Sensores PIR y Contactores: Automatización Industrial
Anuncio

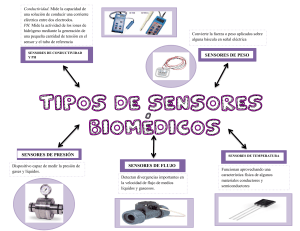
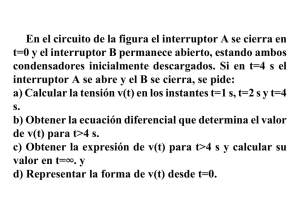
UNIVERSIDAD NACIONAL DEL CALLAO Facultad de Ingeniería Eléctrica y Electrónica AUTOMATISMO Y CONTROL DE PROCESOS INDUSTRIALES CICLO: 2021B TÍTULO: SENSORES PIR Y CONTACTORES DOCENTE: GUTIÉRREZ TOCAS VÍCTOR LEÓN ALUMNO: JARA RENGIFO AXEL DANIEL 1713120427 G.H: 01T / 90GA PERÚ 2021 1 Sensores PIR y Contactores 1. Objetivos................................................................................................................ 3 2. Fundamento Teórico .............................................................................................. 3 Sensor Eléctrico ........................................................................................................ 3 Tipos de Sensores ................................................................................................. 4 Contactor .................................................................................................................. 4 Constitución de un Contactor Eléctrico .................................................................. 4 Interruptor Termomagnético ...................................................................................... 5 Relé Térmico ............................................................................................................. 6 Sensores PIR ............................................................................................................ 6 3. Procedimiento ........................................................................................................ 7 4. Conclusiones y Recomendaciones ...................................................................... 10 5. Bibliografía........................................................................................................... 10 2 1. Objetivos Reconocer y analizar los actuadores y sensores eléctricos usados. Simular el circuito de mando de dos cilindros neumáticos (A y B) de modo que al pulsar “Marcha” se realice la siguiente secuencia: A+ B+ B- A- A+ B+ B- AA+ B+ B- A- ... y sigue en forma continua y solo se detiene al pulsar “Pare” en el software FLUIDSIM. 2. Fundamento Teórico Sensor Eléctrico Un sensor eléctrico es un dispositivo que transforma una cantidad física (temperatura, posición, intensidad de la luz, etc.) en una cantidad eléctrica (a menudo un voltaje) que luego puede integrarse en una cadena de procesamiento de señales. Un sensor, también llamado detector, transductor o sonda, convierte los parámetros que no son eléctricos en información que se puede evaluar eléctricamente mediante tensiones y/o intensidades. La curva de calibración del sensor es la curva que da la evolución de la cantidad eléctrica característica del sensor en función de la cantidad física a la que es sensible el sensor. El sensor registra las cantidades físicas y las convierte con convertidores de algún tipo según la magnitud y que veremos más adelante, en un voltaje eléctrico, que el sensor establece en una relación fija con la cantidad recogida de entrada. Por lo tanto, un sensor escala las señales para que puedan interpretarse para su procesamiento posterior. 3 Tipos de Sensores Los sensores se dividen en sensores mecánicos y no mecánicos. El primer grupo incluye los de posición, inclinación, aproximación, vibración, fuerza y presión. Los sensores no mecánicos incluyen la temperatura y la luz sensores, sensores de campo magnético, sensores capacitivos, y sensores químicos. La transformación o conversión de la magnitud física en eléctrica suele ser de 3 tipos: - La conversión de una temperatura en un valor de resistencia eléctrica por medio de una resistencia térmica. - La conversión de una intensidad de luz en corriente eléctrica mediante un fotodiodo. - La conversión de presión mecánica en carga eléctrica por medio de un cristal piezoeléctrico. Figura 1 “Sensores Eléctricos” Contactor Es un dispositivo eléctrico que opera a grandes frecuencias teniendo capacidad de abrir y cerrar un circuito eléctrico gracias a su constitución además de las funciones que cumplen, debido a cierta flexibilidad del dispositivo es posible poder controlarlo a grandes distancias siendo un dispositivo fundamental para el proceso de arranque de motores en automatización. Constitución de un Contactor Eléctrico Contactos principales. Son los destinados a abrir y cerrar el circuito de potencia. Están abiertos en reposo. Contactos auxiliares. Son los encargados de abrir y cerrar el circuito de mando. Están acoplados mecánicamente a los contactos principales y pueden ser abiertos o cerrados. 4 Bobina. Elemento que produce una fuerza de atracción (FA) al ser atravesado por una corriente eléctrica. Su tensión de alimentación puede ser de 12, 24 y 220V de corriente alterna, siendo la de 220V la más usual. Armadura. Parte móvil del contactor. Desplaza los contactos principales y auxiliares por la acción (FA) de la bobina. Núcleo. Parte fija por la que se cierra el flujo magnético producido por la bobina. Resorte. Es un muelle encargado de devolver los contactos a su posición de reposo una vez cesa la fuerza FA. Figura 2 “Contactor” Interruptor Termomagnético Un interruptor magnetotérmico, interruptor termomagnético, llave térmica o breaker, es un dispositivo capaz de interrumpir la corriente eléctrica de un circuito cuando esta sobrepasa ciertos valores máximos. Su funcionamiento se basa en dos de los efectos producidos por la circulación de corriente en un circuito: el magnético (ley de Ampere) y el térmico (efecto Joule). El dispositivo consta, por tanto, de dos partes, un electroimán y una lámina bimetálica, conectadas en serie y por las que circula la corriente que va hacia la carga. Figura 3 “ITM” 5 Relé Térmico Se trata de un dispositivo electromecánico, diseñado para proteger a los motores eléctricos. Procura dar durabilidad a los motores industriales, cuidando a estos últimos de sobrecargas o calentamientos. Si bien existen diversos aparatos, todos cumplen idéntica función, al ser pensados para prolongar la vida útil de los motores. Están compuestos por una lámina bimetálica, con diferentes coeficientes de dilatación. Así, tal como decíamos anteriormente, un relé térmico se compone de dos láminas de diferentes metales, hierro, níquel y lata. Dichas láminas se encuentran unidas por una soldadura o remache, y presentan diferentes coeficientes de dilatación. Al encender el motor se energiza la bobina magnética y el motor comienza a funcionar. Al recibir la corriente, tanto la resistencia de calentamiento como la lámina bimetálica del motor se calientan. Ante un paso normal de corriente la dilatación de la lámina es mínima y permite el normal funcionamiento del motor. Pero al ocurrir una sobrecarga, o se evidencian fallos o diferencias de carga en alguna de las fases, comienza a activarse el relé. Así, la lámina se curvará hacia arriba y desplazará una placa de fibra. Esto liberará la palanca que abre los contactos de la bobina magnética, desconectará el circuito y parará el motor. De esta manera, se evitará que el bobinado del motor se queme. Figura 4 “Relé Térmico” Sensores PIR Son aquellos sensores detectores de movimientos que se encarga de medir los cambios de niveles infrarrojos (calor) de aquellos objetos que se encuentran cercanos y emiten calor. 6 3. Procedimiento Comenzamos realizando el circuito de Fuerza para el cilindro A y B utilizando los siguientes elementos: Cilindro doble efecto Regla Válvula antiretorno estrangulable Válvula de 5/2 vías Fuente de aire comprimido Figura 5 “Circuitos de Fuerza de los cilindros A y B” Luego procedemos a realizar el circuito de mando y se utilizarán los siguientes componentes: Pulsador (Obturador) Pulsador (Franqueador) Relé Solenoide de válvula Interruptor de alimentación magnética Contacto obturador Contacto franqueador 7 Figura 6 “Circuito de mando” Empezamos a simular el funcionamiento de los circuitos de fuerza de A y B respectivamente y el circuito de mando Figura 7 “Circuito de fuerza cilindro A” 8 Figura 8 “Circuito de fuerza cilindro B” Figura 9 “Simulación Circuito de mando” 9 4. Conclusiones y Recomendaciones Debemos tener en cuenta la secuencia lógica de los cilindros para realizar la simulación del diagrama. Verificar cada elemento en el diagrama de control para evitar errores de simulación. Se debe manejar las mismas nomenclaturas de cada componente y su determinado dispositivo de maniobra para no tener problemas con las posteriores simulaciones. 5. Bibliografía https://areatecnologia.com/electricidad/sensores-electricos.html https://es.wikipedia.org/wiki/Interruptor_magnetot%C3%A9rmico https://es.wikipedia.org/wiki/Contactor#:~:text=Un%20contactor%20es%20un% 20elemento,por%20la%20cual%20circula%20una https://www.transelec.com.ar/soporte/18413/-que-es-un-rele-termico-/ 10