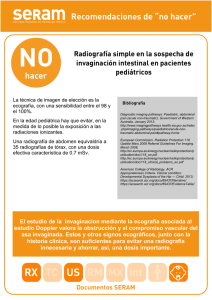
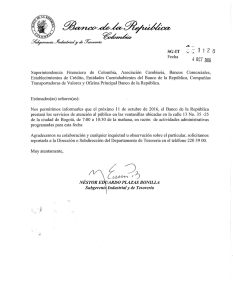
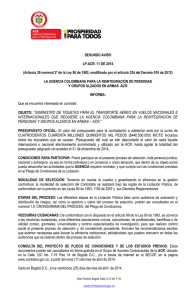
SCADA Applied to Electrical Systems (ELEG1022) Simulation Assignment 3 Undergraduate Program in Electrical Engineering Síxifo Falcones FIEC-ESPOL Tarea • Modelar un sistema de distribución con Loop Automation en el simulador en tiempo real. La red debe tener con al menos: – 2 alimentadores (feeders) y 1 enlace (tie) – 1 CB de subestación, 1 ACR de alimentador, 2 ACR intermedios por cada alimentador – 1 ACR de enlace • Esta vez, la falla se ubicará entre el ACR de alimentación y el primer ACR intermedio de una línea (ver siguiente diapositiva), por lo tanto al final se habrá experimentado dos disparos de las protecciones. • El despeje de la falla debe ser realizado de manera automática por el correspondiente ACR. • Los ACR deberán reconfigurar la red de manera automática siguiendo la estrategia de Loop Automation Clásico explicado en la presentación de Schneider Electric. Classic Loop Automation [1] CB1 Primer Disparo de la Protección Segundo Disparo de la Protección F1 Feeder ACRs M2 Mid-point ACRs Tie ACR T CB2 F2 M3 M4 CB1 F1 M1 M2 Feeder ACRs CB2 CB: Circuit breaker M1 Mid-point ACRs F2 M3 ACR: Automatic circuit recloser Tie ACR T M4 Source: Schneider Electric Secuencia del Loop Automation Clásico 1. 2. 3. 4. 5. 6. La falla es detectada y es despejada después de un tiempo prudencial por el ACR F1, por estar más próximo a la falla ACRs M1, M2 y T inician sus respectivos temporizadores antes de iniciar la secuencia de reconfiguración de la red Cuando se cumple el tiempo de los ACRs M1 y M2, ellos cambian su dirección de protección pero permaneciendo cerrados Cuando se cumple el tiempo del ACR T, él cierra sus contactos La falla es detectada nuevamente y es despejada después de un tiempo prudencial por el ACR M1, por estar más próximo a la falla De esta manera el segmento de la red con la falla a quedado finalmente aislado Indicaciones • Desarrollar el modelo en Matlab R2015b • Compilar el modelo y cargarlo en el target utilizando RT-Lab • Debe correr en pasos de tiempo discreto de mínimo 50e-6 segundos • Separar el modelo en tres subsystems: master (SM_???), slave (SS_???) y console (SC_???) • Diseñar una HMI dentro del subsystem console, lo más amigable posible con bloques que sean compatibles con el simulador. Debido a que NO podrá utilizar los indicadores de la librería “Dashboard,” utilice “1” ó “0” para indicar el estado de cada ACR y CB. Puede bosquejar un diagrama unifilar (mímico) utilizando la opción “Area” en la barra lateral de Simulink. (Ver ejemplo que sigue) • Dentro del subsystem slave implementar las funciones necesarias para automatizar la operación de los ACRs, especialmente, los temporizadores. • Trabajar en grupos de 2 estudiantes Simulink Model Example In Out In1 Out1 Out2 I_rms I_inst Out Out3 SM_Grid In2 Out4 SS_IEDs State SC_HMI Console Example Human Machine Interface [CB_1] State [ACR_F1] CB_1_State [CB_2] 3 1 [CB_1] [ACR_M1] ACR_F1_State [ACR_F1] [ACR_F2] [ACR_M1] 1 [ACR_M2] ACR_M1_State 1 ACR_M2_State 0 [ACR_T] DIAGRAMA UNIFILAR [ACR_M2] [ACR_M3] [ACR_M4] ACR_T_State [ACR_T] 1 [CB_2] [ACR_F2] CB_2_State CB_1 1 ACR_F2_State [ACR_M3] 1 [ACR_M4] ACR_M3_State 1 ACR_M4_State [CB_1_man] [CB_2_man] [CB_1_man] 1 0 ACR_M1 831.4 [ACR_F1_man] [ACR_F2_man] I_a (rms) [CB_2_man] 913.2 1 I_rms CB_2 I_b (rms) ACR_M2 [ACR_F1_man] 1005 1 0 Out ACR_F1 I_c (rms) ACR_M3 [ACR_F2_man] ACR_F2 ACR_M4 2 I_inst I_abc (rms) I_abc (instantaneous) Currents Scope ACR_T MANUAL COMMANDS MEASUREMENTS Recomendaciones 1. Asegúrese de que el modelo esté corriendo en su PC según las especificaciones y de que sea compatible con Matlab R2015b 2. Reserve el horario para trabajar en el Laboratorio de Simulación en Tiempo Real. Recuerde que trabajarán dos grupos a la vez por limitaciones de recursos. 3. Ya en el laboratorio, haga una copia de su archivo con extensión .mdl y modifíquelo agregándole los bloques “OpComm” y “Memory” para que pueda ser compilado y descargado al target (hardware del simulador). Favor, referirse al tutorial (ver diapositiva de referencias): “Samaniego_Introduction_Real_Time_Simulation.pdf” 4. Una vez que la simulación en tiempo real del modelo esté funcionando, tome capturas de la consola para cada estado de la secuencia que sigue el sistema en respuesta a la falla. Grading Criteria • La nota dependerá de: – que corra la simulación según las especificaciones – el desempeño de la automatización – el diseño de la HMI – la organización de los bloques y líneas – la entrega a tiempo • Los trabajos serán presentados en el Laboratorio de Simulación en Tiempo Real Referencias [1] “Loop Automation” Schneider Electric [2] http://sites.ieee.org/pestestfeeders/resources/ [3] Tutorial para simular en tiempo real: https://www.dropbox.com/s/4k1v8zxwmqtkhbi/ Samaniego_Introduction_Real_Time_Simulation .pdf?dl=0