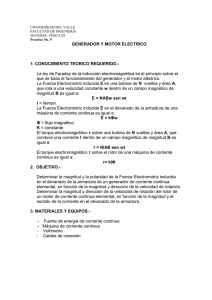
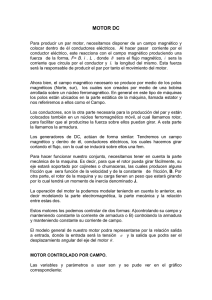
MÁQUINAS ELÉCTRICAS IV Ciclo Laboratorio N° 4 Motor de Corriente Directa INFORME Integrantes: RIVERA INGA, Karina GUZMAN APONTE, Julio Cesar URURI VELASQUE, Antony Grupo: C5-4-B Profesor: Cuba Anicama, Carlos Hernán Fecha de realización: 21 de marzo Fecha de entrega: 04 de abril 2016-I 1. INTRODUCCIÓN La máquina de corriente continua puede ser utilizada tanto como generador o como motor, aunque en la actualidad su uso está dado como motor, ya que la generación de energía en corriente continua se logra mediante equipos rectificadores, de mejor eficiencia y menor costo. En cuanto a su uso como motor, tiene gran importancia en la industria automotriz ya que los vehículos, cuentan con un número importante de motores de pequeña potencia (limpiaparabrisas, motor de arranque, levanta vidrios, calefactor, etc.) La máquina de corriente continua es una de las más versátiles en la industria. Su fácil control de posición, par y velocidad la han convertido en una de las mejores opciones en aplicaciones de control y automatización de procesos. En esta experiencia de laboratorio se estudiara la estructura básica del motor y generador DC, medir la resistencia en sus devanados, conocer los diferentes valores nominales de corrientes en los devanados, hallar la posición neutra de las escobillas, realizar las conexiones básicas del motor y observar el comportamiento de los parámetros del motor de acuerdo al conexionado serie o Shunt. 2. FUNDAMENTO TEORICO: Los motores de corriente continua son insuperables para aplicaciones en las que debe ajustarse la velocidad, así como para aplicaciones en las que se requiere un par grande. En la actualidad se utilizan millones de motores DC en automóviles trenes y aviones, donde impulsan ventiladores de diferentes tipos, también mueven limpia parabrisas y accionan los elevadores de asientos y ventanas. El motor DC tiene un estator y un rotor, este último es más conocido como armadura. El estator contiene uno o más devanados por cada polo, los cuales están diseñados para llevar corrientes directas que establecen un campo magnético. La armadura y su devanado están ubicados en la trayectoria de este campo magnético y cuando el devanado lleva corriente, se desarrolla un par que hace girar al motor. Hay un conmutador conectado al devanado de la armadura; en realidad, el conmutador es un dispositivo mecánico que sirve para que la corriente de armadura, bajo cualquier polo del estator, circule siempre en el mismo sentido, sin importar la posición. Si no se utilizara un conmutador, el motor solo podría dar una fracción de vuelta y luego se detendría. La corriente continua presenta grandes ventajas, entre las cuales está su capacidad para ser almacenada de una forma relativamente sencilla. Ésto, junto a una serie de características peculiares de los motores de corriente continua, y de aplicaciones de procesos electrolíticos, tracción eléctrica, entre otros, hacen que existen diversas instalaciones que trabajan basándose en la corriente continua. Los generadores de corriente continua son las mismas máquinas que transforman la energía mecánica en eléctrica. No existe diferencia real entre un generador y un motor, a excepción del sentido de flujo de potencia. Los generadores se clasifican de acuerdo con la forma en que se provee el flujo de campo, y éstos son de excitación independiente, derivación, serie, excitación compuesta acumulativa y compuesta diferencial, y además difieren de sus características terminales (voltaje, corriente) y por lo tanto en el tipo de utilización PARTES DE UNA MAQUINA DE CORRIENTE CONTINUA Fig. 01: Partes de un motor DC Estator: Parte fija formada por polos salientes y culata. Inductor: Devanado formado por bobinas situadas alrededor del núcleo de los polos principales. que al ser recorridos por la corriente de excitación crea el campo magnético inductor. Rotor: Parte móvil que gira alrededor del eje. Entrehierro: Distancia entre los polos principales y el rotor. Inducido: Devanado situado en las ranuras del rotor y que por la influencia del campo eléctrico, es objeto de fuerzas electromotrices inducidas y de fuerzas mecánicas. Zonas neutras: Puntos del inducido en los que el campo es nulo. Colector: Cilindro formado por delgas de cobre endurecido separadas por aislante, conectadas al inducido y giran conjuntamente con él. Escobillas: Piezas conductoras metalografíticas resistentes al rozamiento que estando fijas frotan con el colector móvil conectando el inducido con el exterior, al tiempo que provoca la conmutación para que trabaje con corriente continua. Polos auxiliares: Polos salientes situados entre los polos principales. cuyo arrollamiento está conectado en serie con el inducido de forma que al crear un campo contrario al de reacción del inducido evita sus problemas y provoca una buena conmutación sin chispas Funcionamiento como generador Si una armadura gira entre dos polos de campo fijos, la corriente en la armadura se mueve en una dirección durante la mitad de cada revolución, y en la otra dirección durante la otra mitad. Para producir un flujo constante de corriente en una dirección, o continua, en un aparato determinado, es necesario disponer de un medio para invertir el flujo de corriente fuera del generador una vez durante cada revolución. Las dos mitades del anillo se aislaban entre sí y servían como bornes de la bobina. Las escobillas fijas de metal o de carbón se mantenían en contra del conmutador, que al girar conectaba eléctricamente la bobina a los cables externos. Cuando la armadura giraba, cada escobilla estaba en contacto de forma alternativa con las mitades del conmutador, cambiando la posición en el momento en el que la corriente invertía su dirección dentro de la bobina de la armadura. Así se producía un flujo de corriente de una dirección en el circuito exterior al que el generador estaba conectado. Fig. 02: Generador Funcionamiento como motor En general, los motores de corriente continua son similares en su construcción a los generadores. De hecho podrían describirse como generadores que funcionan al revés. Cuando la corriente pasa a través de la armadura de un motor de corriente continua, se genera un par de fuerzas por la reacción magnética, y la armadura gira. La acción del conmutador y de las conexiones de las bobinas del campo de los motores son exactamente las mismas que usan los generadores. La revolución de la armadura induce un voltaje en las bobinas de ésta. Este voltaje es opuesto en la dirección al voltaje exterior que se aplica a la armadura, y de ahí que se conozca como voltaje inducido o fuerza contra electromotriz. Cuando el motor gira más rápido, el voltaje inducido aumenta hasta que es casi igual al aplicado. La corriente entonces es pequeña, y la velocidad del motor permanecerá constante siempre que el motor no esté bajo carga y tenga que realizar otro trabajo mecánico que no sea el requerido para mover la armadura. Bajo carga, la armadura gira más lentamente, reduciendo el voltaje inducido y permitiendo que fluya una corriente mayor en la armadura. El motor puede así recibir más potencia eléctrica de la fuente, suministrándola y haciendo más trabajo mecánico. Fig. 03: Motor DC 3. Objetivos Parte l Examinar la estructura de un motor/ generador de c-d Medir la resistencia en sus devanados Estudiar los valores nominales de corriente de los diversos devanados Parte ll Localizar la posición neutra de las escobillas Conocer las características de operación de motores en serie y en derivación 4. PROCEDIMIENTO PARTE I 4.1 Se examinó la estructura del módulo de motor/ generador de CD EMS 8211, donde se observó que la cubierta del motor se diseñó de manera que se pueda ver fácilmente su estructura interna. Fig. 04: Partes del motor DC Módulo de motor/generador Voltaje requerido Potencia Nominal Potencia nominal como generador Voltaje de armadura Voltaje de campo serie Velocidad nominal Corriente de carga nominal como motor Corriente de carga nominal como generador 220v - 50Hz 220v 175w 110w 220v- CD 220v- CD 1800 r/min 1.3 A 0. 5 A Tabla 01: Datos del motor DC. 4.2 Se observó el motor desde la parte posterior del módulo Fig. 05: Parte posterior del motor DC. Se identificó el devanado de la armadura Tiene 4 polos el estator Consta de 2 devanados; devanado en serie y devanado shunt. 4.3 Se observó el motor desde el frente del módulo Fig. 06: Parte frontal del motor DC. Se identificó el conmutador Aproximadamente hay 75 delgas Tiene 2 escobillas Se observó que la posición neutral de las escobillas se indica mediante una línea roja marcada en la cubierta del motor Las escobillas se pueden ubicar en el conmutador moviendo la palanca de ajuste de escobillas, hacia la derecha o izquierda. 4.4 Se observó el motor de la parte delantera del módulo Fig. 07: Parte delantera del motor Los devanados de campo en derivación están conectados con los terminales 5 y6 Los devanados de campo en serie están conectadas con las terminales 3 y 4 La corriente nominal de cada devanado está indica en la carátula del módulo, si se podría responder a lo mencionado con los terminales antes expuestos. Las escobillas se conectan en los terminales 1 y 2 4.5 El reóstato El reóstato está conectado a las terminales 7 y 8 La corriente nominal de la resistencia es de 0- 100 ohmios 4.6 Campo en derivación A continuación se midió la resistencia de cada devanado con el miltímetro. Se conectó el siguiente circuito Fig. 08: Campo en derivación. Fig. 09: Mediciones campo en derivación. Voltaje de campo en derivación 𝐸𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑑𝑒𝑟𝑖𝑣𝑎𝑐𝑖ó𝑛 = 99.90 𝑉𝑑𝑐 Se redujo el voltaje a cero y se calculó la resistencia del devanado de campo en derivación 𝑅𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑑𝑒𝑟𝑖𝑣𝑎𝑐𝑖ó𝑛 = 𝐸⁄𝐼 = 333Ω Se calculó la pérdida del devanado en derivación 𝑃𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑑𝑒𝑟𝑖𝑣𝑎𝑐𝑖ó𝑛 = 𝐼 2 ∗ 𝑅 = 29.97𝑊 4.7 Campo en serie Se conectó el siguiente circuito Fig. 10: Campo en serie Fig. 11: Mediciones campo en serie Se midió el voltaje en devanado de campo serie 𝐸𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑠𝑒𝑟𝑖𝑒 = 9.425 𝑉𝑑𝑐 Se redujo el voltaje a cero y se calculó la resistencia del devanado de campo en serie: 𝑅𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑠𝑒𝑟𝑖𝑒 = 𝐸⁄𝐼 = 6.274Ω Se calculó la pérdida del devanado en derivación 𝑃𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑑𝑒𝑟𝑖𝑣𝑎𝑐𝑖ó𝑛 = 𝐼 2 ∗ 𝑅 = 14.154 𝑊 4.8 Devanado de armadura Se armó el siguiente circuito Fig. 12: Devanado de la armadura Fig. 13: Mediciones en el devanado de la armadura. Se midió el voltaje en devanado de campo serie 𝐸𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑎𝑟𝑚𝑎𝑑𝑢𝑟𝑎 = 40.77 𝑉𝑑𝑐 Se redujo el voltaje a cero y se calculó la resistencia del devanado de campo en serie 𝑅𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑎𝑟𝑚𝑎𝑑𝑢𝑟𝑎 = 𝐸⁄𝐼 = 27.18Ω Se calculó la pérdida del devanado en derivación 𝑃𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑎𝑟𝑚𝑎𝑑𝑢𝑟𝑎 = 𝐼 2 ∗ 𝑅 = 61.155𝑊 4.9 Se giró el devanado de la armadura aproximadamente 90 hacia la izquierda 4.10 Se midió el voltaje en devanado de campo serie 𝐸𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑎𝑟𝑚𝑎𝑑𝑢𝑟𝑎 = 99.9 𝑉𝑑𝑐 Se redujo el voltaje a cero y se calculó la resistencia del devanado de campo en serie 𝑅𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑎𝑟𝑚𝑎𝑑𝑢𝑟𝑎 = 𝐸⁄𝐼 = 65.98 Ω Se calculó la pérdida del devanado en derivación 𝑃𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑎𝑟𝑚𝑎𝑑𝑢𝑟𝑎 = 𝐼 2 ∗ 𝑅 = 151.2486 𝑊 Se giró 15º más hacia la izquierda Se midió el voltaje en devanado de campo serie 𝐸𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑎𝑟𝑚𝑎𝑑𝑢𝑟𝑎 = 77.94𝑉𝑑𝑐 Se redujo el voltaje a cero y se calculó la resistencia del devanado de campo en serie 𝑅𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑎𝑟𝑚𝑎𝑑𝑢𝑟𝑎 = 𝐸⁄𝐼 = 51.89 Ω Se calculó la pérdida del devanado en derivación 𝑃𝑐𝑎𝑚𝑝𝑜 𝑒𝑛 𝑎𝑟𝑚𝑎𝑑𝑢𝑟𝑎 = 𝐼 2 ∗ 𝑅 = 117.06 𝑊 5. PROCEDIMIENTO PARTE II 5.1 Armadura-Campo en derivación Fig. 14: Armadura – Campo en derivación Se utilizó corriente alterna para determinar la posición neutra de las escobillas del motor de CD. Las terminales 4 y 5 de la fuente de alimentación proporcionarán un voltaje variables de 0-120 V CA, conforme se hace girar la perilla de control de la salida de voltaje. Se conectó la fuente de energía; colocar en la posición de 4-5 el conmutador del voltímetro de la fuente de energía y se movió lentamente hacia adelante la perilla de control de la salida del voltaje hasta que el voltímetro de CA conectado al devanado de campo en derivación indique aproximadamente 80V CA. Al mover las escobillas de una posición extrema a la otra, se observó que el voltaje de CA inducido a través del campo disminuye a cero y luego aumenta nuevamente conforme se llega a la otra posición extrema, siguiendo el sentido contrario al de las manecillas del reloj. Luego de la experiencia se dejó las escobillas en la posición en donde el voltaje inducido es cero. Este punto corresponde al plano neutro del Motor/Generador de CD, las escobillas deben ajustarse a la posición neutra. 5.2 Armadura-Campo en serie Fig. 15: Armadura – campo en serie Se conectó el siguiente circuito, donde se observa que la armadura está conectada en serie con el devanado de campo en serie, a través del voltaje de entrada. Se conectó a la posición 7-n de la fuente de alimentación. Ajuste el voltaje hasta 120 V dc. Se observó que el motor gira rápidamente. Se usó un tacómetro manual y se obtuvo la velocidad del motor en RPM. Velocidad en serie = 3047 r/min Después, se redujo el voltaje de la fuente de energía y se observó el efecto que produjo en la velocidad del motor el motor se embala porque no hay carga. Se redujo el voltaje, donde se pudo determinar la dirección de rotación del motor en la siguiente velocidad. Rotación = horario Se conectó el siguiente circuito, el único cambio hecho es que las conexiones a las armaduras quedaron invertidas. Fig. 16: Inversión de conexiones Se usó un tacómetro manual y se obtuvo la velocidad del motor en RPM. Velocidad en serie = 2517 r/min Rotación: anti horario 5.3 Conexión del motor campo en derivación Se conectó el siguiente circuito, donde se observa que el reóstato está en serie con el campo en derivación y que esta combinación se conecta en paralelo con la armadura a través del voltaje de entrada (120 v). Se ajustó el reóstato a la resistencia mínima (aproximadamente cero ohmios cuando se hace girar a la posición extrema en el sentido de las manecillas del reloj). Se midió la velocidad del motor con el tacómetro. Velocidad en derivación (cero ohmios)= 795 r/min Se ajustó el reóstato a la resistencia máxima (aproximadamente 100 ohmios). Velocidad en derivación (100 ohmios) = 1496 r/min Rotación = horario Invirtiendo la polaridad del voltaje de entrada intercambiando solo los cables de conexión de la fuente de energía se obtuvo lo siguiente: No cambio la rotación de dirección No varió la velocidad Al invertir las conexiones de la armadura se obtuvo que si cambio´ la dirección de rotación. Rotación= anti horario No varía la velocidad 5.4 Mientras el motor siga funcionando se abrió momentáneamente el circuito de campo en derivación, quitando el cable de conexión de uno de los terminales del devanado de campo en derivación (5 o 6). Cuando un motor DC pierde alimentación el campo en derivación, este empieza a aumentar su velocidad (hacia el ∞), es decir el motor se embala. ¿Ocurre lo mismo en un motor DC conectado con el campo serie? No, porque no tiene campo shunt Un motor DC conectado con el campo serie se embala cuando no se tiene una carga en su eje (necesita carga si no se embala (destruye). 5.5 Se conectó la siguiente figura La armadura está conectada a la salida de variable de 0-120v cd, por otro lado el campo en derivación está conectado a la salida fija de 120V cd. Usando el tacómetro se midió lo siguiente, completando la siguiente tabla: E(voltios) 0 30 velocidad 0 145.8 271.8 90 120 426.2 574.1 ¿Es un buen método de control de velocidad el hacer que varíe el voltaje de la armadura (manteniendo constante el voltaje del campo en derivación? Un buen método para el control de velocidad es hacer variar el voltaje de la armadura, pero manteniendo constante el voltaje del campo en derivación. GRAFICA VELOCIDAD VS TENSIÓN 6. CUESTIONARIO Parte I: 1. ¿Cuál sería la corriente del campo en derivación del motor, si el devanado de campo en derivación se excita mediante 120V c-d? Como esta en paralelo el voltaje es el mismo y se divide entre la impedancia de la bobina más el potenciómetro. I=E/RDERIVACION=120 V/ 333 Ω = 360 mA 2. Si se tiene una corriente de 3A c-d que fluye por el devanado de campo serie del motor ¿Cuál será la caída de voltaje resultante? Sería la corriente por la resistencia de la bobina. V=I*R=3 A*6.274 Ω = 18.822 V 3. Si el reóstato se conectara en serie con el devanado de campo en derivación y la combinación se conectara a una línea de 120V c-d, ¿Qué variaciones de corriente del campo en derivación se podrían obtener en su motor? Esto dependería de la resistencia del reóstato. I max = 24 A DC 4. Todos los devanados, e incluso el conmutador del motor, están hechos de cobre ¿Por qué? Por las características conductivas del cobre además es más barato que otros conductores. 5. ¿Por qué las escobillas del motor están hechas de carbón y no de cobre? Esto debe para evitar el calentamiento a causa del rozamiento entre el conmutador y las escobillas. 6. Si el devanado de campo en serie del motor se conectara directamente a la fuente de energía de 120V c-d: a) ¿Qué flujo de corriente se tendría? I = V/ resistencia de armadura b) ¿Cuál sería la perdida de potencia (en watts)? P = I2 * V c) ¿se pierde toda esta energía solo en forma de calor? Si ya que las bobinas tienen una pequeña resistencia interna que disipa calor. d) ¿Qué cree que le suceda al devanado si la corriente se mantuviera durante algunos minutos? Comenzaría a calentarse los devanados. 7. ¿Qué significa “corriente nominal” y “voltaje nominal”? Es la corriente a la cual el motor opera a su máxima eficiencia. 8. Si el devanado de la armadura y el de campo en serie del motor se conectaran en serie a una fuente de 120V c-d, ¿Cuál sería la corriente inicial? I= 120/(27.18+6.274) I= 3.587 A 9. En este motor, ¿es la resistencia de la armadura (mas las escobillas) substancialmente la misma para cualquier posición de rotación de la armadura? No, ya que mediante cambia la posición del devanado de la armadura, varia también su resistencia. Va depender de la ubicación del plano neutro. Parte II: 1. Explique cómo se localiza la posición neutra de las escobillas de un motor de c-d. Ubicando el punto de color rojo que se encuentra en la parte superior del motor. Se gira el devanado de la armadura hasta obtener una corriente aproximadamente igual a cero 2. ¿Giraría el motor si solo se excitara la armadura (se le aplica un voltaje)? No, esto se debe a que los devanados de estator no están polarizados y esto impide generar campo internamente 3. ¿Por qué es peligroso aplicar energía a un motor de c-d serie, sin ninguna carga? Porque su velocidad se dispara lo que provocaría que se destruya. El motor tenderá a embalarse y esto no es bueno 4. ¿Cuáles con las dos formas en que se puede invertir la rotación de un motor de c-d conectado en derivación? Cambiando la polaridad de la excitación. Cambiando la polaridad del inducido. 5. ¿Por qué se necesitan detectores de perdida de campo en motores grandes de c-d? Se necesitan porque los motores grandes deben tener una velocidad constante, por lo cual si hay una perdidas de campo la velocidad sufriría una disminución de r/min y afectaría el proceso. 6. En el procedimiento 20: a) ¿Se duplica la velocidad del motor cuando se duplica el voltaje de la armadura? Si, se duplica la velocidad ya que es directamente proporcional a la variación de tensión. b) ¿Sería correcto afirmar que con un voltaje fijo de campo, la velocidad de un motor en derivación es proporcional al voltaje de la armadura? Si, se observó en el ejercicio que según aumentamos la tensión la velocidad también aumentaba. 7. ¿Cuáles son las dos formas en que se puede variar la velocidad de un motor de c-d? Conexión de motor en serie: tensión variable. Conexión de motor en derivación, donde la tensión de derivación es fija y la tensión de armadura es variable. 8. De los dos métodos dados en (8): a) ¿Cuál de los dos da el mayor rango de velocidad? Conexión de motor en serie da mayor rango de velocidad b) ¿Cuál es el más económico (utiliza menos partes)? Conexión de motor en serie, utiliza solo una fuente de alimentación tanto par el de serie y a la armadura. 1. Observaciones: Se observó que al invertir el sentido de la armadura, tanto con campo en serie como en Shunt, se invierte el giro del motor. Cuando se invierte la polaridad de la fuente no ocurre nada en la dirección. Se observó que conforme se aumenta la tensión en la armadura, también aumenta proporcionalmente la velocidad de giro del motor, recordando que con campo en derivación se tiene una tensión fija. Se observó que con el campo en derivación se puede tener más control de la velocidad de giro del motor que con el campo en serie. Esto solo cuando el motor trabaja sin carga. Se observó que cuando se quita una línea al campo de derivación de un motor DC este se embala, es decir aumenta su velocidad (hacia el ∞), lo cual el motor puede destruirse. Se observó que con el campo en serie y sin carga, se dispara la velocidad del motor (se embala), esto puede provocar que el motor se destruya. . El plano neutro de la máquina DC se encuentra en el punto donde la tensión sea la mínima posible (OL). Cuando se ha reducido la tensión o voltaje de la fuente de energía se producía una disminución de la velocidad del motor. Se pudo percibir el incremento repentinamente o embale de la velocidad de motor cuando pierde la fuente de alimentación al campo en la conexión a un motor en derivación. 2. Recomendaciones: No retire o abrir el circuito en paralelo de campo de conexión en derivación mientras esté en marcha, ya que, el motor se embalara y este se dañara. Tener mucho cuidado de no tocar ninguna de las conexiones de uno de los terminales y ningún metal, al efectuar las mediciones de los motores. Se debe tener en cuenta las conexiones de los circuitos de los motores DC ilustrados en las figuras, ya que si no los conectáramos correctamente se podría producir cortocircuitos y daños en los devanados. 3. Conclusiones: Parte I: Se midió la resistencia de los devanados de derivación, serie y armadura, obteniendo que la de derivación tiene mayor resistencia de los tres. Además, se calculó la potencia de perdida de los tres devanados obteniendo que la de derivación tiene mayor perdidas en sus devanados. Se examinó la estructura de un motor / generador DC logrando identificar los 4 polos del estator, los devanados de campo en derivación (conductor delgado), devanados de campo en serie (conductor grueso) y los devanados de la armadura (rotor). Se estudió los valores nominales de corriente de los diversos devanados. El devanado en serie tiene una corriente de 1.5 A y el de derivación (shunt) tiene un valor de 0.5 A. Parte II: Se varió la velocidad de un motor, variando la tensión en una conexión serie. También se varió la velocidad en una conexión en derivación siempre cuando en sus devanados tenga una tensión fija de 250 V y en la armadura una tensión variable. Se localizó la posición neutra de las escobillas haciendo la prueba en el laboratorio alimentado a la armadura con una tensión alterna. Se conoció y conectó las conexiones básicas del motor como en serie y en derivación. Al intercambiar la posición de la armadura se intercambia la dirección del motor. Se observó las características de operación de motores conectado en serie y en derivación. Cuando se desconecta la alimentación al devanado de derivación se embala el motor. En cambio en conexión en serie, el motor se embala si no se tiene una carga en el eje del motor. 4. Referencias bibliográficas: Fraile, J. (2008). Máquinas eléctricas (6ª ed). Madrid: McGraw-Hill. Chapman, S. (2000). Máquinas Eléctricas (3° ed). Madrid: McGraw-Hill