- CÁLCULO DE ELEMENTOS DE MÁQUINAS –
Los apuntes realizados por la cátedra no pretenden ser un elemento original y carecen de
elaboración experimental propia, prácticamente son recopilaciones bibliográficas de los temas
que involucran, combinadas de un modo didáctico, de forma tal que algunos métodos y normas
pueden no coincidir con sus versiones originales.
Se ha buscado dar una fundamentación teórica para arribar a un enfoque práctico que permite,
en base a una información completa, un adecuado tratamiento del tema.
Somos parte de la universidad pública y no es nuestro objetivo tener un lucro con su publicación, por lo tanto los
mismos carecen de costo. Si algún autor o editorial considera que no se puede utilizar determinada imagen o texto, o
que se debe hacer alguna mención especial para tener en cuenta los derechos de autor, agradeceremos nos lo informe
para cumplir con sus requerimientos.
Engranajes: Generalidades
1
Engranajes: Cinemática y Cálculo
Índice de Temas
1.
2.
Introducción: ............................................................................................................................................................. 3
Transmisión del movimiento: ................................................................................................................................... 5
2.1. Superficies Conjugadas: ...................................................................................................................................... 7
2.2. Transmisión entre ejes paralelos: ........................................................................................................................ 8
2.3. Métodos para obtener pares de superficies conjugadas: .................................................................................... 10
3. Superficies conjugadas utilizadas en la práctica: ................................................................................................. 11
3.1
Cicloides............................................................................................................................................................ 11
3.2. Evolventes ......................................................................................................................................................... 12
4. El perfil de Evolvente: ............................................................................................................................................ 13
4.1. Terminología y normalización de los dientes rectos de evolvente .................................................................... 13
4.2. Ecuaciones del perfil: ........................................................................................................................................ 17
4.3. Trazado de la evolvente..................................................................................................................................... 18
5. Características cinemáticas del engrane: .............................................................................................................. 19
5.1. Flanco activo: .................................................................................................................................................... 19
5.2. Arco de engrane: ............................................................................................................................................... 19
5.3. Grado de recubrimiento:.................................................................................................................................... 20
5.4. Interferencia: ..................................................................................................................................................... 21
6. Diseño y cálculo de engranajes: ............................................................................................................................. 24
6.1. Fórmula de Lewis:............................................................................................................................................. 24
6.2. Fórmula de Lewis-Barth: .................................................................................................................................. 29
6.3. Fórmula de Buckingham – Cargas dinámicas: .................................................................................................. 30
6.4. Concentración de Tensiones: ............................................................................................................................ 33
6.5. Fallas de los dientes de engranajes: ................................................................................................................... 34
6.5.1.
Desgaste: ................................................................................................................................................... 34
6.5.2.
Deformación plástica: ............................................................................................................................... 35
6.5.3.
Fatiga superficial o picado (pitting): ........................................................................................................ 35
6.5.4.
Rotura de diente: ....................................................................................................................................... 37
6.6. Ecuaciones de la American Gear Manufacturers Association (AGMA): .......................................................... 38
6.6.1.
Ecuación para el esfuerzo por flexión: ..................................................................................................... 39
6.6.2.
Ecuación de desgaste: ............................................................................................................................... 47
6.7. Consideraciones generales sobre el diseño de engranajes: ................................................................................ 50
6.7.1.
Tipos funcionales de engranes: ................................................................................................................. 51
6.7.2.
Materiales para engranes: ........................................................................................................................ 52
6.7.3.
Elección del número de dientes: ............................................................................................................... 54
6.7.4.
Cargas en los apoyos: ............................................................................................................................... 55
7. Engranajes Helicoidales: ........................................................................................................................................ 59
7.1. Geometría: ......................................................................................................................................................... 59
7.2. Cinemática: ....................................................................................................................................................... 63
7.3. Diseño y cálculo: ............................................................................................................................................... 64
7.3.1.
Fórmula de Lewis: .................................................................................................................................... 64
7.3.2.
Fórmula de Lewis-Barth: .......................................................................................................................... 66
7.3.3.
Fórmula de Buckingham – Cargas dinámicas: ......................................................................................... 66
7.3.4.
Fatiga superficial o picado (pitting): ........................................................................................................ 66
7.4. Cargas en los apoyos: ........................................................................................................................................ 66
8. Engranajes Cónicos: ............................................................................................................................................... 69
8.1. Geometría .......................................................................................................................................................... 69
8.2. Cinemática: ....................................................................................................................................................... 72
8.3. Diseño y cálculo: ............................................................................................................................................... 73
8.3.1.
Fórmula de Lewis: .................................................................................................................................... 74
8.3.2.
Fórmula de Barth:..................................................................................................................................... 75
8.3.3.
Fórmula de Buckingham – Cargas dinámicas: ......................................................................................... 75
8.3.4.
Fórmula de Buckingham – Fatiga superficial: ......................................................................................... 75
8.4. Cargas en los apoyos: ........................................................................................................................................ 76
8.5. Engranajes cónicos no rectos ............................................................................................................................ 78
8.5.1.
Engranajes cónicos de dientes inclinados u oblicuos: .............................................................................. 78
8.5.2.
Engranajes cónicos de dentado curvo o en arco de círculo: .................................................................... 79
8.5.3.
Engranajes cónicos de dentado en espiral:............................................................................................... 79
8.5.4.
Relación de transmisión: ........................................................................................................................... 80
8.5.5.
Resistencia: ............................................................................................................................................... 80
Engranajes: Generalidades
2
8.5.6.
Fuerzas de empuje: ................................................................................................................................... 80
8.5.7.
Rendimiento: ............................................................................................................................................. 81
8.5.8.
Engranajes hipoidales: ............................................................................................................................. 82
8.5.9.
Engranajes espiroidales:........................................................................................................................... 83
9. Tornillo sinfín-rueda helicoidal.............................................................................................................................. 84
9.1. Terminología de los Sistemas Tornillo sin fin – Rueda Helicoidal ................................................................... 85
9.2. Relación de transmisión .................................................................................................................................... 86
9.3. Tipos constructivos ........................................................................................................................................... 87
9.4. Dimensiones normalizadas de los tornillos y ruedas ......................................................................................... 88
9.5. Materiales y fabricación de engranes de tornillo sinfín y rueda helicoidal ....................................................... 89
9.6. Cálculo resistente de los dientes de la rueda de tornillo sinfín .......................................................................... 90
9.7. Capacidad térmica del conjunto Tornillo sinfín – Rueda helicoidal ................................................................. 91
9.8. Acciones recíprocas en el contacto entre los filetes del tornillo y los dientes de la rueda ................................ 92
9.9. Condiciones de reversibilidad e irreversibilidad ............................................................................................... 95
9.10.
Rendimiento .................................................................................................................................................. 95
Engranajes: Generalidades
3
1. Introducción:
En este capítulo se tratará la cinemática, geometría y diseño del engranaje.
El engranaje (rueda dentada) es el instrumento
que permite transmitir, y mantener constante,
el movimiento de rotación a un eje de un
mecanismo o máquina. También puede
cambiar la dirección del eje de rotación y
puede transformar un movimiento rotatorio en
uno lineal.
El inventor de los engranajes en todas sus
formas fue Leonardo da Vinci, quien a su
muerte en la Francia de 1519, dejó para
nosotros sus valiosos dibujos y esquemas de
muchas de los mecanismos que hoy utilizamos
diariamente.
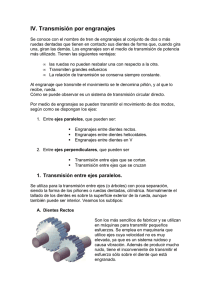
En la primer figura se aprecia un mecanismo
para repeler ataques enemigos, consiste de
aspas al nivel del techo movidas por un eje
vertical, unido a un "engranaje", el
movimiento lo producen soldados que giran
una rueda a nivel del piso y provocando que
los enemigos que han alcanzado el techo sean
expulsados. Leonardo se dedica mucho a la
creación de máquinas de guerra para la defensa y el ataque, sus materiales son madera, hierro
y cuerdas las que se elaboran en forma rudimentaria, pero sus esquemas e invenciones trascienden
el tiempo y nos enseñan las múltiples alternativas que nos brindan mecanismos básicos de palancas,
engranes y poleas unidas entre si en una máquina cuyo diseño geométrico es notable.
En la segunda figura se puede apreciar la transmisión trasera para un carro, el eje vertical mueve el
"engrane" que impulsa las ruedas hacia adelante o atrás.
En la última figura una manivela mueve un elemento que llamaremos tornillo sin fin el que a su vez
mueve la rueda unida a él. En este caso, el mecanismo se utiliza como tecle para subir un balde
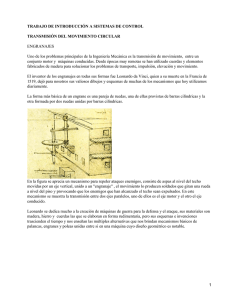
Han existido desde la invención de la maquinaria
rotativa. Debido a sus propiedades de
multiplicador de la fuerza, los ingenieros los
usaron para levantar cargas pesadas tales como
materiales para construcción. Su ventaja mecánica
se usó también para elevadores de anclas de
embarcaciones y pre-tensionado de catapultas.
Figura 1 – Sistema utilizado en el siglo 18
Se hicieron de madera, con espigas o estacas
cilíndricas por dientes, y eran lubricados con
grasas de origen animal. También se utilizaron en
maquinarias accionadas por agua o viento.
En la Figura 1 se observa un sistema usado para accionar maquinarias textiles, como la velocidad de
rotación de una rueda accionada por agua, o por caballo, era muy lenta para utilizarse, se necesitaba
usar un par de engranajes de madera para incrementar la velocidad a un nivel adecuado.
Engranajes: Generalidades
4
Durante la Revolución Industrial en Gran Bretaña, en el siglo 18, se produjo una “explosión” en el
uso de engranajes de metal. Durante el siglo 19 se desarrolló rápidamente la ciencia para la
fabricación y diseño del engranaje. Hoy en día, los desarrollos más importantes están en el área de
los materiales utilizados. La metalurgia moderna ha incrementado mucho la vida útil de los
engranajes industriales y automotrices, y el nivel de consumo de productos electrónicos ha llevado
a utilizar engranajes plásticos de acción silenciosa, confiable y sin lubricación.
En algunas transmisiones “compite” con las correas y las cadenas. Ninguna de estas tres
transmisiones mecánicas es la más adecuada para todos los sistemas de máquinas. La siguiente
comparación muestra las ventajas de cada una de ellas donde se observan regiones parcialmente
superpuestas en las que cualquiera puede ser el sistema de primera elección para el diseñador, una
vez realizada la selección en base de la resistencia y la vida esperada, generalmente se consideran
los factores económicos antes de tomar la decisión final: costo original, costos de mantenimiento y
costo de producción perdida durante el tiempo de paros.
-
Correas:
1.
2.
3.
4.
5.
6.
-
Cadenas:
1.
2.
3.
4.
5.
6.
7.
8.
-
Aislamiento eléctrico, no hay contacto metal con metal entre conductor y conducido.
Menos ruido que las cadenas.
Las planas se pueden utilizar para grandes distancias entre centros, en los que el peso
de la cadena resultaría excesivo o se necesitaría un tren de engranajes.
Las planas se pueden utilizar a altas velocidades, donde la inercia de las cadenas
debe considerarse en la tensión de la rueda dentada y de la cadena.
No se requiere lubricación
La variación de la distancia entre centros y la alineación de los ejes son menos
críticos que para transmisiones por engranajes o cadenas.
La variación de la distancia entre centros se puede acomodar más fácilmente que en
los engranajes.
Son más fáciles de instalar y reemplazar que las correas, debido a que la distancia
entre centros no necesita ser reducida para la instalación.
No requieren tensión sobre el lado flojo, por lo que las cargas sobre los apoyos se
ven reducidas.
No deslizan ni resbalan, como sí lo hacen las correas (salvo las dentadas).
Son más compactas debido a que los diámetros de las ruedas dentadas son menores y
las cadenas más angostas que las poleas y las correas para la misma potencia.
No desarrollan cargas estáticas.
No se deterioran con el tiempo, el calor, el aceite ni la grasa.
Funcionan a temperaturas más altas que las correas.
Engranajes:
1.
2.
3.
4.
5.
6.
Son más compactas que las anteriores, debido a que las distancias entre centros son
mínimas.
Tienen la mayor capacidad de velocidad.
Tienen límites más amplios de relaciones de velocidad que las cadenas.
Pueden transmitir mejor la potencia alta a velocidad elevada.
Los metálicos no se deterioran con el tiempo, el calor, el aceite ni la grasa.
Los metálicos no desarrollan cargas eléctricas estáticas.
Engranajes: Conjugadas prácticas
5
2. Transmisión del movimiento:
Para adoptar decisiones a la hora del diseño y cálculo del engranaje son imprescindibles las
consideraciones cinemáticas, así como también la nomenclatura y la normalización.
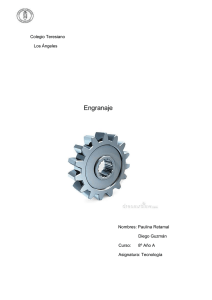
Figura 2 – Mecanismo de transmisión
A continuación se analiza un mecanismo que realiza la transmisión del
movimiento de un cuerpo (C1), que gira solidariamente unido a un eje
(E1) con velocidad angular (W1), a otro cuerpo (C2), que girar
solidariamente unido a un eje (E2) con velocidad angular (W2), de forma
tal que los ejes de rotación permanecen en la misma posición relativa y
que su relación de velocidades (i) es constante en el tiempo. La relación
de transmisión (i) es una magnitud adimensional que representa el
número de veces que la rueda de salida gira más, o menos, que la rueda
de entrada. Su valor viene dado por la siguiente expresión: i = W2 / W1
Este mecanismo es una cadena cinemática compuesta por tres elementos: un elemento fijo (B) y dos
elementos móviles (C1 y C2).
1. Elemento fijo: es el bastidor, con respecto a él permanecen fijos los ejes de los elementos
móviles, aún cuando éste se desplace.
2. Elemento móvil C1: se lo denomina elemento motor (transmite el movimiento a otro elemento
móvil), está vinculado al bastidor por medio de una cupla rotoide de eje X1, que permitirá
rotaciones relativas con respecto al mismo.
3. Elemento móvil C2: se lo denomina elemento conducido, está vinculado al bastidor por medio
de otra cupla rotoide de eje X2, que permitirá rotaciones relativas con respecto al mismo.
El movimiento relativo de C1 con respecto a C2 se puede obtener en función de los movimientos
absolutos de éstos respecto de B. El movimiento absoluto de C2, puede obtenerse como
superposición del movimiento relativo de C2 respecto de C1 y del movimiento de arrastre de C1,
resultando:
C2 / B = C2 / C1 + C1 / B
Entonces el movimiento relativo: C2 / C1 = C2 / B - C1 / B = 2 - 1 = 21
El movimiento relativo queda entonces definido por los vectores 2 (X2,W2) y - 1 (X1,-W1); la
recta de acción del vector rotación relativa 21 es el eje central Yi que, dado que las rotaciones 2 y
-1 se mantienen en relación constante, se mantiene invariable respecto de los ejes y en
consecuencia también respecto del bastidor.
El lugar geométrico, respecto de cada uno de los cuerpos, de las sucesivas posiciones del eje central
Yi se denomina superficie primitiva (es el axoide del movimiento relativo). Puesto que, como ya se
mencionó, W2/W1 es constante:
i = W2(t) / W1(t) = Cte.
Y, en consecuencia, la posición del eje central Yi se mantiene invariable respecto de los ejes X2 y
X1, las superficies primitivas son superficies de revolución que se pueden concebir generadas por la
rotación de Yi en torno de dichos ejes.
Algunos de los casos que pueden presentarse son:
-
Ejes paralelos:
El movimiento relativo es una rotación, cuyo vector (21) es paralelo a los ejes del movimiento y
coincide con el eje central (Yi), las superficies primitivas son dos cilindros. El movimiento relativo
puede obtenerse mediante una rodadura, sin resbalamiento, de un cilindro primitivo sobre el otro.
Engranajes: Conjugadas prácticas
6
En la Figura 3 se observan el resultado cuando los ejes tienen distinto sentido
de giro, para el caso de ejes que tienen igual sentido de giro se obtienen dos
superficies cilíndricas interiores. Se recuerda que cuando el sentido de giro es
distinto entre los ejes paralelos la resultante vectorial (21) se encuentra en el
espacio entre los vectores 1 y 2; y cuando los ejes tienen igual sentido de
giro dicho vector resultante es exterior al espacio entre los vectores
mencionados.
-
Figura 3 – Ejes paralelos
Ejes concurrentes:
El movimiento relativo es una rotación alrededor de un eje que pasa por el
punto de concurrencia de los ejes (es la resultante del paralelogramo de
vectores -1 y 2) y que coincide con el eje central, las superficies
primitivas son dos conos (Figura 4).
Figura 4 – Ejes concurrentes
-
El movimiento relativo puede obtenerse haciendo rodar, sin resbalar, un
cono primitivo sobre el otro.
Ejes alabeados:
El movimiento relativo es una roto traslación, las superficies primitivas son
dos hiperboloides reglados de revolución (Figura 5).
El movimiento relativo
puede obtenerse haciendo rodar (existe
resbalamiento) un hiperboloide sobre el otro, combinado con un
desplazamiento a lo largo de la generatriz de contacto (que es otra recta
alabeada).
Figura 5 – Ejes alabeados
Entonces, para transmitir el movimiento entre dos cuerpos, que giran cada uno en torno a un eje con
una determinada velocidad angular, de forma tal que se mantengan constantes la posición relativa
de sus ejes y su relación de velocidades angulares, podemos utilizar las superficies primitivas o
axoides del movimiento relativo. Dicha transmisión se logra por el rodamiento lineal de una
superficie sobre la otra, combinado en el caso más general con un resbalamiento o traslación
relativa a lo largo de la generatriz de contacto.
Las ruedas de fricción son mecanismos en los cuales la transmisión se realiza por contacto de las
superficies primitivas mencionadas, que constituyen la periferia de los elementos. Su capacidad de
transmitir potencia depende del rozamiento y, por lo tanto están expuestas al resbalamiento, no
manteniendo una relación de velocidad definida e invariable. Sólo se obtendrá un accionamiento
positivo sin resbalamiento, si se disponen dientes sobre esas superficies para constituir engranajes.
Existen distintos tipos de engranajes (Tabla 1), algunos de los cuales se ven en las Figuras 6 a 9.
Posición de los ejes
Forma de las ruedas
Paralelos
Cilíndricas
Se cortan (coplanares)
Cónicas
Cilíndricas
Se cruzan (no coplanares)
Cónicas
Hiperbólicas
Tabla 1 – Tipos de Engranajes
Clase de ruedas
Dientes Rectos
Dientes Helicoidales
Dientes Rectos
Dientes Inclinados
Helicoidales
Tornillo Sinfín-Rueda Helicoidal
Hipoidales
Hiperbólicas
Engranajes: Conjugadas prácticas
Figura 6 – Rectos
7
Figura 7 – Helicoidales
Figura 8 – Cónicos
Figura 9 – Tornillo sinfín
2.1. Superficies Conjugadas:
El problema básico resuelto por los engranajes es asegurar que los discos gruesos, en contacto,
giren uno contra el otro sin deslizarse. La acción de que los dientes adicionados a estos discos no
interfieran con la rotación uniforme que uno de los discos induce en el otro, se conoce como acción
conjugada o ley de engrane. La declaración formal de la ley de engrane es que para transmitir un
movimiento rotatorio uniforme de un eje a otro por medio del engrane, la perpendicular a un perfil
de dientes en su punto de contacto con un diente del otro engrane siempre debe pasar a través de un
punto fijo sobre la línea de centros entre los dos ejes. Las curvas que satisfacen esta ley se llaman
curvas o superficies conjugadas. A continuación se fundamentan estas afirmaciones.
Se pueden crear pares de superficies S1 y S2 solidarias a los cuerpos C1 y C2 respectivamente, en las
que S2 (solidaria también a la primitiva P2) es envolvente de las sucesivas posiciones de la
superficie S1 (solidaria a la primitiva P1) en el movimiento relativo C2/C1. Esta propiedad es
recíproca, es decir que S1 es a la vez envolvente de las sucesivas posiciones de S2. A este par de
superficies se las denomina: superficies conjugadas.
Entonces la transmisión del movimiento se puede realizar por medio de este tipo de superficies. Las
transmisiones por engranajes se realizan por contacto de superficies conjugadas que forman los
flancos de los dientes.
De los tipos de engranajes mencionados anteriormente, el engranaje recto es el más sencillo y, por
esta razón, se utilizará para desarrollar las relaciones cinemáticas primarias de la forma de los
dientes.
En el análisis que sigue se supone que los dientes están perfectamente formados, son lisos y
absolutamente rígidos, por supuesto que esta hipótesis no concuerda con la realidad debido a las
limitaciones de las máquinas utilizadas para formar los dientes y a que la aplicación de fuerzas
origina deflexiones.
Al actuar entre sí para transmitir el movimiento de rotación, los dientes
de engranes conectados actúan de modo semejante a las levas (Figura
10). En teoría puede seleccionarse arbitrariamente un perfil para un
diente y luego hallar el perfil de dientes en el engrane conjugado, en la
práctica se adoptan pares de curvas que tengan condiciones aptas desde
el punto de vista de la transmisión y su fabricación.
Cuando una superficie empuja a la otra, el punto de contacto queda
donde las dos son tangentes entre sí (punto c) y, en cualquier instante,
las fuerzas están dirigidas a lo largo de la normal común (ab) a las dos
curvas; esta recta, que representa la dirección en que actúan las
fuerzas, se denomina línea de acción; cortará a la línea de centros (OO) en un punto I. Las circunferencias trazadas por I (P en la Figura),
Figura 10 – Acción Conjugada
Engranajes: Conjugadas prácticas
8
con centro en los puntos O, se denominan circunferencias primitivas, y el radio de cada una, radio
primitivo, el punto I es el punto primitivo. Para transmitir movimiento con relación constante de
velocidades angulares, el punto primitivo debe permanecer fijo, es decir, todas las líneas de acción
para todo punto de contacto instantáneo deben pasar por el mismo punto I.
2.2. Transmisión entre ejes paralelos:
Se aplica a continuación lo analizado anteriormente para el caso de una transmisión entre ejes
paralelos.
Como se ha visto, los axoides del movimiento relativo son dos
cilindros. Cualquiera de los puntos del eje central Yi tiene la misma
velocidad absoluta supuesto vinculado al cuerpo C1 o al C2 (ruedan
sin resbalar):
V = W1 x R1 = W2 x R2, y la relación de transmisión resulta:
i = W2/W1 = R1/R2
Figura 11 – Primitivas de ejes paralelos
Es posible estudiar el movimiento espacial C2/C1 en el plano con las
figuras que se obtienen seccionando el sistema con planos normales
a los ejes del movimiento (Figura 11). Las circunferencias
primitivas (Cp1 y Cp2) son entonces la intersección de dicho plano
con los cilindros primitivos (S1 y S2), el punto de contacto de las
mencionadas circunferencias (I) es el punto primitivo.
El movimiento relativo C2/C1 se puede obtener también por el
rodamiento sin resbalamiento de Cp2 sobre Cp1. Si se une
solidariamente a la circunferencia primitiva Cp2 una curva plana
cualquiera S2, en el movimiento relativo de las circunferencias
primitivas, las sucesivas posiciones de dicha curva respecto de la
otra primitiva Cp1, serán envueltas por una curva S1 solidaria a la
mencionada circunferencia. Las curvas estarán en todo instante en
Figura 12 – Conjugadas de ejes paralelos contacto en un punto N (punto característico), y tendrán una
tangente y una normal común, esta última pasa en todo instante por
el punto primitivo I. Ambas curvas son recíprocamente envuelta y envolvente, son curvas
conjugadas. El movimiento relativo Cp2/Cp1, y en consecuencia el C2/C1, puede describirse por el
S2/S1, siendo el último un movimiento de rodamiento con resbalamiento.
A continuación se presenta un ejemplo práctico para determinar una curva conjugada a partir de una
curva existente a fin de visualizar el concepto de que una curva “envuelve” las sucesivas posiciones
de la otra. Para ello se utilizarán curvas evolventes, cuya definición y propiedades se dan en la
sección 3.2, que son generadas a partir de una circunferencia llamada circunferencia base y que
están en contacto siempre en un punto situado sobre la línea de acción, que a la vez es tangente a
dichas circunferencias.
-
Se trazan las circunferencias primitivas (Cp1 y Cp2) de igual diámetro (Figura 13).
Utilizando los mismos centros (O1 y O2) se trazan dos circunferencias (circunferencias bases Cb1
y Cb2) de igual diámetro.
Se traza la tangente común a estas últimas (línea de acción) que pasará por el punto I.
Se traza una evolvente (S1), en el punto de tangencia de Cb1 y la línea de acción (punto A), que
está solidariamente unida con Cb1.
Se divide esta circunferencia (Cb1) en un número de partes iguales, y se copia en cada uno de
esos puntos la evolvente anterior.
Engranajes: Conjugadas prácticas
9
Ahora bien, considerando que la rueda Cb1 se mueve en sentido anti
horario, las evolventes dibujadas (Figura 13) representan las
distintas posiciones que ocuparía la misma al acompañar a aquella
en su giro por estar solidariamente unidas.
Cp2
Cb2
O2
Las circunferencias primitivas ruedan una sobre otra sin resbalar
siendo testigos del movimiento sincrónico. Por lo tanto, al girar S1 a
la próxima posición (Figura 14), el arco recorrido (RS) será igual
para ambas; los puntos R y S se obtienen prolongando los radios de
los puntos sucesivos de división de Cb1, hasta Cp1.
En la posición inicial (punto A) se puede considerar que coinciden
un punto A1, perteneciente a la curva S1 conocida, y uno A2,
perteneciente a una curva S2 que se quiere determinar (solidaria con
Cb2), porque A se encuentra sobre el lugar geométrico donde tiene
lugar
Cp2 el contacto entre las curvas (línea de acción o de engrane).
Cb2
S
A2
R
A
S1
Cp2
Cp1
O1
Figura 14
Cb2
Cb1
O2
C
I
B
A
S1
O1
Cb1
Cp1
Cuando se produce el giro
Figura 13
mencionado (Figura 14), el
punto A2 se desplaza según un arco que tiene su radio de giro
en O2, su origen en A y recorre un ángulo igual al del arco
RS (por ser ambas circunferencias de igual diámetro).
Uniendo este punto con el que en ese instante sea punto de
contacto (punto B), se encuentra un tramo de la curva S2.
Entonces, S1 (de A1 a B) se mantuvo en contacto con S2 (de
A2 a B) siempre en un único punto situado sobre el segmento
AB, el cual forma parte de la línea de acción que es normal
común de las curvas y pasa por el punto I.
O2
A1
D
En la Figura 15 se repite el procedimiento para la siguiente
posición y en la Figura 16 se observa la máxima longitud
utilizable de S1 (punto D), que es en el origen de S2.
A2
Cp2
Cb2
O2
S2
D
I
A2
B
B2
A1
S1
A1
A1
S1
A2
O1
Figura 15
Cp1
Cb1
O1
Cp1
Cb1
Figura 16
Engranajes: Conjugadas prácticas
10
Como ya se ha mencionado el movimiento S2/S1 es de rodamiento
con resbalamiento: el punto de contacto N (Figura 17) se mueve con
una velocidad tangencial VN2 que será perpendicular a O2-N si se lo
considera como perteneciente a Cp2. Si se considera dicho punto
como perteneciente a Cp1, se tiene VN1 que es perpendicular a O1-N.
Las velocidades tienen la misma proyección sobre el eje normal, de
otro modo no se mantendría el contacto, pero sobre el eje tangencial
existe una diferencia de velocidades que produce el resbalamiento
citado.
El movimiento relativo es solamente posible a lo largo de la recta
tangencial y por lo tanto ésta debe ser normal al radio de giro
instantáneo, con lo cual se demuestra que la normal al punto de
contacto pasa siempre por el punto I.
Figura 17 – Velocidades en el contacto
Si las curvas S1 y S2 son proyecciones de pares de superficies conjugadas de generatrices paralelas a
los ejes de rotación, conforman los flancos de los dientes de engranajes rectos. También las
generatrices pueden ser no paralelas a los ejes, pero manteniendo la condición de que las curvas
obtenidas con cualquier sección normal a los ejes de giro sean conjugadas en el movimiento plano,
como por ejemplo las que determinan los flancos de los dientes de engranajes helicoidales.
2.3. Métodos para obtener pares de superficies conjugadas:
Se analiza en el sistema plano equivalente (sección del sistema espacial con un plano normal a los
ejes de rotación). Si las superficies conjugadas son de generatrices paralelas a los ejes, el sistema
plano se obtiene también proyectando el sistema espacial sobre un plano normal, si las superficies
conjugadas tienen generatrices que no son paralelas, se deben utilizar las secciones normales
necesarias para definirlas. Se estudia un método general para obtener superficies conjugadas y se
ejemplifica con un método geométrico en particular.
Método general: Se tiene una superficie S1 cualquiera, unida
solidariamente a Cp1 y se tiene que encontrar la conjugada S2,
solidaria a Cp2 (Figura 18).
Se hace rodar, sin resbalar, a Cp1 sobre Cp2 y se determinan las
sucesivas posiciones de S1 respecto de Cp2, la envolvente de
esas posiciones será la curva S2, conjugada de S1.
Figura 18 – Método general
En cada posición, la normal común a las superficies conjugadas
en su punto de contacto, pasa por el centro instantáneo de
rotación relativa, es decir, pasa por el punto de contacto de las
primitivas. El método descrito se denomina método de las
envolventes.
Método geométrico: Se tiene que trazar una superficie
conjugada a otra ya conocida. El que sigue se denomina método
de las envolventes, se aplica el método general analizado en el
párrafo anterior (Figura 19).
Figura 19 – Método geométrico
Se tiene una curva S1, solidaria a Cp1, se obtiene el punto de
contacto con S2 (punto N) trazando la normal a S1 por el punto
primitivo I, el punto N es también un punto de S2. El punto 1 es
Engranajes: Conjugadas prácticas
11
uno cualquiera de la primitiva Cp1, cuando llegue a I estará en contacto con el punto 1’ de la
primitiva Cp2, verificándose que el arco I1 = arco I1’ (rodamiento puro), ambos puntos (1 y 1’)
coincidirán en I, las conjugadas estarán en contacto en N1 de S1, que se obtiene trazando por 1 la
normal a S1, con N1’ de S2 que se debe determinar. En ese instante O1-1 y O2-1’ coinciden con O1O2 y las rectas 1-N1 y 1’-N1’ con la normal común al contacto (N1-I = N1’-I). El ángulo Ú, que
forma la recta de los centros con la normal común a S1 y S2, es el mismo que forman O1-1 con la
normal a S1: N1-1, y O2-1’ con la normal a S2: N1’-1’. Para obtener N1’ se trazará entonces por 1’
una recta que forme un ángulo Ú con 1’-O2, sobre la cual estará ubicado dicho punto a una
distancia: N1’-1’ = N1-1, se puede trazar una tangente a la conjugada por este punto que será normal
a N1’-1’. La curva conjugada se obtiene en consecuencia por puntos y tangentes.
Con el trazado de las superficies conjugadas se definen ciertos elementos geométricos que son
importantes en el diseño de engranajes (Figura 20):
Figura 20 – Elementos geométricos
Línea de engrane: lugar geométrico de los puntos en los
cuales se verifica el contacto de las conjugadas.
Línea de acción: recta de acción de la fuerza con la que el
perfil de la rueda conductora actúa sobre el perfil de la rueda
conducida, en cada instante coincide con la normal común a los
perfiles.
Angulo de presión(): el que se forma entre la recta de
acción y la tangente común a las circunferencias primitivas.
3. Superficies conjugadas utilizadas en la práctica:
Pueden utilizarse diversas curvas rodantes generadoras, pero solamente son dos las empleadas en la
construcción de engranajes: cíclicas y evolventes.
3.1 Cicloides
Fue uno de los primeros usados para engranajes, aunque las dificultades encontradas en producir
con exactitud este perfil lo han hecho caer gradualmente en desuso.
Figura 21 – Cicloide
Figura 22 – Epicicloide
Figura 24 – Engranaje Cicloidal
Figura 23 – Hipocicloide
Se
generan
como
trayectorias de puntos de una
circunferencia que rueda sin
resbalar
sobre
otra
circunferencia (o recta en el
caso de tener radio infinito).
La circunferencia que rueda
se denomina ruleta o
generatriz, la circunferencia
sobre la cual se mueve
aquella se denomina base.
Cicloide (Figura 21) la
base es una recta.
Epicicloide (Figura 22)
La
ruleta
rueda
exteriormente sobre la base.
Hipocicloide (Figura 23)
La ruleta rueda interiormente
sobre la base.
Engranajes: Conjugadas prácticas
12
Los engranajes (Figura 24) están formados por un perfil epicicloide (cabeza del diente) y uno
hipocicloide (raíz del diente)
3.2. Evolventes
La curva evolvente constituye la base de casi todos los perfiles de diente actualmente en uso
general.
La evolvente o desarrollante de círculo puede concebirse como la trayectoria de un punto de una
recta que rueda sin resbalar sobre un círculo o circunferencia base (Figura 25).
Tiene como propiedades geométricas:
La longitud del arco de la circunferencia
base comprendido entre el punto de arranque
de la evolvente (A) y el punto de tangencia
(T) de una recta tangente a la circunferencia,
es igual a la longitud del segmento de
tangente comprendido entre T y el punto en
que intercepta a la evolvente (P).
Una recta tangente a la circunferencia
base es normal a la evolvente.
El segmento de tangente TP es el radio
de curvatura de la evolvente en el punto P.
Figura 25 - Evolvente
Si dos evolventes se hallan en contacto en un punto P, al girar una de las bases, la evolvente mueve
por contacto directo a la otra evolvente; teniendo en cuenta las propiedades generales de las curvas
conjugadas y las particulares de las evolventes, las curvas evolventes
en contacto tienen las siguientes propiedades (Figuras 26 y 27):
El punto de tangencia de dos
evolventes en contacto se halla ubicado
sobre la tangente común a las
circunferencias bases.
En el punto de tangencia las curvas
tienen una normal común, que deben ser
a la vez tangentes a las circunferencias
bases.
Figura 26 – Propiedades de evolventes
La relación entre las velocidades
angulares de las circunferencias bases se
mantiene
constante,
dependiendo
exclusivamente de los radios de las
mismas.
Figura 27 – Propiedades de evolventes
La evolvente e1 se mueve alrededor del centro O1 con velocidad angular w1. Esta evolvente impulsa
por contacto directo a la evolvente e2 que se mueve alrededor del centro O2, con velocidad angular
w2. Cada evolvente se encuentra solidariamente unida a su circunferencia base (radio ρ). Para que se
verifique el engrane, la velocidad lineal del punto P, supuesto perteneciente a una u otra evolvente,
deberá ser la misma.
La velocidad de P supuesto perteneciente a e1 es:
Vp = w1 x ρ1
La velocidad de P supuesto perteneciente a e2 es:
Vp = w2 x ρ2
Engranajes: Conjugadas prácticas
Entonces:
13
w1 x ρ1 = w2 x ρ2 y w1 / w2 = ρ2 / ρ1
Variando la distancia entre centros de las circunferencias bases, no se pierde el contacto y no
varía la relación de transmisión.
Si se supone una de las circunferencias fija y se hace rodar sin resbalar la otra sobre la tangente
común, el contacto se mantiene, y como la relación de velocidades depende de sus radios, no varía
respecto de la que correspondía a la posición original.
Si se comparan los engranajes con dientes de perfil cicloidal con los de perfil evolvente, los
primeros tienen, entre otras, las siguientes ventajas e inconvenientes:
Ventajas:
Mejor engrane, ya que una curva convexa (epicicloide) engrana con una cóncava
(hipocicloide), entonces la superficie de contacto es mayor, el contacto más íntimo y suave, con lo
cual es desgaste es menor.
El engrane se realiza sin interferencia con un menor número de dientes.
Inconvenientes:
La distancia entre centros no se puede variar ya que el engrane no se verificaría entre puntos
correspondientes de los perfiles conjugados, requiere por lo tanto montajes muy precisos, mientras
que en los engranajes a evolvente aún cuando se modifique dicha distancia por causas fortuitas o
montaje deficiente, el engrane se conserva correcto.
El perfil del diente consta de dos curvas, con curvaturas en sentidos contrarios, lo que
dificulta su construcción, mientras que el perfil a evolvente es de una sola curva con curvatura en un
solo sentido, lo que permite su fabricación con facilidad y exactitud.
A igualdad de paso, los dientes a evolventes resultan más gruesos en la raíz que los cicloides.
Debido a lo enunciado, el engranaje cicloidal ha sido desechado de la mecánica general y su empleo
ha quedado reducido a trabajos de precisión (relojería), donde las ruedas no son talladas sino
matrizadas.
4. El perfil de Evolvente:
Se presenta la terminología utilizada, luego se analizan las ecuaciones que gobiernan el perfil de un
diente y, posteriormente, el trazado del mismo; no para pensar en el dibujo para su fabricación en el
taller, sino lo que interesa es dibujar los dientes del engranaje para adquirir conocimientos acerca de
los problemas que entraña la conexión o engrane de los dientes de dos ruedas dentadas.
4.1. Terminología y normalización de los dientes rectos de evolvente
Se estudiarán las características del dentado en el sistema plano (normal al eje de giro, Figura 28).
Mecánicamente no se hace uso de un solo par de superficies conjugadas para la transmisión del
movimiento ya que materialmente es posible emplear una parte de las mismas. Entonces en ambos
lados de la circunferencia primitiva se debe desenrollar la cuerda de un disco imaginario
(circunferencia base) cuyo radio rb es más pequeño que el de la primitiva rp. De la Figura 28 se
deduce la relación entre los radios mencionados: rb = rp cos Ø
Así, el ángulo de presión Ø determina el contorno de los dientes porque lo define la relación del
radio base con el radio primitivo; los valores más utilizados son de 20°, 22 ½° y 25°, aunque alguna
vez se utilizó 14 ½ °.
Engranajes: El perfil de evolvente
14
Se utiliza entonces una pequeña porción cercana a la circunferencia primitiva ya que los
deslizamientos durante la transmisión son menores. Los límites son la circunferencia exterior (De) ó
de addendum y la circunferencia interior (Di) o de dedendum. La distancia radial entre la
circunferencia primitiva y la exterior es la altura de cabeza o addendum (a) y la distancia radial
entre la primitiva y la interior es la altura de raíz o dedendum (d).
Este sector de conjugada transmitirá el movimiento durante un arco reducido de giro, es necesario
entonces disponer de nuevas superficies conjugadas igualmente espaciadas sobre la circunferencia
primitiva, este arco de primitiva entre dos dientes consecutivos se denomina paso circular p.
Además, por razones resistentes, es necesario darle cierta envergadura a estas porciones de
superficies limitadas; entonces, para permitir la transmisión del movimiento en ambos sentidos,
estas superficies se limitan lateralmente por otras simétricas. Este cuerpo así formado se llama
diente, siendo el espesor (e) del mismo sobre la primitiva (lleno del diente) igual a la mitad del paso
circular. El espacio, medido sobre la primitiva, entre los dientes se conoce como vacío entre dientes.
Las superficies laterales se denominan flancos y la dimensión de la generatriz de los flancos es el
ancho (b).
Figura 28 – Terminología de los engranajes para perfil de evolvente
Engranajes: El perfil de evolvente
15
La altura total del diente es igual al addendum más el dedendum, la altura de trabajo es la distancia
radial desde la circunferencia exterior a la circunferencia de huelgo que marca la distancia que el
diente conjugado proyecta en el espacio entre dientes (es tangente a la de addendum del engrane
conectado), es la suma de los addendums de las ruedas conjugadas. La diferencia entre la altura
total y la altura de trabajo es el juego radial (c), necesario para permitir el libre movimiento de los
dientes del engrane complementario.
Debido a las tolerancias en la fabricación siempre quedará
un espacio entre la cara posterior de un diente y la
anterior del siguiente del otro engranaje (Figura 29), esta
distancia se conoce como juego circunferencial, y es la
magnitud que el engranaje conductor podrá girar sin
mover el engranaje conducido cuando la dirección de
rotación es invertida. Este juego entonces, es necesario
para prevenir los errores e inexactitudes en la separación
y en la forma del diente, para proveer el espacio destinado
al lubricante entre los dientes y para prevenir la dilatación
de los dientes debida al aumento de temperatura. Pero
atenta contra el perfecto funcionamiento y, por ello, se
procura eliminarlo mejorando los procedimientos de
fabricación. Se puede expresar como ángulo o como la
distancia equivalente a lo largo de la circunferencia
primitiva.
Figura 29 – Juego circunferencial
Entre otros términos utilizados generalmente se encuentran: la menor de dos ruedas dentadas se
llama piñón y la mayor simplemente rueda o engranaje; el ángulo de presión de funcionamiento
que está determinado por la distancia entre centros, ya que, como se ha visto, los engranajes se
pueden separar, incrementándose por lo tanto el juego radial, y, sin embargo, funcionar
correctamente sin cambio alguno en la relación de velocidades, un aumento en la distancia entre
centros, por ejemplo, provoca el aumento del ángulo de presión y el distanciamiento o separación
de las primitivas.
De acuerdo con las definiciones anteriores, el paso circular para un engrane con Z dientes resulta:
p = π Dp / Z , entonces el diámetro primitivo Dp = ( p / π ) Z
La condición para que el diámetro primitivo sea un número racional, es que lo sea también el
cociente ( p / π ), en cuyo caso p es irracional. En la práctica no se mide p sino los diámetros y el
número de dientes, por ello tales dimensiones deben ser números racionales. Estas circunstancias
han llevado a adoptar en una unidad como característica del dentado, que se estandariza y en
función de la cual se expresan las dimensiones del engranaje.
En el sistema métrico decimal esta unidad se llama Módulo y vale: M [mm] = p / π = Dp / Z
En el sistema inglés se llama Diametral Pitch (paso diametral)
: Pd [1/pulg] = π / p = Z / Dp
Ambos valores son inversamente proporcionales entre sí
: M [mm] = 25.4 / Pd [pulg]
Las dimensiones del dentado se expresan entonces en función de M o Pd.
Cuando se especifica un módulo (o un paso diametral) se procura siempre que corresponda a un
valor para el cual existan herramientas de corte de tipo comercial. La lista de módulos de un
fabricante de engranajes no tiene que ser necesariamente igual a la de otros; por lo tanto, para la
selección de proyecto se puede adoptar preferentemente alguno de los siguientes:
Módulos recomendados: 1, 1.25, 1.5, 2, 2.5, 3, 4, 5, 6, 8, 10, 12, 16, 20, 25, 32, 50
Como segunda opción: 1.125, 1.375, 1.75, 2.25, 2.75, 3.5, 4.5, 5.5, 7, 9, 11, 14, 18, 22, 28, 36, 45
Engranajes: El perfil de evolvente
16
Si se trata de los pasos diametrales son de paso ancho: 2, 2.25, 2.5, 3, 4, 6, 8, 10, 12, 16
Y pasos diametrales finos: 20, 24, 32, 40, 48, 64, 80, 96, 120, 150, 200.
La
relación
de
transmisión
o
de
velocidades, como ya fue
definida, y, de acuerdo a
lo anterior, vale:
i = W2/W1
i = R1/R2
i = M Z1/ M Z2 = Z1 / Z2
Un sistema de dientes constituye una norma que especifica las relaciones que deben existir entre
adendo, dedendo, altura de trabajo, grueso del diente y ángulo de presión. La finalidad de esto es
que se puedan intercambiar los engranes de cualquier número de dientes pero del mismo ángulo de
presión y paso. De esta forma es posible diseñar engranes que funcionarán en casi cualquier
aplicación y que pueden ser hechos con herramientas normales.
Claro que no siempre es necesario o deseable que los engranajes sean intercambiables, y se han
desarrollado varios sistemas para satisfacer condiciones particulares de algunas industrias. En estos
sistemas el dedendum, addendum, ángulo de presión y la distancia entre centros se eligen para cada
instalación, para obtener las mejores condiciones de operación y los dientes más robustos. A título
de ejemplo se cita a la firma Gleason, para engranajes cónicos, que con su diseño obtiene menos
interferencia, piñones más fuertes, mejor lubricación, menos desgaste y marcha más silenciosa.
Los perfiles de engranajes
rectos de evolvente estándar,
tanto en unidades del sistema
inglés como en el métrico,
han sido establecidos por la
Asociación Americana de
Fabricantes de Engranajes
(AGMA), y algunos han sido
adoptados por el Instituto
Americano de Estándares
Nacionales (ANSI).
a: addendum
p: paso
b + c: deddendum
M: módulo
a + b: profundidad de trabajo
Ø: ángulo de presión
Las proporciones que se
observan en la Figura 30 se
a=b= .M =1
para engranajes estándares
han resumido de ellos para
= 0.8
para dientes cortos de 20°
los
engranajes
de
profundidad completa ( a + b
Paso ancho:
c = 0.250 M para 20° y 25°
= 2 M ), para todos los
c = 0.157 M para 14.5°
ángulos de presión, para los
c = 0.200 M para dientes cortos de 20°
engranajes de paso ancho (Pd
Paso fino:
c = 0.200 M + 0.0508 mm para todos los ángulos de presión
< 9.99) y para paso fino
Figura 30 – Perfiles estándares
(20≤Pd≤120).
Con estos datos podemos determinar los elementos geométricos de las ruedas, por ejemplo:
Diámetro exterior:
De = Dp + 2 a
para a = M:
De = (Z + 2) M
Que nos permite calcular el módulo de una rueda ya construida, midiendo De.
Engranajes: El perfil de evolvente
17
4.2. Ecuaciones del perfil:
Se pueden derivar de la geometría que se observa en la Figura 31.
La longitud de la cuerda imaginaria desde A hasta B es rb. , debido a que la longitud de la cuerda
estaba originalmente enrollada alrededor del círculo base desde B hasta el principio de la evolvente.
Dado que OBA es un ángulo recto, se tiene:
r2 = rb2 + (rb . )2
y r = rb . (1 + 2 ) 1/2
A partir de este triángulo y de la definición de la
evolvente, se ve que:
rb . tg( - ) = rb . , de donde = - arctg
Así, la curva evolvente está definida en términos de
las ecuaciones paramétricas, donde el parámetro se
puede incrementar desde 0 hasta a para generar un
perfil de diente desde el círculo de base hasta el
círculo exterior:
a = [ (ra / rb) 2 – 1] ½
como rb . ( + Ø) = rb . tg Ø
resulta = tg Ø – Ø,
que se conoce como función de evolvente.
Figura 31 – Geometría del diente
La descripción de ambos lados de un diente de
evolvente se puede simplificar expresando el perfil de
evolvente en términos de un ángulo desde la línea
de centros de cada diente al radio r desde el centro del
círculo primitivo. Como el ancho del diente en el
círculo primitivo está dado por /Z es evidente de la
Figura 32 que:
= + / (2 . Z) -
Un lado de un diente respecto a su línea de centros se
puede dibujar o cortar incrementando de d a a y
para cálculo de el r y correspondientes. El otro
lado del diente se puede formar a partir de los mismos
datos reemplazando por - . Los dientes
subsiguientes se pueden generar a partir de estos
datos girando la línea de centros a través de un
múltiplo de 2/Z. El espacio entre dientes puede
consistir en segmentos del círculo interior unidos a
los perfiles de evolvente de los dientes por los filetes
o por cualquier otra curva que proporcione la
resistencia necesaria, así como el huelgo para los
dientes del engrane complementario.
Figura 32 – Ángulos para definir la evolvente
Engranajes: El perfil de evolvente
18
4.3. Trazado de la evolvente
Con lo analizado en los puntos 4.1 y 4.2 se tienen los elementos para trazar la evolvente por medio
de una planilla de cálculo y/o un programa de CAD, también se puede utilizar el método
aproximado que se detalla a continuación.
Los datos que en general se poseen son el módulo (M) del engranaje, el número de dientes del par
de ruedas dentadas (Z1 y Z2) y el ángulo de presión (Ø). Con tales datos es posible trazar las
circunferencias primitivas (Dp = M Z), las de base (rb = rp cos Ø), la línea de acción o recta de
engrane (ángulo Ø), la tangente común a las primitivas y la línea que une a los centros que con la
tangente común determinan el punto primitivo (I), donde se supone que tiene lugar el contacto
(Figura 33).
A continuación se realizan lo siguiente:
Figura 33 – Trazado de la evolvente
-
-
- El perfil a evolvente es la trayectoria de I supuesto
perteneciente a la recta de acción, cuando esta rueda sin
resbalar sobre la primitiva. Para trazar dicha trayectoria
dividimos el segmento IN en partes iguales extendiendo las
divisiones más allá de N.
- Sobre la circunferencia base se toman, a partir de N,
arcos iguales a los segmentos en que se ha dividido la línea
de acción, hasta llegar al punto de arranque de la evolvente
(A), también se trazan unos arcos más desde N hacia el otro
lado.
- Se trazan las tangentes a la circunferencia base en cada
uno de los puntos determinados sobre ella.
- Sobre cada tangente se puede determinar un punto de la
evolvente tomando sobre dicha tangente tantas divisiones
como arcos se encuentren desde el punto A, hasta su punto de
contacto con la circunferencia base, dado que la distancia
desde la evolvente al punto de contacto de la tangente con la
circunferencia base es igual al arco que media entre el punto
de contacto y A.
Se traza la evolvente y se la limita con las circunferencias exterior ( De = (Z + 2) . M ) y la
circunferencia interior (Di = Dp – 2 d, por ejemplo dedendum d = 1.25 M).
Conocido el paso del dentado (p) se determina el espesor del diente (e = p/2, a efectos del
trazado se considera también que el vacío del diente es igual al espesor del mismo) y se
completa éste con el otro flanco que será simétrico al ya trazado con respecto a un eje con
centro en O2 y que corte a la primitiva en un punto ubicado, desde I, a una distancia p/4.
Con el paso también se pueden construir los flancos homólogos y por lo tanto se completa el
trazado de los demás dientes del engranaje.
Con una construcción similar puede trazarse el flanco de los dientes de la otra rueda.
Finalmente se menciona, luego de analizar los tipos de curvas y perfiles, que las condiciones que
deben cumplir dos ruedas dentadas para que engranen son:
-
Los flancos de sus dientes deben ser superficies conjugadas.
Deben tener igual paso (o módulo).
Deben tener cierto juego radial.
Deben tener cierto juego circunferencial
Engranajess: Diseño y Cálculo
19
5. Características cinemáticas del engrane:
Se determinan magnitudes tales como arco de engrane, grado de recubrimiento o relación de
contacto y número mínimo de dientes para evitar la interferencia. Son importantes porque afectan
tanto a la potencia que puede ser transmitida de un engrane a otro, como a la suavidad del
movimiento transferido en presencia de los defectos de fabricación.
5.1. Flanco activo:
No todo el flanco de los dientes de una rueda se pone en contacto con los dientes de la otra rueda.
Es importante determinar el flanco activo a fin de evitar la interferencia.
La parte del flanco de los dientes que toma contacto con los dientes de la otra rueda se llama flanco
activo.
Evidentemente, todos los puntos de la cabeza de un diente (desde el diámetro primitivo hasta el
diámetro exterior) pertenecen al flanco activo, pero no todos los puntos de la raíz (desde el diámetro
primitivo hasta el diámetro interior). Para determinar este último punto se deberá encontrar el punto
de la raíz que se pone en contacto con el punto extremo de la cabeza de los dientes de la otra rueda.
Los puntos de la raíz del diente (Figura 34) de la rueda 1
comprendidos entre I y A1 (último punto en contacto)
tomarán contacto con los puntos de la cabeza de los
dientes de la rueda 2. A1, punto a determinar, tomará
contacto con el extremo A2 de la cabeza del diente de la
rueda 2.
De igual manera, los puntos de la raíz de los dientes de la
rueda 2 comprendidos entre 1 y B2 tomarán contacto con
los puntos de la cabeza de los dientes de la rueda 1.
Los flancos activos son entonces el Arco A1B1 para la
rueda 1 y el Arco A2B2 para la rueda 2.
Para determinar A1 y B2 es necesario conocer el segmento
de engrane AB, que es la porción de la línea de engrane
sobre la cual se realiza el contacto entre los dientes. Este
se encuentra limitando la línea de engrane por las
circunferencias exteriores de las ruedas.
Figura 34 – Flanco activo
El punto en que toma contacto A2 con A1 se obtiene en la
intersección de la circunferencia exterior con centro en O2 (lugar de las sucesivas posiciones de A2)
con la línea de engrane (punto A). Trazando con centro en O1 una circunferencia que pase por A se
obtiene en la intersección con el flanco del diente de la rueda 1 el punto A1 de la raíz que engrana
con A2 (esta circunferencia trazada es el lugar de las sucesivas posiciones de A1).
De la misma forma puede determinarse B2.
En la Figura 34 se observa que las longitudes de los flancos que se pondrán en contacto son
distintas, razón por la cual existirá un deslizamiento tangencial, lo que se traduce en una pérdida de
potencia.
5.2. Arco de engrane:
Mientras dura el contacto de un par de dientes una primitiva rueda sin resbalar sobre la otra, el arco
barrido durante este contacto se llama arco de engrane, y, de acuerdo a lo enunciado, vale lo mismo
para cualquiera de las ruedas.
El contacto del punto A (Figura 34) con su conjugado tiene lugar cuando el punto r (determinado
por la normal al perfil en A2) de la primitiva C2 pase por I (A2-r será normal común). Entonces,
mientras los puntos de C2 comprendidos en el arco r-I van pasando por I, entran en contacto los
puntos de la cabeza del perfil de la rueda 2: I-A2 con los puntos de la raíz de la rueda 1: I-A1.
De igual forma, el contacto del punto B1 con su conjugado tendrá lugar cuando el punto q
(determinado por la normal al perfil en B1) de la primitiva C1 pase por I. Entonces, mientras los
Engranajess: Diseño y Cálculo
20
puntos de C1 comprendidos en el arco I-q pasan por I, entran en contacto los puntos de la cabeza del
perfil de la rueda 1: I-B1 con los puntos de la raíz del perfil de la rueda 2: I-B2.
El arco de engrane es entonces:
Ae = Arco r-I + Arco I-q
El arco r-I se denomina arco de acceso o aproximación y el arco I-q arco de receso o retroceso.
Una medida más fácil de obtener es el segmento de
engrane o longitud de contacto ya definido antes, y que en
la Figura 35 está representado por A-B. El mismo se
obtiene sumando L1 y L2 y resulta:
A-B = ( re22 - rb22 )1/2 + ( re12 - rb12 )1/2 – ( rp2 + rp1 ) sen Ø
Donde re es el radio exterior, rb es el radio base y rp es el
radio primitivo.
Esta expresión es aplicable únicamente cuando las
intersecciones de las circunferencias exteriores y la línea
de engrane están entre los puntos de tangencia de dicha
línea y las circunferencias bases, a estos últimos se los
denomina puntos de interferencia (ver 5.4.)
Figura 35 – Segmento de engrane
5.3. Grado de recubrimiento:
Cuando dos engranajes están engranados debe haber al menos un par de dientes en contacto. El
método generalmente empleado para indicar cuántos dientes están en contacto es el grado de
recubrimiento o relación de contacto.
Figura 36 – Relación de contacto
Cuando el arco de engrane es
exactamente igual al paso, o
sea Ae = p, un diente y el
espacio consecutivo ocuparán
todo el arco AB (Figura 36),
es decir, que cuando un
diente empieza justo el
contacto en a, el anterior
termina simultáneamente su
contacto en b. De modo que
durante la acción desde a
hasta b, habrá exactamente
un par de dientes en contacto.
Si el arco de engrane es mayor que el paso, por ejemplo Ae = 1.2 p, cuando un par de dientes entra
en contacto, otro par, ya en contacto, no habrá llegado todavía a b. Así, en un corto lapso habrá dos
pares de dientes en contacto, uno en la proximidad de A y otro cerca de B. A medida que avance el
engrane de los dientes, el par de dientes cercano a B debe salir del contacto dejando sólo un par de
dientes en contacto y, luego, se repetirá esta operación. Debido a la naturaleza de esta acción entre
dientes, de uno o de dos pares de ellos en contacto, conviene definir la relación de contacto o grado
de recubrimiento como:
Rc = Ae / p
Engranajess: Diseño y Cálculo
21
Número que indica el promedio de dientes en contacto. Por ejemplo una relación de 1.4 indica que
siempre habrá contacto entre un par de dientes y que el 40% del tiempo que dura el engrane de
dicho par, habrá en contacto un segundo par de dientes. Por lo general, los engranajes no deben
diseñarse con relaciones de contacto menores que 1.2, aproximadamente, porque las inexactitudes
en el montaje podrían reducir aún más esta relación, acrecentando la posibilidad de choques entre
los dientes, así como elevando el nivel de ruido.
La relación de contacto también se puede determinar en función del segmento de engrane (A-B ver
5.2), como ab es tangente a la circunferencia base, al prolongarla debe emplearse el paso base pb
(distancia medida sobre la circunferencia de base entre puntos correspondientes de dientes
adyacentes) para calcular Rc en vez del paso circular p: Rc = A-B / pb, siendo pb = p cos Ø.
5.4. Interferencia:
Se analizan los problemas que se presentan en el contacto de los dientes.
En primer lugar consideramos dos evolventes (e1 y e2), al
girar una de las bases, la de centro O2 por ejemplo, la
evolvente rígidamente vinculada a ella (e2) mueve por
contacto directo a la otra evolvente (e1), que solidaria a su
base la hace girar.
Esta transmisión del movimiento no puede prolongarse
indefinidamente con ese par de evolventes ya que, según se
observa en la Figura 37, cuando e2” corta a la línea de
engrane en el punto b, luego de haber pasado por el punto de
arranque de e1 (x), ya no es tangente a esta sino que la corta,
entonces, un perfil interfiere en el otro y el engrane no es
posible; en realidad el engrane se produciría pero con la otra
rama de e2 (línea de puntos en la figura) no materializada en
los perfiles de los dientes de engranajes.
Figura 37 - Interferencia
En segundo término se tiene el siguiente caso (Figura 38): A2,
sobre la circunferencia base, es el punto de arranque del perfil
del piñón que engrana en y con el punto A1 del perfil de la
rueda. El resto de la cabeza de la rueda, en caso de
prolongarse más allá de A1, no tiene perfil conjugado
correspondiente en el piñón; el diente de éste a partir de A2 se
completa entonces con curvas o rectas arbitrarias para
permitir entrar el resto de la cabeza de la rueda de A1 a A1’,
que no son conjugadas de la evolvente de la rueda.
Figura 38 – Interferencia entre dientes
El engrane de esta parte de la cabeza de los dientes de la
rueda con la raíz del diente del piñón es imperfecto por no
verificarse entre superficies conjugadas, en determinado
momento el perfil de cabeza “interfiere” en el perfil del piñón.
De acuerdo a lo anterior, la interferencia se produce cuando el engrane se extiende fuera del
segmento xy (punto v en la figura 38), los puntos x e y se denominan puntos de interferencia. La
interferencia limita la cabeza del diente, y es evidente que, a medida que decrece el diámetro del
piñón, la longitud permisible de la cabeza del diente de los engranajes más grandes se hace más
pequeña.
Engranajess: Diseño y Cálculo
22
Si se aumenta el diámetro del piñón, es decir si se supone que se aumenta su número de dientes Zp
(manteniendo el paso constante), el punto y tiende hacia v. La condición límite surge cuando el
extremo de la cabeza de la rueda (A1) debe engranar con el punto de inicio de la evolvente del piñón
(A2), es decir yv.
Si se considera la altura de cabeza expresada en términos
del módulo, a = λ M (ver Figura 30), siendo λ un número
que depende de las proporciones elegidas, de la Figura
39, el radio exterior máximo del engranaje 1 es:
Re1 max = rp1 + λ M = ( rb12 + xy2 )1/2
rp1 + λ M = [ rp12 cos2 Ø + ( rp1 + rp2 ) 2 sen2 Ø ] 1/2
Como rp1 = Z1 M / 2
y rp2 = Z2 M / 2,
Sustituyendo y desarrollando en la expresión anterior:
Z22 + 2 Z1 Z2 = 4 λ ( Z1 + λ ) / sen2 Ø
nos da el valor del número de dientes del piñón (Z2) para
evitar la interferencia en función del número de dientes de
la rueda (Z1), el ángulo de presión (Ø) y la relación entre
la altura de cabeza (λ) y el módulo (M) del dentado.
Figura 39 – Número mínimo de dientes
La curva que expresa los valores límites de Z2 en función
de Z1, para valores constantes de Ø y de la relación λ
(Figura 40), es una hipérbola de asíntota horizontal para Z1
= ∞ (cremallera); para este último caso el número mínimo
de dientes del piñón resulta:
Z2 = 2 λ / sen2 Ø
Figura 40 – Valores límites del número de dientes
Angulo
hélice
0 (rectos)
5
10
15
20
23
25
30
35
40
45
Angulo de presión normal
Øn (=Ø para rectos)
14.5°
32
32
31
29
27
25
24
21
18
15
12
20°
18
17
17
16
15
14
13
12
10
8
7
25°
12
12
12
11
10
10
9
8
7
6
5
Tabla 2 – Número mínimo de dientes del piñón para:
adendo = M; altura total = 1.25 M
Que para el caso de un diente de altura completa (λ = 1)
y un ángulo de presión de 20° vale 17,1 (Tabla 2), lo que
significa que un piñón con 18, o más dientes, no tendrá
interferencia con una cremallera o con cualquier otra
rueda; esto último es importante desde el punto de vista
de la intercambiabilidad, ya que un piñón con ese
número de dientes podrá ser utilizado con cualquier otra
rueda sin inconvenientes.
En caso de utilizar un número de dientes menor habrá
que determinar qué número máximo requiere la rueda
(Tabla 3).
Engranajess: Diseño y Cálculo
23
14.5°
20°
25°
Dientes
piñón
Dientes máx. de
la rueda
Dientes
piñón
Dientes máx. de
la rueda
Dientes
piñón
Dientes máx. de
la rueda
< 23
23
24
25
26
27
28
29
30
31
32
Interf.
26
32
40
51
67
92
133
219
496
ꚙ
< 13
13
14
15
16
17
18
Interf.
16
26
45
101
1309
ꚙ
<9
9
10
11
12
Interf.
13
32
249
ꚙ
Tabla3 – Número máximo de dientes de la rueda
para: adendo = M; altura total = 1.25 M
Se tienen varios métodos disponibles para evitar la interferencia:
1. El rebaje es un procedimiento en el cual la parte del diente debajo de la circunferencia de base
es cortado o rebajado. Por consiguiente, no se tendrá contacto en la parte del diente con perfil
no conjugado. Este método tiene dos desventajas: primero, se reduce la relación de contacto y se
obtiene un engrane ruidoso y áspero; segundo, se reduce el valor del módulo de sección en la
base del diente (aumentándose el esfuerzo), siendo ésta la parte más débil del diente (Ver
cálculo de engranajes).
2. Reducción del perfil del diente en su parte superior. Nuevamente el resultado se traduce en una
reducción de la relación de contacto.
3. Aumentando el ángulo de presión, disminuyéndose el diámetro de la circunferencia de base.
Con esto se incrementa la porción de la evolvente del perfil del diente y, por lo tanto, se elimina
la interferencia. Sin embargo, el aumento del ángulo de presión hace que se incremente la fuerza
de separación entre los engranes (ver 6.Cálculo de engranajes).
4. Los engranes pueden cortarse con dientes de adendo a corto y largo. Por ejemplo, el motor
puede fabricarse aumentándole el adendo (se disminuye proporcionalmente el dedendo)
mientras que al engrane impulsado se le disminuye el adendo. Obviamente, estos engranes no
son estándar, por esta razón no son intercambiables y resultan ser más caros.
Entonces, la interferencia debe eliminarse, pero el método a usar dependerá principalmente de la
aplicación y experiencia del diseñador.
Engranajess: Diseño y Cálculo
24
6. Diseño y cálculo de engranajes:
Se analiza el diseño de engranajes para resistir la falla por flexión de los dientes y el desgaste de las
superficies de los mismos. El diseño de engranajes es un problema difícil porque principalmente es
un procedimiento del método de tanteos. Sin embargo, hay varios métodos que pueden usarse para
desarrollar un diseño. Se seguirá un procedimiento de primer diseño por el procedimiento más
simple (ecuación de Lewis) y después se analizará y modificará este diseño por el método de la
AGMA. Este enfoque tiene la ventaja de mostrar los caminos disponibles sin forzar a decidir por
uno a usar en un procedimiento dado, más tarde, cuando hayan obtenido alguna experiencia, estarán
en posición de juzgar el método a seguir para obtener mejores resultados en un problema específico.
La determinación de los engranajes adecuados para usar en una aplicación particular constituye un
problema complejo en razón de los múltiples factores en juego. En primer lugar, los engranajes
deben operar sin interferencia de los dientes, con una apropiada longitud de contacto, y sin
demasiado ruido. La solución de este problema requiere el conocimiento de la geometría de los
mismos. En segundo lugar, los dientes de los engranajes deben ser capaces de transmitir las cargas
aplicadas sin fallar, y con un cierto margen de seguridad. Esto implica la capacidad para resistir no
solamente el esfuerzo correspondiente a la potencia transmitida, sino también para resistir los
incrementos de esfuerzo debidos al choque (inexactitud del contorno del diente, deformación del
mismo, aceleraciones), y a la concentración de tensiones en la raíz de los dientes, o resistencia a la
fatiga. En tercer lugar, debe considerarse la resistencia al desgaste.
Hasta aproximadamente 1932, el cálculo de los engranajes se basaba en la resistencia estática del
diente (Lewis), a fin de tener en cuenta las características de su fabricación y los esfuerzos
adicionales por impacto, se modificaba además la tensión de cálculo por un factor de velocidad
(Barth). Desde 1932, como un resultado de los estudios de Earle Buckingham, el cálculo se basa en
la carga dinámica, en el límite de fatiga del material y en el esfuerzo de desgaste. La base de cálculo
utilizada por los métodos actuales (AGMA, etc.) es la fórmula de la resistencia a la flexión tal como
fuera desarrollada por Wilfred Lewis.
6.1. Fórmula de Lewis:
Wilfred Lewis fue el primero que presentó una fórmula para calcular el esfuerzo por flexión en
dientes de engranajes, en la que interviene la forma de los mismos. Fue publicada en 1892 y en la
actualidad sigue siendo fundamental para la mayor parte del diseño de engranajes.
Antes de analizar el
método en sí, se
procede a estudiar
las
fuerzas
que
actúan
sobre
el
diente y los efectos
que producen en el
mismo.
La fuerza Fn que
actúa
entre
las
superficies
de
contacto
de
los
dientes
es
normal
a
Figura 41 – Esfuerzos en los dientes
las mismas, es decir,
está situada sobre la línea generatriz o línea de engrane, y su línea de aplicación se desplaza desde
la parte superior (o inferior) del diente hasta la parte inferior (o superior) del mismo, en la Figura 41
(a) se muestra cuando el contacto está justamente comenzando o terminando, que, considerando
éste como una viga en voladizo, es la posición en que produce las tensiones más altas cuando la
relación de contacto es igual a la unidad. En el punto en que la línea de engrane corta a la línea
Engranajess: Diseño y Cálculo
25
central o eje geométrico del diente, esta fuerza puede descomponerse en sus componentes
tangencial Ft y radial Fr, actuando perpendicular y paralelamente al eje del diente. La componente
radial produce esfuerzo de compresión sobre la sección transversal del diente y es absorbida por el
eje del engranaje y transmitida a los soportes. La componente tangencial produce un esfuerzo
flexionante y es la fuerza libre que hace girar la rueda conducida (Figura 41-c). Por lo general, el
esfuerzo de compresión es muy pequeño comparado con el flexionante de modo que puede ser
ignorado en la determinación de la resistencia del diente. Además, para justificar esta suposición,
incluir dicho esfuerzo hará que se aumente el esfuerzo por flexión en el lado de la compresión del
diente y que se disminuya el esfuerzo resultante en el lado de tensión. Para muchos materiales
usados en engranajes que son más resistentes a la compresión que a la tensión, la suposición dará
como resultado un diseño de diente más resistente. El argumento final que confirma el por qué se
ignora este esfuerzo es: debido a que los dientes están sujetos a falla por fatiga y las fallas por fatiga
empiezan en el lado de tensión del diente, el esfuerzo de compresión reduce el valor del esfuerzo
resultante de tensión y, por lo tanto, robustece más al diente.
El método de cálculo de Lewis utiliza las siguientes hipótesis simplificativas (Figura 42):
-
Al diente lo considera como una viga empotrada en el cuerpo del engrane.
Solicitado únicamente a la flexión.
La solicitación es estática.
La fuerza se encuentra distribuida uniformemente a lo largo del ancho del diente.
La posición más desfavorable de la fuerza Fn tiene lugar cuando el contacto se verifica en el
extremo de la cabeza del diente a calcular.
Figura 42 – Superficie resistente
Su objetivo es determinar la fuerza tangencial máxima que
puede transmitir el engranaje, es decir, la capacidad del
diente para la transmisión del movimiento.
Para determinar la sección más comprometida, que se
considerará como sección de empotramiento, se utiliza el
concepto de sólido de igual resistencia (forma que tendría
el diente para que todas sus secciones transversales
estuvieran igualmente solicitadas).
Para una viga empotrada, en su extremo fijo VE (Figura
41-a), actuando Ft sobre B con un brazo de palanca h,
siendo la sección resistente del diente de un ancho t y largo
b, es esfuerzo puede obtenerse como:
= momento flector / módulo resistente = Ft h / ( b t2 / 6 )
Entonces, Ft = ( b t2 / 6 ) / h
En un diente de engrane de resistencia uniforme el esfuerzo es constante, y ya que el ancho del
engranaje y la carga son también constantes:
h = ( b / 6 Ft ) t2 = constante . t2
Está claro que es la ecuación de una parábola. La sección más débil del diente VGE, puede
obtenerse inscribiendo la parábola a través del punto B, y localizando los puntos para los cuales la
parábola es tangente al perfil del diente en V y en E. Por lo tanto la expresión para la Ft fue
obtenida para la sección de esfuerzo máximo ya que el diagrama de momentos flectores será el
mismo tanto para el diente como para el sólido de igual resistencia a la flexión y, en cualquier
sección por encima de ésta el diente estará en condiciones más favorables que dicho sólido por tener
mayor momento de inercia.
Engranajess: Diseño y Cálculo
26
Las dimensiones h y t que resultan incómodas se pueden reemplazar utilizando la proporción:
x/(t/2)=(t/2)/h
Por los triángulos semejantes BVG y GVH (de lados correspondientes perpendiculares), de donde:
h = t2 / ( 4 x )
Ft = b ( 2 x / 3 )
Entonces:
Como x es función del paso, puedo encontrar un valor independiente de su valor multiplicando y
dividiendo por el paso p, agrupando resulta:
Ft = b ( 2 x / 3 p ) p
Z
Ø = 14.5° Ø = 20° Stub Ø = 20° Ø = 25°
10
0.056
0.064
0.083
0.076
12
0.067
0.078
0.099
0.088
13
0.070
0.083
0.103
0.093
14
0.072
0.088
0.108
0.098
15
0.075
0.092
0.111
0.102
16
0.077
0.094
0.115
0.106
17
0.080
0.096
0.117
0.109
18
0.083
0.098
0.120
0.112
19
0.087
0.100
0.123
0.115
20
0.090
0.102
0.125
0.118
21
0.092
0.104
0.127
0.120
23
0.094
0.106
0.130
0.124
25
0.097
0.108
0.133
0.128
27
0.100
0.111
0.136
0.131
30
0.102
0.114
0.139
0.135
34
0.104
0.118
0.142
0.140
38
0.107
0.122
0.145
0.144
43
0.110
0.126
0.147
0.148
50
0.112
0.130
0.151
0.152
60
0.114
0.134
0.154
0.156
75
0.116
0.138
0.158
0.161
100
0.118
0.142
0.161
0.166
150
0.120
0.146
0.165
0.171
300
0.122
0.150
0.170
0.176
Cremallera
0.124
0.154
0.175
0.180
Tabla 4 – Factor de forma y
Debido a que x y p son propiedades
geométricas que dependen del tamaño y forma
del diente, es posible definir un factor:
y =2x/3p
Que es llamado factor de forma, cuya
magnitud depende de la forma del diente (que
es función del número de dientes para un valor
particular del ángulo de presión Ø) y del punto
de aplicación de la carga. La ecuación de
Lewis se puede escribir:
Ft = b y p
ó
Ft = b ( Y / Pd )
Siendo:
p = / Pd
y Y=y
Los valores del factor de forma y han sido
calculados para los sistemas de engranes
estándar y están disponibles en la Tabla 4.
Si se adoptan otra forma de los dientes, se dibuja el perfil a escala adecuada y puede determinarse
por tanteos la sección para la cual se obtiene el valor mínimo del segmento x, dado que la sección
comprometida corresponde al menor valor de y. Se debe elegir cualquier punto V cerca de la parte
más estrecha del diente, trazar BV y luego VH perpendicular a la anterior, trazar además VG
perpendicular al eje del diente, e interpretar a escala GH, repetir la operación para varios puntos
cercanos a V. Con unas pocas pruebas se determinará el valor mínimo de GH, o sea de x.
La carga tangencial máxima admisible, objetivo de Lewis, puede ahora obtenerse si se conoce el
valor del esfuerzo admisible utilizado del material del engrane. Para evitar confusión, designamos
como Fb a la carga admisible y, entonces, la ecuación de Lewis se puede escribir:
Fb = b y p adm
La tensión de trabajo admisible en la ecuación de Lewis, depende del material, del tratamiento
térmico, de la exactitud de fabricación, y de la velocidad periférica de la circunferencia primitiva.
Usualmente se supone que son un tercio de la resistencia a la rotura (Tabla 5).
Engranajess: Diseño y Cálculo
27
adm [Kg/cm2]
HB
ASTM 25
560
174
ASTM 35
840
212
ASTM 50
1055
223
0.20% C (sin tratamiento térmico)
1400
180
0.20% C (templado en agua y revenido)
1750
250
SAE 1020 (endurecimiento sup. y templado en agua y revenido)
1260
156
SAE 1030 (sin tratamiento)
1400
180
SAE 1035 (sin tratamiento)
1600
190
SAE 1040 (sin tratamiento)
1750
202
SAE 1045 (sin tratamiento)
2100
215
SAE 1045 (endurecido por templado en agua y revenido)
2250
205
SAE 1050 (endurecido por templado en aceite y revenido)
2460
223
SAE 2320 (endurecimiento sup. y templado en agua y revenido)
3500
225
SAE 2345 (endurecido por templado en aceite y revenido)
3500
475
SAE 3115 (endurecimiento sup. y templado en aceite y revenido)
2600
212
SAE 3145 (endurecido por templado en aceite y revenido)
3700
475
SAE 3245 (endurecido por templado en aceite y revenido)
4550
475
SAE 4340 (endurecido por templado en aceite y revenido)
4550
475
SAE 4640 (endurecido por templado en aceite y revenido)
3870
475
SAE 6145 (endurecido por templado en aceite y revenido)
4725
475
SAE 43 (ASTM B147-52, 8ª) (manganeso bronce)
1400
100
SAE 62 (ASTM B143-52, 1ª) (bronce de cañón)
700
80
SAE 65 (ASTM B144-52, 3C) (fósforo bronce)
840
100
SAE 68 (ASTM B148-52, 98) (aluminio bronce tratado term.)
1540
180
Material
Fundición gris
Acero fundido (bajo carbono)
Acero al carbono forjado
Aceros aleados
Materiales a base de Cobre
No metales
Baquelita, Micarta, Cederrón
420
Tabla 5 – Tensiones Admisibles de la ecuación de Lewis
2.5 p < b < 4 p ó
Cuando dos engranajes son
del mismo material, el
diente del piñón es más
débil (yp < yg), cuando los
materiales son diferentes, se
admite que el diente de
menor adm . y es el más
débil.
La obtención de la ecuación
de Lewis está basada en el
supuesto de que la carga
esté
distribuida
uniformemente en todo el
ancho. Algunas veces esto
dista mucho de la realidad,
debido a desalineación o
alabeo de los dientes,
soportes elásticos, etc. Una
causa de rotura del diente es
la concentración de la carga
en un extremo de su ancho,
lo que origina esfuerzos
mayores que cuando la
carga está distribuida. Para
paliar
esta
clase
de
perturbación, el ancho de la
cara b no debe ser
demasiado
grande
en
comparación con el paso p
del diente ( b = . p ). En
ausencia de consideraciones
especiales, se consideran
como buenas las siguientes
proporciones:
8 M < b < 12.5 M (condiciones normales b=10 M)
Los límites arriba señalados son sólo sugerencias, y podrá haber muchas excepciones. Sin embargo,
el diseñador deberá investigar muy bien los posibles efectos de la distribución no uniforme de la
carga cuando se excedan los límites recomendados. Entre las excepciones se puede mencionar, por
ejemplo, los engranajes de transmisión de automóviles que tienen caras más cortas por ser necesaria
una disposición compacta. En general, cuanto más ancho es el diente y más rígido el material del
mismo, más exactos deben ser los perfiles y la alineación del eje para conseguir una larga duración
y un funcionamiento exento de averías. A fin de evitar una concentración de la carga en un extremo
de un diente, éstos se hacen a veces “bombeados”, es decir, se raspan o cepillan con una reducción
elíptica desde el centro del diente hasta el extremo de aproximadamente 0.0003 cm por cm en cada
lado.
Ahora, es necesario considerar el efecto de otra suposición hecha en la determinación de la ecuación
de Lewis. Se supuso que la carga total transmitida actúa en la parte superior del diente. Debido a
que casi todos los engranajes están diseñados con una relación de contacto superior a 1.2, es claro
que cuando la carga actúa sobre la parte superior de un diente, otro diente continúa en contacto, y la
Engranajess: Diseño y Cálculo
28
carga total no actúa solamente en un diente. El estudio de los dientes en movimiento muestra que
las cargas más altas se presentan aproximadamente en la parte media del diente. Por lo tanto, el
esfuerzo máximo probablemente se producirá mientras un solo par de dientes soporta la carga
completa en un punto donde otro par se encuentra a punto de hacer contacto. En la Figura 41 (b) se
ha desplazado la carga desde la parte superior del diente hasta un punto cerca del centro del diente.
La obtención de la ecuación de Lewis se puede hacer igual que antes. La única diferencia que se
tiene es en los valores del factor de forma. Esta forma de la ecuación reduce el tamaño y el peso de
los engranes porque se usa un esfuerzo real menor. Sin embargo, se usa sólo para aquellos diseños
donde la reducción de peso y tamaño es de mucha importancia.
La capacidad del diente para transmitir el movimiento en un diseño
adecuado debe ser igual o superior a la fuerza tangencial (Ft, P en la
figura) necesaria para la transmisión del movimiento. Esta se
obtiene por la potencia o por el momento torsional aplicado, dado
que en el proyecto se conoce ordinariamente la potencia transmitida
y las velocidades angulares de los engranajes. Aunque la fuerza
aplicada varía algo cuando el punto de aplicación se desplaza desde
la parte superior al fondo del diente (o viceversa), en el proyecto se
utiliza la fuerza nominal actuante en la circunferencia primitiva
Figura 43 – Fuerza tangencial
(Figura 43), además, el brazo de palanca de Fb es algo mayor que el
radio primitivo, entonces al adoptar la posición tangente a la primitiva para compararla con Ft se
está en una posición más segura, por otra parte la diferencia no es importante y no existe interés
práctico en considerarla. En función de la potencia transmitida N, del número de revoluciones por
unidad de tiempo de la rueda dentada w y del radio primitivo R, es posible calcular Ft:
N = Ft . Vt = Ft . R . w = Mm . w
→ Mm[Nm] = Ft [N] . R[m] = N[W] / w[rad/s]
Siendo w[rad/s] = 2 ¶ n[rpm] / 60, y expresando en las unidades correspondientes, resulta:
Ft [N] = 9.55 N [W] / ( n [rpm] . R [m] ) - Ft [Kg] = 71620 N [HP] / ( n [rpm] . R [cm] )
Debiendo verificarse:
Fb Ft
Como la fuerza tangencial que resiste el diente debe ser por lo menos igual a la fuerza tangencial
que lo solicita a la tensión, igualando dichos valores y teniendo en cuenta que:
Para
b= p
, resulta
y como Dp = ( p / ) Z , resulta
Fb = y p2 adm
Ft = 71620 N / [ n ( p Z / 2 ) ] = 450.000 N / ( n p Z )
Esta expresión es útil para hacer el prediseño del engranaje ya que
será el valor mínimo a adoptar para las verificaciones que se tratan
más adelante, y el valor final del paso se alejará de éste en tanto y en
cuanto las condiciones reales de funcionamiento difieran de las
supuestas por Lewis.
Como la potencia y el número de revoluciones, así como la relación de transmisión, son
condiciones a cumplir por el diseño, es decir: son datos, deben adoptarse: el ángulo de presión (ver
5.4, generalmente 20°), el material para el engranaje y el número de dientes a utilizar según
recomendaciones o criterios adecuados a tal efecto, por ejemplo, adoptar el número mínimo de
dientes necesarios para que no se produzca interferencia a fin de obtener las mínimas dimensiones
exteriores (Tabla 2).
Engranajess: Diseño y Cálculo
29
Con el valor obtenido se calcula el módulo, el cual se redondea hasta el valor estandarizado
inmediato superior; después de esto, por los valores de y Z, se determinan los diámetros de las
ruedas y su ancho, luego de acuerdo a las proporciones estándar (ver 5.4) se obtienen las restantes
dimensiones: diámetro exterior e interior, etc.
6.2. Fórmula de Lewis-Barth:
Cuando un engranaje funciona a velocidades moderadas o altas y se genera ruido, es seguro que
existen efectos dinámicos.
Puesto que los perfiles de los dientes no son evolventes perfectas, y puesto que la separación entre
los dientes no es rigurosamente exacta, que además el árbol y sus soportes se deforman bajo carga y
que una carga deforma a los dientes aunque inicialmente sean perfectos, la ley de engrane no se
cumple rigurosamente y es inevitable que se produzcan aceleraciones locales y por lo tanto se
originan cargas dinámicas.
Después que Lewis enunció su ecuación para la resistencia de los dientes de engranaje, la
experimentación demostró que es necesario aplicar un coeficiente de velocidad para obtener un
esfuerzo de cálculo a fin de llegar a un mejor acuerdo entre los cálculos de proyecto y los resultados
de ensayo, lo que equivale a decir que la carga dinámica es función únicamente de la velocidad.
Esto no es rigurosamente cierto, pero sí lo es aproximadamente en intervalos limitados de velocidad
y para una clase particular de engranajes que los coeficientes de velocidad se utilizan todavía
ampliamente.
Carl G. Barth, investigador del siglo XIX, fue el primero que expresó el factor de velocidad
(denominado factor dinámico) en la ecuación:
Kv = 183 / ( 183 + vp )
Donde vp [m/min] es la velocidad en la circunferencia primitiva. Esta ecuación se conoce como
ecuación de Barth, y se sabe que está basada en pruebas de engranes de hierro fundido con dientes
colados. También es altamente probable que se llevaran a cabo pruebas con respecto a dientes de
perfil cicloidal, en vez de perfil de evolvente. Los dientes cicloidales eran de uso general en aquella
época debido a que se podían producir por fundición más fácilmente que los de evolvente.
Este factor afecta directamente a la tensión admisible del material (disminuyendo su valor), con lo
que la expresión de Lewis-Barth resulta:
Fb = b y p adm Kv
Y se aplica para engranajes industriales corrientes que operen a velocidades de hasta 600 m/min.
La ecuación de Barth a menudo se modifica a la forma:
Kv = 366 / ( 366 + vp )
Para engranajes exactamente tallados que operen a velocidades de hasta 1200 m/min;
𝐾𝑣 =
43
43 + 𝑣𝑝
Para engranajes de precisión, tallados con un alto grado de exactitud, y que operen a velocidades de
1200 m/min y mayores.
Engranajess: Diseño y Cálculo
30
6.3. Fórmula de Buckingham – Cargas dinámicas:
Hasta aproximadamente 1932, el cálculo de los engranajes se basaba en la resistencia estática del
diente. A fin de tener en cuenta las características de fabricación del diente y los esfuerzos
adicionales por impacto, se modificaba además la tensión de cálculo por un factor de velocidad.
Desde 1932, como un resultado de los estudios de Earle Buckingham, el cálculo de los engranajes
se basa en la carga dinámica, en el límite de fatiga del material y en el esfuerzo de desgaste. En
1949 Buckingham publicó su “Analytical Mechanics of Gears”, donde propuso una nueva ecuación
para calcular el esfuerzo dinámico, basada en la determinación de la masa efectiva actuante sobre
las circunferencias primitivas de los engranajes, en los esfuerzos debidos a las aceleraciones, en la
discriminación de perfiles, y en las cargas de impacto. Sin embargo, el método presentado en lo que
sigue es el primero, en razón de que al presente es el más universalmente usado.
Como se ha mencionado, los pequeños errores del tallado, y la deformación de los dientes bajo
carga, originan aceleraciones, por lo tanto fuerzas de inercia, y fuerzas de impacto sobre los dientes,
con un efecto similar a aquel de una carga variable superpuesta a una carga constante. El esfuerzo
máximo total instantáneo sobre el diente, o esfuerzo dinámico, está constituido por la carga
transmitida más un incremento dinámico de carga. Puesto que su magnitud depende de las masas de
los engranajes, sólo se puede aplicar a una cierta clase de engranajes. Así, para engranajes de masa
normal con masas conectadas, también de tipo normal:
Pd [ Kg ] Ft Fi Ft [ Kg ]
0,113 vt [ m / min] C [ Kg / cm] b[ cm] Ft [ Kg ]
0,113 vt C b Ft
Donde C es el factor dinámico, que depende de la magnitud del error y de los módulos de
elasticidad de los engranajes (E1 y E2 [Kg/cm2]):
C[Kg/cm] = k[cm] E1 E2 / ( E1 + E2 )
Siendo k función del error efectivo o total compuesto del diente e, que debe ser menor a velocidades
más altas. k = 0,107 e para dientes de 141/2 ° y altura completa, k = 0,111 e para dientes de 20 ° y
altura completa, k = 0,115 e para dientes cortos de 20 °.
Aun cuando la fuerza exterior que actúa sobre el engranaje sea constante, la carga que incide sobre
cada uno de los dientes es variable en el tiempo, porque el contacto de cada diente se verifica en una
fracción de la vuelta completa del mismo. Para tener en cuenta este efecto se toma como tensión de
comparación el límite de fatiga admisible a la flexión, en la Tabla 6 se dan valores de límites de
Límite de fatiga fatiga (lím). La carga dinámica así determinada se
Material
HB
introduce en la fórmula de Lewis, resultando el
lím [Kg/cm2]
estado de tensiones:
Fundición gris
160
840
Semiacero
Bronce fosforoso
200
100
1260
1680
Acero
150
200
240
250
280
300
320
350
360
400
2520
3500
4200
4340
4900
5250
5600
5950
6300
7000
lím = 17,5 x HB
para HB > 400
lím = 7000
Tabla 6 – Límites de fatiga
d = Pd / ( b y p ) lím adm
En la Figura 44 se dan los errores máximos que
permiten un funcionamiento relativamente suave
para distintas velocidades tangenciales de la
circunferencia primitiva (vp).
Conociendo el método de fabricación del diente
requerido, el error probable se elige de la Figura 45
y C de la Tabla 7.
Engranajess: Diseño y Cálculo
31
Cuanto mayor sea vp, mayores
son las reacciones dinámicas
que se originan por los errores
diversos de los dientes. Por
otra parte, la magnitud
relativa del ruido de un par de
dientes metálicos conjugados
es un indicador o índice de la
magnitud de los errores: en
general, cuanto más intenso es
el ruido para una velocidad,
paso
y
ambiente
determinados, mayor es el
error. Las altas velocidades
requieren, pues, mayores
exactitudes para que el
funcionamiento
sea
satisfactorio. En la Figura 44
se
observa
que
para
velocidades más altas de 1500
m/min, el error del diente
debe ser del orden de 0,00127
cm; la Figura 45 sugiere que
los dientes pequeños (módulo
<
5
mm)
son,
por
consiguiente, ventajosos.
Figura 44 (arriba) Errores máximos - Figura 45 (abajo) Errores probables
Materiales
Forma del
diente
Fundición y Fundición
Fundición y Acero
14,5°
Acero y Acero
Fundición y Fundición
Fundición y Acero
20°
Acero y Acero
Fundición y Fundición
Fundición y Acero
Acero y Acero
20° mocho
0,00127
0,00254
Error
[cm]
0,00508
0,00762
71,4
142,9
285,8
428,6
98,2
196,5
392,9
589,4
142,9
285,8
571,5
857,3
74,1
148,2
296,5
444,7
101,8
201,8
407,2
610,8
148,2
296,5
592,9
889,4
76,8
153,6
307,2
460,8
105,4
210,7
421,5
632,2
153,6
307,2
614,4
921,6
El semiacero y el bronce tienen aproximadamente los mismos valores que la fundición.
Tabla 7 – Factor dinámico C [Kg/cm]
La manera de utilizar las
mencionadas figuras en el
proyecto
es
determinar
previamente
el
error
admisible por la Figura 44,
después de haber sido
calculada la velocidad. Esto
es una indicación de la
exactitud
necesaria
de
fabricación. Después, una vez
conocido o supuesto el
módulo, se entra en
la Figura 45, se
0,01016
0,01270
571,5
714,4 decide acerca de la
de
785,8
982,0 calidad
1143,0
1428,8 fabricación y se usa
592,9
741,2 el
valor de e
814,4
1018,0 deducido
por la
1185,9
1482,4 curva
inferior
614,4
768,0 inmediata,
en el
843,0
1053,7 cálculo de C en la
1228,8
1536,0 ecuación
de
Buckingham.
Engranajess: Diseño y Cálculo
32
En general, los dientes no deben ser más exactos que lo necesario a causa de que frecuentemente
una mayor exactitud implica mayor costo, lo cual indica la conveniencia del uso en el proyecto del
error admisible siempre que éste sea menor que el correspondiente a dientes tallados de tipo
comercial.
En la Figura 45, la curva designada como Engranajes comerciales de primera clase representa los
resultados que se pueden esperar de los engranajes cortados mediante fresas circulares de forma o
tornillo-fresa cilíndrico o fresas-madre, si se pone el cuidado necesario para realizar la tarea y si las
máquinas y las herramientas están en buen estado.
La curva designada Engranajes tallados esmeradamente (o clase 2) representa los resultados que se
pueden obtener con fresas-madre o herramientas cuchilla-piñón afiladas con precisión, cuando el
corte de acabado se efectúa en un lado y después en el otro.
La curva designada Engranajes de precisión (o clase 3) representa el grado de exactitud que se
puede esperar en dientes esmerilados cuidadosamente o raspados, o dientes tallados con un cuidado
extremado empleando fresas exactamente afiladas y montadas en máquinas conservadas en las
mejores condiciones. Con dureza Brinell de hasta 450, los dientes deben ser acabados por raspado,
que es un proceso de acabado de precisión. Puede producir el perfil de evolvente con una tolerancia
de 0,0005 cm y un error de separación dentro de 0,0007 cm. La operación de raspado debe hacerse
preferiblemente antes del tratamiento térmico. En condiciones favorables, el error puede ser
reducido hasta 0,0007 a 0,0010 cm por rectificado. El raspado es el proceso más rápido y el
rectificado el más lento.
Cuando los engranajes son tratados térmicamente después de tallados los dientes, el error de perfil
aumenta. En condiciones del más cuidadoso control, el aumento de error debido al tratamiento
térmico se ha mantenido tan pequeño como 0,0012 cm. Para tratamientos térmicos de menos
exactitud, el alabeo puede ser considerablemente mayor; en algunos casos, tanto que los dientes
tratados térmicamente no rectificados tienen una vida más corta que los dientes no tratados
térmicamente. Para un servicio exacto de alta capacidad, los dientes templados deben ser acabados
por rectificado.
Fi tiene en cuenta el efecto dinámico derivado de los errores de trazado, que se manifiestan
cualquiera sea la naturaleza de las fuerzas exteriores que actúan sobre el engranaje. Debe
considerarse también el incremento de carga debido a la aplicación dinámica de las cargas. Este
efecto ha sido tenido en cuenta en el método de Lewis-Barth. También podría tenerse en cuenta en
el método de Buckingham al calcular P, pero es más común considerarla comparando la carga
dinámica Pd que soporta el diente con la resistencia estática del diente a la flexión Fb. Algunos
autores, entre ellos Kimbell, adoptan este criterio, debiendo cumplirse en un correcto diseño:
k Pd Fb
Siendo k = 1.25 para cargas constantes, 1.35 para cargas oscilantes y 1.50 para cargas aplicadas en
forma violenta.
Los llamados engranajes de tipo normal o promedio pueden distinguirse mejor si se menciona
primero aquellos que no son de este tipo, por ejemplo los empleados en aeronáutica, en que las
masas móviles, considerando las cargas respectivas, son menores que las de tipo medio y los
engranajes están conectados por ejes cortos a volantes pesados cuyas masas y rigidez son mayores
que las promedias. También los engranajes pequeños que transmiten baja potencia, o los de alta
velocidad ligeramente cargados. La influencia predominante que existe sobre los engranajes de gran
tamaño y velocidad moderada es la de las masas conectadas. Pero para pequeños engranajes,
especialmente los montados sobre ejes pequeños que se retuercen fácilmente con un ángulo de
Engranajess: Diseño y Cálculo
33
deformación que es equivalente al error efectivo de diente, las masas de los propios engranajes es el
factor predominante, y la carga dinámica es mucho menor que la dada por la ecuación dada.
No hay manera fácil de definir una línea divisoria entre las diferentes categorías, pero si el eje es tan
pequeño como 1,27 cm (y probablemente hasta 5 cm), el engranaje seguramente pertenecerá a esta
categoría (no es del tipo promedio). Si la potencia es menor que 10 ó 20 CV, el uso de la ecuación
será excesivamente previsor. Para estas pequeñas potencias se recomienda aplicar las ecuaciones de
Lewis-Barth, para la carga dinámica. Como el origen de estas ecuaciones es distinto, no es lógico
esperar que las cargas dinámicas coincidan, excepto en ciertas condiciones de funcionamiento.
Se ha desarrollado un considerable trabajo de investigación sobre las cargas dinámicas que actúan
sobre los dientes de los engranajes. La mayoría de las investigaciones, por no decir que la totalidad,
no están completamente de acuerdo sobre la manera de evaluar los efectos de las cargas dinámicas.
Sus trabajos hacen destacar el hecho de que no ha sido encontrado un método eficiente para la
determinación de las cargas dinámicas y el diseñador queda abandonado a sus propios recursos, se
han tenido que basar en experiencias pasadas, aplicando niveles de esfuerzos más bajos que los
permitidos, factores de seguridad para el servicio, valores experimentales aplicables dentro de
límites estrechos para casos específicos, etc., con el fin de asegurar el éxito en el funcionamiento de
sus engranajes.
Observando el problema desde el punto de vista estricto del diseño se estima que la teoría de
Buckingham sobre las cargas dinámicas, es el método más apropiado que se debe seguir,
considerando el estado actual de las investigaciones. Sin embargo, el establecimiento de nuevas
teorías irrebatibles y un número mayor de investigaciones físicas revelan que las aproximaciones
fijadas por Buckingham resultan anticuadas, aun cuando hasta la fecha parecen ser el método más
lógico y directo de asegurar a los usuarios, que los engranajes diseñados, probados y embarcados,
funcionarán en el sitio de trabajo de acuerdo con lo prescrito.
6.4. Concentración de Tensiones:
La identificación de la raíz del diente con la corona se realiza por
medio de una transición curva cuyo radio suele estar estandarizado en
función del módulo y del tipo de dentado. A pesar del acuerdo curvo,
tiene lugar en la sección de empotramiento un efecto de concentración
de tensiones.
Figura 46 – Concentración de tensiones
Consecuencia de este efecto es que una parte de las roturas de
engranajes se deben a fisuras que se producen en la zona de
concentración. El valor exacto del factor de concentración de
tensiones depende del material, del espesor del diente en la raíz, de la
posición del esfuerzo sobre el diente, del radio de acuerdo y del
ángulo de presión. A causa de esta complejidad, los coeficientes que
se usan ordinariamente son estimaciones razonables de los valores
verdaderos. Dolan y Broghamer propusieron las siguientes ecuaciones
empíricas de acuerdo con sus estudios foto elásticos:
Kt = 0.22 + ( a / )0.2 ( a / h )0.4
Figura 47 – Estudios fotoelásticos
Kt = 0.18 + ( a / )0.15 ( a / h )0.45
Kt = 0.14 + ( a / )0.11 ( a / h )0.5
para = 14 ½ °
para = 20 °
para = 25 °
Siendo el radio del filete en la raíz del diente, a el espesor del diente en la base del mismo y h la
distancia medida por arriba de la sección débil del diente hasta la línea de acción de la carga.
Engranajess: Diseño y Cálculo
34
Debido a que la concentración de tensiones obtenida a partir de las ecuaciones anteriores es para un
diente de engrane sujeto a esfuerzo estático y a que el engrane está además sujeto a esfuerzos por
fatiga, los factores obtenidos deberán modificarse por factores de sensibilidad a las entallas (q,
Kf=1+ q (Kt – 1) ), pero cuando los dientes están templados o endurecidos, el valor de q es casi igual
a la unidad, excepto para radios muy pequeños, también para los aceros aleados de alta resistencia;
para los aceros al carbono y de baja aleación oscila entre 0.6 y 0.8; para las fundiciones grises es
igual a cero. Con un coeficiente de reducción de resistencia Kf, la ecuación de Buckingham se
convierte en:
= Kf Pd / ( b y p ) lím adm
Buckingham enuncia que si se supone que la carga actúa en la punta del diente (Fb) y se establece
comparación con su carga dinámica, esto es tan previsor que no es necesario coeficiente alguno de
concentración de tensiones. El valor de Kf generalmente está en el intervalo de 1,2 a 1,7 cuando se
aplica la carga en la punta del diente, pero es más alto, 1,4 a 2 por ejemplo, cuando la carga se
aplica cerca de la parte central.
6.5. Fallas de los dientes de engranajes:
Un buen diseñador de engranajes debe poder reconocer y analizar las fallas propias de los engranes.
Las fallas deben ser debidamente investigadas, tomando las medidas de corrección necesarias,
procurando también que estos datos sirvan de base para posteriores experiencias.
Figura 48 – Tipos de fallas
La capacidad operativa de un
engranaje viene determinada por su
diseño
y
las
variables
de
funcionamiento
como
ser:
temperatura de trabajo, materiales de
construcción, velocidad y torque. Es
el aceite lubricante el que debe cubrir
los requerimientos de fricción para
minimizar los efectos del desgaste y
rotura acelerada.
En un engranaje hay cuatro tipos de
fallas características: por desgaste,
picadura
(pitting),
deformación
plástica y rotura del diente. En la
Figura 48 se representa una curva
típica, donde, en función de la
velocidad
y
torque,
quedan
delimitadas las zonas de falla según
sea la condición operativa.
6.5.1. Desgaste:
Es un fenómeno de mucha importancia, sobre todo para aquellos engranajes de alta velocidad que
tienen que funcionar durante períodos ilimitados de tiempo.
El desgaste queda definido como el deterioro que sufren los dientes y por el cual son removidas de
sus superficies capas de metal, de manera más o menos uniforme.
Las causas más comunes del desgaste son: contacto de metal contra metal, como consecuencia de
una película inadecuada de aceite lubricante; la presencia de partículas abrasivas en el suministro
del aceite; desplazamiento de la película de aceite en el área de contacto ocasionando un desgaste
rápido o la formación de rayas o estriado; y el desgaste de origen químico, provocado por la
composición del aceite y de sus aditivos.
Engranajess: Diseño y Cálculo
35
Las áreas marcadas con 1, 2 y 3 (Figura 48), son las zonas en donde ocurren los desperfectos en
combinación con el fenómeno del desgaste. En el área 1, el engranaje no gira con la rapidez
necesaria como para formar una película de aceite, mientras que en la zona del área 2 la velocidad
tiene la suficiente rapidez como para formar dicha película y el engranaje marchará así durante un
período de tiempo indefinido, en el supuesto caso de que el aceite esté enteramente libre de
materiales extraños y no sea corrosivo. En el área 3 se producirá el rayado o escarificado (scoring)
con rapidez, puesto que aquí la carga y la velocidad son lo suficientemente altas para romper la
película de aceite destinada a la lubricación.
Hay que tener en cuenta, para el área 1, que si bien se puede aumentar la velocidad de
funcionamiento (para trabajar en la zona sin fallas), también se incrementa la fricción y la
temperatura debido al calor generado (aumenta con el cuadrado de la velocidad), lo que hace
necesario refrigerar la caja de engranajes con: intercambiadores de calor, disipadores, mayor caudal
y/o volumen del cárter de aceite para mantener la viscosidad del aceite dentro de los parámetros
recomendados, también se puede recurrir a aceites de mayor viscosidad o al uso de aditivos
mejoradores de fricción.
El escarificado (área 3) ocurre cuando el calor generado por la fricción de los dientes es tan grande
como para romper la película de lubricante, produciéndose entonces el contacto metal-metal,
elevada fricción con aumento de la temperatura hasta producir la fusión y soldadura de los
materiales de las superficies. Para atenuar su efecto se debe recurrir a: modificar condiciones
operativas (operar a menor régimen), disminuir la viscosidad del aceite (al valor mínimo
recomendado) y aumentar el caudal de lubricación para obtener una mayor refrigeración.
6.5.2. Deformación plástica:
Los engranajes pueden fallar a consecuencia del deslizamiento plástico, cuando la superficie cede y
se deforma debido a cargas demasiado pesadas.
Por lo general este tipo de falla se produce cuando los engranajes están hechos de materiales suaves
o semiduros. En general se caracteriza por la presencia de material laminado que sobresale de las
puntas de los dientes. También se pueden formar ondulaciones y surcos.
Por lo regular se pueden mejorar estas condiciones de trabajo agregando al aceite lubricante aditivos
para presiones extremas, mejorando simultáneamente la distribución del aceite. La reducción de la
carga que se transmite es un paliativo, aún cuando no siempre es practicable.
6.5.3. Fatiga superficial o picado (pitting):
Está considerada como una falla de la superficie que sobreviene al ser superado el límite de la
resistencia superficial de los materiales. Los engranajes que funcionan con carga, desarrollan
esfuerzos superficiales constantes y si las cargas tienen la suficiente intensidad y el ciclo de
esfuerzos se repite con bastante frecuencia, sobreviene la fatiga en algunos fragmentos del metal en
la superficie, dando origen a las picaduras. La mayor parte de las fallas por picado de dientes se
debe a un mal diseño del engranaje, incorrecta selección del material constructivo y condiciones
operativas extremas (área 4 de la Figura 48).
Figura 49 – Tensiones tangenciales
La carga aplicada se distribuye en una pequeña área, las tensiones de
contacto que se desarrollan en esas superficies de contacto dan lugar
a un campo de tensiones normales y tangenciales en el interior del
diente. Como las tensiones de contacto son variables lo serán también
las del campo interior, de las cuales las más importantes son las
tangenciales y de éstas las correspondientes a elementos superficiales
orientados a 45° respecto de las tensiones de contacto (Figura 49).
Las máximas tensiones tangenciales se producen en las proximidades
Engranajess: Diseño y Cálculo
36
de la superficie de contacto, a una distancia del mismo orden que la deformación derivada de la
acción de las cargas, y dan lugar a un fenómeno de fatiga y conducen a la formación de pequeñas
fisuras en cualquier irregularidad estructural, desarrollándose gradualmente, éstas salen a la
superficie formando una erupción puntual. En la ulterior etapa los defectos puntuales se agrandan y
se fusionan en cadenas; en los sectores entre las cadenas se exfolian y desmenuzan las partículas
gruesas de metal. Este fenómeno se llama picadura.
Producido el picado, el fenómeno es luego creciente por cuanto al reducirse las superficies en
contacto se incrementan las tensiones, acelerándose la formación de pocitos o picaduras derivadas
de la fatiga del material. El aumento de la velocidad del movimiento relativo (rodamiento con
resbalamiento) ejerce en cierto grado influencia favorable: la capa deteriorada, en el proceso de
desgaste, se elimina gradualmente, gracias a lo cual no surge el desmenuzamiento. La duración
depende de la intensidad del desgaste abrasivo que varía en el curso del tiempo la forma primaria de
las superficies de contacto. La picadura se concentra en los sectores del diente próximos al círculo
primitivo, dado que en esos sectores soporta la carga él solo; en los sectores próximos a la cabeza y
a la raíz, la carga la reciben dos dientes. Además, en los sectores centrales del perfil tiene lugar
rodamiento sin resbalamiento, mientras que en los sectores de la cabeza y de la raíz tiene lugar
también el resbalamiento, estos sectores se someten a una acción bruñidora de las superficies
conjugadas que eliminan los deterioros superficiales, pero con el tiempo conduce a la distorsión del
perfil evolvente. También la presencia de lubricante contribuye a la división de las superficies
metálicas.
Dada la complejidad de factores existen varias teorías para explicar el fenómeno además de la
enunciada, aun prescindiendo del origen del picado, lo real e importante es que se ha determinado
experimentalmente que después de un cierto número de revoluciones, si el engranaje no es apto para
resistir el desgaste, sufre un picado superficial.
Salvo que en el engranaje se haga notorio un desalineamiento considerable, que en la mayoría de
los casos puede ser corregido, la presencia de picaduras significa que el diseño no corresponde a la
capacidad de carga que se transmite y de ser éste el caso, es necesario dar los pasos que procedan
para mejorar la capacidad de carga, por ejemplo, los engranes de endurecimiento medio pueden ser
sometidos a un endurecimiento máximo, lo que aumentará el límite de resistencia de la superficie
del material. También puede sustituirse el material de los engranes, ya sea por un metal nitrurizado
de alta capacidad de resistencia o por otro carburizado superficialmente. Con
frecuencia, los cambios de material y de tratamiento térmico no son suficientes y
es preciso rediseñar el engranaje.
El aumento del ancho reducirá la carga por centímetro cuadrado de
cara de los dientes, aumentando así la resistencia contra las
picaduras. Buckingham encontró una buena correlación entre el
fallo por fatiga superficial y el esfuerzo de contacto de Hertz cuando
el contacto tiene lugar en el punto primitivo. Entonces, para deducir
la ecuación de desgaste de Buckingham se parte de la ecuación de
Hertz para calcular el esfuerzo en la superficie de dos cilindros en
contacto rodante, quien se basó en la hipótesis de que la distribución
de esfuerzos normal a la superficie de contacto es elíptica. En la
Figura 50 – Cilindros en contacto
Figura 50 se muestran dos cilindros y las dimensiones usadas para
obtener la ecuación de esfuerzo de Hertz:
2 = F ( 1 / r1 + 1 / r2 ) / b { [( 1-12) / E1] + [(1-22) / E2] }
Dónde:
: esfuerzo en la superficie
r1 : radio del cilindro menor
: relación de Poisson
b : longitud de contacto de los cilindros
r2 : radio del cilindro mayor
E : módulo de elasticidad
Engranajess: Diseño y Cálculo
37
Entonces, si F es sustituida por la carga
admisible al desgaste Fw, r1 y r2 por rcp y
rcg que son los radios de curvatura de los
dientes de los respectivos engranes (piñón
y engrane) en el punto de contacto y σ por
Sc que es el límite de fatiga superficial,
teniendo en cuenta que rc = r sen Ø
(Figura 51), y suponiendo que los
engranajes son hechos de materiales que
tengan el mismo valor de relación de
Poisson = 0.3 (es un valor razonable
para casi todos los engranes metálicos),
resulta:
Figura 51 – Relaciones entre radios
K [lb/plg2]
Sc
Materiales del piñón y del engrane
[lb/plg2]
14,5°
20°
25°
50.000
60.000
70.000
80.000
90.000
100.000
110.000
120.000
130.000
140.000
150.000
30
43
58
76
96
119
144
171
196
233
268
41
58
79
103
131
162
196
233
270
318
366
51
72
98
127
162
200
242
288
333
384
453
50.000
70.000
90.000
59.000
65.000
85.000
90.000
83.000
44
87
144
46
73
135
193
170
60
119
196
62
100
184
264
234
74
147
242
77
123
228
327
288
Acero y Acero HB promedio
Sc2 sen Ø ( 1 / Ep + 1 / Eg )
Fw = ----------------------------------0.35 ( 1 / rp + 1 / rg )
para piñón y engrane
150
175
200
225
250
275
300
325
350
375
400
Acero (HB 150) y Fundición
Acero (HB 200) y Fundición
Acero (HB 250) y Fundición
Acero (HB 150) y Bronce Fosforoso
La carga admisible al desgaste es una
fuerza normal, debido a que Buckingham
la comparó con la carga dinámica, es
necesario efectuar algunas manipulaciones
a la ecuación, si:
K = ( Sc2 sen Ø / 1.4) ( 1 / Ep + 1 / Eg )
Q = 2 Dg / ( Dp + Dg ) = 2 Zg / ( Zg E Zp )
( - es para engranajes interiores )
Resulta:
Fw = Dp b Q K Pd
Los valores de Sc y K se encuentran en la
Tabla 8. La expresión revela que es
Acero (HB 250) y Bronce Fosforoso
proporcional al producto ( D . b ),
Fundición y Fundición
superficie de la sección del cilindro
Fundición y Bronce Fosforoso
primitivo del engranaje con un plano que
Tabla 8 – Factor de carga al desgaste K y límite de fatiga superficial Sc
pasa por su eje, lo cual implica el hecho
corroborado por la experiencia, de que no se modifica la resistencia al desgaste aumentando el
módulo, cuando se mantiene el diámetro primitivo y el ancho del engranaje.
Cuando el trabajo a que se hallan sometidos los engranajes es continuo y las velocidades son altas,
la resistencia al desgaste juega un papel preponderante, por el contrario, cuando las transmisiones
son de baja velocidad y trabajan en breves lapsos entre grandes intervalos, el desgaste tiene mucha
menos importancia.
Acero (HB 200) y Bronce Fosforoso
6.5.4. Rotura de diente:
La rotura de diente se produce en forma inmediata y en casi todos los casos produce daños graves
en la transmisión dejando inmediatamente fuera de servicio el equipo.
La rotura total de un diente o de una parte considerable del mismo, es el resultado de una falla que
se originó, ya sea por sobrecarga, golpes, o por el fenómeno más común de la fatiga.
Engranajess: Diseño y Cálculo
38
Las fallas por fatiga son ocasionadas por sobrecarga que proviene de omisiones en el diseño,
rebabas de la fresa en los filetes de la raíz, adherencias, agrietamientos provocados por el
tratamiento térmico y desalineamientos.
Las rupturas originadas por sobrecarga se producen por un desalineamiento repentino, desperfectos
en los cojinetes que tienden a paralizar la transmisión del engranaje o partículas grandes de
materiales extraños que pasan entre los engranajes en movimiento.
Con frecuencia es la ruptura de los dientes sólo un efecto secundario del exceso, ya sea de desgaste,
o de formación de picaduras.
6.6. Ecuaciones de la American Gear Manufacturers Association (AGMA):
Las ecuaciones finales presentadas son las de la Asociación Americana de
Fabricantes de Engranajes. La AGMA ha sido por muchos años la autoridad
responsable de la divulgación de información referente al diseño y análisis de
los engranes. Los métodos que presenta esta organización son de uso común
en Estados Unidos cuando la resistencia y el desgaste son las consideraciones
primordiales. En vista de este hecho es importante que el enfoque de AGMA
a este tema se exponga aquí sin ningún cambio.
El enfoque general de AGMA requiere un gran número de diagramas y gráficas, aquí se han
omitido muchos de ellos eligiendo algunos ángulos de presión y utilizando sólo dientes de tamaño o
altura completa.
El estándar o norma que se utiliza es: AGMA Standard for Rating Pitting Resistance and Bending
Strength of Spur and Helical Involute Gear Teeth, AGMA 2001-D04. La que sigue es una cita
tomada del prólogo de la norma mencionada:
“Este estándar de AGMA y publicaciones relativas están basados en datos, condiciones o aplicaciones típicos o
promedio. Los estándares están sujetos a mejoramiento, revisión o anulación continuos, según lo dicte la experiencia
acrecentada. Cualquier persona que consulte publicaciones técnicas de AGMA deberá cerciorarse de que obtenga la
información más reciente disponible de la asociación acerca del tema en cuestión.
Se pueden citar o extractar en su totalidad tablas u otras secciones completas o independientes. La línea de
acreditación debe indicar (por ejemplo): ‘Extractado de .....(nombre y número de norma), con autorización del editor,
American Gear Manufacturers Association’. “
Esta norma no produce respuestas únicas porque contiene factores que no están definidos en forma
objetiva, el Ingeniero debe asignar los valores con base en su experiencia anterior. En efecto, en la
página 1 se dice:
“El conocimiento y el juicio que se requieren para evaluar los diversos factores nominales vienen de años de
experiencia que se ha ido acumulando en el diseño, fabricación y operación de unidades de engranaje. Los factores
empíricos dados en este estándar son de naturaleza general. Las normas de aplicación de AGMA pueden utilizar otros
factores empíricos que se adecuen más estrechamente al uso particular. Esta norma está orientada al diseñador
experimentado de engranes, capaz de seleccionar valores razonables para estos factores. No está dirigido hacia el uso
masivo de la ingeniería pública en general.”
A Pesar de lo enunciado, debido a que casi todos los factores son obtenidos de modo empírico,
puede conservarse la ecuación y cambiar los valores de los mismos en caso de tener más
información acerca del comportamiento del engrane (fabricación de un prototipo o modelo,
realización de experiencias o ensayos sobre diseños similares existentes, etc.). Los factores indican
cuáles, y en qué medida, son las variables que afectan la capacidad de transmitir carga de un
determinado mecanismo.
Engranajess: Diseño y Cálculo
39
En el enfoque de AGMA se utilizan dos fórmulas fundamentales, una para el esfuerzo por flexión y
una para la resistencia a la picadura. Los resultados que se obtienen con ellas reciben el nombre de
números de esfuerzo.
6.6.1. Ecuación para el esfuerzo por flexión:
Esta ecuación es particularmente útil al diseñador porque se aplican los factores de corrección a la
ecuación original de Lewis con lo que se compensan algunas de las suposiciones erróneas
establecidas en la obtención de la misma, así como también algunos factores importantes que no se
consideraron originalmente. La resistencia de los dientes de los engranajes rectos, helicoidales,
doble helicoidales y cónicos, puede determinarse por medio de una ecuación básica de esfuerzo
flexionante:
Wt K a Pd K s K m K B K I
KV F
J
(US units)
W K 1.0 K s K m K B K I
= t a
KV Fm
J
(SI units)
ad = at . KL / ( KT KR )
: esfuerzo calculado en la raíz del diente [lb/plg2] ó [MPa]
ad: esfuerzo de diseño máximo admisible [lb/plg2] ó [MPa]
at : esfuerzo admisible según el material [lb/plg2] ó [MPa]
Wt: carga tangencial transmitida
Ko: factor de sobrecarga
Kv: factor de velocidad
Pd : paso diametral
F : ancho del engrane
Ks : factor de tamaño
Km: factor de distribución de carga
J : factor de geometría
KL: factor de duración
KT: factor de temperatura
KR: factor de confiabilidad
[lb]
ó [N]
[1/plg] ó m: módulo [mm]
[plg] ó [mm]
Obsérvese que en el esfuerzo calculado hay tres grupos de términos, el primero está relacionado con
la carga, el segundo con el tamaño de los dientes y el tercero con la distribución de esfuerzos. Estos
términos se explicarán y evaluarán a continuación.
Carga tangencial transmitida (Wt):
Es calculada directamente de la potencia
transmitida a través del juego de
engranajes.
Factor de sobrecarga (Ko):
El factor de sobrecarga o de aplicación considera el hecho de que, mientras que Wt es el valor
promedio de la carga transmitida, la carga máxima real puede ser hasta dos veces mayor debido a
choques que se tengan ya sea en el sistema motor o en el impulsado. La sección 9.1 de los
estándares trata de este factor y en parte se lee:
“El factor de aplicación toma en cuenta cualesquiera cargas aplicadas externamente en exceso de la carga tangencial
nominal, Wt. Los factores de aplicación solamente se pueden establecer después de una experiencia de campo
considerable obtenida en una aplicación en particular.”
Engranajess: Diseño y Cálculo
40
Aplíquense los valores de la Tabla 9 para las condiciones detalladas en la Tabla 10.
Sistema
Sistema impulsado
Sistema motriz
Uniforme
Choques
moderados
Choques
intensos
Uniforme
1,00
1,25
≥1,75
Choques ligeros
1,25
1,50
≥2,00
Choques medianos
1,50
1,75
≥2,25
Para transmisiones de incremento de velocidad de
rectos y cónicos auméntese 0,01 (ZG/ZP)2. Para
helicoidales se requieren otras consideraciones. Si se
aplica un factor se sobrecarga específico úsese 1
para KR(CR) y KL(CL).
Tabla 9 – Factor de sobrecarga Ko
Característica
Uniforme
Motores eléctricos, turbinas
Choques ligeros
Motores de combustión interna,
multicilíndricos
Choques medianos
Motores de combustión interna,
monocilíndricos
Motriz
Uniforme
Impulsado
Ejemplos
Ventiladores centrífugos, agitadores de
líquidos, transportadores de banda
(alimentación uniforme)
Ventiladores del tipo de lóbulo, agitadores
Choques moderados de líquidos y sólidos, transportadores de
banda (alimentación variable)
Trituradoras de mineral, compresores
Choques intensos monocilíndricos, transportadores
recíprocos
Tabla 10 – Tipos de sistemas motores e impulsados
Factor de Velocidad (Kv):
Como se vio antes, se utilizan factores dinámicos para tomar en cuenta imprecisiones en la
fabricación y engrane de los dientes. El error de transmisión se define como la desviación respecto
de la velocidad angular uniforme en el par de engranajes. Depende de:
-
Imprecisiones producidas en la generación del perfil del diente; entre éstas se cuentan errores en
el espaciamiento entre dientes, el avance del perfil y acabado.
Vibración de los dientes durante la conexión debida a rigidez o inflexibilidad de los dientes.
Magnitud de la velocidad en la línea de paso.
Desequilibrio dinámico de los elementos giratorios o rotatorios.
Desgaste y deformación permanente de partes de contacto de los dientes.
Desalineamiento del eje o árbol del engrane, y deflexión lineal y angular en el mismo.
Fricción entre los dientes.
En un intento por controlar hasta cierto punto estos efectos, la AGMA ha definido un conjunto de
índices (o números) de control de calidad (AGMA 390.01), que definen las tolerancias para
engranes de diversos tamaños fabricados para una clase de calidad específica. Las clases 3 a 7
incluirían a la mayoría de los engranes de calidad comercial. Las clases 8 a 12 son las de calidad de
precisión. El índice de nivel de exactitud en la transmisión Qv de la AGMA, se puede considerar
también como índice de calidad. Las ecuaciones que siguen del factor dinámico están basadas en
estos números Qv:
Kv = [ A / ( A + vp½ ) ]B
Dónde:
A = 50 + 56 ( 1 – B )
B = (12 – Qv)2/3 / 4
Vp [pie/min]
Los valores que se obtienen por la ecuación se grafican en la Figura 52 para tener un intervalo de
valores útiles de Qv. El extremo de cada curva corresponde a la máxima velocidad permitida en la
línea de paso para el nivel de exactitud dado.
Engranajess: Diseño y Cálculo
41
Figura 52 – Factor de Velocidad Kv
A modo de guía:
-
-
-
-
Kv = 1 para engranajes rectos de alta precisión, con dientes acepillados o acabados a esmeril;
para engranajes helicoidales y doble helicoidales de alta precisión; para engranajes cónicos
tallados que tienen la plantilla de contacto entre los dientes más conveniente, exactitud en el
espaciamiento entre los dientes y en la concentricidad. Siempre que el sistema de transmisión no
desarrolle cargas dinámicas apreciables.
Qv = 9 para engranajes rectos tallados o rectificados a esmeril; helicoidales de alta precisión;
para el planeamiento de engranajes cónicos espirales grandes. Cuando la carga dinámica es
ligera.
Qv = 6 para engranajes rectos, helicoidales o doble helicoidales de alta precisión acepillados o
rectificados a esmeril, cuando es posible que se desarrolle una carga dinámica (este valor es
recomendado para engranajes helicoidales y doble helicoidales del tipo comercial para
aplicaciones industriales en general).
Qv = 5 para engranajes rectos acabados por corte o fresa o acepillado, cuando se espera tener
carga dinámica moderada; para el planeamiento de engranajes cónicos rectos comerciales.
Cuando se tallen dientes inexactos deberán usarse factores dinámicos más bajos que los
anteriormente indicados.
Factor de tamaño (Ks):
El objetivo original del factor de tamaño es considerar cualquier falta de
Paso Diametral
Ks
uniformidad de las propiedades del material. Depende principalmente de:
1
1,00
paso de los dientes, diámetro de las ruedas, relación del tamaño entre los
2
0,84
dientes y el diámetro de la rueda, ancho de la cara, esfuerzos máximos y
3
0,76
gradiente de esfuerzos, relación entre la profundidad del temple superficial
4
0,71
y el espesor de los dientes, templabilidad y tratamiento térmico de los
6
0,64
materiales. La recomendación de la AGMA es que se utilice un factor igual
8
0,59
a la unidad “para la mayoría de los engranajes siempre que se haga una
10
0,56
elección adecuada del acero para el tamaño de la pieza y el tratamiento
0,50
16
térmico y el proceso de templado o endurecimiento.”
Tabla 11 – Factor de tamaño Ks
para engranajes cónicos
Engranajess: Diseño y Cálculo
42
Se le puede dar un valor equivalente a la unidad para la mayoría de los engranajes rectos y
helicoidales. Cuando se emplean dientes de paso grande con endurecimiento superficial por
carburación, puede ser conveniente reducir la carga nominal para compensar el pequeño efecto
tensor de las fuerzas de compresión superficial desarrolladas por la corteza endurecida, por ejemplo,
si para un engranaje de paso diametral 10 se aplica un factor equivalente a la unidad, uno de 1.25
puede ser el adecuado para otro engrane de paso diametral 1, con dientes superficialmente
endurecidos.
Para los engranajes cónicos se dispone de factores estandarizados (Tabla 11).
Factor de distribución de carga (Km):
El factor de distribución de carga se emplea para tomar en cuenta: desalineamiento de los ejes
geométricos de rotación por algún motivo, errores de alineamiento originados por inexactitudes de
los dientes, deflexiones elásticas causadas por la carga en ejes o árboles, cojinetes o en el
alojamiento. Los errores indicados pueden combinarse de tal manera que el contacto con el
engranaje oponente sea menor que el ancho íntegro de la cara, o que el contacto sea completo, pero
carente de uniformidad.
En el estándar se presentan dos métodos, uno empírico y el otro analítico. Ambos métodos son muy
extensos y están fundamentados en muchas definiciones nuevas. La AGMA reconoce que el método
empírico produce resultados similares a los que se obtienen en estándares anteriores. Por ese motivo
se utiliza un enfoque más simple para determinar su valor, que se obtuvo de un estándar anterior.
Hay que tener presente que los errores del alineamiento de operación no siempre pueden evaluarse
con facilidad, por lo que se presentan las Tabla 12 (rectos y helicoidales) y 13 (cónicos) con valores
representativos que corresponden a engranes del tipo comercial.
Condición de soporte
Ancho de cara F [mm]
Tipo de montaje
Aplicación
50
150
225
400
Montaje exacto, bajas holguras de
1,3
cojinetes, deflexiones mínimas,
(1,2)
engranes de precisión
1,4
(1,3)
1,5
(1,4)
1,8
(1,7)
Ambos engranes en
montaje interior
1-1,00
1-1,00
1-1,25
Montajes menos rígidos, engranes
1,6
menos precisos, contacto a todo lo
(1,5)
ancho de la cara
1,7
(1,6)
1,8
(1,7)
2,0
(2,0)
Un
engrane
en
montaje exterior
1,10-1,25
1,10-1,25
1,10-1,40
Exactitud y montaje de modo que
exista contacto incompleto con la
cara
> 2,0 (> 2,0)
Ambos engranes en
montaje exterior
1,25-1,40
-
1,25-1,50
Ind. General Automóviles
Aviones
Los valores en ( ) son para engranajes helicoidales
Tabla 12 – Factor de montaje Km (engranajes rectos y helicoidales)
Tabla 13 – Factor de montaje Km (engranajes cónicos)
Factor de geometría (J):
El factor de geometría evalúa la forma (o perfil) del diente, la posición en la cual se le aplica la
carga más peligrosa, concentración de tensiones y corrección debido a la forma geométrica y a la
repartición de la carga entre uno o más pares de dientes:
J = Y / ( Kf m N )
Siendo:
Y : factor de forma
Kf : factor de concentración de tensiones
mN: relación de repartición de carga en los dientes
El factor de forma Y no es el factor de forma de Lewis, aquí se obtiene trazando un croquis del
perfil del diente en el plano normal y está basado en el punto más alto de contacto con un solo
Engranajess: Diseño y Cálculo
43
diente. La forma del diente depende de la geometría del sistema de diente, es decir, de factores tales
como el ángulo de presión, número de dientes, y si son de profundidad completa o de sistema corto.
El factor de concentración de tensiones Kf está basado en las fórmulas ya analizadas de DolanBroghamer (ver 6.4) derivadas de una investigación foto elástica que se realizó hace más de 40
años.
La relación de repartición de carga mN es igual al ancho de cara dividido entre la longitud total
mínima de las líneas de contacto. En el caso de engranajes rectos mN = 1, para engranajes
helicoidales que tienen una relación de contacto con la cara (ancho dividido paso axial) mayor a 2,
una aproximación conservadora está dada por:
mN = pbN / (0.95 Z)
Donde pbN es el paso base normal y Z es la longitud de la línea de acción en el plano transversal
(segmento de engrane).
En la Figura 53 se obtiene el factor geométrico J para engranajes rectos de Ø = 20°, la Figura 54
para engranajes rectos de Ø = 25°, la Figura 55 (en conjunto con la Figura 56) para engranajes
helicoidales de ØN = 20°, la Figura 57 para engranajes cónicos rectos de Ø = 20° y ángulo entre
flechas de 90°.
Figura 53 – Factor de Geometría J (Engranajes Rectos 20°)
Las figuras presentadas suponen que el factor teórico de concentración de tensiones no se afecta
grandemente por factores tales como acabado de la superficie, plasticidad, esfuerzos residuales u
otros factores. Como puede observarse en las Figuras 53 y 54, el conjunto de curvas de la parte
superior se usan cuando la carga es aplicada en el punto más alto en un simple contacto del diente,
mientras que la curva inferior se usa cuando la carga actúa en la parte superior del diente. La Tabla
14 proporciona las variaciones permitidas en el paso base entre engrane y piñón y pueden usarse
independientemente que la carga sea o no compartida. Las curvas superiores de las Figuras 53 y 54
pueden usarse con el error obtenido a partir de dicha tabla si su valor es menor a los indicados en las
columnas situadas a la izquierda del centro de la tabla. Se usará la curva inferior si los errores son
mayores a los indicados en las columnas situadas a la derecha del centro de la tabla.
Engranajess: Diseño y Cálculo
44
Figura 54 - Factor de Geometría J (Engranajes Rectos 25°)
Figura 55(arriba) – Factor de Geometría J (Engranajes helicoidales) – Figura 56 (abajo) – Modificador J
Engranajess: Diseño y Cálculo
45
Zp
15
20
25
Error permisible:
Carga repartida
Carga [lb/plg cara]
500
1000 2000
Error permisible:
Carga no repartida
Carga [lb/plg cara]
500
1000 2000
0,0004 0,0007 0,0014 0,0006 0,0011 0,0023
0,0003 0,0006 0,0011 0,0006 0,0011 0,0023
0,0002 0,0005 0,0009 0,0006 0,0011 0,0023
Tabla 14 – Límite del error de funcionamiento en los engranajes
rectos de acero (variación en el paso base)
Tratamiento
térmico
Recocido o
normalizado
Figura 57 – Factor de Geometría J (Engranajes cónicos 20°)
Altura completa, piñón de adendo largo, engrane de adendo corto
Templado y
revenido
HB
Say
[lb/plg2]
150
30.000
200
50.000
250
75.000
200
60.000
250
85.000
300
110.000
350
135.000
400
160.000
Tabla 15 – Tensiones de fluencia admisibles
Esfuerzo admisible según el material (Sat):
El esfuerzo admisible para los materiales de los engranajes varía con factores tales como calidad,
tratamiento térmico, material forjado o vaciado y con la composición del material. Es un esfuerzo
de diseño con 10 millones de ciclos de operación con carga (Tabla 16) y se le determina por
experiencias prácticas de trabajo para cada material y para cada condición del citado material. Son
valores nominales y se entienden para aplicaciones generales. Si la aleación del acero o el
tratamiento térmico que recibe, no son los adecuados para un caso concreto, se tendrán que aplicar
valores proporcionalmente más bajos. En algunos casos se puede permitir la aplicación de valores
más altos, siempre que se sigan cuidadosos procedimientos de diseño y de fabricación de los
engranajes, elección de los aceros tratamiento superficial con chorro de perdigones y la aplicación
de los mejores procedimientos de tratamiento térmico.
Aplíquese el 70% de estos valores para engranes intermedios, o en donde los dientes reciban cargas
en ambas direcciones.
Cuando un engranaje esté sujeto a sobrecargas intensas, momentáneas y poco frecuentes, el
esfuerzo admisible se determina más bien por sus propiedades de resistencia al límite de fluencia
que por la resistencia a la fatiga del material. En la Tabla 15 se encuentra una lista de valores que se
sugieren para dicha resistencia.
Factor de duración (KL):
Como se mencionó en el punto anterior, las resistencias están basadas en 107 ciclos de carga en los
dientes. El objetivo del factor de duración (Tabla 17) consiste en modificar dichas resistencias para
obtener duraciones distintas.
Los esfuerzos que se desarrollan en los engranajes no son directamente proporcionales a las cargas
y la concentración de tensiones varía con el número de ciclos, por lo que resulta evidente que es
difícil determinar un factor de vida exacto. Cuando se requiere una vida útil larga debe tenerse en
cuenta el desgaste normal de los engranajes y de sus apoyos, así como los efectos que esto pueda
tener sobre las condiciones de contacto.
Cuando el criterio sea el de la resistencia a la fluencia el factor de duración vale 1.
Factor de temperatura (KT):
Se utiliza para ajustar el valor del esfuerzo admisible tomando en consideración la temperatura. En
los engranajes en los que el aceite o los cuerpos de los engranes trabajan con temperaturas que no
exceden de 250°F (120°C), al factor de temperatura se le puede asignar el valor de 1.
Engranajess: Diseño y Cálculo
Material
Clase
AGMA
46
Designación
comercial
De A-1 a
A-5
Tratamiento térmico
Templado completo y
revenido
Dureza mín. en
superficie
Dureza
núcleo
25-33.000
(14.000)
85-95.000
(85.000)
240 HB
31-41.000
105-115.000
300 HB
36-47.000
(19.000)
120-135.000
(120.000)
360 HB
40-52.000
145-160.000
400 HB
42-56.000
155-170.000
(25.000)
(145.000)
50 HB
45-55.000
54 HB
Endurecido por flameo o
inducción (patrón B)
Acero
AISI 4340
Nitrurizado
55-65.000
(27.500)
180-200.000
(180.000)
60 HRC
55-70.000
(30.000)
200-225.000
(200.000)
48 HRC
34-45.000
155-180.000
36-47.000
150-175.000
38-48.000
170-195.000
60 HRC
20
Fundición
30
Según es fundido
40
A-7-a
60-14-18
A-7-c
80-55-06
Fundición
Maleable
155-172.000
350 HB
55-65.000
192-216.000
-
5.000
(2.700)
50-60.000
(50.000)
175 HB
8.500
(4.600)
65-75.000
(65.000)
200 HB
13.000
(7.000)
75-85.000
(75.000)
140 HB
Recocido, templado y
revenido
Fundición
Nodular
300 HB
60 HRC
54 HRC
2 1/2%Cromo
175-195.000
55 HRC
46 HRC
Nitrallos 135M
170-190.000
22.000
Carburizado y endurecido en
la superf.
AISI 4140
Sac [lb/plg2]
180 HB
(450 HB)
Endurecido por flameo o
inducción (patrón A)
Sat [lb/plg2]
180 HB
90-100% de 90-100% de Sac
Sat para acero para acero de la
de la misma misma dureza
dureza (ídem)
(ídem)
A-7-d
100-70-03
230 HB
A-7-e
120-90-02
270 HB
A-8-c
45007
165 HB
10.000
72.000
A-8-e
50005
180 HB
13.000
78.000
A-8-f
53007
195 HB
16.000
83.000
A-8-i
80002
240 HB
21.000
94.000
Bronce 2
(10-12%
estaño)
AGMA 2C
Fund. en molde de arena
Resist. mín. a la
tensión 40.000
lb/plg2
5.700
(3.000)
30.000
(30.000)
Al/Br 3
ASTM B-148-52
Aleación 9C
Tratado térmicamente
Resist. mín. a la
tensión 90.000
lb/plg2
23.600
(12.000)
65.000
(65.000)
Bronce
Los valores entre ( ) corresponden a Engranajes Cónicos.
Tabla 16 – Tensiones admisibles a la fatiga y a la fatiga superficial (Multiplicar por 0,070307 para obtener en Kg/cm 2)
En algunos casos es necesario aplicar un valor superior a la unidad para engranes con
endurecimiento superficial por carburación y temperaturas de operación mayores que 160°F (71°C).
Una fórmula básica generalmente aceptada para la corrección de engranajes cónicos y que algunas
veces se aplica también para engranajes rectos y helicoidales es la siguiente:
KT = 460 + TF / 620
donde TF es la temperatura máxima de trabajo del aceite en °F.
Engranajess: Diseño y Cálculo
47
KL
N° de ciclos
CL
160 HB
250 HB
Confiabilidad
450 HB
Carb. sup.
Cónicos
Carb. Sup.
1.000
-
1,6
2,4
3,4
2,7
4,6
10.000
1,5
1,4
1,9
2,4
2,0
3,1
100.000
1,3
1,2
1,4
1,7
1,5
2,1
1.000.000
1,1
1,1
1,1
1,2
1,1
1,4
10.000.000
1,0
1,0
1,0
1,0
1,0
1,0
≥100.000.000
1,0
1,0-0,8
1,0-0,8
1,0-0,8
1,0-0,8
1,0
Superficie carburizada se refiere de 55 a 63 HRC
Tabla 17 – Factor de duración KL y CL para engranajes de acero
CR, KR
0,9
0,85
0,99
1,00
0,999
1,25
0,9999
1,50
Tabla 18 – Factor de Confiabilidad KR (fatiga)
Confiabilidad
CR, KR
Alta
≥3,00
Diseño normal
1,33
Tabla 19 – Factor de Confiabilidad KR (fluencia)
Factor de confiabilidad (KR):
El factor de seguridad o de confiabilidad forma parte de la
ecuación a fin de asegurar alta confiabilidad, o en algunos casos
para permitir diseñar con ciertos riesgos calculados.
Las resistencias de la AGMA presentadas se basan todas en una
confiabilidad R=0.99 correspondiente a 107 ciclos de duración
(Figura 58). Para obtener otras confiabilidades utilícese la Tabla
18.
Figura 58
Debe señalarse que aunque algunos de estos factores son menores a uno, normalmente éstos se
utilizan para resistencia por fatiga del material, por lo tanto, una falla simplemente indicará que el
engrane tendrá una vida menor que la mínima para la cual fue diseñado.
En la Tabla 19 se muestran los factores de confiabilidad que se utilizan para engranes no
carburizados que se aplican sólo al esfuerzo de fluencia del material, y a la carga máxima a la cual
los engranes están sujetos.
Actualmente se tiene toda la información necesaria para calcular el esfuerzo real flexionante y
comparar este esfuerzo con el máximo admisible.
6.6.2. Ecuación de desgaste:
123-
Ley de distribución de presiones según Hertz
Distribución de la presión hidrodinámica (cuerpos
indeformables)
Distribución real de presiones (cuerpos deformados,
en movimiento y actuando una capa de lubricante)
Figura 59 – Distribución de tensiones
La ecuación presentada por AGMA tiene su base, al igual
que Buckingham, en la ecuación de Hertz para dos
cilindros en contacto. Se vio que el radio de curvatura de
dichos cilindros coincide con el radio de curvatura
instantánea de los perfiles en el punto de contacto. Sin
embargo la presión calculada no coincide con la presión
real en los flancos de las ruedas dentadas, ya que al existir
entre éstas una rodadura, un movimiento adicional de
deslizamiento y una capa de lubricante, se presentan
cambios fundamentales no sólo en la magnitud de la
presión, sino también en la ley de distribución de la
misma (Figura 59). Por ello la misma es afectada por
coeficientes empíricos, algunos de los cuales son de igual
valor, o dependen de los mismos parámetros, que los
analizados en la ecuación de flexión. La ecuación, que es
válida para engranajes rectos, helicoidales, doble
helicoidales y cónicos, es:
sc = Cp [ ( Wt Co / Cv ) . ( 1 / F Dp ) . ( Cs Cm Cf / I ) ] ½
sad = sac . CL CH / ( CT CR )
Engranajess: Diseño y Cálculo
48
Dónde:
sc : esfuerzo de contacto
[lb/plg2]
sad: esfuerzo de diseño máximo admisible [lb/plg2]
sac: esfuerzo admisible por contacto
[lb/plg2]
Wt: carga tangencial transmitida
[lb]
Cp: coeficiente elástico
[lb/plg2]0.5
Co: factor de sobrecarga
Cv: factor de velocidad
Dp: diámetro primitivo
[plg]
F: ancho del engrane
[plg]
Cs : factor de tamaño
Cm: factor de distribución de carga
Cf : factor de estado o condición de la superficie
I : factor de geometría
CL: factor de duración
CH: factor de relación de dureza
CT: factor de temperatura
CR: factor de confiabilidad
Carga tangencial transmitida (Wt) y Factores (Co, Cv, Cs, Cm, CR, CT):
Co = Ko, Cv = Kv, Cs = Ks, Cm = Km, CR = KR, CT = KT; ver 6.6.1.
Coeficiente elástico (CP):
Material del Engrane
Material
del Piñón
Acero
Fundición
Maleable
Fundición
Nodular
Fundición
Bronce de
Aluminio
Bronce de
Estaño
Acero
2300
(2800)
2180
2160
2100
(2450)
1950
(2400)
1900
(2350)
Fundición
Maleable
2180
2090
2070
2020
1900
1850
Fundición
Nodular
2160
2070
2050
2000
1880
1830
Fundición
2100
(2450)
2020
2000
1960
(2250)
1850
(2200)
1800
(2150)
Bronce de
Aluminio
1950
(2400)
1900
1880
1850
(2200)
1750
(2150)
1700
(2100)
Bronce de
Estaño
1900
(2350)
1850
1830
1800
(2150)
1700
(2100)
1650
(2050)
Es un coeficiente que depende de
las propiedades elásticas de los
materiales de los engranes, de la
teoría de las superficies de
contacto cilíndricas (ver 6.5.3) se
observa que el denominador
contiene
cuatro
constantes
elásticas, dos para el piñón y dos
para su rueda, como un medio
sencillo de combinar y tabular los
resultados
de
diversas
combinaciones de materiales de
piñón y engrane, la AGMA define
un coeficiente elástico por la
ecuación:
Relación de Poisson = 0,30 - Los valores entre ( ) son para engranajes cónicos
Tabla 20 – Coeficiente elástico Cp [lb/pulg2]0.5
CP2 = k / π. { [( 1-12) / E1] + [(1-22) / E2] }
Dónde:
: relación de Poisson
E : módulo de elasticidad
k : constante (1 para engranajes rectos y helicoidales, 3/2 para engranajes cónicos: se obtiene a
partir de un análisis de esfuerzo de Hertz de esferas en contacto)
En la Tabla 20 se encuentran tabulados los valores de Cp para distintas combinaciones de
materiales.
Engranajess: Diseño y Cálculo
49
Factor de estado o condición de la superficie (Cf):
El factor depende del acabado superficial (según sea afectado por el cortado, acepillado,
pulimentado, rectificado, etc.), de los esfuerzos residuales y de los efectos plásticos (endurecimiento
por el trabajo). Puede tomarse como la unidad, a menos que las pruebas o experiencias en el sitio de
trabajo indiquen otra cosa.
Factor de geometría (I):
El factor toma en cuenta el efecto de las
proporciones dimensionales, tales como la
curvatura del perfil durante el contacto, el
ángulo de presión y la repartición de la
carga. Surge de la suma de los radios
recíprocos de la ecuación de Hertz
analizada en 6.5.3:
I = Cc / m N
Dónde:
mN: factor de repartición de carga, ver 6.6.1.
Cc :factor de curvatura en la línea primitiva
Cc = (cos Øt sen Øt / 2 ) [ mG / ( mG ±1 ) ]
(- para engranajes interiores)
(a) 20° altura completa; (b) 20° altura completa;(c)20° dientes cortos
Figura 60 – Factor de Geometría I (Engranajes Rectos)
Se reemplazó Ø por Øt (ángulo de presión
transversal) de manera que la relación se
aplicará
también
en
engranajes
helicoidales, y mG = ZG / Zp = DG / Dp es la
relación de velocidad.
El factor geométrico para engranajes rectos
se obtiene de la Figura 60, para engranajes
cónicos de la Figura 61, para engranajes
helicoidales hay que calcularlo ya que el
ángulo de la hélice no está normalizado.
Esfuerzo admisible por contacto (Sac):
Este esfuerzo depende de la composición
del material, de las propiedades mecánicas,
del número de ciclos, de la temperatura, del
tamaño, de los esfuerzos residuales y del
endurecimiento por el trabajo. En la Tabla
16 (ver 6.6.1) se dan a conocer valores
característicos.
Figura 61 – Factor de Geometría I
(Engranajes Cónicos 20°, ángulo entre ejes 90°)
Factor de duración (CL):
Al igual que KL, el objetivo de este factor
consiste en modificar la resistencia AGMA
para obtener duraciones distintas de 107.
Se obtiene de la Tabla 17 ya mencionada
en 6.6.1.
Engranajess: Diseño y Cálculo
50
Factor de relación de dureza (CH):
El piñón tiene un menor número de dientes que su rueda y, en
HB Engrane HB piñón
consecuencia, está sujeto a un mayor número de ciclos de esfuerzo de
180
210
210
245
contacto. Si el piñón y la rueda de un engranaje han de ser endurecidos
225
265
por completo, puede obtenerse una resistencia de superficie uniforme
245
285
haciendo que el piñón sea más duro que el engrane. Se puede lograr un
255
300
efecto similar cuando un piñón con endurecimiento superficial se
270
315
conecta con un engrane endurecido en su totalidad. En la Tabla 21 se
285
335
muestran algunas combinaciones típicas de dureza para engrane y piñón
300
350
Tabla 21-Combinaciones de durezas que pueden usarse en algunas aplicaciones.
El factor de relación de dureza se
utiliza sólo para el engrane, su
objetivo es el de ajustar las
resistencias de las superficies
para ese efecto. Aunque es obvio
que sea función de la dureza de
los dos engranes, también
depende de la relación de
velocidades. Los valores se
obtienen por la ecuación:
CH = 1 + A (mG – 1)
Dónde: A = 0.00898 ( HBp /
HBG) – 0.00829
La misma está graficada en la
Figura 62 y es válida cuando la
relación de durezas es menor o
igual a 1,70.
Para una dureza superficial del
piñón igual o mayor a 49 HRC y
para una dureza del engrane
entre 180 y 400 HB:
CH = 1 + B (450 + HBG)
Figura 62 – Factor de relación de durezas CH
Dónde: B = 0.00075 e-0.0112f
siendo f [plg] el acabado de la
superficie del piñón
Actualmente se tiene toda la información necesaria para calcular el esfuerzo de contacto real y
comparar este esfuerzo con el máximo admisible.
6.7. Consideraciones generales sobre el diseño de engranajes:
Como se ha visto, en una transmisión de engranajes intervienen muchas variables y aún no se ha
desarrollado ningún procedimiento sencillo de aplicación general que de las soluciones correctas,
pero esto ocurre en todas las cuestiones de ingeniería y más en lo que respecta a los engranajes que
a muchos otros elementos de máquinas. Obviamente, la experiencia es un factor muy importante al
momento de tomar decisiones sobre los valores a adoptar para las distintas variables, a falta de la
misma hay que aplicar las recomendaciones de los distintos autores y especialistas en el tema, la
idea es que dichas recomendaciones sumadas a la experiencia que se vaya acumulando formen un
criterio para tomar decisiones, y, de esta forma, que no sean valores tomados al azar. Es sobre la
Engranajess: Diseño y Cálculo
51
base de esto que se presentan a continuación algunas consideraciones a tener en cuenta a la hora del
diseño.
El primer problema al diseñar un juego de engranes es el seleccionar la clase adecuada. El
diseñador de una transmisión debe considerar todos los tipos posibles de engranes y después
escoger el tipo que mejor cubra las necesidades del diseño.
Hasta este punto, el procedimiento de diseño puede ser de método de tanteos debido a que el
tamaño, forma del diente y dimensiones del engrane deben conocerse antes de que la carga y los
esfuerzos reales puedan ser determinados. Entonces es claro que el tipo más sencillo de análisis
deberá ser usado para determinar valores preliminares (ver 6.1), y después usar un procedimiento
más preciso para finalizar el diseño (ver 6.6).
Una consideración importante en el diseño de sistemas que utilizan engranes para transmitir
potencia es la selección adecuada de los rodamientos que soportan la flecha en la que están
montados los engranajes, esto básicamente indica calcular las cargas resultantes en los mencionados
apoyos.
6.7.1. Tipos funcionales de engranes:
Un factor que influye para escoger el engrane adecuado es el arreglo geométrico del aparato que
necesita la transmisión. Los engranes pueden transmitir movimiento desde flechas orientadas
prácticamente en cualquier dirección (Tabla 1 y Figuras 2 a 5 al principio del capítulo).
Otros factores adicionales que afectan la elección son: equipo existente para la fabricación,
experiencia de ingeniería disponible para el diseño, y las limitaciones de espacio y peso. También
están comprendidos los requerimientos específicos tales como resistencia a las vibraciones y grado
de ruido. Una comparación general de los diferentes tipos de engranes se presenta en la Tabla 22.
Tipo de Engrane
Eficiencia
Ancho máximo
nominal b
Tipo de carga en
apoyos
Reducción
Vel. Tang. Máx[m/min]
Alta precisión
Comercial
Ejes paralelos
Recto externo
b=d
Impuesto por el
engrane acoplado
Recto interno
Helicoidal externo
Radial
97-99,5
b=d
Radial y axial
Impuesto por el
engrane acoplado
Helicoidal interno
1:1-5:1
6.000
1:5-7:1
6.000
1:1-10:1
12.000
1:5:1-10:1
6.000
1.200
Ejes que se intersectan
1/3 distancia al
vértice
Cónico recto
Cónico Zerol
97-99,5
28% de distancia al
vértice
Radial y axial
1:1-8:1
1/3 distancia al
vértice
Cónico en espiral
3.000
300
3.000
300
7.500
1.200
Ejes alabeados
Sinfín cilíndrico
50-90
Sinfín de doble
evolvente
50-98
Hipoide
90-98
Spiroide
50-97
bt = 5 tn cos λ
bg = 0,67 d
bt = 0,90 D
bg = 0,90 d
bg = 1/3 distancia al
vértice
bp = 0,24 D
bg = 0,14 D
3:1-100:1
1.500
3:1-100:1
1.200
Radial y axial
3.000
1:1-10:1
1.200
9:1-100:1
1.800
d: diámetro primitivo piñón;
D: diámetro primitivo engrane;
λ: ángulo avance;
tn: paso normal
Los engranes con relación 100:1 pueden ser construidos con relaciones de hasta 300:1, la relación 100:1 se
muestra como límite máximo normal.
Tabla 22 – Comparación general de tipos de engranes
Engranajess: Diseño y Cálculo
52
Todos estos engranes han sido producidos para cubrir una necesidad. La selección del tipo de
engrane que se va a emplear puede ser efectuada por el diseñador, después que él estime todos los
requerimientos mencionados.
6.7.2. Materiales para engranes:
La industria de engranajes usa una amplia variedad de aceros, hierros fundidos, bronces, aluminio,
laminados fenólicos, plásticos y otros materiales. En algunos casos, las prácticas industriales, el
equipo de taller disponible para hacer engranes o los requisitos de diseño específicos dejan al
diseñador poco margen de selección para el material a usar. En otros casos puede ser posible
considerar una amplia variedad de materiales, entonces el costo del material en bruto, capacidad
relativa de carga para un tamaño dado, adaptabilidad para procesos de producción en masa y la
resistencia a la corrosión, entran en juego para elegirlo. Como un ejemplo, en muchos juguetes y
artefactos se usan engranes estampados de bronce. Esta no es una materia prima barata, pero pueden
hacerse engranes de bajo costo por estampado y este material además, resiste la corrosión.
Material
%C HB
AISI 1020
0.2
AISI 1040
0.4
AISI 4140
0.4
AISI 4340
0.4
AISI 1060
0.6
AGMA 20
AGMA 40
3.5
AGMA 60
ASTM 803.5
60-3 (dúctil)
180
200
350
200
350
220
350
350
550
150
175
200
200
Elasticidad Densidad Fluencia Tensión
[lb/plg2]
[lb/plg3] [lb/plg2] [lb/plg2]
54.000
89.000
63.825
99.000
93.000 123.000
60.500
95.000
28.5 x 106
0.283
155.000 170.000
68.500 108.000
166.000 175.000
168.000 175.000
265.000 275.000
12 x 106
0.255
20.000
16 x 106
0.260
40.000
20 x 106
0.265
60.000
24 x 106
0.265
60.000
Los materiales férricos (aceros,
hierro fundido) representan el
máximo tonelaje en comparación con
otros materiales, para la fabricación,
ya sea de engranajes propiamente
dichos o de cajas para los mismos.
Sus propiedades varían bastante y
por lo general dependen de su
composición y del tratamiento
térmico. La Tabla 23 muestra en
forma de bosquejo el rango general
de las propiedades obtenibles.
80.000
Tabla 23 – Propiedades generales de aceros y fundiciones
La fundición tiene bajo costo, buena maquinabilidad, alta resistencia al desgaste, la principal
desventaja es su baja resistencia a la tensión, lo cual hace que el diente del engrane sea débil a la
flexión y sea necesario utilizar un diente de mayor altura. La fundición nodular tiene agregados de
Magnesio o Cerio y es un material que tiene una resistencia muy alta a la tensión y buenas
características de desgaste y maquinabilidad. Generalmente los engranajes de fundición se utilizan
en máquinas grandes y de baja velocidad (inferior a 180 m/min).
Los engranes de acero tienen la ventaja, sobre el hierro, de ser de resistencia alta sin un costo
excesivo. Sin embargo, generalmente, requieren de tratamiento térmico para producir un
endurecimiento de superficie suficiente para obtener resistencia satisfactoria al desgaste. Debido a
que los aceros aleados están sujetos a menor distorsión debido al tratamiento térmico que los aceros
al carbono, con frecuencia se les da preferencia.
La dureza de un acero es generalmente una función del tratamiento térmico y no de su composición,
si bien es cierto que la dureza máxima obtenible para un acero dado está determinada por su
composición. La resistencia a la tensión es una función muy directa de la dureza Brinell. En la
Tabla 24 se muestran algunos grados de dureza y el significado que tienen en la industria
manufacturera de engranes.
El procedimiento básico que se sigue para el endurecimiento de los aceros consiste en calentarlos al
rojo, hasta cierto grado, para someterlos a un enfriamiento rápido o temple, por inmersión en agua o
aceite, recalentándolos a continuación para darles el grado de dureza final, o sea el revenido. Los
Engranajess: Diseño y Cálculo
53
engranes generalmente se fabrican dentro del rango de 200 a 350 HB, teniendo 0.40 a 0.60% de
Carbono. Un bajo contenido de Carbono, como 0.10 a 0.20%, es útil, sin embargo, para el corazón
del material de un engrane que es carburizado superficialmente después de cortar los dientes.
Dureza
HB
RC
150200
200
250
24
250
24
300
32
Maquinabilidad
Muy fácil
Comentarios
Dureza muy baja. Capacidad mínima para soportar la carga
Fácil
Moderadamente duro para cortar
300
350
32
38
350
400
500
550
38
43
51
55
Materiales duros para cortar, se
les considera como el límite
extremo de la maquinabilidad
Muy dura para cortar. Muchos
talleres no pueden manejarla
Requiere de rectificado para su
acabado
587
58
63
Requiere de rectificado para su
acabado
65
70
Puede
superficialmente
maquinado final
Dureza baja, capacidad de carga moderada. Ampliamente usada
en trabajos industriales
Dureza media. Buena capacidad de carga. Ampliamente usada
en trabajos industriales
Dureza alta. Capacidad de carga excelente. Se les emplea en
trabajos en los que se requieren altos rendimientos y peso
reducido
Dureza alta. Excelente capacidad de carga a condición de que el
tratamiento térmico desarrolle la estructura apropiada
Dureza muy alta. Buena capacidad para el desgaste. Puede
carecer de resistencia
Dureza completa. Usualmente obtenida como una dureza
superficial por medio de carburización o cementación
superficial. Muy alta capacidad de carga para engranes de
aeronáutica, automotrices, camiones, tanques, etc.
endurecerse
Superdureza. Generalmente se obtiene por nitruración. Muy alta
después
del
capacidad de carga
Tabla 24 – Niveles de dureza relativos para engranes de acero y fundición
Los datos existentes muestran que un amplio rango de propiedades pueden obtenerse por medio del
tratamiento térmico apropiado de un acero. También el contenido de aleación y el contenido de
Carbono de un acero afectan profundamente las reacciones a un tratamiento térmico dado.
Debido a la gran cantidad de tipos de aceros disponibles para la fabricación de engranes, a
continuación se dan algunos lineamientos generales para facilitar su selección:
-
Elíjase un acero con un contenido de agregados de aleación no mayor del precisamente
necesario, para poder templar correctamente el engrane, de acuerdo con su tamaño.
- Si el desgaste es un problema, un contenido más alto de Carbono puede ser de gran utilidad.
- Si el problema es la dificultad del
Paso Espesor de
maquinado, será ventajoso emplear
Dureza
Aceros para engranajes
Pd
pared[plg]
aceros con contenido de Carbono más
Endurecimiento total
bajo.
200 HB 1045, 1137, 1335, 4047
10–30
½
- Hay que considerar los precios
300 HB 1045, 1060, 3140, 4047
del acero en bruto y los costos para
200 HB 1045, 1060, 3140, 4047
5 - 15
1
300 HB 2340, 3140, 3250, 4140, 4340,4640
convertirlo
en
engranajes,
200 HB 1060, 2340, 3250, 4340, 5145,52100 seleccionándose el material que arroje
2½-8
2
300 HB 2340, 3250, 4340, 4640, 8640, 9840
el costo total más bajo del engrane
200 HB 2340, 3250, 4140, 4340, 4640, 9840
1¼-4
4
adecuado,
capaz
de
dar
el
300 HB 3250, 4340
rendimiento
que
se
requiere.
Carburización
10–30
5 - 15
2½-8
½
1
2
58 RC
58 RC
58 RC
1015, 1025, 1118, 1320, 4023, 9310
2137, 4620, 6120, 8260, 9310
4620, 9310
El espesor de pared se basa en la sección más gruesa de la llanta, del plato, o de la
flecha misma, elementos que deben mantener el mínimo de dureza en toda su extensión.
Las durezas indicadas representan valores mínimos; 300 HB indican un margen entre
300 y 350 HB.
Tabla 25 – Recomendaciones generales sobre aceros para diferentes tamaños
La Tabla 25 muestra, de una manera
general, que aceros deben tomarse en
cuenta para piezas de engranajes de
diferentes tamaños y durezas, la
misma está limitada al mostrar
únicamente algunos aceros tipo que
Engranajess: Diseño y Cálculo
54
deben usarse para los tamaños anotados. Muchas otras aleaciones no indicadas aquí han sido usadas
con buenos resultados en ciertas aplicaciones.
La durabilidad superficial de los dientes es aproximadamente proporcional al cuadrado de la dureza
superficial. Esto significa que los dientes con una dureza de 600 HB en la superficie pueden
soportar 9 veces la carga de un engrane que tiene únicamente una dureza superficial de 200 HB.
Generalmente, el límite de maquinabilidad es de alrededor de 350 HB. Además de esto, la
resistencia a la flexión de los dientes de endurecimiento integral alcanza su máximo en el rango de
350 a 400 HB y disminuye
Método
Descripción del método
ligeramente en las durezas más altas.
Carburizado
Nitrurado
Endurecimiento
por inducción
Endurecimiento
poco profundo
Carbonitrurado
Los dientes son usualmente acabados por corte, carburizados y
rectificados. Algunas veces los engranes de D < 12” son
terminados antes del carburizado y la distorsión es lo
suficientemente baja como para permitir el uso sin rectificado
Los dientes son usualmente acabados antes del endurecido. Si
esto se hace de manera adecuada, los engranes nitrurados no se
distorsionan mucho. Además el nitrurado superficial es tan
delgado que puede ser dañado por el rectificado
Los dientes son usualmente acabados antes del endurecido. Si
esto se hace de manera adecuada y el paso no es tan tosco, la
deformación es muy baja. Estos engranes tienen una capa
endurecida profunda y pueden ser rectificados sin peligro
excepto en el caso de engranes aeronáuticos que tienen que
soportar cargas críticas
Los dientes pueden o no, ser rectificados
Los dientes son usualmente acabados antes del carbonitrurado
Tabla 26 – Métodos para el endurecimiento localizado de los dientes de engranes
La situación plantea el problema de
cómo aprovechar la ventaja de la alta
durabilidad superficial de los
engranes en rangos de dureza arriba
de 350 HB y, al mismo tiempo, tener
buena resistencia a la flexión y un
medio de hacer los engranes con
dientes exactos. La respuesta a este
problema está en el endurecimiento
localizado de los dientes. La Tabla 26
muestra cinco métodos comúnmente
usados para el citado endurecimiento.
La mayoría de los materiales usados para engranes, que no sean los aceros, no están sujetos a
control de dureza por medio de tratamiento térmico. La composición, más que el tratamiento
térmico, es la que determina la dureza de la mayoría de los bronces, zinc, plásticos y laminados. Las
aleaciones de cobre conocidas como bronce, son útiles cuando la resistencia a la corrosión es un
factor importante y también cuando se tienen velocidades de deslizamiento altas, debido a su
habilidad para reducir la fricción y el desgaste estos materiales son muy usados en reductores de
engranajes de ruedas de tornillos sinfín. Las aleaciones de aluminio y zinc son usadas en la
fabricación de engranes por el proceso de fundición a troquel.
Los engranajes no metálicos o de materiales “plásticos” se aplican con frecuencia para reducir
ruidos objecionables en un medio ambiente especial. También amortiguan choques y vibraciones y
son económicos. Las principales desventajas son la baja capacidad para soportar carga y la baja
conductibilidad de calor, que produce distorsión en los dientes. Recientemente se han utilizado
resinas termoplásticas reforzadas con fibra de vidrio y un lubricante como aditivo, que tienen gran
capacidad de carga, expansión térmica reducida, grandes resistencias al desgaste y a la fatiga, sin
embargo, el principal problema con que el diseñador se enfrenta es el que muestran una gran
variación en sus propiedades.
6.7.3. Elección del número de dientes:
Debe adoptarse el número de dientes del piñón lo más bajo posible dentro de las condiciones de
funcionamiento normales a efectos de tener una transmisión compacta. El número de dientes de la
rueda o engrane surgirá, lógicamente, de la relación de transmisión deseada.
Contemplando solamente la resistencia, sin tener en cuenta el desgaste, el valor más bajo que puede
adoptarse está limitado por la interferencia (Tabla 2). Recién hay un balance entre estas dos fuerzas
para aproximadamente 25 dientes siendo Ø = 20°, para ángulos de presión menores los valores del
número de dientes son mayores.
Engranajess: Diseño y Cálculo
55
Si aumentamos el número de dientes la resistencia empieza a
ser crítica con respecto al desgaste, principalmente pasando
los 25 dientes; llegado a un valor de 50 dientes, si bien se
consigue una excelente resistencia a desgaste y muy buen
resultado en lo que se refiere al ruido de la transmisión, sólo
cumple las condiciones de resistencia si se lo hace trabajar a
grandes velocidades, o sea, donde baja el valor de la fuerza
tangencial.
Todo aumento del número de dientes debe ir acompañado
con una mayor velocidad. Lógicamente, la cantidad de
dientes para lograr el mencionado equilibrio también es
función de la dureza del material del engrane, en la Tabla 27
se dan valores orientativos.
Zp
19-60
19-50
19-45
19-45
19-38
19-35
19-30
17-26
15-24
Relación
i
1 - 1.9
2 - 3.9
4 - 8.0
1 - 1.9
2 - 3.9
4 - 8.0
1 - 1.9
2 - 3.9
4 - 8.0
Paso Pd
Dureza
[plg]
1 - 19.9 200 - 240 HB
1 - 19.9
33 - 38 RC
1 – 19.9
58 - 63 RC
Tabla 27 – Recomendaciones generales sobre números
de dientes del piñón para engranajes rectos y
helicoidales
6.7.4. Cargas en los apoyos:
No importando la perfección con la que sea diseñado y se fabrique un engranaje, éste debe ser
montado correctamente, manteniendo todas sus reacciones y momentos dentro de las condiciones
previstas, si es que ha de tener un funcionamiento libre de fallas.
La función principal de un engrane es transmitir movimiento
y/o potencia. La función principal del cuerpo de soporte es
neutralizar o crear un estado de equilibrio. Como un engrane
es un cuerpo que gira o está en movimiento, debe obtenerse
un estado de “equilibrio dinámico”, es decir, la totalidad de
las fuerzas de trabajo y momentos de entrada deben ser
igualados por la totalidad de fuerzas y trabajo de salida.
Figura 63 – Reacciones de carga en un rodamiento
W:carga combinada
Wr:carga radial a 90° del eje de rotación
Wx:carga de empuje a lo largo del eje de rotación
W’r:fuerza separadora
Wt:fuerza tangencial
Para obtener el equilibrio dinámico es preciso observar todas
las leyes de la dinámica y todas las fuerzas operantes deben
tener dirección, magnitud y punto de aplicación. Para reducir
las reacciones de los engranajes y al mismo tiempo los
cálculos necesarios sobre las cargas de sus puntos de apoyo a
su forma más simple, sin importar el número de momentos o
de fuerzas que actúen sobre un engrane, todos pueden
concretarse a dos tipos básicos de carga que son: axial y
radial (Figura 63).
A su vez, todas las reacciones de los engranajes pueden ser
descompuestas en fuerza tangencial, fuerza radial o
separadora y empuje axial (Figura 64).
Figura 64 – Reacciones de los dientes de un engrane
que recibe carga en tres planos
La única regla básica que debe ser aplicada a todos los
montajes de engranes y a los análisis mecánicos
correspondientes es que “la suma de todas las fuerzas debe
ser igual a cero y que la suma de todos los momentos debe ser
igual a cero.”
Hay dos tipos básicos de estructuras de montaje: doble soporte y voladizo o cantiléver.
Engranajess: Diseño y Cálculo
56
En la estructura de dos
soportes laterales, Figura 65
izquierda, la carga se reparte
en proporciones inversas a las
distancias de los puntos de
aplicación en relación con la
distancia total entre los apoyos.
Las reacciones de los apoyos
actúan en dirección opuesta a
la de las cargas producidas por
los engranajes.
En el montaje en voladizo,
Figura 65 derecha, la carga
actúa hacia fuera de los dos
apoyos lo que origina una
reacción o carga mayor en el
apoyo que queda más cerca del
punto sobre el que actúa la
Figura 65 – Ejemplos de montaje
carga, mientras que el apoyo
más lejano recibe una carga menor. Las cargas no actúan en el mismo sentido ya que la reacción en
el apoyo más cercano al punto de carga es opuesta a dicha carga, mientras que la reacción en el más
distante actúa en el mismo sentido que el de la carga aplicada.
Una vez que se han calculado las cargas para los apoyos de un engranaje cualquiera es conveniente
seguir ciertas reglas y recomendaciones inequívocas que han sido dadas por la experiencia, la
destreza y el sentido común. Dichas reglas son válidas en lo general para cualquier clase de
engranajes que se monten:
- Manténganse las estructuras de soporte de los
apoyos para los engranajes tan cerca de sus caras
como sea posible, pero dejando el espacio libre
necesario para aplicar la lubricación y ejecutar los
ajustes necesarios. En esta forma se eliminan los
momentos grandes, reduciéndose los problemas de
vibración.
- En cuanto sea posible colóquense sólo dos apoyos
para cada flecha de un engrane. Al momento de
proyectar la distancia entre centros para proporciones
determinadas de engranajes se deben considerar
también las flechas, chavetas y chaveteros, así como
el tamaño de los apoyos y las capacidades de carga, ya
que estos factores pueden imponer condiciones
restrictivas.
Figura 66 – Construcciones típicas
- Los dientes de los engranajes deben tener el apoyo
necesario (Figura 66), tanto por parte de la llanta o
corona (parte del disco del engrane que queda
exactamente debajo de los dientes) como del plato o
alma del disco. La corona debe tener un espesor de
metal mínimo equivalente a la altura total de los
dientes. El espesor del alma, que es la parte que tiene
Engranajess: Diseño y Cálculo
57
que soportar a la corona, debe tener una medida de 2 a 3 veces el equivalente de la altura total,
para fines comerciales (para aeronaves o cohetería, por ejemplo, 100 a 70% de la altura total de
los dientes). Con mucha frecuencia el alma lleva agujeros o huecos de aligeramiento, la medida
del cuerpo metálico entre los agujeros no debe ser menor que el ancho de éstos. La decisión de
si se usa pieza sólida o con alma depende del tamaño del diente y del diámetro de la
circunferencia primitiva, como una guía, los diámetros máximos de pieza sólida son: para Pd =
3, D = 7”, Pd = 4, D = 6”, Pd = 5, D = 5”, Pd = 6-10, D = 4”, Pd = 12-20, D = 3”; engranes
mayores se hacen con brazos, masas y llantas.
-
En los engranes montados con apoyos en ambos extremos la distancia entre los mismos debe ser
de aproximadamente el 70% del diámetro primitivo como mínimo. Cuando sólo uno de los
engranes puede ser montado entre apoyos, debe elegirse para esto el engrane que lleva la mayor
carga radial. En los engranes montados en voladizo, la distancia entre apoyos debe ser el 70%
del diámetro primitivo del engrane y la medida entre los mismos tiene que ser por lo menos el
doble de la medida del voladizo.
-
En general, en todos los tipos de engranajes, las fuerzas tangenciales que se aplican a las
superficies de contacto son diametralmente opuestas al sentido de rotación del engranaje de
mando. Los esfuerzos radiales tienden al alejamiento de las superficies de los dientes. En el
engranaje impulsado, las fuerzas actúan invariablemente en dirección opuesta a la del piñón o
fuerza impulsora. Invirtiendo el sentido de rotación cambia también la dirección de las cargas
tangenciales impulsoras, en cambio, las fuerzas separatistas tienen la tendencia a mantener la
misma dirección, la de alejamiento de los dientes (hacia el centro). Los empujes o cargas axiales
varían con todos los diferentes tipos de engranajes, pero estas fuerzas también invierten su
dirección si se cambia el sentido de la rotación, exceptuando los engranajes Zerol y los cónicos
rectos.
-
Todas las flechas de los engranajes tienen que ser verificadas en su resistencia a la torsión y en
su capacidad de carga a la flexión. La distancia entre apoyos y el diámetro de la flecha tienen
que diseñarse de preferencia en tal forma, que la velocidad de operación quede por abajo del
primer grado de velocidad crítica.
En la figura que sigue se muestran las cargas sobre los apoyos en los engranajes rectos (Figura 67).
Engranajess: Diseño y Cálculo
58
Figura 67 – Cargas sobre los rodamientos en los engranes rectos
Engranajes Helicoidales: Diseño y Cálculo
59
7. Engranajes Helicoidales:
Se analiza geometría, cinemática, diseño y cálculo de los engranajes helicoidales; se utiliza mucho
de lo visto en capítulos anteriores, se hace destacar las diferencias y cambios.
La transmisión del movimiento entre ejes paralelos puede realizarse
también con ruedas de dientes inclinados: engranajes helicoidales
(Figura 68). Mientras que en los engranajes rectos el corte de los
dientes es paralelo al eje del engrane, los
dientes de los engranajes helicoidales están
cortados en forma de hélices. Debido a que el
ángulo de la pendiente de la hélice puede ser
en dos direcciones, se usan los términos hélice
o mano derecha y hélice o mano izquierda para
distinguir los dos tipos.
En un engranaje formado por ruedas dentadas rectas, el inicio del
engrane de un diente se produce al mismo tiempo en toda su longitud.
Si los dientes tienen algo de error de mecanizado o algo de deformación debida a las fuerzas que
transmiten, se producirá un choque al iniciar el engrane de un diente
generando ruido y vibraciones. En los engranajes formados por ruedas
helicoidales, el engrane de un diente se produce de forma progresiva,
disminuyendo la producción de ruido y vibraciones respecto de los
engranajes rectos. En los engranajes helicoidales aparecen unas fuerzas
axiales que no aparecen en los rectos, aunque estas fuerzas no son mayor
inconveniente si se colocan unos rodamientos adecuados en los ejes. Una
calidad comercial de engranaje helicoidal es aproximadamente tan silenciosa
como los engranajes rectos de precisión, y su costo es menor.
Figura 68 – Engranaje helicoidal
Los engranajes están montados en flechas paralelas, que es la situación más
común usada, sin embargo, a veces se usan con flechas no paralelas, que no
se intersectan, se les denomina engranajes helicoidales cruzados (Figura 69).
Figura 69 – Engranaje
helicoidal cruzado
7.1. Geometría:
Se analiza previamente la superficie denominada
helicoide desarrollable, posteriormente los elementos
geométricos y la normalización. También se define el
número virtual de dientes que posteriormente se utilizará
en el cálculo.
Si sobre un cilindro (cilindro base) de radio (rb) se traza
una hélice (hélice de retroceso) de paso (p) y ángulo (r)
(de inclinación o retroceso, respecto del plano normal al
eje del cilindro), el lugar geométrico de todas las
tangentes a dicha hélice es una superficie reglada
denominada: helicoide desarrollable. Como las
generatrices de una superficie reglada desarrollable son
tangentes a una curva denominada arista de retroceso de
la superficie, por lo tanto, el helicoide desarrollable es
una superficie reglada desarrollable cuya arista de
retroceso es la curva que se ha llamado hélice de
retroceso (Figura 70).
Figura 70 – Helicoide desarrollable
Engranajes Helicoidales: Diseño y Cálculo
60
Las principales propiedades de este helicoide son:
-
Es una superficie reglada desarrollable.
Las generatrices de la superficie, tangentes a la hélice de retroceso, forman un ángulo constante
con el eje del cilindro base, complemento del ángulo de retroceso de la hélice.
Los planos tangentes al cilindro base () cortan al helicoide según una de las rectas
generatrices.
Las secciones del helicoide con planos normales al eje del cilindro base ( ) son evolventes del
círculo directriz del cilindro, con su punto de arranque sobre la hélice de retroceso.
Las secciones del helicoide con cilindros concéntricos al cilindro base y de radio R > rb, son
hélices de igual paso que la de retroceso y, en consecuencia, de menor ángulo de inclinación ()
p = 2 rb tg r = 2 R tg , por lo tanto, tg r = tg R/ rb
Entonces, el helicoide desarrollable puede concebirse generado por las sucesivas posiciones de una
evolvente de un círculo que se desplaza con un movimiento helicoidal guiada por una hélice trazada
sobre un cilindro concéntrico con el cilindro cuya
directriz es el círculo base de la evolvente.
Si una pieza de papel cortada en la forma de un
paralelogramo (Figura 71) se enrolla alrededor de un
cilindro, el borde mayor del papel se convierte en una
hélice; si desenrollamos dicha tira, cada punto del borde
citado genera una curva evolvente, esta superficie
obtenida cuando todo punto del flanco genera una
evolvente recibe el nombre de helicoide de evolvente. La
forma del flanco del diente es un helicoide de evolvente.
Figura 71
Se denomina rueda frontal equivalente a la rueda de
dientes rectos, que resulta de seccionar a la rueda de
dientes helicoidales, con un plano normal al eje de giro
(sección A-A Figura 72). (rb) y (r) definen al helicoide
desarrollable que limita en sus flancos al diente de la
rueda helicoidal cuyo perfil frontal (rueda frontal
equivalente) tiene un ángulo de presión (t) y determina
en su traza con el cilindro primitivo una hélice de ángulo
de inclinación (). Siendo R = rp el radio primitivo:
rb = rp cos t
y
tg r = tg / cos t
Otros elementos geométricos que se definen en las
ruedas helicoidales son:
-
Angulo de inclinación del diente (): es el
comprendido entre una tangente a la hélice primitiva
y un elemento del cilindro primitivo que la corta y
que es paralelo al eje, se cumple: + = 90°
Figura 72 – Elementos geométricos
No hay valores estándar para los ángulos de la hélice debido a que raras veces se intercambian los
engranes, lo usual es tener ángulos entre 15 y 30°.
Engranajes Helicoidales: Diseño y Cálculo
61
Los engranajes helicoidales acoplados
deben tener el mismo ángulo de la
hélice, pero el uno en sentido contrario
al otro (Un piñón derecho engrana con
una rueda izquierda y viceversa,
Figura 73).
Figura 73
Figura 74 – Doble helicoidal
-
Algunas veces se hacen con ángulos fuera de esta gama de valores, sin
embargo, como se verá más adelante, la carga axial varía directamente con
la magnitud de la tangente del ángulo de la hélice, hay un límite superior
para su valor a fin de prevenir cargas axiales excesivas. También es
necesario tener un límite inferior para asegurar tener una transferencia
suave de la carga (0-5 para velocidades lentas, 10-25 para velocidades
medias, hasta 30 para velocidades altas). Se pueden emplear ángulos entre
30 y 45° con engranajes helicoidales dobles, éste consiste de un engranaje
helicoidal con la mitad de su cara cortada con hélice en dirección opuesta a
la hélice de la otra mitad de la cara, cancelándose las cargas axiales para
cada par de dientes (Figura 74).
Angulo de presión normal (n): es el ángulo que forma la normal al plano tangente común de
los helicoides desarrollables en correspondencia con la generatriz de contacto, con el plano
tangente común a los cilindros primitivos. De la Figura 74:
tg n = gc / pg = ( ab / pg ) ( ap / ap) = ( ab / ap ) ( ap / pg ) = tg t cos
Las proporciones de diente intercambiable con
ángulo de presión de 20° se suelen utilizar para
engranajes helicoidales aunque no existe otra
razón que la comodidad de fabricación, excepto
cuando pueda producirse interferencia. Cuando
sea adecuado, se pueden adoptar addendums
desiguales. Con ángulo de presión constante en
el plano diametral, las superficies exteriores en
la cara superior de los dientes se estrechan
cuando aumenta el ángulo de la hélice; esto da
lugar a dificultades en el tratamiento térmico,
cuando los dientes son casi puntiagudos, la
punta se hace excesivamente dura y frágil y
puede originar averías por rotura. Una
disposición a adoptar en este caso es acortar
algo los dientes con lo que éstos tienen menos
Figura 74
punta, algunos fabricantes adoptan un ángulo de
presión de 25° y proporciones de altura completa, lo que contribuye a mejorar la capacidad y
uniformar la acción cinemática en comparación con los dientes cortos o truncados.
-
Paso normal (pn): distancia entre las hélices determinadas sobre el cilindro primitivo por los
flancos homólogos de dos dientes consecutivos, medida sobre una normal a las mismas.
Engranajes Helicoidales: Diseño y Cálculo
62
-
Paso circunferencial o transversal (pt): paso de la rueda medido sobre la circunferencia primitiva
de una sección normal, no es sino el paso de la rueda frontal equivalente.
-
Paso axial (pa): es la distancia entre puntos correspondientes sobre dientes adyacentes medida en
dirección axial.
pn = pt cos
y
pa = pt / tg
Si el ángulo del diente se reduce a cero, el paso normal se hace igual al paso transversal, el paso
axial tiende hacia el infinito y el diámetro del cilindro primitivo se convierte en el diámetro
primitivo del círculo primitivo del engrane recto que resulta.
-
Normalización: Como el módulo está relacionado con el paso por el factor π, se definen dos
módulos, el normal (Mn), que es el que se toma como base de medidas, y el módulo
circunferencial (Mt), que se aplica para obtener el número de dientes que ha de tener la
circunferencia primitiva. Como los engranes helicoidales rara vez se utilizan en forma
intercambiable y puesto que muchos diseños funcionan bien entre sí, hay poca ventaja en
hacerlos intercambiables. Como guía general las dimensiones de los dientes se basan en ángulos
de presión normal de 20°. Entonces se pueden utilizar la mayor parte de las proporciones
utilizadas para los engranes rectos. Si los engranajes helicoidales están fabricados con fresasmadre cilíndricas normalizadas, lo que es una práctica común, el módulo normal es el
normalizado:
Mn = pn / - Mt = pt /
Primero se calcula el diámetro primitivo (Dp) para engranes helicoidales:
𝐷𝑝 =
𝑝𝑡
𝑀𝑛
𝑍 = 𝑀𝑡 𝑍 =
𝑍
¶
cos 𝜓
Diámetro exterior (De): es igual al diámetro primitivo más dos veces la
altura de la cabeza del diente. Si la altura de la cabeza del diente se toma
igual a (Mn), será:
𝐷𝑒 = 𝐷𝑝 + 2𝑀𝑛 = 𝑀𝑡 𝑍 + 2𝑀𝑛 =
𝑀𝑛
cos 𝜓
𝑍
𝑍 + 2𝑀𝑛 = 𝑀𝑛 (cos 𝜓 + 2)
Diámetro interior (Di): es igual al diámetro primitivo menos dos veces la
altura de la raíz del diente. Si la altura se toma igual a 1,25 Mn, será:
𝐷𝑖 = 𝐷𝑝 − 2𝑥1.25 𝑀𝑛 = 𝑀𝑡 𝑍 − 2.50 𝑀𝑛 =
𝑀𝑛
𝑍
𝑍 − 2.50 𝑀𝑛 = 𝑀𝑛 (
− 2.50)
cos 𝜓
cos 𝜓
Distancia entre centros de ejes (C): la distancia entre los centros de los ejes paralelos de dos ruedas
helicoidales engranadas entre sí, está dada por la siguiente expresión:
𝐶=
-
𝑀𝑡
𝑀𝑛
(𝑍1 + 𝑍2 ) =
(𝑍 + 𝑍2 )
2
2 cos 𝜓 1
Ancho del engranaje (b): con objeto de asegurar una transferencia suave de la carga, el ancho de
la cara de un engranaje helicoidal por lo general se hace un 20% más grande que el paso axial,
este es sólo un valor mínimo sugerido, de hecho algunos diseñadores prefieren que el ancho de
la cara sea por lo menos el doble del paso axial.
Engranajes Helicoidales: Diseño y Cálculo
63
- Número virtual o equivalente de dientes (Zv): es el número de
dientes del engranaje recto equivalente en el plano normal. La
Figura 75 ilustra un cilindro cortado por un plano oblicuo ab según
un ángulo () a una sección recta. Dicho plano corta un arco (al
cortar todo el cilindro es una elipse) que tiene un radio de curvatura
(R). En el caso de la condición de que = 0°, R = D/2. Si el ángulo
() varía lentamente de 0 a 90°, se verá que (R) comienza en un
valor de D/2 y aumenta hasta infinito. El radio (R) es el radio
primitivo de un diente de un engranaje helicoidal cuando se observa
en la dirección de los elementos de los dientes. Un engrane recto del
mismo paso (en dicho plano) y con el radio (R) tendrá un mayor
número de dientes en virtud del aumento en la longitud del radio, a
éste se lo conoce como número virtual de dientes. El número
equivalente de dientes, en vez del número real, define la forma del
Figura 75 – Número virtual de dientes
diente en el plano normal. Es necesario conocer este número en el
diseño por resistencia a la flexión y también, en algunas ocasiones, al cortar dientes
helicoidales. Este radio de curvatura aparentemente mayor significa que se pueden utilizar
menos dientes en engranajes helicoidales, puesto que habrá menor rebaje.
Por geometría analítica: R = D / 2 cos2 , de acuerdo a lo mencionado anteriormente:
Zv = 2 R / Mn = D / Mn cos2 = D / Mc cos3 = Z / cos3
Para que dos engranajes helicoidales puedan engranar en flechas paralelas, sus ángulos de hélices
deben ser de dirección opuesta, además deben tener el mismo paso e igual ángulo de presión.
7.2. Cinemática:
Se analizan las características del engrane, se
determinan arco de engrane y grado de recubrimiento.
Para analizar el engrane helicoidal se lo considera
dividido en ruedas de ancho infinitésimo que se
suponen de dientes rectos y cuyo perfil es el de la
rueda frontal equivalente, dichas ruedas elementales
están desplazadas relativamente a lo largo de una
hélice trazada sobre el cilindro primitivo. El lugar de
las líneas de engrane de todas las ruedas elementales
determina la superficie de engrane, que es un plano
dado que la línea de engrane de cada una de ellas es
una recta inclinada según el ángulo de presión
transversal (t) respecto de la tangente común a las
circunferencias primitivas y que pasa por el punto
primitivo (I), tal línea de engrane es además tangente a
las circunferencias bases de las evolventes que definen
los perfiles en contacto.
Figura 76 – Líneas de engrane
Entonces, los puntos de engrane se hallan sobre un plano tangente a los cilindros bases de los
helicoides, que pasa por lo tanto por la generatriz de contacto de los cilindros primitivos y forma un
ángulo (t) con el plano tangente común a aquellos.
Engranajes Helicoidales: Diseño y Cálculo
64
Los puntos de engrane de todas las ruedas elementales determinan en cada instante una curva de
engrane o curva de contacto, que resulta de la intersección del plano del engrane con el flanco del
diente. Como la intersección del helicoide desarrollable con un plano tangente al cilindro base es
una recta generatriz del mismo, las curvas de contacto son en cada instante rectas tangentes a la
hélice de retroceso del flanco del diente, que forman un ángulo constante con el eje de la rueda, las
ruedas de contacto son alabeadas entre sí.
Los dientes no entran en contacto íntegramente en forma instantánea, como en las ruedas de dientes
rectos, sino que el engrane comienza y termina paulatinamente, en forma gradual. Debido a esto los
dientes no golpean al entrar en contacto. El engrane comienza con el contacto del extremo de la
cabeza del perfil frontal de una cara o frente y finaliza con el contacto del extremo activo de la raíz
del perfil de la otra cara o frente. El arco de engrane de un diente helicoidal abarcará entonces:
-
arco de engrane de la rueda frontal equivalente (Aef): a-b en la figura.
-
arco entre los ejes de los dos perfiles frontales tomado sobre la primitiva, salto del diente (s):b-c
El grado de recubrimiento resulta:
𝑅𝑐 =
(𝑎 + 𝑏) + (𝑏 − 𝑐) (𝑎 − 𝑏) (𝑏 − 𝑐)
𝑠
=
+
= 𝐴𝑒𝑓 +
𝑝𝑡
𝑝𝑡
𝑝𝑡
𝑝𝑡
si s ~ b tg
Rc = Aef + b tg / pt
La duración del engrane de las ruedas helicoidales resulta entonces mayor que la duración del
engrane de la rueda frontal equivalente de dientes rectos, lo cual trae como consecuencia que se
tenga un mayor número de dientes en contacto simultáneamente, favoreciendo con ello la suavidad
del movimiento y disminuyendo la solicitación que soporta cada uno de los dientes.
7.3. Diseño y cálculo:
Los fundamentos de los métodos de cálculo son los mismos que se analizaron para engranajes
rectos, por lo tanto se analizarán las diferencias que surgen en dicho cálculo debido a la geometría
del engranaje helicoidal.
7.3.1. Fórmula de Lewis:
Antes de analizar los cambios del método en sí, al igual que lo realizado con los engranajes rectos,
se procede a analizar las fuerzas a las que está sometido el diente del engranaje helicoidal. En la
Figura 77 se observan las fuerzas que actúan sobre un diente del engranaje.
Dado que la fuerza normal se encuentra en un plano perpendicular a la dirección del diente y a un
ángulo (n) en relación con un plano tangente al cilindro primitivo sus componentes, expresadas en
función de la fuerza tangencial porque esta componente está relacionada directamente con la
potencia transmitida, son:
Engranajes Helicoidales: Diseño y Cálculo
-
65
Ft, componente tangencial, fuerza libre que transmite el movimiento, que solicita al diente a la
flexión: Ft = N / Vt (potencia / Velocidad tangencial)
Fa, componente axial, solicita al diente a la flexión: Fa = Ft . tg
Fr, componente radial, solicita al diente a la compresión: Fr = Ft tg n / cos = Ft tg t
Figura 77 – Fuerzas actuantes
El cálculo de los dientes se encara en la misma forma que para
los engranajes rectos, para ser consistentes con el uso de la
relación de Lewis, la fuerza utilizada debe ser la componente
tangencial perpendicular a la cara del diente (F´t, Figura 78), el
ancho ha de ser el ancho de la cara medida a lo largo del eje
del mismo diente (b´), y el paso es el normal (pn).
F´t = b´ y pn
El factor de forma puede obtenerse de la Tabla 3 (para
engranajes de dientes rectos) pero ingresando con el número
virtual de dientes (Zv) y el ángulo de presión normal (n).
Como F´t =
Figura 78
Fa Ft = Ft 1 tg 2 = Ft / cos
2
y b´ = b / cos
Entonces, la carga tangencial máxima admisible es:
2
resulta Ft = b y pn
Fb = b y pn adm
Para los engranajes helicoidales, generalmente se sugiere: 4 pt < b < 6,5 pt
Al igual que lo analizado para engranajes de dientes rectos, se puede obtener una expresión del paso
mínimo para realizar un prediseño del engranaje, para ello: en función de la potencia transmitida
(N), del número de revoluciones por unidad de tiempo de la rueda dentada (n) y del radio primitivo
(R), es posible calcular la fuerza tangencial que está siendo transmitida al engranaje (Ft):
Mm = Ft . R = N / n
Engranajes Helicoidales: Diseño y Cálculo
66
De donde, y expresando en las unidades correspondientes, se tiene:
Ft [Kg] = 71620 . N [HP] / ( n [rpm] . R [cm] ) , debiendo verificarse:
para
b = pn ,
Fb = y pn2 adm
,
Fb ≥Ft
y como Dp = ( pt / ) Z y pn = pt cos , resulta
Ft = 71620 N / [ n ( pt Z / 2 ) ] = 450.000 N cos / ( n pn Z )
pn = 76,6
3
N
cos
y adm n Z
7.3.2. Fórmula de Lewis-Barth:
Debido al contacto más suave y el efecto dinámico de las cargas más reducido que en las ruedas de
dientes rectos, el término correctivo de Barth utilizado es:
𝐾𝑣 =
43
43 + 𝑣𝑝
7.3.3. Fórmula de Buckingham – Cargas dinámicas:
Se utiliza una expresión similar a la ya analizada para engranajes de dientes rectos, en general la
carga dinámica será más pequeña que la correspondiente sobre dientes rectos sometidos a carga
similar:
Pd = Ft + Fi
Pd [ Kg ] Ft Fi Ft[ Kg ]
0,113 vt [ m / min] cos C[ Kg / cm] b[ cm] cos2 Ft[ Kg ]
0,113 vt C b cos2 Ft
7.3.4. Fatiga superficial o picado (pitting):
La carga límite o resistencia al desgaste resulta también superior a la que corresponde a ruedas
dentadas de dientes rectos similares, lo cual revela que las ruedas de dientes helicoidales resisten
más al desgaste:
Fw = Dp b Q Kg / cos2
Los símbolos tienen el mismo significado que para los engranajes cilíndricos rectos, (Kg) está
basado en el ángulo de presión normal.
7.4. Cargas en los apoyos:
El esquema de la Figura 79 representa una rueda cilíndrica de radio primitivo Rp dentada
helicoidalmente sobre la cual actúan las fuerzas tangencial Ft, radial Fr y axial Fa, conforme resulta
del engrane con otra rueda no esquematizada. Estando representadas dichas acciones en la figura
como así también las reacciones de vínculo correspondientes, estas resultan de considerar lo
siguiente:
-
Siendo Ft normal al eje de la rueda y no cruzando al mismo, su traslado a dicho eje a través de
otra Ft y una -Ft, ocasiona:
1) Un momento torsor Mt actuante sobre el eje y de valor Ft * Rp.
2) Reacciones de vínculo de la misma dirección y de sentido opuesto que ella y de valores Raft y Rbft
conforme ecuaciones de momentos flectores particulares.
Engranajes Helicoidales: Diseño y Cálculo
-
67
Siendo Fr normal al eje de la rueda y cruzando al mismo, ocasiona:
1) Reacciones de vínculo de la misma dirección y de sentido opuesto que ella y de valores Rafr y Rbfr
conforme ecuaciones de momentos flectores particulares.
-
Siendo Fa paralela al eje de la rueda, su traslado al mismo a través de otra Fa y una -Fa, ocasiona:
1) Un momento flector Mfa actuante sobre el eje y de valor Fa * Rp, que es necesario contrarrestar
con reacciones de vínculo Ramfa y Rbmfa; actuantes las mismas en el plano que contiene al eje de la
rueda y a Fa, de la misma dirección y de sentido opuesto entre sí, ocasionando un Mfa de sentido
opuesto al provocado por Fa y siendo L la distancia entre cojinetes o vínculos, de valores Ramfa =
Rbmfa = Mfa / L.
2) Reacciones de vínculo de la misma dirección y de sentido opuesto que ella. Por razones
constructivas (montaje de rodamientos de rodillos cónicos que soporten Fa) suele convenir Rafa = Fa
y Rbfa = 0 (o viceversa, es decir uno sólo de los apoyos compensa dicha fuerza).
Figura 79
Figura 80 – Sentido de la carga de empuje axial en engranajes helicoidales
Engranajes Helicoidales: Diseño y Cálculo
Figura 81 – Cargas sobre los rodamientos originadas por los engranajes helicoidales
68
Engranajes Cónicos: Diseño y Cálculo
69
8. Engranajes Cónicos:
Se analiza geometría, cinemática, diseño y cálculo de los engranajes cónicos; se utiliza mucho de
lo visto en capítulos anteriores.
8.1. Geometría
De acuerdo a lo visto en el capítulo 2, los engranajes cónicos son
aquellos que permiten transmitir el movimiento entre ejes que se
cortan.
En los engranajes cónicos las superficies primitivas de las ruedas son
conos con los vértices coincidentes en el punto de corte de los ejes.
Se utilizan cuando se debe cambiar de ángulo la dirección de la
potencia a transmitir. Operan como dos conos en contacto.
Uso común: Cambio de dirección en 90°, aunque otros ángulos son
utilizados también. Los de dientes rectos son utilizados cuando el
ruido no es un factor importante y son de costo bajo.
De la misma manera como se consideró el movimiento entre ejes
paralelos, se hace con los ejes que forman un ángulo ( ) entre ellos.
Con dos conos, cada uno con su ángulo primitivo (1+2) se
Figura 82 – Engranaje cónico
transmite el movimiento sin
resbalamiento y con una relación de transmisión constante
(i).
Siendo (C1) y (C2) las circunferencias primitivas
(circunferencias mayores de los conos primitivos), la
relación de transmisión, en forma similar a lo analizado
anteriormente, resulta:
i = n2 / n1 = R1/R2 = Z1/Z2
Siendo (n) las rpm, (R) los radios primitivos y (Z) la
cantidad de dientes. Por la Figura 83, llamando (L) a la
generatriz de contacto: R1 = L x sen - R2 = L x sen
Figura 83
Resulta: i = R1/R2 = sen /sen
Utilizando: sen = sen (- ) = 𝑠𝑒𝑛 𝛽 𝑐𝑜𝑠 𝛽2 − 𝑐𝑜𝑠 𝛽 𝑠𝑒𝑛 𝛽2
𝑖=
𝑠𝑒𝑛 𝛽 𝑐𝑜𝑠 𝛽2 − 𝑐𝑜𝑠 𝛽 𝑠𝑒𝑛 𝛽2 𝑠𝑒𝑛 𝛽
=
− 𝑐𝑜𝑠 𝛽
𝑠𝑒𝑛 𝛽2
𝑡𝑔 𝛽2
𝑡𝑔 𝛽2 =
Para ° sen β1= cos β2
𝑠𝑒𝑛 𝛽
𝑖 + cos 𝛽
y sen β2= cos β1,
tg 1 / i y tg i
por lo tanto:
Engranajes Cónicos: Diseño y Cálculo
70
Los engranajes (Figura 84) reemplazan a los conos de
fricción que transmiten el movimiento de rotación
alrededor de sus ejes a otros conos por fricción,
constituyendo estos últimos los conos primitivos de los
engranajes cónicos, sobre los cuales se realiza el
contacto entre dos engranajes cónicos que engranan
entre sí. Los dientes de estos engranajes pueden ser
rectos o helicoidales, en este último caso en arco o en
espiral. Se analizarán a continuación los engranajes
cónicos de dientes rectos.
Figura 84 – Engranaje cónico recto
Así como en los engranajes rectos el diente estaba
limitado por los cilindros exterior e interior, en este
caso (Figura 85) está limitado por los conos exterior
(cabeza) e interior (raíz). Las generatrices de los conos
de los dientes convergen al mismo punto (O). Los
dientes disminuyen progresivamente desde su parte
exterior, lugar donde tienen su origen todas las medidas
referidas al diente y a los diámetros principales, hacia
el centro donde convergen los ejes y las líneas de los
flancos del diente prolongadas.
El ancho del diente está limitado por dos conos
complementarios, concéntricos y separados a una
distancia (b). Los conos complementarios tienen sus
Figura 85
generatrices perpendiculares a las de los conos primitivos. Debido a que existen, en ese ancho,
infinitos módulos (M), pasos (p) y diámetros primitivos (Dp), a los efectos de normalizar la
nomenclatura, cuando en los engranajes cónicos, se refiere a cualquier parámetro de los citados,
siempre es sobre el mayor, es decir al más alejado del punto de concurrencia de los dos ejes. Por
convención, entonces, el paso se mide en el extremo grande del diente.
En la Figura 86 se observa la nomenclatura principal. Para obtener los distintos parámetros de los
engranajes cónicos se utilizan similares expresiones a las ya vistas para los engranajes cilíndricos,
teniéndose en cuenta la influencia de los ángulos que determinan las dimensiones del diente.
Primero se calcula el diámetro primitivo (Dp), el subíndice indicará si es el motriz (1) o el
conducido (2):
𝑝
𝐷𝑝1 = 𝑍1 = 𝑀 𝑍1
¶
Diámetro exterior (De): es igual al diámetro primitivo más dos veces la altura de la cabeza del
diente. Si la altura de la cabeza del diente (ha) se toma igual a (M), será:
𝐷𝑒1 = 𝐷𝑝1 + 2ℎ´𝑎 = 𝑀𝑍1 + 2𝑀 cos 𝛽1 = 𝑀(𝑍1 + 2 cos 𝛽1)
Diámetro interior (Di): es igual al diámetro primitivo menos dos veces la altura de la raíz del diente.
Si la altura (hb) se toma igual a 1,25 M, será:
𝐷𝑖1 = 𝐷𝑝1 − 2 ℎ´𝑏 = 𝑀 𝑍1 − 2 𝑥 1.25 𝑀 cos 𝛽1 = 𝑀 𝑍1 − 2.50 𝑀 cos 𝛽1 = 𝑀 (𝑍1 − 2.50 cos 𝛽1 )
Radio medio (Rm): es el radio sobre el cono primitivo en la mitad del ancho (b/2):
𝑏
𝑅𝑚1 = 𝑅𝑝1 − sen 𝛽1
2
Engranajes Cónicos: Diseño y Cálculo
71
Figura 86
Normalización: Los engranajes cónicos de dientes rectos estandarizados se cortan mediante
el uso de un ángulo de presión (ϕ) de 20°, adendum (ha) y dedendum (hb) desiguales y dientes de
tamaño completo; puesto que esto
incrementa la relación de contacto,
impide el rebaje y aumenta la resistencia
del engranaje (a efectos de los ejercicios
supondremos la misma normalización
que para rectos).
En la Tabla 28 se indican algunos valores
utilizados en la fabricación de engranajes
cónicos. El ancho de la cara (b) debe
tomarse menor que 1/3 de la longitud de
la generatriz del cono (L). También se
recomienda que sea menor a 10 veces el
módulo. Estas se deben a que las ruedas
cónicas suelen montarse en la parte del
eje que cae fuera de los cojinetes de éste,
y la propia flexión del eje hace que no
coincida el vértice teórico de los conos,
soportando una mayor porción de la
carga la parte posterior de los flancos.
Tabla 28 – Valores usuales para engranajes cónicos
Engranajes Cónicos: Diseño y Cálculo
72
Por lo tanto se toma el menor valor de ambas condiciones:
8.2. Cinemática:
Se analizan las características del engrane, se determinan arco de engrane y grado de recubrimiento.
Nota: Para estudiar el movimiento en los engranajes de ejes paralelos, se cortaba con un plano
normal a ambos ejes de giro de las ruedas, y sobre las circunferencias primitivas se analizaban los
tipos de curvas de los dientes (curvas conjugadas, en especial la evolvente) luego proyectando
paralelamente a los ejes obteníamos cada diente. En el caso de los engranajes cónicos, la sección
normal a ambos ejes es una esfera con centro en el punto de intersección de los mismos. Si se
analizan los tipos de curvas, se encuentra que hay que trabajar sobre una superficie esférica, esto no
es posible por no ser la superficie de la esfera
desarrollable (no está generada por una
recta). Debido a este inconveniente, se utiliza
el método aproximado de los conos
complementarios o método de Tredgold. El
método consiste, en reemplazar la esfera, por
dos conos tangentes a las circunferencias
primitivas,
que
son
perfectamente
Figura 87 – Evolvente esférica sobre el cono base
desarrollables.
Los flancos de los dientes de las ruedas
cónicas se forman mediante el desarrollo
de una evolvente cónica según se aprecia
en la Figura 87. Por este motivo todos los
puntos de la evolvente equidistan la
distancia (R) del vértice del cono base
(cono que sirve de base para la generación
de la evolvente cónica); luego la evolvente
será generada sobre una superficie esférica
y es, por tanto, una evolvente esférica.
Figura 88 – Perfil de los dientes sobre una superficie esférica.
En los engranajes cónicos puede entonces estudiarse el movimiento en sólo dos dimensiones, pero
sobre una esfera de referencia con el centro en el punto de corte de los ejes (Figura 88).
Los dos conos axoides o
primitivos cortan sobre la
esfera de referencia dos
circunferencias que ruedan
una sobre otra sin salirse de
la superficie de la esfera.
Dicha superficie esférica, en
el campo del dentado, puede
aproximarse a una superficie
cónica cuando la rueda tenga
más de ocho dientes
(aproximación de Tredgold)
según se aprecia en la Fig.
89.
Figura 89 – Aproximación de Tredgold
Engranajes Cónicos: Diseño y Cálculo
73
El cono que se utiliza de aproximación se denomina cono complementario o de respaldo y su
superficie exterior puede desarrollarse en un plano formando una sección circular (Figura 90).
Figura 90 – Conos complementarios
Desarrollando los conos complementarios se obtiene unos sectores circulares correspondientes a
unas ruedas rectas con la misma forma del diente que las ruedas cónicas. Entonces, La forma de los
dientes es similar a los de una rueda dentada recta cuyo radio primitivo sea el radio del cono
complementario (ρ). Los conos complementarios tienen sus generatrices perpendiculares a las de
los conos primitivos.
De la Figura 90 se ve que:
= R1 / cos = R2 / cos
Número virtual ó ideal de dientes (Zi) es aquel que tendría un engranaje de dientes rectos con el
diámetro primitivo: D = 2 x
Se puede deducir que:
De donde:
2 R1-2 = Z1-2 p
-
2 1-2 = Zi (1-2) p
1-2 = R1-2 / cos
Zi1 = Z1 / cos Zi2 = Z2 / cos
8.3. Diseño y cálculo:
Los fundamentos de los métodos de cálculo son los mismos que se analizaron para engranajes
rectos, por lo tanto se analizarán las diferencias que surgen en dicho cálculo debido a la geometría
del engranaje cónico.
Antes de analizar las diferencias en sí,
al igual que lo realizado con los
engranajes rectos, se procede a analizar
las fuerzas a las que está sometido el
diente del engranaje cónico.
En la Figuras 91 y 92 se observan las
que actúan sobre un diente del
engranaje.
Figura 91 – Fuerzas actuantes
Engranajes Cónicos: Diseño y Cálculo
Figura 92 – Fuerzas actuantes
74
-
Ft, componente tangencial, fuerza libre que transmite
el movimiento, que solicita al diente a la flexión:
Ft = N / Vt (potencia / Velocidad tangencial)
-
Fa1, componente axial:
Fa1 = F´r sen β1 = (Ft . tg ) sen β1
(Fuerza radial del otro engrane para 90° entre ejes)
-
Fr1, componente radial:
Fr1 = F´r cos β1 = (Ft . tg ) cos β1
(Fuerza axial del otro engrane para 90° entre ejes)
8.3.1. Fórmula de Lewis:
Si bien se puede utilizar la expresión dada por Lewis, debido a que el tamaño del diente al igual que
la fuerza que actúa sobre el flanco varía a lo largo del diente, se la debe modificar para engranajes
cónicos.
La Figura 93 representa la parte superior del
diente y un elemento de longitud diferencial
(dl) del mismo a la distancia (l) del vértice
(O) del cono primitivo, sobre el cual se
considera que actúa la fuerza (dF) de
intensidad constante, siendo (pl) el paso
circunferencial del engranaje a esta
distancia.
La expresión de Lewis para este elemento
del diente de longitud (dl) sobre el cual
actúa la fuerza (dF) y cuyo paso
circunferencial es (pl), para una tensión (t)
de trabajo, se puede escribir:
Figura 93
dF = t pl y dl
El momento torsor respecto del eje del engranaje es:
dF . r = t pl y dl r
El espesor del diente, el paso circunferencial y el radio (r) en cualquier punto, son proporcionales a
la distancia desde el vértice del cono primitivo, es decir:
r R
l L
r
Rl
L
y
pl
p
c
l
L
pl
pc l
L
Reemplazando y operando matemáticamente se obtiene:
2
p l
Rl
l
dF t c y dl R t pc y dl
L
L
L
Engranajes Cónicos: Diseño y Cálculo
75
La expresión se puede integrar para (r) variando de 0 a R y (l) variando entre L y L – b,
obteniéndose:
M t Ft .R
b b2
R t pc y L 2
1 2
l
dl
R
p
b
y
t c
L2 L b
L 3L
Despejando la fuerza (Ft ) se obtiene:
b b2
Ft r b p c y1 2
L 3L
Como el valor de (b) como máximo alcanzan la longitud de (1/3L), el término (b2/3L2) se hace igual
a (1/27) que se puede despreciar sin introducir un error apreciable, por lo que se puede escribir:
Lb
Ft t b pc y
L
Siendo (pc) el paso circunferencial en la extremidad mayor, (y) el factor de forma correspondiente al
número ideal (zi) de dientes, y (Ft) la fuerza tangencial equivalente en la extremidad mayor.
Para obtener la fuerza tangencial máxima, de la misma manera que en los engranajes anteriores, la
tensión de trabajo (t) se utiliza teniendo en cuenta la tensión admisible (adm). Entonces, la carga
tangencial máxima admisible es:
Fb = b y p adm (L-b)/L
Al igual que en los casos anteriores se podría obtener el paso mínimo:
2
Ft = 450.000 N / ( n pe Z )
Fb = r y pe σadm (L – b)/L)
pe cm 76,6 3
N HP
L
2
admKg / cm y Z n rpm L b
8.3.2. Fórmula de Barth:
Dada la similitud que tiene con los engranajes rectos se pueden utilizar los mismos coeficientes
dados para ellos.
8.3.3. Fórmula de Buckingham – Cargas dinámicas:
Se utiliza también lo analizado para engranajes rectos, teniendo en cuenta que la velocidad y la
fuerza tangencial deben calcularse para el paso normalizado (primitivo exterior).
8.3.4. Fórmula de Buckingham – Fatiga superficial:
Se analiza en forma similar a lo realizado para engranajes rectos teniendo en cuenta lo mencionado
en el punto anterior (fuerza tangencial y velocidad en el diámetro primitivo exterior) y que el factor
(Q) se calcula con los números de dientes ideales.
Engranajes Cónicos: Diseño y Cálculo
76
8.4. Cargas en los apoyos:
Para determinar las fuerzas que se originan en
los ejes y soportes cuando se usan engranajes
cónicos, se supone que todas las fuerzas que se
generan se concentran en el punto medio del
diente, (Figura 94) pese a que esta suposición
no es del todo cierta, el error que se produce es
pequeño. La carga transmitida es:
Ft
Figura 94 – Fuerzas actuantes
N
(Fuerza tangencial)
Vmed
Donde (N) es la potencia y (Vmed) es la
velocidad en el centro del diente del engranaje
considerado. Las fuerzas que actúan ya fueron
analizadas y calculadas según las figuras 91 y
92. La fuerza separadora (F´r = Ft . tg ),
Figura 95, se descompone en una fuerza radial
(Fr) y una fuerza axial (Fa).
Se analizará a continuación el efecto que las mismas tienen sobre los apoyos de los ejes cuando
entre ellos hay 90°. Por su magnitud, la fuerza radial en el árbol conducido es igual a la fuerza axial
en el árbol conductor, en las direcciones son opuestas:
Fr2 Fa1
y
Fa2 Fr1
Se prefiere el montaje
entre apoyos (con
cojinetes a ambos lados
del plano del diente)
para mejorar el soporte;
no obstante, es difícil
alcanzar tanto al piñón
como al engrane con
ejes que se intersecan.
Figura 95 – Fuerza separadora
Por lo general, el
engrane se monta entre
apoyos y el piñón en
voladizo, a menos que
haya espacio suficiente
para alojar un cojinete
en el interior del piñón
para montarlo entre
apoyos también.
Engranajes Cónicos: Diseño y Cálculo
77
En la Figura 96, y su tabla, se analizan las acciones de las fuerzas actuantes sobre los apoyos en el
caso general, a la derecha se representa el engranaje motriz. Con las ecuaciones de equilibrio
dinámico se obtienen las reacciones.
Figura 96 – Acciones de las fuerzas sobre los apoyos
(T) son las acciones de la fuerza radial del piñón (Fr1)
(A) son las acciones de la fuerza axial del piñón (Fa1)
(P) son las acciones de la fuerza tangencial del piñón (Ft1)
Número
de
soporte
I
II
III
IV
Acciones en el apoyo
de la fuerza
tangencial
P=Ft
de la fuerza
radial T=Fr1
de la fuerza
axial A=Fa1
Resultante en el apoyo
Engranajes Cónicos no Rectos
78
8.5. Engranajes cónicos no rectos
Entre las ventajas que poseen sobre los cónicos
rectos, se destaca el hecho que algunos de éstos
pueden ser empleados con ejes no concurrentes, y el
que los diámetros de las ruedas no son directamente
proporcionales a la relación de transmisión.
Tienen además varios dientes en contacto en un
mismo plano radial, lo que asegura un engrane
continuo y silencioso, permitiendo que la carga
tangencial sea transmitida gradualmente y una mayor
resistencia de los dientes a igualdad de módulos.
Por otra parte adolecen del inconveniente que tienen,
con respecto a sus similares de dientes rectos, un
menor rendimiento, debido a la influencia del ángulo
de inclinación del diente.
Existen varios tipos:
-
de dentado inclinado,
curvo,
en espiral,
hipoidales y
espiroidales,
entre otros, como se observan en la Figura 97.
Figura 97 – Tipos de engranajes cónicos
8.5.1. Engranajes cónicos de dientes inclinados u oblicuos:
Figura 98
Los dientes siguen
siendo rectos (Figura
98) pero difieren de los
cónicos rectos en que
dichos
dientes
no
convergen en el vértice
de los conos bases, sino
que se hallan inclinados
un ángulo ( ) respecto
de la generatriz de
contacto.
Una analogía de la relación que existe entre los engranes cónicos rectos y helicoidales, es la misma
que existe entre los engranajes rectos y helicoidales.
Son extremadamente útiles para aplicaciones de velocidad alta y para situaciones en las que la
reducción del ruido y vibraciones sea importante.
El ángulo de presión estándar es de 20°, aunque también se usan ángulos de 14.5 y 16°; el ángulo de
la hélice es por lo general de 35°.
Engranajes Cónicos no Rectos
79
8.5.2. Engranajes cónicos de dentado curvo o en arco de círculo:
La característica que los define es el arco de círculo
que sirve de eje al diente, cuya tangente está inclinada
un ángulo ( ) con la generatriz de los conos bases
(Figura 99).
Estos tipos de engranajes han ido perdiendo
aplicación con el desarrollo de los engranajes cónicos
de dentado en espiral.
Presentan características similares en funcionamiento
que los de dentado en espiral, por lo cual pueden
dimensionarse de acuerdo a las bases de los mismos.
Figura 99 – Cónico de dientes curvos
8.5.3. Engranajes cónicos de dentado en espiral:
Al igual que los anteriores producen el engrane sólo entre
ruedas de ejes concurrentes, siendo en este caso el eje del
diente una porción de espiral cónica de ángulo
generalmente de 20 a 35, valores mayores implican grandes
empujes axiales (Figura 100).
No pueden tener una longitud del diente mayor de un cuarto
de la longitud de la generatriz de contacto de los conos bases.
Como la construcción de este tipo de engranajes requiere el
empleo de máquinas especiales, generalmente los distintos
tipos de éstas dan el perfil del diente específico, para cada
una de ellas. El tipo de engranajes de dentado en espiral
"Gleason" (1913) es el más difundido.
Los ángulos de presión más comunes son de 16 y 20.
Figura 100 – Cónico de dientes en espiral
Un caso particular también muy usado lo constituye el
"Zerol" que tiene una espiral de ángulo nulo (Figura 101).
Los ángulos de presión más usados para el mismo son de 20;
22,5 o 25. La ventaja con respecto a los rectos
es el contacto localizado en el diente. Ejercen la
misma carga en sus soportes que los rectos,
pudiendo ser usados sobre los mismos montajes.
Figura 101 –Engranajes cónicos: zerol, espiral
Los engranajes cónicos en espiral imponen
mucho más carga de empuje en sus soportes. Un
rodamiento para carga axial se requiere
generalmente para engranajes cónicos en espiral,
mientras
que
cojinetes
simples
son
frecuentemente utilizados para los rectos o
"Zerol".
Engranajes Cónicos no Rectos
80
8.5.4. Relación de transmisión:
Si observamos las expresiones que nos dan la relación de transmisión para engranajes cilíndricos de
dientes helicoidales y cónicos de dientes rectos respectivamente y si, para el caso de engranajes
cónicos de dientes no rectos, llamamos (ß) al ángulo que forma la generatriz del cono base con el
eje del engranaje, ( ) al ángulo de inclinación del eje del diente con el eje del engranaje, se puede
ver que la relación de transmisión para éste último tipo de engranajes estará dada por:
i = sen ß1 cos1 / (sen ß2 cos2)
8.5.5. Resistencia:
De la observación de los cálculos de resistencia vistos, dadas las características de estos engranajes,
se desprende que podemos hacer extensiva la fórmula de Lewis para ruedas cónicas de dientes
rectos, introduciendo en ella el valor de "cos ".
8.5.6. Fuerzas de empuje:
Figura 102 – Fuerzas de empuje
Engranajes Cónicos no Rectos
81
Observando la rueda cónica con dientes en espiral, de la Figura 102, donde se han tomado los ejes
principales (X), (Y) y (Z), se ve que la fuerza normal al flanco del diente (Fn) tiene una componente
tangencial (Ft = Fz) en la dirección del eje (Z), una componente axial (Fy) en la dirección del eje (Y)
y una radial (Fx) en la dirección del eje (X).
Para simplificar el análisis se utiliza una terna de ejes auxiliares (X'), (Y') y (Z'). Los ejes (X') e (Y')
se hallan girados un ángulo (ß) con respecto a los ejes (X) e (Y) y el eje (Z') es coincidente con el
eje (Z).
Sobre el eje Z:
Fz = Ft = Fn cosan cos + m Fn sen
Se puede conocer Ft, entonces:
Fn= Ft / (cosan cos + m sen )
Sobre el eje Y':
FY’=Fn (cosan sen - m cos )
Sobre el eje X':
FX’ = Fn senan
Sobre el eje Y:
FY = FY’ cos ß + FX’ sen ß
Sobre el eje X:
FX = - FY’ sen ß + FX’ cos ß
Estos valores son también válidos para ruedas cónicas con dientes inclinados y con dientes en arco
de círculo.
8.5.7. Rendimiento:
Si se desea obtener en el eje conducido una potencia (N), se pierde por el rozamiento de los dientes
otra potencia (Nf) proporcional a la fuerza normal a los perfiles (Fn), al coeficiente de roce () y a la
velocidad relativa de deslizamiento entre los dientes (Vf) normal a (Fn):
Nf = Fn Vf
La velocidad Vf vale:
Entonces resulta:
Vf = V senØ / cos1
siendo Ø = ß1 + ß2
Nf = Ft2 V senØ / (cosan cos1 cos2 + m cos1 sen2)
Siendo (Ft2 . V) la potencia N recibida, dividiendo la misma por la potencia entregada (N + Nf) y
operando se halla el rendimiento del par:
cosan cos1 cos2 + m cos1 sen2
η = N / ( N + Nf ) = ----------------------------------------------------cosan cos1 cos2 + m (senØ + cos1 sen2)
Engranajes Cónicos no Rectos
82
8.5.8. Engranajes hipoidales:
Son semejantes a los de dentado en espiral, pero se usan cuando los ejes de las ruedas no son
coplanares, es decir gausos y separados por una distancia (e), pudiendo el piñón encontrarse encima
o debajo del centro de la rueda o corona (Figura 103).
Pueden considerarse como intermedios entre un engranaje cónico de dientes rectos y un engranaje
helicoidal de ejes normales, pero no es otra cosa que un caso particular de engranajes con diente en
espiral.
Figura 103 – Cónicos hipoidales
El diámetro del piñón es diferente del que tendría, para una determinada relación de transmisión, un
piñón cónico de dentado en espiral corriente. El radio (r) sigue una ley de variación hiperbólica.
Como en todas las ruedas cónicas:
tgb1 = senØ / ( 1/i + cosØ )
Figura 104 – Esfuerzos en los apoyos
Engranajes Cónicos no Rectos
83
El empleo de este tipo de engranajes está muy difundido en la transmisión de automotores, se lo
prefiere para aquellas aplicaciones en que se requieran reducciones altas de velocidad, con flechas
que no se intersectan y que requieran movimiento suave y sin ruido. Como hay deslizamiento en
sentido longitudinal a lo largo del diente, resulta una generación de calor considerablemente mayor.
Su dimensionado es semejante al de las ruedas de dentado espiral. Para el cálculo puede utilizarse la
fórmula de Lewis en forma similar a los mencionados, pero los valores del factor de forma resultan
para este caso solo aproximados.
Se utilizan ángulos de presión de 19 y 22,5; con un mínimo de 8 dientes si la relación de
transmisión es mayor que 6:1 y de 6 dientes si es menor que 6:1.
En la Figura 104 se presenta el esquema de los esfuerzos en los apoyos.
8.5.9. Engranajes espiroidales:
Se observa en la Figura 105, son una combinación entre los cónicos de dentado en espiral y los
conjuntos tornillo sinfín rueda helicoidal, lo que trae aparejado con relación a los anteriormente
tratados un mayor número de dientes en contacto, una superior capacidad de transmisión de
potencia y un mayor rendimiento, que disminuye el calentamiento y aumenta su duración.
Se usan siempre como reductores, pudiendo transmitir relaciones de hasta 1:500. Esquemáticamente
se muestran en la Figura 106 las distintas posiciones que adoptan los piñones de dentado en espiral,
hipoidal y espiroidal sobre la corona.
Figura 105 – Cónicos espiroidales
Figura 106 – Comparación de engranajes
Tornillo sinfín-rueda helicoidal
84
9. Tornillo sinfín-rueda helicoidal
El sistema de engranaje de tornillo sinfín-rueda
helicoidal (Figura 107) es utilizado para transmitir
potencia entre ejes que se cruzan, en la mayoría de los
casos perpendicularmente entre sí. Comparándolos con
otros tipos de engranajes se pueden obtener
satisfactoriamente
relaciones
de
transmisión
relativamente altas, en un pequeño volumen de espacio,
aunque quizá a costa de un menor rendimiento.
Este tipo de transmisiones, son en realidad, un caso
particular de transmisión del movimiento entre ejes
alabeados por medio de ruedas de dientes helicoidales.
Específicamente una de las ruedas tiene un diámetro
menor y un ángulo de inclinación del diente mayor de
los habituales, de manera que para que sus dientes
puedan llegar a los flancos frontales deben seguir
enroscándose en la corona, transformándose en filetes.
Figura 107- Tornillo sinfín y rueda dentada
Los problemas causados por las fuerzas de impacto producidas en el engrane de los engranajes
rectos y de otros tipos, no existe en los de tornillo sinfín. En vez de esto, los filetes deslizan en
contacto permanente con los dientes de la rueda, lo que da por resultado un funcionamiento
silencioso, si el diseño, la fabricación y el funcionamiento son correctos.
Como el deslizamiento es mayor, a veces se originan dificultades por el calor debido al rozamiento.
Es muy común que en condiciones extremas de carga, este sistema se tienda a sobrecalentar. De
hecho, esta variable debe ser muy tenida en cuenta en el diseño de la caja o cárter que incluirán los
engranajes.
La sección de un filete de tornillo sinfín en un plano diametral axial es generalmente de flancos
rectos, ya que es la sección de un diente de cremallera envolvente. Si el tornillo sinfín se moviese
sin girar en dirección de una línea recta perpendicular al eje de la rueda, la acción de los dientes en
un plano que contuviese al eje del tornillo y normal al eje de la rueda sería análoga a la acción del
diente de una cremallera sobre una rueda. Los lados rectos del filete del tornillo facilitan la
producción en cuanto a cantidad y exactitud.
Las relaciones de engrane que se consideran normales para transmisiones de fuerza son de 1:25 a
1:200. Existen también transmisiones por tornillo sin fin con relaciones de engranaje muy altas,
alrededor de 500 o 1000, pero en estos casos se utilizan para transferir pequeñas potencias.
Las ventajas de este tipo de transmisiones de movimiento comprenden:
a. Compacidad, es decir posibilidad de efectuar grandes relaciones de transmisión, siendo
relativamente pequeñas las dimensiones exteriores del conjunto.
b. Seguridad de funcionamiento y sencillez de servicio.
c. Posibilidad de auto frenado.
Las desventajas que presentan estas transmisiones son:
a. Grandes pérdidas de potencia que se presentan como pérdidas por fricción que se verá reflejada
en un aumento de temperatura del sistema, con un rendimiento de entre 75 – 85 %.
Tornillo sinfín-rueda helicoidal
85
b. Necesidad del empleo de bronces especiales y de alta calidad ya que estos materiales poseen
propiedades más favorables que las piezas similares de acero como; menor acumulación de
energía en aplicaciones elásticas, resisten a la corrosión, el umbral de fatiga es menor que el de
los aceros, además de ser mejores conductores del calor y la electricidad.
9.1. Terminología de los Sistemas Tornillo sin fin – Rueda Helicoidal
La terminología usada para describir al sinfín es muy similar a la que se usa para tornillos de
potencia.
El paso axial del tornillo es la distancia entre puntos correspondientes de dientes adyacentes, y el
avance es la distancia axial que el tornillo recorre durante una vuelta del mismo. Suele haber una
ligera confusión de términos puesto que en el tornillo sinfín el paso es el paso axial (Pt), que cuando
los ejes son perpendiculares entre sí es el mismo que el paso circular (Pc) en la rueda dentada de
tornillo sinfín; para este caso (Pt = Pc).
Lo mismo que en los engranajes helicoidales, los de tornillo sinfín tienen un paso
normal (Pcn) (Figura 108), pero el ángulo de avance del tornillo (a), que es el formado por una
tangente a la hélice primitiva y el plano de rotación es de uso más cómodo que el ángulo de la
hélice (w) del tornillo.
- L: longitud del tornillo sinfín.
- pt: paso axial entre filetes del tornillo.
- a: altura de cabeza (adendo) del filete.
- d: altura de raíz (dedendo) del filete.
- h: altura total del filete.
- a: ángulo de avance del tornillo.
- di: diámetro interior o de raíz del tornillo.
- dp: diámetro primitivo del tornillo.
- de: diámetro exterior del tornillo.
- pcr: paso circunferencial de la rueda.
- Di: diámetro interior de la rueda.
- Dp: diámetro primitivo de la rueda.
- Dt: diámetro de garganta de la rueda.
- De: diámetro exterior de la rueda.
- b : ancho axial de la rueda.
- : ángulo de la cara de la rueda.
Figura 108 - Terminología del tornillo sin fin – rueda helicoidal
El tornillo sinfín puede tener uno o más dientes ubicados en
el paso de la hélice y será de una o varias entradas. Sin
embargo la mayor parte de los tornillos tienen hélices
múltiples, de modo que el avance se obtiene multiplicando el
número de hélices (o número de entradas o dientes) por el
paso. El número de dientes o filetes comprendidos en el
espacio del paso de la hélice, será siempre un número entero.
Figura 109
La distancia axial que avanza la hélice en una revolución es
el avance o paso de hélice (P). Tanto en el cilindro primitivo
cuyo diámetro es (dp), como en los cilindros de adendum
(de), de base, etc., todas las hélices que forman la guía tienen
el mismo avance, pero el ángulo de avance varía.
Tornillo sinfín-rueda helicoidal
86
Mientras los tornillos de fuerza son generalmente de rosca simple, los tornillos sinfín tienen
usualmente roscas múltiples, a no ser que otra ventaja mecánica sea más importante que el
rendimiento. Cuando un tornillo sinfín gira una revolución completa, un punto de la circunferencia
primitiva de la rueda dentada recorre un arco igual al avance, P = N Pt, pero para calcular la
relación de velocidad es más fácil hacer uso del número de filetes “m” (o entradas) del tornillo y el
número de dientes de la rueda “Z”; i = m/ Z donde m = 1 para un tornillo de guía simple, m = 2
para uno de doble guía, etc. Si se pretende obtener una transmisión de potencia de alto rendimiento
se pueden disponer en el tornillo 4, 6 o más filetes.
9.2. Relación de transmisión
La relación de transmisión se puede obtener como en el caso general como la relación entre el
número de dientes de la rueda motriz y de la rueda conducida, pero al referirnos especialmente al
tornillo sinfín, no se denomina número de dientes sino de entradas o filetes. Si consideramos el
tornillo como rueda motriz, (generalmente cumple con esa función), la relación de transmisión
valdrá:
𝑖=
Z1
Z2
=
Dónde:
m
Z
m: número de filetes del tornillo
Z: número de dientes de la rueda
Siendo los valores comunes de m de 1 a 4, se observará que las relaciones de transmisión son
grandes y de magnitud tal que no se pueden conseguir normalmente con los engranajes cilíndricos o
cónicos comunes.
La relación de transmisión puede obtenerse también por consideraciones de otra índole: En
apariencia parecería que al girar la rueda, el filete del tornillo avanzara axialmente con una
velocidad de desplazamiento Va, igual a la velocidad tangencial de la rueda en correspondencia de
su cilindro primitivo de construcción. En apariencia entonces, el tornillo actuaría, como una
cremallera. En realidad lo que ocurre es que la sección del filete que aparece en contacto con la
rueda en un instante, es reemplazada en otros instantes por otras secciones que muestran la misma
apariencia.
La velocidad aparente de avance del tornillo es entonces igual a la velocidad tangencial del cilindro
“primitivo” de la rueda. Si el tornillo es de (m) entradas, la velocidad de avance aparente será:
𝑉𝑎 =
Espacio recorrido por el filete en una rev.del tornillo
Tiempo que tarda el tornillo en efectuar una rev.
𝑉𝑎 =
Ω
V
a
Rr
P = Paso de la hélice
t = Paso axial (Pt), distancia comprendida entre dos
filetes contiguos en dirección del eje (debe ser igual al
paso de la rueda)
La velocidad tangencial de la rueda resulta igual a:
Vt = 2 𝜋 . Rr . nr
nr
Fig. 110 Cinemática del tornillo sin fin – rueda helicoidal
P
m .t
=
= m . t . nt
1′ /nt 1′ /nt
Igualando:
𝑖=
m . t . nt = 2 𝜋 . Rr . nr
nr
m .t
m
m
=
=
=
1
nt 2π . Rr
Zr
2π . Rr .
𝑡
Tornillo sinfín-rueda helicoidal
87
9.3. Tipos constructivos
Existen dos clases de tipos de tornillo sinfín: el tipo recto o paralelo, y el tipo globoide.
a)
b)
c)
Figura 111 - Formas constructivas
-
Tornillo sin fin tipo recto. (Figura 111 a)
Constituye la forma constructiva común de las ruedas dentadas de este tipo. Las superficies
primitivas de los tornillos sinfín rectos son cilindros, y los dientes tienen perfil de envolvente
simple, esto significa que existe un único punto de contacto entre las superficies del tornillo y la
rueda helicoidal. Por esta razón el par, rueda y tornillo cilíndricos, sólo resulta apto para transmitir
fuerzas tangenciales relativamente pequeñas.
Usos de tornillos sinfín tipo recto: Se utilizan generalmente aprovechando su irreversibilidad en
aplicaciones como ascensores, grúas, mecanismos de dirección de automóviles, en algunos casos
como maquinas centrifugas.
-
Engranajes de tornillo sinfín globoide. (Figuras 111 b y c)
La característica principal de este tipo de engranaje es que tiene mayor superficie de contacto entre
la rueda y el tornillo, por lo que se dice que se envuelven el uno al otro, lo que incrementa la
capacidad de transmitir torque.
Estos sistemas pueden ser de simple o de doble
envolvente. En el conjunto de envolvente simple
(Figura 111 b), el ancho de la rueda helicoidal está
cortado con superficie cóncava, de este modo
envuelve parcialmente al tornillo al tiempo de estar
engranando. Si se talla adecuadamente la rueda
globoide, se obtiene un contacto lineal. El contacto
lineal significa una importante ventaja respecto del
contacto puntual que tiene lugar entre la rueda y el
tornillo cilíndricos.
Figura 112 - Tornillo sinfín y rueda helicoidal globoides
En el caso de doble envolvente (Figura 112 o 111 c), tanto la rueda como la longitud del tornillo
están cortados con superficies cóncavas. Como resultado de esto, ambos están parcialmente
encerrados al engranar. Este efecto hace que se tenga un mayor número de dientes en contacto y un
área en lugar de una línea de contacto como se verifica en los de simple envolvente, permitiendo
transmitir cargas mayores (alrededor de los 100 hp).
Como aspecto desfavorable se tiene la dificultad de fabricación ya que se necesitan fresadoras con
la forma determinada de los dientes y por la alta precisión de las maquinas herramientas. A pesar de
las ventajas comparativas que se obtienen por el buen contacto, el uso de esta forma constructiva
está reducido a ciertos casos especiales ya que la correcta ejecución de los dientes es problema
Tornillo sinfín-rueda helicoidal
88
delicado. Asimismo, también se debe tener en cuenta que todos estos sistemas de engrane deben
quedar cuidadosamente montados para asegurar el funcionamiento adecuado, sin embargo, los de
doble envolvente o tipo “cono”, son mucho más difíciles de montar que los de simple envolvente.
Usos de los engranajes de tornillo sinfín globoide: Reductores de velocidad (disminución del
tamaño y peso), aparejos de elevación, maquinaria textil, turbinas, aviones, máquinas para la
industria alimenticia, compuertas de barrera para canales, excavadoras, maquinas herramientas,
timones de buques, locomotoras para minería, laminadoras, tractores.
Trazado de los perfiles de los dientes: en el caso de la rueda cilíndrica y el tornillo también
cilíndrico, interesa fundamentalmente lo que acontece en el plano de simetría sobre el cual se
verificará el engrane. Se representa entonces, para realizar el estudio del engrane en este caso, un
corte en el plano diametral del Tornillo y el plano medio de la rueda.
En la Figura 113 se ven tanto la circunferencia primitiva
media de la rueda, como las generatrices del cilindro
primitivo del tornillo. En el caso particular de la rueda
helicoidal se verificará que su circunferencia primitiva
media coincide con la circunferencia de garganta del
helicoide desarrollable que define la superficie primitiva
del movimiento.
A los efectos de la transmisión de movimiento, el tornillo
actúa como una cremallera. El diente del tornillo a
medida que va girando va empujando el diente de la
rueda, produciéndose el mismo efecto aparente haciendo
girar el tornillo o desplazándolo axialmente.
Figura 113 - Trazado de los perfiles de los dientes
El perfil del tornillo será entonces en correspondencia
del corte diametral representado, el perfil de la
cremallera conjugada del perfil adoptado para el diente
de la rueda.
Si se adopta un perfil a evolvente, de ángulo de presión (α) resultará sencillo el trazado de los
perfiles por los procedimientos ya estudiados. El flanco del diente del tornillo no será un helicoide
desarrollable del tipo estudiado al tratar las ruedas cilíndricas de dientes helicoidales. El flanco del
filete del tornillo es un caso límite del helicoide desarrollable que se presenta cuando la hélice de
retroceso degenera en una recta, el eje del helicoide.
Al estudiar el caso del tornillo cilíndrico y la rueda globoide, la sección en el plano de simetría es la
misma que corresponde a la forma tornillo y rueda cilíndricos, en consecuencia no varía el filete del
tornillo, pero como se quiere obtener un contacto lineal, al diente de la rueda debe dársele una
forma tal que verifique contacto con el filete del tornillo para otras secciones distintas a la sección
media. Los dientes de la rueda no resultan entonces de sección normal a su dirección, uniforme.
9.4. Dimensiones normalizadas de los tornillos y ruedas
Como los restantes tipos de ruedas dentadas estos elementos están sujetos a normalización.
Las dimensiones de las distintas partes en función del paso de la rueda propiciadas por la AGMA
para tornillos de 1 y 2 entradas, son las siguientes (Figura 114):
Tornillo sinfín-rueda helicoidal
89
Diámetro Primitivo del Tornillo:
Dpt = 2,4 . t + 1,1 (en pulgadas)
Diámetro Primitivo de la Rueda:
Dpr = Zr . t/π = 0,318 . t . Zr (t/π = 0,318 . t)
Diámetro exterior de la Rueda:
Dre = Dpr . 2t/π + 0,954 . t
Diámetro exterior del Tornillo:
Dte = Dpt + 2 . t/π = Dpt + 0,636 . t
Ancho de la Rueda Helicoidal:
b = 2,38 . t + 0,25 (en pulgadas)
Figura 114
Para tornillos de mayor número de filetes existen otras fórmulas que relacionan las dimensiones de
sus partes con el paso de la rueda.
Ángulo de presión
El ángulo de presión para el trazado por evolventes de los perfiles de los dientes, se adopta en
función del ángulo de la hélice del tornillo, pues cuando este último aumenta debe aumentarse
también el ángulo de presión para evitar problemas de interferencia y hacer menos dificultosa la
fabricación del tornillo.
α = 14° 30’
λ < 12°
α
=
20°
12°
< λ < 20°
Los valores de (α) en función del ángulo de la hélice ( λ), son:
α = 22° 30’
20° < λ < 25°
α = 25°
λ > 25°
9.5. Materiales y fabricación de engranes de tornillo sinfín y rueda helicoidal
En la mayoría de los casos los tornillos son fabricados de acero aleado con endurecimiento
superficial (generalmente cementado). Para transmisiones de alto rendimiento se emplean
específicamente tornillos templados por inmersión o por flameado, rectificados y pulidos con una
dureza de 65 a 59 Rockwell. Por ejemplo, aceros DIN 17210 o DIN 17200.
Los materiales preferidos para ruedas de estos engranes son los bronces, especialmente de estaño y
níquel-estaño (que pueden ser o no fundidos en coquilla, un proceso que produce endurecimiento
superficial). No obstante también se emplean frecuentemente otros bronces, por ejemplo al plomo
(para alta velocidad) y los de aluminio y silicio (para engranes de baja velocidad y carga pesada).
Para reducir los costos, especialmente en ruedas grandes, se utiliza una llanta o corona de bronce
fijada a un núcleo central de hierro fundido o acero moldeado. Para transmisiones de alto
rendimiento se construye preferentemente de bronce fosforoso, por ejemplo, de GBZ14, para mayor
dureza de ejecución centrifugada, o de bronce-aluminio, o de fundición perlítica.
Con la dureza aumenta la resistencia a la rodadura y al desgaste, pero también la susceptibilidad a la
corrosión y a las exigencias de un montaje más exacto. Para transmisiones de tornillo sinfín poco
cargado o con menor velocidad tangencial, se emplean para la corona de la rueda también
aleaciones de aluminio, fundición gris, aleación de zinc y materiales sintéticos.
Tornillo sinfín-rueda helicoidal
90
La fabricación del mecanismo de tornillo sinfín se realiza de manera similar a la de engranajes,
dado que es un engranaje. Los filetes o roscas del tornillo pueden ser talladas en un torno, o con
matrices de estampar, o pueden ser fresadas con fresa de disco, talladas por generación o por fresa
madre, o cepilladas o modeladas.
Las ruedas generalmente son fresadas. Los dientes se fabrican comercialmente por dos procesos
distintos: Fundición y mecanizado. Al principio se obtenían por fundición, produciendo los moldes
con modelos completos de las ruedas. En la actualidad las ruedas fundidas se obtienen por un
proceso mixto de moldeo y mecanizado. Generalmente los dientes obtenidos aun con los procesos
de fundición perfeccionados no son adecuados para el funcionamiento a grandes velocidades por lo
que se lo utiliza para maquinaria con poca solicitación.
Muchas ruedas pequeñas hechas de zinc, estaño, aluminio y cobre son obtenidas por moldeo a
presión, consiguiéndose buena precisión y buen acabado superficial.
En el mecanizado pueden seguirse dos métodos generales: por conformación y por generación. En
el mecanizado por conformación los dientes se tallan en fresadora o limadora con un útil al que se
le ha dado la forma exacta requerida con una herramienta copiadora que da el perfil buscado
siguiendo un patrón o con escariadora.
9.6. Cálculo resistente de los dientes de la rueda de tornillo sinfín
En los conjuntos de engranajes de este tipo, los dientes o filetes del tornillo siempre son más
resistentes que los dientes de la rueda. Por lo tanto para el cálculo resistente del conjunto se aplica
la fórmula de Lewis-Barth adaptada para este caso particular y con ella se calcula exclusivamente la
rueda, ya que el filete del tornillo se encuentra menos solicitado:
Fb = b . t . y . 𝜎 ad .
1200
1200+3,28 .𝑉𝑑
𝑉𝑑 =
𝑉𝑟
𝑠𝑒𝑛 𝜓
Expresión de la resistencia del diente a la flexión (Fb), que debe ser mayor a la fuerza tangencial de
la rueda (Fx) necesaria para la transmisión, en donde:
b = ancho de la rueda (en general se toma 1,5 a 2 del paso del tornillo t)
t = paso circunferencial del dentado
y = Factor de forma del perfil del diente en el plano medio de la rueda.
𝝈ad = tensión admisible a la flexión, tabulada en los manuales.
Vd = velocidad relativa de deslizamiento entre tornillo y tuerca en metros por minuto.
- Carga dinámica de los engranes de tornillo sinfín
La carga dinámica de estos engranes se suele calcular mediante la siguiente fórmula:
Donde (Ft) es la carga transmitida calculada por la ecuación de potencia aplicada a la rueda
dentada:
Ft = 33000 HP/Vp,
con Vp en ft/min, velocidad en la circunferencia primitiva de la rueda, siendo estrictamente la
potencia la de salida, teniendo en cuenta el rendimiento del sistema.
Tornillo sinfín-rueda helicoidal
-
91
Ecuación de la carga admisible al desgaste para engranes de tornillo sinfín
Para el cálculo de la resistencia al desgaste existen varias fórmulas, no teniendo generalidad en este
caso la propuesta por Buckingham para ruedas cilíndricas.
La A.G.M.A. propicia la siguiente fórmula:
𝐹𝑤 = A . cos φ . [
600
𝜎𝑠
].
600 + 3,28 . Vr Cs
Dónde:
A = superficie del flanco de los dientes que toma contacto, o sea que realmente trabaja, proyectada
sobre un plano normal al eje del tornillo.
Ho = altura útil de los dientes
β° = ángulo que forman las secciones radiales de la rueda que se consideran extremas a los efectos
de su participación en la resistencia.
𝛗 = ángulo de inclinación del diente
𝛔𝐬 = Fatiga límite superficial o límite al desgaste, depende de los materiales en contacto y de (Zr).
Cs = factor de servicio que depende de la continuidad o discontinuidad del trabajo, de la acción
dinámica de las cargas etc.
De la figura 115, se observa que:
b/2
b
Sen / 2 = ------------- = ------------DT /2 + hc DT + 2 hc
b
= 2 arco seno ----------DT + 2 hc
Figura 115
Área del anillo
AT = ho x DT x
De lo que se puede deducir el área proyectada (A), que será:
A = AT x
ho x DT x x º
ho x DT x x º
A
360
114,6
9.7. Capacidad térmica del conjunto Tornillo sinfín – Rueda helicoidal
En muchos casos la capacidad de transmisión de potencia está determinada por la capacidad
radiante de la caja o cárter, capacidad que a su vez depende de las condiciones ambientales. De
hecho, casi todas estas unidades tienen capacidad de potencia limitada a la posibilidad de disipación
de calor de la carcasa.
Si la caja de engranes se calienta en exceso, la película lubricante se puede adelgazar demasiado y
cortarse dando lugar a que se establezca el contacto directo entre las superficies. Cuando esto
ocurre, el rozamiento aumenta, se genera más calor y, finalmente, se produce una seria abrasión y
escoriación. Los lubricantes de presión extrema (EP) reducen estas dificultades cuando los
elementos motriz y conducido son de acero.
Tornillo sinfín-rueda helicoidal
92
La transferencia de calor de la cubierta se efectúa tanto por radiación como por convección. El
calor (Q) que debe ser disipado en una caja de engranes es igual a la pérdida debida al rozamiento,
la cual se toma a su vez igual a la potencia de entrada (HPi) multiplicada por (1 - e), siendo (e) el
rendimiento de la transmisión.
La cantidad de calor que disipa la caja depende de los factores siguientes: el área de la caja, la
diferencia de temperatura entre la caja y el ambiente y la transmitancia o coeficiente de transmisión
de calor (hcr), la cual es a su vez función de la temperatura, de la velocidad del aire que incide en la
caja y de otras variables. Como las temperaturas ambientales que ordinariamente intervienen varían
poco, (hcr) varía con las dimensiones de la caja y la velocidad del aire.
La capacidad de disipación del calor de la caja de engranes, se expresa por
H = C . A . ∆t
Dónde:
A = es el área radiante de la caja de paredes lisas en pulgadas cuadradas al aire ambiente.
∆t= es el aumento de temperatura del lubricante con respecto a la temperatura ambiente. La
máxima temperatura del lubricante no debe exceder, a ser posible, de 88°C (196°F). Para reductores
de velocidad de engranes do tornillo sinfín de servicio pesado, la AGMA recomienda un área
mínima de la envoltura, con exclusión de la base, bridas y aletas o nervios
C = Coeficiente combinado de transferencia de calor.
9.8. Acciones recíprocas en el contacto entre los filetes del tornillo y los dientes de la rueda
Se
supondrá
por
simplificación a la fuerza
(Fn), resultante de las
presiones que se transmiten
entre los dientes en
contacto, normales a las
superficies de los flancos,
concentrada en el punto de
contacto
del
cilindro
primitivo del tornillo con la
circunferencia
primitiva
media de la rueda, sobre la
normal común a los ejes del
movimiento.
(Fn)
está
contenida en el plano
normal (x-y) y a la
dirección de los dientes en
contacto.
Ejes propuestos:
Eje (X) dirección eje de la rueda
Eje (Y) dirección eje del tornillo
Eje (Z) normal a los anteriores y
a los ejes del movimiento.
αn
Figura 116
= ángulo de presión de los
perfiles en contacto en el plano
A-A. (ángulo de presión real)
tes
Tornillo sinfín-rueda helicoidal
93
Se puede descomponer (Fn) según:
FH : componente en el plano X-Y
FH = Fn . cos αn
FZ : componente en la dirección Z
FZ = Fn . sen αn
Además de la fuerza normal (Fn) que se transmite entre los flancos en contacto de los dientes,
deben tenerse en cuenta las fuerzas de rozamiento que se desarrollan por el deslizamiento y que se
oponen al movimiento relativo entre ellos. La magnitud de esta fuerza es evidentemente μ.N, y su
dirección coincide con la dirección de la velocidad relativa de deslizamiento.
Tornillo Motor
Si se considera el estado de fuerzas que se presenta cuando el tornillo es el engranaje motor, (caso
más común), se ve que si el sentido del movimiento de los ejes es el indicado en la Figura 116, (Fn)
es la normal a los flancos en contacto que ejerce el filete del tornillo sobre el diente de la rueda.
Además se desarrolla sobre la rueda la fuerza de rozamiento (μ.N) que se opondrá al movimiento
relativo del diente de la rueda respecto al filete del tornillo y que tendrá en consecuencia el sentido
indicado en la figura, estando contenida en el plano X-Y.
A su vez, la rueda reacciona sobre el tornillo con una fuerza normal a los flancos en contacto (-Fn)
y sobre el filete del tornillo se desarrolla una fuerza de rozamiento (-μ.N) que se opone al
deslizamiento relativo del tornillo respecto de la rueda.
Proyectando las fuerzas sobre los ejes de referencia, se obtienen las siguientes componentes de las
fuerzas que actúan sobre la rueda, cuando el tornillo es motor, en correspondencia del contacto de
su circunferencia primitiva media con el cilindro “primitivo” del tornillo:
Fx = FH . sen 𝝍 + μ . Fn . cos 𝝍
Fy = FH . cos 𝝍 - μ . Fn . sen 𝝍
Recordando que: FH = Fn . cos αn
Fx = Fn ( sen 𝝍 . cos αn + cos 𝝍 . μ )
Fy = Fn (cos 𝝍. cos αn - sen . μ )
Fz = Fn . sen αn
Estas tres fuerzas solicitan al árbol de la rueda a diferentes estados de tensión:
Fx : FUERZA TANGENCIAL DEL TORNILLO O COMPONENTE AXIAL DE LA RUEDA, fuerza útil o momento
motor transmitido, que da el movimiento de giro del tornillo. Puede obtenerse en función de la potencia
transmitida por el árbol motor y de su velocidad angular:
Nt
Mm = 71.620 . nt =
Fx .Rt
ηt
(ηt : rendimiento de la transmisión del árbol motor)
Trasladada al eje de la ruada Fx se transforma en :
Un empuje axial : Fx
Un momento
: Fx . Rr (que flexionará al árbol)
Fy : FUERZA O COMPONENTE TANGENCIAL DE LA RUEDA, fuerza útil que provoca el movimiento de giro de
la rueda. Puede obtenerse en función del momento resistente ofrecido por el árbol conducido:
Mr = Fy . Rr . 𝜂r
(𝜂r : rendimiento de la transmisión del árbol conducido)
Trasladada Fy al eje de la ruada, se transforma en:
Una carga Normal
: Fy (que flexiona el árbol y produce empuje axial en los soportes)
Un momento torsor : Fy . Rr
Fz : FUERZA O COMPONENTE RADIAL, actúa sobre el eje de la rueda flexionándolo.
Tornillo sinfín-rueda helicoidal
94
Las reacciones a estas fuerzas (-Fn) y (-μ Fn) de la rueda actúan sobre el tornillo y sus
componentes según las direcciones de los ejes de referencia:
- Fx : Componente tangencial
- Fy : Componente axial
- Fz : Componente radial
Figura 117
Que determinan las siguientes solicitaciones sobre el árbol del tornillo:
Un Empuje Axial
Un Momento
Una Carga Normal
Un Momento Torsor
Una Carga Radial
:
:
:
:
:
- Fy
- Fy . Rt (flexiona el árbol)
- Fx
(flexiona el árbol)
- Fx . Rt
- Fz
(flexiona el árbol)
Se verá ahora cual sería la fuerza tangencial que debe aplicarse al tornillo motor, para obtener una
cierta fuerza tangencial sobre la rueda que actúa en este caso como engranaje conducido. Es decir,
fijada una (Fy) necesaria para la rueda, determinar la (Fx) que debe aplicarse al tornillo.
Dividiendo miembro a miembro las expresiones de (Fx) y (Fy) en función de (Fn):
𝐹𝑥
𝐹𝑦
=
Fn ( sen ψ .cos αn + cos ψ .μ )
Fn (cos ψ.cos αn − sen ψ .μ )
𝐹𝑥 = 𝐹𝑦 .
αn + cos ψ . μ )
Fn (cos ψ. cos αn − sen ψ . μ )
Fn ( sen ψ . cos
Si se supone que αn = 0, es decir que se desprecia
la inclinación del flanco del diente, se obtiene una
expresión simplificada de la fuerza:
𝐹𝑥 = 𝐹𝑦 .
sen ψ + cos ψ . μ
cos ψ − sen ψ . μ
Fx = Fy . Tg ( + 𝝓 )
donde 𝝓 = arc Tg μ
Tornillo sinfín-rueda helicoidal
95
Rueda Motriz
Si se quiere mover el tornillo accionando la rueda, esta ejerce una fuerza (Fn) sobre aquella
originándose una fuerza de rozamiento que actuará sobre el tornillo oponiéndose al movimiento
relativo del mismo respecto de la rueda. Manteniendo el mismo sentido de movimiento del caso
anterior, las expresiones de las componentes según las direcciones de los ejes de referencia de las
fuerzas que actúan sobre el tornillo, serán:
.
Fx = Fn ( sen 𝝍 . cos αn - cos 𝝍 . μ )
Fy = Fn (cos 𝝍. cos αn + sen . μ )
Fz = Fn . sen αn
La fuerza tangencial (Fy) que es necesario aplicar a la rueda para obtener una fuerza tangencial (Fx)
en el tornillo, vale:
𝐹𝑦 = 𝐹𝑥 .
Si se considera αn
𝐹𝑦 = 𝐹𝑥 .
0, cos αn
cos αn . cos ψ + sen ψ . μ
cos αn . sen ψ − cos ψ . μ
.
1:
cos ψ + sen ψ . μ
sen ψ − cos ψ . μ
⟶
𝐹𝑦 =
Fx
Tg ( ψ − ϕ )
9.9. Condiciones de reversibilidad e irreversibilidad
La expresión anterior Fy = f(Fx) revela que no siempre es posible transmitir el movimiento de la
rueda al tornillo. Entonces, se denomina Irreversibilidad a la condición en la que si al eje de la
rueda se le aplicara un par torsional, el sinfín no gira. Se encuentra “trabado”, este atoramiento se
debe a la fuerza de fricción entre los filetes del sinfín y los dientes de la rueda, que depende mucho
del ángulo de avance.
Cuando 𝝍 > 𝝓 Condición de reversibilidad, por lo menos teóricamente aplicando una cierta (Fy)
suficiente, es posible mover el tornillo.
Cuando 𝝍 < 𝝓 Condición de irreversibilidad, no es posible mover el tornillo accionando la rueda,
ya que el rozamiento desarrollado supera la energía puesta en juego por las fuerzas motrices.
Se recomienda que el ángulo de avance no sea mayor de 5°, aproximadamente, para asegurar que
haya autorretención. Este ángulo de avance suele requerir el uso de un sinfín de una sola entrada, y
este pequeño ángulo da como resultado baja eficiencia con valores del 60%.
9.10. Rendimiento
Se considera exclusivamente el caso de Tornillo Motor.
Para esta transformación de movimiento, el rendimiento de la transmisión resulta de la relación:
𝜂=
𝑃𝑜𝑡𝑒𝑛𝑐𝑖𝑎 Ú𝑡𝑖𝑙
Fy . Vr
=
𝑃𝑜𝑡𝑒𝑛𝑐𝑖𝑎 𝑀𝑜𝑡𝑜𝑟
Fx . Vt
Tornillo sinfín-rueda helicoidal
96
Dónde:
Vr = Velocidad tangencial de la rueda
Vt = Velocidad tangencial del tornillo
Por razones cinemáticas, los componentes normales a la
dirección de los filetes de las velocidades tangenciales
deben ser iguales:
Vn = Vr . cos 𝝍 = Vt . sen 𝝍
𝜂=
Fy . Vr
Fy
=
Tg 𝝍
Fx . Vt
Fx
𝜼=
⟶
𝑉𝑟
𝑉𝑡
= 𝑇𝑔 𝝍
cos αn . sen ψ + cos ψ . μ
. Tg 𝝍
cos αn . cos ψ − sen ψ . μ
Si se supone por simplificación αn = 0
𝜂=
𝑇𝑔 𝜓
𝑇𝑔 ( 𝜓 + 𝜙 )
Expresión similar a la que se puede deducir para el rendimiento de los tornillos de movimiento de
filete cuadrado.
Siendo (αn) por lo general no despreciable, debe tenerse en cuenta en los cálculos de rendimiento.
El efecto del rozamiento en los flancos del diente hace que estos engranajes tengan los rendimientos
más bajos de todas las transmisiones, situándose entre un 40 y un 90 % aproximadamente
dependiendo de las características del reductor y del trabajo al que esté sometido.
Factores que elevan el rendimiento
Ángulos de avance elevados en el tornillo.
Rozamiento bajo (buena lubricación) del equipo.
Relación de transmisión baja (factor más determinante)
Valores 𝜼
𝜼
100
90
80
70
60
50
40
30
20
10
0
En el gráfico se presentan los valores de
rendimiento en función del ángulo de
avance para distintos valores de μ ⟶ μ =
0,02 μ = 0,04 μ = 0,06 (decreciente)
Correspondiente a un
20
40
60
= 20°
Se verifica que el rendimiento máximo se
obtiene para valores de 𝝍=45°- 𝝓/2 ,
aumentando los rendimientos para los
mismos valores de 𝝍 con la disminución del
coeficiente de rozamiento μ.
𝝍
0
αn
80
Tornillo sinfín-rueda helicoidal
97
Como puede deducirse de las ecuaciones, el ángulo de avance, el ángulo de presión normal y el
coeficiente de fricción afectan el rendimiento del sistema. De estas variables la que tiene el efecto
mayor es el ángulo de avance (𝝍), sobre el cual el diseñador tiene mayor control. Se observa que
cuanto mayor sea (𝝍), el rendimiento aumenta hasta (𝝍 =45°) aproximadamente. Por otro lado el
número de filetes en el tornillo también tiene gran influencia en los valores de rendimiento. Por
tanto, para obtener una eficiencia alta, se usan tornillos con múltiples roscas, teniendo por cierto el
inconveniente de bajar ostensiblemente la relación de engrane resultando un sistema más
voluminoso. En general se opta por una solución de compromiso.
El coeficiente de fricción (μ) juega un papel principal en el funcionamiento de un conjunto Tornillo
sin fin rueda helicoidal, porque tiene, en forma inherente, un contacto de deslizamiento importante
entre las roscas del tornillo y los dientes de la rueda.
El coeficiente de fricción (μ) depende de los materiales usados, el lubricante y la velocidad de
deslizamiento. Los valores para tornillos sinfín de buena calidad y funcionando en baño de aceite
son del orden de 0,05. Con tornillos muy bien tallados y lubricación perfecta se pueden llegar a
obtener valores de 0,02, magnitud que puede estimarse como máxima técnicamente posible. De
existir rozamiento en seco metal con metal, asciende a valores de 0.1 a 0.15. En la mayoría de los
casos se toma en general constante, sin embargo algunos autores sostienen que depende de la
velocidad de deslizamiento.
La A.G.M.A. recomienda emplear las siguientes fórmulas para estimar el (μ) de un tornillo de acero
templado (58 HRC mínimo) rectificado o con un acabado similar, que trabaja con una corona de
bronce. La elección de la fórmula depende de la velocidad de deslizamiento:
Condición estática: Vn = 0
⟶
Baja Velocidad:
Vn < 10 pies / min ⟶
Alta Velocidad:
Vn > 10 pies / min ⟶