Sistema Mecánico
Segunda Ley de Newton: La fuerza total es la suma vectorial de todas las fuerzas
ejercidas en el sistema.
𝑦(𝑡) = 𝐹𝑢𝑒𝑟𝑧𝑎 𝑒𝑛𝑡𝑟𝑎𝑑𝑎 + 𝐹𝑢𝑒𝑟𝑧𝑎 𝑟𝑒𝑠𝑜𝑟𝑡𝑒 + 𝐹𝑢𝑒𝑟𝑧𝑎 𝑎𝑚𝑜𝑟𝑡𝑖𝑔𝑢𝑎𝑑𝑜𝑟
𝑑2 𝑥
Fuerza de entrada: 𝐹(𝑡) = 𝑚 ∗ 𝑎 = 𝑚 ∗ 𝑑𝑡 2
Fuerza del resorte: 𝑘 ∗ 𝑥(𝑡)
Fuerza del amortiguador: 𝑏 ∗ 𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 = 𝑏
𝑦(𝑡) = 𝑚 ∗
𝑑𝑥
𝑑𝑡
𝑑2 𝑥
𝑑𝑥
+𝑏
+ 𝑘 ∗ 𝑥(𝑡)
2
𝑑𝑡
𝑑𝑡
Transformada de Laplace
𝑌(𝑠) = 𝑚 ∗ 𝑠 2 𝑋(𝑠) + 𝑏 ∗ 𝑠𝑋(𝑠) + 𝑘 ∗ 𝑋(𝑠)
𝑌(𝑠) = [𝑚 ∗ 𝑠 2 + 𝑏 ∗ 𝑠 + 𝑘]𝑋(𝑠)
Al generar una fuerza neta Y(s) se produce un desplazamiento en X(s)
𝑋(𝑠)
1
=
= 𝐺(𝑠)
2
𝑌(𝑠) 𝑚 ∗ 𝑠 + 𝑏 ∗ 𝑠 + 𝑘
Respuesta en el tiempo
𝑔(𝑡) = ℒ −1 {
𝑚∗
𝑠2
1
}
+𝑏∗𝑠+𝑘
Raices de la ecuacion: 𝑚 ∗ 𝑠 2 + 𝑏 ∗ 𝑠 + 𝑘
𝑟1 =
−𝑏+√𝑏2 −4𝑚𝑘
2𝑚
; 𝑟2 =
𝑔(𝑡) = ℒ −1 {
−𝑏−√𝑏2 −4𝑚𝑘
2𝑚
1
}
(𝑠 − 𝑟1 )(𝑠 − 𝑟2 )
Fracciones Parciales
1
𝐴
𝐵
=
+
(𝑠 − 𝑟1 )(𝑠 − 𝑟2 ) 𝑠 − 𝑟1 𝑠 − 𝑟2
1
𝐴(𝑠 − 𝑟2 ) + 𝐵(𝑠 − 𝑟1 )
=
(𝑠 − 𝑟1 )(𝑠 − 𝑟2 )
(𝑠 − 𝑟1 )(𝑠 − 𝑟2 )
1 = 𝐴𝑠 − 𝐴𝑟2 + 𝐵𝑠 − 𝐵𝑟1
1 = 𝑠(𝐴 + 𝐵) + (−𝐴𝑟2 − 𝐵𝑟1 )
𝑆1: 𝐴 + 𝐵 = 0
𝐴 = −𝐵
:
𝑆 0 : −1 = 𝐴𝑟2 + 𝐵𝑟1 : 𝐴𝑟2 − 𝐴𝑟1 = −1 : 𝐴(𝑟1 − 𝑟2 ) = 1
𝐴=
𝑚
√𝑏2 −4𝑚𝑘
:
𝐵=−
𝑔(𝑡) = ℒ −1 {
𝑔(𝑡) = 𝐴ℒ −1 {
𝑚
√𝑏2 −4𝑚𝑘
𝐴
𝐴
−
}
𝑠 − 𝑟1 𝑠 − 𝑟2
1
1
} − 𝐴ℒ −1 {
}
𝑠 − 𝑟1
𝑠 − 𝑟2
𝑔(𝑡) = 𝐴 [ℒ −1 {
1
1
} − ℒ −1 {
}]
𝑠 − 𝑟1
𝑠 − 𝑟2
𝑔(𝑡) = 𝐴[𝑒 𝑟1 𝑡 − 𝑒 𝑟2 𝑡 ]
𝑔(𝑡) =
𝑔(𝑡) =
Usando sinh(𝑥) =
𝑚
√𝑏 2 − 4𝑚𝑘
𝑚
[𝑒
−𝑏+√𝑏2 −4𝑚𝑘
𝑡
2𝑚
𝑏
√𝑏 2 − 4𝑚𝑘
𝑒 −2𝑚𝑡 [𝑒
−𝑒
√𝑏2 −4𝑚𝑘
𝑡
2𝑚
−𝑏−√𝑏2 −4𝑚𝑘
𝑡
2𝑚
]
−𝑒
−√𝑏2 −4𝑚𝑘
𝑡
2𝑚
]
𝑒 𝑥 −𝑒 −𝑥
2
𝑏𝑡
2𝑚 𝑒 −2𝑚 𝑠𝑖𝑛ℎ (
𝑔(𝑡) =
√𝑏 2 − 4𝑚𝑘
𝑡)
2𝑚
√𝑏 2 − 4𝑘𝑚
Sistema Eléctrico
Circuito RLC
Utilizando la ley de mallas de Kirchoff
−𝑣𝑖𝑛 (𝑡) + 𝑣𝑅 (𝑡) + 𝑣𝐿 (𝑡) + 𝑣𝐶 (𝑡) = 0
−𝑣𝑖𝑛 (𝑡) + 𝑅 × 𝑖(𝑡) + 𝐿
𝑑𝑖(𝑡) 1 𝑡
+ ∫ 𝑖(𝑡)𝑑𝑡 = 0
𝑑𝑡
𝐶 0
−𝑉(𝑠) + 𝑅 × 𝐼(𝑠) + 𝑠𝐿 × 𝐼(𝑠) +
𝐼(𝑠) [𝑅 + 𝑠𝐿 +
𝐺(𝑠) =
𝑔(𝑡) =
𝑖(𝑡)
1
= ℒ −1 {𝐺(𝑠)} = ℒ −1 {
}
1
𝑣𝑖𝑛 (𝑡)
𝑅 + 𝑠𝐿 + 𝑠𝐶
1
𝑅 + 𝑠𝐿 + 𝑠𝐶
1
=
𝐿
ℒ
−1
𝑠𝐶
=
𝑠 2 𝐿𝐶 + 𝑠𝑅𝐶 + 1
1
𝑠
= (
2
2) =
𝑅
1
𝐿
𝑅
1
𝑅
2
𝐿𝐶 (𝑠 + 𝑠 𝐿 + 𝐿𝐶 )
(𝑠 + 2𝐿) + 𝐿𝐶 − (2𝐿)
𝑅
2𝐿
2
𝑅 2
1
𝑅2
(𝑠 + ) + (√ − 2 )
2𝐿
𝐿𝐶 4𝐿 )
(
𝑅
𝑠 + 2𝐿
2
𝑅 2
1
𝑅2
(𝑠 + 2𝐿) + (√𝐿𝐶 − 2 )
4𝐿 )
{ (
𝑔(𝑡) =
=
𝑠𝐶
𝑠+
1
𝐿
1
] = 𝑉(𝑠)
𝑠𝐶
𝐼(𝑠)
1
=
𝑉(𝑠) 𝑅 + 𝑠𝐿 + 1
𝑠𝐶
1
=
1
𝐼(𝑠) = 0
𝑠𝐶
1 𝑅
− ×
𝐿 2𝐿
1 𝑅
− ×
𝐿 2𝐿
1
2
𝑅 2
1
𝑅2
(𝑠 + ) + (√ − 2 )
2𝐿
𝐿𝐶 4𝐿 )
(
1
2
𝑅 2
1
𝑅2
(𝑠 + 2𝐿) + (√𝐿𝐶 − 2 )
4𝐿 )}
(
= 𝑔(𝑡)
𝑅
𝑖(𝑡)
1 𝑅
1
𝑅2
𝑅
1
𝑅2
= 𝑒 −2𝐿 × cos [(√ − 2 ) 𝑡] − 2 𝑒 −2𝐿 × sin [(√ − 2 ) 𝑡]
𝑣𝑖𝑛 (𝑡) 𝐿
𝐿𝐶 4𝐿
2𝐿
𝐿𝐶 4𝐿
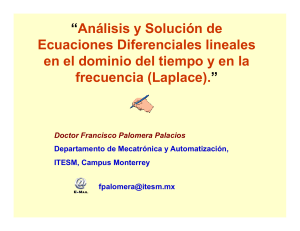
Sistema de Fluidos
Datos del ejercicio
qo = caudal de entrada, en m3 / s
q = caudal de salida, en m3 / s.
h = nivel de líquido, en m.
R = resistencia a la salida
A = área de sección transversal del tanque, m2
V = volumen de líquido en el tanque, m3
Suponiendo que tiene un flujo laminar, se puede considerar un sistema lineal, En este caso la
resistencia al caudal de salida es lineal y estará dado por:
𝑞0 = 𝑅ℎ
El sistema debe mantener constante el nivel de líquido en el tanque para lo cual debe regular
el caudal de entrada. Por lo tanto, la función de transferencia debe relacionar en el dominio de
Laplace el nivel de líquido al caudal de entrada.
𝐺(𝑠) =
𝐻(𝑠)
𝑄(𝑠)
Haciendo un balance de materiales al estado no estacionario
entrada – salida = acumulación
𝑞 − 𝑞0 =
𝑑𝑉
𝑑𝑡
Sabiendo que
𝑉 = 𝐴ℎ ; 𝑑𝑉 = 𝐴𝑑ℎ ; 𝑞0 =
𝑞 − 𝑞0 = 𝑞 −
ℎ
𝑅
ℎ
𝑑ℎ
𝑑ℎ
=𝐴
; 𝐴𝑅
+ ℎ = 𝑅𝑞
𝑅
𝑑𝑡
𝑑𝑡
definiendo la constante de tiempo, AR =
𝜏
𝑑ℎ𝑠
+ ℎ𝑠 = 𝑅𝑞𝑠 = 0
𝑑𝑡
donde
hs = nivel de líquido en el estado estacionario
qs = caudal de entrada en el estado estacionario
Definiendo las variables de desviación
𝜏
𝑑(ℎ − ℎ𝑠 )
+ (ℎ − ℎ𝑠 ) = 𝑅(𝑞 − 𝑞𝑠 )
𝑑𝑡
Las variables de desviación están dadas por:
(h – hs) = H
(q – qs) = Q
Entonces:
𝜏
𝑑𝐻
+ 𝐻 = 𝑅𝑄
𝑑𝑡
Realizando la transformada de Laplace, se tiene
𝜏[𝑠𝐻(𝑠) – 𝐻(0)] + 𝐻(𝑠) = 𝑅 𝑄(𝑠)
Sabiendo que H(0) = 0
𝜏 𝑠𝐻(𝑠) + 𝐻(𝑠) = 𝑅 𝑄(𝑠)
𝐻(𝑠) [𝜏𝑠 + 1] = 𝑅 𝑄(𝑠)
Función de transferencia que relaciona el nivel de líquido al caudal de entrada
𝐺(𝑠) =
𝐻(𝑠)
𝑅
=
𝑄(𝑠) 𝜏𝑠 + 1
Respuesta en el tiempo
𝑔(𝑡) = ℒ −1 {
𝑔(𝑡) = ℒ −1 {
𝑅
𝑅
} = ℒ −1 {
}
𝜏𝑠 + 1
𝐴𝑅𝑠 + 1
𝑅
1
1
1
} = ℒ −1 {
} = ℒ −1 {
}
1
1
1
𝐴
𝐴𝑅(𝑠 +
)
𝐴(𝑠 +
)
𝑠+
𝐴𝑅
𝐴𝑅
𝐴𝑅
𝑔(𝑡) =
1 1𝑡
(𝑒 𝐴𝑅 )
𝐴