")
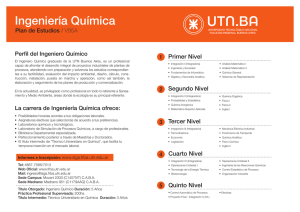
UTN.FRBA Final Mecánica y Mecanismos - Preguntas teóricas 1) Cálculo analítico de la longitud de una correa. Gráficos, formulas, etc. Con la longitud primitiva teórica (L) calculada, se recurre a la tabla de correas del proveedor y se selecciona la más próxima 1 Versión 2014 UTN.FRBA 2) Variación de la tensión a lo largo de la correa en un ciclo de trabajo 2 Versión 2014 UTN.FRBA 3) Ecuación de costo de la correa A tener en cuenta de los posibles materiales de las correas: • Caucho (son de bajo costo y fácil obtención en el mercado, especial para aplicaciones comunes) • Cuero (por su alto costo se utilizan sólo donde las condiciones ambientales no permiten usar las de correas de caucho) • Plástico (para transmisiones de muy alta velocidad con tamaño de transmisiones chicas, son muy caras) 3 Versión 2014 UTN.FRBA 4) Importancia de Tensión inicial en las correas “La principal importancia de la tensión inicial en la correa es que su tensión va a determinar si la correas arrancan a funcionar o no” rodriguez. 5) Perfil de un engranaje y definiciones Circunferencia Primitiva (R): Llamada también circunferencia de paso y corresponde a la homónima circunferencia de contacto de las ruedas de fricción. Circunferencia Exterior (Re): Es denominada también circunferencia de addendum o circunferencia de cabeza. Circunferencia inferior (Ri): Es denominada también circunferencia de raíz o de pie o de deddendum. Ancho de cara: Es la longitud del diente medida axialmente. También se la denomina ancho de faja. Addendum (a): es la distancia radial desde el radio primitivo al radio de cabeza. a = Re – R Deddendum (l): es la distancia radial desde el radio primitivo al radio inferior. 4 Versión 2014 UTN.FRBA l =R – Ri Paso Circular (p): es la distancia entre dos puntos homólogos de dos dientes consecutivos, medidos sobre la circunferencia primitiva o de paso Pc = 2*Pi*R/Z Paso angular (pa): es el ángulo entre dos puntos homólogos de dos dientes consecutivos. Pa = 2*Pi/Z Ancho de espacio (h): es el espacio entre dos dientes consecutivos, medido en la circunferencia de paso. h=p–e Juego (j): es la diferencia entre el huelgo de un diente y el espesor del engranaje junto con aquel. j = h1- e2 Holgura (c): es la diferencia entre el deddendum de un diente y el addendum del que engrana con aquel. c = l2 – a1 Altura de diente (hT): es la distancia radial entre las circunferencias exterior e inferior Ht = a+l Espesor de diente (e): es el espesor medido sobre la circunferencia de paso. Número de dientes (Z): es la cantidad de dientes que tiene el engranaje 6) Línea de Engrane y Angulo de Presión. Dado un engranaje, si consideramos un diente de una de las ruedas en contacto con otro diente de la otra, llamaremos línea de engrane al lugar geométrico de las sucesivas posiciones del punto de contacto de ambos dientes, que como ya se ha dicho, deben ser perfiles conjugados, es decir aquellos perfiles de dientes de engranajes que ostenten “Acción Conjugada”. (“Acción Conjugada” cuando se diseñan para mantener una relación de velocidades angulares constante.) Si no existe rozamiento el empuje de un diente sobre otro es perpendicular a ambos en el punto de contacto P, de modo que tiene la dirección de la recta PI, llamada por esto línea de presión. Esta recta forma con la tangente común a las circunferencias primitivas de las ruedas, un ángulo θ, llamado ángulo de presión (figura 5). Es decir, el empuje de una rueda sobre otra pasa siempre por el centro relativo I, con un ángulo de presión θ. En general el ángulo de presión es variable a lo largo del engrane de un mismo diente. En ruedas dentadas rápidas, esto constituye un inconveniente grave, pues el produce vibraciones y sacudidas en los apoyos. Las únicas dentaduras en las que el ángulo de presión es constante son las de perfil evolvente. 5 Versión 2014 UTN.FRBA 7) Ley de engrane "La relación de transmisión entre dos perfiles se mantendrá constante, siempre y cuando la normal a los perfiles en el punto de contacto pase en todo instante por un punto fijo de la línea de centros." 8) Paso de engranaje- Modulo de engranaje Paso, p: Distancia entre puntos homólogos de dos perfiles consecutivos de una misma rueda, medida sobre la circunferencia primitiva de referencia. Para que dos ruedas engranen deben tener el mismo paso. 6 Versión 2014 UTN.FRBA (“m” : módulo - pd : paso diametral) 9) Perfiles conjugados Acción Conjugada Se dice que los perfiles de los dientes (o levas) poseen “Acción Conjugada” cuando se diseñan para mantener una relación de velocidades angulares constante. Perfiles Conjugados Se denominan así aquellos perfiles de dientes de engranajes que ostenten “Acción Conjugada”. Obtención de perfiles conjugados Punto de Contacto (c): Es aquél donde las superficies en contacto son tangentes entre sí. Línea de acción (ab): Normal común a las superficies en contacto dónde están dirigidas las fuerzas de acción reacción. Punto Primitivo (P): Intersección entre la Línea Acción y la línea de centros (O1O2). Radio Primitivo (O1PO2P): Radios de las Circunferencias Primitivas de 10) Propiedades de los perfiles conjugados a) Si η2 es el perfil conjugado de η1, se verifica la inversa, es decir que η1 es el perfil conjugado de η2. b) Si η2 es el perfil conjugado de η1 , y η3 es el perfil conjugado de η2, entonces η3 y η1 son el mismo perfil. d) La recta normal a dos perfiles conjugados pasa siempre por el punto primitivo P. 7 Versión 2014 UTN.FRBA 11) Características perfil evolvente El perfil de evolvente o una curva de evolvente se puede definir de la siguiente manera. “La Evolvente es una curva tal que el lugar geométrico de los centros de curvatura de todos sus puntos forma una circunferencia” Sus propiedades son: • • • • La línea de engrane es una recta. Las superficies pueden engranar a cualquier distancia de sus centros que no se modifica la relación de velocidad. Son fáciles de generar. Cumplen la ley de engrane 12) Ventajas de engranajes helicoidales sobre engranajes de dientes rectos. Un problema principal que tienen los engranajes con dientes rectos es que comienzan a engranar bruscamente y como los errores dimensionales en la fabricación son inevitables se traducen en pequeños choques y por eso no resultan apropiados para grandes potencias. Para resolver este problema comenzaron a realizarse engranajes cilíndricos escalonados, los cuales poseen las siguientes ventajas: • • • • Los saltos son tan pequeños (infinitesimales) que hay continuidad La marcha es más “suave” (menos ruido y vibraciones) Los dientes helicoidales permiten obtener, una relación de contacto tan grande como se quiera. Los ejes no tienen necesidad de estar alineados (en los rectos sí). 8 Versión 2014 UTN.FRBA 13) Determinar qué mecanismos se utilizan para una fuerza que entra como rotación y sale como una fuerza lineal ENGRANAJE+CREMALLERA Permite convertir un movimiento giratorio en uno lineal continuo, o viceversa. Aunque el sistema es perfectamente reversible, su utilidad práctica suele centrarse solamente en la conversión de giratorio en lineal continuo, siendo muy apreciado para conseguir movimientos lineales de precisión (caso de microscopios u otros instrumentos ópticos como retroproyectores), desplazamiento del cabezal de los taladros sensitivos, movimiento de puertas automáticas de garaje, sacacorchos, regulación de altura de los trípodes, movimiento de estanterías móviles empleadas en archivos, farmacias o bibliotecas, cerraduras.. Quizás la cremallera más conocida sea la que equipan los tornos para el desplazamiento del carro l. 14) Tren de engranaje epicicloidal Es un sistema que permite hacer varias desmultiplicaciones con un solo juego de engranajes, se pueden realizar múltiples cambios en la transmisión de movimiento, es decir, podemos cambiar la forma de giro alterando una de las partes del mecanismo. Está formado por cuatro elementos: planeta, satélites, portasatélites, y corona. Estos engranajes son fundamentales en las transmisiones mecánicas actuales por: - Su robustez - Sus posibilidaes de relaciones de transmisión - No tener elementos mecánicos que se desplacen, evitando roturas - Las multiples posibilidades de sus diferentes combinaciones - Sus medidas, que al ser mínimas, reducen el volumen de los mecanismos Se utiliza de muy diversas maneras: por ejemplo, es el diferencial de casi todos los coches de motor y cambio transversal; también es el engranaje común en las cajas de cambio automáticas con convertidor hidráulico de par. 9 Versión 2014 UTN.FRBA 15) Qué es un mecanismo bi-estable, ejemplificar y dibujar Antes que nada, comenzaremos a definir lo que es un mecanismo. El mismo consiste en un dispositivo que según un esquema establecido transforma un movimiento de entrada en otro de salida. Por lo general s están formados por una cadena cinemática de cuatro o más barras (o cuerpos), donde una de ellas es la que conduce el movimiento por medio de un motor u otro tipo de accionamiento Mecanismos de Bi-estables Estos mecanismos poseen dos posiciones estables, es decir o se encuentran en una configuración o se encuentran en la otra configuración. Suelen ser los mecanismos de pasaje de un estado a otro: encendido-apagado, activo-inactivo, etc. Normalmente poseen resortes para propender a la estabilidad de cualquiera de las dos posibles posiciones de equilibrio. A continuación se muestran algunos casos de mecanismos biestables. Claramente los mecanismos biestables pueden estar formados por mecanismos de barras adecuadamente coplados y eslabonados. 10 Versión 2014 UTN.FRBA 16) Mecanismo de aprisionamiento Estos mecanismos sirven para apretar o sujetar piezas (Figuras 2.7.a 2.7.c), para aplastar o romper (Figura 2.7.b), para obturar (Figura 2.7.d). Nótese que en la Figura 2.7.e se muestra un mecanismo de aprisionamiento formado por cuñas, mientras que en la Figura 2.7.f se muestra un mecanismo de aprisionamiento conducido por una rueda y un conjunto biela manivela 17) Mecanismo de avance y detención, dar un ejemplo. Estos mecanismos permiten avanzar o detener el movimiento de accionamiento. En los casos de las Figuras 2.9.a y 2.9.b son mecanismos que permiten la rotación en un sentido y no en otro sentido; sirviendo también como bloqueo por sobrecarga. En los casos de las Figuras 2.9.c y 2.9.d se aprecian dos formas de detectar la posición para detener un determinado movimiento longitudinal 11 Versión 2014 UTN.FRBA 18) Mecanismo de Indexación Estos mecanismos proveen un movimiento intermitente sea de rotación como de translación. En la Figura 2.8 se muestran algunos ejemplos de mecanismos de indexación por rotación. La Figura 2.8.a muestra el denominado “Mecanismo de Ginebra” que permite un movimiento de rotación intermitente de cuatro pasos. La Figura 2.8.b muestra un mecanismo intermitente con trinquete. La Figura 2.8.c muestra un mecanismo intermitente de rotación accionado con una leva horizontal. La Figura 2.8.d muestra el mecanismo intermitente de un cabezal divisor. En las Figuras 2.8.e y 2.8.f se puede observar un mecanismo intermitente de translación, con accionamiento rotativo. 12 Versión 2014 UTN.FRBA 19) Levas. Despegue de levas. Una leva es un elemento que impulsa, por contacto directo, a otro elemento denominado seguidor de forma que éste último realice un movimiento alternativo concreto. Es un elemento de maquinaria diseñado para generar un movimiento determinado a un seguidor por medio de contacto directo. Las levas también producen movimiento oscilatorio o pueden convertir movimientos de forma a otra. Ejemplo de un mecanismo de leva De cuña Seguidor de rodillo De Disco Seguidor de Cara Plana Uno de los problemas principales de algunos mecanismos leva- seguidor es el problema de despegue del seguidor debido a los efectos dinámicos del movimiento. En muchos casos, el contacto entre la leva y el seguidor se consigue mediante un resorte (o muelle) que presiona el seguidor contra la leva, tal como muestra la figura siguiente. Durante el ascenso el seguidor sufre una primera fase de aceleración y luego otra de deceleración. Debido a su inercia el seguidor tendrá a seguir subiendo al final de la subida (despegándose de la leva) y es el muelle el encargado de oponerse a esta tendencia, asegurando el contacto con la leva. Así, pues, el problema tiene tres variables fundamentales. • Masa del seguidor: cuanto más pesado sea el seguidor, mayor será su inercia y, por tanto, mayor será la tendencia de éste a despegarse al final de la subida. • Rigidez del muelle: cuanto mayor sea la rigidez del muelle, más fuerza ejerce éste sobre el seguidor para que no se separe de la leva, por lo que la tendencia al despegue será menor. • Velocidad de la leva: cuanto mayor sea la velocidad de la leva, la aceleración y deceleración del seguidor durante la subida será también mayor (el seguidor sube en menos tiempo) y, por tanto, la inercia del mismo será mayor, por lo que la tendencia a despegarse también será mayor. En conclusión, para que no haya despegue, cuanto mayor sea la velocidad de operación de la leva, menos masa deberá tener el seguidor y mayor deberá ser la rigidez del muelle. El problema es que, aligerar el seguidor puede tener un efecto negativo en su resistencia, y aumentar la rigidez del muelle implica aumentar mucho las fuerzas de contacto, por lo que el movimiento de la leva sufrirá una irregularidad mayor ya que durante la subida la gran fuerza de contacto se opone al movimiento, pero lo favorece a la bajada. 13 Versión 2014 UTN.FRBA 20) Qué pasa con las válvulas en los motores, que problema tienen y como lo solucionarías. Antes que nada es importante destacar que en el tradicional tipo de distribución con muelles recuperadores, cada válvula es empujada hacia abajo por el árbol de levas y hacia arriba por un resorte. Lo que sucede con este tipo de distribución, es que a determinadas rpm la inercia de los muelles puede impedir a las espiras distenderse con suficiente rapidez, por lo cual las válvulas no consiguen cerrarse a tiempo. Tiene lugar entonces el rebote del empujador contra el árbol de levas, que mientras tanto ha adelantado, lo que conduce a la actuación de fuerzas opuestas motivando vibraciones, debido a la imposibilidad de los muelles de seguir el ritmo del motor. Cuando las válvulas golpean el árbol de levas, todo el sistema de distribución resulta muy ruidoso, la potencia se reduce y los muelles llegan a romperse con frecuencia. Cuando se da esta condición, se dice que la válvula permanece "flotando" y no llega a cerrarse, lo que produce una importante pérdida de rendimiento. La única forma de recuperar el motor de esta condición es bajando su velocidad (bajar las RPM); de no hacerlo, se corre el riesgo de doblar los vástagos de las válvulas o de romperlas al golpear contra los pistones. Para solucionar este problema surge el sistema desmodrómico. Este prevé que el árbol de levas accione ambos movimientos de la válvula, tanto el de apertura como el de cierre. Así, el árbol, al girar, primeramente empuja el vastago de la válvula (apertura) y luego tira de él hacia arriba (cierre). De ese modo resulta superñua la presencia de los muelles, que efectivamente no existen en los motores dotados de dicho sistema de distribución. La ventaja fundamental que ofrece el mando desmodrómico es la de permitir al motor trabajar a elevados regímenes de revolución. El sistema desmodrómico, que permite que el motor alcance regímenes de rotación más altos, ha sido adoptado casi exclusivamente en motores de competición. Su elevado costo de realización, su complejidad mecánica y la dificultad de su puesta a punto han desaconsejado en general su empleo en los coches de turismo corrientes. Otra ventaja de este sistema de distribución es que disminuye el trabajo del motor en la apertura de las válvulas, ya que no tiene que vencer el muelle para abrir la válvula, con lo que en términos reales consigue un aumento de potencia del motor. Soluciones más económicas: resortes de válvulas más duros pueden evitar el flotado y el rebote de válvulas, pero a expensas de aumentar las pérdidas de potencia por fricción, y aumentar la fatiga en todo el sistema de válvulas. Varias técnicas han sido utilizadas para compensar el efecto de resortes más rígidos, como el doble resorte, resorte progresivo, taqués con rodillos y válvulas neumáticas. 14 Versión 2014 UTN.FRBA 21) Diferencial El diferencial es un mecanismo que está compuesto por 4 engranajes cónicos enfrentados 2 horizontalmente y 2 verticalmente. Este mecanismo tiene la función de lograr que las ruedas de tracción de un automóvil puedan girar a diferentes velocidades logrando de esta forma que en una curva la rueda del exterior gire más rápidamente que la interna puesto que tiene que recorrer más trayectoria. El diferencial se encuentra en una caja llena de aceite para lubricar los engranajes Cuando se marcha en línea recta no hay movimiento relativo, pero cuando se entra a una curva, los engranajes de los semiejes giran a diferentes velocidades. 22) Juntas Cardánicas Consiste en una junta mecánica formada por dos horquillas que están unidas entre si por un elemento con forma de cruz donde cada horquilla articula con una de las aspas de la cruz Es un acoplamiento flexible que puede operar con un elevado grado de desalineamiento. El cardan es un componente mecánico que Se usa para conectar dos ejes no alineados cuya relación de velocidades angulares es no constante y es función del ángulo que forman los ejes. Su objetivo es trasmitir el movimiento de rotación de un eje al otro a pesar de ese ángulo Las juntas articuladas poseen una característica particular en la transmisión de un determinado movimiento. Tal característica se llama “no-uniformidad” de la rotación. Esto es, que ante un ángulo de entrada alfa1, el ángulo de salida alfa2 no tendrá el mismo valor que alfa1 a menos que no exista desalineación angular, es decir que beta = 0. 15 Versión 2014 UTN.FRBA Ejemplo de relación de velocidades 16 Versión 2014 UTN.FRBA IMPORTANTE: Ambas partes de la junta tardan lo mismo en girar. Si bien las velocidades angulares durante el giro no son las mismas – varían, son intermitentes-(y tal se ve en el ejemplo), a las dos partes les toma el mismo tiempo dar un giro ya que están unidas. 23) Resonancia en vibraciones forzadas. Que variables se pueden modificar si no se puede alterar la excitación externa. Cálculo de la frecuencia natural. La resonancia es un fenómeno que se produce cuando un cuerpo capaz de vibrar es sometido a la acción de una fuerza periódica, cuyo periodo de vibración se acerca al periodo de vibración característico de dicho cuerpo, en el cual, una fuerza relativamente pequeña aplicada en forma repetida hace que una amplitud de un sistema oscilante se haga muy grande. En estas circunstancias el cuerpo vibra, aumentando de forma progresiva la amplitud del movimiento tras cada una de las actuaciones sucesivas de la fuerza. Este efecto puede ser destructivo en algunos materiales rígidos Variación de la amplitud en relación al tiempo En la práctica, existen un gran número de situaciones en las que es posible reducir, pero no eliminar las fuerzas de carácter dinámico (variables en el tiempo) que excitan nuestro sistema mecánico dando lugar a la aparición de un problema de vibraciones. En este sentido, existen diferentes métodos o formas de plantear el control de las vibraciones; entre todos ellos cabe destacar: • El conocimiento y control de las frecuencias naturales del sistema de cara a evitar la presencia de resonancias bajo la acción de excitaciones externas. Tal y como se deduce de la definición vista para un sistema de un grado de libertad (1 gdl), la frecuencia natural de un sistema ω= k m puede cambiarse variando tanto la masa (m) como la rigidez (k) del mismo • La introducción de amortiguamiento o de cualquier tipo de mecanismo disipador de energía de cara a prevenir una respuesta del sistema excesiva (vibraciones de gran amplitud), incluso en el caso de que se produzca una resonancia. 17 Versión 2014 UTN.FRBA • El uso de elementos aislantes de vibraciones que reduzcan la transmisión de las fuerzas de excitación o de las propias vibraciones entre las diferentes partes que constituyen nuestro sistema. • La incorporación de absorbedores dinámicos de vibraciones o masas auxiliares neutralizadoras de vibraciones, llamados también amortiguadores dinámicos, con el objetivo de reducir la respuesta del sistema. Análisis analítico Vibraciones forzadas Sea un sistema físico lineal que no varía con el tiempo, con una excitación externa de carácter senoidal ó pulsante. La respuesta en régimen permanente será senoidal y tendrá la misma frecuencia que la entrada. En caso de que sea modificada la frecuencia de montaje, luego de extinguirse el período transitorio, se tendrá nuevamente que la frecuencia de salida coincide con la de entrada. Pero se observa que la amplitud y el ángulo de fase habrán cambiado respecto al régimen permanente anterior. Se dice que estas oscilaciones son forzadas porque el sistema se ve excitado por una fuerza externa de características oscilantes, la que llevará a oscilar al sistema por más que se haya extinguido su oscilación natural. Esto no dejará de ocurrir a no ser que desaparezca la perturbación ó el montaje. La solución viene dada por la suma de la respuesta natural y la respuesta forzada que nos lleva a la amplitud máxima en régimen permanente. Z=ω/ω0 es el factor de amplificación o relación entre la frecuencia de perturbación y la propia del sistema. η=β/βc es el factor de amortiguación, y relaciona el amortiguamiento utilizado, y el coeficiente de amortiguación crítico. βc=2mω0 es el coeficiente de amortiguación crítico y es característico del sistema, debido a que depende de la masa y la frecuencia natural ((ω0)2=k/m) Por lo que cuando n = 0 esto quiere decir que no tiene amortiguación y por lo tanto la frecuencia w se hace igual a wo lo que hace que z tienda a 1 y por lo tanto Xm tiende al infinito y ante este esto nos encontramos con el fenómeno de resonancia. Esto se debe evitar para que el sistema no colapse. 18 Versión 2014 UTN.FRBA En la ecuación anterior, podemos observar que si no existe amortiguación (β=0, o lo que es lo mismo η=0), y la frecuencia de perturbación (ω) se iguala con la frecuencia propia del sistema (ω0), podemos observar que Z tiene a 1 y en consecuencia XM tiende a infinito. En este caso estamos ante el fenómeno de RESONANCIA (decimos que el sistema entra en RESONANCIA). Esta situación que debe ser evitada a los efectos de evitar el colapso del sistema. Para ello, dentro de las características constructivas, se modifican los factores que se señalaron y que no afecten el funcionamiento del sistema (ω y β que son factores de “montaje”; ó ω0 y β0 que son “característicos del sistema” a través de k y m) 19 Versión 2014