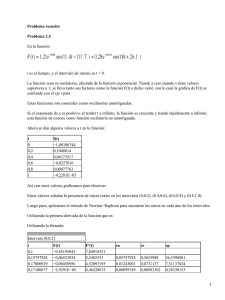
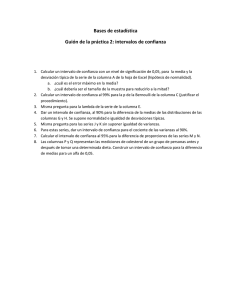
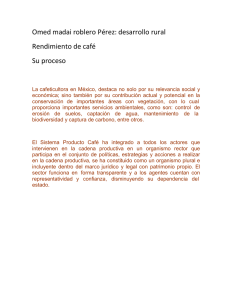
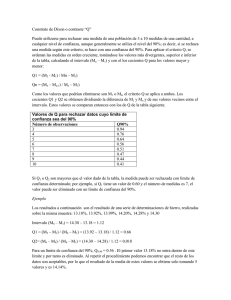
SEÑALES & SISTEMAS SISTEMAS LINEALES E INVARIENTES EN EL TIEMPO: CONVOLUCIÓN EN TIEMPO CONTINUO PASOS PARA EL DESARROLLO DE LA CONVOLUCIÓN EN TIEMPO CONTINUO 1. Cambio de variable t τ 2. La respuesta el impulso h(τ) es invertida en el tiempo es decir h(-τ) y luego desplazada por t para formar h(t - τ) , la cual es una función de τ con parámetro t 3. La señal x(τ) y la respuesta al impulso h(t - τ) , se multiplican para todos los valores de τ con t fijo en algún valor 4. El producto x(τ) h(t - τ) es integrado en τ para producir un solo valor de salida y(t) 5. Los pasos 2 a 4 se repiten conforme t varia de -∞ a ∞ para producir un solo valor de salida y(t) Importante tener siempre presente que x(τ) h(t - τ) se integran respecto a τ y no respecto a t, t es una constante respecto a τ EJEMPLO 1 Sea un sistema LTI cuya entrada esta definida por x(t) y su respuesta al impulso es h(t), determine la salida de y(t) de dicho sistema, mediante convolución h(t) x(t) 4 2 t 1 2 3 t -1 1 2 ∞ 𝑦 𝑡 = 𝑥 𝑡 ∗ℎ 𝑡 = 𝑥 𝜏 ℎ 𝑡 − 𝜏 𝑑𝜏 −∞ 𝑥 𝑡 →𝑥 𝜏 ℎ 𝑡 → ℎ(𝑡 − 𝜏) h(-𝜏) 4 -2 -1 1 2 𝜏 1 Intervalo y(t) 4 2 t-2 𝒚𝟏(𝒕) = t+1 𝟎 ; −∞ < 𝒕 < 𝟎 1 2 3 t 2 Intervalo y(t) 4 2 1 t-2 𝒕+𝟏 𝒚𝟐(𝒕) = 𝒙 𝝉 𝒉 𝒕 − 𝝉 𝒅𝝉 = 𝟐 𝟒 𝒅𝝉 𝟏 𝒕+𝟏 = 𝟖 𝒅𝝉 𝟏 = 3 t+1 𝒕+𝟏 𝟏 𝒚𝟐 𝒕 2 t 𝟖 𝒕+𝟏−𝟏 𝒚𝟐 𝒕 = 𝟖𝒕 ; 𝟎≤𝒕<𝟐 3 Intervalo y(t) 4 2 1 2 3 t-2 t+1 𝟑 𝒚𝟑 𝒕 = 𝟖𝒅𝝉 = 𝟖 𝟑−𝟏 𝟏 𝒚𝟑 𝒕 = 𝟏𝟔 ; 𝟐 ≤𝒕<𝟑 t = 𝟏𝟔 4 Intervalo y(t) 4 2 1 2 3 t-2 𝟑 𝒚𝟒 𝒕 = 𝟖 𝒅𝝉 = 𝟖(𝟑 − 𝒕 − 𝟐 ) 𝒕−𝟐 𝒚𝟒 𝒕 = 𝟖 𝟓−𝒕 ; 𝟑≤𝒕<𝟓 t t+1 5 Intervalo y(t) 4 2 1 𝒚𝟓 𝒕 = 𝟎 ; 𝟓 ≤ 𝒕 <∞ 2 3 t-2 t+1 t 𝟎 y(t) = ; −∞ < 𝒕 < 𝟎 𝟖𝒕 ; 𝟎≤𝒕<𝟐 𝟏𝟔 𝟐 ≤𝒕<𝟑 ; 𝟖 𝟓−𝒕 𝟎 ; ; y(t) 16 𝟑≤𝒕<𝟓 𝟓 ≤ 𝒕 <∞ 8 1 2 3 4 5 t EJEMPLO 2 Sea un sistema LTI cuya entrada esta definida por x(t) y su respuesta al impulso es h(t), determine la salida de y(t) de dicho sistema, mediante convolución h(t) x(t) 1 1 t -to to t -to to ∞ 𝑦 𝑡 = 𝑥 𝑡 ∗ℎ 𝑡 = 𝑥 𝜏 ℎ 𝑡 − 𝜏 𝑑𝜏 −∞ - Hago cambio de variable t 𝝉 - Reflejo y desplazo x(𝝉) - Como x(𝝉) es señal par - Defino intervalos. x(𝝉) = x(−𝝉) 1 Intervalo y(t) 1 t -to +t 𝒚𝟏 𝒕 to +t = 𝟎 -to to − ∞ < 𝒕 < −𝟐𝒕𝒐 2 Intervalo y(t) 1 t -to +t -to to +t to 𝒙 𝒕 − 𝝉 = 𝜹 (𝒕𝒐 + 𝒕 − 𝝉) Se Observa que la señal x(t- 𝝉) es un impulso desplazado Para resolver la integral aplicamos las propiedades del impulso Propiedades del impulso unitario Producto 𝑥 𝑡 𝛿 𝑡 − 𝛼 = 𝑥 𝛼 𝛿(𝑡 − 𝛼) Filtrado 𝑏 𝑥 𝑡 𝛿 𝑡 − 𝛼 𝑑𝑡 = 𝑥 𝛼 , 𝑎 Escalamiento 𝛿 𝛼𝑡 = 1 𝛿(𝑡) 𝛼 𝑎 < 𝛼 < 𝑏 , 0 𝑜𝑡𝑟𝑜 𝑣𝑎𝑙𝑜𝑟 2 Intervalo y(t) 1 t -to +t -to to +t to Aplicando la propiedad de filtrado ∞ 𝑦2 𝑡 = ℎ 𝜏 𝛿 𝑡𝑜 + 𝑡 − 𝜏 𝑑𝜏 −∞ 𝒚𝟐 𝒕 = 𝒉 𝒕 + 𝒕𝒐 ; −𝟐𝒕𝟎 < 𝒕 < 𝟎 3 Intervalo y(t) 1 t -to -to +t to to +t ∞ ∞ 𝑦3 𝑡 = ℎ 𝜏 𝛿 𝑡 − 𝑡𝑜 − 𝜏 𝑑𝜏 −∞ 𝑦3 𝑡 = ℎ 𝜏 𝛿 𝑡 − 𝑡𝑜 − 𝜏 𝑑𝜏 −∞ 𝒚𝟑 𝒕 = 𝒉 𝒕 − 𝒕𝒐 ; 𝟎 < 𝒕 < 𝟐𝒕𝒐 4 Intervalo y(t) 1 t -2to -to to 2t0 4 Intervalo y(t) 1 t -to to -to +t 𝒚𝟒 𝒕 = 𝟎; to +t 𝟐𝒕𝒐 < 𝒕 < ∞ Ejemplo 4 Determine la convolución de: h(t) x(t) 1 1 -1 -1 1 1. Paso cambio de variable 2. Reflejo y desplazo x(τ); como la señal es par queda igual 3. Realizo la convolución, para cada intervalo en donde las señales se traslapan 1 -1 Ejemplo 4 Determine la convolución de: h(τ) x(-τ) 1 1 -1 -1 1 -1 1 h(τ) 1 1 Intervalo 1 Y1 = 0 ; -∞ < -2 t -1 t+1 -1 1 -1 h(τ) 2 Intervalo 𝑡+1 1 𝑦2 = 1 1 −1 𝑑𝜏 −1 𝑦2 = −𝑡 − 2 ; −2 < 𝑡 < −1 t -1 -1 t+1 1 -1 h(τ) 3 Intervalo 1 1 0 𝑦3 = 𝑡+1 1 −1 𝑑𝜏 + −1 𝑦3 = 𝑡; −1 < 𝑡 <0 t -1 -1 t+1 1 -1 1 𝑑𝜏 0 h(τ) 4 Intervalo 0 1 1 1 𝑦4 = 1 −1 𝑑𝜏 + 𝑡−1 𝑦4 = 𝑡; 0 < 𝑡 <1 -1 t -1 1 t+1 -1 h(τ) 5 Intervalo 1 1 1 𝑦5 = 1 𝑑𝜏 𝑡−1 𝑦5 = 1 − t − 1 -1 t -1 1 -1 t+1 𝑦5 = 2 − 𝑡; 1 < 𝑡 <2 1 𝑑𝜏 0 h(τ) 1 1 -1 1 -1 6 Intervalo 𝑦6 = 0; 2 < 𝑡 < ∞ t -1 t+1 Ejercicio + 0,2 Demostrar la propiedad distributiva de la convolución el ejemplo 1 Ejercicio + 0,2 Determine la convolución de: h(t) x(t) 3 1 -1 1 3 h(τ) x(τ) 3 1 -1 3 1 h(-τ) 3 -3 x(τ) 1 t-3 𝑦1 = 0 , t -1 1 −∞ < 𝑡 < −1 𝑡 1 t-3 -1 t 1 𝑦2 = 1 𝑡 − 𝜏 𝑑𝜏 −1 ; −1 < 𝑡 < 1 1 t-3 -1 1 t 1 𝑦3 = 1 𝑡 − 𝜏 𝑑𝜏 ; 1<𝑡<2 −1 1 t-3 -1 1 t 1 𝑦4 = 1 𝑡 − 𝜏 𝑑𝜏 𝑡−3 ; 2<𝑡<4