Capítulo 1 El sistema radar atmosférico de la Universidad de Piura1
Anuncio

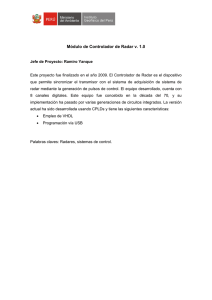
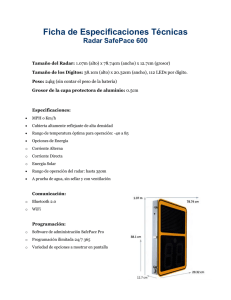
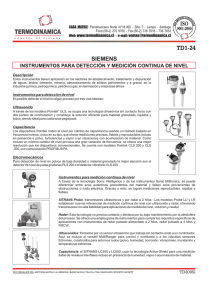
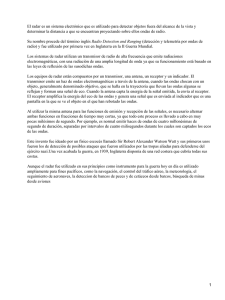
3 Capítulo 1 El sistema radar atmosférico de la Universidad de Piura1 1.1 Introducción El radar atmosférico ST (Estratósfera – Tropósfera) de 50 MHz de Piura fue construido en los primeros meses de 1989 gracias al proyecto “Trans-Pacific Profiler Network”, (TPPN) entre el Laboratorio Aeronómico de la “National Oceanic and Atmospheric Administration” (NOAA) en cooperación con el “Cooperative Institute for Research in Environmental Sciences” (CIRES) de la Universidad de Colorado, ambas en Boulder, Colorado (USA). Para la instalación del radar de Piura tuvieron participación dos instituciones peruanas, el Instituto Geofísico del Perú (IGP) y la Universidad de Piura (UDEP). Este radar perfilador de vientos comenzó a operar en mayo de 1989 como parte la Red Transpacífica de Perfiladores, TPPN (Figura 1.1), para el monitoreo de la dinámica atmosférica a lo largo del Océano Pacifico Ecuatorial. Éste fue un programa de investigación conjunta entre el Laboratorio Aeronómico de la NOAA y la Universidad de Colorado. El principal propósito del radar ST de Piura es el estudio de la dinámica de la baja atmósfera en la región ubicada al extremo este de dicha red de radares, sobre la costa norte del Perú (05° S, 80° W). Ésta es el área más occidental de Sudamérica y una de las 1 El contenido de este capítulo se basó en: Rodolfo Rodríguez – José León Butrón “Manuales de los Sistemas del Radar Atmosférico de la Estación Udep” 4 regiones continentales más afectadas por las anomalías climáticas debidas al fenómeno “El Niño – Oscilación Sur” (ENOS). Figura 1.1. Ubicación del radar ST de Piura en el Pacifico Ecuatorial como parte de la Red Traspacífica de Perfiladores (TPPN). El radar ST de Piura está ubicado dentro del campus de la UDEP y sus coordenadas geográficas son: • • • Latitud Longitud Altitud 05° 09’ 57’’ sur 80° 38’ 18’’ oeste 40 msnm Figura 1.2. Vista panorámica de la antena del Radar ST de la Universidad de Piura. 5 1.2 Descripción del radar ST de Piura. El radar atmosférico de la Universidad de Piura es un radar “perfilador de vientos” que opera en la banda VHF a una frecuencia nominal de 49.92 MHz. Con este radar se observa la dinámica de la atmósfera, midiendo las tres componentes del viento (vertical y horizontal en las direcciones Norte – Sur y Este – Oeste). Se le denomina perfilador de vientos porque con él se obtiene un perfil de las tres componentes del viento en un rango de entre 2 a 20 Km. de altura. Para cumplir esta función emplea una antena altamente directiva pues el ángulo del haz es de casi 2.5 grados. También se le denomina “Radar ST” (siglas en inglés) porque el perfil de vientos que se obtiene con este radar corresponde a alturas de la estratósfera y la tropósfera. 1.3 Esquema y partes del sistema radar El radar ST es un sistema de detección mono estático, pues utiliza la misma antena para la transmisión y la recepción. Como en todo sistema radar, el perfilador de vientos ST de Piura está conformado por los sistemas de Antenas, de Transmisión, de Recepción y de Procesamiento de Señales y Datos. Figura 1.3. Diagrama de bloques del radar de Piura A continuación se describe cada una de estas partes. 6 1.3.1 Sistema de Antena La antena del radar ST de Piura es un complejo de antenas que ocupa un área de 10 000 m2 (100 m x 100 m) y está conformada por dos arreglos de 32 antenas cada uno, superpuestos ortogonalmente. Cada una de estas antenas a su vez, están compuesta de 48 elementos de cable coaxial de media longitud de onda que conforman una línea. Un arreglo está orientado en la dirección Norte-Sur y el otro arreglo en la dirección Este-Oeste, de tal forma que conforman una especie de malla como se puede apreciar en la figura 1.4. Figura 1.4. Disposición del radar Figura 1.5. Plano del Radar 7 Este complejo de antenas tiene, por tanto, 64 puntos de alimentación como se puede apreciar en la figura 1.5, de los cuales 32 puntos alineados de Norte a Sur alimentan a las antenas tendidas en dirección Este-Oeste y los otros 32 puntos alineados de Este a Oeste alimentan a las antenas tendidas de Norte a Sur. Con este complejo de antenas se puede emitir la radiación en cinco direcciones: 1 vertical y 4 oblicuas hacia los cuatro puntos cardinales. La dirección vertical se consigue haciendo que la longitud del cableado de alimentación de todas las antenas de un arreglo, sea igual para todas ellas desde el transmisor. La dirección oblicua se consigue alimentando a antenas sucesivas con un cierto desfase, lo cual se logra haciendo que la longitud del cableado de alimentación de las antenas sea una fracción de longitud de onda mayor o menor. En la figura 1.6 observamos que cada punto de alimentación esta conectado a 24 tramos de cable coaxial por lado, así con cada uno de los puntos de alimentación se forma una fila; por lo tanto se tendrá un arreglo de 32 filas y 32 columnas. La finalidad de esta disposición de los tramos de cable coaxial es definir un adecuado patrón de radiación. Figura 1.6. Conexión de los elementos de antena (Cada antena tiene 48 elementos, 24 a cada lado del punto de alimentación) Cada antena está confeccionada por 48 tramos de cable coaxial RG8 dispuestos colinealmente y de longitud igual a λ/2 (λ=longitud de onda en metros) cada uno. Es por esto que a este tipo de antenas se les denomina COCO (Colineal – Coaxial). Cada una de estas antenas COCO se alimenta en su punto medio y tiene una impedancia de entrada igual a 50 Ω. Además se conecta un condensador de 75 pF en el punto de alimentación de la antena para compensar la componente inductiva. La emisión del rayo de energía radio eléctrica por la antena en dirección del beam vertical se utiliza para medir los vientos verticales en las capas bajas de la atmósfera y para el estudio de la capa E de la ionósfera. En dirección oblicua hacia el beam norte, sur, este y oeste con 15 grados de azimut (respecto a la vertical), también con un ancho de apertura de casi 2.5 grados, se emplea para la medición de vientos horizontales. 8 Figura 1.7. Direcciones del haz del Radar La selección de una de las 5 direcciones de transmisión es realizada por la unidad de control que gobierna a un conjunto de relays de potencia (denominados también caja de conmutación) que controlan a su vez el desfase que debe tener cada una de las antenas por donde se envía el pulso de radio frecuencia (RF) generado por el transmisor. La señal de control proviene del controlador del radar. La dirección de transmisión es cambiada aproximadamente cada 2 minutos. Como se aprecia en la figura 1.8, se utiliza uno de los dos arreglos de antena por vez para la transmisión del rayo de RF. El primer arreglo lo hace en dirección vertical y también, con el desfase en dirección norte y sur; el otro arreglo ortogonal lo hace también en dirección vertical y en la dirección este y oeste. Figura 1.8. Secuencia de transmisión. 9 Para transmitir en una dirección oblicua se alimentan a los elementos con un retardo de fase que se incrementa linealmente en una de las direcciones del arreglo. Dicho incremento es progresivo pasando de una fila de elementos a la siguiente. El ángulo de deflexión del haz depende del retardo de fase introducido. El radar de la Universidad de Piura utiliza esta técnica para transmitir con una inclinación de 15˚ respecto a la vertical. Así se puede enviar la señal de RF a la dirección deseada de manera electrónica. Figura 1.9. Generación del desfase El desfase introducido es el que causa una emisión oblicua de la señal de RF, que para el radar de Piura está determinada en unos 15 grados respecto de la vertical como se aprecia en la figura 1.10. Figura 1.10. Detalle de transmisión inclinada. 1.3.2 Sistema de Transmisión / Recepción2 El diseño de este transmisor está basado en los transmisores utilizados originalmente en el radar MST Poker Flat desde la década de 1970. El transmisor fue diseñado por el 2 Paul E. Johnston – Alvin M. Gray, “Transmitter Power Amplifier Manuals” 10 laboratorio de aeronomía del NOOA en Boulder, Colorado (USA) pero ha sido modificado y actualizado en algunos de sus componentes. Este no es sólo un transmisor de RF sino que a la vez es también un amplificador de potencia. El transmisor del radar tiene una potencia pico de 40 Kw., tiene cuatro etapas de amplificación y es alimentado por una fuente externa. En el transmisor la impedancia característica es de 50 Ω y la del cable coaxial que alimenta a las antenas es de 100 Ω, por lo que se necesita un transformador de ¼ de onda y para ello se usó un cable coaxial de 75 Ω. La figura 1.11 muestra una disposición esquemática de la conexión. Figura 1.11. Conexión del Transmisor y el cable coaxial La apariencia externa del transmisor se puede apreciar en la figura 1.12. El transmisor consta de las siguientes etapas o partes: - 1 etapa de amplificación de baja tensión. 3 etapas de amplificación de alta tensión. Un conmutador TR – ATR. Un acoplamiento direccional. Circuitos de inhabilitación de pulso de RF controlado por el alto voltaje, la presión de ventilación y la temperatura ambiente. El transmisor está alimentado por un pulso de RF de 50 MHz, a baja potencia. Este pulso es recibido primero por un circuito que impide el paso de la señal de RF si es que la presión de ventilación es baja, si es que existe una falta de alto voltaje o si es que la temperatura ambiental es elevada. Si es que se cumple con todas las condiciones mencionadas anteriormente, la señal pasa al amplificador de baja tensión. Luego la señal es amplificada por tres amplificadores de alta tensión de manera consecutiva, logrando obtener a la salida del último amplificador una señal lista para ser emitida, por la antena, hacia la atmósfera. 11 Figura 1.12. Transmisor 1.3.3 1.3.3.1 Sistema de Procesamiento de las señales Unidad de TX – RX (Controlador del radar) La unidad de TX – RX genera todas las señales para el funcionamiento del radar. El pulso de RF de acuerdo a los parámetros de funcionamiento del sistema como son el ancho de pulso (PW) y el período entre pulsos (IPP). También se generan los pulsos de control para indicar en que instante transmite y en que momento recibe el sistema. Aquí además, se origina la señal de RF, la señal TR y se recibe la señal TX proveniente del transmisor. La señal TR conmuta a los dispositivos electrónicos entre la transmisión y la recepción de la señal. La señal TX es la encargada de indicar el momento de la transmisión y gobierna la duración del pulso. La señal RF es la señal de radiofrecuencia de 49.92 MHz que será enviada a la atmósfera. Los pulsos de muestreo (S) comandan la lectura de datos de la señal recibida (RX) cada cierto período dentro del tiempo que dura la recepción. El controlador del radar cumple la función de temporizador, de aquí proviene la señal que sincroniza la transmisión del pulso de RF. Los pulsos tienen una potencia pico de 40 KW y tienen una duración de 6,7 µs a intervalos de 1 ms. La frecuencia específica de trabajo es de 49.92 MHz. 1.3.3.2 Unidad de interfase del radar La unidad de interfase del radar es la encargada de convertir la señal analógica después del receptor en una señal digital que luego es enviada a la computadora para su procesamiento. Además genera también las señales digitales correspondientes para el cambio de dirección del rayo de la antena mediante el conmutador de antena. 12 1.4 Parámetros de funcionamiento del radar ST de Piura3 A continuación se presentan los principales datos del radar ST de Piura Antena Dimensiones de la Antena Tipo de Antena 100 m x 100 m COCO Transmisión / Recepción Frecuencia Longitud de onda Período entre pulsos Ancho de pulso Potencia Pico del Transmisor Ganancia de la antena Ancho del Beam a la mitad de potencia de la antena Campo lejano de la antena Dirección del Beam Este Dirección del Beam Sur Alcance en modo vertical Alcance en modo oblicuo 1.5 49.920 MHz ≈6m 1 ms ≈ 6.7 µs 40 Kw. 35.5 dB 3.4° 1.7 Km. 15° al este de la vertical 15° al sur de la vertical 1.7 a 20 Km. 1.7 a 10 Km. Principio de funcionamiento de los radares MST4 El radar de Piura utiliza ondas electromagnéticas para poder medir los perfiles de vientos de la atmósfera, pero estas ondas electromagnéticas sufren ciertos fenómenos (refracción, reflexión y absorción) al momento que son enviadas a la atmósfera. Estos fenómenos junto con el principio del efecto Doppler rigen el comportamiento del radar, ya que las mediciones que se hacen se basan en la interacción de la onda enviada con la atmósfera. 1.5.1 Ondas electromagnéticas Las ondas electromagnéticas abarcan una amplia gama de diferentes clases de radiaciones provenientes de una variedad de fuentes. Si bien estas radiaciones difieren en gran manera en cuanto a sus propiedades, sus medios de producción, y las maneras en que las observamos, comparten otras características en común: todas pueden describirse en términos de campos eléctricos y magnéticos, y todas viajan a través del vacío con la misma velocidad (la velocidad de la luz). De hecho, desde el punto de vista fundamental, difieren sólo en la longitud de onda o en la frecuencia.5 3 Luis Enrique Liziola, “Studies of Cuasi Horizontally Propagating Gravity Waves in the Troposphere using the Piura ST Wind Profiler” 4 Simon Kingsley - Shaun Quegan, “Understanding Radar Systems” 5 Halliday, Resnick, Krane; "Física Vol. 2" 13 Figura 1.13. Espectro electromagnético y sus componentes Las ondas electromagnéticas pueden interactuar con el medio a través del cual viajan debido a que los átomos y moléculas que lo componen pueden absorber, dispersar o refractar las ondas de acuerdo a su longitud. La atmósfera absorbe las ondas electromagnéticas a partir del espectro ultravioleta hacia abajo, muchas de las longitudes entre el infrarrojo y microondas, y muchas de las ondas largas de radio. La ventana de radio que deja la atmósfera permite el paso de ondas entre 5 MHz a 300 GHz (100 m a 1 mm de longitud de onda). Las ondas de radio frecuencia así como parte de las ondas electromagnéticas, tienen muchas propiedades, como la absorción, reflexión, refracción, etc. o Absorción y Emisión: Cuando las ondas de radiación pasan a través de un gas los átomos o moléculas que lo componen pueden absorber parte de esta energía. Cada átomo o molécula absorbe una longitud de onda específica. o Reflexión: Así como las ondas del espectro visible son reflejadas por superficies como el agua o los espejos, las ondas de radio también pueden ser reflejadas. El principio de reflexión es el que ha permitido el diseño y construcción de antenas parabólicas que reflejan y concentran la luz en un solo punto para que pueda ser captado por un receptor. 14 o Refracción: Es la desviación de las ondas cuando ellas pasan a través de un medio. Las diferentes sustancias y medios tienen diferentes índices de refracción. Por ejemplo en el vacío es 1 y en el agua es 1.3. o Fase: Se dice que dos ondas están en fase cuando sus picos y valles coinciden. o Interferencia: Existen dos tipos de interferencias. Cuando dos ondas de la misma frecuencia y dirección se encuentran, la onda resultante será la suma de ambas; a esto se le denomina Interferencia Constructiva. Cuando dos ondas tienen la misma amplitud y tienen un desfase de 180 grados (es decir el pico de una coincide con el valle de otra) las dos ondas se cancelan; a esto se le denomina Interferencia Destructiva. o Difracción: Cuando una onda electromagnética pasa por un obstáculo en el espacio, la onda es desviada alrededor del objeto. o Cintilación: Cuando una onda electromagnética viaja a través del medio se ve sometida a pasar por áreas que varían en presión, temperatura, densidad, etc.; esto trae como consecuencia que desde el punto de observación parecerá que las ondas varían en intensidad, por tanto el efecto visual de esto es que las estrellas titilen o se vean espejismos en las tierras muy secas. Este mismo fenómeno ocurre con todas las ondas del espectro. Figura 1.14. Reflexión, refracción y absorción de una onda electromagnética 15 Figura 1.15. Interrelación de ondas EM con la atmósfera. 1.5.2 Efecto Doppler Los radares tienen su principio básico en leyes físicas, tales como la reflexión de las ondas y el efecto Doppler. El efecto Doppler consiste en el cambio que se produce en la frecuencia de una onda en general debida al movimiento relativo entre la fuente y el cuerpo que las recibe (observador). En este caso el radar hace de fuente y de observador. El radar recibe ecos provenientes de la atmósfera debido a la interacción de la radiación con ésta. Estos ecos son debidos principalmente a vientos, gotas de agua, etc.; y a los diferentes índices de refracción y reflexión que existen a diferentes alturas, ya que la velocidad de las ondas de radiofrecuencia se ven afectadas por dichos fenómenos. Figura 1.16. Esquema explicativo del Efecto Doppler 16 Figura 1.17. Esquema de la emisión de la RF con una antena de radar MST 1.6 Ecuación de Friis (o de Transmisión)6 Para deducir la ecuación del radar es conveniente, primero, entender la ecuación de Transmisión (o Ecuación de Friis). A continuación se explican ambas ecuaciones. Figura 1.18. Esquema de transmisión y recepción de data entre dos antenas Dadas dos antenas, una para transmisión (Tx) y otra para recepción (Rx) de datos, separadas una distancia r ; deduciremos cuál es el valor de la potencia PR que es recibida por la antena de recepción. Además podemos decir que la potencia de transmisión y las ganancias de las antenas de recepción y de transmisión son valores conocidos. Es decir en la antena de transmisión la potencia transmitida estará definida por PT y su ganancia será GTX , mientras que en la antena de recepción la ganancia será G RX . 6 Rodolfo Rodríguez, “Apuntes de: ‘Sistemas de Comunicación Avanzada’” 17 En el transmisor, ubicado a una distancia r del receptor, la densidad de potencia promedio ρ av es: ρ av = PT G TX 4π r 2 (1.1) El área efectiva en la recepción Ae RX es posible hallarla mediante la siguiente relación: Ae RX = PR ρ av (1.2) Despejando PR : PR = AeRX ⋅ ρ av (1.3) De la ecuación 1.1 despejamos PT y obtenemos: 4πr 2 PT = ρ av GTX (1.4) Dividiendo la ecuación 1.3 entre la ecuación 1.4 y despejando PR : PR = PT ⋅ AeRX ⋅ GTX 4πr 2 (1.5) Además, el área efectiva Ae y la ganancia directiva G D en una antena están relacionadas por la siguiente ecuación: λ.2 Ae = GD 4π (1.6) Donde: λ = longitud de onda Entonces, en el transmisor el área efectiva será: AeTX λ2 = GTX 4π (1.7) 18 De la ecuación anterior despejamos la ganancia del transmisor: GTX = 4π AeTX λ2 (1.8) Ahora, reemplazamos la ecuación 1.8 en la ecuación 1.5 y obtenemos: PR = PT ⋅ AeRX ⋅ AeTX r 2 λ2 (1.9) La fórmula anterior es la Fórmula de Friis y está expresada en función de las áreas efectivas, pero podemos también expresarla en función de las ganancias del transmisor y del receptor. Para esto combinamos las ecuaciones 1.6 y 1.9 y obtenemos: PR = PT ⋅ GRX ⋅ GTX ⋅ λ2 ( 4πr )2 (1.10) A lo largo de toda esta deducción no hemos considerado la existencia de pérdidas en la transmisión pero podemos considerar un factor “L” o factor de pérdidas que englobe todos los tipos de pérdidas existentes. Es decir la potencia real del receptor considerando las pérdidas será: PT ⋅ GRX ⋅ GTX ⋅ λ2 PR = ⋅L ( 4πr )2 PR = PT ⋅ AeRX ⋅ AeTX ⋅L r 2 λ2 (1.11) (1.12) Debemos notar que la potencia de recepción es inversamente proporcional al cuadrado de la distancia existente entre el transmisor y el receptor. Por tanto a medida que aumente la separación entre ambos la potencia en el receptor irá disminuyendo. 1.7 Ecuación del Radar.7 Dados una antena que actúa tanto como transmisor y como receptor, y un objeto ubicado a una distancia r de la antena, deduciremos cuál es el valor de la potencia PR que es recibida por la antena en el momento de la recepción, después que la señal ha rebotado en el objeto. Podemos decir que la potencia de transmisión y la ganancia de la antena son valores conocidos. Es decir en el momento de la transmisión la potencia transmitida estará definida por PT y la ganancia de la antena será G D . 7 Rodolfo Rodríguez, “Apuntes de: ‘Sistemas de Comunicación Avanzada’” 19 Figura 1.19. Esquema de un radar mono estático Además el área efectiva del objeto es Ae y su sección de retro dispersión es σ . La densidad de potencia promedio ρ av a una distancia r de la antena es: ρ av = PT GD 4πr 2 (1.13) Si ρ RX es la densidad de potencia dispersa (que regresa) en la antena, entonces la potencia recibida PR es: PR = Ae ⋅ ρ RX (1.14) La sección de retro dispersión σ del objeto se define como: σ = 4πr 2 ρ RX ρ av (1.15) Despejando la densidad de potencia dispersa en el receptor ρ RX de la ecuación anterior: ρ RX = ρ av ⋅ σ 4πr 2 (1.16) Reemplazando la ecuación 1.16 en la ecuación 1.14, la potencia recibida será: PR = Ae ρ av ⋅ σ 4πr 2 (1.17) 20 Reemplazando la ecuación 1.13 en la ecuación 1.17 tenemos: PR = Ae ⋅ σ ⋅ GD ⋅ PT ( 4πr 2 )2 (1.18) La relación entre el área efectiva y la ganancia es: λ.2 Ae = GD 4π (1.19) Ahora reemplazando la ecuación 1.19 en la ecuación 1.18 obtenemos: 2 λ2 ⋅ G D ⋅ σ ⋅ PT PR = ( 4 π )3 r 4 (1.20) La fórmula anterior es la Ecuación del Radar y está expresada en función de la ganancia de la antena, pero podemos también expresarla en función del área efectiva. σ ⋅ PT Ae PR = 4π λ ⋅ r 2 2 (1.21) A lo largo de toda esta deducción no hemos considerado la existencia de pérdidas en la transmisión pero podemos considerar un factor “L” o factor de pérdidas que englobe todos los tipos de pérdidas existentes. Es decir la potencia real del receptor considerando las pérdidas será: 2 λ2 ⋅ G D ⋅ σ ⋅ PT PR = ⋅L ( 4 π )3 r 4 (1.22) Ae ⋅ σ ⋅ GD ⋅ PT ⋅L ( 4πr 2 )2 (1.23) PR = Debemos notar que la potencia de recepción es inversamente proporcional al valor de la distancia existente entre el transmisor y el receptor elevado a la cuarta. Por tanto a medida que aumente la separación entre ambos la potencia en el receptor irá disminuyendo. La diferencia entre la ecuación del radar y la ecuación de Friis se basa principalmente en que con la ecuación del radar PR disminuye de manera más rápida que con la ecuación de Friis para la misma distancia r . 21 1.8 Ecuación del Radar ST para Objetivos “Duros”8 Figura 1.20. Diagrama de la señal del radar UDEP A partir de la ecuación del radar deducida anteriormente podremos hallar una expresión que rija el comportamiento de un radar ST, que es con el que se cuenta en la Universidad de Piura, pero para blancos “duros”. Dada la ecuación general del radar: 2 λ2 ⋅ G D ⋅ σ ⋅ PT PR = ⋅L ( 4 π )3 r 4 (1.24) La sección de retro dispersión del objeto para este caso específico estará definida por: σ = πR 2 (1.25) Pero podemos relacionar el radio R con el ángulo θ , mediante relaciones trigonométricas, de la siguiente manera: R = r ⋅ tan θ 2 (1.26) Entonces remplazando el resultado anterior en la sección de retro dispersión del objeto, obtenemos: σ = π ⋅ r 2 ⋅ tan 2 8 θ 2 Rodolfo Rodríguez, “Apuntes de: ‘Sistemas de Comunicación Avanzada’” (1.27) 22 Luego reemplazamos en la ecuación del radar y obtenemos la Ecuación del Perfilador, que es la ecuación que rige al radar de la Universidad de Piura. 2 PR = 1.9 λ2 ⋅ G D ⋅ PT ⋅ tan 2 ( 4 π )3 r 2 θ 2 ⋅L (1.28) Índice de Refracción y la Ecuación del Radar ST para Objetivos “Blandos”9 Los ecos de aire claro atmosféricos detectados por radares ST provienen de la dispersión y/o la reflexión de inhomogeneidades en la constante dieléctrica atmosférica ε o equivalentemente en el índice de refracción n . Estas heterogeneidades son típicamente causadas o por la turbulencia tridimensional o por capas de diferente constante dieléctrica o índice de refracción. La constante dieléctrica ( ε ) está definida por la siguiente expresión ε = ε0εr (1.29) donde ε 0 es la constante dieléctrica del vacío y ε r es la llamada constante dieléctrica relativa del medio. Además, el índice de refracción n está relacionado con la constante dieléctrica por n = µrεr (1.30) donde µ r es la permeabilidad relativa del aire. Es posible afirmar que µ r ≈ 1 en el caso de la atmósfera. En general, el índice de radio de refracción (the radio index of refraction) en el rango de frecuencias desde MF hasta UHF está dado por la siguiente aproximación: n −1 = N 3.73 × 10 −1 e 77.6 × 10 −6 P + − e 2 T 2N C T (1.31) donde P es la presión atmosférica (en milibares), e es la presión parcial del vapor de agua (en milibares), T es la temperatura absoluta (en grados Kelvin), N e es la densidad numérica de electrones (m-3), y N C es la densidad plasma crítica (m-3). El primer término del lado derecho de la ecuación es a menudo llamado el término del vapor de agua y es la principal contribución al índice de refracción en la baja tropósfera debido al alto contenido de humedad (la troposfera contiene casi toda el agua y vapor de agua atmosférico). El segundo término, o término del aire seco, es la contribución más importante desde la media tropósfera hasta la estratosfera. El tercer término expresa la contribución debido a los electrones libres (plasma) en la atmósfera. La relación N e N C es despreciable por debajo de 50 Km, pero se convierte en la mayor contribución del índice de refracción por encima de ese nivel, donde la densidad de electrones incrementa rápidamente con la altura. 9 Luis Enrique Liziola, “Studies of Cuasi Horizontally Propagating Gravity Waves in the Troposphere using the Piura ST Wind Profiler” 23 Regresando a la ecuación del radar deducida anteriormente para “objetivos duros”, en radares atmosféricos la diferencia se manifiesta en la interpretación de la sección de retro dispersión efectiva ( σ ). En nuestra discusión previa de la ecuación del radar se había asumido implícitamente que la señal recibida por el radar era debida a un punto simple u “objetivo duro” presente en la celda de resolución del radar. Los objetivos metereológicos son objetivos distribuidos que por lo general llenan completamente la celda de resolución del radar. La sección de retro dispersión para un objetivo distribuido, a veces referido como un objetivo “suave”, está definida en términos de la reflectividad por unidad de volumen. Sea η (m-1) la reflectividad del radar por unidad de volumen. Luego la sección de retro dispersión del radar para un objetivo distribuido es: σ = ηV (1.32) donde V (m3) es el volumen de la celda de resolución del radar definido por V = π( r ∆θ ∆φ )( r )( ∆r ) 2 2 (1.33) y ∆r es la resolución de gama o range resolution definida como: ∆r = cτ 2 (1.34) Sustituyendo las ecuaciones 1.32, 1.33 y 1.34 en la ecuación general del radar obtenemos Pr = Pt G 2 λ2 Lη∆θ∆φcτ 512π 2 r 2 (1.35) y teniendo en cuenta que por definición la ganancia está definida por G( θ,φ ) = 4π ∆θ∆φ (1.36) podemos reemplazar la ecuación anterior en la ecuación 1.35 y obtenemos Pr = Pt G 2 λ2 Lηcτ 128πr 2 (1.37) la ecuación del radar para objetivos suaves. Nótese que la principal diferencia entre la ecuación del radar para objetivos suaves y para objetivos duros es que para un objetivo suave la potencia recibida es proporcional a 1 r 2 en vez de 1 r 4 y es también proporcional a G en vez de G 2 . 24 Típicamente, en la baja atmósfera, la reflectividad ( η ) está relacionada a la turbulencia y de este modo a la constante de estructura (structure constant) C n2 (una medida de la turbulencia) por η = 0.38C n2 λ−2 3 (1.38) C n2 está relacionada a la medida de la turbulencia en la atmósfera, la cual se incrementa con la altura. Formalmente C n2 es calculada por C n2 = 5.26 × δn 2 L0 −2 3 (1.39) donde δn 2 es la variación media cuadrática en el índice de refracción y L0 es la medida de los torbellinos de turbulencia. Estas complicadas pero bien establecidas fórmulas, nos permiten, bajo la mayoría de condiciones, relacionar los cambios en el índice de refracción de turbulencia con la potencia recibida por el radar observando dichos cambios, para todas las altitudes en la atmósfera.