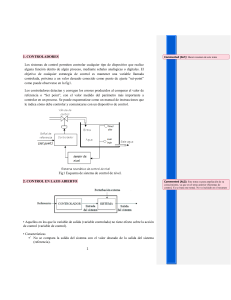
1. INTRODUCCION En la lucha por la supervivencia sólo se perpetúan los mejor adaptados, nos quería decir Darwin en su teoría sobre la evolución de las especies. De la misma forma la ingeniería de control moderna procura dotar a sus individuos de la propiedad adaptiva que les permita un desempeño óptimo cuando las condiciones del medio (sistema) varían con regularidad. Básicamente se trata de otorgarle al sistema de control una cierta capacidad de discernimiento que le permita juzgar su propio funcionamiento y aplicar las medidas correctivas necesarias a sus propios parámetros con el propósito de alcanzar el desempeño óptimo ante unas condiciones ambientales dadas. Las primeras aproximaciones al control adaptivo llegaron a mediados del siglo pasado sin embargo el grado de complejidad y el nivel de organización interno requeridos no se podían conseguir con las herramientas del momento y fue necesario esperar al desarrollo computacional para poder realizar modelos y formular teorías acerca del mismo. Fundamentalmente el control adaptivo se entiende como un sistema que pretende obtener las características deseadas de un sistema de referencia dado. También se puede visualizar como un regulador no-lineal de naturaleza autosintonizable. 2. HISTORIA DEL CONTROL ADAPTATIVO Con la llegada de la Revolución Industrial en el siglo XIX se empezaron a presentar procesos de producción que requerían de sistemas de automatización cada vez más complejos. Sin embargo, no es hasta la primera guerra mundial cuando se empieza a desarrollar la ingeniería de control, esto debido a la necesidad de las grandes potencias de desarrollar armas de fuego y pilotos automáticos para naves aéreas y marítimas. En la década de los 40 se hacen diversos estudios entre los que se destacan el del lugar geométrico de las raíces y los métodos de respuesta en frecuencia. La teoría moderna de control automático surge con la necesidad de controlar plantas que tenían más de una entrada y salida. El control adaptivo en si, empieza a desarrollarse en los años 50 con algunos intentos fallidos al tratar de diseñar pilotos automáticos. Ya para los años 60 con el desarrollo de la teoría de control es que se logra un mejor entendimiento del control adaptivo. El auge del control adaptivo llega en los años 70 cuando muchos investigadores se dan a la tarea de crear las bases teóricas de controladores adaptivos y es en esta época cuando se presentan las primeras aplicaciones exitosas en este campo. Se desarrolla la teoría de control adaptivo de modelo de referencia que busca que el sistema se comporte como un modelo seleccionado de tal forma que el sistema resultante llegue a alcanzar la estabilidad. 3. QUE ES UN SISTEMA ADAPTATIVO “Un sistema de control adaptivo es aquel que continua y automáticamente mide las características dinámicas de la planta, las compara con las características deseadas y usa la diferencia para variar parámetros ajustables del sistema o para generar una señal de accionamiento de modo que se pueda mantener el funcionamiento óptimo con independencia de las variaciones ambientales; alternativamente este sistema puede medir su propio funcionamiento de acuerdo con un índice de comportamiento dado y modificar de ser necesario sus propios parámetros para mantener el funcionamiento óptimo con independencia de los cambios ambientales.” En este sistema se puede identificar la planta y se observa como el índice de comportamiento es medido varias veces y su valor es comparado con el que se obtiene del controlador para finalmente tomar la decisión de cambiar o no la señal accionadora. Con fines explicativos, el proceso de un controlador adaptativo puede verse separando dos escalas de tiempo que evolucionan a diferente velocidad. Los cambios en los parámetros del controlador ocurren según la escala lenta. A su vez, la dinámica del lazo ordinario de realimentación transcurre según la escala rápida. Existen dos grandes grupos de controladores adaptivos, los Controladores Adaptivos con Modelo de Referencia (MRAC) y los Reguladores Autoajustables (STR). Estos últimos son sistemas de lazo abierto y modifican los parámetros del sistema a partir de una tabla previamente calculada para distintos puntos de funcionamiento, en función de una variable auxiliar. Los MRAC por su parte, logran un comportamiento de lazo cerrado dado por un modelo de referencia ante una entrada dada. La figura que se muestra a continuación es el diagrama de bloques que define un sistema adaptivo. PORQUE UN CONTROL ADAPTATIVO Y NO UNO CONVENCIONAL En el mundo de los UAS se debería optar por implementar un control adaptativo en lugar de uno convencional, ya que permite configurar el controlador de modo que éste se adapte automáticamente a las condiciones de vuelo cambiantes. Por ejemplo, durante el vuelo de un UAS, para distintos rangos de su velocidad puede variar la dinámica de la planta; a fin de optimizar el control de la planta se hace necesaria una regla de control que se adapte a este cambio en el sistema, que ciertos autopilotos de UAS ya pueden gestionar.