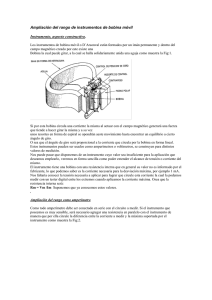
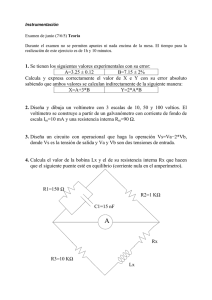
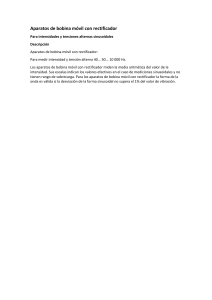
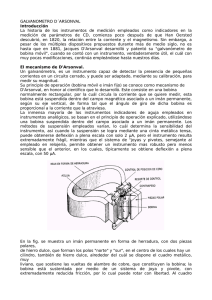
UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi 3 Instrumentos electrodinámicos. 3.1 Galvanómetros Un galvanómetro es un dispositivo electromecánico en el cual se produce un par útil como resultado de la interacción entre una corriente eléctrica, que pasa por la bobina del instrumento y del campo magnético existente en el medio ambiente de la bobina. Existen muchos tipos diferentes de galvanómetros. Nosotros estudiaremos el galvanómetro de d'Arsonval que pertenece al tipo de bobina móvil e imán permanente (IPBM). Las propiedades más destacadas de este movimiento son las siguientes: • Muy bajo consumo de potencia. • Requiere de baja corriente para la deflexión a plena escala (Ifsd). • La operación del instrumento está relativamente libre de efectos de campos magnéticos parásitos. • Escala uniforme. • Amplio margen de sensibilidad. • Características dinámicas que permite una rápida velocidad de respuesta a un cambio dado en la corriente, y la capacidad de ser amortiguado críticamente. • Bajo costo. 3.1.1 Descripción del movimiento Figura 3-1 Figura 3-2 En las Fig. 3-1 y 3-2 se muestran dos versiones diferentes del instrumento de d'Arsonval. Aunque los dos movimientos representados son muy diferentes en detalles pero fundamentalmente son iguales en principio y tienen los siguientes elementos en común: 1) 2) 3) 4) Una bobina móvil. Un campo magnético estacionario. Un dispositivo que produce un par recuperador sobre la bobina. Medios para detectar la deflexión angular de la bobina. En ambos casos los movimientos emplean bobinas compactas de muchas vueltas, y es un imán permanente el que proporciona el campo magnético estacionario, con un núcleo dentro de la bobina (pero no unido físicamente a ella); para dar un campo concentrado de características apropiadas. Instrumentos y Mediciones Instymed_t3.doc 1 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi En el caso del galvanómetro de espejo, la bobina móvil puede colgar libremente de una suspensión de hilo, de manera que pueda girar alrededor de su eje, como se muestra en la Fig. 3-1. La suspensión filamentar da también un par recuperador o par de torsión, para contrarrestar la rotación de la bobina producida por el paso de una corriente por ella. La suspensión se emplea también como conductores de la corriente que pasa por la bobina. La posición angular de la bobina puede determinarse por medios ópticos, como se muestra en la Fig. 3-3. Un pequeño espejo, unido rígidamente a la bobina, forma parte del sistema óptico, que comprende también un anteojo y una escala. La escala está iluminada, y los rayos de luz llegan al espejo a través de la escala, y de allí al anteojo, donde el observador ve la imagen de la escala. Figura 3-3 En la versión portátil de este galvanómetro, la bobina móvil pivota sobre dos cojinetes de zafiro de muy pequeña fricción y puede girar libremente. El par recuperador se consigue por medio de muelles en espiral unidos a ambos extremos de la bobina y sujetos por el otro extremo a la armadura del instrumento. La corriente llega a la bobina a través de los muelles recuperadores, y los dos extremos del circuito salen al exterior por un par de terminales. La rotación de la bobina se indica directamente sobre una escala por medio de una aguja indicadora, rígidamente unida a la bobina. Analizaremos con algún detalle los principios en los que se basa la operación del galvanómetro, de modo lograr una mayor comprensión de su forma de operación y limitaciones. 3.1.2 Principios físico s de operación del galvanómetro Existen dos orígenes diferentes de las fuerzas eléctricas que se ejercen sobre una carga eléctrica. Son llamados: “fuerza electrostática” y “fuerza magnética”. Los dos campos vectoriales son: la intensidad de campo eléctrico E [voltio/metro], y la densidad de flujo magnético, B [weber]. La fuerza instantánea sobre una carga puntual de q coulombs, que se mueve con una velocidad de v [m/seg], está relacionada con los dos campos por la ley f = q ( E + v × B) newton Instrumentos y Mediciones Instymed_t3.doc (3.1) 2 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi En el caso particular de que las cargas eléctricas se muevan dentro de un conductor, como en la bobina del galvanómetro, la ley de fuerza puede formularse en función de la corriente de conducción en lugar de la carga. La magnitud de la fuerza total ejercida sobre una bobina de n vueltas es f = inB L (3.2) y su dirección es mutuamente perpendicular a B y al lado de la bobina L. En la versión más popular del instrumento de d'Arsonval se emplea un campo radial uniforme como se muestra en la Fig.3-4, lo que conduce a una escala uniforme. Otra ventaja de esta construcción es que el campo B es menos susceptible a efectos magnéticos erráticos externos que en el caso de que no haya núcleo central. La forma del campo se consigue empleando piezas polares curvadas y un núcleo central proyectado de manera que el campo en el entrehierro sea radial. Un campo radial uniforme es constante en magnitud en todas partes dentro de la región de la bobina, y de dirección variable. Figura 3-4 La revisión del análisis de la fuerza ejercida sobre un lado de la bobina, en el caso de campo uniforme, revela que la magnitud de la fuerza viene dada por la misma expresión en el caso del campo radial uniforme. Sin embargo, en el caso de la Fig. 3-4, la dirección de la fuerza sobre el lado de la bobina depende del ángulo de giro de la bobina. f permanece perpendicular al plano de la bobina para todo θ dentro del campo de trabajo del campo radial. Por tanto, la magnitud del par que actúa sobre la bobina, debido a las fuerzas f en los lados de la bobina, viene dado en este caso simplemente por T = fW. El brazo de palanca es constante para cualquier θ. El hecho esencial conseguido por el campo radial es evitar el brazo de palanca variable, manteniendo la dirección de la fuerza perpendicular al plano de la bobina. La igualdad de los pares que actúan sobre la bobina, empleando un par recuperador Tr = Sθ, donde S es la cte. lineal del resorte, da ahora fW = Sθ. Con fW = nBIA, la ley de deflexión del galvanómetro de campo radial uniforme es I= Sθ = Kθ nBA (3.3) La constante del aparato K viene dada por la misma expresión que en el caso de campo uniforme. Las lecturas de la escala son ahora proporcionales a I. Instrumentos y Mediciones Instymed_t3.doc 3 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Por todo lo planteado anteriormente se construye el galvanómetro d’Arsonval de modo que la bobina se encuentre suspendida en un campo magnético de un imán permanente, con forma de herradura, tal que generará un campo radial. Como se puede observar en la Fig. 3-5. La bobina es suspendida de tal manera que puede girar libremente en el campo magnético. Cuando la corriente fluye por la bobina, se desarrolla un par electromagnético y la bobina gira. Figura 3-5 Escribiendo la ecuación (anterior) en función del par, obtenemos T = n AI B (3.4) La ecuación indica que el par desarrollado es directamente proporcional a la densidad de flujo del campo B en el cual la bobina gira, la corriente I en la bobina y las constantes de la bobina (área A y numero de vueltas n). Dado que la densidad de flujo y el área de la bobina son parámetros fijos para cada instrumento, el par desarrollado es una indicación directa de la corriente en la bobina. El par electromagnético es contrarrestado por el par mecánico de los resortes de control sujetos a la bobina móvil. Cuando los pares se equilibran, la posición angular de la bobina móvil es indicada por una aguja con respecto a una referencia fija, llamada escala. La Ec. (3-4) también muestra que el diseñador puede variar solamente el valor del par de control y el número de vueltas de alambre en la bobina para medir una determinada corriente a plena escala. 3.1.3 Comportamiento dinámico El comportamiento dinámico de un galvanómetro se puede observar mediante interrupciones repentinas de la corriente aplicada, de manera que la bobina regresará de su posición deflectada a su posición cero. Esto se reconoce como resultado de la inercia del sistema móvil, la aguja pasará por la marca cero en dirección opuesta, y después oscilará alrededor de cero. Estas oscilaciones se reducen de manera gradual debido al amortiguamiento del elemento móvil y finalmente la aguja llega a su estado de reposo en cero. Tres cantidades caracterizan el movimiento de la bobina móvil en el campo magnético: Instrumentos y Mediciones Instymed_t3.doc 4 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi • • • El momento de inercia (J) de la bobina móvil sobre el eje de rotación. El par opuesto (S) desarrollado por la suspensión de la bobina. La constante de amortiguamiento (D). La ecuación diferencial que relaciona estos tres factores tiene tres posibles soluciones, y cada una describe el comportamiento dinámico de la bobina en función del ángulo de deflexión θ. Estas respuestas se conocen como (Fig. 3-6): I. Sobreamortiguado, es aquel donde la bobina regresa lentamente a su posición estable sin sobrepaso ni oscilaciones. II. Subamortiguado es aquel donde el movimiento de la bobina está sujeto a las oscilaciones senoidales amortiguadas. La razón con la que desaparecen tales oscilaciones se determina con la constante de amortiguamiento (D), el momento de inercia (J) y el contrapar (S) producido por la suspensión de la bobina. III. Críticamente amortiguado en el cual la aguja regresa con rapidez a su posición estable, sin oscilaciones. Figura 3-6 Idealmente, la respuesta del galvanómetro debería hacer que la aguja llegara a su posición final sin sobretiro; de esta forma el movimiento sería críticamente amortiguado. En la práctica, el galvanómetro es un tanto subamortiguado, lo que causa un sobretiro de la aguja poco después de llegar al reposo. El amortiguamiento del galvanómetro se logra por dos medios: mecánico y electromagnético. El amortiguamiento mecánico es producido principalmente por el movimiento de la bobina a través del aire que la rodea lo que es independiente de la corriente eléctrica que circule por la bobina. La fricción del movimiento en sus cojinetes y la flexión de los resortes de suspensión causada por la bobina giratoria también contribuyen a los efectos de amortiguamiento mecánico. El amortiguamiento electromagnético es causado por los efectos inducidos en la bobina móvil conforme gira en el campo magnético, dado que la bobina forma parte de un circuito eléctrico cerrado. En general el IPBM se construye con el menor amortiguamiento posible, y luego de acuerdo a la necesidad se aumenta el mismo. Esto se logra por ejemplo conectando una resistencia a través de la bobina, en ésta se genera un par opuesto que amortigua el elemento móvil. Instrumentos y Mediciones Instymed_t3.doc 5 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Para cualquier galvanómetro se puede encontrar un valor de este resistor que logre el amortiguamiento crítico (Resistencia externa de amortiguamiento crítico). 3.1.4 Detalle constructivos del movimiento d’Arsonval En la Fig. 3-5 se puede observar que el imán permanente es de forma de herradura, con piezas polares de hierro dulce unidas a él. Entre las piezas polares se encuentra un cilindro de hierro dulce, que sirve para proveer un campo magnético uniforme en el entrehierro, entre las piezas polares y el cilindro. La bobina está devanada en un marco de metal ligero y montada de tal forma que puede girar libremente en el entrehierro. La aguja se encuentra unida a la bobina y se mueve en una escala graduada, que indica la deflexión angular de la bobina y, por lo tanto, la corriente que circula por ésta. Dos resortes conductores de fósforo-bronce proporcionan la fuerza calibrada opuesta al par de la bobina-móvil. Es esencial el comportamiento constante de los resortes para mantener la exactitud del instrumento. La corriente es conducida hacia y desde la bobina por los resortes de control. Figura 3-7 El sistema móvil completo se encuentra en equilibrio estático para todas las posiciones de deflexión por medio de tres contrapesos de balance, como se muestra en la Fig. 3-7. Los resortes, pivotes y aguja están ensamblados en la estructura de la bobina por medio de las bases de los pivotes, y el elemento de la bobina móvil se encuentra sostenido por asientos tipo "joya". Diferentes sistemas de asiento se ilustran en la Fig. 3-8a y 3-8b. El pivote, que se asienta en el hueco de la joya, puede tener un radio en la punta de 0,01 a 0,02 mm, según el peso del mecanismo y la vibración del instrumento. El radio del hueco en la joya es ligeramente mayor que el radio del pivote, por lo que el área de contacto es circular y de unos pocos micrones. El diseño de la joya V de la Fig. 3-8a ofrece una fricción mínima típica de un instrumento de asiento. Las presiones originadas por las aceleraciones relativamente moderadas (como las sacudidas o caídas del instrumento) pueden dañar el pivote. Los instrumentos con protección especial utilizan asientos de joya con resortes traseros (incabloc), cuya construcción se presenta en la Fig. 3-8b. Un resorte lo sostiene en posición normal; pero puede moverse axialmente cuando el golpe llega a ser excesivo. Instrumentos y Mediciones Instymed_t3.doc 6 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Figura 3-8a Figura 3-8b Es importante comentar que las marcas de la escala del instrumento IPBM básico suelen separarse de manera lineal porque el par (y por lo tanto la deflexión de la aguja) es directamente proporcional a la corriente de la bobina. El instrumento IPBM básico es un dispositivo cd de lectura-lineal. La potencia requerida por un IPBM es sorprendentemente pequeña (25-250µW). Suspensión banda-tensada Figura 3-9 El instrumento banda-tensada de la Fig. 3-9 tiene la ventaja de eliminar la fricción de la suspensión joya-pivote. La bobina móvil se suspende por medio de dos cintas de torsión. Estas cintas tienen la suficiente tensión para eliminar cualquier desviación. Esta tensión es suministrada por medio de un resorte tensor; de esta forma, el instrumento puede utilizarse en cualquier posición. Los instrumentos de suspensión banda-tensada se pueden construir con mayor sensibilidad que los que usan pivotes y joyas; los instrumentos bandatensada son un tanto insensibles a golpes y temperatura, y soportan mayores sobrecargas. Compensación de temperatura El movimiento básico del IPBM no es insensible a la temperatura, pero se puede compensar por temperatura con el uso apropiado de resistencias en serie y paralelo de cobre y manganina. Tanto la intensidad del campo magnético como la tensión del resorte decrecen con el incremento de temperatura. La resistencia de la bobina se incrementa con un aumento de la temperatura. Estos cambios tienden a hacer que la lectura de la aguja sea baja para una corriente determinada con respecto a la intensidad del campo magnético y a la resistencia de la bobina. El cambio, la tensión del resorte tiende a originar una lectura más alta con el incremento de temperatura. Los efectos no son idénticos, por lo tanto, un medidor sin Instrumentos y Mediciones Instymed_t3.doc 7 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi compensación tiende a dar lecturas bajas aproximadamente en 0.2 por ciento por cada incremento de °C de temperatura. La compensación se puede realizar con resistores de compensación conectados en serie con la bobina móvil como se muestra en la Fig. 3-10a. La resistencia total de la bobina y el resistor de compensación se incrementa un tanto ligeramente con la temperatura, justo lo necesario para contrarrestar los cambios en el resorte e imán; así, el efecto neto de la temperatura es cero. Figura 3-10a Figura 3-10b Una cancelación más completa de los efectos de temperatura se logra con el arreglo de la Fig. 3-10b. Aquí la resistencia total del circuito se incrementa ligeramente con un aumento de temperatura, por la presencia de bobina de cobre y el resistor de cobre en paralelo. Para un voltaje fijo aplicado, la corriente total disminuye ligeramente con una elevación de la temperatura. La resistencia del resistor en paralelo se incrementa más que la combinación en serie de la bobina y el resistor de manganina; por lo tanto, una fracción más grande de la corriente total circula a través del circuito de la bobina. La proporción correcta de las partes de cobre y manganina en el circuito permite la cancelación total de los efectos de temperatura. Una desventaja del uso del resistor de compensación es la reducción en la sensibilidad a plena escala de la sensibilidad del movimiento, ya que es necesario aplicar un voltaje mayor para mantener la corriente a plena escala. 3.2 Amperímetro de CC 3.2.1 Resistor de derivación El movimiento básico de un amperímetro cc es un galvanómetro IPBM. Puesto que el devanado de la bobina del movimiento básico es pequeño y ligero, sólo puede conducir corrientes muy pequeñas. Cuando se miden corrientes elevadas es necesario desviar la mayor parte de la corriente por una resistencia, llamada de derivación (shunt). La resistencia de derivación se calcula aplicando un análisis convencional de circuitos a la Fig. 3-11, donde: Rm Rs Im Is I = resistencia interna del movimiento (la bobina) = resistencia de derivación o shunt = corriente de deflexión a plena escala del movimiento (Ifsd) = corriente de derivación = corriente a plena escala del amperímetro incluyendo la de derivación. Instrumentos y Mediciones Instymed_t3.doc 8 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Figura 3-11 Ya que la resistencia de derivación está en paralelo con el movimiento del medidor, el voltaje a través de la resistencia y el movimiento deben ser iguales, por lo tanto se puede escribir Vderivación = Vmovimiento o I s Rs = I m Rm Rs = I m Rm Is (3.5) como I s = I − I m , se puede escribir Rs = I m Rm I − Im (3.6) Para cada valor de corriente necesaria a escala completa del medidor, se puede calcular el valor de la resistencia de derivación (shunt) requerida. Ejemplo 3.1. Un galvanómetro de 1mA con una resistencia interna de 100Ω se quiere utilizar como amperímetro de 0-100 mA. Calcular el valor de la resistencia de derivación necesaria. I s = I − I m = 100 − 1 = 99 mA Rs = I m Rm 1mA ×100Ω = = 1.01Ω Is 99mA La Fig. 3-12 ilustra una resistencia en derivación externa. Figura 3-12 Instrumentos y Mediciones Instymed_t3.doc 9 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi 3.2.2 Amperímetro de rango múltiple Figura 3-13 La escala de corriente del amperímetro cd se puede extender mediante varias resistencias de derivaciones, seleccionadas por un interruptor de rango. Tal medidor se llama amperímetro multirrango. La Fig. 3-13 muestra el diagrama esquemático de un amperímetro multirrango. E1 circuito tiene cuatro derivaciones, Ra, Rb, Rc y Rd, que se pueden colocar en paralelo con el movimiento para dar cuatro escalas de corrientes diferentes. El interruptor S es de multiposición, del tipo que hace conexión antes-dedesconectar, de manera que el movimiento no se vea afectado cuando el circuito se queda sin protección, sin derivación, al cambiar de rango. Figura 3-14 Ejemplo 3.2. Diseñe un amperímetro con derivación de Ayrton para escalas de corriente de 1A, 5A y 10A. Se utiliza un galvanómetro d’Arsonval con una resistencia interna de Rm=50Ω, una corriente de deflexión a escala completa de 1mA y se utiliza la configuración de la Fig. 3-14 Para la escala de 1A: Ra+ Rb+ Rc están en paralelo con la bobina móvil de 50Ω. Dado que el movimiento necesita 1mA para la deflexión de escala completa, por lo que se requiere que circule una corriente de derivación igual a I s = I − I m = 1 A − 1 mA = 999 mA I R 1 mA × 50 Ω Rs = Ra + Rb + Rc = m m = = 0,05005 Ω Is 999 mA (I) Para la escala de 5A: Ra+ Rb están en paralelo con Rc+Rm (50Ω). En este caso habrá una corriente de 1mA a través de la bobina móvil y el resistor Rc en serie, así como 4999mA a través de Ra+ Rb I s = I − I m = 5 A − 1 mA = 4999 mA Im× ( Rc + Rm) 1mA × ( Rc + 50Ω) Rs = Ra + Rb = = Is 4999mA Instrumentos y Mediciones Instymed_t3.doc (II) 10 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Para la escala de 10A: Ra sirve como derivación y Rb+Rc están en serie con la bobina móvil. La corriente a través de ella es otra vez 1mA y en la derivación circulan los restantes 9999mA. La ecuación anterior da I s = I − I m = 10 A − 1 mA = 9999 mA I × ( Rb + Rc + Rm ) 1 mA × ( Rb + Rc + 50 Ω) Rs = Ra = m = Is 9999 mA (III) Al resolver las tres ecuaciones simultáneamente (I), (II), (III) se obtiene: 4999 × ( I ) : 4999 Ra + 4999 Rb + 4999 Rc = 250.2 ( II ) : 4999 Ra + 4999 Rb − Rc = 50 Al restar (II) de (I) se obtiene: 5000 Rc = 200.2 Rc = 0.04004Ω Similarmente, 9999 × ( I ) : 9999 Ra + 9999 Rb + 9999 Rc = 500.45 ( III ) : 9999 Ra − Rb − Rc = 50 Al restar (III) de (I) se obtiene: 10000 Rb + 10000 Rc = 450.45 La sustitución del valor calculado de Rc en esta expresión da: 10000 Rb = 450.45 − 400.4 Rb = 0.005005Ω Ra = 0.005005Ω Estos cálculos indican que para corrientes grandes los valores de las resistencias de derivación pueden ser muy pequeños. La derivación universal o de Ayrton de la Fig. 3-14 elimina las posibilidades de tener el medidor sin ninguna derivación en el circuito. Esta ventaja se obtiene a expensas de llegar a tener una resistencia total del medidor ligeramente mayor. 3.2.3 Precauciones para el uso Tómense las siguientes precauciones cuando se use un amperímetro en un trabajo de medición: • No conectar un amperímetro a través de una fuente de fem. Ya que por su baja resistencia circularía una corriente dañina muy alta que puede destruir el delicado Instrumentos y Mediciones Instymed_t3.doc 11 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi movimiento. Siempre se conecta el amperímetro en serie con una carga capaz de limitar la corriente. • Obsérvese la polaridad correcta. La polaridad inversa causa que el medidor deflecte contra el mecanismo de tope y esto podría dañar la aguja. • Cuando se utiliza un medidor multirrango, primero se usa la escala de corriente más alta; luego se disminuye la escala de corriente hasta obtener la deflexión adecuada. Para incrementar la exactitud de la medición, se emplea una escala que dé una lectura tan cercana a la escala completa tanto como sea posible. 3.3 Voltímetro de CC 3.3.1 Resistencia multiplicadora Figura 3-15 La adición de una resistencia en serie o multiplicador convierte al movimiento básico d'Arsonval en un voltímetro de cc, como se muestra en la Fig. 3-15. La resistencia multiplicadora limita la corriente a través del movimiento de forma que no exceda el valor de la corriente de deflexión a plena escala (Ifsd). Un voltímetro de cc mide la diferencia de potencial entre dos puntos en un circuito de cc y por lo tanto se debe conectar a través de una fuente fem o de un componente del circuito. En este tipo de conexión de debe observar la polaridad. El valor de la resistencia multiplicadora necesaria para la escala de voltaje se calcula en base a la Fig. 3-15, donde: Im Rm Rs V = corriente de deflexión a plena escala del movimiento (Ifsd) = resistencia interna del movimiento = resistencia multiplicadora o serie = voltaje a plena escala del instrumento Para el circuito de la Fig. 3-15 V = I m ( Rs + Rm ) Al despejar Rs se tiene Rs = Instrumentos y Mediciones V − I m Rm V = − Rm Im Im Instymed_t3.doc (3.7) 12 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi 3.2.2 Voltímetro de rango múltiple Figura 3-16 La suma de varias resistencias multiplicadoras, junto con un interruptor de rango, provee al instrumento de varias escalas de trabajo. La Fig. 3-16 muestra un voltímetro multirrango con un interruptor de cuatro posiciones y cuatro resistencias multiplicadoras, R1, R2, R3 y R4, para las escalas de voltaje V1, V2, V3, y V4, respectivamente. Los valores de las resistencias multiplicadoras se calculan con el método de sensibilidad. Una variación del circuito de la Fig 3-16 se presenta en la Fig. 3-17, donde las resistencias multiplicadoras están conectadas en serie y el selector de escala conmuta la cantidad apropiada de resistencia en serie con el movimiento. Este sistema presenta la ventaja de que todos los resistores multiplicadores, excepto el primero, tienen resistencias normalizadas y se pueden obtener comercialmente con tolerancia de precisión. Figura 3-17 Ejemplo 3.3. Un movimiento d’Arsonval tiene una resistencia interna, Rm = 100Ω y una corriente escala completa, Ifsd, se va a utilizar un voltímetro de cc multirrango con escalas de voltaje de 0-10 V, 0-50 V, 0-250 V y 0-500 V; se empleara el circuito de la Fig. 3-17. Calcular las resistencias multiplicadoras. Para la escala de 10V (el selector de escala en la posición V4), la resistencia total del circuito es: RT = 10 V = 10 kΩ 1 mA R4 = RT − Rm = 10 kΩ − 100 Ω = 9.900 Ω Para la escala de 50V (selector de escala en posición V3) Instrumentos y Mediciones Instymed_t3.doc 13 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi 50 V = 50 kΩ 1 mA R3 = R T − ( R4 + Rm ) = 50 kΩ − 10 kΩ = 40 kΩ RT = Para la escala de 250V (selector de escala en posición V2) RT = 250 V = 250 kΩ 1 mA R2 = R T −( R3 + R4 + Rm ) = 250 kΩ − 50 kΩ = 200 kΩ Para la escala de 500V (selector de escala en posición V1) 500 V = 500 kΩ 1 mA R1 = R T −( R2 + R3 + R4 + Rm ) = 500 kΩ − 250 kΩ = 250 kΩ RT = Nótese que en el ejemplo antes ilustrado, únicamente la resistencia multiplicadora del rango más bajo R4, tiene un valor no normalizado. 3.3.3 Cifra ohm/volt de un voltímetro La sumatoria de las resistencias respecto a la escala seleccionada en un voltímetro multirango siempre es una constante, ésta a menudo se conoce como sensibilidad S o cifra ohms/volt de un voltímetro. S es esencialmente él recíproco de la corriente de deflexión a plena escala del movimiento básico, esto es: S= 1 Ω I fsd V (3.8) Con el concepto de sensibilidad S de un voltímetro se introduce una ventaja para el cálculo de la resistencia multiplicadora en un voltímetro de cc. Considérese el circuito de la Fig. 3-17, donde: Ω = sensibilidad o cifra ohm/volt del voltímetro V V = escala de voltaje, seleccionado con el interruptor de rango Rm = resistencia interna del movimiento (más la resistencia de rango en serie) Rs = resistencia multiplicadora S Para este circuito RT = S × V (3.9) y Instrumentos y Mediciones Instymed_t3.doc 14 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Rs = ( S × V ) − Rm (3.10) 3.3.4 Efecto de carga La cifra O/V de un voltímetro de cc es un factor importante cuando se selecciona un medidor para determinadas mediciones de voltaje. Un medidor de baja cifra O/V puede dar lecturas correctas cuando se miden voltajes en circuitos de baja resistencia; pero éste produce lecturas erróneas en circuitos de alta resistencia. Cuando se conecta un voltímetro, a través de dos puntos en un circuito altamente resistivo, actúa como un derivador para esa parte del circuito y por lo tanto reduce la resistencia equivalente en esa parte del circuito. El medidor indicará un voltaje menor del que realmente existe antes de conectar el medidor. A este efecto se le llama efecto de carga del instrumento; y lo causan principalmente instrumentos de baja sensibilidad o cifra O/V. El error asociado a este efecto se denomina error de inserción. Figura 3-18 Ejemplo 3.4. Se desea medir el voltaje a través de un resistor de 50 kΩ en el circuito de la Fig. 3-18. Se tienen dos voltímetros para esta medición: el voltímetro 1 con cifra O/V de 1000Ω/V y el voltímetro 2 con una cifra O/V de 20000Ω/V. Ambos se utilizan en la escala de 50V. Calcúlese a) la lectura de cada medidor; b) el error de inserción en cada lectura, expresado como un porcentaje del valor real. Una inspección del circuito indica que el voltaje a través de la resistencia de 50kΩ es V = 50 kΩ × 150V = 50V 150 kΩ Este es el valor verdadero del voltaje a través del resistor de 50kΩ. a) Voltímetro 1 (S = 1000Ω/V) tiene una resistencia de 50V x 1000Ω/V = 50kΩ en su escala de 50V. La conexión del medidor a través del resistor de 50kΩ disminuye la resistencia de las ramas en paralelo del circuito a 25kΩ y la resistencia total del circuito a 125kΩ. La diferencia de potencial a través de la combinación del medidor y el resistor de 50kΩ es V1 = 25kΩ × 150V = 30V 125kΩ Por lo tanto, el dispositivo indica un voltaje de 30V Instrumentos y Mediciones Instymed_t3.doc 15 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi El voltímetro 2 (S = 20kΩ/V) tiene una resistencia de 50V x 20kΩ = 1MΩ, en el rango de 50V, la resistencia del paralelo equivalente es igual a 47.6kΩ. Esta combinación produce un voltaje de V2 = 47.6 kΩ × 150V = 48.36V 147 .6kΩ la cual se indica en el voltímetro. b) El error de la lectura del voltímetro 1 es % de error = valor verdadero − valor aparente × 100 % valor verdadero % de error = 50V − 30V × 100% = 40% 50V El error de la lectura del voltímetro 2 es % de error = 50V − 48.36V × 100 % = 3.28% 50V 3.3.5 Precauciones para el uso Se deben observar las siguientes precauciones generales cuando se utilice un voltímetro: • Obsérvese la polaridad correcta; ya que si es incorrecta origina que el medidor deflecte contra el mecanismo de tope y esto puede dañar la aguja. • Conéctese el voltímetro en paralelo con el circuito o componente cuyo voltaje se va a medir. • Cuando se emplee un voltímetro de escala múltiple, hay que utilizar la escala de mayor voltaje y posteriormente disminuirla hasta tener una lectura lo más cercana a la parte superior de la escala. • Considere el efecto de carga. Este se puede minimizar seleccionando la escala de voltaje más alta (y mayor sensibilidad) como sea posible. Además la exactitud de la medición disminuye si la indicación está en el extremo inferior de la escala. 3.4 Óhmetro 3.4.1 Óhmetro tipo serie Figura 3-19 Instrumentos y Mediciones Instymed_t3.doc 16 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi El óhmetro tipo serie consta de un galvanómetro o movimiento D'Arsonval conectado en serie con una resistencia y una batería, con un par de terminales a los cuales se conecta la resistencia desconocida. La corriente que circula a través del galvanómetro depende de la magnitud de la resistencia desconocida y la indicación del medidor es proporcional a su valor. La Fig. 3-19 muestra los elementos de un óhmetro en tipo serie de una sola escala. R1 R2 E Rm Rx = resistor limitador de corriente = resistor de ajuste a cero = batería interna = resistencia interna del galvanómetro D'Arsonval = resistor desconocido Cuando la resistencia desconocida Rx = 0 (terminales A y B en cortocircuito), circula corriente máxima en el circuito. En estas condiciones, la resistencia de derivación R2 se ajusta hasta que el galvanómetro indique la corriente a escala completa (Ifsd). La posición de la aguja para la corriente de escala completa se marca con “0O”. En forma similar, cuando Rx = ∞ (terminales A y B abiertas) la corriente en el circuito es cero y el galvanómetro indica cero corriente, esta posición se marca con "∞" en la escala. El óhmetro tipo serie tiene ciertas desventajas. La más importante se relaciona con la disminución del voltaje de la batería interna, de forma que la corriente a escala completa disminuye y el medidor no lee "0" cuando A y B están en cortocircuito. La resistencia de derivación R2 en la Fig. 3-19 provee un ajuste para contrarrestar el efecto de la descarga de la batería. Una cantidad conveniente al uso en el diseño de un óhmetro tipo serie es el valor de Rx que origina media deflexión en el medidor. A esta posición, la resistencia a través de los terminales A y B se define como la resistencia de media escala Rh. El circuito es analizable a partir de la corriente a escala completa Ifsd y la resistencia de media escala Rh, se puede calcular los valores de R1 y R2. Al introducir Rh en el circuito se reduce la corriente a ½Ifsd, y la resistencia desconocida debe ser igual a la resistencia interna total del óhmetro. Rh = R1 + R2 Rm R2 + Rm (3.11) La resistencia total que se presenta a la batería es igual a 2Rh, y la corriente necesaria para la deflexión a media escala es Ih = E 2 Rh (3.12) Para producir la deflexión a plena escala, la corriente por la batería se debe duplicar I t = I 2 + I fsd = 2 I h = E Rh (3.13) La corriente de derivación a través de R2 es Instrumentos y Mediciones Instymed_t3.doc 17 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi I 2 = I t − I fsd (3.14) El voltaje en la resistencia de derivación (E2) es igual al voltaje en el galvanómetro E2 = Em I 2 R2 = I fsd Rm o y R2 = I fsd Rm (3.15) I2 Al sustituir la Ec. (3.14) en la Ec. (3.15) y multiplicar por R2 = I fsd Rm I2 = I fsd Rm I t − I fsd = I fsd Rm Rh E − I fsd Rh Rh se obtiene Rh (3.16) Reemplazando la Ec. (3.16) en la Ec. (3.11) (tanto en el numerador como en el denominador) nos queda: R1 = Rh − I fsd Rm Rh R2 Rm = Rh − R2 + Rm E (3.17) 3.4.2 Cálculo del error en un óhmetro serie La corriente Ifsd en un óhmetro serie se da cuando Rx=0 I fsd = E Rh Si Rx?0 la corriente por la resistencia incógnita es Ix = E R h + Rx (3.18) Sacando Rh factor común en el denominador nos queda E Ix = Instrumentos y Mediciones I fsd Rh = R R 1+ x 1+ x Rh Rh Instymed_t3.doc (3.19) 18 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Si reemplazamos Ifsd por L, siendo L la longitud del arco de la escala (desde 8 a 0) y a Ix por l, siendo l la longitud del arco que se forma desde el extremo izquierdo (8) hasta la deflexión de la aguja, la Ec. (3.19) nos queda l= 1+ L Rx (3.20) Rh Si reescribimos la clase de un instrumento analógico en función de loa arcos L y l ésta nos queda C= El ×100 L (3.21) Si derivamos respecto Rx la Ec. (3.20) nos da −L Rh dl = dRx R 2 1 + x Rh Si tomamos ahora incrementos finitos de l y Rx nos queda −L Rh El = 2 ERx Rx 1 + Rh (3.22) Por definición sabemos que el error relativo se calcula dividiendo el error absoluto por el valor medido entonces usando la Ec. (3.22) el error relativo del óhmetro serie nos queda 2 R El 1 + x Rh Rh ER x ex = = Rx Rx (− L ) (3.23) Reemplazando la Ec. (3.21) en la Ec. (3.23) obtenemos 2 C ⋅ R 1 + R x h ER x Rh ex = = ± Rx Rx Instrumentos y Mediciones Instymed_t3.doc (3.24) 19 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Si graficamos ex en función de Rx nos queda una parábola, cuyo mínimo se encuentra en el valor de Rx=Rh y reemplazando este valor en la Ec. (3.24) obtenemos que el valor del error relativo mínimo en un óhmetro serie es e x mín = 4 ⋅ C (3.25) 3.4.2 Óhmetro tipo derivación Este consiste de una batería en serie con una resistencia de ajuste R1, y un galvanómetro D'Arsonval. La resistencia desconocida se conecta a través de las terminales A y B, en paralelo con el medidor. Para este circuito es necesario tener un interruptor que desconecte la batería cuando no se use el instrumento. Cuando la resistencia desconocida Rx = 0Ω (A y B están en cortocircuito), la corriente del medidor es cero. Si la resistencia desconocida Rx = ∞ (A y B están abiertas), la corriente circulará únicamente a través del medidor; y con la apropiada selección del valor de R1, se puede hacer que la aguja marque escala completa. De esta forma, el óhmetro tiene la marca "cero" en el lado izquierdo de la escala (no circula corriente) y la marca "infinito" en el lado derecho de la escala (corriente de deflexión a plena escala). El óhmetro tipo derivación es adecuado para medir valores bajos de resistencia. Figura 3-20 El diagrama del circuito de un óhmetro tipo derivación se muestra en la Fig. 3-20. Donde E = batería interna R1 = resistor limitador de corriente Rm = resistencia interna del galvanómetro D'Arsonval Cuando Rx = ∞, la corriente a escala completa del medidor es I fsd = E R1 + Rm R1 = E (3.26) Al despejar R1 se tiene I fsd − Rm (3.27) Para cualquier valor de Rx conectado a través de los terminales A y B, la corriente por el medidor decrece y está dada por Instrumentos y Mediciones Instymed_t3.doc 20 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Im = Rx E × R R Rm + Rx R1 + m x Rm + R x o Im = ER x R1 Rm + Rx ( R1 + Rm ) (3.28) La corriente del medidor para cualquier valor de Rx, expresada como una fracción de la corriente a escala completa es s= Im Rx ( R1 + Rm ) = I fsd R1 ( Rm + Rx ) + Rm Rx o s= Rx ( R1 + Rm ) Rx ( R1 + Rm ) + Rm R1 (3.29) R1 Rm R1 + Rm (3.30) Definiendo Rp = Sustituyendo la Ec. (3.30) en la Ec. (3.29) se obtiene s= Rx Rx + R p (3.31) Si se utiliza la Ec. (3.31), el medidor se calibra calculando s en términos de Rx y Rp. Para la lectura de media escala del medidor (Im=½ I fsd), la Ec. (3.28) se reduce a 0,5 I fsd = ERh R1 Rm + Rh ( R1 + Rm ) (3.32) Donde Rh = resistencia externa que produce media deflexión. Para determinar los valores sobre la escala para un valor de R1, la lectura de media escala se puede encontrar igualando la Ec. (3.26) y la Ec. (3.32) entonces al despejar Rh obtenemos Rh = Instrumentos y Mediciones R1 Rm R1 + Rm Instymed_t3.doc (3.33) 21 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi El análisis muestra que la resistencia de media escala está determinada por el resistor limitador R1 y la resistencia interna del galvanómetro Rm. La resistencia limitadora, R1, a su vez, está determinada por la resistencia del medidor Rm, y por la corriente de deflexión a plena escala Ifsd. El óhmetro tipo derivación es muy útil para la medición de resistencias de valores muy bajos. 3.5 Multímetro (VOM) El amperímetro, el voltímetro y el óhmetro utilizan el galvanómetro D'Arsonval. La diferencia entre los tres es el circuito utilizado con el movimiento básico. Es por lo tanto lógico que se puede diseñar un instrumento para realizar las tres funciones de medición; este dispositivo, tiene un interruptor de función que selecciona el circuito apropiado al galvanómetro D'Arsonval y es llamado comúnmente multímetro o medidor-volt-ohmmiliampere (VOM). La Fig. 3-21, muestra un multímetro comercial. Figura 3-21 3.6 Instrumentos indicadores de corriente alterna En una gran cantidad de procesos, es necesario realizar medidas eléctricas de formas de onda no sinusoidales. Las propiedades de estas señales son importantes para el diseño y análisis de instrumentos y sistemas de medidas. Un error común al realizar una medida es despreciar la influencia de la forma de onda de la señal en las lecturas del instrumento. Para poder realizar un análisis correcto de las mediciones realizadas sobre señales no sinusoidales es necesario definir algunos conceptos básicos. 3.6.1 Definiciones Valor medio de una onda periódica. El valor medio de una función periódica en el tiempo, f (t ) = f (t + T ) , sobre un intervalo igual al periodo T , es: Fav = Instrumentos y Mediciones 1 T ∫ T 0 f (t ) dt Instymed_t3.doc (3.34) 22 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi La ecuación anterior nos dice que si la función es simétrica el valor de Fav o función promedio (average=promedio) es cero, por ejemplo si tomamos una onda sinusoidal. Para resolver este problema se divide el intervalo T, en dos o más intervalos más pequeños, entonces, el valor medio es la suma algebraica de las integrales de cada una de las divisiones. En particular si es una onda simétrica nos queda: Fav = 1 T2 f (t )dt T 2 ∫0 (3.35) Valor eficaz de ondas periódicas. El valor eficaz de una función periódica en el tiempo f (t ) = f (t + T ) en un intervalo igual al periodo es: Frms = 1 T ∫ [ f (t )] dt T 2 0 (3.36) El subíndice rms viene de ‘root mean square’ o raíz media cuadrática. Tomemos un ejemplo, sea el voltaje sinusoidal v(t)=Vpsen? t, donde Vp es el valor pico de v(t). El valor eficaz es: 2 Vrms = 2V p2 1 T2 2 2 V sen ω tdt = p T 2 ∫0 T ∫ T 2 0 2V p2 t T 2 V p2 1 1 − cos 2 ω t dt = + 0 = T 2 0 2 2 2 Por tanto Vrms = V p 2 (3.37) Del ejemplo se desprende que el valor eficaz depende de la función. El valor eficaz de una señal alterna es aquel equivalente de continua que produce igual disipación de calor, en una resistencia dada, que la señal de alterna. Factor de forma. El factor de forma de una función periódica del tiempo se define como el cociente entre el valor eficaz y el valor medio. Factor de forma = Frms Fav (3.38) Cuando se trata de una señal constante (CC) el factor de forma es la unidad, ya que el valor eficaz y el valor medio son iguales al valor continuo. El factor de forma de una onda sinusoidal es infinito. Sin embargo, el factor de forma de la onda sinusoidal rectificada de la Fig. 3-22 es finito. Instrumentos y Mediciones Instymed_t3.doc 23 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Figura 3-22 Por ejemplo, para la señal de la Fig. 3-22, calcularemos su factor de forma. El valor eficaz de la onda es igual al de la onda sinusoidal, dado a que la inversión de los ciclos negativos no afecta al cálculo del mismo (la función está elevada al cuadrado). Entonces: Frms = Fp (3.39) 2 El valor medio se calcula Fav = 1 T2 Fp senωtdt T 2 ∫0 Cambiando la variable t por x = 0 y x = ω T 2 = π . La integral queda: Fp ω π ∫ 0 sen xdx = Fp ω [− cos x]π0 = Fp ω [− (− 1) + 1] = 2 Fp ω El valor medio es: Fav = 2 2Fp T ω 2Fp = π (3.40) Y el factor de forma queda: Factor de forma = Fp 2 2Fp π = π 2 2 = 1,11 (3.41) El factor de forma se utiliza para obtener el valor real de la escala rms para las diferentes formas de onda medidas con instrumentos calibrados para señales sinusoidales. Instrumentos y Mediciones Instymed_t3.doc 24 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi 3.6.2 Tipos de instrumentos de CA El instrumento de D'Arsonval responde al valor promedio o de CC de la corriente que circula por la bobina móvil. Si el galvanómetro conduce una corriente alterna con medios ciclos positivos y negativos, el par producido será en una dirección para el ciclo positivo y en la otra para el negativo, dándonos una deflexión media de cero con lo cual el indicador de D’Arsonval o vibra en torno a cero o indica cero permanentemente. Figura 3-23 Como el instrumento de D’Arsonval es demasiado valioso para desecharlo en aplicaciones de CA, se han desarrollado algunos medios para obtener un par unidireccional que no se invierte cada medio ciclo produciendo una indicación estable, legible, de una señal de CA aplicada. El esquema general es modificar la forma de onda que hay que medir, de modo que se obtenga una onda con valor medio distinto de cero, como indica el diagrama de bloques de la Fig. 3-23. Un método es el de rectificación de la CA, de tal forma que la corriente rectificada deflecte la aguja. Otros métodos que utilizan el instrumento de D’Arsonval consisten en medir el efecto de calentamiento de la corriente alterna para producir una indicación de su magnitud (termoinstrumentos). El otro tipo de instrumento es el que sigue una ley cuadrática, es decir, que su deflexión media es proporcional al cuadrado del valor eficaz de la tensión o corriente aplicada. Estos instrumentos son especialmente valiosos, pues se encuentran relativamente libres de errores debidos a la forma de onda, son llamados instrumentos de trms (valor eficaz verdadero). En este grupo se encuentran los electrodinamómetros y los instrumentos de hierro móvil. 3.6.3 Electrodinamómetro Figura 3-24 Instrumentos y Mediciones Instymed_t3.doc 25 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi El electrodinamómetro se utiliza en voltímetros y amperímetros de CA muy exactos, no solamente para la medición de señales de alta frecuencia de la línea de energía sino también para señales que se encuentren en rangos bajos de audiofrecuencia. El par producido en este instrumento procede de las fuerzas magnéticas entre bobinas que conducen corrientes, una de las cuales es giratoria. Puede pensarse, cualitativamente, que es un galvanómetro de D’Arsonval cuyo imán permanente ha sido reemplazado por un electro imán. Una bobina fija, dividida en dos porciones, produce el campo en el volumen que ocupa la bobina móvil. La Fig. 3-24 muestra las partes de este movimiento. El montaje completo está rodeado por un blindaje laminado para proteger el instrumento de los campos magnéticos exteriores que puedan afectar su operación. El amortiguamiento se logra mediante aletas de aluminio que se mueven en cámaras de aire. Una vista de un corte de un electrodinamómetro se muestra en la Fig. 3-25. Figura 3-25 Para entender la operación del instrumento conviene recordar las expresiones del par desarrollado por una bobina suspendida en un campo magnético. T = B × A× I × N (3.42) Esta ecuación indica que el par que deflecta la bobina móvil es directamente proporcional a las constantes de la bobina (A y N), la densidad de flujo magnético en el cual la bobina se mueve (B), y a la corriente que circula por la bobina. En el electrodinamómetro la densidad de flujo (B) depende de la corriente que circula a través de la bobina fija y por lo tanto es directamente proporcional a la corriente de deflexión (I). Puesto que las dimensiones de la bobina y su número de vueltas son cantidades fijas para un medidor dado, el par desarrollado es una función de la corriente al cuadrado (I2). Si el electrodinamómetro se diseña exclusivamente para utilizarlo en cd, la escala cuadrática se observa fácilmente mediante las marcas de la escala agrupadas en valores muy bajos de corriente, y aumentando el espaciamiento progresivamente hacia los valores más altos de corriente. Para utilizarlo en ca, el par desarrollado en cualquier instante es proporcional a la corriente instantánea al cuadrado (i2). El valor instantáneo de i2 siempre es positivo y, por consiguiente, se producirá un par pulsante. El movimiento del electrodinamómetro no puede seguir las rápidas variaciones del par y toma una posición en la cual el par promedio se equilibra con el par de control de los resortes. La deflexión del medidor es función de la media del cuadrado de la corriente. La escala del electrodinamómetro se calibra en términos de la raíz cuadrada de la corriente promedio al cuadrado; de esta forma, el medidor indica valores eficaces o rms de la CA. Instrumentos y Mediciones Instymed_t3.doc 26 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Las propiedades de transferencia del electrodinamómetro son claras cuando se compara el valor eficaz de una corriente alterna con el de la corriente directa en términos de sus efectos caloríficos o transferencia de potencia. Una corriente alterna que produce calor en una resistencia dada a la misma razón promedio que una corriente directa (I) tiene, por definición una corriente de I amperes. La razón promedio de generación de calor por una CD de I amperes en una resistencia R es RI2 watts. La razón promedio de generación de calor por una CA de i amperes durante un ciclo en la misma resistencia R es 1 T ∫ T 0 i 2 Rdt (3.43) Por definición, I 2R = 1 T T ∫ 0 i 2 Rdt (3.44) promedio i 2 (3.45) y I= 1 T ∫ T 0 i 2 dt = Esta corriente I se llama raíz cuadrática media (rms) o valor eficaz de la corriente alterna, suele denominársele valor de cd equivalente. Si el electrodinamómetro se calibra con una corriente directa de 1 A y se marca la escala para indicar este valor de 1 A cd la corriente alterna que produce una deflexión de la aguja a esa misma marca en la escala corresponderá a un valor rms de 1 A. De esta forma, se puede "transferir" una lectura realizada con cd a su valor en ca y así se establece una correspondencia directa entre ca y cd. El electrodinamómetro presenta ciertas desventajas. Una de ellas es su alto consumo de energía, como consecuencia directa de su construcción. La corriente medida, además de circular por la bobina móvil debe proporcionar el flujo de campo. Para obtener suficiente campo magnético fuerte, se requiere una alta fmm (fuerza magnetomotriz) y la fuente debe suministrar corriente y potencia altas. La densidad de flujo baja de un electrodinamómetro afecta de inmediato el par producido y, por lo tanto, la sensibilidad del instrumento es generalmente muy baja. La adición de una resistencia en serie convierte al electrodinamómetro en un voltímetro, el cual otra vez puede usarse para medir voltajes de cd y ca. La sensibilidad de un voltímetro electrodinamómetro es baja, del orden de 10 a 30 Ω/V (comparada con 20 Ω/V de un medidor D'Arsonval). La reactancia y la resistencia de la bobina también se incrementan cuando aumenta la frecuencia, limitando la aplicación del voltímetro electrodinamómetro a rangos de frecuencias bajas. Es muy exacto para la medición de señales a la frecuencia de la línea de energía y por lo general se utiliza como un patrón secundario. No es un instrumento económico. El movimiento electrodinámico (incluso sin derivación) se puede utilizar como un amperímetro, sin embargo es difícil diseñar una bobina móvil que pueda conducir más de aproximadamente 100 mA. Para salvar esta limitación se puede emplear una derivación esto permite construir amperímetros para corrientes de hasta 20 A. Instrumentos y Mediciones Instymed_t3.doc 27 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi 3.6.4 Instrumentos d e hierro móvil El par que se produce en un instrumento de hierro móvil procede de las fuerzas magnéticas que ejerce el campo producido por una bobina fija sobre un hierro móvil. Cuando pasa corriente por la bobina se produce una fuerza sobre el elemento móvil de hierro. La autoinducción de la bobina y, por lo tanto, su energía almacenada cambia a causa de un movimiento del elemento. Figura 3-26 La Fig. 3-26 muestra un simple instrumento de hierro móvil, tipo émbolo. El émbolo de hierro puede girar alrededor de un eje, contenido por un muelle espiral. La corriente alterna i en la bobina fija produce una fuerza sobre el hierro, que tiende a introducirlo en la bobina, cualquiera que sea el sentido de i. Un indicador unido al émbolo indica su situación angular directamente en una escala, cuando se consigue el equilibro entre el par medio aplicado y el par recuperador que produce el muelle. Si se desprecia la capacidad parásita, lo cual no está justificado a altas frecuencias, se desprecia la energía almacenada en el campo eléctrico. La energía instantánea almacenada en el campo magnético es: W = 1 Li 2 2 (3.46) donde L es la autoinducción de la bobina en la cual se mueve el émbolo. El par instantáneo se obtiene fácilmente a partir de esta expresión de la energía, manteniendo i constante y permitiendo al émbolo realizar un pequeño desplazamiento angular d? ∂W Tθ = + ∂θ ∂ 1 2 1 2 ∂L = Li = i ∂θ 2 2 ∂θ (3.47) El par instantáneo es función del cuadrado de la corriente instantánea y tendrá, por tanto, un valor medio distinto de cero. El par medio es: Tav = Instrumentos y Mediciones 1 T ∫ T 0 Tθ dt = 1 ∂L 1 2 ∂θ T ∫ T 0 i 2 dt = Instymed_t3.doc 1 ∂L 2 I rms 2 ∂θ (3.48) 28 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi La integración indicada representa, por definición, el cuadrado del valor eficaz de la corriente de la bobina. Por tanto, dentro de los errores de despreciar la dependencia de L con la corriente, el par medio depende del valor eficaz de la corriente en la bobina para cualquier forma de onda de la corriente. Sin embargo, en este instrumento hay error de forma de onda, debido a la no linealidad. Los instrumentos de hierro móvil son económicos, sólidos y capaces de una precisión mejor del 1% en el rango de frecuencias de alimentación. Aunque están sujetos a pequeños errores de forma de onda y susceptibles a campos magnéticos parásitos externos, se usan mucho en aplicaciones de alimentación en CA. 3.6.5 Instrumentos tipo rectificador La medición de ca mediante el uso de un rectificador que convierte la ca en cd unidireccional es muy eficaz, ya que un movimiento de cd por lo general tiene mayor sensibilidad que un instrumento electrodinamómetro o medidor de hierro móvil. En términos generales los instrumentos tipo rectificador usan un galvanómetro IPBM en combinación con algún arreglo rectificador. El elemento rectificador consiste por lo común en un diodo de germanio o silicio. Los diodos de germanio tienen un voltaje pico inverso (PIV) de 300 V y un régimen de corriente de alrededor de 100 mA. Los diodos rectificadores de silicio son de baja corriente tienen un PIV superior a 1000 V y un régimen de corriente del orden de 500 mA. Figura 3-27 Según su construcción podemos encontrar tres grandes tipos de instrumentos rectificadores, simples, dobles y de puente. Un sencillo voltímetro rectificador simple se puede construir conectando un rectificador en serie con un instrumento de D’Arsonval y una resistencia externa R1, como indica la Fig. 3-27. Supongamos que se aplica un voltaje sinusoidal, e(t)=Ep sen wt, a los terminales de este instrumento. Cuando e(t) es una caída de tensión en la dirección de la flecha de la Fig. 3-27, el rectificador sufre una tensión directa y su resistencia es baja. Esto permite pasar una corriente sustancial a través del instrumento durante el semiciclo positivo de e(t). En un rectificador ideal la resistencia directa es cero e i(t) es proporcional a la tensión aplicada a los terminales del instrumento en el intervalo 0 < t < T/2. Sin embargo, la resistencia directa de un rectificador real es función de la corriente, generalmente decreciente al aumentar i(t). Por lo tanto, la corriente en el instrumento no es necesariamente un tramo sinusoidal, entonces i(t) viene dada aproximadamente por Instrumentos y Mediciones Instymed_t3.doc 29 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi i (t ) = Ep R sen wt 0<t < T 2 (3.49) donde R = R1 + Rm Cuando e(t) se encuentra en el semiciclo negativo, en el intervalo T/2 < t < T, el rectificador soporta un voltaje inverso y presenta alta resistencia. Es obvio que el valor medio, o valor de CC del trozo de sinusoide, es la mitad del valor medio de la onda sinusoidal rectificada de la Fig. 3-22, para la cual se halló por integración que Fav=2Fp/p. La deflexión ? del instrumento depende únicamente de la componente continua de los trozos sinusoidales. Por tanto, la deflexión viene dada por θ= Ip πK = Ep πKR R grande (3.50) y es proporcional al valor de pico del voltaje aplicado. La dificultad principal de este voltímetro surge en los semiciclos negativos de e(t). El voltaje inverso que soporta el rectificador aproximadamente es igual a e(t), pues la corriente es esencialmente cero. Algunos rectificadores no toleran un voltaje inverso apreciable. De modo que el rectificador de la Fig. 3-27 puede quedar destruido por los ciclos negativos de e(t). La capacidad C, inherente al rectificador, constituye otra dificultad. Al aumentar la frecuencia de e(t), la reactancia de C se hace pequeña en relación con la resistencia inversa del rectificador. Esto permite el paso de la corriente en los semiciclos negativos de e(t), en los que se desea corriente cero. Por tanto, la presencia de C tiende a anular la acción rectificadora a altas frecuencias. El peligroso voltaje inverso aplicado al rectificador se puede eliminar virtualmente añadiendo un segundo rectificador en paralelo con el instrumento y su rectificador en serie, como aparece en la Fig. 3-28. Con la polaridad que indica la flecha, se observa que el rectificador en paralelo no afecta apreciablemente al circuito en los semiciclos positivos de e(t), pues experimenta un voltaje inverso y presenta alta resistencia. En los semiciclos negativos de e(t) el rectificador en paralelo experimenta un voltaje directo que produce baja resistencia. La baja resistencia desacopla al instrumento y prácticamente conduce toda la corriente durante los semiciclos negativos. Esto es una acción positiva que asegura una corriente pequeña en el instrumento. Resulta que los rectificadores se protegen mutuamente de un voltaje inverso excesivo y al propio tiempo producen una corriente semidireccional en el instrumento. Esta modificación al instrumento rectificador simple es la que se conoce como instrumento rectificador doble. Figura 3-28 Instrumentos y Mediciones Instymed_t3.doc 30 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Los semiciclos negativos del voltaje aplicado no contribuyen a la deflexión de los instrumentos rectificadores de las Figs. 3-27 o 3-28. Se puede doblar la sensibilidad del instrumento si se convierten los semiciclos negativos en salida útil. Disponiendo cuatro rectificadores en puente, como muestra la Fig. 3-29, se consigue rectificación de onda completa. Es el circuito usual en los instrumentos comerciales. Esta disposición en puente no se usa para conseguir un cero, sino para que los trozos de sinusoide anteriormente eliminados produzcan corrientes en el instrumento. Figura 3-29 Si R1 es mucho mayor que la suma de las resistencias directas de los dos rectificadores en serie, la resistencia total del instrumento será constante y prácticamente igual a R=R1+Rm. Si además R es grande comparada con la impedancia interna de e(t) a todas las frecuencias de la i(t) no sinusoidal, la corriente en el instrumento es aproximadamente igual a i (t ) = Ep R (3.51) sen wt donde las dos barras indican valor absoluto. La frecuencia angular fundamental de la sinusoide rectificada es 2w. De aquí que la deflexión del instrumento dependerá solamente de la componente continua de i(t). El valor medio de una sinusoide rectificada cuyo valor de pico fuera Ep se halló ser igual a Fav=2Fp/p. Por tanto, la deflexión del instrumento con puente rectificador es θ= 2I p πK = 2E p πKR R grande (3.52) que es el doble de la deflexión con media onda, Ec. (3.50), para igual voltaje aplicado. Cuando se utiliza como rectificador una disposición tipo puente nos encontramos con un instrumento rectificador en puente. Usualmente las escalas de los instrumentos rectificadores indican directamente valores eficaces basados en la suposición de que la onda de corriente en el instrumento es una sinusoide rectificada. En otras palabras, se incorpora a las divisiones de la escala el factor de forma de una onda sinusoidal, que vimos era 1,11. Esto representa un fallo en el uso de tales instrumentos, pues el indicador del instrumento de D’Arsonval responde al Instrumentos y Mediciones Instymed_t3.doc 31 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi valor medio de la corriente. En consecuencia, las lecturas no representarán usualmente el valor eficaz de corrientes o voltajes. Por ejemplo, en el caso de un voltímetro de rectificador en puente con una gran resistencia en serie R, la lectura del voltímetro viene dada por V = 1,11KRθ (3.53) El factor por el que se multiplica ? es el llamado “factor de escala” e incluye al factor de forma 1,11. El factor de escala es constante si R es grande. Si el voltaje aplicado e(t) es una sinusoide de valor de pico Ep, la deflexión angular viene dada por la Ec. (3.52). La lectura V1 será, según la Ec. (3.53), V = 1,11KR 2E p πKR = 0,707 E p (3.54) En este caso la lectura es igual al valor eficaz de e(t), lo cual no debe sorprender, pues se diseño deliberadamente con esa intención. Si e(t) no es un voltaje sinusoidal, la lectura puede ser o más alta o más baja que el valor eficaz de e(t), dependiendo de la forma de onda. Para corregir este error es necesario aplicar la siguiente ecuación Vseñ = Donde Vseñ FFO señ Vmed FFOinstr es la verdadera tensión de la señal medida FFOinstr es el factor de forma de onda de la señal medida es el factor de forma de onda del instrumento (generalmente 1,11) Vmed es el valor de tensión que obtuvimos con el instrumento. FFO señ (3.55) La resistencia del elemento rectificador cambia con las variaciones de temperatura; ésta es una de las mayores desventajas de los instrumentos de ca tipo rectificador. La exactitud del medidor suele ser satisfactoria en condiciones normales de operación a temperatura ambiente y es generalmente del orden de ±5% de la lectura a plena escala con una onda senoidal. La frecuencia también afecta la operación de los elementos rectificadores. El rectificador presenta propiedades capacitivas y tiende a filtrar frecuencias altas. Las lecturas del medidor pueden ser erróneas hasta un 0.5% menos por cada aumento de 1 -kHz en la frecuencia. A pesar de estas dificultades la combinación de alta sensibilidad y bajo costo hacen de este tipo de instrumentos uno de los más usados en el rango de frecuencias audibles. Instrumentos y Mediciones Instymed_t3.doc 32 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi 3.7 Simbología de instrumentos de medición La Fig. 3-30 muestra los símbolos más comunes que aparecen en los instrumentos de medición analógicos y su significado. Figura 3-30 3.7 Temas a desarollar: • ¿Se puede lograr un galvanómetro que deflecte proporcional a ?/cos?? ¿Cómo sería? • ¿Cuáles son los valores típicos de fabricación de un instrumento analógico de panel con IPBM? • Encontrar una expresión genérica que relacione la disminución del potencial de una pila con la resistencia de ajuste de cero en un óhmetro serie. • Graficar el error relativo en un óhmetro serie en función de la resistencia medida y deducir cuando éste es mínimo. 3.8 Bibliografía 1) “Instrumentación Electrónica Moderna y Técnicas de Medición” de W. Cooper. Editorial Prentice Hall 1982. 2) “Análisis de medidas eléctricas” de E. Frank, Editorial Mc Graw Hill 1969 3) “Curso Práctico de Electrónica Industrial y Automatización” Capitulo 5 “Prueba y mediciones eléctricas básicas” de CEKIT Instrumentos y Mediciones Instymed_t3.doc 33