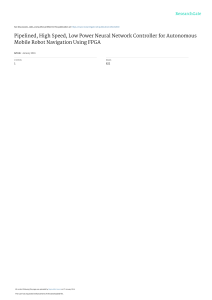
International Journal of Mechanical Engineering and Technology (IJMET) Volume 9, Issue 5, May 2018, pp. 821–824, Article ID: IJMET_09_05_090 Available online at http://www.iaeme.com/ijmet/issues.asp?JType=IJMET&VType=9&IType=5 ISSN Print: 0976-6340 and ISSN Online: 0976-6359 © IAEME Publication Scopus Indexed AUTONOMOUS AND INTELLIGENT ROBOT FOR OBSTACLE AVOIDING AND ANTIFALLING USING ULTRASONIC SENSORS M. Haidas, B. Kadri and C. Benachaiba Faculty of Technology, Laboratory of FABLAB, University of Tahri Mohammed Béchar, UTMB. Algeria ABSTRACT Robots are used on multi-domain, where their conception requires a big study as like in microcontrollers, sensors and code programming. Arduino with their shields had given a solution for many problems because of their simplicity in electronic exploitation, mostly in robotics. In this paper, we present a solution when the mobile robot avoiding obstacle it cannot fall by using two ultrasonic sensors, Arduino uno, Servo motor and Arduino motor shield Rev3. The first ultrasonic sensor is designed to measure the vertical distance from the sensor itself to sol and the second is to measure the horizontal distance from robot to avoiding obstacle. Our objective is to build an autonomous and intelligent robot. Keywords: Robot, Anti falling, Obstacle, ultrasonic sensor, Arduino. Cite this Article: M. Haidas, B. Kadri and C. Benachaiba, Autonomous and Intelligent Robot for Obstacle Avoiding and Anti-Falling Using Ultrasonic Sensors, International Journal of Mechanical Engineering and Technology, 9(5), 2018, pp. 821–824 http://www.iaeme.com/IJMET/issues.asp?JType=IJMET&VType=9&IType=5 1. INTRODUCTION The sensors in the robotic systems have a very important role especially to make a very precise and difficult task like the so-called ultrasonic sensor HC-SR04 [1] that measures the distance. In our robot, we use this sensor for two purposes, one to avoid obstacles ahead and the second to avoid falls. These types of sensors based on sound speed in air, which is 340 m/s at 25° C. The programming code developed in the Arduino [1], [2], [3], [4] microcontroller is for a goal to make the Robot autonomous and intelligent. 2. PROPOSED ROBOT DESIGN The proposed robot design and realization with all components is showen in figure 1. The two DC Motors are driven by Arduino Motor Shield Rev3 [5],where the special movements for our robot are go forward, backward, turn left, turn right and stop. http://www.iaeme.com/IJMET/index.asp 821 editor@iaeme.com Autonomous and Intelligent Robot for Obstacle Avoiding and Anti-Falling Using Ultrasonic Sensors Figure 1 shows the photograph of our robot 3. ROBOT OBSTACLE AVOIDING The principal detection of the obstacle illustrated in figure 2 is done by upper ultrasonic sensor where it sends a trigger signal and receive echo signal during a time. The distance model calculated from the robot to the obstacle is demonstrating on programming code showed in figure 3. Figure 2 shows the Robot obstacle avoiding Figure 3 shows the Ultrasonic sensor’s distance measure In figure 4, we present an algorithm for movements of the robot on avoiding obstacles, where the part that contains random [6] instruction, it is for arbitrary choosing to turn right or left. http://www.iaeme.com/IJMET/index.asp 822 editor@iaeme.com M. Haidas, B. Kadri and C. Benachaiba Figure 4 shows algorithm for the Robot on obstacle avoiding 4. ROBOT FALL AVOIDING In figure 5, Lower ultrasonic sensor does the principal detection of the fall, and the algorithm is illustrated in figure 6. Figure 5 shows the robot on anti-falling Figure 6 shows algorithm for the Robot on anti-falling 5. ROBOT OBSTACLE AVOIDING AND ANTI-FALLING In this case, we combine between robot obstacle avoidance and anti-falling to obtain an autonomous and intelligent robot. http://www.iaeme.com/IJMET/index.asp 823 editor@iaeme.com Autonomous and Intelligent Robot for Obstacle Avoiding and Anti-Falling Using Ultrasonic Sensors Figure 7 shows the robot on obstacle avoiding and anti-falling 6. CONCLUSION The obstacles and the fall present a difficulty and a danger in the path traversed by the robots. In this paper, we present an autonomous and intelligent robot for obstacle avoiding and antifalling. REFERENCES [1] [2] [3] [4] [5] [6] [7] [8] [9] Karvinen Tero, Karvinen Kimmo and Valtokari Ville. Les capteurs pour Arduino et Raspberry Pi. Edition Dunod, 2014. Erik Bartmann. LE GRAND LIVRE D’ARDUINO. 2e édition Eyrolles, 2015. Simon Monk. Mouvement, limière et son avec ARDUINO et RASPBERRY PI. Edition Eyrolles, 2016. Christian Tavernier. Arduino Maitraisez sa programmation et ses cartes d’interface (shields). 2e édition Dunod, 2014. https://create.arduino.cc/projecthub/Arduino_Genuino/mkr1000-wifi-robot-76a3a0. https://www.arduino.cc/reference/en/language/functions/random-numbers/random/. V. Sudharsan, Ghayathri Suriyamoorthy, R. Jane Valentina, P. Hari Priya and M. Subha Lakshmi, Hardware Efficient Realization of an Autonomous Robot with UART based Control for Navigating Static & Dynamic Obstacles, International Journal of Mechanical Engineering and Technology, 9(3), 2018, pp. 837–845. R. A. Balsara, S. S. Sardar, A. J. Jain and Prof. S.P. Joshi, Design of an Autonomous Robot Security System Using Neural Networks. International Journal of Computer Engineering & Technology, 8(2), 2017, pp.68–75 V. Sudharsan, A.P. Roger Rozario and J. Christob Arputharaj, Design and Analysis of a CORDIC Based Autonomous Robot for Obstacle Avoidance in a Static Indoor Environment. International Journal of Electrical Engineering & Technology, 8(2), 2017, pp. 93–100. http://www.iaeme.com/IJMET/index.asp 824 editor@iaeme.com