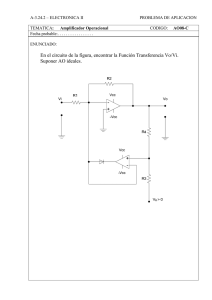
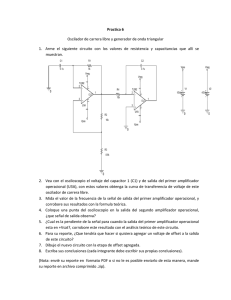
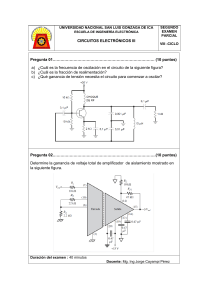
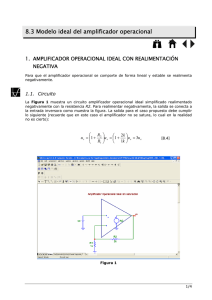
PRACTICA No. 1 INTRODUCCIÓN A LOS SISTEMAS DE CONTROL OBJETIVO: Que el alumno sea capaz de identificar los componentes de un sistema de control. ANTECEDENTES: Para entender la importancia que tiene el estudio de los sistemas de control, basta con mirar a nuestro alrededor y darnos cuenta que en todos los avances de la tecnología existe el control automático, por tanto, es vital estudiar los conceptos básicos, que nos servirán para poder comprender el funcionamiento de cualquier sistema, por difícil y complejo que sea este. Un sistema de control es una interconexión componentes que actúan conjuntamente y cumplen determinado objetivo. la base para el análisis de un sistema es el fundamento proporcionado por la teoría de los sistemas lineales, la cual supone una relación de causa y efecto para los componentes de un sistema. Una planta o proceso que vaya a ser controlado puede presentarse mediante un bloque, en donde la señal es de entrada procesada para proporcionar una señal de salida, frecuentemente con una amplificación de potencia. INVESTIGACIÓN PRELIMINAR ¿Qué es un sistema de control retroalimentado? El control retroalimentado es una operación que, en presencia de perturbaciones, tiende a reducir la diferencia entre la salida de un sistema y alguna entrada de referencia, realizándolo sobre la base de esta diferencia. Un sistema de control es un conjunto de dispositivos encargados de administrar, ordenar, dirigir o regular el comportamiento de otro sistema, con el fin de reducir las probabilidades de fallo y obtener los resultados teóricamente verdaderos. Por lo general, se usan sistemas de control industrial en procesos de producción industriales para controlar equipos o máquinas. Definición planta, proceso, perturbaciones, servomecanismo, entrada, salida, actuador, sensor, transductor, calibración, retroalimentación 1.-Planta Se llama planta al lugar en el que se desarrollan diversas operaciones industriales, entre ellas operaciones unitarias, con el fin de transformar, adecuar o tratar alguna materia prima en particular a fin de obtener productos de mayor valor agregado. 2. –Proceso Procesamiento o conjunto de operaciones a que se somete una cosa para elaborarla o transformarla. 3.-Perturbación Perturbación: es una señal que tiende a afectar el valor de la salida de un sistema. Si la perturbación se genera dentro del sistema se la denomina interna, mientras que una perturbación externa se genera fuera del sistema y constituye una entrada. 4.-Servomecanismo Un servomecanismo es un sistema formado de partes mecánicas y electrónicas que en ocasiones son usadas en robots, con parte móvil o fija. Puede estar formado también de partes neumáticas, hidráulicas y controlado con precisión. 5.- Entrada; Es una variable del sistema tal que una modificación de su magnitud o condición puede alterar el estado del sistema. 6.-Salida; Es una variable del sistema cuya magnitud o condición se mide. 7.- Actuador; Este recibe la orden de un regulador o controlador y en función a ella genera la orden para activar un elemento final de control, como por ejemplo una válvula. Son los elementos que influyen directamente en la señal de salida del automatismo, modificando su magnitud según las instrucciones que reciben de la unidad de control. 8.- Sensor; Un sensor es un objeto capaz de detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas en variables eléctricas. Las variables de instrumentación pueden ser, por ejemplo: intensidad lumínica, temperatura, distancia, aceleración, inclinación, presión, desplazamiento, fuerza, torsión, humedad, movimiento, pH, etc. 9.- Calibración; La calibración es el proceso de comparar los valores obtenidos por un instrumento de medición con la medida correspondiente de un patrón de referencia (o estándar). 10.- Retroalimentación; En un sistema de control, éste tiene entradas y salidas del sistema; cuando parte de la señal de salida reingresa de nuevo, se le llama “realimentación". Definiciones de sistema de lazo abierto y cerrado Sistemas de control en lazo abierto Son aquellos en los que la variable de salida (variable controlada) no tiene efecto sobre la acción de control (variable de control). No se compara la salida del sistema con el valor deseado de la salida del sistema (referencia). Para cada entrada de referencia le corresponde una condición de operación fijada Ejemplo: • Lavadora: – Funciona sobre una base de tiempos – Variable de salida “limpieza de la ropa” no afecta al funcionamiento de la lavadora. Sistema de lazo cerrado Aquellos en los que la señal de salida del sistema (variable controlada) tiene efecto directo sobre la acción de control (variable de control). Sistemas que contienen retroalimentación. Definición: control retroalimentado – Operación que en presencia de perturbaciones tiende a reducir la diferencia entre la salida de un sistema y alguna entrada de referencia. Esta reducción se logra manipulando alguna variable de entrada del sistema, siendo la magnitud de dicha variable de entrada función de la diferencia entre la variable de referencia y la salida del sistema. TRABAJO PRELIMINAR Cada equipo deberá elegir un sistema de control cualquiera (una plancha, una secadora, un cautín, un carro de juguete, etc.) procurando que sea fácil de transportar al laboratorio. Comunicar al catedrático la elección para que no haya duplicidad del tema. Dibujar una rota folio el diagrama esquemático del sistema de control elegido. PRACTICA No. 2 CARACTERISTICAS DEL AMPLIFICADOR OPERACIONAL OBJETIVO: El alumno conocerá las características del amplificador operacional, con el fin de familiarizarse y de obtener mayor provecho del mismo. ANTECEDENTES: El amplificador operacional moderno heredo su nombre del amplificador operacional de alta ganancia diseñado para ejecutar operaciones matemáticas de suma, resta, multiplicación y división. Ahora su bajo costo y reducido tamaño, los hace muy versátiles y de muchas aplicaciones en ingeniería, como: comunicaciones, potencia, instrumentación y desde luego control. Por ese motivo es importante el aprendizaje y buen entendimiento de sus conceptos básicos. No es necesario conocer el funcionamiento interno del circuito para poder utilizarlo en diversas aplicaciones, pero si es indispensable conocer las características de un amplificador operacional ideal, considerando que la mayoría de sus aplicaciones pueden analizarse y diseñarse con estas condiciones, obteniendo errores que pueden ser despreciables, de acuerdo a la aplicación. El amplificador operacional en circuitos de AC y CD o la combinación de ellos, presenta ciertas restricciones. EN CD EN CA -Corriente de operación de entrada -Slew rate -Corriente de offset -Respuesta en frecuencia -Voltaje de offset INVESTIGACION PRELIMINAR: 1. Dibuje el símbolo de OPAMP 741: 2. Dibuje la representación física del OPAMP 741, con la descripción de cada uno de sus pines. 3. Dibujar el diagrama esquemático del un OPAMP que muestre las etapas básicas Etapa de entrada, intermedia y salida 4. Cuales el rango usual de corriente de salida del amplificador operacional: La corriente de entrada y la corriente de salida son cero. 5 ¿Qué es el voltaje de saturación y de que depende? (realizar la gráfica correspondiente): El voltaje de saturación es el voltaje máximo que proporciona el amplificador operacional y depende de los voltajes de las fuentes de alimentación, es decir es igual al máximo del voltaje aplicado tanto en voltaje positivo como en voltaje negativo. El voltaje máximo recomendado para el LM 741 es -15 a +15 volts. 6. Dibujar el modelo ideal del amplificador operacional. 6. Características del amplificador operacional. Características del Amplificador operacional ideal Infinita ganancia en lazo abierto Infinita resistencia de entrada, Corriente de entrada cero. Voltaje de desequilibrio de entrada cero. Infinito rango de voltaje disponible en la salida. Infinito ancho de banda con desplazamiento de fase cero. Rapidez de variación de voltaje infinita. Resistencia de salida cero. Ruido cero. Infinito rechazo de modo común (CMRR) Infinito factor de rechazo a fuente de alimentación (PSRR). Características Amplificador operacional real. Ganancia en lazo abierto, para corriente continua, desde 100.000 hasta más de 1.000.000. Resistencia de entrada finita, desde 0,3 MΩ en adelante. Resistencia de salida no cero. Corriente de entrada no cero, generalmente de 10 nA en circuitos de tecnología bipolar. Voltaje de desequilibrio de entrada no cero, en ciertos dispositivos es de ±15 mV Rechazo de modo común no infinito, aunque grande, en algunos casos, de 80 a 95 dB. Rechazo a fuente de alimentación no infinito. Características afectadas por la temperatura de operación. Deriva de las características, debido al envejecimiento del dispositivo. Ancho de banda finito, limitado a propósito por el diseño o por características de los materiales. Presencia de ruido térmico. Presencia de efectos capacitivos en la entrada por la cercanía de los terminales entre sí. Corriente de salida limitada. Potencia disipada limitada. IMPEDANCIA DE ENTRADA Ri IMPEDANCIA DE SALIDA Ro GANANCIA DE VOLTAJE MODO DIFERENCIAL Ao GANANCIA DE VOLTAJE MODO COMUN ANCHO DE BANDA BW CORRIENTE DE POLARIZACION DE ENTRADA Ii VOLTAJE DE REFERENCIA Vd FACTOR DE RECHAZO DE MODO COMUN CMRR REAL 2MΩ 75MΩ ±15 V ±15 V 1MHz 20nA 1V 90 dB IDEAL ∞ 0 ∞ 0 ∞ 0 0 ∞