(3$&(3$&
9HUVLRQ9( 9
1XPHULFDO'LVWDQFH5HOD\
&RPPLVVLRQLQJ
DQG0DLQWHQDQFH*XLGH
060&
EPAC 3100
EPAC 3500
Numerical Distance Relay with Integrated
Automatic and Control Equipment
Commissioning and Maintenance Guide
TRIP
ALARM
RELAY AVAILABLE
SET
TERMINAL 1
Help
TERMINAL 2
03/99
MS/M 1.6882-C
P-2
EPAC 3100/3500
MS/M 1.6882-C
BLANK PAGE
P-3
MS/M 1.6882-C
EPAC 3100/3500
PREFACE
Dear reader,
We are continuously endeavouring to improve the quality of our brochures. This form has been
designed to enable you to send in your remarks and comments. Please return the form, duly filled
in, to the following address. Thank you in advance.
-----------------------------------------------------------------------------Address:
ALSTOM P & C
HV Product Line
Marketing Department
Avenue de Figuières
F-34975 LATTES CEDEX
Have you found any errors in the brochure ? If so, please indicate where they are.
Did you find the brochure comprehensible and well set out ?
Please indicate here any proposals for improvement.
Have we supplied you with sufficient information to permit the understanding of the product
presented here ?
If not, what is missing and at what points should we supply additional indications ?
Name:
Position:
Date:
Utility or company:
Address:
Telephone:
Post/Zip Code:
City:
Country:
Concerning the item:
P-4
EPAC 3100/3500
MS/M 1.6882-C
BLANK PAGE
P-5
MS/M 1.6882-C
EPAC 3100/3500
INTRODUCTION
The documentation covering the EPAC 3100/3500 Distance Protection is subdivided into 3
documents. Each document provides its recipient with the information needed for the performance of his or her tasks. The following table summarises the titles of the documents, their
recipients and the supply date.
Document Title
Recipient
Supply date
Installer’s Guide
Installer of the equipment
Delivered with each
equipment
User's Guide
Expert in-charge
of the equipment
On order
Commissioning and
Maintenance Guide
Agent specialising
in commissioning the equipment
and in preventive maintenance
On order
P-6
EPAC 3100/3500
First issue: 11/97
MS/M 1.6882
Indice
MS/M 1.6882-C
REASON FOR UP-DATES
COMMISSIONING AND MAINTENANCE GUIDE
Updating
date
Updating subject
11/97
EPAC 3100/3500 version 5 in "L" case
A
05/98
EPAC 3100/3500 version 5-E
B
09/98
Text corrections
C
03/99
EPAC 3100/3500 version V6
EPAC 3100/3500
P-7
MS/M 1.6882-C
EPAC 3100/3500
First issue: 11/97
STATE OF UP-DATES
EPAC 3100/3500
COMMISSIONING AND MAINTENANCE GUIDE
Index
Updating
date
No.
A
B
C
D
E
F
G
H
I
J
K
L
M
N
05/98
09/98
03/99
AMENDED
PAGE INDEX
PRELIMINARY PAGES
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
TEXT AND
P-1
P-2
P-3
P-4
P-5
P-6
P-7
P-8
P-9
P-10
P-11
P-12
P-13
P-14
P-15
P-16
B
C
C
B
C
C
C
B
C
B
C
B
C
B
C
B
C
B
C
B
C
B
C
B
C
B
C
B
C
DRAWING PAGES
CHAP 1
1-1
1-2
1-3
1-4
1-5
1-6
1-7
1-8
1-9
1-10
1-11
1-12
A
A
A
A
A
A
A
A
A
A
A
A
B
A
A
A
A
A
B
B
B
B
B
B
B
B
B
CHAP 2
2-1
2-2
2-3
2-4
2-5
B
B
B
C
C
MS/M 1.6882
No.
2-6
2-7
2-8
2-9
2-10
2-11
2-12
2-13
2-14
2-15
2-16
2-17
2-18
2-19
2-20
2-21
2-22
2-23
2-24
2-25
2-26
2-27
2-28
2-29
2-30
2-31
2-32
2-33
2-34
2-35
2-36
2-37
2-38
2-39
2-40
2-41
2-42
AMENDED
PAGE INDEX
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
C
P-8
EPAC 3100/3500
MS/M 1.6882-C
First issue: 11/97
STATE OF UP-DATES
EPAC 3100/3500
COMMISSIONING AND MAINTENANCE GUIDE
Index
Updating
date
No.
A
B
C
D
E
F
G
H
I
J
K
L
M
N
05/98
2-43
2-44
2-45
2-46
2-47
2-48
2-49
2-50
2-51
2-52
2-53
2-54
2-55
2-56
2-57
2-58
2-59
2-60
2-61
2-62
2-63
2-64
2-65
2-66
2-67
2-68
2-69
2-70
2-71
2-72
2-73
2-74
2-75
2-76
2-77
2-78
2-79
09/98
03/99
AMENDED
PAGE INDEX
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
MS/M 1.6882
No.
2-80
2-81
2-82
2-83
2-84
2-85
2-86
2-87
2-88
2-89
2-90
2-91
2-92
2-93
2-94
2-95
2-96
2-97
2-98
2-99
2-100
2-101
2-102
2-103
2-104
2-105
2-106
2-107
2-108
2-109
2-110
2-111
2-112
2-113
2-114
AMENDED
PAGE INDEX
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
CHAP 3
3-1
A
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
P-9
MS/M 1.6882-C
EPAC 3100/3500
First issue: 11/97
STATE OF UP-DATES
EPAC 3100/3500
COMMISSIONING AND MAINTENANCE GUIDE
Index
Updating
date
No.
A
B
C
D
E
F
G
H
I
J
K
L
M
N
05/98
3-2
3-3
3-4
3-5
3-6
3-7
3-8
3-9
3-10
3-11
3-12
3-13
3-14
09/98
03/99
AMENDED
PAGE INDEX
A
A
A
A
A
A
A
A
A
A
A
A
A
B
B
B
B
B
B
B
B
B
CHAP 4
4-1
4-2
4-3
4-4
4-5
4-6
4-7
4-8
4-9
4-10
4-11
4-12
4-13
4-14
4-15
4-16
4-17
4-18
4-19
4-20
4-21
4-22
4-23
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
B
B
B
B
B
B
B
B
MS/M 1.6882
No.
4-24
4-25
4-26
AMENDED
PAGE INDEX
A
A
A
B
B
CHAP 5
5-1
5-2
5-3
5-4
5-5
5-6
5-7
5-8
5-9
5-10
5-11
5-12
5-13
5-14
5-15
5-16
5-17
5-18
5-19
5-20
5-21
5-22
5-23
5-24
5-25
5-26
5-27
5-28
5-29
5-30
5-31
5-32
5-33
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
B
B
B
B
B
B
B
B
B
B
P-10
EPAC 3100/3500
MS/M 1.6882-C
First issue: 11/97
STATE OF UP-DATES
EPAC 3100/3500
COMMISSIONING AND MAINTENANCE GUIDE
Index
Updating
date
No.
A
B
C
D
E
F
G
H
I
J
K
L
M
N
05/98
5-34
5-35
5-36
5-37
5-38
5-39
5-40
5-41
5-42
5-43
5-44
5-45
5-46
5-47
5-48
5-49
5-50
5-51
5-52
5-53
5-54
5-55
5-56
5-57
5-58
5-59
5-60
5-61
5-62
5-63
5-64
5-65
5-66
5-67
5-68
5-69
5-70
09/98
03/99
AMENDED
PAGE INDEX
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
C
C
MS/M 1.6882
No.
5-71
5-72
5-73
5-74
5-75
5-76
5-77
5-78
5-79
5-80
5-81
5-82
5-83
5-84
5-85
5-86
5-87
5-88
5-89
5-90
5-91
5-92
5-93
5-94
5-95
5-96
5-97
5-98
AMENDED
PAGE INDEX
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
CHAP 6
B
B
B
B
6-1
6-2
6-3
6-4
6-5
6-6
6-7
6-8
A
A
A
A
A
A
A
A
B
B
B
B
P-11
MS/M 1.6882-C
EPAC 3100/3500
First issue: 11/97
STATE OF UP-DATES
EPAC 3100/3500
COMMISSIONING AND MAINTENANCE GUIDE
Index
Updating
date
No.
A
B
C
D
E
F
G
H
I
J
K
L
M
N
05/98
6-9
6-10
6-11
6-12
6-13
6-14
6-15
6-16
6-17
6-18
6-19
6-20
6-21
6-22
6-23
6-24
6-25
6-26
6-27
6-28
09/98
03/99
AMENDED
PAGE INDEX
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
B
B
B
B
C
APPEND A
A-1
A-2
A-3
A-4
A-5
A-6
A-7
A-8
A-9
A-10
A-11
A-12
A-13
A-14
A-15
A-16
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
B
B
C
C
C
C
C
C
B
MS/M 1.6882
No.
A-17
A-18
A-19
A-20
A-21
A-22
A-23
A-24
A-25
A-26
A-27
A-28
A-29
A-30
A-31
A-32
A-33
A-34
A-35
A-36
A-37
A-38
A-39
A-40
A-41
A-42
A-43
A-44
A-45
A-46
A-47
A-48
A-49
A-50
A-51
A-52
A-53
AMENDED
PAGE INDEX
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
C
C
P-12
EPAC 3100/3500
MS/M 1.6882-C
First issue: 11/97
STATE OF UP-DATES
EPAC 3100/3500
COMMISSIONING AND MAINTENANCE GUIDE
Index
No.
A
B
C
D
E
F
G
H
I
J
K
L
M
N
Updating
date
05/98
09/98
03/99
A-54
A-55
A-56
A-57
A-58
A-60
A-61
A-62
A-63
A-64
A-65
A-66
A-67
A-68
A-69
A-70
A-71
A-72
A-73
A-74
A-75
A-76
A-77
A-78
A-79
AMENDED
PAGE INDEX
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
APPEND B
B-1
B-2
B-3
B-4
B-5
B-6
B-7
B-8
B-9
B-10
B-11
C
C
C
C
C
C
C
C
C
C
C
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
No.
B-12
B-13
B-14
B-15
B-16
MS/M 1.6882
AMENDED
PAGE INDEX
C
C
C
C
C
P-13
MS/M 1.6882-C
EPAC 3100/3500
CONTENTS
1.
1.1.
1.2.
1.3.
1.3.1.
1.3.2.
1.3.3.
1.3.4.
1.3.5.
1.4.
1.4.1.
1.4.2.
1.5.
INTRODUCTION ______________________________________________________________ 1-1
PRESENTATION OF THE GUIDE _________________________________________________ 1-3
SCOPE OF APPLICATION ______________________________________________________ 1-3
FUNCTIONS _________________________________________________________________ 1-4
Network Protection ___________________________________________________________ 1-5
Management of the Configuration Parameter Groups ______________________________ 1-5
Fault Analysis ________________________________________________________________ 1-5
User Interfaces _______________________________________________________________ 1-6
Communication with External Systems ___________________________________________ 1-7
EXTERNAL CONFIGURATION ___________________________________________________ 1-8
Front Panel __________________________________________________________________ 1-8
Rear Panel __________________________________________________________________ 1-9
INTERNAL CONFIGURATION __________________________________________________ 1-10
2.
2.1.
2.2.
2.2.1.
2.2.2.
2.3.
2.3.1.
2.3.2.
2.3.3.
2.3.4.
2.3.5.
2.3.6.
2.3.7.
2.3.8.
2.3.9.
2.3.10.
2.4.
METHOD OF OPERATION ______________________________________________________ 2-1
EPAC GENERAL OPERATION ___________________________________________________ 2-4
ACQUIRING AND PRE-PROCESSING THE ELECTRIC VALUES _________________________ 2-4
Acquisition __________________________________________________________________ 2-4
Pre-processing _______________________________________________________________ 2-5
STANDARD DISTANCE PROTECTION _____________________________________________ 2-6
Detecting the Fault, Selecting the phase and Defining the Directional _________________ 2-6
Zone Definition _____________________________________________________________ 2-16
Algorithm chaining __________________________________________________________ 2-21
Tripping Logic _______________________________________________________________ 2-21
Tripping Logic with Teleprotection ______________________________________________ 2-22
Tripping logic in zone reach control mode _______________________________________ 2-30
Overcurrent Start-Up _________________________________________________________ 2-32
Functions Associated with Distance Protection ____________________________________ 2-36
Input-Output Logic Functions __________________________________________________ 2-49
Input-Output Logic Functions __________________________________________________ 2-50
DISTANCE PROTECTION FOR NETWORKS WITH INSULATED OR IMPEDANT NEUTRAL
(RNI OPTION) _______________________________________________________________ 2-56
Fault Analysis by the RNI Module ______________________________________________ 2-57
Phase Selection by the RNI Module _____________________________________________ 2-58
Sensitive Directional Earth Fault Protection on Insulated or Impedant Neutral Networks 2-62
Associated Inputs/Outputs ____________________________________________________ 2-67
COMPLEMENTARY PROTECTION DEVICES _______________________________________ 2-68
DEF Protection Against High Resistance Earth Faults (Optional) _____________________ 2-68
Overload, Undervoltage, Overvoltage Protection Devices __________________________ 2-77
AUTO-RECLOSER FUNCTION AND SYNCHRO-CHECK FUNCTION ___________________ 2-81
Recloser____________________________________________________________________ 2-81
Synchro-check ______________________________________________________________ 2-86
Combined auto-recloser/synchro-check operation ________________________________ 2-88
Specific Auto Recloser Operations ______________________________________________ 2-89
Pole Discrepancy ____________________________________________________________ 2-92
Circuit breaker Opening Fault _________________________________________________ 2-92
Inputs/Outputs associated with the Recloser _____________________________________ 2-93
Inputs/Outputs associated with Synchro-check ___________________________________ 2-93
Logic Functions for Auto-Recloser and Synchro-Check Operation ____________________ 2-94
FAULT ANALYSIS ____________________________________________________________ 2-96
Fault Reports _______________________________________________________________ 2-96
2.4.1.
2.4.2.
2.4.3.
2.4.4.
2.5.
2.5.1.
2.5.2.
2.6.
2.6.1.
2.6.2.
2.6.3.
2.6.4.
2.6.5.
2.6.6.
2.6.7.
2.6.8.
2.6.9.
2.7.
2.7.1.
P-14
EPAC 3100/3500
MS/M 1.6882-C
2.7.2.
2.7.3.
2.7.4.
2.8.
2.9.
2.9.1.
2.9.2.
2.9.3.
2.9.4.
2.10.
2.11.
2.11.1.
2.11.2.
2.11.3.
Disturbance recording Module (optional) ________________________________________ 2-97
Fault Locator (optional) _______________________________________________________ 2-99
Local Printing of Fault Reports ________________________________________________ 2-100
VIEWING POLLING DATA ____________________________________________________ 2-102
USER INTERFACES __________________________________________________________ 2-103
Monitoring Indicator Lights ___________________________________________________ 2-103
WinEPAC Software Installed on a Micro-Computer _______________________________ 2-105
Front Panel Display Unit _____________________________________________________ 2-107
Protection Access Software & Toolkit software (communication by COURIER) _________ 2-108
MANAGEMENT OF SETTING GROUPS _________________________________________ 2-109
COMMUNICATION WITH EXTERNAL SYSTEMS __________________________________ 2-110
Exchanging Fault Data ______________________________________________________ 2-110
Interface with a Control System _______________________________________________ 2-111
Synchronisation with an External Time Signal ___________________________________ 2-113
3.
3.1.
3.1.1.
3.1.2.
3.2.
3.2.1.
3.2.2.
HARDWARE AND SOFTWARE DESCRIPTION ______________________________________ 3-1
HARDWARE DESCRIPTION _____________________________________________________ 3-3
Data Flow ___________________________________________________________________ 3-3
Board Functions ______________________________________________________________ 3-5
SOFTWARE DESCRIPTION _____________________________________________________ 3-11
Sequencing Software Tasks ___________________________________________________ 3-11
EPAC Self-Tests ______________________________________________________________ 3-11
4.
TOOLS FOR COMMISSIONING AND MAINTENANCE
OPERATIONS ________________________________________________________________ 4-1
HARDWARE TOOLS ___________________________________________________________ 4-4
SOFTWARE TOOLS ___________________________________________________________ 4-5
WinEPAC Software ___________________________________________________________ 4-5
The EPAC Software on the Display _____________________________________________ 4-17
Accessing the EPAC from the Protection Access Software & Toolkit software (PAS & T) __ 4-23
4.1.
4.2.
4.2.1.
4.2.2.
4.2.3.
5.
5.1.
5.1.1.
5.1.2.
5.1.3.
5.2.
5.3.
5.4.
5.4.1.
5.4.2.
COMMISSIONING ____________________________________________________________ 5-1
PRELIMINARY CHECKS ________________________________________________________ 5-4
Mechanical Checks ___________________________________________________________ 5-4
Checking the Nominal Values __________________________________________________ 5-5
Checking Connections _________________________________________________________ 5-6
ENERGIZATION _____________________________________________________________ 5-10
CHECKING THE STATUS OF THE EPAC 3100/3500 ________________________________ 5-10
EPAC CONFIGURATION ______________________________________________________ 5-11
Configuration Management ___________________________________________________ 5-11
Changing the Password ______________________________________________________ 5-12
Selecting a configuration (Setting Group) ________________________________________ 5-14
Transferring a configuration to the EPAC ________________________________________ 5-16
Changing configurations _____________________________________________________ 5-18
Saving and printing a configuration ____________________________________________ 5-20
Preparing a configuration ____________________________________________________ 5-21
Changing the communication parameters _______________________________________ 5-24
Changing the basic configuration parameters ____________________________________ 5-28
Configuring the Functions of the EPAC __________________________________________ 5-30
Changing the line parameters _________________________________________________ 5-32
Changing the teleaction parameters ____________________________________________ 5-35
Changing the Zone Setting Parameters _________________________________________ 5-38
Changing the teleaction parameters for a tee line ________________________________ 5-42
Changing the Weak Infeed Parameters _________________________________________ 5-45
P-15
MS/M 1.6882-C
EPAC 3100/3500
5.5.
5.6.
5.6.1.
5.6.2.
Changing the Miscellaneous Parameters ________________________________________ 5-47
Changing the fuse failure parameters __________________________________________ 5-49
Configuring the software functions _____________________________________________ 5-51
Changing the Power Swing Parameters _________________________________________ 5-53
Changing the High Resistance Earth Fault Parameters _____________________________ 5-56
Changing the Parameters of the Automatic Recloser Control _______________________ 5-59
Changing the Synchrocheck Parameters ________________________________________ 5-62
Changing the Parameters of isolated or compensated network (RNI) protection _______ 5-65
Changing the parameters of Sensitive Directional Earth Fault
protection __________________________________________________________________ 5-67
Changing the MaxI, MaxU and MinU Protection Parameters _______________________ 5-70
Changing the disturbance recording parameters _________________________________ 5-73
Assigning the digital Inputs/Outputs ___________________________________________ 5-76
Checking Configuration Consistency ____________________________________________ 5-80
CHECKING THE RESULTS OF THE ANALOGUE VALUES ____________________________ 5-82
CHECKING THE PROTECTION AND AUTOMATIC CONTROL FUNCTIONS _____________ 5-84
Fault Analysis Tools __________________________________________________________ 5-84
Functional Tests _____________________________________________________________ 5-88
6.
6.1.
6.1.1.
6.1.2.
6.2.
6.2.1.
6.2.2.
6.2.3.
6.2.4.
6.2.5.
6.3.
6.3.1.
6.3.2.
6.3.3.
6.3.4.
6.3.5.
6.3.6.
6.3.7.
6.3.8.
MAINTENANCE ______________________________________________________________ 6-1
ANALYSING THE RESULTS OF THE SELF-TESTS _____________________________________ 6-4
Maintenance Lights __________________________________________________________ 6-4
Maintenance Dialogue ________________________________________________________ 6-6
COMPLEMENTARY TESTS TO THE SELF-TEST ______________________________________ 6-14
Fast Check _________________________________________________________________ 6-14
Checking the Connections _____________________________________________________ 6-14
Tests for Checking the Active Operation of the Inputs and Outputs __________________ 6-15
Checking the Contacts of the Logic Inputs _______________________________________ 6-15
Checking the Tripping Contacts and the Signalling Contacts ________________________ 6-16
REPAIRING THE BOARDS _____________________________________________________ 6-18
Repairing the Converter Board ________________________________________________ 6-19
Repairing the TMS Board _____________________________________________________ 6-21
Repairing the QTF Board _____________________________________________________ 6-22
Repairing the main IO-1 or IO-3 Board _________________________________________ 6-24
Repairing the additional IO-1 or IO-3 or IO-2 Board ______________________________ 6-25
Repairing the AC Board ______________________________________________________ 6-26
Repairing one of the daughter boards of the AC Board ____________________________ 6-27
Repairing the IRIG-B board ___________________________________________________ 6-28
5.4.3.
APPENDIX A ________________________________________________________________________ A-1
TECHNICAL CHARACTERISTICS _________________________________________________________ A-3
MONITORING PARAMETERS OF THE PROTECTION FUNCTION ______________________________ A-4
COMMISSIONING REPORT ___________________________________________________________ A-10
TYPES OF BOARD FAULT _____________________________________________________________ A-28
ANALOGUE INPUT CONNECTIONS ____________________________________________________ A-31
INPUT/OUTPUT CONTACT CONNECTIONS ______________________________________________ A-33
CURVES ___________________________________________________________________________ A-40
OUT LINE __________________________________________________________________________ A-47
DIGITAL INPUTS/OUTPUTS____________________________________________________________ A-49
EPAC COURIER MESSAGES ___________________________________________________________ A-52
DISPLAY FUNCTIONS ________________________________________________________________ A-65
CONNECTIONS TO A PC OR A PRINTER ________________________________________________ A-73
EPAC FUNCTIONS / MODELS _________________________________________________________ A-76
DIGITAL OUTPUTS ALLOCATION _______________________________________________________ A-77
P-16
EPAC 3100/3500
MS/M 1.6882-C
APPENDIX B - SOFTWARE VERSION V6 __________________________________________________ B-1
B1
NEW FUNCTIONS ____________________________________________________________ B-4
B2
EVOLUTIONS OF EXITING FUNCTIONS __________________________________________ B-7
B3
OTHER MODIFICATIONS ______________________________________________________ B-12
B4
WIN EPAC VERSION V6 ______________________________________________________ B-16
MS/M 1.6882-B
EPAC 3100/3500
CHAPTER 1
INTRODUCTION
EPAC 3100/3500
MS/M 1.6882-B
BLANK PAGE
1-1
MS/M 1.6882-C
EPAC 3100/3500
CONTENTS
PAGE
1.1.
PRESENTATION OF THE GUIDE _________________________________________________ 1-3
1.2.
SCOPE OF APPLICATION ______________________________________________________ 1-3
1.3.
1.3.1.
1.3.2.
1.3.3.
1.3.4.
1.3.5.
FUNCTIONS _________________________________________________________________
Network Protection ___________________________________________________________
Management of the Configuration Parameter Groups ______________________________
Fault Analysis ________________________________________________________________
User Interfaces _______________________________________________________________
Communication with External Systems ___________________________________________
1.4.
1.4.1.
1.4.2.
EXTERNAL CONFIGURATION ___________________________________________________ 1-8
Front Panel __________________________________________________________________ 1-8
Rear Panel __________________________________________________________________ 1-9
1.5.
INTERNAL CONFIGURATION __________________________________________________ 1-10
1-4
1-5
1-5
1-5
1-6
1-7
1-2
EPAC 3100/3500
MS/M 1.6882-C
BLANK PAGE
1-3
MS/M 1.6882-C
1.1.
EPAC 3100/3500
PRESENTATION OF THE GUIDE
This guide gives a detailed description of the EPAC protection equipment designed by GEC
ALSTHOM T&D P&C to provide protection for power networks.The bulk of the text relates to
version V5-E. The evolution and modifications applicable to EPAC version V6 are covered in
appendix B.
Chapter 1 defines the scope of application and the functions of the EPAC protection unit.
Chapter 2 describes the basic and optional functions ensured by the EPAC. The following
modules are also described in chapter 2:
-
network protection module,
-
fault analysis module,
-
user interface module,
-
communication module.
Chapter 3 describes the hardware and software architecture of the EPAC.
Chapter 4 describes the user interfaces, particularly the WinEPAC software and the front display
unit software.
Chapter 5 describes the commissioning and setting of the EPAC.
Chapter 6 describes the EPAC maintenance tools and procedures.
Appendix A contains technical data, operating times, IDMT curves and other relevant
information.
Appendix B provides information on the evolutions added to EPAC version V6 as compared with
version V5-E described in the other chapters of this guide.
1.2.
SCOPE OF APPLICATION
The EPAC is a numerical and full-scheme relay. It is designed to provide selective and rapid
protection of the distribution, subtransmission and transmission networks. It processes any type
of electric fault that could occur on the lines and the cables of such networks. Because of its
modular design, it is particularly adapted to all the characteristics of the network to be protected.
The EPAC can be used as a stand-alone distance protection or as part of a teleaction scheme.
It incorporates two standard teleprotection modes:
-
directional protection mode, particularly suited to the protection of short distance lines. It
defines the zone resistances for four forward and one reverse zone,
-
busbar isolation mode, particularly suited to protection against busbar faults. It allows the
busbars requiring protection to be quickly and selectively isolated if a fault occurs.
The EPAC may be used on insulated neutral or Petersen coil-earthed power networks. The EPAC
is particularly suited to the transmission networks for the following reasons:
-
its operates at high speed, which is an essential requirement on a transmission network,
-
it is able to perform single-phase tripping in the event of a phase-to-earth fault.
1-4
EPAC 3100/3500
MS/M 1.6882-C
The EPAC may also be integrated with power distribution networks for the following reasons:
-
it incorporates teleprotection functions adapted to branch lines,
-
it has a particularly good tolerance to high harmonic contents, which are frequent on this type
of network.
The EPAC can protect non-homogeneous lines (underground cable + overhead line).
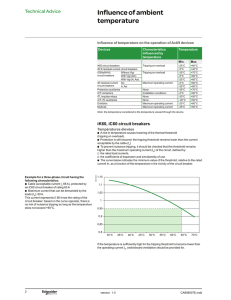
1.3.
FUNCTIONS
Zero sequence
compensation
Bar
voltages
Fault locator
Distance
protection
Currents
Circuit breaker
monitoring
Distance
protection for
isolated or
compensated
network
Auto Recloser
Protection against
resistant earth fault
Synchrocheck
MaxI, MaxU,
MinU Protection
Disturbance
recorder
Measurements
Fault
Reports
Voltages
User
dialogue
on PC
User dialogue
on display
unit
WinEPAC
MMI
EPAC display
unit MMI
Control System
via KBUS or VDEW
Time
synchronisation
Figure 1.3a: Functions of the EPAC
Communication
management
Management of
disturbance recording
data (TPE, VDEW or
COURIER format)
1-5
MS/M 1.6882-C
1.3.1.
EPAC 3100/3500
Network Protection
The main function of the EPAC equipment is to provide distance protection. This protection is
set as directional or not, depending on the part of the network to be protected. The
complementary protection modules may be added to this basic protection according to the
characteristics of the network to which the EPAC is connected:
1.3.2.
-
a power swing processing module which allows the selective locking of the protection when
a power oscillation or a synchronism loss occurs,
-
a phase-to-earth fault processing module which is used if the neutral is insulated or earthed
via an impedance or a "Petersen coil",
-
an earth fault processing module particularly suited to high resistance faults,
-
a protection module against overloads, undervoltages and overvoltages,
-
a circuit-breaker automatic reclosing module. This module may be completed with a
synchroniser check facility for delayed reclosing application,
-
a module for managing line and busbar fuse failures.
Management of the Configuration Parameter Groups
The EPAC contains in memory a specific configuration for parameterising its different functions.
In order to improve the flexibility of use, a complementary element is available which, allows
the integration of several parameter groups. It allows up to four setting groups to be stored in
memory. At any one moment, only one of these groups is active.
The activation of another setting group is controlled as follows:
1.3.3.
-
either from one of the user interfaces,
-
or from two wired inputs,
-
or from a central control computer via one of the VDEW or COURIER communication
protocols.
Fault Analysis
The EPAC provides, in the standard configuration, the information allowing the analysis of a fault
which has just been processed:
-
the nominal value of the currents, voltages and frequency of the fault detected by the EPAC,
-
a calculation of the distance to the fault is provided by the measurement algorithm,
-
faulty phase(s), phase(s) tripped, and the zone of the fault.
This basic information can be supplemented by integrating the two following elements:
-
a disturbance recording element used for recording the evolution of the following values
while a fault occurs:
. the 8 analogue values measured continuously by the EPAC,
. the logic values configured in order to be recorded (for instance, the type of tripping
caused by the fault),
1-6
EPAC 3100/3500
-
MS/M 1.6882-C
a fault locator element (present in all the standard models of EPAC) which can determine
accurately the distance to a fault.
A printer can be connected to the EPAC to print fault reports automatically.
1.3.4.
User Interfaces
1.3.4.1. Front Panel Indicator Lights
The EPAC 3100/3500 incorporates on its front panel two groups of indicator lights which
provide the following information:
-
the detection of a minor or major alarm, ( " ALARM " )
-
the tripping of the associated circuit breaker, ( "TRIP " )
-
the EPAC 3100/3500 operation. ( " RELAY AVAILABLE " )
1.3.4.2. WinEPAC software
The EPAC is provided, in the standard configuration, with a software called WinEPAC. This
software is the main man-machine interface of the product and it is designed to operate on a
personal computer fitted with MSWindows*. It is used for the following functions:
-
to configure the operation of the various elements which may be integrated into the EPAC,
-
to assign inputs/outputs of the various elements to the contacts on the input/output board(s),
-
to facilitate repairs by using the maintenance dialogue as a guide to direct trouble shooting,
-
to consult the fault characteristics recorded by the EPAC,
-
to configure some of the functions of the WinEPAC software, (presentation language, unit of
the fault distance, communication port, etc.),
-
to consult certain information relative to the user’s EPAC (hardware and software functions
installed on the EPAC, language used to display fault recording information and display unit
messages, computer and the name by default, etc.),
-
to monitor and consult the status of digital and analogue values on EPAC terminals.
*
!
WinEPAC does not run in the Windows NT (32 bits) environment.
1.3.4.3. Protection Access Software & Toolkit Software (PAS&T)
This software is supplied with the K-bus COURIER option. It runs under DOS on a micro-computer
and communicates with the EPAC via a KITZ protocol converter. It requires no particular microcomputer configuration and is used:
-
to configure the operation of the various modules which may be integrated into the EPAC,
-
to assign inputs/outputs of the various modules to the contacts on the input/output board(s),
-
to consult the fault characteristics recorded by the EPAC,
-
to consult or modify certain information relative to the user’s EPAC (hardware and software
functions installed),
1-7
MS/M 1.6882-C
EPAC 3100/3500
-
to upload fault recording events in COMTRADE format (if the option is available),
-
to monitor and consult the status of digital and anologue values at the EPAC terminals,
-
to log (on screen, file or printer) I/O changes and commands carried out from the EPAC.
1.3.4.4. Front Panel Display Unit
There is a display unit on the EPAC 3100/3500 front panel. It provides exactly the same
functions as are available with the WinEPAC software. The unit consists of:
-
a two line display,
-
six function keys.
Online help is available to facilitate its use.
1.3.5.
Communication with External Systems
Communication with external systems is managed by the AC board.
The board is able to manage several links and protocols through its daughter-boards (available
as options):
-
KBUS: allows K-bus COURIER supervision from a master control centre, ( cf § 1.3.4.3 )
-
VDEW: used for communication via its own protocol, CEI 870-5, between peripherals and
the master control computer,
-
Current Loop: to utilise TPE 2000 type fault recording data,
-
Modem: to upload disturbance recorders events, ( compatible to all modems type HAYES)
-
IRIG-B: used for time synchronisation.
The KBUS and VDEW boards are mutually exclusive, as
are the Current Loop and Modem boards.
Only K-bus COURIER- and TPE-format disturbance recording allow event data to be exploited locally via the EPAC
front panel, using the WinTPE software.
If either of these boards are integrated into the EPAC 3100/3500, communication with the
following items can be managed:
-
a digital control system,
-
an external time synchronisation system,
-
a system designed for the direct management, locally or remotely, of fault recording data.
1-8
EPAC 3100/3500
1.4.
MS/M 1.6882-C
EXTERNAL CONFIGURATION
The EPAC 3100/3500 protection unit is frame mounted or cabinet mounted. Its dimensions
depend on the EPAC version.
EPAC 3100 dimensions: (flush mounting)
-
Width
412.50 mm
-
Height
177 mm
-
Depth
304.30 mm
EPAC 3500 dimensions: (rack mounting)
-
Width
483 mm
-
Height
177 mm
-
Depth
304.30 mm
The unit weights less than 12 kg for both versions.
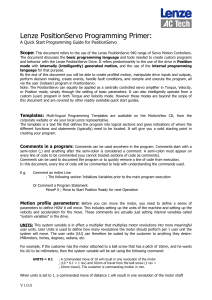
1.4.1.
Front Panel
It incorporates a serigraphied cover. The cover is latched by a tightening nut on the right part
of the rack cover.
EPAC 3100
Serial port for
WinEPAC PC
Serial port for:
- WinV24
- or a local printer
EPAC 3500
Serial port for
WinEPAC PC
Serial port for:
- WinV24
- or a local printer
Figure 1.4a: EPAC 3100 and 3500 Front Panels
1-9
MS/M 1.6882-C
1.4.2.
EPAC 3100/3500
Front panel component
Function
Maintenance LEDs
indicate equipment status. During normal operation, the
LED "RELAY AVAILABLE" should flash and the LED "ALARM"
should be off.
Indication LED
The LED "TRIP" lights up when the protection trips.
TERMINAL 1 connector
allows connection of a micro-computer to the EPAC in
order to access the functions of the WinEPAC operator
dialogue.
Display unit
allows access to the functions of the EPAC operator
dialogue.
TERMINAL 2 connector
used for:
- the disturbance recording in the local mode with
WinTPE software,
- printing automatically fault reports.
Rear Panel
The rack panel of all models incorporates:
-
a ground connection point,
-
an X6 connector for the power supply,
-
two connectors, X1 and X2, incorporating the following:
. the tripping outputs,
. the signalling contacts,
. the digital inputs,
-
the X5 connector for connection of the analogue inputs,
-
two connectors, X3 and X4, for the additional inputs/outputs in option (including tripping
contacts).
Two ports are located on the rear of the EPAC for use with communication devices (VDEW,
current loop to TPE restitution unit, time synchronisation, etc.)
1-10
EPAC 3100/3500
MS/M 1.6882-C
X6
1
2
X1
X3
27
1
27
1
28
2
28
2
27
1
27
1
28
2
28
2
X5
27
28
27
1
X6
28
2
D24
X1
X3
X2
X4
X2
X4
X5
X30
D26
D25
X18
VDEW and
current loop option
X20
KBUS-COURIER
and modem
option
X30 BNC connection
for IRIG-B time
synchronisation
signal
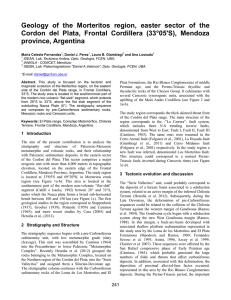
Figure 1.4b: EPAC rear panel
If the daughter-boards of the AC board are the VDEW and current loop boards, the connectors
have the following functions:
-
D24 VDEW receiver,
-
D25 VDEW transmitter,
-
X18 Current loop.
If the daughter-boards of the AC board are the KBUS and MODEM boards, the connectors have
the following functions:
1.5.
-
X20 MODEM link,
-
D26 KBUS link.
INTERNAL CONFIGURATION
The EPAC 3100/3500 is based on a modular architecture. The following items are included
in this architecture:
-
basic boards, ensuring standard functions and a number of functions which do not need
additional boards,
-
additional boards, if required, ensuring functions which cannot be performed by the
standard architecture.
1-11
MS/M 1.6882-C
EPAC 3100/3500
Standard board:
Function:
QTF
receives the analogue input transformers.
TMS
analogue-to-digital conversion of the inputs. This board
also receives the processor which provides the basic
functions of the EPAC and the other functions which do not
need additional boards.
IO-1 or IO-3
Actuates the following:
-
3 tripping contacts, (6 tripping contacts for IO-3)
-
1 closing contact,
-
16 signalling contacts, (13 signaling contacts for IO-3)
-
8 logic inputs,
-
1 fault device contact.
Power supply converter
Equipment power supply 48, 60, 110, 125, 220 and 250
Vdc.
Additional board:
Function:
IO-2 or IO-1 or IO-3
The additional IO-1 or IO-3 boards actuate the same type
of contacts as the first IO-1 or IO-3 boards. The IO-2 board
actuates the following:
-
3 tripping contacts,
-
1 closing contact,
-
16 signalling contacts,
-
1 fault device contact.
AC and daughter-boards
Management of the following:
-
a serial link with a micro-computer for the local processing of the TPE or COURIER fault recording,
-
4 types of fault recording links including:
optical (IEC 870-5VDEW), current loop (TPE Protocol),
DB9 for Modem Link to the disturbance recorder,
RS485-type (KBUS),
-
an interface board with:
. an external synchronization signal (IRIGB board),
. a control system network (KBUS or VDEW board).
1-12
EPAC 3100/3500
MS/M 1.6882-C
BLANK PAGE
MS/M 1.6882-B
EPAC 3100/3500
CHAPTER 2
METHOD OF
OPERATION
EPAC 3100/3500
MS/M 1.6882-B
BLANK PAGE
2-1
EPAC 3100/3500
MS/M 1.6882-C
CONTENTS
PAGE
2.1.
EPAC GENERAL OPERATION ___________________________________________________ 2-4
2.2.
2.2.1.
2.2.2.
ACQUIRING AND PRE-PROCESSING THE ELECTRIC VALUES _________________________ 2-4
Acquisition __________________________________________________________________ 2-4
Pre-processing _______________________________________________________________ 2-5
2.3.
2.3.1.
2.3.2.
2.3.3.
2.3.4.
2.3.5.
2.3.6.
2.3.7.
2.3.8.
2.3.9.
2.3.10.
STANDARD DISTANCE PROTECTION _____________________________________________ 2-6
Detecting the Fault, Selecting the phase and Defining the Directional _________________ 2-6
Zone Definition _____________________________________________________________ 2-16
Algorithm chaining __________________________________________________________ 2-21
Tripping Logic _______________________________________________________________ 2-22
Tripping Logic with Teleprotection ______________________________________________ 2-22
Tripping logic in zone reach control mode _______________________________________ 2-30
Overcurrent Start-Up _________________________________________________________ 2-32
Functions Associated with Distance Protection ____________________________________ 2-36
Associated Inputs/Outputs ____________________________________________________ 2-49
Input-Output Logic Functions __________________________________________________ 2-50
2.4.
2.4.1.
2.4.2.
2.4.3.
2.4.4.
DISTANCE PROTECTION FOR NETWORKS WITH INSULATED OR IMPEDANT NEUTRAL
(RNI OPTION) _______________________________________________________________ 2-56
Fault Analysis by the RNI Module ______________________________________________ 2-57
Phase Selection by the RNI Module _____________________________________________ 2-58
Sensitive Directional Earth Fault Protection on Insulated or Impedant Neutral Networks 2-62
Associated Inputs/Outputs ____________________________________________________ 2-67
2.5.
2.5.1.
2.5.2.
COMPLEMENTARY PROTECTION DEVICES _______________________________________ 2-68
DEF Protection Against High Resistance Earth Faults ______________________________ 2-68
Overload, Undervoltage, Overvoltage Protection Devices __________________________ 2-77
2.6.
2.6.1.
2.6.2.
2.6.3.
2.6.4.
2.6.5.
2.6.6.
2.6.7.
2.6.8.
2.6.9.
AUTO-RECLOSER FUNCTION AND SYNCHRO-CHECK FUNCTION ___________________ 2-81
Recloser____________________________________________________________________ 2-81
Synchro-check ______________________________________________________________ 2-86
Combined auto-recloser/synchro-check operation ________________________________ 2-88
Specific Auto Recloser Operations ______________________________________________ 2-89
Pole Discrepancy ____________________________________________________________ 2-92
Circuit breaker Opening Fault _________________________________________________ 2-92
Inputs/Outputs associated with the Recloser _____________________________________ 2-93
Inputs/Outputs associated with Synchro-check ___________________________________ 2-93
Logic Functions for Auto-Recloser and Synchro-Check Operation ____________________ 2-94
2.7.
2.7.1.
2.7.2.
2.7.3.
2.7.4.
FAULT ANALYSIS ____________________________________________________________ 2-96
Fault Reports _______________________________________________________________ 2-96
Disturbance recording element (optional) ________________________________________ 2-97
Fault Locator ________________________________________________________________ 2-99
Local Printing of Fault Reports ________________________________________________ 2-100
2-2
EPAC 3100/3500
MS/M 1.6882-C
2.8.
VIEWING POLLING DATA ____________________________________________________ 2-102
2.9.
2.9.1.
2.9.2.
2.9.3.
2.9.4.
USER INTERFACES __________________________________________________________ 2-103
Monitoring Indicator Lights ___________________________________________________ 2-103
WinEPAC Software Installed on a Micro-Computer _______________________________ 2-105
Front Panel Display Unit _____________________________________________________ 2-107
Protection Access Software & Toolkit software (communication by COURIER) _________ 2-108
2.10.
MANAGEMENT OF SETTING GROUPS _________________________________________ 2-109
2.11.
2.11.1.
2.11.2.
2.11.3.
COMMUNICATION WITH EXTERNAL SYSTEMS __________________________________ 2-110
Exchanging Fault Data ______________________________________________________ 2-110
Interface with a Control System _______________________________________________ 2-111
Synchronisation with an External Time Signal ___________________________________ 2-113
2-3
EPAC 3100/3500
MS/M 1.6882-C
This chapter describes the operation of all the elements which may be integrated into the EPAC
3100/3500:
-
the standard distance protection,
-
the distance protection for insulated or impedant neutral network (RNI option),
-
the complementary protection functions:
. DEF protection against highly resistant earth faults,
. protection against overloads, overvoltages and undervoltages,
-
the recloser and its associated check synchronising function,
-
the fault analysis tools:
. the basic information provided by the EPAC,
. the fault locator,
. the disturbance recorder (optional),
-
the user dialogue interfaces:
. the Protection Access Software & Toolkit software,
. the WinEPAC software,
. the display unit located on the front panel of the EPAC,
-
the communication interfaces with external systems:
. interface with a control system, via KBUS-COURIER or VDEW,
. synchronisation interface on an external time signal,
. fault recording data exchange interface,
-
multiple setting groups.
Inputs/outputs may be assigned to contacts on the EPAC input/output board(s) by operator
dialogue.
The optional functions incorporated in the EPAC depend
on the model selected by the user.
2-4
EPAC 3100/3500
2.1.
MS/M 1.6882-C
EPAC GENERAL OPERATION
In the electrical network, the EPAC is designed to protect the section to which it is connected.
It detects and then analyses the faults and trips one or more phase(s) of the breaker, if required.
Its first task is to acquire the voltages and currents provided through the transformers which
supply the protection. These signals are pre-processed so that only the characteristic signals are
retained and the interference is eliminated.
The filtered signals are then analysed by the various protection elements to detect any fault
indication. When a fault is detected, specific algorithms analyse it to determine its characteristics
and command circuit breaker tripping, if required.
2.2.
ACQUIRING AND PRE-PROCESSING THE ELECTRIC VALUES
The EPAC is a numerical protection relay which may operate from a global model of the line.
Therefore, the analogue values recorded are digitalised and the signals are filtered in order to
suppress the noises and the transient values which are not modelled.
< Analogue >< 24 samples/period >< 12 samples/period >
x1
I
B
x 16
SAMPLING AND
ANALOGUE-TODIGITAL
CONVERSION
24 SAMPLES
PER PERIOD
U
B
LOW-PASS
FILTER
LOW-PASS
FILTER
SUB-SAMPLE
1/2
If
FIR
DERIVATOR
SUB-SAMPLE
1/2
I'f
ONE-SAMPLE
DELAY
SUB-SAMPLE
1/2
Uf
ONE-SAMPLE
DELAY
FIR : finite impulse response filter
Figure 2.2a: Signal Acquisition and Pre-Processing
2.2.1.
Acquisition
The EPAC is designed for the acquisition of the following data:
-
the three phase voltages and the three phase currents,
-
the zero-sequence current,
-
the busbar voltage,
-
the image voltage of the residual currents on the parallel lines, used by the fault locator
function.
These 9 analogue inputs are filtered through low-pass filters with a cut-off frequency of 166 Hz.
These filters ensure an anti-return function (suppression of the high frequencies which cannot be
sampled correctly).
In order to improve the dynamic range, the current inputs are processed over two scales, one
with a gain of x1 and the other with x16.
2-5
MS/M 1.6882-C
EPAC 3100/3500
These inputs are multiplexed and sampled at a rate equal to 24 times the network frequency;
this frequency is measured in the shaping function. The utility of this interlock will become obvious
in the description of the algorithm of calculation of the superimposed values. The time lags
between the sampling instants are compensated for by the software.
The analogue-to-digital conversion is performed by a 12-bit converter, which provides the
following:
2.2.2.
-
voltages expressed on 11 bits + 1 sign bit,
-
currents expressed on 15 bits + 1 sign bit.
Pre-processing
Pre-processing consists of shaping and filtering the recorded electric values.
2.2.2.1. Shaping the Signals
Shaping consists of the following:
-
correcting the drift of filters and analogue amplifiers,
-
selecting the scale for each current input sample. The sample from the x1 channel is used only
if the sample from scale x16 generates a saturation,
-
measuring the network frequency. This is measured on Va voltage channel by measuring the
time between two zero transition.
2.2.2.2. Filtering the Signals
Filtering is performed in order to:
-
suppress the noise frequencies,
-
calculate the current derivatives that are used by the algorithms.
Signals are first filtered by filters operating at a rate of 24 samples per period and then by filters
operating at 12 samples per period.
The following filters operate at a rate of 24 samples per period:
-
a low-pass filter applied to all channels,
-
a high-pass filter applied to all channels in order to eliminate the DC components of the
current,
-
a band-pass FIR derivator applied to all currents (phase to earth, phase to phase, residual).
The lag of this filter is applied to the other channels.
The following filters operate at a rate of 12 samples per period:
-
negative-sequence voltage and current filter,
-
fundamental and second harmonic filter applied to currents.
2-6
EPAC 3100/3500
2.3.
MS/M 1.6882-C
STANDARD DISTANCE PROTECTION
Distance protection is the main function of the EPAC. This equipment item should detect and
eliminate as rapidly and selectively as possible the faults occurring on the network.
Two protection modes can be used, depending on the part of the substation to be protected:
-
directional distance protection mode for overhead lines, underground lines and transformers,
-
busbar isolation mode for busbar protection.
When a fault is detected, the distance protection operates as follows:
-
it selects the faulty phase(s),
-
it determines the direction of the fault (for directional mode),
-
it initiates the tripping of the faulty phase(s), if necessary, in coordination or not with a
protection at the other end of the line.
The operation is based on the combined use of two types of algorithms:
-
"High-speed" algorithms using only the superimposed values that are characteristic of a fault,
-
"Conventional" algorithms using the values measured while the fault occurred, as used by
the conventional distance relays.
Both the above algorithms always run in parallel continuously.
The "High-Speed" algorithms have priority over the "Conventional" algorithms due to their faster
fault detection. However, "High-speed" algorithms are activated only for 40 ms since system
superimposed (transcient) values are predominant only during first few cycles.
2.3.1.
Detecting the Fault, Selecting the phase and Defining the Directional
2.3.1.1. "High-Speed" Algorithms
These algorithms are used for the following functions:
-
detection of the fault by comparing the superimposed values to a threshold which is low
enough to be crossed when a fault occurs,
-
establishing the direction of the fault. Only the fault can generate superimposed values, so
it is possible to determine its direction by measuring the transit direction of the superimposed
energy,
-
phase selection. As the superimposed values do not include the load currents, it is possible
to make an efficient phase selection.
2-7
EPAC 3100/3500
MS/M 1.6882-C
Fault Modelling
Let us consider a stable network status, i.e. a network in a status which can be assumed as a
steady-state operating status. When a fault occurs, a new status is established. If there is no other
modification, the differences between the two states (before and after the fault) are caused by
the fault. If both states are included in the same linear domain, the superimposing principle may
be used: the state after the fault is equivalent to the sum of the values of the state before the fault
and the values characteristic of the fault. The fault acts as a source for the latter and the generators
as passive impedances in this case.
EPAC
A
IA
F
B
UA
Rdef
Network with fault
EPAC
A
IAav
UAav
F
B
UFav
Network prior to fault
EPAC
A
IA
B
- UFav
UA
Rdef
Fault conditions
UA = UA - UAav
IA = IA - IAav
Figure 2.3a: Electric Fault Values
In order to use the modelling application, the following requirements are necessary:
-
the conditions before and after the fault conserve linearity characteristics:
. no saturation or clipping of the measured values,
. no saturation of current and voltage transformers,
2-8
EPAC 3100/3500
-
MS/M 1.6882-C
the only modifications that occur are caused by the fault:
. no operation of the circuit breakers,
-
the conditions before the fault must be known accurately and must allow extrapolation,
-
the source characteristics should not change noticeably. This is true for times short enough
in relation to the mechanical time constants of the generators.
When these requirements are fulfilled, the superimposed values determine the characteristics of
the fault and allow the filtering of the values before the fault, as for example the transient values.
The network is then said to be "healthy" before the fault occurrence.
Network Status Monitoring
The network status is monitored continuously to determine whether the "High-Speed" algorithms
may be actuated. So, for these algorithms to be used, the network must be "healthy", which is
true if:
-
the line is not open,
-
all voltages are between 70 % and 130 % of the nominal value,
-
the residual voltage is less than 10 % of the nominal value,
-
the residual current is less than 10 % of the nominal value + 3.3 % of the maximum current
flowing on a line,
-
there is no power swing on a network,
-
the impedance points are outside the characteristic,
-
frequency tracking has been established.
For the network to be declared "healthy", these conditions
must be verified over a period at least 160 ms.
2-9
EPAC 3100/3500
MS/M 1.6882-C
Detecting a Transition
Detecting a transition, the EPAC compares sampled current and voltage values at the instant "t"
with the values predicted from those stored in the memory one period and two periods
previously.
G(t)= current or voltage
Gp(t)
2T
T
G(t - 2T)
G(t - T)
G(t)
t-2T
t-T
t
Time
Figure 2.3b: Recorded Transition values
Gp(t) = 2G(t-T) - G(t-2T) where Gp(t) is the predicted value.
A transition is detected on one of the current or voltage input values if the absolute value of
(G(t) - Gp(t)) exceeds a threshold of 0.2 In or, 0.1 Un/√3.
∆G(t) = G(t) - Gp(t) is the transition value of the reading G.
In order to eliminate the transitions generated by possible operations or by high frequencies,
the transition detected over a succession of 2 sampled values is confirmed by checking for at
least one loop that:
-
∆U > threshold U, where threshold U = 0.1 Un/√3
-
∆I > threshold I, where threshold I = 0.2 In.
2-10
EPAC 3100/3500
MS/M 1.6882-C
Defining the Directional
The "delta" detection of fault direction is performed for all type of faults from the sign of the threephase power obtained from the superimposed values of current and voltage caracterising the
fault.
Forward fault
I
fault
V
Reverse fault
fault
I
V
Figure 2.3c: Defining the Directional using Superimposed Values
To do this, the following sum is calculated
ni
S = ∑ (∆UA . ∆IA + ∆UB. ∆IB + ∆UC . ∆IC )
n0
where n0 is the instant at which the fault is detected, ni is the instant of the calculation and S is
the transition power.
If the fault is in the forward zone, then S < 0.
If the fault is in the reverse zone, then S > 0.
The directional criterion is valid if:
S ≥ 5 . (0.1 Vn . 0.2 In . cos 85°)
This sum is calculated on five successive samples.
Phase Selection
Phase selection is made on the basis of a comparison between the transition values for the
derivatives of currents IA, IB and IC (a band-pass FIR derivator applied to all currents (phase to
earth, phase to phase,residual)):
∆I’A ∆I’B ∆I’C ∆I’AB ∆I’BC ∆I’CA
2-11
EPAC 3100/3500
MS/M 1.6882-C
The derivatives of the currents are used to eliminate the
effects of the DC current component.
Hence:
SA = ∑ (∆I’A)2
SB = ∑ (∆I’B)2
SC = ∑ (∆I’C)2
SAB = ∑ (∆I’AB)2
SBC = ∑ (∆I’BC)2
SCA = ∑ (∆I’CA)2
The phase selection is valid if the sum (SAB + SBC + SCA ) is higher than a threshold. This sum is
not valid if the positive sequence impendance on the source side is far higher than the zerosequence impedance. In this case, the conventional algorithms are used to select the phase.
If the sum is valid, sums on one-phase and two-phase loops are classified. The classification of
these sums determines the faulty phase(s).
Example:
Let us assume, for instance, that:
SAB < SBC < SCA,
SA < SB < SC.
If SAB < < SBC, the fault has had little effect on the loop AB. If the fault is not detected as singlephase by the previous criterion, the fault conditions are multi-phase, in this case BC.
If SAB ≈ SBC ≈ SCA and SA ≈ SB ≈ SC, the fault is three-phase
(the fault occurs on the three phases).
2.3.1.2. "Conventional" Algorithms
The "Conventionnal" algorithms are continuously activated in addition to the "High-speed"
algorithms. The selection of either of one of the algorithms' results depends on the network's state
when the fault occurs.
If the network is said to be "Healthy" when the fault occurs, the relay will use the "High-speed"
algorithms' results.
If the network is faulty, the relay will use the "Conventionnal" algorithms' results.
These algorithms do not use superimposed values, but the actual measured values of current and
voltage under steady-state or fault conditions.
The results obtained by the "Conventional" algorithms are used in the tripping logic when the
delta algorithms are not in application.
All 6 loops are running in parallel and fault determination
algorithm runs parallely all the time.
Start-Up
Start-up is initialised when at least one of the 6 measuring loops converges within the
characteristic.
2-12
EPAC 3100/3500
MS/M 1.6882-C
Phase Selection
If the fault currents are high enough with respect to the maximum load currents, the current phase
selection is used; if not, the impedance phase selection is required.
Current Phase Selection
Amplitudes I’A, I’B, I’C derived from the three phase currents IA, IB, IC are measured. These values
are then compared to each other and to the two thresholds S1 and S2:
where first threshold is S1 = 3 I’n
second threshold is S2 = 5 I’n
Example:
If I’A < I’B < I’C:
-
If I’C > S2 and I’A > S1, the fault is three-phased,
-
If I’C > S2, I’B > S1, the fault is two-phased, on phases BC (if I’a < S1),
-
If I’C > S2 and I’B < S1, the fault is single-phased, on phase C,
-
If I’C < S2, the current phase selection cannot be used. Impedance phase selection should
therefore be used.
Impedance Phase Selection
Impedance phase selection is obtained by checking the convergence of the various measuring
loops within the start-up characteristic.
-
T = Presence of zero-sequence voltage or current,
-
ZA = Convergence within the characteristic of the loop A,
-
ZB = Convergence within the characteristic of the loop B,
-
ZC = Convergence within the characteristic of the loop C,
-
ZAB = Convergence within the characteristic of the loop AB,
-
ZBC = Convergence within the characteristic of the loop BC,
-
ZCA = Convergence within the characteristic of the loop CA,
In addition, the following are also defined:
-
RA = ZA. ZBC with ZBC = convergence within the characteristic of the loop BC,
-
RB = ZB. ZCA with ZCA = convergence within the characteristic of the loop CA,
-
RC = ZC .ZAB with ZAB = convergence within the characteristic of the loop AB,
-
RAB = ZAB . ZC with ZC = convergence within the characteristic of the loop C,
-
RBC = ZBC . ZA with ZA = convergence within the characteristic of the loop A,
-
RCA = ZCA . ZB with ZB = convergence within the characteristic of the loop B.
2-13
EPAC 3100/3500
MS/M 1.6882-C
The different phase selections are:
-
SA = T . RA . RB . RC
single phase A to ground fault,
-
SB = T . RB . RA . RC
single phase B to ground fault,
-
SC = T . RC . RB . RC
single phase C to ground fault,
-
SAB = T . RAB . ZA . ZB
double phase AB to ground fault,
-
SBC = T . RBC . ZB . ZC
double phase BC to ground fault,
-
SCA = T . RCA . ZA . ZC
double phase CA to ground fault,
-
SAB = T . RAB . RBC . RCA
double phase AB fault,
SBC = T . RBC . RAB . RCA
double phase BC fault,
-
SCA = T . RCA . RAB . RBC
double phase CA fault,
-
SABC = ZA . ZB . ZC . ZAB . ZBC . ZCA three phase fault.
For a three phase fault, the fault resistance of one of the two-phase loops is less than half of the
fault resistances of the other two-phase loops, it will be used for the directional and distance
measuring function. If not, the loop AB will be used.
Impedance phase selection is used only if current phase
selection is unable to make a decision.
Defining the Directional decision
The fault direction is defined on the basis of the calculation of the phase shift between the stored
voltage and the derivative of a current. The current and the voltage used are those of the
measuring loop(s) defined by the phase selection.
For the two-phase loops:
the calculation of the phase shift between the stored voltage and the derivative of the current
on the faulty two-phase.
For the single-phase loops:
calculation of the phase shift between the stored voltage and the current (I’x + K0I’r), where:
-
I’x
= derivative of current on the faulted single-phase where x =A, B or C
-
I’r
= residual current
-
K0
= earth coefficient where K0 = (Z0-Z1)/3Z1
The directional angle is fixed -30°, +150°.
2-14
EPAC 3100/3500
MS/M 1.6882-C
Reactance/Resistance measurement and distance calculation
To measure the distance and apparent resistance of a fault, the following type of equation should
be solved on the loop with a fault:
Figure 2.3d: Distance and Resistance Measurement
The following describes how to solve the above equation (determination of D and R). The line
model used will be the 3 x 3 matrix of the line impedances (resistive and inductive) of the three
phases, and mutual values between phases.
Raa + Daa
Rab + Dab
Rac + Dac
Rac + Dac
Rbb + Dbb
Rcc + Dbc
Rac + Dac
Rbc + Dbc
Rcc + Dcc
with:
Raa = Rbb = Rcc
Rab = Rbc = Rac.
The line model is obtained from the positive and zero-sequence impedances. The use of two
different zero-sequence impedances is permitted on the relay:
-
Z01: zero-sequence impedance used to calculate faults in zone 1,
-
Z02: zero-sequence impedance used to calculate faults in zones 2, 3, 4 and 5 (reverse zone).
The model for the current circulating in the fault resistance is:
-
for two-phase loops: (IA - IB), (IB - IC) or (IC - IA),
-
for single-phase loops: Ir then IA, IB or IC.
The Ir current is used for the first 40 milliseconds to model the fault current, thus eliminating the
load current if the circuit breakers are not operated during the 40 ms. After the 40 ms, the load
current is used.
2-15
EPAC 3100/3500
MS/M 1.6882-C
The solutions "D" and "R" are obtained by solving the system of equations (one equation per
step of the calculation) using the Gauss Seidel method.
RN =
∑ (Un ⋅ Wn ) − Dn−1 ⋅ ∑ ( Vn ⋅ Wn )
∑ (Wn )2
DN =
∑ (Un ⋅ Wn ) − Rn−1 ⋅ ∑ ( Vn ⋅ Wn )
∑ ( Vn )2
Convergence Analysis
This analysis is based on the calculation of distance and resistance. These results are taken on
each of the single-phase and two-phase loops. They determine the convergence of these loops
within a parallelogram-shaped start-up characteristic.
L = line length in km or miles
Distance
D
D4 = Z4/Zd x L
D5 = Z5/Zd x L
For multi phase fault :
θd = argument of Zd (positive sequence impedance)
For single phase fault :
θd = argument of (2Zd + Z02)/3
for zones 2, 3, 4, 5
θd = argument of (2Zd + Z01)/3
for zone 1
D lim
= D4
θd
R
- R lim
lim
Resistance R
D5
Figure 2.3e: Start-up Characteristic
Let Rlim and Dlim be the limits of the starting characteristic. The pair of solutions (DN, RN) is
convergent in the characteristic if the following conditions are confirmed for two consecutive
results (DN-1, RN-1) and (DN, RN):
-
RN-1 < Rlim and RN < Rlim and RN-1 - RN < 10% Rlim
-
DN-1 < Dlim and DN < Xlim and DN-1 - DN < 10% Xlim
with Rlim being the resistance limit for the single and multi phase faults.
The zone limits are l D lim l, +Rlim, -Rlim and are related to the directional decision. The slope
of the characteristic is fixed for each loop by the characteristic of the line.
To model the fault current in the following loops:
-
two-phase loops: the values (IA - IB), (IB - IC) or (IC - IA) are used,
-
single-phase loops: the results of these algorithms are mainly used as a back-up, thus the
circuit breaker located at the other end is assumed to be open. To model the fault current,
the values IA, IB and IC are used.
2-16
EPAC 3100/3500
2.3.2.
MS/M 1.6882-C
Zone Definition
The definition of the zone consists in determining the distance-resistance interval where a fault,
processed by the "High-Speed" or "Conventional" algorithms, is located.
2.3.2.1. Directional distance protection mode
For short distance lines, it is necessary to have a resistance reach for each zone in order to reduce
measurement errors of CVTs and VTs (R/X ratio ≤ 6). Three forward zones, one reverse zone
and one settable zone (forward or reverse) have therefore been defined. These zones are limited
as follows:
-
in impedance, by Z1, Z2, Z3, Z4 and Z5,
-
in resistance, by R1M, R1B, R2, R3 and Rlim.
Zone 1 covers 2 different resistive zones, one for phase-to-earth faults and the other for phaseto-phase faults.
Zone 5 is a reverse zone. The time delay associated with this zone enables reverse current faults
to be eliminated faster.
Zone 3 can be set as a forward or reverse zone. If set to reverse it is associated with zone 5,
thus providing two different zones and two different time delays for the management of reverse
current faults.
2-17
EPAC 3100/3500
MS/M 1.6882-C
X
(loop)
Example of
phase-to-earth characteristic
with zone 3 set forward
X4 . (1+K02)
Z4
Zone 4 (T4)
X3 . (1+K02)
Z3
Zone 3 (T3)
X2 . (1+K02)
Z2
Zone 2
Z1 (T2)
X1X . (1+K01)
Zone 1X
(T1)
X1 . (1+K01)
Zone 1
(T1)
R1M R2 R3
Zone 5 (T5)
Z5
Example of
phase-to-phase characteristic
with zone 3 set reverse
X4 . 2
Rlim
R (loop)
X5 . (1+K02)
X
(loop)
Z4
Zone 4 (T4)
X2 . 2
X1X . 2
X1 . 2
Z2
Zone 2
(T2)
Z1
Zone 1X
(T1)
Zone 1
(T1)
–R3
R1B
Zone 3 (T3) Z3
Zone 5 (T5)
Z5
R2
X3 . 2
X5 . 2
Figure 2.3f: Zone characteristics for a line
Rlim
R (loop)
2-18
EPAC 3100/3500
MS/M 1.6882-C
2.3.2.2. Busbar isolation mode
Busbar isolation mode is used to isolate busbars if there is a fault on them. This mode is nondirectional as the link must be broken quickly since the fault may arrive from a busbar situated
in the forward or reverse direction of the protection device.
To ensure selectivity and to trip on busbar faults only:
-
Zone 1 must be smaller than zone 1 of the shortest line leaving the substation,
-
the T1 time delay must be longer than the T1 time delays for the lines leaving the substation
plus the time to open a circuit breaker.
If the EPAC is used as a stand-by protection device:
-
Zone 2 covers the most distant adjacent substation,
-
Zones 3 and 4 usually have the same settings as zone 2.
X/loop
X4.(1+K02)
X3.(1+K02)
Z4
Zone 4 (T4)
Z3
X2.(1+K02)
Z2
X1.(1+K01)
Z1
Zone 3 (T3)
Zone 2 (T2)
Zone 1 (T1)
R1M
R2
R3 Rlim
R/loop
-Z1
-Z2
-Z3
-Z4
Figure 2.3g: Zone characteristics for a busbar (phase-to-earth impedance loop)
2-19
EPAC 3100/3500
MS/M 1.6882-C
2.3.2.3. Convergence in a zone
For both modes, the resistance R1 for zone 1 can be set separately for phase-to-earth and phaseto-phase faults.
The measurement of impedance for single phase faults is based on a Z01 parameter for a fault
in zone 1 and on a Z02 parameter for a fault in another zone. Both parameters can be set by
the user.
Fault zone
Fault type
Fault impedance without fault resistance
1
Phase-to-earth
(2Zd + Z01)/3
Phase-to-phase
Zd (positive sequence impedance)
Phase-to-earth
(2Zd + Z02)/3
Phase-to-phase
Zd (positive sequence impedance)
2, 3, 4, 5
The zones are defined for a convergence between the x and r limits related to each zone. So,
the solution pair (xn,rn) is said to be convergent if:
-
rn-1 < Rlim and rn < Rlim and rn-1 - rn < 10% Rlim
-
xn-1 < Xlim and xn < Xlim and xn-1 - xn < k% Xlim
where
k = 5% if Xlim = X1
k=10% if Xlim = X2, X3, X4 or X5
The detection of a fault by the "High-Speed" algorithms
resets the iterative calculation of the fault distance-resistance. The calculation using "Conventional" algorithms is
based on the study of the convergence of measuring loops
and, thus, does not need to be reset.
Example Showing the Use of Z01 and Z02
Z3
Z2
Z1
EA
(L1) 7 km
(L2) 3 km
EB
ZSB
ZSA
Line Zdl
Z0l
Cable Zdc
Z0c
length to be entered: 10 km
total positive sequence impedance to be protected
Zd = Zdl + Zdc
for Z1 = 0.8 Zd and for Z2 = 1.2 Zd
Z01 = (Z0l/L1).(L1+L2)
Z02 = Z0l+Z0c
If you only have the impedance values measured before the transformers (in HV Ohms), the
impedances in LV Ohms are calculated as follows:
ZBT = (Current transformer ratio/voltage transformer ratio).Zmeasured.
∆ VB > 0,1 V n
∆ VA > 0,1 V n
or
∆ VBC > 0,1 V n
∆IBC > 0,2 I n
or
∆ VAB > 0,1 V n
BC
AB
∆IAB > 0,2 I n
∆ VCA > 0,1 V n
or
∆ICA > 0,2 I n
CA
T . RC . RA . RB
SAB < SBC < SCA
SAB << SBC
SA < SB < SC
W = Ir
W = Ir
W = Ir
W = Ir
V = M 1 IB
V = M 1 IA
V = M 2 IB
U = VB
U = VA
U = VB
W = IB
W = IA
U = VA
V = M 2 IB
V = M 2 IA
U = VB
V = M 2 IA
I'B + kOI'r
I'A + kOI'r
U = VA
VB
W = Ir
V = M 2 IC
U = VB
W = Ir
V = M 1 IC
U = VB
W = IC
V = M 2 IC
U = VC
I'C + kOI'r
VC
W = IA - IB
V = M .(IA - IB)
U = VA - VB
W = IA - IB
V = M .(IA - IB)
U = VA - VB
W = IA - IB
V = M .(IA - IB)
U = VA - VB
I'A - I'B
VA - VB
T . RAB . ZA . ZB
or
T . RAB . RBC . RCA
SBC < SAC < SAB
SBC
SAC
SC < SB < SA
W = IB- IC
V = M .(IB - IC)
U = VB - VC
W = IB - IC
V = M .(IB - IC)
U = VB - VC
W = IB - IC
V = M .(IB - IC)
U = VB - VC
I'B - I'C
VB - VC
T . RBC . ZB . ZC
or
T . RBC . RAB . RCA
SAC < SAB < SBC
SAC
SAB
SA < SB < SC
W = IC - IA
V = M .(IC - IA)
U = VC - VA
W = IC - IA
V = M .(IC - IA)
U = VC - VA
W = IC - IA
V = M .(IC - IA)
U = VC - VA
I'C - I'A
VC - VA
T . RCA . ZA . ZC
or
T . RCA . RAB . RBC
SAB < SBC < SCA
SAB
SBC
SB < SC < SA
SBC SCA
SB SC
W = IA - IB
V = M .(IA - IB)
U = VA - VB
W = IA - IB
V = M .(IA - IB)
U = VA - VB
W = IA - IB
V = M .(IA - IB)
U = VA - VB
I'A - I'B
VA - VB
ZBC . ZCA
ZA . ZB . ZC . ZAB
SAB
SA
∆ VABC > 0,1 V n
or
∆IABC > 0,2 I n
ABC
EPAC 3100/3500
Measurement
algorithm
for zones 2, 3,
4 and 5
Measurement
algorithm
for zone 1
Watching
algorithm
∆ VC > 0,1 V n
or
(∆VA . ∆IA) + (∆VB . ∆IB) + ( ∆VC . ∆IC)
T . RB . RC. RA
SCA < SBC < SAB
SCA << SBC
SA < SC < SB
VA
n0
ni
T . RA . RB . RC
Conventional
algorithm
phase selection
S=
SBC < SCA < SAB
SBC << SCA
SC < SB < SA
High speed
algorithm
directional
determination
Conventional
algorithm
directional
determination
CN
∆ IC > 0,2 I n
FAULT
Start-up is initialised when at least one of the 6 measuring loops converges
within the caracteristic.
or
or
BN
∆I B > 0,2 I n
AN
∆IA > 0,2 I n
High speed
algorithm
phase selection
Conventional
start-up
High speed
start-up
Algorithms
2-20
MS/M 1.6882-C
Quantities used by the different algorithms
M: impedance for multi phase faults
M1: impedance for single phase to ground fault in zone 1 computed with the zero-sequence impedance Z01
M2: impedance for single phase to ground fault in zones 2, 3, 4 or 5 computed with zero-sequence impedance Z02
2-21
EPAC 3100/3500
MS/M 1.6882-C
2.3.3.
Algorithm chaining
STEP 0
Acquisition and filtering
of samples
Y
Line open
Switch-on-to-fault
STEP 3
Impedance measurements on all 6 loops
(ZAN, ZBN, ZCN, ZAB, ZBC, ZCA)
N
Y
Network
healthy
N
N
Convergence in
characteristic of
all 6 loops
STEP 2
Y
Delta algorithms
STEP 1
Y
Phase
selection
Classic
algorithms
Detection of
transition
Impedance
measurements
Fault confirmation
Phase
selection
Direction
Direction
Tripping logic
Decision to trip using delta algorithms during 40 ms
Decision to trip using classic algorithms
The EPAC is supposed to be in the step 0. The product is protecting a sound network.
When a fault occurs on a network, the starting of the relay can be done by a confirmed transition
("high speed algorithm") and a loop convergence inside the start-up characteristic (conventional
algorithm) simultaneously.
During "high speed" algorithms processing, the EPAC goes to step 1. The timers are activated.
The directional element and the phase selection are determined by the "high speed algorithm".
The fault distance and resistance are computed by the "measurement algorithm".
During "conventional" algorithms processing (which runs parallely to high speed algorithms),
the EPAC goes to step 2.
Only the conventional algorithms are used for the directional and phase selection determinations.
The fault distance and resistance are computed from the measurement algorithm for the faulty
phase.
If the circuit breaker recloses on to fault, the relay goes to step 3 and trips three-phase, otherwise
it goes to step 0 (no fault detection).
2-22
EPAC 3100/3500
2.3.4.
MS/M 1.6882-C
Tripping Logic
Three tripping modes can be selected:
-
single-phase tripping for single-phase faults in zone 1 and 2 and three-phase tripping in
zones 3 and 4,
-
single-phase tripping in zone 1 only,
-
three-phase tripping whatever be the type of fault.
There are 5 time delays associated with the 6 zones present. Zone 1 and extended zone 1 have
the same time delay.
The allocation of the steps to the zones may be modified by additional actions:
-
teleprotection,
-
zone reach control.
The tripping contact can be sealed-in in the closed position for as long as the current is present
in the phase in question. To do this, the current in the faulty phase is compared to a adjustable
threshold (SEALIN).
2.3.5.
Tripping Logic with Teleprotection
Teleprotection is used to modify the protection characteristics from a remote end relay.
The EPAC is provided with digital inputs/outputs allowing it to operate in teleprotection mode.
The transmission conditions and the action performed when a teleprotection message is received
may be adjustable in an independent way.
The adjustable parameters are the following:
-
the type of teleprotection taken into account:
. on the main line,
. on the T-Line, if applicable,
-
use of two teleprotection signals,
-
conditions for transmitting the teleprotection signals,
-
weak source mode, also called Weak Infeed.
Acknowledgement of Teleprotection Messages
Teleaction modes are a combination of two types of characteristics:
-
protection reach: overreach or underreach,
-
type of signals to be exchanged: authorisation or acceleration signals, or blocking signals.
Accelerated underreach protection (AUP or PUR)
This scheme is generally used for medium length or long distance lines.
If relay C detects a fault in zone 1 or zone 2 (according to the chosen configuration), it will trip
upon expiry of T1 and send an acceleration command to relay D.
2-23
EPAC 3100/3500
MS/M 1.6882-C
If relay D detects a fault in zone 1:
-
and receives an acceleration command from relay C, it will trip upon the expiry of T1,
-
and does not receive any acceleration command from relay C, it will trip upon the expiry of
T2, since in that case the fault is beyond the protected line.
. T1 = step 1 time delay,
. T2 = step 2 time delay.
Zone 2
C
D
Zone 1
Zone
extension
Zone 1
Zone 2
Acceleration
Fault in
zone 2
Fault in
another
zone
Fault in
zone 1
Valid
transmission
in zone 1
Fault in
zone 1
or zone 2
Valid
transmission
in zone 2
Acceleration
&
Step 1
time delay
Step 1
time delay
&
&
Step 2
time delay
Step 2
time delay
&
Associated
step
time delay
Tripping
Tripping
Fault in
zone 2
Associated
step
time delay
&
Fault in
another
zone
&
Acceleration
Acceleration
&
&
Figure 2.3h: Tripping in accelerated underreach mode
If the relay is being unblocked during a power-swing
condition, or if a fault is detected after a single-phase trip,
the above scheme is replaced by the scheme shown in
figure 2.3z.
Fault in
zone 1
Valid
transmission
in zone 1
Fault in
zone 1
or zone 2
Valid
transmission
in zone 2
2-24
EPAC 3100/3500
MS/M 1.6882-C
Permissive Overreach Protection (POP)
US: Permissive Overreach Transfer Trip protection (POTT)
This scheme is generally used for medium length or long distance lines. It normally affects
tripping in zone 1 with zone 2 set beyond the protected line.
If relay C detects a fault in zone 1, it transmits an authorisation command to relay D.
If relay D detects a fault in zone 1:
-
and receives an authorisation command from relay C, it will trip upon the expiry of T1,
-
and does not receive any authorisation command from relay C, it will trip upon the expiry
of T2, since in that case the fault is beyond the protected line.
. T1 = step 1 time delay,
. T2 = step 2 time delay.
C
Zone 1
D
Zone 1
Authorisation
Fault in
zone 1
Authorisation
&
Step 1 time
delay
Step 1
time delay
&
&
Step 2 time
delay
Step 2 time
delay
&
Tripping
Fault in
another
zone
Fault in
zone 1
Valid
transmission
in zone 1
Fault in
zone 1
or zone 2
Valid
transmission
in zone 2
Associated
step time
delay
Tripping
Associated
step time
delay
&
Authorisation
Fault in
zone 1
Fault in
another
zone
&
Fault in
zone 1
&
Valid
transmission
in zone 1
Fault in
zone 1
or zone 2
Valid
transmission
in zone 2
Authorisation
&
Figure 2.3i: Permissive overreach mode
If the relay is being unblocked during a power-swing
condition, or if a fault is detected after a single-phase trip,
the above scheme is replaced by the scheme shown in
figure 2.3z.
2-25
EPAC 3100/3500
MS/M 1.6882-C
Blocking Overreach Protection (BOP)
US: Blocking Directional Comparison Protection (BDCP)
This scheme is normally used for short distance lines. It affects tripping in zone 1 with zone 2
set beyond the protected line.
If relay C detects a fault in zone 5 (reverse), it sends a blocking command to relay D.
If relay D detects a fault in zone 1:
-
and receives a blocking command from relay C, it will trip upon expiry of T2, since in that
case the fault is beyond the protected line,
-
and does not receive any blocking signal from relay C, it will trip upon the expiry of (T1+Tt).
. T1 = step 1 time delay,
. T2 = step 2 time delay.
. Tt = Transmission time delay
A transmission time delay (Tt) is used to take into account
the transmission time of the locking command between
both protection devices. During this time delay, tripping is
locked.
Zone 5
C
D
Zone 1
Zone 5
Zone 1
Locking
Fault in
zone 1
&
&
Fault in
zone 5
Step 1 and
transmission
time delay
Step 1 and
transmission
time delay
&
Step 2
time delay
Step 2
time delay
&
Zone
associated
step
time delay
Fault in
another
zone
&
Valid
transmission
in zone 5
Locking
Locking
Tripping
Tripping
Zone
associated
step
time delay
Locking
Fault in
zone 1
Fault in
another
zone
&
Figure 2.3j: Blocking overreach mode
If the relay is being unblocked during a power-swing
condition, or if a fault is detected after a single-phase trip,
the above scheme is replaced by the scheme shown in
figure 2.3y.
Fault in
Valid zone 5
transmission
in zone 5
2-26
EPAC 3100/3500
MS/M 1.6882-C
Blocking Underreach Protection (BUP)
This scheme is normally used for short distance lines on which it is possible to set a zone 1. It
affects tripping in zone 2.
If relay C detects a fault in zone 5, it sends a blocking command to relay D.
If relay D detects a fault in zone 2:
-
and receives a blocking command from relay C, it will trip upon expiry of T2, since in that
case the fault is beyond the protected line,
-
and does not receive a blocking signal from relay C, it will trip upon the expiry of (T1+Tt).
. T1 = step 1 time delay,
. T2 = step 2 time delay.
. Tt = Transmission time delay
A transmission time delay (Tt) is used to take into account
the transmission time of the locking command between
both protection devices. During this time delay, tripping is
locked.
Zone 2
C
Zone 5
D
Zone 1
Zone 1
Zone 5
Zone 2
Locking
Fault in
zone 2
Locking
&
Step 1 and
transmission
time delay
Step 1 and
transmission
time delay
&
&
Step 2
time delay
Step 2
time delay
&
Tripping
Zone
associated
step
time delay
Fault in
another
zone
Fault in
zone 5
&
Valid
transmission
in zone 5
Locking
Défaut en
zone 2
Tripping
Zone
associated
step
time delay
Locking
Fault in
another
zone
&
Figure 2.3k: Blocking underreach mode
If the relay is being unblocked during a power-swing
condition, or if a fault is detected after a single-phase trip,
the above scheme is replaced by the scheme shown in
figure 2.3y.
Fault in
Valid zone 5
transmission
in zone 5
2-27
EPAC 3100/3500
MS/M 1.6882-C
Permissive Underreach Protection (PUP)
US: Permissive Underreach Transfer Trip protection (PUTT)
This scheme is used when the selectivity conditions are unreliable.
If relay C detects a fault in zone 1 (or zone 2 according the chosen setting), it sends an
authorisation command to relay D.
If relay D detects a forward fault:
-
and receives an authorisation command from relay C, it will trip upon expiry of T1,
-
and does not receive any authorisation command from relay C, it will trip upon the expiry
of the time delay associated with the fault zone (T1 for zone 1, T2 for zone 2, T3 for
zone 3, etc.).
Zone 2
C
D
Zone 1
Zone 1
Zone 2
Authorisation
Fault
detected
&
Forward
Authorisation
Step 1
time delay
Step 1
time delay
Tripping
Associated
step
time delay
Fault in
a zone
Fault in
zone 1
Valid
transmission
in zone 1
Fault in
zone 1
or zone 2
Valid
transmission
in zone 2
&
Fault
detected
Forward
Tripping
Associated
step
time delay
&
Fault in
a zone
&
Authorisation
Authorisation
&
&
Figure 2.3l: Permissive underreach protection
If the relay is being unblocked during a power-swing
condition, or if a fault is detected after a single-phase trip,
the above scheme is replaced by the scheme shown in
figure 2.3z.
Fault in
zone 1
Valid
transmission
in zone 1
Fault in
zone 1
or zone 2
Valid
transmission
in zone 2
2-28
EPAC 3100/3500
MS/M 1.6882-C
Failure or disturbance on the communication channel - Unblocking
If there is a possibility that disturbances could occur on the communication channel due to a fault
located on the line, two complementary signals can be used. The principle is that communication
can be disturbed for a fault located on the line to protect but will not for an external fault.
The EPAC provides two choices:
-
the unblocking mode,
-
the carrier loss mode.
These transmission modes of the teleaction signals are not
compatible with the Blocking underreach mode or blocking overreach mode.
Unblocking Mode (FSK: Frequency Shifted Keying)
The unblocking mode uses two teleaction channels:
-
one is used to transmit the permissive signal,
-
the other is used to transmit the guard signal.
If the line to be protected does not contain a fault, a guard signal is transmitted. When the
protection device detects a fault on the line to be protected, it stops transmitting the guard signal
and sends a permissive signal. The protection device which receives this combination interprets
it as a teleprotection signal (acceleration or permissive). If the EPAC does not receive a signal,
it interprets this as the reception of a teleprotection signal (acceleration or permissive) for 10 to
160 milliseconds. This considers the possibility that a fault on the line may interrupt the
communication. Likewise, if both teleprotection signals are set to 1, the EPAC interprets this as
a transmission fault and ignores the teleprotection signal (permissive or acceleration).
C
D
Fault detected at D
Locking
Signal sent
from C
&
Unlocking
&
10 ms 160 ms
Figure 2.3m: Tripping Conditions in Unlocking Mode
&
Tripping
2-29
EPAC 3100/3500
MS/M 1.6882-C
Loss of Carrier Mode
The principle of the loss of carrier mode is nearly the same as that of the FSK mode, but it requires
only one teleprotection channel transmission.
When the protection device detects a fault on the line to be protected, it transmits an acceleration
or permissive signal that is intended to be understood by the protection located at the other end.
If a communication loss occurs, the protection interprets the loss of carrier signal as a
teleprotection signal (acceleration or permissive) for 10 to 160 milliseconds. Teleaction signals
(permissive or acceleration) are always taken into account, even if the carrier is permanently
absent.
C
D
Fault detected at D
Blocking or unblocking
Signal sent
from C
&
Carrier
Tripping
&
10 ms 160 ms
Figure 2.3n: Tripping Conditions in Loss of Carrier Mode
Conditions for Transmitting Teleprotection Signals
The conditions for transmitting teleprotection signals may be set. The operator may select one
of the following modes:
-
transmission in zone 1,
-
transmission in zones 1 and 2,
-
transmission in zone 5 (reverse).
For the transmissions associated with forward zones 1 and 2, an input contact ("HF present/
unblock" = power line carrier) for the complementary signal is associated to allow operation
in the unblocking mode.
An additional forward directional transmission contact is provided by the EPAC. This message,
which does not depend on a zone definition, may be transmitted faster than the conventional
teleaction message.
Operation on a Tee Line
If there is a derivation on the line, the type of teleaction used on the tee line should be different
to the teleaction used on the main line. Because the protection devices operating in teleprotection
mode with the EPAC may have different characteristics on both lines, they may therefore need
different teleaction outlines. The types of teleaction to be used on the main line and on the branch
line can therefore be configured independently from one another.
2-30
EPAC 3100/3500
2.3.6.
MS/M 1.6882-C
Tripping logic in zone reach control mode
The zone reach control function is used to modify step 1 tripping logic during a reclosure
sequence. In fault detection mode, overreached zone 1 is associated with step 1. When zone
reduction is activated, the zone associated with step 1 is reduced to zone 1. This enables faults
to be eliminated rapidly without the need to use the teleaction channels. The technique, however,
makes a greater use of the circuit breakers.
A zone reduction command may come from:
-
the recloser incorporated in the EPAC,
-
an external recloser. In this case, the command corresponds to the zone reduction digital
input.
2.3.6.1. Operating principle
Zone 1 ext
Zone 1
Relay A
Relay B Relay C
Figure 2.3o: The Extended Zone 1 principle
When a fault appears forward of the relay C, the relay A and C protection devices trip their
respective circuit breakers.
Overreached zone 1 (Ext. zone 1) is reduced to zone 1 during the reclosure sequence.
If the fault persists when the A and C circuit breakers are closed, the relay A sees the fault in
its zone 2 and delays tripping by T2.
The figure 2.3p describes the tripping logic concerning the zone reduction for faults in zones
1 and 2.
The zone reach control function can be activated and
deactivated by the user.
2-31
EPAC 3100/3500
MS/M 1.6882-C
Zone reduction
&
Autorecloser
enabled
Circuit breaker
closing in progress
1
&
&
Overreach zone 1 fault
Zone 1 time delay
Tripping
Zone 1 fault
&
Zone 1 time delay
Start-up by
"conventional"
algorithms
* Manual reclosing
Memory voltage not valid
I > I threshold
Internal detection of circuit
breaker closure
1
&
1
&
logic
*: External
input (TS)
: External input (TS)
or internal logic
Figure 2.3p: Tripping logic with zone reduction
Operations in zone reach control mode require a distance measurement on tripping, hence the
calculation of the directional, phase selection and distance measurement.
Directional
As with conventional directionals, the directional is calculated from the stored pre-fault voltage
values. The calculation varies depending on the type of fault, i.e., single-phase or multi-phase.
Single-phase fault
The reference or memory pre-fault voltage is stored in memory when the fault appears. When
the fault is eliminated, a high-speed single-phase sequence is activated:
-
if a fault appears less than 60 milliseconds after the sequence starts, the stored voltage value
remains valid and is used to calculate the directional,
-
if no fault appears during the 60 milliseconds after the sequence starts, the voltage of one
of the healthy phases is stored as pre-fault voltage,
-
if a fault appears during the continuation of the sequence in progress or reclosure occurs,
the stored voltage value is initialised and remains valid for 10 seconds.
If the stored voltage value is invalid when one or more loops are convergent within the start-up
characteristic, the directional is forced forward and the trip is instantaneous. If the current
threshold is exceeded on reclosure, the protection device instantaneously trips three-phase.
2-32
EPAC 3100/3500
MS/M 1.6882-C
Two-phase or three-phase fault
The reference or memory voltage is stored when the fault appears. When the fault is eliminated,
the stored voltage value remains valid for 10 seconds. If reclosure occurs during these 10
seconds, the directional is calculated using the stored voltage value.
If the stored voltage value is invalid when one or more loops are convergent within the start-up
characteristic, the forward directional is forced and the trip is instantaneous when protection
starts.
If the current threshold is exceeded on reclosure, the protection device trips instantaneously
three-phase.
If the digital input "CB closed" is valid, the protection device trips immediately as soon as one
or more loops converge within the start-up characteristic.
Phase selection
Phase selection is calculated using impedance phase selection.
Distance measurement
The distance measurement is carried out on the faulty phase by taking the zone 1 measurement
values (Z1, Z01) as the measurement element for the zone 1 and overreached zone 1 faults.
The computations for the other calculation zones are made using the fault detection values Z1
and Z02.
2.3.7.
Overcurrent Start-Up
This function is used to deal with faults detected outside the start-up characteristic. It activates
a three-phase trip if the current threshold is exceeded for a settable length of time. It constitutes
a backup protection against forward and/or reverse current faults.
The function is associated with two settable current thresholds, a high threshold (I>) and a very
high threshold (I>>). A direction can be associated with each of these thresholds so that only
the threshold overreaches detected on one side or the other of the protection relay are taken into
account. Each current threshold has a settable time delay associated with it. Overcurrent startup is determined by the direction, if any, assigned to each threshold. The function is only
activated if there is no start-up by "conventional" algorithms or as a result of confirmed fuse
failure.
The overcurrent start-up function allows 1 or 2 current
thresholds to be selected. It can be disabled.
If the directions assigned to the I> and I>> thresholds are the same:
-
the I> (high) threshold must be lower than the I>> (very high) threshold,
-
the T> time delay associated with the I> (high) threshold must be longer than the T>> time
delay associated with the I>> (very high) threshold.
2-33
EPAC 3100/3500
MS/M 1.6882-C
If the directions assigned to the I> and I>> thresholds are different, these thresholds and the
respective T> and T>> time delays can be selected independently.
Time delays T> and T>> can be set independently of time
delays T1, T2, T3, T4 and T5. A warning message reminds
the user of the consistencies to be respected.
2.3.7.1. Operation According to Threshold Directionals
The following paragraphs describe the role of the protection function according to the directions
set for each current threshold.
I>> Threshold Set to Forward - I> Threshold Set to Reverse
t
I>>, T>>
I>, T>
Z4, T4
Z5, T5
Z3, T3
Z2, T2
Z1, T1
Reverse
Forward
Distance
Figure 2.3q: I>> Set to Forward - I> Set to Reverse
In this case the I>> threshold operates as a forward backup protection. The trip is three-phase
if the forward fault is still present on expiry of the T>> time delay associated with I>>.
The I> threshold operates as a reverse current backup protection. The trip is three-phase if the
forward fault is still present on expiry of the T> time delay associated with I>.
I>> and I> Thresholds Set to Forward
t
I>, T>
I>>, T>>
Z5, T5
Z4, T4
Z3, T3
Z2, T2
Reverse
Z1, T1
Forward
Distance
Figure 2.3r: I>> and I> Thresholds Set to Forward
In this case both the I>> and I> thresholds operate as forward backup protections. The trip is
three-phase if:
-
the duration of an I>> (very high) threshold overreach detected in a forward zone exceeds
T>>,
-
the duration of an I> (high) threshold overreach detected in a forward zone exceeds T>.
2-34
EPAC 3100/3500
MS/M 1.6882-C
I>> Threshold Set to Forward - I> Threshold with No Directional
t
I>, T>
I>, T>
I>>, T>>
Z5, T5
Z4, T4
Z3, T3
Z2, T2
Z1, T1
Reverse
Forward
Distance
Figure 2.3s: I>> Threshold Set to Forward - I> Threshold with No Directional
In this case the I>> threshold operates as a forward backup protection. The I> threshold operates
as a backup protection against both forward and reverse current faults. The trip is three-phase
if:
-
the duration of an I>> threshold overreach detected in a forward zone exceeds T>>,
-
the duration of an I> threshold overreach detected in a forward or reverse zone exceeds T>.
I>> and I> Thresholds with No Directional
t
I>, T>
I>, T>
I>>, T>>
I>>, T>>
Z4, T4
Z5, T5
Z3, T3
Z2, T2
Reverse
Z1, T1
Forward
Distance
Figure 2.3t: I>> and I> Thresholds with No Directional
In this case both the I>> and the I> thresholds operate as backup protections against both
forward and reverse current faults. The trip is three-phase if:
-
the duration of an I>> threshold overreach exceeds T>>,
-
the duration of an I> threshold overreach exceeds T>.
2-35
EPAC 3100/3500
MS/M 1.6882-C
2.3.7.2. Start-Up
The current of each phase is compared with the selected current thresholds. If a threshold is
exceeded:
-
if there is no directional associated with the threshold crossed, the fault direction is not
calculated and the protection is started up,
-
if there is a directional associated with the threshold crossed, the fault direction is calculated
and the protection is started up only if the direction corresponds to the one configured for
the threshold.
Protection start-up on current threshold overreach is only
possible if none of the loops is within the characteristic for
start-up by "conventional" algorithms.
Protection start-up on current threshold overreach is disabled in the case of confirmed fuse failure.
2.3.7.3. Phase Selection
If the protection is activated by the overcurrent start-up function, the appropriate phase fault
signal is validated.
2.3.7.4. Operation with an Auto-Recloser
If the EPAC is equipped with an auto-recloser function, the latter can be used for reclosing after
three-phase tripping by the overcurrent start-up function. In this case the three-phase reclosing
mode set for the main protection relay is used.
The auto-recloser can be blocked by the T> or T>> time delays associated with overcurrent startup. If reclosing is requested after T> or T>>, a check the operator should check that reclosing
is not blocked by the T2, T3, T4 or T5 time delays.
2-36
EPAC 3100/3500
2.3.8.
MS/M 1.6882-C
Functions Associated with Distance Protection
2.3.8.1. Associated Inputs/Outputs
Input name
Meaning
Line fuse failure
Line VT fuse has blown
(1=MCB tripped; 0=no fuse faillure)
Busbar fuse failure
Busbar VT fuse has blown
Manual reclosing
Manual closing on "circuit breaker closing" external
signal
Carrier receive
Reception of a teleaction signal
Carrier receive for tee line
Reception of a teleaction signal for a tee line
Blocking protection
Protection blocking on external command
Three phase trip
Three-phase tripping on external command
HF present / Unblock
Protection unblocking if "HF presence" is valid
HF present Tee / Unblock
Protection unblocking if "HF presence" is valid - for
tee line
Zone reduction
Zone reach control with the auto recloser function
and distance protection
CB closed
Indicates the position of the circuit breaker
(1=closed; 0= opened)
Output name
Meaning
Phase A tripping
Phase A tripping by the distance protection unit
Phase B tripping
Phase B tripping by the distance protection unit
Phase C tripping
Phase C tripping by the distance protection unit
Single pole trip
Single phase tripping by the distance protection unit
Three-phase trip
Three-phase tripping by the distance protection unit
Phase A selection
Fault indication on phase A
Phase B selection
Fault indication on phase B
Phase C selection
Fault indication on phase C
Forward directional
Forward fault indication
Reverse directional
Reverse fault indication
Zone 1 fault
Fault detected in zone 1
Zone 2 fault
Fault detected in zone 2
Zone 3 fault
Fault detected in zone 3
Zone 4 fault
Fault detected in zone 4
Zone 5 fault
Fault detected in zone 5 (reverse zone)
Starting
Starting of the distance protection
2-37
EPAC 3100/3500
MS/M 1.6882-C
Output name
Meaning
Multi phase fault
Multi-phase fault indication
Single phase fault
Single-phase fault indication
Carrier send
Transmission of a teleaction command
Carrier send for tee line
Transmission of a teleaction command for a tee line
Protection blocking
All protection fonctions are blocked
Self test in progress
Indicates a restart of the relay
Urgent alarm
Equipment fault which may affect a tripping decision
Non urgent alarm
Equipment fault which may not affect a tripping
decision
Fuse failure
Confirmed fuse failure of a voltage transformer
Fuse failure trip
Tripping after "Fuse failure"
Auto recloser blocking
Auto recloser blocking by the distance protection
Unblocking signal transmission
Transmission of an unblocking command
Unblocking signal transmission
for tee line
Transmission of an unblocking command for a tee
line
Power swing detection
Power swing detected of the relay
Weak-infeed trip
Tripping on weak infeed detection
2.3.8.2. Weak Source Mode or "Weak Infeed"
The source that supplies one of the ends of the line may be too weak for the protection device
to be able to detect a fault. This has two disadvantages:
-
tripping is prevented,
-
the protection device at the other end does not receive the message that the fault is on the
protected line.
The EPAC’s "weak infeed" mode eliminates these disadvantages. It consists of two functions:
-
the ECHO function, which transmits an acceleration signal to the protection device on the
strong source side,
-
the trip function, which single-phase or three-phase trips according to phase selection.
Phase selection determines the trip type (single- or threephase) according to the number of phases with insufficient
voltage.
2-38
EPAC 3100/3500
MS/M 1.6882-C
receive
* Carrier
for Tee line
Tee line
enabled
1
L 60 ms
200 ms
&
message
* Teleaction
received on main
L 60 ms
200 ms
channel
Voltage drop
on at least 1 phase
Use voltage drop
decision? Yes = 1, No = 0
1
Starting
* Fuse failure
* Blocking
protection
Internal detection
of fuse failure
Weak Infeed
blocked on
power swing
Power swing
detection
&
&
Reverse fault
Validation
&
&
> Time
1
logic
*: External
input (TS)
: External input (TS)
or internal logic
Figure 2.3u: Tripping logic in Weak Infeed mode
It is possible to confirm the above conditions with an undervoltage criterion, the comparison threshold of which may
be set.
When the "weak infeed" mode is selected, the function is activated if:
-
the protection has not been started up,
-
there is no reverse directional information,
-
a teleaction message is received.
If the above conditions are confirmed, when a teleaction message is received, the protection
device returns a message allowing the protection device on the other end to cover the whole
line (Echo Mode).
The tripping by the EPAC may be authorised when the "weak infeed" mode is active.
In this case, phase selection may be set on the basis of insufficient voltage so that a single-phase
tripping may occur. This criterion then uses the "confirmation threshold" on the basis of
insufficient voltage. The tripping in this mode may be confirmed by a minimum current threshold
of 0.05 In. If all the currents are less than this threshold, no tripping is activated. This criterion
prevents tripping during a cycle when a circuit breaker opens and allows three-phase tripping
during a cycle.
The user must set a blocking time in weak infeed mode. This time is initiated just after the starting
element of the relay has dropped off. This timer avoids tripping again after a sequential tripping.
2-39
EPAC 3100/3500
MS/M 1.6882-C
2.3.8.3. Power swing detection
Power swings are caused by a lack of stability in the network with sudden load fluctuations. They
result in desynchronisation of the two sources on either side of the protected line.
The power swing detector is used to prevent accidental tripping when the measured impedance
point moves into the start-up characteristic.
The following diagram illustrates the characteristics of power swing.
X
Trajectory of
impedance
point for a
desynchronisation
Line angle
∆X
Power swing band
Forward
start-up
Trajectory of
impedance
point for a
power swing
∆R
Reverse
start-up
R
∆R=∆X
Figure 2.3v: Power swing
Power swing detection
The power swing detection element is used to detect any power swing or loss of synchronisation
near the loop convergence characteristic. This prevents the distance protection unit from tripping
the associated circuit breaker accidentally.
Power swing detection is based on the status of the line to be protected:
Closed line
Power swings are characterised by the simultaneous appearance of 3 single phase impedance
points in the start-up zone. Their speed of entry is slower than that in the case of three-phase faults.
A power swing is detected if:
-
at least 1 single-phase impedance is within the start-up zone after having crossed the power
swing band in more than 5 ms,
-
the 3 impedance points have been in the power swing band for more than 5 ms.
2-40
EPAC 3100/3500
MS/M 1.6882-C
Line in one pole open condition
In this case, the power swing only occurs on 2 phases. A power swing is detected if:
-
at least 1 single-phase impedance is within the start-up zone after having crossed the power
swing band in more than 5 ms,
-
the 2 impedance points have been in the power swing band for more than 5 ms.
During an open pole condition, the protection device
monitors the power swing on two single-phase loops. No
external information needs to be wired if the voltage
transformers are on the line side. If the voltage transformers
are on the busbar side, the "poles discrepancy" signal
should be used. The "poles discrepancy" input represents
a "one circuit breaker pole open" condition.
Conditions for isolating lines
If there is a power swing, it may be necessary to trip out and disconnect the two desynchronised
sources. There are various blocking and unblocking options available that are used to avoid the
tripping of all the protection devices between the two sources.
The functions blocked due to the power swing can be configured. It may be:
-
the zones,
-
the teleprotection transmission,
-
the teleprotection reception,
-
the weak-infeed mode.
The selective blocking of the zones allows the EPAC to separate the network near the electrical
zero by tripping in zone 1 only. Therefore, in the example given in figure 2.3w, the D protection
trips out.
Electrical zero
A
B
C
D
E
F
Figure 2.3w: Protection Selective Blocking
Selective blocking is possible with three-phase or singlephase tripping. Unblocking one zone (if no fault is present)
always results in three-phase tripping. Unblocking one
zone is not possible if the tripping type is set to one-phase.
2-41
EPAC 3100/3500
MS/M 1.6882-C
X
X
∆X
Power swing boundary
∆X
Power swing boundary
Z4
Z4
Z3
Z2
Z2
Z1
Z1
∆R
∆R
Z3
R
Z5
Zone 3 reverse
Limit of
start-up
characteristic
R
Z5
Limit of
start-up
characteristic
Zone 3 forward
∆R = ∆X = Settable power swing boundary Ω/loop
Figure 2.3x: Power swing characteristics
When the line isolation function is used, only the apparent distance of the power swing should
be taken into account and not its resistance. The resistance values of zones 1, 2 and 3 are
therefore increased to that of the start-up characteristic.
Tripping logic
If an impedance point crosses the limit between the power swing band and the start-up
characteristic, a adjustable time delay is initialised.
If the impedance point moves out of the start-up characteristic again before the time delay
expires, no trip is activated and the adjustable time delay is reinitialised.
If the impedance point still remains within the start-up characteristic, a three-phase trip command
is sent.
Unblocking the Zones Blocked due to Power swing
In order to protect the network against a fault that may occur during power swing, blocking
signals can be inhibited when the determined current thresholds are exceeded. The adjustable
unblocking criteria are:
-
a residual current threshold: Ir > 0.1 In + kr.Imax (allows earth fault detection during powerswing),
100
a negative-sequence current threshold: I2 > 0.1 In + ki.Imax (allows isolated fault detection
during power-swing),
100
a phase current threshold: I1> (allows 3-phase fault detection during power-swing).
where:
- kr, ki: adjustable coefficients in %,
- Imax: maximum current detected on one phase,
- In: nominal current.
When unblocking occurs during power swing, the independent zone 1 function may either be blocked or left
unblocked. If zone 1 is selected independent, the teleprotection messages are taken into account in a specific way,
as shown in Figures 2.3y and 2.3z.
2-41
EPAC 3100/3500
MS/M 1.6882-C
X
X
∆X
Power swing boundary
∆X
Power swing boundary
Z4
Z4
Z3
Z2
Z2
Z1
Z1
∆R
∆R
Z3
R
Z5
Zone 3 reverse
Limit of
start-up
characteristic
R
Z5
Limit of
start-up
characteristic
Zone 3 forward
∆R = ∆X = Settable power swing boundary Ω/loop
Figure 2.3x: Power swing characteristics
When the line isolation function is used, only the apparent distance of the power swing should
be taken into account and not its resistance. The resistance values of zones 1, 2 and 3 are
therefore increased to that of the start-up characteristic.
Tripping logic
If an impedance point crosses the limit between the power swing band and the start-up
characteristic, a adjustable time delay is initialised.
If the impedance point moves out of the start-up characteristic again before the time delay
expires, no trip is activated and the adjustable time delay is reinitialised.
If the impedance point still remains within the start-up characteristic, a three-phase trip command
is sent.
Unblocking the Zones Blocked due to Power swing
In order to protect the network against a fault that may occur during power swing, blocking
signals can be inhibited when the determined current thresholds are exceeded. The adjustable
unblocking criteria are:
-
a residual current threshold: Ir > 0.1 In + kr.Imax (allows earth fault detection during powerswing),
100
a negative-sequence current threshold: I2 > 0.1 In + ki.Imax (allows isolated fault detection
during power-swing),
100
a phase current threshold: I1> (allows 3-phase fault detection during power-swing).
where:
- kr, ki: adjustable coefficients in %,
- Imax: maximum current detected on one phase,
- In: nominal current.
When unblocking occurs during power swing, the independent zone 1 function may either be blocked or left
unblocked. If zone 1 is selected independent, the teleprotection messages are taken into account in a specific way,
as shown in Figures 2.3y and 2.3z.
2-42
EPAC 3100/3500
MS/M 1.6882-C
2.3.8.4. Fault Detection after Single-phase Tripping (one pole open condition)
After a circuit breaker pole has opened, there is no current and voltage on the applicable phase,
which allows the protection unit to detect a one-pole cycle if the voltage transformers are on the
line side.
The reception of "Poles discrepancy" input signal allows the protection unit to detect a one pole
open condition blocking if the voltage transformers are on a busbar side.
If another fault appears during a one-pole open cycle or just after the voltage has been restored
on the applicable phase, the protection defines a direction and phase selection, then a tripping
command is issued.
If the protection is configured so as to operate in the
teleprotection mode and if a fault occurs during a singlephase cycle, then the teleaction messages are processed in
a specific way, as shown in figures 2.3y and 2.3z.
Blocking
Forward
fault
&
Step 1time-delay
& transmission
time-delay
&
Step 2
time-delay
Tripping
1
Step 5
time-delay
Reverse
fault
Forward
fault
Blocking
Figure 2.3y: Blocking teleaction during a single-phase cycle
(or during unblocking while power swing is present)
Authorisation
Forward
fault
Reverse
fault
Forward
fault
&
Step 1
time-delay
&
Step 2
time-delay
Tripping
1
Step 5
time-delay
Authorisation
Figure 2.3z: Permissive or acceleration teleaction during a single-phase cycle
(or during unblocking while power swing is present)
2-43
EPAC 3100/3500
MS/M 1.6882-C
2.3.8.5. Fuse Failure Detection and emergency overcurrent protection
1) FF detection:
The EPAC monitors the condition of the voltage transformer fuses. If one fuse is no longer
serviceable, then the EPAC does the following:
-
inhibits any tripping by the protection function,
-
if the fuse failure indication is still present when the configurable time delay expires, a
confirmed fuse failure alarm is issued.
Line Fuse Failure
The fuse failure information may be obtained from:
-
a fuse failure external signal coming from an MCB "Mini Circuit breaker",
-
the internal calculation of the line current and voltage characteristics equation, i.e. if:
. the residual voltage Vr is above a predefined threshold of 0.75.Vn,
. the zero- and negative-sequence currents I0 and I2 are below a detection threshold,
. the line current is below a fixed Imax threshold of 2.5 In.
The overall equation for detecting fuse failure is:
Fuse failure = (FFext + Vr).I0.I2.Imax
where: FFext = external fuse failure signal
Imax = I<Imax
If no external signal is received and the configurable time
delay has not yet expired, three current thresholds (negative-sequence, zero-sequence and phase current) unblock
the protection if a fault is present. The negative-sequence
and zero-sequence current thresholds can be adjusted, the
maximum current threshold is non-settable and corresponds to 2.5 In.
Busbar Fuse Failure
Notification of a busbar fuse failure can only come via an external signal. When the signal
is validated, the reclosing cycles associated with the synchro-check function are disabled, i.e.
the function stops issuing any reclosing authorisation signals.
If the synchro-check function is in loopback mode and the circuit breaker associated with the
protection relay is closed, a "voltage fault by synchro-check" output signal is given if the
busbar voltage differs from the line voltage for more than 20 s.
2-44
EPAC 3100/3500
MS/M 1.6882-C
Indication of Confirmed Fuse Failure
An alarm indicates that a fuse failure has been detected. The alarm is instantaneous if an
external line or busbar fuse failure signal is received. There is a time delay if a line fuse failure
is detected as a result an internal EPAC calculation. The delay can be set to between 1 s and
20 s. If this time delay exceeds the maximum length for a one pole open condition, the tripping
logic associated with fuse failure during a one pole open condition need not be applied.
The presence of a fuse failure indication validates the confirmed fuse failure signal.
After fuse failure detection, the indication remains until the following conditions are met:
-
no line fuse failure is detected by internal or external means and no busbar fuse failure
is detected,
-
the line is open or the network is considered to be healthy.
Fault Detection during Confirmed Line Fuse Failure: emergency overcurrent protection
When a fuse failure is confirmed, the following protection functions are blocked:
-
weak infeed,
-
distance protection,
-
overcurrent start-up,
-
DEF and associated back-up protection,
-
power-swing,
-
under- and over-voltage protection,
-
synchrocheck,
-
sensitive directional earth fault protection.
2) An additional protection function, based on current thresholds and associated time delays,
is used to handle any faults occurring during a confirmed fuse failure. The thresholds and time
delays are:
-
an Ifus> high current threshold and an Ifus>> very high current threshold for the phase
current, associated with time delays Tfus> and Tfus>>,
-
an Ifr> current threshold for the residual current, associated with a Tfr> time delay.
The "Blocking Protection" digital input blocks this protection function. This input is either external or is received via
VDEW.
Start-Up
The protection function is activated when one of the following conditions is confirmed:
-
the maximum value of the derivative of one of the phase currents is greater than one of
the phase current thresholds,
-
the maximum value of the residual current derivative is greater than the residual current
threshold.
A hysteresis of 5% deactivates the protection start-up.
2-45
EPAC 3100/3500
MS/M 1.6882-C
Tripping Logic
If the duration of a threshold overreach is longer than the associated time delay, a command
is issued for a three-phase trip.
I phase
Ifus>
Trip
Ifus>>
No trip
t
Tfus>
Tfus>>
Figure 2.3aa: Tripping Logic for Phase Currents
IR
Trip
Ifr>
No trip
t
Tfr>
Figure 2.3ab: Tripping Logic for Residual Current
Phase Selection
Phase selection occurs at protection start-up on overreach of the Ifus> or Ifus>> threshold. No
phase selection occurs if the protection is activated on overreach of the Ifr> threshold alone.
Operation with an Auto-Recloser
The auto-recloser can be blocked after tripping on overreach of the Ifus>, Ifus>> or Ifr
threshold during a confirmed fuse failure.
If the auto-recloser is not blocked, the reclosing cycles used are those defined for backup
protection trips.
If the synchro-check function has been activated for three-phase high- and low-speed cycles,
automatic reclosing is enabled if:
-
the authorisation conditions are met on the reference phase of the synchro-check function,
-
the external line or busbar fuse failure signal is invalid.
2-46
EPAC 3100/3500
MS/M 1.6882-C
3) Fault Detection during Unconfirmed Line Fuse Failure
A line fuse failure is considered to be unconfirmed if it has been detected internally and the
signal time delay has not yet expired. If one of the following faults is detected in such a
situation, the EPAC protection functions are unblocked and the protection will trip.
Fault type
Associated threshold
Earth fault
settable I0 zero-sequence current threshold.
Double-phase fault
settable Ii negative-sequence current threshold.
Three-phase fault
fixed Imax threshold.
Reports associated with faults during unconfirmed line fuse
failures indicate the selected phase, the zone and the
direction of the fault but this information needs to be
checked.
Tripping occurs on a fault during an unconfirmed line fuse
failure at the latest on expiry of the step 4 time delay.
Instantaneous
fuse failure
Vn > 0.75 Vn
&
FFext
0
Confirmed fuse failure (TC)
Tc
S
Open line
I 0 < Sc
I2 < Sc
Imax < 2, 5 In
Q
1
&
R
Healthy network
1
Distance
protection
blocked
Sc = Settable current threshold (0.1 In to In)
Tc = Settable confirmation time delay (1 s to 20 s)
Figure 2.3ac: Fuse failure logic
2.3.8.6. Power Transformer Energizing (inrush current)
This protection serves to avoid the inadvertent tripping of the circuit breaker when closing-on
a transformer which makes major demands on the current (also known as "inrush current"). For
this purpose, the fundamental and the harmonic 2 of currents IA, IB et IC are measured. If a current
harmonic is found to be higher than 0.25 times the fundamental, the circuit breaker was closed
while the power transformer was energizing. In this case, tripping by the EPAC relay is blocked.
2.3.8.7. Switch-On-To-Fault protection (SOTF) and Trip-On-Reclose (TOR)
This protection is used to protect against the effects of reclosing on to fault. To this end, it must:
-
detect any transition that indicates circuit breaker closing,
-
detect any closing on to fault,
-
provoke three-phase tripping if a fault is detected after closing.
2-47
EPAC 3100/3500
MS/M 1.6882-C
Detection of a transition that indicates closing
To keep track of the line condition, the current and voltage amplitudes are monitored separately
phase per phase. If currents are lower than 0.2 In and voltages are lower than 0.7 Vn, the circuit
breaker is considered to be open. Transition is detected when currents or voltages exceed either
of these thresholds.
Vn
T (transition)
0.7
0.2
In
Detection of Closing on a Fault
A closing operation is called "closing on fault" if one of the two following conditions is
confirmed:
-
one of the phase currents exceeds the configurable fault detection current threshold,
-
one loop is convergent inside the start-up characteristic.
I > I threshold
&
*
Closing or reclosing
circuit breaker
Line opened
Transition detection
500ms
&
Closing
160ms
1
1
3-phase
trip
Convergence
Start-up protection
&
&
Harmonic 2
detection
Figure 2.3ad: Protection against closing on fault
During a closing operation, if the protection detects a
current higher than the adjustable tripping current (I > I
threshold), three-phase tripping is ordered without monitoring the Inrush Current.
logic
*: External
input (TS)
2-48
EPAC 3100/3500
MS/M 1.6882-C
2.3.8.8. Double circuit lines
Double circuit lines must be taken into account in the operating principle of the protection scheme
to avoid unwanted tripping of “sound” phases which could be the result of an excessively
general phase selection.
Phase selection for an inter-circuit fault
During the two-phase selection, for instance on loop AB, the EPAC makes a directional
measurement on the two adjacent loops (AN and BN). The directional is measured by the
conventional method and by using superimposed quantities. For this purpose, the energy is
summated phase by phase.
Sa = Σ (∆Va.∆Ia)
and
Sb = Σ (∆Vb.∆Ib)
If the two directionals are forward, the fault is a two-phase fault on the protected line.
If only one of the directionals is forward, for instance Sa, the fault is a single-phase AN on the
protected line.
If the two directionals are reverse, the fault does not concern the protected line.
Protection against Current Reversal guard
When a fault occurs on a line adjacent to a double line, the fault current on the unaffected line
may be reversed due to sequential opening of the circuit breakers located at both the ends of
the line with the fault. This is shown in figure 2.3ac. Due to this current reversal, the protection
directionals may be reversed non-simultaneously. So that for a short period, both directionals
may be forward, which could lead to spurious tripping.
The EPAC provides protection against the effects of this phenomenon in the following manner:
for a adjustable time-delay after the directional changeover from reverse to forward, the
acceleration and permissive messages are not taken into account. This provides protection
against fault current reversal and ensures fast tripping in the event of faults occurring in zone
1, if the latter is independent. During this time delay, the EPAC does not send acceleration or
permissive messages.
2-49
EPAC 3100/3500
MS/M 1.6882-C
PA
Fault I
Fault I
Reverse fault observed
by PA protection relay
PA
Fault I
Forward fault observed
by PA protection relay
Figure 2.3ae: Directional Reversal on an Unaffected Line
2.3.9.
Input-Output Logic Functions
Distance protection
Power swing detection
Power swing detected
&
Current > thresholds for fault
detection during power swing
Power swing
Fuse failure
Fault current detected
Line fuse failure detected
Fault current detected
*
* Busbar fuse failure
Line fuse failure
&
1
&
Fuse failure
confirmed
logic
*: External
input (TS)
: External input (TS)
or internal logic
2-50
EPAC 3100/3500
MS/M 1.6882-C
Auto-recloser blocking
Step 2 time delay expired
Step 2 auto-recl. block request
&
Step 3 time delay expired
Step 3 auto-recl. block request
&
Step 4 time delay expired
Step 4 auto-recl. block request
&
Step 5 time delay expired
Step 5 auto-recl. block request
&
T> time delay expired
I> auto-recl. block request
&
T>> time delay expired
I>> auto-recl. block request
&
DEF backup protection
emerg. overcurrent protection
Recl. block request by backup prot.
&
1
Auto-recloser
blocking
Umax protection trip
Umin protection trip
*
Low pressure
*
Reclosing impossible
Trip command maintained far too long
One-phase trip (phase A)
Phase A tripped
One-phase trip (phase B)
Phase B tripped
One-phase trip (phase C)
Phase C tripped
logic
*: External
input (TS)
300ms
: External input (TS)
or internal logic
2-51
EPAC 3100/3500
MS/M 1.6882-C
Three-phase trip
Phase A trip
&
Phase B trip
Three-phase trip
Phase C trip
Distance Protection Start-up
Convergence of one of the 6 loops
Phase selection valid
Zone
Zone
Zone
Zone
Zone
1
2
3
4
5
&
fault
fault
fault
fault
fault
1
Start-up
Forward directional
Fault appears forward of the protection
Reverse directional
Reverse current fault appears
Phase A selection
Phase A faulty
Phase B selection
Phase B faulty
Phase C selection
Phase C faulty
Single-phase fault
Phase A fault
Phase B fault
Phase C fault
&
Phase B fault
Phase A fault
Phase C fault
&
Phase C fault
Phase B fault
Phase A fault
&
1
Single-phase fault
2-52
EPAC 3100/3500
MS/M 1.6882-C
Multi-phase fault
Phase A selected (Phase A fault)
Phase B selected (Phase B fault)
&
Phase A selected (Phase A fault)
Phase C selected (Phase C fault)
&
Phase C selected (Phase C fault)
Phase B selected (Phase B fault)
&
1
Multi-phase fault
Zone 1 fault
Fault appears in Zone 1
1
Fault appears in
extended Zone 1
&
Zone 1 fault
Trip
Zone 2 fault
Fault appears in Zone 2
Trip
&
Zone 2 fault
&
Zone 3 fault
&
Zone 4 fault
Zone 3 fault
Fault appears in Zone 3
Trip
Zone 4 fault
Fault appears in Zone 4
Trip
Zone 5 (reverse) fault
Fault appears in Zone 5
Trip
&
Zone 5 fault
2-53
EPAC 3100/3500
MS/M 1.6882-C
Carrier send
Teleaction command sent after an isolation fault
Set for teleaction command
transmission zone 1
Set for teleaction command
transmission zones 1 and 2
1
&
Fault in zone 1
Reversal directional guard time delay
Teleaction command transmission
zones 1 and 2
&
1
Fault in zone 2
Convergence of one of the 6 loops
Fault in zone 5
Teleaction
command
sent
1
Teleaction command transmission
zone 5
&
Fault in reverse zone
Teleaction command sent after a fault during a one pole open condition
Set for teleaction command
transmission zone 1
1
Set for teleaction command
transmission zones 1 and 2
Reversal directional guard time delay
Forward fault
Convergence of one of the 6 loops
&
&
1
Convergence of one of the 6 loops
Fault in zone 5
Teleaction command
transmission zone 5
Fault in reverse zone
1
Teleaction
command
set
&
Transmission of unblocking signal
No teleaction command sent
Transmission of teleaction command for tee line
Teleaction command sent for tee line after isolation fault or during one pole open
condition
2-54
EPAC 3100/3500
MS/M 1.6882-C
Transmission of unblocking signal for tee line
No teleaction command sent for tee line
Earth fault
Zero-sequence current detected
Weak-infeed
Teleaction command sent
signal received
* TeleactionProtection
start-up
&
Fault detected in reverse zone
Teleaction
command
sent
Unblocking signal sent
signal received
* TeleactionProtection
start-up
&
Unblocking
signal sent
Fault detected in reverse zone
Teleaction command sent for tee line
Teleaction signal
*received
for tee line
Protection start-up
&
Fault detected in reverse zone
Teleaction command
sent for tee line
Unblocking signal sent for tee line
Teleaction signal
*received
for tee line
Protection start-up
Fault detected in reverse zone
&
Unblocking signal
sent for tee line
logic
*: External
input (TS)
: External input (TS)
or internal logic
2-55
EPAC 3100/3500
MS/M 1.6882-C
Phase A selection
Voltage drop detected on phase A
Phase B selection
Voltage drop detected on phase B
Phase C selection
Voltage drop detected on phase C
Single-phase fault
Phase A fault
Phase B fault
Phase C fault
&
Phase B fault
Phase A fault
Phase C fault
&
Phase C fault
Phase B fault
Phase A fault
&
1
Single-phase fault
Multi-phase fault
Phase A selected (Phase A fault)
Phase B selected (Phase B fault)
&
Phase A selected (Phase A fault)
Phase C selected (Phase C fault)
&
Phase C selected (Phase C fault)
Phase B selected (Phase B fault)
&
Weak infeed trip
Tripping by weak infeed function
1
Multi-phase fault
2-56
EPAC 3100/3500
2.4.
MS/M 1.6882-C
DISTANCE PROTECTION FOR NETWORKS WITH INSULATED OR IMPEDANT NEUTRAL (RNI
OPTION)
The RNI module allows the characteristics of the phase-to-earth faults to be considered when the
neutral is insulated or grounded by an impedance or a Petersen coil. As a matter of fact, such
faults cannot always be correctly processed by standard distance protections. The RNI module
makes a difference between single phase-to-earth faults and double phase-to-earth faults which
have different effect on the electrical network.
The directional of a single-phase fault on this type of network is determined by the Sensitive
Directional Earth Fault function which complements the RNI function (described in paragraph
2.4.3).
Tripping on a fault by the RNI option is always three-phase.
Single Phase-to-Earth Fault
As shown in figure 2.4a, the typical voltage triangle is not immediately affected by a single
phase-to-earth fault; therefore the associated circuit breaker does not need to be opened quickly.
In this case, the RNI module proceeds as follows:
-
It indicates that the single fault has occurred,
-
If the fault remains after a 0 to 360 second configurable time delay, the circuit breaker is
tripped in three phases.
VA = 0
Earth
VA
U CA
Earth
U AB
U CA
-Vo
U BA
VB
VC
U BC
UBC
Before a fault
After a fault
Figure 2.4a: Single Phase-to-Earth Fault - Impedant Neutral
Double Phase-to-Earth Fault
The double phase-to-earth faults are created by a single phase-to-earth fault which generates
another phase-to-earth fault by the "Cross country" phenomenon.
It is important to protect against such faults because they change the voltage triangle and affect
the electrical network balance. In such cases, the RNI module is in charge of opening one of
the two lines affected by the fault according to their convergence in the zone characteristic and
to the type and direction of the fault.
2-57
EPAC 3100/3500
MS/M 1.6882-C
2.4.1.
Fault Analysis by the RNI Module
When a fault is detected, the residual current and voltage are compared to thresholds. Fault
processing therefore depends on threshold overreaches.
The residual voltage threshold, Vr, is constant and configurable from 0.1 Vn to Vn. The residual
current threshold, Ir, varies according to the value of the highest phase current in compliance
with the curve shown in figure 2.4b.
Residual
current
α
Ir threshold
a
Highest phase
current
Where :
α = 12°
0.2In < Ir threshold < 5In
a = In
Figure 2.4b: Residual Current Threshold
2.4.1.1. If the residual voltage is not higher than the Vr threshold
An isolated fault is (two-phase without earth) present. In this case, the "fast" algorithm attempts
to select a phase and to define a directional.
2.4.1.2. If the residual voltage is higher than the Vr threshold and if the zero-sequence current is higher
than the Ir threshold
A double fault ("cross-country") is present. In this case:
-
the RNI module selects the faulty phase,
-
the fault direction is defined by the "Conventional" algorithms.
2.4.1.3. If the residual voltage is higher than the Vr threshold and if the zero-sequence current is lower
than the Ir threshold
An earth fault is present. Phase selection is carried out by the detection of insufficient current on
one of the phases.
The protection device only trips if the fault is still present after a adjustable time delay for singlephase fault trips.
2-58
EPAC 3100/3500
2.4.2.
MS/M 1.6882-C
Phase Selection by the RNI Module
The RNI module selects a phase according to the following criteria:
-
the fault analysis,
-
the measurement loop convergence in the start-up characteristic,
-
the single-phase and two-phase apparent resistances,
-
the phase directionals.
If the fault is single-phase, the directional is provided by the
zero sequence power function described in section 2.4.3.
2.4.2.1. Loop selection criterion
The following tables show the phase selection possibilities for the three types of faults that can
be detected by the RNI module. The loop variables have been introduced for convenience:
X, Y and Z
: can be any one of the three single-phase loops,
XY, XZ and YZ
: can be any one of the three two-phase loops,
Rx, Ry and Rz
: can be any one of the single-phase apparent resistances,
Rxy, Rxz and Ryz : can be any one of the two-phase apparent resistances,
Directional (X)
: can be the directional of a single-phase,
Directional (XY)
: can be the directional of a two-phase loop.
In some cases, these tables refer to the table 2.4f. Table 2.4f corresponds to a phase selection
where the convergent loops have opposite directionals and therefore indicate that the faults are
present in the forward or backward zone of the circuit breaker. When this type of fault occurs,
the EPAC must be able, in some cases, to isolate only one of the faults. The choice of the phase(s)
to be selected depends on a configurable priority criterion which defines the priority between
the different phases.
When a single-phase fault is present, the phase selection is determined by the voltage missing
on one phase. The relay does not trip, except if the fault duration is longer than the adjustable
"tripping time delay" (from 1 s to 360 s).
2-59
EPAC 3100/3500
MS/M 1.6882-C
If the residual voltage is not higher than the Vr threshold
Convergent loops
Resistance conditions
Fault type / Phase selection
Three two-phase and
Three single-phase
or
Rxy < Rxyz
Ryz < Rxyz
Rxz < Rxyz
Three-phase fault (refer to table)
at least two two-phase
XY and YZ
2Rxy < Ryz
AND
2Rxy < Rxz
Two-phase XY fault (refer to table)
Rz > 2Rx
Rz > 2Ry
Two-phase XY fault
otherwise
Three-phase fault
only one two-phase XY
-
Two-phase XY fault
One single-phase X
-
no selection
Table 2.4c: RNI Phase Selection if V < Vr
If the residual voltage is higher than the Vr threshold and the residual current is higher than the
Ir threshold
Convergent loops
Directional or
resistance
conditions
Fault type /
Phase selection
No two-phase
dir (X) = dir (Y) = dir (Z)
No selection
and
three single-phase XYZ
different directionals
Three single-phase faults
(refer to table)
No two-phase
and one single-phase X
Single-phase X fault
One or more
two-phase including XY
and two single-phase
X and Y
dir (X) = dir (Y) = dir (XY)
Two-phase XY fault
(refer to table)
No,
one or several two-phase
+ two single-phase X,Y
dir (X) ≠ dir (Y)
Two-phase XY fault
(refer table)
One or more two-phase
2Rxy < Rxz dir (X) ≠ dir (Y)
Two single-phase faults
(refer table)
including XY
2Rxy < Ryz dir (X) =dir (Y) = dir (XY) One single-phase fault
and one two-phase fault
(refer table)
One or more two-phase
Rz > 2Rx
dir (X) ≠ dir (Y)
including XY
Rz > 2Ry
dir (X) =dir (Y) = dir (XY) Two-phase XY fault
(refer table)
Two single-phase faults
(refer table)
Table 2.4d: RNI Phase Selection if V > Vr and I > Ir
2-60
EPAC 3100/3500
MS/M 1.6882-C
If the residual voltage is higher than the Vr threshold and the residual current is lower than the
Ir threshold
Convergent
loops
Voltage
conditions
Resistance
conditions
No two-phase
and only 1
single-phase X
No two-phase
No single-phase
Fault type
Phase selection
single-phase X fault
Vx < V threshold
Vy > V threshold
Vz > V threshold
single-phase X fault
Two-phase XY
and only X and Y
two-phase X fault
XY, YZ, XZ
Rxy < Rxyz
Ryz < Rxyz
Rxz < Rxyz
three-phase fault
Two-phase XY
2Rxy < Rxz
2Rxy < Ryz
two-phase XY fault
Two-phase XY
Rz > 2Ry
Rz > 2Rx
two-phase XY fault
Otherwise
three-phase fault
Table 2.4e: RNI Phase Selection if V > Vr and I < Ir
Criterion
Priority
A(C) acyclic
A before C before B
C(A) acyclic
C before A before B
A(B) acyclic
A before B before C
B(A) acyclic
B before A before C
B(C) acyclic
B before C before A
A(C) cyclic
A before C before B before A
C(A) cyclic
C before A before B before C
2-61
EPAC 3100/3500
MS/M 1.6882-C
Priority criterion
Convergent loops
Selected phase(s)
C(A) acyclic
AN, BN
BN, CN
CN, AN
AN, BN, CN
AB, BC, CA
AN
CN
CN
CN
CA
A(C) acyclic
AN, BN
BN, CN
CN, AN
AN, BN, CN
AB, BC, CA
AN
CN
AN
AN
CA
B(A) acyclic
AN, BN
BN, CN
CN, AN
AN, BN, CN
AB, BC, CA
BN
BN
AN
BN
AB
A(B) acyclic
AN, BN
BN, CN
CN, AN
AN, BN, CN
AB, BC, CA
AN
BN
AN
AN
AB
C(B) acyclic
AN, BN
BN, CN
CN, AN
AN, BN, CN
AB, BC, CA
BN
CN
CN
CN
BC
B(C) acyclic
AN, BN
BN, CN
CN, AN
AN, BN, CN
AB, BC, CA
BN
BN
CN
BN
BC
C(A) cyclic
AN, BN
BN, CN
CN, AN
AN, BN, CN
AB, BC, CA
AN
BN
CN
CN
CA
A(C) cyclic
AN, BN
BN, CN
CN, AN
AN, BN, CN
AB, BC, CA
BN
VN
AN
AN
CA
Table 2.4f: Phase Selection Criteria
2-62
EPAC 3100/3500
2.4.3.
MS/M 1.6882-C
Sensitive Directional Earth Fault Protection on Insulated or Impedant Neutral Networks
This function complements the RNI function and handles single-phase faults on insulated or
impedant neutral networks. It combines three different functions:
-
detection of the zero-sequence directional, to determine the direction of a single-phase fault,
-
management of transient single-phase auto-start faults which can be considered as true faults,
-
management of fault detection and forward or reverse directional detection signals and their
associated time delays.
2.4.3.1. Detection of a Sensitive Directional Earth Fault
This function enables the zero-sequence directional of a single-phase fault to be determined on
the basis of:
-
the measured zero-sequence current,
-
the zero-sequence voltage calculated by adding together the three phase voltages (the phase
voltages halves in fact, to prevent saturation).
Current direction is based on the calculated residual active and apparent power and the
comparison of these values with settable thresholds. A correction is made for the lag between
zero-sequence current and zero-sequence voltage before these power values are calculated.
Correction for Lag between Zero-Sequence Current and Zero-Sequence Voltage
The function determining the zero-sequence directional corrects simultaneously the phase angles
that can be introduced by three elements in the measurement system. These angles are:
-
the phase angle that can be created by the CT core measuring the zero-sequence current,
between the current of the primary winding and that of the secondary winding,
-
the phase angle of the tripping characteristic between the residual voltage and the residual
current,
-
the phase angle between the residual voltage and the residual current due to the analogdigital converter.
Primary CT Core Angle
The fact that the primary CT core angle is taken into account in power calculations means that
the EPAC can be used with almost all types of CT cores.
The primary CT core angle is determined by comparing the zero-sequence current with:
-
an I2 current threshold for the secondary winding, on the basis of which the φ2 angle can
be regarded as constant,
-
an I1 current threshold for the secondary winding, which gives a maximum φ1 primary CT
core angle.
2-63
EPAC 3100/3500
MS/M 1.6882-C
If the measured current is above the I2 threshold, the angle is regarded as being constant and
equal to φ2. If it is between I1 and I2, the CT core angle is regarded as being linear, between
φ1 and φ2.
φ
Phase angle =
φ1
(φ1 - φ2). I (φ2.I1 - φ1.I2)
+
(I1 - I2)
(I1 - I2)
Phase angle = φ2
φ2
I1
I
I2
Figure 2.4g: Characteristic for the Zero-Sequence Directional
Angle of the Tripping Characteristic
Setting this angle enables the neutral earthing characteristic to be taken into account on RNI
networks. The angle can be set between -180° and +180°. For instance, the angle for insulated
or impedant neutral networks is 90° while that for networks with a Petersen coil it is 0°.
Ir
φ
Vr
Figure 2.4h: Angle of the Tripping Characteristic
Directional Detection Logic
The logic for directional detection is based on the calculated residual active power (Pr) and
residual apparent power (Sr) and comparison of these values with settable thresholds.
Residual active power
Pr = Ureff.Ireff.cos (φ)
Residual apparent power
Sr = Ureff.Ireff
The Pr/Ir ratio indicates the direction of transit of the fault current and hence the fault current
direction. Faults are considered to be forward if the residual active power Pr is negative, as the
movement of the residual current is from the fault towards the protection.
The power values are calculated after correction for lags. They are calculated only if the absolute
zero-sequence voltage and zero-sequence current values are above certain settable thresholds:
Zero-sequence voltage
|Vr| > V threshold
Zero-sequence current
|Ir| > I threshold
2-64
EPAC 3100/3500
MS/M 1.6882-C
Characteristic for the Zero-Sequence Directional
The residual active and apparent power thresholds define the characteristic for the zerosequence directional. The characteristic defines the power limits and the direction of any zerosequence fault.
Residual active power threshold:
SW = K.I threshold l.V threshold
Apparent power threshold:
S threshold = |Pr| / cos(87°)
The direction of a single-phase fault is forward if:
Pr < - SW and Sr <= S threshold
The direction of a single-phase fault is reverse if:
Pr > SW and Sr <= S threshold
Pr > SW Reverse directional
Pr
87°
SW
IrS
--SW
Pr < --SW Forward directional
Figure 2.4i: Characteristic for the Zero-Sequence Directional
The residual active power threshold has a hysteresis of
5 %. The apparent power threshold has a hysteresis of
+ 0.5°.
Inhibition of directional detection during a fault condition
Detection is inhibited for 400 ms if, during the 100 ms preceding the detection of a directional,
a directional in the opposite direction was detected.
A power detection threshold of 0.1 SW is used to detect
directional reversal.
2-65
EPAC 3100/3500
MS/M 1.6882-C
Examples
Pr
SW
--SW
t
100 ms
Instantaneous
forward directional
t
400 ms
Instantaneous
reverse directional
t
Directional
with time delay
FORWARD
t
Figure 2.4j: Inhibition after Detection of a Forward Directional
Pr
SW
t
--0,1 SW
--SW
100 ms
Instantaneous
reverse directional
400 ms
t
Directional
with time delay
t
Figure 2.4k: Inhibition after Overreach of a Low Detection Threshold
2.4.3.2. Single-Phase Auto-Start Faults
This function enables single-phase auto-start (intermittent) faults to be treated like permanent
faults. An auto-start fault is one that disappears and reappears periodically. A time delay
determines the maximum length of time between two auto-start faults for them to be considered
to constitute a single permanent fault.
2-66
EPAC 3100/3500
MS/M 1.6882-C
On disappearance of a single-phase fault:
-
an auto-start time delay (Trall) is activated,
-
the data concerning the directional, the phase selection and the presence of a single-phase
fault are stored in memory.
If a single-phase fault reappears in the same direction before expiry of the Trall time delay, the
data stored in memory are kept.
-Pr>SW
Instantaneous
forward
<Trall
<Trall
<Trall
<Trall
Figure 2.4l: Management of Auto-Start Faults
2.4.3.3. Signals with Time Delays
This function enables time delays to be associated with the following digital outputs:
-
delayed forwards earth fault,
-
delayed backwards earth fault.
A Ttempo time delay is activated on appearance of a permanent fault (or an auto-start fault
considered as a permanent fault as a result of its reoccurrence before expiry of the Trall time
delay). If the fault is still present on expiry of the time delay, the "permanent earth fault" DI is
validated.
The "delayed forward (or backwards) earth fault " output is likewise only asserted if the
directional is present for longer than the Trall time delay.
The "phase (A,B or C) selection" output is maintained for
as long as the single-phase fault is present.
2-67
EPAC 3100/3500
MS/M 1.6882-C
t<Time delay
Single-phase
fault
Time delay
T>Trall
Earth fault
with time delay
Phase
selection
t<Time delay
Time delay
Instantaneous
forward
Directional
with time delay
Forward
Figure 2.4m: Signals with time delays
2.4.4.
Associated Inputs/Outputs
Output name
Meaning
Single phase fault
Single-phase fault
Earth fault
Permanent earth fault
Phase selection (A, B or C)
Faulty phase selected
Delayed forwards earth fault
Indication of fault downstream of the protection device,
with associated time delay
Delayed backwards earth fault
Indication of fault upstream of the protection device,
with associated time delay
Forward directional
Fault downstream of the protection device
(instantaneous directional)
Reverse directional
Fault upstream of the protection device (instantaneous
directional)
2-68
EPAC 3100/3500
MS/M 1.6882-C
2.5.
COMPLEMENTARY PROTECTION DEVICES
2.5.1.
DEF Protection Against High Resistance Earth Faults
Protection against high resistance earth faults, also called DEF, is used to protect the electrical
network against very resistive faults. In fact, a very resistive fault is usually not correctly detected
by distance protection. Protection against high resistance earth faults uses the following:
-
in main operating mode, a directional comparison protection,
-
in backup operating mode, an inverse time overcurrent protection or an inverse time zerosequence power protection. The protection to be selected in backup mode is configurable.
These protection devices use the same results to detect the fault and to define the directional.
On the other hand, only directional comparison protection allows single-phase tripping and
therefore uses the results of the phase selection.
The main operating difference between these protection devices is their tripping logic.
The use of directional comparison protection without
independent signalling channel implies that the function
having priority is the distance protection. In this case, if an
impedance loop converges inside the start-up characteristic, the directional comparison function will be blocked.
The use of directional comparison protection with independent signalling channel implies that
the both functions (directional comparison and distance protections) work in parallel. In this
case, if an impedance loop converges inside the start-up characteristic, the directional
comparison function will not be blocked and the faster of the two functions will perform the trip.
2.5.1.1. High Resistance Earth Fault Detection
A very resistive fault is detected in the following conditions:
-
residual voltage and current thresholds are exceeded,
-
a fault is suspected; 30 ms later, this is confirmed by the exceeding of residual voltage and
current threshold levels.
. ∆ I ≥ 0.05 In
. ∆ U ≥ 0.1 Un/√3
2.5.1.2. Directional determination
The fault direction is determined by measuring the phase-shift between the residual voltage and
the residual current derivative (a band-pass FIR derivator applied to all currents (phase to earth,
phase to phase, residual). The fault is said to be forward if the phase-shift is between -14˚ and
+166˚.
2-69
EPAC 3100/3500
MS/M 1.6882-C
2.5.1.3. Phase selection
The phase is selected in the same way as for distance protection except that the current threshold
is reduced.
If the phase has not been selected within 20 ms, the three
phases are selected automatically.
2.5.1.4. Tripping Logic
Directional Comparison Protection
Directional comparison protection operates in conjunction with two remote end protections. The
teleaction message transmission channels may be the same as those used by the distance
protection or may be independent.
Figures 2.5a to 2.5d show the tripping logic diagrams according to the teleaction channel in
use.
Transmission time delay is valid only if a blocking scheme
is used.
* * Tee line application
Forward
led
Vrd
reversal guard
enc-i
Carrier sent
&
sel_mono
dec_mono
* Reception carrier
lev
Tfon
ms
&
cvmr
zone
*
150
ms
cycle
TS-cycle
Tee line application
*
Reception carrier
Tee line
Carrier sent
Tee line
&
&
Single-phase
tripping
&
Three-phase
tripping
&
sel-bi
dec_tri
no-sel
See legend, page 2-73
logic
*: External
input (TS)
: External input (TS)
or internal logic
Figure 2.5a: Directional comparison protection
permissive scheme
with the same channel
2-70
EPAC 3100/3500
MS/M 1.6882-C
Tee line
application
Forward
led
Vrd
reversal guard
enc-i
&
Trans
piq (ms)
&
Trans
(ms)
sel_mono
dec_mono
lev
&
Three-phase
tripping
sel-bi
dec_tri
150
ms
cycle
* TS-cycle
lev
&
no-sel
cvmr
zone
Reverse
Single-phase
tripping
&
* Reception carrier
Tfon
ns
&
Tee line application
carrier
* Reception
tee line
Carrier sent for blocking scheme
&
Vrd
Tee line application
&
Carrier sent for
blocking scheme and
tee line application
See legend, page 2-73
logic
*: External
input (TS)
: External input (TS)
or internal logic
Figure 2.5b: Directional comparison protection
blocking scheme
with the same channel
2-71
EPAC 3100/3500
MS/M 1.6882-C
Tee line
application
Forward
led
Vrd
reversal guard
enc-i
Carrier sent by DEF
&
sel_mono
dec_mono
*Reception carrier DEF
lev
*
Tfon
ms
&
150
ms
cycle
TS-cycle
Tee line application
*
Carrier sent for
tee line by DEF
&
Reception carrier
tee line DEF
&
Single-phase
tripping
&
Three-phase
tripping
&
sel-bi
dec_tri
no-sel
See legend, page 2-73
logic
*: External
input (TS)
: External input (TS)
or internal logic
Figure 2.5c: Directional comparison protection
permissive scheme
with independent channels
2-72
EPAC 3100/3500
MS/M 1.6882-C
Tee line
application
Forward
led
Vrd
reversal guard
enc-i
&
Tfon
ms
Trans
piq (ms)
Trans
(ms)
sel_mono
dec_mono
&
&
Single-phase
tripping
&
Three-phase
tripping
&
carrier
* Reception
DEF
lev
&
sel-bi
dec_tri
no-sel
*
150
ms
cycle
TS-cycle
Tee line application
carrier
* Reception
tee line DEF
Reverse
lev
Carrier sent for blocking scheme
&
Vrd
Tee line application
&
Carrier sent for
blocking scheme
and tee line application
See legend, page 2-73
logic
*: External
input (TS)
: External input (TS)
or internal logic
Figure 2.5d: Directional comparison protection
blocking scheme
with independent channels
2-73
EPAC 3100/3500
MS/M 1.6882-C
Keys for DEF protection figures
lev
Threshold of residual current for reverse fault (0.6 led)
Tfon
Time delay must be higher than the single-phase cycle in
progress time (adjustable)
Cvmr
Internal starting of the distance protection
Zone_l
Zone measurement carried out by the distance protection
enc_i
Trip by overcurrent due to a reclose on to fault
Cycle
Single-phase detection cycle in progress
TS cycle
Single phase input cycle in progress
forward
Forward directional with zero-sequence component
led
Threshold of residual current for forward fault
Vrd
Threshold of residual voltage
Reversal guard
Reversal guard time
Reverse
Reverse directional with zero-sequence component
Trans
Transmission time delay for blocking scheme
Transpiq.
Transmission time delay for tee line and blocking scheme
Tee line application
Tee line application selected (adjustable)
sel_mono
Single-phase selection
sel_bi
Poly-phase selection
dec_mono
Single-phase tripping by DEF (adjustable)
dec_tri
Three-phase tripping by DEF (adjustable)
no_sel
Phase selection not valid or three-phase tripping authorisation (adjustable)
recep. carrier
Carrier received for the principal line protected (same
channel as distance protection)
recep. carrier tee line
Carrier received for the tee line protected (same channel as
distance protection)
recep. carrier DEF
Carrier received for the main line protected (different
channel of the distance protection)
recep. carrier tee line DEF
Carrier received for the tee line protected (different channelof the distance protection)
Tfon —> 0 :
Time delay before any Iev signal is taken into account
0 —> 150 :
Time delay activated when cycle and TS-cycle signals
disappear
If the operator selects directional comparison transmission on the same channel as is used to
transmit teleaction distance protection messages, the DEF will have the same tripping logic as
the main protection (authorisation or blocking). The check is carried out in the MMI’s. Teleaction
distance protection transmission has priority over that of the DEF directional, which is why the
function is disabled if distance protection is started internally (Cvmr, zone or enc_i).
2-74
EPAC 3100/3500
MS/M 1.6882-C
Directional Inverse Time Overcurrent Protection
This protection trips the associated circuit breaker if a very resistive fault remains after a certain
time delay. The value of this time delay varies in relation with the value of the fault current. The
selectable inverse time curves comply with the IEC and ANSI standards and are given in the
appendix.
The fault is said to be forward if the phase-shift is between -14˚ and +166˚.
This protection trips every time three poles and blocks the autorecloser.
The adjustable time delay Tfon from 0.1 s to 10 s must be
higher than the time of single-phase cycle in progress.
Single-phase
cycle in progress
Ir > Ithreshold
Settable
time delay
Tfon
&
Ir > Ithreshold
Forward fault
&
Ir Inverse time
time-delay
Figure 2.5e: Inverse Time Overcurrent Protection
Three poles
tripping Ir
2-75
EPAC 3100/3500
MS/M 1.6882-C
Inverse Time Directional Zero-sequence Power Protection
The tripping logic of this backup protection relay is very similar to that of the inverse time
overcurrent protection except that tripping occurs only when forward faults are detected.
The value of the time delay varies in relation to the residual voltage and current values according
to the following equation:
Tripping time = 0.2 K. (So/Sr)
where
So = 10 VA
Sr = Ur . Ir
K = configurable coefficient
This protection trips three poles every time and blocks the autorecloser.
The adjustable time delay Tfon from 0.1 s to 10 s must be
higher than the time of single-phase cycle in progress.
Single-phase cycle
in progress
Ir > Ithreshold
Adjustable
time delay
Tfon
&
Forward fault
Ir > Ithreshold
&
Three poles
tripping Po
Po Inverse time
time-delay
Figure 2.5f: Inverse Time Zero-sequence Power Protection
2-76
EPAC 3100/3500
MS/M 1.6882-C
2.5.1.5. Associated Inputs/Outputs
Input name
Meaning
1 phase cycle auto-reclose
Input to indicate a single-phase cycle in progress from
an external autorecloser
Signal receive D.E.F
Reception of a "forward directional" or blocking signal
Signal receive D.E.F Tee line
Reception of a "forward directional" or blocking signal for
Tee line
Output name
Meaning
Directional comparison signal
Transmission of a "forward directional" or "reverse directional" signal
Directional comparison signal
for Tee line
Transmission of a "forward directional" or "reverse
directional" signal for Tee line
D.E.F trip
Tripping by high resistant earth fault protection
2.5.1.6. Logic Functions for DEF Protection
Transmission of directional comparison signal
DEF protection set for
authorisation logic
&
Forward fault detected by
zero-sequence directional
Directional
comparison
signal sent
1
DEF protection set for
blocking logic
&
Reverse fault detected by
zero-sequence directional
Transmission of directional comparison signal for tee line
As above, see tee line condition added
Transmission of teleaction command
Authorisation logic
Forward fault
&
1
Blocking logic
Reverse fault
Independant channels
on Tee line
&
&
Teleaction
command
sent
2-77
EPAC 3100/3500
MS/M 1.6882-C
Transmission of teleaction command for tee line
As above, with tee line condition added
Tripping by high resistance earth fault protection
Tripping by directional comparison protection
Tripping by zero-sequence
current backup protection
or
Tripping by zero-sequence
power backup protection
1
DEF trip
=1
DEF by backup protection (Po or In)
2.5.2.
Overload, Undervoltage, Overvoltage Protection Devices
2.5.2.1. Overload Protection
This protection is additional to the distance protection. It compares the current value on the three
phases to predefined thresholds. If a threshold is exceeded at least on one phase:
-
an alarm is issued,
-
a definite or an inverse time time-delay is initialised. If the overload remains when this time
delay has elapsed, the overload protection trips three poles and blocks the autorecloser.
The overload protection is blocked when the distance protection starts, i.e. when a fault detection
loop converges inside the start-up characteristic.
I
I1
0.9 I1
t < time delay
-> no tripping
-> alarm
t > time delay
-> tripping
-> alarm
-> LED in the front panel
is illuminated.
Figure 2.5g: Overload Protection
The LED Max I in front panel of the product is illuminated
when the relay trips by overload function. It is put off when
other function trips.
The protection is inhibited when the current drops below
0.9 I1.
2-78
EPAC 3100/3500
MS/M 1.6882-C
Inverse Time Delay
This overload protection is referred to as an inverse curve type protection. It is associated to an
ANSI or IEC inverse time curve. Three-phase tripping occurs when a threshold is exceeded for
more than the corresponding time delay on the selected and parametered inverse time curve.
Definite Time Delay
Three adjustable overload thresholds (I1, I2 and I3) are associated with three adjustable time
delays. If at least one of the currents measured is higher than one of the thresholds for the
associated time delay, a three-phase trip command is sent.
Time delay
Value
Threshold
Value
T1
1 to 100 minutes
I1
0.5 In to 2 In
T2
1 to 100 minutes
I2
In to 3 In
T3
1 to 100 seconds
I3
1,3 In to 3 In
The overload protection is not blocked if a fuse failure is
detected.
2.5.2.2. Undervoltage Protection
This protection issues an alarm signal and initiates a time delay when a minimum voltage level
is reached. If at least one of the 3 phase voltages remains below the minimum voltage threshold
once the time delay has elapsed:
-
an alarm is issued,
-
a definite time delay is initiated. If the voltage always remains below the minimum voltage
threshold once the time delay has elapsed, the circuit breaker is tripped.
Tripping time delay
Threshold
from 0 to 20 s in 0.1s steps
from 0,1 VN to 0,6 VN in 0,1 VN steps
The undervoltage protection is locked when the distance protection starts, i.e. when a fault
detection loop converges inside the start-up characteristic.
This protection is only activated if the circuit breaker is closed. The information is given by the
"CB closed " digital input, which is set to 1 if the circuit breaker is closed.
The undervoltage protection is blocked when the voltage
exceeds 1.1 times the minimum voltage value.
The undervoltage protection is blocked when a fuse failure
is detected.
The LED MinU in the front panel of the product is illuminated
when the undervoltage function is tripping. It is put off when
other protection trips.
2-79
EPAC 3100/3500
MS/M 1.6882-C
U
1.1 Uthreshold
Uthreshold
t
t < time delay
-> no tripping
-> alarm
t > time delay
-> tripping
-> alarm
-> LED in the front panel
of the product is illuminated
Figure 2.5h: Undervoltage Protection
2.5.2.3. Overvoltage Protection
This protection issues an alarm signal when at least one of the 3 phase voltages remains upper
the maximum voltage threshold during a predefined time delay. A trip associated with this
protection can be set:
-
with trip: the Max U alarm is issued about 90 ms after detection of a maximum voltage. The
three-phase trip is issued at the end of the time delay,
-
without trip: the Max U alarm is issued at the end of the time delay.
Tripping time delay
Threshold
from 0 to 20 s in 0.1s steps
from 1.1 to 1.4 Vn in 0.1 Vn steps
This protection is blocked when the distance protection starts (1 fault detection loop converges
inside the start-up characteristic).
U
Uthreshold
t
t < time delay
-> no alarm
t > time delay
-> alarm
-> the LED in the front panel
is illuminated
Figure 2.5i: Overvoltage Protection
If the protection is set to "no trip", the front panel LED
Max U is illuminated when at least one voltage exceeds the
adjustable threshold during a time higher than the adjustable time. If the protection is set to "trip", the front panel LED
Max U is illuminated when the circuit breaker is tripped. It
is put off when tripping is issued by an other function.
2-80
EPAC 3100/3500
MS/M 1.6882-C
2.5.2.4. Associated Inputs/Outputs
Input
Meaning
CB closed
Indicates the position of three poles of the circuit breaker
Output
Meaning
MinU alarm
Signal indicating undervoltage tripping
MaxU alarm
Signal indicating line voltage overvoltage
MaxI alarm
Signal indicating overload tripping
2.5.2.5. Logic Functions
MaxU Alarm
At least one of the three
voltages > maximum threshold
MaxU signal time delay expired
Max U trip request
At least one of the three
voltages > maximum threshold
Max U trip request
&
1
MaxU alarm (or trip
if requested)
&
MaxI Alarm
Current above the maximum current threshold detected
MinU Alarm
At least one of the three
voltages < minimum threshold
MinU signal time delay expired
&
MinU trip
2-81
ERRATUM
MS/M 1.6882-C
EPAC 3100/3500
2.6.
AUTO-RECLOSER FUNCTION AND SYNCHRO-CHECK FUNCTION
2.6.1.
Recloser
2.6.1.1 Introduction
The auto-recloser function on some models allows an isolated line to be put back into service
after a fault, without manually operating the open circuit breaker. In fact, a fault on this type of
link is generally transient. It may be corrected by temporarily opening the line circuit breaker
once or several times. The circuit breaker opening time must allow the electric arc generated
by the fault to be deionized.
If the synchronism between the line voltage and the busbar voltage requires to be checked during
a three-pole low-speed reclosing, a voltage monitoring module (synchro-check) may be added
to the EPAC.
2.6.1.2. Reclosing cycles
Each reclosing cycle is an attempt to put a line back into service. There are two types of reclosing
cycle:
-
High-speed cycle:
This cycle is activated at the first trip following a fault. It may be single-phase or three-phase,
depending on the phase(s) tripped and the protection device handling the fault (back-up
protection trip is always three-phase).
-
Low-speed cycle:
This cycle followsthe high-speed cycle. Depending on the parameter setting, it may be
repeated up to three times in succession. The low-speed cycle is always three-phase.
Trip
Tcyc
Tencl
Tbloc
Tcyc = Cycle time delay
Tbloc = Reclaim time
Tencl = Reclosing time
Figure 2.6a: Examples of reclosing cycles
2-82
ERRATUM
MS/M 1.6882-C
EPAC 3100/3500
As can be seen in Figure 2.6a, a reclosing cycle is essentially characterised by three time delays:
-
Dead time: initialised when a trip occurs. This is the minimum length of time for isolating the
line before a closing order can be sent to the circuit breaker. It is always shorter for the highspeed cycle (1st dead time: THSAR) than for the low-speed cycles (further dead times: TDAR).
-
Reclosing time delay: initialised at the end of the dead time and corresponds to the minimum
time for closing the circuit breaker (Trecl.).
-
Circuit breaker reclaim time: also initialised at the end of the dead time. This is the minimum
time for blocking the circuit breaker. If a fault appears during this time delay and the circuit
breaker has been reclosed, the circuit breaker is tripped and:
. if the current cycle is not the last one, the following cycle is initialised,
. if the current cycle is the last one, the trip is definitive (lock-out).
Several situations are possible when a fault appears:
-
if the fault occurs outside the reclosing cycle, a high-speed cycle is activated if the setting
permits,
-
if the fault occurs during a reclaim time, a low-speed cycle is activated if the setting permits.
If not, the order for the definitive three-phase trip is sent.
During a single-pole cycle, the auto-recloser takes no notice
of synchro-check authorisation.
During a three-pole cycle, the setting determines whether
the auto-recloser takes any notice of synchro-check authorisation.
2.6.1.3 Reclosing modes
The reclosing mode used is selected on the basis of:
-
the number of faulty phases,
-
the type of protection detecting the fault.
Characteristics of reclosing modes
Three reclosing modes can be set.
Reclosing after single-pole tripping
This mode applies to single-phase faults detected by the standard distance protection (unless the
latter is set to "three pole trip for all zones" mode), the directional comparison protection (if one
pole tripping is authorised) or by an external protection device. Depending on the setting, the
mode may:
-
be inhibited,
-
consist of a high-speed cycle (single-phase),
-
consist of a high-speed cycle (single-phase) followed by one to three low-speed cycles (threephase).
2-83
ERRATUM
MS/M 1.6882-C
EPAC 3100/3500
Reclosing after three pole tripping
This mode applies to multi-phase faults detected by the standard distance protection, the
directional comparison protection or by an external protection device. Depending on the setting,
the mode may:
-
be inhibited,
-
consist of a high-speed cycle (three-phase),
-
consist of a high-speed cycle (three-phase) followed by one to three low-speed cycles (threephase).
Reclosing after three pole tripping by backup protection relay
This mode applies to multi- or single-phase faults detected by DEF backup protection (inverse time
overcurrent protection and inverse time directional zero-sequence power protection), by the
overcurrent protection or by an external protection device. Depending on the setting, the mode
may:
-
be inhibited,
-
consist of a high-speed cycle (three-phase),
-
consist of a high-speed cycle (three-phase) followed by one to three low-speed cycles (threephase).
Each of these three reclosing modes can be set independently of the other two.
The reclosing signal can come from:
-
the distance protection or the DEF protection, which distinguish between single-phase and
three-phase faults,
-
the zero-sequence backup protection, which alwayscauses a three pole trip.
Operation in parallel of the main protection relay and the backup protection
Backup protection complements the main protection relay. It may be:
-
internal, from the EPAC unit,
-
external, provided by another type of protection.
There are several ways in which the auto-recloser can operate in conjunction with a backup
protection relay:
-
in conjunction with an external protection relay. It is then necessary to wire the trip commands
from the external protection relay to the phase A, B and C tripping inputs of the auto-recloser
element. In this case, the auto-recloser start-up is controlled either by internal protection relay
commands or by digital trip inputs,
-
in conjunction with the auto-recloser of a redundant EPAC protection. In this case, if the
redundant auto-recloser has already been started up, the internal start-up of the EPAC autorecloser can be blocked by reception of an order on the "Reclosing impossible" input. In order
to prevent the cycle overlap, one of the protection relays must have a longer dead time setting
than the other.
2-84
ERRATUM
MS/M 1.6882-C
EPAC 3100/3500
2.6.1.4. Auto-recloser operation according to setting
The following paragraphs describe three typical examples of auto-recloser operation.
Setting: one high-speed cycle only
Figure 2.6b: 1 high-speed cycle authorised
Part 1 of diagram:
1.
A fault occurs in the network. The protection trips ("Trip 1") and the circuit breaker
opening begins.
2.
When the circuit breaker is open, the tripping order is de-energised. Then the highspeed dead time is started ("THSAR").
3.
At the end of high-speed auto-reclose cycle, the reclosing order is initiated during the
time Trecl. and the reclaim time is also activated during Trt.
4.
End of circuit breaker reclosing.
5.
End of reclaim time. No fault has occured during this time delay, the auto-reclose cycle
is successful.
Part 2 of diagram:
1.
A fault occurs in the network. The protection trips ("Trip 1") and the circuit breaker
opening begins.
2.
When the circuit breaker is open, the tripping order is de-energised. Then the highspeed dead time is started "THSAR".
3.
At the end of high-speed AR-cycle, the reclosing order is initiated during the time Trecl.
and the reclaim time is also activated during Trt.
4.
End of circuit breaker reclosing.
5.
A fault occurs during the reclaim time. The setting does not include a delayed autoeclose cycle,the protection tip three pole definitively and the auto-reclose cycle is unsuccessful (terminated).
2-85
ERRATUM
MS/M 1.6882-C
EPAC 3100/3500
Setting: one high-speed cycle and two delayed AR-cycles
Figure 2.6c:1 high-speed cycle + 2 low-speed cycles authorised
1.
A high-speed auto-reclose cycle runs after an initial fault.
2.
A fault is still present after the reclosing of the circuit breaker. The protection trips again
(Trip 2). A first DAR cycle is activated during low speed dead time TDAR.
3.
The fault is detected before expiry of the last permitted cycle's dead time.
4.
A fault occurs during the reclaim time. The setting does not include a delayed autoeclose cycle,the protection tip three pole definitively and the auto-reclose cycle is unsuccessful (terminated).
Setting: parallel operation of distance and backup protections
Figure 2.6d: Parallel operation of main and backup relays
2-86
EPAC 3100/3500
ERRATUM
MS/M 1.6882-C
The auto-recloser is set as follows:
-
on one-phase trip: single-phase/three-phase,
-
on three-phase trip: three-phase,
-
on backup trip: three-phase/three-phase.
1.
A high-speed auto-reclose cycle runs after an initial trip ordered by the backup protection.
2.
A DAR cycle runs after a second trip ordered by the backup protection.
3.
A three-phase fault is detected by the distance protection during the reclaim time associated with the backup protection. A high-speed AR-cycle is activated. The delayed autoreclose cycle activated by the backup protection continues, in parallel.
Several hypotheses are then possible:
2.6.2.
-
A second fault is detected by the distance protection. It occurs before the end of the
time delay associated with the main protection, and the trip is definitive.
-
A third fault is detected by the backup protection. It occurs before the end of the lowspeed reclaim time associated with the backup protection, and the trip is definitive.
-
No fault occurs. The settings of the two auto-reclosers are reinitialised.
Synchro-check
2.6.2.1. Introduction
The role of the synchro-check is to transmit a reclosing authorisation signal, if appropriate, after
a three-phase trip. This authorisation is based on an analysis of line and busbar voltage. The
synchro-check module is not used for single-phase high-speed cycles but may be used for threephase high-speed cycles.
The synchro-check function verifies compatibility between the operating mode set (return,
inversed return or loopback check) and certain conditions on the lines and busbars.
The EPAC synchro-check function is independent of the auto-recloser. The reclosing authorisation signal can therefore be used with an auto-recloser external to the product.
Synchro-check can be:
-
inhibited,
-
operational only on low-speed three-phase cycles,
-
operational on all three-phase cycles.
2-87
EPAC 3100/3500
MS/M 1.6882-C
2.6.2.2. Operating modes
There are four synchro-check operating modes:
Return mode
This mode is used if the EPAC is located on a direct outgoing line.
The synchro-check’s function in return mode is to detect the absence of line voltage and the
presence of any busbar voltage. If the return condition has been verified for 100 ms, reclosing
authorisation is confirmed.
If the return condition is not satisfied at any moment during this time delay, the delay is
reinitialised.
No line
voltage
Busbar
voltage present
&
Time delay
&
Reclosing
authorisation
Figure 2.6e: Return mode logic
Inversed return mode
This mode is used if the EPAC is located on an outgoing line with line voltage return.
The synchro-check’s function in inversed return mode is to detect the presence of any line voltage
and the absence of busbar voltage. If the inversed return condition has been verified for 100
ms, reclosing authorisation is confirmed.
If the inversed return condition is not satisfied at any moment during this time delay, the delay
is reinitialised.
No busbar
voltage
Line
voltage present
&
Time delay
&
Figure 2.6f: Inversed return mode logic
Reclosing
authorisation
2-88
EPAC 3100/3500
MS/M 1.6882-C
Live bus and live line
This mode is used if the busbars and the line are supplied simultaneously when the circuit breaker
is open.
The synchro-check’s function in loopback mode is to detect whether:
-
line and busbar voltages are present,
-
the difference between the line and busbar frequencies is below a configurable threshold,
-
the vectorial difference between the line and busbar voltages is below a configurable
threshold,
-
the phase difference between the line and busbar voltages is below a configurable threshold.
These conditions must have been verified for a adjustable time delay before reclosing can be
authorised.
If the loopback condition is no longer satisfied, the delay is reinitialised.
Busbar
voltage present
Line voltage
present
DeltaF < threshold
&
Time delay
&
Reclosing
authorisation
Deltaϕ < threshold
DeltaV < threshold
Figure 2.6g: Loopback function logic
All
This mode combines the three preceding modes.
Reclosing authorisation is activated if the return, inversed return or loopback conditions have
been verified.
2.6.3.
Combined auto-recloser/synchro-check operation
The synchro-check module and the auto-recloser run in parallel. The synchro-check module
verifies that the network characteristics are compatible with reclosing. If the conditions have
been verified, the reclosing authorisation is confirmed and the circuit breaker is closed.
A confirmed line or busbar fuse failure inhibits reclosing
authorisation.
If the "1 phase cycle auto-reclose" input is set to 1, the
"reclosing authorisation by synchro-check" output is automatically validated.
2-89
EPAC 3100/3500
MS/M 1.6882-C
2.6.4.
Specific Auto Recloser Operations
2.6.4.1. Busbar Fuse Failure
The input "Busbar Fuse Failure" invalidates the information of autocloser authorisation resulting
from the check synchronising function. This will not permit the cycles of delayed autocloser to
take place in case the check synchronising function is chosen as an option.
2.6.4.2. Fault detection after manual reclosing
If a fault appears and an external "manual reclosing" digital input signal is set to 1:
-
the auto-recloser is inhibited,
-
a 500 ms time delay is initialised by the main protection relays,
-
a reclaim time is initialised by the auto-recloser.
If a fault occurs during the first 500 ms after manual reclosing, there is an instantaneous and
definitive three-phase trip.
* DI "CB closed"
Monostable
500ms
Zone 2 fault
Instantaneous
Three-phase tripping
AR Blocking
(reclaim time)
Always trip
3-phase
Figure 2.6h: Manual reclosing with fault during the first 500 ms
2-90
EPAC 3100/3500
MS/M 1.6882-C
If a fault occurs after the first 500 ms and before the end of the reclaim time, there is a definitive
three-phase trip at the end of the time delay for the step concerned.
DI "CB closed"
500ms
Monostable
Zone 2 fault
Three-phase
tripping after T2
AR Blocking
(reclaim time)
Always trip
3-phase
Figure 2.6i: Manual reclosing with fault during reclaim time
2.6.4.3. Always trip 3-phase
The contact for the "Always trip 3-phase" functionis active after the drop-off of the order to trip
(internal or external) and is maintained until the end of the time delay of blocking.
This contact is activated only if the cycle of autoreclosing is activated by the distance protection
or by the DEF.
2.6.4.4. Cycle in Progress
The contacts for Cycle in Progress are active after the dropoff of the orders to trip and are
maintained until the pick-up of the trip reclose commands.
2.6.4.5. Fault Detection During a Single-Pole Cycle
If a fault occurs during a high-speed single-pole cycle while the phase circuit breaker is open:
-
the three phases are tripped (at T1 or T2),
-
if the high-speed synchro-check cycle option on three-phase fault has been selected, a threepole high-speed cycle is initialised.
2-91
EPAC 3100/3500
MS/M 1.6882-C
2.6.4.6. Auto-recloser blocked
Two external digital inputs can block the autorecloser:
-
"auto-recloser low pressure", indicating too great a drop in circuit breaker pressure,
-
"reclosing impossible", inhibiting the recloser from an external protection device.
Reclosing is forbidden if a block appears during the
reclosing cycle.
2.6.4.7. Auto-recloser Enabled or Disabled
The auto-recloser can be enabled or disabled from the user interfaces or by the digital inputs:
-
Auto-recloser enabled,
-
Auto-recloser disabled.
The digital signal must be present for at least 10 ms in order to consider these conditions.
The "Auto-recloser enabled" and "Auto-recloser disabled"
digital outputs indicate auto-recloser status.
2.6.4.8. Voltage Failure
If the busbar voltage and the line voltage are different for more than 20 seconds, the check
synchronising function locks out. It will therefore be no longer possible to reclose 3-pole.
2.6.4.9. Position of the circuit breaker closed
The input "CB closed" must indicate the three-pole status of the circuit breaker. When the three
poles of the circuit breaker are closed, the state of this input is 1 logic.
The three-pole cycle in progress will not be validated if during the reclosing order this input is
still 1 logic.
If the "CB closed" input is not assigned to any optos (not
used), then the distance protection assumes that the circuit
breaker is operating according to the command given to
it.
2.6.4.10.
Digital counters for Single or Three-phase autoreclosing cycles
EPAC has two counters saved in the EEPROM to consider the number of single or three-phase
cycles carried out by the product. These counters can be reset by the operator dialogue.
2-92
EPAC 3100/3500
2.6.4.11.
MS/M 1.6882-C
Tripping logic set by external signal
These digital inputs are used to operate the EPAC internal auto-recloser from an external
protection device. The associated reclosing cycles are:
2.6.5.
A trip
B trip
C trip
Backup trip
Reclosing cycle
0
0
0
0
None
0
0
1
0
High-speed single-phase cycle
0
1
0
0
High-speed single-phase cycle
1
0
0
0
High-speed single-phase cycle
1
1
1
0
High- or low-speed three-phase distance or DEF
protection cycle
0 or 1
0 or 1
0 or 1
1
Three-phase zero-sequence backup protection cycle
Poles Discrepancy
If the "Poles Discrepancy" input is selected and if this input has a low level status during a singlephase cycle:
-
the single-phase cycle is disabled,
-
a three-phase cycle is started.
The "Poles Discrepancy" input represents a "one circuit
breaker pole open" condition.
If the "poles discrepancy" input is not assigned to any optos
(not used), then the distance protection assumes that the
circuit breaker is operating according to the command
given to it (trip or close).
2.6.6.
Circuit breaker Opening Fault
If a tripping order lasts for more than 300 ms, the reclosing cycle is not performed.
2-93
EPAC 3100/3500
MS/M 1.6882-C
2.6.7.
Inputs/Outputs associated with the Recloser
Input Name
Meaning
Phase A Tripping
Phase A tripped by an external protection device
Phase B Tripping
Phase B tripped by an external protection device
Phase C Tripping
Phase C tripped by an external protection device
Backup protection tripping
Tripped by an external backup protection device
Auto-recloser low pressure
Circuit breaker pressure drop
Manual reclosing
Order for manual reclosing
Reclosing impossible
Recloser blocking
Auto-recloser enabled
Auto Recloser external "in service" command
Auto-recloser disabled
Auto Recloser external "out of service" command
Poles discrepancy
The three circuit breaker poles have different statuses
1 phase cycle auto-reclose
Single-phase cycle in progress in an external recloser
Output name
Meaning
1 Pole reclosing cycle in progress First single-phase reclosing cycle in progress
2.6.8.
3 Pole AR cycle in progress
First three-phase quick reclosing cycle in progress
Always trip 3-phase
Ordinary three-phase tripping command to the protection
device
Auto-recloser Blocking
Indicates the blocking of the auto-recloser
Backup auto-recloser blocking
Time delay for blocking the backup protection device in
progress
Reclosing signal
Circuit breaker reclosing command
Auto-recloser on
Indicates that the auto-recloser is enabled
Auto-recloser off
Indicates that the auto-recloser is disabled
Reclaim time in progress
Indicates that the reclaim time is in progress
Inputs/Outputs associated with Synchro-check
Input Name
Meaning
Busbar Fuse Failure
The busbar VT fuse blown (failed)
1 Phase cycle auto-reclose
Single-phase cycle in progress in an external auto-recloser
Output name
Meaning
Auto-reclose enable by synchrocheck
The procedure selected for synchro-check is valid
Voltage fault by synchro-check
A voltage fault was detected by the synchro-check function
2-94
EPAC 3100/3500
2.6.9.
MS/M 1.6882-C
Logic Functions for Auto-Recloser and Synchro-Check Operation
Circuit breaker reclosing signal
Circuit breaker close command
One-pole reclosing cycle in progress
Cycle time delay for one-pole reclosing in progress
Three-pole reclosing cycle in progress
Time delay for three-pole reclosing in progress
Auto-recloser blocking
Time delay for recloser blocking cycle in progress (after trip by dist. prot., DEF or Weak
Infeed)
Low-speed auto-recloser blocking
Time delay for recloser blocking cycle in progress (after trip by backup protection)
Three-phase trip
Always trip three-phase command to auto-recloser
Auto-recloser enabled
* "Auto-recloser Enabled" DI Command
Auto-recloser Enabled from WinEPAC
1
Auto-recloser enabled
Auto-recloser Enabled from COURIER
Auto-recloser Enabled from VDEW
Auto-recloser disabled
* "Auto-recloser Disabled" DI Command
Auto-recloser Disabled from WinEPAC
1
Auto-recloser disabled
Auto-recloser Disabled from COURIER
Auto-recloser Disabled from VDEW
logic
*: External
input (TS)
: External input (TS)
or internal logic
2-95
EPAC 3100/3500
MS/M 1.6882-C
Auto-reclose enabled by synchro-check function
Three-pole reclosing by synchro-check function authorised
Voltage fault by synchro-check
Busbar voltage present
Line voltage present
*
Three-pole circuit breaker closed
1
&
20s
Voltage fault by
synchro-check
logic
*: External
input (TS)
: External input (TS)
or internal logic
2-96
EPAC 3100/3500
2.7.
MS/M 1.6882-C
FAULT ANALYSIS
The standard EPAC is used to analyse the detected faults from a general point of view. This
analysis can be consulted from the various user interfaces. It provides the following indications:
-
the main characteristics of the electrical values measured during the fault,
-
the measured fault distance, resulting from the distance-resistance calculation that was used
to determine the convergence of the loop with the fault.
This analysis can be made more accurate by integrating the module: a fault locator, which gives
an accurate indication of the fault distance, whatever the network topology.
Fault reports can be printed out automatically on a printer connected to the front panel of the
EPAC 3100/3500 if the latter includes a local printer option.
2.7.1.
Fault Reports
Once an electrical fault has been processed by one of the protection functions, the EPAC records
its main characteristics in a fault report, i.e.:
-
feeder and substation's name,
-
date and time of fault,
-
the fault voltages,
-
the fault currents,
-
the network frequency before the fault,
-
phase(s) affected by the fault,
-
phase(s) tripped,
-
the type of protection device initiating the trip,
-
if tripped by distance protection:
. the zone where the fault is located,
. the distance of fault, expressed in kilometres, miles, Ohms/LV, Ohms/HV and line
percentage,
. the resistance of fault expressed in Ohms/LV and Ohms/HV.
The reports of the last ten faults can be consulted via operator dialogue. They are also transmitted
across the communication network if the communication option has been integrated into the
EPAC.
The fault reports are saved in memory.
Courier database events are saved in EEPROM if the configuration is changed.
Fault reports recorded by the protection function can be deleted via:
-
the WinEPAC software,
-
the EPAC front panel display unit,
-
the COURIER master station.
The user password must be entered before sending a
"delete fault reports" command.
2-97
EPAC 3100/3500
MS/M 1.6882-C
2.7.2.
Disturbance recording element (optional)
This function, available on some models, records electrical values and is based on the same
principle as the acquisition unit in the TPE 2000 disturbance recorder, designed by ALSTOM
T&D P&C. It allows the fault recording data to be acquired and stored for a total duration of up
to five seconds per record. Recordings include:
-
the 8 analogue values that are continuously acquired by the EPAC (IA, IB, IC, Ir, UA, UB, UC,
Ur),
-
the status of 0 to 32 digital inputs/outputs.
2.7.2.1. Cyclical Storage of the Fault Recording Data
Analogue and digital values are continuously stored in a buffer memory. The buffer memory
duration, called "pre-time", can be configured from 0.1 to 0.5 s. The fault data measured during
this pre-time is thus always available in the fault recording module.
2.7.2.2. Starting-up the Disturbance Recording
The disturbance recording element is started up:
-
when a digital input/output changes status. The choice of status change to be taken into
account (high-to-low or low-to-high transition) is adjustable,
-
exceeding the maximum or minimum authorised frequency range threshold,
-
exceeding the maximum or minimum authorised voltage or current range threshold.
A digital input called "Disturbance recorder starting" is
integrated into the EPAC. This input can be used for
external start-up of the disturbance recording function. It
can be configured in the same way as any other digital
input.
2.7.2.3. Recording the Data
Once the disturbance recording element has been started-up:
-
the analogue values and logic signals stored in the pre-time memory are transferred to the
memory,
-
the evolution of these values and signals is then recorded during the so-called post-time, which
can be configured from 0.1 to 4.5 sec.
The maximum duration of a recording can thus be configured from 0.2 to 5 sec (0.5 sec before
start-up and 4.5 sec following start-up).
The disturbance recording element can record an average of 40 events. When the faultdedicated memory is full, restarting the fault recording function will erase the oldest event.
2-98
EPAC 3100/3500
MS/M 1.6882-C
0.1 to 0.5 second
0.1 to 4.5 second
Pre-fault time
Post-time
Figure 2.7a: Example of fault recording
Reactivating the fault recording function when fault data is
being recorded will reset the post-time from this second
start-up.
2.7.2.4. Restituting the Data
The EPAC disturbance recording element is integrated into the TPE 2000 architecture in the same
way as a UA-type acquisition unit. Therefore, the EPAC can be connected to the following:
-
a UR 2000 or UR 2000-2 type concentrator via a current loop link, to access the data using
the TPE 2000,
-
a PC via an RS232 serial link, to access the data locally using the WinV24 disturbance
recording software,
-
a PC by modem link to access the data from the WinMODEM software.
Only COURIER- and TPE-format disturbance recording
allow event data to be accessed locally from the EPAC front
panel, using WinTPE.
The data is exploited by the WinANALYSE application.
The WinV24, WinMODEM and WinANALYSE applications are part of the WinTPE software package.
Moreover, the fault recording data can be exchanged via an IEC 870-5 VDEW protocol control
system connected to the EPAC.
There are differences between TPE disturbance recording
and disturbance recording with VDEW and COURIER. For
instance, the pre- and post-times cannot be configured
when using the VDEW disturbance recording but can be
with WinTPE.
PAS&T's K-Graph software is not compatible with the
EPAC's disturbance recording format.
2-99
EPAC 3100/3500
MS/M 1.6882-C
2.7.2.5. Associated Inputs/Outputs
Input
Meaning
Disturbance recorder starting
2.7.3.
Disturbance recorder started by an external input
Fault Locator
The fault locator is used to indicate in the fault report the distance from a fault to the line ends,
with an accuracy of approximately 3%. This accuracy can be particularly important to determine
the network location where the repair work must be carried out when a fault occurs.
The fault locator measures the distance by applying the same distance calculation principle as
that used for the measurement-distance algorithm. However, the former measurement is more
accurate since it is based on a greater number of samples and it uses the fault currents as models:
-
-
-
for a single-phase fault AN
: ∆IA - I0
BN
: ∆IB - I0
CN
: ∆IC - I0
AB
: ∆IA - ∆IB
BC
: ∆IB - ∆IC
CA
: ∆IC - ∆IA
for a two-phase fault
for a three-phase fault ABC : ∆IA - ∆IB
The calculation is based on the following equation:
U = xV + rI, where x = distance of fault.
2.7.3.1. Selecting the fault location data
Selection of the analogue data that must be used depends on:
-
how the fault is processed by the algorithms,
-
the line model.
2.7.3.2. Processing the fault with the algorithms
The calculation of the distance will utilise the rapid algorithm if:
-
a fault is detected by the rapid criteria,
-
the tripping occurred before the elapse of timer T2,
-
the distance to the fault is less than 105% of the line.
In this case, the distance of fault indicated in the fault report will be displayed as follows:
distance to the fault = 24.48 km (L)
and its accuracy will be 2-3%.
If these conditions are not true, the distance of fault indicated in the fault report will be the value
calculated by the distance protection, which is slightly less accurate. The display will then be
as follows:
distance to the fault = 31.02 km
and its accuracy will be 5%.
2-100
EPAC 3100/3500
MS/M 1.6882-C
2.7.3.3. Selecting the line model
The fault locator can differentiate between two types of line:
-
single lines,
-
lines with a mutual coupling on a parallel network.
This parameter must be taken into account by the fault locator because, if the lines belong to a
parallel network with a mutual coupling, then it is necessary to integrate the value of the residual
coupling current into the distance measurement equation. The residual current is determined on
the basis of the coupling residual voltage as measured by a zero-sequence compensation unit.
The relationship between the coupling residual current and the coupling residual voltage is as
follows:
Vc = K.Ir’ where:
-
Vc = voltage supplied by the zero-sequence compensation unit (external BCH case),
-
K = Zm/Z1 = constant,
-
Ir’ = derivative of the residual current for the mutual coupling.
External BCH case
Zero-sequence
Compensation
Unit
Vc=Ku(ΣI'r)
FAULT LOCATOR
EPAC
I'r2
I'r1
Figure 2.7b: Mutual Coupling Acquisition
2.7.4.
Local Printing of Fault Reports
With some models, fault reports can be printed out automatically on a printer connected to the
RS232 socket on the EPAC 3100/3500 front panel.
Either two and three fault reports per page can be printed out on the local printer. The information
printed out is the same as that supplied via one of the EPAC user interfaces.
The exact number of reports printed on each page and the
print format depend on the type of printer selected and the
printer driver.
2-101
MS/M 1.6882-C
EPAC 3100/3500
The local printer should be connected to the serial port of the AC board on the EPAC 3100/
3500 front panel. Use of the local printer excludes use of the link between the EPAC 3100/3500
and WinV24, which also uses the AC board serial port.
Local printing can be initiated and the printer driver selected from any of the EPAC 3100/
3500’s setting interfaces:
-
the EPAC 3100/3500 front panel display unit,
-
the WinEPAC software,
-
the PA&T software via the KBUS-COURIER link.
The EPAC uses the DTR signal of the printer’s serial link to access whether a local printer is
present. This allows the EPAC to differentiate between a local printer link and one with a WinV24
system. The consequence of using the DTR signal is that no alarm is sent if the local printer is
not operating properly (paper jam, printer buffer full, etc.).
2.8.
VIEWING POLLING DATA
This function is used to view the constantly changing values of measurements taken and signals
sent and received by the EPAC. In polling mode, the significant values are sent to the WinEPAC
software at regular intervals via a PC connected to the EPAC front panel. Polling can be inhibited
2-102
EPAC 3100/3500
MS/M 1.6882-C
to obtain a snapshot of the values at any given moment. This function can only be used after the
polling data viewing screen has been accessed.
The function is used to view the instant value of:
-
the analogue values for the permanently operating electrical network,
-
the current direction,
-
the digital inputs/outputs connected to the EPAC input/output boards.
The analogue values that can be viewed are:
-
voltage for each phase,
-
current for each phase,
-
active and reactive power,
-
frequency.
Figure 2.8a: WinEPAC polling of the data displayed
!
2.9.
The reactive power direction is not significant.
USER INTERFACES
The EPAC 3100/3500 standard user interface is comprised of:
-
monitoring indicator lights,
-
the WinEPAC software installed on a micro-computer,
-
an EPAC front panel display unit ( depending on the model),
2-103
EPAC 3100/3500
MS/M 1.6882-C
-
the protection Access Software & Toolkit (PAS & T) software installed on a micro-computer
from the master control computer for COURIER communication,
-
WinTPE for the TPE disturbance recording function.
The different user interfaces are presented in the following
paragraphs. A full description of the WinEPAC software
and the display unit can be found in Chapter 4 of the
Commissioning and Maintenance Guide.
2.9.1.
Monitoring Indicator Lights
There are three LEDs on the EPAC 3100/3500 front panel. They indicate:
-
minor and major alarms,
-
the tripping of the associated circuit breaker,
-
the EPAC 3100/3500 status.
Tripping indication
TRIP
Alarm indication
ALARM
Correct operation
indication
RELAY AVAILABLE
Figure 2.9a: EPAC 3100/3500 Front Panel Lights
Alarm Indication
The LED "ALARM" illuminates when a minor or major failure has been detected by the
autocontrol of the product.
Correct Operation Indication
The LED "RELAY AVAILABLE" blinks when the EPAC is functioning and no major failure has been
detected.
Distance Protection Status Indication
The LED "TRIP" lights up when the EPAC trips.
It is possible to switch off this LED from the user interfaces (front display unit, WinEPAC or PAS&T).
2-104
EPAC 3100/3500
2.9.2.
MS/M 1.6882-C
WinEPAC Software Installed on a Micro-Computer
This software is used to:
-
manage the various data supplied by the EPAC,
-
view the status of the electrical network (voltage, current, power, frequency, power flow
direction),
-
view fault records stored by the EPAC,
-
carry out a self test of the protection via a maintenance dialogue,
-
send commands to the EPAC (autorecloser status, configuration groups switchover, tripping
2-105
EPAC 3100/3500
MS/M 1.6882-C
counters reset).
2.9.2.1. Required Environment
The WinEPAC software is supplied on floppy disk and can be installed on a PC/AT type microcomputer with a Windows 3.11 environment. The micro-computer is connected directly to the
EPAC 3100/3500 front panel, at the RS232 serial link connector, for local exploitation or to
the communication network that is itself connected to the communication board, for remote
exploitation.
2.9.2.2. Screen Description
The configuration and display parameters are contained in screens that can be accessed via
tabs or buttons.
Each screen proposes options that make data search more accurate.
Figure 2.9b represents the software main menu.
Figure 2.9b: WinEPAC Software Main Menu
There are two types of screen:
-
intermediate screens, used to select complementary options in addition to the one already
selected,
-
parameter display or configuration screens for the selected option.
Parameter Screens
These screens allow the parameters to be displayed or modified. Figure 2.9c represents the
parameter screen corresponding to the line parameter configuration.
2-106
EPAC 3100/3500
MS/M 1.6882-C
Figure 2.9c: Example of a Parameter-setting Screen
Online help is available for most of the fields.
The WinEPAC software is described in Chapter 4.2.1 of
the Commissioning and Maintenance Guide.
WinEPAC has been developed for Windows 3.11. It also
runs with Windows 95, but some minor inconveniences
may occur. It does not run with Windows NT.
2.9.3.
Front Panel Display Unit
2-107
EPAC 3100/3500
MS/M 1.6882-C
2 lines of 16 characters
Enter
key
Figure 2.9d: Front Panel Display Unit
The display unit is comprised of:
SET
Help
-
a screen consisting of 2 lines with 16 characters each,
-
4 arrow keys,
-
a Set key,
-
a Help key.
Arrow keys
Help key
The dialogue that can be accessed from the display unit provides access to the same functions
as those available from the WinEPAC software installed on a PC. The two main differences
between the two software programmes are:
-
the names assigned to the functions and parameters: since the front panel display unit cannot
accept more than 16 characters, a function or parameter name has less characters on the
display unit than it has with the WinEPAC software,
-
function access and parameter modification, which are via the 4 arrow keys and the Set key.
The front panel display unit software is described in the
Chapter 4.2.2 of the Commissioning and Maintenance
Guide.
A help function is permanently available. It provides
information about the applicable option, the displayed
parameter, etc. To activate the Help function, press the
Help key.
2.9.4.
Protection Access Software & Toolkit software (communication by COURIER)
This software is designed to adapt to all types of relay using the COURIER protocol. The data
required for its operation are supplied to it by the relays.
It is used to view the status of the relay it is connected to, via a KITZ hub in order to modify its
parameters and to exchange electrical network characteristics data.
2-108
EPAC 3100/3500
MS/M 1.6882-C
The Protection Access Software & Toolkit software functions are categorised according to two
distinct types of task:
Background tasks
These tasks involve functions that are continuously updated or checked by the software. They
include:
-
polling for data (voltage, intensity, frequency, input/output status),
-
relay recognition,
-
fault detection,
-
disturbance recording events.
Current tasks
These tasks involve functions that are deliberately activated by the operator, such as relay
parameter modification.
The Protection Access Software & Toolkit software is
described in Chapter 4.2.3 of the Commissioning and
Maintenance Guide.
The K-Graph application of the PAS&T software does not
read EPAC disturbance records.
2.10.
MANAGEMENT OF SETTING GROUPS
The EPAC memory can store four groups of configuration parameters that are numbered from
1 to 4. Each parameter group corresponds to a specific EPAC configuration. Only one group
is active at a given time.
2-109
EPAC 3100/3500
MS/M 1.6882-C
A new group of parameters can be activated by one of the two procedures below:
-
via an activation command sent from one of the user interfaces or from one of the
communication interfaces,
-
via a command received from two external digital inputs, with the status of digital inputs
corresponding to the number of the parameter group to be activated, expressed in binary
code:
If the status of the
digital input "bit 1" is:
and the status of the
digital input "bit 0" is:
then the activated group
of parameters is:
0
0
1
0
1
2
1
0
3
1
1
4
Switching from one group of parameters over to another by a digital input is achieved by the
detection of a transition in the digital inputs (transition confirmed in 2 sec.).
The bit 0 switching and bit 1 switching digital outputs indicate the active configuration.
Bit 1 switching
Bit 0 switching
Group of
active parameters
0
0
1
0
1
2
1
0
3
1
1
4
The switch-over from one group of parameters to another can be identified by reading a
transition in the digital outputs.
The relay only considers input status if no switching
configuration arrives from another interface (WinEPAC,
front panel display, communication). A switching configuration command from one of these interfaces takes priority
over the status of the switching inputs.
2.11.
COMMUNICATION WITH EXTERNAL SYSTEMS
An optional AC board can be integrated into the EPAC in order to manage communication with
one or more external systems. Different systems can therefore be connected, for example:
-
a data exchange system for the fault data recorded by the EPAC (modem board with the
2-110
EPAC 3100/3500
MS/M 1.6882-C
WinMODEM software or current loop board ),
-
a supervision system via VDEW or KBUS-COURIER,
-
a time synchronisation system.
2.11.1. Exchanging Fault Data
The EPAC disturbance recording function is integrated into the architecture of the TPE 2000 fault
recorder designed by ALSTOM T&D P&C. As a result, the disturbance data recorded by the
EPAC can be directly exchanged with:
-
the WinANALYSE software installed on a micro-computer,
-
by modem via the WinMODEM software,
-
the UR 2000 restitution unit of the TPE 2000 disturbance recorder via a current loop. In this
case the EPAC is considered to be a UA.
The micro-computer with the WinTPE software is connected in the following way:
-
either directly to the serial link connector of the EPAC AC board, when the fault data is
accessed locally while using the disturbative recorder TPE in EPAC,
-
or to the TPE 2000, when the fault data is accessed remotely.
EPAC
UA
EPAC
UA
EPAC
Current
loop
Modem
STN, X25
or RS 232
RS232
for local use
UR
Modem
STN, X25
or RS 232
WinTPE
Master Control
Computer
Figure 2.11a: Exchange of TPE disturbance recording data
If the VDEW format disturbance recorder is used, fault data
cannot be exploited locally with the Win TPE software.
2-111
EPAC 3100/3500
MS/M 1.6882-C
2.11.2. Interface with a Control System
The EPAC can be adapted to the communication protocols used by most control systems but it
is specifically suited to the VDEW and KBUS COURIER protocols. The latter have been adapted
from the IEC 870-5 standard to correspond to the specificities of digital protection units used
in the domain of electrical networks. They allow a dialogue to be set up between the EPAC and
a control station which centralises the data from several protection units and then sends
commands to these protection units.
The VDEW and COURIER protocol architecture is based on the EPA (Enhanced Performance
Architecture) OSI model. This module divides communication services into three layers:
-
Layer 1 (physical),
-
Layer 2 (data link),
-
Layer 7 (application).
These networks can exchange fault data recorded on the EPAC, as well as control and command
signals.
KBUS interface and COURIER protocol characteristics
The KBUS interface and the COURIER protocol are designed by the GEC ALSTHOM T&D P&C.
They serve as the link between a PC-type master control computer and protection or slave devices
like the EPAC, for instance, together with the dialogue on this link. Control, monitoring and
configuration operations can be performed on the EPAC from a remote control centre. Dialogue
is carried out via one of the PC’s serial ports.
KBUS networks are multiple cluster networks. Control centres can control up to 8 clusters of 32
(or fewer) slave relays. The total length of each cluster is limited to 1000 m.
COURIER language is designed to be used on all types of PC, without any special characteristics.
It uses a structure based on data clusters that have a particular format, with the clusters containing
all the information necessary for their use.
EPAC or other relays
1
r
ste
K-BUS clu
32
RS 485 64 kbits
K-BUS
Master
Control
Computer
KITZ
RS232
CEI870
9600 or 19200 bauds
Other
K-BUS clusters
Figure 2.11b: KBUS cluster topology
2-112
EPAC 3100/3500
MS/M 1.6882-C
The network allows the polling of information such as:
-
instantaneous values for digital and analogue data,
-
alarm appearances,
-
memorisation of events (trips),
-
changes in input/output status.
It is also used, on user request:
-
to modify protection parameter settings,
-
to log variations in digital inputs/outputs,
-
to consult and if necessary modify the hardware and software options installed on the EPAC,
-
to download fault recording events,
-
to pass orders (changes of date, etc.).
VDEW characteristics
The VDEW protocol defines exchanges between the protection relays and a master control
computer. Data is exchanged via a serial link. The master control computer can communicate
with:
-
one protection device at a time and receive data in return,
-
the whole network, but without receiving any reply.
EPAC or other relays
1
n
Optical fibre link
RS232
CEI870-5-2
Master
Control
Computer
Figure 2.11c: VDEW topology
2-113
EPAC 3100/3500
MS/M 1.6882-C
The master control computer can scan each protection device:
-
by polling at regular intervals on the priority data link parameter settings layer,
-
on user request, by an overall check on the application layer.
The master control computer can then issue the following general orders:
-
Enable / disable auto-recloser,
-
Operate / block teleaction,
-
Operate / block protection device,
-
Request information,
-
Log messages,
-
Switch configuration.
2.11.3. Synchronisation with an External Time Signal
Fault and maintenance data are dated according to a dating device that is regularly updated
by an internal clock which can by synchronised by an external clock (depending on models and
connected systems). The dated events are:
-
the disturbance data,
-
the data stored when an electrical fault occurs,
-
the data stored when the EPAC fails to operate correctly.
If no external signal is provided for synchronisation, the dating device is based on a configurable
time reference (unit: 1 ms). It is subject to:
-
the internal clock drifts,
-
the dating device drifts during the power-off periods,
-
the inaccuracy of the configuration operation.
If an external signal is provided, the EPAC synchronizes its internal clock with it and thus allows
integration into a global substation control system.
An optional interface between the AC board and the IRIGB board can be incorporated into the
EPAC. In this case, the IRIGB receiver uses signals from aerial time receivers.
Synchronism is:
-
relative if the external signal comes from:
. a data concentrator (UR 2000) of the TPE 2000 (disturbance recorder),
. a VDEW protocol network,
-
absolute if the external signal is of the hertzian type (radio or satellite signal) with IRIG.B.
If the AC communication board is used, the dater of EPAC
is not "saved" in the case of power supply loss.
2-114
EPAC 3100/3500
MS/M 1.6882-C
BLANK PAGE
MS/M 1.6882-B
EPAC 3100/3500
CHAPTER 3
HARDWARE AND
SOFTWARE DESCRIPTION
EPAC 3100/3500
MS/M 1.6882-B
BLANK PAGE
3-1
MS/M 1.6882-B
EPAC 3100/3500
CONTENT
PAGE
3.1.
3.1.1.
3.1.2.
HARDWARE DESCRIPTION _____________________________________________________ 3-3
Data Flow ___________________________________________________________________ 3-3
Board Functions ______________________________________________________________ 3-5
3.2.
3.2.1.
3.2.2.
SOFTWARE DESCRIPTION _____________________________________________________ 3-11
Sequencing Software Tasks ___________________________________________________ 3-11
EPAC Self-Tests ______________________________________________________________ 3-11
3-2
EPAC 3100/3500
MS/M 1.6882-B
BLANK PAGE
3-3
MS/M 1.6882-B
3.1.
EPAC 3100/3500
HARDWARE DESCRIPTION
The EPAC is built around a basic module assembly. Add-on boards for different functions are
available according to the model concerned
This base is comprised of an insulated and stabilised power supply and the following items:
-
a QTF input transformer board,
-
a CPU-TMS processing board,
-
an IO-1 or IO-3 tripping and inputs/outputs board.
Optionally, the following boards may be added without requiring wiring changes:
an AFF management board for the front display unit,
-
an AC management board for the front panel display unit, the disturbance recorder TPE and
miscellaneous communication modes,
-
an IO-2 tripping and outputs board or a second IO-1 or IO-3 tripping and inputs/outputs
board.
Data Flow
WinEPAC MMI
MMI RS232
Front panel
LCD display unit
U
I
Filters
Filters
Multiplexer
3.1.1.
-
H/S
and
ADC
RS232
Local
communication
Inputs
Communication
logic
protection
algorithmic filters
External
link
EPAC ARCHITECTURE
WinTPE
Disturbance
recording
software
Figure 3.1a: Data Flow
- Current loop
- IEC 870-5
VDEW
standard
Output
3-4
EPAC 3100/3500
MS/M 1.6882-B
The EPAC acquires analogue values from the measurement dividers. The QTF transformer board
has the following functions:
1.
To adapt these values for use and to isolate them with respect to the disturbances.
2.
To filter the signals in order to eliminate high frequencies that cannot be sampled correctly. Anti-return filters are used for this task.
These values are then transmitted to the CPU-TMS board which has the following functions:
1.
To multiplex and then to sample the filtered analogue values.
2.
To make sure that a 12-bit, analogue-to-digital converter converts the information at
the rate of 24-samples per period. The number of operations that are carried out
in analogue format should be reduced to a minimum because the accuracy of these
operations is linked to the accuracy of the components.
3.
To filter the digitised samples so that any components likely to have an adverse affect on
accuracy are eliminated.
4.
To formulate, using algorithms, the values required by the EPAC for decision-making.
EPAC’s logic functions use these values as well as logic messages from the IO board to
formulate orders and signals.
Tripping orders and signals transmitted by the CPU-TMS board are sent to the IO board(s)
equipped with contacts.
With the operator dialogue, the operator can configure the way the logic inputs and outputs of
the different modules are assigned to the board contacts.
3-5
MS/M 1.6882-B
3.1.2.
EPAC 3100/3500
Board Functions
Voltages Currents
EPAC
Analog channel
acquisition
QTF Board
UC TMS Board
Filtering and pre-processing
the analog signals
Light indicators
management
IO-1 or IO-3
Board
Interface
with the
I/O boards
Protection and fault
analysis functions
IO-1 or IO-3
or IO-2
Board
Communication
interface
User interface
management
AC Board
RS232
VDEW
KBUS
Current
loop
Modem
IRIGB
Board
TRIP
ALARM
RELAY AVAILABLE
SET
TERMINAL 1
Help
TERMINAL 2
Front panel
display unit
Front panel
lights
Control system
via VDEW
UR2000 disturbance
restitution unit
Control via
KBUS-COURIER
WinEPAC MMI
Local WINV24
or
printer
Time
synchronisation
WinMODEM disturbance
record uploading
: Local RS232
WinTPE: WinV24
WinMODEM : Modem connected to EPAC
WinANALYSE: Analysis of disturbance recorder
Figure 3.1b: Architecture of the EPAC
3-6
EPAC 3100/3500
MS/M 1.6882-B
3.1.2.1. QTF Transformer Board
This board is in double "Europe" standard format and is used to bring the analogue values
provided by the transformers down to a value that is compatible with the EPAC electronics. It
includes:
-
3 phase current transformers with two primary windings, one for the 5A rating, the other for
the 1A rating (T1, T2, T3),
-
for networks with a directly earthed neutral: 1 residual current transformer with two primary
windings, one for the 5A rating, the other for the 1A rating (T4); a dedicated CT core for the
Directional Earth Fault (isolated or impedant network),
-
3 phase voltage transformers (T5, T6, T7),
-
1 busbar voltage transformer (T8),
-
1 image voltage transformer for the zero sequence current compensation of the parallel line
(T9),
-
1 overvoltage protection device,
-
1 analogue anti-overlap filter per input.
3.1.2.2. CPU-TMS Processing Board
This board is in double "Europe" standard format and it performs the main equipment functions,
i.e.:
-
analogue-to-digital conversion of the signals from the QTF board,
-
protection management depending on the signal status,
-
communication with the link and peripheral boards.
Analogue to Digital Conversion (ADC)
The current inputs are scanned twice so that the two ranges (gains), x1 and x16, are obtained
in order to increase the dynamic range. Both ranges are created by a programmable amplifier
that switches alternatively between the x1 and x16 product.
The analogue-to-digital converter is energised by a DC-DC converter in order to eliminate power
supply noise.
The channels are sampled at a rate of 24 samples per period, then they are converted by a 12bit ADC. The following information is obtained:
-
currents coded on 15 bits + sign,
-
voltages coded on 11 bits + sign.
The board also comprises three reference voltages used to check the system gains.
Processing
The board has a 320-C25 TMS signal processor used for processing operations. The processor
can operate with a 50 MHz clock. It controls the sampling frequency, making it 24 times the
network fundamental frequency. To do this, it measures this frequency with a zero transition
method.
3-7
MS/M 1.6882-B
EPAC 3100/3500
The TMS formats the signals by filtering them and then calculates the protection values. The TMS
acquires logic input values and combines them with the results of the protection calculations for
decision-making operations. These decisions are materialised by the control of the tripping
relays and signalling contacts.
The TMS also manages the front panel LEDs and the serial link on the CPU-TMS board.
The CPU-TMS board also has different memories:
-
RAM working memory,
PROM program storage,
back-up memory for the EEPROM characteristic values and parameters.
It also has the following:
-
a watchdog,
a serial communication interface,
counters.
Interfaces
The board is equipped with lights that indicate the operating status.
The board also has an RS232 serial link on its front panel, that can be accessed via the front
panel. It is used to dialogue with a PC.
The CPU-TMS board is connected to the following:
-
the QTF analogue value acquisition board,
the IO-1 board.
It can be connected to the following boards:
-
the AFF management board of the front panel display unit (optional),
the AC management board of the front panel display unit of the disturbance recorder TPE
and various communication modes (optional),
an additional IO-1 board, an IO-2 board or an IO-3 board (optional).
3.1.2.3. IO-1 and IO-3 Boards
This boards are in double European standard format and have TS logic inputs, TC signalling
contacts and DEC (trip) command relays.
The logic inputs and the signalling contacts may be configured on commissioning, providing the
user with the choice of the appropriate wiring diagram.
The design of the IO boards is such that the tripping orders and signals can be self-checked.
3-8
EPAC 3100/3500
MS/M 1.6882-B
Logic Inputs (TS)
The IO boards have eight logic inputs that are isolated and filtered by optocouplers. These inputs
are designed to withstand the substation’s environmental conditions.
Signalling Contacts (TC)
The input/output boards are equipped with sixteen signalling contacts (13 for IO-3). Access
to these contacts in reading and writing mode is via a resistive filter and a buffer that are used
to display the status of the relay for the self-test.
Contact Fault Equipment (TC)
The IO-1 or IO-3 board has a contact fault equipment (closed in rest). This contact enacted by
the software or the drop-off of the watchdog indicates whether the equipment is faulty or not.
Tripping and Closing Commands
These boards have three tripping (6 tripping contacts for IO-3) and one closing contacts. These
contacts are designed to be directly connected to the circuit-breaker coils. They are accessed
in reading and writing mode via a resistive filter and a buffer that are used to display the status
of the relay for the self-test.
Signals Associated with the Functions of the EPAC
The logic inputs/outputs associated to the EPAC functions can be allocated to the physical
contacts of the input/output boards by operator dialogue. This means that the signals and
contacts to be used can be selected and logic combinations can easily be made with the signals.
For example, if several output signals are allocated to one contact, the contact status is a logic
"OR" between these signals (see Appendix).
3.1.2.4. Front Panel Display Unit
The front panel has a backlit display unit of 2 lines having 16 characters. There are also six
scrolling keys and an interface board. The four arrow keys are used to scroll through the menus
and to access all the programming functions of the EPAC.
The front panel dialogue is used to:
-
set the protection parameters,
-
to view the status of digital inputs and outputs and the value of analogue inputs,
-
examine the last fault record,
-
analyse the protection failures,
-
acknowledge the alarm(s) and then re-start the protection function.
If the self-test detects a fault, the EPAC changes over to
maintenance dialogue mode, and the results of the self-test
are displayed on the front panel.
If the MES menu is not active, the display goes off when it
is not used for a few minutes. To turn it back on, click on
one of its buttons.
3-9
MS/M 1.6882-B
EPAC 3100/3500
3.1.2.5. Optional additional board
The following boards are complements to the main IO-1 or IO-3 boards. They are used as
interfaces with the digital outputs and provides additional tripping, closing and equipment fault
contacts. There are 3 different possible boards for the additional board location:
IO-1 (additional)
It is composed by:
-
3 tripping relays,
-
1 CB closed,
-
16 signalling contacts,
-
8 opto inputs,
-
1 equipment fault contact (contact closed in rest).
IO-3 (additional)
It is composed by:
-
6 tripping relays,
-
1 CB closed,
-
13 signalling contacts, (n° 14, 15, 16 can not be assigned )
-
8 opto inputs,
-
1 equipment fault contact (contact closed in rest).
IO-2
It is composed by:
-
3 tripping relays,
-
1 CB closed,
-
16 signalling contacts,
-
1 equipment fault contact (contact closed in rest).
3.1.2.6. AC Board
This board has the following standard functions:
-
management of the front panel display unit,
-
management of a serial link for local restitution of fault recording data on the WinTPE
software or for automatic printout of fault reports.
Two "daughter boards" can be connected to the AC board. These boards can be chosen from
among the following four boards:
-
loop current interface board,
-
modem interface board,
-
870-5 VDEW interface board,
-
KBUS interface board.
!
The KBUS and VDEW boards are mutually exclusive, as
are the Current Loop and Modem boards.
3-10
EPAC 3100/3500
MS/M 1.6882-B
3.1.2.7. AC board "daughter-boards" (optional)
MODEM board
This board is used to exchange fault recording data between the EPAC and a micro-computer
equipped with the WinMODEM software.
MODEM board characteristics are:
-
8 bits,
-
no parity,
-
one stop bit,
-
baud rate: 300 to 19200, configurable from one of the user interfaces.
Current loop board
This board is an interface between a UR-type restitution unit and the EPAC, which is then
regarded as a UA-type acquisition unit. It is used to restitute the fault recording events in TPE
2000 format.
VDEW board
This board enables the EPAC to communicate with a centralised master control computer, via
the VDEW protocol.
KBUS board
This board is an interface between the UART1 channel of the AC board and the KBUS network.
3.1.2.8. IRIGB board
IRIGB board time is transmitted to the AC board every 30 seconds.
The difference between IRIGB board time and AC board time is calculated as an absolute value:
-
differences of over 1 second are corrected instantly,
-
differences of between 5 ms and 1 secs are corrected gradually. The internal time of the AC
board is advanced or retarded every 10 ms, with the correction being completed before the
next query to the IRIGB board.
3-11
MS/M 1.6882-B
3.2.
SOFTWARE DESCRIPTION
3.2.1.
Sequencing Software Tasks
EPAC 3100/3500
The CPU-TMS board software of the EPAC, i.e., the protection functions, is sequencer-based.
This sequencer summons the tasks according to their order of priority.
It is activated by conversion end-interrupts at each sampling step, i.e. 24 times per period. If
a non-priority task has not been completed while a priority task is activated, the non-priority tasks
resumes processing at the point where it was interrupted when the sequencer returns control to
it.
This structure allows non-priority functions to be performed when the processor is not busy with
the priority tasks.
For example, fault-finding is a priority task whereas maintenance dialogue management is a
non-priority task.
3.2.2.
EPAC Self-Tests
The EPAC self-testing function has the following objectives:
-
to prevent the protection equipment from performing any inadvertent operations,
-
to detect faults before the faulty functions are requested, and thus to repair the fault before
the equipment malfunctions,
-
to facilitate repairs.
The equipment designers have taken care not to reduce the reliability of the EPAC by limiting
the number of additional components.
If the complete self-test function is chosen on power-on condition, the following two types of check
are possible:
-
a continuous self-test that avoids any inadvertent operation,
-
a self-test, processed by low-priority tasks, i.e., with a periodicity of a few seconds and with
the main aim of checking that the functions are available.
If a fault is detected:
-
if the fault is not redhibitory, the protection function continues operating and a "non-urgent
alarm" signal is issued,
-
if the fault is redhibitory, the protection function stops. The protection then, executes a
complete autocontrol of initialisation. If the fault is confirmed, the alarm signal is positioned
and the functions of EPAC are no more assured. If the autocontrol of initialisation does not
confirm the anomaly, EPAC restarts normally. Two redhibitory (major) faults in less than 24
hours provoke the stopping of the product and the alarms are positioned. In the case of
stopping of EPAC, the alarms "Major fault" and "Equipment fault" are emitted.
3-12
EPAC 3100/3500
MS/M 1.6882-B
3.2.2.1. Continuous Self-Test
This self-test has the same priority as the protection tasks. It includes:
-
a self-test by hardware interrupts:
. PFIN (loss of auxiliary supply),
. watchdog,
. calculation time exceeded,
-
a plausibility check of the current channels. It compares the sum of the phase voltages and
currents to the value of the channel of acquisition of the residual current,
-
an acquisition sequencing check. It checks that the analogue channel acquisitions are
correctly sequenced by analysing their addresses,
-
a verification of the messages exchanged between the boards containing processors, by
using check sums,
-
verification of the FIFO for access to the analogue-to-digital conversion values,
-
verification of the messages exchanged by the RS232 link of the CPU-TMS board,
-
verification of the tripping and signalling commands by re-reading the order and checking
the continuity of the command circuit. This check should be carried out before giving an order
to a relay or contact.
3.2.2.2. Self-Test as a Background Task
This self-test is a continuous self-test that uses calculation power reserves not used for priority
tasks. The duration of the complete self-test cycle is too short to affect the reliability or the
performance of the EPAC.
The main actions are the following:
-
bus self-test by:
. checking the "address" bus by accessing the specific addresses and memories,
. checking the "data" bus by writing on the memory zones,
. checking the "command" bus at the different elements,
-
watchdog self-test by checking that it sends an interrupt after its time-delay,
-
memory self-test:
. calculating the "CHECK-SUMS" of the memories and comparing them with those in the
memory,
. checking the memory in all of the addressing zone by writing then reading the values
5555H and AAAAH before re-writing the initial value,
. checking the EEPROM stored memories by calculating the CHECK-SUMS and comparing
them with those stored,
-
checking the drift of the analogue amplifiers,
-
verifying the gain of the analogue-to-digital conversion by checking the results of the
reference voltage conversions,
3-13
MS/M 1.6882-B
EPAC 3100/3500
-
checking the power supply specific to the analogue-to-digital conversion function,
-
checking the counters by comparing them,
-
checking the interrupt management.
The self-test never requires the functions of the EPAC to be
shut-down, nor does it have an adverse effect on them.
3-14
EPAC 3100/3500
MS/M 1.6882-B
BLANK PAGE
MS/M 1.6882-B
EPAC 3100/3500
CHAPTER 4
TOOLS FOR COMMISSIONING
AND MAINTENANCE
OPERATIONS
EPAC 3100/3500
MS/M 1.6882-B
BLANK PAGE
4-1
MS/M 1.6882-B
EPAC 3100/3500
CONTENTS
PAGE
4.1.
HARDWARE TOOLS ___________________________________________________________ 4-4
4.2.
4.2.1.
4.2.2.
4.2.3.
SOFTWARE TOOLS ___________________________________________________________ 4-5
WinEPAC Software ___________________________________________________________ 4-5
The EPAC Software on the Display _____________________________________________ 4-17
Accessing the EPAC from the Protection Access Software & Toolkit software (PAS & T) __ 4-23
4-2
EPAC 3100/3500
MS/M 1.6882-B
BLANK PAGE
4-3
MS/M 1.6882-B
EPAC 3100/3500
This chapter describes the hardware and software tools required to carry out commissioning and
maintenance operations on the EPAC 3100/3500.
The first part lists the tools necessary to carry out the commissioning and maintenance operations
on the EPAC 3100/3500. These tools must be used to test the equipment correctly.
The second part describes the software designed by GEC ALSTHOM P&C to help you configure
the EPAC, analyze the electrical faults on the network and the EPAC internal faults (hardware
and software self-monitoring functions). These functions can be accessed from:
-
the WinEPAC software on a micro-computer in local operation,
-
the front panel display unit,
-
the Protection Access Software and Toolkit (PAS & T) software on a micro-computer via a
KBUS network if this type of communication is installed on the EPAC.
4-4
EPAC 3100/3500
4.1.
MS/M 1.6882-B
HARDWARE TOOLS
To carry out the commissioning and maintenance operations on the EPAC 3100/3500, the
following tools and equipment must be available:
-
a screwdriver set,
-
a pipe wrench set,
-
a multimeter,
-
an injection box:
. GEC ALSTHOM model DLF 210,
. OMICRON model CMC 56 or 156,
. ABB model XS92 A,
-
a PC-type micro-computer operating under MS WINDOWS 3.11 or 95,
-
a printer connected to the parallel port of the PC.
If a test equipment generating transient current values of
over 0.2 In is used when a fault condition is generated, an
error can occur in the directional calculation with the highspeed algorithms. This is because the test boxes sometimes
do not reflect the real fault appearance conditions during
the fault condition. To prevent this from interfering with
verification of the start-up zones, you are advised to inhibit
the high-speed algorithms by setting T1 to 50 ms when
setting zones (high-speed algorithms cannot be used at
over 40 ms). The situation arises with digital injection
boxes. For further details, see the documentation for these
injection boxes.
4-5
MS/M 1.6882-B
4.2.
EPAC 3100/3500
SOFTWARE TOOLS
This sub-division describes the basic principles for using the interactive software designed by
GEC ALSTHOM P&C to manage the functions of the EPAC.
4.2.1.
WinEPAC Software
The EPAC is supplied with two disks containing the WinEPAC software used to manage the
EPAC functions from a PC-type micro-computer.
These functions are organized in five dialogues:
-
the "Settings" dialogue lets you configure the protection functions as well as the automatic
control functions integrated into the EPAC,
-
the "Maintenance" dialogue lets you display the current and past status of the EPAC, thus
making maintenance operations easier,
-
the "Orders" dialogue lets you manage:
. the EPAC date and time,
. the EPAC password,
. the status of the auto-recloser and the associated counters,
. configuration switch-over (4 setting groups),
-
the "Measurements" dialogue lets you display:
. the analogue values measured on the three phases,
. the input/output values for the IO-1 or IO-3 board and for a second additional board, if
appropriate,
-
the "Events" dialogue lets you display reports on faults that have occurred on the line.
A software configuration dialogue lets you adjust the WinEPAC software settings.
Figure 4.2a shows the tree breakdown of the main EPAC management and setting options
available with the WinEPAC software. The first level of the tree breakdown shows the main menu
options.
4-6
EPAC 3100/3500
Level 1
MS/M 1.6882-B
Level 2
Create
Settings
Modify
Orders
System Data
Identification
Communication
Options
Preferences
Hardware
Hardware options
Main
Main functions
Options
Optional functions
Disturbance
Disturbance record
settings
Outputs
Output settings
Inputs
Input settings
Acknowledge
Acknowledge alarms
Records
View fault records
Reset self-tests
Delete maintenance
records
Date
Set date and hour
Password
Setting
Change password
Auto-Recloser
View auto-recloser
status
Counters
Reset counters
Change
Switch configurations
View instantaneous
network values
Measurements
Events
Description
Download
Upload
Maintenance
Level 3
Reset LEDs
Extinguish LEDs
Delete Records
Delete disturbance
records
Read disturbance
records
From relay
Figure 4.2a: Tree Breakdown of the WinEPAC Functions
4-7
MS/M 1.6882-B
EPAC 3100/3500
4.2.1.1. Installing the Software on a Hard Disk
Before the WinEPAC software can be run, it must be installed on the hard disk of your microcomputer.
To install the WinEPAC software on the PC’s hard disk:
1.
Start Windows.
2.
Insert Disk 1 of WinEPAC in drive A:>.
3.
Select Run in the File menu (of Windows 3.11) or the Start menu (of Windows 95).
4.
Type A:SETUP.EXE in the "Command line" field.
5.
Click on OK. Installation begins.
6.
Follow the instructions appearing on the screen.
7.
A "WinEPAC" program group is created once installation has been completed. It contains the EPAC icon used to start the WinEPAC application.
Figure 4.2b: Icon created on the installation of WinEPAC
4-8
EPAC 3100/3500
MS/M 1.6882-B
4.2.1.2. Starting the software
To start the software
1.
Click on the
icon to start the software. The software is loaded into memory. After
a few moments, the first screen is displayed.
Figure 4.2c: WinEPAC First Screen
To quit WinEPAC and return to Windows
1.
Press <Esc> until the EPAC software is deactivated,
or select Quit in the File menu,
or press Alt + F4.
4-9
MS/M 1.6882-B
EPAC 3100/3500
4.2.1.3. Using the Keyboard
Alphanumeric Keys
These keys are used to enter or change settings in entry fields. All keys of the numeric keypad
as well as upper and lower case characters can be used. The software reduces the possibility
of error by inhibiting the entry of:
-
a wrong character (e.g. a letter instead of a number),
-
a numerical value outside the permitted limits.
Control Keys
These keys are used to move the cursor from one entry field to another or to change the value
of an entry field.
Control key
Function
←
Moves the cursor to the left in a data entry field.
→
Moves the cursor to the right in a data entry field.
TAB
Moves highlighting to the next field or button.
Shift+TAB
Moves highlighting to the previous field or button.
<Suppr>
Deletes the character to the right of the cursor when
entering data.
<Insert>
Activates/deactivates the insertion mode when entering
data.
<Del>
Deletes the character below the cursor when entering data.
<Backspace>
Deletes the character to the left of the cursor when entering
data.
<Return>
Validates data, a menu option or deactivates an error
message.
<Esc>
Goes back to the previous screen.
The contents of an entry field are highlighted when the field is active. The value can then be
changed.
4-10
EPAC 3100/3500
MS/M 1.6882-B
4.2.1.4. Using the Mouse
The following table explains the basic terms associated with the use of the mouse.
Action
Meaning
Point
Place the pointer on an element.
Click
Point to an element, then press and release the left mouse
button.
Double click
Point to an element, then press the left mouse button twice
quickly and release it.
The mouse pointer changes its form according to the item it is positioned on. The following table
indicates the two forms of pointer used by the WinEPAC software.
If the pointer is in the form of a capital I
Location
Possible actions
The pointer is in an entry field
Enter text or reposition the insertion point.
If the pointer is in the form of an arrow
Location
Possible actions
The pointer is in a selection field
or non-entry area
Choose options, validate messages.
Entering text
1.
Position the mouse pointer over the entry field required.
2.
Click on the left mouse button. The field is highlighted.
3.
Enter the text.
Selecting an option
1.
Position the mouse pointer over the appropriate button or tab.
2.
Click on the left mouse button. The selected option is activated.
4-11
MS/M 1.6882-B
EPAC 3100/3500
4.2.1.5. Description of a Typical Screen
Each WinEPAC screen consists of several different elements:
Figure 4.2d: Typical Screen
Title Bar
This bar consists of the Minimise, Maximise and Restore icons and the title of the current screen.
The Minimise icon lets you reduce the active window to an icon, the Maximise icon enlarges
the window to its maximum size, and the Restore icon returns it to its original size.
Menu Bar
This bar consists of one or more menus. Each menu lets you access the commands required to
activate particular functions such as exiting from a screen or saving a configuration.
Tool Bar
This bar consists of icons assigned to predefined functions. Click on the icon to activate its
associated function.
4-12
EPAC 3100/3500
Icon
MS/M 1.6882-B
Associated function
Displays a help window.
Tests consistency (also available by pressing F2).
Goes back to the previous screen.
Opens a file from a disk drive.
Saves a file to a disk.
Prints out data.
Working Area
This is the interactive area of the screen. It can include:
-
one or more tabs related to the function selected,
-
fields that may be:
. changeable settings (e.g. setting to select nominal frequency),
. fixed data (e.g. analogue value measured by the EPAC ).
Depending on the settings and software options selected, some data cannot be accessed. These
data appear greyed on the screen. All other settings can be accessed using the mouse and the
keyboard’s control keys.
Button Area
Each button in this bar is associated with a function. Click on the button to access the function.
Message Line
This contains a message about the highlighted field. For adjustable settings, the message
indicates the maximum and minimum values, step and unit to be entered.
4.2.1.6. Using the Software
This paragraph contains the basic instructions for using the WinEPAC software. It describes how
to use the most common commands:
-
moving from one screen to another,
-
changing settings,
-
checking consistency,
-
obtaining contextual help,
-
configuring the software.
4-13
MS/M 1.6882-B
EPAC 3100/3500
Moving from one screen to another
Each software screen has a button associated with it.
To move from one screen to another, click on the appropriate button for the screen you wish to
reach.
To return to the previous screen, press <ESC> or select the icon
on the right of the tool bar.
Main
Screen
WinEPAC
Software
Configuration
EPAC
Main
Management
Screen
Settings
Orders
Main Setting
Screen
Events
Main Event
Screen
Main Order
Screen
Maintenance
Main
Maintenance
Screen
Measurements
Main
Measurement
Screen
Figure 4.2e: Organisation of the Main Screens
4-14
EPAC 3100/3500
MS/M 1.6882-B
Changing a setting
The software has different types of field for entering and changing the settings. The way of
changing a setting varies according to the type of field concerned.
Simple Entry Field
Settings are entered via the keyboard.
To change a setting in a simple entry field:
1.
Select the entry field. The field is highlighted.
2.
Enter the setting.
3.
Press <Enter> to validate the new setting.
Entry or Selection Field
Settings can be entered as described above. They can also be changed using the mouse. To
change a setting in an entry or selection field using the mouse:
1.
Click on the arrows next to the entry field. The setting is then incremented or decremented
by a predefined step. The size of the step is usually indicated in the message line.
2.
Press <Enter> to validate the new setting.
Simple Selection Field
Settings cannot be entered directly. They have to be selected from a list of permitted settings.
To change a setting in a simple selection field:
1.
Click on the arrow to the right of the selection field. The permitted settings appear below
the selection field.
2.
Click on the new setting, which is validated automatically.
Check Box
A check box is used to validate or inhibit the associated function. The function is validated if the
box is checked. If not, it is inhibited.
4-15
MS/M 1.6882-B
EPAC 3100/3500
To change the status of a function:
1.
Click on the box. The status of the function is reversed.
Radio buttons
Radio buttons are used to validate one of the several available functions. To select a function:
1.
Click on the button corresponding to the function you wish to validate. The function
previously selected is invalidated and the function you have checked is validated.
Checking coherency
Each time you change a setting, you should carry out a coherency check to ensure that the
change is compatible with the other settings. The coherency function can be accessed from all
parameter setting screens.
To check coherency:
icon or press F2.
1.
Click on the tool bar
2.
The coherency window appears, indicating any corrections that need to be made to
settings.
3.
Press <ESC> to close the coherency window.
Displaying a help screen
A help screen is available from most entry screen fields. The online help provided gives details
about the function of the current setting.
1.
Select the entry field for the setting. The field is highlighted.
2.
Click on the
icon. The help window is displayed in the working area. The message
line indicates the name of the field the help item refers to.
3.
Press <Esc> to exit from the help screen.
4-16
EPAC 3100/3500
MS/M 1.6882-B
Configuring the WinEPAC software
1.
Access the WinEPAC first screen.
2.
Click on the
icon or select the Preferences option in the Options menu. The software
preferences screen is displayed.
3.
Click on the Language button. The list of available working languages is displayed.
4.
Select the language you wish to use.
5.
Click on the Serial Port button. The port selection screen is displayed.
6
Select serial port COM1 or COM2 used to connect the PC to the EPAC.
7.
Once the software configuration settings are correct, press <ESC> to exit from the screen.
The software’s first screen is redisplayed.
The WinEPAC display language is independent of the
working language adopted for the protection unit. The
latter uses the "EPAC language" configuration setting
defined in Configuration\ System Data\Preferences.
4-17
MS/M 1.6882-B
4.2.2.
EPAC 3100/3500
The EPAC Software on the Display
If the EPAC 3100/3500 is fitted with a display, most configuration and monitoring functions
available from the PC can be accessed from the front panel of the EPAC 3100/3500. However,
the name of the functions, the way the software is used and the user interfaces are different.
Figure 4.2f shows the tree breakdown of the main functions available from the display.
Level 1
Level 2
Level 3
Level 4
PARA
PROT
LIGN
SURV
TELE
PIQU
WEAK
POMP
FFUS
DIVE
DEFD
DEFI
ARC
SYNC
PET
RELU
RELI
COMM
IMP
Line setting parameters
Zone setting parameters
Teleprotection parameters
Tee line parameters
Weak infeed parameters
Power swing parameters
Fuse failure parameters
Miscellaneous parameters
DEF parameters
Back-up protection parameters
Auto-recloser parameters
Synchro-check parameters
ICN parameters
Max U and Min U parameters
Max I parameters
Communication parameters
Local printer parameters
I-O
OUT1
OUT2
INP1
INP2
Board
Board
Board
Board
Resetting LEDs
LEDS
CONF
VALI
DFIN
LIST
EFF
1
2
1
2
outputs
outputs
inputs
inputs
Transmission of the current
configuration
NUM
POST
DEP
OPTC
OPT1
IRIG
LIC1
LIC2
LANG
DIST
DECL
Configuration number
Substation name
Feeder name
AC board present
Additional I/O board present
IRIB-B board present
First licence number
Second licence number
Language used
Distance unit
Distance of fault unit
Change of the configuration
number
ACTI
EVEN
Description
EV1
to
EV10
Fault reports 1 to 10
Deleting records
4-18
EPAC 3100/3500
MS/M 1.6882-B
Level 1
Level 2
Level 3
ETAT
CMD
MAIN
DATE
ARC
Change Auto-recloser
CPTS
Reset the counters
DATE
HEUR
Setting of the date
DF1
to
DF10
Failure structures 1 to 10
ACQU
LIST
PASS
Deleting maintenance records
SAIS
Current password
MODI
New password
Selection of the configuration
to modify
LLIS
EFF
LANG
Setting of the hour
Acknowledge alarms
EFF
CHXCONF
PERT
Description
Instantaneous network
characteristics
Auto-recloser status
MES
ARC
Level 4
PER1
to
PE10
Disturbance records 1 to 10
Delete disturbance records
Display unit temporary
language
Figure 4.2f: Tree Breakdown of the Functions on the Display
4-19
MS/M 1.6882-B
EPAC 3100/3500
4.2.2.1. Display Overview
2 lines of 16 characters
Set
key
SET
Help
Arrow keys
Help key
Figure 4.2g: Display Front Panel
Alphanumeric Display
The display consists of 2 lines of 16 characters.
The first line contains information about the current environment, e.g. the name of the functions
selected to access the current screen.
The second line displays the name of options or parameters that can be selected. When entering
data, the character being changed is underlined. When not entering data, the parameter or the
option that can be directly selected flashes.
The following characters can be displayed:
-
upper or lower case, alphabetical characters without accents,
-
numeric characters,
-
control characters.
Control character
Meaning
—>
other options are available to the right.
<—
other options are available to the left.
/
divider between options used to access the current display.
4-20
EPAC 3100/3500
MS/M 1.6882-B
Keyboard Keys
6 keys can be found below the display. They are used to carry out all the available selection
and configuration operations.
Key
Function
When entering data: moves the cursor onto the next
character;
when not entering data: activates the next option or
parameter on the second line of the display.
When entering data: moves the cursor back to the previous
character;
when not entering data: activates the previous option or
parameter on the second line of the display.
When entering data: selects the previous character or
number;
when not entering data: moves backwards.
When entering data: displays the next character or number;
when not entering data: selects the option or parameter
that flashes on the second line.
SET
Help
When only the main screen is displayed: activates the user
dialogue;
when the user dialogue is already active: confirms a
changed parameter.
Displays a help line that gives details about the menu
option or parameter that is flashing on the second line.
4.2.2.2. Using the Software
This paragraph contains the basic instructions for using the EPAC software program from the
display. This software program can run in two modes:
EPAC 3100/3500 status display mode
The result of the most recent self-test or tripping operation carried out by the EPAC is displayed
by default. A few minutes after the latest screen has been displayed, the display switches off
automatically.
During the state when the EPAC is supplied with power or after quitting the user dialogue mode,
the software version of the product is displayed together with the self-test result.
User dialogue mode
This mode lets you use the display to configure and monitor the functions carried out by the EPAC.
It is similar to the dialogue available from the EPAC software on PC.
4-21
MS/M 1.6882-B
EPAC 3100/3500
Activating the user dialogue
1.
key. The first three menu options available are displayed on the second line
Press the
before the —> character which indicates that other options are available to the right.
The first option flashes.
SET
EPAC 3000
LEDS CONF EVEN
>
SET
Help
Figure 4.2h: Main menu on the display
Selecting a menu option
1.
Move the flashing area onto the option to be selected using the arrow keys.
2.
Press the
key. The first option or the first available parameter from the selected
option flashes.
Selecting a parameter
1.
Move the flashing area onto the parameter to be changed using the arrow keys.
2.
Press the
key. The parameter name, its setting and type of unit are displayed on the
second line.
Changing a parameter setting
1.
Select the parameter to be changed.
2.
Press the
3.
Choose the correct character using the
4.
Press the
5.
Proceed as indicated in steps 2, 3 and 4 for all the characters to be changed.
6.
Press the
SET
key. The first character that can be changed is underlined.
and
keys.
key. The next character is now underlined.
SET
key to confirm the new parameter setting.
4-22
EPAC 3100/3500
MS/M 1.6882-B
Validating a configuration
1.
key several times to return to level 1. The CONF EVEN MES options should
Press the
be displayed in the second line.
2.
Select the CONF option, then press the
3.
Select the PARA option, then press the
4.
Select VALI.
5.
Validate the configuration number by pressing the
6.
Enter the password if requested.
key.
key.
SET
key.
The default password is USER.
Displaying a help line
1.
Press the
key. A help line is displayed on the second line. This help gives details
about the parameter being changed.
2.
Press the
Help
Help
key again to exit the help function.
Selecting the dialogue language
1.
Choose the LANG option. The available dialogue languages are displayed on the second line.
2.
Choose the required dialogue language.
3
Enter the password in option PASS.
The PARA/LANG option corresponds to the EPAC’s working language. It is only taken into account when the active
configuration is uploaded. The display unit viewing language can be taken into account immediately, however,
by entering the EPAC/Langage setting. This setting is taken
into account until reception of the next status report from the
protection unit.
4-23
MS/M 1.6882-B
4.2.3.
EPAC 3100/3500
Accessing the EPAC from the Protection Access Software & Toolkit software (PAS & T)
The Protection Access Software & Toolkit software has been designed by GEC ALSTHOM T&D
P&C to manage K relay parameters. The EPAC can include an optional COURIER communication management function that can be accessed with this software.
The commands available from this external program are described in separate documentation
entitled "User Manual-Protection Access Software & Toolkit".
The following figure shows the software’s main window.
ALSTOM
Access
T&D Protection
Control
Records
& Control
Units
Protection
Options
Access
Software
& Toolkit
Quit
V2.00
Help
About Program
ALSTOM
Protection
<C> Copyright
T&D
Protection
Access Software
Version 2.00
03/02/94
GEC ALSTHOM
& Control
& Toolkit
T&D Protection
& Control
OK
Num.
Units = 5[
5]
√
TAEOD
DR ES EP PP ONLINE
1
BACKGROUND
Figure 4.2i: Main Window of "Protection Access Software & Toolkit"
Selecting the EPAC to be set
If the EPAC has no address
The EPAC’s address can either be selected automatically by COURIER or be selected by the user.
In automatic addressing mode, COURIER assigns the EPAC the first address available.
a)
Automatic addressing by COURIER
a1.
Select the "Turn Auto Addr On" command in the Units menu. The command changes
to "Turn Auto Addr Off", indicating that it is active.
a2.
Select the "New Address" command in the same menu. The "Enter Serial No."
dialogue box appears.
a3.
Enter the EPAC serial number, then press <Enter>. The "Enter Old Relay Address"
dialogue box appears.
a4.
Press <Enter> to validate the "255" address that appears by default (standard
configuration). The "Enter New Relay Address" dialogue box appears.
a5.
Validate the "0" default address that appears. COURIER assigns the EPAC an
available address.
a6.
Press <Enter> to validate the new EPAC address.
4-24
EPAC 3100/3500
b)
MS/M 1.6882-B
Manual addressing by the user
b1.
Select the "New Address" command in the Units menu. The "Enter Serial No."
dialogue box appears.
b2.
Enter the EPAC serial number, then press <Enter>. The "Enter Old Relay Address"
dialogue box appears.
b3.
Press <Enter> to validate the "255" default address that appears (standard configuration). The "Enter New Relay Address" dialogue box appears.
b4.
Enter the required address. COURIER assigns the EPAC an available address.
b5.
Press <Enter> to validate the new EPAC address.
If the protection unit already exists and has an address
1.
Select the Access menu. The list of available relays is displayed.
2.
Highlight the EPAC you wish to reach, then press <Enter>. Once the link with the protection unit is established, the list of available setting groups is displayed. Each item in the
list gives access to a list of settings that can be viewed and changed.
Changing a setting
1.
Select the relay whose setting you wish to change (cf. last procedure).
2.
To retrieve the EPAC configuration, select the option SET Active Setg: Retrieve=[0] from
the SETTING COMMANDS column.
3.
Activate the "Reset Cell Locn" command.
4.
Select the setting to be changed using the ↑ and ↓ keys, then press <Enter>. A command
menu appears:
CELL MENU
Change setting S
Add Poll Item A
Delete Poll Item D
Reset Cell Locn R
View Strings V
Cancel
ESC
Figure 4.2j: Command Menu
4-25
MS/M 1.6882-B
EPAC 3100/3500
Function
Description
Change setting
Changes a setting.
Add Poll Item
Adds the setting to the list of settings whose instantaneous
values you want displayed.
Delete Poll Item
Deletes the setting from the list of settings whose instantaneous values you want displayed.
Reset Cell Location
Validates the selected command if it ends in [0].
View strings
Displays correspondences between settings and functions.
Cancel
Exits.
5.
Select the Change Setting option.
6.
Change the setting.
7.
Validate with Ctrl-F10.
8.
To upload the configuration:
8a.
Select the SYS Password option in the SYSTEM DATA column, then enter the EPAC
password.
8b.
Select the SET Current Setg: Save=[0] option in the SETTING COMMANDS column.
8c.
Validate the Reset Cell Location command.
The following table describes the main features of the software menus. For further details on
software use, see the documentation "User Manual - Protection Access Software & Toolkit".
Menu
Description
Access
Displays the list of protection relays recognised by the
software and establishes a link with one of them.
Polling
To view dynamic changes in certain settings.
Control
To switch over the relay configuration.
Records
To save the relay’s settings and fault disturbance data.
Units
To manage the list of addresses of relays that can be set
from the software.
Options
To change and save the following options to disk:
Quit
-
parameters for communicating with relays,
-
display parameters,
-
activation of the background task used to download
fault disturbance data,
-
change to debugging mode in case of problems, to
view all messages concerned with communications.
To exit from the software.
4-26
EPAC 3100/3500
MS/M 1.6882-B
BLANK PAGE
MS/M 1.6882-B
EPAC 3100/3500
CHAPTER 5
COMMISSIONING
EPAC 3100/3500
MS/M 1.6882-B
BLANK PAGE
5-1
MS/M 1.6882-C
EPAC 3100/3500
CONTENTS
PAGE
5.1.
5.1.1.
5.1.2.
5.1.3.
PRELIMINARY CHECKS ________________________________________________________
Mechanical Checks ___________________________________________________________
Checking the Nominal Values __________________________________________________
Checking Connections _________________________________________________________
5.2.
ENERGIZATION _____________________________________________________________ 5-10
5.3.
CHECKING THE STATUS OF THE EPAC 3100/3500 ________________________________ 5-10
5.4.
5.4.1.
EPAC CONFIGURATION ______________________________________________________ 5-11
Configuration Management ___________________________________________________ 5-11
Changing the Password ______________________________________________________ 5-12
Selecting a configuration (Setting Group) ________________________________________ 5-14
Transferring a configuration to the EPAC ________________________________________ 5-16
Changing configurations _____________________________________________________ 5-18
Saving and printing a configuration ____________________________________________ 5-20
Preparing a configuration ____________________________________________________ 5-21
Changing the communication parameters _______________________________________ 5-24
Changing the basic configuration parameters ____________________________________ 5-28
Configuring the Functions of the EPAC __________________________________________ 5-30
Changing the line parameters _________________________________________________ 5-32
Changing the teleaction parameters ____________________________________________ 5-35
Changing the Zone Setting Parameters _________________________________________ 5-38
Changing the teleaction parameters for a tee line ________________________________ 5-42
Changing the Weak Infeed Parameters _________________________________________ 5-45
Changing the Miscellaneous Parameters ________________________________________ 5-47
Changing the fuse failure parameters __________________________________________ 5-49
Configuring the software functions _____________________________________________ 5-51
Changing the Power Swing Parameters _________________________________________ 5-53
Changing the High Resistance Earth Fault Parameters _____________________________ 5-56
Changing the Parameters of the Automatic Recloser Control _______________________ 5-59
Changing the Synchrocheck Parameters ________________________________________ 5-62
Changing the Parameters of isolated or compensated network (RNI) protection _______ 5-65
Changing the parameters of Sensitive Directional Earth Fault
protection __________________________________________________________________ 5-67
Changing the MaxI, MaxU and MinU Protection Parameters _______________________ 5-70
Changing the disturbance recording parameters _________________________________ 5-73
Assigning the digital Inputs/Outputs ___________________________________________ 5-76
Checking Configuration Consistency ____________________________________________ 5-80
5.4.2.
5.4.3.
5-4
5-4
5-5
5-6
5.5.
CHECKING THE RESULTS OF THE ANALOGUE VALUES ____________________________ 5-82
5.6.
5.6.1.
5.6.2.
CHECKING THE PROTECTION AND AUTOMATIC CONTROL FUNCTIONS _____________ 5-84
Fault Analysis Tools __________________________________________________________ 5-84
Functional Tests _____________________________________________________________ 5-88
5-2
EPAC 3100/3500
MS/M 1.6882-C
BLANK PAGE
5-3
MS/M 1.6882-C
EPAC 3100/3500
This chapter describes the complete commissioning procedures for the EPAC 3100/3500.
The first part describes the various checks to be carried out before the equipment is energized,
in particular, the configuration corresponding to the rated characteristics and the input/output
connections.
The second part describes the energization procedure and the first checks to be carried out to
make sure the EPAC is operational.
The third part describes the configuration of the EPAC. This configuration enables the operator
to adapt the EPAC functions to the electrical environment.
The fourth part describes all the tests used to check that the EPAC built-in protection and automatic
control functions operate correctly.
5-4
EPAC 3100/3500
5.1.
MS/M 1.6882-C
PRELIMINARY CHECKS
The first step of the EPAC 3100/3500 commissioning procedure is to check that all the
connections are correctly made and the pre-configuration of the steady state characteristics is
well suited to the electrical environment.
5.1.1.
Mechanical Checks
Do the following to check that the boards inside the EPAC 3100/3500 are correctly connected:
1.
Remove the plastic cover.
2.
Unlatch the front panel by loosening the milled screw located at the right hand side of
the door.
3.
Rotate the front panel to the left.
4.
Check:
-
the location of the boards,
-
the ribbon cable insertion.
IO-1 or IO-3 board
Connection AC board
cable
TMS board
Flat-top link
TMS-IO
Converter
board
Door
IRIGB board
TMS-QTF
QTF board
Add. IO-2/IO-1/IO-3 board
Figure 5.1a: Board Interconnections
5-5
MS/M 1.6882-C
5.1.2.
EPAC 3100/3500
Checking the Nominal Values
5.1.2.1. Rated Current Value at the Secondary Circuit
The rated current can be either 1 A or 5 A. You can select one of these two values by moving
the connector button. Check that the indication corresponds to the desired rating. If not, loosen
the nuts to invert the tabs. Refer to the enclosed Installer’s Guide.
5.1.2.2. Converter Power Supply Voltage
The voltage level is written on the left of the EPAC 3100/3500 front panel. Check that this value
complies with the power supply voltage provided.
5-6
EPAC 3100/3500
5.1.3.
MS/M 1.6882-C
Checking Connections
5.1.3.1. Analogue Input Connections
The current and voltage analogue inputs are connected to terminal block X5 as described in the
following figures.
Tore
P2
P1
S2
IL1
S1
P2
P1
S2
S1
P2
IL2
S2
P1
S1
IL3
UL1
P1 P2
UL2
UL3
P1 P2
P1 P2
To BCH
S1
2
1
4
3
ILE1
5
ILS1 ILE2
IL1
6
ILS2 ILE3
IL2
7
8
ILS3
INS
IL3
10
INE
UL1
IN
S2 S1
S2 S1
9
UL2
15
14
UL3 UbusbarE
UL2
UL1
13
12
11
UN
S2
UbusbarS ITMHE ITMHS
UBAR
UL3
16
TMH
Figure 5.1b: Analogue Input Connections with CT core balance
P2
P1
S2
IL1
S1
P2
P1
S2
IL2
S1
P2
S2
P1
S1
IL3
UL1
P1 P2
S1
2
1
ILE1
IL1
4
3
ILS1 ILE2
IL2
5
6
ILS2 ILE3
IL3
7
8
ILS3
INS
IN
UL1
9 11
UN
UL1
UL3
P1 P2
S2 S1
S2 S1
10
INE
UL2
P1 P2
UL2
UL2
S2
12
To BCH
13
14
UL3 UbusbarE
UL3
15
16
UbusbarS ITMHE ITMHS
UBAR
TMH
Figure 5.1c: Analogue Input Connections with Holgreen connection
5-7
MS/M 1.6882-C
EPAC 3100/3500
EPAC 3100/3500
TMH S
TMH E
U BarS
bar
U BarE
2
4
UL2
UL3
UN
UL1
6
8
10
12
16
INE
INS
INE
INS
18
IL E3
IL S3
If IN = 5A
20
IL E3
IL S3
If IN = 1A
22
IL E2
IL S2
If IN = 5A
24
26
IL
IL
IL
IL
28
IL E1
IL S1
14
E2
S2
E1
S1
X5
If IN = 5A
If IN = 1A
E: Input
S: Output
If IN = 1A
If IN = 5A
If IN = 1A
QTF Board
Screw-in
connector
Figure 5.1d: EPAC 3100/3500 Analogue Input Connections
Equipment fault signals are connected on connector X6
between terminals 9 and 10 of IO-1 or IO-3 board and
between terminals 15 and 16 of additional IO-1 or IO-3
or IO-2 board.
5.1.3.2. Earthing
A nut located on the lower right-hand side of the EPAC 3100/3500 rear panel is used for
earthing.
An additional nut, located on the bottom left-handside of the rack, is used to connect grounding
wires for current loop and/or K-BUS cable if these options are installed.
5.1.3.3. Logic Input/Output Connections
The logic inputs/outputs are connected to the X1 to X4 sockets of the input/output boards. These
sockets are designed to receive standard Midos terminal blocks.
Some of the contacts on these boards are pre-allocated whereas others can be allocated to
inputs/outputs with the user’s dialog (refer to the paragraph entitled "Assigning the Inputs/
5-8
EPAC 3100/3500
MS/M 1.6882-C
Outputs"). Connections between these boards are indicated in the appendix.
In its basic version, the EPAC 3100/3500 is only fitted
with the IO-1 or IO-3 board. An additional IO-1 or IO-3 or
IO-2 board can be inserted if extra inputs/outputs are to be
interfaced.
Use the EPAC 3100/3500 connection layout to check the
assignment of the logic inputs and outputs.
5.1.3.4. Power Supply Connections
The power supply is connected to terminals 27 and 28 of the X6 connector.
27
28
- Power Supply
+ Power Supply
X6 Connector
Figure 5.1e: Power Supply Connections
5.1.3.5. Connection to an External System and to External Time Synchronisation
These connections are made via the rack front panel connectors for the RS 232 connector and
the rack rear panel connectors for all other connections. The type of connectors available
depends on the configuration options selected.
Options selected
Connector
Location
TPE disturbance recording
TERMINAL 1
EPAC front panel
VDEW
D24 receiver
D25 transmitter
EPAC rear panel
K-BUS COURIER
D26
EPAC rear panel
Current loop
X18
EPAC rear panel
MODEM link
X20
EPAC rear panel
IRIGB time synchronisation
X30
EPAC rear panel
D26
X6
X1
X3
X2
X4
NC
X6
X1
X3
X2
X4
X5
X5
Current loop
KBus link
To UR
Protection cable
Protection cable
Figure 5.1f: Ground Point Connections
X18
5-9
MS/M 1.6882-C
EPAC 3100/3500
Rear view (IRIG-B, Modem and KBUS-COURIER options)
X6
1
2
X1
X3
27
1
27
1
28
2
28
2
27
1
27
1
28
2
28
2
X2
X4
D26
X5
27
28
27
1
28
2
X1
X3
X6
X2
X4
X30
X5
X20
Rear view (IRIG-B, Current loop and VDEW options)
X6
1
2
X1
X3
27
1
27
1
28
2
28
2
27
1
27
1
28
2
28
2
X2
X4
D24
X5
27
28
27
1
28
2
D25
X6
X1
X3
X2
X4
X30
X5
X18
Front view
TERMINAL 1
TERMINAL 2
Figure 5.1g: EPAC Option Connections
5-10
EPAC 3100/3500
5.2.
MS/M 1.6882-C
ENERGIZATION
Energize the EPAC. The function management program of the EPAC which is run automatically,
first performs a complete self-test. The self-test results are indicated by front panel lights. More
details on the results can be accessed from the WinEPAC software or from the display.
At energization, the EPAC protection function takes a few
seconds to stabilize before becoming operational.
5.3.
CHECKING THE STATUS OF THE EPAC 3100/3500
The front panel lights should be as follows:
-
the light "RELAY AVAILABLE" should flash,
-
the other lights should be off.
EPAC 3000 Vx.x x
PROTECTION OK
If this is not the case, refer to Chapter 6.
5-11
MS/M 1.6882-C
5.4.
EPAC 3100/3500
EPAC CONFIGURATION
Some parameters of the EPAC protection and automatic control functions can be adapted to the
environment in which the EPAC operates.
This sub-chapter describes:
-
EPAC configuration management,
-
the configuration of the protection and automatic control functions provided by the EPAC,
-
the input/output assignment.
Configuration procedures are described for:
5.4.1.
-
the WinEPAC software on a micro-computer connected to the EPAC front panel,
-
the EPAC front panel display software,
-
the Protection Access Software & Toolkit software from a central location via the K-BUSCOURIER network.
Configuration Management
The configuration of the EPAC can be modified, allowing the user to adapt its settings to the
characteristics of the network it is monitoring. The EPAC comes with the option of four
configurations stored in memory. These can all be modified, and can replace the current
configuration if required.
A password must be entered before the active configuration can be modified.
The following pages describe how to:
-
enter the password,
-
select a configuration,
-
transfer a configuration to the EPAC,
-
switch setting groups,
-
save and print out a configuration,
-
prepare a configuration to be modified or created.
5-12
EPAC 3100/3500
MS/M 1.6882-C
CHANGING THE PASSWORD
Description
The password protects access to the EPAC. It is required to:
-
switch from one configuration to another,
-
change auto-recloser status,
-
reset auto-recloser counters,
-
change the password,
-
load a configuration into the EPAC,
-
acknowledge alarms after a shutdown caused by a failure detected by self-test procedures.
The EPAC is delivered with the default password "USER".
The password can be changed by the user.
Changing the Password
From the WinEPAC software
1.
Click on the Orders button of the EPAC main management screen. The EPAC’s current
status is displayed.
2.
Click on the Password Setting button. The password change window is displayed. A
message prompts the user to enter the current password and the new password.
Figure 5.4a: Password change Window
To protect the password, the characters appear as asterisks
when the password is entered.
3.
Click on the OK button when the passwords have been correctly entered. The user is
asked to confirm the new password entry.
5-13
MS/M 1.6882-C
4.
EPAC 3100/3500
The PC queries the EPAC to check that the registers of the two items of equipment are
consistent with one another. If the result is positive and the current password entered by
the user is correct, the new password becomes the current EPAC password.
From the EPAC display
in the initial contents of the display/display configuration.
1.
Press
2.
Select the PASS option, then the SAIS option.
3.
Press
4.
Enter the current password using the arrow keys:
SET
SET
.
Keys
5.
Use
and
to scroll through the letters and select a password character.
and
to move the cursor to the following or preceding character.
If the password entered is correct, the MODI option is activated. Select this option and
enter the new password, which automatically becomes the current EPAC password.
The password entered from the display remains visible until
automatic exit from configuration mode (5 minute timeout). The display is no longer in configuration mode once
the display screen has switched off.
From the Protection Access Software & Toolkit software
1.
Select the SYSTEM DATA column.
2.
Select the SYS PASSWORD setting in the ACCESS CELL LIST window.
3.
Enter the current password.
4.
Return to the SYS PASSWORD field and enter the new password. The new password
becomes effective once it has been validated.
!
COURIER will not accept a new password if it is the same
as the current password.
There is no confirmation of the new password entry.
5-14
EPAC 3100/3500
MS/M 1.6882-C
SELECTING A CONFIGURATION (SETTING GROUP)
Description
An existing or standard configuration should be selected before changing any settings.
Configuring the EPAC is then in most cases simply a matter of changing a few settings in the
selected configuration.
Selecting a Configuration
From the WinEPAC software
The following can be selected from the PC:
-
the current EPAC configuration (or one of the four EPAC configurations),
-
a configuration saved on hard disk or diskette,
-
a standard configuration used as the basis for creating a new configuration.
1.
2.
Access the EPAC main management screen.
Click on the Settings button. The configuration module screen is displayed.
Loading the EPAC configuration:
3.
Click on the Download button. The active EPAC configuration is loaded into the memory.
The main setting screen is displayed.
The number of the configuration to be uploaded is requested.
4.
Once the new configuration has been loaded, the main setting screen is displayed.
Loading the standard configuration:
5.
Click on the Create button. The standard configuration is loaded into the memory.
6.
Once the new configuration has been loaded into memory, the main setting screen is
displayed.
5-15
MS/M 1.6882-C
EPAC 3100/3500
Opening a configuration saved on hard disk or diskette:
7.
Click on the
played.
icon. The screen for selecting the location of the configuration is dis-
8.
Select the required configuration, then click on OK.
Configurations on hard disk are put in files with a CNF
extension (e.g. the name of the standard configuration is
STANDARD.CNF).
9.
Once the new configuration has been loaded into the memory, the main setting screen
is displayed.
From the EPAC display
You can select one of the 4 configurations available:
1.
Access the main menu.
2.
Select the CONF and PARA menus. The CHXCONF menu is displayed.
3.
Select the number of the configuration to be downloaded.
From the Protection Access Software & Toolkit software
1.
Select the SETTING COMMANDS column.
2.
Assign the value Retrieve=[0] to the SET Active Setg parameter.
3.
Activate the "Reset Cell Locn" command. The active EPAC configuration is retrieved.
The Active Setg Retrieve=[0] command can also be used
to abort modifications in progress and retrieve the current
EPAC configuration.
5-16
EPAC 3100/3500
MS/M 1.6882-C
TRANSFERRING A CONFIGURATION TO THE EPAC
Description
This function is used to transfer a modified configuration to the memory of the EPAC.
Transferring a Configuration to the EPAC
From the WinEPAC software
1.
Select the Upload option from the configuration module screen. The transfer screen is
displayed. This screen indicates the name of the substation and the outgoing feeder.
2.
Enter the password in the PASSWORD field.
3.
Click on the OK button to validate the transfer order. WinEPAC checks the consistency
of the configuration registers. If the result is positive and the password is correct, the
configuration is loaded into the EPAC. In this case, the EPAC stops and carries out a
complete initialisation self-test before restarting and displaying the self-test result. If the
parameter group option is installed, the loading of configuration group 0 stops the
EPAC and is followed by initialisation a complete self-test.
If the consistency check detects a serious error, the upload
is inhibited. If it detects a minor error, the upload is
permitted.
From the EPAC display
several times until the PARA option is displayed on the second line.
1.
Press
2.
Select the VALI option.
3.
Enter the password. If the password is correct, the configuration in the memory of the
display unit is sent to the EPAC.
5-17
MS/M 1.6882-C
EPAC 3100/3500
From the Protection Access Software & Toolkit software
1.
2.
Select the SETTING COMMANDS column.
Assign the value SAVE=[0] to the SET Current Setg parameter.
Transmission is refused if the password has not yet been
entered. It should have been entered in SYSTEM DATA/
SYS Password.
!
3.
There is a 2 minute timeout for password entry.
Activate the "Reset Cell Locn" command. The configuration is uploaded to the EPAC and
becomes the active configuration.
5-18
EPAC 3100/3500
MS/M 1.6882-C
CHANGING CONFIGURATIONS
Description
This function is used to change from one configuration identified by a number to another
configuration identified by another number.
Changeover from one configuration to another can be
forced from the digital inputs. The Cfg0 and Cfg1 are used
to convert the number of the configuration to be activated
into binary code.
Changing Configurations
From the WinEPAC software
1.
Click on the Orders button of the EPAC main management screen. The Orders screen
appears.
2.
Click on the Change button. The configuration change screen appears.
3.
Select the configuration to be activated in the second zone then click on the
button. The password entry window appears.
4.
Enter the password, then click on OK.
5.
WinEPAC checks the consistency of the configuration registers. If the result is positive
and the password is correct, the selected configuration becomes the active EPAC configuration. In this case, the EPAC stops and carries out a complete initialisation self-test
before restarting and displaying the self-test result.
From the EPAC display
several times until the PARA option is displayed on the second line.
1.
Press
2.
Select the ACTI option.
3.
Select the number of the configuration to be activated.
4.
A message prompts the user to enter the password if this has not already been done.
5.
If the password is correct, an OK message appears.
The configuration selected becomes the active configuration.
5-19
MS/M 1.6882-C
EPAC 3100/3500
From the Protection Access Software & Toolkit software
1.
Select Change Setting Group in the Control menu. The list of relays and the number of
their active configuration are displayed.
2.
Select the EPAC whose configuration you wish to change. The window for selecting the
number of the configuration to be activated is displayed.
3.
Select the number of the configuration to be activated.
4.
Press Control + F10 to confirm the change of configuration.
To change configuration for all relays, select the ALL
RELAYS label at address 255.
The password is not essential if changing configurations
via COURIER.
5-20
EPAC 3100/3500
MS/M 1.6882-C
SAVING AND PRINTING A CONFIGURATION
Description
These functions are used to:
-
manage the configuration files on hard disk or diskette,
-
print out the settings for a configuration.
These functions can only be accessed via the WinEPAC
software.
Saving a Configuration
1.
Click on the
button of the configuration module screen. The configuration save
window is displayed. This window is used to indicate the disk drive and root directory in
which the configuration should be saved, and the name to be assigned to it.
2.
Select the disk drive and directory in which the configuration should be saved.
3.
Enter the configuration file name (8 characters maximum).
4.
Click on OK. The current configuration is saved in the specified directory.
Printing a Configuration
1.
Click on the
displayed.
2.
To configure the printout:
3.
button of the configuration module screen. The printout window is
2a.
Click on the Options button. The printout configuration window is displayed.
2b.
When the printout is correctly configured, click on the OK button. The configuration window disappears.
Click on the Print button. The data is transmitted to the printer.
5-21
MS/M 1.6882-C
EPAC 3100/3500
PREPARING A CONFIGURATION
Description
After commissioning, the software must be configured in accordance with the characteristics
selected.
Software functions cannot be changed. Hardware options
for your EPAC can be selected or deselected via the
WinEPAC software.
Selecting the Hardware and Software Options
From the WinEPAC software
Identifying the protection device:
1.
Click on the System Data button. The EPAC identification screen is displayed.
Figure 5.4b: EPAC System Data Screen
5-22
EPAC 3100/3500
3.
MS/M 1.6882-C
Enter the name of the substation and the outgoing feeder, plus your licence numbers for
the protection device to be configured.
Displaying the software functions:
1.
Click on the System Data button of main setting screen.
2.
Click on the Options button. The software functions selection screen is displayed. This
screen is used to view the functions installed on the EPAC.
Selecting the hardware options:
1.
Click on the Hardware button of the software’s main setting screen.
2.
The hardware option selection screen is displayed. This screen is used to select the
optional boards actually installed on your EPAC.
Boards cannot be selected unless the EPAC has been
configured for them. Those not available appear greyed on
the screen. The EPAC's board configuration varies according to the model.
From the EPAC display
Displaying the hardware options:
1.
Select the CONF, PARA, then DFIN menus. The parameters are displayed on the second
line.
2.
Set the Opt1 option according to the condition whether or not the supplementary I/O
board is installed.
3.
Set the Irig option according to the condition whether or not the IRIGB board is installed.
4.
Enter the substation name in the Post variable.
5.
Enter the name of the outgoing feeder protected by the EPAC in the Dep variable.
The front panel display can only be used to view or change
the first eight characters of the substation and outgoing
feeder names.
The software and hardware option parameters are
configured by the manufacturer.
5-23
MS/M 1.6882-C
EPAC 3100/3500
From the Protection Access Software & Toolkit software
Displaying the software options:
1.
Select the SOFTWARE OPTIONS column. The parameters for the software options installed on EPAC are displayed. The options installed are marked ON. The options not
installed are marked OFF.
Displaying the hardware options:
1.
Select the HARDWARE SETTING column. The hardware options are displayed. They
indicate whether the AC, supplementary I/O and IRIGB boards are present. The boards
installed are marked ON. The boards not installed are marked OFF.
The AC board is always shown as present, as the EPAC
cannot be accessed via K-BUS-COURIER without it.
The hardware options cannot be changed via the Protection Access Software & Toolkit software.
5-24
EPAC 3100/3500
MS/M 1.6882-C
CHANGING THE COMMUNICATION PARAMETERS
Description
There are three optional communication modes available:
-
TPE mode: to exchange disturbance recording data by Modem or current loop,
-
VDEW mode: to conduct substation control operations via a fibre optic link,
-
COURIER mode: to conduct substation control operations via the KBUS interface.
Some Advice on How to Set the Parameters
Setting Baud Rates
The baud rates for the master control computer and the EPAC should be the same.
Selecting the Time Synchronisation Mode
When using the TPE option, you can deselect time synchronisation by the IRIG B board and use
the UR for time synchronisation, instead.
Accessing the Communication Parameters
From the WinEPAC software
1.
Click on the Communication button of the Configuration - System Data screen. The
communication parameters screen is displayed.
5-25
MS/M 1.6882-C
EPAC 3100/3500
Figure 5.4c: Communication Parameters Screen
Setting TPE communication mode:
2.
Click on the TPE button. The TPE communication parameters are displayed:
-
EPAC address,
-
Synchronisation by UR,
-
Telephone number,
-
Modem initialisation sequence,
-
Baud rate.
The telephone number serves as a password to let the EPAC
recognise the UR.
Setting VDEW communication mode:
2.
Click on the VDEW button. The VDEW communication parameters are displayed:
-
Protection address,
-
Baud rate.
5-26
EPAC 3100/3500
MS/M 1.6882-C
Setting COURIER communication mode:
2.
Click on the COURIER button. The COURIER communication parameters are displayed:
-
Protection address,
-
Protocol version,
-
Functions selected.
Only the address can be changed. The other parameters
are given for information only and indicate the functions
authorised in the COURIER version.
From the EPAC display
To access the communication parameters, select the CONF, PARA, PROT and COMM options.
The communication parameters are displayed.
Setting TPE communication mode:
1.
The two parameters that can be changed are:
-
AdUA, the EPAC address,
-
BMod, the Modem baud rate (not used if communication is by current loop).
Setting VDEW communication mode:
1.
The two parameters that can be changed are:
-
AVde, the EPAC address,
-
BKBs, the baud rate.
Setting COURIER communication mode:
1.
The only parameter that can be changed is ACou, the EPAC address.
5-27
MS/M 1.6882-C
EPAC 3100/3500
From the Protection Access Software & Toolkit software
Setting COURIER communication mode:
1.
Select the SYSTEM DATA column.
2.
The SYS Rly Address parameter is displayed.
The Units/New address command can also be used to
change the EPAC address. In this case the new address is
not refreshed in the MMI and the configuration must be sent
to the EPAC again to save it.
VDEW mode cannot be set from this software as VDEW
and KBUS are mutually exclusive.
Setting TPE communication mode:
1.
Select the TPE PARAMETERS column.
2.
The TPE communication parameters are displayed:
-
Synchr by UR,
-
EPAC Addr UR,
-
Baud rate,
-
Phone number,
-
Modem Init.
5-28
EPAC 3100/3500
MS/M 1.6882-C
CHANGING THE BASIC CONFIGURATION PARAMETERS
Description
Four types of basic configuration parameter can be changed:
-
the language used by the EPAC,
-
the fault distance unit,
-
the line length unit,
-
the type of local printer installed.
Some Advice on How to Set the Parameters
Setting the Fault Distance Unit
The unit selected appears in the local fault report printouts and on the display. Fault reports
displayed by the WinEPAC software give fault distances in all units.
Selecting the Printer Driver
If the printer to be installed is not mentioned in the list of available printer drivers, select the driver
indicated as being compatible in the printer documentation.
Accessing the Basic Configuration Parameters
From the WinEPAC software
1.
Click on the System Data button of the main setting screen.
2.
Click on the Preferences button. The basic configuration parameters screen is displayed.
3.
Select the language, the fault distance and line length units and local printer type.
5-29
MS/M 1.6882-C
EPAC 3100/3500
Figure 5.4d: Configuration - System Data Screen
From the EPAC display
Setting the language and the fault distance and line length units:
1.
Select the CONF and PARA options, then the DFIN option.
2.
The parameters that can be changed are:
-
LANG for the language used by the EPAC,
-
Decl for the fault distance unit,
-
Dist for the line length unit.
Setting the local printer type:
1.
Select the CONF, PARA and PROT options, then the IMP option.
2.
Select the Type parameter. The available printer drivers are displayed.
3.
Select the local printer driver.
From the Protection Access Software & Toolkit software
Setting the local printer type
1.
Select the LOCAL PRINTER column.
2.
The printer type parameter is displayed.
5-30
EPAC 3100/3500
5.4.2.
MS/M 1.6882-C
Configuring the Functions of the EPAC
These are the standard functions installed on the EPAC. They consist of:
-
the line characteristics function,
-
the teleprotection function,
-
the zone setting function,
-
the tee line function,
-
the weak infeed function,
-
the miscellaneous parameters function,
-
fuse failure,
-
the input/output function.
They can be accessed using the buttons of the setting screen for the standard functions.
Accessing the setting screen for the standard functions
From the WinEPAC-MMI software
1.
Select the main setting screen.
2.
Click on the Main button. The Settings - Main screen is displayed.
Figure 5.4e: Settings - Main Screen
5-31
MS/M 1.6882-C
EPAC 3100/3500
From the EPAC display
1.
Activate the configuration to be modified.
2.
Select the CONF, PARA and PROT options one after the other from the main menu.
./ CONF / PARA /PROT
LIGN SURV TELE ---->
SET
Help
Figure 5.4f: Menu for Selecting the Parameters on the Display
From the Protection Access Software & Toolkit software
This software does not have a data column grouping
together all the standard protection functions. The parameters for each standard function are contained in columns
grouping together a particular type of data.
Unauthorised functions and options do not appear on the
main screen.
5-32
EPAC 3100/3500
MS/M 1.6882-C
CHANGING THE LINE PARAMETERS
Description
These parameters define the following characteristics of the EPAC line:
-
the rated value of the analogue variables as measured at the reducer secondary circuit,
-
the reduction coefficients for the voltage and current reducers,
-
the length of the line to be protected, in km or miles,
-
the line positive and zero sequence impedances.
Some Advice on How to Set the Parameters
How can the rated value of the analogue variables be checked?
The rated value of the analogue variables must be consistent with the configuration of the
acquisition board and with the indications written on the EPAC front panel.
What line impedances should be indicated?
The following are the line impedances representative of the line to be protected:
-
the positive sequence impedance, Z1,
-
the zero sequence impedance of zone 1, Z01,
-
the zero sequence impedance of zones 2, 3, 4 and 5, Z02.
How can the impedances be calculated?
The impedances must be indicated in low voltage (LV) Ohms for 100% of the line.
The WinEPAC-software is used to indicate the following values:
-
the impedances in cartesian co-ordinates,
-
the impedances in polar co-ordinates,
-
the positive sequence impedance and the earth coefficients for zone 1 and for the other
zones, K01 and K02.
The earth coefficients K01 and K02 are calculated as follows:
K01 = ((Z01 - Zl)/(3.Zl)),
K02 = ((Z02- Zl)/(3.Zl)).
5-33
MS/M 1.6882-C
EPAC 3100/3500
Example of impedance calculation:
Z3
Z2
Z1
EA
(L1) 7 km
(L2) 3 km
EB
ZSB
ZSA
Line Zdl
Z0l
Cable Zdc
Z0c
length to be entered: 10 km
total positive sequence impedance to be protected
Zd = Zdl + Zdc
for Z1 = 0.8 Zd and for Z2 = 1.2 Zd
Z01 = (Z0l/L1).(L1+L2)
Z02 = Z0l+Z0c
If you only have the HV impedance values (calculated before the CTs), the impedances in LV
Ohms are calculated as follows:
ZBT = (Current transformer ratio/voltage transformer ratio).Zcalculated
Accessing the Line Parameters
From the WinEPAC software
1.
Select the Line button in the Settings - Main screen. The setting screen for line characteristics is displayed.
Figure 5.4g: Setting Screen for the Line Characteristics Function
5-34
EPAC 3100/3500
MS/M 1.6882-C
Setting conditions
-
The unit used in the Line Length setting depends on the unit selected on the Preferences screen
displayed via System Data.
From the EPAC display
1.
Select the LIGN option.
2.
The first three available parameters are displayed on the second line, just before the
—> sign indicating that other parameters are available.
The display software only accepts impedance values
expressed in cartesian co-ordinates.
From the Protection Access Software & Toolkit software
1.
Select the LINE CHARACTERISTICS column.
2.
The line parameters are displayed.
5-35
MS/M 1.6882-C
EPAC 3100/3500
CHANGING THE TELEACTION PARAMETERS
Description
These parameters are used to define the type of teleaction between the EPAC and the distance
protection at the other end of the line:
-
the possible type of tripping,
-
the teleprotection mode,
-
the teleaction channels to be used,
-
the blocking time delay if a blocking mode is used,
-
the teleaction mode,
-
the possible use of busbar isolation mode,
-
the possible use of zone reach control mode if no teleprotection is used.
Some Advice on How to Set the Parameters
How can the teleaction mode be chosen?
The acceleration or permissive overreach modes are generally associated with long lines. The
blocking mode is generally associated with short lines.
What type of transmission is used in acceleration or permissive overreach modes?
If the teleprotection mode corresponds to an acceleration or permissive overreach:
-
if the line is likely to be disturbed by a fault, you can transmit the teleaction messages either
in unlocking mode or in carrier loss mode. The carrier loss mode is more economical because
it only requires one channel,
-
the transmission is generally associated with a forward zone (zone 1 or zone 1 - zone 2).
What type of transmission is used in blocking mode?
If the teleprotection mode corresponds to a blocking operation, the transmission is generally
associated with the reverse zone (zone 5).
What if no teleaction is provided?
If no teleaction mode is associated with the protection, the zone reach control or busbar isolation
mode can be programmed. In zone reach control mode and without considering the operation
of the recloser, the zone 1 or 2 faults are associated with a step 1 time delay (which often
corresponds to instantaneous tripping).
5-36
EPAC 3100/3500
MS/M 1.6882-C
Accessing the teleaction parameters
From the WinEPAC software
1.
Click on the Teleprotection button of the Settings - Main screen.
2.
The setting screen for the Distance protection is displayed.
Figure 5.4h: Setting Screen for the Distance protection
Setting conditions
-
The "Emission type" group can only be set if a distance protection scheme is selected.
-
The "HF presence/unblocking" group can only be set if the distance protection selected is
acceleration or permissive.
-
The transmission time delay can only be set if the distance protection scheme selected is
locking.
-
The Zone Reach Control and Busbar Isolation options are mutually exclusive.
-
The Zone Reach Control or Busbar Isolation option can only be selected if there is no distance
protection setting for the EPAC.
5-37
MS/M 1.6882-C
EPAC 3100/3500
From the EPAC display
1.
Select the TELE option.
2.
The first three parameters available are displayed on the second line, just before the
—> sign indicating that other parameters are available.
From the Protection Access Software & Toolkit software
1.
Select the LOGIC SCHEME column.
2.
The teleaction parameters are displayed.
5-38
EPAC 3100/3500
MS/M 1.6882-C
CHANGING THE ZONE SETTING PARAMETERS
Description
These parameters define the characteristics of the convergence zones and the time delays of the
associated steps:
-
the impedances for the 5 zones,
-
the limit resistance values for parallelogram-shaped characteristics,
-
the zone 3 directional,
-
the time delays associated with the 5 zones,
-
the time delays, thresholds and directionals associated with overcurrent start-up.
Some Advice on How to Set the Parameters
For which zones can parameters be set and under what conditions?
Parameters can always be set for zones 1, 2, 3 and 4 and for:
-
Extended zone 1, if zone reach control mode is active,
-
Zone 5, if busbar isolation mode is inhibited.
Selecting the direction associated with zone 3
The position of zone 3 directional can be set to reverse to increase selectivity for reverse
protection.
How can the impedances for zones 1 and 2 be chosen?
The impedance value for zones 1 and 2 must be consistent with the teleprotection mode:
-
if the EPAC operates in overreach range mode, the impedance of zone 1 must be more than
the line impedance between the two protections,
-
if the EPAC operates in underreach range mode:
. the impedance of zone 1 must be less than the line impedance between the two
protections,
. the impedance of zone 2 must be more than the line impedance between the two
protections.
5-39
MS/M 1.6882-C
EPAC 3100/3500
Zone 2
Zone 2
C
D
C
Zone 1
Zone 1
Zone 2
Zone 1
D
Zone 1
Zone 2
Underreach
Overreach
Figure 5.4i: Possible Range of the EPAC
How can the step time delays be configured?
Time delays must increase from one step to the other. Step 1 generally trips instantaneously and
is therefore associated with a time delay value of zero.
What are the limit resistance values for zone 1?
One zone 1 limit resistance value can be defined for single-phase faults and another for multiphase faults although these two limit resistance values are generally equal.
Setting the overcurrent protection
The overcurrent protection thresholds and time delays must comply with the following conditions:
-
the I>> threshold must be higher than the I> threshold,
-
the T>> time delay must be shorter than the T> time delay.
Associating a directional with a threshold is the equivalent of defining the threshold as a backup
protection in the selected direction. If no directional is defined, the backup protection applies
for reverse and forward protection.
Accessing the zone setting parameters
From the WinEPAC software
Setting zone 1 to zone 5 impedances and resistances and zone 3 directional
1.
Click on the Zone Setting button of the Settings - Main screen.
2.
The zone setting screen is displayed.
5-40
EPAC 3100/3500
MS/M 1.6882-C
Figure 5.4j: Zone Setting Screen
Setting conditions
Extended zone 1 impendance can only be set if the "Zone reach control" option has been
selected in the teleprotection screen.
Setting the time delays and threshold characteristics associated with the overcurrent start-up
1.
Click on the Zone Setting button of the Settings - Main screen.
2.
The zone setting screen is displayed.
3.
Click on the Time Delays... tab. The setting screen for time delays and thresholds is
displayed.
5-41
MS/M 1.6882-C
EPAC 3100/3500
Figure 5.4k: Setting Screen for Time Delays and Thresholds
From the EPAC display
1.
Select the SURV option.
2.
The first three available parameters are displayed on the second line, just before the
—> sign indicating that other parameters are available.
From the Protection Access Software & Toolkit software
1.
Select the ZONE SETTINGS column.
2.
The zone setting parameters are displayed.
5-42
EPAC 3100/3500
MS/M 1.6882-C
CHANGING THE TELEACTION PARAMETERS FOR A TEE LINE
Description
The EPAC can also handle situations where a short tee line is located near one of the ends of
a line to be protected. It is thus possible to have independent teleaction parameters with the
protection located on the branch line.
Some Advice on How to Set the Parameters
In general:
-
both ends of the main line are connected to the network and, as a result, to sources,
-
users are supplied through tee lines.
How many teleaction modes are there for a tee line?
For this type of tee line, a first teleaction mode must be provided to protect the main line as well
as a second teleaction mode between the tee line protection and the main line protection(s).
What is the most appropriate teleaction mode for the tee line and the main line?
As distance measurements are not very disturbed on the main line, protections on that line can
operate in step acceleration.
As branch line measurements lack precision, the tee line protection must operate in the overreach
range and blocking mode with the main line protection.
In the example of figure 5.4l, the protections must be configured as follows:
-
Protections A-B
permissive underreach
-
Protections A-C
blocking overreach mode
-
Protections B-C
blocking overreach mode
A
B
ZONE 1B
ZONE 1A
ZONE 1A
ZONE 1B
C
Figure 5.4l: Tee Line Example
5-43
MS/M 1.6882-C
EPAC 3100/3500
Accessing the Teleaction Parameters for the Tee Line
From the WinEPAC software
1.
Click on the Tee Line button of the Settings - Main screen.
2.
The setting screen for teleprotection for tee line function is displayed.
Figure 5.4m: Setting Screen for the Teleprotection for Tee Line Function
Setting conditions
-
The "Emission type" group can only be set if a distance protection scheme is selected.
-
The "HF presence/unblocking" group can only be set if the distance protection scheme
selected is acceleration or permissive.
-
The transmission time delay can only be set if the distance protection scheme selected is
locking.
5-44
EPAC 3100/3500
MS/M 1.6882-C
From the EPAC display
1.
Select the PIQU option.
2.
The first three parameters available are displayed on the second line, just before the
—> sign indicating that other parameters are available.
From the Protection Access Software & Toolkit software
1.
Select the TEE LINE LOGIC SCHEME column.
2.
The tee line teleaction parameters are displayed.
5-45
MS/M 1.6882-C
EPAC 3100/3500
CHANGING THE WEAK INFEED PARAMETERS
Description
The Weak Infeed mode is used to continue operation in remote protection mode when one of
the ends is close to a source that is too weak.
The weak infeed parameters are used to define the following:
-
the detection time delay and threshold of a weak infeed,
-
the measures to take if a source is considered to be too weak.
Some Advice on How to Set the Parameters
What happens if the weak infeed mode is selected?
If the weak infeed mode is selected and if a teleaction message is received when the protection
device is not operating, the following occurs:
-
the teleaction message received is re-transmitted (Echo mode),
-
the associated circuit breaker is not tripped or is tripped in single-phase or three-phase.
How can tripping be avoided when the corresponding CB of the protection is open?
If the weak infeed mode is associated with a tripping operation, a minimum current threshold
is used to determine whether one or several phases are open and therefore to prevent tripping
if the circuit breaker is open.
Accessing the weak infeed parameters
From the WinEPAC software
1.
Click on the Weak Infeed button of the Settings - Main screen.
2.
The setting screen for weak infeed mode is displayed.
5-46
EPAC 3100/3500
MS/M 1.6882-C
Figure 5.4n: Setting Screen for Weak Infeed Mode
Setting conditions
-
"Weak Infeed" mode can be activated under the following conditions:
. permissive or acceleration mode selected in the zone setting parameters,
. no tee line selected in the tee line parameters.
-
The "Confirmation by under voltage" group can be activated if one- or three-pole tripping
is selected.
-
If tripping mode is set as 1-pole, confirmation by under-voltage is automatically selected.
From the EPAC display
1. Select the WEAK option.
2. The first three parameters available are displayed on the second line, just before the —> sign
indicating that other parameters are available.
From the Protection Access Software & Toolkit software
These parameters can be accessed from the data column:
1.
Select the WEAK INFEED SETTING column.
2.
The weak infeed parameters are displayed.
5-47
MS/M 1.6882-C
EPAC 3100/3500
CHANGING THE MISCELLANEOUS PARAMETERS
Description
"Miscellaneous parameters" covers settings for several EPAC functions:
-
auto-recloser blocking by distance or overcurrent protection, with or without time delay,
-
reclose threshold on fault,
-
threshold for holding the trip when a current is present,
-
time delay for reversal of the directional.
Some Advice on How to Set the Parameters
Holding tripping when a current is present (SEALIN)
This holding function is used to check the tripping drop-offs by the absence of a current on the
line. The tripping command sent by the protection device is maintained as long as the fault
current is greater than the programmed threshold. In any case, the instruction for tripping will
never be maintained for more than 10 sec.
Recloser blocking
The recloser blocking is taken into account:
-
after a step 2, 3, 4 or 5 time delay,
-
after an overcurrent protection time delay (T>> ou T>).
The selected time delay should make it possible not to lock the auto-recloser without reason.
Accessing the miscellaneous parameters
From the WinEPAC software
1.
Click on the Others button of the Settings - Main screen.
2.
The setting screen for the miscellaneous parameters is displayed.
5-48
EPAC 3100/3500
MS/M 1.6882-C
Figure 5.4o: Miscellaneous Parameters Screen
From the EPAC display
1.
Select DIVE.
2.
The first three parameters available are displayed on the second line, just before the
—> sign indicating that other parameters are available.
From the Protection Access Software & Toolkit software
1.
Select the MISCELLANEOUS PARAMETERS column.
2.
The miscellaneous parameters are displayed.
5-49
MS/M 1.6882-C
EPAC 3100/3500
CHANGING THE FUSE FAILURE PARAMETERS
Description
The fuse failure parameters cover:
-
the zero-sequence and negative-sequence threshold values and the associated time delays,
-
activation of the Ifus>, Ifus>> and Ifr> thresholds,
-
the value of each of these thresholds,
-
the time delay associated with each of these thresholds,
-
auto-recloser blocking if one of the predefined thresholds is exceeded.
Some Advice on How to Set the Parameters
How can the fuse failure parameters be configured?
The EPAC protection function is locked as soon as it receives a fuse-failure signal. This signal
can come from one of the following sources:
-
external, from the M.C.B., (mini-circuit breaker),
-
internal, defined using the zero-sequence and negative-sequence current values and the zerosequence voltage value as illustrated by the following equation:
Fuse failure = (FFext + Vr). (I1. I0. Imax) where Imax = 2.5 In
The following parameters can be set:
-
the time between detection of the fuse blow and transmission of the alarm,
-
the zero-sequence and negative-sequence current thresholds used for internally detecting a
fuse failure.
The value of the fuse failure thresholds determines how
sensitive the protection device is to faults.
Setting the current thresholds
The thresholds and time delays associated with a confirmed fuse failure must comply with the
following conditions:
-
the Ifus>> threshold must be higher than the Ifus> threshold,
-
the Tfus>> time delay must be shorter than the Tfus> time delay.
5-50
EPAC 3100/3500
MS/M 1.6882-C
Accessing the fuse failure parameters
From the WinEPAC software
1.
Click on the Others button of the Settings - Main screen. The setting screen for the
miscellaneous parameters is displayed.
2.
Click on the Fuse Failure tab. The setting screen for the fuse failure functions is displayed.
Figure 5.4p: Setting Screen for the Fuse Failure Parameters
From the EPAC display
1.
Select FFUS.
2.
The first three parameters available are on the second line, just before the —> sign
indicating that other parameters are available.
From the Protection Access Software & Toolkit software
1.
Select the FUSE FAILURE SETTING column.
2.
The fuse failure parameters are displayed.
5-51
MS/M 1.6882-C
5.4.3.
EPAC 3100/3500
Configuring the software functions
These functions are present on some EPAC models only. The following functions are concerned:
-
the power swing function,
-
the high resistance earth fault function,
-
the auto-recloser function,
-
the synchro-check function,
-
the isolated or compensated network function and the zero sequence power function,
-
the maximum voltage, minimum voltage and overload protection function.
The setting screens for these functions can be accessed using the buttons of the setting screen
for the software functions.
Accessing the setting screen for the software functions
From the WinEPAC software
1.
Select the Settings - Parameters screen.
2.
Click on the Options button. The Settings - Options screen is displayed.
Figure 5.4q: Settings - Options Screen
5-52
EPAC 3100/3500
MS/M 1.6882-C
From the EPAC display
1.
Activate the configuration to be modified.
2.
Select the CONF, PARA and PROT options one after the other from the main menu. The
main settings menu is displayed.
From the Protection Access Software & Toolkit software
This software does not have a data column grouping
together all the optional protection functions. The parameters for each optional function are contained in columns
grouping together a particular type of data. They are
viewed if the options are available.
5-53
MS/M 1.6882-C
EPAC 3100/3500
CHANGING THE POWER SWING PARAMETERS
Description
These parameters are used to define the following:
-
the power swing detection time delay and threshold,
-
the functions to be locked when power swing is detected,
-
the power swing unlocking thresholds.
Some Advice on How to Set the Parameters
How can the width of the power swing band be calculated?
X
Z4
R
- Rlim
Rlim
Z5
R
Power swing band
Figure 5.4r: Characteristics of the Power Swing Band
The power swing band parameters are calculated in the following way:
∆ƒ
power swing frequency (ƒA-ƒB)
Rcha
Rlim
∆R
Z
Load Resistance
Characteristic Limit Resistance
the width of the power swing detection band
network impedance corresponding to the sum of the reverse (Z5) and forward
(Z4) impedances
The width of the power swing band is calculated using the following equation:
Rlim2 + Z2
∆R = 1.3 tan ( π.∆ƒ.∆t).
Z
Assuming that the load corresponds to 60˚ angles between sources and if the characteristic limit
is set so that Rlim = Rcha/2, the following is obtained:
∆R = 0.032 . ∆ƒ. Rcha
5-54
EPAC 3100/3500
MS/M 1.6882-C
To make sure that a power swing frequency of 5 Hz is detected, the following is obtained:
∆R = 0.16 x Rcha
How can the maximum time for keeping the point inside the characteristic be set?
Time selectivity can be defined for the maximum time the impedance point stays in the
characteristic as a result of the power swing phenomenon only.
If the limit resistance width corresponds to half the load for sources that are out of phase by 60˚,
the impedance point remains in the characteristic for half the duration of the cycle.
For example, the point will remain in the characteristic for approximately 5 seconds if there is
a power swing of 0.1 Hz.
What zones are locked when power swing occurs?
If no de-loopback protection is available in case power swing occurs, distance protection can
be used instead. If the tripping operations are locked if power swing occurs - not including those
in zone 1 -, the protection devices with an electric zero in zone 1 formulate the line opening
commands.
What happens if a fault occurs during a power swing?
Dissymmetric effects such as the presence of a residual current or a negative sequence current
(dissymmetric earth faults or two phase faults) can illustrate an isolation fault when power swing
occurs. The fact that the power swing current does not generally exceed twice the maximum load
current can also be taken into account.
If a fault is detected during power swing, and as the distance measurement is not reliable, the
remote protection directional function should be preferred, and zone 1 independence should
be locked. In this case, the EPAC protection function operates in directional comparison mode.
The tripping mode group allows to select 2 specific tripping modes in case of power swing:
1 pole: 1-pole tripping is carried out if a fault is detected during power swing. In this case, the
network stability is favoured.
3 pole: 3-pole tripping is carried out for all faults.
Accessing the power swing parameters
From the WinEPAC software
1.
Click on the Power Swing button of the Settings - Options screen.
2.
The setting screen for the power swing function is displayed.
5-55
MS/M 1.6882-C
EPAC 3100/3500
Figure 5.4s: Setting Screen for the Power Swing Function
Setting conditions
-
The first threshold ratio for unblocking the protection can be set if unblocking on current Ir
threshold is activated.
-
The second threshold ratio for unblocking can be set if unblocking on current I2 threshold is
activated.
-
The Imax unblocking threshold can be set if unblocking on Imax is activated.
From the EPAC display
1.
Select the POMP option.
2.
The first three parameters available are displayed on the second line, just before the
—> sign indicating that other parameters are available.
From the Protection Access Software & Toolkit software
1.
Select the POWER SWING SETTING column.
2.
The power swing parameters are displayed.
5-56
EPAC 3100/3500
MS/M 1.6882-C
CHANGING THE HIGH RESISTANCE EARTH FAULT PARAMETERS
Description
The high resistance earth fault parameters are used to configure the following:
-
the directional comparison protection,
-
the auxiliary protection, with inverse time zero sequence current or zero sequence power.
Some Advice on How to Set the Parameters
What is the role of the directional comparison function?
The Directional Comparison provides backup protection in case a high resistance earth fault
occurs that cannot be detected by the remote protection equipment.
What teleaction channels should be used?
A teleaction channel can be defined to co-ordinate the action of this protection function and that
of a remote protection device. This channel may or may not be independent of the remote
protection channel and allows operation as per the blocking or permissive overreach teleaction
modes.
Accessing the parameters of the high resistance earth faults
From the WinEPAC software
Setting the directional comparison protection
1.
Click on the DEF button of the Settings - Options screen.
2.
The setting screen for high resistance earth fault protection is displayed.
5-57
MS/M 1.6882-C
EPAC 3100/3500
Figure 5.4t: Setting Screen for High Resistance Earth Faults
Setting conditions
If directional comparison is activated, you can set:
-
the tripping type,
-
the tripping scheme,
-
the tee line tripping scheme,
-
the voltage thresholds and transmission time delays.
Setting the backup protection
1.
Click on the DEF button of the Settings - Options screen.
2.
The setting screen for high resistance earth fault protection is displayed.
3.
Click on the Backup Protection tab.
4.
The setting screen for backup protection is displayed.
5-58
EPAC 3100/3500
MS/M 1.6882-C
Figure 5.4u: Setting Screen for the Backup Protection Function
If backup current protection is activated, you can set:
-
time curve standards and types,
-
the Ir threshold,
-
multiplier factor I,
-
backup protection auto-recloser blocking.
If backup power protection is activated, you can set:
-
the Ir threshold,
-
multiplier factor P,
-
backup protection auto-recloser blocking.
From the EPAC display
1.a
Select DEFD to change the parameters of the directional comparison protection.
1.b
Select DEFI to change the parameters of the backup protection.
2.
The first three parameters available are displayed on the second line, just before the
—> sign indicating that other parameters are available.
From the Protection Access Software & Toolkit software
1.
Select the DEF SETTING column.
2.
The parameters for high resistance earth faults are displayed.
5-59
MS/M 1.6882-C
EPAC 3100/3500
CHANGING THE PARAMETERS OF THE AUTOMATIC RECLOSER CONTROL
Description
If the recloser function is integrated into the EPAC, the following can be defined:
-
the acceptance of the recloser option,
-
the cycle and reclaim time delays,
-
the duration of the closing order,
-
the shots used (single-phase/three-phase, single-phase/three-phase/three-phase, threephase/three-phase/three-phase/three-phase, etc.).
The single-phase and two-phase cycle counters can also be reset.
Some Advice on How to Set the Parameters
What high-speed shot should you choose if there is a Tee line?
If the main line has a tee line and if the transformer of this tee line does not have a circuit breaker
in reverse position, the high-speed cycle should always be three-phase. This is because a singlephase fault current tends to spread via the transformer on the phases unaffected by faults.
When should slow shot be chosen?
If no additional modules for the voltage check are available slow shots should only generally
be chosen for networks that do not have stability problems or for radial networks.
How can the recloser time delays be configured?
Trip
Tcyc
Tencl
Tbloc
Tcyc = Cycle time delay
Tbloc = Reclaim time
Tencl = Reclosing time
Figure 5.4v: Time-delays during one reclosing cycle
5-60
EPAC 3100/3500
MS/M 1.6882-C
The time delay of the high-speed single-phase cycle must be greater than the minimum time it
takes to deionize the arc on the line to be protected. The deionization time depends on the length
of the line due to the charging/discharging phenomena of the conductor capacitances used.
The time delay of the high-speed three-phase cycle must be short enough to assure line stability.
The reclaim time delay must allow the recloser to correctly process the transient faults.
The slow reclaim time delay associated with the backup protection must be at least as long as
the standard reclaim time delay.
Accessing the parameters of the automatic recloser control device
From the WinEPAC software
1.
Select the Auto-Recloser button of the Settings - Options screen.
2.
The auto-recloser setting screen is displayed.
Figure 5.4w: Setting Screen for the Auto-Recloser Function
5-61
MS/M 1.6882-C
EPAC 3100/3500
From the EPAC display
1.
Select the ARC option.
2.
The first three parameters available are displayed on the second line, just before the
—> sign indicating that other parameters are available.
From the Protection Access Software & Toolkit software
1.
Select the AUTO RECLOSER SETTING column.
2.
The auto-recloser parameters are displayed.
5-62
EPAC 3100/3500
MS/M 1.6882-C
CHANGING THE SYNCHROCHECK PARAMETERS
Description
If the synchrocheck function is integrated into the EPAC, you can configure the type of
synchronisation to be checked between the line and bar voltages for one slow cycle reclosing
operation.
Some Advice on How to Set the Parameters
How can the voltage check criterion be chosen?
This criterion is determined by the sources present that are upstream and downstream of the line
where the EPAC is installed.
Criterion
Check Performed
Live busbar
Dead line
Busbar voltage > threshold
Line voltage < threshold
Dead busbar
Live line
Busbar voltage < threshold
Line voltage > threshold
Live busbar
Live line
Busbar voltage > threshold
Line voltage > threshold
Vector difference between bar and line voltages < threshold
Phase difference between bar and line voltages < threshold
Frequency difference between bar and line voltages < threshold
Live busbar/dead line,
dead busbar/live line or
live busbar/live line
The criteria for live busbar/dead line, dead busbar/
live line or live busbar/live line mode must be
checked.
Why should the busbar voltage measurement phase be given?
This information is used to correctly calculate the line-bar phase-shift. It concerns the reference
phase for the line voltage. The reference line voltage should be compared with the equivalent
voltage from the busbar transformer.
5-63
MS/M 1.6882-C
EPAC 3100/3500
Accessing the synchro-check parameters
From the WinEPAC software
1.
Click on the Synchrocheck button of the Settings - Options screen.
2.
The setting screen for the synchro-check function is displayed.
Figure 5.4x: Setting Screen for the Synchro-Check Function
Setting conditions
-
The voltage presence/absence thresholds can be set if any type of synchro-check other than
"none" is activated.
-
The difference thresholds and the Live busbar/live line delay can be set if the selected check
synchronising scheme is either "Live busbar and live line" or "All".
5-64
EPAC 3100/3500
MS/M 1.6882-C
From the EPAC display
1.
Select the SYNC option.
2.
The first three parameters available are displayed on the second line, just before the
—> sign indicating that other parameters are available.
From the Protection Access Software & Toolkit software
1.
Select the SYNCHRO-CHECK SETTING column.
2.
The synchro-check parameters are displayed.
5-65
MS/M 1.6882-C
EPAC 3100/3500
CHANGING THE PARAMETERS OF ISOLATED OR COMPENSATED NETWORK
(RNI) PROTECTION
Description
If the RNI option is integrated into the EPAC, the following can be defined:
-
the acceptance of the RNI option,
-
the priority criterion to be used by the phase selection function if a double fault is detected,
-
the value of the tripping time delay associated with a simple phase-earth fault.
Some Advice on How to Set the Parameters
How can the loop selection criterion be chosen?
This criterion defines the priority between phases when a double phase-earth fault is detected.
Normally, this criterion should be identical for all the protection devices on the network that have
the same neutral point.
Busbar
Fault 2
Fault 1
Line 2
EPAC 3000
Line1
Figure 5.4y: Example of a Double Fault
Loop Selection Criterion
Priority Phases
A(C) acyclic
A before C before B
C(A) acyclic
C before A before B
A(B) acyclic
A before B before C
B(A) acyclic
B before A before C
B(C) acyclic
B before C before A
A(C) cyclic
A before C before B before A
C(A) cyclic
C before A before B before C
5-66
EPAC 3100/3500
MS/M 1.6882-C
What does the tripping time delay correspond to?
This time delay is used to set the tripping parameters associated with the persistent single phase
to earth faults.
Accessing the Isolated or Compensated Network parameters
From the WinEPAC software
1.
Click on the Non-earthed Net. button of the Settings - Options screen.
2.
The setting screen for isolated network fault protection is displayed.
Figure 5.4z: Setting Screen for the Isolated or Compensated Network Function
From the EPAC display
1.
Select the PET option.
2.
The first three parameters available (which are common to both the RNI and the ZSP
options) are displayed on the second line, just before the —> sign indicating that other
parameters are available.
From the Protection Access Software & Toolkit software
1.
Select the ISOLATED OR COMPENSATED NETWORK column.
2.
The RNI and ZSP parameters are displayed.
5-67
MS/M 1.6882-C
EPAC 3100/3500
CHANGING THE PARAMETERS OF SENSITIVE DIRECTIONAL EARTH FAULT
PROTECTION
Description
If the function is integrated into the EPAC, the following can be set:
-
the primary CT core angle,
-
the residual current threshold, the directional detection characteristic angle and the power
threshold coefficient K,
-
the CT core ratio KIs,
-
the auto-start (intermittent) faults period.
Some Advice on How to Set the Parameters
How to calculate the primary CT core angle
This phase angle corresponds to the PHI curve in the following diagram. It is regarded as
constant if the residual current is above the I2 threshold and as linear between thresholds
I1 and I2.
φ
Phase angle =
φ1
(φ1 - φ2). I (φ2.I1 - φ1.I2)
+
(I1 - I2)
(I1 - I2)
Phase angle = φ2
φ2
I1
I2
I
Figure 5.4aa: Primary CT phase angle curve
The zero sequence directional thresholds
The zero sequence directional is calculated when the RNI function detects a single phase fault.
The calculation is only carried out if the current, voltage and residual power levels overshoot
certain thresholds. The residual active power threshold is calculated using the current and
voltage thresholds and the K coefficient:
Residual active power threshold = K.(Current threshold).(Voltage threshold)
5-68
EPAC 3100/3500
MS/M 1.6882-C
Accessing the Zero Sequence Power parameters
From the WinEPAC software
1.
Click on the Non-Earthed Network button of the Settings - Options screen. The main
setting screen for the RNI function is displayed.
2.
Click on the ZSP tab. The setting screen for the zero sequence power functions is displayed.
Figure 5.4ab: Setting screen for the zero sequence directional
Setting conditions
-
The zero sequence directional can only be activated and set if the Zero Sequence Power
option is checked on the system functions Software Options screen for.
-
The I1 current threshold must be lower than the I2 threshold.
-
The I1 phase angle must be higher than the I phase angle.
From the EPAC display
1.
Select the PET option.
2.
The first three parameters available (which are common to both the RNI and the ZSP
options) are displayed on the second line, just before the sign —> indicating that other
parameters are available.
5-69
MS/M 1.6882-C
From the Protection Access Software & Toolkit software
1.
Select the ISOLATED OR COMPENSATED NETWORK column.
2.
The RNI and ZSP parameters are displayed.
EPAC 3100/3500
5-70
EPAC 3100/3500
MS/M 1.6882-C
CHANGING THE MAXI, MAXU AND MINU PROTECTION PARAMETERS
Description
The MaxI, MaxU and MinU protection parameters are used to define:
-
the backup protection to be used,
-
the threshold value for each protection device selected.
Some Advice on How to Set the Parameters
What time delays should be associated with the protection against overloads?
The following can be associated with this protection:
-
settable time delays corresponding to settable thresholds,
-
time delays corresponding to ANSI (also known as US) or IEC inverse time curves.
Accessing the MaxI, MaxU and MinU protection parameters:
From the WinEPAC software
Setting the MaxU and MinU protections
1.
Click on the Under Overload button of the Settings - Options screen.
2.
The setting screen for the MaxU and MinU protections is displayed.
5-71
MS/M 1.6882-C
EPAC 3100/3500
Figure 5.4ac: Setting Screen for the MaxU and MinU Protections
Setting conditions
If the relays are activated by MaxU, the following can be set:
-
the MaxU threshold,
-
the MaxU time delay,
-
the trip on MaxU.
If the relays are activated by MinU, the following can be set:
-
the MinU threshold,
-
the MinU time delay.
Setting the overload protection
1.
Click on the I>> tab of the setting screen for the MaxU and MinU protections.
2.
The setting screen for overload protection is displayed.
5-72
EPAC 3100/3500
MS/M 1.6882-C
Figure 5.4ad: Setting Screen for the Overload Protection
If "Fixed thresholds" is selected for overload protection, three fixed thresholds and their
associated time delays can be set.
If inverse time curves are selected, the following can be set:
-
the time curve standard,
-
the time curve type,
-
the line current threshold,
-
the multiplier factor.
From the EPAC display
1.
To set the parameters of the MaxI protection device, select the RELI option.
To set the parameters of the MaxU and MinU protection devices, select the RELU option.
2.
The first three parameters available are displayed on the second line, just before the
—> sign indicating that other parameters are available.
From the Protection Access Software & Toolkit software
1.
Select the V>>, V<<, I>> column.
2.
The parameters for MaxI, MaxU and MinU protection are displayed. Changing the
Disturbance Recording Parameters.
5-73
MS/M 1.6882-C
EPAC 3100/3500
CHANGING THE DISTURBANCE RECORDING PARAMETERS
Description
If the disturbance recording function is installed in the EPAC, the following can be defined:
-
the acceptance of the disturbance recording option,
-
the value of the pre-time and post-time,
-
whether or not the disturbance recording function starts up on analogue thresholds.
Some Advice on How to Set the Parameters
How can the event recording time be configured?
Up to 5 seconds for one record can be stored and this should be taken into account when
selecting the pre-time and post-time values.
How can the disturbance recording function be synchronised on one UR 2000?
The date stamping of disturbance recording events can be synchronised by a UR 2000 type
restitution unit. This unit must be connected to the AC board of the EPAC by modem or by current
loop.
How can the parameters of the disturbance recording start-up be set?
The disturbance recording function may or may not be configured for start-up when the
thresholds of the analogue values are exceeded. This lets the disturbance recording data be
recorded when another equipment item processes a fault (for example, a redundant protection
device).
The parameters for disturbance recording start-up when
the logic channels change status are defined when the
inputs/outputs are assigned (see sub-section Assigning the
Digital Inputs/Outputs).
5-74
EPAC 3100/3500
MS/M 1.6882-C
Accessing the disturbance recording parameters
From the WinEPAC software
1.
Click on the Disturbance button of the EPAC - Configuration screen.
2.
The setting screen for the disturbance recording function is displayed.
Figure 5.4ae: Setting Screen for the Disturbance Recording Function
Setting conditions
The current, voltage and frequency thresholds can only be set if the Analogue thresholds box
is checked.
From the EPAC display
The disturbance recording parameters cannot be changed
from the display.
5-75
MS/M 1.6882-C
EPAC 3100/3500
From the Protection Access Software & Toolkit software
1.
Select the ANALOGUE SETTING FOR DISTURBANCE column.
2.
The disturbance recording parameters for the analogue channels are displayed.
Setting the parameters for disturbance recording on digital
signals is described in the sub-section Assigning the Digital
Inputs/Outputs.
5-76
EPAC 3100/3500
MS/M 1.6882-C
ASSIGNING THE DIGITAL INPUTS/OUTPUTS
Description
The digital inputs/outputs specific to each function of the EPAC can be assigned to the physical
contacts of the IO-1 input/output board and, to the physical contacts of a second IO-1 or IO2 board, if applicable. Allocating the inputs/outputs in this manner allows the signalling
interface between the EPAC and the outside to be monitored.
Each contact of the input/output boards is associated with a number (refer to Appendix "Input/
Output Connections"). The output contacts are numbered from 01 to 16 and the input contacts
are numbered from 01 to 08.
Several digital signals can be grouped together on the
same contact. In this case the value of the contact corresponds to a logic OR between the signals that have been
assigned to it. For instance, Dec A, Dec B and Dec C can
be grouped together on the same contact but Dec A and
Sel_Phase B cannot.
The tripping and closing signals that control the circuit
breaker are pre-assigned to the contacts of the IO-1 and
IO–2 boards. The same applies to equipment fault contacts.
If the fault recording option is integrated into the EPAC, each digital input/output can be
configured in the following way:
-
so that its actions are recorded into the disturbance report,
-
to start up the fault recording function on low-to-high or high-to-low transition. A signal that
is configured to start up the fault recording function is always recorded by the latter.
Assigning the Inputs/Outputs
From the WinEPAC software
The assignable inputs and outputs are divided into several screen pages called grids. There are
2 assignment grids for the inputs and 4 assignment grids for the outputs. They can be accessed
via the Inputs and Outputs buttons of the main setting screen.
Accessing the input/output assignment grids
1.
Click on the Inputs or Outputs button of the EPAC - Configuration screen.
5-77
MS/M 1.6882-C
EPAC 3100/3500
Re-assigning an output
2.
There are five entry fields to the right of the label of the output to be assigned, as shown
in the following figure, (if the corresponding options are present).
Figure 5.4af: Assignment Fields of a Digital Output on the PC
3.
The first four fields are used to assign the digital signals to the contacts of the IO-1 or IO3 board and of a supplementary IO-1 or IO-3 or IO-2 board (if the latter is installed on
the EPAC ). The last field is used to assign the signal to disturbance recording.
!
The IO-3 board has been developed for some very specific applications. It is not
recognised as such by the EPAC software which will assume it is an IO-1 board.
Therefore, when an IO-3 board is used, whether as standard and/or additional
board, contacts 14, 15 and 16 are tripping contacts. They must not be assigned
any outputs as these would not be taken into account and there would not be any
warning from the software
Re-assigning an input
4.
There are between one and three entry fields to the right of the label of the input to be
assigned.
5.
The first field is always present and is used to assign the digital signals to the IO-1 or IO3 board.
The second field is only present if the supplementary input/output board is installed on
the EPAC. It is used to assign the digital signals to this second board.
The third field is only present if the disturbance recording option is installed on the
EPAC. It is used to activate start-up of disturbance recording on status change, as appropriate.
5-78
EPAC 3100/3500
MS/M 1.6882-C
From the EPAC display
The assignable inputs and outputs are divided into two or four groups identified by the options
OUT1, OUT2, INP1 and INP2.
Option
Groups Together
OUT1
the assignable outputs on the IO-1 or IO-3 board.
OUT2
the assignable outputs on the additional IO-1 or IO-3 or IO2 board.
INP1
the assignable inputs on the IO-1 or IO-3 board.
INP2
the assignable inputs on the additional IO-1 or IO-3 board.
Accessing the input/output assignment options
1.
Press the key several times until the CONF option appears on the second line.
2.
Select PARA and I/O in that order. The options of the input/output assignment groups
are displayed on the second line.
Re-assigning an output
1.
Select the OUT1 or OUT2 option. The labels of the first three assignable output signals
are displayed on the second line.
2.
Select the signal to be configured. The current signal allocation is displayed on the
second line. Two data input fields are located to the right of the signal label.
. / PARA / E/S / OUT1
DecA 00/00 00/00
SET
Help
Figure 5.4ag: Assignment Fields of a Logic Output on the Display
3.
Both fields can be used to assign the signal to two contacts on a board.
Re-assigning an input
1.
Select the INP1 or INP2 option. The labels of the first three assignable input signals are
displayed on the second line.
2.
Select the signal to be configured. The present signal assignment is displayed on the
second line. A data input field is located to the right of the signal label.
5-79
MS/M 1.6882-C
EPAC 3100/3500
From the Protection Access Software & Toolkit software
Re-assigning an output
1.
To assign outputs to the main IO-1 or IO-3 board, select the OUTPUT CONFIGURATION
column.
2.
The list of outputs that can be assigned to the main IO-1 or IO-3 board is displayed.
Each output label is preceded by DO1 and can be assigned to a contact of the IO-1 or
IO-3 board.
3.
To assign outputs to the supplementary board, select the OUTPUT CONFIGURATION
(2ND BOARD) column.
4.
The list of outputs that can be assigned to the supplementary board is displayed. Each
output label is preceded by DO2 and can be assigned to a contact of the supplementary
board.
5.
To assign the signals to disturbance recording, select the OUTPUT SETTING FOR DISTURBANCE column. The possible parameters are:
-
No: does not start up disturbance recording,
-
Low to high,
-
High to low,
-
No trip.
Re-assigning an input
1.
To assign inputs to the main IO-1 or IO-3 board, select the INPUT CONFIGURATION
column.
2.
The list of inputs that can be assigned to the main IO-1 or IO-3 board is displayed. Each
input label is preceded by DI1 and can be assigned to a contact of the IO-1 or IO-3
board.
3.
To assign inputs to the supplementary board, select the INPUT CONFIGURATION (2ND
BOARD) column.
4.
The list of inputs that can be assigned to the supplementary board is displayed. Each
input label is preceded by DI2 and can be assigned to a contact of the supplementary
board.
5.
To assign the signals to disturbance recording, select the INPUT SETTING FOR DISTURBANCE column. The possible parameters are:
-
No: does not start up disturbance recording,
-
Low to high:,
-
High to low,
-
No trip.
5-80
EPAC 3100/3500
MS/M 1.6882-C
CHECKING CONFIGURATION CONSISTENCY
Description
The overall consistency of a configuration is checked if this function is activated. It can be
accessed from most of the WinEPAC software screens and can therefore be activated after each
setting change.
Possible outcomes of a consistency test are:
-
a positive result,
-
detection of a minor error, with simple notification to the operator,
-
detection of a fatal error, with notification to the operator and inhibition of the configuration
upload to the EPAC.
Checking Consistency
From the WinEPAC software
1.
icon or press F2. This activates a consistency test on the configuration
Click on the
(it is carried out automatically when the configuration is transmitted).
2.
When the check is finished, the result is displayed in a window, indicating any inconsistencies.
Figure 5.4ah: Example of a Consistency Report
Minor error : only the faulty function is out of service.
Fatal error : the relay goes into maintenance mode and
does not protect the line.
5-81
MS/M 1.6882-C
EPAC 3100/3500
From the EPAC display
Consistency is checked when the configuration is transmitted. If an inconsistency is detected, an error message is
displayed but the type of error is not indicated.
A serious inconsistency results in the transfer being inhibited, whereas a minor one has no repercussions.
From the Protection Access Software & Toolkit software
The software checks input and output consistency automatically.
5-82
EPAC 3100/3500
5.5.
MS/M 1.6882-C
CHECKING THE RESULTS OF THE ANALOGUE VALUES
Changes in the characteristics of the permanent operating electrical network can be viewed in
real time approximately every 5 seconds.
From the WinEPAC software
1.
Click on the Measurements button of the EPAC main management screen. The screen
displaying the characteristics of the permanent operating electrical network appears.
2.
Click on the Start button to restart dynamic display of the measurements.
3.
Click on this button to stop dynamic readings every 5 seconds.
Figure 5.5a: Example of EPAC Measurements
From the EPAC display
1.
Press the
2.
Select the MES function.
3.
The instantaneous characteristics of the network are grouped together in a list and the
first two elements displayed.
4.
Press the
5.
Press the
SET
key if the display shows the self-test result.
or
SET
key to view other characteristics.
key to return to the main menu.
5-83
MS/M 1.6882-C
EPAC 3100/3500
From the Protection Access Software & Toolkit software
1.
Select the MEASUREMENTS column.
2.
The significant analogue measurements for the network are displayed.
5-84
EPAC 3100/3500
5.6.
MS/M 1.6882-C
CHECKING THE PROTECTION AND AUTOMATIC CONTROL FUNCTIONS
This is the last step of the checking procedure to make sure that the EPAC correctly carries out
its functions. In most cases, the following operations are carried out:
5.6.1.
-
creating electric faults by injecting currents and voltages,
-
checking that the functions tested react correctly. This is done from one of the user interfaces
or from the injection box.
Fault Analysis Tools
5.6.1.1. Operation Light
Tripping
Indication
TRIP
ALARM
RELAY AVAILABLE
Figure 5.6a: "Operating Box" Lights
The "TRIP" light illuminates when the EPAC trips.
Extinguishing the "TRIP" light via the WinEPAC software
1.
Click on the Events button of the main management screen of the EPAC software. The
fault report screen is displayed.
2.
Click on the Reset LEDs button. The trip light is extinguished.
Extinguishing the "TRIP" light via the EPAC display
1.
Select the LEDS option. The trip light is extinguished.
Extinguishing the Protection Access Software & Toolkit software
1.
Select the FAULT RECORDS column.
2.
Assign the value Clear Led=[0] to the FLT Trip Ind parameter.
5-85
MS/M 1.6882-C
EPAC 3100/3500
5.6.1.2. Fault Reports
Each time a fault occurs, the EPAC stores the following analogue and logic values characterising
the fault:
-
the value of the phase and voltage currents measured by the EPAC when a fault occurs,
-
the value of the frequency before the fault,
-
the tripped phase(s),
-
the results of the following (if applicable):
. phase selection,
. convergence of phase with fault in zone characteristic,
. fault resistance and distance measurements,
-
the function that tripped the circuit breaker.
These values are grouped together in a report. 10 reports can be kept in the EPAC.
When 10 reports are already stored in the EPAC, a new fault report takes the first place, the
other reports move down a place in the memory. This new fault report therefore deletes the oldest
report.
If the EPAC has a local printer connected to its front panel, the fault reports are printed out
automatically.
5-86
EPAC 3100/3500
MS/M 1.6882-C
Accessing fault reports from the WinEPAC software
The WinEPAC software can be used to access the reports stored by the EPAC and those stored
on hard disk or diskette. It can also be used to save the reports on hard disk or diskette or to
print them.
Figure 5.6b: Example of a Fault Report on the PC
Accessing fault reports stored by the EPAC
1.
Click on the Events button of the main management menu of the EPAC software. The
events screen is displayed.
2.
Click on the Protection button. The last event that has occurred is displayed. The buttons
let you view the other nine events stored.
Accessing reports stored on hard disk or diskette
1.
Click on the Events button of the main management menu of the EPAC software. The
fault report screen is displayed.
2.
Click on the Disk button. The window for selecting the saved report is displayed.
3.
Select the disk drive and directory in which the required report is stored.
4.
Select the name of the required report.
The
and
events.
icons can be used to save or to print out
5-87
MS/M 1.6882-C
EPAC 3100/3500
Accessing fault reports from the display
Only the reports stored by the EPAC are available on the
display because no saving unit is associated with this
option.
1.
If the result of the self-test appears on the display, press the
2.
Select the EVEN function.
3.
The 10 most recent fault reports can be accessed from the second line of the display. A
report is identified by EV followed by its record number.
4.
Select the report to be displayed. The fault distance unit displayed is the one selected in
the basic configuration parameters.
SET
key.
Accessing fault reports from the Protection Access Software & Toolkit software
1.
Select the FAULT RECORD column.
2.
Select the FLT Record Sel parameter.
3.
Select the number of the fault report required. The characteristics of the fault selected are
displayed.
Deleting the fault reports via the WinEPAC software
1.
Click on the Events button of the main management screen of the EPAC software. The
fault report screen is displayed.
2.
Click on the Efface Events button. The fault reports recorded by the protection device are
deleted when the password is entered.
Deleting the fault reports via the WinEPAC display
1.
Select the EVEN option, then the EFF option.
2.
The fault reports recorded by the protection device are deleted when the password is
entered.
Deleting the fault reports via the Protection Access Software & Toolkit software
1.
Select the FAULT RECORDS column.
2.
Assign the value Clear Rec = [0] to the FLT FAULTS parameter. The fault reports recorded
by the protection device are deleted when the password is entered.
5-88
EPAC 3100/3500
5.6.2.
MS/M 1.6882-C
Functional Tests
5.6.2.1. Fault Simulation Principles
Simulating a single-phase fault:
The remote protection detects a single-phase fault in E if the impedance and phase of this point
place it inside the characteristic. The relation of the impedance and phase compared with the
injected voltage and current is the following:
-
Fault Impedance = Vphase/Iphase,
-
Fault Phase = phase-shift (Vphase,Iphase),
-
the Vphase voltage must remain lower than the rated voltage.
To simulate a fault in a zone, the current must be made to vary gradually so that the point moves
inside the desired zone.
Simulating a two-phase fault:
The principle of the two-phase fault simulation is the same as the principle for simulating a singlephase fault, with the following differences:
-
the reference voltage is the line to line voltage between phases, for example Uab,
-
the reference current is the difference between phase currents, for example Ia - Ib,
-
fault impedance = (Uphase-phase/(Iphase1 - Iphase2)).
Distance X
Xlim
Z
E
-Rlim
ϕ
Resistance R
Rlim
-Xlim
Figure 5.6c: Determining a Characteristic Point
5-89
MS/M 1.6882-C
EPAC 3100/3500
5.6.2.2. Plotting the Start-Up Characteristics
Checking the Characteristic for a Single-Phase Fault
1.
Energize the EPAC from a network that is unaffected by faults.
2.
Vary the current so that the ratio between V and I of Rlim, the phase-shift between V and
I should be 0°.
3.
Check that the tripping order is sent after the T1 time delay has expired.
4.
Repeat steps 2 and 3 for the other limit points of the characteristic by referring to table
5.6e and figure 5.6f.
Any other characteristic point can be tested once the
impedance and phase-shift between U and I has been
calculated.
Point
I, V Phase-Shift
Tripping Time
R1B
0°
R1M
0°
T1
R2
0°
T2
R3
0°
T3
Rlim
0°
T4
X1
+90°
T1
X2
+90°
T2
X3
+90°
T3
X4
+90°
T4
X5
-90°
T4
T1
Table 5.6d: Parameters of the Zone to be Tested
If a tester generating transient current values of over 0.2 In
is used when a fault condition is generated, an error can
occur in the directional calculation with the high-speed
algorithms. This is because the test boxes never reflect the
real fault appearance conditions during the fault condition.
To prevent this from interfering with verification of the startup zones, you are advised to inhibit the high-speed
algorithms by setting T1 to 50 ms when setting zones (highspeed algorithms cannot be used over 40 ms). This
situation arises with the digital injection boxes. For further
details, see the documentation for these injection boxes.
5-90
EPAC 3100/3500
MS/M 1.6882-C
X4
Zone 4 (T4)
X3
Zone 3 (T3)
X2
X1
Zone 2 (T2)
K01
Zone 1 (T1)
R1B
R1M
-Rlim
R2
R3
Rlim
Zone 5 (T5)
X5
Figure 5.6e: Limit Points of the Characteristic to be Tested
Checking the characteristic for a two-phase fault
Repeat the same tests as before, but with the following differences:
-
the reference voltage is the line to line voltage between phases, for example Uab,
-
the reference current is the difference between the phase currents, for example Ia - Ib,
-
the fault impedance = (Uphase-phase/(Iphase1 - Iphase2)),
-
the R1M point is replaced by the R1B point.
5.6.2.3. Testing the Operation of the Protection in Teleaction Mode
Testing teleaction modes
1.
Select the first mode in table 5.6g from the WinEPAC.
2.
Create the fault indicated in the second column of the table, the teleaction input is
activated.
3.
Check that the tripping contact is activated after the time delay given in column 3 has
expired.
4.
Repeat steps 2 and 3 but de-activate the teleaction input and check the time delay given
in the 4th column of the table.
5-91
MS/M 1.6882-C
EPAC 3100/3500
5.
Repeat steps 2 to 4 for faults in other zones and check that the time delays associated
with each zone are not changed whatever the status of the teleaction input.
6.
Repeat steps 1 to 5 for all the teleaction modes indicated in the table.
Teleaction Mode
Fault to be
Created
Time-Delay to be
with Teleaction
Time-Delay to be
without Teleaction
Accelerated
underreach mode
in zone 2
T1 < t < T1 + 40 ms.
T2 < t < T2 + 40 ms.
Permissive Overreach
mode
in zone 1
T1 < t < T1 + 40 ms.
T2 < t < T2 + 40 ms.
Blocking underreach
mode
in zone 2
T2 < t < T2 + 40 ms.
TT < t < TT + 40 ms.
Blocking overreach
mode
in zone 1
T2 < t < T2 + 40 ms.
TT < t < TT + 40 ms.
Permissive underreach
mode
all zones
T1 < t < T1 + 40 ms.
Step time delay
associated with the zone
Table 5.6f: Teleaction Test
T1: time delay of step 1
T2: time delay of step 2
TT: time delay of transmission
Testing the weak infeed mode
1.
Do the following using WinEPAC:
-
put the weak-infeed mode into service,
-
inhibit the voltage drop acceptance and the tripping authorization.
2.
Activate the teleaction input.
3.
Check the following:
-
the teleaction transmission signal is activated,
-
the tripping contact is not activated.
4.
Confirm three-phase tripping authorization using WinEPAC.
5.
Activate the teleaction input.
6.
Check the following:
-
the teleaction transmission signal is activated,
-
the closing of tripping contacts.
5-92
EPAC 3100/3500
MS/M 1.6882-C
7.
Confirm the voltage drop acceptance using WinEPAC, regulate the threshold to 0.4 VN
and VB = -VC = VN, validate the authorisation of monophase tripping.
8.
Activate the teleaction input.
9.
Check the following:
-
the teleaction transmission signal is activated,
-
the protection trips monophase phase A.
5.6.2.4. Testing the Operation of the Protection when a Fuse failure
1.
Energize the EPAC from a network that is unaffected by faults:
-
Vn phase voltages,
-
In phase currents
2.
Cut the power supply from phase A.
3.
Check the following:
-
the fuse failure signal is activated after the time delay signals,
-
the tripping and protection start-up signals are not activated.
4.
Re-energize the EPAC from a network that is unaffected by faults.
5.
Cut the power supply from phase A and create a fault that has a fault current higher than
the programmed threshold.
6.
Check that the tripping contact is activated.
5.6.2.5. Test of the Overload Protection
EDF-type overload protection, with 3 constant current thresholds.
1.
Energize the EPAC from a network that is unaffected by faults:
-
Vn phase voltages,
-
In phase currents.
2.
Set S1, S2 and S3 time delays to 20 mn, 10 mn and 20 s.
3.
Increase one of the phase current inputs until it is between I1 and I2.
4.
Check that the MaxI alarm signal is activated.
5.
Check that the three-phase tripping contact is activated after 20 mn.
6.
Repeat steps 1 to 4 but increase the current until it is between I2 and I3 and check that
the tripping occurs after 10 mn.
7.
Repeat steps 1 to 5 but increase the current until it is higher than I3 and check that the
tripping occurs after 20 secs.
8.
Repeat steps 1 to 3. When the MaxI alarm signal is activated, reduce the current to
0.9I1 and check that the MaxI alarm signal is no longer activated.
5-93
MS/M 1.6882-C
EPAC 3100/3500
Inverse time overload protection
1.
Energize the EPAC from a network that is unaffected by faults:
-
Vn phase voltages,
-
In phase currents.
2.
Increase one of the phase current inputs until Ir/Ithreshold is equal to 1.5.
3.
Check that the tripping contact is activated after a given time delay that is determined
from the IEC and ANSI curves given in the appendix.
4.
Repeat steps 1 to 3 for the Ir/Ithreshold values 5 and 10.
5.6.2.6. Undervoltage Protection Test
1.
Activate the circuit-breaker Position Input.
2.
Energize the EPAC from a network that is unaffected by faults:
-
Vn phase voltages,
-
In phase currents.
3.
Reduce one of the phase voltages until it is equal to 90% of the configured MinU threshold.
4.
Check that the MinU alarm signal is activated.
5.
Check that the tripping contact is activated after the configured time delay has expired.
6.
Repeat steps 1 and 2 then increase the phase voltage until it reaches Vn.
7.
Check that the MinU alarm signal is no longer activated.
8.
Position the Circuit Breaker Position input to 0.
9.
Repeat steps 2 to 4 then check that the tripping contact is not activated.
5.6.2.7. Overvoltage Protection Test
1.
Energize the EPAC from a network that is unaffected by faults:
-
Vn phase voltages,
-
In phase currents.
2.
Increase one of the phase voltages until it is equal to 110% of the configured MaxU
threshold.
3.
Check that the MinU alarm signal is activated when the configured time delay expires.
4.
Repeat steps 1 and 2 then reduce the phase voltage until it reaches Vn.
5.
Check that the MaxU alarm signal is not activated.
5-94
EPAC 3100/3500
MS/M 1.6882-C
5.6.2.8. DEF Protection Test
Directional Comparison Protection
1.
2.
Energize the EPAC from a network that is unaffected by faults:
-
Vn phase voltages,
-
In phase currents.
Increase the phase A current and decrease the phase A voltage input so that a residual
current and a residual voltage are created that are greater than the configurable Ir and
Vr thresholds.
The variations in current and voltage must not start-up the
distance protection device. Check that the distance protection start-up signal is not activated.
3.
Activate the teleaction input(s) required, depending on the teleaction configuration of
the directional comparison protection device.
4.
Check that the following signals are activated when the time delay associated with the
directional comparison protection device has expired:
-
Tripping by additional protection,
-
Tripping A,
-
Teleaction Transmission.
5.
Repeat steps 1 to 3 but simulate a B single-phase fault then a C single-phase fault.
6.
Repeat steps 1 to 3 but simulate a resistive three-phase fault and check that the tripping
contact is activated.
7.
Simulate a reverse resistive fault and check that the protection does not trip. The current
threshold for a reverse resistive fault is 0.6 Ir.
Inverse time, zero sequence current protection
1.
2.
Carry out the following operations using the WinEPAC software:
-
deactivate the directional comparison protection,
-
activate the current backup protection,
-
select either the IEC or ANSI curve.
Energize the EPAC from a network that is unaffected by faults:
-
Vn phase voltages,
-
In phase currents.
5-95
MS/M 1.6882-C
3.
EPAC 3100/3500
Increase the phase A current input.
The variations in current must not start-up the distance
protection device. Make sure that the remote protection
start-up signal is not activated.
4.
Check that the tripping contact is activated after a time delay expires for different values
of Ir/Ithreshold. This time delay is determined from the selected IEC or ANSI curve with
the configured operating time added.
Test of the inverse time, zero sequence power protection
1.
Repeat the inverse time, negative sequence current protection test but select the zero
sequence power protection and check the time delays in accordance with the following
equation:
Tripping time = 0.2 x P(So/Sr) + Tfon
where: So = 10 x Ua; Sr = Ur x Ir
P = Configured multiplier factor
Tfon = Configured operating time delay
5.6.2.9. Automatic Recloser Control Test and Check synchronising
General recloser operation
1.
Carry out the following operations using the WinEPAC software:
-
put the recloser automatic control device into service,
-
select single-phase reclosing mode on single-phase tripping,
-
select three-phase reclosing mode on three-phase tripping.
2.
Simulate an A single-phase fault in zone 1 (refer to the distance protection test).
3.
Check that the "1 pole reclosing cycle in progress" signal is activated.
4.
Check that the associated dead time comply with the configured time delays. These time
delays are checked by observing the status of the following signals:
-
cycle in progress (three-phase or mono-phase),
-
circuit-breaker closing,
-
blocking.
!
The duration of a tripping signal must be lower than
300 ms. Otherwise, the reclosing cycles are locked.
5-96
EPAC 3100/3500
MS/M 1.6882-C
Disabling the recloser
1.
Activate the "Auto-recloser disabled" input.
2.
Repeat steps 1 and 2 of the previous test and check that the recloser is inhibited.
Fault on manual closing
1.
Activate the "Manual reclosing" input for 1 sec. (time delay for blocking > 1 sec.).
2.
Simulate a single-phase fault during the blocking time delay.
3.
Check the following:
-
the circuit breaker is definitively tripped in three phase mode,
-
the recloser locking signal is activated.
Fault during a single-phase cycle
1.
Simulate a single-phase fault.
2.
During the single-phase high-speed cycle, simulate a fault on the two phases that are
unaffected by faults.
3.
Check the following:
-
the ARL single-phase cycle signal is not activated,
-
the ARL three-phase cycle signal is activated.
Poles discrepancy
1.
Simulate a single-phase fault.
2.
Deactivate the "poles discrepancy" input during the single-phase high-speed cycle.
3.
Check the following:
-
the ARL single-phase cycle signal is no longer activated,
-
the ARL three-phase cycle signal is activated.
Recloser Blocking
1.
Simulate a single-phase fault.
2.
Activate the "Auto-recloser low pressure" input during the high-speed single-phase cycle.
3.
Check the following:
4.
-
the 1-pole reclosing cycle in progress signal is no longer activated,
-
the auto-recloser blocking signal is activated.
Repeat steps 1 to 3 but check that the recloser is blocked when the "Reclosing impossible" input is activated.
5-97
MS/M 1.6882-C
EPAC 3100/3500
Zone reach control
1.
Enable the "carrier receive" input.
2.
Simulate a zone 2 single-phase fault.
3.
Check that the protection trips when T1 expires.
Auto-recloser blocked at T2
1.
Simulate a single-phase fault in zone 2 for tripping at T2.
2.
Check the following:
-
the tripping contact is activated,
-
no reclosing cycle is activated,
-
the autorecloser blocking contact is activated.
Live busbar, dead line mode test
1.
Carry out the following operations using WinEPAC:
-
disable the auto-recloser,
-
put the check synchronising in service with this mode.
2.
Inject a busbar voltage that is greater than the configured voltage presence threshold,
and a line voltage less than the voltage absence threshold.
3.
Check that the "Auto-recloser enabled by synchro-check" signal is activated after
100 ms.
Dead busbar, live line mode test
1.
2.
Repeat the same operations as for the previous test, but with the following differences:
-
put the check synchronising into service,
-
inject a line voltage that is greater than the configured voltage presence threshold
and a bar voltage that is less than the voltage absence threshold.
Verify that at the end of 100 ms, the signal "Auto-recloser enabled by synchro-check" is
activated.
Live busbar, live line mode test
1.
Carry out the following operations using WinEPAC:
-
disable the auto-recloser,
-
enable the check synchronising.
2.
Inject a busbar voltage and a line voltage that are greater than the configured thresholds. The difference in amplitude, phase and frequency between the two voltages must
be less than the configured thresholds.
3.
Check that after the settable time delay has expired, the "Auto-recloser enabled by
synchro-check"signal is activated.
5-98
EPAC 3100/3500
4.
MS/M 1.6882-C
Repeat steps 2 and 3 but check that if there is a difference in amplitude, phase or
frequency between the line and busbar voltages, the check synchronising conditions are
not verified and the "Auto-recloser enabled by synchro-check" signal is inhibited.
Test of live busbar/dead line, dead busbar/live line, live busbar/live line mode
1.
Select live busbar/dead line, dead busbar/live line, live busbar/live line mode.
2.
Repeat the three previous tests.
Test of auto reclose - voltage check synchronising co-ordinated operation
1.
Repeat the tests carried out for the auto recloser but by injecting the busbar and line
voltages so as to obtain the "Auto-recloser enabled by synchro-check" signal in compliance with the selected voltage synchronising check mode.
2.
Check that the "Auto-recloser enabled by synchro-check" signal during a slow cycle is
accepted.
5.6.2.10.
Fault Locator Test
1.
If the Locator option is integrated into the EPAC, put it into service.
2.
If an EPAC is located on a double line, energize the UTMH analogue input from a BCH
case.
3.
Simulate the solid single-phase and resistive single-phase faults as well as the solid twophase and solid resistive two-phase and solid three-phase faults for fault positions at
20%, 50%, 80% and 100% of the line.
4.
Using WinEPAC, check the accuracy of the values recorded by the fault locator. If the
locator option is in service, the accuracy of the remote measurement should be better
than 3% with a minimum error of 400 meters.
The relay indicates by (L) if the result is provided by the fault locator.
MS/M 1.6882-B
EPAC 3100/3500
CHAPTER 6
MAINTENANCE
EPAC 3100/3500
MS/M 1.6882-B
BLANK PAGE
6-1
MS/M 1.6882-B
EPAC 3100/3500
CONTENTS
PAGE
6.1.
6.1.1.
6.1.2.
ANALYSING THE RESULTS OF THE SELF-TESTS _____________________________________ 6-4
Maintenance Lights __________________________________________________________ 6-4
Maintenance Dialogue ________________________________________________________ 6-6
6.2.
6.2.1.
6.2.2.
6.2.3.
6.2.4.
6.2.5.
COMPLEMENTARY TESTS TO THE SELF-TEST ______________________________________ 6-14
Fast Check _________________________________________________________________ 6-14
Checking the Connections _____________________________________________________ 6-14
Tests for Checking the Active Operation of the Inputs and Outputs __________________ 6-15
Checking the Contacts of the Logic Inputs _______________________________________ 6-15
Checking the Tripping Contacts and the Signalling Contacts ________________________ 6-16
6.3.
6.3.1.
6.3.2.
6.3.3.
6.3.4.
6.3.5.
6.3.6.
6.3.7.
6.3.8.
REPAIRING THE BOARDS _____________________________________________________ 6-18
Repairing the Converter Board ________________________________________________ 6-19
Repairing the TMS Board _____________________________________________________ 6-21
Repairing the QTF Board _____________________________________________________ 6-22
Repairing the main IO-1 or IO-3 Board _________________________________________ 6-24
Repairing the additional IO-1, IO-3, or IO-2 board _______________________________ 6-25
Repairing the AC Board ______________________________________________________ 6-26
Repairing one of the daughter boards of the AC Board ____________________________ 6-27
Repairing the IRIG-B board ___________________________________________________ 6-28
6-2
EPAC 3100/3500
MS/M 1.6882-B
BLANK PAGE
6-3
MS/M 1.6882-B
EPAC 3100/3500
This chapter describes the maintenance tools and procedures used with the EPAC. In particular,
it describes the corrective maintenance required by the equipment because:
-
the self-tests that are carried out regularly and on start-up automatically check that the
equipment is operating correctly,
-
there is no need to implement preventive corrective action or replacements because the EPAC
does not contain any components that age rapidly.
The first part describes the analysis of the fault reports for faults that were detected by the selftest, and in particular how the hexadecimal codes characterising these faults are interpreted.
The way these reports are accessed from the user interfaces is also described.
The second part describes the additional tests used to check the functions that were not tested
by the EPAC self-test.
The third part describes the procedures for repairing the different boards of the EPAC.
Obviously, these procedures should only be implemented if a failure is detected by the self-test
and if the analysis of the corresponding report has allowed the faulty board to be accurately
identified.
6-4
EPAC 3100/3500
6.1.
MS/M 1.6882-B
ANALYSING THE RESULTS OF THE SELF-TESTS
The EPAC self-tests check the operation of 90% of the active components. They detect the
majority of faults that can affect the EPAC.
If the equipment fault, non-urgent alarm and urgent alarm signalling contacts are connected to
a monitoring system, any failure detected by the EPAC is indicated to the user. If the signalling
contacts are not connected to a monitoring system, it is wise to regularly check the condition of
the EPAC.
A fault detected by the self-test must be acknowledged from one of the user interfaces, in order
to stop the alarm.
If a fault shuts down the functions of the EPAC, the following
happens:
- the equipment fault alarm is activated,
- the major fault alarm is activated if the product is in
maintenance mode (the micro-processor is still in service).
Some anomalies can block the operation of the program
and may only cause the equipment fault alarm to be
activated.
6.1.1.
Maintenance Lights
The maintenance lights on the front panel of the EPAC 3100/3500 indicate the following
information:
-
urgent and non urgent failure, a major fault that causes the EPAC to shut down,
-
the status of the EPAC.
In normal operating mode, the "RELAY AVAILABLE" light must flash and the "ALARM" light must
be off.
Minor and major alarm
indication
Correct operation
indication
TRIP
ALARM
RELAY AVAILABLE
Figure 6.1a: "Maintenance Box" Lights
6-5
MS/M 1.6882-B
EPAC 3100/3500
If the "RELAY AVAILABLE" light is not on:
1.
Check the power supply voltage.
2.
If the power supply voltage is faulty, energize the converter correctly.
3.
If the power supply voltage is correct, the voltages at the converter output are not correct. Open the EPAC front panel.
4.
Check the status of the converter lights located on the top right-hand side.
If the EPAC is equipped with a Melcher(1):
In normal operation, the green light is on. The red lights indicate power supply or voltage faults.
OUTPUT
OK i
Ut
I oL
1
2
MELCHER
Figure 6.1b: The Melcher Module Lights
Red light
is on if
i
the power supply is insufficient.
1
the load is too high on the 5 V.
2
the load is too high on the 12 V.
If the EPAC is equipped with an SEB(1):
In normal operation, the green light is on.
5.
(1)
If the converter lights cannot be used to identify the fault, the voltages of the following
equipment items should be checked:
-
the ribbon cable connectors of the TMS board,
-
the Converter board output connector.
6.
If one of the voltages is absent, remove the boards one after another and test the voltages each time you remove a board.
7.
If you remove a board and the power supply fault signal is cleared, replace the board
with another one.
Melcher and Seb are the names of converter manufacturers.
6-6
EPAC 3100/3500
MS/M 1.6882-B
8.
If no board has a power supply fault, check that there is no short circuit between the
power supply tracks on the back panel bus.
9.
If the isolation is faulty, change the rack.
10.
If the isolation is correct, replace the converter board with another one.
TMS Board Ribbon
Ribbon Cable
Connector Pin
Voltage to be
Checked
Pins of the Output
Connector of the
Converter Board
Voltage to be
Checked
1
+12V
A3, B3, C3
+12V
2
+12V
A4, B4, C4
+12V
3
+12V
A5, B5, C5
+12V
4
+12V
A6, B6, C6
+12V
5
0V
A8, B8, C8
0V
6
0V
A9, B9, C9
0V
7
+5V
A10, B10, C10
0V
8
+5V
A11, B11, C11
0V
9
+5V
A13, B13, C13
+5V
10
+5V
A14, B14, C14
A15, B15, C15
A16, B16, C16
+5V
+5V
+5V
The following operations should be carried out if the "ALARM" light is on:
The failure type and its severity must be accurately identified before carrying out any work on
the board. This information is recorded in a fault report that can be accessed from the
maintenance dialogue. This dialogue is described in the following sub-division.
6.1.2.
Maintenance Dialogue
The EPAC maintenance dialogue is used for the following operations:
-
to acknowledge a failure detected by the self-test so that the EPAC stops operating in downgraded (maintenance) mode,
-
to display a fault report.
When a failure is detected by the self-test, the EPAC automatically records the characteristic
values of the fault in a report. This report accurately identifies a failure. It can be displayed using
the WinEPAC software or using the front panel display.
6-7
MS/M 1.6882-B
EPAC 3100/3500
The fault report contains the following information:
-
the board(s) detected as faulty by the self-test,
-
the severity of the failure,
-
the type of failure,
-
the error word associated with the fault (this error word is reserved for the expert assessment).
This data is in hexadecimal code. The encoding system minimises the memory space taken up
by a report and thus lets the EPAC keep up to 10 control reports of the product.
6.1.2.1. Encoding the Maintenance Data
Encoding the Faulty Boards
Hexadecimal Code
Faulty Board
COURIER Message
0
None
1
UC-TMS
EP
2
IO-1or IO-3
IO-1
4
IO-2 or IO-1 or IO-3
IO-2
10
AFF
LDU
20
COM (not used on the EPAC )
COM
40
AC or one of its daughter boards
AC
80
IRIG-B
IRIGB
If several boards are detected as being faulty, their codes are added together. For example, if
the AFF and the UC-TMS boards are faulty, the resulting code is 11.
If an input/output board is faulty, EPAC will indicate that the fault might result from the I0 board
or the TMS board.
Encoding the Severity of the Failure
By adding together corresponding codes, the severity code of the failure gives the following
information:
-
when the fault was detected,
-
the severity of the fault,
-
the cyclical repetition of the fault - if any.
6-8
EPAC 3100/3500
MS/M 1.6882-B
Hexadecimal Code
Failure
COURIER Message
1
detected when the EPAC
is initialised
INIT Detection
2
detected during operation
BGND
4
major causing the EPAC
to shut down
Major
(ERROR)
8
minor causing operation
in downgraded mode
Minor
(Warning)
10
repetitive
dt<cons
Encoding the Fault Type
5 hexadecimal codes accurately define the type of fault detected by the self-test. The
maintenance action that should be carried out on the EPAC is limited to level 1 maintenance
(replacing the board, fuse, etc). This type of fault code is used by the technicians of GEC
ALSTHOM T&D P&C in particular, who will repair any faulty boards. Only some codes indicate
the problems that can be solved with level 1 maintenance without having to replace a board.
The list of fault type codes is given in the appendix. An asterisk indicates those codes that are
used for level 1 maintenance.
If a faulty board needs to be returned to the product support
department of GEC ALSTHOM T&D P&C for repairs,
enclose all the codes identifying the failure with the
returned equipment.
6.1.2.2. Using the Maintenance Dialogue with the WinEPAC Software
Activating the maintenance dialogue
1.
If WinEPAC is not activated:
1a.
Click on the
icon. The software is loaded into memory. After a few mo-
ments, the main menu is displayed.
1b.
2.
Click on the EPAC button.
Click on the Maintenance button. The current status of the EPAC is displayed in a dialogue box.
6-9
MS/M 1.6882-B
EPAC 3100/3500
Figure 6.1c: Protection Status Window
Acknowledging faults detected by the protection device
1.
Click on the Acknowledge button. The PC tries to communicate with the EPAC. If the
communication between the equipments is correct, the current fault can be acknowledged. The protection device runs a complete self-test. If the fault is acknowledged, the
EPAC replies "Protection OK". If not, the error code indicates the nature of the fault.
Alarms must be systematically acknowledged when any
fault is detected by the product or after any repair.
Displaying fault reports stored in memory in the EPAC
1.
Select the Reports option. The last report stored in the EPAC memory is displayed. The
report reference is given by a record number indicated in the zone at the top right of the
window.
6-10
EPAC 3100/3500
MS/M 1.6882-B
Figure 6.1d: Example of a Fault Report
2.
To acknowledge the last fault, click on the Acknowledge button. The password is then
requested.
3.
Accessing other reports:
Click on button
to access
the next report.
the previous report.
the last report.
the first report.
If the EPAC does not have the AC board option, the date
will not be saved if there is a break in the auxiliary power
supply. In this case, you may find record numbers with the
wrong dates.
When the EPAC carries out a complete initialisation self-test without detecting any anomalies,
the test result is saved as a fault report. This report indicates:
-
faulty board: code 0,
-
seriousness of fault: code 1,
-
fault type 1: code 40,
-
other fault types: code 0.
6-11
MS/M 1.6882-B
EPAC 3100/3500
Deleting the fault reports via the WinEPAC software
1.
Click on the Maintenance button of the main management screen. The main maintenance screen is displayed.
2.
Click on the Reset Self-tests button. The fault reports recorded by the protection device
are deleted when the password is entered.
Changing the date and time of the EPAC
1.
From the main management screen, click on the Commands button. The main order
screen appears.
2.
Click on the Date button. The setting screen for the date and time appears.
6.1.2.3. Using the Maintenance Dialogue from the Display
The protection status is displayed by default on the second line of the display several minutes
after the keyboard keys below the display were last used.
EPAC 3000 "Version"
PROTECTION OK
SET
Help
Figure 6.1e: Display of the Protection Status on the Front Panel
Activating the maintenance dialogue
1.
If the protection status is displayed, press the
2.
Select MAINT.
SET
key.
The DATE, ACQ, LIST and EFF options are displayed on the second line.
Displaying the fault reports
1.
Select LIST. The labels of the last ten reports are available on the second line. Each label
contains Df followed by its number between 1 and 10.
2.
Select the label of the report to be displayed.
3.
The fault characteristics are grouped together in a list, the first two elements of which are
displayed.
6-12
EPAC 3100/3500
4.
Press the
5.
Press the
MS/M 1.6882-B
and
SET
keys to display the other fault characteristics.
key to return to the main menu.
Acknowledging a failure
1.
Select the ACQU option. If the password has not already been typed in with the PASS
INPUT option, a message prompts the user to type in the password.
If the password is correct the current fault can be acknowledged. The protection device
runs a complete self-test. If the fault is acknowledged, the EPAC replies "Protection OK".
If not, the error code must be analysed.
Alarms must be systematically acknowledged after the
detection of any fault or after any repair.
Deleting the fault reports via the EPAC display
1.
Select the MAIN option, then the EFF option.
2.
The fault reports recorded by the protection device are deleted when the password is
entered.
Changing the time reference of the EPAC
1.
Select the DATE option. The Date and Time options are displayed on the second line.
2.
Select the Time option.
3.
Enter the new time.
4.
Once the option has been changed, press the
5.
Press the
SET
key.
key. The new time is automatically transmitted to the EPAC.
Changing the date reference of the EPAC
1.
Select the DATE option. The Date and Time options are displayed on the second line.
2.
Select the Date option.
3.
Enter the new date.
4.
Once the option has been changed, press the
5.
Press the
SET
key.
key. The new date is automatically transmitted to the EPAC.
6-13
MS/M 1.6882-B
EPAC 3100/3500
6.1.2.4. Using the Maintenance Dialogue from the Protection Access Software & Toolkit software
Acknowledging a fault
1.
Select the MAINTENANCE DATA column.
2.
Assign the value Reset = [0] to the Alarms Ind parameter.
Deleting the fault reports via the Protection Access & Toolkit software
1.
Select the MAINTENANCE DATA column.
2.
Assign the value Clear Rec = [0] to the Maint. parameter. The fault reports recorded by
the protection device are deleted when the password is entered.
Changing the date and time of the EPAC
1.
Select the USER CONTROLS column.
2.
Set the RLY RealTime parameter to the date and time.
Alarms must be systematically acknowledged when any
fault is detected by the product or after any repair.
6-14
EPAC 3100/3500
6.2.
MS/M 1.6882-B
COMPLEMENTARY TESTS TO THE SELF-TEST
The aim of these tests is to check the elements that are not covered by the self-test because they
are located on the periphery of the EPAC. The following elements are mainly concerned:
6.2.1.
6.2.2.
-
the primary windings of the input transformers,
-
the contacts of the IO board relays,
-
the connections for the analog and logic signals,
-
the connected inputs-outputs.
Fast Check
1.
Connect the EPAC to a three-phase injection box.
2.
Energise the EPAC with 3 voltages unaffected by faults, with VN amplitudes, and 3
currents in phase with In amplitudes.
3.
Check in the WinEPAC Measurements window that:
-
the phase voltages are between 0.90 Vn and 1.10 Vn;
-
the phase currents are between 0.9 In and 1.1 In;
-
the active power values are between 0.9 Pn and 1.1 Pn.
4.
Energise the EPAC with 3 voltages unaffected by faults, with VN amplitudes, and 3
currents in antiphase with In amplitudes.
5.
Check in the WinEPAC Measurements window that:
-
the phase voltages are between 0.9 Vn and 1.1 Vn;
-
the phase currents are between 0.9 In and 1.1 In;
-
the active power values are between -0.9 Pn and -1.1 Pn.
6.
Polarise the 8 digital inputs of the IO-1 or IO-3 board and check in the Measurements
window that the DI’s of the IO-1 or IO-3 board are set to 1.
7.
Polarise the 8 digital inputs of the (optional) supplementary IO-1 or IO-3 board and
check in the Measurements window that the DI’s of the supplementary IO-1 or IO-3
board are set to 1.
8.
Assign the Unlock Transmission output to DO no. 1 of the main (IO-1 or IO-3) board
(associated with reduced range mode and acceleration) and check in the Measurements window that bit no. 1 of the main board in the contacts representation field is set
to 1.
9.
Repeat this operation for the other contacts of the main board and, if appropriate, for
those of the additional board contacts.
Checking the Connections
1.
Cut the power supply from the EPAC.
2.
Check the electrical continuity of the EPAC primary windings.
3.
Remove the connectors from the EPAC.
4.
Check that the 9/10 (for the main IO-1 or IO-3 board) and/or 15/16 (for the additional
IO board) equipment fault contacts of the X6 connector are closed.
6-15
MS/M 1.6882-B
5.
6.2.3.
EPAC 3100/3500
Check the status of the connector pins.
Tests for Checking the Active Operation of the Inputs and Outputs
These tests complete the results of the self-test. The protection device operates in real values when
injection devices are used.
The procedure depends on the way in which the protection device has been configured. This
configuration should not be changed.
The following operations are necessary to make sure that the step 1 or 2 trippings are singlephase:
6.2.4.
-
a voltage before the fault should be simulated,
-
the module (magnitude) and/or argument (angle) of this voltage should vary when the fault
occurs.
Checking the Contacts of the Logic Inputs
The following procedures are used to check that the EPAC behaves correctly when it receives
logic orders.
The following operations are necessary to check these contacts:
-
program all the inputs with a function whose effects can be easily checked and repeat the
procedure for all the inputs then re-load the former assignments, or,
-
check all the programmed inputs without modifying the configuration.
Protection Locking Reception Input Test
1.
Set the Protection Locking input to the high level.
2.
Simulate a fault in zone 1.
3.
Make sure that the EPAC does not trip.
Ordinary three-phase tripping input test
This test should only be carried out if the tripping in zone
1 is configured as single-phase tripping.
1.
Activate the ordinary three-phase tripping input.
2.
Simulate a single-phase fault in zone 1.
3.
Check that the EPAC transmits a tripping order in three-phase mode.
Teleaction Reception Input Test
Do not perform this test if the EPAC is programmed in "No
Teleaction" mode.
1.
Simulate a fault in zone 2 if the EPAC is in reduced range (underreach) mode.
6-16
EPAC 3100/3500
MS/M 1.6882-B
2.
Simulate a fault in zone 1 if the EPAC is programmed in extended range (overreach)
mode.
3.
Put the Teleaction Reception input to the high level less than 10 ms after the fault occurs.
4.
Tripping must occur in step 2 if the EPAC is programmed in locking mode.
5.
Tripping must occur in step 1 if the EPAC is programmed in permissive overreach or
acceleration mode.
Carrier Presence Input Test
This test should only be performed if the EPAC is programmed in "Unlocking" or "HF acceptance" mode.
6.2.5.
1.
Put the Teleaction Reception input to the low level and the Carrier Presence input to the
high level.
2.
Simulate a fault in zone 2.
3.
Put the carrier presence input to the low level less than 100 ms after the fault occurs.
4.
Check that the EPAC trips in step 1.
Checking the Tripping Contacts and the Signalling Contacts
The following procedures are used to check that the tripping contacts and signalling contacts
behave correctly.
The following operations should be performed in order to check the contacts:
-
program the signalling contacts with a meaning that is easy to generate and repeat the
procedure for all the contacts, then re-load the former assignments, or,
-
check the contacts without modifying the parameters.
Testing the contacts associated with a phase A (B, C) single-phase fault in zone 1
1.
Simulate a phase A (B, C) single-phase fault in zone 1.
2.
Check that the following contacts are activated:
-
Phase A (B,C) tripping,
-
Phase A (B, C) tripping signal,
-
Tripping signal,
-
A (B,C) selection,
-
Start-Up,
-
Zone 1,
-
Forward directional,
-
Single-phase fault,
-
Teleaction transmission (if programmed),
-
Additional transmission (if programmed),
6-17
MS/M 1.6882-B
-
EPAC 3100/3500
Tee line teleaction transmission (if programmed).
Testing the contacts associated with a two-phase fault in zone 2 with teleaction reception
1.
Simulate a two-phase fault in zone 2.
2.
Position the Teleaction Reception input to the high level.
3.
Check that the following contacts are activated:
-
Multiphase Fault,
-
Zone 2.
Testing the contacts associated with a two-phase fault in zone 3
1.
Simulate a two-phase fault in zone 2.
2.
Check that the following contacts are activated:
-
Multiphase Fault,
-
ARL Locking.
Testing the contacts associated with a two-phase fault in zone 5
1.
Simulate a two-phase fault in zone 5.
2.
Check that the following contacts are activated:
-
Zone 5,
-
Reverse Directional.
Testing the contacts associated with a fuse blow
1.
Energize the protection device with a balanced load current and with two voltages only.
2.
Check that the Fuse Blow contact is activated.
6-18
EPAC 3100/3500
6.3.
MS/M 1.6882-B
REPAIRING THE BOARDS
This sub-division describes the first-degree maintenance operations that can be carried out on
the EPAC. These maintenance operations are limited to checking the type of contacts and
replacing the faulty modules. These maintenance operations should only be implemented after
the faulty board has been accurately isolated using the fault report, as described in the previous
sub-section.
Before repairing the module
1.
Check the condition of the connector contacts and the components mounted on the
base.
2.
Check that the boards are correctly inserted into the corresponding guides.
3.
Re-energize the EPAC after completing these checks.
4.
Check the operation of the dubious module.
After repairing the module
1.
Install an operational module.
2.
Check all the module connections.
3.
Re-energize the EPAC.
4.
Check the operation of the dubious module by carrying out the start-up tests relevant to
the module. These tests are described in the chapter entitled "Commissioning".
!
To open the front panel:
- Locate screw on right side of panel.
- Turn carefully a quarter anti-clockwise (left).
The panel will open.
6-19
MS/M 1.6882-B
6.3.1.
EPAC 3100/3500
Repairing the Converter Board
The converter is located on the top right-hand side of the rack.
Repairing the Melcher converter
1.
Disconnect the power supply from terminals 27 and 28 of the X6 connector on the rear
panel.
2.
Open the front panel.
3.
Use an extractor to remove the converter board from its support by sliding it forwards on
the guides.
4.
Check the fuse protecting the power supply located on the board.
5.
If the fuse is "blown", replace it and check that the power supply corresponds to the
converter power supply (5A slo-blo).
6.
A second 3.15 A "slo-blo" fuse is located in the converter. Perform the following operations to get access to this fuse:
7.
-
unscrew the four screws located on the other side of the board,
-
carefully remove the converter,
-
remove the fuse by unscrewing the knob on the opposite side to the lights.
If the problem is not caused by the fuses, replace the converter board.
Fuse
Converter
+
+
+
Figure 6.3a: Side Face of the Melcher Converter Board
6-20
EPAC 3100/3500
MS/M 1.6882-B
Repairing the SEB converter
1.
Disconnect the power supply from terminals 27 and 28 of the X6 connector on the rear
panel.
2.
Open the front panel.
3.
Use an extractor to remove the converter board from its support by sliding it forwards on
the guides.
4.
Check that the power supply level on the JP2-JP3 plate corresponds to the actual power
supply of the EPAC.
5.
Check the fuse protecting the power supply on the board.
6.
If the fuse has "blown", replace it and check that the power supply value corresponds to
the converter power supply (5A "slo-blo").
7.
If the problem is not caused by the fuse or by a faulty power supply to the EPAC, replace
the converter board.
JP3 JP2
Fuse
48/60 V
220/250 V
110/125 V
Figure 6.3b: Side Face of the SEB Converter Board
6-21
MS/M 1.6882-B
6.3.2.
EPAC 3100/3500
Repairing the TMS Board
The TMS board is the first board from the top.
Procedure:
1.
2.
Disconnect the power supply from terminals 27 and 28 of the X6 connector on the rear
panel.
Open the front panel.
3.
Detach the TMS board from the analog board by disconnecting the ribbon cable connectors connecting it to the IO-1 (or IO-3) and QTF boards. The plugs are held in place
by two hooks that should be released before they are removed.
4.
Use an extractor to remove the TMS board by sliding it on its guides.
5.
Check the position of the jumpers. These jumpers determine the memory plane of the
central processing unit.
6.
Check that the components mounted on the base are correctly inserted.
7.
If the problem persists after all these checks have been carried out, replace the board
and check the position of the address jumpers on the new board.
ST12
ST6
ST11
S100
D3
D25
D26
D29
D30
D27
D28
Jumpers
D4
S400
S101
ST1
ST13
S402
S102
ST2
ST5
S104
tp1
D15
D35
D11
D14
D16
D34
tp2
D12
S103
D17
Figure 6.3c: Side Face of the TMS Board
6-22
EPAC 3100/3500
Repairing the QTF Board
The QTF board is the first board from the bottom.
Procedure:
1.
Disconnect the power supply from terminals 27 and 28 of the X6 connector on the rear
panel.
2.
Disconnect the I and U analog inputs, making sure that the necessary precautions have
been taken.
3.
Open the front panel.
4.
Detach the QTF board from the TMS board by disconnecting the cable connector located to the left. The plug is held in place by two hooks.
5.
Unscrew the three screws located on the rear panel.
6.
Use an extractor to remove the QTF board by sliding it forward on its guides.
7.
Verify that all the pin straps are closed.
8.
If the problem is not caused by the straps, replace the QTF board and check the position
of the pin straps on the new board.
S7
S5
S8
S6
S2
S1
Pin strap
S9
5A
5A
5A
5A
5A
5A
5A
U
5A
U
U
S3
U
U
S4
U
U
6.3.3.
MS/M 1.6882-B
U
Figure 6.3d: QTF Board Rear Panel and Side Face
without zero sequence current transformer
6-23
MS/M 1.6882-B
EPAC 3100/3500
S7
S8
S6
S2
S1
S5
Pin strap
S9
S4
S3
5A
5A
5A
5A
U
U
U
U
5A
5A
5A
5A
U
U
U
U
Figure 6.3e: QTF Board Rear Panel and Side Face
with zero sequence current transformer
6-24
EPAC 3100/3500
6.3.4.
MS/M 1.6882-B
Repairing the main IO-1 or IO-3 Board
The IO-1 or IO-3 board is the second board from the top.
Procedure:
1.
Disconnect the power supply from terminals 27 and 28 of the X6 connector on the rear
panel.
2.
Open the front panel.
3.
Detach the IO-1 or IO-3 board from the TMS board by disconnecting the cable connectors located to the right and left of the board. The plug is held in place by two hooks that
should be released before the main IO-1 or IO-3 board can be removed.
4.
Use an extractor to remove the main IO-1 board by sliding it on its guides.
5.
Check the position of the address jumpers.
6.
Check that the components mounted on the base are correctly inserted.
7.
If the problem persists after all these checks have been carried out, replace the board
and check the position of the address jumpers on the new board.
Main board
jumpers' position
d2
d3
Figure 6.3f: Side Face of the main I0-1 or IO-3 Board
6-25
MS/M 1.6882-B
6.3.5.
EPAC 3100/3500
Repairing the additional IO-1 or IO-3 or IO-2 Board
The additional board is located below the main (IO-1 or IO-3) board. It is optional.
Procedure:
1.
Disconnect the power supply from terminals 27 and 28 of the X6 connector on the rear
panel.
2.
Open the front panel.
3.
Detach the additional board from the TMS board by disconnecting the cable connectors
located to the right and left of the board. The plug is held in place by two hooks that
should be released before the additional board can be removed.
4.
Use an extractor to remove the additional board by sliding it on its guides.
5.
Check the position of both address jumpers. These jumpers must be positioned on IO-2.
6.
Check that the components mounted on the base are correctly inserted.
7.
If the problem persists after all these checks have been carried out, replace the board
and check the position of the address jumpers on the new board.
Additional board
jumpers' position
d2
d3
Figure 6.3g: Side Face of the additional I0-1 or IO-3 or I0-2 Board
6-26
EPAC 3100/3500
6.3.6.
MS/M 1.6882-B
Repairing the AC Board
The AC board is the second board from the left.
Procedure:
1.
Disconnect the power supply from terminals 27 and 28 of the X6 connector on the rear
panel.
2.
Disconnect the AC board connections on the EPAC rear panel.
3.
Open the front panel.
4.
If a display is installed on the EPAC front panel, detach the board from the display
module by disconnecting the ribbon cable between them. The plugs are held in place by
two hooks that should be released before they can be removed.
5.
Use extractors to remove the AC board and the network board by sliding them on their
guides.
6.
Check that the components mounted on the AC board, the daughter boards of the AC
board and the network board are correctly inserted.
7.
If the problem is not caused by the position of the components on these boards, replace
the AC board.
U23
U24
X5
U25
U26
U52
Copyright
label
X1
DS1
Figure 6.3h: Side Face of the AC Board
6-27
MS/M 1.6882-B
6.3.7.
EPAC 3100/3500
Repairing one of the daughter boards of the AC Board
The daughter boards of the AC board can be:
-
a Modem board or a Current loop board,
-
a KBUS board or a VDEW board.
These boards are fixed on the AC board as indicated on the AC board diagram.
Procedure:
1.
Disconnect the power supply from terminals 27 and 28 of the X6 connector on the rear
panel.
2.
Disconnect the AC board connections on the EPAC rear panel.
3.
Open the front panel.
4.
Remove the AC board as indicated in the previous section.
5.
Unscrew the four screws holding the daughter board to the AC board.
6.
Replace the daughter board.
7.
Tighten the screws in the new daughter board.
8.
Replace the AC board in its support and plug in the X6 connector.
Daughter boards according to table
A
Support
Screw
Current loop
2058837
Modem
2058970
A
2058680A01
B
B
X
X
VDEW
2058672
X
KBUS
2058861
X
(X6) 9069605
(X6) 9071110
2058680A02
Grounding spring
Figure 6.3i: Location of the daughter boards on the AC board
6-28
EPAC 3100/3500
6.3.8.
MS/M 1.6882-B
Repairing the IRIG-B board
The IRIG-B board is the first board from the left.
Procedure:
1.
Disconnect the power supply from terminals 27 and 28 of the X6 connector on the rear
panel.
2.
Open the front panel.
3.
Detach the board from the display module by disconnecting the ribbon cable between
them. The plugs are held in place by two hooks that should be released before they can
be removed.
4.
Use the extractor to remove the IRIG-B board by sliding it on its guides.
5.
Check the position of jumpers S2 to S5. These jumpers indicate the board gain.
6.
Check that the components mounted on the base are correctly inserted.
7.
If the problem persists after all these checks have been carried out, replace the board
and check the position of the jumpers on the new board.
d10
d6
d5
d3
d7
d9
d8
d2
d1
t1
d4
S5
Gain = 0,1
IRIGB Signal
between1,9 V
and19 V
S4
Gain = 1
IRIGB Signal
between192 mV
and1,9 V
Figure 6.3j: Side Face of the IRIG-B board
S2
Gain = 10
IRIGB Signal
between 40 mV
and 200 mV
MS/M 1.6882-B
EPAC 3100/3500
APPENDIX A
EPAC 3100/3500
MS/M 1.6882-B
BLANK PAGE
A-1
MS/M 1.6882-C
EPAC 3100/3500
CONTENTS
PAGE
TECHNICAL CHARACTERISTICS _________________________________________________________ A-3
MONITORING PARAMETERS OF THE PROTECTION FUNCTION ______________________________ A-4
COMMISSIONING REPORT ___________________________________________________________ A-10
TYPES OF BOARD FAULT _____________________________________________________________ A-28
ANALOGUE INPUT CONNECTIONS ____________________________________________________ A-31
INPUT/OUTPUT CONTACT CONNECTIONS ______________________________________________ A-33
CURVES ___________________________________________________________________________ A-40
OUT LINE __________________________________________________________________________ A-47
DIGITAL INPUTS/OUTPUTS____________________________________________________________ A-49
EPAC COURIER MESSAGES ___________________________________________________________ A-52
DISPLAY FUNCTIONS ________________________________________________________________ A-65
CONNECTIONS TO A PC OR A PRINTER ________________________________________________ A-73
EPAC FUNCTIONS / MODELS _________________________________________________________ A-76
DIGITAL OUTPUTS ALLOCATION _______________________________________________________ A-77
A-2
EPAC 3100/3500
MS/M 1.6882-C
BLANK PAGE
A-3
MS/M 1.6882-C
EPAC 3100/3500
Technical Data
Ratings
Inputs
AC current (In)
AC voltage (Vn)
DC auxiliary voltage
DC opto-isolated input voltage supply
Frequency
Permitted ripple
1 A and 5 A
100 V to 120 V in steps of 1V
Nominal (V) Operative range (V)
48
38.4 - 57.6
60
48 - 72
110
88 - 132
125
100 - 150
220
176 - 264
250
200 - 275
48 V, 60 V, 110 V, 125 V, 220 V, 250 V
50/60 Hz
12% superimposed on nominal frequency
Burdens
AC current
AC voltage
DC auxiliary voltage
Optically isolated inputs
0.1 VA at In = 1 A; 0.5 VA at In = 5 A
0.1 VA
25 W under healthy live line conditions, 35 W max.
10 mA per input
Thermal withstand
AC current inputs
AC voltage inputs
4 In continuous
100 In for 1 s; 30 In for 5 s
2.2 Vn continuous
2.6 Vn for 10 s
Reference conditions
Temperature
Auxiliary voltage
Frequency
20 °C
Nominal DC voltage range
50 or 60 Hz
Transformers turns ratios
CT ratios (Ki = CTR)
VT ratios (Ku = VTR)
1 to 20,000 in steps of 1
1 to 20,000 in steps of 1
Contact ratings
Tripping and Closing Contacts
Maximum operating voltage
Make
Permitted overload
Carry
Breaking capacity (L/R < 40 ms)
Signalling Contacts
Maximum operating voltage
Permitted overload
Carry
Breaking capacity (L/R < 40 ms)
250 Vdc
30 A and carry for 500 ms
250 A and carry for 30 ms
250 A, 30 ms
5 A continuous
0.75 A with 48 Vdc
0.3 A with 125 Vdc
0.25 A with 220-250 Vdc
250 Vdc
100 A, 30 ms
5 A continuous
0.75 with 48 Vdc
0.3 A with 125 Vdc
0.25 with 220-250 Vdc
A-4
EPAC 3100/3500
MS/M 1.6882-C
Contact durability
Loaded contact
Unloaded contact
10,000 operations minimum
100,000 operations minimum
IRIG.B
All versions 3X3X have a BNC type connector to carry IRIG-B format data for automatic setting and synchronising
the relay's calendar clock.
Settings
Line parameters
Neutral earthing
direct
isolated or Petersen coil earthed network
0.3 to 999.99 km or 0.18 to 621.49 miles in steps of 0.01
Length of line in km or miles
Range of settings in secondary values. Parameters can be entered in Cartesian co-ordinates, Polar Co-ordinates
or Positive sequence impedance/earth ratios.
Positive sequence Z1, Zero sequence Z01 and Z02 Impedance in Cartesian Coordinates
-
R1 positive sequence resistance
X1 positive sequence reactance
R01 zero sequence resistance
X01 zero sequence resistance
R02 zero sequence resistance
X02 zero sequence resistance
in
in
in
in
in
in
Polar Co-ordinates
Positive sequence impedance module, Z1
Positive sequence impedance argument
Zero sequence impedance modules Z01 et Z02
Zero sequence impedance argument
LV
LV
LV
LV
LV
LV
ohms
ohms
ohms
ohms
ohms
ohms
from
from
from
from
from
from
0.001 to 999 in steps of 0.001
0.001 to 999 in steps of 0.001
0.001 to 999 in steps of 0.001
- 999 to 999 in steps of 0.001
0.001 to 999 in steps of 0.001
- 999 to 999 in steps of 0.001
0.001 to 999 Ω in steps of 0.001 Ω
0° to 90° in steps of 1°
0.001 to +999 Ω in steps of 0.001 Ω
–90° to +90° in steps of 1°
Positive Sequence Impedance, Z1 and Earth Coefficient K01 and K02
-
X1 positive sequence reactance
R1 positive sequence resistance
imaginary parts of K01 and K02
real parts of K01 and K02 (1)
(1) Ko =
Zo − Zd
3Zd
; −1≤
(1)
Xo − Xd
3Xd
in
in
in
in
LV
LV
LV
LV
ohms
ohms
ohms
ohms
from
from
from
from
0.001 to 999 in steps of 0.001
0.001 to 999 in steps of 0.001
-1 to 7 in steps of 0.01
-1 to 7 in steps of 0.01
≤+ 7
Monitoring Parameters of the Protection Function
1A rating
Impedance Zone 1, Zone 1X, Zone 2,
Zone 3, Zone 4, Zone 5
Phase-phase resistance reach (zone 1)
Phase-earth resistance reach (zone 1)
Resistance reach zone 2
Resistance reach zone 3
Start resistance zones 4 and 5
Zone 3 direction
Step 1 timer, T1
Steps 2, 3, 4 and 5 timers: T2, T3, T4, T5
Overcurrent thresholds I> and I>>
Directionality of I> and I>>
Step timers T> and T>>
5A rating
0.1 to 200 Ω in steps of 0.01
0,02 to 40 Ω in steps of 0.01
0 to 200 Ω in steps of 0.01
0 to 40 Ω in steps of 0.01
0 to 200 Ω in steps of 0.01
0 to 40 Ω in steps of 0.01
0 to 200 Ω in steps of 0.01
0 to 40 Ω in steps of 0.01
0 to 200 Ω in steps of 0.01
0 to 40 Ω in steps of 0.01
0 to 200 Ω in steps of 0.01
0 to 40 Ω in steps of 0.01
forward/reverse
0 to 10 s in steps of 5 ms
0 to 10 s in steps of 10 ms
0.2 In to 9.99 In in steps of 0.01 In
without/forward/reverse
0 to 10 s in steps of 10 ms
A-5
MS/M 1.6882-C
Scheme functions
Tripping type
Scheme logic
HF acceptance or unblocking (line carrier)
Carrier send transmission
EPAC 3100/3500
single-phase for zones 1 and 2
single-phase for zone 1
ordinary three-phase tripping all zones
basic scheme logic for stand-alone operation
accelerated underreach scheme (AUP or PUR)
permissive overreach transfer tripping scheme
(POR1 or POTT)
blocking overreach scheme (BOR2)
blocking underreach scheme (BOR1)
permissive underreach transfer tripping scheme
(PUP forward or PUTT)
zone reach control
busbar isolation
none, unblocking, HF acceptance
carrier send transmission in zone 1
carrier send transmission in zone 2
carrier send transmission in reverse zone 5
Tee Line
The teleaction possibilities for the second teleprotection channel of the Tee line are the same as those for the first
channel. Tee-line applications may use two-different schemes.
Weak-infeed and echo
Weak-Infeed and echo configuration
Function locking on power swing
Tripping authorisation
Confirmation by insufficient voltage
If yes, under voltage threshold
Open pole detection threshold
Time-delay for tripping
Blocking time if start-up drop off
Power-swing
Power swing detection boundary
Unblocking timer
First zone independent on power swing
Carrier send blocking on power swing
Carrier receive blocking on power swing
Unblocking on residual current Ir
Unblocking percentage threshold kr
Unblocking on overcurrent Imax
Unblocking threshold Imax
Unblocking on negative sequence current
Unblocking percentage threshold
Tripping mode
Blocking type
yes/no
yes/no
none/1 pole/3 poles
yes/no
0.2 Vn to Vn in steps of 0.1 Vn
0/0.05 In
0 to 1 s in steps of 1 ms
0 to 500 ms in steps of 1 ms
0 to 25 Ω in steps of 0.01 W
0 to 30 s in steps of 100 ms
yes/no
yes/no
yes/no
yes/no
10 to 100% in steps of 1 % of Ir
yes/no
In to 20 In in steps of 0.01 In
yes/no
10 to 100% in steps of 1% of I2
1 pole/3 poles
none
blocking all zones
zone 1 blocking
zones 1 and 2 blocking
zones 1, 2 and 3 blocking
zone 1 unblocking
zones 1 and 2 unblocking
zones 1, 2 and 3 unblocking
A-6
EPAC 3100/3500
Fuse failure and emergency overcurrent protection
I0 and I2 threshold detection
Timer for fuse failure indication
Ifus> threshold unblocking
Ifus> threshold
Tfus> timer
Ifus>> threshold unblocking
Ifus>> threshold
Tfus>> timer
Ifr> threshold unblocking
Ifr> threshold
Tfr> timer
Auto-recloser blocking by fuse failure tripping
MS/M 1.6882-C
0 to In in steps of 0.01 In
1 to 20 s in steps of 1 s
yes/no
0.2 In to 9.99 In in steps of 0.01 In
0 to 10 s in steps of 10 ms
yes/no
0.2 In to 9.99 In in steps of 0.01 In
0 to 10 s in steps of 10 ms
yes/no
0.2 In to 9.99 In in steps of 0.01 In
0 to 10 s in steps of 10 ms
yes/no
Timer for auto-recloser blocking by the distance protection
Timer for auto-recloser blocking
no/to T2/to T3/to T4/to T5/to T>/to T>>
Seal-in
Enabled/disabled
Holding threshold
Auto-recloser
Reclosing mode on 1 pole trip
Reclosing mode on 3 pole trip
Reclosing mode on trip by backup protection
High-speed 1 pole dead time
High-speed 3 pole dead time
Low-speed dead time
Reclaim time
Backup protection reclaim time
Duration of closing command
Check synchronising function
The following types of synchro-check are possible:
none
live line/dead bus
dead line/live bus
live line / live bus
Check synchronism on high-speed
three-phase cycle
Confirmation time for the live-line
and live bus mode
Voltage difference
Frequency difference
Angle difference
UL> (line voltage presence threshold)
UB> (bus voltage presence threshold)
UL< (line voltage absence threshold)
UB< (bus voltage absence threshold)
yes/no
0.1 In to In in steps of 0.1 In
None, 1, 1/3, 1/3/3, 1/3/3/3
None, 3, 3/3, 3/3/3, 3/3/3/3
None, 3, 3/3, 3/3/3, 3/3/3/3
0.1 to 5 s in steps of 0.01 s
0.1·k to 500 s in steps of 0.01 s
0.1·k to 500 s in steps of 0.01 s
where k=1 if no synchro-check
where k=2 if voltage check
where k=4 if synchro-check
0.1 to 500 s in steps of 0.1 s
0.1 to 500 s in steps of 0.1 s
0.1 to 10 s in steps of 10 ms
UL> / UB<
UL< / UB>
UL> / UB>
yes/no
0.2 to 2.0 s in steps of 0.1 s
0.1 Vn to Vn in steps of 0.05 Vn
0.05 to 5 Hz in steps of 0.01 Hz
10° to 70° in steps of 5°
0.5 Vn to Vn in steps of 0.05 Vn
0.5 Vn to Vn in steps of 0.05 Vn
0.1 Vn to 0.4 Vn in steps of 0.05 Vn
0.1 Vn to 0.4 Vn in steps of 0.05 Vn
A-7
MS/M 1.6882-C
EPAC 3100/3500
Switch on-to-fault
Switch on to fault threshold
In to 9.9 In in steps of 0.1 In
Reversal guard extension
Reverse locking extension time-delay
0 to 150 ms in steps of 10 ms
Fault locator
Fault locating unit
Accuracy
in km or in miles,
± 3% of the line length
Disturbance recording
Disturbance recording enabled
Disturbance recording triggered when
analogue thresholds are exceeded
Min and max voltage thresholds
Min and max current thresholds
Min frequency threshold
If freq. = 50 Hz
If freq. = 60 Hz
Pre-time
Post-time
Overload protection
Type of protection
yes/no
yes/no (IA, IB, IC, Ir, UA, UB, UC, UR, F)
0 to 250% Vn in steps of 1% Vn
0 to 7,000% In in steps of 1% Vn
45 £ Fmin
55 £ Fmin
0.1 to 0.5
0.1 to 4.5
£ 50; 50 £ Fmax £ 55
£ 60; 60 £ Fmax £ 65
s in steps of 100 ms
s in steps of 100 ms
Fixed threshold I1
Fixed threshold I2
Fixed threshold I3
Threshold I1 tripping timer
Threshold I2 tripping timer
Threshold I3 tripping timer
Type of inverse curve
Choice of IEC curve
Choice of ANSI curve
Threshold line current
Multiplier factor
none
fixed thresholds
inverse curves
0.5 In to 2 In in steps of 0.01 In
In to 3 In steps of 0.01 In
1.3 In to 3 In in steps of 0.01 In
1 to 100 min in steps of 1 min
1 to 100 min in steps of 1 min
1 to 100 s in steps of 1 s
IEC, ANSI (US)
inverse/very inverse/extremely inverse
moderately inverse/inverse/very inverse/extremely inverse
0.5 In to 2 In in steps of 0.05 In
0 to 3.2 In in steps of 0.01 In
Over and under voltage protection
Minimum voltage threshold
Timer for minimum voltage tripping
Maximum voltage threshold
Timer for maximum voltage alarm
Tripping on maximum voltage
0.1 Vn to 0.6 Vn in steps of 0.1 In
0 to 20 s in steps of 0.1 s
1.1 to 1.4 Vn in steps of 0.1 Vn
0 to 20 s in steps of 0.1 s
yes/no
Resistant earth fault protection
Directional comparison protection
Residual voltage threshold
Residual forward current threshold
Tripping type
Independent teleaction channel
Type of tripping scheme
Transmission time-delay for teleaction
Tee line present
yes/no
0.01 Vn to 0.2 Vn in steps of 0.01 Vn
0.1 In to 4 In in steps of 0.01 In
1 pole/3 poles
yes/no
permissive/blocking
0 to 1 s in steps of 5 ms
yes/no
A-8
EPAC 3100/3500
Type of scheme for tee line
Transmission time-delay for tee line application
Operation timer
Activation of back-up protection
Residual current threshold
Multiplier factor
Type of curve
IEC curve type
ANSI curve type
Coefficient of multiplication P (power)
Auto-recloser of backup protection locked
Isolated neutral protection (Peterson coil)
Network with isolated neutral or impedance
Selection criteria for loop
Residual current threshold
Residual voltage threshold
Tripping on maximum residual voltage
Time-delay for tripping
on maximum residual voltage
Zero sequence active power protection
Zero sequence active power
Secondary current for max. angle error of
current transformer
Angle error of current transformer at I1
Secondary current above which the angle error
is practically constant
Angle error of current transformer at I2
Residual current threshold for the start-up
Angle of the start-up characteristic
K power factor
CT core balance ratio (Kir)
Duration of transient earth fault
Sensitivity of the distance protection function
Current threshold
Directional sensitivity
Accuracy of the distance protection function
For an SIR < 30 and a current
of 0.2 to 30 In (zone 1)
Other zones
Operating Time
Fastest tripping time
Typical operating time
Electro-magnetic compatibility
High frequency disturbance (255-22-1)
Electrostatic discharge (255-22-1)
MS/M 1.6882-C
permissive/blocking
0 to 1 s in steps of 5 ms
0 to 10 s in steps 100 ms
no, power, current
0.1 In to 4 In in steps of 0.01 In
0 to 3.2 in steps of 0.01
IEC, ANSI (US)
inverse/very inverse/extremely inverse
moderately inverse/inverse/very inverse/extremely inverse
1 to 9 in steps of 1
yes/no
yes/no
Acyclic C(A), A(C), B(A), A(B), C(B), B(C)/Cyclic C(A), A(C)
0.2 In to 5 In steps of 0.1 In
0.1 Vn to Vn in steps of 0.05 Vn
yes/no
1 to 360 s in steps of 1 s
yes/no
1 mA to 4 A in steps of 1 mA
–30° à +30° in steps of 1°
1 mA to 4 A in steps of 1 mA
–30° to +30° in steps of 1°
1 mA to 4 A in steps of 1 mA
–180° to +180° in steps of 1°
1 to 10 in steps of 1
1 to 20000 in steps of 1
100 to 500 ms in steps of 10 ms
0.2 In
unlimited for all types of faults
unlimited for 10 s for close faults (memory voltage)
5% of adjusted value
10 % of adjusted value
18 ms
60 Hz: 22 ms
50 Hz: 25 ms
≤ 30 ms for SIR =1
≤ 40 ms fpr SIR = 30
IEC 255-22
2.5 kV peak between independent circuits and case
1.0 kV peak across terminals of the same circuit
8.0 kV point contact discharge with cover removed
15 kV discharge in air with cover in place
A-9
MS/M 1.6882-C
EPAC 3100/3500
Electromagnetic interference (immunity)
Fast transient disturbance
Electromagnetic interference
on logic channel (transmission)
27 MHz - 1000 MHz 10 V/M, 80% modulation at 1 kHz
4.0 kV, 5.0 kHz 1 min. applied to all inputs
Electrical environment
Impulse voltage withstand
Insulation resistance
Dielectric withstand
Protection index
IEC 255-5
5 kV 1.2 / 50 microseconds; 0.5 J
> 100 MW at 500 VDC
2 kV 50 Hz 1 min.
IP52
Atmospheric environment
Operating temperature
Storage temperature
Relative humidity with no condensation
IEC 68-2
–10° to +55°C
–40° to +70°C
93 %
Mechanical environment
Vibration
Shock and bump
Free fall with packing
IEC 255-21
category 1
category 1
2 falls of 0.5 m
NF for 55011 and 55022 Group 1, Class A
Dimensions
EPAC 3100:
- Width
- Height
- Depth
412.50 mm
177 mm
304.30 mm
EPAC 3500:
- Width
- Height
- Depth
483 mm
177 mm
304.30 mm
EPAC 3100/3500:
- Weight of apparatus fitted with all its modules
12 kg
A-10
EPAC 3100/3500
MS/M 1.6882-C
Commissioning report
COMMISSIONING REPORT
EPAC Characteristics
EPAC code
:
Serial number
:
First Licence Word
:
Second Licence Word:
Up-Grade Index
:
:
EPAC Power Supply
In Rated Current :
Vn Rated Voltage :
Frequency
:
Hz
A
V
Auxiliary Supplies
Converter
:
VDC
Inputs/logic :
VDC
Teleprotection Reception :
VDC
A-11
MS/M 1.6882-C
EPAC 3100/3500
LINE HV CHARACTERISTICS
Line rated voltage :
kV
Line load current :
A
Power carried along line :
in normal load carrying mode : Pcn =
maximum load current :
Prc =
MVA
MVA short circuit
Maximum load current
A
Icm =
Ratio of the voltage measuring reducers :
where Unp = reducer primary rated voltage
Uns = reducer secondary rated voltage
Ratio of the current measuring reducers :
where Iap = reducer primary rated current
Ias = reducer secondary rated current
Maximum load current with low voltage :
VTR = Unp / Uns =
CTR = Iap / Ias =
V/
A/
IcLV = Icm / Ki =
Line length
Positive sequence and zero sequence impedance in cartesian coordinates
Ohms
Line zero sequence resistance
Ohms
Line positive sequence reactance
Ohms
Line zero sequence reactance
Ohms
Positive sequence and zero sequence impedance in polar coordinates:
Line positive sequence impedance
Ohms
Line zero sequence impedance
Ohms
Imaginary part of Kox
Ohms
Real part of Kox
Ohms
Actual value of Kor
Degrees
Zero sequence angle
Degrees
Impedance reducer coefficient
Kz = VTR / CTR =
Low voltage impedance Zbt = Zd / Kz =
LV Ohms
Minimum operating impedance Zs = 0.8.Uns / √3.IcLV =
A
A
km or miles
Line positive sequence resistance
V
LV Ohms
A-12
EPAC 3100/3500
MS/M 1.6882-C
CONFIGURATION
PARAMETERS
A-13
MS/M 1.6882-C
EPAC 3100/3500
LINE PARAMETERS
Label on
PC
Nominal Frequency
Line Length
Unit
Adjustment
range
Freq
Hz
50 or 60
Length
km
0,3 to 300
display
Value
Nominal Voltage
Un
Vrms
100 to 120
Nominal Current
In
A
1 or 5
Voltage Ratio
Ku
1 to 20 000
Current Ratio
Ki
1 to 20 000
Cartesian Z0 and Zd
R1 positive sequence resistance
X1 positive sequence reactance
R01 zero sequence resistance
X01 zero sequence reactance
R02 zero sequence resistance
X02 zero sequence resistance
Rd
Xd
R01
X01
R02
X02
LV ohms
LV ohms
LV ohms
LV ohms
LV ohms
LV ohms
0.001 to 999
0.001 to 999
0.001 to 999
-999 to 999
0.001 to 999
-999 to 999
Polar Z0 and Zd
Z1 positive sequence impedance
Z01 zero sequence impedance
Z02 zero sequence impedance
Argument of Z1
Argument of Z01
Argument of Z02
LV ohms
LV ohms
LV ohms
degrees
degrees
degrees
0.001 to 999
0.001 to 999
0.001 to 999
0 to +90
-90 to +90
-90 to +90
LV ohms
LV ohms
0.001 to 999
0.001 to 999
-7 to 7
-7 to 7
-7 to 7
-7 to 7
X0d, Rd, K0x and K0r
R1 positive sequence resistance
X1 positive sequence reactance
K01r real of K01
K01x imaginary of K01
K02r real of K02
K02x imaginary of K02
Only cartesian values can be modified from the front panel
display.
A-14
EPAC 3100/3500
MS/M 1.6882-C
MONITORING PARAMETERS
Label on
PC
display
Value
Unit
Adjustement
range
Zone 1 impedance
Z1
LV ohms
Extend zone 1 impedance
Z1e
LV ohms
Zone 2 impedance
Z2
LV ohms If In = 1A: 0.1 to 200
Zone 3 impedance
Z3
LV ohms If In = 5A: 0.02 to 40
Zone 4 impedance
Z4
LV ohms
Zone 5 impedance
Z5
LV ohms
Zone 3 Direction
DiZ3
Forwards / Backwards
Step 1 time-delay
T1
ms
0 to 10 000
Step 2 time-delay
T2
ms
0 to 10 000
Step 3 time-delay
T3
ms
0 to 10 000
Step 4 time-delay
T4
ms
0 to 10 000
Step 5 time-delay
T5
I>> time delay (T>>)
T7
ms
0 to 10 000
I> time delay (T>)
T6
ms
0 to 10 000
Phase-earth resist. zone 1
R1m
LV ohms
Phase-phase resist. zone 1
R1b
LV ohms
Limit resistance for zone 2
R2
LV ohms
If In = 1A: 0 to 200
Limit resistance for zone 3
R3
LV ohms
If In = 5A: 0 to 40
Limit resist. for other zone
Rmr
LV ohms
I>> threshold activated
AI>>
yes/no
I>> threshold value
I>>
In
I>> threshold direction
DI>>
I> threshold activated
AI>
I> threshold value
I>
I> threshold direction
DI>
ms
0 to 10 000
0.2 to 9.99
None / Forwards /
Backwards
yes/no
In
0.2 to 9.99
None / Forwards /
Backwards
A-15
MS/M 1.6882-C
EPAC 3100/3500
TELEPROTECTION PARAMETERS
Label on
PC
display
Value
Adjustment range
Tripping type
Dec
Three pole trip for all zones
Single pole trip for zone 1
Single pole trip for zones 1 & 2
Distance protection scheme
Type
No signal scheme
Permissive underreach mode
Permissive overreach mode
Accelerated underreach mode
Blocking overreach mode
Blocking underreach mode
Zone reach control
Redu
YES or NO
Busbar isolation
DebB
YES or NO
If no teleaction :
If teleaction = permissive
overreach or accelerated
HF acceptance or unlocking
Ph
None/Unblocking/HF presence
If teleaction = blocking
Emission type
Emis
Zone 1, 2 or 5
Transmission time delay
Temi
0 to 1000 ms
A-16
EPAC 3100/3500
MS/M 1.6882-C
TEE LINE PARAMETERS
Label on
PC
display
Tee line application
Acti
Distance protection scheme
Type
Value
Adjustment
range
YES/NO
No signal scheme
Permissive underreach mode
Permissive overreach mode
Accelerated underreach mode
Blocking overreach mode
Blocking underreach mode
If teleaction = permissive
overreach or accelerated
HF acceptance or unlocking
HFPh
None/Unblocking/HF presence
Emission type
Emia
Zone 1, 2 or 5
Transmission time delay
Tema
0 to 1000 ms
If teleaction = blocking
A-17
MS/M 1.6882-C
EPAC 3100/3500
WEAK INFEED PARAMETERS
Label on
PC
display
Value
Unit
Weak infeed activation Acti
Adjustment range
YES / NO
Blocking on Power swing
Verp
YES / NO
Trip mode
Dec
none
1 pole
3 pole
Open pole
detection threshold
Smcw
A
0 to 0,05 In
Tripping time delay
Tdec
ms
0 to 1 000
Blocking timeif start up drop off
Tver
ms
0 to 500
If single phase tripping
authorized :
Confirmation by
under voltage
ConU
Under voltage threshold
Smtw
YES / NO
V
0.2 Vn to Vn
A-18
EPAC 3100/3500
MS/M 1.6882-C
MISCELLANEOUS PARAMETERS
Label on
PC
I
Trip Seal-in on presence of
line current
display
Value
Unit
Adjustment
range
Seal
s
YES / NO
Seal-in threshold
Isea
In
0.1 to 1
Delayed auto-recloser
blocking mode
Venc
Reclose threshold on fault
Ienc
In
1 to 9.9
Reverse guard timer
Rvg
ms
0 to 150
If YES :
No
at T>>
at T>
at T5
at T4
at T3
at T2
A-19
MS/M 1.6882-C
EPAC 3100/3500
FUSE FAILURE PARAMETERS
Label on
PC
Display
Value
Unit
Adjustment
Range
I0 and Ii threshold detection
Sffi
In
0,1 to 1
Fuse failure alarm time delay
Tffs
s
1 to 20
Ifus> threshold activation
Ifus>threshold value
AI>
If>
In
YES/NO
0,2 to 9,99
Tfus> time delay
Tf>
ms
0 to 10 000
Ifus>> threshold activation
AI>>
Ifus>> threshold value
Tfus>> time delay
If>>
Tf>>
Ir threshold activation
Ifr threshold value
Tfr time delay
Auto recloser blocking
thresholds Ifus> or Ifus>> or
Ifr>
YES/NO
In
ms
0,2 to 9,99
0 to 10 000
AIr
Ir
In
YES/NO
0,2 to 9,99
TIr
ms
0 to 10 000
Verf
YES/NO
A-20
EPAC 3100/3500
MS/M 1.6882-C
POWER SWING PARAMETERS
Label on
PC
display
Value
Unit
Power swing detection
boundary
Bdpm
Blocking type
Tver
Z1/Z2/Z3 unlock
Z1/Z2 unlock
Z1 unlock
Z1/Z2/Z3 lock
Z1/Z2 lock
Z1 lock
lock all zones
no lock
Independent 1st zone
on Power swing
Z1in
Yes / No
Carrier send blocking
Vrem
Yes / No
Carrier receive blocking
vert
Yes / No
Unlocking time-delay
on Power swing (x 0.1 sec.)
tdor
Unblocking on current
Ir threshold
Scir
Ir threshold ratio
Ir %
Unblocking on Imax
Scim
Imax Unblocking threshold
Imax
Unblocking on current
Ii threshold
Sci
Unblocking Ii threshold
ratio ki
Tripping mode
Ii%
Dec
LV ohms
Adjustment
range
secs.
0 to 25
0 to 300
Yes / No
%
10 to 100
Yes / No
In
In to 20 In
Yes / No Ye
%
10 to 100
1 pole / 3 poles
A-21
MS/M 1.6882-C
EPAC 3100/3500
RESISTIVE EARTH FAULT PARAMETERS
Label on
PC
display
Value
Unit
Adjustment range
Directional comparison
Acti
YES / NO
Residual voltage threshold
Vrd
Vn
0,01 to 0,2
Residual forward
current threshold
Ied
In
0.1 to 4
Tripping type
Dec
Operation time
Tfon
Single-/Three-phase
ms
0 to 10 000
Independent teleprotection
channel
Cane
YES / NO
Tripping scheme
Type
blocking permissive
Tee line application
Typi
YES / NO
If blocking :
Teleprotection time delay
Tee line teleprotection
time delay
Back-up relay activation
Trande
ms
0 to 1000
Traide
ms
0 to 1000
Acti
No/Current/
Power
0.1 to 4
0 to 3.2
ANSI/IEC
Residual current threshold
Multiplier coefficient
Standard
If ANSI
Curve type
Ie
TyCb
If IEC
Curve type
inverse
moderately inverse
extremely inverse
very inverse
TyCb
If back-up = power :
Residual current threshold
Multiplier factor I
Multiplier factor P
inverse
very inverse
extremely inverse
Ie
CoeI
CoeP
In
0.1 to 4
1 to 9
1 to 9
A-22
EPAC 3100/3500
MS/M 1.6882-C
AUTO RECLOSER PARAMETERS
Label on
PC
display
Value
Unit
Adjustment
range
Single pole recl.
1st dead time
Term
s
0.1 to 5
Three pole recl.
1st dead time
Tcrt
s
0.1 x k(*) to 500
Other dead time
Tclt
s
0.1 x k(*) to 500
Reclosing signal time
Tenc
s
0.1 to 10
Reclaim time
Tbloc
s
0.1 to 500
Delayed reclaim time
Tbps
s
0.1 to 500
Reclosing mode
on single pole tripping
Mono
None
1
1/3
1/3/3
1/3/3/3
Reclosing mode on
three pole tripping
Tri
None
3
3/3
3/3/3
3/3/3/3
Reclosing mode on
backup tripping
Mrps
None
3
3/3
3/3/3
3/3/3/3
(*)
k depends on synchro-check type:
k=1 if synchro-check is not used
k=2 for live busbar/dead line or dead busbar/live line
k=4 for live busbar/live line or live busbar/dead line or dead busbar/live line
A-23
MS/M 1.6882-C
EPAC 3100/3500
SYNCHRO-CHECK PARAMETERS
Label on
PC
Synchro-check scheme
display
Value
Unit
Type
Adjustment range
None
Live busbar dead line
Dead busbar live line
Live busbar live line
All
Phase selected for voltage
Tlin
Phase A, B or C
Synchrocheck on quick
three phase
Cutr
Yes / No
Dead Busbar threshold
Vab
% Vn
10 to 40
Live line threshold
Vpl
% Vn
50 to 100
Dead Line threshold
Val
% Vn
10 to 40
Dead Busbar threshold
Vpb
% Vn
50 to 100
(Uline-U busbar) threshold
Evec
% Vn
10 to 100
(Fline-F busbar) threshold
Efre
Hz
0.1 to 5
(PHline-PH busbar) threshold
Epha
Degrees
10 to 70
Live busbar/live line delay
Tbou
s
0.2 to 2
A-24
EPAC 3100/3500
MS/M 1.6882-C
ISOLATED NETWORK PARAMETERS
Label on
PC
Isolated or compensated
network
Phase selection
criterion
display
Value
Unit
Acti
Adjustment
range
YES / NO
Type
Acyclic B (C)
Acyclic C (B)
Acyclic B (A)
Acyclic A (B)
Acyclic C (A)
Acyclic A (C)
Cyclic C (A)
Cyclic A (C)
Residual current threshold
Slr2
In
0.2 to 5
Residual voltage threshold
Str
Vn
0.1 to 1
Tripping on maximum
of residual voltage
Dec
Tripping time-delay
Temp
s
1 to 360
Permanent fault signal
Tdsp
s
0.1 to 360
YES / NO
A-25
MS/M 1.6882-C
EPAC 3100/3500
SENSITIVE DIRECTIONAL EARTH FAULT PARAMETERS
PC
Label on
Sensitive Directional Earth
Fault detection
I1threshold
Display
Value
Unit
APWH
Adjustment
Range
YES/NO
I1
mA
1 to 4000
DI1
degree
-30 to + 30
I2
mA
1 to 4000
Phase angle at I2
DI2
degree
-30 to + 30
Residual current threshold
SIr
mA
1 to 4000
Power characterics angle
DpIr
degree
-180 to +180
Power ratio K
KpIr
Ir
1 to 10
CT Core ratio
KIr
Ir
1 to 20 000
Pdfr
ms
100 to 200
Phase angle at I1
I2 threshold
Auto-start fault period
A-26
EPAC 3100/3500
MS/M 1.6882-C
MaxI - MinU - MaxU PARAMETERS
Label on
PC
Relays activation
display
Value
Unit
Acti
None
Min U & Max U
Min U
Max U
If Min U
Min U threshold
Min U Tripping time-delay
Adjustment
range
Vbas
TmnU
Un
s
0.1 Un to 0,6
0 to 20
Vhau
DmxU
TmxU
Un
1.1 to 1,4
Yes / No
0 to 20
If Max U
Max U threshold
Max U tripping
Max U time delay
s
If MAX I
Overload relay
Acti
None
Fixed thresholds
Inverses curves
If fixed thresholds
I1
I2
I3
I1
I2
I3
fixed threshold
fixed threshold
fixed threshold
treshold trip. time delay
treshold trip. time delay
treshold trip. time delay
I1
I2
I3
Tpl1
Tpl2
Tpl3
In
In
In
mn
mn
s
0.5 to 2
1 to 3
1.3 to 3
1 to 100
1 to 100
1 to 100
If inverses curves
Standard
Tyno
ANSI/IEC
ANSI curve selection
TypU
Multiplier coefficient
Current threshold
line threshold
Tm
Is
In
Inverse
Moderately inverse
Extremely inverse
Very inverse
0 to 3.2
0.5 to 2
Tm
In
Inverse
Very inverse
Extremely inverse
0 to 3.2
0.5In to 2
If ANSI
If IEC
IEC curve selection
Multiplier coefficient
Current threshold
TypC
Is
A-27
MS/M 1.6882-C
EPAC 3100/3500
DISTURBANCE RECORDING PARAMETRES
Label on
PC
display
Adjustments
range
fault
Value
Commissioning TPE
Disturbance recorder
YES/NO
Pre-time (x 0,1 s)
ms
100 to 500
Post-time (x 0,1 s)
ms
100 to 4500
Tripping by analog
thresholds
UA
UB
UC
UR
IA
IB
IC
IR
YES/NO
Min. thresholds (% Vn)
UA
UB
UC
UR Max. thresholds (% Vn)
IA
IB
IC
IR
}
}
}
}
%V
0 to 250
%In
0 to 7000
%Vn
0 to 250
%In
0 to 7000
Frequency - min. threshold
Hz
45 to 60
Frequency - max. threshold
Hz
50 to 75
A threshold set to its minimum or maximum value is not
taken into account.
A-28
EPAC 3100/3500
MS/M 1.6882-C
Fault Codes
Types of Board Fault
Hexadecimal Code
Faulty Board
0
None
1
CPU-TMS
2
IO-1
4
IO-2 or IO-1supp or IO-3supp
8
additional IO-1
10
AFF
20
COMM
40
AC
80
IRIG-B
Fault Level
Hexadecimal Code
Failure
1
detected when the EPAC is initialized
2
detected during operation
4
major; causing the EPAC to shut down
8
minor; causing operation in a down-graded mode
10
repetitive
Type 1 Fault
Bit
Value
Meaning
0
1h
PROM self-test error
1
2h
RAM self-test error
2
4h
RAM addressing self-test error
3
8h
EEPROM self-test error
4
10h
DEC relay self-test error
5
20h
DO relay self-test error
6
40h
End of init. self-tests
7
80h
Error of acq. control word
8
100h
Write EEPROM error
9
200h
Offset computation error
10
400h
PFIN error
11
800h
12 V absence or eqpt. fault on trip (*)
12
1000h
INTERNAL TIMER expires
13
2000h
Read code overflow
14
4000h
IO-1 board IT
15
8000h
IT not found in IT table
A-29
MS/M 1.6882-C
EPAC 3100/3500
Type 2 Fault
Bit
Value
Meaning
0
1h
Context save overflow
1
2h
Time-delay overflow
2
4h
WDOG IT occurs
3
8h
+/- 10 V fault
4
10h
Frequency slaving fault
5
20h
Reference voltage fault
6
40h
16 IA channel failure (*)
7
80h
16 IB channel failure (*)
8
100h
16 IC channel failure (*)
9
200h
WATCHDOG self-test error
10
400h
TIMER 1 self-test error
11
800h
No configuration in EEPROM
12
1000h
Configuration in EEPROM not valid
13
2000h
TIMER2 self-test error
14
4000h
IT1 self-test error
15
8000h
IT2 self-test error
Type 3 Fault (EPAC with option AC board)
Bit
Value
Meaning
0
1h
RAM read/write error board AC
(1=main, 2=backup, 3=double access)
1
2h
CHECKSUM error board AC
(1=PROM, 2=EEPROM)
2
4h
UART error board AC
(1=UART1 channel 0, 2=UART1 channel 1,
3 =UART2 channel 0, 4=UART2 channel 1)
3
8h
TIMER error board AC
4
10h
DATER error board AC
(1=DATER, 2=DATER RAM)
5
20h
WATCHDOG error board AC
6
40h
SOFTWARE error board AC
7
80h
8
100h
CONF1 AC/EP not coherent
9
200h
CONF2 AC/EP not coherent
10
400h
CONF3 AC/EP not coherent
A-30
EPAC 3100/3500
MS/M 1.6882-C
11
800h
CONF4 AC/EP not coherent
12
1000h
13
2000h
14
4000h
AC board not connected
15
8000h
AC and TMS dialog problem
Type 4 Fault (EPAC with AC board option)
Bit
Value
Meaning
0
1h
PROM page 2 error
1
2h
Wrong version between code and EEPROM
2
4h
Self test problem in the IR input
3
8h
IRIG-B board out of service
4
10h
IRIG-B frame reception error
5
20h
6
40h
7
80h
8
100h
9
200h
10
400h
11
800h
12
1000h
13
2000h
14
4000h
15
8000h
Type 5 Fault
Not used.
A-31
MS/M 1.6882-C
EPAC 3100/3500
Analogue input connections
Tore
P2
S2
P1
IL1
S1
P2
S2
P1
IL2
S1
P2
S2
IL3
P1
S1
UL1
P1 P2
UL2
P1 P2
UL3
P1 P2
To BCH
S1
ILE1
ILS1 ILE2
ILS2 ILE3
ILS3
INS
INE
UL1
S2 S1
UN
S2 S1
UL2
S2
UL3
UbarreE
UbarreS ITMHE ITMHS
X5
Connector
IL1
P2
S2
IL2
IL3
IN
UL1
UL2
UBAR
UL3
TMH
P1
IL1
S1
P2
S2
P1
IL2
S1
P2
S2
IL3
P1
S1
UL1
P1 P2
S1
ILE1
ILS1 ILE2
ILS2 ILE3
ILS3
INS
INE
UL1
S2 S1
UN
UL2
P1 P2
S2 S1
UL2
UL3
P1 P2
S2
UL3
To BCH
UbarreE
UbarreS ITMHE ITMHS
X5
Connector
IL1
IL2
IL3
IN
UL1
UL2
UL3
UBAR
TMH
A-32
EPAC 3100/3500
MS/M 1.6882-C
Rear view (IRIG-B, Modem and KBUS-COURIER options)
X6
1
2
X1
X3
27
1
27
1
28
2
28
2
27
1
27
1
28
2
28
2
X2
X4
D26
X5
27
28
27
1
28
2
X6
X1
X3
X2
X4
X30
X5
X20
EPAC 3100/3500
TMH S
TMH E
U BarS
bar
U BarE
2
4
UL2
UL3
UN
UL1
6
8
10
12
16
INE
INS
INE
INS
18
IL E3
IL S3
If IN = 5A
20
IL E3
IL S3
If IN = 1A
22
IL E2
IL S2
If IN = 5A
24
26
IL
IL
IL
IL
28
IL E1
IL S1
14
If IN = 5A
If IN = 1A
E2
S2
E1
S1
E: Input
S: Output
If IN = 1A
If IN = 5A
If IN = 1A
X5
QTF Board
Screw-in
connector
The equipment fault signal wires are connected to pins 9
and 10 of the X6 terminal block on the main IO Board (IO1 or IO-3) and to pins 15 and 16 of the X6 terminal block
on the additional IO Board (IO-1 or IO-3or IO-2).
27
28
- Power Supply
+ Power Supply
X6 Connector
A-33
MS/M 1.6882-C
EPAC 3100/3500
Input/Output Contact Connections
CONFIGURABLE
SIGNALLING
CONFIGURABLE
EPAC 3100/3500
CONTACTS (TC)
SIGNALLING
CONTACTS (TC)
2
TC 15
TC 01
2
4
TC 16
TC 02
4
6
Phase A tripping
TC 03
6
8
Phase B tripping
TC 04
8
10
Phase C tripping
TC 05
10
12
Closing by recloser
TC 06
12
14
TS 01
TC 07
14
16
TS 02
TC 08
16
18
TS 03
TC 09
18
20
TS 04
TC 10
20
22
TS 05
TC 11
22
24
TS 06
TC 12
24
26
TS 07
TC 13
26
28
TS 08
TC 14
28
CONFIGURABLE
LOGIC INPUTS (TS)
X1
Screw-in
Connector
IO-1 BOARD
X2
Screw-in
Connector
A-34
EPAC 3100/3500
MS/M 1.6882-C
CONFIGURABLE
SIGNALLING
CONFIGURABLE
EPAC 3100/3500
CONTACTS (TC)
SIGNALLING
CONTACTS (TC)
2
Phase B tripping
TC 01
2
4
Phase C tripping
TC 02
4
6
Phase A tripping
TC 03
6
8
Phase B tripping
TC 04
8
10
Phase C tripping
TC 05
10
12
Closing by recloser
TC 06
12
14
TS 01
TC 07
14
16
TS 02
TC 08
16
18
TS 03
TC 09
18
20
TS 04
TC 10
20
22
TS 05
TC 11
22
24
TS 06
TC 12
24
26
TS 07
TC 13
26
28
TS 08
Phase A tripping
28
CONFIGURABLE
LOGIC INPUTS (TS)
X1
Screw-in
Connector
IO-3 BOARD
X2
Screw-in
Connector
A-35
MS/M 1.6882-C
EPAC 3100/3500
CONFIGURABLE
SIGNALLING
EPAC 3100/3500
CONFIGURABLE
SIGNALLING
CONTACTS (TC)
CONTACTS (TC)
2
TC 15
TC 01
2
4
TC 16
TC 02
4
6
Phase A tripping
TC 03
6
8
Phase B tripping
TC 04
8
10
Phase C tripping
TC 05
10
12
Closing by recloser
TC 06
12
14
TS 01
TC 07
14
16
TS 02
TC 08
16
18
TS 03
TC 09
18
20
TS 04
TC 10
20
22
TS 05
TC 11
22
24
TS 06
TC 12
24
26
TS 07
TC 13
26
28
TS 08
TC 14
28
CONFIGURABLE
LOGIC INPUTS (TS)
X3
Screw-in
Connector
Additional IO-1 BOARD
X4
Screw-in
Connector
A-36
EPAC 3100/3500
MS/M 1.6882-C
CONFIGURABLE
CONFIGURABLE
EPAC 3100/3500
SIGNALLING
CONTACTS (TC)
SIGNALLING
CONTACTS (TC)
2
Phase B tripping
TC 01
2
4
Phase C tripping
TC 02
4
6
Phase A tripping
TC 03
6
8
Phase B tripping
TC 04
8
10
Phase C tripping
TC 05
10
12
Closing by recloser
TC 06
12
14
TS 01
TC 07
14
16
TS 02
TC 08
16
18
TS 03
TC 09
18
20
TS 04
TC 10
20
22
TS 05
TC 11
22
24
TS 06
TC 12
24
26
TS 07
TC 13
26
28
TS 08
Phase A tripping
28
CONFIGURABLE
LOGIC INPUTS (TS)
X3
Screw-in
Connector
Additional IO-3 BOARD
X4
Screw-in
Connector
A-37
MS/M 1.6882-C
EPAC 3100/3500
CONFIGURABLE
EPAC 3100/3500
SIGNALLING
CONFIGURABLE
SIGNALLING
CONTACTS (TC)
CONTACTS (TC)
2
TC 15
TC 01
2
4
TC 16
TC 02
4
6
Phase A tripping
TC 03
6
8
Phase B tripping
TC 04
8
10
Phase C tripping
TC 05
10
12
Closing by Recloser
TC 06
12
14
TC 07
14
16
TC 08
16
18
TC 09
18
20
TC 10
20
22
TC 11
22
24
TC 12
24
26
TC 13
26
28
TC 14
28
X3
Screw-in
Connector
IO-2 BOARD
X4
Screw-in
Connector
A-38
EPAC 3100/3500
MS/M 1.6882-C
Zone 1 50 Hz operating curves for HV and EHV networks
Phase to neutral faults
HV network with VT
EHV network with CVT
40
Operating
Time
(ms)
35
Operating
Time
(ms)
40
35
30
SIR=30 (typ)
SIR=30 (max)
30
25
SIR=1 (typ)
SIR=1 (min)
25
20
20
15
15
0
10
20
30
40
50
60
70
80
0
10
20
Reach (%)
30
40
50
60
70
80
Reach (%)
Phase to phase faults
HV network with VT
EHV network with CVT
40
Operating
Time
(ms)
Operating
Time
(ms)
35
40
35
30
SIR=30 (typ)
SIR=30 (max)
30
25
SIR=1 (typ)
SIR=1 (min)
25
20
20
15
15
0
10
20
30
40
Reach (%)
50
60
70
80
0
10
20
30
40
Reach (%)
50
60
70
80
A-39
MS/M 1.6882-C
EPAC 3100/3500
Zone 1 50 Hz operating curves for HV and EHV networks
Phase-phase-neutral faults
HV network with VT
EHV network with CVT
Operating 40
Time
(ms)
35
Operating
Time
(ms)
45
40
35
30
SIR=30 (typ)
SIR=30 (max)
30
25
SIR=1 (typ)
SIR=1 (min)
25
20
20
15
15
0
10
20
30
40
50
60
70
80
10
20
30
Reach (%)
40
50
60
70
80
Reach (%)
3-phase faults
HV network with VT
EHV network with CVT
40
Operating
Time
(ms)
Operating
Time
(ms)
35
SIR=30 (typ)
SIR=30 (max)
30
SIR=1 (typ)
SIR=1 (min)
25
45
40
35
30
25
20
20
15
0
10
20
30
40
Reach (%)
50
60
70
80
15
10
20
30
40
Reach (%)
50
60
70
80
A-40
EPAC 3100/3500
MS/M 1.6882-C
Curves
Standard Inverse
IEC Curves
1000,00
Curve equation:
0.14
⋅ TM
I / I 0.02 − 1
E
( )
Operating time (s)
100,00
I= earth fault current
IE=set earth fault pick-up
TM=1
TM=2
10,00
TM=3,2
1,00
0,10
1
10
Ir/threshold
100
A-41
MS/M 1.6882-C
EPAC 3100/3500
Very inverse
IEC Curves
1000
Curve equation:
13.5
⋅ TM
I / IE − 1
( )
100
Operating time (s)
I= earth fault current
IE=set earth fault pick-up
TM=1
10
TM=2
TM=3,2
1
0,1
1
10
Ir/threshold
100
A-42
EPAC 3100/3500
MS/M 1.6882-C
Extremely Inverse
IEC Curves
1000
Curve equation:
80
⋅ TM
I / I 2 − 1
E
( )
100
Operating time (s)
I= earth fault current
IE=set earth fault pick-up
TM=1
TM=2
10
TM=3,2
1
0,1
1
10
Ir/threshold
100
A-43
MS/M 1.6882-C
EPAC 3100/3500
Standard Inverse
ANSI Curves
1000,00
Curve equation:
5.95
0.18 +
⋅ TM
2
/
1
−
I
I
E
( )
100,00
Operating time (s)
I= earth fault current
IE=set earth fault pick-up
TM=1
10,00
TM=2
TM=3.2
1,00
0,10
1,00
10,00
Ir/threshold
100,00
A-44
EPAC 3100/3500
MS/M 1.6882-C
Very Inverse
ANSI Curves
1000,00
Curve equation:
19.61
0.491+
⋅ TM
2
I / IE − 1
( )
100,00
Operating time (s)
I= earth fault current
IE=set earth fault pick-up
TM=1
10,00
TM=2
TM=3.2
1,00
0,10
1,00
10,00
Ir/threshold
100,00
A-45
MS/M 1.6882-C
EPAC 3100/3500
Extremely Inverse
ANSI Curves
1000,00
Curve equation:
28.2
0.1217 +
⋅ TM
2
I / IE − 1
( )
100,00
Operating time (s)
I= earth fault current
IE=set earth fault pick-up
TM=1
10,00
TM=2
TM=3.2
1,00
0,10
1,00
10,00
Ir/threshold
100,00
A-46
EPAC 3100/3500
MS/M 1.6882-C
Moderately Inverse
ANSI Curves
1000,00
Curve equation:
0.0515
0.1114 +
⋅ TM
0.02
/
1
−
I
I
E
( )
100,00
Operating time (s)
I= earth fault current
IE=set earth fault pick-up
TM=1
10,00
TM=2
TM=3.2
1,00
0,10
1,00
10,00
Ir/threshold
100,00
A-47
MS/M 1.6882-C
EPAC 3100/3500
Out line
EPAC 3100
304,3
412,50
177,0
A-48
EPAC 3100/3500
MS/M 1.6882-C
EPAC 3500
304,3
483,0
88,9
177,0
57,1
15,5
A-49
MS/M 1.6882-C
EPAC 3100/3500
Digital Inputs/Outputs
Digital Inputs assignable to contacts of IO-1 or additional IO-1 board(s)
Label on
display
Label on WinEPAC MMI
WinEPAC
screen
Disturbance recording
N° (*)
TPE label
Ffus
LINE FUSE FAILURE
TS1
53
IN.FUSE.FAILURE
End
MANUAL RECLOSING
TS1
54
CLOSING SIGNAL
Rece
CARRIER RECEIVE
TS1
55
CARRIER RECEIVED
Recp
CARRIER RECEIVE FOR TEE LINE
TS1
60
TEE.LN.CAR.REC
Vprt
BLOCKING PROTECTION
TS1
56
PROTECT.LOCK
Bant
THREE PHASE TRIP
TS1
57
IN.GENE.3P.TRIP
phde
HF PRESENT/UNBLOCK
TS1
58
HF/UNLOCK.REC.
phdp
HF PRESENT TEE/UNBLOCK
TS1
59
TEE.HF/UNLO.REC
Redu
ZONE REDUCTION
TS1
77
ZONE REACH
cfg0
SETTING SWITCHOVER BIT 0
TS1
61
SWITCH BIT0 REC.
cfg1
SETTING SWITCHOVER BIT 1
TS1
62
SWITCH BIT1 REC.
Rede
SIGNAL RECEIVE D.E.F.
TS1
63
DEF.CARRIER.REC.
Redp
SIGNAL RECEIVE D.E.F. TEE LINE
TS1
64
TEE.DEF.CAR.REC
Pert
DISTURBANCE RECORDER STARTING
TS1
72
DISTURB.RECORD
deca
PHASE A TRIPPING
TS2
73
A TRIPPING ARC
decb
PHASE B TRIPPING
TS2
74
B TRIPPING ARC
decc
PHASE C TRIPPING
TS2
75
C TRIPPING ARC
DePS
BACKUP PROTECTION TRIPPING
TS2
76
TRIPPING BR
barc
AUTO-RECLOSER LOW PRESSURE
TS2
65
ARC INSUF.PRESSU
iarc
RECLOSING IMPOSSIBLE
TS2
66
ARC IMPOSSIBLE
arcn
AUTO-RECLOSER ENABLED
TS2
67
ARC.ON.REC.
arcf
AUTO-RECLOSER DISABLED
TS2
68
ARC.OFF.REC.
cymn
1 PHASE CYCLE AUTO-RECLOSE
TS2
69
ARC SINGLE CYCLE
fusb
BUSBAR FUSE FAILURE
TS2
70
BAR.VT.FUS.FAIL.
disc
POLES DISCREPENCY
TS2
71
POLE DISCREP.
disj
CB CLOSED
TS2
78
CB CLOSED
(*) WinTPE and COURIER MMI's assign a number to each disturbance digital signal sent by the EPAC.
A-50
EPAC 3100/3500
MS/M 1.6882-C
For instance, if digital inputs "carrier receive" (N° 55), "1 phase cycle auto-reclose" (N° 69) and digital
outputs "carrier send" (N° 23), "Power swing detection" (N° 17) are set to start the disturbance recorder,
they are sorted according to their number and, thus, have the following labels :
Input/output
WinTPE label
COURIER label
CARRIER RECEIVE
LOGN03: RECEP. TELEACT.
DIGITAL_GRP1_03
1 PHASE CYCLE AUTO-RECLOSE
LOGN04: TS CYCLE MONO
DIGITAL_GRP1_04
CARRIER SEND
LOGN02: EMIS. TELEACT
DIGITAL_GRP1_02
POWER SWING DETECTION
LOGN01: DETECT. POMPAGE
DIGITAL_GRP1_01
Digital Outputs assignable to contacts of IO-1 or IO-3, IO-2 or additional IO-1 or IO-3 board(s)
Label
Label on WinEPAC MMI
on
display
WinEPAC
screen
Disturbance recording
N° (*)
TPE label
DecA
PHASE A TRIPPING
TC1
4
A TRIPPING
DecB
PHASE B TRIPPING
TC1
5
B TRIPPING
DecC
PHASE C TRIPPING
TC1
6
C TRIPPING
DecM
SINGLE POLE TRIP
TC1
7
SINGLE POLE TRIP
Dec3
THREE-PHASE TRIP
TC4
52
THREE POLES TRIP
SelA
PHASE A SELECTION
TC1
8
A SELECTION
SelB
PHASE B SELECTION
TC1
9
B SELECTION
SelC
PHASE C SELECTION
TC1
10
C SELECTION
Aval
FORWARD DIRECTIONAL
TC1
18
FORWARD FAULT
Amo
REVERSE DIRECTIONAL
TC1
19
REVERSE FAULT
Z1
ZONE 1 FAULT
TC1
11
ZONE 1
Z2
ZONE 2 FAULT
TC1
12
ZONE 2
Z3
ZONE 3 FAULT
TC1
13
ZONE 3
Z4
ZONE 4 FAULT
TC1
14
ZONE 4
Z5
ZONE 5 FAULT
TC1
15
ZONE 5
Mro
STARTING
TC1
16
START-UP
Poly
MULTI PHASE FAULT
TC2
26
MULTI-PHA FAULT
Mono
SINGLE PHASE FAULT
TC2
27
SINGL-PHA FAULT
Tele
CARRIER SEND
TC2
23
CARRIER SENT
Telp
CARRIER SEND FOR TEE LINE
TC2
24
TEE.LN.CAR.SENT
Auto
SELF TEST IN PROGRESS
TC2
1
SELF-TEST
Alur
URGENT ALARM
TC2
2
URGENT ALARM
Alnu
NON URGENT ALARM
TC2
3
NON-URG. ALARM
Ffus
FUSE FAILURE
TC2
20
FUSE FAILURE
A-51
MS/M 1.6882-C
EPAC 3100/3500
DecF
FUSE FAILURE TRIP
TC4
50
FUSE FAIL.TRIP
Varc
AUTO-RECLOSER BLOCKING
TC2
21
RECLOS. LOCKING
Dver
UNBLOCKING SIGNAL TRANSMISSION
TC2
22
UNLOCK SENT
Dvep
UNBLOCKING SIGNAL TRANSMISSION FOR TEE LINE
TC2
25
TEE.LN.UNLOC.SE
cfg0
SWITCHOVER BIT 0
TC2
28
RE.SWITCH BIT 0
cfg1
SWITCHOVER BIT 1
TC2
29
RE.SWITCH BIT 1
Dpom
POWER SWING DETECTION
TC2
17
PWR.SWING DET.
Tede
DIRECTIONAL COMPARISON SIGNAL
TC2
30
DEF.CARRIER.SE
Tedp
DIRECTIONAL COMPARISON SIGNAL FOR TEE LINE
TC3
31
TEE.DEF.CAR.SE
ddef
D.E.F. TRIP
TC3
32
PH.TO GR.FAULT
Dwea
WEAK-INFEED TRIP
TC3
33
WEAK-INFEE TRIP
auts
AUTO-RECLOSE ENABLE BY SYNCHROCHECK
TC3
36
AUTHOR.FROM.SC
blar
RECLAIM TIME IN PROGRESS
TC3
34
ARC BLOCKING
BArS
BACKUP AUTO-RECLOSER BLOCKING
TC3
35
ARC BLOCKING BR
cmon
1 POLE RECLOSING CYCLE IN PROGRESS
TC3
37
ARC SINGLE CYCLE
ctri
3 POLE RECLOSING CYCLE IN PROGRESS
TC3
38
ARC THREE CYCLE
bant
ALWAYS TRIP 3-PHASE
TC3
39
GENERAL.3P.TRIP
enc
RECLOSING SIGNAL
TC3
40
RECLOSING ORDER
defs
VOLTAGE FAULT BY SYNCHROCHECK
TC3
41
FAULT.VOLT.SC
amnu
MIN U ALARM
TC3
42
MIN U ALARM
amxu
MAX U ALARM
TC3
43
MAX U ALARM
amxi
MAX I ALARM
TC3
44
MAX I ALARM
DefT
EARTH FAULT
TC3
45
DEF.TRIP
Vpro
PROTECTION BLOCKING
TC4
51
PROT. BLOCKING
Avtp
DELAYED FORWARDS EARTH FAULT
TC4
48
DELAY.FORW.FAULT
Amtp
DELAYED BACKWARDS EARTH FAULT
TC4
49
DELAY.BACK.FAULT
ArOn
AUTO-RECLOSER ON
TC4
46
AR ENABLED
ArOf
AUTO-RECLOSER OFF
TC4
47
AR DISABLED
A-52
EPAC 3100/3500
MS/M 1.6882-C
EPAC COURIER messages
Cell
0000
SYSTEM DATA:
0001
SYS Language
0002
SYS Password
EPAC password
0003
SYS Fn. Links
Enables/disables the setting of certain EPAC functions in
normal user mode.
0004
SYS Description
Description of protection type (16 characters maximum)
0005
SYS Plant Ref.
Description of the EPAC’s location in the system (16
characters maximum)
0006
*SYS Model No.
Description of protection model (16 characters maximum)
0007
*SYS Firmware Ref
Description of EPAC version (16 characters maximum).
Non-modifiable.
0008
*SYS Serial No.
EPAC serial number. Non-modifiable.
0009
*SYS Frequency
Nominal line frequency in Hz.
000A
*SYS Comms Level
COURIER protocol version used
000B
*SYS Rly Address
EPAC address on KBUS network
000C
*SYS Plant Status
Not available
000D
*SYS Ctrl Status
Not available
000E
*SYS Setting Grp
Active EPAC configuration number
000F
*SYS LS Stage
Not available
0010
*SYS CB Control
Not available
0011
*SYS EPAC SoftRef
EPAC board software version
0012
*SYS Interf. Ref
User interface version
0014
*SYS IRIGB Ref
IRIG-B board version
0020
*SYS Log1 Stat
Digital input status on first input board
0021
*SYS Rel1 Stat
Digital output status on second input board
0022
*SYS Alarms
System alarms
0023
*SYS Log2 Stat
Digital input status on first output board
0024
*SYS Rel2 Stat
Digital output status on second output board
0100
USER CONTROLS:
0101
*USR Rly RealTime
Absolute EPAC time
0102
*USR AR Ctrl
Current status of auto-recloser
0103
*USR 1P Recl Cyc
Number of high-speed single-phase cycles activated
0104
*USR 3P Recl Cyc
Number of three-phase cycles activated
0105
*USR 1P-3P Cyc:
Reinitialisation command for single-/three-phase cycle
Clear Cnt = [0]
counters
0106
USR Logic Ctrl
Protection trip on/off
0107
USR Prot Ctrl
Teleaction inhibited
A-53
MS/M 1.6882-C
EPAC 3100/3500
0200
FAULT RECORDS:
0201
FLT Record Sel
Fault report to be consulted
0202
*FLT Record No
Number of fault consulted
0203
*FLT Date
Time and date of fault consulted
0204 → 0206
*FLT IA, FLT IB, FLT IC
Current value on each phase during fault
0207 → 0209
*FLT VA, FLT VB, FLT VC
Voltage value on each phase during fault
020A
*FLT Freq
Line frequency during fault
020B
*FLT R
Fault resistance
020C
*FLT Ph Trip
Phase(s) tripped on fault
020D
*FLT Ph Sel
Phase(s) selected on fault
020E
*FLT Zone
Fault zone
020F
*FLT Location
Fault distance
0210
FLT Trip Ind: Reset = [0] Command to turn off the EPAC’s front panel trip LED’s
0211
FTL Leds
0212
*FLT Faults :
Clear Rec = [0]
0300
MEASUREMENTS:
0301/0302/ *MSR IA, MSR IB,
0303 MSR IC
0304 → 0306
*MSR VA, MSR VB,
MSR VC
0307 → 0309 *MSR PA, MSR PB,
MSR PC
030A → 030C *MSR QA, MSR QB,
MSR QC
Command to delete fault records
Current value on each phase, as percentage of In
Voltage value on each phase, as percentage of Vn
Active power value on each phase, as percentage of Pn
Reactive power value on each phase, as percentage of
Qn
030D
*MSR Freq
Line frequency value
0400
SETTING COMMANDS:
0401
SET Active Setg:
Retrieve = [0]
Retrieves active EPAC configuration to consult/modify
settings
0403
SET Current Setg:
Save = [0]
Saves current configuration on EPAC hard disk.
0500
SOFTWARE OPTIONS:
0501
*SFT License 1
First license number
0502
*SFT License 2
Second license number
0503
*SFT Iso Network
Isolated or compensated network option
0504
*SFT Power Swing
Power swing option
A-54
EPAC 3100/3500
MS/M 1.6882-C
0505
*SFT Def Function
DEF protection option
0506
*SFT SynchroCheck
Synchro-check option
0507
*SFT LDU Brd
Display board option
0508
*SFT Flt Locator
Fault locator option
0509
*SFT TPE Dist
TPE disturbance recording option
050A
*SFT AutoRecloser
Auto-recloser option
050B
*SFT VDEW Board
VDEW communication board option
050C
*SFT 4 SetGroups
Setting groups option
050D
*SFT 16DO Brd
Additional IO-2 board
050E
*SFT V>>,V<<,I>>
Overvoltage, undervoltage and overload protection option
050F
*SFT DO/DI Fixed
Fixed DO/DI option
0510
*SFT 16DO/8DI Brd
Additional IO-1 or IO-3 board
0511
*SFT VDEW Dist
VDEW disturbance recording option
0512
*SFT AC Brd
AC board option
0513
*SFT COURIER Comm
COURIER communication option
0514
*SFT COURIER Dist
COURIER disturbance recording option
0515
*SFT IRIG.B Synch
IRIG-B time synchronisation option
0516
*SFT TPE Modem
TPE modem option
0517
*SFT PWH
Zero Sequence Power option
0518
*SFT Local Print
Local printer option
0600
HARDWARE SETTING:
0601
*HRD AC Brd
AC board
0602
*HRD 2nd I/O Brd
Additional I/O board
0603
*HRD IRIG.B Brd
IRIGB board
1000
LINE CHARACTERISTICS:
1001
LIN UN
Nominal voltage
1002
LIN IN
Nominal current
1003
LIN Line Length
Length of line in km
1004
LIN Line Length
Length of line in miles
1005
LIN Ku
Voltage transformer
1006
LIN Ki
Current transformer
1007
LIN Known Char
Known line characteristics
1008
LIN Zd
Positive sequence impedance Zd
1009
LIN Phid
Zd argument
A-55
MS/M 1.6882-C
EPAC 3100/3500
100A
LIN Z01
Zero sequence impedance Z01
100B
LIN Phi01
Z01 argument
100C
LIN Z02
Zero sequence impedance Z02
100D
LIN Phi02
Z02 argument
100E
LIN Rd
Positive sequence resistance
100F
LIN Xd
Positive sequence reactance
1010
LIN R01
Zero sequence resistance
1011
LIN X01
Zero sequence reactance
1012
LIN R02
Zero sequence resistance
1013
LIN X02
Zero sequence reactance
1014
LIN K01r
Real part of K01
1015
LIN K01x
Imaginary part of K01
1016
LIN K02r
Real part of K02
1017
LIN K02x
Imaginary part of K02
1100
ZONE SETTING:
1101
ZON Z1
Zone 1 impedance
1102
ZON Z1Overreach
Extended zone 1 impedance
1103
ZON T1
Zone 1 time delay
1104
ZON Z2
Zone 2 impedance
1105
ZON T2
Zone 2 time delay
1106
ZON Z3
Zone 3 impedance
1107
ZON T3
Zone 3 time delay
1108
ZON Dir. Z3
Zone 3 direction
1109
ZON Z4
Zone 4 impedance
110A
ZON T4
Zone 4 time delay
110B
ZON Z5
Zone 5 impedance
110C
ZON T5
Zone 5 time delay
110D
ZON T>>
I> time delay
110E
ZON T>
I>> time delay
110F
ZON Ph/Gnd RZ1
Single-phase loop resistance for zone 1
1110
ZON Ph/Ph RZ1
Two-phase loop resistance for zone 1
1111
ZON RLim Z2
Zone 2 loop resistance
1112
ZON RLim Z3
Zone 3 loop resistance
1113
ZON RLim Starter
Start-up loop resistance
1114
ZON I>> Acti.
I>> threshold activated
1115
ZON I>>
I>> threshold value
A-56
EPAC 3100/3500
MS/M 1.6882-C
1116
ZON Dir. I>>
I>> threshold direction
1117
ZON I> Acti.
I> threshold activated
1118
ZON I>
I> threshold value
1119
ZON Dir. I>
I> threshold direction
1200
LOGIC SCHEME:
1201
LOG Trip Type
Tripping type
1202
LOG Logic Schm
Teleaction type
1203
LOG Zone Reduct
Zone reduction
1204
LOG Bus Coupler
Busbar isolation
1205
LOG HF/Unblk
HF acceptance or unblocking
1206
LOG Car Sd
Command type
1207
LOG tCARSD
Transmission time delay
1300
TEE LINE LOGIC SCHEME:
1301
TEE Tee Line
Tee line presence
1302
TEE Logic Schm
Teleaction type
1303
TEE HF/Unblk
Line carrier acceptance or unblocking
1304
TEE Car Sd
Transmission type
1305
TEE tCARSD
Transmission time delay
1400
WEAK-INFEED SETTING:
1401
WEA Weak-infeed
Activation of Weak Infeed mode
1402
WEA Blk on PWS
Blocking on power swing
1403
WEA Trip Mode
Tripping authorisation
1404
WEA Conf by V<
Confirmation by insufficient voltage
1405
WEA V<
Insufficient voltage threshold
1406
WEA I>
Open phase detection threshold
1407
WEA tTRIP
Tripping time delay
1408
WEA tBLKDROPOFF
Blocking time on drop-off of start-up element
1500
POWER SWING SETTING:
1501
PWS Detect Zone
Power swing band impedance
1502
PWS Blk Type
Blocking type
1503
PWS Trip Mode
Tripping type
1504
PWS Indep Z1
First zone independent
1505
PWS Blk Car Sd
Teleaction transmission blocking
A-57
MS/M 1.6882-C
EPAC 3100/3500
1506
PWS Blk Car Rec
Teleaction reception blocking
1507
PWS tUNBLK
Unlocking time delay on power swing
1508
PWS IR Unblk
Unlocking on current threshold
1509
PWS Unblk IR>
Unlocking threshold percentage
150A
PWS IM Unblk
Unlocking authorisation on Imax
150B
PWS Unblk IM>
Unlocking threshold on Imax
150C
PWS I2 Unblk
Unlocking on current threshold
150D
PWS Unblk I2>
Unlocking threshold percentage
1600
DEF SETTING:
1601
DEF Def
Activation of DEF mode
1602
DEF VR>
Residual voltage threshold
1603
DEF Forward IR>
Threshold of residual current for forward fault
1604
DEF Trip Schm
Tripping type
1605
DEF Indep Chan
Independent teleaction channel
1606
DEF Logic Schm
Type of tripping scheme
1607
DEF tCARSD
Time delay for teleaction transmission
1608
DEF Tee Log Schm
Type of tee line tripping scheme
1609
DEF Tee tCARSD
Time delay for tee line teleaction transmission
160A
DEF tOPERATE
Operation time delay
160B
DEF BackUp Rly
Activation of backup protection
160C
DEF BackUp ARBlk
Auto-recloser blocking by backup protection
160D
DEF IR>>
Residual current threshold
160E
DEF I Factor
Multiplier factor I
160F
DEF P Factor
Multiplier factor V
1610
DEF Curves
Curve standard
1611
DEF IEC Curves
Type of IEC curve
1612
DEF ANSI Curves
Type of ANSI curve
1700
AUTO-RECLOSER SETTINGS:
1701
ARC t1PFASTDEAD
Time delay for high-speed single-phase cycle
1702
ARC t3PFASTDEAD
Time delay for high-speed three-phase cycle
1703
ARC tSLOWDEAD
Time delay for low-speed cycle
1704
ARC Recl Time
Duration of reclosing order
1705
ARC tRECLAIM
Reclaim time
1706
ARC tRECLAIMBKUP
Backup protection reclaim time
1707
ARC 1P Recl Mode
Single-phase reclosing/tripping mode
A-58
EPAC 3100/3500
MS/M 1.6882-C
1708
ARC 3P Recl Mode
Three-phase reclosing/tripping mode
1709
ARC 3P Recl BkUp
Backup protection reclosing/tripping mode
1800
ISOLATED OR COMPENSATED NETWORK:
1801
ISO Iso Network
RNI presence
1802
ISO tPermanent
Permanent fault signal time delay
1803
ISO Loop Sel
Loop selection criterion
1804
ISO IR>
Residual current threshold
1805
ISO VR>
Residual voltage threshold
1806
ISO Ph/Gnd Trip
Tripping on maximum residual voltage
1807
ISO tTRIP
Tripping time delay
1808
ISO PWH
Zero-sequence power activated
1809
ISO Kir
Current reductor
180A
ISO IR>
Residual current threshold
180B
ISO KpIr
Power multiplier K
180C
ISO TRIP Arg.
Tripping phase angle
180D
ISO I>
I1 threshold for a max. primary torus phase angle
180E
ISO I> Arg.
Primary torus phase angle at I1
180F
ISO I>>
I2 threshold for a max. primary torus phase angle
1810
ISO I>> Arg.
Primary torus phase angle at I2
1811
ISO tRestart
Auto-start faults period
1900
SYNCHRO-CHECK SETTINGS:
1901
SYN Sync Schm
Type of synchro-check
1902
SYN Sync 3P 1Dd
Synchro-check on high-speed three-phase cycle
1903
SYN Busbar V<
Threshold for absence of busbar voltage
1904
SYN Line V<
Threshold for absence of line voltage
1905
SYN Line V>
Threshold for presence of line voltage
1906
SYN Busbar V>
Threshold for presence of busbar voltage
1907
SYN (VLn-VBb)<
Threshold for Uline-Ubusbar difference
1908
SYN (FLn-FBb)<
Threshold for Fline-Fbusbar difference
1909
SYN (PhLn-PhBb)<
Threshold for PHIline-PHIbusbar difference
190A
SYN tLLLB
Loopback time delay
190B
SYN Phase Sel
Phase selected
1A00
V>>, V<<, I>>:
1A01
OVL V<< & V>>
Relay activated
1A02
OVL V<<
Min U threshold
A-59
MS/M 1.6882-C
EPAC 3100/3500
1A03
OVL V<< tTRIP
Min U tripping time
1A04
OVL V>>
Max U threshold
1A05
OVL V>> tALARM
Max U time delay
1A06
OVL Trip on V>>
Tripping on Max U
1A07
OVL I>>
Overload protection
1A08
OVL I1>
Fixed threshold I1
1A09
OVL tTRIP I1>
Threshold I1 tripping time delay
1A0A
OVL I2>
Fixed threshold I2
1A0B
OVL tTRIP I2>
Threshold I2 tripping time delay
1A0C
OVL I3>
Fixed threshold I3
1A0D
OVL tTRIP I3>
Threshold I3 tripping time delay
1A0E
OVL Curves
Curve type
1A0F
OVL IEC Curves
Choice of IEC curve
1A10
OVL ANSI Curves
Choice of ANSI curve
1A11
OVL I Factor
Line current threshold
1A12
OVL I>
Multiplier factor
1B00
MISCELLANEOUS PARAMETERS:
1B01
MIS Trip Seal-in
Seal-in if current present
1B02
MIS Seal-in I>
Current threshold for seal-in
1B03
MIS AR Blk
Time delay for auto-recloser locking
1B04
MIS AR on Flt I>
Threshold for reclosing on fault
1B05
MIS tREVGUARD
Additional time for reverse directional
1C00
FUSE FAILURE:
1C01
FUS I0,I1 Thr.
I0,I1 current threshold
1C02
FUS tAlarm
Alarm time delay
1C03
FUS IFus>Acti.
Ifus> threshold activated
1C04
FUS IFus>
Ifus> threshold value
1C05
FUS tFus>
Ifus> threshold time delay
1C06
FUS IFus>>Acti.
Ifus>> threshold activated
1C07
FUS IFus>>
Ifus>> threshold value
1C08
FUS tFus>>
Ifus> threshold time delay
1C09
FUS IR>Acti.
Ir> threshold activated
1C0A
FUS IRs>
Ir> threshold value
1C0B
FUS tIR>
fr> threshold time delay
1C0C
FUS AR Blk
Autorecloser blocking
A-60
EPAC 3100/3500
MS/M 1.6882-C
2000
TPE PARAMETERS:
2001
TPE Synchr by UR
Synchronisation by UR
2002
TPE EPAC Addr UR
EPAC UR address
2003
TPE Baud Rate
Modem baud rate
2004
TPE Phone Number
Phone number
2005
TPE Modem Init
Modem configuration message
2100
LOCAL PRINTER CONFIGURATION:
2101
PRN DRIVER
3000
OUTPUT CONFIGURATION:
3001
DO1 A Trip
A phase tripping
3002
DO1 B Trip
B phase tripping
3003
DO1 C Trip
C phase tripping
3004
DO1 1P Trip
Single pole tripping
3005
DO1 FusFail Trip
Fuse failure tripping
3006
DO1 A Sel
A phase selection
3007
DO1 B Sel
B phase selection
3008
DO1 C Sel
C phase selection
3009
DO1 Fwd Dir
Forward directional
300A
DO1 Rev Di
Reverse directional
300B
DO1 Z1 Dec
Zone 1 fault
300C
DO1 Z2 Dec
Zone 2 fault
300D
DO1 Z3 Dec
Zone 3 fault
300E
DO1 Z4 Dec
Zone 4 fault
300F
DO1 Z5 Dec
Zone 5 fault
3010
DO1 Prot Start
Distance protection start-up
3011
DO1 Ph/Ph Flt
Multi-phase fault
3012
DO1 Ph/Gnd Flt
Single-phase fault
3013
DO1 Car Sd
Teleaction transmission
3014
DO1 Tee Car Sd
Teleaction transmission for tee line
3015
DO1 Self-tests
Self-test in progress
3016
DO1 Urg Alarm
Urgent alarm
3017
DO1 NonUrg Alarm
Non-urgent alarm
3018
DO1 Fus Fail
Fuse failure
3019
DO1 AR Blk Cmd
Auto-recloser blocking
301A
DO1 Unblk Sd
Unblocking transmission
301B
DO1 Tee Unblk Sd
Tee line unblocking transmission
Local printer driver
A-61
MS/M 1.6882-C
EPAC 3100/3500
301C
DO1 SwOver Bit 0
Bit 0 switchover
301D
DO1 SwOver Bit 1
Bit 1 switchover
301E
DO1 Pws Detect
Detection of power swing
301F
DO1 Def Sd
Directional comparison transmission
3020
DO1 Tee Def Sd
Tee line directional comparison transmission
3021
DO1 Def Trip
Tripping by DEF protection
3022
DO1 Weak Trip
Tripping by Weak Infeed
3023
DO1 AR Enabled
Tripping authorisation by synchro-check
3024
DO1 AR Blk
Auto-recloser blocking
3025
DO1 BkUp AR Blk
Low-speed auto-recloser blocking
3026
DO1 1P AR Cyc
Single-phase cycle in progress
3027
DO1 3P AR Cyc
Three-phase cycle in progress
3028
DO1 3P Trip
Ordinary three-phase trip
3029
DO1 CB Close
Reclosing signal
302A
DO1 Sync V Flt
Voltage fault by synchro-check
302B
DO1 V<< Alarm
MinU alarm
302C
DO1 V>> Alarm
Max U alarm
302D
DO1 I>> Alarm
Overload alarm
302E
DO1 Earth Flt
Ground fault
302F
DO1 Del. Fwd Flt
Delayed forward earth fault
3030
DO1 Del. Rev Flt
Delayed backward earth fault
3031
DO1 AR ON
Auto-recloser enabled
3032
DO1 AR OFF
Auto-recloser disabled
3033
DO1 Prot. Blk
Protection blocked
3034
DO1 3P Tripping
Three-phase tripping
3100
OUTPUT CONFIGURATION (2ND BOARD):
3101 → 3134
3200
3201 → 3234
The same outputs are configured as on the first board. Their name has a DO2 prefix.
OUTPUT SETTING FOR DISTURBANCE:
The same outputs are configured for disturbance recording as on the digital output
board(s). Their name has a DOD prefix.
Setting possible:
- No: Cannot start up disturbance recording.
- Low to High: Start-up from low to high.
- High to Low: Start-up from high to low.
- No trip: Without tripping.
A-62
EPAC 3100/3500
MS/M 1.6882-C
4000
INPUT CONFIGURATION:
4001
DI1 Fus Fai
Fuse failure
4002
DI1 Manual Recl
Manual tripping
4003
DI1 Car Rec
Teleaction reception
4004
DI1 Tee Car Rec
Teleaction reception for tee line
4005
DI1 Prot Blk
Protection blocking
4006
DI1 3P Trip
Ordinary three-phase tripping
4007
DI1 HF/Unblk
HF acceptance or unblocking
4008
DI1 Tee HF/Unblk
HF acceptance or unblocking with teeline
4009
DI1 Zone Reduct
Zone reduction
400A
DI1 SwOver Bit 0
Bit 0 switchover
400B
DI1 SwOver Bit 1
Bit 1 switchover
400C
DI1 Def Rec
Reception of directional teleaction for DEF protection
400D
DI1 Tee Def Rec
Reception of directional teleaction for tee line for DEF
protection
400E
DI1 Start Dist
Disturbance recording start-up
400F
DI1 A Trip
A phase tripping
4010
DI1 B Trip
B phase tripping
4011
DI1 C Trip
C phase tripping
4012
DI1 BkUp Trip
Tripping by backup protection
4013
DI1 Low Pression
Low auto-recloser pressure
4014
DI1 No Recl
Reclosing impossible
4015
DI1 AR ON
Auto-recloser enabled
4016
DI1 AR OFF
Auto-recloser disabled
4017
DI1 1P AR Cyc
Single-phase cycle in progress
4018
DI1 Bb Fus Fail
Busbar fuse failure
4019
DI1 P Discrep
Poles discrepancy
401A
DI1 CB Closed
Three-phase circuit breaker position
4100
INPUT CONFIGURATION (2ND BOARD)
4101→ 411A
4200
4201→ 421A
The same inputs are configured as on the digital input board(s). Their name has a DI2
prefix.
INPUT SETTING FOR DISTURBANCE:
The same inputs are configured for disturbance recording as on the first board. Their
name has a DID prefix.
Setting possible:
- No: Cannot start up disturbance recording.
- Low to High: Start-up from low to high.
- High to Low: Start-up from high to low.
- No trip: Without tripping.
A-63
MS/M 1.6882-C
EPAC 3100/3500
5000
ANALOGUE SETTING FOR DISTURBANCE:
5001
ASD Analog Trig
Analogue thresholds
5002
ASD IA>
Maximum A phase current start-up threshold
5003
ASD IA<
Minimum A phase current start-up threshold
5004
ASD IB>
Maximum B phase current start-up threshold
5005
ASD IB<
Minimum B phase current start-up threshold
5006
ASD IC>
Maximum C phase current start-up threshold
5007
ASD IC<
Minimum C phase current start-up threshold
5008
ASD IR>
Maximum residual current start-up threshold
5009
ASD IR<
Minimum residual current start-up threshold
500A
ASD VA>
Maximum A phase voltage start-up threshold
500B
ASD VA<
Minimum A phase voltage start-up threshold
500C
ASD VB>
Maximum B phase voltage start-up threshold
500D
ASD VB<
Minimum B phase voltage start-up threshold
500E
ASD VC>
Maximum C phase voltage start-up threshold
500F
ASD VC<
Minimum C phase voltage start-up threshold
5010
ASD VR>
Maximum residual voltage start-up threshold
5011
ASD VR<
Minimum residual voltage start-up threshold
5012
ASD F>
Maximum frequency threshold
5013
ASD F<
Minimum frequency threshold
8000
RECORDER:
8001
*REC Control
Recorder status
8002
*REC Capture
Type of samples recorded
8003
REC Pre Trigger
Duration of pre-time for next record
8004
REC Post Trigger
Duration of post-time for next record
9000
DISTURBANCE REC.:
9001
DIS Record No
Event number
9002
*DIS Trigger Time
Trigger time
9003
*DIS Ch Available
List of channels available for recording
9004
*DIS Ch Types
Type of channels available for recording
9005
*DIS Upload channel offsets
Offset values
9006
*DIS Upload Scaling Factors
Factors applied to all samples on the channel
9007
*DIS Upload Skew Values
At 0
9008
*DIS Upload Minimum Values
Minimum Values
9009
*DIS Upload Maximum Values Maximum Values
9010
*DIS Rec Length
Number of samples recorded
A-64
EPAC 3100/3500
MS/M 1.6882-C
9011
*DIS Trigger Posn
Number of first sample
9012
*DIS Time Base
Interval coefficient
9013
*DIS Delta T
Difference between two successive samples
*DIS Upload channel 0 to 7
Uploads samples from channels 0 to 7
9020→ 9027
*DIS Upload digital group
9028/9029
1 to 2
Uploads digital groups 1 to 2
A000
MAINTENANCE DATA:
A001
MNT Record Sel
Maintenance record selector
A002
*MNT Record No
Maintenance record number
A003
*MNT Date
Maintenance record date
A003
*MNT Boards
Faulty boards
A005
*MNT Gravity
Gravity of fault
A006
*MNT Fail Typ1
Nature of fault
A007
*MNT Fail Typ2
Nature of fault
A008
*MNT Fail Typ3
Nature of fault
A009
*MNT Fail Typ4
Nature of fault
A00A
*MNT Fail Typ5
Nature of fault
A00B
*MNT Error Code
Error code
A00C
*MNT Alarms Ind
Alarm acknowledgement
A00D
*MNT Maint. : Clear Rec = [0] Command to delete maintenance records
BF00
COMM SYSTEM DATA:
BF01
*COM Rec Ctrl
Area of the EPAC database containing the elements
required to control the recording of disturbance
events
BF02
*COM Rec Load
Area of the EPAC database containing the elements
required to retrieve and manage a disturbance event
that has been recorded.
(*) Data non settable
A-65
MS/M 1.6882-C
EPAC 3100/3500
Display Functions
Level 1
LEDS
CONF__
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Level 2
Level 3
Level 4
PARA(1)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PROT__
|
|
|
|
|
|
|
|
|
|
|
|
|_______
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|_______
|
|
|
|
|
|
|
|_______
|
|
|
|
|
LIGN
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
SURV
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
TELE
|_______
|_______
|_______
|_______
|_______
|_______
|_______
PIQU
|_______
|_______
|_______
|_______
|_______
Level 5
Comments (Help)
Reset Leds
UN
IN
FREQ
LONG
KU
KI
R01
R02
X01
X02
Xd
Rd
Nominal voltage in Volts
Nominal current in Amps
Nominal frequency in Hz
Line length in Km or miles
Voltage transformer ratio
Current transformer ratio
Zone 1 zero sequence resistance
Start-up zero sequence resistance
Zone 1 zero sequence reactance
Start-up zero sequence reactance
Positive sequence reactance in Ohms
Positive sequence resistance in Ohms
Z1
Z1e
T1
Z2
T2
Z3
T3
DiZ3
Z4
T4
Z5
T5
T6
T7
R1m
R1b
R2
R3
Rmr
AI>>
I>>
DI>>
AI>
I>
DI>
Zone 1 impedance in Ohms
Overreach zone 1 impedance in Ohms
First step time delay in ms
Zone 2 impedance in Ohms
Second step time delay in ms
Zone 3 impedance in Ohms
Third step time delay in ms
Zone 3 direction
Zone 4 impedance in Ohms
Fourth step time delay in ms
Zone 5 impedance in Ohms
Fifth step time delay in ms
I> threshold time delay in ms
I>> threshold time delay in ms
Phase-earth resist. zone 1
Phase-phase resist. zone 1
Limit resistance for zone 2
Limit resistance for zone 3
Start-up limit resistance
I>> current threshold enabled
I>> current threshold in IN
I>> current threshold direction
I> current threshold enabled
I> current threshold in IN
I> current threshold direction
Dec
Type
Redu
Phde
Emis
Temi
DebB
Tripping type (Mono/Ban1/Ban2)
Distance protection type
Zone reach control (Yes/No)
Dist. prot. control (Pas/Dev/Prmf)
Emission type (Ez1/Ez2/Ez5)
Transmission time delay
Busbar isolation (Yes/No)
Acti
Type
Phde
Emis
Temi
Tee line enabled (Yes/No)
Distance protection scheme
Dist. prot. control (Pas/Dev/Prmf)
Emission type
Transmission time delay
A-66
EPAC 3100/3500
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MS/M 1.6882-C
|_______
|
|
|
|
|
|
|
|
|_______
|
|
|
|
|
|
|
|
|
|
|
|
|
|_______
|
|
|
|
|
|
|
|
|
|
|
|
|_______
|
|
|
|
|
|_______
|
|
|
|
|
|
|
|
|
|
|_______
|
|
|
|
WEAK
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
POMP
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
FFUS
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
SEAL
|_______
|_______
|_______
|_______
|_______
DEFD
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
DEFI
|_______
|_______
|_______
|_______
Acti
Verp
Dec
Conu
Smtw
Smcw
Tdec
Tver
Weak-infeed enabled (Yes/No)
Blocking on power swing (Yes/No)
Tripping type
Confirmation by under voltage
Under voltage threshold in % of Vn
Current detection threshold
Tripping time delay in ms
Blocking time delay in ms
Bdpm
tDec
tver
Z1in
Vrem
Vert
Tdvr
Scir
Ir%
Scii
Ii%
Scim
Imax
Power swing boundary in Ohms
Tripping type (1-phase/3-phase)
Blocking type
1st zone independent
Carrier send blocking
Carrier receive blocking
Time delay for unblocking on power swing
Unblocking on Ir
Ir threshold in % of Imax
Unblocking on Ii
Ii threshold in % of Imax
Unblocking on Imax
Imax threshold in % of IN
Sffi
Tffs
AI>
If>
Tf>
AI>>
If>>
Tf>>
AIr>
Ir>
TIr>
Verf
I0 and I1 threshold detection
Fuse failure alarm time delay in s
If> threshold enabled
If> threshold
If> tripping time delay
If>> threshold enabled
If>> threshold
If>> tripping time delay
Ir> threshold enabled
Ir> threshold
Ir> tripping time delay
Auto-recloser blocking on Ifus tripping
Seal
Isea
Venc
Ienc
Rvg
Seal-In enabled (Yes/No)
Seal-in current threshold in % of IN
Auto-recloser blocking
Threshold for CB closed on fault.
Reverse Guard time delay (Norm or Def)
Acti
Vrd
Ied
Dec.
Cane
Type
Tran
Typi
Trai
Tfon
DEF enabled (Yes/No)
Vr start-up threshold
IR forward start-up threshold
Tripping type (1-phase, 3-phase)
Independent teleprot. channel (Yes/No)
Teleprotection scheme (auto/bloc)
Teleprotection time delay
Tee-line teleprotection scheme
Tee-line teleprotection time delay
Operation time
Acti
Tfon
Ie
Coei
Inverse time enabled (No/Current/Power)
Operation time
Ir start-up threshold
Multiplier ratio (current)
A-67
MS/M 1.6882-C
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EPAC 3100/3500
|
|
|
|
|
|_______
|
|
|
|
|
|
|
|
|
|_______
|
|
|
|
|
|
|
|
|
|
|
|_______
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|_______
|
|
|
|
|
|
|_______
|
|
|
|
|
|_______
|______
|_______
|_______
|_______
ARC
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
SYNC
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
PET
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
RELU
|_______
|_______
|_______
|_______
|_______
|_______
RELI
|_______
|_______
|_______
|_______
|_______
Coep
Tyno
TyCb
TypU
VArS
Multiplier ratio (power)
Standard type (IEC or ANSI)
Curve type (current)
ANSI curve type
AR blocked on backup prot. trip
Tcrm
Tcrt
Tclt
Tenc
Tbloc
Tbps
Mono
Tri
Mrps
Single pole recl (1st dead time)
Three pole recl. (1st dead time)
Three pole recl. (other dead time)
Reclosing time delay
Reclaim time
Delayed reclaim time
Recl. mode on single pole tripping.
Recl. mode on three pole tripping..
Recl. mode on backup tripping.
Type
Vpl
Vpb
Val
Vab
Evec
Efre
Epha
Tbou
vlin
Cutr
Synchro-check scheme
Live line threshold
Live busbar threshold
Dead line threshold
Dead busbar threshold
Uligne - Ubarre threshold
Fligne - Fbarre threshold
PHligne - PHbarre threshold
Live busbar / live line delay
Phase selected for voltage
Synchrocheck on high speed cycle
Acti
Tdsp
Type
SIr2
Scr
Str
Dec
Temp
APWH
Kir
SIr
KpIr
DpIr
I1
DI1
I2
DI2
Pdfr
PET enabled (Yes/No)
Permanent fault time delay
Phase selection criteria
Ir current threshold for double faults
Residual current threshold
Residual voltage threshold
Tripping authorised (Yes/No)
Tripping time delay
Zero-seq. power function enabled
Ir current reductor
Residual current threshold.
Power factor K
Characteristics angle
I1 threshold on primary torus
I1 phase angle on primary torus
I2 threshold on primary torus
I2 phase angle on primary torus
Auto-start fault period
Acti
Vbas
Tmnu
Vhau
Tmxu
DmxU
Max U/Min U relays enabled (Yes/No)
Min U voltage threshold
Min U tripping time delay
Max U voltage threshold
Min U tripping or alarm time delay
Max U tripping (Yes/No)
Acti
I1
TpI1
I2
TpI2
MaxI relay enabled (Yes/No)
I1 fixed threshold
I1 threshold tripping time delay
I2 fixed threshold
I2 threshold tripping time delay
A-68
EPAC 3100/3500
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|_______
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MS/M 1.6882-C
|
|
|
|
|
|
|
|_______
|
|
|
|
|
|
|_______
|
I-O____
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|______
|_______
|______
|_______
|_______
|_______
|_______
COMM
|_______
|_______
|_______
|_______
|_______
|_______
IMP
|_______
OUT1
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
I3
TpI3
Tyno
TypC
TypU
Tm
Is
I3 fixed threshold
I3 threshold tripping time delay
Standard type (IEC or ANSI)
IEC curve type
ANSI curve type
IEC multiplier coefficient
Current threshold
AdUA
BMod
SyUR
AVde
BKBs
ACou
TPE address
Modem rate
Synchronisation by UR
VDEW address
VDEW communication time delay
Courier address
Type
Local printer type
DecA
DecB
DecC
DecM
Decf
SelA
SelB
SelC
Aval
Amo
Z1
Z2
Z3
Z4
Z5
Mro
Poly
Mono
Tele
Telp
Auto
Alur
Alnu
Ffus
Varc
Dver
Dvep
cfg0
cfg1
Dpom
Tede
Tedp
ddef
Dwea
auts
blar
BArS
cmon
ctri
bant
enc
defs
amnu
Phase A tripping
Phase B tripping
Phase C tripping
One phase tripping
Fuse failure tripping
Phase A selection
Phase B selection
Phase C selection
Forward directional
Reverse directional
Zone 1
Zone 2
Zone 3
Zone 4
Zone 5
Start-up
Multi-phase fault
One-phase fault
Carrier send
Carrier send for tee line
Self-test in progress
Urgent alarm
Non-urgent alarm
Fuse failure alarm
Auto-recloser blocking
Unblocking signal transmission
Unblocking signal transmission for tee line
bit0 switchover
bit1 switchover
Power swing detection
Directional comparison signal
Directional comparison signal for tee line
Tripping by DEF protection
Tripping by Weak-infeed protection
Recl. enabled by synchro-check
Auto-recloser blocking
Back-up auto-recloser blocking
Single pole cycle in progress
Three pole cycle in progress
Analyse trip 3-phase
Reclosing signal
AC Voltage fault
MinU alarm
A-69
MS/M 1.6882-C
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EPAC 3100/3500
|
|
|
|
|
|
|
|
|
|_______
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
OUT2
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
amxu
amxi
DefT
Avtp
Amtp
ArOn
ArOf
Vpro
Dec3
MaxU alarm
MaxI alarm
Ground fault
Delayed forward ground fault
Delayed reverse ground fault
Auto-recloser enabled
Auto-recloser disabled
Protection blocking
Three-pole tripping
DecA
DecB
DecC
DecM
Decf
SelA
SelB
SelC
Aval
Amo
Z1
Z2
Z3
Z4
Z5
Mro
Poly
Mono
Tele
Telp
Auto
Alur
Alnu
Ffus
Varc
Dver
Dvep
cfg0
cfg1
Dpom
Tede
Tedp
ddef
Dwea
auts
blar
BArS
cmon
ctri
bant
enc
defs
amnu
amxu
amxi
DefT
Avtp
Amtp
ArOn
Phase A tripping
Phase B tripping
Phase C tripping
One phase tripping
Fuse failure tripping
Phase A selection
Phase B selection
Phase C selection
Forward directional
Reverse directional
Zone 1
Zone 2
Zone 3
Zone 4
Zone 5
Start-up
Multi-phase fault
One-phase fault
Carrier send
Carrier send for tee line
Self-test in progress
Urgent alarm
Non-urgent alarm
Fuse failure alarm
Auto-recloser blocking
Unblocking signal transmission
Unblocking signal transmission for tee line
bit0 switchover
bit1 switchover
Power swing detection
Directional comparison signal
Directional comparison signal for tee line
Tripping by DEF protection
Tripping by Weak-infeed protection
recl. enabled by synchro-check
Auto-recloser blocking
Back-up auto-recloser blocking
Single pole cycle in progress
Three pole cycle in progress
Ordinary 3-phase trip
Reclosing signal
AC Voltage fault
MinU alarm
MaxU alarm
MaxI alarm
Ground fault
Delayed forward ground fault
Delayed reverse ground fault
Auto-recloser enabled
A-70
EPAC 3100/3500
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|_______
MS/M 1.6882-C
|
|
|
|_______
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|_______
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VALI
|_______
|_______
|_______
INP1
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
INP2
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
ArOf
Vpro
Dec3
Auto-recloser disabled
Protection blocking
Three-pole tripping
Ffus
Encl
Rece
Recp
Vprt
Bant
phde
phdp
Redu
cfg0
cfg1
Rede
Redp
Pert
deca
decb
decc
DePS
barc
iarc
arcn
arcf
cymn
fusb
disc
disj
Fuse failure signal
CB closed
Carrier reception
Carrier reception for tee line
Protection blocking
Ordinary 3-phase trip
HF acceptance or unblocking
HF acceptance or unblocking for tee line
Zone reach control signal reception
bit0 switchover
bit1 switchover
Directional comparison signal
Directional comparison signal for tee line
Disturbance recording starting
Phase A tripping
Phase B tripping
Phase C tripping
External backup prot. trip. signal
Low pressure
Reclosing impossible
Auto-recloser enabled
Auto-recloser disabled
One-pole cycle in progress
Busbar fuse failure
Pole discrepancy
CB closed
Ffus
Encl
Rece
Recp
Vprt
Bant
phde
phdp
Redu
cfg0
cfg1
Rede
Redp
Pert
deca
decb
decc
DePS
barc
iarc
arcn
arcf
cymn
fusb
disc
disj
Fuse failure signal
CB closed
Carrier reception
Carrier reception for tee line
Protection blocking
Ordinary 3-phase trip
HF acceptance or unblocking
HF acceptance or unblocking for tee line
Zone reach control signal reception
bit0 switchover
bit1 switchover
Directional comparison signal
Directional comparison signal for tee line
Disturbance recording starting
Phase A tripping
Phase B tripping
Phase C tripping
External backup prot. trip. signal
Low pressure
Reclosing impossible
Auto-recloser enabled
Auto-recloser disabled
One-pole cycle in progress
Busbar fuse failure
Pole discrepancy
CB closed
Current configuration transmission
A-71
MS/M 1.6882-C
EPAC 3100/3500
|
|_______
DFIN
|
|_______
Num
|
|_______
Post
|
|_______
Dep
|
|_______
Opt1
|
|_______
LIC1
|
|_______
LIC2
|
|_______
LANG
|
|_______
Dist
|
|_______
Decl
|
|_______
ACTI
|EVEN____ LIST______
|
|
|_______
EV1
|
|
|_______
EV2
|
|
|_______
EV3
|
|
|_______
EV4
|
|
|_______
EV5
|
|
|_______
EV6
|
|
|_______
EV7
|
|
|_______
EV8
|
|
|_______
EV9
|
|
|_______
EV10
|
EFF________________________________________
MES__________________________________________________
Configuration number (1-4)
Substation name
Feeder name
Additional I/O card (Yes/No)
1st license word
2nd license word
Language (Fr/Ang/All/Esp)
Length unit (Km/Ml)
Length unit in fault records (Km/Ml/
%L/ΩB/ΩH)
Active configuration switchover
Event record 1
Event record 2
Event record 3
Event record 4
Event record 5
Event record 6
Event record 7
Event record 8
Event record 9
Event record 10
Reset Event records
Network measurements
(PA,B,C/QA,B,C/UA,B,C/ZA,B,C/FREQ/
OUT1/INP1/DATE/TIME/TRAN)
ARC______
ETAT
|
CMD
|_______
|_______
MAIN
|_______
|
|
|_______
|_______
|
|
|
|
|
|
|
|
|
|
PASS
|_______
|_______
DATE
|_______
|_______
ACQU(2)
LIST_______
|
|
|
|
|
|
|
|
|
|
EFF
Auto-recloser and counter status
(Mono/Tri/Etat)
ARC
cpts
Change auto-recloser status (ON/OFF)
Reset counters
Date
Heur
View and change date
View and change time
Ack. alarms and type in password
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
|_______
DF1
DF2
DF3
DF4
DF5
DF6
DF7
DF8
DF9
DF10
SAIS
MODI
Type in current password
Change password
Select configuration number
CHXCONF
PERT
|_______
|
|
|
llis
|
|
|
Fault report 1
Fault report 2
Fault report 3
Fault report 4
Fault report 5
Fault report 6
Fault report 7
Fault report 8
Fault report 9
Fault report 10
Reset fault reports
|_______
|_______
|_______
Per1
Per2
Per3
Disturbance
Disturbance
Disturbance
Disturbance
record
record
record
record
list
1
2
3
A-72
EPAC 3100/3500
|
|
|
|
|
|
|
|
LANG
|
|
|
|
|
|
|
EFF
MS/M 1.6882-C
|_______
|_______
|_______
|_______
|_______
|_______
|_______
Per4
Per5
Per6
Per7
Per8
Per9
Pe10
Disturbance record 4
Disturbance record 5
Disturbance record 6
Disturbance record 7
Disturbance record 8
Disturbance record 9
Disturbance record 10
Reset disturbance records
Temporary display language
A-73
MS/M 1.6882-C
EPAC 3100/3500
Connections to a PC or a printer
WinEPAC
Front view of the EPAC
TRIP
GEC ALSTHOM
ALARM
DCL 382 cable
RELAY AVAILABLE
DB 25
SET
TERMINAL 1
Help
TERMINAL 2
WinEPAC PC
DB 25
WinV24
Front view of the EPAC
TRIP
GEC ALSTHOM
ALARM
RELAY AVAILABLE
DCL 382 cable
SET
TERMINAL 1
Help
TERMINAL 2
DB 25
WinV24 PC
DB 25
Printer
Front view of the EPAC
TRIP
GEC ALSTHOM
ALARM
RELAY AVAILABLE
DCL 399 cable
SET
TERMINAL 1
Help
TERMINAL 2
DB25
DB 25
The printer settings must be the following: 9600 bps, 7 bits,
1 stop bit, even parity.
Local printer
A-74
EPAC 3100/3500
MS/M 1.6882-C
WinMODEM
DB9
(Serial port)
DCL 396
cable
Remote PC
for disturbance
records (WinModem
and WinAnalyse)
DCL 396
cable
Rear view of the EPAC
DB 25
DB 25
Modem
Modem
K-Bus-COURIER
Rear view of the EPAC
DB9
(Serial port)
RS 485
(K-Bus)
RS 232
(CEI 870-5)
COURIER
Master Station
KITZ
A-75
MS/M 1.6882-C
EPAC 3100/3500
Current loop (to UR)
Rear view of the EPAC
UR 2000-2
Restitution unit (TPE 2000-2)
VDEW
Rear view of the EPAC
DB9
(Serial port)
Optical fibre
VDEW Master Station
Transmitter
Receiver
A-76
EPAC 3100/3500
MS/M 1.6882-C
EPAC functions / models
EPAC 31xx : Flush panel mounting
EPAC 35xx : Rack panel mounting
Specifications
Distance protection
Five zones of protection
Directional overcurrent start-up
Full range of teleaction schemes
3111 3112 3113 3116 3121 3122 3123 3126 3131 3132 3133 3136
3511 3512 3513 3526 3521 3522 3523 3526 3531 3532 3533 3536
X
X
X
X
X
X
X
X
X
X
X
X
Power-swing tripping
X
X
X
X
X
X
X
X
X
X
X
X
Single or three pole tripping
X
X
X
X
X
X
X
X
X
X
X
X
Directional earth fault (DEF) or IDMT
element for
high resistance earth faults
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
Additional overload, overvoltage
and undervoltage protection
Voltage and check synchronism
functions
Automatic single and/or three-pole
autoreclose
function
X
X
X
X
X
X
X
X
X
X
X
X
Four independent user selectable
setting groups
X
X
X
X
X
X
X
X
X
X
X
X
Fault location
X
X
X
X
X
X
X
X
X
X
X
X
Ten fault reports stored in non-volatile
mass memory
X
X
X
X
X
X
X
X
X
X
X
X
Automatic down-loading of fault
reports to a printer
X
X
X
X
X
X
X
X
X
Oscillography stored in non-volatile
memory
X
X
X
X
X
X
X
X
X
X
X
X
X
IRIG-B input for real-time
clock synchronisation
Substation communications via
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
K-Bus, VDEW or TPE
Front panel LCD display
X
One IO-1board:
8 programmable inputs
16 programmable output contacts
3 tripping contacts
1 fault device contact
X
Two IO-1boards:
16 programmable inputs
32 programmable output contacts
6 tripping contacts
2 circuit breaker reclosing contacts
2 fault device contact
One IO-3board:
8 programmable inputs
13 programmable output contacts
6 tripping contacts
1 fault device contact
Two IO-3 boards:
16 programmable inputs
26 programmable output contacts
6 tripping contacts
2 fault device contact
X
X
X
X
X
X
X
X
X
X
X
X
X
A-77
MS/M 1.6882-C
EPAC 3100/3500
Digital outputs allocation
It is not possible to allocate serveral outputs on one contact except for the following :
-
Phase A tripping
Phase B tripping
Phase C tripping
Single pole trip
Three-phase trip
D.E.F. trip
Weak infeed trip
Fuse failure trip
OR
- Phase A selection
- Phase B selection
- Phase C selection
OR
-
OR
- Unblocking signal transmission
- Unblocking signal transmission for tee line
OR
- Single phase fault
- Multi phase fault
OR
- Carrier send
- Carrier send for tee line
OR
-
OR
- Directional comparison signal
- Directional comparison signal for tee line
OR
- 1 pole reclosing cycle in progress
- 3 pole reclosing cycle in progress
OR
- Min U alarm
- Max U alarm
- Max I alarm
Zone
Zone
Zone
Zone
Zone
1
2
3
4
5
fault
fault
fault
fault
fault
Self test in progress
Urgent alarm
Non urgent alarm
Fuse failure
Power swing detection
A-78
EPAC 3100/3500
MS/M 1.6882-C
BLANK PAGE
MS/M 1.6882-C
EPAC 3100/3500
APPENDIX B
Sofware Version V6
EPAC 3100/3500
MS/M 1.6882-C
BLANK PAGE
%
060&
(3$&
&217(17
3$*(
,1752'8&7,21 BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
%
%
1(:)81&7,216 BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
%
%
&XUUHQW7UDQVIRUPHU6XSHUYLVLRQ &76 BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
%
%
%URNHQ&RQGXFWRU %& BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
%
%
(92/87,2162)(;,67,1*)81&7,216 BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
%
%
B2.1.1.
B2.1.2.
B2.1.3.
'LVWDQFH3URWHFWLRQBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
Overcurrent Starting Supervision ___________________________________________
Zone Reach Control_____________________________________________________
Weak-infeed mode______________________________________________________
%
B-7
B-8
B-9
%
B2.2.1.
B2.2.2.
B2.2.3.
$XWRUHFORVHUBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB %
Discrimination Timer_____________________________________________________ B-9
Recloser Exclusion Logic _________________________________________________ B-10
Prolonged A/R Block control input __________________________________________ B-11
%
27+(502',),&$7,216 BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB %
% 8VHULQWHUIDFH BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB %
B3.1.1. Front panel display______________________________________________________ B-12
B3.1.2. PAS&T _______________________________________________________________ B-12
% $GGLWLRQDOLQSXWVRXWSXWV BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB %
B3.2.1. Control inputs __________________________________________________________ B-12
B3.2.2. Output messages (may be programmed to assert output relays) __________________ B-12
%
'LVWXUEDQFHUHFRUGLQJODEHOV BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB %
%
:LQ(3$&YHUVLRQ BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB %
%
(3$&
060&
3$*(12786('
%
060&
(3$&
,1752'8&7,21
(3$&VHTXLSSHGZLWKVRIWZDUHYHUVLRQ9EHQHILWIURPWKHIROORZLQJLPSURYHPHQWV
7ZRQHZIXQFWLRQVKDYHEHHQLPSOHPHQWHG
- &XUUHQW7UDQVIRUPHU6XSHUYLVLRQ &76
- %URNHQ&RQGXFWRU %&
7KHIROORZLQJH[LVWLQJIXQFWLRQVKDYHEHHQPRGLILHG
- 'LVWDQFH3URWHFWLRQ =RQH5HDFK&RQWURO2YHUFXUUHQW6WDUWLQJ6XSHUYLVLRQ:HDNLQIHHGPRGH
- $XWRUHFORVHU 'LVFULPLQDWLRQ7LPH([FOXVLRQ0RGH3URORQJHG$5%ORFNFRQWUROLQSXW
$GGLWLRQDOLQSXWVRXWSXWVDUHDYDLODEOH
%
(3$&
%
1(:)81&7,216
%
&XUUHQW7UDQVIRUPHU6XSHUYLVLRQ &76
060&
7KH &XUUHQW 7UDQVIRUPHU 6XSHUYLVLRQ IXQFWLRQ LV XVHG WR GHWHFW LQWHUUXSWLRQV RU IDXOWV LQ WKH
FRQQHFWLRQRIWKHDFFXUUHQWLQSXWVWRWKHUHOD\&7RULQWHUFRQQHFWLQJZLULQJRSHQFLUFXLWVUHVXOW
LQ D PLVUHSUHVHQWDWLRQ RI WKH SKDVH FXUUHQWV RQ WKH SRZHU V\VWHP DQG FDXVH DQ LQFRUUHFW
PHDVXUHPHQWRIUHVLGXDOFXUUHQW7KH&76IXQFWLRQGHWHFWVWKHDSSHDUDQFHRIUHVLGXDOFXUUHQW
LQWKHDEVHQFHRIUHVLGXDOYROWDJH
,Q SUDFWLFH WKH FDOFXODWHG UHVLGXDO FXUUHQW DQG YROWDJH DUH FRPSDUHG ZLWK SURJUDPPDEOH
WKUHVKROGV DQG DQ RUGHU LV VHQW LQVWDQWDQHRXVO\ WR EORFN WKH %URNHQ &RQGXFWRU DQG '()
%DFNXS,!SURWHFWLRQIXQFWLRQV
2QH[SLU\RIWKHVHWWDEOHWLPHGHOD\DQDODUPPHVVDJHLVDVVHUWHG7KLVDODUPPHVVDJHPD\
EH SURJUDPPHG WR DVVHUW DQ RXWSXW UHOD\ 7KH DODUP GURSVRII ZKHQ WKH &7 PDOIXQFWLRQ
FRQGLWLRQVWRSV
/RJLFVFKHPH
6HWWLQJV
)URPWKH:LQ(3$&VRIWZDUH
6HOHFWWKHPDLQVHWWLQJVFUHHQ
&OLFNRQWKH0DLQEXWWRQ7KH6HWWLQJV0DLQVFUHHQLVGLVSOD\HG
6HOHFWWKH2WKHUVEXWWRQ
6HOHFWWKH&76WDE7KHVHWWLQJVFUHHQIRU&7VXSHUYLVLRQLVGLVSOD\HG
%
060&
(3$&
)URPWKH(3$&GLVSOD\
7KH&76IXQFWLRQFDQEHDFWLYDWHGXVLQJWKHIROORZLQJSDWK
CONF ØØ PROT Ú
LIGN ØØØØØØØ CTS Ú
Acts
ØVr<
ØIr>
ØTcts
$FWLYDWLRQGHDFWLYDWLRQRI&76IXQFWLRQ
6HWWLQJRIUHVLGXDOYROWDJHWKUHVKROG
6HWWLQJRIUHVLGXDOFXUUHQWWKUHVKROG
6HWWLQJRI&76DODUPDVVRFLDWHGWLPHGHOD\
)URPWKH3URWHFWLRQ$FFHVV6RIWZDUHDQG7RRONLWVRIWZDUH
%
6HOHFWWKH&766(77,1*6FROXPQ
7KH&7VXSHUYLVLRQSDUDPHWHUVDUHGLVSOD\HG
'
&766(77,1*6
'
'
'
'
&76
&76
&76
&76
&76
95
,5!
WDODUP
$FWLYDWLRQGHDFWLYDWLRQRI&76IXQFWLRQ
6HWWLQJRIUHVLGXDOYROWDJHWKUHVKROG
6HWWLQJRIUHVLGXDOFXUUHQWWKUHVKROG
6HWWLQJRI&76DODUPDVVRFLDWHGWLPHGHOD\
%URNHQ&RQGXFWRU %&
7KH%URNHQ&RQGXFWRUIXQFWLRQGHWHFWVEURNHQFRQGXFWRUVLQWKHDEVHQFHRIIDXOWFXUUHQW,IWKH
QHJDWLYH VHTXHQFH FXUUHQWSRVLWLYH VHTXHQFH FXUUHQW UDWLR H[FHHGV D VHWWDEOH WKUHVKROG D
SURJUDPPDEOH WLPHU LV VWDUWHG 2Q H[SLU\ RI WKH VHWWDEOH WLPH GHOD\ DQ DODUP PHVVDJH LV
DVVHUWHG7KLVDODUPPHVVDJHPD\EHSURJUDPPHGWRDVVHUWDQRXWSXWUHOD\
7ULSSLQJRQEURNHQFRQGXFWRUGHWHFWLRQLVVHOHFWDEOH
7KLVIXQFWLRQORFNVRXWWKH'()%DFNXS,!SURWHFWLRQ
,WLVLQKLELWHGE\WKH&76IXQFWLRQLIWKHODWWHUGHWHFWVD&7PDOIXQFWLRQ VHHVHFWLRQ%% /RJLFVFKHPH
%
(3$&
060&
6HWWLQJV
)URPWKH:LQ(3$&VRIWZDUH
6HOHFWWKHPDLQVHWWLQJVFUHHQ
&OLFNRQWKH0DLQEXWWRQ7KH6HWWLQJV0DLQVFUHHQLVGLVSOD\HG
6HOHFWWKH2WKHUVEXWWRQ
6HOHFWWKH%URNHQ&RQGXFWRUWDE7KHVHWWLQJVFUHHQIRUWKH%URNHQ&RQGXFWRUIXQFWLRQLV
GLVSOD\HG
)URPWKH(3$&GLVSOD\
7KH%URNHQ&RQGXFWRUIXQFWLRQFDQEHDFWLYDWHGXVLQJWKHIROORZLQJSDWK
CONF ØØ PROT Ú
LIGN ØØØØØØØØ BRK Ú
Abrk $FWLYDWLRQGHDFWLYDWLRQRI%&IXQFWLRQ
ØDec (QDEOHGLVDEOHWULSSLQJRQEURNHQFRQGXFWRU
GHWHFWLRQ
ØI21> 6HWWLQJRI,,WKUHVKROG
Øtbrk 6HWWLQJRI%&DODUPDVVRFLDWHGWLPHGHOD\
)URPWKH3URWHFWLRQ$FFHVV6RIWZDUHDQG7RRONLWVRIWZDUH
6HOHFWWKH%52.(16(77,1*6FROXPQ
7KH%URNHQ&RQGXFWRUSDUDPHWHUVDUHGLVSOD\HG
(
%52.(16(77,1*6
(
(
(
(
%5. %URNHQ
%5. 7ULS
%5. ,, !
%5. WDODUP
$FWLYDWLRQGHDFWLYDWLRQRI%&IXQFWLRQ
(QDEOHGLVDEOHWULSSLQJRQEURNHQFRQGXFWRUGHWHFWLRQ
6HWWLQJRI,,WKUHVKROG
6HWWLQJRI%&DODUPDVVRFLDWHGWLPHGHOD\
%
060&
%
(92/87,2162)(;,67,1*)81&7,216
%
'LVWDQFH3URWHFWLRQ
(3$&
% 2YHUFXUUHQW6WDUWLQJ6XSHUYLVLRQ
:KHUH97VDUHSODFHGRQWKHEXVEDUVLQVWHDGRIWKHOLQHRSHUDWLRQVRIEXVFRXSOHUVRULVRODWRUV
PD\FDXVHWKHGLVWDQFHSURWHFWLRQWRWULSXQGXO\DVDUHVXOWRIIDOVHORZYROWDJHPHDVXUHPHQW
,Q RUGHU WR DYRLG WKLV D FXUUHQW WKUHVKROG FDQ EH DFWLYDWHG DQG VHW VR WKDW WKH 'LVWDQFH
3URWHFWLRQIXQFWLRQLVHQDEOHGRQO\ZKHQWKHIDXOWFXUUHQWH[FHHGVWKDWWKUHVKROG
6FKHPHORJLF
6HWWLQJV
)URPWKH:LQ(3$&VRIWZDUH
6HOHFWWKHPDLQVHWWLQJVFUHHQ
&OLFNRQWKH0DLQEXWWRQ7KH6HWWLQJV0DLQVFUHHQLVGLVSOD\HG
6HOHFW WKH =RQH 6HWWLQJV EXWWRQ 7KH VHWWLQJ VFUHHQ IRU WKH 'LVWDQFH 3URWHFWLRQ IXQFWLRQ LV
GLVSOD\HG
%
(3$&
060&
)URPWKH(3$&GLVSOD\
7KHRYHUFXUUHQWVXSHUYLVLRQWKUHVKROGFDQEHDFWLYDWHGGHDFWLYDWHGXVLQJWKHIROORZLQJSDWK
CONF ØØ PROT Ú
LIGN Ø SURV ÚØØØØØØØØØØØØØØØØØØØØØØØØØØ ×
AImr $FWLYDWLRQGHDFWLYDWLRQRIRYHUFXUUHQWVXSHUYLVLRQ
ØImr 6HWWLQJRIWKUHVKROG
)URPWKH3URWHFWLRQ$FFHVV6RIWZDUHDQG7RRONLWVRIWZDUH
6HOHFWWKH=21(6(77,1*FROXPQ
7KHGLVWDQFHSURWHFWLRQSDUDPHWHUVDUHGLVSOD\HG
=21(6(77,1*
$
%
=21 ,6WDUW$FWL
=21 ,6WDUW7KU
$FWLYDWLRQGHDFWLYDWLRQRIRYHUFXUUHQWVXSHUYLVLRQ
6HWWLQJRIWKUHVKROG
% =RQH5HDFK&RQWURO
7LPLQJVHTXHQFHIRU=RQH5HDFK&RQWURO
$V IURP VRIWZDUH YHUVLRQ 9 H[WHQGHG ]RQH ; LV UHGXFHG WR ]RQH IRU WKH GXUDWLRQ RI WKH
UHFODLPWLPHLQVWHDGRIWKHGXUDWLRQRIWKHFORVLQJFRPPDQGDVLWLVWKHFDVHLQSUHYLRXV XSWR
9( VRIWZDUHYHUVLRQV
/RJLFVFKHPHIRUWULSSLQJDW7
=RQH5HGXFWLRQLVLQLWLDWHGHLWKHUE\DQH[WHUQDOFRPPDQG =RQH5HGXFWLRQFRQWUROLQSXW RUE\
DQLQWHUQDOLQIRUPDWLRQ 5HFODLP7LPHLQ3URJUHVV %
060&
(3$&
% :HDNLQIHHGPRGH
7KHORJLFVFKHPHRIWKH(FKRORJLFYDOLGDWLRQKDVEHHQPRGLILHGWRWDNHLQWRDFFRXQWWKHQHZ
/LQH2SHQFRQWUROLQSXW
:HDNLQIHHGORJLFVFKHPH
%
$XWRUHFORVHU
7KHLQWHUQDODXWRUHFORVHUVRIWKH(3$&KDYHEHHQPRGLILHGDVIROORZV
% 'LVFULPLQDWLRQ7LPHU
7KLVWLPHULVXVHGIRUVLQJOHSKDVHWULSSLQJVHTXHQFHVRQO\,WVWDUWVZKHQRQHSKDVHRSHQV
- ,I D IDXOW LV GHWHFWHG RQ RQH RU ERWK RI WKH UHPDLQLQJ SKDVHV ZKLOH WKLV WLPHGHOD\ LV LQ
SURJUHVVWKH(3$&VHQGVDWKUHHSKDVHWULSSLQJRUGHUDQGODXQFKHVDWKUHHSKDVHUHFORVLQJ
F\FOH
- ,IDIDXOWLVGHWHFWHGRQRQHRUERWKRIWKHUHPDLQLQJSKDVHVDIWHUWKLVWLPHGHOD\KDVHODSVHG
EXWEHIRUHH[SLU\RIWKHILUVW GHDG WLPH WKH (3$& VHQGV D WKUHHSKDVH WULSSLQJ RUGHU DQG
EORFNVWKHDXWRUHFORVHU
%
(3$&
060&
6HWWLQJV
7KLVWLPHGHOD\FDQEHVHWIURPWRVLQVWHSVRIV,WVKRXOGEHVKRUWHURUHTXDOWRWKH
ILUVWGHDGWLPHVHWWLQJ
)URPWKH:LQ(3$&VRIWZDUH
6HOHFWWKHPDLQVHWWLQJVFUHHQ
&OLFNRQWKH2SWLRQVEXWWRQ7KH6HWWLQJV2SWLRQVVFUHHQLVGLVSOD\HG
6HOHFWWKH$XWRUHFORVHUEXWWRQ7KHVHWWLQJVFUHHQIRUWKH$XWRUHFORVHULVGLVSOD\HG
)URPWKH(3$&GLVSOD\
7KHDXWRUHFORVHUGLVFULPLQDWLQJWLPHUFDQEHVHWWKHIROORZLQJSDWK
CONF ØØ PROT Ú
LIGN ØØØØØØØØØØØ ARC Ú
Tcrm ØØØØØØØØØ
tdrc
6HWWLQJRIGLVFULPLQDWLRQWLPHU
)URPWKH3URWHFWLRQ$FFHVV6RIWZDUHDQG7RRONLWVRIWZDUH
6HOHFWWKH$8725(&/26(56(77,1*6FROXPQ
7KH$XWRUHFORVHUSDUDPHWHUVDUHGLVSOD\HG
(
$8725(&/26(56(77,1*6
$
$7& 7GLVFULP
6HWWLQJRIGLVFULPLQDWLRQWLPHU
% 5HFORVHU([FOXVLRQ/RJLF
7KLV RSHUDWLQJ PRGH LV XVHG ZKHQ WKHUH LV D VHFRQG DXWRUHFORVLQJ GHYLFH RQ WKH IHHGHU ,W
DOORZVWKHDXWRUHFORVHUWKDWVWDUWVILUVWWRORFNRXWWKHRWKHU7KH(3$&KDVD5HFORVHUH[FOXVLRQ
FRQWURO LQSXW WR ORFNRXW LWV LQWHUQDO DXWRUHFORVHUV DQG DQ ([FOXGH UHFORVHU FRQWDFW RXWSXW WR
ORFNRXWWKHVHFRQGDXWRUHFORVLQJGHYLFH
,IWKHLQSXWLVDVVHUWHGZKHQWKHWULSFRPPDQGKDVH[SLUHGLWLVLJQRUHG
%
060&
(3$&
/RJLFVFKHPHIRU$5([FOXVLRQRXWSXW
7LPLQJVHTXHQFHIRU5HFORVHU([FOXVLRQLQSXW
% 3URORQJHG$5%ORFNFRQWUROLQSXW
7KLVLQSXWLVW\SLFDOO\XVHGIRUPDLQWHQDQFHZKHUHDXWRUHFORVLQJLVQRWGHVLUHGGXULQJWHVWLQJ
:KLOHWKLVLQSXWLVDVVHUWHGWKHDXWRUHFORVHULVEORFNHGDQGUHPDLQVVRIRUVHFRQGVDIWHUWKH
DVVHUWLRQ LV UHPRYHG IURP WKH LQSXW 'XULQJ WKLV WLPH WKH (3$& ZLOO WULS WKUHHSKDVH RQ DOO
IDXOWVLQFOXGLQJVLQJOHSKDVHIDXOWVDQGDQ3URORQJHG$5%ORFNDODUPLVLVVXHG7KLVDODUPLV
UHVHWVHFRQGVDIWHUWKHDVVHUWLRQLVUHPRYHGIURPWKHLQSXW
,IWKHLQSXWLVUHDVVHUWHGGXULQJWKHVHFRQGWLPHUWKHWLPHULVUHVHW
7LPLQJVHTXHQFHIRU3URORQJHG$5%ORFNLQSXW
%
(3$&
%
27+(502',),&$7,216
%
8VHULQWHUIDFH
060&
% )URQWSDQHOGLVSOD\
7KHYDOXHVRIPHDVXUHGFXUUHQWVDQGYROWDJHVDUHGLVSOD\HGLQSULPDU\$PSVDQGNLOR9ROWV
% 3$6 7
7KHFDOFXODWHGDFWLYHSRZHULVGLVSOD\HGLQVLJQHGYDOXH
%
$GGLWLRQDOLQSXWVRXWSXWV
% &RQWUROLQSXWV
5HFORVHUH[FOXVLRQ
8VHGZKHQWKHUHLVDVHFRQGDXWRUHFORVLQJGHYLFHIRUWKHFLUFXLWEUHDNHU7KLVRXWSXWORFNVRXW
WKHLQWHUQDODXWRUHFORVHUV VHHVHFWLRQ%%
3URORQJHG$5%ORFN
%ORFNV WKH LQWHUQDO DXWRUHFORVHUV IRU DV ORQJ DV LW LV DVVHUWHG VHFRQGV VHH VHFWLRQ
%%
5HVHW/('V
5HPRWHFRPPDQGWRUHVHWWKH7ULS/('RQWKHIURQWSDQHORIWKHUHOD\
/LQH2SHQ
$FWLYDWHVWKH(FKRORJLFRIWKH:HDNLQIHHGPRGH VHHVHFWLRQ%% DQGEORFNVWKH7ULSRQ
5HFORVH 725 IXQFWLRQ
% 2XWSXWPHVVDJHV PD\EHSURJUDPPHGWRDVVHUWRXWSXWUHOD\V
([FOXGHUHFORVHU
8VHGZKHQWKHUHLVDVHFRQGDXWRUHFORVLQJGHYLFHIRUWKHFLUFXLWEUHDNHU7KLVRXWSXWORFNVRXW
WKHRWKHUDXWRUHFORVHU VHHVHFWLRQ%%
3URORQJHG$5%ORFNDODUP
,QGLFDWHVWKDWWKHLQWHUQDO$5LVEORFNHGE\WKHFRUUHVSRQGLQJFRQWUROLQSXW VHHVHFWLRQ%%
&XUUHQWWUDQVIRUPHUVDODUP
,QGLFDWHVDIWHUDVHWWDEOHWLPHGHOD\DFXUUHQWWUDQVIRUPHUPDOIXQFWLRQ VHHVHFWLRQ%%
%URNHQFRQGXFWRUDODUP
,QGLFDWHVDIWHUDVHWWDEOHWLPHGHOD\DEURNHQFRQGXFWRUFRQGLWLRQRQWKHOLQH VHHVHFWLRQ%%
7HODSVHG
$VVHUWHGXSRQH[SLU\RIVWHSWLPHGHOD\DQGUHVHWVZKHQWKHIDXOWGLVDSSHDUV
7HODSVHG
$VVHUWHGXSRQH[SLU\RIVWHSWLPHGHOD\DQGUHVHWVZKHQWKHIDXOWGLVDSSHDUV
6WHSWLPHUVUXQQLQJ
$VVHUWHGZKHQGLVWDQFHSURWHFWLRQVWHSWLPHUVVWDUWDQGUHVHWZKHQDOOVWHSWLPHUVUHVHW
%
060&
(3$&
,QVWDQWDQHRXVIXVHIDLOXUHDODUP
,QGLFDWHVWKDWDIXVHIDLOXUHKDVEHHQGHWHFWHGEXWLVQRW\HWFRQILUPHGE\ORJLF VHH&KDSWHU
VHFWLRQ)XVH)DLOXUH'HWHFWLRQDQGHPHUJHQF\RYHUFXUUHQWSURWHFWLRQ
%
(3$&
%
060&
'LVWXUEDQFHUHFRUGLQJODEHOV
&RQWUROLQSXWVDVVLJQDEOHWRFRQWDFWVRI,2DQG,2ERDUGV
/DEHORQ
GLVSOD\
/DEHORQ:LQ(3$&00,
:LQ(3$&
VFUHHQ
'LVWXUEDQFHUHFRUGLQJ
1
73(ODEHO
GHFD
3+$6($75,3
76
$75,33,1*%<$5
GHFE
3+$6(%75,3
76
%75,33,1*%<$5
GHFF
3+$6(&75,3
76
&75,33,1*%<$5
%DQW
$/:$<675,33+$6(
76
,1*(1(375,3
'H36
%$&.833527(&7,2175,3
76
%$&.8335275,3
(QG
&%0$18$/&/26(
76
&/26,1*6,*1$/
5HFH
&$55,(55(&(,9(
76
&$55,(55(&(,9('
5HFS
&$55,(55(&(,9()257((/,1(
76
7((/1&$55(&
9SUW
%/2&.3527(&7,21
76
3527(&7/2&.
SKGH
+)35(6(1781%/2&.
76
+)81/2&.5(&
SKGS
+)35(6(177((81%/2&.
76
7((+)81/25(&
5HGX
=21(5('8&7,21
76
=21(5('8&7,21
5HGH
6,*1$/5(&(,9('()
76
'()&$55,(55(&
5HGS
6,*1$/5(&(,9('()7((/,1(
76
7(('()&$55(&
EDUF
$8725(&/26(5/2:35(6685(
76
$5&,168)35(668
LDUF
5(&/26,1*,03266,%/(
76
$5&,03266,%/(
DUFQ
$8725(&/26(5(1$%/('
76
$5&215(&
DUFI
$8725(&/26(5',6$%/('
76
$5&2))5(&
F\PQ
3+$6(&<&/($8725(&/26(
76
$5&6,1*/(&<&/(
([$U
5(&/26(5(;&/86,21
76
$5(;&/86,21
%$UW
352/21*('$5%/2&.
76
7%/2&.,1*$5
GLVF
32/(6',6&5(3$1&<
76
32/(',6&5(3
GLVM
&%&/26('
76
&%&/26('
/2XY
/,1(23(1
76
23(1('/,1(
)IXV
/,1()86()$,/85(
76
,1)86()$,/85(
IXVE
%86%$5)86()$,/85(
76
%$597)86)$,/
3HUW
',6785%$1&(5(&25'(567$57
76
',6785%5(&25'
5/HG
5(6(7/('6
76
/('65(6(7
FIJ
6(77,1**5283&+$1*(%,7
76
6:,7&+%,75(&
FIJ
6(77,1**5283&+$1*(%,7
76
6:,7&+%,75(&
:LQ73(DQG&285,(5+0, VDVVLJQDQXPEHUWRHDFKGLVWXUEDQFHGLJLWDOVLJQDOVHQWE\WKH(3$&
)RU LQVWDQFH LI FRQWURO LQSXWV &DUULHU UHFHLYH 1 SKDVH F\FOH DXWRUHFORVH 1 DQG FRQWDFW
RXWSXWV&DUULHUVHQG 1 3RZHUVZLQJGHWHFWLRQ 1 DUHVHWWRVWDUWWKHGLVWXUEDQFHUHFRUGHUWKH\
DUHVRUWHGDFFRUGLQJWRWKHLUQXPEHUDQGWKXVKDYHWKHIROORZLQJODEHOV
,QSXWRXWSXW
:LQ73(ODEHO
&285,(5ODEHO
&$55,(55(&(,9(
3+$6(&<&/($8725(&/26(
&$55,(56(1'
32:(56:,1*'(7(&7,21
/2*1&$55,(55(&(,9('
/2*1$5&6,1*/(&<&/(
/2*1&$55,(56(17
/2*13:56:,1*'(7
',*,7$/B*53B
',*,7$/B*53B
',*,7$/B*53B
',*,7$/B*53B
%
060&
(3$&
2XWSXWPHVVDJHVDVVLJQDEOHWRFRQWDFWVRI,2,2DQG,2ERDUGV
/DEHO
RQ/&'
/DEHORQ:LQ(3$&00,
:LQ(3$& 'LVWXUEDQFHUHFRUGLQJ
VFUHHQ 1
73(ODEHO
'HF$
3+$6($75,3
7&
$75,33,1*
'HF%
3+$6(%75,3
7&
%75,33,1*
'HF&
3+$6(&75,3
7&
&75,33,1*
'HF0
6,1*/(32/(75,3
7&
6,1*/(32/(75,3
'HF
7+5((3+$6(75,3
7&
7+5((32/(675,3
EDQW
$/:$<675,33+$6(
7&
*(1(5$/375,3
6HO$
3+$6($6(/(&7,21
7&
$6(/(&7,21
6HO%
3+$6(%6(/(&7,21
7&
%6(/(&7,21
6HO&
3+$6(&6(/(&7,21
7&
&6(/(&7,21
$YDO
)25:$5'',5(&7,21$/
7&
)25:$5')$8/7
=
=21()$8/7
7&
=21(
=
=21()$8/7
7&
=21(
=
=21()$8/7
7&
=21(
=
=21()$8/7
7&
=21(
=
=21()$8/7
7&
=21(
7
7(/$36('
7&
7(/$36('
7
7(/$36('
7&
7(/$36('
7VWG
67(37,0(565811,1*
7&
67(37,0(56581
0UR
3527(&7,2167$5783
7&
67$5783
3RO\
08/7,3+$6()$8/7
7&
08/7,3+$)$8/7
0RQR
6,1*/(3+$6()$8/7
7&
6,1*/3+$)$8/7
7HOH
&$55,(56(1'
7&
&$55,(56(17
7HOS
&$55,(56(1')257((/,1(
7&
7((/1&$56(17
'ZHD
:($.,1)(('75,3
7&
:($.,1)((75,3
'SRP
32:(56:,1*'(7(&7,21
7&
3:56:,1*'(7
9SUR
3527(&7,21%/2&.('
7&
3527%/2&.,1*
'YHU
81%/2&.,1*6,*1$/75$160,66,21
7&
81/2&.6(17
'YHS
81%/2&.,1*6,*1$/75$160,66,21)257((/,1( 7&
7((/181/2&6(
$PR
5(9(56(',5(&7,21$/
7&
5(9(56()$8/7
7HGH
',5(&7,21$/&203$5,6216,*1$/
7&
'()&$55,(56(
7HGS
',5(&7,21$/&203$5,6216,*1$/)257((/,1( 7&
7(('()&$56(
GGHI
'()75,3
7&
'()75,3
$YWS
'(/$<(')25:$5'($57+)$8/7
7&
'(/$<)25:)$8/7
$PWS
'(/$<('5(9(56(($57+)$8/7
7&
'(/$<%$&.)$8/7
5XSW
%52.(1&21'8&725
7&
%52.(1&21'8&725
DPQX
0,18$/$50
7&
0,18$/$50
DP[X
0$;8$/$50
7&
0$;8$/$50
DP[L
0$;,$/$50
7&
0$;,$/$50
'HI7
($57+)$8/7
7&
3+72*5)$8/7
$OLP
&855(1775$16)250(56$/$50
7&
&76$/$50
3)IXV
,167$17$1(286)86()$,/85(
7&
0&%$/$50
)IXV
)86()$,/85(
7&
)86()$,/85(
'HF)
)86()$,/85(75,3
7&
)86()$,/75,3
%
(3$&
060&
$U2Q
$8725(&/26(521
7&
$5(1$%/('
$U2I
$8725(&/26(52))
7&
$5',6$%/('
DXWV
$8725(&/26((1$%/('%<6<1&+&+(&.
7&
$87+25)5206&
GHIV
92/7$*()$8/7%<6<1&+&+(&.
7&
)$8/792/76&
EODU
5(&/$,07,0(,1352*5(66
7&
$5&%/2&.,1*
%$U6
%$&.83$8725(&/26(5%/2&.('
7&
$5%/2&.,1*%5
FPRQ
32/(5(&/26,1*&<&/(,1352*5(66
7&
$5&6,1*/(&<&/(
FWUL
32/(5(&/26,1*&<&/(,1352*5(66
7&
$5&7+5((&<&/(
9DUF
$8725(&/26(5%/2&.,1*
7&
5(&/26/2&.,1*
([$U
(;&/8'(5(&/26(5
7&
$5(;&/86,21
%$UW
352/21*('$5%/2&.
7&
7%/2&.,1*$5
HQF
5(&/26,1*6,*1$/
7&
5(&/26,1*25'(5
$XWR
6(/)7(67,1352*5(66
7&
6(/)7(67
$OXU
85*(17$/$50
7&
85*(17$/$50
$OQX
12185*(17$/$50
7&
12185*$/$50
FIJ
6(77,1**5283&+$1*(%,7
7&
5(6:,7&+%,7
FIJ
6(77,1**5283&+$1*(%,7
7&
5(6:,7&+%,7
%
060&
%
(3$&
:LQ(3$&YHUVLRQ
:LQGRZVDQGFRPSDWLEOH+0,IRU(3$&
:LQ(3$&YHUVLRQFDQEHXVHGZLWKERWK(3$&VRIWZDUHYHUVLRQV9DQG9
,W UHFRJQLVHV DXWRPDWLFDOO\ WKH SURGXFW VRIWZDUH YHUVLRQ ZKHQ D FRQILJXUDWLRQ LV GRZQORDGHG
IURPWKH(3$&
EXWWRQ:LQ(3$&GLVSOD\VZLQGRZVWKDWDOORZV\RXWRVHOHFWWKH
:KHQ\RXVHOHFWWKH
SURGXFWYHUVLRQWKDWWKHFRQILJXUDWLRQLVWREHSUHSDUHGIRU
7KHUHDIWHUWKH(3$&VRIWZDUHYHUVLRQLVDOZD\VGLVSOD\HGDWWKHWRSOHIWRIDOOVFUHHQVDVZHOODV
WKHVHWWLQJJURXSWKDWLVEHLQJFUHDWHG
"
$ &21),*85$7,216(77,1* *5283 &5($7(' )25
21(9(56,21 0$< %( /2$'(' 21/< ,172 (3$&6 2)
7+(6$0(62)7:$5(9(56,21