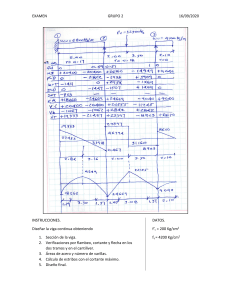
")
ANÁLISIS DE ESFUERZOS
JUAN P. CASTILLO A.
1
PROLOGO
El material que contiene este documento, ha sido preparado con el objeto de
ser utilizado en los primeros cursos de Resistencia de Materiales y de Análisis
de Esfuerzos, que se imparten a los estudiantes del área de Ingeniería
Mecánica.
Para cursar dichas asignaturas, es imprescindible tener el conocimiento y
manejo adecuado de algunas Ciencias Básicas, tales como Física, Cálculo,
Estática, entre otras.
Al final de cada Artículo de un Capítulo, se indica la conveniencia de que el
docente presente y desarrolle en clases, problemas concernientes a la
materia del artículo. Por otra parte, se recomienda al estudiante que
enfrente la resolución de la mayor cantidad posible de los problemas que se
encuentran en los diferentes textos de la materia.
Un reconocimiento especial por la apreciada colaboración del alumno ayudante, Sr. Daniel Aracena Martínez.
Ing. Juan Castillo Álvarez
Profesor Titular
Escuela de Ingeniería Mecánica
Pontificia Universidad Católica de Valparaíso
2020
2
3
ÍNDICE
1
2
3
4
ANÁLISIS DE ESFUERZOS: CONCEPTOS Y DEFINICIONES GENERALES .......................................5
1.1
CLASIFICACIÓN DE LAS CARGAS ........................................................................................5
1.2
CONCEPTO DE ESFUERZO. ESFUERZO NORMAL Y ESFUERZO CORTANTE. ........................7
1.3
ESTADO PLANO DE ESFUERZOS. ........................................................................................9
1.4
ESFUERZOS EN PLANOS OBLICUOS. .................................................................................11
1.5
ESFUERZOS PRINCIPALES. ................................................................................................12
1.6
CÍRCULO DE MOHR PARA ESTADO DE ESFUERZOS PLANOS. ..........................................17
1.7
CONCEPTO DE DEFORMACIÓN: DEFORMACIÓN NORMAL Y CORTANTE. ......................21
1.8
LEY DE HOOKE. .................................................................................................................22
PROPIEDADES MECÁNICAS......................................................................................................27
2.1
ENSAYOS MECÁNICOS: DIAGRAMA ESFUERZO – DEFORMACIÓN UNITARIA. ................27
2.2
ESFUERZO ADMISIBLE. FACTOR DE SEGURIDAD. ............................................................32
2.3
MIEMBROS AXIALES ESTÁTICAMENTE INDETERMINADOS. ............................................33
2.4
EFECTO TÉRMICO. ............................................................................................................33
2.5
RECIPIENTES DE PAREDES DELGADAS SOMETIDOS A PRESIÓN INTERNA. .....................35
2.5.1
RECIPIENTES CILÍNDRICOS. ......................................................................................36
2.5.2
RECIPIENTES ESFÉRICOS. ..........................................................................................37
CARGAS TORSIONALES ............................................................................................................38
3.1
ESFUERZO CORTANTE POR TORSIÓN. TRANSMISIÓN DE POTENCIA. .............................38
3.2
DEFORMACIONES POR TORSIÓN. ....................................................................................42
3.3
ESFUERZOS EN PLANOS OBLICUOS. .................................................................................43
3.4
MIEMBROS ESTÁTICAMENTE INDETERMINADOS. ..........................................................43
CARGAS FLEXIONANTES ..........................................................................................................44
4.1
VIGAS. ..............................................................................................................................44
4.2
ESFUERZOS DEBIDO A LA FLEXIÓN. .................................................................................46
4.3
DIAGRAMAS DE FUERZA CORTANTE Y MOMENTO FLECTOR. .........................................47
4.4
RELACIÓN ENTRE CARGA, FUERZA CORTANTE Y MOMENTO FLECTOR. .........................48
4.5
FÓRMULA DE LA FLEXIÓN. ...............................................................................................49
4.6
FÓRMULA DEL ESFUERZO CORTANTE. ............................................................................51
4.7
DEFLEXIONES DEBIDO A CARGAS FLEXIONANTES. ..........................................................53
4.8
MÉTODO DE DOBLE INTEGRACIÓN. ................................................................................55
4
4.9
MÉTODO DE FUNCIONES DE SINGULARIDAD. .................................................................56
4.10
MÉTODO DE MOMENTOS DE ÁREA. ................................................................................58
Teorema 1 ................................................................................................................................59
Teorema 2 ................................................................................................................................60
4.11
MÉTODO DE SUPERPOSICIÓN. ........................................................................................61
4.12
VIGAS ESTÁTICAMENTE INDETERMINADAS. ...................................................................62
5
CARGAS COMBINADAS ............................................................................................................64
6
PANDEO ...................................................................................................................................66
6.1
COLUMNAS CON CARGAS AXIALES EXCÉNTRICAS. .........................................................66
6.2
EFECTO DE LAS CONDICIONES DE LOS EXTREMOS. .........................................................71
6.3
FÓRMULAS EMPÍRICAS PARA COLUMNAS ......................................................................72
6.4
FÓRMULA DE LA INTERACCIÓN .......................................................................................73
5
1
ANÁLISIS DE ESFUERZOS: CONCEPTOS Y DEFINICIONES GENERALES
El objetivo del Análisis de Esfuerzos o Resistencia de los Materiales, es
desarrollar las relaciones entre cargas externas aplicadas a un cuerpo
deformable, con las fuerzas internas resultantes (las que generan
“esfuerzos”) y las deformaciones originadas.
El diseño de cualquier estructura o máquina puede estar limitado por un
esfuerzo máximo especificado o por una deformación máxima especificada,
conforme a las propiedades de los materiales que se emplean y a la
funcionabilidad esperada.
1.1 CLASIFICACIÓN DE LAS CARGAS
Un cuerpo puede estar sometido a diversos tipos de cargas externas, las que
se clasifican:
a)
con respecto al tiempo de aplicación
- Carga estática: se aplica gradualmente, alcanzando el equilibrio en un
tiempo relativamente corto.
- Carga sostenida: es constante durante un periodo de tiempo largo.
- Carga instantánea: se aplica rápidamente (impacto) y normalmente
produce vibraciones.
- Carga repetida: se aplica y remueve durante muchos ciclos.
6
b)
con respecto a la zona sobre la que se aplican
- Carga distribuida: es la que está repartida en una cierta longitud o sobre el
área de una superficie.
La distribución de la carga puede ser uniforme o no uniforme.
- Carga concentrada: es la que se aplica en un área relativamente pequeña,
de modo que puede suponerse aplicada en un punto.
c)
con respecto al lugar y modo de aplicación
- Carga axial: es aquella que pasa por el centroide de la sección resistente y
actúa en forma perpendicular a ella.
- Carga cortante (transversal): es aquella que pasa por el centroide de la
sección resistente y actúa en forma paralela o tangente a ella.
7
- Carga torsional: es aquella que está formada por un par que tiende a torcer
el elemento.
Cuando el par está en un plano transversal al eje del elemento, se tiene
torsión pura.
- Carga flexionante: es aquella que se aplica transversalmente con respecto
al eje longitudinal del elemento.
1.2 CONCEPTO DE ESFUERZO. ESFUERZO NORMAL Y ESFUERZO CORTANTE.
Se define esfuerzo a la fuerza interna resultante por unidad de superficie.
Considere un elemento cargado axialmente como se indica, y analice los
esfuerzos en la sección A-A:
8
Si se escoge un sistema de coordenadas ortogonales n – t, con ejes normales
y tangenciales al plano de referencia A-A, puede descomponerse la fuerza P
en componentes N y V según estos ejes.
Estas fuerzas originan sobre la sección resistente A-A un esfuerzo normal
(de tensión o compresión) que se designa por σ, y un esfuerzo tangencial o
de corte que se designa por τ.
Si la sección resistente tiene un área conocida A, entonces los esfuerzos
serán:
𝜎=
𝑁 𝑃 ∙ 𝑐𝑜𝑠(𝜃)
=
𝐴
𝐴
𝜏=
𝑉 𝑃 ∙ 𝑠𝑖𝑛(𝜃)
=
𝐴
𝐴
Nótese que si se varía el ángulo θ, es decir, la inclinación de la sección
resistente, las componentes N y V variarán, con lo cual también variarán los
esfuerzos normales y de corte; es decir que los esfuerzos sobre un punto de
un plano, dependen del punto considerado y de la orientación del plano que
pasa por el punto.
Las unidades en que se expresan los esfuerzos dependen de las unidades del
sistema que se emplee en el análisis. Las más comunes son:
Pascal (Pa) = [N / m2]
(Problemas)
; [kp/cm2]
; [lb/in2]
9
1.3 ESTADO PLANO DE ESFUERZOS.
Considere una partícula de un cuerpo sometido a un estado general de
esfuerzos como se indica:
En este elemento, los esfuerzos normales se representan por σ y son
positivos si tienen el sentido y dirección de la normal (o perpendicular) del
plano sobre el que actúan, de tal modo que un esfuerzo de tracción es
positivo y un esfuerzo de compresión es negativo.
Los esfuerzos de corte se representan por τ y tienen doble índice: el primer
índice indica el eje que es normal al plano donde actúa y el segundo índice
indica la dirección del esfuerzo de corte.
Por ejemplo, τxy es el esfuerzo de corte que actúa en un plano perpendicular
al eje ‘x’ ( plano y – z ) y en dirección del eje ‘y’.
El esfuerzo de corte es positivo si actúa sobre un plano cuya normal coincide
con el sentido positivo (o negativo) de su eje y apunta en sentido positivo (o
negativo) del eje al cual es paralelo.
10
Si todos los esfuerzos en una dirección son nulos, entonces se tiene un
estado plano de esfuerzos. (Dado que el sistema de coordenadas se elige
arbitrariamente, es costumbre considerar los esfuerzos en dirección ‘z’ nulos,
es decir, σz = τxz = τyz = 0 )
Con esta consideración se tendrá:
Dado que el cuerpo está en equilibrio, el conjunto de fuerzas que actúa sobre
cada partícula debe estar también en equilibrio.
Haciendo suma de momentos con respecto al eje ‘z’:
𝜏𝑥𝑦 𝑑𝑦𝑑𝑧(𝑑𝑥) − 𝜏𝑦𝑥 𝑑𝑥𝑑𝑧(𝑑𝑦) = 0
→
𝜏𝑥𝑦 = 𝜏𝑦𝑥
Generalizando:
𝜏𝑥𝑦 = 𝜏𝑦𝑥
𝜏𝑥𝑧 = 𝜏𝑧𝑥
𝜏𝑦𝑧 = 𝜏𝑧𝑦
Luego, los esfuerzos cortantes sobre dos planos ortogonales
(perpendiculares) que pasan por un mismo punto, son iguales en magnitud y
de sentido contrario.
11
1.4 ESFUERZOS EN PLANOS OBLICUOS.
Considérese una partícula en un estado plano (bidimensional) general de
esfuerzos, y determínese los esfuerzos normales y de corte sobre un plano
inclinado cualquiera de área dA , determinado por el ángulo θ ( que es
positivo en sentido anti-horario ).
Escogiendo un sistema de coordenadas n – t , de tal modo que el eje ‘n’ es
normal al plano inclinado y el eje ‘t’ es tangente al plano, se tendrá del
diagrama de cuerpo libre de la sección de la izquierda:
∑ 𝐹𝑛 = 0
𝜎𝑛 𝑑𝐴 − 𝜎𝑥 𝑑𝐴 cos(𝜃) [cos(𝜃)] − 𝜏𝑥𝑦 𝑑𝐴 cos(𝜃) [sin(𝜃)]
− 𝜎𝑦 𝑑𝐴 sin(𝜃) [sin(𝜃)] − 𝜏𝑥𝑦 𝑑𝐴 sin(𝜃) [cos(𝜃)] = 0
𝜎𝑛 = 𝜎𝑥 cos2 (𝜃) + 𝜎𝑦 sin2 (𝜃) + 2𝜏𝑥𝑦 sin(𝜃) 𝑐𝑜𝑠(𝜃)
La que por transformaciones trigonométricas puede escribirse como:
𝜎𝑛 =
𝜎𝑥 + 𝜎𝑦 𝜎𝑥 − 𝜎𝑦
+
cos(2𝜃) + 𝜏𝑥𝑦 sin(2𝜃)
2
2
(∗)
12
∑ 𝐹𝑡 = 0
𝜏𝑛𝑡 𝑑𝐴 + 𝜎𝑥 𝑑𝐴 cos(𝜃) [sin(𝜃)] − 𝜏𝑥𝑦 𝑑𝐴 cos(𝜃) [cos(𝜃)]
− 𝜎𝑦 𝑑𝐴 sin(𝜃) [cos(𝜃)] + 𝜏𝑥𝑦 𝑑𝐴 sin(𝜃) [sin(𝜃)] = 0
𝜏𝑛𝑡 = 𝜎𝑦 sin(𝜃) cos(𝜃) − 𝜎𝑥 sin(𝜃) cos(𝜃) + 𝜏𝑥𝑦 cos2 (𝜃) − 𝜏𝑥𝑦 sin2 (𝜃)
La que por transformaciones trigonométricas puede escribirse como:
𝜏𝑛𝑡 = −
𝜎𝑥 − 𝜎𝑦
sin(2𝜃) + 𝜏𝑥𝑦 cos(2𝜃)
2
(∗∗)
Las ecuaciones (*) y (**) dan los esfuerzos normales y de corte sobre un
plano inclinado, cuya normal forma un ángulo θ con el eje ‘x’.
Nota.- Recuérdese que estas ecuaciones han sido deducidas a partir de un
elemento en que todos los esfuerzos son positivos y que el ángulo θ es
positivo cuando se mide, a partir del eje ‘x’ hacia la normal al plano
considerado, en sentido anti-horario; por lo tanto, para cada elemento
particular que se tenga, los valores involucrados deben reemplazarse con su
magnitud y signo en estas ecuaciones.
1.5 ESFUERZOS PRINCIPALES.
Se vió que σn y τnt son funciones de la variable θ ; por lo tanto, para
valores dados de σx , σy , τxy , habrán valores particulares de θ que hagan
que σn y τnt tomen sus valores máximos y mínimos.
El máximo y mínimo esfuerzo normal en un punto de un cuerpo, reciben el
nombre de “esfuerzos principales” ( que se designan por σp ) y los planos
sobre los que actúan se llaman “planos principales” ( definidos por θp ).
σn es máximo o mínimo para dσn / dθ = 0
El valor de θ que satisface esta ecuación define los planos principales.
13
Derivando la ecuación (*) con respecto a θ:
𝑑𝜎𝑛
= −(𝜎𝑥 − 𝜎𝑦 ) sin(2𝜃) + 2 𝜏𝑥𝑦 cos(2𝜃)
𝑑𝜃
Igualando a cero y despejando:
𝜏𝑥𝑦
tan(2𝜃𝑝 ) = 𝜎 − 𝜎
𝑥
𝑦
2
Existen dos valores de 2θp que satisfacen esta ecuación, los cuales se
diferencian en 180º , es decir, existen dos valores de θp diferenciados en
90º. Uno de estos valores define el plano de máximo esfuerzo normal y el
otro, define el plano de mínimo esfuerzo normal; esto prueba que los planos
principales son perpendiculares entre sí.
Nótese que además,
𝑑𝜎𝑛
= 2𝜏𝑛𝑡
𝑑𝜃
Esto demuestra que en los planos principales, el esfuerzo de corte es cero.
Sustituyendo en la ecuación (*) los valores de θp obtenidos, se tendrán los
esfuerzos normales máximo y mínimo.
Sea
𝜎𝑥 − 𝜎𝑦 2
2
√
𝐶= (
) + 𝜏𝑥𝑦
2
𝜎𝑥 − 𝜎𝑦
cos(2𝜃𝑝 ) = (
)⁄𝐶
sin(2𝜃𝑝 ) = 𝜏𝑥𝑦 ⁄𝐶
2
𝜎𝑥 + 𝜎𝑦 𝜎𝑥 − 𝜎𝑦
𝜎𝑛 =
+
cos(2𝜃) + 𝜏𝑥𝑦 sin(2𝜃)
(∗)
2
2
14
Sustituyendo y arreglando, se logra:
𝜎𝑥 + 𝜎𝑦
𝜎𝑥 − 𝜎𝑦 2
2
𝜎𝑝 =
± √(
) + 𝜏𝑥𝑦
2
2
Esta ecuación da los esfuerzos principales referidos al plano x-y.
En realidad, los esfuerzos principales son tres: uno máximo, uno intermedio,
y uno mínimo. Para un estado plano de esfuerzos, uno de ellos es cero.
Por convención, se considera que el más positivo es el esfuerzo máximo,
mientras que el más negativo es el esfuerzo mínimo, independientemente de
sus magnitudes.
La condición 𝑑 2 𝜎𝑛 ⁄𝑑𝜃 2 define los planos donde actúan el esfuerzo máximo
y el esfuerzo mínimo; si al reemplazar un valor de θp en esta expresión se
obtiene un valor negativo ( o positivo ) , implica que en ese plano actúa el
esfuerzo máximo ( o el mínimo ).
𝑑 2 𝜎𝑛
= −2(𝜎𝑥 − 𝜎𝑦 ) cos(2𝜃) − 4 𝜏𝑥𝑦 sin(2𝜃)
𝑑𝜃 2
Otra forma de determinar en qué plano actúa el esfuerzo normal máximo o
mínimo, es sustituir un valor de θp en la ecuación (*) y debe obtenerse un
valor de σn que coincidirá con el esfuerzo máximo o con el esfuerzo mínimo.
τnt es máximo o mínimo para dτnt / dθ = 0
El valor de θ que satisface esta ecuación define los planos donde actúan los
esfuerzos cortantes máximos y mínimos.
Derivando la ecuación (**) con respecto a θ:
𝑑𝜏𝑛𝑡
= −(𝜎𝑥 − 𝜎𝑦 ) cos(2𝜃) − 2 𝜏𝑥𝑦 sin(2𝜃)
𝑑𝜃
15
Igualando a cero y despejando:
𝜎𝑥 − 𝜎𝑦
2
tan(2𝜃𝑡 ) = −
𝜏𝑥𝑦
Comparando las ecuaciones que definen los planos principales de esfuerzo
normal y de esfuerzo cortante, se observa que son tangentes recíprocas
negativas, es decir, 2θp y 2θτ se diferencian en 90º y en consecuencia, θp
y θτ se diferencian en 45º ; por lo tanto, los esfuerzos cortantes máximos y
mínimos actúan sobre planos que se encuentran a 45º de los planos
principales.
Sustituyendo en la ecuación (**) los valores de θτ obtenidos, se tendrán los
esfuerzos cortantes máximo y mínimo.
Sea
𝜎𝑥 − 𝜎𝑦 2
2
√
𝐶= (
) + 𝜏𝑥𝑦
2
cos(2𝜃𝑡 ) = 𝜏𝑥𝑦 ⁄𝐶
𝜏𝑛𝑡 = −
𝜎𝑥 − 𝜎𝑦
sin(2𝜃𝑡 ) = − (
) ⁄𝐶
2
𝜎𝑥 − 𝜎𝑦
sin(2𝜃) + 𝜏𝑥𝑦 cos(2𝜃)
2
(∗∗)
Sustituyendo y arreglando, se logra:
𝜎𝑥 − 𝜎𝑦 2
2
𝜏𝑚á𝑥,𝑚í𝑛 = ±√(
) + 𝜏𝑥𝑦
2
Nótese que coincide o corresponde al segundo término de la ecuación de
esfuerzos principales, es decir que esta ecuación da el esfuerzo cortante
máximo que ocurre en el plano (x-y).
16
La condición 𝑑 2 𝜏𝑛𝑡 ⁄𝑑𝜃 2 define los planos de máximo y mínimo esfuerzo
cortante; si al reemplazar un valor de θτ en esta expresión se obtiene un
valor negativo ( o positivo ) , implica que en ese plano actúa el esfuerzo
cortante máximo ( o mínimo ).
𝑑 2 𝜏𝑛𝑡
= 2(𝜎𝑥 − 𝜎𝑦 ) sin(2𝜃) − 4 𝜏𝑥𝑦 cos(2𝜃)
𝑑𝜃 2
Otra forma de determinar en qué plano actúa el esfuerzo cortante máximo o
mínimo, es sustituir un valor de θτ en la ecuación (**) y debe obtenerse un
valor de τnt que coincidirá con el esfuerzo cortante máximo o con el esfuerzo
cortante mínimo.
Importante .- El máximo esfuerzo cortante es igual a la mitad de la diferencia
entre el máximo y el mínimo de los esfuerzos principales, y actúa en un plano
que bisecta los planos de esfuerzos normales máximo y mínimo.
𝜏𝑚á𝑥 =
𝜎𝑚á𝑥 − 𝜎𝑚í𝑛
2
Se pueden entonces presentar tres situaciones, a saber:
a) σp1 ^ σp2 son de signos contrarios , es decir,
σp3 = 0 es un valor intermedio, y efectivamente σp1 será el esfuerzo
máximo y σp2 será el esfuerzo mínimo, con lo cual:
𝜏𝑚á𝑥
𝜎𝑥 − 𝜎𝑦 2
𝜎𝑚á𝑥 − 𝜎𝑚í𝑛 |𝜎𝑝1 | + |𝜎𝑝2 |
2
=
=
= √(
) + 𝜏𝑥𝑦
2
2
2
b) σp1 ^ σp2 son del mismo signo, y | σp1| > | σp2|
Si ambos son positivos, entonces σp3 = 0 es en realidad el esfuerzo
mínimo y σp1 será el esfuerzo máximo .
Si ambos son negativos, entonces σp3 = 0 es en realidad el esfuerzo
máximo y σp1 será el esfuerzo mínimo, con lo cual :
𝜏𝑚á𝑥 =
𝜎𝑝1
2
17
c) σp1 ^ σp2 son del mismo signo, y | σp1| < | σp2|
Si ambos son positivos, entonces σp3 = 0 es en realidad el esfuerzo
mínimo y σp2 será el esfuerzo máximo .
Si ambos son negativos, entonces σp3 = 0 es en realidad el esfuerzo
máximo y σp2 será el esfuerzo mínimo, con lo cual:
𝜏𝑚á𝑥 =
𝜎𝑝2
2
Por lo tanto, todas las ecuaciones deducidas anteriormente, en lo que
respecta a esfuerzos máximos y mínimos, se refieren a esfuerzos sobre
planos oblicuos que están en el plano x-y , y que cuando σp1 ^ σp2 son de
signo contrario, coinciden o corresponden a los esfuerzos normales máximos
y mínimos sobre el elemento estructural.
( Problemas )
1.6 CÍRCULO DE MOHR PARA ESTADO DE ESFUERZOS PLANOS.
Es una representación gráfica de las ecuaciones y teoría desarrollada.
Corresponde a un círculo, en el cual las coordenadas de cada punto del
círculo representan los esfuerzos normales y de corte en un punto sobre un
determinado plano, el cual queda definido por el ángulo doble entre la
normal al plano y el eje ‘x’.
18
Su representación se efectúa con una escala conveniente, empleando el
siguiente convenio de signos:
Esfuerzo normal de tracción: positivo
Esfuerzo normal de compresión: negativo
Esfuerzo cortante que produce momento horario: positivo
Esfuerzo cortante que produce momento anti-horario: negativo
Angulo medido en sentido anti-horario: positivo
Angulo medido en sentido horario: negativo
Considérese una partícula en estado general de esfuerzos planos, y
supóngase que σx > σy :
19
Las coordenadas del punto V representan los esfuerzos sobre el plano
vertical que pasa por el punto, y las coordenadas del punto H son los
esfuerzos sobre el plano horizontal ; por lo tanto,
el trazo CV corresponde al eje ‘x’ ( que es el normal al plano vertical ) y el
trazo CH corresponde al eje ‘y’ ( que es el normal al plano horizontal ).
Nótese que estos ejes están realmente a 90º , pero en el círculo de Mohr
están a 180º ya que en el círculo todos los ángulos son el doble de los
reales.
Dado que generalmente los ángulos se miden a partir del eje ‘x’ , en el círculo
de Mohr se medirán desde el trazo CV para obtener los esfuerzos normales
y de corte en un cierto plano de referencia.
Se demostrará que las relaciones obtenidas del círculo, coinciden con las
ecuaciones deducidas anteriormente:
𝑂𝐹 ′ = 𝑂𝐶 + 𝐶𝐹 ∙ cos(2𝜃𝑝 − 2𝜃)
Pero,
𝐶𝐹 = 𝐶𝑉 = 𝐶𝐷 = 𝐶𝐸
𝑂𝐹 ′ = 𝑂𝐶 + 𝐶𝑉 cos(2𝜃𝑝 ) cos(2𝜃) + 𝐶𝑉 sin(2𝜃𝑝 ) sin(2𝜃)
Además,
𝐶𝑉 cos(2𝜃𝑝 ) = 𝐶𝑉 ′
𝐶𝑉 sin(2𝜃𝑝 ) = 𝑉𝑉′
𝑂𝐹 ′ = 𝑂𝐶 + 𝐶𝑉 ′ cos(2𝜃) + 𝑉𝑉′ sin(2𝜃)
𝑂𝐹 ′ =
𝜎𝑥 + 𝜎𝑦 𝜎𝑥 − 𝜎𝑦
+
cos(2𝜃) + 𝜏𝑥𝑦 sin(2𝜃) ≡ 𝜎𝑛
2
2
Como la abscisa de cada punto sobre el círculo representa un valor particular
de σn , es obvio que éste será máximo en el punto D y mínimo en el punto
E , por lo tanto :
𝑂𝐷 = 𝑂𝐶 + 𝐶𝐷 = 𝑂𝐶 + 𝐶𝑉
𝑂𝐷 =
𝜎𝑥 + 𝜎𝑦
𝜎𝑥 − 𝜎𝑦 2
2 ≡𝜎
+ √(
) + 𝜏𝑥𝑦
𝑝1
2
2
20
𝑂𝐸 = 𝑂𝐶 − 𝐶𝐸 = 𝑂𝐶 − 𝐶𝑉
𝜎𝑥 + 𝜎𝑦
𝜎𝑥 − 𝜎𝑦 2
2 ≡𝜎
√
𝑂𝐸 =
− (
) + 𝜏𝑥𝑦
𝑝2
2
2
𝐹𝐹 ′ = 𝐶𝐹 sin(2𝜃𝑝 − 2𝜃)
𝐹𝐹 ′ = 𝐶𝑉 sin(2𝜃𝑝 ) cos(2𝜃) − 𝐶𝑉 cos(2𝜃𝑝 ) sin(2𝜃)
Además,
𝐶𝑉 sin(2𝜃𝑝 ) = 𝑉𝑉 ′
𝐶𝑉 cos(2𝜃𝑝 ) = 𝐶𝑉 ′
𝐹𝐹 ′ = 𝑉𝑉′ cos(2𝜃) − 𝐶𝑉 ′ sin(2𝜃)
𝜎𝑥 − 𝜎𝑦
𝐹𝐹 ′ = −
sin(2𝜃) + 𝜏𝑥𝑦 cos(2𝜃) ≡ 𝜏𝑛𝑡
2
Como la ordenada de cada punto sobre el círculo representa un valor
particular de τnt , es obvio que éste será máximo en el punto B y mínimo
en el punto A , por lo tanto :
𝐶𝐵 = 𝐶𝐴 = 𝐶𝑉
𝜎𝑥 − 𝜎𝑦 2
2 ≡𝜏
√
𝐶𝐵 = 𝐶𝐴 = (
) + 𝜏𝑥𝑦
𝑚á𝑥,𝑚í𝑛
2
Además se cumple que:
𝜏𝑥𝑦
tan(2𝜃𝑝 ) = 𝜎 − 𝜎
𝑥
𝑦
2
Nótese que CD es el eje normal al plano de máximo esfuerzo normal, y que
CB es el eje normal al plano de máximo esfuerzo cortante, y se encuentran a
90º en el círculo de Mohr, es decir, realmente se diferencian en 45º , como
se dedujo anteriormente.
Además, las coordenadas de los puntos D y E dan los esfuerzos normales y
de corte en el plano principal máximo y mínimo respectivamente, y que en
estos planos el esfuerzo de corte es nulo, como se dedujo anteriormente.
( Problemas )
21
1.7 CONCEPTO DE DEFORMACIÓN: DEFORMACIÓN NORMAL Y CORTANTE.
Se denomina deformación al cambio de cualquiera de las dimensiones de un
cuerpo cargado.
Se define deformación unitaria normal , ε , a la deformación por unidad de
longitud.
𝜀=
𝛿𝑛
𝐿
Se define deformación unitaria cortante, 𝛾 , al cambio de ángulo entre dos
planos que en el material no cargado son
ortogonales.
𝛾=
𝛿𝑠
𝐿
Nótese que ε es deformación dividida por una longitud, la cual es paralela a
la deformación ocurrida, mientras que γ es deformación dividida por una
longitud la cual es perpendicular a la deformación producida. Ambas
deformaciones unitarias son adimensionales.
Para el caso de elementos sometidos a un estado general de esfuerzos
planos, estas definiciones son más complejas ya que las deformaciones son
siempre en tres dimensiones, excepto en aquellos casos en que existan
restricciones a la deformación en ciertas direcciones. Se tendrá entonces que
un elemento de forma rectangular se deformará como se indica:
22
Designando por εn la deformación unitaria normal en la dirección ‘n’ , se
obtiene por relaciones geométricas y trigonométricas :
𝜀𝑛 =
𝜀𝑥 + 𝜀𝑦 𝜀𝑥 − 𝜀𝑦
𝛾𝑥𝑦
+
cos(2𝜃) +
sin(2𝜃)
2
2
2
La semejanza entre esta ecuación y la ecuación de esfuerzos normales,
ecuación (*) , permite inferir que todas las ecuaciones de esfuerzos
deducidas anteriormente pueden aplicarse al cálculo de deformaciones
unitarias reemplazando los esfuerzos normales ( σ ) por las deformaciones
unitarias normales correspondientes ( ε ) y los esfuerzos cortantes ( τ ) por el
valor medio de la deformación unitaria cortante correspondiente ( γ / 2 ).
Consecuentemente, la deformación unitaria cortante máxima estará dada
por:
𝛾𝑚á𝑥 𝜀𝑝1 − 𝜀𝑝2
=
2
2
Las deformaciones unitarias normales debido a tracción se consideran
positivas y las deformaciones unitarias cortantes se consideran positivas
cuando disminuye el ángulo entre los planos ortogonales que pasan por el
origen de coordenadas.
Si las deformaciones unitarias en una dirección son nulas, entonces se dice
que el elemento está en deformación plana. ( en general, esto requiere que
σz ≠ 0 ).
1.8 LEY DE HOOKE.
Conociendo las deformaciones en ciertas direcciones, pueden evaluarse los
esfuerzos por medio de ecuaciones conocidas como “Ley de Hooke”, que da
relaciones entre esfuerzos y deformaciones, las cuales han sido deducidas de
resultados experimentales.
Estas relaciones son válidas para algunos materiales dentro de ciertos límites
de esfuerzos.
23
Cuando un material es cargado en una dirección, experimenta deformaciones
en direcciones paralelas y perpendiculares a la línea de acción de la carga.
Dentro de ciertos límites de esfuerzos, esta relación es constante para la
mayoría de los metales, y se conoce como “Relación de Poisson” ( ν ).
𝜈=
𝜀𝑙𝑎𝑡𝑒𝑟𝑎𝑙
𝜀𝑙𝑜𝑛𝑔𝑖𝑡𝑢𝑑𝑖𝑛𝑎𝑙
=
𝜀𝑑𝑖𝑟𝑒𝑐𝑐𝑖ó𝑛 𝑛𝑜𝑟𝑚𝑎𝑙 𝑎 𝑙𝑎 𝑐𝑎𝑟𝑔𝑎
𝜀𝑑𝑖𝑟𝑒𝑐𝑐𝑖ó𝑛 𝑑𝑒 𝑙𝑎 𝑐𝑎𝑟𝑔𝑎
Para los aceros, la relación de Poisson varía de 1/4 a 1/3 .
Considérese un elemento sometido a un estado biaxial de esfuerzos, dentro
del límite en que es válida la ley de Hooke, y por superposición de los casos
individuales que se indican, se obtiene la configuración final resultante:
𝛿𝑥 = 𝜀𝑥 𝑑𝑥 − 𝜈 𝜀𝑦 (1 + 𝜀𝑥 ) 𝑑𝑥
𝛿𝑥 = 𝜀𝑥 𝑑𝑥 − 𝜈 𝜀𝑦 𝑑𝑥 − 𝜈 𝜀𝑦 𝜀𝑥 𝑑𝑥
Despreciando el término de segundo orden, resulta:
𝛿𝑥 = 𝜀𝑥 𝑑𝑥 − 𝜈 𝜀𝑦 𝑑𝑥
Pero, dentro del límite en que es válida la ley de Hooke, se cumple una
proporcionalidad entre la carga y la deformación total, es decir, entre el
esfuerzo y la deformación unitaria, dada por una constante E, llamada
Módulo de Elasticidad para los esfuerzos normales, y por una constante G,
llamada Módulo de Rigidez para los esfuerzos cortantes.
24
Luego,
𝐸=
𝜎
𝜀
𝐺=
𝜏
𝛾
Nótese que los módulos de elasticidad y de rigidez tienen las mismas
unidades dimensionales que los esfuerzos, ya que las deformaciones
unitarias son adimensionales.
Considerando materiales isotrópicos , que son aquellos que tienen las
mismas propiedades en todas las direcciones, se tendrá que :
𝜀𝑥 =
𝜎𝑥
𝐸
𝜀𝑦 =
𝜎𝑦
𝐸
Luego, sustituyendo:
𝛿𝑥 =
𝜎𝑦
𝜎𝑥
𝑑𝑥 − 𝜈
𝑑𝑥
𝐸
𝐸
Pero por definición,
𝛿𝑥 = 𝜀𝑥 𝑑𝑥
Luego entonces,
𝜀𝑥 =
En la dirección ‘y’ :
1
(𝜎 − 𝜈 𝜎𝑦 )
𝐸 𝑥
𝛿𝑦 = 𝜀𝑦 (1 − 𝜈 𝜀𝑥 ) 𝑑𝑦 − 𝜈 𝜀𝑥 𝑑𝑦
𝛿𝑦 = 𝜀𝑦 𝑑𝑦 − 𝜈 𝜀𝑥 𝜀𝑦 𝑑𝑦 − 𝜈 𝜀𝑥 𝑑𝑦
Despreciando el término de segundo orden, resulta:
𝛿𝑦 = 𝜀𝑦 𝑑𝑦 − 𝜈 𝜀𝑥 𝑑𝑦
Pero por definición
𝛿𝑦 = 𝜀𝑦 𝑑𝑦
Luego entonces,
𝜀𝑦 =
1
(𝜎 − 𝜈 𝜎𝑥 )
𝐸 𝑦
25
Además, se cumple que:
𝜀𝑧 = −
𝜈
(𝜎 + 𝜎𝑦 )
𝐸 𝑥
Colocando los esfuerzos en función de las deformaciones unitarias, resulta:
𝐸
(𝜀 + 𝜈 𝜀𝑦 )
1 − 𝜈2 𝑥
𝐸
(𝜀 + 𝜈 𝜀𝑥 )
𝜎𝑦 =
1 − 𝜈2 𝑦
𝜎𝑥 =
Generalizando estas ecuaciones al caso triaxial de esfuerzos, se tendrá:
1
[𝜎 − 𝜈(𝜎𝑦 + 𝜎𝑧 )]
𝐸 𝑥
1
𝜀𝑦 = [𝜎𝑦 − 𝜈 (𝜎𝑥 + 𝜎𝑧 )]
𝐸
1
𝜀𝑧 = [𝜎𝑧 − 𝜈(𝜎𝑥 + 𝜎𝑦 )]
𝐸
𝜀𝑥 =
De lo cual resulta:
𝜎𝑥 =
𝐸
[(1 − 𝜈 )𝜀𝑥 + 𝜈(𝜀𝑦 + 𝜀𝑧 )]
(1 + 𝜈 )(1 − 2𝜈 )
𝜎𝑦 =
𝐸
[(1 − 𝜈 )𝜀𝑦 + 𝜈 (𝜀𝑥 + 𝜀𝑧 )]
(1 + 𝜈 )(1 − 2𝜈 )
𝜎𝑧 =
𝐸
[(1 − 𝜈 )𝜀𝑧 + 𝜈(𝜀𝑥 + 𝜀𝑦 )]
(1 + 𝜈 )(1 − 2𝜈 )
Finalmente, considerando un elemento sometido a corte puro, puede
establecerse una relación entre las constantes ingenieriles del material:
26
Para este caso, las magnitudes de los esfuerzos principales, esfuerzo
cortante, y esfuerzo cortante máximo son iguales, es decir
𝜎𝑝1 = 𝜎𝑝2 = 𝜏𝑥𝑦 = 𝜏𝑚á𝑥
Y las deformaciones unitarias normales principales estarán dadas por:
𝜎𝑝1 (1 + 𝜈)
1
(𝜎𝑝1 + 𝜈 𝜎𝑝2 ) =
𝐸
𝐸
𝜎𝑝1 (1 + 𝜈)
1
= (−𝜎𝑝2 + 𝜈 𝜎𝑝1 ) = −
𝐸
𝐸
𝜀𝑝1 =
𝜀𝑝2
Con lo cual
𝜀𝑝1 − 𝜀𝑝2 = 2
𝜎𝑝1 (1 + 𝜈)
𝐸
Y además,
𝛾𝑚á𝑥 =
𝜏𝑚á𝑥
𝐺
→
𝛾𝑚á𝑥 =
Sustituyendo en
𝛾𝑚á𝑥 𝜀𝑝1 − 𝜀𝑝2
=
2
2
𝜎𝑝1 𝜎𝑝1 (1 + 𝜈)
=
2𝐺
𝐸
𝐸
𝐺=
2(1 + 𝜈)
→
Por lo tanto, para los esfuerzos cortantes se tiene:
( Problemas )
𝜏𝑥𝑦 =
𝐸
𝛾
2(1 + 𝜈) 𝑥𝑦
𝜏𝑥𝑧 =
𝐸
𝛾
2(1 + 𝜈) 𝑥𝑧
𝜏𝑦𝑧 =
𝐸
𝛾
2(1 + 𝜈) 𝑦𝑧
𝜎𝑝1
𝐺
27
2
PROPIEDADES MECÁNICAS
2.1 ENSAYOS MECÁNICOS: DIAGRAMA ESFUERZO – DEFORMACIÓN
UNITARIA.
Las propiedades mecánicas se derivan del comportamiento de un material
bajo carga, y se determinan por medio de ensayos mecánicos efectuando
mediciones de carga y deformación, las que a su vez, se expresan en
términos de esfuerzos y deformaciones unitarias.
El ensayo de tracción es el ensayo mecánico de mayor utilidad, en lo que se
refiere a la determinación de las propiedades o características de los
materiales ensayados, para una adecuada aplicación de los mismos en
diseño. En consecuencia, el ensayo puede realizarse sobre probetas de un
cierto material para determinar sus propiedades mecánicas, o bien, sobre
piezas elaboradas para conocer su comportamiento bajo cargas de tracción.
El término ensayo de tracción usualmente se usa para referirse al ensayo en
el cual una probeta preparada es sometida a una carga monoaxial
gradualmente creciente, de modo que la probeta se alarga en la dirección de
la carga aplicada, hasta que se produzca la falla de la probeta.
Durante la ejecución del ensayo, se toman registros de la carga aplicada y de
los alargamientos en una longitud calibrada. Al finalizar el ensayo, se miden
el largo final calibrado y el diámetro final de la probeta en la zona de fractura.
Con esta información se puede construir un diagrama esfuerzo-deformación,
a partir del cual se obtienen las propiedades mecánicas del material
ensayado.
El ensayo de tracción es aplicable a la mayoría de los metales y aleaciones
no-ferrosas, tanto fundidos, laminados o forjados.
Si bien la velocidad de aplicación de la carga tiene un efecto sobre las
propiedades mecánicas de los materiales, el rango de velocidades usadas en
las máquinas de ensayo permite amplias tolerancias sin introducir errores
serios en el ensaye de materiales dúctiles. En todo caso, se recomienda una
velocidad no superior a 5 [mm/min].
28
A efecto de determinar propiedades representativas del material ensayado,
la fractura de la probeta debe ocurrir en el tercio central de la misma; en
caso contrario, solo se obtendrán propiedades asociadas a la probeta
ensayada, y estos resultados no tendrán aplicación ingenieril.
Las propiedades mecánicas que pueden determinarse del ensayo de tracción
son:
Esfuerzo Límite Proporcional: es el mayor esfuerzo que un material puede
desarrollar sin desviarse de la proporcionalidad rectilínea entre el esfuerzo y
la deformación. Dentro del rango elástico, la mayoría de los materiales
presentan una relación lineal entre esfuerzo y deformación, la que es dada
por la Ley de Hooke.
Esfuerzo Límite Elástico: es el mayor esfuerzo que un material puede
desarrollar sin que ocurra deformación permanente al retirar el esfuerzo. La
determinación de este esfuerzo resulta laboriosa y poco práctica, razón por la
cual normalmente no se realiza.
Esfuerzo de Fluencia: es el esfuerzo al cual ocurre un marcado aumento en la
deformación manteniéndose prácticamente constante el esfuerzo aplicado.
Los materiales dúctiles tienen una zona de fluencia definida, mientras que
para materiales que no la presentan se admite que ésta corresponde a una
pequeña deformación plástica especificada, obteniéndose el esfuerzo de
fluencia trazando una paralela a la parte rectilínea del diagrama a 0.002
cm/cm. (0.2%) de deformación permanente.
Esfuerzo Máximo o Último: es el máximo esfuerzo que puede desarrollar un
material, y se calcula en base a las dimensiones originales de una probeta de
ensayo.
𝜎𝑈 =
𝑝𝑚á𝑥
𝐴𝑖𝑛𝑖𝑐𝑖𝑎𝑙
Hasta el momento de alcanzar la carga máxima, el alargamiento de la
probeta es uniforme. Sobrepasado este punto, en los materiales dúctiles
comienza a producirse una estricción localizada, la que continúa hasta que
ocurre la ruptura de la probeta.
29
La ductilidad de un material es su capacidad para soportar una gran
deformación plástica, y simultáneamente sostener una carga apreciable,
antes de romperse. Las medidas representativas usuales de la ductilidad de
un material, son el porcentaje de alargamiento y el porcentaje de estricción,
dados por:
𝐴𝑙𝑎𝑟𝑔𝑎𝑚𝑖𝑒𝑛𝑡𝑜 =
𝐸𝑠𝑡𝑟𝑖𝑐𝑐𝑖ó𝑛 =
Donde,
𝐿𝑓 − 𝐿
∙ 100
𝐿
𝐴 − 𝐴𝑓
∙ 100
𝐴
[%]
[%]
L : longitud inicial tramo calibrado
Lf : longitud final tramo calibrado
A : área inicial probeta
Af : área final probeta
Módulo de Elasticidad o de Young: es una medida de la rigidez del material
en el rango elástico, y corresponde a la pendiente del diagrama esfuerzodeformación en la zona de proporcionalidad. A mayor módulo de elasticidad,
menor será la deformación elástica resultante de la aplicación de un esfuerzo
dado.
𝐸 = tan(𝜙 ) =
Δσ
Δε
Energía Elástica por unidad de volumen: es la capacidad de un material para
absorber energía cuando es deformado hasta su límite elástico. Se conoce
también como Módulo de Resiliencia, y corresponde aproximadamente al
área del diagrama esfuerzo-deformación hasta la zona de proporcionalidad.
𝑈𝑒 =
1
𝜎 𝜀
2 𝐿𝑃
[𝑘𝑝 ∙ 𝑐𝑚⁄𝑐𝑚3 ]
Energía de Ruptura por unidad de volumen: es la cantidad de trabajo
necesaria para provocar la falla del material bajo carga estática, y
corresponde al área total bajo el diagrama esfuerzo-deformación.
30
31
32
2.2 ESFUERZO ADMISIBLE. FACTOR DE SEGURIDAD.
Todo elemento estructural se diseña para cumplir con una determinada
función sin fallar. Para asegurar que los esfuerzos en el elemento no
provoquen la “falla” de éste, el diseño se efectúa con un “esfuerzo admisible
o de trabajo”, teniendo en cuenta un cierto factor de seguridad ‘n’ cuyo valor
depende de las condiciones de trabajo y servicio del elemento.
La determinación del esfuerzo admisible requiere conocer el factor de
seguridad y la propiedad del material en que se basará el diseño.
Generalmente, el diseño está basado en la Resistencia a la fluencia o en la
Resistencia última del material, características que se encuentran tabuladas
para diversos materiales.
Por lo tanto, para esfuerzos normales se tiene:
𝜎𝑎𝑑𝑚 =
𝑆𝑦
𝑛
𝜎𝑎𝑑𝑚 =
𝑆𝑢
𝑛
𝜏𝑎𝑑𝑚 =
𝑆𝑢𝑠
𝑛
Y para esfuerzos cortantes se tiene:
𝜏𝑎𝑑𝑚 =
𝑆𝑦𝑠
𝑛
Resulta obvio que el valor mínimo para el factor de seguridad es 1 , lo que
implicaría que se está en una condición de falla inminente, razón por la cual
normalmente, n > 1
( Problemas )
33
2.3 MIEMBROS AXIALES ESTÁTICAMENTE INDETERMINADOS.
Cuando se tienen miembros estáticamente indeterminados ( más incógnitas
que ecuaciones ) se deben formular ecuaciones adicionales derivadas de la
geometría de las deformaciones producidas.
Es conveniente emplear el siguiente procedimiento:
- dibujar diagrama de cuerpo libre ( todos los que sean necesarios )
- plantear las ecuaciones de equilibrio independientes
- dibujar diagrama de desplazamientos ( en forma lineal )
- obtener relaciones de deformación necesarias
( Problemas )
2.4 EFECTO TÉRMICO.
Cuando un material se calienta, éste se dilata, y si se enfría, se contraerá.
La deformación unitaria debida a la variación de temperatura en materiales
homogéneos e isotrópicos, está limitada por el Coeficiente de expansión
térmica ‘α’ , el cual es constante en un rango amplio de temperaturas.
Luego,
𝜀𝑇 = 𝐿 𝛼 ∆𝑇
Las unidades dimensionales de α deben ser consistentes con las de ΔT.
[ 1 / °C ] ; [ 1 / °F ] ; [ 1 / K ] .
Si un elemento está impedido de deformarse libremente, al experimentar
una variación de temperatura, se inducirán “ esfuerzos térmicos “ en el
cuerpo. Estos esfuerzos se determinan suponiendo que el cuerpo puede
deformarse libremente, ya sea en dilatación o en contracción, y luego aplicar
fuerzas que produzcan la configuración real de deformación.
34
Debe cumplirse que:
𝛿𝑇 = 𝛿𝑃
𝐿 𝛼 ∆𝑇 =
𝐿𝜎
→
𝐸
𝜎𝑇 = 𝛼 𝐸 ∆𝑇
Que es el esfuerzo inducido por la variación de temperatura.
( Problemas )
35
2.5 RECIPIENTES DE PAREDES DELGADAS SOMETIDOS A PRESIÓN
INTERNA.
Un recipiente de forma circular o esférica, se considera de paredes delgadas
cuando su espesor ‘t’ es pequeño en comparación con su radio interior ‘r’
dada por la relación:
𝑟
≥ 10
𝑡
→
𝐷
≥ 20
𝑡
Cuando se cumple esta condición, puede suponerse que la distribución de
esfuerzos en planos normales a la superficie de la pared, es uniforme en todo
el espesor. Es decir, se tiene un estado biaxial de esfuerzos.
Sea ‘p’ la presión interna manométrica que actúa en el recipiente.
36
2.5.1 RECIPIENTES CILÍNDRICOS.
La determinación de los esfuerzos axiales o longitudinales σl , y de los
esfuerzos transversales o circunferenciales σt , se obtienen por medio del
equilibrio en los planos transversales y longitudinales, respectivamente.
- diagrama de cuerpo libre según corte plano transversal
∑ 𝐹𝑧 = 0
𝜎𝑙 2 𝜋 𝑟 𝑡 = 𝑝 𝜋 𝑟 2
𝑝𝑟
𝜎𝑙 =
2𝑡
- diagrama de cuerpo libre según corte plano longitudinal
37
∑ 𝐹𝑦 = 0
2 𝜎𝑡 𝐿 𝑡 = 2 𝑝 𝑟 𝑙
𝜎𝑡 =
𝑝𝑟
𝑡
Comparando ambas expresiones, se observa que,
𝜎𝑡 = 2 𝜎𝑙
Es decir, que el esfuerzo en un plano longitudinal es el doble del esfuerzo en
un plano transversal.
2.5.2 RECIPIENTES ESFÉRICOS.
Debido a la simetría de la esfera, basta con analizar un diagrama de cuerpo
libre según corte en un plano diametral:
∑ 𝐹𝑧 = 0
𝜎𝑙 2 𝜋 𝑟 𝑡 = 𝑝 𝜋 𝑟 2
𝜎𝑙 =
𝑝𝑟
2𝑡
Este esfuerzo es el mismo para cualquier orientación del diagrama de cuerpo
libre.
( Problemas )
38
3
CARGAS TORSIONALES
3.1 ESFUERZO CORTANTE POR TORSIÓN. TRANSMISIÓN DE POTENCIA.
Considere un eje circular destinado a transmitir un momento de rotación o
torque entre dos planos paralelos. Cualquier sección transversal normal al eje
longitudinal estará sometida a un momento torsor resistente Tr de igual
magnitud y sentido contrario al torque externo aplicado.
Este torque resistente es el resultante de los momentos que realizan las
diferentes fuerzas de corte que actúan en el plano transversal del eje.
𝑇𝑟 = 𝑇 = ∫ 𝜌 𝜏 𝑑𝐴
𝐴
Para evaluar esta integral, debe conocerse la variación del esfuerzo cortante
en el plano transversal.
Si se restringe el problema a secciones circulares, macizas o huecas, se puede
suponer que toda sección plana antes de la torsión, permanece plana
después de la torsión y que todo diámetro sigue siendo una línea recta.
Si todos los elementos longitudinales tienen la misma longitud, es decir, ejes
rectos de diámetro constante, se cumplen las siguientes relaciones:
39
𝐵𝐵 ′ 𝑐 ∙ 𝜃
tan(𝛾𝑐 ) =
=
𝐿
𝐿
tan(𝛾 ) =
𝐷𝐷′ 𝜌 ∙ 𝜃
=
𝐿
𝐿
Donde θ se llama “ángulo de torsión”.
Dado que las deformaciones son pequeñas, pueden considerarse las
siguientes aproximaciones:
𝛾𝑐 =
𝑐∙𝜃
𝐿
𝛾=
𝜌∙𝜃
𝐿
→
𝛾𝑐 𝛾
=
𝑐
𝜌
Es decir, las deformaciones unitarias por esfuerzo cortante son
proporcionales a su distancia al centro geométrico del eje.
Considerando ahora que es aplicable la Ley de Hooke, γ = τ / G , resulta:
𝜏𝑐
𝜏
=
𝑐∙𝐺 𝜌∙𝐺
Para materiales homogéneos e isotrópicos, se reduce a:
𝜏𝑐 𝜏
= = 𝑐𝑡𝑒
𝑐
𝜌
Es decir que los esfuerzos cortantes por torsión son proporcionales a su
distancia al centro geométrico del eje.
De lo anterior:
𝜏=
𝜌
∙𝜏
𝑐 𝑐
Entonces el momento torsor resistente será:
𝑇𝑟 = ∫
𝐴
𝜏𝑐 2
𝜏𝑐
𝜏
𝜌 𝑑𝐴 = ∫ 𝜌 2 𝑑𝐴 = ∫ 𝜌 2 𝑑𝐴
𝑐
𝑐 𝐴
𝜌 𝐴
Pero ∫𝐴 𝜌 2 𝑑𝐴 es el segundo momento polar del área, o momento polar
de inercia del área, con respecto al eje geométrico longitudinal del eje y se
designa por J.
40
Luego,
𝑇𝑟 =
𝜏∙𝐽
𝜌
→
𝜏=
𝜌 ∙ 𝑇𝑟
𝐽
Conocida como Fórmula de la Torsión, donde τ es el esfuerzo cortante en un
punto de una sección transversal, ubicado a una distancia ρ del centro
geométrico del eje, y donde Tr es el momento torsor resistente en dicha
sección transversal.
En consecuencia, el esfuerzo cortante es nulo en el centro geométrico del
eje, y es máximo en la periferia.
Para secciones circulares macizas se tiene que:
𝜋 ∙ 𝑑4
𝐽=
32
Y el esfuerzo cortante máximo se obtiene cuando
𝜌=𝑐=
𝑑
2
Lográndose:
𝜏=
16 ∙ 𝑇𝑟
𝜋 ∙ 𝑑3
donde d es el diámetro del eje.
Generalmente se emplean ejes de sección transversal circular para transmitir
potencia a una cierta velocidad de rotación.
Ya que potencia ( N ) se define como el trabajo realizado por unidad de
tiempo, y que el trabajo efectuado es igual al producto de la magnitud del
par o momento torsor constante , por el desplazamiento angular producido
(𝜑 ) , puede plantearse que :
𝑇𝑟𝑎𝑏𝑎𝑗𝑜 = 𝑇 ∙ 𝜑
𝑃𝑜𝑡𝑒𝑛𝑐𝑖𝑎 = 𝑁 =
𝑑 (𝑇 ∙ 𝜑) 𝑇 ∙ 𝑑𝜑
=
𝑑𝑡
𝑑𝑡
41
Pero,
𝑑𝜑
=𝜔
𝑑𝑡
ω: velocidad angular [rad/s]
Luego,
𝑁 = 𝑇∙𝜔
Es común que la velocidad de rotación del eje se exprese en [rpm] y la
potencia en [HP] o [CV]; entonces, efectuando las conversiones de unidades
compatibles necesarias, se tendrá:
𝜔 [
𝑟𝑎𝑑
2𝜋 𝑟𝑎𝑑 1 𝑚𝑖𝑛
2𝜋 ∙ 𝑛
] = 𝑛 [𝑟𝑝𝑚] ∙
[
]∙ [
]=
𝑠
1 𝑟𝑒𝑣 60 𝑠
60
a) en Sistema Métrico
𝑁 [𝐶𝑉 ] = 𝑇 [𝑘𝑝 ∙ 𝑐𝑚] ∙
2𝜋 ∙ 𝑛 𝑟𝑎𝑑
1
𝐶𝑉
[
]∙
[
]
60
𝑠
7500 𝑘𝑝 ∙ 𝑐𝑚 ⁄𝑠
𝑇 [𝑘𝑝 ∙ 𝑐𝑚] = 71620 ∙
→
𝑁 [𝐶𝑉 ]
𝑛 [𝑟𝑝𝑚]
b) en Sistema Inglés
𝑁 [𝐻𝑃] = 𝑇 [𝑙𝑏 ∙ 𝑖𝑛] ∙
2𝜋 ∙ 𝑛 𝑟𝑎𝑑
1
𝐻𝑃
[
]∙
[
]
60
𝑠
6600 𝑙𝑏 ∙ 𝑖𝑛⁄𝑠
𝑇 [𝑙𝑏 ∙ 𝑖𝑛] = 63000 ∙
𝑁 [𝐻𝑃]
𝑛 [𝑟𝑝𝑚]
→
42
3.2 DEFORMACIONES POR TORSIÓN.
Se vio que se cumplen las siguientes relaciones:
𝛾=
𝜌∙𝜃
𝐿
Deformación angular unitaria
𝜏=
𝑇∙𝜌
𝐽
Esfuerzo cortante
𝐺=
𝜏
𝛾
Módulo de rigidez
Sustituyendo, se logra:
𝜃=
𝑇∙𝐿
𝐺∙𝐽
Ángulo de torsión
Esta ecuación es aplicable para ejes homogéneos ( G constante ), de sección
transversal constante ( J constante y fibras longitudinales de igual longitud )
sometidos en sus extremos a un momento torsor T .
Si las características del eje son diferentes a las planteadas, debe dividirse en
tramos componentes que cumplan individualmente con las condiciones
requeridas para aplicar la fórmula.
( Problemas )
43
3.3 ESFUERZOS EN PLANOS OBLICUOS.
Para evaluar los esfuerzos en planos transversales oblicuos, se puede aplicar
círculo de Mohr.
De lo cual se deduce que:
a) Los esfuerzos cortantes son máximos en los planos transversales y
longitudinales diametrales, y corresponden a los dados por la fórmula
de la torsión.
b) Los esfuerzos principales son de igual magnitud y ocurren en planos
cuya normal está a 45° con el eje geométrico longitudinal del eje.
c) El esfuerzo normal máximo es de tracción y el esfuerzo normal mínimo
es de compresión, y ambos son de igual magnitud que el esfuerzo
cortante máximo.
3.4 MIEMBROS ESTÁTICAMENTE INDETERMINADOS.
Se resuelven aplicando los mismos criterios dados para el caso de fuerzas
axiales, considerando ahora las distorsiones en que intervienen los ángulos
de torsión.
( Problemas )
44
4
CARGAS FLEXIONANTES
4.1 VIGAS.
Las vigas son elementos prismáticos largos y rectos, cuya función principal es
resistir cargas transversales aplicadas en varios puntos, y que generalmente
actúan en forma perpendicular a su eje longitudinal.
Las cargas transversales sobre una viga suelen ser cargas concentradas,
cargas distribuidas, pares o momentos, actuando individualmente o en
combinación unas con otras.
Las vigas se clasifican de acuerdo con la manera en que están apoyadas.
Las disposiciones más frecuentes son las que muestran:
45
A nivel nacional, para ser empleados en vigas, se dispone de una gran
variedad de perfiles de acero, generalmente de 6 [m] de longitud, cuyas
propiedades se encuentran en el Manual de Diseño Estructural CINTAC:
Perfil
Soldado
Laminado
Limite fluencia [kp/cm2]
Serie
Significado
IN
Doble te Serie Normal de Vigas
2700
IB
Doble te Serie Hibrida de Vigas
Alas 3400 y Alma 2700
HN
Doble te Serie Normal de Columnas
W
Doble te Serie W Norteamericana
IPE
Doble te Serie IPE Alemana
IC
Doble te Formada por Dos Canales
Formato en Frío
2700
2530
Espalda Espalda
ICA
Doble te Formada por Dos Canales
Espalda Espalda, Alas Atiesadas
C
Canal
CA
Canal de Alas Atiesadas
L
Angulo de Alas Iguales
TL
Te formada por Dos Ángulos Espalda
Espalda, de Alas iguales
Cajón Cuadrado o Rectangular
C
Cajón Formado por Dos Canales de
Frente
CA
Cajón Formado por Dos Canales de
Frente, de Alas Atiesadas
L
Cajón Formado por Dos Ángulos de
Frente, de Alas iguales
2400
46
4.2 ESFUERZOS DEBIDO A LA FLEXIÓN.
Considérese una viga cargada y deformada como se muestra:
Analizando la deflexión experimentada por la viga, se puede deducir que los
elementos longitudinales cercanos a la parte inferior se han estirado,
mientras que los cercanos a la parte superior se han acortado. Esto significa
que existen esfuerzos normales de tracción y de compresión en las diferentes
secciones transversales de la viga.
Un diagrama de cuerpo libre de una sección entre el apoyo de la izquierda y
la carga aplicada, muestra que para establecer equilibrio, debe existir una
fuerza vertical V y un momento M en la sección transversal resistente.
El momento resistente M es el que origina los esfuerzos normales en la
sección y se conoce como Momento Flector, mientras que la fuerza interna V
, que actúa en forma paralela a la sección, origina esfuerzos de corte y se
conoce como Fuerza Cortante.
La fuerza cortante y el momento flector en cualquier sección transversal de
una viga, se consideran positivos cuando tienen las direcciones y sentidos
que se indican:
47
Para evaluar los esfuerzos de corte y los esfuerzos normales en una
determinada sección transversal de una viga, es necesario conocer la fuerza
cortante y el momento flector que actúan en dicha sección.
4.3 DIAGRAMAS DE FUERZA CORTANTE Y MOMENTO FLECTOR.
Con el objeto de poder analizar como varían las fuerzas cortantes y los
momentos flectores a lo largo de la viga, es conveniente trazar los diagramas
correspondientes, lo que además permitirá saber dónde se ubican las
secciones críticas. En efecto, en aquella sección en que la fuerza cortante sea
máxima actuará en consecuencia el máximo esfuerzo de corte, y en aquella
sección en que el momento flector sea máximo actuará el máximo esfuerzo
normal.
El trazado de los diagramas se logra analizando los diagramas de cuerpo libre
de secciones donde se produzcan cambios de carga a lo largo de la viga,
manteniendo siempre el mismo origen de referencia.
Después de haber determinado las reacciones en los apoyos, por medio de
un diagrama de cuerpo libre de toda la viga, es conveniente dibujar la viga
original e inmediatamente debajo y correspondientemente los diagramas de
fuerza cortante y momento flector.
( Problemas )
48
4.4 RELACIÓN ENTRE CARGA, FUERZA CORTANTE Y MOMENTO FLECTOR.
Para obtener estas relaciones, considérese la viga simplemente apoyada que
se muestra, bajo la acción de una carga distribuida:
∑ 𝐹𝑦 = 0
𝑉 = (𝑉 + ∆𝑉) + 𝜔∆𝑥
→
∆𝑉 = −𝜔 ∆𝑥
Dividiendo ambos miembros por Δx y haciendo que Δx tienda a cero,
𝑑𝑉
= −𝜔
𝑑𝑥
Esta ecuación indica que en cualquier sección transversal de una viga, la
pendiente del diagrama de fuerza cortante es igual al negativo de la
magnitud de la carga.
∑ 𝑀𝐶 ′ = 0
𝑀 = (𝑀 + ∆𝑀 ) + 𝜔∆𝑥
∆𝑥
− 𝑉 ∆𝑥
2
→
∆𝑀 = 𝑉 ∆𝑥 −
1
𝜔 (∆𝑥)2
2
Dividiendo ambos miembros por Δx y haciendo que Δx tienda a cero ,
𝑑𝑀
=𝑉
𝑑𝑥
Esta ecuación indica que en cualquier sección transversal de una viga, la
pendiente del diagrama de momento flector es igual a la magnitud de la
fuerza cortante.
49
4.5 FÓRMULA DE LA FLEXIÓN.
La fórmula de la flexión define el esfuerzo normal en un punto de una sección
transversal, en función del momento flector en la sección y de la forma de la
sección.
Para su deducción se hacen varias suposiciones que son válidas si no se
sobrepasa la zona elástica del material de la viga:
a) el esfuerzo es proporcional a la deformación ( Ley de Hooke )
b) el material de la viga es homogéneo y tiene el mismo módulo de
elasticidad en tracción que en compresión
c) toda sección plana antes de la flexión permanece plana después de ella
d) todas las fibras longitudinales tienen el mismo largo.
Considérese un tramo deformado de una viga solicitada a flexión:
Se observa que a una cierta distancia ‘c’ sobre la parte inferior de la viga, los
elementos longitudinales permanecen sin variar de longitud. La superficie
formada por estos elementos se llama “superficie neutra”, y la intersección
de esta superficie con cualquier plano que origine una sección recta
transversal se llama “eje neutro”.
En consecuencia, para vigas rectas solicitadas a flexión en un plano, el eje
neutro es perpendicular a dicho plano, y puede demostrarse que siempre
pasa por el centroide de la sección transversal.
50
Puede entonces plantearse que:
𝛿𝑦 𝛿𝑐
=
𝑦
𝑐
→
𝛿𝑦 =
𝑦
𝛿
𝑐 𝑐
( nótese que ambas deformaciones son en la dirección ‘x’ )
ya que 𝜀 = 𝛿 ⁄∆𝑥 resulta :
𝑦
𝜀𝑦 =
𝑐
𝜀𝑐
Esto significa que la deformación unitaria de cualquier fibra longitudinal de la
viga, es proporcional a la distancia de la superficie neutra a la fibra.
Dado que es aplicable Hooke, resulta:
Es decir,
𝜎𝑦
𝑦
=
𝜎𝑐
𝑐
𝜎𝑦
𝐸
𝑦 𝜎𝑐
=𝑐∙
𝐸
= 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒
Esto implica una distribución de esfuerzos normales como la que se indica:
𝑑𝐹 = 𝜎𝑦 ∙ 𝑑𝐴
𝑑𝑀 = 𝑦 ∙ 𝑑𝐹 = 𝑦 ∙ 𝜎𝑦 ∙ 𝑑𝐴
𝑀 = ∫ 𝑦 ∙ 𝜎𝑦 ∙ 𝑑𝐴 = ∫ 𝑦2 ∙
𝐴
𝐴
𝑀=
𝜎𝑦
∙ 𝑑𝐴
𝑦
𝜎𝑦
∫ 𝑦2 ∙ 𝑑𝐴
𝑦 𝐴
Pero ∫𝐴 𝑦2 ∙ 𝑑𝐴 es el segundo momento del área de la sección transversal,
o momento ecuatorial de inercia con respecto al eje neutro, y se designa por
I.
Entonces, en forma genérica, puede establecerse que:
𝜎=
𝑀∙𝑦
𝐼
Donde σ es el esfuerzo normal a una distancia ‘y’ de la superficie neutra, y
M es el momento flector resistente en la sección donde se evalúa el
esfuerzo.
51
Este esfuerzo será máximo en la fibra más alejada del eje neutro, es decir, en
la parte superior o en la parte inferior de la viga. Entonces,
𝜎𝑚á𝑥 =
En la que
𝐼
𝑊=𝑐
𝑀∙𝑐 𝑀
=
𝐼
𝑊
se denomina Módulo Resistente de la sección.
Entre otras propiedades, los valores del Momento de Inercia y del Módulo
Resistente, con respecto a los ejes ‘x’ e ‘y’, se encuentran tabulados para los
diferentes perfiles que se fabrican.
4.6 FÓRMULA DEL ESFUERZO CORTANTE.
Considérese un tramo de una viga de sección transversal constante sometido
a fuerzas cortantes y momentos flectores como se indica:
Si se considera una porción de este tramo como se muestra, puede deducirse
que:
𝑑𝐹2 = 𝜎2 𝑑𝐴 =
𝑀2 ∙ 𝑦 ∙ 𝑑𝐴
𝐼
𝑀2 𝑐
∫ 𝑦 ∙ 𝑑𝐴
𝐹2 =
𝐼 ℎ
Analogamente,
𝑀1 𝑐
∫ 𝑦 ∙ 𝑑𝐴
𝐹1 =
𝐼 ℎ
52
El equilibrio en la dirección horizontal requiere que:
𝑉𝐻 + 𝐹1 = 𝐹2
→
𝑉𝐻 = 𝐹2 − 𝐹1
Con lo cual
𝑀2 − 𝑀1 𝑐
∫ 𝑦 ∙ 𝑑𝐴
𝑉𝐻 =
𝐼
ℎ
Pero
𝑉𝐻 = 𝜏 ∙ 𝑡 ∙ ∆𝑥
𝑦
𝑀2 − 𝑀1 = ∆𝑀
Luego,
𝑐
∆𝑀
∫ 𝑦 ∙ 𝑑𝐴
𝜏=
𝑡 ∙ 𝐼 ∙ ∆𝑥 ℎ
Haciendo que Δx tienda a cero, resulta :
𝑐
𝑑𝑀
∫ 𝑦 ∙ 𝑑𝐴
𝜏=
𝑡 ∙ 𝐼 ∙ 𝑑𝑥 ℎ
Pero se demostró que
𝑑𝑀
𝑑𝑥
= 𝑉 entonces:
𝑉 𝑐
∫ 𝑦 ∙ 𝑑𝐴
𝜏=
𝑡∙𝐼 ℎ
Esta integral es el primer momento del área con respecto al eje neutro, entre
la cima ( o fondo ) de la sección y el punto donde el esfuerzo cortante está
siendo determinado, lo que se conoce como Momento Estático del área, y se
designa por Q.
Entonces, finalmente:
𝜏=
𝑉∙𝑄
𝑡∙𝐼
Nótese que ‘t’ corresponde al espesor de la viga en el punto donde el
esfuerzo se está determinando.
A medida que el espesor aumenta, la ecuación pierde exactitud.
53
En efecto, para vigas de sección rectangular ocurre que si :
• El espesor es igual a la mitad del peralte o altura, el error es de un 3%
• El espesor es igual al peralte o altura, el error es de un 12%
• El espesor es igual a cuatro veces el peralte o altura, el error es de un
100%
Si bien la deducción se basó en una fuerza cortante horizontal, esta ecuación
también proporciona el esfuerzo cortante vertical en un punto de la viga, ya
que los esfuerzos cortantes en planos ortogonales que pasan por un mismo
punto, tienen la misma magnitud.
Por otra parte, ya que en su deducción se empleó la fórmula de la flexión,
esta ecuación está sujeta a las mismas hipótesis y limitaciones.
La distribución de esfuerzos cortantes sobre la sección transversal de la viga,
es de forma parabólica, presentando valores nulos en los extremos libres y su
valor máximo en el eje neutro.
( Problemas )
4.7 DEFLEXIONES DEBIDO A CARGAS FLEXIONANTES.
Al proyectar una viga, no solo es necesario conocer los esfuerzos producidos,
sino también las deformaciones originadas por las cargas actuantes.
Cuando se carga una viga, dentro de la zona elástica, su eje longitudinal
centroidal toma la forma de una curva, la que se conoce como Elástica de la
viga.
Si se considera una viga sometida a un momento flector constante, la elástica
es un arco de círculo de radio R, como se indica:
54
Del elemento deformado:
𝜃=
𝐿 𝐿+𝛿
=
𝑅 𝑅+𝑐
𝐿(𝑅 + 𝑐) = 𝑅 (𝐿 + 𝛿 )
→
𝑐∙𝐿 =𝛿∙𝑅
𝑐 𝛿
𝜎 𝑀∙𝑐
= =𝜀= =
𝑅 𝐿
𝐸 𝐸∙𝐼
1
𝑅
𝑀
= 𝐸∙𝐼
Radio de curvatura
Como en general el momento flector es función de la posición de la sección
que se analiza, puede escribirse de Cálculo que:
1
𝑑 2 𝑦⁄𝑑𝑥 2
=
𝑅 √[1 + (𝑑𝑦⁄𝑑𝑥)2 ]3
Dado que en la práctica, para vigas resulta (dy/dx) muy pequeño, su
cuadrado puede despreciarse en comparación con la unidad (1), luego ,
1 𝑑2𝑦
=
𝑅 𝑑𝑥 2
→
𝑑2𝑦
𝑀 =𝐸∙𝐼∙ 2
𝑑𝑥
Que es la ecuación diferencial de la elástica, considerando un sistema de
coordenadas con ‘x’ positivo hacia la derecha e ‘y’ positivo hacia arriba , para
que exista concordancia de signo entre el momento flector y la segunda
derivada de la deflexión.
55
Nota.- Además de las limitaciones de la fórmula de la flexión, esta ecuación
supone que :
a) el cuadrado de la pendiente de la viga es despreciable en comparación
con la unidad.
b) la deflexión debido a los esfuerzos cortantes es despreciable.
c) los valores de E I son constantes para toda la viga.
Se cumplen entonces, las siguientes relaciones:
𝑦
Deflexión ( flecha )
:
Pendiente
: 𝜃 = 𝑑𝑥
Momento
: 𝑀 = 𝐸 ∙ 𝐼 ∙ 𝑑𝑥 2
Fuerza cortante
: 𝑉=
Carga
: 𝜔 = − 𝑑𝑥 = −𝐸 ∙ 𝐼 ∙ 𝑑𝑥 4
𝑑𝑦
𝑑2𝑦
𝑑𝑀
𝑑𝑥
𝑑3𝑦
= 𝐸 ∙ 𝐼 ∙ 𝑑𝑥 3
𝑑𝑉
𝑑4𝑦
Existen diferentes métodos para el cálculo de las deflexiones que se
producen en vigas : método de doble integración, método de funciones de
singularidad, método de momentos de área, método de superposición,
método de energía.
4.8 MÉTODO DE DOBLE INTEGRACIÓN.
Para las diferentes secciones de la viga, se expresa el momento flector en
función de la variable ‘x’ y se hace igual a
𝑑2𝑦
𝐸 ∙ 𝐼 ∙ 𝑑𝑥 2 dando origen a una
ecuación diferencial, la que puede integrarse dos veces.
Las constantes de integración resultantes, se evalúan por medio de
condiciones de límite o por condiciones de acoplamiento.
56
Una condición de límite es un conjunto de valores conocidos de ‘x’ e ‘y’ ,
o de ‘x’ y ‘dy/dx’ en un punto determinado de la viga.
Una condición de acoplamiento establece que tanto la deflexión como la
pendiente de la viga, determinadas entre intervalos diferentes, son iguales
en la sección de unión de los dos intervalos.
( Problemas )
4.9 MÉTODO DE FUNCIONES DE SINGULARIDAD.
El uso de ciertas funciones de singularidad, permite representar la fuerza
cortante y el momento flector por expresiones matemáticas únicas, lo que
trae consigo una simplificación de los cálculos para la determinación de las
deflexiones y pendientes en la viga.
Una función de singularidad de la variable ‘x’ se escribe como:
⟨𝑥 − 𝑎⟩𝑛
para 𝑛 ≥ 0
Lo que equivale a:
𝑛
⟨𝑥 − 𝑎⟩𝑛 = {(𝑥 − 𝑎)
0
𝑠𝑖
𝑠𝑖
𝑥≥𝑎
𝑥<𝑎
Es decir, que cuando la cantidad entre corchetes sea positiva, toma el valor
correspondiente a la evaluación del binomio exponencial, y cuando la
cantidad entre corchetes sea negativa, toma el valor cero.
Las funciones de singularidad se pueden derivar e integrar.
Se presentan a continuación, las funciones de singularidad correspondientes
a las cargas básicas comúnmente encontradas en vigas:
57
Debe notarse que para cargas distribuidas que no se extienden hasta el
extremo derecho de la viga, o que sean discontinuas, deberán reemplazarse
por una combinación equivalente que permita el uso de las funciones
especificadas, como se muestra en el siguiente caso:
58
4.10 MÉTODO DE MOMENTOS DE ÁREA.
Es un método que permite determinar deflexiones en un punto cualquiera de
una viga, mediante un proceso semi-gráfico a partir del diagrama de
momentos. Se basa en la aplicación de dos teoremas, cuya formulación se
plantea:
Considérese una viga con un diagrama de momentos y curva elástica como se
muestra:
𝑅 𝑑𝜃 = 𝑑𝐿
→
𝑑𝜃 =
𝑑𝜃 =
𝑀
𝑑𝐿
𝐸∙𝐼
1
𝑑𝐿
𝑅
→
Dado que la curvatura es pequeña, puede considerarse que: 𝑑𝐿 = 𝑑𝑥
𝑑𝜃 =
𝑀
𝑑𝑥
𝐸∙𝐼
59
Considerando dos puntos cualquiera A y B e integrando dθ entre estos
límites :
𝜃𝐵
𝑥𝐵
∫ 𝑑𝜃 = ∫
𝜃𝐴
𝑥𝐴
𝑀
𝑑𝑥
𝐸∙𝐼
𝑥𝐵
𝜃𝐴𝐵 = 𝜃𝐵 − 𝜃𝐴 = ∫
𝑥𝐴
𝑀
𝑑𝑥
𝐸∙𝐼
Teorema 1.- El ángulo que forman las tangentes en dos puntos cualquiera de
la elástica, es igual a ( 1 / EI ) veces el área del diagrama de momentos entre
estos dos puntos.
Las áreas bajo momentos flectores positivos se consideran positivas,
mientras que las áreas bajo momentos flectores negativos se consideran
negativas.
Un área positiva implica un ángulo positivo, es decir, de sentido anti-horario
cuando se mide desde la tangente en el punto de la izquierda a la otra
tangente en el punto de la derecha.
Dado que las deflexiones en una viga generalmente son pequeñas, se cumple
aproximadamente que:
𝑑𝑡 = 𝑥 ∙ 𝑑𝜃
𝑑𝑡 = 𝑥 ∙
→
𝑀
𝑑𝑥
𝐸∙𝐼
60
Integrando resulta:
𝑡𝐴⁄𝐵
∫
0
𝑥𝐵
𝑑𝑡 = 𝑡𝐴⁄𝐵 = ∫
𝑥𝐴
𝑥 ∙
𝑀
𝑑𝑥
𝐸∙𝐼
Desviación tangencial
Teorema 2.- La desviación tangencial, bajada desde una tangente que pasa
por B hacia un punto A de la elástica, es igual a ( 1 / EI ) veces el momento
del área bajo el diagrama de momentos entre estos puntos, con respecto a
un eje que pasa por A .
El momento de áreas positivas es positivo y da por resultado una desviación
tangencial positiva.
Una desviación tangencial positiva, significa que el punto centro de momento
está por encima de la tangente trazada en el otro punto de la elástica.
El método de los momentos de áreas resulta eficaz en la medida que sea fácil
el cálculo de áreas y momentos de dichas áreas. Por este motivo, resulta de
mucha utilidad trazar los diagramas de momentos por partes, dibujando
independientemente los diagramas de momento que produce cada una de
las cargas en relación a una sección de referencia elegida arbitrariamente.
Para secciones de referencia elegidas en un extremo de la viga, el momento
total resultante en cualquier sección es la suma algebraica de los momentos
componentes, mientras que para secciones de referencia interiores, el
momento total resultante en cualquier sección es la suma algebraica de los
momentos a cada lado de la sección de referencia.
61
En definitiva, las deflexiones en vigas por este método, se determinan
aplicando una o varias veces el Teorema 2 , para encontrar las deflexiones
deseadas por medio de relaciones con las desviaciones tangenciales trazadas
sobre la elástica de la viga, considerando para ello, el diagrama de momentos
por partes o el diagrama de momentos total, según convenga.
( Problemas )
Para algunas vigas, la ubicación del punto de máxima deflexión y su valor,
puede determinarse mediante la aplicación del primer y segundo teorema.
( Problemas )
4.11 MÉTODO DE SUPERPOSICIÓN.
Consiste en determinar el efecto resultante de varias cargas, como la suma
de los efectos de cada una de las cargas actuando individualmente.
Tiene su ventaja en el hecho que se disponga de resultados establecidos para
las descomposiciones. El Manual de Diseño Estructural CINTAC presenta las
fórmulas y diagramas correspondientes a 39 casos de vigas, tanto
estáticamente determinadas como indeterminadas, con diferentes
condiciones de apoyo y diferentes solicitaciones de carga.
El método es aplicable solo para trabajo en el rango elástico de vigas con
sección transversal constante.
( Problemas )
62
4.12 VIGAS ESTÁTICAMENTE INDETERMINADAS.
Son aquellas en que las ecuaciones de equilibrio no son suficientes para
determinar todas las incógnitas involucradas (generalmente son reacciones
de apoyo o fuerzas desconocidas). Las ecuaciones adicionales se obtienen de
relaciones geométricas de la deformación de la viga.
La solución de estas vigas puede obtenerse aplicando cualquiera de los
métodos descritos anteriormente.
( Problemas )
63
64
5
CARGAS COMBINADAS
Comúnmente, los miembros estructurales están solicitados a varios tipos de
cargas que actúan simultáneamente.
Esto implica que en un mismo punto de una sección transversal del miembro,
existirán esfuerzos combinados: Esfuerzos normales ( debido a cargas axiales
y/o momentos flectores ), y/o Esfuerzos cortantes ( debido a fuerzas
cortantes y/o momentos torsores ) .
El análisis de tales miembros, puede realizarse aplicando el Principio de
Superposición, si es que los esfuerzos máximos no exceden del límite elástico
del material.
Supóngase que se desea calcular los esfuerzos en el punto K del miembro
curvado que se muestra. Para ello, es necesario realizar un corte en la
sección en que se encuentra el punto, y analizar el diagrama de cuerpo libre
que se indica.
Se determinan los esfuerzos que producen cada una de las fuerzas internas
equilibrantes de la sección, y se superponen para generar el estado de
esfuerzos en el punto de referencia. Los esfuerzos máximos y planos
correspondientes en que actúan, se pueden obtener aplicando las ecuaciones
analíticas o círculo de Mohr.
( Problemas )
65
66
6
PANDEO
Si una columna es larga en relación a las dimensiones de su sección
transversal, se dice que es esbelta y puede fallar por Pandeo, esto es, por
flexión y desviación lateral en vez de fallar por compresión directa.
El pandeo puede ser elástico o inelástico, dependiendo de la esbeltez de la
columna.
El pandeo es una falla de estabilidad, en la cual la deflexión lateral producida
no está en proporción directa con la carga aplicada.
6.1 COLUMNAS CON CARGAS AXIALES EXCÉNTRICAS.
Considerar una columna cargada y deformada como se indica:
El momento flector en una sección cualquiera es:
𝑀 = 𝑃[𝑒 + (𝛿 − 𝑦)]
Considerando comportamiento elástico y que las deflexiones son pequeñas,
𝑀 = 𝑃 ∙ [𝑒 + 𝛿 − 𝑦] = 𝐸 ∙ 𝐼 ∙ 𝑦´´
𝑦´´ = 𝑘 2 [𝑒 + 𝛿 − 𝑦]
Luego,
𝑐𝑜𝑛 𝑘 2 = 𝑃⁄𝐸𝐼
𝑦´´ + 𝑘 2 𝑦 = 𝑘 2 [𝑒 + 𝛿 ]
67
Ecuación diferencial de segundo orden con coeficientes constantes, cuya
solución general es de la forma:
Entonces,
𝑦´ = 𝐴 ∙ 𝑘 ∙ 𝑐𝑜𝑠𝑘𝑥 − 𝐵 ∙ 𝑘 ∙ 𝑠𝑒𝑛𝑘𝑥
𝑦´´ = −𝐴 ∙ 𝑘 2 𝑠𝑒𝑛𝑘𝑥 − 𝐵 ∙ 𝑘 2 𝑐𝑜𝑠𝑘𝑥 = −𝑘 2 (𝐴 ∙ 𝑠𝑒𝑛𝑘𝑥 + 𝐵 ∙ 𝑐𝑜𝑠𝑘𝑥)
𝑦´´ = −𝑘 2 (𝑦 − 𝐶 )
Sustituyendo,
Implica que,
−𝑘 2 (𝑦 − 𝐶 ) + 𝑘 2 𝑦 = 𝑘 2 (𝑒 + 𝛿)
𝐶 =𝑒+𝛿
Además, para 𝑥 = 0 se tiene que y= 0 junto con
Luego,
𝑑𝑦
𝑑𝑥
=0
0=B+C
entonces B = - C = - ( 𝑒 + 𝛿 )
0 = A∙k
entonces A = 0
Entonces, la solución general es:
𝑦 = −(𝑒 + 𝛿 )𝑐𝑜𝑠𝑘𝑥 + (𝑒 + 𝛿 )
𝑦 = (𝑒 + 𝛿 ) ∙ (1 − 𝑐𝑜𝑠𝑘𝑥)
Para 𝑥 = 𝐿⁄2 ocurre la flecha máxima, 𝑦𝑚𝑎𝑥 = 𝛿
Luego,
𝑘𝐿
𝑘𝐿
2
2
𝛿 = −𝑒 ∙ 𝑐𝑜𝑠 ( ) − 𝛿 ∙ cos ( ) + 𝑒 + 𝛿
𝑘𝐿
𝑘𝐿
𝛿 ∙ cos ( ) = 𝑒 [1 − cos ( )] →
2
2
𝑘𝐿
𝛿 = 𝑒 ∙ [sec ( ) − 1] →
2
𝐿 𝑃
𝛿 = 𝑒 ∙ [sec ( √ ) − 1]
2 𝐸𝐼
Resulta evidente que la flecha 𝛿 aumenta a medida que aumenta la carga P,
aunque la relación no es lineal.
68
La flecha aumenta sin límite a
medida que la carga P tiende a un
cierto valor crítico.
El valor de esta carga crítica Pcr se
determina haciendo:
𝑘𝐿
sec ( ) → ∞
2
Lo que implica que:
𝑘𝐿 𝑛𝜋
=
2
2
𝑛 = 1,3,5 …
Considerando el valor menor, resulta: kL = 𝜋
√
𝑃
𝜋
=
𝐸∙𝐼 𝐿
𝜋 2 𝐸𝐼
𝑃 = 𝑃𝑐𝑟 = 2
𝐿
Este mismo resultado se obtiene cuando e = 0, ya que la flecha será nula para
todo valor de (𝑘𝑙⁄2) < 𝜋⁄2, es decir que la flecha permanece nula para todo
valor de
P < Pcr.
Pero cuando P=Pcr se cumple que (𝑘𝑙⁄2) < 𝜋⁄2 y la flecha resulta indefinida,
pudiendo tomar cualquier valor arbitrario.
El momento flector máximo ocurre en el punto medio de la longitud de la
columna, y está dado por:
𝑀𝑚á𝑥 = 𝑃(𝑒 + 𝛿 )
Pero,
Luego,
𝑘𝐿
(𝑒 + 𝛿 ) = 𝑒 ∙ sec ( )
2
𝑘𝐿
𝑀𝑚á𝑥 = 𝑃 ∙ 𝑒 ∙ sec ( )
2
69
Aplicando superposición puede determinarse el esfuerzo máximo de
compresión:
𝜎𝑚𝑎𝑥
𝑘𝐿
𝑃 𝑀𝑚á𝑥 ∙ 𝑐 𝑃 𝑃 ∙ 𝑒 ∙ 𝑠𝑒𝑐( 2 ) ∙ 𝑐
= +
= +
𝐴
𝐼
𝐴
𝐼
Pero
𝐼 = 𝐴𝑟 2
Donde
r: radio de giro de la sección
𝜎𝑚á𝑥 =
𝑃
=
𝐴
𝑃
𝑒∙𝑐
𝑘𝐿
∙ [1 + ( 2 ) sec ( )]
𝐴
𝑟
2
𝜎𝑚á𝑥
1+(
𝑒∙𝑐
𝐿
𝑃
) sec ( ) √
2
2𝑟 𝐸 ∙ 𝐴
𝑟
Ecuación conocida como la “fórmula de la secante”.
L/r : relación de esbeltez
𝑒∙𝑐
∶ relación de excentricidad
𝑟2
Si se establece como límite para el esfuerzo máximo, el valor del esfuerzo de
fluencia del material, entonces P corresponderá a la carga en que comienza
la acción inelástica, la cual debe dividirse por un factor de seguridad para
obtener la carga admisible sobre la columna.
Dado que P/A se encuentra presente en los dos lados de la ecuación, esta
debe resolverse por aproximaciones sucesivas o tanteos.
70
La carga crítica puede escribirse como:
𝑃𝑐𝑟 =
𝜋 2 𝐸𝐼 𝜋 2 𝐸𝐴𝑟 2
=
→
𝐿2
𝐿2
𝑃𝑐𝑟 𝜋 2 𝐸
=
= 𝜎𝑐𝑟
𝐿
𝐴
( 2)
𝑟
Ecuación conocida como "Fórmula de Euler". Esta carga crítica corresponde
al comportamiento de una columna ideal, la cual se supone perfectamente
recta y comprimida por una carga aplicada centralmente. Nótese que la
carga crítica es independiente de la resistencia a la compresión del material
y que depende directamente del momento de inercia de la sección.
El radio de giro se determina con respecto al eje alrededor del cual ocurre
la flexión, y para una columna articulada es siempre el mínimo radio de
giro.
La curva de Euler es válida
sólo en la región BC y su valor
límite
inferior
queda
determinado por el esfuerzo
de
proporcionalidad
del
material. Bajo el valor límite
de L/r, el esfuerzo de
compresión medio alcanzará
el límite de fluencia antes de
que ocurra pandeo. Sobre el
valor límite de L/r ocurre la
falla por pandeo y se puede
utilizar la fórmula de Euler
(𝜎𝑐𝑟 < 𝜎𝑓 ).
71
Cuando la relación de esbeltez es baja, la columna podrá comportarse como
un bloque a compresión, y la falla seria por un límite de resistencia del
material (DE). Existe en consecuencia un rango intermedio (EB), donde es
aplicable la fórmula de la secante.
6.2 EFECTO DE LAS CONDICIONES DE LOS EXTREMOS.
Tanto la fórmula de la secante como la de Euler han sido deducidas bajo la
hipótesis de que el momento flector en ambos extremos de la columna era
nulo. Para contemplar las otras posibilidades de apoyo, el largo L de estas
ecuaciones debe reemplazarse por un largo efectivo Le, de acuerdo a la tabla
que se indica:
Caso:
a) Ambos extremos empotrados.
b) Un extremo empotrado y el otro articulado.
c) Un extremo empotrado y el otro sin rotación, pero con
traslación.
d) Ambos extremos articulados.
e) Un extremo empotrado y el otro libre.
f) Un extremo articulado y el otro sin rotación, pero con traslación.
72
En la práctica, se consideran columnas con extremos simplemente apoyados
o articulados con más frecuencia que cualquier otra.
6.3 FÓRMULAS EMPÍRICAS PARA COLUMNAS
Debido a las diferencias entre columnas reales y columnas ideales, se han
desarrollado fórmulas empíricas que concuerdan razonablemente en el rango
intermedio con los resultados experimentales obtenidos. Algunas de ellas
son:
i)
Fórmula de Gordon-Rankine
𝑃𝑎𝑑𝑚
=
𝐴
Para A37-24
Para A52-34
𝐿𝑒
𝑟
𝐿𝑒
𝑟
𝜎𝑜
𝐿 2
1 + 𝐶1 ( 𝑒 )
𝑟
> 115
𝜎𝑜 = 3076 [
> 100
𝜎𝑜 = 4672
𝑘𝑝
𝑐𝑚2
] 𝑦 𝐶1 = 2,15 ∙ 10 −4
𝑦 𝐶1 = 3,31 ∙ 10 −4
Esta carga admisible considera un coeficiente de seguridad de 1,5
ii)
Fórmula de la Parábola
𝑃𝑎𝑑𝑚
𝐿𝑒 2
= 𝜎𝑜 − 𝐶2 ( )
𝐴
𝑟
Para A37-24
Para A52-34
𝐿𝑒
𝑟
𝐿𝑒
𝑟
≤ 115
𝜎𝑜 = 1400 [
≤ 100
𝜎𝑜 = 2000
𝑘𝑝
𝑐𝑚2
] 𝑦 𝐶2 = 454 ∙ 10 −4
𝑦 𝐶2 = 916 ∙ 10 −4
Esta carga admisible considera un coeficiente de seguridad de 1.5
73
6.4 FÓRMULA DE LA INTERACCIÓN
Se aplica cuando hay columnas sometidas a compresión axial y flexión en
forma simultánea. En este caso, se tiene:
𝑃 𝑀∙𝑐
+
≡ 𝜎𝑎𝑑𝑚 →
𝐴
𝐼
𝑃⁄𝐴 𝑀 ∙ 𝑐 ⁄𝐼
+
=1
𝜎𝑎𝑑𝑚
𝜎𝑎𝑑𝑚
En general, el valor de 𝜎𝑎𝑑𝑚 será diferente para los dos términos, ya que
se aplican a diferentes solicitaciones, luego:
𝑃⁄𝐴 𝑀 ∙ 𝑐 ⁄𝐼
+
≤1
𝜎𝑎
𝜎𝑏
𝜎𝑎 :
es la tensión de compresión axial admisible, calculada con el
mayor valor de (
𝜎𝑏 :
𝐿𝑒
𝑟
)
tensión de compresión por flexión admisible. Normalmente, es
0.6 veces el límite de fluencia.
Esta ecuación es válida cuando
𝑃 ⁄𝐴
𝜎𝑎
≤ 0,15
Los perfiles de las series IN e IB se utilizan preferentemente en soluciones
de vigas y, eventualmente, como columnas.
Los perfiles de la serie HN se utilizan de preferencia como columnas.
Las propiedades de dichos perfiles se encuentran en el manual de Diseño
Estructural CINTAC.