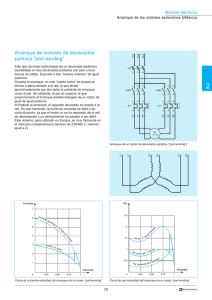
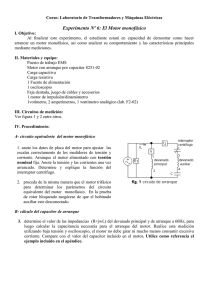
INSTITUTO TECNOLOGICO DE CHETUMAL Peña Villamonte Hiram Jonadab ING. GERMAN R. MAY CONTROL DE MAQUINAS ELECTRICAS. UNIDAD #4 4.1 Esquemas de la variación de la velocidad de las máquinas eléctricas. Ventajas de la variación de velocidad Menor sobre intensidad de arranque. Posibilidad de ahorro de energía. Optimización del factor de potencia. Objeto y principio de la variación de velocidad. Fijar la velocidad de movimiento Varias velocidades por movimiento Aproximación (lento) Trabajo (rápida) Retorno (muy rápido) Mantener la velocidad constante Variaciones en la red Variaciones en la carga Arrancar y parar con suavidad Menor corriente arranque Menor golpe mecánico Posicionar Ajustar un parámetro proceso Presión, caudal, etc. Bobinado, V. Corte lineal Sincronizar velocidad, posición Entre máquinas o partes ELECCION DEL VARIADOR DE VELOCIDAD. • • • • POTENCIA para generar el par motor TIPO DE CARGA que manejamos DINAMICA del accionamiento PRECISIÓN requerida VARIADOR DE VELICIDAD PARA MOTORES TRIFASICOS.CA. 4.2-Control eléctrico de velocidad de motores de doble régimen. La velocidad de un motor AC monofásico asincrónico. Se sabe que la variación de la frecuencia en un motor AC produce una variación de la velocidad debido a: En teoría el motor debe girar a 1800 RPM, pero como es un motor asincrónico, éste nunca podrá alcanzar la velocidad de sincronismo. Por ejemplo un motor de ventilador que tiene 4 polos, una corriente de arranque de 1 amperio tiene una velocidad de 1700 RPM funcional. MECANISMO DE CONTROL Uno de los mecanismos más utilizados es el de un inversor, el cual convierte la corriente continua en corriente alterna y mediante el disparo de unos transistores de potencia se puede producir la frecuencia requerida para el control del motor. Mediante una fuente de swicheo rápido como la de las CPU se transforma la corriente de la red en DC de 12 V. Para generar una tensión alterna a partir de estos 12 V se aplica alternativamente la tensión de 12 V a los devanados de baja tensión de un transformador empleando interruptores conmutados electrónicamente. A través de las resistencias R1 y R2 los transistores 2N2222 reciben una señal proveniente del PIC 16F84 que indica la frecuencia que se necesita para una velocidad especifica. Estos transistores configurados como corte y saturación son los encargados de excitar los pares darlington con resistencia de emisor para dar una mayor estabilidad al circuito (BD244 y 2N3055 complementarios). Se produce una excitación alternada en el devanado primario y se logra de esta manera una inducción de voltaje al devanado secundario de 120V, suficientes para activar el motor. MOTOR DE FASE PARTIDA. El motor de fase partida es uno de los distintos sistemas ideados para el arranque de los motores asíncronos monofásicos. Se basa en cambiar, al menos durante el arranque, el motor monofásico por un bifásico (que puede arrancar sólo). El motor dispone de dos devanados, el principal y el auxiliar; además, lleva incorporado un interruptor centrífugo cuya función es la de desconectar el devanado auxiliar después del arranque del motor.1 Además del motor de fase partida existen otros sistemas para arrancar motores monofásicos como es el caso de motores de arranque por condensador. La necesidad del motor de inducción monofásico de fase partida se explica de la siguiente forma: existen muchas instalaciones, tanto industriales como residenciales a las que la compañía eléctrica solo suministra un servicio de c.a monofásico. Además, en todo lugar casi siempre hay necesidad de motores pequeños que trabajen con suministro monofásico para impulsar diversos artefactos electrodomésticos, fundamentalmente frigoríficos. En estos no se emplean los interruptores centrífugos, sino interruptores electromagnéticos, que disponen de una bobina conectada en serie con el bobinado principal. En el arranque, la intensidad de corriente en este es muy alta y el interruptor electromagnético cierra un contacto que conecta el bobinado de arranque o auxiliar. A medida que va alcanzando velocidad va disminuyendo la intensidad, hasta que la bobina del interruptor deja de mantener cerrado el contacto y se desconecta el bobinado de arranque. Otra manera de hacer esta función es empleando una resistencia PTC en serie con el bobinado de arranque. En el momento de conectar el motor la resistencia está fría y su valor es bajo, circulando una intensidad elevada por el bobinado de arranque. Esta corriente va calentando la resistencia, por lo que su valor va aumentando considerablemente, produciendo una disminución de la intensidad hasta hacerse muy pequeña. La mayoría de los motores monofásicos de fase partida son motores pequeños cuyas potencias son fracciones de caballo de vapor. Tanto para 115 V como para 230 V en servicio monofásico. Los motores monofásicos de inducción de fase partida experimentan una grave desventaja. Puesto que solo hay una fase en el devanado del estator, el campo magnético en un motor monofásico de inducción no rota. En su lugar, primero pulsa con gran intensidad, luego con menos intensidad, pero permanece siempre en la misma dirección. Puesto que no hay campo magnético rotacional en el estator, un motor monofásico de inducción no tiene par de arranque. Es por ello que se conecta en paralelo una bobina de arranque. Para así poder crear un campo giratorio y de esta manera tener un torque de arranque, la bobina de arranque es desconectada por medio de un interruptor centrífugo. Por lo tanto la única forma de cambiar o variar la velocidad de un motor de fase partida es, 1. Cambiando la frecuencia de la corriente. 2. Cambiando el número de polos de la máquina. 4.3 Variadores de velocidad estático de máquinas de corriente continúa. Para que un motor de cd funcione adecuadamente, debe tener incorporado algún equipo de control y protección especial. El propósito de este equipo es 1. 2. 3. 4. Proteger al motor contra daños debido a cortocircuitos en el equipoProteger a motor de daños por sobrecalentamiento prolongado. Proteger al motor contra daños por corrientes de arranque excesivosProporcionar una conveniente de controlar la velocidad de operación del motor. Las técnicas disponibles para el control de velocidad de un motor compuesto de cd acumulativo son las mismas disponibles para un motor de derivación. 1. Cambio en la resistencia de campo RF 2. Cambio en el voltaje de inducción VA 3. cambio en la resistencia del inducido RA Los argumentos que describen los efectos de cambiar RF o VA son muy parecidos a los argumentos descritos con anterioridad para el motor de derivación. En teoría, se pueden controlar a los motores de cd compuesto diferencial de una forma similar. Puesto que casi nunca se utilizan los motores compuestos diferenciales, no tiene mucha importancia. La velocidad del motor se ajusta con el potenciómetro de 25 K. Al girarlo hacia arriba, aumenta la velocidad del motor, esto se debe a que el voltaje de compuerta en relación con tierra se vuelve una parte mayor del voltaje respectivo de la línea de CA, y esto permite que el voltaje de compuerta a cátodo llegue más temprano en el ciclo al valor del voltaje de disparo del SCR. La relación entre la velocidad y el ángulo de retardo de disparo, para este sistema, se grafica. Se puede ver que la acción de control de velocidad se logra en un ajuste bastante apretado de unos 70˚ a 110˚. Cuando disminuye la fuerza electromotriz, baja el voltaje de cátodo a tierra, porque VK depende de gran parte de la fuerza electromotriz. Si VK disminuye, el disparo del SCR se efectúa antes porque VG no tiene que aumentar tanto para que el voltaje cátodo-ánodo sea lo suficientemente grande como para disparar el SCR. Un aumento en el par de giro produce una reducción en el ángulo de disparo, a su vez, esto nos da una mayor corriente y voltaje de armadura elevando la velocidad y compensando cualquier caída de velocidad dada por la elevación de par de giro. Control de Media Onda para la Velocidad de un Motor DC El funcionamiento de este control se describe a continuación: la corriente alterna que llega se rectifica en un puente de onda completa, cuyo voltaje pulsante de DC se aplica al devanado de campo y al circuito de control de armadura. Se carga el capacitor con la corriente que fluye por el devanado de la armadura, de baja resistencia, a través del diodo D2 y el potenciómetro para el ajuste de velocidad luego sigue a la placa superior del capacitor. El capacitor se carga hasta llegar al voltaje de transición conductiva del SUS [Interruptor unilateral de silicio]. En ese instante el SUS permite que se descargue parte del capacitor en la compuerta del SCR, disparándolo. El ángulo de disparo se determina por la resistencia del potenciómetro de ajuste de velocidad, que determina la rapidez de carga de C. El diodo D3 suprime toda polarización inversa producto del devanado inductivo de la armadura al terminar medio ciclo. Cuando el SCR abre al final de un hemiciclo, la corriente continúa circulando en el lazo D3 y armadura. El objeto de la combinación R1-D1 es proporcionar una trayectoria de descarga para el capacitor C. Recuerde que él SUS no vuelve totalmente a los 0 V, cuando se dispara. El capacitor no puede descargar toda su carga a lo largo del circuito cátodo-compuerta del rectificador del silicio. Queda algo de carga en la placa superior de C. A medida que los pulsos del suministro de DC se acercan a 0, la carga en C se descarga a través de R1 y D1. Así el capacitor pierde toda carga residual para comenzar la siguiente pulsación del puente de diodos. Control de velocidad de motor de corriente directa. 4.3 Variadores de velocidad estáticos de máquinas de corriente alterna. Los variadores de frecuencia se utilizan en motores trifásicos asíncronos con rotor en cortocircuito. Dicha variación de frecuencia se realiza mediante un aparato electrónico que tiene dos fases de funcionamiento: rectificación. Conversión En la primera fase, el aparato electrónico rectifica la tensión alterna convirtiéndola en tensión continua. En la segunda fase, se vuelve a convertir las tensiones alternas, pro con la posibilidad de poder modificar tanto la tensión como la frecuencia. Esta etapa la realiza un componente electrónico denominado ondulador. Para poder controlar la velocidad de este tipo de motor, necesitamos mantener la relación existente entre la tensión y la frecuencia de forma constante, de esta forma se consigue un par de contante y su regulación. Otras formas de tipo de frenado de motor son: Por contracorriente Por electroimán Por corriente continua Velocidad en motores asíncronos de rotor bobinado. Este tipo de motor, para su fase de arranque necesita de un conjunto de resistencia conectada en el bobinado rotorico, por este motivo, se les llama resistencia rotoricas. Pues bien, la velocidad del motor se gradúa atraves de estas resistencias. Cambiando su valor óhmico, modificamos la velocidad del motor.