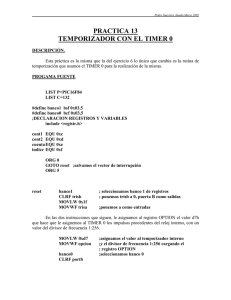
227141786-Microcontroladores-Pic-18f4550-Ejemplos-Practicos-convertido
Anuncio

Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos MICROCONTROLADORES PIC 18F4550: EJEMPLOS PRÁCTICOS EN LENGUAJE ENSAMBLADOR Introducción Se presenta a continuación unas notas que tienen por objetivo facilitar al lector en el uso de microcontroladores PIC 18F4550, mediante una serie de ejemplos prácticos que le permiten iniciarse en el uso de los mismos, y también aprender a escribir sus propios programas, tomando como base estos ejemplos, complementándolos a sus necesidades específicas añadiéndole su toque personal. La información teórica se tomó de las hojas de datos del fabricante, pero no se pretende ser un reemplazo de ellas, por lo que siempre se sugiere acudir a las mismas, de tal manera que se sugiere al lector consultar dicha literatura para abundar sobre el tema que considere que se trata aquí de una manera muy escueta. Se agradece la elaboración de las figuras a Cesar Hugo Pimentel Romero. 1 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Conceptos básicos Nuestra cómoda vida moderna lo es gracias a la gran cantidad de artículos y artefactos con los que interactuamos diariamente ¡sin ni siquiera darnos cuenta!, muchos de estos artefactos son electrónicos, y recientemente están basados en las computadoras digitales. En la historia de las computadoras, los primeros prototipos fueron mecánicos, debido al momento tecnológico histórico en el que aparecieron. Cuando aparecen los primeros componentes electrónicos, de manera natural se utilizaron para realizar los primeros prototipos de las computadoras electrónicas Microprocesador. Es un circuito integrado que tiene una alta capacidad de procesamiento de información, usado típicamente como el CPU de una computadora personal. Está compuesto básicamente por un camino de datos (la conexión de un ALU con sus registros) y una unidad de control. Los microprocesadores pueden clasificarse como CISC y RISC En la siguiente tabla se muestra el significado de estos acrónimos Procesadores CISC.C: Complex I: Instruction S: Set C: Computer Procesadores RISC. R: Reduced I: instruction S: Set C: Computer Tabla 1.1 Microprocesadores CISC y RISC Si una máquina RISC requiere 4 ó 5 instrucciones para hacer lo que una máquina CISC hace en una instrucción, pero si las instrucciones RISC son diez veces más rápidas, RISC gana. Otro concepto muy importante, es el de Sistema mínimo, el cual consiste en agregarle a un microprocesador, los elementos indispensables necesarios para que pueda ejecutar una tarea específica Computadora: Es un sistema digital de alta capacidad de procesamiento de información, recibe datos de entrada, genera resultados a alta velocidad y con gran exactitud, mediante la ejecución de programas. 2 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Ilustración 1 Bloques básicos que forman una computadora digital 3 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Arquitectura de von Neumann Arquitectura Von Neumann: El tamaño de la palabra de memoria y de la palabra de datos es el mismo (o equivalente), de tal manera que una parte del “Mapa” de memoria corresponde a programa y otra corresponde a datos. Ilustración 2 Arquitectura Von Neumann Arquitectura Harvard El tamaño de la palabra de memoria de programa y la palabra de memoria de datos es diferente. Los mapas de memoria de programa y de memoria de datos son ajenos. Se puede accesar concurrentemente a instrucciones y a datos. Es mucho más rápida, va de la mano con RISC. 4 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Ilustración 3 Arquitectura Harvard Los componentes de una computadora estan conectados mediante buses: Bus de direcciones: Cuando el procesador “lee instrucciones de” ó “escribe datos a” la memoria a la que desea accesar. Cada dispositivo de E/S como un monitor, teclado o disco duro también tienen una dirección de memoria. Los datos son transferidos vía el bus de datos, cuando el CPU busca datos de la memoria primero se leen las direcciones del bus de direcciones, después el microprocesador genera la señal de lectura, y accede a las instrucciones mediante el bus de datos. El bus de control, consiste en un conjunto de señales dedicadas a realizar operaciones tales como lectura (RD), escritura (WR), especificar si una lectura o escritura se refiere a un dispositivo de memoria, o a un dispositivo de salida (M/IO), la señal de reset etc. 5 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Ilustración 4 Computadora de tres buses Un sistema puede tener una jerarquía de buses: Puede usar bus de direcciones, de datos y de control para accesar a la memoria y a un controlador de E/S. El controlador de E/S, en cambio, podría accesar a todos los dispositivos de E/S usando un segundo bus llamado: Bus local ó Bus de E/S. La perspectiva práctica describe al bus PCI, un bus local usado comunmente en computadoras personales Microcontroladores Un microcontrolador es una computadora completa de capacidades limitadas orientada a efectuar tareas de control, la cual se encuentra encapsulada en un solo circuito integrado. Es un sistema mínimo encapsulado en un solo circuito integrado, el cual contiene memorias de: programa, datos, datos no volátiles (en algunos casos), puertos de entrada/salida, temporizadores/contadores, temporizador vigía, oscilador, unidades de comunicación serial, convertidores analógico digitales etc. Existe una amplia variedad de fabricantes de microcontroladores, entre los cuales podemos mencionar algunos de ellos: INTEL, el cual es considerado como el padre de los microcontroladores, con la familia MCS 8048, posteriormente comercializó a la popular familia MCS 8051, ambas de 8 bits, tiene también poderosas familias de microcontroladores de 16 bits, por ejemplo: MCS96, algunos elementos de esta familia tienen convertidores A/D integrados y otros tienen controladores de motores. MOTOROLA, con sus familias de microcontroladores 68HC05, 68HC07. 6 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos NATIONAL con sus microcontroladores COP 8. ZILOG contribuye con sus dispositivos Z84 y Z86 TEXAS INSTRUMENTS tiene su familia de microcontroladores de 8 bits TMS370, a la cual pertenecen dispositivos con una variedad de periféricos y prestaciones, en encapsulados desde 28 hasta 68 pines. ATMEL inicialmente contribuyó con microcontroladores que eran “clones” de otros fabricantes, especialmente de Intel, pero bajo tecnología Flash, uno de sus elementos característicos es el 89C51, el cual es un clon del Intel 87C51. Actualmente contribuye de manera muy importante con sus microcontroladores AVR. MICROCHIP, con su amplia gama de familias de microcontroladores de 8, 16 y 32 bits, presentan desde microcontroladores en encapsulados de 6 pines, 33 instrucciones y stack de dos niveles (familia 10F), dispositivos de 8 pines con un conjunto de 33 instrucciones (familia 16c5x), familias de 35 instrucciones con chips con una variedad de características y consecuentemente, diversos números de pines (familias 16xxx), familias poderosas de 77 instrucciones, con un tamaño de palabra de instrucción de 16 bits (familias: 17xxx, 18xxx) varios de estos microcontroladores disponen también de interfaz USB., también ofrece sus familias de Controladores digitales de señales: los dsPICs, los cuales son chips poderosos de 16 bits que incluyen instrucciones para procesamiento de señales mediante su máquina DSP, debido al auge que han tenido estos procesadores, el fabricante también ofrece estos chips, pero sin la máquina DSP (para aplicaciones que no usan las instrucciones DSP), obteniendo así la familia PIC24XXX; para realizar aplicaciones inalámbricas: los rfPICs hasta llegar a los poderosos microcontroladores de 32 bits, con la familia PIC32. Cada uno de los fabricantes antes mencionados proveen típicamente de las especificaciones de sus chips (data sheets), notas de aplicación, herramientas de desarrollo etc. Algunos fabricantes venden esta información, otros la proporcionan libremente en sus sitios de internet. NÚMEROS EN BINARIO, HEXADECIMAL Y DECIMAL Antes de entrar de lleno a la revisión de los conceptos arquitectónicos fundamentales de los microcontroladores PIC18F4550, es importante recordar los equivalentes en binario y decimal de los números hexadecimales, ya que la notación hexadecimal es abreviada, debido a que cada uno de sus números representan 4 bits, es más cómodo y menos susceptible de error escribir un número que cuatro: decimal Binario 7 Hexadecim al Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos 0 0000 8 0 Microcontroladores PIC 18F4550 Ejemplos prácticos Ricardo Álvarez González 1 000 1 1 2 001 2 0 3 001 3 1 4 010 4 0 5 010 5 1 6 011 6 0 7 011 7 1 8 100 8 0 9 100 9 1 10 101 A 0 11 101 B 1 12 110 C 0 13 110 D 1 14 111 E 0 15 111 F 1 Tabla 1: Equivalentes binarios y decimales de los números hexadecimales Es altamente recomendable, que el lector memorice estos equivalentes en binario de los números hexadecimales, ya que finalmente cualquier microprocesador y microcontrolador solamente procesa números binarios, pero para las personas que escribirán un programa en lenguaje ensamblador, es más cómodo usar la notación abreviada del hexadecimal. Cualquier número binario puede convertirse rápidamente al hexadecimal agrupando los bits de cuatro en cuatro, iniciando por el bit menos significativo (LSB), por ejemplo: El número de 8 bits 0011 1001, se convierte rápidamente al hexadecimal reemplazando sus dos grupos de 4 bits, por su equivalente en hexadecimal: 39, como veremos posteriormente, por compatibilidad con el lenguaje ensamblador de los PICs, podemos anteponer 0x al número para especificar que se trata de un hexadecimal: 0x39, incluso esta notación nos sirve a nosotros también para no confundirlo con el treinta y nueve decimal. Otro ejemplo: 11001100010, formando grupos de cuatro bits, iniciando por el LSB tenemos: 110 0110 0010 que es equivalente al hexadecimal 0x662, 9 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Nótese que el último grupo solo fue de 3 bits, pero podemos agregarle un cero a la izquierda sin alterar su valor, para completar los cuatro bits, teníamos 110, agregándole el cero: 0110 corresponde al hexadecimal 6. Se pueden agregar los ceros necesarios a la izquierda (correspondiente al número hexadecimal más significativo), para formar grupos de cuatro bits y reemplazarlo por su equivalente hexadecimal fácilmente. Ejercicio 1 Convierta los números binarios a hexadecimal, sustituyendo directamente los grupos de 4 bits por su equivalente en hexadecimal 10 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos a. 110011001010101 b. 110001101010011 c. 101010101110110 d. 110101101001111 e. 100101111101011 Ejercicio 2 Convierta los números hexadecimales a binario, sustituyendo directamente cada dígito decimal por su equivalente binario a. 9896 b. A7F2 c. 73B1 d. D53A e. B3F5 0RGANIZACIÓN DE LA MEMORIA Estos dispositivos cuentan con tres bloques de memoria: Memoria de programa Memoria RAM de datos Memoria EEPROM de datos La memoria de datos y de programa usan buses independientes, lo cual permite acceso concurrente a esos bloques. Organización de la memoria de programa. Un contador de programa de 21 bits es capaz de direccionar un espacio de memoria de programa de 2 Mbyte (MB). Accediendo a una localidad que este entre la memoria implementada físicamente y la dirección 2 MB causará una lectura de ceros (una instrucción NOP). Los PIC 18F4550 tienen 32 Kbyte (KB) de memoria Flash, esto implica que pueden almacenar hasta 16K palabras de instrucción. El vector de reset es la dirección 0000h y existen dos vectores de interrupción: el de alta prioridad tiene la dirección 0008h y el de baja prioridad la 0018h. 11 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos La figura siguiente muestra el mapa de memoria de programa para los dispositivos PIC 18FX550 Ilustración 5 Mapa de memoria de programa Stack La pila (stack) permite cualquier combinación de hasta 31 llamadas y reconocimientos de interrupción. El contador del programa (PC) es metido (pushed) al stack, cuando se ejecuta una instrucción CALL o RCALL o cuando una interrupción es reconocida. El PC es recuperado (pulled) del stack, en cualquiera de las instrucciones siguientes: RETURN, RETLW o RETFIE. El stack funciona como una RAM de 31 palabras de 21 bits cada una y un apuntador del stack (STKPTR) de 5 bits. 12 Microcontroladores PIC 18F4550 Ejemplos prácticos Ricardo Álvarez González La parte alta del stack es de lectura y escritura. Existen tres registros: TOSU, TOSH y TOSL, que mantienen el contenido de la localidad apuntada por el registro STKPTR, esto permite a los usuarios implementar un stack por software si es que fuera necesario. El registro STKPTR contiene el valor del apuntador del stack y los bits de estado STKFUL (stack lleno) y STKUNF (subflujo del stack). El registro 4-1 muestra el registro STKPTR. El apuntador del stack se incrementa cuando se introducen valores en la pila, y se decrementa cuando se extraen valores de ella. Reinicializaciones (resets) por stack lleno, o por desbordamiento por defecto del stack. Estos resets son habilitados por la programación del bit STVREN. Cuando este bit es deshabilitado, la condición de full o de underflow pondrá los bits STKFUL o STKUNF, respectivamente, pero no causará una reinicialización del dispositivo, si el bit STVREN es puesto, además de ponerse los bits antes mencionados en caso de que se llene el stack o se produzca un subflujo, causará que se reinicie (reset) el procesador. Los bits STKFUL y STKUNF deben de limpiarse por software o mediante un reset por apagado del dispositivo (POR). PCL, PCLATH Y PCLATU El contador de programa (PC) especifica la dirección en la que se buscará la instrucción (fetch) para su ejecución. El PC es de 21 bits de ancho. El byte mas bajo es llamado el registro PCL, este registro es de lectura y escritura. El byte alto es el registro PCH, este registro contiene los bits PC<15:8> y no se puede leer o escribir directamente; se pueden hacer actualizaciones al registro PCH se pueden efectuar mediante el registro PCLATH. El byte superior es llamado PCU, este registro contiene los bits PC<20:16> y no se puede leer o escribir directamente, se pueden hacer correcciones al registro PCU mediante el registro PCLATU. El PC direcciona bytes en la memoria de programa. Para prevenir que el PC este desalineado con las palabras de instrucción, el LSB del PCL esta fijo al valor de “0”. El PC incrementa por dos las direcciones de instrucciones secuenciales en la memoria de programa. CICLO DE INSTRUCCIÓN. La entrada de reloj (mediante OSC1) es dividida internamente por cuatro, para generar cuatro señales de reloj en cuadratura, no traslapados, llamados Q1, Q2 Q3 y Q4. Internamente el PC es incrementado cada Q1, la instrucción es buscada de la memoria de programa y capturada en el registro de instrucción en Q4. La instrucción es decodificada y ejecutada durante el siguiente Q1 hasta Q4. Las señales de reloj y la ejecución del flujo de instrucciones se muestran en la siguiente figura: 13 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Ilustración 6 División del ciclo de reloj FLUJO DE INSTRUCCIÓN Y SEGMENTACIÓN. Un ciclo de instrucción consiste de cuatro ciclos Q: Q1, Q2, Q3 y Q4, la búsqueda de la instrucción y la decodificación son segmentadas (pipelined) de tal manera que la búsqueda toma un ciclo de instrucción, mientras que la decodificación y la ejecución toman otro ciclo de instrucción. Sin embargo, debido a la segmentación, cada instrucción se ejecuta efectivamente en un solo ciclo. Si una instrucción causa que el contador de programa cambie (goto, por ejemplo), entonces se necesitan dos ciclos para completar la instrucción. Ilustración 7 Ejemplo de ejecución de instrucciones INSTRUCCIONES EN MEMORIA DE PROGRAMA. La memoria de programa es direccionada en bytes. Las instrucciones son almacenadas como dos o cuatro bytes en memoria de programa. El byte menos significativo de una palabra de instrucción, siempre es almacenado en una localidad de memoria de programa en una localidad par (LSB=0). 14 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos ORGANIZACIÓN DE LA MEMORIA DE DATOS La memoria de datos es implementada como RAM estática. Cada registro en la memoria de datos tiene una dirección de 12 bits, permitiendo hasta 4096 bytes de memoria de datos. En la figura 9 se muestra la organización de la memoria de datos para los PIC18FXX2. El mapa de memoria de datos está dividido en 16 bancos que contienen 256 bytes cada uno. Los cuatro bits menos significativos del registro de selección de bancos (BSR<3:0> seleccionan cual banco será elegido, los cuatro bits más significativos del BSR no son implementados. Ilustración 8 Almacenamiento de instrucciones en memoria de programa La memoria de datos contiene registros de función especial (SFR) y registros de propósito general (GPR). Los SFRs son usados para control y estado del controlador y funciones periféricas, mientras que los GPRs son usados para abastecimiento de datos y para guardar resultados de operaciones de la aplicación del usuario. Los SFRs inician en la última localidad del banco 15 (0xfff) y se extienden hacia abajo. Cualquier espacio disponible mas allá de los SFRs en el banco, podrían implementarse como GPRs. Los GPRs inician en la primera localidad del banco 0 y crecen hacia arriba. Cualquier lectura a una localidad no implementada se leerá como ceros. 15 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Ilustración 9 Mapa de memoria de datos 16 Microcontroladores PIC 18F4550 Ejemplos prácticos Ricardo Álvarez González La memoria de datos puede accederse directa o indirectamente. El direccionamiento directo podría requerir el uso del registro BSR. El direccionamiento indirecto requiere el uso de un registro de selección de archivo (FSR) y un operando de archivo indirecto (INDFn). Cada FSR mantiene una dirección de 12 bits que puede usarse para acceder a cualquier localidad en la memoria de datos, sin necesidad de cambiarse de banco. Para asegurarse que los registros comúnmente usados (SFRs y GPRs seleccionados) puedan accederse en un solo ciclo, sin importar el valor del registro BSR, se ha implementado un banco de acceso. Un segmento del banco 0 y un segmento del banco 15 comprenden el acceso a la RAM. REGISTROS DE FUNCIÓN ESPECIAL Los registros de función especial (SFRs) son registros usados por el CPU y módulos periféricos para controlar la operación deseada del dispositivo. Estos registros se implementan como RAM estática. Los SFRs pueden clasificarse en dos conjuntos: SFRs asociados con el dispositivo genérico o núcleo (core). SFRs asociados con las funciones periféricas. BANCO DE ACCESO El banco de acceso es una mejora arquitectónica la cual es muy útil para la optimización de código de un compilador de C. Las técnicas usadas por un compilador de C pueden ser útiles para programas escritos en ensamblador. La región de la memoria de datos puede utilizarse para: Almacenamiento de cálculo intermedio de valores. Variables locales de subrutinas. Almacenamiento/ conmutación rápido de variables. Variables comunes. Evaluación/ control rápido de SFRs (sin recurrir a los bancos). El banco de acceso está compuesto de los 160 bytes superiores en el banco 15 (SFRs) y los 96 bytes inferiores en el banco 0. Esas dos secciones serán referidas como el acceso a la RAM alta y el acceso a la RAM baja, respectivamente. Un bit en la palabra de instrucción, especifica si la operación ocurre en el banco especificado por el registro BSR o en el banco de acceso. Este bit es denotado por el bit “a” (por bit de acceso). Cuando a=0, implica que se permanece en el banco de acceso y la última dirección en el acceso a la RAM baja es seguida por la primera dirección en el acceso a la RAM alta. El acceso a la RAM alta 17 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos mapea los registros de función especial (SFRs), de tal manera que esos registros pueden accederse sin ningún otro apoyo de software. Esto es útil para verificar las banderas de estado y para modificar los bits de control. REGISTROS DE SELECCIÓN DE BANCOS La necesidad de un espacio grande de memoria de propósito general, origina un esquema de bancos de memoria RAM. La memoria de datos está seccionada en dieciséis bancos. Cuando se usa direccionamiento directo, el registro de selección de banco (BSR) debe configurarse para el banco deseado. BSR<3:0> mantiene los 4 bits superiores de la dirección de 12 bits de la RAM. Los bits BSR<7:4> siempre se leerán como “0”s , y su escritura a ellos no tendrá efecto. La instrucción MOVLB se proporciona en el conjunto de instrucciones, para asistir en la selección de los bancos. Si el banco seleccionado actualmente no está implementado, cualquier lectura será de “0”s, y todas las escrituras serán ignoradas. Los bits del registro de estado (STATUS) serán puestos/ limpiados correctamente, de acuerdo a la instrucción ejecutada. Cada banco se extiende hasta FF (256 bytes). Toda la memoria de datos es implementada como RAM estática. Una instrucción MOVFF ignora el BSR, debido a que las direcciones están incrustadas en la palabra de instrucción. REGISTRO DE ESTADO (STATUS). El registro de estado (le llamaremos simplemente status en lo sucesivo), contiene el estado aritmético del ALU. El registro STATUS puede ser el destino para cualquier instrucción, como sucede con cualquier otro registro. Si el registro STATUS es el destino de una instrucción que afecta a la bandera de cero (Z), al acarreo en el cuarto bit (DC), al acarreo (C), al bit de sobre flujo (OV) o la bandera de signo negativo (N), entonces la escritura a esos cinco bits es deshabilitada. Esos bits son puestos o limpiados de acuerdo a la lógica del dispositivo. Por lo tanto, el resultado de una instrucción con el registro STATUS como destino puede ser diferente del esperado. Se recomienda entonces, que solamente las instrucciones BCF, BSF, SAWPF, MOVFF Y MOVF sean 18 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos usadas para alterar el registro de estado, debido a que esas instrucciones no afectan a los bits de bandera del registro status: Z, C, DC, OV ó N. Ilustración 10 Registro de estado del procesador REGISTRO RCON El registro de control de reset (RCON) contiene los bits de bandera que permiten diferenciar entre las fuentes de reset del dispositivo. Estas banderas incluyen a los bits TO, PD, POR, BOR y RI. Este registro es de lectura y escritura. CONFIGURACIÓN DEL OSCILADOR Los PIC18F2455/2550/4455/4550 cuentan con una amplia variedad de opciones para el oscilador, además,debido a la existencia del módulo USB que requiere una señal de reloj estable, se necesita 19 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos contar con un módulo de reloj independiente para el, que sea compatible con las velocidades de baja y alta velocidad requeridas por el estandar USB. Para cumplr con éstos requerimientos, esta familia tiene una nueva ramificación del reloj, para proporcionar una señal de 48 MHz, para que opere el módulo USB a máxima velocidad. Debido a que esta es derivada a partir de la fuente primaria de oscilación, existe una gran cantidad de preescalers y postscaler para generar una amplia variedad de frecuencias de oscilación. Estos chips pueden funcionar en doce distintas configuraciones del oscilador. Para saber mas: Consulte en las hojas de datos del fabricante, las opciones del oscilador. RESUMEN DEL CONJUNTO DE INSTRUCCIONES Con la finalidad de iniciar con algunos ejemplos de aplicación, se presentarán ahora el conjunto de instrucciones de la familia PIC18FXXX. La mayoría de las instrucciones son ocupan una sola palabra de memoria (16 bits), pero hay tres instrucciones que requieren dos localidades de la memoria de programa. Cada palabra de instrucción es de 16 bits dividida en un código de operación (opcode), lo cual especifica el tipo de instrucción y uno o más operandos, lo cual especifica la operación de la instrucción. El conjunto de instrucciones es altamente ortogonal y está agrupado en cuatro categorías básicas: Operaciones orientadas a bytes. Operaciones orientadas a bits. Operaciones con literales. Operaciones de control. El conjunto de instrucciones de los PIC18FXXX está resumido en la tabla 26-2. La mayoría de las instrucciones orientadas a bytes tienen tres operandos: 1. El registro de archivo (representado por “f”). 2. El destino del resultado (representado por “d”). 3. La memoria accedida (representada por “a”). El operando de registro de archivo “f” indica cual registro de archivo será usado por la instrucción. El operando de destino “d” indica en donde se colocará el resultado de la 20 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos operación: 21 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Si d=0, el resultado es colocado en el registro de trabajo (WREG). Si d=1, el resultado es colocado en el registro f especificado por la instrucción. Todas las instrucciones orientadas a bits tienen tres operandos: 1. El registro de archivo (representado por “f”). 2. El bit en el registro de archivo (representado por “b”). 3. La memoria accedida (representada por “a”). El operando de bit “b”, selecciona el número del bit afectado por la operación, mientras el de registro de archivo “f” representa el número del archivo en el cual está localizado el bit. Las instrucciones de literal pueden usar algunos de los siguientes operandos: Un valor de literal que será cargado en un registro de archivo, especificado por “k”. El registro deseado en el cual se cargará el valor de la literal (representado por “f”). Ningún operando requerido (representado por “-”). Las instrucciones de control pueden usar algunos de los siguientes operandos: Una dirección de memoria de programa (especificado por “n”). El modo de las instrucciones Call o Return (especificado por “s”). El modo de instrucciones para lectura y escritura de la tabla (especificado por “m”). Ningún operando requerido (representado por “-”). 22 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos 23 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos 24 Microcontroladores PIC 18F4550 Ejemplos prácticos Ricardo Álvarez González Todas las instrucciones de una sola palabra son ejecutadas en un solo ciclo, a menos que una prueba condicional sea verdadera, o que el contador de programa haya cambiado como resultado de la instrucción. En esos casos, la instrucción toma dos ciclos de instrucción, con el ciclo de instrucción adicional ejecutado como un NOP. Una vez que se ha presentado superficialmente el repertorio de instrucciones de los PIC18FXXX, para mostrar algunos programas de ejemplo, solo nos hace falta revisar algunas directivas del ensamblador MPASM, que son imprescindibles para escribir programas. PANORAMA GENERAL DE MPASM MPASM es una aplicación basada en el sistema operativo DOS o en WINDOWS, que suministra una plataforma para desarrollar código en lenguaje ensamblador para las familias de microcontroladores PIC de 12-bit, 14-bit, 16-bit, y 16-bit incrementadas de Microchip, manteniendo una compatibilidad directa con el ambiente de desarrollo integrado (IDE) MPLAB. Directivas del lenguaje Las directivas son comandos que aparecen en el código fuente, pero no son traducidas directamente en código de operación. Son usadas para controlar el ensamblador: su entrada, salida y localización de datos. Muchas de las directivas de ensamblador tienen nombres y formatos alternos. Esos podrían existir para proporcionar compatibilidad con ensambladores previos de Microchip y para ser compatible con prácticas individuales de 25 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos programación. 26 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Existen cinco tipos básicos de directivas proporcionadas por MPASM: a. Directivas de control. Permiten secciones de código condicionalmente ensamblado. b. Directivas de datos. Controlan la localización de variables en memoria y proporcionan una manera para referirse a los datos simbólicamente mediante nombres significativos. c. Directivas de listado. Controlan el formato del archivo de listado (*.lst) generado por MPASM. Permitiendo la especificación de títulos, paginación y otros controles del listado. d. Macro directivas. Controlan la localización de datos y la ejecución mediante definiciones de macros. e. Directivas de archivo Objeto. Se usan solamente cuando se crea un archivo objeto. Ahora estamos listos para escribir nuestro primer programa. Se trata de un ejemplo muy simple, en el cual se han colocado leds en cada uno de los pines del PUERTO D, lo que queremos hacer es encender secuencialmente cada uno de ellos, para lo cual debemos de declarar dicho puerto como salida, lo cual conseguimos escribiendo la palabra adecuada de configuración en su registro de dirección de datos TRISD, tomando en cuenta que al escribir un 1 en un bit del registro TRISD, configurará su bit de puerto asociado como entrada, en el caso de escribir un cero se configurará su bit de puerto respectivo como salida. Esto se muestra en las figuras siguientes, debido a que esto se cumple para cualquier bit del puerto D, (y en verdad para cualquier puerto de los microcontroladores PIC), se han representado como los bits de puerto m y n, en donde pueden tener valores máximos entr 0 y 7, ya que PORTD es de 8 bits TRISDm 0 PORTDm Out, Salida TRISD n PORTD n 1 In, entrada Nótese que esto es mas facil de recordar si escribimos los nombres en ingles: 1 In entrada, 0 Out salida TRISD TRISD6 TRISD5 TRISD4 TRISD TRISD TRISD TRISD 7 3 2 1 0 0 0 0 0 0 0 0 0 PORTD PORTD 0 0 PORTD 5 PORTD PORTD PORTD PORTD PORTD 4 3 2 1 0 27 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Salida Salida Salida Salida Salida 28 Salida Salida Salida Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Ejemplo 1 Controlando ocho leds ;****************************************************************************** LIST P=18F4550 ;directiva para efinir el procesador #include ;definiciones de variables especificas del <P18F4550.INC> procesador ;****************************************************************************** ;Bits de configuración CONFIG FOSC = INTOSC_XT ;Oscilador INT usado por el uC , XT usado por el USB CONFIG BOR = OFF ;BROWNOUT RESET DESHABILITADO CONFIG PWRT = ON ;PWR UP Timer habilitado CONFIG WDT = OFF ;Temporizador vigia apagado CONFIG MCLRE=OFF ;Reset apagado CONFIG PBADEN=OFF CONFIG LVP = OFF ;****************************************************************************** ;Definiciones de variables CBLOCK0x000 ;ejemplo de definición de variables en RAM de acceso cont ENDC ;****************************************************************************** ;Reset vector ORG 0x0000 ;Inicio del programa principal bcf OSCCON,IRCF2,0 bsf OSCCON,IRCF0,0 ;Oscilador interno a125 kHz movlw 0x0F movwf ADCON1,0 ;Puertos Digitales clrf PORTD,0 clrf TRISD,0 ;Puerto D Configurado como salida bsf PORTD,0 ;enciende LED conectado en rlcf ,0 corre cal PORTD,F RD0 i l ,0 br retard ;****************************************************************************** a o retard movl 0xff correi o w cont, movwf 0 nop nada cont,1, decfsz 0 bra nada return END Programa E1: Rotación de luces En la figura 11 se muestra una pantalla del ambiente de desarrollo integrado MPLAB. En la ventana en donde pregunta si se desea que el proyecto genere codigo absoluto o relocalizable, debemos seleccionar absoluto, por ahora. 29 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos En la figura 12 se muestra una foto con la conexión de los leds 11 Pantalla de MPLAB 12 Conexión de los leds Para alambrar la práctica en una tablilla de prototipos (proto board), presentamos el diagrama de pines: 30 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Ilustración 13 Diagrama de pines del microcontrolador 18F4550 ;****************************************************************************** LIST P=18F4550 #include <P18F4550.INC> ;directiva para definir el procesador ;definiciones de variables especificas del procesador ;****************************************************************************** ;Bits de configuración CONFIG FOSC = INTOSC_XT ;Oscilador INT usado por el uC , XT usado por el USB CONFIG BOR = OFF ;BROWNOUT RESET DESHABILITADO CONFIG PWRT = ON ;PWR UP Timer habilitado CONFIG WDT = OFF ;Temporizador vigia apagado CONFIG MCLRE=OFF ;Reset apagado CONFIG PBADEN=OFF CONFIG LVP = OFF ;****************************************************************************** ;Definiciones de variables CBLOCK0x000 ;ejemplo de definición de variables en RAM de acceso cont ciclo ENDC ;fin del bloque de constantes ;****************************************************************************** ;Reset vector ORG 0x0000 ;Inicio del programa principal bcf OSCCON,IRCF2,0 bsf OSCCON,IRCF0,0 ;Oscilador interno a125 kHz 31 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos movlw 0x0F movwf ;Puertos Digitales ADCON1,0 clrf PORTD,0 ;Puerto D Configurado como clrf TRISD,0 salida bsf ;enciende LED conectado en correi rlcf PORTD, call repite ;llama a una rutina más larga PORTD,0 RD0 F,0 bra correi ,0 ;****************************************************************************** retardo 0xff movwf cont,0 nada nop decfsz cont,1, 0 bra nada return ;****************************************************************************** repite movlw d'25' ;llama 25 veces a la rutina retardo movwf ciclo llama call retardo decfsz ciclo,F,0 bra llama return END movlw Programa E1.1 Segunda Versión de rotación de luces En la segunda versión del programa de rotación de luces, el tiempo en el que durará encendido cada led, será veinticinco veces más largo que en el ejemplo 1, esto se logra con la subrutina repite la cual llama a la rutina retardo veinticinco veces. Notese como el número de veces se especifica directamente en decimal, para lo cual es necesario encerrar el número entre apóstrofes y debe ir precedido por una d de “decimal”, esto está expresado en la instrucción: movlw d'25' ;llama 25 veces a la rutina retardo Con esta rutina repite se puede modificar el número de veces que se llamará a la rutina retardo Ejemplo 2 Control de un exhibidor de siete segmentos de ánodo común conectado al PORTD. Ahora estamos listos para controlar un exhibidor de siete segmentos. Como ya sabemos existen básicamente dos tipos de displays de siete segmentos, de acuerdo a como se muestra en la siguiente figura: 32 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos 14 Displays de siete segmentos Si ya se entendió el funcionamiento del ejemplo 1, en donde encendemos un led, ahora en este ejemplo podemos encender ocho leds, dispuestos en un exhibidor de siete segmentos, también llamado por su nombre en ingles display; se mostrarán los dígitos del 0 al 9, la duración de exhibición de cada uno de ellos está determinada por la rutina repite del ejemplo anterior. Ejemplo2: Control de un exhibidor de siete segmentos Se muestra en la tabla siguiente, la asignación de los pines del puerto D para la conexión de los segmentos del display: RD7 Punto decima l RD6 G RD5 f RD4 E RD3 d RD2 c RD1 b RD0 A Tabla E2 Los códigos de siete segmentos para el display de ánodo común, (considerando en este caso que encienden con cero) son los siguientes: Hexadecimal Binario C0 Digito 1100 0000 33 0 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos F9 1111 1001 1 A4 1010 0100 2 B0 1011 0000 3 99 1001 1001 4 92 1001 0010 5 82 1000 0010 6 B8 1011 1000 7 80 1000 0000 8 98 1001 1000 9 Ejercicio E2.1 Usando el mismo orden de los bits mostrado en la tabla E2, genere los códigos de siete segmentos para los dígitos hexadecimales faltantes, para un exhibidor de siete segmentos de ánodo común Ejercicio E2.2 Genere los códigos de siete segmentos, usando el mismo orden de los bits mostrado en la tabla E2 para los dígitos hexadecimales, para un exhibidor de siete segmentos de cátodo común ;****************************************************************************** LIST P=18F4550 ;directiva para efinir el procesador #include ;definiciones de variables especificas del <P18F4550.INC> procesador ;****************************************************************************** ;Bits de configuración CONFIG FOSC = INTOSC_XT ;Oscilador INT usado por el uC , XT usado por el USB CONFIG BOR = OFF ;BROWNOUT RESET DESHABILITADO CONFIG PWRT = ON ;PWR UP Timer habilitado CONFIG WDT = OFF ;Temporizador vigia apagado CONFIG MCLRE=OFF ;Reset apagado CONFIG PBADEN=OFF CONFIG LVP = OFF ;****************************************************************************** ;Definiciones de variables ;ejemplo de definición de variables en RAM de CBLOCK0x0 acceso 00 cont ciclo ;fin del bloque de END constantes ;****************************************************************************** C ;Reset vector 34 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos ORG 0x0000 ;Inicio del programa principal bcf OSCCON,IRCF2,0 bsf OSCCON,IRCF0,0 ;Oscilador interno a125 kHz movlw 0x0F ;Puertos Digitales movwf ADCON1, 0 clrf PORTD ;Puerto D Configurado como salida clrf ,0 ;código del cero cero movl TRISD, w 0 0xC0 movwf PORTD,0 ;código del uno call repite movlw 0xF9 ;código del dos movwf PORTD,0 call repite movlw 0xA4 ;código del tres movwf PORTD,0 call repite movlw 0xB0 ;código del cuatro movwf PORTD,0 call repite movlw 0x99 ;código del cinco movwf PORTD,0 call repite movlw 0x92 ;código del seis movwf PORTD,0 call repite movlw 0x82 ;código del siete movwf PORTD,0 call repite ;código del ocho movlw 0xB8 movwf PORTD,0 call repite ;código del nueve movlw 0x80 movwf PORTD,0 call repite movlw 0x98 ;****************************************************************************** retardo movwf PORTD,0 0xff call repite movwf cont,0 bra cero nada nop decfsz cont,1,0 bra nada return ;****************************************************************************** repite d'25' ;llama 25 veces a la rutina retardo 30 movlw movlw Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos movwf ciclo call retardo decfsz llam a ciclo,F,0 bra llama return END Programa E2: Control de un display de siete segmentos Como podemos apreciar en el código anterior, el control del display es muy simple, consiste solamente en enviar cada código por el puerto d y llamar a la rutina repite para que permanezca encendido el tiempo que dure la misma, esto se logra con las instrucciones: Cero movlw 0xC0 ;código del cero movwf PORTD,0 call repite De tal manera que estas tres instrucciones se repiten diez veces, empezando por el código del cero y terminando con el del nueve, después de esto se regresa el programa nuevamente al código del cero, con la instrucción de salto incondicional: bra cero Se muestra en la siguiente figura el diagrama de la simulación en ISIS Proteus: 15 Ventana de simulación en ISIS 31 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Ejercicio E2.3 Vimos que el ejemplo anterior, consistía en una repetición de diez veces del mismo bloque de instrucciones. Reescriba el código del ejemplo 2, disminuyendo el número de instrucciones, usando subrutinas Ejercicio E2.4 Extienda el programa del ejemplo 2, para mostrar los dígitos hexadecimales del 0,1,2,…,F,0… Ejemplo 3: Contador ascendente-descendente Hasta ahora, hemos realizado ejemplos usando únicamente puertos de salida, por lo cual, el siguiente ejemplo usará un puerto de entrada RB0, de acuerdo a como se explica en la siguiente tabla: RB0 1 0 Conteo Ascendente descendent e ;****************************************************************************** LIST P=18F4550 ;directiva para definir el procesador #include ;definiciones de variables especificas del <P18F4550.INC> procesador ;****************************************************************************** ;Bits de configuración ;CONFIG FOSC = INTOSC_XT ;Oscilador INT usado por el uC , XT usado por el USB CONFIG BOR = OFF ;BROWNOUT RESET DESHABILITADO CONFIG PWRT = ON ;PWR UP Timer habilitado CONFIG WDT = OFF ;Temporizador vigia apagado CONFIG MCLRE=OFF ;Reset apagado CONFIG PBADEN=OFF CONFIG LVP = OFF ;****************************************************************************** ;Definiciones de variables ;ejemplo de definición de variables en RAM de CBLOCK acceso 0x000 cont ciclo ;fin del bloque de END constantes ;****************************************************************************** C ;Reset vector ORG 0x0000 ;Inicio del programa principal bcf OSCCON,IRCF2,0 bsf OSCCON,IRCF0,0 ;Oscilador interno a125 kHz movlw 0x0F movwf ADCON1,0 ;Puertos Digitales 32 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos clrf clrf cero movlw movwf call btfss bra movlw uno movwf call btfss bra dos movlw movwf call btfss bra tres movlw movwf call btfss bra cuatro movlw movwf call btfss bra cinco movlw movwf call btfss bra seis movlw movwf call btfss bra siete movlw movwf call btfss bra ocho movlw movwf call btfss bra nueve movlw movwf call btfss bra bra PORTD,0 TRISD,0 0xC0 PORTD,0 repite PORTB,0,0 nueve 0xF9 PORTD,0 repite PORTB,0,0 cero 0xA4 PORTD,0 repite PORTB,0,0 uno 0xB0 PORTD,0 repite PORTB,0,0 dos 0x99 PORTD,0 repite PORTB,0,0 tres 0x92 PORTD,0 repite PORTB,0,0 cuatro 0x82 PORTD,0 repite PORTB,0,0 cinco 0xB8 PORTD,0 repite PORTB,0,0 seis 0x80 PORTD,0 repite PORTB,0,0 siete 0x98 PORTD,0 repite PORTB,0,0 ocho cero ;Puerto D Configurado como salida ;código del cero ;código del uno ;código del dos ;código del tres ;código del cuatro ;código del cinco ;código del seis ;código del siete ;código del ocho ;código del nueve 33 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos ;****************************************************************************** retardo movlw 0xff movwf cont,0 nad nop a decfsz cont,1, 0 bra return nada ;****************************************************************************** ;llama 1 vez a la rutina repite movlw d'1' retardo movwf cicl nada2 nop o call retardo decfs ciclo,1, z bra 0 retur nada2 n END Programa E3: Contador ascendente descendente En este programa, no es necesario declarar el pin RB0, ya que después de un reset, los puertos del microcontrolador están declarados como entrada. Una vez que se ha mostrado un digito en el display, el tiempo determinado por la rutina “repite”, se verifica el nivel en el puerto B, con la instrucción: btfss PORTB,0,0 si el nivel de RB0 es alto, la instrucción brincará la instrucción: bra cero y mandará a escribir en el puerto D el código de siete segmentos del uno, de lo contrario se ramificará para mostrar el código de siete segmentos del cero. El programa está formado por la repetición de las instrucciones mostradas a continuación: ;código del uno 0xF9 PORTD,0 repite PORTB,0 ,0 Se observa el programa E3 la secuencia completa, notando que si el nivel en RB0 bra encero es alto, el conteo será ascendente, de lo contrario será descendente. uno movlw movwf call btfss Ejercicio E3.1 Agregue al programa 3 las instrucciones necesarias para exhibir los dígitos hexadecimales de la A a la F Interrupciones Esta familia de microcontroladores tiene múltiples fuentes de interrupción. Una interrupción consiste en que el procesador suspende temporalmente la tarea que está ejecutando para atender a algún periférico, mediante la ejecución de una rutina de servicio de interrupción, una vez que se concluye esta, el procesador continua con la tarea que estaba ejecutando antes de haber sido 34 Microcontroladores PIC 18F4550 Ejemplos prácticos Ricardo Álvarez González interrumpido. A diferencia de una subrutina ordinaria que termina con una instrucción return, Las rutinas de servicio de interrupción deben concluir con la instrucción retfie que significa “retorno de interrupción habilitada” (return from interrupt enable). Al momento de la suspensión de una tarea, la dirección de la siguiente instrucción que debería ejecutar, se guarda en el stack, y se carga el contador de programa con el vector de interrupción. Para los PICS18 existen dos vectores de interrupción: 0x0008 vector de interrupción de alta prioridad 0x0018 vector de interrupción de baja prioridad Cada fuente de interrupción tiene tres bits para controlar su funcionamiento: 1. El bit de habilitación 2. El bit de bandera 3. El bit de prioridad de interrupción Existen diez registros para el control de interrupciones: RCON Registro de control de reset, tiene el bit de habilitación de prioridad de interrupción INTCON INTCON2 Registro de control de interrupciones Registro de control de interrupciones INTCON3 Registro de control de interrupciones PIR1, PIR2 Registros de solicitud de interrupción, contiene los bits de bandera de las interrupciones periféricas Registros de habilitación de interrupción, contiene los bits de habilitación de las interrupciones periféricas Registros de prioridad de interrupción PIE1, PIE2 IPR1, IPR2 Para saber más, se recomienda revisar en las hojas de datos del fabricante DS39632C: Registros INTCON Registros PIR Registros PIE Registros IPR Registros RCON Timers Los timers denominados temporizadores en español, son dispositivos que nos proporcionan intervalos regulares de tiempo. Prácticamente cualquier fabricante de 35 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos microcontroladores incluye 36 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos por lo menos un timer en sus dispositivos, pueden programarse para un intervalo de tiempo, y una vez que se cumple, interrumpen al procesador para avisarle que ha transcurrido el tiempo programado. Pero existen muchas maneras de generar intervalos de tiempo. En la antigüedad existieron unos dispositivos denominados clepsidras, que eran unos tipos de relojes que funcionaban a base de agua. Algo similar podemos hacer con la cubeta que se llena con una llave de agua, como la que se muestra en la figura 5, supongamos que colocamos una cubeta vacia, abrimos la llave y cuando se llena, han transcurrido 10 segundos, para que no se riegue el agua cerramos la llave justo cuando empieza a desbordarse el agua. Sabiendo que la cubeta se desbordará en 10 segundos, podemos lograr que este sistema nos indique cuando ha transcurrido un tiempo menor, por ejemplo, si quisiéramos que nos indique el tiempo de tres segundos, bastaría con depositar en la cubeta, un valor de precarga de 7/10 de su capacidad, de tal manera que cuando se desborde, habrán transcurrido los tres segundos. 16 Con la llave de agua abierta la cubeta se llena en 10 segundos Para obtener intervalos de tiempo mayores con este mismo sistema, podríamos disminuir el chorro de agua, cerrando un poco la llave, de tal manera que supongamos que con este ajuste de la llave, al colocar la cubeta vacía, tarda ahora 10 minutos en llenarse. 37 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos 17 Con el chorro de agua pequeño, la cubeta se llena en 10 minutos ¿Cuál será el valor de precarga necesario para que este sistema nos indique que ha transcurrido un tiempo de 6 minutos? Seria depositar en la cubeta 4/10 de su capacidad. Si se ha entendido el funcionamiento de este sistema, se entenderá fácilmente el funcionamiento típico de los timers. La familia a la que pertenece el PIC18F4550 incluye los timers: Time r Temporizador/contador 0 Temporizador/contador 1 Timer2 Temporizador/contador 3 Número de bits 8ó 16 16 8 16 Temporizador/Contador 0 Este periférico puede funcionar como timer, teniendo como base de tiempo, el ciclo interno de ejecución de instrucciones Fosc/4, pero también puede funcionar como contador, contando los impulsos que le llegan por el pin RA4 en su función alterna T0CKI (Timer 0 Clock Input). Este periférico puede funcionar en dos modalidades: 8 y 16 bits En la figura siguiente, se muestra el diagrama de bloques del timer 0 en modo de 8 bits. Como se puede observar, existen multiplexores para seleccionar mediante sus bits de 38 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos selección (los cuales 39 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos son bits de control del timer) su funcionamiento, esto se logra con el bit TOCS (Timer 0 Clock Select) de tal manera que: TOC Configuració S n 0 Selecciona como señal de sincronía el ciclo interno de instrucción Fosc/4 es decir, funciona como timer 1 Selecciona como señal de sincronía los flancos provenientes del pin RA4/T0CK1, funcionando entonces como contador externo El bit TOSE (Timer 0 Select Edge) selecciona el flanco con el que se incrementará el registro TMR0L TOSE 0 1 18 Flanco activo para incrementar TMR0L Ascendente Descendente Diagrama de bloques del Timer contador 0 en modo de 8 bits Como podemos observar en la figura se puede seleccionar un pre divisor (prescaler) programable, la selección de este pre divisor se selecciona con el bit PSA PSA 0 1 Prescaler Asignado No asignado El pre divisor sirve para incrementar la capacidad del timer, si no está asignado, el timer se incrementará cada vez que reciba un flanco, ó con cada ciclo de instrucción, según se halla programado como contador o temporizador, respectivamente. Este divisor se puede programar con los bits T0PS (Timer 0 Preescaler Select) de acuerdo a como lo indica la siguiente tabla: T0PS T0PS 2 1 0 0 0 0 0 1 T0PS 0 0 1 0 40 Valor del Prescaler 2 4 8 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos 0 1 1 0 1 0 41 16 32 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos 1 1 1 0 1 1 1 0 1 64 128 256 Estos bits de configuración que hemos descrito, están en el registro de control del timer0, llamado T0CON: R/W-1 R/W-1 R/W-1 T08BIT R/W1 TOCS TMR0O N Bit 7 R/W-1 R/W-1 TOSE R/W1 PSA T0PS2 T0PS1 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 R/W1 T0PS 0 Bit 0 Como podemos ver en la tabla anterior, el renglón superior indica el valor de los bits después de un reset, R/W indica que los bits son de lectura/escritura, el renglón inferior indica el número de bit. Ya explicamos el funcionamiento de cada bit, solamente faltaron los bits 7 y 6, los cuales tienen la función: TMR0O N 0 1 Función Timer 0 Apagado Timer 0 Encendido Función Timer/Contador 0 de 16 bits Timer/Contador 0 de 8 bits T08BIT 0 1 En la siguiente figura se muestra el diagrama de bloques del temporizador/ contador 0, en modalidad de 16 bits. Como podemos apreciar en la figura, la diferencia es que se tienen dos registros de 8 bits, TMR0L y TMR0H, para formar un temporizador/ contador de 16 bits. 42 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos 19 Diagrama de bloques del temporizador/contador 0 en modo 16 bits Ahora, recordando nuestro sistema de la cubeta, mostrado en las figuras 5 y 6, podemos hacer una analogía entre él y el timer: El prescaler viene siendo la llave, ya que con ella se regula el chorro de agua, y consecuentemente el tiempo en que tardará en desparramarse El registro del timer, es equivalente a la capacidad del recipiente, por ejemplo para el modo de 16 bits, ya no hablaríamos de una cubeta, sino tal vez de un tonel La cantidad de agua que se deposita previamente en la cubeta, para generar intervalos de tiempo más pequeños, funciona exactamente de la misma manera que el valor de precarga del timer La interrupción se genera al desbordarse el timer, de la misma manera que nosotros tenemos que suspender lo que hacemos, cuando escuchamos que se empieza a desparramar el agua, y corremos a cerrar la llave de agua. Para los PICS, podemos usar una expresión para calcular el valor de precarga necesario: Temporización=4.Tosc.valor_prescaler.valor_del_timer (1 ) En donde Tosc es el valor del periodo del oscilador principal del microcontrolador De tal manera que: Valor_del_timer=Temporización/(4.Tosc.valor_prescaler) (2) Debemos de tomar en cuenta, que este valor obtenido en la expresión 2, tenemos que restarlo del máximo valor del timer (de la misma manera que restábamos la cantidad de agua de la capacidad total de la cubeta). De tal manera que: Valor_precarga=máximo valor del timer-valor_del_timer 43 (3) Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos O equivalentemente: Valor_precarga= máximo valor del timer-Temporización/(4.Tosc.valor_prescaler) El máximo valor para un timer de 8 bits es 0xFF +1, ya que se desborda al iniciar nuevamente en cero, en decimal este valor es 256. (4) Para un timer de 16 bits el máximo valor al que puede llegar es 0xFFFF y se desborda en 0xFFFF+1, es decir 65536 en decimal. Para saber más, se recomienda revisar en las hojas de datos del fabricante DS39632C: Módulo timer 0 Módulo timer 1 Módulo timer 2 Módulo timer 3 Ejemplo 4 Ahora estamos listos para nuestro siguiente ejemplo, usando el timer 0. Se quiere generar un tiempo de 500 ms, considerando que el oscilador principal funciona a una frecuencia de 4 MHz y un prescaler de 64, sustituyendo estos valores en la ecuación 3 tenemos: Valor_del_timer=500 ms/(4*0.25 µs*64) =500 ms/64 µs =7812.5 Debido a que solo podemos usar valores enteros, el valor del timer es 7812, y notamos también que debemos de usar el timer de 16 bits, pero recordemos que este valor tenemos que restarlo del valor máximo. Por lo que: Valor_precarga=65536-7812=57724 Este valor tenemos que cargarlo en los registros TMR0H y TMR0L, por lo que debemos de convertir el valor a hexadecimal, que es 0xE17C. Esto se hará con las instrucciones: movlw 0xE1 movwf TMR0H,0 movlw 0x7c movwf TMR0L,0 ;valor de precarga para 500ms a 4MHz Ejercicios E4.1 a. Considerando un pre divisor de 32 y una frecuencia del oscilador principal de 1 MHz, calcule el valor necesario de precarga del timer 0, para generar un intervalo de tiempo de 100 ms. b. Use el timer 0, para generar una frecuencia de 440 Hz, proponga los valores necesarios del oscilador principal, así como del pre divisor 44 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Ahora debemos configurar los registros necesarios para activar el timer: T0CON R/W-1 R/W-1 R/W1 TOCS R/W-1 R/W1 PSA R/W-1 R/W-1 R/W1 TMR0O T08BIT TOSE T0PS2 T0PS1 T0PS N 0 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 1 0 0 1 0 1 0 1 Este valor binario 1001 0101 equivale a 0x95, que debemos cargar en el registro T0CON El valor de precarga 0xE17C se cargará en los registros del timer, por lo tanto 0xE1 debe cargarse en TMR0H y 0x7C en TMR0L Para el funcionamiento óptimo del timer debemos configurar su interrupción, esto se hace en el registro INTCON, habilitando los bits: GIE/GIEH=1, bit de habitación global de interrupciones TMR0IE=1, bit de habilitación de interrupción del timer 0 INTCON R/W-0 R/W-0 GIE/GIEH PEIE/GIE L Bit 7 Bit 6 1 0 R/W-0 TMR0IE R/W-0 INT0IE R/W-0 RBIE R/W-0 TMR0IF R/W-0 INT0IF R/W-x RBIF Bit 5 1 Bit 4 0 Bit 3 0 Bit 2 0 Bit 1 0 Bit 0 0 Por lo que el valor de configuración para INTCON es 1010 0000, 0xA0 Ejercicios E4.2 Escriba el valor necesario para el registro T0CON para los requerimientos de los ejercicios E4.1 El programa siguiente, es la versión mejorada del contador ascendente, descendente, aquí la duración de cada número exhibido es de exactamente 500 ms. La rutina repite ahora es más eficiente y controlada por el timer 0. Nótese que ahora se configuró el oscilador interno del µc a 4 MHz, de acuerdo a los cálculos realizados. Los cambios con respecto al programa anterior están en rojo. ;****************************************************************************** LIST P=18F4550 #include <P18F4550.INC> ;directiva para definir el procesador ;definiciones de variables especificas del procesador 45 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos ;****************************************************************************** ;Bits de configuración CONFIG FOSC = INTOSC_XT ;Oscilador INT usado por el uC , XT usado por el USB CONFIG BOR = OFF ;BROWNOUT RESET DESHABILITADO CONFIG PWRT = ON ;PWR UP Timer habilitado CONFIG WDT = OFF ;Temporizador vigia apagado CONFIG MCLRE=OFF ;Reset apagado CONFIG PBADEN=OFF CONFIG LVP = OFF ;****************************************************************************** ;Definiciones de variables CBLOCK 0x000 ;ejemplo de definición de variables en RAM de acceso flags ;definimos la dirección 0 como registro de banderas ENDC ;fin del bloque de constantes ;****************************************************************************** ORG 0x0000 ; vector de reset bra inicio org 0x08 ;vector de interrupción bra RST0 ;ramifica servicio interrupción T0 org 0x0020 inicio bsf OSCCON,IRCF2,0 ;Inicio del programa principal bsf OSCCON,IRCF1,0 ;Oscilador interno a 4 MHz bcf OSCCON,IRCF0,0 movlw 0x0F movwf ADCON1,0 ;Puertos Digitales clrf PORTD,0 clrf TRISD,0 ;Puerto D Configurado como salida movlw 0x95 movwf T0CON,0 ;timer 16 bits prescalerX64 movlw 0XA0 movwf INTCON,0 ;interrupcion TMR0 habilitada movlw 0xE1 movwf TMR0H,0 movlw 0x7c movwf TMR0L,0 ;valor de precarga para 500ms a 4MHz movlw 0xC0 cero ;código del cero movwf PORTD,0 call repite btfss PORTB,0,0 bra nueve uno ;código del uno movlw 0xF9 movwf PORTD,0 call repite btfss PORTB,0,0 bra cero dos movlw 0xA4 ;código del dos movwf PORTD,0 call repite btfss PORTB,0,0 bra uno 46 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos tres movlw movwf 0xB0 PORTD,0 ;código del tres 47 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos call repite btfs PORTB,0,0 s bra dos movlw 0x99 cuatro ;código del cuatro movwf PORTD,0 call repite btfss PORTB,0,0 bra tres cinco ;código del cinco movlw 0x92 movwf PORTD,0 call repite btfss PORTB,0,0 bra cuatro seis movlw 0x82 ;código del seis movwf PORTD,0 call repite btfss PORTB,0,0 bra cinco movlw 0xB8 siete ;código del siete movwf PORTD,0 call repite btfss PORTB,0,0 bra seis ocho ;código del ocho movlw 0x80 movwf PORTD,0 call repite btfss PORTB,0,0 bra siete nueve movlw 0x98 ;código del nueve movwf PORTD,0 call repite btfss PORTB,0,0 bra ocho bra cero *************************************** ;******************* ******************** repite btfss flags,0,0 bra repite bcf flags,0,0 return ;****************************************************************************** RST0 bcf INTCON,TMR0IF,0 ;apagamos bandera timer0 movlw 0xE1 movwf TMR0H,0 movlw 0x7c ;valor de precarga para 500ms a 4MHz movwf TMR0L,0 bsf flags,0,0 retfie END Programa 4: Usando el timer 0 para encender cada dígito del display durante exactamente 500 ms 48 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Diagrama de simulación en ISIS del Programa 4 20 INTERRUPCIÓN EXTERNA 1 Ya revisamos en el ejemplo anterior cómo funciona la interrupción del temporizador 0. Ahora veremos cómo funciona la interrupción externa INT1. Recordemos que para lograr que el contador fuera ascendente o descendente, dependía del valor del nivel lógico presente en el puerto de entrada RB0: RB0 1 0 Conteo Ascendente descendent e Nuestra nueva versión de este programa, hará uso de la interrupción externa INT1, la cual está asociada al puerto de entrada RB1, colocaremos en este pin un botón pulsador y en vez de detectar un nivel lógico en este pin, se detectará un flanco ascendente generado por el accionamiento de este botón, que interrumpirá al procesador y en su rutina de servicio de interrupción modificaremos el valor de una bandera de propósito general, para cambiar el sentido del contador. Para activar la interrupción INT1, debemos: poner el bit INT1IE del registro INTCON3: limpiar el bit INT1IP, ya que le asignaremos un nivel de prioridad bajo a esta interrupción INTCON3 R/W-1 R/W-1 U-0 R/W-0 INT2IP INT1IP - INT2IE Bit 7 1 Bit 6 0 Bit 5 0 Bit 4 0 R/W0 INT1I E Bit 3 1 49 U-0 R/W-0 R/W-x - INT2IF Bit 2 0 Bit 1 0 INT1I F Bit 0 0 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Según la tabla anterior, el valor para el registro INTCON3 sera: 1000 1000 es decir 0x88 En este programa ejemplificaremos el uso de prioridades de interrupción, por lo que el timer 0, lo dejaremos en alta prioridad y la interrupción externa en baja, pero debemos de activar el bit de habilitación de prioridades de interrupción IPEN (Interrupt Priority ENable), que está ubicado en el registro de control de reset RCON: RCON R/W-0 R/W-1 U-0 R/W-1 R-1 R-1 R/W-0 SBORE /RI /T0 N Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Para activar este bit lo haremos con la instrucción: /PD /POR R/W0 /BOR Bit 2 Bit 1 Bit 0 IPEN bsf RCON,IPEN,0 ;habilitamos prioridades de interrupción En el ejemplo anterior, solamente teníamos una interrupción activa: la del timer 0, que funcionaba en alta prioridad, ya que no habíamos activado las prioridades de interrupción; esta interrupción cuando se generaba, respondía en el vector 0x08. Ahora se adicionan prioridades de interrupción e INT1, le asignamos baja prioridad, por lo que responderá en el vector de baja prioridad de interrupción 0x 18. Para saber más, se recomienda revisar en las hojas de datos del fabricante, DS39632C: Interrupciones en los pines INTn En el siguiente programa se muestran en rojo las instrucciones correspondientes a la activación de la interrupción INT1, así como también las instrucciones que se modificaron como consecuencia de este cambio Ejemplo 5 Contador ascendente descendente, usando el timer 0 y la interrupción externa INT1 50 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos ;****************************************************************************** LIST P=18F4550 ;directiva para definir el procesador #include ;definiciones de variables especificas del <P18F4550.INC> procesador ;****************************************************************************** ;Bits de configuración ;CONFIG FOSC = INTOSC_XT ;Oscilador INT usado por el uC , XT usado por el USB CONFIG BOR = OFF ;BROWNOUT RESET DESHABILITADO CONFIG PWRT = ON ;PWR UP Timer habilitado CONFIG WDT = OFF ;Temporizador vigía apagado CONFIG MCLRE=OFF ;Reset apagado CONFIG PBADEN=OFF CONFIG LVP = OFF ;****************************************************************************** ;Definiciones de variables CBLOCK 0x000 ;ejemplo de definición de variables en RAM de acceso flags ;banderas 51 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos ENDC ;fin del bloque de constantes ;****************************************************************************** ;Reset vector ORG 0x0000 bra inicio org 0x08 ;vector de alta prioridad bra RST0 ;ramifica servicio interrupcion T0 org 0x18 ;vector de baja prioridad bra RSINT org 0x0020 ;Inicio del programa principal inicio bsf OSCCON,IRCF2,0 bsf OSCCON,IRCF1,0 bcf OSCCON,IRCF0,0 movlw 0x0F movwf ADCON1,0 clrf PORTD,0 clrf TRISD,0 movlw 0x95 movwf T0CON,0 movlw 0XE0 movwf INTCON,0 bsf RCON,IPEN,0 movlw 0xE1 movwf TMR0H,0 movlw 0x7c movwf TMR0L,0 movlw 0x88 movwf INTCON3,0 cero movlw 0xC0 movwf PORTD,0 call repite btfss flags,1,0 bra nueve uno movlw 0xF9 movwf PORTD,0 call repite btfss flags,1,0 bra cero movlw 0xA4 dos movwf PORTD,0 call repite btfss flags,1,0 bra uno tres movlw 0xB0 movwf PORTD,0 call repite btfss flags,1,0 bra dos cuatro movlw 0x99 movwf PORTD,0 call repite ;Oscilador interno a 4 MHz ;Puertos Digitales ;Puerto D Configurado como salida ;timer 16 bits prescalerX64 ;interrupciones TMR0,prioridad habilitada ;habilitamos prioridades de interrupción ;valor de precarga para 500ms a 4MHz ;habilitamos int1 en baja prioridad ;código del cero ;código del uno ;código del dos ;código del tres ;código del cuatro 52 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos btfss bra movlw movwf call flags,1,0 tres cinco 0x92 ;código del cinco PORTD, 0 repite btfss flags,1,0 bra cuatro movlw 0x82 seis ;código del seis movwf PORTD, 0 call repite btfss flags,1,0 bra cinco siete ;código del siete movlw 0xB8 movwf PORTD, 0 call repite btfss flags,1,0 bra seis ocho movlw 0x80 ;código del ocho movwf PORTD, 0 call repite btfss flags,1,0 bra siete movlw 0x98 nueve ;código del nueve movwf PORTD, 0 call repite btfss flags,1,0 bra ocho bra cero ;******************** ********************************************************** repite btfss flags,0,0 bra repite bcf flags,0,0 return ;****************************************************************************** RST0 bcf INTCON,TMR0I ;apagamos bandera timer0 F,0 movlw 0xE1 movwf TMR0H,0 movlw 0x7c movwf TMR0L,0 ;valor de precarga para 500ms a 4MHz bsf flags,0,0 retfie ;******************************************************************** RSINT bcf INTCON3,INT1IF,0 ;Limpiamos bandera de interrupción btg flags,1,0 ;bit monitor de interrupción retfie END 53 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Programa 5 Contador ascendente descendente con interrupciones del timer e INT1 54 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Diagrama de simulación del contador con interrupción externa 21 Como hemos visto, en el programa anterior, mandamos a exhibir los códigos de manera directa, uno por uno, con la consecuencia de que el programa tiene una secuencia repetitiva de instrucciones, pero ¿qué pasaría si quisiéramos usar dos displays y exhibir un conteo hasta el 99? ¡No sería conveniente repetir una secuencia de instrucciones 100 veces!, por lo cual tenemos que usar otro método más eficiente para enviar los códigos de siete segmentos al PORTD, que veremos en la siguiente sección. Ejemplo 6: Manejando tablas por el método del “goto calculado” Para crear tablas de búsqueda en memoria de programa con los microcontroladores PIC18, existen dos métodos: 1. Goto calculado 2. Instrucciones específicas de lectura de tabla En este ejemplo, veremos el primer método. Para crear un goto calculado, es necesario primero cargar el valor de desplazamiento en el registro w y sumar un valor de desplazamiento (offset) al contador de programa, seguida de un grupo de instrucciones retlw nn, como se muestra a continuación: movf tabla desplazamiento, W call tabla . . addwf PCL retlw nn retlw nn . . retlw nn El valor del desplazamiento indica el número de bytes que debe avanzar el contador de programa y debe ser un múltiplo de dos. Este método recibe el nombre de goto calculado, porque igual que 55 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos una instrucción goto, realiza una ramificación, o equivalentemente un salto; pero se logra sumando un valor al contador de programa. Debido a que únicamente se suma el desplazamiento al PCL, debe tenerse cuidado de que el grupo de instrucciones retlw nn, no cruce una página de 256 bytes, ya que el PCL es de 8 bits, y cundo cambie de FF a 00, no generará un acarreo hacia el registro PCH, ocasionando un salto fuera del grupo de instrucciones retlw nn, afectando la secuencia del programa, que percibiremos como un funcionamiento errático del mismo. Veamos la nueva versión del contador ascendente-descendente del 0 al 9: ;****************************************************************************** LIST P=18F4550 ;directiva para definir el procesador #include ;definiciones de variables especificas del <P18F4550.INC> procesador ;****************************************************************************** ;Bits de configuración ;CONFIG FOSC = INTOSC_XT ;Oscilador INT usado por el uC , XT usado por el USB CONFIG BOR = OFF ;BROWNOUT RESET DESHABILITADO CONFIG PWRT = ON ;PWR UP Timer habilitado CONFIG WDT = OFF ;Temporizador vigia apagado CONFIG MCLRE=OFF ;Reset apagado CONFIG PBADEN=OFF CONFIG LVP = OFF ;****************************************************************************** ;Definiciones de variables CBLOCK ;ejemplo de definición de variables en RAM de 0x000 acceso flags ;banderas índic ;fin del bloque de e constantes ;****************************************************************************** END ORG 0x0000 ;vector de reset C br inicio a 0x08 ;vector de alta prioridad or RST0 ;ramifica servicio interrupcion g 0x18 T0 br RSIN ;vector de baja prioridad a T or 0x002 inici g 0 o br OSCCON,IRCF ;Oscilador interno a 4 MHz a 2,0 or OSCCON,IRCF ;Puertos Digitales g 1,0 bsf OSCCON,IRCF ;Puerto D Configurado como bsf 0,0 0x0F salida movlw ADCON1 0x95 bcf movwf ,0 T0CON,0 ;timer 16 bits movl prescalerX64 movlw 0XE0 w PORTD,0 movwf TRISD,0 INTCON,0 ;interrupciones TMR0,prioridad movw bsf RCON,IPEN,0 ;habilitamos fhabilitada clrf prioridades de interrupción clrf 56 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos movl 0xE1 w TMR0H,0 movwf movlw 0x7c movwf TMR0L,0 ;valor de precarga para 500ms a 4MHz movlw 0x88 movwf INTCON3,0 ;habilitamos int1 en baja prioridad limpia clrf indice,0 ;inicia en cero call tabla next ;exhibe el número movwf PORTD,0 call repite tst btfss flags,1,0 ;¿ascendente o descendente? bra decre ;conteo ascendente incf indice,F,0 movf indice,W,0 xorlw 0x0a ;verifica límite superior de tabla btfss STATUS,Z,0 bra next bra limpia decf indice,F,0 decre ;conteo descendente movf indice,W,0 xorlw 0xFF ;verifica límite inferior de tabla, FF=-1 btfsc STATUS,Z,0 bra inid llama call tabla movwf PORTD,0 ;exhibe el número call repite bra tst inid movlw 0x09 ;reinicia en nueve movwf indice,0 bra llama ****************************************** ;******************** **************** repite btfss flags,0,0 bra repite bcf flags,0,0 return ;****************************************************************************** RST0 bcf ;apagamos bandera timer0 INTCON,TMR0IF,0 movlw 0xE1 movwf TMR0H,0 movlw 0x7c movwf TMR0L,0 ;valor de precarga para 500ms a 4MHz bsf flags,0,0 retfie ;*********** ************************* ******************************** RSINT bcf INTCON3,INT1IF,0 ;Limpiamos bandera de interrupción btg flags,1,0 ;bit monitor de interrupción retfie ;******************** tabla **************** ******************************** rlcf indice,W,0 ;multiplica índice por 2 addwf PCL,F,0 ;ajusta el PCL de acuerdo al valor del índice retlw 0xC0 ;código del cero retlw 0xf9 ;código del uno retlw 0xA4 ;código del dos 57 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos retlw retlw retlw retlw retlw retlw retlw end 0xb0 0x99 0x92 0x82 0xb8 0x80 0x98 ;código del tres ;código del cuatro ;código del cinco ;código del seis ;código del siete ;código del ocho ;código del nueve Programa 6, contador ascendente-descendente del 0 al 9, usando tablas con goto calculado Como podemos ver en el programa 6, la rutina tabla implementa el método de goto calculado, vemos que en comparación con el programa 5, esta versión es más compacta. Las modificaciones de este programa aparecen en rojo. Cada uno de los códigos de siete segmentos forma parte de una instrucción retlw, de tal manera que cuando se produce el retorno de subrutina, el registro W contiene este código; por lo tanto, usando este método se puede almacenar un dato de un byte por cada palabra de instrucción, que como recordamos, es de dos bytes. Ejemplo 7, tablas de búsqueda en memoria de programa usando instrucciones de lectura de tabla Ahora veremos el segundo método, que ya habíamos mencionado. Para tener un alcance suficiente, en los PIC18 que tengan mayor capacidad de memoria de programa, tenemos un apuntador de tabla de 24 bits, llamado TBLPTR (TaBLe PoinTeR) que está distribuido en tres registros de 8 bits: TBLPTRL TBLPTRH TBLPTRU Apuntador de tabla parte superior TBLPTRU Apuntador de tabla parte alta TBLPTRH Apuntador de tabla parte baja TBLPTRL También existe un registro llamado TABLAT (TABle LATch), para almacenar el dato leído, correspondiente a la dirección especificada por TBLPTR. 58 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos En la figura se muestra una operación de lectura de tabla TBLRD *, existen cuatro instrucciones de lectura de TABLA: TBLRD * TBLRD *+ TBLRD +* TBLRD *- Lectura de tabla Lectura de tabla con pos incremento del apuntador Lectura de tabla con pre incremento del apuntador Lectura de tabla con pos decremento del apuntador También existen las instrucciones equivalentes para la escritura en memoria de tabla 59 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos TBLWT * TBLWT *+ TBLWT +* TBLWT *- Escritura de tabla Escritura de tabla con pos incremento del apuntador Escritura de tabla con pre incremento del apuntador Escritura de tabla con pos decremento del apuntador Presentamos ahora nuestro contador ascendente del 0 al 9, usando instrucciones de lectura de tabla ;****************************************************************************** LIST P=18F4550 #include <P18F4550.INC> ;directiva para definir el procesador ;definiciones de variables especificas del procesador ;****************************************************************************** ;Bits de configuración CONFIG FOSC = INTOSC_XT ;Oscilador INT usado por el uC , XT usado por el USB CONFIG BOR = OFF ;BROWNOUT RESET DESHABILITADO CONFIG PWRT = ON ;PWR UP Timer habilitado CONFIG WDT = OFF ;Temporizador vigia apagado CONFIG MCLRE=OFF ;Reset apagado CONFIG PBADEN=OFF CONFIG LVP = OFF ;****************************************************************************** ;Definiciones de variables CBLOCK 0x000 ;ejemplo de definición de variables en RAM de acceso flags ;banderas ENDC ;fin del bloque de constantes ;****************************************************************************** ;Reset vector ORG 0x0000 bra inicio ;vector de alta prioridad org 0x08 bra RST0 ;ramifica servicio interrupcion T0 org 0x18 ;vector de baja prioridad bra RSINT org 0x0020 ;Inicio del programa principal inicio bsf OSCCON,IRCF2,0 bsf OSCCON,IRCF1,0 bcf OSCCON,IRCF0,0 ;Oscilador interno a 4 MHz movlw 0x0F movwf ADCON1,0 ;Puertos Digitales clrf PORTD,0 clrf TRISD,0 ;Puerto D Configurado como salida movlw 0x95 movwf T0CON,0 ;timer 16 bits prescalerX64 movlw 0XE0 movwf INTCON,0 ;interrupciones TMR0,prioridad habilitada bsf RCON,IPEN,0 ;habilitamos prioridades de interrupcion movlw 0xE1 movwf TMR0H,0 60 Microcontroladores PIC 18F4550 Ejemplos prácticos Ricardo Álvarez González movl 0x7c ;valor de precarga para 500ms a 4MHz w TMR0L,0 movwf 0x88 movl INTCON3,0 ;habilitamos int1 en baja prioridad w movwf clrf TBLPTRL,0 movlw 0x02 movwf TBLPTRH,0 clrf TBLPTRU,0 ;tblptr=0x000200 lee tblrd *+ ;lee tabla e incrementa apuntador movff TABLAT,PORTD call repite movf TBLPTRL,W,0 xorlw 0x0a btfss STATUS,Z,0 bra lee clrf TBLPTRL,0 goto lee ;********* *********** ******************* *************************************** repite btfss flags,0,0 bra repite bcf flags,0,0 return ;****************************************************************************** RST0 bcf INTCON,TMR0IF,0 ;apagamos bandera timer0 movlw 0xE1 movwf TMR0H,0 movlw 0x7c movwf TMR0L,0 ;valor de precarga para 500ms a 4MHz bsf flags,0,0 retfie ;******************************************************************** RSINT bcf INTCON3,INT1IF,0 ;Limpiamos bandera de interrupción btg flags,1,0 ;bit monitor de interrupción retfie ;******************************************************************** or 0x20 ;DB directiva que Define g 0 Byte DB 0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xB8,0x8 0,0x98 END Programa 7, usando instrucciones de lectura de tabla Nuevamente en el programa 7, se muestran en rojo, las instrucciones usadas para la lectura de tablas. Iniciamos el apuntador de tabla, TBLPTR con la dirección 0x200, nótese que esto lo hacemos al configurar los tres registros correspondientes al apuntador. También usamos una nueva directiva: DB, la cual sirve para definir un byte a partir de la dirección especificada por la directiva ORG que la antecede, en nuestro caso, indica la dirección 0x200, a partir de esta dirección definimos nuestros códigos de siete segmentos. Usando esta técnica, optimizamos el uso de la memoria, ya que almacenamos cada código usando un solo byte. Este programa hace exactamente lo que el anterior, pero usando las instrucciones de lectura de tabla, pero en el 61 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos siguiente programa, veremos como usar instrucciones de lectura de tabla, para hacer un contador de 0 al 99. Ejemplo 8, manejando dos displays de siete segmentos Al tener dos displays, podemos incrementar el conteo hasta el 99, para esto usamos transistores como interruptores, para encender un solo display a la vez, ya que los segmentos están conectados en paralelo, es decir, el segmento a esta conectado con el a, el b con el b, y así sucesivamente, pero solo encenderá el display cuyo transistor está encendido, esta técnica se conoce como multiplexión, al encender y apagar los transistores a una frecuencia suficientemente alta (en el órden de los 10 KHz), apreciamos los dos displays como si siempre estuvieran encendidos. ;****************************************************************************** LIST P=18F4550 #include <P18F4550.INC> procesador ;directiva para definir el procesador ;definiciones de variables especificas del ;****************************************************************************** ;Bits de configuración ;CONFIG FOSC = INTOSC_XT ;Oscilador INT usado por el uC , XT usado por el USB CONFIG BOR = OFF ;BROWNOUT RESET DESHABILITADO CONFIG PWRT = ON ;PWR UP Timer habilitado CONFIG WDT = OFF ;Temporizador vigía apagado CONFIG MCLRE=OFF ;Reset apagado CONFIG PBADEN=OFF CONFIG LVP = OFF ;****************************************************************************** ;Definiciones de variables CBLOCK 0x000 ;ejemplo de definición de variables en RAM de acceso flags ;banderas iun ;índice de unidades cuni ;código de 7 segmentos de unidades idec ;índice de decenas cdec ;código de 7 segmentos de decenas cont ENDC ;fin del bloque de constantes ;****************************************************************************** ;Reset vector ORG 0x0000 bra inicio org 0x08 ;vector de alta prioridad bra RST0 ;ramifica servicio interrupción T0 org 0x18 ;vector de baja prioridad bra RSINT org 0x0020 inicio bsf OSCCON,IRCF2,0 bsf OSCCON,IRCF1,0 bcf OSCCON,IRCF0,0 ;Oscilador interno a 4 MHz movlw 0x0F movwf ADCON1,0 ;Puertos Digitales 62 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos clrf PORTD,0 63 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos clrf movlw movwf clrf movlw movwf movlw movwf bsf movlw movwf movlw movwf movlw movwf clrf movlw movwf clrf clrf lee clrf movff tblrd movff movff tblrd movff loop movlw movwf movff call movlw movwf movff call btfss bra bcf incf movf xorlw btfss bra TRISD,0 0xfc TRISC,0 PORTC,0 0x95 T0CON,0 0XE0 INTCON,0 RCON,IPE N,0 0xE1 TMR0H,0 0x7c TMR0L,0 0x88 INTCON3, 0 TBLPTRL, 0 0x02 TBLPTRH, 0 TBLPTRU, 0 iun,0 idec,0 iun,TBLPT RL * TABLAT,cu ni idec,TBLPT RL * TABLAT,cd ec 0x01 PORTC,0 cuni,PORT D retardo 0x02 PORTC,0 cdec,PORT D retardo flags,0,0 loop flags,0,0 iun,F,0 iun,W,0 0x0a STATUS,Z,0 lee ;Puerto D Configurado como salida ;RC0 y RC1 como salidas ;timer 16 bits prescalerX64 ;interrupciones TMR0,prioridad habilitada ;habilitamos prioridades de interrupción ;valor de precarga para 500ms a 4MHz ;habilitamos int1 en baja prioridad ;tblptr=0x000200 ;iniciamos en 0 ;ajusta apuntador ;lee la tabla sin modificar apuntador ;cuni tiene código 7 segmentos ;ajusta apuntador ;lee la tabla sin modificar apuntador ;cdec tiene código 7 segmentos ;encendemos display unidades ;encendemos display decenas ;verifica límite de tabla 64 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos clrf iun,0 incf idec,F,0 movf idec,W,0 xorlw 0x0a btfss STATUS,Z,0 bra lee clrf idec,0 goto lee ;****************************************************************************** retardo cont,0 65 setf Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos nad a nop decfsz cont,F, 0 bra nada return ;****************************************************************************** RST ;apagamos bandera bcf INTCON,TMR0I 0 timer0 movl F,0 0xE1 w movwf TMR0H,0 movl 0x7c ;valor de precarga para 500ms a TMR0L,0 w 4MHz movwf flags,0,0 bsf ;******************************************************************** retfie RSINT bcf INTCON3,INT1IF,0 ;Limpiamos bandera de interrupción flags,1, btg ;bit monitor de interrupción retfie 0 ;******************************************************************** 0x20 ;DB directiva que Define org 0 Byte DB 0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xB8,0x8 0,0x98 EN D Programa 8, controlando dos exhibidores de 7 segmentos Como observamos en el código del programa anterior, para controlar dos exhibidores, necesitamos dos bits de puerto configurados como salida, ya que ellos serán los encargados de encender y apagar los transistores que manejan los displays. En este programa, no se usa la instrucción TBLRD *+, ya que tenemos un par de registros en donde se guardan los índices necesarios para el conteo: Iun Idec índice de unidades índice de decenas El programa mantiene los índices dentro del valor adecuado, iun inicia en cero, y se incrementa exactamente cada 500 ms, hasta llegar a 9, una vez que iun tiene el valor de 9, en los siguientes 500 ms, iun se regresa a cero, pero a la vez se incrementa idec. Debido a que para encender los dígitos necesitamos los códigos de 7 segmentos, tenemos también dos registros que los almacenan Cuni código de 7 segmentos de unidades Cdec código de 7 segmentos de decenas El programa lo que hace es cargar el código de siete segmentos en el PORTD, el tiempo que dura la rutina retardo, cada 500ms se incrementa iun (y cuando regresa a cero, se incrementa idec) y se actualiza el código de siete segmentos con las instrucciones: movff iun,TBLPTRL unidades tblrd movff TABLAT,cuni ;ajusta apuntador con el valor de * ;lee la tabla sin modificar apuntador ;cuni tiene código 7 segmentos de unidades 66 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos movff idec,TBLPTRL ;ajusta apuntador con el valor de decenas ;lee la tabla sin modificar apuntador ;cdec tiene código 7 segmentos de decenas tblrd * movff TABLAT,cdec Ejemplo 9: Usando un teclado Matricial Hasta ahora solamente hemos trabajado básicamente con puertos configurados como salida, también hemos usado un bit de puerto configurado como entrada, para el contador ascendente descendente. Usaremos un teclado de 16 teclas, pero con la finalidad de optimizar puertos de entrada, trabajaremos con el teclado matricial, ya que con el solo necesitaremos un puerto de 8 bits, ya que está organizado en cuatro renglones y cuatro columnas. Esto se observa en la siguiente figura: U1 18 10k 10k 10k VUSB 10k 7 8 9 F 4 5 6 E 1 2 3 D 0 A B C 40 39 38 37 36 35 34 33 RB7/KBI3/PGD RB6/KBI2/PGC RB5/KBI1/PGM RB4/AN11/KBI0/CSSPP RB3/AN9/CCP2/VPO RB2/AN8/INT2/VMO RB1/AN10/INT1/SCK/SCL RB0/AN12/INT0/FLT0/SDI/SDA 13 14 7 6 5 4 3 2 1 RE3/MCLR/VPP 10 RE2/AN7/OESPP 9 RE1/AN6/CK2SPP 8 RE0/AN5/CK1SPP RD7/SPP7/P1D RD6/SPP6/P1C RD5/SPP5/P1B RD4/SPP4 RD3/SPP3 RD2/SPP2 RD1/SPP1 RD0/SPP0 OSC1/CLKI RA6/OSC2/CLKO RC7/RX/DT/SDO RA5/AN4/SS/LVDIN/C2OUT RC6/TX/CK RA4/T0CKI/C1OUT/RCV RC5/D+/VP RA3/AN3/VREF+ RC4/D-/VM RA2/AN2/VREF-/CVREF RC2/CCP1/P1A RA1/AN1 RC1/T1OSI/CCP2/UOE RA0/AN0 RC0/T1OSO/T1CKI 30 29 28 27 22 21 20 19 26 25 24 23 17 16 15 PIC18F4550 Se muestra en la siguiente figura, el diagrama de flujo para el funcionamiento del teclado 67 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Buy SmartDraw !- purchased copies print this document without a watermark . Visit www.smartdraw.com or call 1-800-768-3729. 68 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos Buy SmartDraw !- purchased copies print this document without a watermark . Visit www.smartdraw.com or call 1-800-768-3729. Como se puede observar en los diagramas de flujo, el barrido de teclado consiste en activar cada uno de los renglones, esto se hace limpiando solamente uno de los bits que controlan los renglones, y los otros tres bits restantes poniéndolos a uno. Una vez que se activa un renglón, se verifica cada una de las columnas para ver si existe un cero, esto nos dice que se pulsó una tecla y finaliza la rutina colocando en el registro de trabajo su código correspondiente; si en las columnas existe un nivel alto, es porque no se ha pulsado ninguna tecla, por lo que se desactiva el renglón correspondiente escribiendo un uno en su bit de puerto y activando el siguiente, escribiendo un cero en su bit de puerto. En la siguiente figura, mostramos el diagrama del teclado, nótese que se han omitido las resistencias que se conectan entre cada columna y el voltaje de alimentación, esto 69 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos es porque usamos las resistencias de pull up del microcontrolador, estas las activamos con la instrucción: U1 18 7 8 9 F 4 5 6 E 1 2 3 D 0 A B C VUSB RE3/MCLR/VPP RE2/AN7/OESPP RE1/AN6/CK2SPP RE0/AN5/CK1SPP 40 RB7/KBI3/PGD 39 RB6/KBI2/PGC 38 RB5/KBI1/PGM 37 RB4/AN11/KBI0/CSSPP 36 RB3/AN9/CCP2/VPO 35 RB2/AN8/INT2/VMO 34 RB1/AN10/INT1/SCK/SCL 33 RB0/AN12/INT0/FLT0/SDI/SDA 13 14 7 6 5 4 3 2 RD7/SPP7/P1D RD6/SPP6/P1C RD5/SPP5/P1B RD4/SPP4 RD3/SPP3 RD2/SPP2 RD1/SPP1 RD0/SPP0 OSC1/CLKI RA6/OSC2/CLKO RC7/RX/DT/SDO RA5/AN4/SS/LVDIN/C2OUT RC6/TX/CK RA4/T0CKI/C1OUT/RCV RC5/D+/VP RA3/AN3/VREF+ RC4/D-/VM RA2/AN2/VREF-/CVREF RC2/CCP1/P1A RA1/AN1 RC1/T1OSI/CCP2/UOE RA0/AN0 RC0/T1OSO/T1CKI 1 10 9 8 30 29 28 27 22 21 20 19 26 25 24 23 17 16 15 PIC18F4550 Se muestra a continuación el programa del teclado. La rutina KBD ejecuta el código correspondiente al diagrama de flujo anterior, entrega como resultado un código de 4 bits correspondiente a la tecla pulsada, si por alguna razón ninguna tecla se pulsó, regresa el código FF, aunque, debido a que activamos la interrupción por cambio de estado en la parte alta del puerto B, sabemos que si se activó la interrupción, es porque se pulsó una tecla. Incluimos el código nulo, para que la rutina KBD pueda ejecutarse también sin interrupción, es decir, invocar periódicamente esta rutina, para que cuando se pulse una tecla, se obtenga su código; este método es conocido como encuesta (polling). En la rutina de servicio de interrupción RSINT invocamos la rutina KBD, y si la tecla pulsada es menor que 0xA, entonces usamos este valor para modificar el dígito de decenas de nuestro contador, si se oprime la tecla C, limpia el contador, es decir, inicia en 00. ;****************************************************************************** LIST P=18F4550 ;directiva para definir el procesador #include ;definiciones de variables especificas del <P18F4550.INC> procesador ;****************************************************************************** ;Bits de configuración ;CONFIG FOSC = INTOSC_XT ;Oscilador INT usado por el uC , XT usado por el USB CONFIG BOR = OFF ;BROWNOUT RESET DESHABILITADO CONFIG PWRT = ON ;PWR UP Timer habilitado CONFIG WDT = OFF ;Temporizador vigía apagado CONFIG MCLRE=OFF ;Reset apagado CONFIG PBADEN=OFF CONFIG LVP = OFF ;****************************************************************************** 70 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos ;Definiciones de variables CBLOCK 0x000 ;ejemplo de definición de variables en RAM de acceso flags ;banderas iun ;índice de unidades cuni ;código de unidades idec ;índice de decenas cdec ;código de decenas cont tecla ;registro de código de tecla pulsada ENDC ;fin del bloque de constantes ;****************************************************************************** ;Reset vector ORG 0x0000 bra inicio org 0x08 ;vector de alta prioridad bra RST0 ;ramifica servicio interrupción T0 org 0x18 ;vector de baja prioridad bra RSINT org 0x0020 inicio bsf OSCCON,IRCF2,0 bsf OSCCON,IRCF1,0 bcf OSCCON,IRCF0,0 ;Oscilador interno a 4 MHz movlw 0x0F movwf ADCON1,0 ;Puertos Digitales clrf PORTB,0 movlw 0xf0 movwf TRISB,0 ;Configurar puerto para teclado clrf PORTD,0 clrf TRISD,0 ;Puerto D Configurado como salida movlw 0xfc movwf TRISC,0 ;RC0 y RC1 como salidas clrf PORTC,0 movlw 0x95 movwf T0CON,0 ;timer 16 bits prescalerX64 movlw 0XE8 movwf INTCON,0 ;interrupciones TMR0,RBIE prioridad alta y baja bsf RCON,IPEN,0 ;habilitamos prioridades de interrupción movlw 0xE1 movwf TMR0H,0 movlw 0x7c movwf TMR0L,0 ;valor de precarga para 500ms a 4MHz movlw 0x04 movwf INTCON2,0 ; int RBI en baja prioridad y activamos R pull up clrf TBLPTRL,0 movlw 0x02 movwf TBLPTRH,0 clrf TBLPTRU,0 ;tblptr=0x000200 clrf iun,0 clrf idec,0 ;iniciamos en 0 lee movff iun,TBLPTRL tblrd * ;lee movff TABLAT,cuni ;cuni tiene codigo 7 segmentos movff idec,TBLPTRL 71 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos tblrd movff * ;lee TABLAT,cd ;cdec tiene codigo 7 segmentos ec loop movlw 0x01 movwf PORTC,0 ; encendemos display unidades movff cuni,PORTD call retardo movlw 0x02 movwf PORTC,0 ;encendemos display decenas movff cdec,PORTD call retardo btfss flags,0,0 bra loop bcf flags,0,0 incf iun,F,0 movf iun,W,0 xorlw 0x0a btfss STATUS,Z,0 bra lee clrf iun,0 incf idec,F,0 movf idec,W,0 xorlw 0x0a btfss STATUS,Z,0 bra lee clrf idec,0 goto lee ;******************** ************* ********************************************* retardo setf cont,0 nada nop decfsz cont,F,0 bra nada return ;****************************************************************************** RST0 bcf INTCON,TMR0IF,0 ;apagamos bandera timer0 movlw 0xE1 movwf TMR0H,0 movlw 0x7c ;valor de precarga para 500ms a 4MHz movwf TMR0L,0 bsf flags,0,0 retfie ;******************** ************* *********************************** RSINT call KBD ;Llamamos rutina del teclado bcf INTCON,RBI ;LIMPIAMOS BANDERA F,0 movwf tecla,0 ;guardamos tecla pulsada movlw 0x0a cpfslt tecla,0 ;salta si es que se pulso una tecla entre 0 y 9 bra limpia movff tecla,idec ;carga número de tecla pulsada en decenas movff idec,TBLPTR L tblrd * ;lee movff TABLAT,cde ;cdec tiene código 7 segmentos 72 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos limpia c bra exit movlw 0x0c 73 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos cpfseq tecla,0 bra exit clrf iun,0 ;limpiamos índice de unidades clrf idec,0 ;limpiamos índice de decenas movff idec,TBLPTRL tblrd * ;lee movff TABLAT,cdec ;cdec tiene código 7 segmentos movff iun,TBLPTRL tblrd * ;lee movff TABLAT,cuni ;cdec tiene código 7 segmentos exit clrf PORTB,0 retfie ;******************************************************************** KBD movlw 0x0e movw PORTB,0 f PORTB,4,0 btfss retlw 0x00 btfss PORTB,5,0 retlw 0x0A btfss PORTB,6,0 retlw 0x0B btfss PORTB,7,0 retlw 0x0C movlw 0x0D movw PORTB,0 f btfss PORTB,4,0 retlw 0x01 btfss PORTB,5,0 retlw 0x02 btfss PORTB,6,0 retlw 0x03 btfss PORTB,7,0 retlw 0x0D movlw 0x0B movw PORTB,0 f btfss PORTB,4,0 retlw 0x04 btfss PORTB,5,0 retlw 0x05 btfss PORTB,6,0 retlw 0x06 btfss PORTB,7,0 retlw 0x0E movlw 0x07 movw PORTB,0 f btfss PORTB,4,0 retlw 0x07 btfss PORTB,5,0 retlw 0x08 btfss PORTB,6,0 ;activamos primer renglón ;tecla 0 ;tecla a ;tecla b ;tecla c ;activamos segundo renglón ;tecla 1 ;tecla 2 ;tecla 3 ;tecla d ;activamos tercer renglón ;tecla 4 ;tecla 5 ;tecla 6 ;activamos primer renglón ;tecla 7 ;tecla 8 74 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos retlw btfss retlw 0x09 PORTB,7,0 0x0F ;tecla 9 ;tecla F 75 Ricardo Álvarez González Microcontroladores PIC 18F4550 Ejemplos prácticos retlw org DB END 0xFF ;ninguna tecla pulsada 0x20 ;DB directiva que Define 0 Byte 0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xB8,0x8 0,0x98 Programa 9, Contador de 0-99, con programación de decenas y borrado con un teclado matricial Ejercicios 9.1 Modifique la rutina RSINT, para que al pulsar la tecla A, el conteo sea ascendente y al pulsar la tecla D, el conteo sea descendente. Ejemplo 10: Usando el timer 2 En los programas anteriores, usamos nuevamente nuestra rutina básica de retardo, la cual funciona por el tiempo de ejecución de instrucciones. Pero ahora, modificaremos esta rutina, usando el timer 2. Como podemos ver en su diagrama de bloques, el timer 2 tiene las siguientes características únicas, con respecto a los otros timers existentes en este microcontrolador: Solamente puede funcionar como timer Cuenta además del pre divisor, con post divisor Su funcionamiento no está basado en su desbordamiento, sino que cuenta con un registro de periodo en donde se coloca su valor de precarga, y mediante un comparador detecta cuando el timer alcanza y coincide con ese valor 76