")
FACULTAD DE INGENIERÍA - SISTEMAS AUTOMÁTICOS DE CONTROL-01
CÓDIGO: 710071M
Grupo: 01 - Franja de Asignatura: 01
CONTROL DE FRECUENCIA DE UN
ALTERNADOR
1st Alejandro Camacho, 2st Eduardo Guateque y 3st Farik Solarte
Códigos: 1st 1746675-3746, 2st 1741531-3746 y 3st 1723131-3746
Grupo: 01 - Franja de Asignatura: 01
Universidad del Valle
Santiago de Cali, Colombia
camacho.alejandro@correounivalle.edu.co
jose.guateque@correounivalle.edu.co
farik.solarte@correounivalle.edu.co
Abstract. The main objective of this report is to realize a control
system that allows the correct adjustment of frequency
corresponding to a synchronous generator of the "Salvajina"
hydroelectric power plant. For it the system of hydric generation is
described, with its respective technical information, it is raised like a
proposal for the frequency control of a typical loop, with the
purpose of generating an optimal control to this system and the
costs and benefits that it brings are shown.
Palabras
cables:
Electromagnética.
I.
Alternador,
Turbinas,
Inducción
INTRODUCCIÓN
Para garantizar el correcto funcionamiento de los dispositivos
eléctricos, la energía suministrada por una central eléctrica
debe generarse con una magnitud y frecuencia fija, ya que la
mayoría de máquinas y dispositivos eléctricos están diseñados
para funcionar en base a un voltaje y frecuencia ya
establecidos, un cambio brusco en estas magnitudes podría
generar un funcionamiento incorrecto o no deseado e incluso
podría llegar a damnificar el dispositivo.
Un ejemplo de esta situación se presenta en el funcionamiento
de los motores que se usan en la industria, los cuales fueron
diseñados para que trabajen a una velocidad de giro que está
estrechamente relacionada con la frecuencia que se utilice para
alimentarlo, por ende se puede comprender como controlar
estos parámetros es una necesidad básica para la generación de
energía eléctrica.
Para conseguir dicho control se toman los voltajes y
frecuencias fijas como una referencia, para así manipular el
sistema de forma que esos valores se mantengan fijos, por ende
se puede denominar dicho proceso como un sistema de
regulación.
II.
MARCO TEÓRICO
El alternador o generador sincrónico es un dispositivo
electromecánico encargado de convertir la energía mecánica
proveniente de fuentes de energía primaria como lo son por
combustión de carbón, petróleo, gas natural o la energía
potencial y cinética de un río o un embalse creado por una
represa, los cuales tienen como finalidad producir el calor
necesario para obtener vapor a presión y en caso de los ríos y
represas usar el agua para generar la presión necesaria para
brindarle energía mecánica al rotor.
Este es un elemento que gira dentro del estator teniendo las
propiedades intrínsecas de un imán o un electroimán y un
estator conformado por varias bobinas, presentándose como un
elemento estático dentro del alternador, de esta manera, en el
momento que el rotor empieza a girar, este creará un campo
magnético en movimiento, induciendo un voltaje en las
bobinas del estator, permitiendo de este modo, si el circuito se
encuentra en un estado cerrado funcional, generar una
corriente alterna en las mismas.
El alternador es un generador el cual la frecuencia de la
electricidad de salida es dependiente linealmente de la
velocidad de giro del rotor, por otra parte es sumamente
FACULTAD DE INGENIERÍA - SISTEMAS AUTOMÁTICOS DE CONTROL-01
CÓDIGO: 710071M
Grupo: 01 - Franja de Asignatura: 01
importante tener en cuenta la forma de su construcción, lo cual
implica el número de polos que tenga el rotor y la capacidad de
fricciones generadas.
El voltaje inducido en las bobinas del estator depende de la
construcción de la máquina, de la velocidad a la que gire el
rotor y del flujo de la máquina, esto genera relaciones lineales
ya que el flujo a su vez depende de la corriente de campo.
del fluido que pasa a través de ellas, y las de reacción que sí la
afectan, algunas de las comúnmente usadas son:
●
●
●
Kaplan.
Pelton.
Francis.
Se escoge el tipo de turbina dependiendo de las condiciones de
generación, como el caudal de agua, y su diferencia de nivel
entre entrada y salida del canal.
B. Características del Alternador de la central
hidroeléctrica “SALVAJINA”.
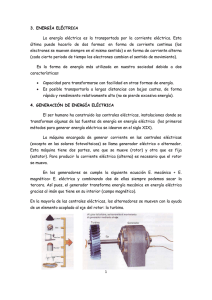
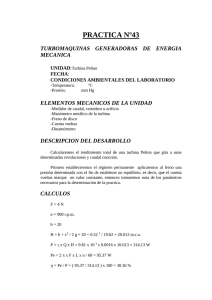
Figura 1. Despiece de alternador eléctrico. [1].
A. Centrales hidroeléctricas.
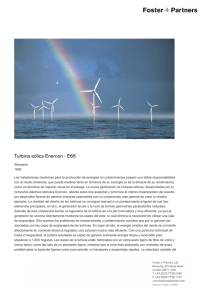
En las centrales hidroeléctricas el movimiento del rotor se debe
al flujo de un caudal de agua, este permite el girar una turbina
que está en el extremo exterior del rotor como se muestra en la
Figura 2., una vez el rotor gira se induce un voltaje en las
bobinas del estator que produce una corriente eléctrica, el
voltaje generado es elevado a cientos de miles de volts por
medio de transformadores permitiendo de esta manera su
posterior transmisión.
Las turbinas hidráulicas de “Salvajina” son a cielo abierto con
tres grupos tipo Francis vertical, por tanto son turbinas de
reacción, tienen una capacidad instalada de 285 MW y
producen una energía media/anual 1050 GWh [3].
C. Control Sistema Real Similar: Motor AC
El sistema de la dinámica de un generador y un motor son
exactamente los mismos, lo cuales se rigen por el principio de
las leyes mecánicas y electromagnéticas.
A groso modo los generadores funcionan porque el
movimiento generado por la turbina hace que un electroimán
conectado al eje ( Rotor) gire entre un bobinado ( Estator) ,
generando así que los campos electromagnéticos varíen entre
ellos y generen un voltaje inducido en AC.
Por otro lado los motores eléctricos lo que usan es la misma
ley pero en sentido contrario; hacen que una corriente eléctrica
que circula por los bobinados del rotor existen los polos de los
electroimanes del rotor y así con esa variación de la cargas y
los campos magnéticos se genere el torque, utilizando ya la
fuerza mecánica que puede brindar este, la manera de controlar
el Motor en AC básicamente es la misma de un generador,
controlandola por la variación de la frecuencia de operación,
modificando así su velocidad de giro.
Figura 2. E
squema básico de una central hidroeléctrica. [2].
Existen distintos tipos de turbinas hidráulicas, se clasifican en
dos tipos las de acción, que son las que no afectan la presión
A continuación hablaremos más en detalle de las ecuaciones
que competen estos 2 sistemas que son muy similares por no
decir el mismo, ya que la función por la que se crean difiere
pero el principio es el mismo.
FACULTAD DE INGENIERÍA - SISTEMAS AUTOMÁTICOS DE CONTROL-01
CÓDIGO: 710071M
Grupo: 01 - Franja de Asignatura: 01
III.
DESARROLLO DEL TEMA
La necesidad de controlar los parámetros de frecuencia y
tensión en la salida del generador sincrónico se debe a que hay
que garantizar un funcionamiento de suministro de energía
eléctrica a los usuarios de manera fija, teniendo las magnitudes
de la frecuencia y voltaje de manera constante, esto se debe a
que en las industrias, muchos motores y equipos están
diseñados para operar a una frecuencia de red eléctrica
definida, siendo así indispensable que su velocidad de giro se
mantenga estable para hacer sus procesos industriales de
manera deseada, del caso contrario, existe la alta posibilidad de
averiar estos equipos o que no cumplan el funcionamiento
óptimo para su proceso.
Debido a esto, controlar estos parámetros en los generadores
síncronos de las centrales hidroeléctricas son una necesidad
para el usuario y un deber para el operador que suministre esta
energía. Para realizar el control se toman los voltajes y
frecuencias fijas como referencia luego se manipula el sistema
para que se mantengan estables estos valores de los
parámetros, aquí hablamos de un sistema de regulación
entonces. A continuación se muestran las buclas típicas para
lograr este objetivo.
D. Controlador de frecuencia.
Ya que se desea controlar la frecuencia de la electricidad de
salida del generador, y esta es directamente proporcional a la
velocidad con la que gira la turbina, se tomará la velocidad de
giro de la turbina como la variable a controlar.
La velocidad de giro de la turbina depende del caudal que agua
que pase por el canal y de cómo interactúa este con los álabes
de la turbina, de manera que para controlar el giro se necesita
controlar el caudal y los álabes, esto se hace por medio de
servomotores que accionan válvulas para el paso de agua y en
algunos casos producen movimiento en los álabes.
Figura 3. Bucla típica de control de la frecuencia.
E. Controlador de tensión.
El voltaje inducido en un alternador sincrónico depende de la
construcción del generador, de la velocidad a la que gire el
rotor y del flujo de campo, ya que la velocidad es fija debido a
que debemos también mantener una frecuencia constante, y su
construcción está definida, la variable que tenemos que
manipular para controlar el voltaje es el flujo de campo que a
su vez depende de la corriente de campo.
Para el caso del generador de la hidroeléctrica “Salvajina” su
sistema de excitación es de auto excitado. Se toma la salida de
su generador y se rectifica para controlar el campo del
generador.
Los elementos principales de la bucla típica se listan a
continuación.
●
●
●
●
Entrada: Voltaje de referencia.
Salida: Voltaje en terminales estator.
Perturbación: Carga (Corriente armadura).
Planta: Generador.
Los elementos principales de la bucla son los siguientes.
●
●
●
●
Entrada: Velocidad de referencia.
Salida: Velocidad de la turbina.
Perturbación: Turbina.
Planta: Servomotores y generador.
Figura 4. Bucla típica de control de la frecuencia.
FACULTAD DE INGENIERÍA - SISTEMAS AUTOMÁTICOS DE CONTROL-01
CÓDIGO: 710071M
Grupo: 01 - Franja de Asignatura: 01
F. Modelos Mátematicos.
1.
central hidroeléctrica y a partir del cual se plantearon las
adecuaciones.
Sistema de control de la frecuencia
El sistema de control para la frecuencia se muestra en la
Figura 5. Al controlador llega una señal de tensión (Vref) que
representa la velocidad de referencia, esta señal se compara
con la velocidad medida por el sensor que también se traduce
en un voltaje, esta diferencia se procesa y envía una señal a los
actuadores (a(k)) la cual es convertida a análoga y enviada a
los actuadores, estos amplifican la señal que actúa sobre los
servomotores (a(s)) que abren y cierran las puertas controlando
el flujo de agua.
Este flujo de agua produce una potencia mecánica (Pm) sobre
la turbina que se traduce en un torque (Tm). En sentido
contrario también se produce un torque electromagnético (Te)
que depende de la carga que se conecte a los terminales del
estator, pidiendo una potencia (Pe), esta potencia corresponde
al disturbio. La potencia neta genera un torque neto que
produce una velocidad angular en el rotor (w).
La velocidad angular del rotor se relaciona con la frecuencia
de la energía eléctrica de salida mediante la siguiente ecuación:
U=
120*f
n
Figura 6. Esquema de una planta hidroeléctrica, Power
System Stability Control, KUNDUR [4]
2.
Para obtener un modelo de la turbina se tomaron las siguientes
consideraciones:
●
La resistencia hidráulica es despreciable.
●
El agua es incompresible y la puerta es inelástica.
●
La potencia mecánica sobre la turbina es proporcional
al producto de la cabeza de agua con el volumen de
flujo.
●
La velocidad del agua varía con la apertura de la
puerta y la raíz cuadrada de la cabeza de agua total.
Entonces, la velocidad del agua es:
(1)
Donde:
Turbina.
U: Velocidad angular del rotor.
f: Frecuencia eléctrica.
n: número de polos.
El 120 es debido a que es un generador trifásico.
(2)
U = K uG * H
Donde:
U : Velocidad del agua.
K u : Constante de proporcionalidad.
G : Apertura de la puerta.
H : Cabeza de agua en la puerta.
Figura 5. Bucla típica de control (cualitativa).
Para obtener el modelo matemático del sistema se modeló cada
elemento por separado, obteniendo para cada uno su función
de transferencia. En la Figura 6. se muestra el esquema de una
Obteniendo la expresión para cambios pequeños de velocidad:
ΔU =
∂U
∂H
ΔH +
∂U
∂G
ΔG
(3)
Al reemplazar las derivadas parciales y normalizar dividiendo
por U = K u G0 * H 0 obtenemos:
FACULTAD DE INGENIERÍA - SISTEMAS AUTOMÁTICOS DE CONTROL-01
CÓDIGO: 710071M
Grupo: 01 - Franja de Asignatura: 01
ΔU =
1
2
(4)
ΔH + ΔG
Luego en (10) reemplazando de (7) obtenemos la función de
transferencia de la turbina:
Ya que necesitamos tener la función de transferencia de la
turbina con entrada ΔG y salida ΔP m , necesitamos relacionar
la potencia. Siguiendo las consideraciones del inicio.
(5)
ΔP m = K p * H * U
Entonces para cambios en la potencia:
(6)
ΔP m = ΔH + ΔU
Remplazando ΔH de la ecuación (4) obtenemos:
(7)
ΔP m = 3ΔU − 2ΔG
Ahora necesitamos relacionar la velocidad del agua
directamente con la altura G, para obtener la expresión (6) sólo
en términos de Pm y G. Para ello usamos la segunda ley del
movimiento de Newton, que nos dice:
ρLA
dΔU
dt
(8)
=− A(ρag ) ΔH
ΔP m
ΔG
3.
=
1−T w s
1+ 21T w s
Generador.
El generador se acelera debido al torque producido por el agua
que llega a la turbina, sin embargo existe un torque en sentido
contrario debido a la cantidad de potencia eléctrica que se le
pide al estator, este torque electromagnético es considerado
como el disturbio.
La ecuación que relaciona estos torques con la velocidad
angular es la siguiente:
J
dΔwr
dt
= Tm − Te
T base =
1
wbase
Tw =
LU 0
ag H 0
dΔW r
dt
(9)
Donde T w es una constante de tiempo que hace referencia a lo
que tarda el agua en acelerar de 0 a una velocidad U 0 desde
una cabeza de agua G0 .
Reemplazando ΔH de (4) en (9), y aplicando la transformada
de Laplace obtenemos:
ΔU =
1
1+ 21T w s
ΔG
(13)
=
P base
T base W base
(14)
Se multiplica la ecuación (12) por la (14) para obtener los
valores normalizados del torque y velocidad:
Normalizando, dividiendo la expresión por, Aρag H 0 U 0
obtenemos:
= − ΔH ,
P base
W base
Obtenemos que:
L : Largo del conducto
A : Área del tubo
ρ : Densidad del agua
ag : Aceleración debido a la gravedad
ρLA : Masa de agua dentro del conducto
dΔU
dt
(12)
En la ecuación (3), se encuentra T base y P base
correspondiente al torque y la potencia para una velocidad
angular de referencia W base :
Donde:
Tw
(11)
(10)
=
1
2H (T m
H=
− T e)
2
1
2 JW base
P base
(15)
(16)
La turbina se expresa como una salida de potencia mecánica,
para una correcta interpretación se debe expresar la ecuación
en términos de potencia y velocidad angular, ya que la
potencia mecánica es más fácil de medir que el torque
mecánico.
P = wr T
(17)
FACULTAD DE INGENIERÍA - SISTEMAS AUTOMÁTICOS DE CONTROL-01
CÓDIGO: 710071M
Grupo: 01 - Franja de Asignatura: 01
W r(S)
ΔP m −ΔP l
Donde:
=
1
T M s+D
P =Potencia
T :Torque
wr : Velocidad angular
T M corresponde al tiempo del servomotor principal.
Para variaciones de potencia tendremos:
Servomotores de las compuertas:
T M = 2H
(18)
ΔP = (w0 + Δwr )(T 0 + ΔT )
(19)
Para el eje se tiene que:
Cuando se encuentre en régimen permanente, es decir en el
momento que la velocidad este estable T m = ΔT e0 , además
como anteriormente se normalizo w0 = 1, la ecuación anterior
queda:
ΔP m − ΔP e = ΔT m − ΔT e
(20)
Así que:
dΔW r
dt
=
1
2H (ΔP m
− ΔP e )
ΔG
a(s)
=
Ks
1+T g S
(24)
T g está en unidades de tiempo y hace referencia a la constante
de tiempo del servomotor.
4.
ΔP m − ΔP e = (T m0 − ΔT e0 )(ΔW r + (w0 )(ΔT m − ΔT e )
(23)
Los servomotores que activan las compuertas se describen con
la siguiente función de transferencia:
Resolviendo las operaciones, despreciando los términos de
segundo orden, y tomando solo los incrementos obtenemos:
ΔP = (T 0 ΔW r) + (w0 ΔT )
(22)
Sensor.
Como sensor se usa un encoder, este elemento da una serie de
pulsos con una frecuencia determinada por la velocidad
angular que mida, esta frecuencia es obtenida y representada
por un nivel de voltaje usando un microcontrolador. Por tanto
el sensor al ser un nivel de voltaje se representó mediante una
ganancia K.
La bucla típica con las ecuaciones matemáticas antes halladas
se muestra en la siguiente figura:
(21)
La variación de potencia dada, se describe según la siguiente
ecuación:
ΔP e = ΔP l + Dwr
(22)
Donde ΔP l corresponde al incremento en la potencia y D
corresponde a la relación que existe entre la variación de la
frecuencia con variaciones de la potencia.
Remplazando (22) en (21) se obtiene:
dΔW r
dt
=
1
2H (ΔP m
− ΔP t − Dw r)
(21)
Aplicando laplace y encontrando la función de transferencia:
Figura 7. Bucla típica sin controlador (ecuaciones)..
G. Estados de control.
A partir de la bucla definida anteriormente se definieron unos
parametros tipicos de un sistema de este tipo tomando como
referencia los valores dados por el libro “Power System
Stability and Control” escrito por PraBha Kundur [5] de la
siguiente manera:
FACULTAD DE INGENIERÍA - SISTEMAS AUTOMÁTICOS DE CONTROL-01
CÓDIGO: 710071M
Grupo: 01 - Franja de Asignatura: 01
−1
G s = E sl − A B + D
G s=
2
−1.6667 S −0.5
2
S + 2.76667*S +1.9333*S+0.16667
−0.1 S + 2.6667*S+1.6667
2
S + 2.76667*S +1.9333*S+0.16667
3
Tabla 1. Datos típicos para plantas y actuadores. [5].
3
*
[ ]
R(s)
D(s)
A continuación, para su transformación se dividió en
fracciones parciales el bloque de la turbina y se aplicó la
transformada inversa teniendo en cuenta que
Después de eso se separó el bloque de la turbina en dos
bloques diferentes para evitar derivadas en la entrada y
posteriormente definir las variables de estados.
−1
F DT P = 1 − Z
* transf ormada Z{
Gs
}
s
Así G(s)/s en fracciones parciales es:
Para el primer término de la matriz 1x2 :
A11 =
−7.09235
S+0.100005
+
4.16635
S+0.999933
−
2.074
S+1.66673
+
5
S
Para el segundo término de la matriz de 1x2:
A12 =
Figura 8. Definición de variables de estado.
Se definieron las ecuaciones para los estados planteados en el
diagrama anterior, como se muestra a continuación:
z (A11 ) =
z (A12 ) =
3 * x1 = x2 + x2′
Luego se despejó la derivada de cada estado y se planteó la
ecuación matricial de estados como se muestra a continuación:
x1′ =
−
x2′ =
3 −1
0
0
x1
0 * x2 + 0
x3′ = − 0.2 0.1 − 0.1
x3
0
+
−6
1.22181×10
S+1.66673
−
1
S
−7.09235*Z
Z−e−0.1T
1.00001★Z
Z−e−0.1T
−
+
4.16635★Z
Z−e−T
−6
7.40745★10 ×Z
Z−e−T
−
+
2.074★Z
Z−e−1.67T
5★Z
Z−1
+
−6
1.22181×10 ×Z
Z−e−1.67T
−
Z
Z−1
Multiplicando por el retenedor de orden cero:
2 * x1 + x2 − Dist = x3 + 10 * x3′
5
0.6
−6
7.4075×10 .
S+0.999933
−
Luego se transformó a Z y se adiciono la parte del retenedor de
orden cero en dominio discreto con periodo T:
5 * ln = x1 + 0.5 * x1′
1
0.6
1.00001
S+0.100005
0
In
0*
Dist
0.1
H. Función de transferencias de pulso
A partir del diagrama de bloques planteado inicialmente se
procedió a calcular la matriz de transferencia de todo el
sistema.
F DRP = 1 − Z
I.
−1
* [Z (A11 ) Z(A12 )] *
[ InD ]
Análisis del modelo.
Teniendo en cuenta el modelo matemático planteado
anteriormente se utilizó la herramienta de Simulink de Matlab
para adquirir una respuesta a un escalón. Primero se realizó la
simulación para un escalón sin disturbio y luego se añadió el
disturbio para comparar la interacción de este con el sistema.
Para la respuesta ante un escalón sin disturbio se tiene:
FACULTAD DE INGENIERÍA - SISTEMAS AUTOMÁTICOS DE CONTROL-01
CÓDIGO: 710071M
Grupo: 01 - Franja de Asignatura: 01
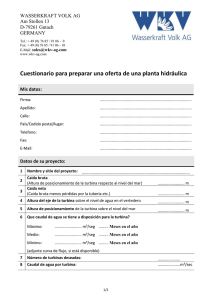
Figura 9. Respuesta de la frecuencia angular (eje y) en el
tiempo (eje x) ante un escalón, sin disturbio.
Los valores negativos de velocidad angular en la curva son
causados porque cuando la compuerta se abre rápidamente el
flujo de agua no cambia inmediatamente debido a la inercia del
agua, en cambio, la presión en la tubería de la turbina es
reducida causando que la potencia mecánica se reduzca, lo que
se traduce en una frecuencia “negativa” o en sentido contrario
a la referencia.
Luego de que el agua alcanza un flujo estable la potencia
comienza a aumentar hasta que alcanza el nuevo valor de
estabilización por lo que también se estabiliza la frecuencia.
Luego para la simulación a un escalón en el disturbio se tiene
la siguiente respuesta:
Figura 11. Respuesta de la frecuencia angular (amarillo) en el
tiempo ante un escalón (azul) con disturbio (morado).
La Figura 9. Corresponde a la respuesta de la salida ante un
escalón en el disturbio, este por ser de naturaleza negativa en
el diagrama de bloques genera este fenómeno de sistema de
primer orden negativo, pero, cabe resaltar que en la realidad el
comportamiento del sistema no es así ya que el disturbio se da
cuando la turbina ya esté girando y depende de la potencia
requerida por la carga, es decir de la salida.
La naturaleza de la gráfica de la Figura 10 se puede entender
debido a que el disturbio corresponde al torque
electromagnético generado por la inducción entre las bobinas
del estator este no es de naturaleza constante, por lo que
aumenta en tanto aumente la potencia eléctrica del generador,
dada por el requerimiento de la carga. lo cual significa que, en
la práctica, el disturbio no haría efecto si la turbina no está
girando. Por lo tanto, en la Figura 10 se simula cómo se
comporta el disturbio (un escalón) una vez que el sistema se ha
estabilizado sin carga.
Además podemos observar que ya que no hay controlador, no
existe una compensación del error, y por tanto la velocidad
angular alcanzada no es la de la señal de referencia.
Figura 10. Respuesta de la frecuencia angular (eje y) en el
tiempo (eje x) ante un escalón en el disturbio.
Para este modelo se considera que la zona muerta corresponde
a la zona de voltaje a la cual el servomotor no está lo
suficientemente excitado para ser movido, esta zona depende
estrictamente de las características del motor y para la
simulación no se tuvo en cuenta porque la simulación
corresponde a un modelo teórico.
FACULTAD DE INGENIERÍA - SISTEMAS AUTOMÁTICOS DE CONTROL-01
CÓDIGO: 710071M
Grupo: 01 - Franja de Asignatura: 01
IV. CONCLUSIONES
●
Este modelo es aplicable a un sistema que no tenga
grandes cambios en cuanto a la referencia, pues para
obtener el modelo de orden tres, fue necesario
despreciar varios fenómenos, especialmente en el
modelo matemático de la turbina, que implican
variaciones pequeñas en el punto de operación dado.
●
Ya que el disturbio no es constante, y corresponde a
la magnitud de carga acoplada al generador, debe ser
medido con un sensor de alta frecuencia para que se
logren corregir los pequeños cambios en la salida de
forma casi instantánea.
●
Debido a la naturaleza del sistema se puede decir que
es imposible que un operario sea el encargado de
realizar el control manual de las compuertas de la
planta puesto que es un sistema muy variante que
debe estar en funcionamiento las 24 horas.
V.
REFERENCIAS
[1] Caicedo, G., Ramirez, J. M., Saavedra, A. J., &
Vasquez, H. (2011). Modelos matemáticos para los
reguladores de velocidad y los sistemas de
excitación de la planta Salvajina.
[2] Caicedo, G., & Murcia Polo, F. (2011). Obtención
de parámetros de los reguladores de velocidad de
turbinas hidráulicas.
[3] https://sites.google.com/site/046tecnologia/turbinagenerador
[4] https://jpfisicaecci2013.wordpress.com/tercer-cort
e/energia-y-sus-tipos/energia-mecanica/energia-hid
raulica/
[5] EPSA,Salvajina,
http://portal.epsa.com.co/nosotros/presenciageogr
%C3%A1fica/salvajina
[6] KUNDUR, P. S. Power system stability and
control. United States : Mc Graw Hill, 1994. 1176.