UNIVERSIDAD NACIONAL DEL CALLAO
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
ESCUELA DE INGENIERÍA ELECTRÓNICA
ASIGNATURA: SISTEMAS DE CONTROL II
LEVITADOR MAGNETICO
MODELO MATEMATICO
LIENALIZACION
RESPUESTA EN EL TIEMPO
DOCENTE:
BORJAS CASTAÑEDA JULIO CESAR
INTEGRANTES:
MORALES BENITES FABIAN
1323240012
2019
MODELADO Y CONTROL DE UN LEVITADOR MAGNÉTICO
I.
INTRODUCCIÓN
La levitación magnética consiste en mantener objetos suspendidos sin
existir contacto mecánico gracias a la fuerza magnética. Este proceso es
por naturaleza inestable y no lineal, esto hace que el control de estos
sistemas sea altamente desafiante. Además, se hace obligatoria la
utilización del control en lazo cerrado para mantener la levitación.
Para el diseño y simulación de los sistemas de control propuestos, se ha
utilizado Matlab, herramienta poderosa tanto para el cálculo matemático,
así como para la simulación de la respuesta de los sistemas de control
usados en esta investigación y validar su desempeño.
Cuando el sistema se encuentra en equilibrio estático, una fuerza fm actúa
sobre la esfera, además del peso de la misma. Es aquí donde se aplica la
segunda ley de Newton.
II.
ANÁLISIS
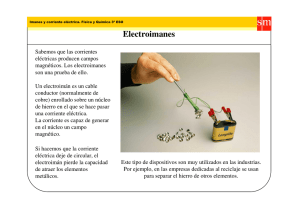
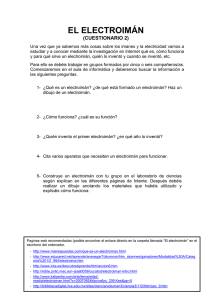
El sistema en estudio es un Levitador Magnético de naturaleza inestable,
que se muestra en su forma básica en la imagen:
La corriente que circula por el electroimán, resultado de la aplicación de un
voltaje DC, genera un campo magnético concentrado en el eje “y”. Como
consecuencia la esfera metálica está sometida a las fuerzas Gravitacional
y Magnética. Cuando estas fuerzas se equilibran la esfera llega a levitar
en la posición de equilibrio, manteniéndose en esta posición gracias al
sistema de control que se aplique.
Es posible aumentar o disminuir la fuerza magnética aumentando o
disminuyendo la corriente a través del electroimán dependiendo de la
posición de la esfera, que se determina mediante un sensor.
Variables de entrada
Voltaje a través del electroimán: u(t)
Corriente a través del electroimán: i(t)
Variables de salida
Posición de la esfera: y(t)
2.1. Modelado del sistema
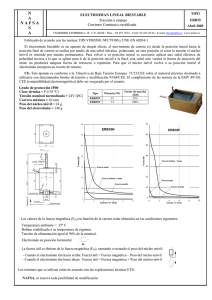
El siguiente esquema representa el sistema a controlar en su forma básica.
Para el análisis no se tomará en cuenta el transductor (sensor) que
se utiliza para determinar la posición de la esfera.
A continuación, se determinará la función de transferencia del
sistema considerando:
Entrada u(t): Tensión en voltios.
Salida y(t): Posición de la esfera tomando como referencia el electroimán
La obtención del modelo parte de la formulación de las ecuaciones
físicas y eléctricas que gobiernan el sistema, estas son:
Ecuación eléctrica
Se determina a partir de la malla que forman la fuente de
tensión u(t), la resistencia R del electroimán, y la inductancia L
del mismo.
………………….. (1)
………..……….. (2)
Ecuación física
La segunda Ley de Newton:
Aplicado al sistema:
……………..…… (3)
Dónde:
m: Masa de la esfera
a: Aceleración
g: Constante gravitacional
f m: Fuerza magnética del electroimán.
La fuerza magnética se expresa mediante:
Siendo K la constante del electroimán que viene dado por:
Dónde:
N: Número de espiras de la bobina.
μ: Permeabilidad del núcleo.
μ0: Permeabilidad del vacío.
Reemplazando f m en la ecuación (3):
………………………….. (4)
Definición de las variables de estado:
Siendo:
y(t): Posición de la esfera tomando como referencia al
electroimán.
y’(t): Velocidad de la esfera.
i(t): Corriente a través del electroimán.
Ecuaciones de estado en tiempo continuo
Reemplazando en las ecuaciones (2) y (4).
Como se observa en las ecuaciones obtenidas, el modelo
matemático del sistema es no lineal, siendo necesario linealizarlo
en torno a la posición de equilibrio.
Para esto se utiliza la serie de Taylor, dando como resultado la
matriz de estado siguiente:
Resolviendo se obtiene:
Es necesario hallar la corriente de equilibrio x30 para la
posición de equilibrio x10 = cte.
De la segunda ecuación de estado:
Reemplazando en las matrices de estado:
Reemplazando datos del sistema; para este caso particular:
Finalmente se obtienen la matriz de ecuaciones de estado en
tiempo continuo:
Ecuaciones de estado en tiempo discreto
La discretización se realiza en Matlab mediante el comando
“c2dm”, considerando:
Ts=0.001 s
Retenedor de órden 0: “zoh”
Dando como resultado la matriz de ecuaciones de estado en
tiempo discreto:
2.2. Simulación
En tiempo continuo
Se obtiene la función de transferencia en Lazo Abierto a partir
de las ecuaciones de estado.
Se obtienen los polos del sistema:
La existencia de un polo en el semiplano derecho nos indica que el
sistema es inestable.
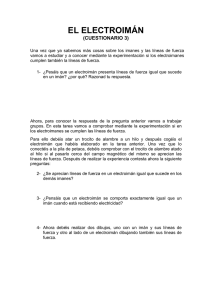
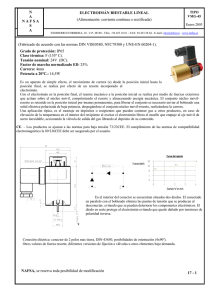
A continuación, se observan los gráficos de respuesta al escalón del
sistema en lazo abierto y el gráfico del lugar geométrico de raíces
en Matlab (El código se adjunta en el Anexo B)
Respuesta al Escalón
Lugar Geométrico de Raíces
2.2.1. En tiempo discreto
Se obtiene la función de transferencia en lazo abierto a partir
de las ecuaciones de estado en tiempo discreto:
Se obtienen los polos del sistema:
La presencia de un polo fuera del círculo unitario nos indica la
inestabilidad del sistema.
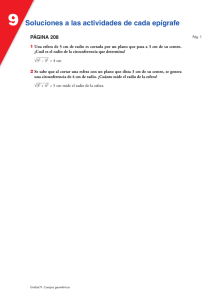
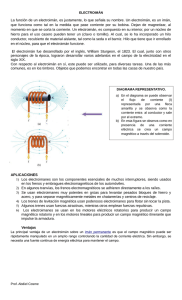
A continuación, se observan los gráficos de respuesta al escalón del
sistema en lazo abierto y el gráfico de polos y ceros en Matlab (El
código se adjunta en el Anexo B).
Respuesta al Escalón
Lugar Geométrico de Raíces
Función de transferencia en lazo abierto:
Función de transferencia del controlador:
III. ANEXOS
Anexo A. Programa en Matlab para la obtención del modelo del sistema.
m=36;
%Masa de esfera
R=9;
%Resistencia de bobina
N=1595;
%Número de vueltas de la bobina
l=0.04;
%Longitud de bobina
r=0.035/2;
%Radio de bobina
h0=0.015;
%Posición de equilibrio
u0=4*pi*10^-7;
%Permeabilidad del medio
ur=0.4364;
%Permeabilidad relativa del acero
A=r^2*pi;
%Área de bobina
L=u0*ur*N^2*A/l;
%Inductancia de la bobina
K=N^2*(u0*ur)^2/(2*u0);
%Constante del electroimán
I0=sqrt(m*9.78*h0^2/K);
%Corriente en punto de equilibrio
Ts=0.001;
%Periodo de muestreo
A=[0 1 0 ; 2*K*I0^2/(m*h0^3) 0 -2*K*I0/(m*h0^2) ; 0 0 -R/L];%Matriz de
estado en tiempo continuo
Anexo B. Programa en Matlab de la respuesta del modelo del proceso
en Lazo Abierto en tiempo continuo y en tiempo discreto.
En Tiempo Continuo:
num=[-1.1426e+003];
den=[1 268.2011 -1304 -349730];
FTLA=tf(num,den);
Polos=pole(Gp);
En tiempo discreto
num=[-1.1426e+003];
den=[1 268.2011 -1304 -349730];
FTLA=tf(num,den);
Ts=0.001;
Tf=Ts;
numd=FTLAd.num{:};