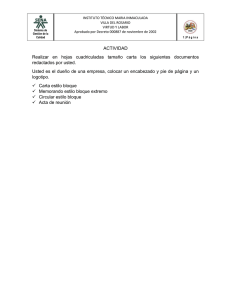
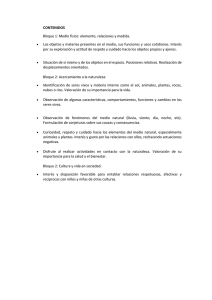
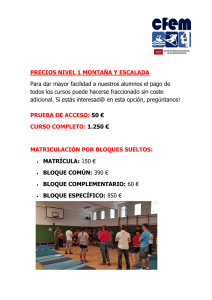
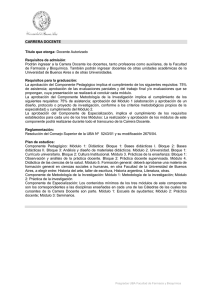
Método secuenciador En los métodos de diseño neumáticos la secuencia nos marcará la complejidad del circuito. Además, la posibilidad de modificarlo (ampliación, reducción o modificación) o búsqueda de averías se puede hacer muy engorrosa. En circuitos secuenciales complejos con movimientos que se repiten durante la evolución de la secuencia, es de interés aplicar: 1. SECUENCIADOR: conjunto de módulos adosados, de tal manera que cada uno de ellos dará señal a cada una de las fases que componen la secuencia. Son cadenas secuenciales modulares formados por un conjunto de módulos adosados que excitan individualmente cada una de las fases que componen la secuencia (son un bloque que contiene una entrada/salida, de manera que agrupamos los necesarios). Cada módulo del secuenciador tiene dos partes, la salida que se unirá con el siguiente modulo que corresponda para realizar el pilotaje de la siguiente fase, y la entrada que recibe señal del final de carrera de la fase anterior para dar salida al módulo siguiente, de tal manera que en todo momento únicamente uno de los módulos está activo. Además, hay un módulo especifico inicial y otro final: el inicial recibe la alimentación neumática y señal de las condiciones iniciales para comenzar la secuencia, en caso de que se cumplan el primer movimiento de la secuencia. El final es de salida y su señal indica que la secuencia ha terminado satisfactoriamente. En la imagen se muestra un secuenciador FESTO de 4 módulos paso a paso: consta de 3 módulos TAA y uno TAB. El secuenciador sólo se ocupa del cambio de fase, las funciones adicionales (start, stop, ciclo continuo/único, etc.) hay que incluirlas con la conexión de las válvulas necesarias para su realización. 2. MICROSECUENCIADOR: también llamados circuitos secuenciadores, son un único módulo monoblock que agrupa varias entradas/salidas (lo explicado en el punto uno pero en un único modulo). En la figura un microsecuenciador con 12 pasos de conmutación, especialmente apropiado para ser combinado con el controlador. El microsecuenciador sólo se ocupa del cambio de pasos en la secuencia mientras que el controlador añade importantes funciones para el control secuencial: reset, start, stop, preselección de ciclo continuo / ciclo individual, etc. Con el controlador integramos en un módulo diversas funciones que normalmente se diseñan con válvulas para el control secuencial. Ejemplo de conexión de microsecuenciador Ejemplo de conexión de microsecuenciador con controlador En este caso como el controlador dispone de las funciones comentadas, mediante interruptores, pulsadores y conmutadores le damos las ordenes al controlador que las traslada al microsecuenciador. El funcionamiento del microsecuenciador es el mismo que diseñar el funcionamiento con componentes independientes. El fabricante integra en un módulo o varios las operaciones de conmutación, de manera que en todo momento sólo uno de los módulos está activo, nos asegura que no habrá señales permanentes. De tal manera sólo hay que conectar los elementos necesarios para enviar los cambios de fase y conseguir la secuencia que deseemos ejecutar. DISEÑO DE CIRCUITOS CON SECUENCIADORES Dependiendo de los fabricantes, cada módulo hace la conmutación con unos componentes concretos (tipos de válvulas, o en caso de ser digital la correspondiente lógica de funcionamiento). El módulo dispone de los orificios “P”, “Y”, “Z” y “R” con las señales: P Aire comprimido de alimentación de toda la cadena secuencial. Y Señal que activa el primer módulo (estado “1”). Z Señal que anula al último módulo (estado “0”). R Señal de RESET que pone a “0” todos los módulos de etapa. En esta figura se puede visualizar el módulo de paso para 4 movimientos usando los símbolos típicos de la neumática: X1, X2, X3,....Xn, son las entradas de los módulos de paso, en ellas debe conectarse el final de carrera que dará paso al movimiento asignado para el siguiente módulo.. A1, A2, A3,....An, son las salidas de los módulos de paso, en ellas debe conectarse el actuador que ejecutará el movimiento. L, esta entrada puede taponarse, sirve para cancelar las salidas de los módulos y activar la salida del último. P, en esta entrada se conecta la línea de presión. Zn, permite cancelar la salida del módulo anterior. Zn+1,permite cancelar la salida del último módulo. Yn, permite activar la salida del módulo. Yn+1, es la salida del último módulo que sirve para activar otro módulo. Tanto en secuenciadores como microsecuenciadores siempre sólo una salida recibe presión en concordancia con la secuencia de los pasos de conmutación. En ese caso, las demás salidas están abiertas. El funcionamiento es seguro ya que el siguiente paso únicamente puede producirse si concluyó la ejecución del otro y si se produjo la confirmación respectiva. De tal manera, el diseño difiere de los métodos cascada y paso a paso: mientras que en estos métodos hacemos grupos con las fases de la secuencia para crear las líneas de presión y en función de esto añadimos las válvulas necesarias para formar la lógica del circuito, en el secuenciador no podemos hacer esto. En el secuenciador debemos contar las fases de la secuencia y montar tantos módulos como fases, no hay posibilidad de agrupaciones ni operaciones con los movimientos de la secuencia. Por tanto, para una secuencia de 5 fases montaremos un secuenciador de 5 módulos. 2 formas de conexión de la marcha. MARCHA LOGICA (CON VALVULA DE SIMULTANEIDAD) MARCHA DIRECTA Inicio de secuencia señal de comienzo de secuencia. Entrada 1 condiciones de cambio de primera fase (de fase 1 fase 2). Entrada 2 condiciones de cambio de segunda fase (de fase 2 fase 3). Entrada 3 condiciones de cambio de tercera fase (de fase 3 fase 4). Entrada 4 condiciones de cambio de cuarta fase (de fase 4 fin de secuencia). Fin de secuencia señal de ciclo de secuencia completada. Salida 1 fase 1 de la secuencia. Salida 2 fase 2 de la secuencia. Salida 3 fase 3 de la secuencia. Salida 4 fase 4 de la secuencia. SECUENCIADOR NEUMÁTICO SECUENCIA: A+ A- B+ BBloques de secuenciador que se le tiene que implementar 4 Al no realizar grupos en la secuencia (como en los métodos cascada y paso a paso), las condiciones de cambio de fase serán los finales de carrera de la fase anterior. Entonces las lógicas de las funciones serían: Inicio fin de secuencia completa y pulsador marcha (inicio de secuencia). Entrada Bloque 1: A+ final carrera avance vástago cilindro A. Entrada Bloque 2: A- final carrera retroceso vástago de cilindro A Entrada Bloque 3: B+ final carrera avance vástago cilindro B Entrada Bloque 4: B- final carrera retroceso vástago cilindro B Salida Bloque 1 A+ Salida Bloque 2 ASalida Bloque 3 B+ Salida Bloque 4 B- Se puede observar en la figura: Al módulo de entrada entran alimentación neumática y las condiciones iniciales que en este caso son que la secuencia esté terminada (b0) y el pulsador de marcha. Al cumplirse las condiciones iniciales, hay aire en la salida del módulo 1 que se dirige hacia el pilotaje A +, primera fase de la secuencia de movimientos. Al terminar el movimiento de salida de A, tendrá señal el final de carrera a1 y entrará aire en la entrada del módulo 1, pasando directamente a la salida del segundo módulo, comenzando la segunda fase. Hay tantos módulos como fases: Al haber señal en la entrada del último módulo, en este ejemplo el número cuatro, aparece señal en el módulo final indicador de que la secuencia ha terminado, señal que se llevará a donde convenga. Vamos a hacer el circuito. El primer paso es añadir los módulos de la biblioteca “grupos de válvulas” y se interconectan 3 TAA y el último uno TAB (son módulos paso a paso de festo, recordar que en el diseño con el método paso a paso la posición de la última válvula era diferente a las otras). Añadimos cilindros doble efecto los cilindros siempre irán conectados a valvulas para permitir el escape de aire de sus cámaras, nunca directos al módulo. Añadimos las entradas. Añadimos una fuente de presión, alimenta al módulo, a las valvulas de los cilindros y valvulas de condiciones de cambio. Conectamos el fin de secuencia al primer módulo y ponemos cierres a la entrada/salida de reset y a la salida de aire del ultimo modulo ya que no vamos a utilizar esas conexiones. Para poner run cierre pinchamos dos veces sobre la conexión y seleccionamos el segundo símbolo (T invertida). Y probamos el circuito. Poner la velocidad de simulación de 10 a 15. Le añadimos unas modificaciones. Observar cómo se conectan las valvulas de ciclo único y ciclo continuo: podríamos decir que con una T conectamos los manguitos de presión. Aunque en este caso funciona perfectamente, para otros casos habría que conectar con valvulas lógicas (AND, OR…), porque el uso de estos accesorios nos asegura que las entradas no se intercambian presión. SECUENCIADOR NEUMÁTICO SECUENCIA: A+ (A- B+) BBloques de secuenciador que se le tiene que implementar 3 En este caso como A- B+ se ejecutan a la vez tenemos 3 fases. La entrada del segundo bloque tendrá A0 y B1, y su salida irá conectada a ambos cilindros: retroceso A y avance B. Inicio fin de secuencia completa y pulsador marcha (inicio de secuencia). Entrada Bloque 1: A+ final carrera avance vástago cilindro A. Entrada Bloque 2: A- B+ final carrera retroceso vástago de cilindro A y final carrera avance vástago cilindro B. Entrada Bloque 3: B- final carrera retroceso vástago cilindro B. Salida Bloque 1 A+ Salida Bloque 2 A- B+ Salida Bloque 3 B- Observar que los finales de carrera del módulo 2 se pueden conectar enseriados o con válvula de simultaneidad. SECUENCIADOR NEUMÁTICO SECUENCIA: A+ (A- B+) (B- A+) A4 fases en la secuencia. Bloques de secuenciador que se le tiene que implementar 4 En este caso como el cilindro A tiene varias órdenes iguales, hay que añadir valvulas OR a los cilindros para que active la orden de avance y retroceso de varios módulos. Igualmente, los finales de carrera habrá que conectarlos a varias entradas, tanto en serie como paralelo. Recordar: función booleana AND es serie (multiplicación) y función OR es paralelo (suma). Inicio fin de secuencia completa y pulsador marcha (inicio de secuencia). Bloque 1 (cambio de fase): A+ final carrera avance vástago cilindro A. Bloque 2: A- B+ final carrera avance vástago de cilindro B y final carrera retroceso vástago cilindro A. Bloque 3: B- A+ final carrera avance vástago de cilindro A y final carrera retroceso vástago cilindro B. Bloque 4: A- final carrera retroceso vástago cilindro A. Las funciones de entrada booleanas serian: F (inicio) PULSADOR MARCHA . FIN DE SECUENCIA F (bloque 1) A1 F (bloque 2) A0 . B1 F (bloque 3) B0 . A1 F (bloque 4) A0 Las funciones de salida booleanas serian: F (A+) FASE 1 + FASE 3 F (A-) FASE 2 + FASE 4 F (B+) FASE 2 F (B-) FASE 3 A1-(56-75) 6/2/08 18:29 Page 63 LÓGICA NEUMÁTICA Y COMPLEMENTOS Procesamiento lógico Válvulas miniatura de alta velocidad solas, apilables o en módulos combinados, con funciones lógicas estándar incorporadas. La gama incluye también temporizadores y módulos de impulso. • Gama completa • Módulos aislados, apilables o asociables • Tiempos de respuesta extremadamente cortos • Sistema flexible de alto mantenimiento • Raíl de montaje DIN Información de funcionamiento Presión de trabajo 3 a 8 bares Temperatura de trabajo -15 hasta 60°C Caudal (Qmáx) 180 l/min (PRD = 60 l/min) Aprobación ATEX: CE Ex ll 2 GD c 85°C Para productos específicos ATEX contacte con nuestra Oficina de Ventas Consultar el CD para las especificaciones técnicas Secuenciador lógico Juego módulos de cabezal y cola y de módulos de derivación Base de módulo de etapa Memoria del módulo de etapa Ref. Ref. Sin sub-base Salida neumática PSM-A10 Indicación visual de la salida neumática y mando manual PSM-A12 Con sub-base Sin mando manual PSM-B12 Ref. Sub-base PSB-A12 Juego de cabezal y cola PSE-A12 Enclavamiento adicional PSV-A12 Derivación estándar PSD-A12 Derivación remota PSD-B12 Elementos lógicos asociables De conexiones instantáneas orientables Ø 4 mm. Con testigo de presión. PLL - B12 Célula ‘’Y’’ Con chavetas de asociación integradas y selector de esquemas PLK - B12 Célula ‘’O’’ Con chavetas de asociación integradas y selector de esquemas PLN - B12 Célula ‘’NO-inhibición’’ Con chavetas de asociación integradas y selector de esquemas PLE - B12 Módulo de entrada Con chavetas de asociación integrada, chip de fijación para perfil DIN y plaqueta final para cierre del bloque constituido FLUIDAL, S.L. Pº Ubarburu, 79 20.115 ASTIGARRAGA Telf. 943 453 795 Fax 943 454 811 fluidal@fluidal.com A1-(56-75) 6/2/08 18:29 Page 64 LÓGICA NEUMÁTICA Y COMPLEMENTOS Elementos lógicos para montaje sobre placa base PZU* PLK-C10 PLL-C10 PLN-C10 PLN-D10 Célula "Y" Célula "O" Célula "NO estándar" Célula "NO umbral" Con indicación visual de la señal de salida "s". Con indicación visual de la señal de salida "s". Con indicación visual de las señales neumáticas "a" y salida "s". Con indicación visual de las señales neumáticas "a" y salida "s". PLJ-C10 PLM-A10 Base para elementos y relés lógicos Estas bases pueden utilizarse unitariamente o en asociación entre si. 3 orificios y 4 orificios Ref. de pedido Célula ‘’SI’’ Con indicación visual de las señales neumáticas ‘’a’’ y de la salida ‘’s’’ Módulo de entrada PZU-E12 Función MEMORIA Base común de 3 orificios PZU-A12 Con prioridad de la señal reset y con indicación visual de la salida s, con mando manual. Base cascada de 3 orificios PZU-C12 Base de 4 orificios PZU-B12* * Para combinar con relés de memoria Conexión instantánea para tubo de Ø: 4 mm. Referencias de las células lógicas con su base PZU Referencia Función Compuesto por PLL-C12 Y PLL-C10 + PZU-A12 PLK-C12 O PLK-C10 + PZU-A12 PLN-C12 No estándar PLN-C10 + PZU-A12 PLN-D12 No umbral PLN-D10 + PZU-A12 PLJ-C12 SI PLJ-C10 + PZU-A12 PLM-A12 MEMORIA PLM-C10 + PZU-B12 Elementos lógicos para montaje en línea PLL-A11 PLK-A11 PZM-L199 Célula "Y" Célula "O" Conjunto tornillo + clip De conexiones instantáneas laterales Ø 4 mm. De conexiones instantáneas laterales Ø 4 mm. Permite el montaje de las células lógicas y el perfil S2 FLUIDAL, S.L. Pº Ubarburu, 79 20.115 ASTIGARRAGA Telf. 943 453 795 Fax 943 454 811 fluidal@fluidal.com A1-(56-75) 6/2/08 18:29 Page 65 LÓGICA NEUMÁTICA Y COMPLEMENTOS PRT Temporizador PRT Para montar sobre base asociable "de entrada común" o "en cascada" Símbolo gráfico Función De salida positiva De salida negativa PRT-A10 Dominio de tiempo Referencia 0,1 a 3 s PRT-E10 0,1 a 30 s PRT-A10 10 a 180 s PRT-B10 0,1 a 3 s PRT-F10 0,1 a 30 s PRT-C10 10 a 180 s PRT-D10 Tapa de precinto LPS10 LA9-D901 Manocontacto (Contacto eléctrico a presión) Características técnicas LPS 10/3 0,7 a 8 bar Presión nominal de contacto Fluido admisible Tiempo de respuesta Características eléctricas Temperatura de utilización Conexiones eléctricas Referencias LPS10/3 LPS10/2 Referencia Cable con enchufe LLEAD10 moldeado LPSV10 LPS 10/2 0,2 a 2 bar Aire filtrado 50μ 3 ms 5A -230 V -10˚C +60˚C Utilización Contacto 1: común Contacto 2: normalmente cerrada Contacto 3: normalmente abierto En un sistema neumático, para poner en marcha un motor eléctrico, una alarma sonora o efectuar una visualización luminosa: - en un sistema asociable POLYLOG - de forma clásica, en componentes independientes Vacuostato (Contacto neumático eléctrico, para vacío) Características técnicas Características eléctricas Vida eléctrica Regulación Señal para operar 5A a 220V corriente alterna Dependiente de la carga Simple, con tornillo ranurado a prueba de vibración Por encima de 180 mm Hg. Conexiones eléctricas Referencias LPSV10 PRD-A10 Contacto 1: común Contacto 2: normalmente cerrada Contacto 3: normalmente abierto Los elementos se suministran con clavijas para su conexionado. También se incluyen las juntas tóricas y los tornillos anclaje. Opcionalmente puede suministrarse aparte un conector especial moldeado. Ref. LLEAD10 NOTA: En este conector no debe sobrepasarse de 3A. los colores de las salidas para este conector: contacto 1 - Rojo; Contacto 2 - Blanco; Contacto 3 - Negro Amplificador sensible Características técnicas Referencias Presión de utilización (p) 3 a 8 bar PRD-A10 Presión de entrada (a) Presión auxiliar (px) 0,5 a 2 mbars (supresión máxima admisible = 200 mbar) 100 a 200 mbar Consumo a 100 mbar con a = 0 : 3 l/mn ANR Función Frecuencia máxima de funcionamiento 10 Hz Mando manual Sí PRD-A12 - Módulo completo montado sobre placa base asociable PZU - B12 Bases independientes para montaje sobre pletina o sobre chasis Base para célula Tres orificios de G1/8 para conectar a los orificios 1, 2 y 3 de las células Referencia: LBSPUB10 Base para temporizador Tiene orificio 2 taponado. El orificio 1 se prolonga internamente para poder suministrar aire a las entradas 1 y 2 del temporizador. La base puede usarse con temporizador n.a. o n.c. Cuando se emplea con un temporizador n.a., se obtiene un elemento del impulsos Referencia: LBSPSB10 A1-(56-75) 6/2/08 18:29 Page 66 LÓGICA NEUMÁTICA Y COMPLEMENTOS COMPLEMENTOS POLYLOG SERIE PXV Indicadores visuales Ø 22 mm. Características técnicas Presión de trabajo Temperatura de trabajo Conexión Color Verde Rojo Amarillo Azul Blanco 1-8 bares -15 hasta +60ºC Ø4 mm recto Instantánea como estandar Referencia PXV-F131 PXV-F141 PXV-F151 PXV-F161 PXV-F111 Referencias ATEX, añadir sufijo -EX. Ejemplo: PXV-F131-EX PCT-A11, PCT-B11 Totalizador neumático Características técnicas Presión de utilización Fluido admisible Temperatura de funcionamiento Temperatura de almacenamiento Resistencia mecánica (n° de maniobras) en aire seco a 6 bar y a 20° C - frecuencia 1 Hz PCT-A11 PCP-A11 PCT-B11 PCP-S11 PCT-A PCT-B 3 a 6 bars 3 a 6 bars aire o gas neutro filtrado 50 μm, preferentemente no lubrificado 0° C a + 60° C 0° C a + 60° C - 40° C a + 70° C - 40° C a + 70° C 10 millones 10 millones Este contador totaliza los impulsos que recibe visualizándolos. La puesta a cero se realiza o bien manualmente o por un impulso neumático. Referencias PCT-A11 PCT-B11 Preselector neumático Características técnicas Duración mínima del impulso de rearme Frecuencia del funcionamiento máximo Conexiones: racores instantáneos para tubo Øex. Referencia de las conexiones Fijación Peso Dimensiones Número de cifras PCP-A11 PCP-S11 180 ms. 20 impulsos/s. 4 mm. Z = Entrada del impulso a contar Y = Entrada del impulso de rearme A = Señal de salida P = Pres. de aliment. de 3 a 6 bar 2 tornillos M4, cabeza avellanada 0,160 Kg. 3 x 4 mm. 5 Función PCP-A11 Suministra una señal A cuando se alcanza un número determinado de impulsos. El número de impulsos deseado se obtiene por preselección de las teclas del cuadrante inferior. Su visualización es permanente. La entrada de impulsos que se han de contar se realiza en el orificio Z. La señal A se obtiene cuando coinciden los cuadrantes. El orificio Y permite la puesta a cero del cuadrante superior por un simple impulso neumático. PCP-S11 Suministra una señal A cuando el número visualizado es igual a cero. El número de impulsos deseado se preselecciona con la ayuda de las teclas del cuadrante inferior. La entrada de impulsos se realiza en el orificio Z y tiene por efecto sustraer una unidad a cada impulso. El orificio Y permite la reinicialización del preselector en el valor seleccionado. Opcional: Tapa de encallamiento Referencias: PXC-A1 - Para plastrón de 60 x 50 mm. Con cerradura grado de protección IP55 PXC-B1 - Para plastrón de 60 x 75 mm. Referencia PCP-A11 PCP-S11 PCM-A11 Minuterías con preselección digital gráfico Con puesta a cero por señal neumática o manual. (Posibilidad de adición de cubierta de protección) tiempo tiempo 1 segundo 1 segundo a 27 horas PCM-A11 1 minuto 1 minuto a 69 días PCM-B11 El tiempo deseado se obtien por preselección de las teclas del cuadrante inferior. Su visualización es permanente. PCM-C11 Minuterías de cuadrante Con plastrón de 72 x 72 Símbolo gráfico Con puesta a cero por corte de la señal de accionamiento Dominio de tiempo Referencia 3a 100 s PCM-C11 0,3 a 10 mn PCM-D11 3a 100 mn PCM-E11 El tiempo deseado se obtien por preselección directa sobre el cuadrante llevando la aguja de regulación a la posición elegida.