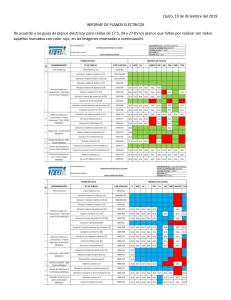
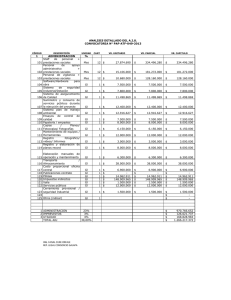
Aplicando las tolerancias de balanceo en rotores de diversas máquinas Por Gene Vogel Especialista de Bombas & Vibraciones de EASA Nota del Editor: Un PDF de este artículo en inglés y en español se encuentra disponible en www.easa.com en la “Biblioteca de Recursos” l l l l l La especificación ISO para balancear rotores rígidos (ISO 1940-1) fue innovadora cuando fue introducida hace varias décadas. Esta norma estableció los Grados de Calidad de Balanceo basada en la velocidad teórica que el centro de masa de un rotor se encontraría en espacio libre, girando a la velocidad de funcionamiento normal del rotor. Esta es terminología técnica difícil de expresar, pero un entendimiento práctico de la naturaleza de las fuerzas de desbalanceo es importante para aplicar las tolerancias de balanceo en rotores de diversas máquinas. Esto también ayuda a entender el impacto de los cambios fundamentales en la reciente norma de reemplazo: 21940-11: 2016. Primero, vamos a clarificar la diferencia entre desbalanceo y vibración. Si una máquina tenía cierta cantidad de desbalanceo y fue asentada sin restricciones sobre un acolchado suave (una almohadilla de caucho), existirá cierta cantidad de vibración a 1x rpm. Atornille esa misma máquina a una fundación maciza y la vibración a 1x rpm será mucho menor. Así que no hay conversión directa de desbalanceo a vibración y viceversa. Por consiguiente, para maquinaria en funcionamiento, las unidades de amplitud de vibración comunes de desplazamiento y velocidad no son medidas directas del desbalanceo, La cantidad de desbalanceo del rotor se puede describir como una cantidad de masa (peso) en un radio determinado. Unidades de desbalanceo Las unidades típicas son onzas-pulgada, gramos-mm u ocasionalmente la mezcla de unidades gramos-pulgada. Estas unidades de desbalanceo no se pueden convertir directamente a unidades de vibración, incluso si la Desbalanceo en c/g <–> eje de rotación “ Primero, vamos a clarificar la diferencia entre desbalanceo y vibración. Si una máquina tenía cierta cantidad de desbalanceo y fue asentada sin restricciones sobre un acolchado suave (una almohadilla de caucho), existirá cierta cantidad de vibración a 1x rpm. Atornille esa misma máquina a una fundación maciza y la vibración a 1x rpm será mucho menor. Así que no hay conversión directa de desbalanceo a vibración y viceversa ” velocidad de rotación de la máquina y el montaje son conocidos. Pero la experiencia práctica permite establecer límites de desbalanceo razonables que darán como resultado niveles de vibración aceptables en máquinas de aplicaciones industriales normales. Estos límites razonables de desbalanceo están formulados en los Grados de Calidad de Balanceo presentes en la Continúa en la Página 2 Desbalanceo en c/g <–> eje de rotación 0.125” 100 lb x 0.125” = Desbalanceo de 200 oz-pul Rotor de100 lb. (1600 oz.) 10 oz. x 20” = Desbalanceo de 200 oz-pul 10 oz CG Centro de Gravedad 20” © 2017. EASA, Inc., St. Louis, MO. All rights reserved Eje de Rotación (Centro del muñón del eje) EASA Balancing Tolerances Webinar Figura 1. El debalanceo mueve el CG lejos del Eje rotacional. Electrical Apparatus Service Association, Inc. • Copyright © 2017 • CG Centro de Gravedad © 2017. EASA, Inc., St. Louis, MO. All rights reserved Eje de Rotación (Centro del muñón del eje) EASA Balancing Tolerances Webinar Figura 2. Girando en espacio libre, el Eje Rotacional prescribe un círculo. www.easa.com • Agosto de 2017 1 Aplicando las tolerancias de balanceo en rotores de diversas máquinas Continuación de la Página 1 norma ISO 21940-11. El cambio fundamental en la norma nueva es donde se deben evaluar las tolerancias del rotor. Es necesario un repaso sobre los fundamentos de balanceo. Considere una situación de desbalanceo en un solo plano de un rotor que no es muy ancho. El rotor tiene 40 pulgadas de diámetro, pesa 100 libras (1600 oz) y está perfectamente balanceado. Si se añade un peso de 10 oz en el diámetro exterior del rotor, la cantidad de desbalanceo es de 200 oz-pul (10 oz a un radio de 20”). Ese peso de desbalanceo desplazará el centro de masa del rotor o el centro de gravedad (CG) en 1/8 de pulgada: Un ejemplo métrico similar sería un rotor con forma de disco de 50 Kg y un 1 metro de diámetro, con un peso de desbalanceo de 10 g en el diámetro exterior. Esto daría como resultado un desbalanceo de 5000 g-mm y un desplazamiento equivalente del CG de 1 mm desde la línea central del eje. Si el rotor estaba girando en espacio libre, el rotor debería rotar alrededor de su CG. Con lo cual la línea central prescribirá un círculo con un radio de 1/8 pulgada. (1 mm para el ejemplo métrico). La velocidad de giro determinaría que tan rápido se estaba moviendo la línea central del eje alrededor del círculo prescrito (la velocidad). Ya que el soporte del rodamiento es aplicado a la línea central del eje, la fuerza ejercida en los rodamientos aumenta con relación a esa velocidad. La discusión anterior presenta la teoría básica del desbalanceo en la ISO 21940-11: Como se explica en 4.4 y 8.1, se recomienda que los planos de tolerancia (a menudo idénticos a los planos de los rodamientos) y no los planos de corrección, sean utilizados para establecer las tolerancias de desblanceo. que se basan los Grados de Calidad de Balanceo. Cualquiera de los rotores balanceados con el mismo Grado de Calidad, ejercerá fuerzas similares sobre los rodamientos sin importar el peso o la velocidad de funcionamiento del rotor. De esta forma se puede aplicar un grado de calidad G2.5 en los rotores de los motores en general, aunque el peso y la velocidad de operación del rotor varíen ampliamente. Esta teoría básica no ha cambiado entre la ISO 1940-1 y la ISO 21940-11. Dos enfoques posibles El cambio principal que fue implementado con la 21940-11 es donde van a ser evaluadas las tolerancias para un balanceo en dos planos. En la norma original ISO 1940-1, las tolerancias eran aplicadas en los planos de corrección. Así los pesos de ensayo denominados algunas veces pesos de calibración, localizados en el plano de corrección, proporcionaban una medida directa con respecto a las tolerancias. En la 21940-11 las tolerancias se deben evaluar en los planos de los rodamientos y no en los planos de corrección. Existen dos enfoques posibles para utilizar los planos de los rodamientos para evaluar las tolerancias. El primero es evaluar simplemente el desbalanceo residual en el plano de corrección, basados en hacer girar el rotor después de instalar pesos de prueba y trasladar geométricamente estos resultados a los planos de los rodamientos. Si el desbalanceo residual fuera solamente estático, esto será sencillo. Pero un desbalanceo en cupla requiere que los vectores de desbalanceo residual sean proporcionales al cambio de la distancia del CG. En la mayoría de los rotores de motores eléctricos, los planos de los rodamientos son externos a los planos de corrección, por lo que los planos de los rodamientos están más alejados del CG que los planos de corrección. Así, el desbalanceo residual en cupla será menor en los planos de los rodamientos que en los planos de corrección. El desbalanceo residual estático Electrical Apparatus Service Association, Inc. • Copyright © 2017 • “ Las normas ISO especifican procedimientos especiales para asignar Uper a los planos de corrección en rotores asimétricos y en configuraciones de rotor especiales. Los centros de servicio deben contar con una copia de la norma aplicable y familiarizarse por si mismos con esos procedimientos ” no cambia cuando es trasladado desde los planos de corrección a los planos de los rodamientos. Así, un método para calcular el traslado consiste en separar los componentes estáticos y en cupla del desbalanceo residual y trasladarlos desde los planos de corrección hasta los planos de los rodamientos. A un técnico de balanceo se le puede hacer difícil realizar estos cálculos de forma manual. Un segundo enfoque es darse cuenta que la medida del desbalanceo en una balanceadora ocurre en los planos de los rodamientos y que se puede aplicar directamente a las tolerancias sin tener en cuenta cualquiera de los pesos de calibración ubicados en los planos de corrección. Pero las medidas son diferentes en las balanceadoras con soportes suaves y con soportes rígidos. Las balanceadoras con soportes rígidos miden la fuerza y la fórmula de la fuerza sería utilizada para convertir los valores medidos en desbalanceo residual. La mayoría de los instrumentos de las balanceadoras con soportes rígidos harían estos cálculos y proporcionan automáticamente la evaluación necesaria en los planos de los rodamientos. Desplazamiento del CG Las balanceadoras con soportes suaves miden el desplazamiento en los planos de los rodamientos. En la discusión anterior sobre los fundamentos www.easa.com • Agosto de 2017 Continúa en la Página 3 2 Aplicando las tolerancias de balanceo en rotores de diversas máquinas Continuación de la Página 2 de balanceo se demostró que las tolerancias de balanceo son realmente el desplazamiento del CG desde la línea central. Con lo cual, el desplazamiento medido por una balanceadora con soportes suaves se puede relacionar directamente con las tolerancias en los planos de los rodamientos. Tanto la ISO 1940-1 como la ISO 21940-11 utilizan el término “eper” para describir la excentricidad del CG desde la línea central. En realidad, los valores ‘G’ definidos en las Normas son exactamente los valores eper multiplicados por la velocidad angular (velocidad de rotación operacional) en mm/s. Recuerde de la discusión anterior sobre fundamentos de balanceo, que el CG prescribe un círculo con un radio igual al desplazamiento del CG desde la línea central. Este es el valor del desplazamiento medido por los instrumentos de una balanceadora con soportes suaves, en unidades pico-pico. Así, el valor de desplazamiento medido, es simplemente eper x 2 (pico vs picopico o radio vs diámetro). Lo que esto significa es que el valor de desplazamiento medido por una balanceadora con soportes suaves es simplemente el eper en unidades pico-pico y una indicación directa del desbalanceo residual en los planos de los rodamientos. Esto se puede comparar directamente con las tolerancias de la Norma ISO convirtiendo simplemente las mil pico-pico en micras pico (una micra = mm/1000) y multiplicándolas por la velocidad angular. Saltándonos todas las conversiones aritméticas y utilizando velocidades de máquinas comunes, el resultado es que si un rotor que funciona a una velocidad de 1800 rpm es balanceado a 1 mil pico-pico (25 micras) o menos en cada posición de soporte, este cumple con el Grado de Calidad de Balanceo ISO G2.5. Para un rotor de 3600 rpm, balancearlo a ½ mil pico-pico (12 micras) cumple con el Grado de Calidad de Balanceo ISO G2.5 y proporcionalmente para cualquier velocidad de rotor. El peso del rotor no se tiene en cuenta en la conversión y no se considera como un problema. La cuestión es que el balanceo de la mayoría de rotores por debajo de 1 mil pico‑pico y de los rotores de 2 polos por debajo de ½ mil pico‑pico, ha sido una práctica habitual en los centros de servicio. Por lo tanto, las implicaciones prácticas del cambio de la ISO 1940-1 a la ISO 21940-11 son muy evidentes. Otro impacto, tal vez oculto en la discusión anterior, es que el dato del desplazamiento de una balanceadora con soportes suaves se puede convertir en un Grado de Calidad de Balanceo ISO 21940-11 aplicando una simple fórmula: Desplazamiento (mil pico-pico) × rpm de operación / 752 = Grado de Calidad de Balanceo (Gx.x) de corrección asegura que se cumple la tolerancia en los planos de los rodamientos. Para rotores asimétricos o rotores con planos de corrección externos a los rodamientos, el método de la ISO 1940 se aproxima pero el cumplimiento de la tolerancia no está garantizado. Las normas ISO especifican procedimientos especiales para asignar Uper a los planos de corrección en rotores asimétricos y en configuraciones de rotor especiales. Los centros de servicio deben contar con una copia de la norma aplicable y familiazarse por si mismos con esos procedimientos. l Desplazamiento (mm pico-pico) × rpm de operación / 19101 = Grado de Calidad de Balanceo (Gx.x) Balancee un rotor de 1800 rpm a 1 mil pico-pico y obtendrá un grado G2.39, solo un poco por debajo del G2.5. Balancee un rotor de 3600 rpm a ½ mil pico-pico y obtendrá el mismo resultado, G2.39. Existe cierto problema cuando se balancea un rotor pequeño en una balanceadora con soportes suaves de gran capacidad; digamos un rotor de 50 libras (23 kg) en una máquina con capacidad para 5000 libras (2268 kg). El conjunto de rodillos introduce masa parásita que reduce la respuesta al desbalanceo. Por lo tanto, para estas condiciones se recomiendan conjuntos de rodillos livianos y un balanceo muy por debajo de la tolerancia. Los centros de servicio que prefieran la fórmula tradicional para calcular el Desbalanceo Residual Permisible en los planos de corrección (Uper por ISO 1940-1) pueden hacerlo con confianza en rotores simétricos con planos de corrección en el interior de los rodamientos. Dado que el cambio en los planos de tolerancia solo afecta al desbalanceo residual en cupla y que los planos de los rodamientos serán más sensibles al desbalanceo en cupla, cumplir con la tolerancia en los planos Electrical Apparatus Service Association, Inc. • Copyright © 2017 • www.easa.com • Agosto de 2017 3