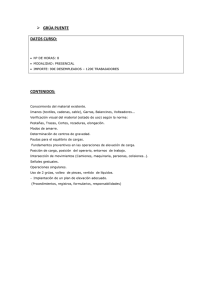
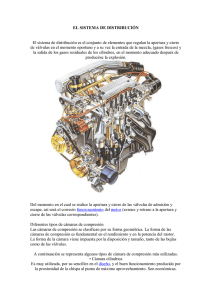
ING. VÍCTOR CRUZ MARTÍNEZ DOCENTE: ALUMNO: SEMESTRE: CÁRDENAS GALEANA ALAN YERAY 6 GRUPO: B TEMA: 1 VIBRACIONES MECÁNICAS ASIGNATURA: INGENIERÍA MECATRÓNICA FECHA: 31/01/2020 Grados de libertad: Por grado de libertad se entiende el número de entradas independientes requeridas para determinar la posición de todos los eslabones del mecanismo respecto a tierra en cualquier instante. En muchos casos resulta posible conocer la movilidad de un mecanismo a partir del número de eslabones y la cantidad y tipo de los pares que los enlazan. El criterio de Grübler para mecanismos planos establece que la Movilidad Está Dada Por Donde: G= grados de libertad N= número de miembros del mecanismo PI= número de pares binarios de un grado de libertad PII= número de pares binarios de dos grados de libertad Movimiento de cuerpos: Podemos decir que movimiento es todo cambio de posición a medida que transcurre el tiempo. El movimiento es relativo, y puede ser sobre un eje (una dimensión), sobre un plano (dos dimensiones) o en el espacio (tres dimensiones). Elementos del movimiento: La trayectoria. Es la línea que describe un cuerpo en movimiento. Atendiendo a su trayectoria los movimientos, puede ser: Rectilíneos: describen una línea recta. Curvilíneos: Circular: describe una circunferencia Elíptico: describe una elipse. Parabólico: describe una parábola. Móvil: Es todo cuerpo o partícula en movimiento. Trayectoria: Línea que distinguen todas las posiciones de un móvil durante su movimiento. Espacio recorrido: Longitud de la trayectoria. Desplazamiento: definición final de un móvil desde su punto de origen. En la física, el movimiento es descrito mediante dos conjuntos de leyes mecánicas aparentemente contradictorias entre sí. El movimiento de objetos de gran escala y objetos familiares en el universo (tales como ING. VÍCTOR CRUZ MARTÍNEZ DOCENTE: ALUMNO: SEMESTRE: ASIGNATURA: CÁRDENAS GALEANA ALAN YERAY 6 GRUPO: B TEMA: 1 VIBRACIONES MECÁNICAS INGENIERÍA MECATRÓNICA FECHA: 31/01/2020 proyectiles, planetas, células y humanos) son descritos por la mecánica clásica. Mientras que el movimiento de cualquier pequeño átomo y sub-átomo son descritos por la mecánica cuántica. Primera ley: En un marco de referencia inercial, un objeto, ya sea que se mantiene en reposo, o continúa moviéndose a una velocidad constante, a menos que actúe sobre él una fuerza neta. Segunda ley: En un marco de referencia inercial, la suma vectorial de fuerzas “F” en un objeto es igual a la masa “m” de ese objeto multiplicado por la aceleración “a” del objeto. Tercera ley: Cuando un cuerpo ejerce fuerza en un segundo cuerpo, el segundo cuerpo simultáneamente ejercerá una fuerza de igual magnitud en el sentido contrario al primer cuerpo. Características del movimiento: • Posición. - Este es el lugar en el que se encuentra un objeto, y se sabe que existe movimiento cuando cambia de lugar de un punto a otro. • Trayectoria. - Esta es una línea imaginaria que corresponde al desplazamiento de un cuerpo, se encuentra regido por principios geométricos. • Distancia. - Este es el espacio recorrido por el cuerpo en movimiento, variando por la fuerza y dirección. • Velocidad. - Podemos definir a la velocidad como la medida que explica la rapidez en que se desplaza un objeto. • Aceleración. - Este término es aplicado en física, para expresar la elevación o disminución de velocidad, cambios en la rapidez o cambios en la desaceleración. • Fuerza. - Este es un fenómeno que, por la investigación de Newton, se ha definido como Newton su medida, expresándose con la letra (N), y corresponde a la magnitud que mide la intensidad del movimiento en su intercambio lineal, esto es que es capaz de alterar la cantidad de movimiento en los cuerpos. • Energía. - La energía es la fuerza directa que se encuentra reservada en los objetos para realizar un trabajo, la energía se puede destacar por no ser un material tangible. Par cinemático: Sistema de unión entre sólidos rígidos que permite ciertos movimientos relativos y restringe otros. Existen muchos tipos distintos de pares cinemáticos, en función de qué movimientos restringen y cuales permiten. Es habitual clasificarlos en dos grandes grupos: • Pares cinemáticos inferiores: aquellos que establecen una unión entre los eslabones a través de una superficie ING. VÍCTOR CRUZ MARTÍNEZ DOCENTE: ALUMNO: SEMESTRE: • ASIGNATURA: CÁRDENAS GALEANA ALAN YERAY 6 GRUPO: B TEMA: 1 FECHA: VIBRACIONES MECÁNICAS INGENIERÍA MECATRÓNICA 31/01/2020 Pares cinemáticos superiores: aquellos que establecen una unión entre los eslabones a través de un contacto teórico según una arista o un punto La figura siguiente muestra algunos pares cinemáticos de tipo inferior: a) Par de revolución b) Par prismático c) Par helicoidal o de tornillo d) Par cilíndrico e) Par esférico f) Par plano Balancín: ING. VÍCTOR CRUZ MARTÍNEZ DOCENTE: ALUMNO: SEMESTRE: CÁRDENAS GALEANA ALAN YERAY 6 GRUPO: B TEMA: 1 VIBRACIONES MECÁNICAS ASIGNATURA: FECHA: INGENIERÍA MECATRÓNICA 31/01/2020 El balancín tiene como función empujar las válvulas de admisión y escape para que se abran en el momento adecuado, facilitando la sincronización de los tiempos en un motor de combustión interna. El balancín, a su vez, es accionado empujador movido por el árbol de levas. En resumen, son palancas que transmiten el movimiento de las levas a las válvulas. Tipos de balancines: En unos casos el eje de giro de los balancines puede estar en su centro, y en otros puede estar en un extremo de la palanca. En el primer caso se denominan balancines basculantes y en el segundo balancines oscilantes. • El tipo de balancín basculante es el normalmente utilizado cuando el árbol de levas se sitúa en el bloque del motor. • El tipo de balancines oscilantes o semibalancines se emplean cuando el árbol de levas se sitúa en la culata de los cilindros. El eje de balancines que suele ser hueco y cerrado en sus extremos, lleva una serie de orificios que coinciden con los cojinetes o rodamientos de los balancines, por los que sale el aceite de lubricación. Cuando el árbol de levas está sobre la culata de los cilindros no se necesitan empujadores ni taqués. En este caso el movimiento del árbol de levas se transmite a las válvulas directamente o por medio de palancas (lengüetas). Para que la válvula se cierre bien, entre el extremo de su vástago y el reverso de la leva o del balancín debe haber cierta holgura. Al disminuir la temperatura del motor esta holgura varía de formas diferentes y depende de la disposición mutua de válvulas y los árboles de levas, de los materiales, así como de la estructura de las válvulas y de las piezas ligadas a ellas. Si las válvulas son laterales el juego, con el motor frío, es mayor que durante el funcionamiento del motor, ya que la válvula se dilata más que el bloque de cilindros. Cuando las válvulas están en cabeza y el árbol de levas en el cárter, el juego con el motor frío es menor que con él en caliente. Esto se explica porque el alargamiento (dilatación) del vástago de la válvula, cuando existe palanca (balancín), no puede compensar la dilatación de la culata de los cilindros. Fuente: https://www.studocu.com/es-mx/document/instituto-tecnologico-de-tijuana/analisis-y-sintesis-demecanismos/apuntes/grados-de-libertad/2847699/view