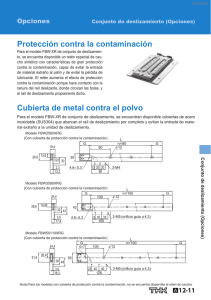
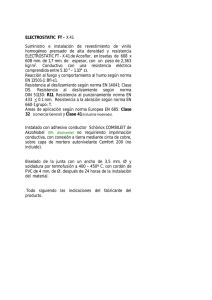
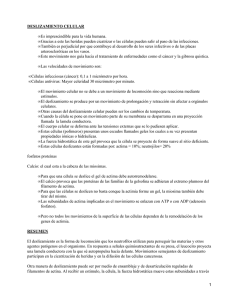
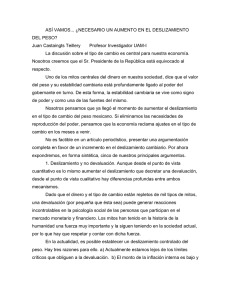
CONTROL EN MODO DESLIZANTE DE LA VELOCIDAD DE UN MOTOR DE INDUCCIÓN Nicole B. Portilla Carlos A. Gonzalez Director: Dr. Carlos Gaviria TEMAS DE SUSTENTACIÓN 1. 2. 3. 4. 5. 6. 7. Introducción Fundamentos de Control de Estructura Variable Diseño de Controladores en Modo Deslizante Diseño del Controlador de Velocidad en Modo Deslizante del Motor de Inducción Resultados de Simulación Conclusiones y Recomendaciones Preguntas INTRODUCCIÓN INTRODUCCIÓN Motor de inducción Métodos escalares y Métodos vectoriales Control no Lineal Control de Estructura Variable: Modo Deslizante FUNDAMENTOS DEL CONTROL DE ESTRUCTURA VARIABLE CONTROL DE ESTRUCTURA VARIABLE Un sistema de estructura variable (VSS) consiste en un conjunto de subsistemas continuos junto con una lógica de conmutación adecuada. Los sistemas en modo deslizante son un tipo especial de estos sistemas CONTROL DE ESTRUCTURA VARIABLE En los sistemas con modo deslizante, el estado de las dinámicas del sistema es atraído hacia una superficie en el espacio de estados conocida como superficie de deslizamiento S(x) superficie de Deslizamiento CONTROL DE ESTRUCTURA VARIABLE 1. ELECCIÓN DE LA SUPERFICIE DE CONMUTACIÓN Puede ser cualquier función del estado X tal que el error de regulación o seguimiento se haga cero en régimen permanente: S ( x ) xi k 0 CONTROL DE ESTRUCTURA VARIABLE 2. ALCANZABILIDAD DE LA SUPERFICIE DE DESLIZAMIENTO CONTROL DE ESTRUCTURA VARIABLE Un sistema de estructura variable se puede definir, en forma general de la siguiente manera: x f ( x, t ) g ( x, t ) CONTROL DE ESTRUCTURA VARIABLE La señal de control (t ) es discontinua y puede tomar los valores o , sus puntos de discontinuidad corresponden con los cambios de estructura del sistema. S ( x ) 0 (t ) Señal de control = = S ( x) 0 CONTROL DE ESTRUCTURA VARIABLE f ( x , t ) y g ( x, t ) son campos vectoriales que pueden ser definidos de la siguiente manera: f a f ( x, t , ) Campos _ Vectoriales f a f ( x, t , ) CONTROL DE ESTRUCTURA VARIABLE Señal del controlador en modo deslizante CONTROL DE ESTRUCTURA VARIABLE Condición de Alcanzabilidad CONTROL DE ESTRUCTURA VARIABLE 3. DINÁMICA DE DESLIZAMIENTO IDEAL (CONDICIÓN DE INVARIANZA) La dinámica del sistema en modo deslizante cuando tiende a cero se conoce como dinámica de deslizamiento ideal. CONTROL DE ESTRUCTURA VARIABLE La dinámica promediada del sistema ó dinámica de deslizamiento ideal, está ligada a la ecuación de la superficie. La dinámica de deslizamiento ideal queda caracterizada por: S ( x) 0 S , f a (t , x, eq ) 0 Llamada condición de invarianza CONTROL DE ESTRUCTURA VARIABLE 4. CONTROL EQUIVALENTE eq El control equivalente ( eq ) es una ley de control que lleva al sistema a deslizarse sobre la superficie en forma ideal, siendo un valor continuo que representa el valor medio del control discontinuo. CONTROL DE ESTRUCTURA VARIABLE Control Equivalente CONTROL DE ESTRUCTURA VARIABLE Siendo f a (t , x, eq ) x f ( x, t ) g ( x, t )eq y teniendo en cuenta que S ( x, t ) depende también del tiempo: eq S S , f ( x) t S , g ( x) Siempre y cuando: S , g ( x) 0 CONTROL DE ESTRUCTURA VARIABLE 5. CONDICIÓN DE TRANSVERSALIDAD S , g ( x) 0 Lo que significa que no puede ser tangente a la superficie de conmutación (esto es, debe ser transverso a la superficie). CONTROL DE ESTRUCTURA VARIABLE 6. REGIONES DE DESLIZAMIENTO. De acuerdo a las condiciones de alcanzabilidad S , f S , f ( x ) g ( x) 0 a S , f a S , f ( x) g ( x) 0 Existe deslizamiento si y solo si: min( , ) eq max( , ) CONTROL DE ESTRUCTURA VARIABLE Se definen y como las regiones del espacio de estados donde puede crearse un modo de deslizamiento. n x : S , f ( x ) g ( x) 0 n x : S , f ( x) g ( x) 0 CONTROL DE ESTRUCTURA VARIABLE Cabe anotar que existirá un régimen de deslizamiento local en S (x), si y solo si: S CONTROL DE ESTRUCTURA VARIABLE 7. PUNTO DE EQUILIBRIO Y ESTABILIDAD ASINTÓTICA Si el régimen de deslizamiento existe, la dinámica de deslizamiento ideal está dada por las condiciones de invarianza: s ( x) 0 fa(t , x, eq ) x(t ) f ( x) eq g ( x) CONTROL DE ESTRUCTURA VARIABLE En régimen permanente, las derivadas las variables de estado son nulas en problema de regulación y x x * es punto de equilibrio del sistema, por tanto: de un un lo s ( x * ) 0 * * * * * * f (t , x , eq ) x (t ) f ( x, t ) eq g ( x, t ) 0 DISEÑO DE CONTROLADORES EN MODO DESLIZANTE PROCEDIMIENTO Selección de la superficie de deslizamiento. Comprobar que exista modo de deslizamiento en torno a la superficie de conmutación (condición de transversalidad). Calculo del control equivalente. PROCEDIMIENTO Determinar que las regiones en la que existe el modo de deslizamiento y el control equivalente estén acotados por los valores discretos de la variable de control. Se obtiene la dinámica de deslizamiento ideal del sistema entorno a la superficie de conmutación (Condición de invarianza) PROCEDIMIENTO Se obtiene el punto de equilibrio de la dinámica de deslizamiento ideal, que deberá ser alcanzado. Comprobación de la estabilidad de la dinámica alrededor del punto de equilibrio. Se deben cumplir cada uno de los puntos mencionados, de lo contrario se debe escoger una nueva superficie de deslizamiento. IMPLEMENTACION DEL CONTROL Diagrama de bloques sistema de control en modo deslizante COMPROBACION ESTABILIDAD GLOBAL ASINTOTICA El procedimiento anterior garantiza estabilidad asintótica al punto de equilibrio deseado. Lo podemos comprobar mediante el teorema de Lyapunov. Podemos concluir que probar la estabilidad asintótica verificando el teorema de Lyapunov es equivalente a examinar las regiones de deslizamiento DISEÑO DEL CONTROL DE VELOCIDAD EN MODO DESLIZANTE DISEÑO DEL CONTROL DE VELOCIDAD EN MODO DESLIZANTE Motor de inducción DISEÑO DEL CONTROL DE VELOCIDAD EN MODO DESLIZANTE Control Vectorial b b d q a a b q a Clarke b d Park c q a 3 fases Estacionarias Cantidades AC c 2 fases Estacionarias Cantidades AC 2 fases Rotantes Cantidades DC DISEÑO DEL CONTROL DE VELOCIDAD EN MODO DESLIZANTE Control Vectorial q q q q is s d r d d a, d DISEÑO DEL CONTROL DE VELOCIDAD EN MODO DESLIZANTE Modelo matemático del motor de inducción diqs dt e ids Rs Rr L2m L L2r L Rs dids L m2Rr 2 dt L L L r qs Lm r Rr Lm iqs dr qr 2 L Lr L L Lr L R L ids eiqs m 2r dr m r qr ds L Lr L Lr L d dr L R m Rr ids r dr sl qr dt Lr Lr d qr dt Lm R Rr iqs sl dr r qr Lr Lr DISEÑO DEL CONTROL DE VELOCIDAD Por otro lado la ecuación mecánica se describe de la siguiente manera: d m J B m TL Te dt La ecuación del torque electromagnético se puede expresar en términos de corriente de estator y flujos de enlace del rotor así: 3 P Lm iqs dr ids qr Te 2 2 Lr DISEÑO DEL CONTROL DE VELOCIDAD Teniendo en cuenta lo anterior, la ecuación de torque electromagnético se puede escribir de la siguiente manera: Te K t i qs Te K t' I a Entonces la ecuación mecánica se puede reescribir de la siguiente manera: J d m B m TL K t iqs dt DISEÑO DEL CONTROL DE VELOCIDAD Considerando la ecuación mecánica incertidumbres tenemos que: m (t ) a a m (t ) b biqs (t ) dTL . con DISEÑO DEL CONTROL DE VELOCIDAD Donde: d 1 J a B J b Kt J Ahora se define el error de velocidad en variables de estado: * x(t ) m (t ) m DISEÑO DEL CONTROL DE VELOCIDAD EN MODO DESLIZANTE Remplazando la derivada de x(t) en la ecuación mecánica con incertidumbres tenemos que: x(t ) ax(t ) be(t ) b i qs f ( x) g ( x) Donde: a b d e(t ) m (t ) iqs T L b b b a iqs iqs (t ) m b SELECCIÓN DE LA SUPERFICIE DE DESLIZAMIENTO t S (t ) h x(t ) a bk x( )d x(0) 0 Donde h debe ser una constante positiva, k es la ganancia lineal de realimentación y x(0) denota las condiciones iniciales del sistema. DISEÑO DEL CONTROL DE VELOCIDAD EN MODO DESLIZANTE Si la trayectoria del sistema dada en la ecuación anterior es atrapada por la región de deslizamiento, entonces las dinámicas equivalentes del sistema están gobernadas por: x(t ) a bK x(t ) . sabemos que : . S (t ) S (t ) 0 DISEÑO CONTROL DE VELOCIDAD Comparando las ecuaciones: x(t ) ax(t ) b i qs e(t ) . x(t ) a bK x(t ) Esto lleva a buscar un control de la forma: i qs Kx(t ) sgn( S (t )) e(t ) 1 S (t ) 0 sgn( S (t )) 1 S ( t ) 0 CONDICION DE TRANSVERSALIDAD Comprobaremos que existe una región de deslizamiento en torno a la superficie de conmutación, verificando se cumpla la siguiente condición. S , g ( x ) 0 CONDICION DE TRANSVERSALIDAD Cálculo de g (x ) : Si la ecuación mecánica del sistema, x(t ) ax(t ) b i e(t ) le agregamos la acción de control, tenemos que: qs . x(t ) (ax(t ) be(t )) (t )b f ( x) (t ) g ( x) Por lo tanto tenemos que: g ( x) b CONDICION DE TRANSVERSALIDAD Calculo de S S x S x t t hx(t ) h a bk x( )d c 0 S x(t ) Resolviendo Tenemos que: S h CONDICION DE TRANSVERSALIDAD Por lo tanto podemos observar que la condición de transversalidad se cumple: S , g ( x) hb Siempre y cuando hb 0 CONTROL EQUIVALENTE x(t ) ax(t ) b i qs e(t ) . eq eq S , f ( x) S , g ( x) x(t ) a bK x(t ) . S t hax(t ) be(t ) h(a bk ) x(t ) bh S ha bk x(t ) t eq kx(t ) e(t ) CONTROL EQUIVALENTE Conclusión: eq es tal que kx(t ) logra error cero de la consigna de velocidad para el modelo sin incertidumbre. El efecto del control en modo deslizante es desplazar el control ideal kx(t ) según la incertidumbre CONTROL EQUIVALENTE REGIONES DE DESLIZAMIENTO Las regiones de deslizamiento están definidas en la ecuación S , f a S , f ( x) g ( x) 0 S , f a S , f ( x) g ( x) 0 Donde: f ( x) ax(t ) be(t ) g ( x) b kx(t ) b kx(t ) b S h REGIONES DE DESLIZAMIENTO Resolviendo tenemos que: b e ( t ) x : x(t ) a bk b e ( t ) x : x(t ) a bk REGIONES DE DESLIZAMIENTO S 0x(t ) Estabilidad global asintótica. CONDICIÓN DE INVARIANZA S ( x ) 0 S , f ( t , x , ) S , f ( x ) g ( x ) 0 a eq eq Donde f ( x) ax(t ) be(t ) g ( x) b eq kx(t ) e(t ) S h Tenemos que: hax(t ) be(t ) bkx(t ) e(t ) 0 DIAGRAMA BLOQUES CONTROLADOR RESULTADOS SIMULACIÓN RESULTADOS DE SIMULACIÓN RESULTADOS DE SIMULACIÓN BLOQUE SLIDING: Está compuesto por 2 subbloques denominados: Superficie de deslizamiento b. Sliding Control a. RESULTADOS DE SIMULACIÓN Bloque Superficie de Deslizamiento t S (t ) h x(t ) a bk x( )d x(0) 0 0 RESULTADOS DE SIMULACIÓN Bloque Sliding Control a * iqs iqs (t ) m b SIMULACIÓN PARÁMETROS NOMINALES DE LA PLANTA PARÁMETROS DE SIMULACIÓN (PLANTA NOMINAL) Fricción Viscosa (B) 5.15 104 N.m s2/rad Momento de Inercia (Jeq) 0.025 kg.m2 Torque de Carga (TL_0), Tiempo = 0 s 20.33 N.m Torque de Carga (TL_0), Tiempo = 0.1 s 10.16 N.m Torque de Carga (TL_0), Tiempo = 0.5 s 20.33 N.m Velocidad Mecánica (Wmech) 185.4 rad/seg RESULTADOS DE SIMULACIÓN Resultados con Control PI Resultados con Control Sliding RESULTADOS DE SIMULACIÓN CON (Jeq Jeq = 0.075 kg.m2 (Variación 300% sobre el nominal) , B Cte) Jeq = 0.075 kg.m2 (Variación 300% sobre el nominal) RESULTADOS DE SIMULACIÓN CON (Jeq Jeq = 0.0063 kg.m2 (Variación 400% por debajo del nominal) , B Cte) Jeq = 0.0063 kg.m2 (Variación 400% por debajo del nominal) RESULTADOS DE SIMULACIÓN CON (Jeq Cte , B B =5.15 x 10-2 N.m s2/rad (Variación 100% sobre el nominal) ) B =5.15 x 10-2 N.m s2/rad (Variación 100% sobre el nominal) RESULTADOS DE SIMULACIÓN CON (Jeq Cte , B B =5.15 x 10-6 N.m s2/rad (Variación 100% por debajo del nominal) ) B =5.15 x 10-6 N.m s2/rad (Variación 100% por debajo del nominal) SIMULACIÓN CONTROLADOR CON ESTIMADOR. i qs (t ) kx(t ) ˆ (t ) sgn( Shb) ˆ 1 a S (t )hb SIMULACIÓN CONTROLADOR CON ESTIMADOR. i qs (t ) kx(t ) ˆ (t ) sgn( Shb) RESULTADOS DE SIMULACIÓN CON CONTROL SLIDING Con estimador Sin estimador CONCLUSIONES El controlador en modo deslizante permite un mejor seguimiento de la señal de referencia ante cambios o perturbaciones que se presentan en comparación con el controlador PI. El control por modos deslizantes se puede aplicar a cualquier sistema dinámico, dadas sus características de robustez y desempeño observadas en las simulaciones CONCLUSIONES La principal ventaja de los sistemas controlados por modos deslizantes es su insensibilidad ante la variación en los parámetros de la planta y ante las perturbaciones externas. Para la implementación de controladores por modos deslizantes debe tenerse muy en cuenta que la frecuencia de conmutación de las funciones discontinuas debe ser alta. CONCLUSIONES El modelo matemático obtenido para el desarrollo de la monografía como también la metodología de simulación que se utilizó para obtener los resultados anteriormente expuestos puede emplearse en la enseñanza de las asignaturas Máquinas Eléctricas y Control de Máquinas Eléctricas que se ofrecen en el programa de Ingeniería Automática Industrial. RECOMENDACIONES Una vez iniciado el camino con este trabajo de grado, se plantea como una etapa siguiente la aplicación de estas técnicas de control sobre otro tipo de sistemas (por ejemplo: Robótica, Control y regulación de sistemas eléctricos de potencia). También seria importante dedicar esfuerzos a la implementación de este tipo de controladores, ya se a en forma analógica ó en forma digital. RECOMENDACIONES Si se desea realizar implementaciones digitales deben utilizarse herramientas que permitan usar frecuencias de muestreo muy altas, comparadas con la dinámica asociada al sistema a controlar. Esto llevará a un mejor desempeño de los controladores implementados. Otro campo de interés que surge es aquel que llama a examinar otras técnicas para la reducción de las oscilaciones de alta frecuencia, causadas por las leyes de control discontinuas. RECOMENDACIONES Este proyecto de tesis, deja sentada las bases y el conocimiento para que un futuro se implemente de una manera práctica el control de velocidad en modo deslizante del motor de inducción que se encuentra en el laboratorio de Máquinas Eléctricas del Departamento de Instrumentación y Control, de la Universidad del Cauca. MUCHAS GRACIAS