01;
P1,..., P10: Posición 1, ……, Posición 10 (especificadas en Tabla 3.2);
FN1,…, FN9: Frecuencia Natural 1, … , Frecuencia Natural 9 (Hz);
Amp: Amplitud observada;
Prom: Frecuencia natural promedio para un modo específico;
Desv. Est: Desviación estándar del conjunto de frecuencias naturales detectadas para un
modo específico.
44
Capítulo 4 – Resultados y Análisis
La validez de la consideración de cada una de las frecuencias indicadas en la Tabla 4.2, se
discute a continuación.
4.1.3. Análisis y Comparación entre Predicciones Teóricas y Mediciones
Frecuencias Naturales
La comparación entre las frecuencias naturales calculadas teóricamente y las obtenidas
experimentalmente indica una notoria similitud en la distribución de éstas (Tabla 4.3).
FN 1
FN 2
FN 3
FN 4
FN 5
FN 6
FN 7
FN 8
FN 9
Teoría
15
98
274
537
889
1328
1854
2469
3172
(Hz)
Mediciones 18,2
88,2
227
438,3
723,8
1079,1 1513,3 2007,4
2578,4
(Hz)
21,3%
10,0%
17,2%
18,4%
18,6%
18,7%
18,4%
18,7%
18,7%
Error
Tabla 4.3: Comparación entre frecuencias naturales obtenidas teóricamente y a través de
mediciones a barra empotrada libre.
Se aprecia además, que los valores de error son bastante similares para todas las frecuencias.
Las variaciones en los valores de las constantes físicas del material provocarán un desplazamiento
de las frecuencias naturales del sistema, lo que puede verificarse mediante inspección directa de
los componentes de las ecuaciones (4.1) y (4.4). Esto permite inferir que los errores se deben a
considerar valores incorrectos en las constantes físicas del material.
Verificación de Fenómenos Asociados a las FRF
Al graficar en el mismo plano la parte real e imaginaria de una FRF, se observará que la parte
imaginaria alcanza un peak precisamente en la frecuencia de resonancia, mientras que la parte real
pasa de negativo a positivo encontrándose un cero precisamente en la frecuencia de resonancia
[3]. Los fenómenos mencionados pueden concluirse fácilmente al analizar la ecuación (2.7).
La verificación de estos fenómenos permitirá concluir que los peaks examinados corresponden
a ondas de pliegue.
En las siguientes figuras se expone la verificación de este fenómeno utilizando la FRF H11 .
Las partes imaginarias se grafican en color verde mientras que las partes reales se grafican en
color azul.
45
Capítulo 4 – Resultados y Análisis
Fre cue ncia de Re sona ncia 1 - 19.8 Hz
0.6
0.5
0.4
A/F
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
10
12
14
16
18
20
Hz
22
24
26
28
30
Figura 4.2.a: Parte imaginaria y parte real - primera frecuencia de resonancia.
Fre cue ncia de Re sona ncia 2 - 88.8 Hz
1.4
1.2
1
0.8
A/F
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
75
80
85
90
95
100
Hz
Figura 4.2.b: Parte imaginaria y parte real – segunda frecuencia de resonancia.
Fre cuencia de Re sona ncia 3 - 228.5 Hz
2
1.5
A/F
1
0.5
0
-0.5
-1
-1.5
210
215
220
225
230
235
240
245
Hz
Figura 4.2.c: Parte imaginaria y parte real – tercera frecuencia de resonancia.
46
Capítulo 4 – Resultados y Análisis
Fre cue ncia de Re sona ncia 4 - 439 Hz
3
2
A/F
1
0
-1
-2
420
425
430
435
440
Hz
445
450
455
Figura 4.2.d: Parte imaginaria y parte real – cuarta frecuencia de resonancia.
Fre cue ncia de Re sona ncia 5 - 724 Hz
3
2
A/F
1
0
-1
-2
710
715
720
725
Hz
730
735
Figura 4.2.e: Parte imaginaria y parte real – quinta frecuencia de resonancia.
Frecuencia de Re sona ncia 6 - 1080 Hz
3
2
A/F
1
0
-1
-2
1065
1070
1075
1080
Hz
1085
1090
1095
Figura 4.2.f: Parte imaginaria y parte real – sexta frecuencia de resonancia.
47
Capítulo 4 – Resultados y Análisis
Frecuencia de Re sona ncia 7 - 1515 Hz
4
3
A/F
2
1
0
-1
-2
1506
1508
1510
1512
1514
Hz
1516
1518
1520
1522
Figura 4.2.g: Parte imaginaria y parte real – séptima frecuencia de resonancia.
Frecuencia de Re sona ncia 8 - 2013 Hz
3
2
A/F
1
0
-1
-2
-3
2000
2005
2010
2015
2020
2025
Hz
Figura 4.2.h: Parte imaginaria y parte real – octava frecuencia de resonancia,
Frecuencia de Re sona ncia 9 - 2586 Hz
1.5
1
A/F
0.5
0
-0.5
-1
-1.5
2570
2575
2580
2585
Hz
2590
2595
2600
Figura 4.2.i: Parte imaginaria y parte real – novena frecuencia de resonancia.
48
Capítulo 4 – Resultados y Análisis
El fenómeno descrito con anterioridad se verifica aproximadamente en todas las frecuencias de
resonancia presentadas y puede ser verificado en todas las FRF medidas. Se debe mencionar que,
a medida que la frecuencia aumenta, la claridad y exactitud de este fenómeno disminuye.
Determinación y Verificación de Formas de Modo
Se ha calculado la forma de los modos utilizando la representación de FRF llamada receptancia
(Y (w) / F (w)) . Esta forma de FRF relaciona el desplazamiento con la fuerza aplicada y se obtiene
(
)
al dividir la acelerancia medida Y ( w) / F ( w) por − w 2 .
Los siguientes gráficos corresponden a las formas de los 9 primeros modos de vibración de la
barra obtenidas a partir de las columnas de la Tabla 4.2 (curva verde), utilizando el método de
extracción de peaks y el comando ‘spline’ de Matlab, el cual realiza interpolación tipo spline
cúbico (sección 2.4.2). Esta curva se compara con las predicciones teóricas realizadas, utilizando
la ecuación (4.5) (curva roja).
-5
Ac 352C22 - Re ce ptancia - H1 - Modo - 1 - 18.2 Hz
x 10
0
Y/F
-1
-2
-3
-4
-5
0
5
10
15
20
cm
25
30
35
40
Figura 4.2.a: Primer modo de vibración de barra empotrada libre – 18,2 Hz.
-6
x 10
Ac 352C22 - Re ce ptancia - H1 - Modo - 2 - 88.175 Hz
4
3
2
Y/F
1
0
-1
-2
-3
-4
0
5
10
15
20
cm
25
30
35
40
Figura 4.2.b: Segundo modo de vibración de barra empotrada libre – 88,2 Hz.
49
Capítulo 4 – Resultados y Análisis
-6
Ac 352C22 - Re cepta ncia - H1 - Modo - 3 - 227 Hz
x 10
1
0.5
Y/F
0
-0.5
-1
-1.5
0
5
10
15
20
cm
25
30
35
40
Figura 4.2.c: Tercer modo de vibración de barra empotrada libre – 227 Hz.
-7
x 10
Ac 352C22 - Rece ptancia - H1 - Modo - 4 - 438.275 Hz
6
4
Y/F
2
0
-2
-4
-6
0
5
10
15
20
cm
25
30
35
40
Figura 4.2.d: Cuarto modo de vibración de barra empotrada libre – 438,3 Hz.
-7
x 10
Ac 352C22 - Re ce ptancia - H1 - Modo - 5 - 723.75 Hz
2
1.5
1
0.5
Y/F
0
-0.5
-1
-1.5
-2
-2.5
-3
0
5
10
15
20
cm
25
30
35
40
Figura 4.2.e: Quinto modo de vibración de barra empotrada libre – 723,8 Hz.
50
Capítulo 4 – Resultados y Análisis
-7
x 10
Ac 352C22 - Rece ptancia - H1 - Modo - 6 - 1079.05 Hz
1.5
1
Y/F
0.5
0
-0.5
-1
-1.5
0
5
10
15
20
cm
25
30
35
40
Figura 4.2.f: Sexto modo de vibración de barra empotrada libre – 1079,1 Hz.
-8
x 10
Ac 352C22 - Re ce ptancia - H1 - Modo - 7 - 1513.3 Hz
6
4
2
Y/F
0
-2
-4
-6
-8
-10
0
5
10
15
20
cm
25
30
35
40
Figura 4.2.g: Séptimo modo de vibración de barra empotrada libre – 1513,3 Hz.
-8
x 10
Ac 352C22 - Rece ptancia - H1 - Modo - 8 - 2007.38 Hz
4
2
Y/F
0
-2
-4
-6
0
5
10
15
20
cm
25
30
35
40
Figura 4.2.h: Octavo modo de vibración de barra empotrada libre – 2007,4 Hz.
51
Capítulo 4 – Resultados y Análisis
-8
x 10
Ac 352C22 - Re ce ptancia - H1 - Modo - 9 - 2578.4 Hz
3
2
1
Y/F
0
-1
-2
-3
-4
0
5
10
15
20
cm
25
30
35
40
Figura 4.2.i: Noveno modo de vibración de barra empotrada libre – 2578,4 Hz.
La forma de modo obtenida para la primera frecuencia natural (Fig. 4.2.a), presenta una cierta
tendencia similar a la de las predicciones. Sin embargo, son notorias las irregularidades y
diferencias en comparación con la teoría.
En los modos 2, 3, 4 y 5 (Figs. 4.2.b, 4.2.c, 4.2.d, 4.2.e), se observa una importante similitud
entre las predicciones teóricas y las formas de modo obtenidas experimentalmente. En los modos
3, 4 y 5, los nodos coinciden plenamente con la teoría.
La similitud entre las mediciones y la teoría se mantiene para los modos 6, 7 y 8 (Figs. 4.2.f,
4.2.g, 4.2.h), pero las posiciones de los nodos no coinciden. Se comienzan a observar
irregularidades importantes en las amplitudes de los modos.
El noveno modo de vibración (Fig. 4.2.i) presenta una importante irregularidad entre los entre
los 15 y los 30 centímetros, además del desplazamiento del primer nodo.
Fuentes de Error
Algunas razones para el error obtenido en las mediciones pueden asociarse a fallas en la
implementación del experimento y a las características propias de los componentes de la cadena
de medición.
1) Incumplimiento de las condiciones de borde: Una de las razones para las diferencias
detectadas entre teoría y mediciones corresponde a que las condiciones de borde no fueron
plenamente alcanzadas. La masa finita del bloque de cemento provoca que las vibraciones
de la barra se transmitan a este y que por lo tanto la condición de desplazamiento cero no
se cumpla totalmente a pesar de la gran masa del bloque. En el caso del extremo libre, el
hecho de adosar el transductor de fuerza a la barra restringe el movimiento de esta a los
movimientos realizados por el shaker, lo que impide alcanzar la condición de libertad
deseada.
2) Influencia de la masa del acelerómetro: En la Tabla 4.2 se observan diferencias en las
frecuencias naturales observadas al variar de posición el acelerómetro PCB 352C22 (0,5
52
Capítulo 4 – Resultados y Análisis
gramos). En las mediciones de prueba realizadas con el acelerómetro PCB 352C67 (2
gramos) la desviación estándar fue mucho mayor (Tabla 4.4), lo que sugiere la influencia
de la masa del acelerómetro en las mediciones [1]:
Promedio
FN1 FN2 FN3 FN4 FN5 FN6
FN7
FN8
FN9 Masa Ac
Ac 352C22 18,2 88,2 227 438,3 723,8 1079,1 1513,3 2007,4 2578,4 0,5 gr
2 gr
Ac 352C67 17,8 84,4 221,7 430.,9 709,3 1058,9 1475,2 1966,0 2534,9
Desviación Estándar
FN1 FN2 FN3
1,6
Ac 352C22 0,9 3,1
3,8
Ac 352C67 0,46 3,5
FN4
2,1
5,9
FN5
3,1
6,8
FN6
3,9
8,8
FN7
3,6
13,7
FN8
4,8
27,2
FN9 Masa Ac
9,5
0,5 gr
104,2
2 gr
Tabla 4.4: Comparación entre frecuencias naturales promedio y desviaciones estándar
obtenidas mediante el acelerómetro PCB 352C22 y mediante mediciones de prueba realizadas
con el acelerómetro PCB 352C67.
3) Respuesta del hardware en bajas frecuencias: La pobre respuesta del amplificador y el
shaker en bajas frecuencias [21,23] constituye una razón para el error obtenido en la forma
de modo asociada a la primera frecuencia natural. Vale la pena mencionar que el uso del
ecualizador Behringer como filtro antialiasing, implica la activación automática de un
filtro pasa altos (Butterworth ,12 db/Oct), con frecuencia de corte mínima en 10 Hz. Las
características de este filtro pueden afectar el contenido de las señales captadas tanto por el
acelerómetro como por el sensor de fuerza, en frecuencias cercanas a los 10 Hz [22].
4.2. Placa Libre en sus Cuatro Bordes
4.2.1. Predicciones Teóricas
La ecuación diferencial que describe el comportamiento de ondas de pliegue que se propagan a
través de una placa que yace sobre el plano xz y con desplazamientos transversales η en la
dirección y es [7]:
∆∆η = k 4η ,
(4.7)
w 2 m' '
: número de onda de pliegue; m' ' = m / S : masa por unidad de superficie;
B'
E h3
2
: rigidez al pliegue de la
m : masa de la placa; S : superficie de la placa (m ) ; B ' =
1 − µ 2 12
en donde k = 4
placa (Nm 2 ); E : módulo de Young (N / m 2 ) ; µ :coeficiente de Poisson; h : espesor de la placa
(m) ; ∆ =
∂2
∂2
: operador de Laplace en dos dimensiones.
+
∂x 2 ∂z 2
53
Capítulo 4 – Resultados y Análisis
La ecuación (4.7) no puede ser resuelta analíticamente en el caso de las condiciones de borde
planteadas, por lo que la determinación tanto de las frecuencias naturales como de las formas de
modo se ha realizado mediante rutinas del método de elementos finitos [10]. Este modelo plantea
finalmente la ecuación (4.8) para la determinación de las frecuencias naturales del sistema:
f ij =
λij2
2πa 2
Eh 3
; i = 1,2,3,..... ; j = 1,2,3,.....
12m' ' 1 − µ 2
(
)
(4.8)
El parámetro λij depende de las condiciones de borde y de las dimensiones de la placa. En el
caso de una placa cuadrada de lado a y libre en sus cuatro bordes, este parámetro adquiere los
siguientes valores:
λij e (ij )
1
2
3
4
5
13,49 19,79 24,43 35,02 35,02
(2,2)
(1,3)
(3,1)
(3,2)
(2,3)
Tabla 4.6: Valor de parámetro λ ij correspondiente a los primeros seis modos de vibración (ij )
de una placa cuadrada libre en sus cuatro bordes. No se consideran los modos de cuerpo rígido
[10].
En la Tabla 4.6 se observa que los modos (3,2) y (2,3) comparten la misma frecuencia natural.
Esto se debe a que ambos modos son simétricos. Los modos (1,1), (1,2) y (2,1) corresponden a
modos de cuerpo rígido. Reemplazando los valores presentados en la Tabla 4.6 en la ecuación
(4.6) se obtienen las primeras cinco frecuencias naturales del sistema, sin considerar los modos de
cuerpo rígido:
1
2
3
4
5
143,5 308,8 470,5 966,9 966,9
(2,2)
(1,3)
(3,1)
(3,2)
(2,3)
Tabla 4.7: Primeras seis frecuencias naturales de placa libre en sus cuatro bordes obtenidas
teóricamente. No se consideran los modos de cuerpo rígido.
4.2.2. Resultados de Mediciones
La figura 4.3 corresponde a una superposición de las 49 FRF medidas en la placa:
54
Capítulo 4 – Resultados y Análisis
Magnitudes FRF Placa
8
7
6
A/F
5
4
3
2
1
0
0
100
200
300
400
500
Hz
600
700
800
900
1000
Figura 4.3: Magnitudes FRF medidas en placa.
Las mediciones realizadas en la placa no presentan la claridad y nitidez de las FRF obtenidas
en la barra (Fig. 4.1). Se utilizó el valor de los peaks observados en las partes imaginarias de las
49 FRF medidas para la elaboración de un cuadro resumen (Tabla 4.8). A partir de los valores
expuestos se aplicará el método de extracción de peaks. Los peaks seleccionados para la
elaboración de esta tabla son los que cumplen con el criterio de selección expuesto en la sección
4.1.2 (Verificación de fenómenos asociados a las FRF). En el CD adjunto a esta tesis se
encuentran claramente ordenados y organizados todos los registros de mediciones y gráficos
utilizados para la obtención de los valores expresados a continuación.
Pos
P1
P2
P3
P4
P5
P6
P7
P8
P9
P10
P11
P12
P13
P14
P15
P16
Hij
Im 01-40
Im 02-40
Im 03-40
Im 04-40
Im 05-40
Im 06-40
Im 07-40
Im 08-40
Im 09-40
Im 10-40
Im 11-40
Im 12-40
Im 13-40
Im 14-40
Im 15-40
Im 16-40
FO 1
82,3
82,3
82
82
82,3
82
82
81,8
82
82,3
82,2
82,2
82
82,2
82
82
Amp
-0,4
-0,15
0,22
0,3
0,1
0
0
0,05
0
-0,03
-0,05
-0,07
0
0,05
0,2
0,04
FO 2
121
113
121,3
121,5
121,5
121
121,5
121
121,5
121
121,5
121,5
121
121,5
121,5
121,5
Amp
0,56
-0,48
-0,5
0,3
0,48
0
-0,5
0
0,06
0
-0,05
-0,04
0
0,24
-0,5
0,06
FO 3
265
264,8
264,8
265
265
265,5
265,3
265,3
265,3
265
265,8
265
265,3
265
265,3
265,5
Amp
0,5
-0,35
1,1
-1,6
1
-0,3
1,1
0,6
-0,6
0
0,4
0,2
-0,68
0
-0,7
0,72
FO 4
346,3
346
345,8
346
346
346
346
346
346
346
345,8
346
346
346
346,3
346,3
Amp
0,4
0
1,62
-2,1
2
0,12
0
0,3
-0,2
-1,09
2
-1,44
0,05
0,2
-2,06
1,25
55
Capítulo 4 – Resultados y Análisis
Pos
P17
P18
P19
P20
P21
P22
P23
P24
P25
P26
P27
P28
P29
P30
P31
P32
P33
P34
P35
P36
P37
P38
P39
P40
P41
P42
P43
P44
P45
P46
P47
P48
P49
Hij
Im 17-40
Im 18-40
Im 19-40
Im 20-40
Im 21-40
Im 22-40
Im 23-40
Im 24-40
Im 25-40
Im 26-40
Im 27-40
Im 28-40
Im 29-40
Im 30-40
Im 31-40
Im 32-40
Im 33-40
Im 34-40
Im 35-40
Im 36-40
Im 37-40
Im 38-40
Im 39-40
Im 40-40
Im 41-40
Im 42-40
Im 43-40
Im 44-40
Im 45-40
Im 46-40
Im 47-40
Im 48-40
Im 49-40
Prom
Desv.Est
FO 1
82
82,2
82
82
82
82
82
82
82
82
82
82
82
82
82
82
82
82
81,8
82
82
82
82
82
82
82
82
82
82,3
82,3
82
82,3
82,3
82,1
0,2
Amp
-0,12
0,09
-0,04
0
0,01
0
0
0
0
0
0
0
-0,1
-0,05
0,05
0,1
0
0
-0,1
0
0
0
0
0
0
0
-0,2
0
0,12
0,14
0
-0,12
-0,1
FO 2
121,8
121,8
121,5
121
121,5
121,5
121
121,5
121
121,3
121,5
121,5
121,3
121
121,5
121
121,5
121
121,3
121,3
121
121
121
121
121
121
121
121
121
121
121
121
121
121,1
1,7
Amp
0,14
-0,1
-0,5
0
0,35
-0,14
0
0,08
0
0,04
-0,05
-0,15
0,4
0
-0,25
0
0,18
0
-0,22
0,25
0
0
0
0
0
0
0
0
0
0
0
0
0
FO 3
265
265
265
265,8
265
265,5
265
266
266
265
265
266
265
266,3
266,3
266,3
266,5
267
266
265
265
267,5
265
265
265
265
265
265
265
265
265
265
265
265,6
0,7
Amp
-0,3
0
0
0,8
0
-1,2
0
-0,5
0,9
0
0
-1,3
0
0,4
-0,5
0,5
-0,78
0,57
0
0
0
0,6
0
0
0
0
0
0
0
0
0
0
0
FO 4
346
346,3
346
346
345,8
346
346,8
346
346
346
346
346,5
346,5
346,5
346
347
346,5
347
346
346
346
347,3
347
347
347
347
346,8
346
347
347
346,8
346
346
346,4
0,5
Amp
0
-0,7
0
0,8
-1,8
2,2
-0,8
0
0
0
0
2
-1,7
0,6
0
-0,5
0,37
0,12
0
0
0
-0,4
0,6
-0,5
0,13
0,1
-0,6
0
0,4
-0,9
1,4
0
0
Tabla 4.8: Resumen de frecuencias y amplitudes de peaks observados en partes imaginarias de
FRF medidas en placa.
Pos
P1
P2
P3
P4
P5
P6
P7
P8
P9
P10
P11
P12
P13
Hij
Im 01-40
Im 02-40
Im 03-40
Im 04-40
Im 05-40
Im 06-40
Im 07-40
Im 08-40
Im 09-40
Im 10-40
Im 11-40
Im 12-40
Im 13-40
FO 5
353
353,3
356
356
353
353
352,8
356
353
356
356
356
353
Amp
1,4
-1,1
0
0
-1
0,8
-1,1
0
-0,06
0
0
0
0,4
FO 6
509,5
509,3
509,5
509,8
509,8
509,3
509,5
509,5
509,8
510,0
509,8
509,8
509,8
Amp
1,5
-2,04
1,03
0,53
-1,71
2,9
2,3
-1,4
0,67
-0,1
-0,34
1,2
-1,35
FO 7
712,5
712,3
713
712
713
713
712
713
712,3
713
712
712,5
712
Amp
1,6
1,7
0
-1,3
0
0
2,15
0
0,75
0
-0,8
-0,5
0,5
56
Capítulo 4 – Resultados y Análisis
Pos
P14
P15
P16
P17
P18
P19
P20
P21
P22
P23
P24
P25
P26
P27
P28
P29
P30
P31
P32
P33
P34
P35
P36
P37
P38
P39
P40
P41
P42
P43
P44
P45
P46
P47
P48
P49
Hij
Im 14-40
Im 15-40
Im 16-40
Im 17-40
Im 18-40
Im 19-40
Im 20-40
Im 21-40
Im 22-40
Im 23-40
Im 24-40
Im 25-40
Im 26-40
Im 27-40
Im 28-40
Im 29-40
Im 30-40
Im 31-40
Im 32-40
Im 33-40
Im 34-40
Im 35-40
Im 36-40
Im 37-40
Im 38-40
Im 39-40
Im 40-40
Im 41-40
Im 42-40
Im 43-40
Im 44-40
Im 45-40
Im 46-40
Im 47-40
Im 48-40
Im 49-40
Prom
Desv.Est
FO 5
353
353
353
356
356
353
356
356
352,8
356
356
356
356
354
354
354
354
354
354
354
354
354
356
356
356
356
356
354
353,8
353,8
353,8
356
353,5
353,8
353,5
356
353,5
0,5
Amp
-0,34
-0,55
0,3
0
0
0,3
0
0
-1,5
0
0
0
0
-1
1,2
-0,6
0,5
-0,2
-0,2
0,65
-0,85
1,2
0
0
0
0
0
0,25
-0,5
1
-0,6
0
0,5
-0,75
0,5
0
FO 6
509,3
509,8
509,8
511,0
510,0
510,0
510,0
509,8
510,0
511,3
511,0
511,0
511,3
511,3
511,0
511,3
511,0
511,0
511,0
511,0
511,0
511,0
511,0
511,5
511,5
511,5
511,5
511,5
511,5
511,8
511,5
511,5
511,0
511,5
511,5
511
510,6
0,8
Amp
2,56
0,8
-0,26
0
0,3
-1
1
-1,95
0,6
-0,4
0,3
-0,17
0,28
-0,35
0,6
-1,85
1,2
-0,5
0
0,4
0
0,8
2,2
-1,6
0,9
-0,25
-0,5
0,8
-1,5
-1
1,7
-1
0
0,5
-1,5
2
FO 7
713
712
713
712,5
712,5
712,5
712,5
712,3
712
714
713
714
713,5
713
713,5
713
714
714
714
714
713
713,5
713
714
713
714
713,5
713,8
713,5
713
713,5
713
713
713,5
713
713,5
713,0
0,8
Amp
0
-1
0
-0,2
0,8
0,6
-0,5
-1,2
-1,6
-1,8
0
0,9
1,7
0
-2
0
-0,5
-0,4
1
0,7
0
-1,3
0
0,6
0
-0,5
-0,4
0,3
0,8
1,6
0,6
0
-0,8
-0,8
0
1,2
Tabla 4.8: Resumen de frecuencias y amplitudes de peaks observados en partes imaginarias de
FRF medidas en placa.
en donde:
Pos: Posición del acelerómetro;
Hij: función de transferencia obtenida mediante respuesta en i y excitación en j;
Im 10-01, …, Im 01-01: Parte imaginaria de H10-01,… , H01-01;
P1,...,P10: Posición 1, ……, Posición 10 (especificadas en Tabla 3.2);
FO1,…, FO9: Frecuencia Observada 1, … , Frecuencia Observada 9 (Hz);
Amp: Amplitud observada;
Prom: Frecuencia natural promedio para un modo específico;
Desv. Est: Desviación estándar del conjunto de frecuencias naturales detectadas para un
modo específico.
57
Capítulo 4 – Resultados y Análisis
La validez de la consideración de cada una de las frecuencias indicadas en la Tabla 4.8 se
discute a continuación.
4.2.3. Análisis y Comparación entre Predicciones Teóricas y Mediciones
Frecuencias Naturales
No existe concordancia entre las predicciones expuestas en la Tabla 4.7 y las posibles
resonancias observadas. Mientras la teoría predice que dentro del rango de frecuencias estudiado
(0 Hz a 1 KHz) deben existir cinco modos de vibración no rígidos, las mediciones arrojan 7
posibles modos de vibración no rígidos (ver sección 4.2.3 – Determinación y verificación de
formas de modo).
Teoría
(Hz)
FN 1
FN 2
FN 3
FN 4
FN 5
143,5
308,8
470,5
966,9
966,9
FO 1 FO 2 FO 3 FO 4 FO 5 FO 6 FO 7
Mediciones
82,1 121,1 265,6 346,4 353,5 511,5 713,0
(Hz)
Tabla 4.9: Comparación entre frecuencias naturales obtenidas teóricamente y posibles
frecuencias naturales observadas en mediciones realizadas a placa.
Verificación de Fenómenos Asociados a las FRF
Las frecuencias seleccionadas son las que cumplen con el criterio expuesto en la sección 4.1.2
(Verificación de fenómenos asociados a las FRF). En las siguientes figuras se expone la
verificación de este fenómeno utilizando la FRF H1− 40 . Las partes imaginarias se grafican en
color verde mientras que las partes reales se grafican en color azul.
Frecuencia Observa da 1 - 82.3 Hz
0.4
0.3
0.2
A/F
0.1
0
-0.1
-0.2
-0.3
80
80.5
81
81.5
82
82.5
Hz
83
83.5
84
84.5
85
Figura 4.4.a: Parte imaginaria y parte real - primera posible frecuencia natural observada.
58
Capítulo 4 – Resultados y Análisis
Fre cue ncia Obse rvada 2 - 121 Hz
0.5
0.4
0.3
A/F
0.2
0.1
0
-0.1
-0.2
-0.3
118
119
120
121
Hz
122
123
124
Figura 4.4.b: Parte imaginaria y parte real - segunda posible frecuencia natural observada.
Fre cue ncia Obse rvada 3 - 265 Hz
0.5
0.4
A/F
0.3
0.2
0.1
0
-0.1
260
261
262
263
264
265
Hz
266
267
268
269
270
Figura 4.4.c: Parte imaginaria y parte real – tercera posible frecuencia natural observada.
Fre cue ncia Obse rvada 4 - 346.3 Hz
0.4
0.3
0.2
A/F
0.1
0
-0.1
-0.2
-0.3
343
344
345
346
Hz
347
348
349
Figura 4.4.d: Parte imaginaria y parte real – cuarta posible frecuencia natural observada.
59
Capítulo 4 – Resultados y Análisis
Fre cue ncia Obse rvada 5 - 353 Hz
1
A/F
0.5
0
-0.5
349
350
351
352
353
Hz
354
355
356
357
Figura 4.4.e: Parte imaginaria y parte real – quinta posible frecuencia natural observada.
Fre cue ncia Obse rvada 6 - 509.5 Hz
1.4
1.2
1
0.8
A/F
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
507
507.5
508
508.5
509
509.5
Hz
510
510.5
511
511.5
512
Figura 4.4.f: Parte imaginaria y parte real – sexta posible frecuencia natural observada.
Fre cue ncia Obse rvada 7 - 712.5 Hz
1.5
A/F
1
0.5
0
-0.5
709
710
711
712
713
714
715
716
Hz
Figura 4.4.g: Parte imaginaria y parte real – séptima posible frecuencia natural observada.
60
Capítulo 4 – Resultados y Análisis
Al observar las figuras 4.4, el fenómeno descrito con anterioridad se verifica aproximadamente
en todas las posibles frecuencias de resonancia observadas y puede ser observado en todas las
FRF medidas.
Determinación y Verificación de Formas de Modo
En la figura 4.5 se observan los primeros 5 modos de vibración (excluyendo modos de cuerpo
rígido) de una placa cuadrada y libre en sus cuatro bordes [9]. Estas formas de modo han sido
obtenidas experimentalmente por Waller, utilizando una placa de Chladni. A partir de los datos
obtenidos en las mediciones se ha calculado la forma de los modos utilizando la representación de
FRF llamada receptancia (Y ( w) / F ( w) ) .
Figura 4.5: Primeras cinco formas de modo de una placa cuadrada libre determinadas utilizando
una placa de Chladni [9].
Los siguientes gráficos (Figs. 4.6) corresponden a las formas de los 9 posibles primeros modos
de vibración de la placa obtenidas a partir de las columnas de la Tabla 4.9. Estos han sido
calculados utilizando el comando ‘interp2’ de Matlab, el cual incluye dentro de su código una
rutina de interpolación bicúbica [29]. Cada forma de modo se representa mediante un mapa de
colores (utilizando el comando ‘pcolor’ de Matlab), una representación tridimensional (utilizando
el comando ‘surf’ de Matlab) y un mapa en blanco y negro mediante en el cual las líneas nodales
detectadas se representan con el color negro. Esta última representación ha sido realizada
graficando el valor absoluto de las deformaciones medidas en la placa y luego variando el
contraste utilizando la herramienta ‘Interactive Colormap Shift’, incluido en Matlab.
61
Capítulo 4 – Resultados y Análisis
(i)
(ii)
(iii)
Figura 4.6.a: 82 Hz - Posible Forma de Modo 1; (i) Mapa de colores; (ii) Líneas nodales; (iii) Recreación
tridimensional.
62
Capítulo 4 – Resultados y Análisis
(i)
(ii)
(iii)
Figura 4.6.b: 121 Hz - Posible Forma de Modo 1; (i) Mapa de colores; (ii) Líneas nodales; (iii) Recreación
tridimensional.
63
Capítulo 4 – Resultados y Análisis
(i)
(ii)
(iii)
Figura 4.6.c: 267 Hz - Posible Forma de Modo 1; (i) Mapa de colores; (ii) Líneas nodales; (iii) Recreación
tridimensional.
64
Capítulo 4 – Resultados y Análisis
(i)
(ii)
(iii)
Figura 4.6.d: 346 Hz - Posible Forma de Modo 1; (i) Mapa de colores; (ii) Líneas nodales; (iii) Recreación
tridimensional.
65
Capítulo 4 – Resultados y Análisis
(i)
(ii)
(iii)
Figura 4.6.e: 354 Hz - Posible Forma de Modo 1; (i) Mapa de colores; (ii) Líneas nodales; (iii) Recreación
tridimensional.
66
Capítulo 4 – Resultados y Análisis
(i)
(ii)
(iii)
Figura 4.6.f: 511 Hz - Posible Forma de Modo 1; (i) Mapa de colores; (ii) Líneas nodales; (iii) Recreación
tridimensional.
67
Capítulo 4 – Resultados y Análisis
(i)
(ii)
(iii)
Figura 4.6.g: 713 Hz - Posible Forma de Modo 1; (i) Mapa de colores; (ii) Líneas nodales; (iii) Recreación
tridimensional.
68
Capítulo 4 – Resultados y Análisis
Ninguna de las posibles formas de modo obtenidas a partir de las mediciones efectuadas
coincide con las expuestas en la referencia [9] (Fig. 4.6). Se observan notorias disminuciones de
las amplitudes del borde inferior de la placa con respecto al superior, indicador de posibles errores
experimentales.
Existe tendencia a la simetría en todos los posibles modos expuestos. Esta puede verificarse
observando el mapa de colores o las respectivas líneas nodales. A continuación se realiza un breve
análisis de cada posible modo presentado:
82 Hz (Fig. 4.6.a): Se observa una tendencia a la simetría entre los cuatro bordes de la placa,
con amplitudes menores del borde inferior y el derecho con respecto al superior y al izquierdo
respectivamente. Existen anomalías en la parte central de la placa y casi nulo desplazamiento en
la esquina superior derecha.
121 Hz (Fig. 4.6.b): Existe simetría entre el lado derecho e izquierdo de la placa, además de un
desfase de 180º deducible por los colores observados en el mapa. El borde inferior presenta casi
nulo desplazamiento. Un análisis detallado del mapa de colores confirma la tendencia a la simetría
y al desfase en 180º. Se distinguen tres líneas nodales horizontales y tres líneas nodales
verticales.
267 Hz (Fig. 4.6.c): El mapa de colores indica simetría entre la mitad izquierda y derecha de la
placa. El borde inferior presenta en gran parte casi nulo desplazamiento.
346 Hz (Fig. 4.6.d): La mitad interior de la placa presenta desplazamientos menores en
relación a la mitad superior. A pesar de esto existe una clara simetría en el mapa de colores y
tendencia a la simetría en las líneas nodales.
354 Hz (Fig. 4.6.e): Existe simetría (especialmente visible en los bordes), interrumpida por la
presencia de una gran anomalía en la mitad derecha (color rojo).
511 Hz (Fig. 4.6.f): Presenta uno de los patrones modales con mejor definición. Se caracteriza
por la sucesión de máximos y mínimos en sentido diagonal.
713 Hz (Fig. 4.6.f): Es otro de los patrones modales que presentan mayor definición. Se
observan dos líneas nodales horizontales y dos verticales con presencia de mínimos en las cuatro
esquinas y en el centro, y máximos en los centros de los bordes.
Diferencias Experimentales y Fuentes de Error
A continuación se analizan las diferencias entre los montajes experimentales utilizados en el
presente trabajo y en la investigación realizada por Waller [9]. Además se identifican las
principales causas de errores propios de la experimentación:
1) Diferencias en montaje: Se advierte que el montaje utilizado en el experimento difiere en
gran manera del utilizado por Waller para la obtención de las líneas nodales presentadas
en la figura 4.5. La placa de Chladni utilizada consiste en una placa cuadrada unida en el
centro a una estructura de gran rigidez y masa, lo que impone una condición de nulo
69
Capítulo 4 – Resultados y Análisis
desplazamiento en el punto central que no se presenta en el montaje utilizado en este
trabajo. Esto puede constituir una de las causas de la gran diferencia entre las formas de
modo obtenidas y las formas de modo planteadas en [9].
2) Geometría de la placa: Se observa a través de una vista lateral, una leve curvatura en la
placa. Esta pequeña deformación provoca que la rigidez al pliegue de la estructura difiera
levemente del expresado en la ecuación (4.7), lo que finalmente se traducirá en inexactitud
en el cálculo de las frecuencias naturales.
3) Montaje del shaker:
a) Ángulo entre placa y shaker: A pesar de la minuciosidad con la cual se realizó el
montaje, siempre existirá la posibilidad de no lograr total perpendicularidad entre la
superficie de la placa y el sistema shaker - sensor de fuerza. Esto provocará que se
apliquen fuerzas indeseadas paralelas a la superficie de la placa y que la señal eléctrica
emitida por el sensor de fuerza no refleje debidamente la fuerza aplicada.
b) Resonancias propias del montaje: El tipo de montaje utilizado (sensor de fuerza
colgando) presenta menos efectividad en frecuencias bajas [1], ya que el movimiento de la
placa puede inducir movimientos indeseados en el shaker, lo que se traducirá en una
aceleración indeseada del sistema en general. Además, el montaje tipo péndulo del shaker
posee resonancias propias que se verán reflejadas en las mediciones.
.
70
Capítulo 5 – Conclusiones
5. CONCLUSIONES
5.1. Conclusiones Generales
1. Se ha diseñado e implementado exitosamente un sistema multicanal de medición de
FRF en base a la instrumentación disponible en el Instituto de Acústica de la Universidad
Austral de Chile. El algoritmo de procesamiento de datos, la interfaz gráfica y las
utilidades informáticas para el usuario han sido programados en LabView 6i.
2. Este sistema de medición puede ser perfectamente utilizado tanto para la realización
de investigaciones de carácter científico como para actividades pedagógicas.
3. Se ha planteado un método para la reconstrucción de patrones modales basado en la
medición de FRF y al método de extracción de peaks, que puede ser aplicado en
estructuras modelables mediante funciones de una variable (barra), o de dos variables
(placas).
5.2. Conclusiones Específicas
1. Se han reconstruido con éxito, a partir de las mediciones de FRF realizadas a una
barra empotrada – libre, mediante el sistema implementado y el método de extracción de
peaks, los nueve primeros modos de vibración de la estructura, observándose evidente
correspondencia con las predicciones teóricas, tanto en las formas de modo como en las
respectivas frecuencias naturales.
2. No ha sido posible corroborar el modelo planteado en la referencia [9] para el
cálculo de frecuencias naturales de placas cuadradas libres en sus cuatro bordes. Las
mediciones a la placa han arrojado FRF con un patrón complejo, que no permite asegurar
que las formas de modo obtenidas correspondan a ondas de pliegue, a pesar de la
verificación de los fenómenos asociados a este tipo de ondas en cada una de las 49 FRF
medidas. Esta ‘no correspondencia’ se asocia principalmente a las diferencias entre el
montaje realizado en el presente trabajo con el montaje utilizado por Waller en sus
ensayos. A pesar de esto, se ha podido reconstruir en base a las mediciones realizadas y al
método de extracción de peaks, posibles formas de modo que presentan una clara
tendencia a la simetría, especialmente en las formas de modo obtenidas en los 511 Hz y
en los 713 Hz.
3. En el caso de la realización de un alto número de mediciones y del análisis de un
elevado número de posibles frecuencias naturales, el método de extracción de peaks
posee limitaciones prácticas en cuanto al tiempo requerido, tanto para llevar a cabo la
inspección de todas las FRF medidas, como para corroborar los fenómenos requeridos
para asociar los peaks observados a ondas de pliegue.
71
6. REFERENCIAS BIBLIOGRÁFICAS
[1]
Ewins, D.J. ‘Modal Testing: Theory and Practice’, Research Studies Press LTD. for
Brüel & Kjaer, 1986
[2]
Coleman, R. ‘Experimental Structural Dynamics’, AuthorHouse, April 2004.
[3]
Gutiérrez, C. ‘Investigación del Método de Fracción Racional Polinómica para la
extracción de parámetros modales a través de la técnica de impacto’. Tesis presentada
para optar al grado de Licenciado en Acústica y al título de Ingeniero Acústico,
Universidad Austral de Chile, 2002.
[4]
Inman, D.J. ‘Vibration’, Prentice Hall, 1989,
[5]
Avitabile, P. ‘Experimental Modal Analysis – A Simple NonMathematical
Presentation’, Sound and Vibration. January 2001.
[6]
Harris, C.M., Piersol, A.G. ‘Shock and Vibration Handbook’, McGrawHill, 2002.
[7]
Cremer, L., Heckl, M. ‘Structure Borne Sound’, Springer-Verlag, 1988.
[8]
Meirovitch, L. ‘Fundamentals of Vibrations’, McGraw-Hill, International Edition
2001.
[9]
Blevins, R. ‘Formulas for Natural Frequency and Mode Shape’, Krieger Publishing
Company, 2001.
[10] Leissa, A.W. ‘Vibration of Plates’, Scientific and Technical Information Division,
Office of Technology Utilization, National Aeronautics and Space Administration,
1969.
[11] Jurado, C. ‘Estudio Experimental de la Impedancia Acústica en Conductos y
Silenciadores bajo Diferentes Condiciones de Borde’, Tesis presentada para optar al
grado de Licenciado en Acústica y al título de Ingeniero Acústico, Universidad
Austral de Chile, 2004.
[12] Arenas, J.P. ‘Apuntes de la Asignatura Control de Vibraciones’, Universidad Austral
de Chile, 2005.
[13] D∅ssing, O. ‘Structural Testing Part 1: Mechanical Mobility Measurements’, Brüel
& Kjaer Technical Review, March 1988.
[14] D∅ssing, O. ‘Structural Testing Part 2: Modal Analysis and Simulations’, Brüel &
Kjaer Technical Review, March 1988.
72
[15] Zaveri, K., Phil, M. ‘Modal Analysis of Large Structures – Multiple Exciter
Systems’, Brüel & Kjaer Technical Review, April 1985.
[16] Agilent Technologies ‘The Fundamentals of Modal Testing’, Aplication Note 243 –
3, 1997.
[17] Petterson, B.A.T. ‘Compendium of Structural Acoustics’, Technische Universität
Berlin, 2005.
[18] Shabana, A.A. ‘Vibration of Discrete and Continuous Systems’, Springer, 1996.
[19] PCB Piezotronics – Vibration Division, ‘Model 352C67 – ICP® Accelerometer –
Installation and Operating Manual’, Manual Number 18292, 2002.
[20] Oppenheim, A., Schafer, R. ‘Tratamiento de Señales en Tiempo Discreto’, Prentice
Hall, 2000.
[21] Bruel & Kjaer, ‘Product Data – Mini Shaker Type 4810’.
[22] Behringer® ‘Ultragraph Pro FBQ 6200 – Technical Specifications’, Version 1.1,
2003.
[23] Samson Audio ‘Servo 260 Power Amplifier – Specification Sheet’, 1998.
[24] Freund, J.E., Miller, I., Miller, M. ‘Estadística Matemática con Aplicaciones’,
Prentice Hall, 1999.
[25] Mathews, J., Fink, K. ‘Métodos Numéricos con Matlab’, Prentice Hall, 1999.
[26] Mendes, N.M. ‘Extraction of Valid Modal Properties from Measurements Data in
Structural Vibrations’, Thesis submitted to the University of London, Londres, 1998.
[27] PCB Piezotronics – Vibration Division, ‘Model 352C22 – ICP® Accelerometer –
Specification Sheet’, Specification Number 10668, 2002.
[28] Voltera, E., Zachmanoglou, E. C. ‘Dynamics of Vibrations’, Charles E. Merrill Books
Inc., 1965.
[29] Spath, H. ‘Two Dimensional Spline Interpolation Algortihms’, A.K. Peters Ltd.,
1995.
73