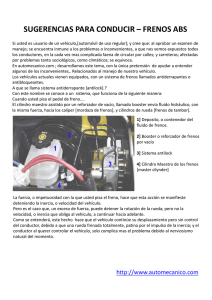
REPORTE DE DISEÑO DE VEHÍCULO ELÉCTRICO UNIVERSIDAD AUTÓNOMA DE OCCIDENTE ANDRÉS FERNANDO SILVA BRENDA RINCON CARREÑO CESAR AUGUSTO PAZ CARLOS LOPEZ CHAMPUTIZ JUAN ESTEBAN VELEZ SALAZAR MARÍA CAMILA MEDINA VIVEROS MARIO GUTIÉRREZ SANTIAGO SPITIA TABORDA ISRAEL MARTINEZ Maestro tutor: EMERSON ESCOBAR NUÑEZ eescobar@uao.edu.co (2)3188000-Ext. 11395 Santiago de Cali, Valle Del Cauca 2019 INTRODUCCIÓN La Universidad de Antioquia y la Universidad de la Sabana, han decidido organizar la “I Competencia de vehículos eléctricos de Colombia” esto con el fin de incentivar a estudiantes de ingeniería al diseño y manufactura de un vehículo eléctrico con eficiencia energética y cumplir con criterios de velocidad y maniobrabilidad que establece esta competencia. Por lo que en este proyecto, se establecen los parámetros de selección y los cálculos correspondientes sobre los componentes que conforman el vehículo eléctrico para cumplir con las debidas restricciones que aseguran la seguridad del equipo de trabajo. La distribución del trabajo cooperativo se distribuyó de acuerdo a la cantidad de componentes que el equipo de trabajo desglosó de los objetivos del vehículo, los cuales son expuestos en el desarrollo de este informe. DESARROLLO DE CONTENIDO: Frenos: Reglamento I competencia nacional de vehículos eléctricos: los vehículos deben estar equipados con dos sistemas de frenado operados independientemente; cada sistema debe ser operado por un control diferente. Un sistema debe operar sobre las ruedas delanteras y el otro sobre las ruedas traseras. No se permite que el sistema de frenos actúe directamente sobre la rueda. El sistema de frenado debe estar calibrado de tal manera que tenga un frenado balanceado.[11] Basados en dichos reglamentos, lo esperado del sistema de frenado en el vehículo, es que pase la prueba de frenado que se realizará en la competencia: Prueba de frenado: la efectividad del sistema de frenado será comprobada durante la inspección del vehículo. El vehículo será colocado en una pendiente del 10% con el conductor adentro, los frenos serán activados cada uno a su turno. Cada sistema deberá mantener el carro inmóvil. Los frenos son un elemento de seguridad muy importante en cualquier vehículo, sobre todo porque de su buen estado y funcionamiento va a depender el que seamos capaces de controlar nuestro vehículo ante un imprevisto, detenerlo o, simplemente, que podamos evitar tener un accidente. Para esto se cuenta con una variedad de mecanismos, que de acuerdo a la necesidad, el costo y el mantenimiento, pueden servir para cumplir la función de frenado. A continuación se mostraran los tipos de frenos más comunes: 1) Frenos de Aro: Esta familia de frenos es de las más comunes y se llama así precisamente porque aplican la fuerza de frenado en el aro de la rueda. Se han presentado notables mejoras en su efectividad gracias a la implementación de nuevos materiales para las zapatas y mejores configuraciones mecánicas que ofrecen una mayor ventaja mecánica. Se sabe que al aplicar las zapatas de freno en un radio casi igual al de la llanta, la fuerza requerida es mucho menor que en cualquier otro sistema. Debido a que la instalación requiere de un punto de apoyo a cada lado de la rueda, solo se puede utilizar con el estribo de dirección o “tenedor” propio de una bicicleta convencional, esto puede agregar peso y complicar innecesariamente los sistemas de dirección del vehículo. Sin embargo este tipo de sistemas de frenado son de fácil adquisición y de bajo precio. [1] Figura 1. Sistema de frenos de zapata corta ó “V-Brake”. Cualidades: ● ● ● ● Son mecanismos simples y relativamente económicos. Son ligeros ya que aprovechan el aro para frenar. Tienen buena disipación del calor. Generan menor esfuerzo que los frenos de maza, tanto en el cuadro, horquilla (también conocida como tijera en algunos países) y rueda al momento del frenado. Debilidades: ● ● ● ● A pesar de disipar el calor de manera eficiente, los aros pueden llegar a sobre calentarse y causar una pinchadura. Por ejemplo si se usan para controlar la velocidad en una pendiente prolongada en una bicicleta con demasiado peso o en una bicicleta tándem. Una zapata mal ajustada puede dañar la cubierta. La fricción va desgastando el aro por lo que en algún momento habrá que cambiar los aros. El frenado se ve afectado con la presencia de agua, lodo, etc en el aro. 2) Frenos de tambor: El uso de los Frenos de Tambor no es tan común, principalmente porque son pesados en comparación con otros sistemas. Su funcionamiento consiste en un par de zapatas contenidas en un cilindro o tambor. Al accionar el mecanismo las zapatas presionan hacia fuera, contra la cara interna del cilindro y generan la fuerza de frenado. Existen frenos de tambor integrados a la maza y otros que son externos. El problema con los integrados es que si llegan a fallar es necesario cambiar toda la rueda. Con los externos simplemente hay que cambiar el mecanismo de freno. A pesar de que su desempeño no se ve afectado con la presencia de agua su punto débil es su reducida área para disipar el calor. Figura 2. Freno de tambor Shimano. Cualidades: ● ● ● ● Su desempeño no se compromete tanto con las inclemencias del tiempo (lluvia, lodo, etc.) Su desempeño no se afecta por imperfecciones en el aro o alineación de la rueda. Se pueden utilizar con ruedas de diferentes rodados. Requieren poco mantenimiento. Debilidades: ● ● ● Generan un mayor esfuerzo, especialmente en la horquilla de la bicicleta al ser aplicados. Su área para disipar el calor es considerablemente menor que la de los frenos de aro. Son componentes relativamente más pesados y costosos. 3) Frenos de disco: Los frenos de disco han tenido gran auge, especialmente en bicicletas de montaña, desde hace ya algunos años. Esto se debe a que es más difícil que este tipo de freno se llene de lodo o se moje al pedalear por la montaña. Además, los frenos de disco no afectan su desempeño como consecuencia de las imperfecciones del aro. El sistema consta de un disco rotor metálico sobre el que se ejerce presión a través de las pinzas de freno (que tienen montadas unas pastillas de material de fricción llamadas “zapatas”) mediante un sistema hidráulico, normalmente. Estas pastillas son las que se aplican contra la superficie del disco para generar fuerza de frenado. Figura 3. Freno de disco. Cualidades: ● ● ● Ofrecen muy buena fuerza de frenado y modulación. Su desempeño no se afecta tanto en condiciones húmedas y de lodo. Un aro deformado no afecta su desempeño. Debilidades: ● ● ● ● Son relativamente más costosos de adquirir y de mantener. Ejercen más esfuerzo en la horquilla al momento de frenar, por lo que necesitan ser más robustas. Son más difíciles de ajustar, especialmente si el sistema es hidráulico. Las ruedas pueden ser más débiles debido al ángulo de los radios. [2] Para seleccionar el adecuado sistema de frenos al vehículo se procede a implementar una matriz de pugh, la cual es un tipo de herramientas que normalmente se utiliza para la toma de decisiones sobre el desarrollo de un nuevo producto o servicio: En esta matriz se seleccionó: ● Concepto 1 - Frenos de Aro (V-brakes). ● Concepto 2 - Frenos de tambor. ● Concepto 3 - Frenos de disco. Figura 4. Matriz de selección para sistema de frenos. Cómo se logra observar en la Figura 4, en la sección de Rank el concepto 3 ha quedado en primer lugar, por consiguiente el sistema que se implementará al vehículo electrico será el de freno de disco. Actualmente los sistemas de freno de disco vienen en dos presentaciones: ● Sistemas mecánicos por cable: el freno se acciona mediante una palanca o una manecilla, la cual hala un cable metálico alojado en el interior de una funda, dicha acción, comprime dos pastillas de freno contra el rotor con el fin de frenar. Figura 5. Sistema de freno de disco accionado por cable metálico. La ventaja de un freno mecánico es que el cableado es simple y las partes siempre están disponibles en el mercado. La principal desventaja es que la fricción existente entre el cable y la base reduce la fuerza efectiva que se puede aplicar al mecanismo de freno. ● Sistema hidráulico: se basan en un sistema de tuberías y cilindros hidráulicos para proporcionar una mejor actuación. Como con todos los sistemas hidráulicos, el medio para la transmisión de potencia es un aceite ligero que se mueve a través de una línea semi-rígida, desde la bomba ó cilindro maestro, a la mordaza, la cual puede tener desde uno hasta cuatro pistones. La cantidad de la fuerza desarrollada por el sistema depende de la relación entre el cilindro maestro y los pistones en la mordaza. La fuerza directa que puede ser aplicada por un sistema hidráulico es superior que la de un sistema mecánico por cable. Figura 6. Sistema de freno de disco accionado hidráulicamente. La aplicación de estos sistemas requiere de mayores destrezas técnicas y conocimientos específicos para evitar inconvenientes o daños, ya que las piezas de repuestos son costosas, y no siempre son de facil adquisicion. Debido a que se espera que la velocidades del vehículo no superen los 30 km/h, se optó por los frenos de disco accionados mecánicamente, esta selección es debido a que el costo es mucho menor que los frenos de disco accionados hidráulicamente. Nombre Precio AFTERPARTZ NV-5 G3/ HS1 Bike Disc Brake Kit Front and Rear 160mm Caliper Rotor BB5 BB7 BB-5 BB-7 198.900 Ya establecido el sistema de frenos que tendrá el vehículo, se debe proceder a seleccionar específicamente el kit de sistema de frenado que se instalará en el vehículo, ya que exiten muchos de diversas marcas que ofrecen características distintas. Hacer una elección correcta del diámetro del disco de freno es muy importante, ya que puede ayudar a mejorar la eficiencia en la potencia de frenada, alcanzar un mejor rendimiento en los recorridos y reducir la posibilidad de protagonizar un accidente en la vía. En el mercado, hay cuatro tamaños principales: 140, 160, 180 y 200 mm. Entre más grande sea el rotor (disco), más fuerza de frenado y mayor disipación del calor se podrá generar. 140 mm: es un disco de una dimensión menor que se ha venido archivando en disciplinas como el mountanbike, pero que resulta una buena opción para instalar sobre la horquilla y el cuadro de bicicletas de carretera o ciclocross en donde el peso es mejor y por lo tanto la aceleración y el avance es más eficiente. 160 mm: son los discos más utilizados por la mayoría de pedalistas aficionados y profesionales gracias a su buena relación entre peso y capacidad de frenada. Este diámetro es ideal para montar sobre la horquilla y el cuadro de bicicletas de modalidad Cross Country o también conocidas en el mundo del mountanbike como Rally o XC. 180 mm: si bien en las bicis de XC funciona muy bien un rotor de 160 o 180 mm, en las bicicletas de modalidad enduro si o si es muy importante montar un disco de 180 mm en adelante. Entre más grande sea la dimensión del disco de freno mayor será la potencia de frenado. Por lo general, los tamaños más grandes van instalados en los modelos más veloces como aquellas bicicletas de enduro y trail en las que se deben afrontar descensos a gran velocidad por caminos con dificultades técnicas considerables. Para seleccionar un adecuado tamaño del rotor se procede a realizar los siguientes cálculos: Esquema del rotor. Sobre la cara del disco, se considera un anillo de área diferencial, de ancho igual a dr. La fuerza diferencial que actúa sobre este anillo es dF = P θr dR (ecuación 1) donde r es el radio, θ es el ángulo del anillo en radianes y P es la presión uniforme sobre la cara del disco. Para un disco de circunferencia completa θ = 2π. La fuerza axial F total sobre el disco se obtiene integrando esta expresión, entre los límites R1 y R2 . R2 F = 2 Pθ 2 (R2 ∫ P θR dR = R1 − R1 2 ) (ecuación 2) El torque de fricción sobre el anillo del elemento diferencial es: dT = P θμR2 dR (ecuación 3) Donde μ es el coeficiente de fricción. El torque total para un disco es: T = R2 ∫ P θμR2 dR = R1 P θμ 3 3 (R2 − R1 3 ) (ecuación 4) Para un disco con N caras en fricción: T =N P θμ 3 3 (R2 − R1 3 ) (ecuación 5) Las ecuaciones 2 y 5 se combinan para obtener una expresión del torque como función de la fuerza axial. (R 3 −R 3 ) T = N μ F 32 (R2 2 −R1 2 ) (ecuación 6) 2 1 La ecuación 6 se utiliza en casos de presión uniforme. Se supone que la tasa W de desgaste constante es proporcional al producto de la presión P por la velocidad V . W = P V = constante (ecuación 7) Y la velocidad en cualquier punto sobre la cara del disco es V = r ω (ecuación 8) Al combinar estas ecuaciones, y suponer una velocidad angular constante ω , P r = constante = K (ecuación 9) La presión más grande P max debe ocurrir en el radio R2 más pequeño. K = P max R1 (ecuación 10) Al combinar estas dos últimas ecuaciones, se obtiene una expresión para la presión en función del radio R : P = P max R1 R (ecuación 11) Donde la presión máxima permisible P max variará con el uso del material del recubrimiento. La fuerza axial F se determina integrando la ecuación 1 , para la fuerza diferencial sobre el anillo diferencial, con la ecuación 11 y sustituyendo P . F = R2 ∫ R1 R2 P θR dR = ∫ (P max R1 R2 R) θR dR = R1 P max θ(R2 − R1 ) (ecuación 12) El torque se obtiene integrando la ecuación ecuación 3 con la misma sustitución: T = R2 ∫ P θμR2 dR = R1 θ 2 μ R1 P max (R2 2 − R1 2 ) (ecuación 13) Se combinan las ecuaciones 12 y 13 para una expresión que relaciona el torque con la fuerza axial para el caso de desgaste uniforme: T =N μF (R2 +R1 ) 2 (ecuación 14) Donde N es el número de superficies de fricción en el disco, la ecuación 14 se utiliza en casos de presión uniforme. A partir de las ecuaciones 3 y 4 , se demuestra que el torque máximo para cualquier radio exterior ro se obtiene cuando el radio interior es: R1 = 0.577R2 (ecuación 15) Para efectos de cálculos procederemos a plantear un escenario en donde apliquen los conceptos expuestos: Nuestro vehículo eléctrico pesa 980 N , incluyendo al conductor. En el frente tiene dos ruedas de bicicleta de 0.5080 m de diámetro, que tendrán frenos de disco con dos almohadillas en la mordaza para cada rueda. Los frenos deben ser capaces de detener totalmente el vehículo en una distancia de 3, 5 m, a partir de una velocidad de 8, 333 ms . Despreciando las fuerzas de resistencia aerodinámica y de rodamiento: Diseñe los frenos de disco con dos almohadillas en la mordaza. Utilice una razón de radio interior a radio exterior de 0.577, asumir un ángulo de almohadilla de 60º = 1, 0472 Rad , Suponga desgaste uniforme. Defina las suposiciones y las opciones de diseño. Especifique el material del freno, el radio exterior de la almohadilla, el radio interior de la almohadilla, y la fuerza aplicada requerida. Para resolver este ejercicio primero se calcula la aceleración con la cual el vehículo se detendrá, de un estudio cinemático se tiene que: a= V 2i 2 (X f − X i ) = (8,33 ms )2 2 (3,5m) = 9, 92 sm2 La fuerza requerida entre los neumáticos y el suelo es: Fw = W g a= El par requerido por los frenos es: T = d2w F w = 980N 9.81 m2 s 0.5080 m 2 (9, 92 sm2 ) = 991 N 991 N = 251, 72 N m Ahora se realizará el torque y la fuerza máxima que pueden desarrollar los frenos, esto mediante la ecuación 13 : T = θ 2 μ R1 P max (R2 2 − R1 2 ) Al utilizar la ecuación 15 y despejar R2 para se obtiene: R2 = [ 2T θ μ P max (f r −f 3r ) N ( 13) ] Para los datos de μ y P max se investigaron diversos resortes para los cuales uno de los materiales más comunes presenta las siguientes características: Coeficiente de fricción μ Presion maxima P max P a 0, 3 2070000, 00 Pastillas de freno sinterizadas R2 = [ 2 (251,72 N m) (1,0472) (0,3) ( 2070000 P a) ((0,5770)−(0,5770) 3 ) 4 ( 13) ] R2 = 0, 0795m Al hallar R2 se logra calcular R1 : R1 = 0.577R2 = 0.577 (0, 0795m) = 0, 0458m La fuerza que ejerce el freno: F = R1 P max θ(R2 − R1 ) = (0, 0458m) (2070000 P a) (1, 0472) (0, 0795m − 0, 0458m) F = 3345 N Y esta fuerza produce el siguiente torque de frenado: T =N μF (R2 +R1 ) 2 = (4) (0, 3)(3345 N ) ( 0,0795m+0,0458m ) 2 T = 251, 72 N m Cómo se logra observar que las fuerzas de frenado son superiores a las requeridas para frenar el vehiculo, tambien se puede obtener un tamaño del disco de la siguiente manera: T amaño del disco necesario = 2R2 = 2 * 0, 0795m = 15, 9 cm Lo que indica que el tamaño del disco de freno puede ser 160mm ya que es el diámetro que se encuentra en el mercado. Compartimiento Conductor Cinturón de tres puntos: Como su nombre indica, posee tres puntos de anclaje. Desde que Volvo liberó la patente en los años 50 (para que el resto de vehículos pudieran ser incorporados) ha sido el sistema más efectivo y usado de todos los conocidos, llegando hasta nuestros días. Estos dos tipos son los únicos homologados por la DGT para circular por las carreteras españolas. Figura 7. Cinturón de 3 puntos. Fuente: url Cinturón de cuatro puntos: La sujeción se centra en cuatro puntos (uno sobre cada uno de los hombros y los otros dos sobre las caderas). Es muy similar a los arneses de cinco puntos de competición (a veces también seis), pero sin punto de anclaje entre las piernas. Su uso no es legal en la circulación vial.[3] Figura 8. Cinturón de 4 puntos.Fuente:url Dispositivo de seguridad Hombre muerto Cuando una máquina necesita funcionar en un modo especial, a veces es necesario desactivar total o parcialmente los dispositivos de protección. En tales condiciones, los Sistemas de paro hombre muerto o interruptores habilitadores manuales, en conjunto con otras medidas de seguridad, sirven para proteger al operario ante situaciones peligrosas.[4] El dispositivo como tal consiste en un pedal situado en el suelo, para ser accionado o presionado con el pie, y frecuentemente también un par de botones a ambos lados de la cabina, que se pueden accionar o pulsar con la mano. El dispositivo deberá ser accionado cada cierto tiempo, ya sea con el pie o con la mano, para evitar que se active el frenado del tren. Así mismo, si el dispositivo es permanentemente presionado o pulsado, sin ser soltado cada cierto tiempo, puede ser indicativo también de una situación de peligro, por lo que el sistema actuaría de igual manera que cuando no se presiona o pulsa. En definitiva, la falta de accionamiento cada cierto tiempo o el accionamiento continuado sobre el dispositivo sin que sea liberado también cada cierto tiempo, son las condiciones que se utilizan para que el sistema actúe.[5] Figura 9. Funcionamiento del dispositivo Hombre Muerto Halo de protección No convencía a todos, pero fue la opción con menos detractores. El objetivo era lo único innegociable: proteger la cabeza de los pilotos, sobre todo tras el accidente que acabó con la vida de Jules Bianchi, fallecido en julio de 2015 como consecuencia de las secuelas que arrastraba desde el año anterior, cuando se empotró contra una grúa en el circuito de Suzuka y durante el Gran Premio de Japón. Como respuesta nació el Halo, una estructura de titanio en forma de 'T' ubicada en la parte superior del habitáculo y anclada al chasis de los monoplazas.[6] Figura 10. Infografía sobre el halo escogido por la escudería Mercedes en F1. Fuentei:u rl Aeroscreen La IndyCar pondrá a prueba el "parabrisas" para comprobar la visibilidad del piloto en condiciones de pleno sol, oscuridad y noche. La categoría siempre se ha mostrado a favor de este concepto por delante del sistema Halo que se utiliza en F1, debido a los problemas de visibilidad que podría provocar en los óvalos. El Presidente de competición y operaciones de la categoría, Jay Frye, ha declarado haber estado investigando crear una pieza de seguridad que además de cubrir su función, estéticamente luciera bien y funcionase en todas las condiciones. "Cualquier pieza que pongas en un Indy debe funcionar para diferentes condiciones de luz, tiene que ser muy versátil" declaró Frye. El prototipo ha sido probado en el túnel del viento de Dallara y en simulador. Durante el test de Rookies será la primera vez que veamos el aeroscreen. El material con el que se ha realizado esta nueva pieza es el mismo que se usa en la producción de cabinas de cazas. El director de ingeniería y seguridad de la categoría, Jeff Horton, juntamente con el Dr. Terry Trammell, consultor médico, han asegurado que el material se ha mostrado mucho más fuerte, ligero y resistente a los impactos que el anterior de policarbonato.[7] Figura 11. Aeroscreen monoplaza IndyCar Fuente:url Posición piloto F1 Los ingenieros trabajan sobre el fondo plano y áreas circundantes exprimiendo cada milímetro, porqué del enfoque utilizado dependen las prestaciones del conjunto en términos de downforce y equilibrio dinámico. Lógicamente, evitar el volumen de las piernas del piloto, al estar estas colocadas en posición casi horizontal dentro del habitáculo, supone una enorme ventaja pues amplía las posibilidades de modular el caudal de aire que pasa por debajo del morro, para llevarlo a la velocidad y presión adecuadas hacia el difusor, previo paso por la superficie lateral de los pontones.Esta utilización aerodinámica de la parte inferior del monoplaza lleva ya unos años instalada en la Fórmula 1. Adrian Newey (hoy en Red Bull), a su paso por Leyton House, conseguía aplicar por primera vez este concepto a finales de la década de los 80 del siglo pasado sobre el March 881, aunque en aquel momento, se puede decir que el piloto todavía iba «sentado» en el cockpit de su coche.Obviamente, la consecuente exploración de las enormes posibilidades que presentaba la aerodinámica inferior a lo largo de los años posteriores, ha ido definiendo un escenario en el que la posición del piloto, cada vez más tumbada, permitía por un lado bajar el centro de gravedad del vehículo, y por otro, facilitar la labor de los equipos de diseño de las escuderías, sacrificando eso sí, algo de comodidad —es justo reconocer que los pilotos nunca han conducido entre algodones—, en favor de ganar unas milésimas esenciales cuando se disputa la prueba.[8] Figura 12. posición piloto F1.fuente:u rl Matriz de Pugh Compartimiento Conductor Teniendo en cuenta los conceptos anteriores, se evaluó las posibles cabinas o compartimiento de conductor y se aplicó la siguiente matriz de Pugh. Figura 13. Matriz Pugh para el compartimiento del conductor. De la matriz de pugh, se sacan dos de cuatro conceptos de cabina, los cuales resultaron ganadores los conceptos 1 y 3 , teniendo en cuenta los criterios presentes en la matriz. Por lo tanto se escogió en el equipo que era mejor el concepto 1, teniendo en cuenta, los estudios realizados por los equipos de F1 donde el elemento del halo presta una mayor seguridad al piloto. Sistema de Transmisión: La tracción se define como un sistema para obtener el movimiento de un vehículo, por lo tanto, la tracción eléctrica se puede definir como la obtención del movimiento de un vehículo mediante el uso de la energía eléctrica, esto es, haciendo uso de motores eléctricos. El tipo de motor eléctrico más empleado en la tracción de automóviles eléctricos es el de corriente continua, ya que es fácil la regulación. La regulación puede ser clásica con resistencias, o por puente rectificador controlado. Esta última es electrónica y se emplea según el tipo de alimentación. La mayor desventaja de los motores de corriente continua es su elevado costo de mantenimiento. sin embargo, la tecnología hoy en día avanza a gran velocidad, creando motores con características técnicas muy interesantes aportando a los vehículos eléctricos. El motor integrado en la rueda aporta una disminución de espacio increíble contando que un motor eléctrico es más pequeño que uno de combustión pero el resto de componentes necesarios como la batería, el inversor y el resto de la electrónica hacen que su tamaño total sea similar. pero tiene una ventaja clara: su modularidad, puesto que no todo tiene que ir en el mismo lugar, se puede situar el motor en una de las ruedas permitiendo ganar espacio y distribuir mejor el restante de los componentes para que esté proporcione una gran autonomía al conductor. También añade simplicidad técnica, al eliminar la transmisión del par desde el motor a la rueda, con lo que su eficiencia puede lograr superar por un 30% respecto al motor eléctrico convencional y permitir mayor recuperación de energía en las frenadas regenerativas.[14] Para nuestro caso utilizaremos un motor eléctrico acoplado directamente a la rueda trasera de nuestro vehículo eléctrico de 3 llantas ya que dentro de los tipos de motores eléctricos este modelo es el más eficiente, menos pesado y nos brinda un ahorro de espacio. El motor eléctrico trabaja a 48V y 500w ya que las especificaciones las brinda la prueba. (Figura 13). Figura 13. Motor Eléctrico en el buje. [https://www.bikelec.es/blog/motor-central-vs-motor-rueda/] Figura 14. Estructura interna del motor eléctrico en el buje. [h ttp://www.enbicielectrica.com/t4182-desmontar-motor-mxus-250-w-para-engrasar-engranajes] . El motor eléctrico ubicado en el buje de la rueda de 48V-500W ofrece una velocidad promedio de 35 km/h con un empuje de 80 Nm. El par motor es el momento de fuerza que el motor ejerce sobre el eje de transmisión de potencia. El torque es la fuerza aplicada en una palanca que haga rotar alguna pieza. Por ejemplo al subir una pendiente con la bici debemos realizar una determinada fuerza sobre los pedales, esa fuerza multiplicada por la distancia de la biela, produce un momento de fuerza sobre o par motor el eje. Cuando se desarrolla una potencia en un sistema mecánico, se busca un punto de equilibrio entre el par motor y el par resistente, para el ciclista el par resistente está formado por el rozamiento de la rueda contra el suelo, de nuestro cuerpo contra el aire, la cadena en los cambios. La velocidad máxima de la bicicleta siempre estará limitada a la fuerza máxima que seamos capaces de ejercer sobre el pedal multiplicado por la longitud de la biela resultando el par motor o torque máximo. Ruedas: Cubierta: - Tubular Ventajas: Fáciles de montar Prácticas en caso de pinchazo Económicas Desventajas Comodidad en el andar Peso ya que las ruedas son más resistentes y pesadas - Ventajas: Comodidad Menos peso Control de dirección ante un pinchazo Desventajas Facilidad para encolar Practicidad en caso de pinchazo en ruta Costosas - Figura 15. Tipos de llantas Apretados: Funcionan bien en terrenos compactos y duros. Ya que tendrá muchos tacos juntos que dan más superficie de contacto. Separados: Al tener tacos más separados entre ellos son mejores para terrenos mojados, lodosos, o terrenos con piedra suelta, ya que los tacos separados evacuan o sacan el exceso del barro Agresivo medio: Los tacos se verán sobresalientes en la llanta. Son grandes y largos. Dan mejor agarre en terrenos con abundante tierra suelta, así como en barro. Medio a pequeño: El taqueado pequeño nos dará menor fricción, por lo tanto en terreno duro o seco rodarán más rápido; inclusive en la mayoría de los terrenos. Figura 16. Grabado o dibujo de la llanta (cubierta) Semi-Slicks: mezcla de taqueado usando tanto el agresivo como el pequeño. Esta combinación de tacos se le conoce como semi-slicks. Lo primero que se tiene en cuenta en el momento de seleccionar el tipo de llanta es el terreno sobre el cual van a rodar si es liso, compacto, duro, lodoso, tierra suelta, barro; una vez se tiene claro esto, se busca ganar velocidad por lo que se deben tener en cuenta algunos elementos como: el grabado de la llanta, las especificaciones, y la presión del neumático. El valor que nos indica esto se llama coeficiente de resistencia a la rodadura (Crr), el cual es uno de los aspectos al que se le dedica más tiempo en el momento de diseñar las cubiertas para las bicicletas bien sea para carretera, ciudad, montaña, esto con el objetivo de reducir la resistencia al rodaje con el fin de reducir el esfuerzo en el pedaleo y aumentar la velocidad. Lo primero que se piensa, es que el tipo de grabado que tenga la llanta sea totalmente liso, para que tenga la menor resistencia a la rodadura, sin embargo, el grabado es importante no solo para el agarre, sino también para ofrecer seguridad en cualquier condición climatológica. Por lo que según estudios muestran que lo más importante es reducir la deformación del neumático en la que intervienen la presión de la llanta, el peso de la bicicleta y del ciclista, porque cuanto más se deforma, más superficie de contacto genera y supone más rozamiento con el terreno [10]. Se procura entonces que el coeficiente de resistencia a la rodadura (Crr) sea el más bajo posible según el tipo de llanta seleccionado, como se mencionó antes se debe procurar que la presión a la que está circulando sea la correcta, no existe alguna fórmula precisa para saber a qué presión inflar las llantas. También se debe tener en cuenta que, si está circulando a una presión más baja de la que se requiere, se incrementa el coeficiente de resistencia y el fenómeno de la deformación de la cubierta del neumático, ahora si se tiene demasiada presión en las ruedas, se incrementa el desgaste en la superficie de rozamiento, y se pierde comodidad en la marcha. En todo caso por ningún motivo se deben inflar por encima de las recomendaciones del fabricante y que por norma general se ven impresas, a un lado con las medidas y características de la misma. [10] Figura 19. Relación entre Crr y anchura del neumático El coeficiente de resistencia a la rodadura de un neumático de 23 mm inflado a 100 PSI es el mismo que el de una cubierta de 25 mm inflado a 80 PSI; Con una mayor sección de cubierta se mantiene la resistencia a la rodadura, pero aumentando en gran medida la comodidad. Teniendo en cuenta la teoría, y las condiciones del terreno sobres las que va rodar el vehículo el cual se prevé que es compacto y duro, la rueda será de tipo cubierta con un grabado de taco apretado, así mismo para la selección del diámetro de la rueda es importante recordar las ventajas que trae el tener el centro de masa cercano al piso. - Para las ruedas delanteras se seleccionaron, unas llantas phantom GW de 20 pulgadas, con un grabado de taco apretado ideales para terrenos compactos y duros, que permiten tener tener buena superficie de contacto con el suelo. Figura 20. Rueda phantom - - Además, teniendo en cuenta que el vehículo necesita soportar carga axial, se deben adaptar las llantas delanteras para instalar un buje con un diámetro interior ideal de pulgada y media, que nos permite colocar un eje más robusto en comparación con el que viene instalado en la llanta original que está diseñada para soportar carga transversal así mismo se optó por colocar rodamiento de bolas que son muy usados, siendo capaces de soportar cargas axiales y transversales. Figura 21. Rodamiento de bolas Sistema de dirección: Su función principal es dirigir la orientación de las ruedas, para realizar el trazado en las curvas y las maniobras tanto en bajas como en altas velocidades, para ello se utilizan una serie de elementos que transmiten el movimiento del volante hasta las ruedas.[1] Figura 22. Partes del sistema de dirección. Fuente: (Luque et al., 2008) Geometría de la dirección: La alineación de la dirección de un vehículo es la condición geométrica que deben cumplir todas las partes que afectan la dirección para determinar la posición de las ruedas en movimiento sobre el terreno, ya sea en línea recta o en curva. Para que la dirección funcione adecuadamente, es necesario que todos los elementos que la conforman cumplan con la condición conocida como cotas de dirección o geometría de dirección, con las cuales se logra que las ruedas obedezcan fácilmente al movimiento del volante y no se altere su orientación por las irregularidades del terreno o al frenar, logrando una dirección segura.[12] Las cotas que determinan la geometría del sistema de dirección son: · Ángulo de salida (King - Pin) As · Ángulo de avance (Caster) Ac Figura 23. Cotas de la geometría de la dirección. Fuente: (Luque et al., 2008) Ángulo de salida (As): Es el ángulo que forma el eje de la articulación de la mangueta con el plano vertical, visto desde el frente del vehículo. Este ángulo generalmente suele estar comprendido entre 5 y 10º, siendo en la mayoría de los vehículos de 6 a 7º; esta inclinación del pivote reduce el esfuerzo a realizarse para la orientación de la rueda, ya que depende directamente de la distancia “d” (Figura 24). Cuanto menor sea “d” menor será el esfuerzo que realizar con el volante. Este esfuerzo será nulo cuando el eje del pivote pase por el punto “A”, centro de la superficie de contacto del neumático con el suelo. En este caso solo habría que vencer el esfuerzo de resistencia de rodadura (Fr) correspondiente al ancho del neumático, ya que el par de giro sería nulo. En la práctica “d” no puede ser cero ya que, entonces la dirección se volvería inestable.[12] Figura 24. Ángulo de salida y sus efectos sobre la orientación de las ruedas. Fuente: (Luque et al., 2008) Ángulo de avance (Ac): Es el ángulo formado por el eje de pivote de la mangueta con el plano vertical del eje de la rueda, visto el vehículo lateralmente. Se justifica por la necesidad de tener un par resistente para estabilizar las ruedas direccionales, (véase la Figura 26) si el ángulo de avance es grande, el par creado también lo es, haciendo que las ruedas se orienten violentamente. Si el ángulo es pequeño o insuficiente, el par de orientación también lo es, dando como resultado una dirección inestable. Un avance positivo (Figura 26), estabilizará las ruedas directrices en el caso de frenada, teniendo en cuenta que es el caso más desfavorable, ya que los esfuerzos de tracción son habitualmente inferiores. El ángulo de avance suele estar comprendido entre 0 y 4º para vehículos con motor delantero; y de 6 a 12º para vehículos con motor trasero.[12] Figura 25. Ángulo de avance y sus efectos sobre la orientación de las ruedas. Fuente: (Luque et al., 2008) Figura 26. Sentidos positivo y negativo del Ángulo de avance. Fuente: (Luque et al., 2008) Geometría de Ackerman: Es una condición geométrica la cual explica que, al momento de tomar una curva, la rueda delantera interna del vehículo recorra menos camino que la externa, ya que el radio de las trayectorias recorridas es diferente y giran en ángulos distintos, haciendo un giro correcto con el fin de que el vehículo pueda girar sin que se produzcan deslizamientos o arrastre en las ruedas; todas las ruedas que giran, deben coincidir en un mismo centro de rotación (ver Figura 27), permitiendo un mejor control y disminuyendo el desgaste de las ruedas; regularmente se emplea un sistema que consta de dos manguetas articuladas a un eslabón central o pivote, cuyo movimiento está controlado por el volante.[12] Figura 27. Geometría de la dirección y cuadrilátero de Ackermann. Fuente: (Luque et al., 2008) Ackermann neutro: La dirección se configura de tal manera que las prolongaciones de las líneas del ángulo de los puntos de giro de los brazos de dirección se interceptan justo en la línea de acción del eje trasero. Con esta geometría de la dirección, se consigue que no haya ángulo de convergencia en la rueda interior, la rueda está alineada con la circunferencia del círculo; (Burnhill, 2009).[12] Figura 28. Ackermann neutro. Fuente: (h ttp://www.rctek.com/technical/handling/images/ackerman_steering_principle_true.png) Ackermann positivo: La dirección se configura de tal manera que las prolongaciones de las líneas del ángulo de los puntos de giro de los brazos de dirección se interceptan delante de la línea central del eje trasero. Esta geometría de la dirección consigue una mayor desigualdad angular de las ruedas, lo que resulta que la rueda interior trata de seguir un círculo de diámetro más pequeño de lo que realmente hace; (Burnhill, 2009).[12] Figura 29. Ackermann positivo. Fuente: (http://www.rctek.com/technical/handling/images/ackerman_steering_principle_more .png) Ackermann negativo: La dirección se configura de tal manera que las prolongaciones de las líneas del ángulo de los puntos de giro de los brazos de dirección se interceptan detrás de la línea central del eje trasero. Esta geometría de la dirección alcanza una cantidad reducida de la desigualdad angular de las ruedas, dando como resultado que la rueda interior trata de seguir un círculo de diámetro más grande de lo que realmente hace; (Burnhill, 2009).[12] Figura 30. Ackermann negativo. Fuente: (h ttp://www.rctek.com/technical/handling/images/ackerman_steering_principle_less.png) Radio de giro: Es la capacidad que tiene el vehículo de girar las ruedas, cuanto más corto es el radio de giro de un vehículo se dice que éste ofrece mejor maniobrabilidad; no obstante, entre más consiga girar sus llantas hacia los lados, dará las vueltas más cerradas y en menos espacio. El radio de giro depende directamente de la geometría de Ackerman, y de varios parámetros como los elementos del vehículo, la distancia entre los ejes, tamaño de brazos de dirección, ancho de llantas, entre otros. (Ver figura 31).[12] Figura 31. Radio máximo de giro. Fuente: (Reza N, 2008) Suspensión: Se determinó necesaria la instalación de un sistema de suspensión para nuestro vehículo por 2 motivos: ● La primera razón se basa en reducir al máximo posible el esfuerzo torsional que ocurre en el eje longitudinal del chasis al momento del manejo del vehículo, en instantes como al girar, frenar o sobrepasar obstáculos, en los cuales se generan diferentes reacciones de carga en las ruedas que pueden ocasionar el torque deformador [13]. ● La segunda razón se caracteriza en disminuir el efecto de las cargas que el vehículo tiene que soportar en su chasis, por ejemplo, componentes de peso como el del piloto, el motor, la batería, y el propio peso de la estructura del vehículo, con el objetivo de no llegar a sobredimensionar la estructura del chasis, esto debido a que mientras más masa, mayor rigidez, pero esto incurre también en el avance del vehículo, haciendo que este decrece. Figura 32. Chasis torcido bajo efecto de diferentes cargas en las ruedas [13] Chasis: De acuerdo con el planteamiento de la condición de Ackerman anteriormente planteado, se trazó el triángulo de Ackerman para el chasis utilizando un equilibrio neutro, positivo y negativo (ver figura 33). Figura 33. Triángulo de ackerman en chasis con equilibrio neutro, positivo y negativo Se decidió trabajar con un ackerman neutro con una inclinación de las ruedas de aproximadamente 30° y un radio de giro de 2.3 m (ver figura 34 y 35). Figura 34. Triángulo de ackerman en chasis ruedas rectas vista superior Figura 35. Triángulo de ackerman en chasis ruedas inclinadas 30° vista superior Teniendo en cuenta los conceptos anteriores, se evaluó las posibles materiales para la fabricación del chasis aplicando la matriz de Pugh a tres materiales diferentes (ver figura 36). Figura 36. Matriz Pugh para materiales del chasis. De la matriz de Pugh, se aplicaron tres tipos de materiales, de los cuales resultó ganador el concepto 3 , teniendo en cuenta los criterios presentes en la matriz. Por lo tanto se escogió en el equipo que era mejor el material #3 acero al carbono A36 por economía y rigidez, procurando el diseño de la estructura más liviana posible. Además se definió que el vehículo tendrá una transmisión por motor eléctrico en adosado a una rueda y en adición a esto, para salvar las condiciones del terreno tendrá suspensión el tren delantero y en la zona posterior, conformando así un vehículo de tres ruedas, siendo la rueda trasera aquella que transmite la potencia. Bajo el esquema de Ackerman y los requerimientos de suspensión, se generó un elemento central principal tipo viga en tubo estructural redondo el cual es el encargado de llevar la carga del piloto; en la zona posterior se acopló el soporte de la rueda trasera conectado con un soporte giratorio tipo buje y un amortiguador tipo resorte, y en la zona delantera, se configuró una suspensión de doble horquilla también con amortiguadores tipo resorte (ver Figura 37 y 38). Figura 37. Suspensión de doble horquilla. Figura 38. Suspensión trasera. BIBLIOGRAFÍA [1] PATIÑO MOLINA, FRANKLIN JULIAN. “Diseño y construcción de un vehículo de tracción humana para la competencia Uniandes 2011,” Universidad Pontificia Bolivariana (UPB). Bucaramanga. Colombia. Informe técnico. [en línea]. Consultado el 25 de marzo de 2019. Disponible en: http://biblioteca.upbbga.edu.co/docs/digital_22747.pdf [2] OBANDO A, A. ALARCÓN RICHARD, R. SÁNCHEZ AUGUSTO, C. SAMPAYO HARLAM, C. TERÁN PÁJARO, C. PAJARO VILORIA, D. OTERO HERRERA, L. CERVANTES OLIVEROS, L. BALDOVINO DE CASTRO, L. GUEVARA TORRES, A. VARGAS BUSTAMANTE, J. CAMPO ESCUDERO, LUIS. Vehículo de tracción humana. Universidad del Atlántico (UT). Barranquilla. Colombia. reporte técnico. [en línea]. consultado el 25 de marzo de 2019. Disponible en: https://www.academia.edu/9709248/VEH%C3%8DCULO_DE_TRACCI%C3%93N_HUMAN A [3] “¿Cuántos tipos de cinturón de seguridad existen?” [Online]. Disponible en: https://www.cosasdecoches.com/cuantos-tipos-de-cinturon-de-seguridad-existen/. [Accedido: 25-Mar-2019]. [4]“Sistemas de paro hombre muerto - Electrónica - Sistemas de paro hombre muerto.” [Online]. Disponible en: https://www.interempresas.net/Electronica/FeriaVirtual/Producto-Sistemas-de-paro-hombremuerto-33629.html. [Accedido: 25-Mar-2019]. [5] “Patentes y Seguridad ferroviaria: el dispositivo de ‘Hombre Muerto’ | Patentes y Marcas.” . [6] A. N. MORENO, “El Halo trae de cabeza a la Fórmula 1,” El País, Madrid, 27-Feb-2018. [7] “La IndyCar apuesta por el Aeroscreen,” revistasafetycar.com. [Online]. Disponible en: http://www.revistasafetycar.com/indycar/noticia/la-indycar-apuesta-por-el-aeroscreen-42481. [Accedido: 25-Mar-2019]. [8] “Conducir tumbado. Una exigencia en Fórmula 1,” Diariomotor. [En línea]. Disponible en: https://www.diariomotor.com/2013/04/06/conducir-tumbado-una-exigencia-en-formula-1/. [Accedido: 27-Mar-2019]. [9] “Sobre la anchura de llantas y cubiertas”, Mavic, 2019. [En línea]. Disponible en: https://engineerstalk.mavic.com/es/sobre-anchura-de-llantas-y-cubiertas/ [Accedido: 27-marzo-2019] [10] “Neumáticos, sección y presión de inflado”, Ciclismo a fondo, 2019. [En línea]. Disponible en: https://www.ciclismoafondo.es/reportajes-ciclismo/articulo/todo-sobre-ruedas-bici-carretera [Accedido: 27-marzo-2019] [11] “Shell Eco-Marathon. 2019 Official rules Chapter 1”, [En línea]. Disponible en: https://www.shell.com/make-the-future/shell-ecomarathon/americas/for-americas participants/_jcr_content/par/textimage.stream/1535931413222/90098d1f7999992844eca98 3131f10a1aa95ad5327339dd0765799426bcb1e8/shell-eco-marathon-2019-global-rules-cha pter-1. df. [Accedido: 27-marzo-2019] [12] CHAMBA, F., JARAMILLO., D. (2016). “Sistema de dirección y frenos para vehículo de competencia Shell Eco Marathon”. UNIVERSIDAD DEL AZUAY FACULTAD DE CIENCIA Y TECNOLOGÍA ESCUELA DE INGENIERÍA MECÁNICA AUTOMOTRIZ. [13] B. LUCAS, S. ADRIANO, S. M. MARIO EDUARDO, A. B. ALEXANDRE. Formula SAE Chassis Design to Improve Suspension Tuning. [En línea] Researchgate (octubre de 2016). consultado el día 18 de abril de 2019 . Disponible en: https://www.researchgate.net/publication/312046702_Formula_SAE_Chassis_Design_to_Im prove_Suspension_Tuning [14] Criado, Carlos. Motor eléctrico en rueda [En línea] movilidadelectrica.com (23 de abril de 2013). consultado el dia 26 de marzo de 2019. Disponible en: https://movilidadelectrica.com/motor-electrico-en-rueda/