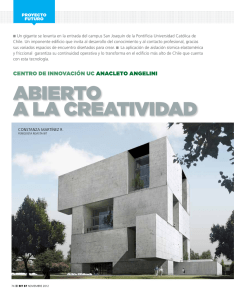
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO PROGRAMA DE MAESTRÍA Y DOCTORADO EN INGENIERÍA INGENIERÍA CIVIL – ESTRUCTURAS COMPARACIÓN DEL DESEMPEÑO SÍSMICO DE UNA ESTRUCTURA DE HOSPITAL EQUIPADA CON DIFERENTES SISTEMAS DE PROTECCIÓN SÍSMICA TESIS: QUE PARA OBTENER EL GRADO DE: MAESTRO EN INGENIERÍA PRESENTA: ING. JOSÉ ABRAHAM AGUIRRE SANTA CRUZ TUTOR PRINCIPAL: DR. JOSÉ ALBERTO ESCOBAR SÁNCHEZ 2020-1, CIUDAD DE MÉXICO, DICIEMBRE 2019 i RESUMEN Se presentan y comparan los resultados del análisis dinámico paso a paso de un modelo estructural con diseño convencional de un edificio de hospital de nueve nieveles ubicado en la ciudad de Puebla y del mismo modelo, pero equipado con distintos sistemas de protección sísmica. Son cuatro casos de estudio: Caso 1) edificio con diseño convencional a base de marcos y contraventeos concéntricos de acero que resisten las fuerzas gravitacionales y movimientos laterales de demandas sísmicas. Caso 2) edificio equipado con aisladores sísmicos de tipo péndulo de fricción, Caso 3) edificio equipado con amortiguadores viscosos no lineales y Caso 4) edificio equipado con disipadores de energía tipo CRP (Contraventeo Restringido al Pandeo). El objetivo general de los análisis es razonar críticamente sobre la influencia del uso de sistemas de protección sísmica en las estructuras y comparar el comportamiento estructural para el caso en estudio. ii Trabajo de Investigación 2020-1 Ciudad Universitaria, CDMX Presentación de Poster – Trabajo escrito fecha de entrega 29/11/19 CONTENIDO RESUMEN ...................................................................................................................... II CONTENIDO ................................................................................................................ III CAPÍTULO 1 INTRODUCCIÓN .................................................................................. 1 1.1. PLANTEAMIENTO DEL PROBLEMA ................................................................ 1 1.2. OBJETIVOS ............................................................................................................ 2 1.2.1. Objetivo general ...................................................................................................... 2 1.2.2. Objetivos particulares ............................................................................................. 2 CAPÍTULO 2 JUSTIFICACIÓN Y ALCANCES ....................................................... 3 CAPÍTULO 3 ESTADO DEL ARTE ............................................................................ 4 3.1. DISEÑO SÍSMICO BASADO EN DESEMPEÑO ................................................. 4 3.2. AISLADORES DE PÉNDULO DE FRICCIÓN ..................................................... 5 3.2.1. Diseño de aisladores de péndulo de fricción ........................................................... 5 3.3. CONTRAVENTEOS RESTRINGIDOS AL PANDEO.......................................... 6 3.3.1. Metodología de diseño ............................................................................................ 8 3.4. AMORTIGUADORES VISCOSOS NO LINEALES ............................................. 9 3.4.1. Metodología de diseño ............................................................................................ 9 CAPÍTULO 4 DESARROLLO DE LA INVESTIGACIÓN ..................................... 12 4.1. ACTIVIDADES ..................................................................................................... 12 4.1.1. Descripción de la estructura .................................................................................. 12 4.1.1.1. Geometría ........................................................................................................ 12 4.1.1.2. Materiales ........................................................................................................ 13 4.1.1.3. Cargas.............................................................................................................. 13 4.1.2. Diseño de la estructura convencional .................................................................... 14 4.1.3. Diseño de aisladores de péndulo de fricción ......................................................... 15 4.1.4. Diseño de los amortiguadores viscosos no lineales .............................................. 15 4.1.5. Diseño de los contraventeos restringidos al pandeo.............................................. 16 4.1.6. Casos de estudio .................................................................................................... 17 4.2. RESULTADOS ...................................................................................................... 18 CONCLUSIONES Y RECOMENDACIONES ....................................................................... 20 REFERENCIAS Y BIBLIOGRAFÍA ...................................................................................... 21 iii CAPÍTULO 1 INTRODUCCIÓN 1.1. PLANTEAMIENTO DEL PROBLEMA México se ubica en una de las zonas con mayor actividad sísmica en el mundo, situado geográficamente sobre el anillo de fuego del Pacífico, en él interactúan cinco placas tectónicas: Pacífico, Cocos, Norteamericana, Rivera y Caribe. Por esta razón, las estructuras deben ser diseñadas para tener la capacidad de resistir grandes demandas sísmicas, garantizando la seguridad de las personas. Así mismo, en edificaciones de gran importancia como los hospitales, es necesario que se tomen previsiones para minimizar los daños signficativos, con el fin de garantizar que las labores continúen con normalidad y se disminuyan las pérdidas económicas. Las Normas Técnicas Complementarias para Diseño por Sismo, del Reglamento de Construcciones para el Distrito Federal, vigente, (NTC-DS, 2017) suponen que las edificaciones estarán sometidas a la acción de sismos de baja intensidad y de ocurrencia frecuente, y de gran intensidad y de ocurrencia poco probable. La filosofía de diseño incluye objetivos de desempeño siguientes: Para sismos frecuentes, de baja intensidad, las estructuras no deben sufrir daños, ni en los elementos estructurales ni los no estructurales y deben continuar operativas. Para sismos severos, se permite que la estructura sufra daños generalizados y hasta puede llegar a quedar inservible, pero sin que ocurra el colapso estructural, a fin de preservar las vidas humanas. Esta filosofía de diseño puede traer consecuencias económicas y operacionales negativas. Edificaciones estratégicas como hospitales, cuarteles de bomberos, aeropuertos, entre otras, deberían continuar funcionando luego de la ocurrencia de un terremoto, por lo que es necesario que el diseño cumpla con ese desempeño sísmico. Entre las nuevas tecnologías para disminuir los efectos sísmicos en los edificios que se han desarrollado, se encuentra la incorporación de sistemas de protección sísmica. Tal es el caso de aislamiento sísmico y de disipación de energía, que han mostrado ser efectivos, tanto para estructuras nuevas, como para la rehabilitación y reparación de estructuras existentes. En países como Estados Unidos, Japón y Chile, su utilización es cada día más usual. No obstante, en México aún son escasas las estructuras diseñadas con estos sistemas. En este trabajo se presentan las metodologías de diseño para los sistemas de protección sísmica más utilizados en la actualidad que son: 1) aisladores sísmicos de péndulo de fricción, 2) amortiguadores viscosos no lineales y 3) disipadores de energía tipo CRP. Dichos sistemas, por la sencillez de sus mecanismos de funcionamiento y por su efectividad, han demostrado ser una alternativa confiable a considerar en el diseño sísmico, reduciendo daños en edificaciones, garantizando la seguridad de las vidas humanas y disminuyendo la ocurrencia de pérdidas económicas. Se comparan los resultados del análisis dinámico paso a paso en un edificio de hospital, el cual representa al “Hospital General Regional 36 IMSS San Alejandro”, con cuatro diseños diferentes. 1) Diseño convencional de acuerdo al Manual de Diseño de Obras Civiles de la Comisión Federal de 1 Trabajo de Investigación 2020-1 Ciudad Universitaria, CDMX Presentación de Poster – Trabajo escrito fecha de entrega 29/11/19 Electricidad en su versión 2015 (MDOC, 2015), 2) diseño con aisladores de base de tipo péndulo de fricción, 3) diseño con amortiguadores viscosos no lineales y 4) diseño con contraventeos restringidos al pandeo. Se utiliza el registro sísmico del sismo del 19 de septiembre de 2017 en la estación SAPP (San Alejandro, Puebla), que se encuentra en el jardín del Hospital San Alejandro. 1.2. OBJETIVOS 1.2.1. Objetivo general Fomentar el uso de sistemas de protección sísmica en estructuras de gran importancia, destacando su buen desempeño sísmico. 1.2.2. Objetivos particulares Revisar la literatura especializada, para conocer el estado del arte de los sistemas de protección sísmica. Estableces objetivos de desempeño para el edificio. Establecer un conjunto de acelerogramas que correspondan con el peligro sísmico de la zona para el análisis no lineal paso a paso. Analizar y diseñar cuatro modelos del edificio, 1) a base de marcos rígidos con un diseño convencional, 2) a base de marcos rígidos equipado con aisladores sísmicos, 3) a base de marcos rígidos equipado con amortiguadores viscosos no lineales y 4) a base de marcos rígidos equipado con CRPs Evaluar los beneficios de cada sistema con base en el desempeño estructural y ahorro de material. . 2 CAPÍTULO 2 JUSTIFICACIÓN Y ALCANCES México es un país con alta sismicidad. Entre el 2017 y el 2018, se han registrado alrededor de 78 sismos por día en promedio (SSN, 2018). En los últimos 40 años se han registrado 19 terremotos en la zona Centro-Sur del país, de magnitud Mw ≥ 7, la mayoría de los sismos han ocurrido en la zona de subducción, y solo tres se presentaron en el interior de la placa, los cuales se conocen como sismos intraplaca. Estos sismos han afectado ciudades enteras, provocando derrumbres, daños estructurales, miles de decesos y damnificados, además de numerosas pérdidas económicas. Los sismos de tipo intraplaca ocurren lejos de la costa y no se les cataloga como los más dañinos. Sin embargo, han demostrado ser muy destructivos debido a que son superficiales y ocurren principalmente a lo largo del Eje Volcánico Mexicano, donde se encuentra la mayoría de la población en el país. Un ejemplo en la historia de México, es el sismo del 19 de septiembre de 2017, exactamente 32 años después del terremoto de 1985. Tuvo un epicentro entre los límites de Puebla y Morelos, a 12 km al sureste de Axochiapan, Morelos y a 120 km de la Ciudad de México, con una magnitud Mw 7.1. Debido a la cercanía del epicentro con la Ciudad de México, la alerta sísmica sonó tardíamente, tomando de sorpresa a la población. Este sismo afectó principalmente la Ciudad de México y los estados de Morelos y Puebla. Provocando el deceso de cientos de personas, miles de damnificados, colapso de edificios, hospitales e iglesias dañadas y grandes pérdidas económicas. Un caso en particular es el Hospital General Regional 36 San Alejandro del Instituto Mexicano del Seguro Social (IMSS) en Puebla, el cual, al ser afectado por el sismo de 2017, tuvo que ser desalojado permanentemente. Dicho hospital, tenía una capacidad de más de 400 camas y más de 2,500 trabajadores. Atendía pacientes no sólo de Puebla, también brindaba atención a otros estados como Tlaxcala, Oaxaca y Veracruz, por lo que diariamente atendía en promedio 3 mil consultas médicas. Una peculiaridad de la zona donde se ubica este hospital, es que se cuenta con una estación acelerométrica en el jardín, donde se tiene el registro sísmico del sismo del 19 de septiembre de 2017. Se eligió la ubicación del Hospital San Alejandro como zona de estudio. También, se tomó como referencia la estructuración del cuerpo B de dicho hospital. Este consta de nueve niveles y una altura total de 38.1 m. De los cuatro edificios del hospital, en este se concentraron los mayores daños durante el sismo, por lo que, se diseñó nuevamente de tal manera que cumpla con el desempeño sísmico objetivo. Para esto, se utilizaron nuevos elementos estructurales de acero, empleando un diseño con las normas vigentes. Se hicieron cuatro propuestas de diseño, correspondientes a los cuatro casos de estudio antes mencionados. Es importante resaltar que, en cada zona geográfica se tiene un peligro sísmico diferente, por lo que los dispositivos aquí empleados tendrán un comportamiento diferente para cada ubicación. 3 Trabajo de Investigación 2020-1 Ciudad Universitaria, CDMX Presentación de Poster – Trabajo escrito fecha de entrega 29/11/19 CAPÍTULO 3 ESTADO DEL ARTE 3.1. DISEÑO SÍSMICO BASADO EN DESEMPEÑO El diseño sísmico basado en desempeño, DSBD, es un concepto que permite el diseño y la construcción de edificios con una comprensión realista y confiable del riesgo de vida, ocupación y pérdida económica que puede ocurrir en una estructura como resultado de futuros terremotos. El DSBD se basa en una evaluación del diseño de un edificio para determinar la probabilidad de experimentar diferentes tipos de pérdidas, considerando el intervalo de posibles terremotos que pueden afectar su estructura. Esto permite que un ingeniero seleccione el desempeño objetivo deseado para el edificio que está diseñando (Applied Technology Council, 2018). Son tres documentos los que presentan las bases para conceptos de diseño basados en desempeño: SEAOC Vision 2000; ATC 40; y FEMA 273. Los documentos intentaron desarrollar procedimientos que pueden usarse como disposiciones sísmicas en los códigos de construcción. En estos documentos, el desempeño se expresa en términos de una serie de niveles de desempeño identificados como Ocupación completa, Ocupación inmediata, Seguridad de vida y Prevención de colapso. Estos niveles de desempeño se aplican a los elementos estructurales y no estructurales, y se evalúan a un nivel de peligro sísmico especificado, como se muestra en la Figura 3.1. Figura 3.1. Objetivos de desempeño sísmico (adaptada de Vision 2000, SEAOC, 1995) Los objetivos de diseño relacionados con los niveles de desempeño estructural y de amenaza sísmica se definen por medio de distorsiones máximas de entrepiso. Algunas de las propuestas de distorsiones límite para marcos de acero contraventeados se presentan en la Tabla 3.1. Tabla 3.1. Límites de distorsión para los niveles de desempeño Desempeño ATC 40 FEMA 273 VISION 2000 NTC-DS (2017) Ocupación inmediata 0.01 0.01 0.002-0.005 0.002-0.004 Seguridad de vida 0.01-0.02 0.01-0.02 0.015 - Prevención de colapso 0.33 Vi/Pi 0.04 0.025 0.01-0.02 4 En este trabajo, se busca que los diseños tengan un nivel de desempeño de “Ocupación Inmediata” después del análisis dinámico paso a paso. Se elige el límite de distorsión propuesto por el documento de Vision 2000, por lo que los sistemas de protección sísmica estarán diseñados para distorsiones menores a 0.5%. 3.2. AISLADORES DE PÉNDULO DE FRICCIÓN El aislador de péndulo de fricción, también conocido como APF, se compone principalmente de tres partes: dos placas de acero con superficies curvas y un elemento de articulación deslizante ubicado entre ellas. Estos dispositivos se basan en las características del péndulo simple. Las ventajas de este dispositivo son que el periodo es independiente de la masa de la estructura, para variar el periodo sólo es necesario cambiar sus propiedades, como el radio de curvatura de la superficie cóncava, el coeficiente de fricción o el desplazamiento máximo al que serán diseñados. a) Aislador de péndulo de fricción b) Movimiento máximo creíble de aislador Figura 3.2. Dinámica de Aislador de Péndulo de Fricción El sistema es activado sólo cuando la fuerza de corte sobre la interfaz de aislamiento supera la fuerza de fricción estática principalmente. Una vez cuando se encuentre en movimiento, el elemento articulado se mueve a lo largo de la superficie esférica cóncava, el cual, con ayuda del peso propio de la estructura, le permite regresar a su posición original luego de un evento sísmico. Este aislador proporciona una rigidez lateral que es directamente proporcional al peso de la estructura e inversamente proporcional a su radio de curvatura. 3.2.1. Diseño de aisladores de péndulo de fricción Se determina el periodo objetivo deseado en la estructura según el peligro sísmico de la zona, teniendo como objetivo aquel periodo donde las demandas de aceleraciones y desplazamientos sean favorables para la estructura. Considerando el diseño de los aisladores para Puebla se observa que el llevar a la estructura a un periodo mayor de 3 s generaría una disminución de demandas de aceleraciones y desplazamientos a la estructura. Se propone un coeficiente de fricción y un radio de curvatura para determinar una rigidez efectiva y un periodo efectivo con las ecuaciones (3.1) y (3.2), respectivamente. 1 𝜇 𝑘𝑒𝑓𝑓 = 𝑊 ( + ) 𝑅 𝐷𝑚𝑎𝑥 5 (3.1) Trabajo de Investigación 2020-1 Ciudad Universitaria, CDMX Presentación de Poster – Trabajo escrito fecha de entrega 29/11/19 𝑇𝑒𝑓𝑓 = 2𝜋√ 3.3. 1 1 𝜇 𝑔 (𝑅 + 𝐷 ) 𝑚𝑎𝑥 (3.2) CONTRAVENTEOS RESTRINGIDOS AL PANDEO El contraventeo restringido al pandeo CRP es un tipo de contraventeo concéntrico, que proporciona la disipación de energía dúctil necesaria. La diferencia entre un refuerzo de acero fabricado típico y el CRP es la simetría de la respuesta. Un CRP está especialmente diseñado para evitar el pandeo durante el ciclo de compresión. Esto da como resultado un comportamiento altamente dúctil tanto en la tensión como en la compresión. La rigidez de un CRP es menor que la de un contraventeo concéntrico convencional, ya que la resistencia del CRP está directamente relacionada con la resistencia a tensión, mientras que en un contraventeo convencional el área generalmente debe aumentarse para obtener la capacidad requerida de compresión (Marshall J.D., 2015). Figura 3.3. Ejemplo de CRP La filosofía básica del CRP es que el elemento de acero del núcleo tiene una sección transversal diseñada para resistir tensión y compresión. Para que esto ocurra, se debe proporcionar suficiente rigidez a la flexión para que la carga de pandeo general del dispositivo compuesto sea mayor que la resistencia máxima del núcleo de acero (Marshall J.D., 2015). Esto se logra mediante el uso de un tubo de acero que generalmente es cuadrado o circular. El acero del núcleo es cubierto con una pasta de mortero para llenar el espacio, lo que permite que el tubo de acero proporcione la resistencia a la flexión necesaria para sujetar el núcleo. No es deseable que una carga axial pase por el mortero o el tubo exterior de acero. Esto se logra proporcionando un material desadherente entre el mortero y el núcleo de acero. La Figura 3.4 muestra las diferentes regiones que tiene un CRP, compuesta por la región de conexión, de transición y del núcleo. La rigidez a la flexión de la región de transición y la región de conexión es importante ya que debe ser suficiente para sostener la resistencia axial del núcleo. 6 Figura 3.4. Regiones con distintas rigideces de un CRP La ecuación para la rigidez elástica equivalente del CRP se basa en una combinación de resortes en serie que representan la rigidez axial de cada segmento. 𝑘𝑒𝑓𝑓 = 1 1 2 2 + + 𝑘𝑛 𝑘 𝑇𝑅 𝑘𝐶 (3.3) La rigidez axial de cada elemento se calcula: 𝑘𝑖 = 𝐴𝑖 𝐸 𝐿𝑖 (3.4) El comportamiento histerético representativo general de un CRP se muestra en la Figura 3.3. El CRP tiene ciclos de histéresis completos tanto en tensión como en compresión, incluido el endurecimiento por deformación. a) CRPs vs. Contraventeos convencionales b) Modelo idealizado Figura 3.5 Comportamiento histerético de los CRPs (adaptada de Guerrero, 2016) Existe un pequeño aumento en la resistencia en el lado de la compresión, que suele ser un 10% mayor que la resistencia a la tensión del refuerzo (Marshall J.D., 2015). Esto se debe a la fricción entre el núcleo y el mortero. 7 Trabajo de Investigación 2020-1 Ciudad Universitaria, CDMX Presentación de Poster – Trabajo escrito fecha de entrega 29/11/19 3.3.1. Metodología de diseño Existen varias metodologías para el diseño de estructuras equipadas con CRPs, para este trabajo se utilizó la metodología propuesta por Guerrero (2016). En esta metodología, el diseñador decide el porcentaje de participación de los CRPs en la resistencia lateral de la estructura, evaluando la estructura como un sistema dual equivalente de un grado de libertad (1GDL) tal como se muestra en la Figura 3.6. El sistema se compone por dos subestructuras independientes, estructura primaria, compuesta por marcos con conexiones rígidas (Figura 3.6b), y estructura secundaria, compuesta por marcos con CRPs con conexiones articuladas (Figura 3.6c). Figura 3.6 Estructura de VGDL equipada con CRPs representado por un oscilador dual equivalente de 1GDL (Guerrero, 2016) En la metodología, se debe determinar si los desplazamientos de la estructura en un sistema equivalente de 1GDL cumple con las distorsiones máximas de entrepiso para el nivel de desempeño objetivo (Figura 3.7). Figura 3.7. Curva de comportamiento del sistema dual (Guerrero, 2016) 8 Se procede a simular el sistema dual con la ecuación de movimiento (3.5). 𝑢̈ (𝑡) + 2(𝜉1 + 𝜉2 ) 2𝜋 𝑓𝑠1 (𝑢, 𝑢̇ ) 𝑓𝑠2 (𝑢, ů) 𝑢̇ (𝑡) + [ + ] = −𝑢̈ 𝑔 (𝑡) 𝑇 𝑚 𝑚 (3.5) donde: 𝑢, 𝑢̇ 𝑦 𝑢̈ son desplazamiento, velocidad y aceleración, respectivamente 𝑢̈ g es la aceleración del suelo 𝜉1 𝑦 𝜉2 son las relaciones de amortiguamiento los sistemas primario y secundario del oscilador dual T es el periodo del oscilador dual m es la masa modal 𝑓𝑠1,2 (𝑢, 𝑢̇ ) son las fuerzas de cada sistema (primario y secundario) del oscilador dual 3.4. AMORTIGUADORES VISCOSOS NO LINEALES Uno de los sistemas de protección sísmica que dependen de la velocidad entre sus extremos son los amortiguadores viscosos, que consisten básicamente en un cilindro de acero inoxidable con un líquido viscoso en su interior (generalmente silicón). El fluido se desplaza mediante la acción de un pistón entre cámaras por medio de orificios, generando fricción entre sus partículas y el pistón, disipando de esta forma la energía y resultando muy eficientes y prácticos cuando se busca proteger a las estructuras contra la acción de sismos fuertes (Symans et al, 2008). La Figura 3.8 muestra esquemáticamente a un amortiguador viscoso. Se observa que el amortiguamiento se genera cuando el pistón se desplaza y el silicón pasa a través de los orificios. También se ejemplifican los elementos de conexión a la estructura. Figura 3.8. Características de un amortiguador viscoso 3.4.1. Metodología de diseño Se presenta el procedimiento para el diseño de dispositivos viscosos lineales 1. Determinar las propiedades mecánicas y dinámicas de la estructura sin dispositivos viscosos (las masas 𝑚𝑖 , los pesos de cada entrepiso 𝑤𝑖 , los periodos 𝑇𝑚 y las formas modales 𝑍𝑖𝑚 de la estructura) 9 Trabajo de Investigación 2020-1 Ciudad Universitaria, CDMX Presentación de Poster – Trabajo escrito fecha de entrega 29/11/19 2. Establecer el porcentaje de amortiguamiento crítico que aportarán los dispositivos viscosos 𝜉1 . En este paso, usualmente se construye un espectro de desplazamiento de diseño en concordancia a una demanda sísmica para un sistema equivalente de un grado de libertad elástico. Se selecciona el desplazamiento objetivo (𝑑𝑚𝑎𝑥 ) y se busca un amortiguamiento en el que, en base al periodo fundamental, cumpla con ese objetivo. 3. Se calculan los pesos modales (o cargas gravitacionales modales efectivas, 𝑊𝑚 y los factores de participación modal 𝐶𝑚 , mediante las siguientes expresiones: 2 (∑𝑁 𝑖=1 𝑤𝑖 ∗ 𝑍𝑖𝑚 ) 𝑊𝑚 = 𝑁 ∑𝑖=1 𝑤𝑖 ∗ 𝑍𝑖𝑚 2 𝐶𝑚 = ∑𝑁 𝑖=1 𝑤𝑖 ∗ 𝑍𝑖𝑚 2 ∑𝑁 𝑖=1 𝑤𝑖 ∗ 𝑍𝑖𝑚 (3.6) (3.7) donde: 𝑤𝑖 = Peso correspondiente al i-ésimo nivel 𝑍𝑖𝑚 = Forma modal correspondiente al i-ésimo nivel y al modo 𝑚 𝑊𝑚 = Peso modal (o carga gravitacional modal efectiva) correspondiente al modo 𝑚 𝐶𝑚 = Factor de participación modal correspondiente al modo 𝑚 𝑁= Número de niveles 4. Se supone un valor de la constante de amortiguamiento (𝐶̅𝑖 ) para cada nivel (𝑖). Con el valor de 𝐶̅𝑖 se calcula la relación de porcentaje de amortiguamiento crítico viscoso, empleando la siguiente ecuación: 2 2 ̅ 𝑇𝑚 ∑𝑁 𝑖=1 𝐶𝑖 cos 𝜃𝑖 𝑍𝑟𝑖𝑚 𝜉𝑣𝑚 = ( ) (3.8) 𝑤𝑖 4𝜋 2 ∑𝑁 𝑖=1 ( 𝑔 ) 𝑍𝑖𝑚 donde: 𝜉𝑣𝑚 = Relación de porcentaje de amortiguamiento viscoso crítico correspondiente al modo 𝑚 𝑍𝑟𝑖𝑚 = Forma modal relativa (r) correspondiente al i-ésimo entrepiso y al modo 𝑚 𝜃𝑖 = Ángulo de inclinación del dispositivo disipador correspondiente al i-ésimo nivel 𝐶𝑖̅ = Constante de amortiguamiento correspondiente al i-ésimo nivel 𝑇𝑚 = Periodo correspondiente al modo 𝑚 10 Para el procedimiento para el diseño de dispositivos viscosos no-lineales, se contemplan los pasos hechos en los dispositivos viscosos lineales 1. Conocer la constante de amortiguamiento correspondiente al i-ésimo nivel (𝐶𝑖̅ ) para los dispositivos lineales 2. El valor de la constante 𝐶𝛼 en un dispositivo no-lineal permite disipar la misma cantidad de energía por ciclo que un dispositivo viscoso lineal, solo que este último puede inducir fuerzas excesivas en las diagonales que los soportan. Por ello se debe determinar 𝐶𝛼 y 𝛼 de la siguiente manera: 𝐶𝛼 = 𝐶 (𝜔𝑋𝑜 )1−𝛼 𝛽𝛼 (3.9) para 𝛽𝛼 = 𝛼 22+𝛼 Г2 (1 + 2 ) 𝜋Г(2 + 𝛼) donde: 𝐶𝛼 = Constante de amortiguamiento para dispositivos no lineales 𝜔 = Frecuencia fundamental de la estructura original (sin dispositivos viscosos) 𝑋𝑜 = Desplazamiento límite en los dispositivos asociado a niveles de desempeño 𝛼 = para edificios, está entre de 0.3 y 0.5. Se considera 0.4 Г = Generalización de factorial 11 (3.10) Trabajo de Investigación 2020-1 Ciudad Universitaria, CDMX Presentación de Poster – Trabajo escrito fecha de entrega 29/11/19 CAPÍTULO 4 DESARROLLO DE LA INVESTIGACIÓN 4.1. ACTIVIDADES 4.1.1. Descripción de la estructura 4.1.1.1. Geometría Se utilizó el modelo de un edificio real de un hospital de nueve niveles, con seis crujías en dirección longitudinal de 7.20 m y cuatro en dirección transversal de 7.20 m, cuya geometría en planta es regular, como se muestra en la Figura 4.1 a) Planta b) Perspectiva Figura 4.1. Modelo de la estructura 12 4.1.1.2. Materiales - Concreto estructural f’c = 250 kg/cm2 E = 221,359 kg/cm2 - Acero de refuerzo fy = 4200 kg/cm2 E = 2,100,000 kg/cm2 - Acero estructural A992 grado 50, para perfiles tipo W fy = 3500 kg/cm2 (345 MPa) fu = 4570 kg/cm2 (450 MPa) - Acero estructural ASTM A500 grado 46, para tubos HSS fy = 3200 kg/cm2 (320 MPa) fu = 4100 kg/cm2 (405 MPa) - Acero estructural ASTM A36 para diseño de CRPs fy = 2530 kg/cm2 (250 MPa) fu = 4080 kg/cm2 (400 MPa) 4.1.1.3. Cargas La carga muerta se dividió en dos partes, las correspondientes al peso propio de los elementos estructurales que se determinó en función del volumen de dichos elementos y el peso volumétrico del concreto reforzado de 2.4 t/m3, y la carga muerta adicional que se muestra en la Tabla 4.1. Tabla 4.1. Carga muerta adicional Tipo de carga Entrepiso (kg/m2) Cubierta (kg/m2) Relleno para pendiente 0 100 Mortero + enladrillado 0 90 Piso terminado 100 0 Impermeabilizante 0 20 Plafond e instalaciones 40 40 Densidad de muros 120 0 Cancelería 60 0 Sobrecarga 40 40 Total 360 290 13 Trabajo de Investigación 2020-1 Ciudad Universitaria, CDMX Presentación de Poster – Trabajo escrito fecha de entrega 29/11/19 Considerando que el edificio es de uso de hospital, la carga viva correspondiente, tomada de las NTC-CADE (2017), se muestra en la Tabla 4.2 Tabla 4.2. Carga viva Tipo de carga Entrepiso (kg/m2) Cubierta (kg/m2) Carga Viva 250 100 Carga Viva Accidental 180 70 4.1.2. Diseño de la estructura convencional Para el análisis y diseño de la estructura se utilizó el programa ETABS (ETABS, 2018). Para el diseño de la estructura convencional se realizó un análisis sísmico modal espectral de acuerdo con el Manual de Diseño de Obras Civiles de la Comisión Federal de Electricidad (MDOC, 2015). El espectro de diseño modificado, servicio y elástico se presenta en la Figura 4.2. 1,6 1,4 Diseño Modificado 1,2 Servicio Sa 1 0,8 0,6 0,4 0,2 0 0 1 2 3 4 5 Tiempo [s] Figura 4.2. Espectros de pseudo aceleración para diseño sísmico La estructuración del edificio es a base de marcos de acero y contraventeos concéntricos de ductilidad alta (Q = 3). El dimensionamiento de los elementos estructurales se basa en las combinaciones de diseño establecidas por las NTC-DS vigentes. Las propiedades dinámicas de la estructura, calculadas con el ETABS, suponiendo una base rígida se presentan en la Tabla 4.3 Tabla 4.3. Propiedades dinámicas para estructura con diseño convencional Modelo Componente Periodo (s) Frecuencia (Hz) Convencional Longitudinal Transversal Torsión 0.94 0.92 0.57 1.06 1.09 1.76 14 4.1.3. Diseño de aisladores de péndulo de fricción Para el diseño de los aisladores de péndulo de fricción primero se debe determinar el periodo objetivo deseado en la estructura. Para ello, se utilizaron los espectros de respuesta del sismo del 19 de septiembre de 2017 registrado en la estación SAPP (San Alejandro, Puebla), la Figura 4.3 muestra los espectros de pseudo aceleraciones y desplazamientos para dicho registo. 340 Desplazamiento [cm] 1,2 1 SAPP (E-W) Sa 0,8 0,6 SAPP (N-S) 0,4 0,2 290 SAPP (E-W) 240 SAPP (N-S) 190 140 90 40 0 0 1 2 3 4 -10 5 0 1 2 a) 3 4 5 Tiempo [s] Tiempo [s] Espectros de pseudo aceleración b) Espectros de desplazamiento Figura 4.3. Espectros de respuesta en estación SAPP En estas Figura, se observa que, al llevar a la estructura a un periodo mayor de 3 s, el coeficiente sísmico dismuye a aproximadamente a 0.1, mientras que los desplazamientos también disminuyen considerando que el pico de desplazamientos está en estructuras con periodos alrededor de 2.2 s. Una de las ventajas de utilizar los aisladores de base es que el dimensionamiento de los elementos estructurales se basa en cumplir con las resistencias requeridas por cargas gravitacionales y por el 30% de cargas sísmicas de diseño. Considerando que la estructura con base rígida utilizando estas consideraciones tiene un periodo fundamental de 2.38 s, se intenta llevarla a un periodo de 3.5 s. La Tabla 4.4 presenta las propiedades calculadas de los aisladores. Tabla 4.4. Propiedades de los aisladores Registro Aislador µ D (m) Hr (m) keff (tonf/m) SAPP 19/09/17 Péndulo de fricción 0.04 0.30 5.00 121.94 4.1.4. Diseño de los amortiguadores viscosos no lineales Para obtener el amortiguamiento objetivo se generan espectros de desplazamientos con diferentes amortiguamientos y se elige el amortiguamiento que genere un desplazamiento que permita que la estructura se mantenga en el intervalo elástico para evitar daño estructural. Una vez establecido el amortiguamiento objetivo, se utiliza la Ecuación 3.8 iterando el valor del amortiguamiento Cj hasta obtener el amortiguamiento total buscado, para este caso se considera 30% con el fin de tener una distorsión menor a 0.5% tal como lo recomienda VISION 2000 para un nivel de desempeño de ocupación inmediata. 15 Trabajo de Investigación 2020-1 Ciudad Universitaria, CDMX Presentación de Poster – Trabajo escrito fecha de entrega 29/11/19 Partiendo del amortiguador viscoso lineal, C se utiliza para convertirlo en un amortiguador equivalente en el diseño de los amortiguadores no lineales, determinado por la Ecuación 3.9. En la siguiente tabla se resumen los parámetros que se utilizaron para el diseño de los amortiguadores viscosos no lineales. Tabla 4.5. Parametros de los amortiguadores viscosos no lineales Dirección Ci (ton(s/m)) (lineales) ω (rad/s) Xo (m) βα Cα (ton(s/m)) Longitudinal 959.45 2.65 0.020 1.14 2281.17 Transversal 1800.5 2.88 0.022 1.14 4787.59 4.1.5. Diseño de los contraventeos restringidos al pandeo Participación relativa Para el diseño de la estructura con CRPs se buscó que la distorsión máxima fuese menor al 0.5% cuando se excitaba con el registro sísmico SAPP del 19 de septiembre de 2017. Para lograrlo se determinó que con el 30% de participación de la fuerza sísmica en los CRPs se llegaba al objetivo. 120% Primaria 100% Secundaria 80% Total 60% 40% 20% 0% 0 0,2 0,4 0,6 Desplazamiento, m Figura 4.4. Curva de capacidad, comportamiento dual (adaptada de Guerrero, 2016) El punto de fluencia de los CRPs se determinó de manera que fluyeran antes que la estructura primaria, como se muestra en la Figura 4.4. Para esto se realizó la metodología propuesta por Guerrero (2016), en el artículo “A method for preliminary seismic design and assessment of low-rise structures protected with buckling-restrained braces”. En la Tabla 4.6 se muestran las características principales de los CRPs diseñados. Tabla 4.6. Características de los CRPs utilizados Tipo de disipador Dirección Nivel Rigidez (t/m) Carga fluencia (t) fk Área del CRP (cm2) 1 Longitudinal 1-3 22971.38 178.79 1.50 63.78 2 Longitudinal 4-6 15311.13 116.99 1.50 41.73 3 Longitudinal 7-9 7655.56 58.49 1.50 20.87 4 Transversal 1-3 33204.90 253.71 1.50 90.51 5 Transversal 4-6 20740.51 158.48 1.50 56.53 6 Transversal 7-9 12450.05 95.13 1.50 33.94 16 4.1.6. Casos de estudio Se revisaron cuatro casos del comportamiento del edificio: Caso 1) a base de marcos rígidos y contravientos con un diseño convencional, Caso 2) a base de marcos rígidos equipado con aisladores sísmicos, Caso 3) a base de marcos rígidos equipado con amortiguadores viscosos no lineales y Caso 4) a base de marcos rígidos equipado con CRPs, los cuatro casos se muestran en Figura 4.5. a) Caso 1, TL = 0.94 s, TT = 0.92 s b) Caso 2, TL = 3.59 s, TT = 3.47 s a) Caso 3, TL = 2.37 s, TT = 2.18 s b) Caso 1, TL = 1.41 s, TT = 1.30 s Figura 4.5. Casos de estudio en el edificio 17 Trabajo de Investigación 2020-1 Ciudad Universitaria, CDMX Presentación de Poster – Trabajo escrito 4.2. fecha de entrega 29/11/19 RESULTADOS Peso estructura (t) Primeramente, se muestra en la Figura 4.6 el ahorro en material utilizando los sistemas de protección sísmica en comparación con la estructura con diseño convencional. Dicho ahorro representa un 38.75% menos material (acero) para la construcción de la estructura principal. 1328,1 1400,0 1200,0 1000,0 813,4 813,4 813,4 Aisladores AVNL CRP 800,0 600,0 400,0 200,0 0,0 Convencional Figura 4.6. Peso propio de la estructura Se realizó el análisis dinámico paso a paso de la estructura utilizando el registro sísmico del 19 de septiembre de 2017 para la estación SAPP en Puebla. Se graficaron los resultados obtenidos de distorsiones, aceleraciones y cortantes, siendo los máximos de entrepiso en ambas direcciones. Los resultados se muestran en la Figuras 4.7 y 4.8. 9 8 7 Entrepiso 9 Entrepiso Entrepiso 9 8 7 8 7 6 6 6 5 5 5 4 4 4 3 3 3 2 2 2 1 1 1 0 0 0 0,005 0,01 Distorsiones Caso 1 (Convencional) Caso 2 (Aisladores) 0 0 1 2 3 4 5 Aceleraciónes máximas (m/s2) 0 500 1000 1500 2000 2500 Cortante máximo (t) Caso 1 (Convencional) Caso 1 (Convencional) Caso 2 (Aisladores) Caso 2 (Aisladores) Caso 3 (AVNL) Caso 3 (AVNL) Caso 4 (CRP) Caso 4 (CRP) Caso 3 (AVNL) Caso 4 (CRP) Límite Operación Inmediata Figura 4.7. Resultados del análisis de la estructura en dirección transversal 18 8 7 6 Entrepiso 9 Entrepiso Entrepiso 9 8 7 6 5 5 4 4 3 3 2 2 1 1 0 0 0 0,005 0,01 Distorsiones Caso 1 (Convencional) Caso 2 (Aisladores) Caso 3 (AVNL) Caso 4 (CRP) Límite Operación Inmediata 9 8 7 6 5 4 3 2 1 0 1 2 3 4 5 Aceleraciones máximas (m/s2) 0 0 500 1000 1500 2000 2500 Cortante máximo (t) Caso 1 (Convencional) Caso 1 (Convencional) Caso 2 (Aisladores) Caso 2 (Aisladores) Caso 3 ( AVNL) Caso 3 (AVNL) Caso 4 (CRP) Caso 4 (CRP) Figura 4.8. Resultados del análisis de la estructura en dirección longitudinal Se observa que se obtienen resultados muy similares para ambas direcciones. Las distorsiones de entrepiso para el nivel de desempeño de Operación Inmediata se cumplen en todos los casos de estudio, por lo que los elementos no estructurales no presentarán daño en caso de ocurrir un sismo idéntico al de septiembre de 2017. El comportamiento más favorable es el caso de los aisladores de base y los más desfavorables los CRP y los amortiguadores viscosos no lineales (AVNL), la causa de esto es que fueron diseñados para dicha distorsión, en caso de querer un mejor desempeño, se diseña para una menor distorsión. En cuanto a las aceleraciones de entrepiso, los aisladores de péndulo de fricción tienen un excelente comportamiento en todos los niveles de entrepiso; de manera similar, los AVNL controlan las aceleraciones en toda la altura. Para estos casos, se puede asegurar que los contenidos no presentarán volteos o deslizamiento, en cuanto a los CRP y la estructura con diseño convencional, tienden a un tener aumento de aceleraciones en los últimos niveles, por lo que estos dos son los más desfavorables para el control de las aceleraciones. Para los cortantes máximos de entrepiso, nuevamente los aisladores son los de mejor comportamiento, seguido de los CRP y los AVNL, quienes presentan alrededor del 50% de reducción en cortante basal en comparación con la estructura con diseño convencional, la cual presenta mayores descargas a la cimentación. 19 Trabajo de Investigación 2020-1 Ciudad Universitaria, CDMX Presentación de Poster – Trabajo escrito fecha de entrega 29/11/19 CONCLUSIONES Y RECOMENDACIONES Se realizó el análisis dinámico paso a paso de los modelos estructurales con un diseño convencional, con aisladores de péndulo de ficción, con amortiguadores viscosos no lineales y con disipadores histeréticos del tipo contraventeos restringidos al pandeo. Para los modelos equipados son sistemas de protección sísmica se optimizó la superestructura reduciendo secciones de sus elementos. Los resultados permitieron realizar comparaciones entre los cuatro modelos, tales como las distorsiones máximas de entrepiso para la revisión del nivel de desempeño de Operación Inmediata según el documento de SEAOC Vision 2000, también se compararon las aceleraciones máximas de entrepiso, resultado que permite identificar el posible daño de contenidos, y por último el cortante basal. Se obtuvieron las siguientes conclusiones: Los aisladores de péndulo de fricción presentan el mejor desempeño sísmico en la estructura bajo la excitación de sismo del 19 de septiembre de 2017 registrado en la estación SAPP. Los sistemas de protección sísmica permiten una reducción significativa (38%) en material al reducir las secciones de los elementos estructurales. Las demandas para la cimentación en la estructura con diseño convencional son más del doble que aquellas con los sistemas de protección sísmica Todos los casos presentan un buen comportamiento bajo la excitación sísmica de estudio. Se recomienda hacer un análisis no lineal paso a paso con al menos 10 parejas de acelerogramas para comparar los resultados, ya que en este estudio solo se analizó un sismo en particular. 20 REFERENCIAS Y BIBLIOGRAFÍA CFE (2008), “Manual de Diseño de Obras Civiles “Diseño por sismo”. Comisión Federal de Electricidad, Instituto de Investigaciones Eléctricas. ETABS (Versión 18.0.2) [Software]. (2018). Guerrero H., (2018), “Principles of passive supplemental damping and seismic isolation”, Apuntes de clase. Guerrero H., (2016), “Seismic design and performance of hospital structures equipped with bucklingrestrained braces in the lakebed zone of Mexico City”, tesis de doctor en filosofía, Universidad de Manchester, Reino Unido. Guerrero H, Ji T, Teran-Gilmore A, Escobar, J.A., (2016), “A method for preliminary seismic design and assessment of low-rise structures protected with buckling-restrained braces. Engineering Structurres, 123: 141- 154 Marshall J.D. (2015) Buckling-Restrained Braces and Their Implementation in Structural Design of Steel Buildings. In: Beer M., Kougioumtzoglou I., Patelli E., Au IK. (eds) Encyclopedia of Earthquake Engineering. Springer, Berlin, Heidelberg Melgar D., Pérez-Campos X., Ramirez-Guzman L., Spica Z. Hugo Espíndola V., Hammond W. y Cabral-Cano E. (2018). Bend faulting at the Edge of a flat slab: The 2017 mx7.1 puebla-morelos, Mexico earthquake. 1, 2, 11, 14 NTC-DCEC, (2004), “Normas Técnicas Complementarias para Diseño y Construcción de Estructuras de Concreto”, Tomo I, No. 103-Bis. Gaceta Oficial del Distrito Federal, México. NTC-DS, (2004), “Normas Técnicas Complementarias para Diseño por Sismo”, Tomo II, No. 103Bis. Gaceta Oficial del Distrito Federal, México. SEAOC 1995, “Vision 2000, Performance based seismic engineering of buildings”, vols. I and II: Conceptual framework. Sacramento, California, Structural Engineers Association of California, EUA. 21