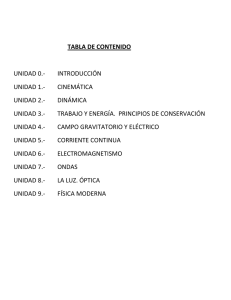
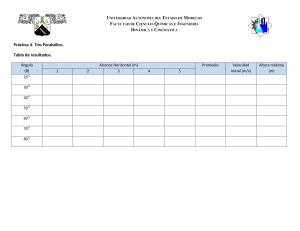
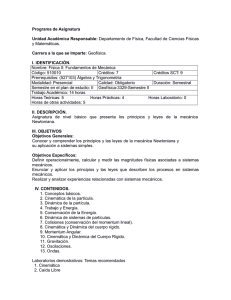
1 Muñeca esférica y cinemática inversa A. Calderón, R. Velástegui agcalderon@espe.edu.ec, rjvelastegui@espe.edu.ec Universidad de las Fuerzas Armadas – ESPE Resumen - Este documento tiene por objetivo resumir los capítulos 5.4, 6.2, 6.3 y 6.4 del libro “Theory of Applied Robotics” con la finalidad de comprender de mejor manera temas como lo son “Muñeca esférica”, “Técnica de transformación inversa”, “Técnica iterativa” y “Comparación de las técnicas de la cinemática inversa”. Aclarando subtemas tales como “Existencia y singularidad de una solución” y “Técnicas de cinemática inversa”. Ilustración 1. Representación de una muñeca esférica. Índice de Términos - Muñeca esférica, roll, pitch, yaw, cinemática directa, cinemática inversa. Donde su matriz de transformación desde el antebrazo hasta la pinza es: I. T INTRODUCCIÓN eniendo las variables conjuntas de un robot, podemos determinar la posición y la orientación de cada eslabón del robot, para un conjunto dado de geometrías características del robot. Adjuntamos un marco de coordenadas a cada eslabón y determinar su configuración. Este análisis se llama cinemática directa. La determinación de las variables conjuntas se reduce a resolver un conjunto de ecuaciones algebraicas acopladas no lineales. Aunque no existe un método estándar y de aplicación general para resolver el problema cinemático inverso, existen algunos métodos analíticos y numéricos para resolver el problema. La principal dificultad de la cinemática inversa es la múltiple de soluciones. Para clasificarlas descompondremos en tres las rotaciones alrededor de los 3 ejes ortogonales, siendo estas: Roll: Cualquier rotación que hace girar la pinza alrededor de su eje cuando la muñeca está en la posición de reposo. Pitch y Yaw: Son perpendiculares al eje de la pared de la pinza, y se definen en la posición de reposo. II. CINEMÁTICA DIRECTA E INVERSA A. Muñeca esférica La muñeca esférica se caracteriza por estar formada por 3 enlace tipo R-R, con ejes de la articulación mutuamente ortogonales, mismos que se intersecan en un punto llamado punto de muñeca (wrist point). Al final de ésta hay una herramienta que por lo usual es una pinza, donde se le proporciona tres rotaciones DOF para el enlace de la pinza. Y su representación es: Ilustración 2. Tipos de rotaciones. Hay tres tipos de muñecas esféricas: 2 Tabla 1. Tipos de muñecas esféricas. Roll, pitch, roll o muñeca eureliana Roll, pitch, yaw Pitch, yaw, roll Esta ecuación aparece con frecuencia en la cinemática inversa: Donde la solución es: B. Técnicas de transformación inversa Donde la respuesta con signo (-) corresponde a la configuración de hombro izquierdo y el signo (+) corresponde a la configuración del hombro derecho. Con este podemos encontrar los demás ángulos: Recordar que en cinemática inversa existen múltiples soluciones para llegar a la posición del efector final. Supongamos que tenemos la matriz de transformación indicando la posición global y la orientación del efector final de un 6 DOF en la base. C. Técnica iterativa El problema de cinemática inversa se puede interpretar como una búsqueda de la solución qk de un conjunto de ecuaciones algebraicas no lineales. Ilustración 3. Robot esférico (manipulador esférico unido a una muñeca esférica). Se puede resolver el problema resolviendo las siguientes ecuaciones: Hay numerosos métodos disponibles para encontrar los ceros de la ecuación. Sin embargo, los métodos son, en general, iterativo. El método más común se conoce como Método de Newton-Raphson. La repetición de los métodos se puede resumir en la 3 siguiente ecuación iterativa para converger al valor exacto de las variables: configuración particular. La multiplicidad de la solución depende del número de articulaciones del manipulador y su tipo. Las funciones T(q) son trascendentales, que se dan explícitamente sobre la base del análisis cinemático directo. REFERENCES Esta técnica de iteración se puede configurar en un algoritmo para facilitar los cálculos numéricos, así: 1) Establecer el contador inicial i = 0. 2) Encontrar una estimación inicial q(0). 3) Calcular el residuo . 4) Calcular 5) Colocar i = i + 1 y retornar al paso 3. D. Comparación de las técnicas de cinemática inversa En general, cuando existe la solución de la cinemática inversa de un robot, no son únicas. Aparecen múltiples soluciones porque un robot puede llegar a un punto dentro del espacio de trabajo en diferentes configuraciones. Usted tendrá mayor control sobre la apariencia de sus figuras si usted puede preparar los archivos electrónicos de imagen. Si usted no tiene las habilidades de computación requeridas, sólo envíe las impresiones de papel como se describió anteriormente y salte esta sección. El hecho de que un manipulador tenga múltiples soluciones puede generar problemas ya que el sistema tiene que poder seleccionar una de ellas. Los criterios en los que basar una decisión pueden variar, pero una opción muy razonable consiste en elegir la solución más cercana a la configuración actual. Cuando el número de uniones excede de seis, la estructura se vuelve redundante y existe un número infinito de soluciones para alcanzar la misma configuración de efecto final dentro del espacio de trabajo del robot. III. CONCLUSIÓN La muñeca esférica brinda una forma para posicionar al efector final dándole 3 grados de libertad. En la cinemática inversa hay que tener cuidado en que el signo en el ángulo θ1 nos dará las 2 formas para llegar al punto final. Cada conjunto de soluciones está asociado a una [1] Reza N. Jazar, “Theory of Applied Robotics”, 2nd ed., Ed. Springer, 2010, pp. 291-301, 361-383.