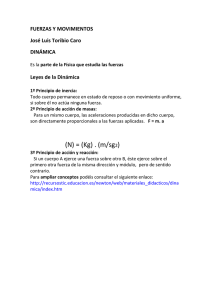
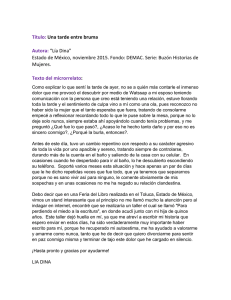
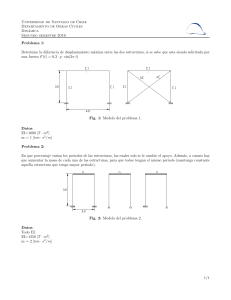
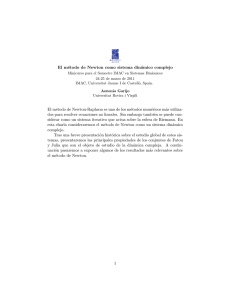
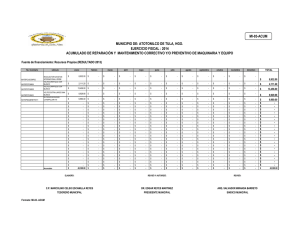
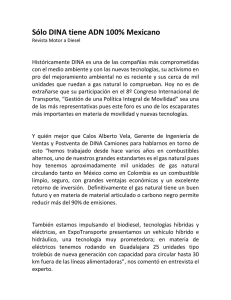
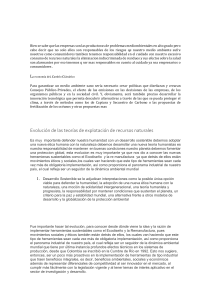
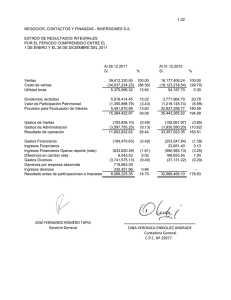
Análisis de Sistemas No Lineales Antonio Flores T. ∗ Departmento de Ciencias Universidad Iberoamericana Prolongación Paseo de la Reforma 880 México DF, 01210, MEXICO June 5, 2000 1 El plano de fase Dado un sistema dinámico compuesto de dos estados: dx1 = f1 (x1 , x2 ), x1 (0) = xo1 dt dx2 = f2 (x1 , x2 ), x2 (0) = xo2 dt (1.1) (1.2) la simulación dinámica del sistema producirá vectores x1 (t) y x2 (t). Si en vez de graficar x1 o x2 contra el tiempo, graficamos x1 contra x2 (siendo en este caso el tiempo un parámetro) obtendremos el ası́ llamado diagrama del plano de fase (también llamado retrato de fase o diagrama de fase) tal como se muestra en la figura 1. En este caso la única curva que presenta el diagrama anterior corresponda a la evolución dinámica de x1 y x2 partiendo de una sola condición inicial representada por xo1 y xo2 . El diagrama de fase está compuesto por una familia de curvas tales como las descritas anteriormente. Para completar el diagrama de fase se debe simular el sistema original de ecuaciones partiendo, en cada caso, de condiciones iniciales diferentes: x̄(0), y graficando la respuesta obtenida. En la grafica 2 se muestra un ejemplo de un posible diagrama de fase. En esta grafica el punto ”•” representa las coordenadas asociadas a cada condición inicial; la punta de flecha sobre las trayectorias representa el sentido de la evolución dinámica dels sistema. El diagrama anterior podrı́a representar, por ejemplo, la evolución dinámica de un sistema que posee un único estado estacionario (el cual está localizado en el origen de coordenadas). ∗ E-mail: antonio.flores@uia.mx, http://kaos.dci.uia.mx, phone/fax: (+52)5 2674279 1 0 1 0 1 0 1 1 0 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 x 2 x 1 x (0) 1 Las flechas van hacia dentro Figura 1: x 2 x 1 Figura 2: El diagrama de fase de un sistema dinámico no lineal que presenta 3 estados estacionarios podrı́a estar representado por una figura como la mostrada en la figura 3; donde los estados estacionarios del sistema están representados por los puntos 1,2 y 3. Puede observarse claramente que los estados estacionarios 1 y 3 son estables; mientras que el estado estacionario 2 es inestable. Dependiendo del punto de arranque (es decir, de la condición inicial) la trayectoria dinámica puede dirigirse al estado estacionaro 1 o 3. Ninguna trayectoria dinámica finaliza en el estado estacionario 2 debido a la naturaleza inestable de dicho punto. La gran mayorı́a de análisis en el plano de fase se realiza sólo para sistemas de dos estados (lo cual constituye una desventaja de este tipo de análisis). Como es claro, también podrı́a realizarse el análisis dl plano de fase en sistemas compuestos por tres estados. La imposibilidad de visualizar sistemas de orden mayor a 3 hace poco útil el análisis del plano de fase. Sin embargo, cuando resulta posible su aplicación proporciona información cualitativa relevante para analizar la conducta dinámica del sistema bajo estudio. 2 x 2 1 2 3 x 1 Figura 3: 2 Clasificación de la conducta dinámica de sistemas lineales Usando al análisis del plano de fase, obtendremos todos los tipos de conducta dinámica que un sistema lineal puede presentar. Cualquier sistema dinámico lineal compuesto de dos estados (x, y) se puede representar de la siguiente forma: dx = ax + by dt dy = cx + dy dt (2.3) (2.4) siendo a, b, c y d los coeficientes del anterior grupo de ecuaciones. La conducta dinámica del sistema lineal depende completamente de los eigenvalores de la matriz jacobiana A: A= a b c d (2.5) a su vez los eigenvalores de la matriz A dependen del valor de los coeficientes a, b, c, d. De acuerdo con los valores que pueden tomar los eigenvalores, podemos clasificar la conducta dinámica de un sistema lineal en los siguientes casos (notese que el estado estacionario del sistema siempre corresponde al vector: x = [0 0]T ). 1. Nodo estable. Los dos eigenvalores de A tienen parte real estrictamente negativa. 2. Nodo inestable. Los dos eigenvalores de A tienen parte real positiva. 3 Nodo Estable x x Nodo Inestable xx Tipo de Punto a Nodo estable -1 -1 -1 -1 b 0 1 0 1 c 0 0 1 1 d -1.5 -1.5 -1.5 -1.5 λ1 -1 -1 -1 -.2192 λ2 -1.5 -1.5 -1.5 -2.2808 λ1 1 1 1 .2192 λ2 1.5 1.5 1.5 2.2808 Table 1: Punto silla x x Espiral Estable Tipo de Punto a Nodo inestable 1 1 1 1 b 0 1 0 1 c 0 0 1 1 d 1.5 1.5 1.5 1.5 Table 2: x 3. Punto silla. Un eigenvalor tiene parte real negativa, y el otro tiene parte real positiva. x Espiral Inestable x x 4. Vórtice o espiral estable. Los dos eigenvalores tienen parte imaginaria (distinta de cero), y ambos poseen parte real negativa. 5. Vórtice o espiral inestable. Los dos eigenvalores tienen parte imaginaria (distinta de cero), y ambos poseen parte real positiva. 6. Centro. Los dos eigenvalores tienen solo parte imaginaria. Centro x x 7. Nodo degenerado. Los dos eigenvalores son idénticos. 8. Campo de lı́nea. Uno de los dos eigenvalores es cero. Nodo degenerado 4 Tipo de Punto a Nodo Silla -1 -1 -1 -1 b 0 1 0 1 c d 0 1 0 1 1 1 1 1 λ1 -1 -1 -1 -1.4142 λ2 1 1 1 1.4142 Table 3: Tipo de Punto a Vórtice estable -1 -1 -1 -1 b -2 -2 -2 -2 c d λ1 λ2 1 -1 -1+1.4142i -1-1.4142i 3 -1 -1+2.4495i -1-2.4495i 5 -1 -1+3.1623i -1-3.1623i 10 -1 -1+4.4721i -1-4.4721i Table 4: Tipo de Punto a Vórtice inestable 1 1 1 1 b -2 -2 -2 -2 c d 1 1 3 1 5 1 10 1 λ1 λ2 -1+1.4142i -1-1.4142i -1+2.4495i -1-2.4495i -1+3.1623i -1-3.1623i -1+4.4721i -1-4.4721i Table 5: Tipo de Punto a Centro -1 -1 -1 -1 b -2 -2 -2 -2 c d 1 1 3 1 5 1 10 1 Table 6: 5 λ1 λ2 0+1i 0-1i 0+2.2361i 0-2.2361i 0+3i 0-3i 0+4.3589i 0-4.3589i Tipo de Punto a Nodo degenerado -1 -1 -1 -1 -1 b 0 1 -3 -5 -5 c d λ1 0 -1 -1 0 -1 -1 0 -1 -1 0 -1 -1 10 -1 -1 λ2 -1 -1 -1 -1 -1 Table 7: Tipo de Punto a Campo de lı́nea 0 0 b 0 1 Table 8: 6 c 0 0 d λ1 -1 0 -1 0 λ2 -1 -1