PONTIFICIA UNIVERSIDAD CATÓLICA DEL ECUADOR
FACULTAD DE INGENIERÍA
ESCUELA DE CIVIL
ANÁLISIS DINÁMICO DE ESTRUCTURAS
NOVENO NIVEL
SISTEMA CONSERVATIVO EN VIBRACIÓN LIBRE
ESTUDIANTES:
Andreína Damián
Emily Murillo
QUITO, 2019
Tabla de contenido
Ejercicio No. 1 ..............................................................................................................................1
Desarrollo .................................................................................................................................1
Comprobación ..........................................................................................................................3
Ejercicio No. 2 ..............................................................................................................................5
Desarrollo .................................................................................................................................5
Comprobación ..........................................................................................................................7
Ejercicio No. 3 ............................................................................................................................10
Desarrollo ...............................................................................................................................10
Comprobación: .......................................................................................................................13
Ejercicio No. 4 ............................................................................................................................14
Desarrollo ...............................................................................................................................14
Comprobación: .......................................................................................................................18
Ejercicio No. 5 ............................................................................................................................19
Desarrollo ...............................................................................................................................19
Comprobación: .......................................................................................................................21
Bibliografía .................................................................................................................................23
II
Ejercicio No. 1
Desarrollo
Determinar la Ecuación del Equilibrio Dinámico, la frecuencia angular y el periodo del siguiente
sistema. Despreciar la masa del sistema. (Paz & Leight, 2004, pág. 23)
Para iniciar el ejercicio planteamos el diagrama de cuerpo libre de la masa M. Es necesario tomar en
cuenta la rigidez de la barra por lo que deberemos obtener el coeficiente de rigidez de la barra para
poder plantear la relación (kb). Entonces se obtendrá este coeficiente de rigidez a través del método
de la rigidez.
Planteamos sumatoria de fuerzas:
↓+ ∑ 𝐹𝑦 = 𝑚 × 𝑥̈
−𝑘𝑥 − 𝑘𝑥 − 𝑘𝑏 𝑥 + 𝑚𝑔 = 𝑚 × 𝑥̈
1
1
× 𝑚𝑥̈ + (2𝑘 + 𝑘𝑏 )𝑥 = 𝑚𝑔 ×
𝑚
𝑚
𝑥̈ +
(2𝑘 + 𝑘𝑏 )
𝑥=𝑔
𝑚
𝐸𝑐. 1
Es necesario determinar el coeficiente kb, lo determinaremos mediante el método de la rigidez.
{𝑄} = [𝐾𝑄𝑄] × {∆𝑄} + {𝐹𝐸𝑃}
{∆𝑄} = [𝐾𝑄𝑄]−1 × (−{𝑄} + {𝐹𝐸𝑃})
{𝐹𝐸𝑃} = 0 debido a que no existen fuerzas de vano.
{∆𝑄} = [𝐾𝑄𝑄]−1 × −{𝑄}
1
Planteamos los grados de libertad.
Con ello buscamos los coeficientes para armar la matriz KQQ
𝑘11 =
𝑘12 =
12 𝐸𝐼
𝐿3
6 𝐸𝐼
− 2
𝐿
6 𝐸𝐼
𝑘21 = − 2
𝐿
4 𝐸𝐼
𝑘22 =
𝐿
12
1 𝐿3
{∆𝑄} = [
6
𝐸𝐼
− 2
𝐿
6 −1
𝐿2 ] × − [𝑚 × 𝑔]
4
0
𝐿
−
𝑚𝑔𝐿3
{∆𝑄} = 3𝐸𝐼2
𝑚𝑔𝐿
[ 2𝐸𝐼 ]
Entonces el coeficiente que nos interesa es el ∆𝑄1, del principio de la Ley de Hooke, donde k es la
rigidez que necesito para mi ejercicio, y F es la fuerza actuante que en este caso por ser vibración
libre es el peso de la masa.
𝐹 = 𝑘𝑥
𝑘𝑏 =
𝐹
𝑚𝑔
3𝐸𝐼
=
= 3
3
𝑚𝑔𝐿
∆𝑄1
𝐿
3𝐸𝐼
Reemplazando el valor de k b en la Ec. 1
2
𝑥̈ +
3𝐸𝐼
)
𝐿3 𝑥 = 𝑔
𝑚
𝑥̈ +
2𝑘𝐿3 + 3𝐸𝐼
𝑥=𝑔
𝑚𝐿3
(2𝑘 +
Arreglando la expresión
De la expresión general de la Ecuación de Equilibrio Dinámico, sabemos que el término que
acompaña a la variable x es el periodo angular al cuadrado.
2𝑘𝐿3 + 3𝐸𝐼
𝜔=√
𝑚𝐿3
𝑇=
2𝜋
=
𝜔
2𝜋
3
√2𝑘𝐿 +33𝐸𝐼
𝑚𝐿
Comprobación
Ilustración 1-Ejercicio No. 1 (Paz & Leight, Structural Dynamics, 2004, pág. 23)
Para la comprobación desarrollaremos el ejercicio desde otro sistema de referencia, con esto el
valor de la frecuencia angular debe dar exactamente el mismo.
3
𝑥̈ +
2𝑘𝐿3 + 3𝐸𝐼
𝑥=𝑔
𝑚𝐿3
𝑥𝑠 = 𝑥 + 𝑥; 𝑥̈ = 𝑥̈ 𝑠
Sabemos que en 𝑥𝑞 es el punto de equilibrio del sistema, es decir, que en este punto las fuerzas se
igualan porque se da un equilibrio estático. Entonces:
2𝑘𝑥𝑞 + 𝑘𝑏 𝑥𝑞 = 𝑚𝑔;
3𝐸𝐼
𝑘𝑏 = 3
𝐿
𝑚𝑔
𝑥𝑞 =
2𝑘𝐿3 + 2𝐸𝐼
𝐿3
Reemplazamos lo obtenido en la ecuación del equilibrio dinámico
𝑥̈ +
𝑥̈ 𝑠̈ +
𝑥𝑠̈ −
𝑥𝑠̈ −
2𝑘𝐿3 + 3𝐸𝐼
𝑥=𝑔
𝑚𝐿3
2𝑘𝐿3 + 3𝐸𝐼
(𝑥𝑞 − 𝑥𝑠 ) = 𝑔
𝑚𝐿3
2𝑘𝐿3 + 3𝐸𝐼
2𝑘𝐿3 + 3𝐸𝐼
𝑥
+
𝑥𝑞 = 𝑔
𝑠
𝑚𝐿3
𝑚𝐿3
2𝑘𝐿3 + 3𝐸𝐼
2𝑘𝐿3 + 3𝐸𝐼
𝑚𝑔
𝑥
+
×
=𝑔
𝑠
3
3
3
2𝑘𝐿 + 2𝐸𝐼
𝑚𝐿
𝑚𝐿
𝐿3
Simplificando la ecuación:
𝑥𝑠̈ −
2𝑘𝐿3 + 3𝐸𝐼
𝑥𝑠 + 𝑔 = 𝑔
𝑚𝐿3
𝑥𝑠̈ −
2𝑘𝐿3 + 3𝐸𝐼
𝑥𝑠 = 0
𝑚𝐿3
4
De la expresión general de la Ecuación de Equilibrio Dinámico, sabemos que el término que
acompaña a la variable x es el periodo angular al cuadrado.
2𝑘𝐿3 + 3𝐸𝐼
𝜔=√
𝑚𝐿3
Obtenemos la misma frecuencia angular comprobando el ejercicio.
Ejercicio No. 2
Desarrollo
Determine la frecuencia angular para el desplazamiento horizontal del marco de acero. Suponga
que la viga horizontal es infinitamente rígida y desprecie la masa de las columnas. (Paz & Leight,
2004, pág. 24)
Para hallar el desplazamiento Δ1 utilizamos el método de la rigidez y con ello hallar la rigidez de
cada una de las columnas. Para la columna empotrada-articulada se utilizará el coeficiente ya
obtenido en el ejercicio anterior:
𝑘1 =
𝐹
𝑚𝑔
3𝐸1 𝐼1
=
= 3
3
𝑚𝑔𝐿
∆𝑄1
𝐿
3𝐸𝐼
Mientras que para la columna empotrada-empotrada se deberá obtener la rigidez, que se lo
realizará mediante el método de la rigidez. Como solo tendrá el grado de libertad dinámico solo
deberemos plantear un solo desplazamiento.
Como solo existe un grado de libertad entonces solo existiría 𝑘11 =
12 𝐸𝐼
𝐿3
{∆𝑄} = [𝐾𝑄𝑄]−1 × −{𝑄}
12 𝐸𝐼 −1
𝑚𝑔𝐿3
∆𝑄 = ( 3 ) × −𝑚𝑔 =
𝐿
12 𝐸𝐼
𝑘2 =
𝐹
𝑚𝑔
12𝐸2 𝐼2
=
=
∆𝑄1 𝑚𝑔𝐿3
𝐿3
12𝐸𝐼
Para plantear la ecuación utilizaremos un diagrama de resortes.
5
Por tanto, la ecuación:
→+ ∑ 𝐹𝑦 = 𝑚 × 𝑥̈
−𝑘1𝑥 − 𝑘1𝑥 − 𝑘2𝑥 = 𝑚 × 𝑥̈
1
1
× 𝑚𝑥̈ + (2𝑘1 + 𝑘2)𝑥 = 0 ×
𝑚
𝑚
𝑥̈ +
(2𝑘1 + 𝑘2)
𝑥=0
𝑚
𝐸𝑐. 1
Reemplazamos los valores de k1 y k2:
(2 ×
𝑥̈ +
𝑥̈ +
3𝐸1 𝐼1 12𝐸2 𝐼2
+
)
𝐿3
𝐿3
𝑥=0
𝑚
6𝐸1 𝐼1 + 12𝐸2 𝐼2
𝑥=0
𝑚𝐿3
De la expresión general de la Ecuación de Equilibrio Dinámico, sabemos que el término que
acompaña a la variable x es el periodo angular al cuadrado.
𝜔=√
𝑓=
6𝐸1 𝐼1 + 12𝐸2 𝐼2
𝑚𝐿3
𝜔
1
6𝐸1 𝐼1 + 12𝐸2 𝐼2
=
×√
2𝜋 2𝜋
𝑚𝐿3
Según el manual ASCI (perfiles metálicos)
𝑓=
1
6(21)(3400) + 12(21)(1200)
×√
2𝜋
(25000)(400)3
𝑓 = 3.367 × 10−3 𝑐𝑝𝑠
6
Comprobación
Ilustración 2-Ejercicio No. 2 (Paz & Leight, Dinámica Estructural, 1992, pág. 20)
7
Ilustración 3-Respuesta (Paz & Leight, Dinámica Estructural, 1992, pág. 631)
8
Como podemos ver el valor del resultado no se obtiene pero se demuestra que cambiando el
sistema de referencia se puede obtener la misma frecuencia angular.
𝑥𝑠 = 𝑥 + 𝑥; 𝑥̈ = 𝑥̈ 𝑠
Sabemos que en 𝑥𝑞 es el punto de equilibrio del sistema, es decir, que en este punto las fuerzas se
igualan porque se da un equilibrio estático. Entonces:
−𝑘1𝑥 − 𝑘1𝑥 − 𝑘2𝑥 = 0
3𝐸𝐼
12𝐸𝐼
𝑘1 = 3 ; 𝑘2 = 3 ;
𝐿
𝐿
𝑥𝑞 = 0
Reemplazamos lo obtenido en la ecuación del equilibrio dinámico
𝑥̈ 𝑠 +
𝑥̈ 𝑠̈ +
𝑥𝑠̈ −
(2𝑘1 + 𝑘2)
𝑥𝑠 = 0
𝑚
(2𝑘1 + 𝑘2)
(𝑥𝑞 − 𝑥𝑠 ) = 0
𝑚
(2𝑘1 + 𝑘2)
(2𝑘1 + 𝑘2)
𝑥𝑠 +
𝑥𝑠 = 0
𝑚
𝑚
𝑥𝑠̈ −
(2𝑘1 + 𝑘2)
𝑥𝑠 = 0
𝑚
Reemplazando los coeficientes
𝑥𝑠̈ −
6𝐸1 𝐼1 + 12𝐸2 𝐼2
𝑥𝑠 = 0
𝑚𝐿3
𝑥𝑠̈ −
6𝐸1 𝐼1 + 12𝐸2 𝐼2
𝑥𝑠 = 0
𝑚𝐿3
De la expresión general de la Ecuación de Equilibrio Dinámico, sabemos que el término que
acompaña a la variable x es el periodo angular al cuadrado.
9
𝜔=√
6𝐸1 𝐼1 + 12𝐸2 𝐼2
𝑚𝐿3
Obtenemos la misma frecuencia angular comprobando el ejercicio y detectando algún tipo de falla
en el tipeo del ejercicio por causa de la traducción.
Ejercicio No. 3
Desarrollo
Dos barras uniformes, cada una de peso m = 12 kg y longitud L = 800 mm, se sueldan entre sí para
formar el ensamble mostrado. Si la constante de cada resorte es k = 500 N/m y al extremo A se le
da un pequeño desplazamiento y se suelta, determine la frecuencia del movimiento resultante.
(Beer, Jhonston, & Conrwell, 2010, pág. 1239)Ejercicio 19.57.
Se plantea el Diagrama del cuerpo libre:
10
← ∑ 𝑀𝑜 = 𝐼𝑜 × 𝜃̈
+
−𝑚𝑔 ×
𝐿
𝐿
𝐿
− 𝑘 × ∆ × − 𝑘∆ × = 𝐼𝑜 × 𝜃̈
2
2
2
Es necesario determinar la inercia polar del sistema. Se calcula la inercia polar de la barra vertical y
después la de la barra horizontal:
Inercia Polar barra vertical
𝑚 = á𝑟𝑒𝑎 × 𝑑𝑒𝑛𝑠𝑖𝑑𝑎𝑑 = 𝑏 × 𝐿 × 𝜌
𝑑𝑚 = 𝑏 × 𝜌 × 𝑑𝑟
𝐼𝑜 = ∫ 𝑟 2 𝑑𝑚
𝐿
𝐼𝑜 = ∫ 𝑟 2 𝑑𝑚 = 𝑏 × 𝜌 ∫ 𝑟 2 𝑑𝑚
0
𝐿
𝑟3
𝐿3
𝐼𝑜 = 𝑏 × 𝜌 [ ] = 𝑏𝜌
3 0
3
Como
𝑚 = 𝑏𝐿𝜌
𝑚𝐿2
𝐼𝑜 =
3
Inercia Polar barra horizontal
𝐼𝑜 = ∫ 𝑟 2 𝑑𝑚
𝐿/2
𝐿/2
𝐿/2
𝑟3
𝑟 2 𝑑𝑚 = 𝑏 × 𝜌 [ ]
3 −𝐿/2
−𝐿/2
𝐼𝑜 = 𝑏 × 𝜌 ∫
𝐿 3
𝐿 3
( )
(− )
2 ]
= 𝑏 ×𝜌[ 2 −
3
3
−𝐿/2
𝐼𝑜 = 𝑏 × 𝜌 × [
𝐿3 𝐿3
𝐿3
+ ] = 𝑏𝜌
24 24
12
Como
11
𝑚 = 𝑏𝐿𝜌
𝐼𝑜 =
𝑚𝐿2
12
Por lo tanto, la inercia del sistema es
𝑚𝐿2 𝑚𝐿2
5
𝐼𝑜 =
+
=
𝑚𝐿2
3
12
12
Una vez determinada la inercia polar del sistema se igual a la sumatoria de momentos en el eje o:
← ∑ 𝑀𝑜 = 𝐼𝑜 × 𝜃̈
+
𝐿
𝐿
𝐿
5
−𝑚𝑔 × − 𝑘 × ∆ × − 𝑘∆ × =
𝑚𝐿2 × 𝜃̈
2
2
2 12
𝐿
∆= 𝜃
2
𝐿
𝐿
𝐿
𝐿
𝐿
5
−𝑚𝑔 × 𝜃 − 𝑘 × 𝜃 × − 𝑘 × 𝜃 × =
𝑚𝐿2 × 𝜃̈
2
2
2
2
2 12
𝐿
𝐿2
5
𝑚𝑔 × 𝜃 − 𝑘 × 𝜃 =
𝑚𝐿2 × 𝜃̈
2
2
12
5
𝐿2
𝐿
( 𝑚𝐿2 ) 𝜃̈ + (𝑘 − 𝑚𝑔 ) 𝜃 = 0
12
2
2
𝜃̈ +
𝐿2
𝐿
− 𝑚𝑔 )
2
2
𝜃=0
5
( 𝑚𝐿2 )
12
(𝑘
6𝑘 6𝑔
𝜃̈ + (
− ) 𝜃=0
5𝑚 5𝐿
6𝑘 6𝑔
𝜔 = √(
− )
5𝑚 5𝐿
6 × 500 6 × 9.81
𝜔 = √(
−
) = 5.94 𝑟𝑎𝑑⁄𝑠
5 × 12
5 × 0.8
𝑓=
𝜔
5.94
=
2𝜋
2𝜋
𝑓 = 0.945 𝐻𝑧
12
Comprobación:
Ilustración 4-Respuesta (Beer, Jhonston, & Conrwell, 2010)
13
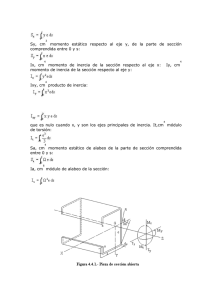
Ejercicio No. 4
Desarrollo
Una placa cuadrada uniforme está suspendida de un pasador localizado en el punto medio A de uno
de sus bordes de 1.2 ft y se encuentra unida a resortes, cada uno de constante k = 8 lb/in. Si a la
esquina B se le da un pequeño desplazamiento y se suelta, determine la frecuencia de la vibración
resultante. Suponga que cada resorte puede actuar en tensión o en compresión. (Beer, Jhonston, &
Conrwell, 2010, pág. 1239)Ejercicio 19.56
Se plantea el Diagrama del cuerpo libre:
← ∑ 𝑀𝑜 = 𝐼𝑜 × 𝜃̈
+
𝐿
−𝑚𝑔 × 𝜃 − 𝑘𝑥 × 𝐿 − 𝑘𝑥 × 𝐿 = 𝐼𝑜 × 𝜃̈
2
𝑥 = 𝜃𝐿
𝐿
−𝑚𝑔 × 𝜃 − 𝑘𝜃𝐿 × 𝐿 − 𝑘𝜃𝐿 × 𝐿 = 𝐼𝑜 × 𝜃̈
2
Se calcula la inercia polar de la placa rectangular como se indica a continuación:
𝐼𝑜 = ∫ 𝑟 2 𝑑𝑚
𝐼𝑜 = ∫ 𝑥 2 𝑑𝑚 + ∫ 𝑦 2 𝑑𝑚
𝑚𝑎𝑠𝑎(𝑚) = á𝑟𝑒𝑎 × 𝑑𝑒𝑛𝑠𝑖𝑑𝑎𝑑 = 𝐴 × 𝜌 = 𝐿 × 𝐿 × 𝜌
𝑑𝑚 = 𝜌 × 𝑑𝐴
Inercia polar de la placa con respecto al eje x:
𝐼𝑥 = ∫ 𝑦 2 𝑑𝑚
14
𝐼𝑥 = ∫ 𝑦 2 × 𝜌 × 𝑑𝐴
𝐼𝑥 = ∫ 𝑦 2 × 𝜌 × 𝑑𝐴
𝐼𝑥 = ∫ 𝑦 2 × 𝜌 × 𝐿 × 𝑑𝑦 = 𝜌𝐿 ∫ 𝑦 2 𝑑𝑦
0
0
𝑦3
𝐼𝑥 = 𝜌𝐿 ∫ 𝑦 2 𝑑𝑦 = 𝜌𝐿 × [ ]
3 −𝐿
−𝐿
0
(0)3 (−𝐿)3
𝐿3
𝐿4
𝐼𝑥 = 𝜌𝐿 [
−
] = 𝜌𝐿 × = 𝜌
3
3 −𝐿
3
3
Como:
𝑚 =𝐿×𝐿×𝜌
𝐼𝑥 =
𝑚𝐿2
4
A continuación, se determinar la Inercia con respecto al eje y:
𝐼𝑦 = ∫ 𝑥 2 𝑑𝑚
𝐼𝑦 = ∫ 𝑥 2 × 𝜌 × 𝑑𝐴
𝐼𝑦 = ∫ 𝑥 2 × 𝜌 × 𝑑𝐴
15
𝐿/2
𝐼𝑦 = ∫ 𝑥 2 × 𝜌 × 𝐿 × 𝑑𝑥 = 𝜌𝐿 ∫
𝑥 2 𝑑𝑦
−𝐿/2
𝐿/2
𝐿/2
𝐼𝑦 = 𝜌𝐿 ∫
𝑥 2 𝑑𝑦
−𝐿/2
𝑥3
= 𝜌𝐿 × [ ]
3 −𝐿/2
0
𝐿 3
𝐿 3
( )
(− )
2 ]
𝐼𝑦 = 𝜌𝐿 [ 2 −
3
3
𝐿3 𝐿3
𝐿4
= 𝜌𝐿 × [ + ] = 𝜌
24 24
12
−𝐿
Como:
𝑚 =𝐿×𝐿×𝜌
Entonces la inercia polar con respecto al eje x es:
𝐼𝑦 =
𝑚𝐿2
12
Es decir que la inercia polar del sistema es:
𝑚𝐿2 𝑚𝐿2
5
𝐼𝑜 =
+
=
𝑚𝐿2
4
12
12
Una vez calculada la inercia se puede determinar la ecuación del equilibrio estático de la siguiente
manera:
← ∑ 𝑀𝑜 = 𝐼𝑜 × 𝜃̈
+
𝐿
−𝑚𝑔 × 𝜃 − 𝑘𝑥 × 𝐿 − 𝑘𝑥 × 𝐿 = 𝐼𝑜 × 𝜃̈
2
𝑥 = 𝜃𝐿
𝐿
5
−𝑚𝑔 × 𝜃 − 𝑘𝜃𝐿 × 𝐿 − 𝑘𝜃𝐿 × 𝐿 =
𝑚𝐿2 × 𝜃̈
2
12
5
𝐿
𝑚𝐿2 × 𝜃̈ + 𝑚𝑔 𝜃 + 2𝑘𝜃𝐿2 = 0
12
2
5
𝐿
𝑚𝐿2 × 𝜃̈ + (𝑚𝑔 + 2𝑘𝐿2 ) 𝜃 = 0
12
2
𝐿
𝑚𝑔 + 2𝑘𝐿2
2
𝜃̈ + (
)𝜃 = 0
5
𝑚𝐿2
12
12𝑔 24𝑘
𝜃̈ + (
+
)𝜃 = 0
10𝐿 5𝑚
16
Entonces la frecuencia angular es
12𝑔 24𝑘
𝜔=√
+
10𝐿 5𝑚
Con los datos del enunciado del problema se determina 𝜔
12 × 32.2 24 × 8 × 12
𝜔=√
+
= 19.0244 𝑟𝑎𝑑⁄𝑠
10 × 1.2 5 × 45⁄
32.2
Entonces la frecuencia f es:
𝑓=
𝜔
19.0244
=
2𝜋
2𝜋
𝑓 = 3.03 𝐻𝑧
17
Comprobación:
Ilustración 5-Respuesta (Beer, Jhonston, & Conrwell, 2010)
18
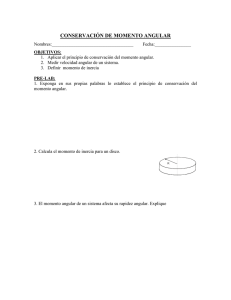
Ejercicio No. 5
Desarrollo
Determine la frecuencia natural de la viga empotrada mostrada en la figura que soporta un peso W
en su centro. Desprecie la masa de la viga. (Paz & Leight, Structural Dynamics, 2004, pág. 21)Ejercicio
1.5.
Se emplea el método de la rigidez para determinar los grados de libertad del sistema, como se indica
en la siguiente figura:
w
𝑘11 =
24𝐸𝐼 24𝐸𝐿 192𝐸𝐼
=
=
𝐿3
𝐿3
𝐿 3
( )
2
𝑘12 = 0
𝑘21 = 0
19
𝑘22 =
8𝐸𝐼 8𝐸𝐿 16𝐸𝐼
=
=
𝐿
𝐿
𝐿
( )
2
Con los coeficientes se procede a armar la matriz KQQ:
192𝐸𝐼
3
{𝐾𝑄𝑄} = [ 𝐿
0
16𝐸𝐼
𝐿
0
]
{∆𝑄} = [𝐾𝑄𝑄]−1 × −{𝑄}
192𝐸𝐼
3
{∆𝑄} = [ 𝐿
0
−1
0
16𝐸𝐼
𝐿
]
−𝑚𝑔
×−[
]
0
−𝑚𝑔𝐿3
{∆𝑄} = [ 192𝐸𝐼 ]
0
Se obtiene el coeficiente de rigidez k mediante:
Como 𝐹 = 𝑘 × ∆1
−𝑤 = 𝑘 ×
𝑘=
−𝑤𝐿3
192𝐸𝐼
192𝐸𝐼
𝐿3
↓+ ∑ 𝐹𝑦 = 𝑚 × 𝑥̈
−𝑘𝑥 + 𝑚𝑔 = 𝑚 × 𝑥̈
−
192𝐸𝐼
𝑥 + 𝑚𝑔 = 𝑚 × 𝑥̈
𝐿3
20
𝑚𝑥̈ +
𝑥̈ +
192𝐸𝐼
𝑥 = 𝑚𝑔
𝐿3
192𝐸𝐼
𝑥=𝑔
𝑚𝐿3
192𝐸𝐼
𝜔=√ 𝑤
𝐿3
𝑔
Entonces la frecuencia natural del sistema es:
3𝐸𝐼
8√𝑤
192𝐸𝐼
𝐿3
√
𝑔
𝜔
𝑚𝐿3
𝑓=
=
=
2𝜋
2𝜋
2𝜋
3𝐸𝐼𝑔
4√ 3
𝐿 𝑤
𝑓=
𝜋
Comprobación:
21
22
Bibliografía
Beer, F., Jhonston, R., & Conrwell, P. (2010). Mecánica Vectorial Para Ingenieros Dinámica. Nueva
York: McGraw-Hill .
Paz, M., & Leight, W. (1992). Dinámica Estructural. Barcelona: Editorial Reverté.
Paz, M., & Leight, W. (2004). Structural Dynamics. Massachusets: Kluwer Academics Publisher.
23