Cavity detection in biomechanics by an inverse evolutionary point load BEM technique
Anuncio

This article was downloaded by: [Cerrolaza, Miguel][Consorci de Biblioteques Universitaries de Catalunya]
On: 13 December 2010
Access details: Access Details: [subscription number 919083124]
Publisher Taylor & Francis
Informa Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House, 3741 Mortimer Street, London W1T 3JH, UK
Inverse Problems in Science and Engineering
Publication details, including instructions for authors and subscription information:
http://www.informaworld.com/smpp/title~content=t713643452
Cavity detection in biomechanics by an inverse evolutionary point load
BEM technique
David Ojedaa; Eduardo Divob; Alain Kassabc; Miguel Cerrolazad
a
Faculty of Engineering, Department of Mechanical Design and Automation, University of Carabobo,
Carabobo, Venezuela b Department of Engineering Technology, University of Central Florida, Orlando,
Florida, USA c Department of Mechanical, Materials and Aerospace Engineering, University of Central
Florida, Orlando, Florida, USA d National Institute of Bioengineering, Central University of Venezuela,
Caracas, Distrito Capital, Venezuela
To cite this Article Ojeda, David , Divo, Eduardo , Kassab, Alain and Cerrolaza, Miguel(2008) 'Cavity detection in
biomechanics by an inverse evolutionary point load BEM technique', Inverse Problems in Science and Engineering, 16: 8,
981 — 993
To link to this Article: DOI: 10.1080/17415970802082914
URL: http://dx.doi.org/10.1080/17415970802082914
PLEASE SCROLL DOWN FOR ARTICLE
Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf
This article may be used for research, teaching and private study purposes. Any substantial or
systematic reproduction, re-distribution, re-selling, loan or sub-licensing, systematic supply or
distribution in any form to anyone is expressly forbidden.
The publisher does not give any warranty express or implied or make any representation that the contents
will be complete or accurate or up to date. The accuracy of any instructions, formulae and drug doses
should be independently verified with primary sources. The publisher shall not be liable for any loss,
actions, claims, proceedings, demand or costs or damages whatsoever or howsoever caused arising directly
or indirectly in connection with or arising out of the use of this material.
Downloaded By: [Cerrolaza, Miguel][Consorci de Biblioteques Universitaries de Catalunya] At: 17:37 13 December 2010
Inverse Problems in Science and Engineering
Vol. 16, No. 8, December 2008, 981–993
Cavity detection in biomechanics by an inverse evolutionary point
load BEM technique
David Ojedaa, Eduardo Divob, Alain Kassabc* and Miguel Cerrolazad
a
Faculty of Engineering, Department of Mechanical Design and Automation,
University of Carabobo, Valencia, Carabobo, Venezuela; bDepartment of Engineering
Technology, University of Central Florida, Orlando, Florida, USA; cDepartment of
Mechanical, Materials and Aerospace Engineering, University of Central Florida,
Orlando, Florida, USA; dNational Institute of Bioengineering, Central
University of Venezuela, Caracas, Distrito Capital, Venezuela
(Received 16 April 2007; final version received 30 November 2007)
An efficient solution of the inverse geometric problem for cavity detection using
a point load superposition technique in the elastostatics boundary element
method (BEM) is presented in this article. A superposition of point load clusters
technique is used to simulate the presence of cavities. This technique offers
tremendous advantages in reducing the computational time for the elastostatics
field solution as no boundary re-discretization is necessary throughout the inverse
problem solution process. The inverse solution is achieved in two steps: (1) fixing
the location and strengths of the point loads, (2) locating the cavity geometry. For
a current estimated point load distribution, a first objective function measures the
difference between BEM-computed and measured deformations at selected
points. A genetic algorithm is employed to automatically alter the locations and
strengths of the point loads to minimize the objective function. Upon
convergence, a second objective function is defined to locate the cavity geometry
modelled as traction-free surface. Results of cavity detection simulations using
numerical experiments and simulated random measurement errors validate the
approach in regular and irregular geometrical configurations.
Keywords: boundary element method (BEM); cavity detection; genetic algorithm;
elastostatics
1. Introduction
An inverse problem in engineering and science may be defined as one in which a solution is
sought for: (a) terms in the governing equation, (b) physical properties, (c) boundary
conditions, (d) initial condition(s) or (e) the system geometry, using over-specified
conditions. Typically, the over-specified conditions are provided by measuring a field
variable at the exposed boundary, as in the case of the inverse geometric problem.
However, in some inverse problems, the over-specified condition can be provided by
internal measurements of field variable via embedded sensors, see [1–9]. In this article,
*Corresponding author. Email: kassab@mail.ucf.edu
ISSN 1741–5977 print/ISSN 1741–5985 online
ß 2008 Taylor & Francis
DOI: 10.1080/17415970802082914
http://www.informaworld.com
Downloaded By: [Cerrolaza, Miguel][Consorci de Biblioteques Universitaries de Catalunya] At: 17:37 13 December 2010
982
D. Ojeda et al.
such measurements, along with accompanying noise, are simulated numerically.
The purpose of the inverse geometric problem that concerns this study, is to determine
the hidden portion of the system geometry by using over-specified boundary conditions
on the exposed portion. This problem has gained importance in thermal and solid
mechanics applications for nondestructive detection of subsurface cavities Ulrich et al. [8],
Kassab et al. [9,10]. In thermal applications, the method requires over-specified boundary
conditions at the surface, i.e. both temperature and flux must be given, see [7,11,12].
In elastostatics applications, the over-specified conditions are provided in terms of surface
displacements and tractions. Generally, surface tractions are known boundary conditions,
while the surface displacements are experimentally determined by measurements, see
Ulrich et al. [8] and Kassab et al. [9].
A variety of numerical methods have been used to solve the inverse geometric problem.
This inverse problem has applications in the identification of surfaces flaws and
cavities and in shape optimization problems, see [8,9,10,13–16,18]. The computational
burden is intensive due to the inherent nature of the solution to this inverse problem
which requires numerous forward problems to be solved, regardless of whether
a numerical or analytical approach is taken to solve the associated direct problem. This
is true for generalized cases of irregular geometries when an iterative method is required.
Moreover, in the inverse geometric problem, a complete regeneration of the mesh is also
necessary as the geometry evolves. Boundary element methods (BEM) lend themselves
naturally to the numerical solution of the inverse problem, see [8,9,19–29]. This is because
the solution algorithms typically involve minimization of residuals, which measure the
non-satisfaction of over-specified boundary conditions. Additionally, in the iterative
solution of this problem the geometry is continuously updated. This places a premium on
a numerical method, which does not require domain discretization, see [30,31].
A method for the efficient solution of the inverse optimization problem of cavity
detection using a point load superposition technique in elastostatics BEM is presented in
this article. The superposition of point load clusters in the domain is posed as an
alternative to satisfy the Cauchy conditions on the surface. The point loads must be
located inside the eventual cavity or outside the domain in order to correctly satisfy the
governing equation. Using Genetics Algorithms (GA), the point load distribution,
strength and location are altered to seek satisfaction of the over-specified boundary
displacements. Numerical results of direct 2D problems using the BEM are used as an
alternative to validate the approach. Results of cavity detection problems simulated using
numerical experiments and added random measurement errors validate the approach in
regular and irregular geometrical configurations with single and multiple cavities.
The superposition of point loads as an alternative to simulate the presence of a cavity
offers tremendous computational advantages as it allows to pose the inverse problem as
a search for the optimal strength and location of such point loads rather than requiring the
remeshing of the sought for cavity and thus the recomputation of co-efficients and full
solution of algebraic systems at every step of the optimization problem.
2. Elasticity BEM
The solution of the forward elastostatics problem is expressed in terms of displacements
which, for an isotropic, homogeneous and linearly elastic medium imposed with an
Inverse Problems in Science and Engineering
Downloaded By: [Cerrolaza, Miguel][Consorci de Biblioteques Universitaries de Catalunya] At: 17:37 13 December 2010
internal volumetric force bi, is governed by Navier’s equation as:
@2 u
@ 2 ui
j
þ
þ bi ¼ 0:
1 2 @xi @xj
@xi @xj
983
ð1Þ
Here, u is the displacement vector, is Poisson’s ratio and is shear modulus. Introducing
the fundamental solution to Navier’s equation, a BEM formulation can be derived from
the Somigliana identity providing an integral relation between the displacement vector u pi
in a point collocation ‘p’ and displacement vectors ui and traction vectors ti at the
boundary as well as the body forces bi:
I
I
Z
cpij u pi þ Hij ui d ¼ Gij ti d þ
Gij bi d:
ð2Þ
Here, is the problem domain, Gij and Hij are the displacement and traction fundamental
solutions, and cpij is a tensor determined by the boundary geometry at the collocation
point p. It is a diagonal matrix with diagonal elements equal to 1 if p is in the interior, 0 if p
is at the exterior and ð1=2Þ if p is on smooth boundaries. If p lies on a non-smooth
boundary such as a boundary corner, then the unit deflation argument can be used to
effectively evaluate the cpij tensor, see [30]. Establishing that internal force bi is formed
only by points loads, so that:
bi ¼
NL
X
Qli ðxi , xli Þ
ð3Þ
l¼1
where NL is the number of points loads, Qli is the intensity of each load and ðxi , xli Þ is the
Dirac’s delta function located in the impact point of each load xli . Using the properties of
the Dirac’s delta function, the last integral equation term Equation (2) is reduced to:
I
I
NL
X
cpij upi þ Hij ui d ¼ Gij ti d þ
Qli Glij :
ð4Þ
l¼1
Employing standard boundary element procedures, the above equation is written in
discrete form as:
½H fug ¼ ½G ftg þ fqg
ð5Þ
where the matrices [H] and [G], with dimensions N N, contain the influence co-efficent
that relates displacement and traction vectors {u} and {t} on the boundary. The size of N is
N ¼ d NE NN, where, d is the number of space dimensions (2 or 3), NE is the number
of elements and NN is the number of nodes per element. It is worth noting that all effects
generated by points loads are located in the vector {q}, therefore, when point loads that are
utilized in the inverse geometric problem solution are relocated in the evolving solution,
there is no need for boundary re-meshing.
Introducing the boundary condition u i and ti in Equation (5), an algebraic system with
the following form is obtained: [A] {x} ¼ {b} þ {q}. The vector {x} contains the unknown
values of {u} and {t}. This system of equations is solved using a standard method.
In this article, quadratic isoparametric discontinuous elements are employed: the geometry
and vectors {u} and {t} values are approximated using quadratic shape function locating
the displacement and traction nodes within the element boundaries.
984
D. Ojeda et al.
Downloaded By: [Cerrolaza, Miguel][Consorci de Biblioteques Universitaries de Catalunya] At: 17:37 13 December 2010
3. Cavity simulation
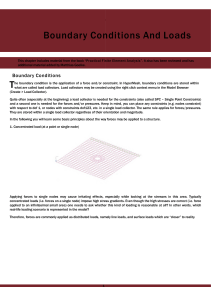
The approach proposed in this article for the modelling of internal cavity(ies) is inspired
by potential theory. For example, the superposition of a source and a sink with the same
strength located a distance L in a prescribed parallel flow results in iso-flow lines and
simulate the presence of a solid surface through the iso-lines containing stagnation points.
This null-flow line can be interpreted as the presence of a solid surface or the artificial
contour of an elliptical cavity, see Figure 1.
The notion of utilizing point sources and sinks to model cavities has been successfully
utilized by Divo et al. [7] in solving the inverse geometric problem by thermal methods.
This theory can be applied in elastostatics field where the interpretation is understood
as superposition of point loads and the flow is considered to be that of elastic energy.
With proper adjustment of the location, number and intensities of these loads, one can
generate a surface (or surfaces) that are traction-free and therefore interpreted as a cavity
surface(s), this is illustrated in Figure 2, where a cluster of such point loads is shown as an
elliptical arrangement with the zero-traction curve drawn around it.
4. Inverse problem
The numerical inverse process for cavity detection is achieved in 2 steps: (1) fixing the
location and strengths of the fictitious point loads and (2) locating the cavity geometry.
Sink
Source
∂f/∂n = 0
Prescribe
flow
Figure 1. Simulation of elliptical surface with an incoming parallel flow by singularities
superposition.
p
p=0
Elastic
Energy
Flow
p
p=0
Figure 2. Geometric arrangement of points loads with a non-uniform elastic energy flow.
Downloaded By: [Cerrolaza, Miguel][Consorci de Biblioteques Universitaries de Catalunya] At: 17:37 13 December 2010
Inverse Problems in Science and Engineering
985
For a current estimated point load distribution, a first objective function measures the
difference between BEM-computed and measured deformations at the measuring points.
Since the governing equation for the elasticity problem is the Navier equation without
body forces, the fictitious point loads must be located outside the problem domain, that is,
outside the exposed bounding surface or within the subsurface cavities. As such, the first
iteration process searches for locations and strengths of the fictitious point loads until
a match is found between the tractions and deformations computed by the BEM and those
measured on the boundary as additional information or over-specified conditions. This is
achieved by the minimization of an objective function:
vffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
u
Nm
u 1 X
l l
2
ð6Þ
jum b
um
S1 ðQi , xi Þ ¼ t
i j :
Nm m¼1 i
The objective function S1 quantifies the difference between the deformations ui obtained
by BEM (Equation 5) and measured deformations b
ui providing the additional
information obtained through experimental measurements on the exposed boundaries,
see Divo et al. [7], Ulrich et al. [8], Kassab et al. [9,10]. Here, Nm denotes the number of
boundary deformation measurements and l ¼ 1, . . . , L denotes the number of point loads
used to simulate the presence of a cavity. It is important to mention that the
BEM-computed deformations ui are a direct function of the parameters that define
the strength ðQli Þ and location ðxli Þ of the point loads.
Once a maximum number of iterations have been performed where the first objective
function S1 does not further change, a second stage of the process is started by defining
a second objective function as:
vffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
u
Nt
u1 X
n
ð7Þ
jtm j2 :
S2 ðxi Þ ¼ t
Nt m¼1 i
The objective function S2 is minimized to establish the cavity(ies) location(s) indicated as
traction-free surface(s). Here, xi are the points that define the simulated cavity around the
cluster of point loads and Nt is the number of points on this curve at which tractions ti are
calculated. A GA is employed to solve both minimization problems and it is parallelized
and dynamically balanced.
5. Genetic algorithms optimization
The GA used for this optimization process models the objective function as a haploid
with a binary vector to model a single chromosome, see [7,32,33]. The length of the vector is
dictated by the number of design variables and the required precision of each design
variable. Each design variable has to be bounded with a minimum and a maximum value,
and in the process the precision of the variable is determined. This procedure allows an easy
mapping from real numbers to binary strings and vice versa. This coding process
represented by a binary string is one of the distinguishing features of GA and differentiates
them from other evolutionary approaches. The haploid GA places all design variables into
one binary string, called a chromosome or offspring. The GA optimization process begins
by setting a random set of possible solutions. Each individual is defined by a combination of
parameters. That is, the strength of the point loads ðQli Þ and the location of each point load
Downloaded By: [Cerrolaza, Miguel][Consorci de Biblioteques Universitaries de Catalunya] At: 17:37 13 December 2010
986
D. Ojeda et al.
ðxli Þ. An efficient way of parametrizing the location of the point loads to minimize the
number of search variables is by requiring them to be arranged in a predefined shape. In this
case, a rotated ellipse is employed to arrange the l ¼ 1, . . . , L point loads. The ellipse is
centred at (xc, yc) with radii (rx, ry) and inclination (). All of these search variables
ðQli , xc , yc , rx , ry , Þ are represented as a bit string or chromosome and are bounded by limits
that prevent the cluster of point loads to move away from the domain of analysis. However,
it is important to mention that should a point load cluster be released to search for a nonexisting cavity, the cluster will automatically collapse, vanish, or move outside the geometry
during the optimization process.
Since GA are used to maximize and not minimize, a fitness function is formulated
as the inverse of the objective function as:
"
#ð1=2Þ
Nm 2
1 X
l l
1
m
m
u u^ ð8Þ
:
Z1 ðQi , xi Þ ¼ S1 ¼
i
Nm m¼1 i
This fitness function Z1 is evaluated for every individual in the current population defining
their probability of survival. A series of parameters are initially set in the GA code, and
these determine and affect the performance of the genetic optimization process.
The same approach is followed for the second objective function for which a second
fitness function is defined as its inverse as:
"
#ð1=2Þ
Nt
X
1
ð9Þ
jtm j2
:
Z2 ðxni Þ ¼ S1
2 ¼
Nt m¼1 i
In this case, the search variables xi that define the shape of the cavity curve around the
point load cluster is also parametrized as a rotated ellipse centred at (xc2, yc2) with radii
(rx2, ry2) and inclination (2) in order to minimize the search space dimensions. All of these
search variables (xc2, yc2, rx2, ry2, 2) are represented as a bit string or chromosome and are
bounded by limits that ensure the line to be outside the point load cluster. This particular
parameterization of the cavity shape as a rotated ellipse is by no means general and is
simply used as an illustration of the adaptability of the method for the cases studied herein.
More general shapes can be conceived where the curve is defined by polar-ray
configurations or b-splines to capture more intricate geometries. In addition, the
minimization of the second objective function may be easily generalized for cases where
the cavity surface is not necessarily traction-free but for instances where an internal
pressure or inclusion load is specified. Moreover, the approach lends itself naturally for
extensions to three-dimensional problems where the computational advantage of not
having to re-mesh during the iteration process is even more pronounced.
6. Examples
The first example considers a 0.0635 0.0635 m2 square section with a 0.0254 m
diameter-centred hole as shown in Figure 3. The section is made of steel with shear
modulus of 60 GPa and a Poisson’s ratio of 0.3. Two different cavities are searched in
two different runs under the same compression conditions. The first cavity has a diameter
of 0.005 m and is located on the top of the section. The second cavity has
a diameter of 0.00674 m and is located on the right-hand side of the section.
987
Inverse Problems in Science and Engineering
(a)
(b)
s = 1x106 Pa
s = 1x106 Pa
0,0054m
R0,00337m
R0,0025m
0,03m
0,0254m
s = 1x106 Pa
s = 1x106 Pa
Downloaded By: [Cerrolaza, Miguel][Consorci de Biblioteques Universitaries de Catalunya] At: 17:37 13 December 2010
0,0115m
0,0254m
0,032m
s = 1x106 Pa
s = 1x106 Pa
Figure 3. Geometry and conditions for square section with centred-circular hole. (a) Top cavity
case; (b) Right-hand cavity case.
Figure 4. Discretization of square section with centred-hole cases. (a) Top cavity case;
(b) Right-hand cavity case.
The section is clamped on the left-hand side and the other sides are imposed with 106 Pa
uniform compression loads. The two cases are discretized with 80 and 40 quadratic
discontinuous isoparametric boundary elements for the square and centred-hole
boundaries, respectively, see Figure 4.
The direct problem is solved for both the top cavity and the right-hand
cavity cases. The displacement magnitude contours for both cases are displayed in
Figure 5. The BEM-computed displacements on the bottom, right-hand and top
boundaries are ladened with a random error of SD 1 108 m to simulate measurement
errors, and then used as input for the inverse cavity detection analyses with a number of
measurements Nm ¼ 60. A total of L ¼ 4 point loads were employed to simulate the cavity
during the first stage of the optimization processes while Nt ¼ 8 points around the defined
988
D. Ojeda et al.
(b)
|U|
3.62E–07
3.36E–07
3.10E–07
2.85E–07
2.59E–07
2.34E–07
2.08E–07
1.83E–07
1.57E–07
1.31E–07
1.06E–07
8.04E–08
5.48E–08
2.92E–08
3.65E–09
|U|
3.62E–07
3.36E–07
3.10E–07
2.85E–07
2.59E–07
2.34E–07
2.08E–07
1.83E–07
1.57E–07
1.31E–07
1.06E–07
8.04E–08
5.48E–08
2.92E–08
3.65E–09
Figure 5. Displacement contours of square section with centred-hole cases. (a) Top cavity case;
(b) Right-hand cavity case.
(a)
(b)
0.04
Objective function
Objective function
Downloaded By: [Cerrolaza, Miguel][Consorci de Biblioteques Universitaries de Catalunya] At: 17:37 13 December 2010
(a)
0.03
0.02
0.01
0.00
0
500
1000
Generation
1500
2000
0.55
0.5
0.45
0.4
0.35
0.3
25
50
75
100
Generation
Figure 6. Evolution of the objective function for the square section with centred-hole case with the
top cavity. (a) Evolution of objective function S1; (b) Evolution of objective function S2.
cluster of point loads were used to calculate the tractions during the second stage of the
optimization processes.
Plots of the objective functions S1 and S2 evolution over the optimization process are
displayed in Figure 6 for the top cavity case and in Figure 7 for the right-hand cavity case.
The prediction of the cavity location (indicated by the dashed line) along with the location
of the point loads (indicated by small circles) is displayed for the top cavity and right-hand
cavity cases in Figure 8 revealing excellent agreement between the exact and predicted
cavity locations.
The second example shows a cross-section of the cortical bone of an adult femur.
The section is roughly 4 cm in average diameter with a medullar cavity of around 2.5 cm
in average diameter. The exact geometric configuration can be seen in Figure 9. The bone
is assumed to be homogeneous and isotropic throughout the cross-section with a shear
modulus of 3.3 GPa and a Poisson’s ratio of 0.31. A small 2.5 mm cavity located on
the bottom-right area of the cross-section is sought by loading the bone under
normal compression of 107 Pa from the right-hand side and clamping it on the
left-hand side. The problem is discretized with 108 quadratic discontinuous isoparametric
boundary elements.
989
Inverse Problems in Science and Engineering
(b) 1.5
1.4
1.3
1.2
1.1
1
0.9
0.8
0.7
0.6
Downloaded By: [Cerrolaza, Miguel][Consorci de Biblioteques Universitaries de Catalunya] At: 17:37 13 December 2010
0.03
Objetive function
Objetive function
(a) 0.04
0.02
0.01
0
0
1000
2000
3000
Generation
4000
20
40
60
Generation
80
Figure 7. Evolution of the objective function for the square section with centred-hole case with the
right-hand cavity. (a) Evolution of objective function S1; (b) Evolution of objective function S2.
Figure 8. Cavity prediction after 2000 generations of the optimization process for the square section
with centred-hole cases. (a) Top cavity case; (b) Right-hand cavity case.
s = 107Pa
Figure 9. Geometry and boundary conditions for the femur cross-section case.
D. Ojeda et al.
|U|
0.00125
0.001125
0.001
0.000875
0.00075
0.000625
0.0005
0.000375
0.00025
0.000125
0
Figure 10. Displacement contours for the femur cross-section case.
0.02
0.018
0.016
0.014
0.012
0.01
0.008
0.006
0.004
0.002
0
(b) 0.14
Objective function
(a)
Objective function
Downloaded By: [Cerrolaza, Miguel][Consorci de Biblioteques Universitaries de Catalunya] At: 17:37 13 December 2010
990
0.13
0.12
0.11
0.1
0.09
100
200
300
Generation
400
500
5
10
Generation
15
20
Figure 11. Evolution of the objective function for the femur cross-section case. (a) evolution of
objective function S1; (b) evolution of objective function S2.
The direct problem is solved and the displacement contours are displayed in Figure 10.
The displacements obtained from the direct solution are ladened with a random error of
SD 1 105 m and used as input for the inverse problem. The number of measurements
employed in the optimization process is Nm ¼ 25. A total of L ¼ 4 point loads were
employed to simulate the cavity during the first stage of the optimization processes while
Nt ¼ 8 points around the defined cluster of point loads were used to calculate the tractions
during the second stage of the optimization processes.
Plots of the objective functions, S1 and S2, evolution over the optimization process are
displayed in Figure 11. The prediction of the cavity location (indicated by the dashed line)
along with the location of the point loads (indicated by the small circles) is displayed
in Figure 12 again revealing excellent agreement between the exact and predicted
cavity location.
Downloaded By: [Cerrolaza, Miguel][Consorci de Biblioteques Universitaries de Catalunya] At: 17:37 13 December 2010
Inverse Problems in Science and Engineering
991
Figure 12. Cavity prediction after 500 generations of the optimization process for the femur
cross-section cases.
7. Conclusions
A method for the efficient solution of the inverse optimization problem of cavity detection
using a point load superposition technique in elastostatics BEM is developed in this article.
Numerical examples in regular and irregular geometries demonstrate the ability of the
method to successfully locate cavities in terms of their locations and size whilst using
inputs ladened with simulated random error. The GA has been integrated as an
optimization tool using BEM. The technique is readily applicable to the closely related
problem of shape optimization, in which the condition at the cavity side may be arbitrarily
specified as a design target.
Acknowledgements
The work undertaken in this project was carried out under the institutional and financial support
provided by the University of Central Florida (USA), the University of Carabobo (Venezuela) and
FONACIT (Venezuela).
References
[1] S.R. Kennon and G.S. Dulikravich, Inverse design of multiholed internally cooled turbine blades,
Int. J. Numer. Methods Eng. 22 (1986), pp. 363–375.
[2] S. Kubo, Inverse problems related to the mechanics and fracture of solids and structures, JSME Int.
J. 31 (1988), pp. 157–166.
[3] J.C. Krapez and P. Cielo, Thermographic nondestructive evaluation: data inversion procedures,
Part I: 1-D Analysis, Res. Nondestr. Eval. 3 (1991), pp. 81–100.
[4] J.C. Krapez, X. Maldague, and P. Cielo, Thermographic nondestructive evaluation: data inversion
procedures, Part II: 2-D Analysis, Res. Nondestr. Eval. 3 (1991), pp. 101–124.
[5] G.S. Dulikravich and B. Kosovic, Minimization of the number of cooling holes in internally cooled
turbine blades, Int. J. Turbo Jet Eng. 9 (1992), pp. 226–283.
Downloaded By: [Cerrolaza, Miguel][Consorci de Biblioteques Universitaries de Catalunya] At: 17:37 13 December 2010
992
D. Ojeda et al.
[6] X. Maldague, Non Destructive Evaluation of Materials by Infrared Thermography,
Springer-Verlag, New York, 1992.
[7] E.A. Divo, A.J. Kassab, and F. Rodrı́guez, An efficient singular superposition technique for
cavity detection and shape optimization, Numer. Heat Transfer, Part B, Taylor & Francis 46
(2004), pp. 1–30.
[8] T.W. Ulrich, F.A. Moslehy, and A.J. Kassab, A BEM based pattern search solution for a class of
inverse elastostatic problems, Int. J. Solids Struc. 33(15) (1996), pp. 2123–2131.
[9] A.J. Kassab, F.A. Moslehy, and A.B. Daryapurkar, Nondestructive detection of cavities
by an inverse elastostatics boundary element method, J. Eng. Anal. Bound. Elem. 13 (1994),
pp. 45–55.
[10] A.J. Kassab, F.A. Moslehy, and T.W. Ulrich, Inverse boundary element solution for locating
subsurface cavities in thermal and elastostatic problems, in Proc. IABEM-95, Computational
Mechanics ‘95, S.N. Atluri, G. Yagawa, and T.A. Cruse, eds., Springer, Berlin, Hawaii, 1995,
pp. 3024–3029, July 30–August 3.
[11] N.M. Ozisik and H. Orlande, Inverse Heat Transfer, Taylor & Francis, New York, 2001.
[12] K. Kurpisz and A. Nowak, Inverse Thermal Problems, Computational Mechanics Publications,
Southampton and Boston, 1995.
[13] M. Bonnet, R. Burczynski, and M. Nowakowski, Sensitivity analysis for shape perturbation of
cavity or internal crack using BIE and adjoint variable approach, Int. J. Solids Struct. 39 (2002),
pp. 2365–2385.
[14] T. Burczynski and W. Beluch, The identification of cracks using boundary elements and
evolutionary algorithms, J. Eng. Anal. Bound. Elem. 25 (2001), pp. 313–322.
[15] R. Bialecki, E. Divo, and A. Kassab, Reconstruction of time-dependent boundary heat flux by
a BEM-based inverse algorithm, J. Eng. Anal. Bound. Elem. 30 (2006), pp. 767–773.
[16] E.A. Divo and A.J. Kassab, A meshless method for conjugate heat transfer problems, J. Eng.
Anal. Bound. Elem. 29 (2005), pp. 136–149.
[17] E.A. Divo, A.J. Kassab, and M.S. Ingber, Shape optimization of acoustic scattering bodies,
J. Eng. Anal. Bound. Elem. 27 (2003), pp. 695–703.
[18] E.A. Divo, A.J. Kassab, J.S. Kapat, and M.K. Chyu, Retrieval of multidimensional heat transfer
co-efficent distributions using an inverse BEM-based regularized algorithm: numerical and
experimental results, J. Eng. Anal. Bound. Elem. 29 (2005), pp. 150–160.
[19] S.C. Mellings and M.H. Aliabiadi, in Crack Identification using Inverse Analysis, in Boundary
Elements XV, Vol. 2, C.A. Brebbia and J.J. Rencis, eds., Computational Mechanics
Publications, Boston, 1993, pp. 387–398.
[20] S.C. Mellings and M.H. Aliabadi, Three-dimensional flaw identification using inverse analysis,
Int. J. Eng. Sci. 34(84) (1996), pp. 453–469.
[21] G. Rus and R. Gallego, Optimization algorithms for identification inverse problems with the
boundary element method, J. Eng. Anal. Bound. Elem. 26 (2002), pp. 315–327.
[22] R. Gallego and G. Rus, Identification of cracks and cavities using the topological boundary
integral equation, Comp. Mech. 33 (2004), pp. 154–163.
[23] L. Marin, Detection of cavities in Helmholtz-type equations using the boundary element method,
J. Compu. Method. Appl. Mech. Eng. 194 (2005), pp. 4006–4023.
[24] M. Cerrolaza, W. Annicchiarico, and M. Martinez, Optimization of 2D boundary
element models using B-splines and genetic algorithms, Eng. Anal. Bound. Elem 24(5) (2000),
pp. 427–440.
[25] C. Müller-Karger, C. González, M.H. Alibadi, and M. Cerrolaza, Three dimensional BEM and
FEM stress analysis of the human tibia under pathological conditions, J. Comp. Mod. Eng. Sci.
2(1) (2001), pp. 1–13.
[26] W. Annicchiarico and M. Cerrolaza, An evolutionary approach for the shape optimization of
general boundary elements models, Electron. J. Bound. Elem. 2 (2002), pp. 251–266.
Downloaded By: [Cerrolaza, Miguel][Consorci de Biblioteques Universitaries de Catalunya] At: 17:37 13 December 2010
Inverse Problems in Science and Engineering
993
[27] W. Annicchiarico and M. Cerrolaza, A 3D boundary element optimization approach
based on genetic algorithms and surface modeling, Eng. Anal. Bound. Elem. 28(11) (2004),
pp. 1351–1361.
[28] W. Annicchiarico, G. Martı́nez, and M. Cerrolaza, Boundary elements and B-spline modeling for
medical applications, J. App. Math. Mod. 31(2) (2005), pp. 194–208.
[29] G. Martı́nez and M. Cerrolaza, A bone adaptation integrated approach using BEM, J. Eng. Anal.
Bound. Elem. 30 (2006), pp. 107–115.
[30] C.A. Brebbia and J. Dominguez, Boundary element, An introductory course, Computational
mechanics Publ, Boston, (co-published with McGraw-Hill, New York), 1989, pp. 134–250.
[31] J.H. Kane, Boundary Element Analysis in Engineering Continuum Mechanics, Prentice Hall,
Englewood Cliffs, New Jersey, 1994, p. 07632.
[32] D. Goldberg and J. Richarson, Genetic algorithms with sharing for multimodal function
optimization, Proceedings of the Second International Conference on Genetic Algorithms and
Their Applications, 1987, pp. 41–49.
[33] D. Goldberg, Genetic Algorithms in Search, Optimization, and Machine Learning,
Addison-Wesley, Reading, MA, 1989.