Documento 876979
Anuncio

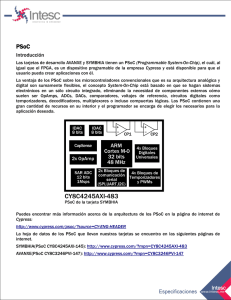
DISEÑO, IMPLEMENTACIÓN Y VERIFICACIÓN DE UN SISTEMA DE HARDWARE RECONFIGURABLE PARA APLICACIONES DE CONTROL. Javier Ernesto Santos Estepa Universidad Distrital Francisco José De Caldas 2015. Bogotá-Colombia Abstract—El presente artículo es la documentación de un proyecto, que se pretende mejorar de tal forma que se tenga una aplicación y mejoría notable en la comunicación de su parte de software y su parte de hardware. Mediante el uso de unas estructuras de software preestablecidas las cuales permitirán la configuración de parámetros físicos encargados del control. desean sintetizar no funcionan de manera adecuada por lo cual se pretende el desarrollo y aplicación de un sistema que emule completamente los factores modificados y permita la variación de parámetros de control sin problemas muy complejos. III. Posibles softwares Los sistemas encargados de generar simulación Palabras Clave- adquisición de datos, basados en modelos matemáticos son abundantes, Instrumentación, Control de caudal, Control de flujo, tanto en el ámbito académico con en el industrial, micróntroladores, comunicación. pero el software Matlab ®. Gracias a la versatilidad del software Matlab y de las herramientas que contiene, como Simulink, este es usado para I. RESUMEN distintas aplicaciones en los proyectos, entre las más En la actualidad el desarrollo de sistemas que sean destacadas se encuentran la interfaz grafica, cálculo, capaces de reproducir modelos exactos de diseño y simulación de sistemas [1]. Al revisar los artículos encontrados se encuentra la utilización de simulación son muy pocos pero los modelos Matlab por distintos autores, para distintas desarrollados para simular sistemas e introducir funciones, por ejemplo los autores Domínguez, variables físicas que se puedan presentar en el Rodríguez y Ruíz en su diseño de un sistema de campo de aplicación son muchos, por lo cual se digitalización de señal, utilizan el System Generator pretende utilizar algún tipo de software que permita de Xilinx junto con Simulink para generar el código tanto la simulación como la comunicación en necesario para implementar la FPGA en el proyecto tiempo real con sistemas de potencia encargados de [20], realizar la modificación de las variables físicas. La variación de los sistemas físicos corresponderá con lo mostrado en la simulación emulando un sistema que se comunicara en tiempo real la variación de realizada en los sistemas físicos. II. INTRODUCCION Cuando se analizan sistemas que tienen por objetivo generar patrones de números y constantes las cuales deben ser aplicadas más adelante en algún sistema que tenga por objetivo mediciones o variaciones de alguna variable física se debe tener en cuenta patrones de ruido y señales parasitas que hacen que el sistema que se diseñó no funcione de manera ideal si no por el contrario empieza e presentar fallas, puesto que los modelos que se Fig. 1. Ventana de demos de Matlab. Con el uso de System Generator, los autores lograron generar que el código del programa tuviera un nivel de abstracción más alto, así como la reducción de tiempo en la generación de dicho código; adicionalmente los autores aprovecharon el software Matlab para la creación de la interfaz gráfica [21]. Paralelamente los autores Gómez y Cerquides usan Matlab/Simulink para la creación de la interfaz de usuario para su simulador de radar, así como el desarrollo de los cálculos matemáticos necesarios para el tratamiento de las señales que intervienen en el radar, con la utilización de Matlab los autores lograron la reducción de los tiempos de simulación ya que la interfaz les permite tomar los datos necesarios en un periodo comprendido en el rango de los milisegundos [22]. IV. MICROCONTORLADOR Debido a que el sistema físico de control debe poder comunicarse con el software se elegirá un dispositivo con estas cualidades y que además sea accesible tanto en conocimiento como en herramientas de diseño como en variables físicas que pueda manejar variables como corriente y voltaje. Como el sistema debe comunicar el software con el hardware la comunicación juega un papel importante puesto que será la encargada tanto de comunicar datos como de reconfigurar el hardware basándonos en sistemas que permitan tener diferentes protocolos de comunicación se utilizara una herramienta que posee el software java en el cual descargara la información generada por medio de Matlab y la aplicara al sistema Psoc. VI. REFERENCES [1] E. Palacios, F. Remiro, and L. J. Lopez, Microcontrolador PIC16F84 Desarrollo de proyectos. 2006. [2] I. The MathWorks, “MATLAB - The Language of Technical Computing,” 2012. [Online]. Available: http://www.mathworks.com/products/matlab/. [3] J. Aracil and F. Gomez, “Introducción a Matlab y Simulink,” pp. 1–24, 2007. [4] I. The MathWorks, “Simulink - Simulation and Model-Based Design,” 2012. [Online]. Available: En el diseño del sistema embebido para el http://www.mathworks.com/products/simulink/. procesamiento de señales ultrasónicas, los autores [Accessed: 26-Sep-2012]. Cabrera y Velazco utilizaron Matlab para simular el [5] A. Montbrun, “SIMULINK,” 1997. [Online]. comportamiento de las señales ultrasónicas desde el Available: momento en que son emitidas hasta el momento de http://www.eldish.net/hp/automat/SIMULINK.htm. la recepción por el sistema. Para la implementación [Accessed: 21-Oct-2012]. de dicho sistema los autores utilizaron PSoC, una tecnología desarrollada por Cypress Semiconductor [6] C. Marrero Exposito, “Interfaz Gráfica de enfocada al desarrollo de los microcontroladores, Usuario, Aproximación semiótica y cognitiva,” creando una integración entre un bloque análogo y 2006. un bloque digital, los cuales pueden interactuar y D. O. Barragán Guerrero, “Manual de dar así una mayor variedad de opciones a la hora de [7] programar [19], los autores en este caso utilizan Interfaz Grafica de Usuarion en Matlab,” 2008. específicamente el bloque análogo de PSoC para el [8] I. The MathWorks, “MATLAB GUI.” acondicionamiento de la señal permitiendo así tener [Online]. Available: una mayor facilidad de incorporar mejoras en el http://www.mathworks.com/discovery/matlabsistema ya que el tratamiento de la señal se hace gui.html. [Accessed: 27-Oct-2012]. prácticamente en su totalidad dentro del PSoC [28]. [9] I. The MathWorks, “Simulink Coder.” V. ADQUISICIÓN DE [Online]. Available: DATOS http://www.mathworks.com/products/simulinkcoder/index.html. [Accessed: 14-Oct-2012]. [10] “Procesamiento de señales,” 2010. with-xilinx-system-generator-for-dsp.html. [Accessed: 14-Oct-2012]. [11] I. Acosta Cuadros, “¿Que es PSOC?” [Online]. Available: [21] I. Domínguez-rodríguez, F. E. Hernándezhttp://psocenespanol.blogspot.com/2011/09/que-esmontero, M. L. Ruiz-barrios, U. D. Pinar, and P. psoc.html. [Accessed: 03-Nov-2012]. Río, “Sistema de digitalización de señal basado en FPGA y configurado utilizando MatLab,” vol. 14, [12] Á. Paula and O. Joan, “INTRODUCCIÓN pp. 129–135, 2010. AL PSOC,” pp. 1–59, 2010. [22] A. Aránzazu Gómez and J. R. Cerquides [13] I. Acosta Cuadros, “Los bloques de PSoC.” Bueno, “DISEÑO Y REALIZACION DE UN [Online]. Available: SIMULADOR DE RADAR.” http://psocenespanol.blogspot.com/2011/10/losbloques-de-psoc.html. [Accessed: 03-Nov-2012]. [23] I. Hern, “Modulación QAM.” [14] I. Acosta Cuadros, “Características de los bloques Analógicos y Digitales.” [Online]. Available: http://psocenespanol.blogspot.com/2011/10/caracteri sticas-de-los-bloques.html. [Accessed: 03-Nov2012]. [24] S. A. Jiménez Núñez, D. E. Panchi Campos, and P. D. R. Á. R, “DISEÑO E IMPLEMENTACIÓN DE UN MODULADOR Y UN DEMODULADOR N-QAM EMPLEANDO XILINX ISE , SYSTEM GENERATOR Y SIMULINK SOBRE UNA TARJETA DE,” 2011. [15] J. Tapia F., “Bloques Digitales.” [Online]. [25] L. Nuaymi, “Wimax,” 26-Jan-2007. Available: http://www.psoc-chile.es.tl/Bloques- [Online]. Available: digitales.htm. [Accessed: 03-Nov-2012]. http://doi.wiley.com/10.1002/9780470319055. [Accessed: 14-Oct-2012]. [16] J. Tapia F., “Características Generales.” [Online]. Available: http://www.psoc- [26] U. G. March, “Spartan-3E Starter Kit Board chile.es.tl/Caracteristicas-Generales.htm. [Accessed: User Guide,” vol. 230, 2006. 03-Nov-2012]. [27] J. A. Marzo Icaza, “Simulación e [17] “El Futuro de la Computación Computadoras Implementación en FPGA de un Esquema de Analógicas, Digitales e Híbridas.” [Online]. Codificación del Canal sujeto al Estándar de Available: http://mariott- Wimax,” 2009. mariott.blogspot.com/2009/03/computadorasanalogicas-digitales-e.html . [Accessed: 16-Nov2012]. [18] EcuRed, “Computadora analógica.” [Online]. Available: http://www.ecured.cu/index.php/Computadora_anal %C3%B3gica. [Accessed: 16-Nov-2012]. [19] J. Tapia F., “PSOC-CHILE,” 2012. [Online]. Available: http://www.psoc-chile.es.tl/Psoc.htm. [Accessed: 01-Oct-2012]. [20] I. The MathWorks, “Simulink With Xilinx System Generator For DSP.” [Online]. Available: http://www.mathworks.com/fpga-design/simulink-