ROBOTICS
Manual del operador
Solución de problemas de IRC5
Trace back information:
Workspace R18-2 version a12
Checked in 2018-10-16
Skribenta version 5.3.008
Manual del operador
Solución de problemas de IRC5
RobotWare 6.08
ID de documento: 3HAC020738-005
Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
Las especificaciones están sujetas a cambios sin previo aviso.
La información de este manual puede cambiar sin previo aviso y no puede entenderse
como un compromiso por parte de ABB. ABB no se hace responsable de ningún
error que pueda aparecer en este manual.
Excepto en los casos en que se indica expresamente en este manual, ninguna parte
del mismo debe entenderse como una garantía por parte de ABB por las pérdidas,
lesiones, daños materiales, idoneidad para un fin determinado ni garantías similares.
ABB no será en ningún caso responsable de los daños accidentales o consecuentes
que se produzcan como consecuencia del uso de este manual o de los productos
descritos en el mismo.
Se prohíbe la reproducción o la copia de este manual o cualquiera de sus partes si
no se cuenta con una autorización escrita de ABB.
Guardar para futuras referencias.
Usted puede obtener copias adicionales de este manual a través de ABB.
Traducción del manual original.
© Copyright 2005-2018 ABB. Reservados todos los derechos.
Las especificaciones están sujetas a cambios sin previo aviso.
ABB AB, Robotics
Robotics and Motion
Se-721 68 Västerås
Suecia
Contenido
Contenido
Descripción general de este manual ...............................................................................................
1
2
Seguridad
11
1.1
1.2
1.3
1.4
1.5
1.6
1.7
11
13
19
23
24
26
28
28
29
31
4
Señales de seguridad del manual .........................................................................
Símbolos de seguridad de los adhesivos del producto .............................................
Símbolos de seguridad de los adhesivos del controlador ..........................................
Seguridad durante la solución de problemas ..........................................................
Normas aplicables .............................................................................................
Herramientas de seguridad .................................................................................
Seguridad en la solución de problemas .................................................................
1.7.1 Los robots que no tienen frenos de sujeción de ejes son potencialmente letales ..
1.7.2 Presencia de tensión en el interior del módulo de accionamiento .....................
1.7.3 Las piezas calientes pueden causar quemaduras ..........................................
Introducción a la solución de problemas
33
2.1
2.2
2.3
33
35
36
36
38
39
40
2.4
3
7
Visión general de la solución de problemas ............................................................
Conjunto de herramientas estándar ......................................................................
Sugerencias y trucos durante la solución de problemas ...........................................
2.3.1 Estrategias para la solución de problemas ...................................................
2.3.2 Trabaje de forma sistemática .....................................................................
2.3.3 Seguimiento del historial ..........................................................................
Preparación de un informe de errores ...................................................................
Solución de problemas por síntomas de fallo
43
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
3.10
3.11
3.12
3.13
3.14
3.15
3.16
43
45
46
48
50
52
53
54
55
56
57
59
61
62
64
66
Fallos durante la puesta en marcha ......................................................................
El controlador no responde .................................................................................
Bajo rendimiento en el controlador .......................................................................
Todos los LEDs del controlador están apagados .....................................................
Sin tensión en la toma de servicio ........................................................................
Problema al poner en marcha el FlexPendant .........................................................
Problema al conectar el FlexPendant al controlador .................................................
Mensajes de evento erráticos en el FlexPendant .....................................................
Problema al mover el robot .................................................................................
Fallo de regrabación de firmware .........................................................................
Exactitud de trayectoria poco uniforme .................................................................
Ruidos mecánicos o disonancia ...........................................................................
El manipulador se precipita al desconectar la alimentación .......................................
Problema al liberar los frenos del robot .................................................................
Errores intermitentes .........................................................................................
Cómo forzar el inicio de Boot Application ...............................................................
Resolución de problemas por unidades
67
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
4.10
4.11
4.12
67
69
70
71
72
75
77
79
81
87
92
94
Solución de problemas de los LED del controlador ..................................................
Solución de problemas de FlexPendant .................................................................
Solución de problemas de comunicaciones ............................................................
Solución de problemas de los buses de campo y las unidades de E/S ........................
Solución de problemas en la unidad informática .....................................................
Solución de problemas de la tarjeta de panel ..........................................................
Solución de problemas del sistema de accionamiento ..............................................
Solución de problemas del ordenador de ejes ........................................................
Solución de problemas de alimentación eléctrica del sistema ....................................
Solución de problemas de la tarjeta de distribución de alimentación eléctrica ...............
Solución de problemas de la tarjeta de interfaz de contactores ..................................
Solución de problemas de alimentación eléctrica de E/S del usuario ...........................
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5
Contenido
5
Solución de problemas con ayuda de los registros de eventos
5.1
5.2
5.3
5.4
5.5
5.6
5.7
5.8
5.9
5.10
5.11
5.12
5.13
5.14
6
97
Mensajes del registro de eventos .........................................................................
Cómo leer los mensajes del registro de eventos de RAPID .......................................
1 xxxx .............................................................................................................
2 xxxx .............................................................................................................
3 xxxx .............................................................................................................
4 xxxx .............................................................................................................
5 xxxx .............................................................................................................
7 xxxx .............................................................................................................
9 xxxx .............................................................................................................
11 xxxx ............................................................................................................
12 xxxx ............................................................................................................
13 xxxx ............................................................................................................
15 xxxx ............................................................................................................
17 xxxx ............................................................................................................
Diagramas de circuitos
97
98
100
129
172
232
350
397
440
489
585
588
630
631
633
6.1
Diagramas de circuitos ....................................................................................... 633
Índice
637
6
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
Descripción general de este manual
Descripción general de este manual
Acerca de este manual
Este manual contiene información, procedimientos y descripciones para la solución
de problemas de los sistemas de robot basados en el controlador IRC5.
Utilización
Este manual debe utilizarse siempre que el funcionamiento del robot se vea
interrumpido por un problema de funcionamiento, independientemente de si se
crea o no un mensaje en el registro de eventos de error.
¿A quién va destinado este manual?
Este manual está dirigido al personal siguiente:
•
Operadores de máquinas y robots cualificados para la realización de una
solución de problemas muy básica y la comunicación de cualquier incidencia
al personal de servicio técnico.
•
Programadores cualificados para escribir y modificar programas de RAPID.
•
Personal especializado en la solución de problemas, normalmente personal
de servicio técnico muy experimentado, cualificado para el aislamiento
metódico, el análisis y la corrección de averías en el sistema de robot.
Requisitos previos
El lector deberá:
•
Tener una amplia experiencia en la solución de problemas de maquinaria
electromecánica.
•
Tener un conocimiento profundo del funcionamiento del sistema de robot.
•
Estar familiarizado con la instalación de robot concreta que está afectada,
sus equipos circundantes y sus periféricos.
Referencias
Referencia:
ID de documento
Manual del producto - IRC5
IRC5 de diseño M2004
3HAC021313-005
Manual del producto - IRC5
IRC5 de diseño 14
3HAC047136-005
Manual del operador - Información de seguridad para emer- 3HAC027098-005
gencias
Manual del operador - Información general de seguridad
3HAC031045-005
Manual del operador - IRC5 con FlexPendant
3HAC050941-005
Manual del operador - RobotStudio
3HAC032104-005
Manual del operador - Procedimientos iniciales - IRC5 y Ro- 3HAC027097-005
botStudio
Manual de referencia técnica - Parámetros del sistema
3HAC050948-005
Manual de aplicaciones - MultiMove
3HAC050961-005
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
7
Descripción general de este manual
Continuación
La documentación del producto está disponible en varios idiomas.
Revisiones
Revisión
Descripción
-
Primera edición.
A
Se ha añadido información.
Documento reestructurado en parte.
B
Cambiada la información sobre cómo enviar un informe de errores.
Añadida la información sobre los registros de cambios de RAPID.
Añadidos mensajes del registro de eventos.
C
Actualización de los mensajes del registro de eventos.
D
Actualización de los mensajes del registro de eventos.
E
Actualización de los mensajes del registro de eventos.
F
Correcciones menores. Actualización de los mensajes del registro de
eventos.
G
Correcciones menores. Actualización de los mensajes del registro de
eventos.
H
Nueva información en la sección Unidad de medida serie acerca de la batería.
Información más detallada acerca de la solución de problemas de las
fuentes de alimentación DSQC 604, 661 y 662.
Eliminadas las señales de E/S de seguridad: DRV1PANCH1, DRV1PANCH2,
DRV1SPEED.
Introducido el nuevo sistema de accionamiento. Se describen los sistemas
de accionamiento 04 y 09.
J
Publicado con RobotWare 5.13.
Capítulo Seguridad actualizado con:
• Actualizados los gráficos de las señales de seguridad para los niveles Peligro y Aviso. Consulte Señales de seguridad del manual en
la página 11.
• Nuevos adhesivos de seguridad en los manipuladores; consulte
Símbolos de seguridad de los adhesivos del producto en la página 13.
• Actualizado el gráfico de la sección Presencia de tensión en el interior del módulo de accionamiento en la página 29.
Actualizado el contenido de las siguientes secciones:
• Correcciones en la información del sistema de accionamiento en el
capítulo Descripciones e información general.
• Reestructuración de los capítulos de acuerdo con la nueva estrategia
de documentos.
• Actualizado el gráfico en Acciones recomendadas en la sección Sin
tensión en la toma de servicio en la página 50.
• Actualizada la información de Causas posibles en la sección Problema al poner en marcha el FlexPendant en la página 52.
• Gráficos actualizados en la sección LEDs del módulo de control.
• Gráfico actualizado en Causas posibles de la sección Problema al
liberar los frenos del robot en la página 62.
K
Actualización de los mensajes del registro de eventos.
L
Publicado con RobotWare 5.14.
Series de números de evento en la página 98 añadidas.
Continúa en la página siguiente
8
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
Descripción general de este manual
Continuación
Revisión
Descripción
M
Publicado con RobotWare 5.14.02.
Actualización de los mensajes del registro de eventos.
N
Publicado con RobotWare 5.15.
Actualización de los mensajes del registro de eventos.
P
Publicado con RobotWare 5.15.01.
Actualizada la sección Visión general de la solución de problemas en la
página 33.
Q
Publicado con RobotWare 5.60.
• Documento reestructurado en parte.
• Introducción del nuevo ordenador principalDSQC1000.
• El ordenador principal anterior DSQC 639 se ha eliminado de todo
el manual.
• El controlador doble se ha eliminado de todo el manual.
• Actualización de los mensajes del registro de eventos.
R
Publicado con RobotWare 5.61.
• Añadida una nota en la sección Series de números de evento en la
página 98.
• Añadidos los mensajes del registro de eventos en esloveno.
• Añadido el mensaje de registro de eventos io_elogtext.xml.
• Actualizado el nombre de los conectores y otras actualizaciones
menores en Solución de problemas de alimentación eléctrica del
sistema en la página 81 y Solución de problemas de la tarjeta de
distribución de alimentación eléctrica en la página 87.
S
Publicado con RobotWare 6.0.
• Añadida información acerca de Reinicio de un FlexPendant bloqueado en la página 69.
• Añadida información acerca de Tipo de mensajes de registro de
eventos en la página 97.
• Añadido el mensaje de registro de eventos pymc_elogtext.xml.
T
Publicado con RobotWare 6.01.
• Añadida la descripción de determinados tipos de mensajes del registro de eventos. Consulte Tipo de mensajes de registro de eventos
en la página 97.
• Añadida una nota en Tipo de mensajes de registro de eventos en
la página 97 acerca de la posibilidad de que existan leves diferencias
entre los registros de eventos en inglés y los registros de eventos
traducidos.
U
Publicado con RobotWare 6.02.
• Añadida la sección Herramientas de seguridad en la página 26.
V
Publicado con RobotWare 6.03.
• Añadidos registros de eventos de seguridad funcional; consulte 9
xxxx en la página 440.
• Añadidos registros de eventos de Connected Service Embedded,
consulte 17 xxxx en la página 631.
W
Publicado con RobotWare 6.04.
• Actualizados los registros de eventos para RobotWare 6.04.
X
Publicado con RobotWare 6.05.
• Introducción del nuevo ordenador principal DSQC1024.
• Registros de eventos actualizados para RobotWare 6.05. Se añadieron los registros de eventos para Integrated Vision.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
9
Descripción general de este manual
Continuación
10
Revisión
Descripción
Y
Publicado con RobotWare 6.06.
• Actualizados los registros de eventos para RobotWare 6.06.
• Se ha eliminado el ordenador principal DSQC1024.
Z
Publicado con RobotWare 6.07.
• Actualizados los registros de eventos para RobotWare 6.07.
• La sección de seguridad ha sido reestructurada.
AA
Publicado con RobotWare 6.08.
• Actualizados los registros de eventos para RobotWare 6.08.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
1 Seguridad
1.1 Señales de seguridad del manual
1 Seguridad
1.1 Señales de seguridad del manual
Introducción a las señales de seguridad
Esta sección especifica todas las señales de seguridad utilizadas en los manuales
de usuario. Cada señal se compone de:
•
Un título que especifica el nivel de peligro (PELIGRO, AVISO o CUIDADO)
y el tipo de peligro.
•
Una descripción breve de qué ocurrirá si no se elimina el peligro.
•
Instrucciones para la eliminación del peligro y facilitar con ello la realización
del trabajo.
Niveles de peligrosidad
En la tabla siguiente se definen los títulos que especifican los niveles de
peligrosidad indicados en todo este manual.
Símbolo
Designación
Significado
PELIGRO
Advierte de que, si no se siguen las instrucciones,
se producirá un accidente que puede dar lugar a lesiones graves o fatales y/o daños graves en el producto. Por ejemplo, se utiliza en situaciones de peligro relacionadas con el contacto con unidades
eléctricas de alta tensión, riesgo de explosión o incendio, riesgo de gases tóxicos, riesgo de aplastamiento, impacto, caída desde gran altura, etc.
AVISO
Advierte de que, si no se siguen las instrucciones,
es posible que se produzca un accidente que puede
dar lugar a lesiones graves, posiblemente fatales
y/o a daños importantes en el producto. Por ejemplo,
se utiliza en situaciones de peligro relacionadas con
el contacto con unidades eléctricas de alta tensión,
riesgo de explosión o incendio, riesgo de gases tóxicos, riesgo de aplastamiento, impacto, caída desde
gran altura, etc.
DESCARGA ELÉC- Advierte de los peligros de tipo eléctrico que podrían
TRICA
dar lugar a lesiones graves o incluso la muerte.
¡CUIDADO!
Advierte de que, si no se siguen las instrucciones,
es posible que se produzca un accidente que puede
dar lugar a lesiones y/o daños en el producto. También se utiliza para avisar de riesgos como quemaduras, lesiones oculares, lesiones cutáneas, daños
auditivos, aplastamiento, resbalón, tropiezo, impacto,
caída desde gran altura, etc. Además, se utiliza en
advertencias que incluyen requisitos funcionales en
operaciones de montaje y retirada de equipos en las
que existe el riesgo de causar daños en el producto
o causar roturas.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
11
1 Seguridad
1.1 Señales de seguridad del manual
Continuación
Símbolo
Designación
Significado
DESCARGA ELEC- Advierte de los peligros electrostáticos que podrían
TROSTÁTICA
causar daños graves al producto.
NOTA
Describe hechos y situaciones importantes.
RECOMENDACIÓN Describe dónde buscar información adicional acerca
de cómo realizar una operación de una forma más
sencilla.
12
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
1 Seguridad
1.2 Símbolos de seguridad de los adhesivos del producto
1.2 Símbolos de seguridad de los adhesivos del producto
Introducción a los adhesivos
En esta sección se describen brevemente los símbolos de seguridad utilizados
en los adhesivos (etiquetas) del producto.
Los símbolos se utilizan en combinaciones en los adhesivos, cada uno para
describir cada aviso específico. Las descripciones de esta sección son genéricas;
los adhesivos pueden contener información adicional, como por ejemplo valores.
Nota
Deben respetarse en todo momento los símbolos de seguridad y salud de los
adhesivos presentes en el producto. También debe respetarse la información
de seguridad adicional proporcionada por el consultor o integrador de sistemas.
Tipos de adhesivos
Tanto el manipulador como el controlador presentan varios adhesivos informativos
y de seguridad que contienen información importante acerca del producto. Esta
información es de utilidad para todas las personas que manejen el robot, por
ejemplo durante la instalación, el servicio técnico o el uso.
Los adhesivos de seguridad no varían según el idioma: sólo utilizan gráficos.
Consulte Símbolos de los adhesivos de seguridad en la página 13.
Los adhesivos de información pueden contener información en forma de texto (en
inglés, alemán y francés).
Símbolos de los adhesivos de seguridad
Símbolo
xx0900000812
xx0900000811
Descripción
¡Aviso!
Advierte de que, si no se siguen las instrucciones, es posible
que se produzca un accidente que puede dar lugar a lesiones
graves, posiblemente fatales y/o a daños importantes en el
producto. Por ejemplo, se utiliza en situaciones de peligro relacionadas con el contacto con unidades eléctricas de alta
tensión, riesgo de explosión o incendio, riesgo de gases tóxicos, riesgo de aplastamiento, impacto, caída desde gran altura,
etc.
¡Cuidado!
Advierte de que, si no se siguen las instrucciones, es posible
que se produzca un accidente que puede dar lugar a lesiones
y/o daños en el producto. También se utiliza para avisar de
riesgos como quemaduras, lesiones oculares, lesiones cutáneas, daños auditivos, aplastamiento, resbalón, tropiezo, impacto, caída desde gran altura, etc. Además, se utiliza en advertencias que incluyen requisitos funcionales en operaciones
de montaje y retirada de equipos en las que existe el riesgo
de causar daños en el producto o causar roturas.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
13
1 Seguridad
1.2 Símbolos de seguridad de los adhesivos del producto
Continuación
Símbolo
Descripción
Prohibición
Se utiliza en combinaciones con otros símbolos.
xx0900000839
xx0900000813
Consulte la documentación del usuario
Lea la documentación del usuario para obtener más detalles.
El manual que debe leer se define con el símbolo:
• Sin texto: Manual del producto.
• EPS: Manual de aplicaciones - Electronic Position
Switches.
Antes de proceder al desmontaje, consulte el manual del
producto
xx0900000816
No desmontar
El desmontaje de este componente puede provocar lesiones.
xx0900000815
Rotación extendida
Este eje presenta rotación extendida (área de trabajo) en
comparación con el eje estándar.
xx0900000814
Liberación de los frenos
La pulsación de este botón dará lugar a la liberación de los
frenos. Esto significa que el brazo del robot puede precipitarse.
xx0900000808
Continúa en la página siguiente
14
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
1 Seguridad
1.2 Símbolos de seguridad de los adhesivos del producto
Continuación
Símbolo
Descripción
Riesgo de volcado al aflojar los pernos
El robot puede volcar si los pernos no están apretados de forma
segura.
xx0900000810
xx1500002402
Aplastamiento
Riesgo de lesiones por aplastamiento.
xx0900000817
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
15
1 Seguridad
1.2 Símbolos de seguridad de los adhesivos del producto
Continuación
Símbolo
Descripción
Calor
Riesgo de calentamiento que puede causar quemaduras. (Se
usan ambas señales)
xx0900000818
3HAC 4431-1/06
!
xx1300001087
4
3
5
Robot en movimiento
El robot puede moverse de forma inesperada.
6
2
1
xx0900000819
xx1000001141
4
2
3
1
xx1500002616
Continúa en la página siguiente
16
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
1 Seguridad
1.2 Símbolos de seguridad de los adhesivos del producto
Continuación
Símbolo
Descripción
Botones de liberación de frenos
xx0900000820
xx1000001140
Argolla de elevación
xx0900000821
Eslinga de cadena con acortador
xx1000001242
Elevación del robot
xx0900000822
Aceite
Puede usarse en combinación con una prohibición si no se
permite el uso de aceite.
xx0900000823
Tope mecánico
xx0900000824
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
17
1 Seguridad
1.2 Símbolos de seguridad de los adhesivos del producto
Continuación
Símbolo
Descripción
Sin tope mecánico
xx1000001144
Energía almacenada
Avisa de que este componente contiene energía almacenada.
Se utiliza en combinación con el símbolo No desmontar.
xx0900000825
Presión
Advierte de que este componente está presurizado. Normalmente contiene texto adicional para indicar el nivel de presión.
xx0900000826
Apagar con el mando
Utilice el interruptor de alimentación del controlador.
xx0900000827
No pisar
Advierte de que encaramarse a estos componentes puede
causar daños en ellos.
xx1400002648
18
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
1 Seguridad
1.3 Símbolos de seguridad de los adhesivos del controlador
1.3 Símbolos de seguridad de los adhesivos del controlador
Introducción a los adhesivos
En esta sección se describen los símbolos de seguridad utilizados en los adhesivos
(etiquetas) del controlador.
Los símbolos se utilizan en combinaciones en los adhesivos, cada uno para
describir cada aviso específico. Las descripciones de esta sección son genéricas;
los adhesivos pueden contener información adicional, como por ejemplo valores.
Nota
Deben respetarse en todo momento los símbolos de seguridad y salud de los
adhesivos presentes en el producto. También debe respetarse la información
de seguridad adicional proporcionada por el consultor o integrador de sistemas.
Tipos de adhesivos
Tanto el manipulador como el controlador presentan varios adhesivos informativos
y de seguridad que contienen información importante acerca del producto. Esta
información es de utilidad para todas las personas que manejen el robot, por
ejemplo durante la instalación, el servicio técnico o el uso.
Los adhesivos de información pueden contener información en forma de texto (en
inglés, alemán y francés).
Símbolos de los adhesivos de seguridad
Adhesivo
Descripción
Descarga eléctrica
xx1400001151
En el interior del controlador existen componentes sensibles
a las descargas electrostáticas.
xx1400001162
Desconecte la fuente de alimentación antes de realizar operaciones de servicio técnico en el controlador.
xx1400001161
xx1400001160
Desconecte la fuente de alimentación antes de realizar operaciones de servicio técnico en el controlador (sólo para equipos
de soldadura).
Desconecte la alimentación eléctrica antes de intervenir en el
controlador (para controladores sin interruptor de alimentación
UL).
xx1700000354
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
19
1 Seguridad
1.3 Símbolos de seguridad de los adhesivos del controlador
Continuación
Adhesivo
Descripción
Alta tensión en el interior del módulo incluso si el interruptor
principal se encuentra en la posición OFF.
xx1400001156
Instrucciones de elevación para el controlador IRC5.
xx1400001157
Espacio de instalación necesario.
xx1400001155
Código QR para acuerdo de servicio ABB Basic Care.
xx1400001154
Continúa en la página siguiente
20
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
1 Seguridad
1.3 Símbolos de seguridad de los adhesivos del controlador
Continuación
Adhesivo
Descripción
Lea el manual del usuario antes de realizar el servicio técnico.
xx1400001152
Comprobación de seguridad eléctrica del sistema de robot
(interna).
xx1400001158
Prueba funcional del sistema de robot (interna).
xx1400001159
Adhesivo de características
xx1400001163
Etiqueta CE
xx1800000835
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
21
1 Seguridad
1.3 Símbolos de seguridad de los adhesivos del controlador
Continuación
Adhesivo
Descripción
Certificación UR (componente)
xx1400002060
Certificación UL (robot con controlador)
xx1400002061
Etiqueta SafeMove (para SafeMove Basic y software SafeMove
Advanced).
xx1700000355
Etiqueta UL de seguridad (para la solución Functional Safety
junto con la marca UL).
xx1700000353
22
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
1 Seguridad
1.4 Seguridad durante la solución de problemas
1.4 Seguridad durante la solución de problemas
Generalidades
Todos los trabajos normales de servicio técnico, instalación, mantenimiento y
reparación suelen realizarse con la alimentación eléctrica y la potencia neumática
e hidráulica desconectadas. Normalmente, todos los movimientos del manipulador
se evitan mediante topes mecánicos, etc.
El trabajo de solución de problemas es distinto. Durante la solución de problemas,
pueden estar encendidas todas las fuentes de alimentación o cualquiera de ellas
y el movimiento del manipulador puede controlarse manualmente desde
FlexPendant, con un programa de robot que se ejecuta localmente o con un PLC
al que el sistema puede estar conectado.
Peligros durante la solución de problemas
Esto implica que es necesario tener en cuenta distintas consideraciones especiales
sin desviarse lo más mínimo durante el trabajo de solución de problemas:
•
Todas las piezas eléctricas deben considerarse como piezascon tensión.
•
Se debe estar alerta ya que el manipulador puede moverse en cualquier
momento.
•
Dado que los circuitos de seguridad pueden estar desconectados o
puenteados para permitir las funciones que normalmente están prohibidas,
es de esperar que el sistema actúe en consecuencia.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
23
1 Seguridad
1.5 Normas aplicables
1.5 Normas aplicables
Nota
Las normas incluidas son válidas en el momento de la publicación de este
documento. Las normas retiradas gradualmente o sustituidas se retiran de la
lista cuando resulta necesario.
Normas, EN ISO
El producto se diseñó de acuerdo con los requisitos de:
Norma
Descripción
EN ISO 12100:2010
Safety of machinery - General principles for design - Risk assessment and risk reduction
EN ISO 13849-1:2015
Safety of machinery, safety related parts of control systems Part 1: General principles for design
EN ISO 13850:2015
Safety of machinery - Emergency stop - Principles for design
EN ISO 10218-1:2011
Robots for industrial environments - Safety requirements -Part
1 Robot
ISO 9787:2013
Robots and robotic devices -- Coordinate systems and motion
nomenclatures
ISO 9283:1998
Manipulating industrial robots, performance criteria, and related
test methods
EN ISO 14644-1:2015 i
Classification of air cleanliness
EN ISO 13732-1:2008
Ergonomics of the thermal environment - Part 1
EN 61000-6-4:2007 +
A1:2011
IEC 61000-6-4:2006 +
A1:2010
(opción 129-1)
EMC, Generic emission
EN 61000-6-2:2005
IEC 61000-6-2:2005
EMC, Generic immunity
EN IEC 60974-1:2012 ii
Arc welding equipment - Part 1: Welding power sources
EN IEC 60974-10:2014 ii
Arc welding equipment - Part 10: EMC requirements
EN IEC 60204-1:2006
Safety of machinery - Electrical equipment of machines - Part
1 General requirements
IEC 60529:1989 + A2:2013 Degrees of protection provided by enclosures (IP code)
i
ii
Sólo robots con protección Clean Room.
Sólo válido para los robots de soldadura al arco. Sustituye a EN IEC 61000-6-4 para los robots de
soldadura al arco.
Normas europeas
Norma
Descripción
EN 614-1:2006 + A1:2009 Safety of machinery - Ergonomic design principles - Part 1:
Terminology and general principles
EN 574:1996 + A1:2008
Safety of machinery - Two-hand control devices - Functional
aspects - Principles for design
Continúa en la página siguiente
24
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
1 Seguridad
1.5 Normas aplicables
Continuación
Otras normas
Norma
Descripción
ANSI/RIA R15.06
Safety requirements for industrial robots and robot systems
ANSI/UL 1740
Safety standard for robots and robotic equipment
CAN/CSA Z 434-14
Industrial robots and robot Systems - General safety requirements
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
25
1 Seguridad
1.6 Herramientas de seguridad
1.6 Herramientas de seguridad
Mecanismos de protección
Su sistema de robot puede contar con una enorme gama de elementos de
protección, como interbloqueos de puertas, barreras fotoeléctricas de seguridad
y trampillas de contacto, entre otros. El elemento más común es el interbloqueo
de la puerta de la célula del robot, que detiene temporalmente el robot si abre la
puerta.
IRC5
El controlador IRC5 dispone de tres mecanismos de protección separados, el paro
protegido general(GS), el paro protegido automático(AS) y el paro protegido
superior (SS).
Los elementos de protección conecta- ...están...
dos...
Al mecanismo GS
Siempre activados independientemente del modo
de funcionamiento.
Al mecanismo AS
Activados sólo si el sistema se encuentra en el
modo automático.
Al mecanismo SS
Siempre activados independientemente del modo
de funcionamiento.
Consulte la documentación de su centro de producción o su célula para saber
cómo está configurado su sistema de robot, dónde se encuentran los mecanismos
de protección y cómo funcionan.
Supervisión de seguridad
El paro de emergencia y los mecanismos de protección están supervisados, de
forma que cualquier fallo es detectado por el control y el robot queda detenido
hasta que el problema esté resuelto.
Funciones de paro integradas
El controlador monitoriza continuamente la funcionalidad del hardware y el software.
Si se detecta cualquier problema u error, el robot se detiene hasta que el problema
quede resuelto.
Si el fallo es...
...entonces...
Sencillo y fácil de resolver
Se genera un paro de programa sencillo (SYSSTOP).
Poco importante y con solución
Se genera SYSHALT que da lugar a un paro de
protección.
Grave, por ejemplo la rotura de un ele- Se genera un paro SYSFAIL que da lugar a un paro
mento físico
de emergencia. El controlador debe ser reiniciado
para poder volver al funcionamiento normal.
Limitación del área de trabajo del robot
Es posible limitar el área de trabajo del robot mediante topes mecánicos, funciones
de software o una combinación de ambos.
Continúa en la página siguiente
26
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
1 Seguridad
1.6 Herramientas de seguridad
Continuación
Consulte la documentación de su centro de producción o su célula para saber
cómo está configurado su sistema de robot.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
27
1 Seguridad
1.7.1 Los robots que no tienen frenos de sujeción de ejes son potencialmente letales
1.7 Seguridad en la solución de problemas
1.7.1 Los robots que no tienen frenos de sujeción de ejes son potencialmente letales
Descripción
Dado que el sistema de brazos del robot tiene un peso elevado, especialmente en
los modelos de robot de mayor tamaño, existe peligro si los frenos de retención
están desconectados, averiados o desgastados o si no funcionan correctamente
por cualquier otro motivo.
Por ejemplo, la caída de un manipulador puede causar la muerte o lesiones graves
a una persona que se encuentre debajo.
Seguridad en la manipulación
Acción
Información/figura
1
Si sospecha que los frenos de retención Encontrará especificaciones de pesos y
no funcionan, sujete el sistema de brazos otros parámetros en el Manual de producto
del robot por otros medios antes de traba- de cada modelo de robot.
jar en él.
2
¡Si inhabilita intencionadamente los frenos
de retención mediante la conexión de una
fuente de tensión externa, debe poner el
máximo cuidado!
La forma de conectar correctamente una
fuente de tensión externa se detalla en el
Manual de producto de cada modelo de
robot.
PELIGRO
NUNCA permanezca dentro del área de
trabajo del robot al desactivar los frenos
de sujeción, a no ser que el sistema de
brazos esté sujeto por otros medios.
PELIGRO
Bajo ninguna circunstancia se coloque
debajo del brazo manipulador.
28
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
1 Seguridad
1.7.2 Presencia de tensión en el interior del módulo de accionamiento
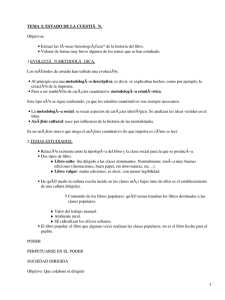
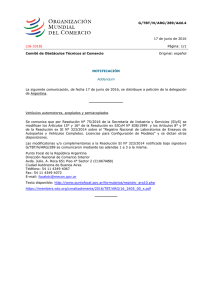
1.7.2 Presencia de tensión en el interior del módulo de accionamiento
Descripción
El módulo de accionamiento presenta tensión activa potencialmente accesible
inmediatamente debajo de las cubiertas posteriores y dentro de la cubierta
delantera, incluso si los interruptores principales están apagados.
A
en1000000049
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
29
1 Seguridad
1.7.2 Presencia de tensión en el interior del módulo de accionamiento
Continuación
B
SECTIONA-A
en1000000050
A
Tensión activa en los bornes del transformador incluso si los interruptores de
alimentación principal están apagados.
B
Tensión activa en los bornes Motors ON incluso si los interruptores de alimentación principal están apagados.
Seguridad en la manipulación
Lea esta información antes de abrir la cubierta posterior de cualquiera de los
módulos.
30
Paso
Acción
1
Asegúrese de que la alimentación principal entrante esté apagada.
2
Utilice un voltímetro para comprobar que no haya tensión entre ninguno de los
bornes.
3
Continúe con el trabajo de servicio técnico.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
1 Seguridad
1.7.3 Las piezas calientes pueden causar quemaduras
1.7.3 Las piezas calientes pueden causar quemaduras
Descripción
Durante el funcionamiento normal, varias piezas se calientan y tocarlas puede
causar quemaduras.
También existe el riesgo de incendio si se colocan materiales inflamables sobre
las superficies calientes.
Nota
Las piezas del convertidor de frecuencia del armario pueden estar calientes.
Seguridad en la manipulación
Utilice siempre una mano, manteniéndola a cierta distancia, para notar si un
componente potencialmente caliente irradia calor antes de llegar a tocarlo.
Espere hasta que el componente potencialmente caliente se haya enfriado si
necesita retirarlo o manejarlo en cualquier otro sentido.
La resistencia de drenaje puede alcanzar temperaturas de hasta 80 grados.
No coloque nada sobre las superficies metálicas calientes, por ejemplo, ni papel
ni plástico.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
31
Esta página se ha dejado vacía intencionadamente
2 Introducción a la solución de problemas
2.1 Visión general de la solución de problemas
2 Introducción a la solución de problemas
2.1 Visión general de la solución de problemas
Cómo utilizar este manual durante la solución de problemas
La tabla que aparece a continuación detalla cómo aprovechar al máximo la
información de este manual durante la solución de problemas del sistema de robot.
Tipo
Descripción
•
Fallo que no genera mensaje en el registro de eventos
Combinaciones de fallos
Resolución de problemas por unidades
•
•
•
•
FlexPendant
Comunicación de datos
Bus de campo y unidades de E/S
Fuente de alimentación
Descripción e información general
•
Indicaciones
Resolución de problemas con ayuda de los
registros de eventos
•
Cómo leer los mensajes del registro
de eventos
Mensajes del registro de eventos
Solución de problemas por síntomas de fallo
•
•
Manual de solución de problemas
Solución de problemas Cada uno de los fallos o errores son detectados inicialmente como
por síntomas de fallo un síntoma para el cual puede crearse o no un mensaje en el registro de eventos. Podría tratarse de un mensaje de registro de
eventos de error del FlexPendant o una observación que indica
que la caja reductora del eje 6 se está calentando o que no es
posible poner en marcha el controlador. Los fallos que muestra
un mensaje de registro de eventos aparecen enumerados al final
de este manual.
Consulte Solución de problemas por síntomas de fallo en la página 43.
Resolución de proble- Describe cómo realizar la resolución de problemas si lo que se
mas por unidades
describe a continuación no funciona correctamente, por ejemplo:
• FlexPendant
• Unidad de ordenador
• bus de campo y unidades de E/S
• fuente de alimentación
Consulte Resolución de problemas por unidades en la página 67.
Resolución de proble- Enumera todos los mensajes disponibles en el registro de eventos.
mas con ayuda de los Puede visualizarlos en FlexPendant o a través de RobotStudio. La
registros de eventos
posibilidad de consultar todos los mensajes resultará útil durante
la solución de problemas.
Consulte Solución de problemas con ayuda de los registros de
eventos en la página 97.
Información adicional
Además de la información ofrecida en este documento, hay otros documentos que
pueden aportar información esencial, como el diagrama de circuitos.
Estos documentos útiles se enumeran en la sección Diagramas de circuitos en la
página 633.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
33
2 Introducción a la solución de problemas
2.1 Visión general de la solución de problemas
Continuación
Lea los registros de eventos
Los registros de eventos de error que pueden verse en el FlexPendant o
RobotStudio, contienen una gran cantidad de información sobre cualquier problema
de funcionamiento detectado por el sistema.
Lea los diagramas de circuitos
Los diagramas de circuitos contienen una gran cantidad de información útil, o
incluso esencial, para cualquier persona capacitada y encargada de la solución
de problemas. Consulte Diagramas de circuitos en la página 633.
Compruebe los indicadores LED de las unidades electrónicas
Si piensa que un fallo puede ser causado por una unidad electrónica (una tarjeta
de circuitos del controlador u otro elemento similar), los LEDs de la parte frontal
de la unidad pueden servir de indicación.
34
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
2 Introducción a la solución de problemas
2.2 Conjunto de herramientas estándar
2.2 Conjunto de herramientas estándar
Generalidades
A continuación se enumeran las herramientas necesarias para realizar el trabajo
de solución de problemas. Todas las herramientas necesarias para implementar
cualquier medida correctora, como la sustitución de piezas, se enumeran en sus
secciones correspondientes del Manual del producto.
Contenido del conjunto de herramientas estándar del IRC5
Herramienta
Comentario
Destornillador Torx
Tx10
Destornillador Torx
Tx25
Destornillador Torx con punta esférica
Tx25
Destornillador plano
4 mm
Destornillador plano
8 mm
Destornillador plano
12 mm
Destornillador
De estrella del nº 1
Llave tubular
8 mm
Contenido, conjunto de herramientas estándar, solución de problemas
Cant. Ref.
Herramienta
Com.
-
-
Herramientas conven- Contenido especificado anteriormente.
cionales de taller
1
-
Multímetro
-
1
-
Osciloscopio
-
1
-
Grabadora
-
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
35
2 Introducción a la solución de problemas
2.3.1 Estrategias para la solución de problemas
2.3 Sugerencias y trucos durante la solución de problemas
2.3.1 Estrategias para la solución de problemas
¡Aísle el fallo!
Un fallo determinado puede dar lugar a varios síntomas a la vez, para los cuales
pueden crearse o no mensajes en el registro de eventos de error. Para poder
eliminar el fallo con eficacia, resulta vital distinguir el síntoma original de los
síntomas que han sido consecuencia de éste.
Una forma útil de aislar el fallo puede ser la creación de un registro histórico de
fallos, como se especifica en la sección ¡Cree un registro histórico de fallos! en la
página 39.
¡Divida la cadena de fallos en dos partes!
Durante la solución de problemas de cualquier sistema, resulta conveniente dividir
la cadena de fallos en dos partes. Esto quiere decir que:
•
Identifique la cadena completa.
•
Decida y mida el valor esperado en la mitad de la cadena.
•
Utilícela para determinar en qué mitad se ha producido el fallo.
•
Divida esta mitad en dos mitades más, y así en adelante.
•
Finalmente conseguirá aislar un solo componente. El que ha causado el
fallo.
Ejemplo
Una instalación concreta de IRB 7600 tiene una alimentación de 12 V CC en la
muñeca del manipulador para una herramienta. La herramienta no funciona y, al
comprobarla, se detecta que no le llega la alimentación de 12 V CC.
•
Compruebe si existe la alimentación de 12 V CC en la base del manipulador.
La medición indica que no existe una alimentación de 12 V CC. (Referencia:
Diagrama de circuitos del Manual del producto - IRC5)
•
Compruebe los conectores existentes entre el manipulador y la fuente de
alimentación del controlador. La medición indica que no existe una
alimentación de 12 V CC. (Referencia: Diagrama de circuitos del Manual del
producto - IRC5)
•
Compruebe el LED de la unidad de alimentación.
¡Compruebe los parámetros y cables de comunicación!
Las causas más comunes de los errores de la comunicación serie son:
•
Cables defectuosos (por ejemplo, las señales de envío y recepción están
intercambiadas)
•
Velocidades de transferencia (número de baudios)
•
Tamaños de datos mal configurados
Continúa en la página siguiente
36
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
2 Introducción a la solución de problemas
2.3.1 Estrategias para la solución de problemas
Continuación
¡Compruebe las versiones de software!
Asegúrese de que RobotWare y otros elementos de software ejecutados por el
sistema sean de las versiones correctas. Algunas versiones no son compatibles
con determinadas combinaciones de hardware.
Anote también los números de versión de todo el software ejecutado, dado que
será información útil para el personal de asistencia de ABB.
La forma de preparar un informe de errores completo para el personal de servicio
técnico local de ABB se detalla en la sección Preparación de un informe de errores
en la página 40.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
37
2 Introducción a la solución de problemas
2.3.2 Trabaje de forma sistemática
2.3.2 Trabaje de forma sistemática
¡No sustituya unidades al azar!
Antes de sustituir cualquier parte, es importante determinar la causa probable del
fallo y, con ello, determinar qué unidad es necesario sustituir.
La sustitución de unidades al azar en ocasiones puede solucionar un problema
grave, pero puede acabar en que la persona encargada de la solución de problemas
no sepa identificar cuáles son las unidades que funcionan perfectamente y cuáles
no.
¡Sustituya un elemento cada vez!
A la hora de sustituir una unidad presumiblemente defectuosa que ha sido aislada,
es importante sustituir una sola unidad cada vez.
Sustituya siempre los componentes de la forma detallada en la sección Reparación
del Manual de producto del robot o del controlador correspondiente.
Compruebe el sistema después de la sustitución, para ver si el problema ha
quedado resuelto.
Si sustituye varias unidades a la vez:
•
Resulta imposible determinar cuál de las unidades ha causado el fallo.
•
Se complica tremendamente el pedido de un repuesto.
•
Pueden introducirse nuevos fallos en el sistema.
¡Compruebe los elementos circundantes!
Con frecuencia, la causa puede resultar evidente una vez que se detecta
visualmente. En el área de la unidad que funciona erróneamente, asegúrese de
comprobar lo siguiente:
•
¿Están bien apretados los tornillos de fijación?
•
¿Están bien conectados los conectores?
•
¿Se encuentran en buen estado y sin daños los cables?
•
¿Están limpias las unidades (especialmente las unidades electrónicas)?
•
¿Ha instalado la unidad correcta?
¡Compruebe si ha retirado todas las herramientas!
Algunos trabajos de reparación y mantenimiento requieren el uso de herramientas
especiales fijadas al equipo del robot. Si no se retiran (por ejemplo un dispositivo
de bloqueo del cilindro de equilibrio o un cable de señales que conduce a una
unidad de ordenador utilizada para mediciones), pueden dar lugar a un
comportamiento errático en el robot.
¡Asegúrese de que todas estas herramientas hayan sido retiradas una vez
completado el trabajo de mantenimiento!
38
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
2 Introducción a la solución de problemas
2.3.3 Seguimiento del historial
2.3.3 Seguimiento del historial
¡Cree un registro histórico de fallos!
En algunos casos, una instalación en particular puede dar lugar a fallos que no
aparecen en otras. Por tanto, el registro de cada instalación puede ser una ayuda
considerable para la persona encargada de la solución de problemas.
Para facilitar la solución de problemas, un registro de las circunstancias que rodean
al fallo presenta las ventajas siguientes:
•
Permite que la persona encargada de la solución de problemas detecte
patrones en las causas y saque conclusiones que quizá no se observen en
cada fallo individual
•
Puede ayudar a detectar un evento concreto que siempre tiene lugar
inmediatamente antes del fallo, por ejemplo en una parte concreta del ciclo
de trabajo que se ejecuta.
¡Compruebe el historial!
Asegúrese de consultar siempre el registro histórico si lo utiliza. Recuerde también
preguntar al operador o la persona que estaba trabajando con el sistema cuando
se detectó el problema por primera vez.
¿En qué momento se produjo el fallo?
El síntoma que debe buscar durante la solución de problemas depende
enormemente del momento en el que se produjo el fallo: ¿Estaba recién instalado
el robot? ¿Se han hecho reparaciones recientemente?
En esta tabla se ofrecen sugerencias específicas sobre qué buscar en situaciones
concretas:
Si el sistema acaba de
ser:
Haga lo siguiente:
Instalado
Verifique:
• Archivos de configuración
• Conexiones
• Opciones y su configuración
Reparado
Verifique:
• Todas las conexiones a la pieza sustituida
• Fuentes de alimentación
• Que se haya montado la pieza correcta
Actualizado a una nueva
versión del software
Verifique:
• Versiones del software
• Compatibilidades entre el hardware y el software (
• Opciones y su configuración
Trasladado de un emplaza- Verifique:
miento a otro (un robot que
• Conexiones
ya funcionaba correctamen• Versiones del software
te)
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
39
2 Introducción a la solución de problemas
2.4 Preparación de un informe de errores
2.4 Preparación de un informe de errores
Introducción
Si necesita la ayuda del personal de asistencia de ABB durante la solución de
problemas de su sistema, puede preparar un informe de errores formal como se
detalla a continuación.
Para que el personal de asistencia de ABB pueda resolver mejor su problema,
usted tiene la posibilidad de adjuntar un archivo de diagnóstico especial generado
por el sistema si así se solicita.
El archivo de diagnóstico contiene lo siguiente:
•
Registro de eventos: Una lista con todos los eventos del sistema.
•
Copia de seguridad: Una copia de seguridad del sistema, realizada para
fines de diagnóstico.
•
Información del sistema: Información interna del sistema, útil para el
personal de asistencia de ABB.
¡RECUERDE que no es obligatorio crear ni adjuntar ningún archivo adicional al
informe de errores, a no ser que lo solicite explícitamente el personal de asistencia!
Creación del archivo de diagnóstico
El archivo de diagnóstico se crea manualmente de la forma detallada a
continuación.
Acción
1
Toque ABB, a continuación Panel de control y después Diagnóstico.
Aparece la pantalla siguiente:
en0500002175
2
Especifique el nombre que desee asignar al archivo de diagnóstico y la carpeta en
la que desea guardarlo y toque OK. La carpeta de guardado predeterminada es
C:/Temp, pero puede elegir cualquier carpeta, por ejemplo una memoria USB con
conexión externa.
Esta operación puede requerir varios minutos. Durante ese tiempo se muestra el
mensaje “Creando el archivo. Espere, por favor.”.
Continúa en la página siguiente
40
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
2 Introducción a la solución de problemas
2.4 Preparación de un informe de errores
Continuación
Acción
3
Para reducir el tiempo de transferencia del archivo, puede comprimir los datos en
un archivo ZIP.
4
Escriba un mensaje de correo electrónico normal a la dirección de su personal de
asistencia local de ABB y asegúrese de incluir la información siguiente:
• Número de serie del robot
• Versión de RobotWare
• Opciones externas
• Una descripción escrita del fallo. Cuanto más detallada sea la descripción,
más fácil le resultará al personal de asistencia de ABB ayudarle.
• Si dispone de una, incluya la clave de licencia.
• ¡No olvide adjuntar el archivo de diagnóstico!
5
¡Envíelo!
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
41
Esta página se ha dejado vacía intencionadamente
3 Solución de problemas por síntomas de fallo
3.1 Fallos durante la puesta en marcha
3 Solución de problemas por síntomas de fallo
3.1 Fallos durante la puesta en marcha
Introducción
En esta sección se describen los posibles fallos que podrían aparecer durante la
puesta en marcha y la acción recomendada para cada fallo.
Consecuencias
Problema al poner el marcha el sistema
Síntomas y causas
A continuación se enumeran los posibles síntomas de un fallo de puesta en marcha:
•
No se encienden los LEDs de ninguna unidad.
•
Salta la tierra de protección ante averías.
•
Resulta imposible cargar el software del sistema.
•
El FlexPendant no responde.
•
El FlexPendant se enciende, pero no responde a ninguna acción.
•
El disco que contiene el software del sistema no se pone en marcha
correctamente.
Acciones recomendadas
A continuación se enumeran las acciones recomendadas en caso de un fallo de
puesta en marcha:
Nota
Esta situación puede deberse a una pérdida de alimentación en muchos
momentos.
Acción
Información/figura
1
Asegúrese de que la alimentación principal del Encontrará esta información en la
sistema esté presente y respete los límites espe- documentación de su planta o su
cificados.
célula.
2
Asegúrese de que el transformador principal
La forma de conectar el transformahaya sido conectado correctamente para los ni- dor principal se detalla en el manual
veles de tensión disponibles.
de producto del controlador.
3
Asegúrese de que todos los interruptores principales estén encendidos.
4
Asegúrese de que la fuente de alimentación del En caso necesario, resuelva los procontrolador se encuentre dentro de los límites blemas de las unidades de alimentaespecificados.
ción como se explica en la sección
Solución de problemas de alimentación eléctrica del sistema en la página 81.
5
Si no hay ningún LED encendido, continúe en la
sección Todos los LEDs del controlador están
apagados en la página 48.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
43
3 Solución de problemas por síntomas de fallo
3.1 Fallos durante la puesta en marcha
Continuación
Acción
44
Información/figura
6
Si el sistema no responde, continúe en la sección El controlador no responde en la página 45.
7
Si el FlexPendant no responde, continúe en la
sección Problema al poner en marcha el FlexPendant en la página 52.
8
Si el FlexPendant se pone en marcha pero no
se comunica con el controlador, continúe en la
sección Problema al conectar el FlexPendant al
controlador en la página 53.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
3 Solución de problemas por síntomas de fallo
3.2 El controlador no responde
3.2 El controlador no responde
Descripción
En esta sección se describen los posibles fallos y las acciones recomendadas
para cada fallo:
•
El controlador de robot no responde
•
No se encienden los LEDs indicadores
Consecuencias
El sistema no puede usarse con el FlexPendant.
Causas posibles
Síntomas
Acción recomendada
1
El controlador no está conectado Asegúrese de que la alimentación principal funcione
a la alimentación principal.
correctamente y de que el nivel de tensión coincida
con los requisitos del controlador.
2
El transformador principal no
funciona o no está conectado
correctamente.
3
Es posible que el fusible principal Asegúrese de que el fusible principal (Q1) del inte(Q1) haya saltado.
rior del controlador no haya saltado
Asegúrese de que el transformador principal esté
configurado correctamente para el nivel de tensión
de la red.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
45
3 Solución de problemas por síntomas de fallo
3.3 Bajo rendimiento en el controlador
3.3 Bajo rendimiento en el controlador
Descripción
El controlador presenta un rendimiento bajo y parece funcionar de forma irracional.
El controlador no responde en absoluto, siga los pasos detallados en la sección
El controlador no responde en la página 45.
Consecuencias
Es posible que se observen los síntomas siguientes:
•
La ejecución del programa es deficiente, aparentemente errática y con
bloqueos en ocasiones.
Causas posibles
El sistema de ordenadores está experimentando una carga excesiva, lo que puede
deberse a una de las causas siguientes o a una combinación de ellas:
•
Programas que contienen una proporción excesiva de instrucciones
únicamente lógicas que provocan bucles de programa demasiado rápidos,
lo cual a su vez sobrecarga el procesador.
•
El intervalo de actualización de E/S tiene asignado un valor bajo, lo cual
provoca actualizaciones frecuentes y una elevada carga de E/S.
•
Se utilizan con demasiada frecuencia conexiones cruzadas internas del
sistema y funciones lógicas.
•
Un PLC externo u otro ordenador de supervisión, se pone en contacto con
el sistema con una frecuencia excesiva, lo que sobrecarga el sistema.
Acciones recomendadas
Acción
Información/figura
1
Compruebe si el programa contiene instruccio- Algunas ubicaciones adecuadas para
nes lógicas (u otras instrucciones que “no re- la incorporación de instrucciones WAIT
quieren tiempo de ejecución”), dado que estos son las siguientes:
programas pueden provocar que la ejecución
• En la rutina Main, preferiblemente
entre en un bucle si no se cumple ninguna de
cerca de su final.
las condiciones previstas.
• En los bucles WHILE/FOR/GOTO,
preferiblemente al final, cerca de
Para evitar estos bucles, puede probar a añadir
la parte ENDWHILE/ENDFOR o
una o varias instrucciones WAIT. Utilice únicasimilar de la instrucción.
mente tiempos de espera breves en las instrucciones WAIT, para evitar una ralentización innecesaria del programa.
2
Asegúrese de que el valor del intervalo de ac- ABB recomienda las frecuencias de
tualizaciones de E/S de cada tarjeta de E/S no sondeo siguientes:
sea demasiado bajo. Estos valores se cambian
• DSQC 327A: 1000
mediante RobotStudio.
• DSQC 328A: 1000
Las unidades de E/S que no sean leídas regu• DSQC 332A: 1000
larmente pueden pasarse al modo de “cambio
• DSQC 377A: 20-40
de estado”, de la forma que se detalla en el
• Todas las demás: >100
manual de RobotStudio.
Continúa en la página siguiente
46
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
3 Solución de problemas por síntomas de fallo
3.3 Bajo rendimiento en el controlador
Continuación
Acción
Información/figura
3
Compruebe si existe un número elevado de
conexiones cruzadas o comunicaciones de
E/S entre el PLC y el sistema de robot.
Una comunicación intensa con PLCs u
otros ordenadores externos puede generar una carga considerable para el
ordenador principal del sistema de robot.
4
Intente programar el PLC de forma que utilice El sistema de robot cuenta con varias
instrucciones controladas por eventos en lugar entradas y salidas fijas en el sistema
de instrucciones en bucle.
que pueden usarse para este fin.
Una comunicación intensa con PLCs u
otros ordenadores externos puede generar una carga considerable para el
ordenador principal del sistema de robot.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
47
3 Solución de problemas por síntomas de fallo
3.4 Todos los LEDs del controlador están apagados
3.4 Todos los LEDs del controlador están apagados
Descripción
Ninguno de los LEDs se enciende en el controlador.
Consecuencias
El sistema no puede ser utilizado ni puesto en marcha en absoluto.
Causas posibles
Este síntoma puede deberse a las causas siguientes (enumeradas en orden de
probabilidad):
•
El sistema no recibe alimentación.
•
El transformador principal no está conectado a la tensión de alimentación
correcta.
•
El interruptor F6 (si se usa) funciona incorrectamente o está abierto por algún
otro motivo.
•
El contactor K41 no funciona correctamente o está abierto por algún otro
motivo.
Continúa en la página siguiente
48
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
3 Solución de problemas por síntomas de fallo
3.4 Todos los LEDs del controlador están apagados
Continuación
en1000000051
Acciones recomendadas
Acción
Información
1
Asegúrese de que el interruptor principal esté encendido.
2
Asegúrese de que el sistema reciba
alimentación.
3
Compruebe la conexión del transforma- Las tensiones aparecen marcadas en los
dor principal.
bornes. Asegúrese de que coinciden con la
alimentación del centro de producción.
4
Asegúrese de que el interruptor F6 (si El interruptor F6 aparece en el diagrama de
se usa) esté cerrado en la posición 3. circuitos del manual de producto del controlador.
Utilice un voltímetro para medir la tensión
principal entrante.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
49
3 Solución de problemas por síntomas de fallo
3.5 Sin tensión en la toma de servicio
3.5 Sin tensión en la toma de servicio
Descripción
Algunos controladores cuentan con tomas hembra de tensión de servicio y esta
información se aplica únicamente a estos módulos.
No existe tensión en la toma de servicio del controlador para alimentar un equipo
de servicio externo.
Consecuencias
El equipo conectado a la toma de servicio del controlador no funciona.
Causas probables
Este síntoma puede deberse a las causas siguientes (enumeradas en orden de
probabilidad):
•
Interruptor saltado (F5)
•
Tierra de protección ante averías saltada (F4)
•
Pérdida de alimentación principal
•
Transformadores conectados incorrectamente
xx0500001403
Acciones recomendadas
Acción
1
Información
Asegúrese de que el interruptor
Asegúrese de que el equipo conectado a la toma
automático del controlador no haya de servicio no consuma demasiada alimentación,
saltado.
lo que hace que el interruptor salte.
Continúa en la página siguiente
50
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
3 Solución de problemas por síntomas de fallo
3.5 Sin tensión en la toma de servicio
Continuación
Acción
Información
2
Asegúrese de que la tierra de pro- Asegúrese de que los equipos conectados a la
tección ante averías no haya salta- toma de servicio no conduzcan corriente a tierra,
do.
lo que hace que la tierra de protección ante averías salte.
3
Asegúrese de que la fuente de ali- Consulte la documentación de la planta para
mentación del sistema de robot
comprobar los valores de tensión.
esté dentro de las especificaciones.
4
Asegúrese de que el transformador
(A) que proporciona la alimentación
a la toma esté conectado correctamente, es decir, que las tensiones
de entrada y salida se correspondan con las especificaciones.
xx0500002028
Consulte la documentación de la planta para
comprobar los valores de tensión.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
51
3 Solución de problemas por síntomas de fallo
3.6 Problema al poner en marcha el FlexPendant
3.6 Problema al poner en marcha el FlexPendant
Descripción
El FlexPendant no responde, en absoluto o de forma intermitente.
No se permite ninguna entrada y no hay ninguna función disponible.
Si el FlexPendant se pone en marcha pero no muestra ninguna imagen en la
pantalla, realice los pasos detallados en la sección Problema al conectar el
FlexPendant al controlador en la página 53.
Consecuencias
El sistema no puede usarse con el FlexPendant.
Causas posibles
Este síntoma puede deberse a las causas siguientes (enumeradas en orden de
probabilidad):
•
El sistema no ha sido encendido.
•
El FlexPendant no está conectado al controlador.
•
El cable proveniente del controlador está dañado.
•
El conector del cable está dañado.
•
La alimentación desde el controlador para el FlexPendant está averiada.
Acciones recomendadas
Se recomiendan las acciones siguientes (enumeradas en orden de probabilidad).
Acción
52
Información
1
Asegúrese de que el sistema esté encendido La forma de conectar el FlexPendant al
y de que el FlexPendant esté conectado al controlador se detalla en Manual del
controlador.
operador - Procedimientos iniciales IRC5 y RobotStudio.
2
Inspeccione el cable del FlexPendant para Si está averiado, sustituya el FlexPendetectar los posibles daños físicos visibles. dant.
3
Si es posible, haga una prueba conectando
otro FlexPendant para descartar el FlexPendant y el cable como fuentes del error.
4
Si es posible, pruebe el FlexPendant con
otro controlador para descartar el controlador como fuente del error.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
3 Solución de problemas por síntomas de fallo
3.7 Problema al conectar el FlexPendant al controlador
3.7 Problema al conectar el FlexPendant al controlador
Descripción
El FlexPendant se enciende, pero no muestra ninguna imagen en la pantalla.
No se permite ninguna entrada y no hay ninguna función disponible.
Consulte también la sección Problema al poner en marcha el FlexPendant en la
página 52.
Consecuencias
El sistema no puede usarse con el FlexPendant.
Causas posibles
Este síntoma puede deberse a las causas siguientes (enumeradas en orden de
probabilidad):
•
La red Ethernet presenta problemas.
•
El ordenador principal presenta problemas.
Acciones recomendadas
Se recomiendan las acciones siguientes (enumeradas en orden de probabilidad).
Acción
Información
1
Compruebe todos los cables que van desde la
unidad de alimentación hasta el ordenador principal, asegurándose de que estén conectados
correctamente.
2
Asegúrese de que el FlexPendant haya sido conectado correctamente al controlador.
3
Compruebe todos los LEDs indicadores de todas Todos los LEDs indicadores y su
las unidades del controlador.
significado se especifican en la
sección Solución de problemas de
los LED del controlador en la página 67.
4
Compruebe todas las señales de estado del ordenador principal.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
53
3 Solución de problemas por síntomas de fallo
3.8 Mensajes de evento erráticos en el FlexPendant
3.8 Mensajes de evento erráticos en el FlexPendant
Descripción
Los mensajes de evento mostrados en el FlexPendant son erráticos y no parecen
corresponderse con ningún problema de funcionamiento real del robot. Es posible
que aparezcan varios tipos de mensajes aparentemente erróneos.
Este tipo de fallo puede producirse tras un desmontaje o una regeneración a gran
escala del manipulador, si estos trabajos no se han realizado correctamente.
Consecuencias
Graves problemas de uso debido a los mensajes que aparecen constantemente.
Causas posibles
Este síntoma puede deberse a las causas siguientes (enumeradas en orden de
probabilidad):
•
Cableado interno del manipulador no realizado correctamente. Las causas
pueden ser las siguientes: Conexión defectuosa de los conectores, bucles
de cable demasiado tensos y que suponen tirones durante los movimientos
del manipulador, aplastamientos en el aislamiento de los cables o daños por
rozamiento que provocan la derivación de las señales a tierra.
Acciones recomendadas
Se recomiendan las acciones siguientes (enumeradas en orden de probabilidad).
Acción
54
Información
1
Inspeccione todo el cableado interno del manipula- Monte de nuevo los cables de la
dor, especialmente todos los cables desconecta- forma detallada en el manual de
dos, conectados con otro encaminamiento o reuni- producto del robot.
dos en un haz durante los últimos trabajos de reparación.
2
Inspeccione todos los conectores de los cables
para asegurarse de que estén bien conectados y
apretados.
3
Inspeccione el aislamiento de todos los cables para Sustituya los cables defectuosos
detectar posibles daños.
de la forma detallada en el manual
de producto del robot.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
3 Solución de problemas por síntomas de fallo
3.9 Problema al mover el robot
3.9 Problema al mover el robot
Descripción
Es posible poner en marcha el sistema pero el joystick del FlexPendant no funciona.
Consecuencias
No se posible mover el robot manualmente.
Causas posibles
Este síntoma puede deberse a las causas siguientes (enumeradas en orden de
probabilidad):
•
El joystick está defectuoso.
•
Es posible que el joystick esté inclinado.
Acciones recomendadas
Se recomiendan las acciones siguientes (enumeradas en orden de probabilidad).
Acción
Información
1
Asegúrese de que el controlador está en modo La forma de cambiar el modo de funmanual.
cionamiento se describe en Manual
del operador - IRC5 con FlexPendant.
2
Asegúrese de que el FlexPendant esté conectado correctamente al módulo de control.
3
Restablezca el FlexPendant.
Pulse el botón de restablecimiento
situado en la parte posterior del
FlexPendant.
Nota
El pulsador de restablecimiento permite restablecer el FlexPendant, pero
no el sistema que funciona dentro del
controlador.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
55
3 Solución de problemas por síntomas de fallo
3.10 Fallo de regrabación de firmware
3.10 Fallo de regrabación de firmware
Descripción
Al regrabar el firmware, es posible que el proceso automático falle.
Consecuencias
El proceso de regrabación automático se ha interrumpido y el sistema se detiene.
Causas posibles
Este fallo se produce normalmente debido a la incompatibilidad entre el hardware
y el software.
Consecuencias
Se recomiendan las acciones siguientes (enumeradas en orden de probabilidad).
Acción
56
Información
1
Consulte el registro de eventos para encontrar Los registros también están disponiun mensaje que indica qué unidad ha fallado. bles a través de RobotStudio.
2
¿Ha sustituido recientemente la unidad pertinente?
En caso afirmativo, asegúrese de que las versiones de las unidades anterior y nueva sean
idénticas.
Si NO es así, compruebe las versiones del
software.
3
¿Ha sustituido recientemente RobotWare?
En caso afirmativo, asegúrese de que las versiones de las unidades anterior y nueva sean
idénticas.
¡De lo contrario, realice los pasos siguientes!
4
Pida a su representante local de ABB una
versión de firmware que sea compatible con
su combinación de hardware y software.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
3 Solución de problemas por síntomas de fallo
3.11 Exactitud de trayectoria poco uniforme
3.11 Exactitud de trayectoria poco uniforme
Descripción
La trayectoria del punto central de la herramienta del robot no es uniforme. Varía
cada cierto tiempo y en ocasiones trae consigo ruido producido por los rodamientos,
las cajas reductoras u otros puntos.
Consecuencias
No es posible continuar con la producción.
Causas posibles
Este síntoma puede deberse a las causas siguientes (enumeradas en orden de
probabilidad):
•
Robot no calibrado correctamente.
•
Punto central de la herramienta del robot definido incorrectamente.
•
Barra paralela dañada (sólo se aplica a los robots que cuentan con barras
paralelas).
•
Daños en la unión mecánica entre un motor y la caja reductora. Con
frecuencia, esto hace que se genere ruido desde el motor dañado.
•
Rodamientos dañados o desgastados (especialmente si los problemas de
uniformidad de la trayectoria van asociados a chasquidos o chirridos
provenientes de uno o varios rodamientos).
•
Es posible que tenga conectado un tipo de robot incorrecto al controlador.
•
Es posible que los frenos no se liberen correctamente.
Acciones recomendadas
Para poder solucionar estos síntomas, se recomiendan las acciones siguientes
(enumeradas en orden de probabilidad):
Acción
Información/figura
1
Asegúrese de que la herramienta y el
La forma de definirlos se detalla en Manual
objeto de trabajo del robot estén defini- del operador - IRC5 con FlexPendant.
dos correctamente.
2
Compruebe las posiciones de los cuenta- Actualice en caso necesario.
rrevoluciones.
3
En caso necesario, recalibre los ejes del La forma de calibrar el robot se detalla en
robot.
Manual del operador - IRC5 con FlexPendant.
4
Busque el rodamiento defectuoso siguien- Sustituya el rodamiento defectuoso de la
do el origen del ruido.
forma especificada en el manual de producto
del robot.
5
Busque el motor defectuoso siguiendo Sustituya el motor o la caja reductora defecel origen del ruido.
tuosos de la forma especificada en el manual
Estudie la trayectoria del TCP del robot de producto del robot.
para establecer qué eje, y por tanto qué
motor, puede presentar la avería.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
57
3 Solución de problemas por síntomas de fallo
3.11 Exactitud de trayectoria poco uniforme
Continuación
Acción
58
Información/figura
6
Compruebe el estado de la barra paralela Sustituya la barra paralela defectuosa de la
(sólo se aplica a los robots que cuentan forma especificada en el manual de producto
con barras paralelas).
del robot.
7
Asegúrese de que el tipo de robot correcto esté conectado, como se especifica
en los archivos de configuración.
8
Asegúrese de que los frenos del robot
funcionen adecuadamente.
Siga los pasos que se detallan en la sección
Problema al liberar los frenos del robot en
la página 62.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
3 Solución de problemas por síntomas de fallo
3.12 Ruidos mecánicos o disonancia
3.12 Ruidos mecánicos o disonancia
Descripción
No se han observado ruidos mecánicos ni disonancia previos susceptibles de
indicar problemas en los cojinetes, motores, cajas reductoras u otros elementos
similares. Vigile los cambios a lo largo del tiempo.
Con frecuencia, los cojinetes dañados emiten chirridos, ruidos de raspado y
chasquidos cuando están a punto de averiarse.
Consecuencias
Los daños en los rodamientos hacen que la exactitud de la trayectoria no sea
uniforme y, en casos graves, es posible que la articulación quede totalmente
bloqueada.
Causas posibles
Este síntoma puede deberse a:
•
Rodamientos desgastados.
•
Penetración de contaminación entre los anillos de los cojinetes.
•
Pérdida de lubricación de los rodamientos.
•
Piezas metálicas, ventiladores o disipadores de calor sueltos.
Si el ruido proviene de una caja reductora, también es posible que ocurra lo
siguiente:
•
Sobrecalentamiento.
Acciones recomendadas
Se recomienda llevar a cabo las siguientes acciones:
Acción
Información
1
¡CUIDADO!
Antes de acercarse al componente potencialmente caliente del robot, respete la información de seguridad de la sección Las piezas
calientes pueden causar quemaduras en la
página 31.
2
Verifique el servicio se realiza conforme al
calendario de mantenimiento.
3
Si alguno de los cojinetes genera ruido,
identifique cuál es y asegúrese de que esté
convenientemente lubricado.
4
Si es posible, retire la articulación y mida la
separación.
5
No debe reemplazar individualmente los rodamientos del interior del motor, sino la totalidad del motor.
6
Asegúrese de que los rodamientos estén
montados correctamente.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
59
3 Solución de problemas por síntomas de fallo
3.12 Ruidos mecánicos o disonancia
Continuación
Acción
60
Información
7
Apriete los tornillos si detecta alguna hoja
metálica, ventilador o disipador de calor
suelto.
8
El exceso de temperatura del aceite de la
caja reductora puede deberse a:
• Calidad o nivel de aceite incorrectos.
• El ciclo de trabajo del robot hace un
uso excesivo de un eje determinado.
Investigue si es posible programar
"periodos de enfriamiento" reducidos
como parte de la aplicación.
• Sobrepresión creada dentro de la caja
reductora.
Los robots que realizan ciclos de trabajo
muy concretos que los someten a un
trabajo muy intenso pueden utilizar tapones de aceite ventilados. No se incluyen
en los robots para trabajos normales,
pero puede adquirirlos a través de su
representante local de ABB.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
3 Solución de problemas por síntomas de fallo
3.13 El manipulador se precipita al desconectar la alimentación
3.13 El manipulador se precipita al desconectar la alimentación
Descripción
El manipulador funciona correctamente mientras el estado Motores ON está
activado, pero al pasar a Motores OFF, se cae por su propio peso.
El freno de retención que está integrado en cada motor no puede sostener el peso
del brazo del manipulador.
Consecuencias
Este problema puede causar lesiones graves o incluso la muerte del personal que
trabaja en el área, o bien daños graves en el manipulador y/o el equipo circundante.
Causas posibles
Este síntoma puede deberse a:
•
Freno defectuoso.
•
Alimentación defectuosa al freno.
Acciones recomendadas
Se recomienda llevar a cabo las siguientes acciones:
Acción
Información
1
Determine qué motores hacen que el robot
se caiga.
2
Compruebe la alimentación del freno del Consulte el diagrama de circuitos.
motor que causa la caída durante el estado
Motores OFF.
3
Retire el resolver del motor para comprobar Si se detecta una avería, es necesario
si aparecen signos de fugas de aceite.
reemplazar el motor como una unidad
completa.
4
Retire el motor de la caja reductora para Si se detecta una avería, es necesario
inspeccionarlo desde el lado de impulsión. reemplazar el motor como una unidad
completa.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
61
3 Solución de problemas por síntomas de fallo
3.14 Problema al liberar los frenos del robot
3.14 Problema al liberar los frenos del robot
Descripción
Al iniciar el funcionamiento del robot o mover el robot, los frenos internos del robot
deben liberarse para permitir el movimiento.
Consecuencias
Si los frenos no se liberan, no es posible ningún movimiento del robot y pueden
aparecer varios mensajes en el registro de errores.
Causas posibles
Este síntoma puede deberse a las causas siguientes (enumeradas en orden de
probabilidad):
•
El contactor de frenos (K44) no funciona correctamente.
•
El sistema no pasa correctamente al estado Motores ON.
•
Freno defectuoso en el eje del robot.
•
Falta la tensión de alimentación de 24 V de frenos.
en1000000051
Continúa en la página siguiente
62
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
3 Solución de problemas por síntomas de fallo
3.14 Problema al liberar los frenos del robot
Continuación
Acciones recomendadas
En esta sección se detalla qué pasos deben realizarse si los frenos del robot no
se liberan.
Acción
Información
1
Asegúrese de que el contactor de frenos esté
activado.
Debe escucharse un 'tic', o puede
incluso medir la resistencia entre
los contactos auxiliares de la parte
superior del contactor.
2
Asegúrese de que los contactores de funcionamiento (K42 y K43) estén activados. ¡RECUERDE
que es necesario que estén activados ambos
contactores, no sólo uno!
Debe escucharse un 'tic', o puede
incluso medir la resistencia entre
los contactos auxiliares de la parte
superior del contactor.
3
Utilice los pulsadores del robot para poner a
prueba los frenos.
Si sólo uno de los frenos funciona incorrectamente, es posible que el freno instalado esté defectuoso y que deba reemplazarlo.
Si ninguno de los frenos funciona, es probable
que no está disponible la alimentación de 24 V
de los frenos.
La ubicación de los pulsadores varía en función del modelo de robot.
¡Consulte el manual de producto
del robot!
4
Compruebe la alimentación para asegurarse de
que la tensión de 24 V de los frenos sea correcta.
5
Existen varios fallos diferentes del sistema que Los mensajes del registro de evenpueden hacer que los frenos permanezcan activa- tos también están disponibles a
dos. En estos casos, los mensajes del registro de través de RobotStudio.
eventos le proporcionarán información adicional.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
63
3 Solución de problemas por síntomas de fallo
3.15 Errores intermitentes
3.15 Errores intermitentes
Descripción
Durante el funcionamiento, los errores y averías pueden producirse de una forma
aparentemente aleatoria.
Consecuencias
El funcionamiento se interrumpe y, ocasionalmente, se muestran mensajes en el
registro de eventos que no parecen estar relacionados con ninguna avería real
del sistema. Este tipo de problema afecta en ocasiones a las cadenas de paro de
emergencia o de habilitación respectivamente y en ocasiones pueden resultar muy
difíciles de aclarar.
Causas probables
Estos errores pueden producirse en cualquier parte del sistema de robot y pueden
deberse a:
•
Interferencias externas
•
Interferencias internas
•
Conexiones sueltas o uniones secas, por ejemplo conexiones incorrectas
de los apantallamientos de los cables
•
Fenómenos térmicos, por ejemplo grandes variaciones de temperatura en
el centro de producción
Acciones recomendadas
Para poder solucionar estos síntomas, se recomiendan las acciones siguientes
(enumeradas en orden de probabilidad):
Acción
Información/figura
1
Compruebe todos los cables, especialmente en las
cadenas de paro de emergencia y habilitación. Asegúrese de que todos los conectores estén conectados correctamente.
2
Compruebe si los LEDs indicadores indican cualquier Todos los LEDs indicadores y
avería que podría ayudar a esclarecer el problema. su significado se especifican
en la sección Solución de problemas de los LED del controlador en la página 67.
3
Compruebe los mensajes del registro de eventos. Los mensajes del registro de
En ocasiones, algunas combinaciones concretas de eventos pueden consultarse a
errores son intermitentes.
través del FlexPendant o con
RobotStudio.
4
Compruebe el comportamiento del robot y otras si- Si es posible, mantenga registuaciones cada vez que se produce ese tipo de error. tradas las averías en un registro o un medio similar.
5
Compruebe si cualquier situación del entorno de
trabajo del robot cambia también periódicamente,
por ejemplo en caso de interferencias de equipos
eléctricos que sólo se usan cada cierto tiempo.
Continúa en la página siguiente
64
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
3 Solución de problemas por síntomas de fallo
3.15 Errores intermitentes
Continuación
Acción
6
Información/figura
Investigue si las condiciones ambientales (como la Si es posible, mantenga registemperatura ambiente, la humedad, etc.) tienen algo tradas las averías en un regisque ver con la avería.
tro o un medio similar.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
65
3 Solución de problemas por síntomas de fallo
3.16 Cómo forzar el inicio de Boot Application
3.16 Cómo forzar el inicio de Boot Application
Descripción
El controlador de robot siempre funciona en uno de los dos modos siguientes:
•
Modo de funcionamiento normal (se selecciona un sistema creado por el
usuario para su ejecución)
•
Modo Boot Application (modo de mantenimiento avanzado)
En ocasiones poco frecuentes, un error grave (del software o de la configuración
del sistema seleccionado) puede impedir el arranque correcto del controlador en
el modo de funcionamiento normal. Un caso típico es el de un controlador reiniciado
después de un cambio de configuración de la red que provoca que el controlador
no responda a las peticiones realizadas desde el FlexPendant, RobotStudio o FTP.
Para rescatar el controlador de robot en esta situación, se ha implementado una
nueva forma (force starting of Boot Application through main power
switch) de forzar el inicio del controlador en el modo Boot Application.
Consecuencias
El sistema presenta problemas de arranque o el FlexPendant no puede conectarse
al sistema.
Acción recomendada
Repita tres veces seguidas la acción indicada a continuación:
1 Encienda el interruptor de alimentación principal.
2 Espere aproximadamente 20 segundos.
3 Apague el interruptor de alimentación principal.
El sistema activo actualmente se deselecciona y se realiza un arranque forzado
de Boot Application en el siguiente arranque. De este modo es posible rescatar
datos de un sistema que no arranca correctamente.
Nota
Esta acción no afectará a ninguno de los archivos de los directorios que
pertenecen al sistema deseleccionado y esta acción no tiene ningún efecto si
el controlador ya se encuentra en el modo Boot Application.
66
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.1 Solución de problemas de los LED del controlador
4 Resolución de problemas por unidades
4.1 Solución de problemas de los LED del controlador
Generalidades
El controlador incluye un conjunto de LED indicadores que ofrecen información
importante para la solución de problemas. Si no llega a encenderse ningún LED
al encender el sistema, siga las operaciones de solución de problemas detalladas
en la sección Todos los LEDs del controlador están apagados en la página 48
Todos los LEDs de las distintas unidades y su significado se describen en las
secciones siguientes.
Todas las unidades dotadas de LEDs se muestran en la figura siguiente:
Unidades con LEDs en el controlador
A
B
H
C
D
J
E
F
G
xx1300000858
A
Fuente de alimentación de I/O Solución de problemas de alimentación eléctrica
del usuario
de E/S del usuario en la página 94
B
Unidad de ordenadores
Solución de problemas en la unidad informática
en la página 72
C
Tarjeta de LEDs
Tarjeta de LEDs en la página 68
D
Tarjeta de distribución de ali- Solución de problemas de la tarjeta de distribución
mentación
de alimentación eléctrica en la página 87
E
Alimentación de sistema
F
Placa de interfaz de contactor Solución de problemas de la tarjeta de interfaz de
contactores en la página 92
G
Sistema de accionamiento
Solución de problemas de alimentación eléctrica
del sistema en la página 81
Solución de problemas del sistema de accionamiento en la página 77
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
67
4 Resolución de problemas por unidades
4.1 Solución de problemas de los LED del controlador
Continuación
H
Tarjeta de panel
Solución de problemas de la tarjeta de panel en
la página 75
J
Ordenador de ejes
Solución de problemas del ordenador de ejes en
la página 79
Tarjeta de LEDs
El funcionamiento de los LEDs de la tarjeta de LEDs son idénticos a los de la tarjeta
de panel, consulte la sección Solución de problemas de la tarjeta de panel en la
página 75.
Si la tarjeta de LEDs no funciona pero la tarjeta de panel sí lo hace, el problema
se debe a la comunicación entre estas tarjetas o a la propia tarjeta de LEDs.
Compruebe los cables que las unen.
68
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.2 Solución de problemas de FlexPendant
4.2 Solución de problemas de FlexPendant
Generalidades
El FlexPendant se comunica a través de la tarjeta de panel con el ordenador
principal. El FlexPendant está conectado físicamente a la tarjeta de panel mediante
un cable que incorpora una alimentación de +24 V y dos cadenas de dispositivo
de habilitación y de paro de emergencia.
Procedimiento
El procedimiento siguiente detalla qué debe hacer si el FlexPendant no funciona
correctamente.
Acción
Información/figura
1
Si el FlexPendant no responde en absoluto, continúe tal como se detalla en la sección Problema al
poner en marcha el FlexPendant en la página 52.
2
Si el FlexPendant se pone en marcha pero no funciona correctamente, continúe tal como se detalla
en la sección Problema al conectar el FlexPendant
al controlador en la página 53.
3
Si el FlexPendant se pone en marcha, parece funcionar pero muestra mensajes de evento erráticos,
siga los pasos detallados en la sección Mensajes
de evento erráticos en el FlexPendant en la página 54.
4
Compruebe las conexiones y la integridad de los
cables.
5
Compruebe la alimentación de 24 V.
6
Lea el mensaje del registro de eventos de error y
siga las instrucciones de las referencias.
Reinicio de un FlexPendant bloqueado
Si el FlexPendant se queda bloqueado por un error de software o un uso
inadecuado, puede desbloquearlo con el joystick o con el botón de restablecimiento
(situado en la parte posterior del FlexPendant con puerto USB).
Utilice este procedimiento para desbloquear el FlexPendant con ayuda del joystick.
Acción
Información
1
Mueva el joystick tres veces hacia la derecha, incli- Debe mover el joystick hasta su
nándolo completamente.
tope. Por tanto, debe usar movimientos lentos y claros.
2
Mueva el joystick una vez hacia la izquierda, inclinándolo completamente.
3
Mueva el joystick una vez hacia abajo, inclinándolo
completamente.
4
Aparece una ventana de diálogo. Toque Restable- El FlexPendant se reinicia.
cer.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
69
4 Resolución de problemas por unidades
4.3 Solución de problemas de comunicaciones
4.3 Solución de problemas de comunicaciones
Descripción general
En esta sección se detalla cómo solucionar los problemas de comunicaciones de
datos de los módulos de control y accionamiento.
Procedimiento de solución de problemas
A la hora de solucionar los problemas de comunicaciones, siga el procedimiento
general detallado a continuación:
Acción
70
Información/figuras
1
Cables defectuosos (por ejemplo, las señales de envío
y recepción están intercambiadas).
2
Velocidades de transferencia (número de baudios).
3
Tamaños de datos mal configurados
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.4 Solución de problemas de los buses de campo y las unidades de E/S
4.4 Solución de problemas de los buses de campo y las unidades de E/S
Más información
La información acerca de cómo solucionar problemas de los buses de campo y
las unidades de E/S se encuentra en el manual del bus de campo o la unidad de
E/S correspondiente.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
71
4 Resolución de problemas por unidades
4.5 Solución de problemas en la unidad informática
4.5 Solución de problemas en la unidad informática
Piezas de la unidad de ordenadores
La figura siguiente muestra la ubicación de las piezas de la unidad de ordenadores.
C
D
E
F
A
B
xx1300000851
Descripción
Tipo
A
Unidad de ordenadores
DSQC1000 o DSQC1018
B
Memoria de almacenamiento con cargador de
arranque 2 GB
-
C
Tarjeta de expansión completa
DSQC1003
D
Adaptador de bus de campo esclavo PROFINET DSQC 688
D
Adaptador de bus de campo esclavo PROFIBUS DSQC 667
D
Adaptador de bus de campo esclavo Ethernet/IP DSQC 669
D
Adaptador de bus de campo esclavo DeviceNet DSQC1004
E
DeviceNet Master/Slave PCIexpress
DSQC1006
E
PROFIBUS-DP Master/Slave PCIexpress
DSQC1005
F
Ventilador con toma
-
Para más información y ver las referencias, consulte Manual del producto - IRC5.
Continúa en la página siguiente
72
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.5 Solución de problemas en la unidad informática
Continuación
LEDs
La figura siguiente muestra los LEDs de la unidad de ordenadores:
xx1300000857
Descripción
Significado
POWER
(verde)
Puesta en marcha normal:
• APAGADO, durante una puesta en marcha normal el LED está
apagado hasta que se inicia el módulo COM Express del interior
de la unidad de ordenadores.
• ENCENDIDO FIJO, tras completar la puesta en marcha el LED
aparece encendido y fijo.
Fallo durante la puesta en marcha (apagado entre parpadeos). De uno
a cuatro parpadeos breves, un segundo apagado. Esto se repite hasta
que se apaga.
• Fallo interno de alimentación, FPGA, y/o el módulo COM Express.
• Sustituya la unidad de ordenadores.
Fallo de alimentación durante el tiempo de ejecución (destellos rápidos
entre parpadeos). De uno a cinco parpadeos, 20 destellos rápidos. Esto
se repite hasta que se apaga.
• Descenso temporal de tensión, apague y encienda la alimentación
del controlador.
• Compruebe la tensión de la fuente de alimentación a la unidad
de ordenadores.
• Sustituya la unidad de ordenadores.
DISC-Act
(amarillo)
(Actividad del disco)
Indica que el ordenador está escribiendo en la tarjeta SD.
STATUS
(rojo/verde)
Secuencia de puesta en marcha:
1 ROJO FIJO, cargando el cargador de arranque.
2 ROJO PARPADEANTE, cargando la imagen.
3 VERDE PARPADEANTE, cargando RobotWare.
4 VERDE FIJO, sistema preparado.
Indicación de fallo:
• ROJO FIJO permanente, compruebe la tarjeta SD.
• ROJO PARPADEANTE permanente, compruebe la tarjeta SD.
• VERDE PARPADEANTE permanente, consulte los mensajes de
error de FlexPendant o CONSOLE.
NS
(rojo/verde)
(Estado de red)
No se usa.
MS
(rojo/verde)
(Estado de módulo)
No se usa.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
73
4 Resolución de problemas por unidades
4.5 Solución de problemas en la unidad informática
Continuación
Para obtener información acerca de los LEDs en el adaptador de bus de campo
esclavo AnybusCC y la tarjeta de bus de campo maestro/esclavo PCIExpress,
consulte el manual del bus de campo correspondiente.
74
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.6 Solución de problemas de la tarjeta de panel
4.6 Solución de problemas de la tarjeta de panel
Ubicación
La unidad de tarjeta de panel, DSQC 643, se encuentra en el lugar indicado en la
figura.
A
B
C
D
E
xx1300000679
A
Panel de control
B
Unidad de ordenadores
C
Sistema de accionamiento
D
Ordenador de ejes
E
Unidad de placa de panel
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
75
4 Resolución de problemas por unidades
4.6 Solución de problemas de la tarjeta de panel
Continuación
LEDs
La figura siguiente muestra los LEDs de la tarjeta de panel:
A
xx0400001076
A
LEDs de la tarjeta de panel
Los LEDs de la tarjeta de panel se describen a continuación, en orden de arriba
abajo.
76
Descripción
Significado
LED de estado
VERDE parpadeante: Error de comunicación serie.
VERDE fijo: No se ha detectado ningún error y el sistema está en
funcionamiento.
ROJO parpadeante: El sistema se encuentra en el modo de encendido/autocomprobación.
ROJO fijo: Otro error distinto de un error de comunicación serie.
LED de indicación,
ES1
AMARILLO si la cadena 1 de paro de emergencia (ES) está cerrada
LED de indicación,
ES2
AMARILLO si la cadena 2 de paro de emergencia (ES) está cerrada
LED de indicación,
GS1
AMARILLO si la cadena 1 de interruptores de paro general (GS)
está cerrada
LED de indicación,
GS2
AMARILLO si la cadena 2 de interruptores de paro general (GS)
está cerrada
LED de indicación,
AS1
AMARILLO si la cadena 1 de interruptores de paro automático (AS)
está cerrada
LED de indicación,
AS2
AMARILLO si la cadena 2 de interruptores de paro automático (AS)
está cerrada
LED de indicación,
SS1
AMARILLO si la cadena 1 de interruptores de paro superior (SS)
está cerrada
LED de indicación,
SS2
AMARILLO si la cadena 2 de interruptores de paro superior (SS)
está cerrada
LED de indicación,
EN1
AMARILLO si ENABLE1=1 y la comunicación RS funciona correctamente.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.7 Solución de problemas del sistema de accionamiento
4.7 Solución de problemas del sistema de accionamiento
Ubicación
La ilustración muestra la ubicación de las unidades de accionamiento en el
controlador.
A
B
C
D
xx1300000808
A
Unidad rectificadora adicional (sólo se utiliza con ejes adicionales en combinación con robots pequeños)
B
Unidad de accionamiento principal para robots pequeños
C
Unidad de accionamiento principal para robots grandes
D
Unidades de accionamiento adicionales (para ejes adicionales)
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
77
4 Resolución de problemas por unidades
4.7 Solución de problemas del sistema de accionamiento
Continuación
LEDs
La figura siguiente muestra los LEDs indicadores de la unidad de accionamiento
principal y las unidades de accionamiento adicionales.
xx0800000486
A
Unidad de accionamiento principal
B
LEDs de Ethernet de la unidad de accionamiento principal
C
Unidad de accionamiento adicional
D
LEDs de Ethernet de las unidades de accionamiento adicionales
Descripción
Significado
LEDs de Ether- Muestra el estado de la comunicación de Ethernet entre un ordenador
net (B y D)
de ejes adicional (2, 3 ó 4) y la tarjeta de Ethernet.
• VERDE apagado: Se ha seleccionado la velocidad de datos de 10
Mbps.
• VERDE encendido: Se ha seleccionado la velocidad de datos de
100 Mbps.
• AMARILLO parpadeante: Las dos unidades se comunican a través
del canal de Ethernet.
• AMARILLO fijo: Se ha establecido un enlace de red local.
• AMARILLO apagado: No se ha establecido un enlace de red local.
78
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.8 Solución de problemas del ordenador de ejes
4.8 Solución de problemas del ordenador de ejes
Ubicación
La figura siguiente muestra la ubicación del ordenador de ejes, DSQC 668, en el
controlador.
A
xx1300000809
A
Ordenador de ejes
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
79
4 Resolución de problemas por unidades
4.8 Solución de problemas del ordenador de ejes
Continuación
LEDs
La figura siguiente muestra los LEDs del ordenador de ejes:
xx0800000485
A
LED de estado
B
LED de Ethernet
Descripción
Significado
LED de estado
Secuencia normal durante la puesta en marcha:
1 ROJO fijo: Predeterminado en el momento del encendido.
2 ROJO parpadeante: Establecimiento de la conexión con el ordenador principal y carga de programa en el ordenador de ejes.
3 VERDE parpadeante: Puesta en marcha del programa del ordenador de ejes y conexión de las unidades periféricas.
4 VERDE fijo: Secuencia de puesta en marcha lista. La aplicación
está en marcha.
Las siguientes situaciones indican errores:
• APAGADO: No llega alimentación al ordenador de ejes, o error
interno (de hardware/firmware).
• ROJO fijo (permanente): El ordenador de ejes no ha conseguido
inicializar el hardware básico.
• ROJO parpadeante (permanente): Falta la conexión con el ordenador principal, problema de puesta en marcha del ordenador
principal o problema de instalación de RobotWare.
• VERDE parpadeante (permanente): Faltan las conexiones con las
unidades periféricas o problema de inicio de RobotWare.
LED de Ethernet Muestra el estado de la comunicación de Ethernet entre un ordenador
de ejes adicional (2, 3 ó 4) y la tarjeta de Ethernet.
• VERDE apagado: Se ha seleccionado la velocidad de datos de 10
Mbps.
• VERDE encendido: Se ha seleccionado la velocidad de datos de
100 Mbps.
• AMARILLO parpadeante: Las dos unidades se comunican a través
del canal de Ethernet.
• AMARILLO fijo: Se ha establecido un enlace de red local.
• AMARILLO apagado: No se ha establecido un enlace de red local.
80
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.9 Solución de problemas de alimentación eléctrica del sistema
4.9 Solución de problemas de alimentación eléctrica del sistema
Ubicación
La figura siguiente muestra la ubicación de la fuente de alimentación del sistema,
DSQC 661, en el controlador.
A
B
C
xx1300000813
A
Fuente de alimentación de I/O del usuario
B
Tarjeta de distribución de alimentación
C
Alimentación de sistema
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
81
4 Resolución de problemas por unidades
4.9 Solución de problemas de alimentación eléctrica del sistema
Continuación
LEDs
en1000000041
A
Indicador de DC OK
Descripción
Significado
Indicador de DC VERDE: Si todas las salidas de CC se encuentran por encima de los niveOK
les mínimos especificados.
APAGADO: Si una o varias de las salidas de CC se encuentran por debajo
del nivel mínimo especificado.
Equipo de prueba necesario
Equipo necesario para la solución de problemas
•
Ohmímetro
•
Carga resistiva (por ejemplo en el ordenador principal en +24V_PC)
•
Voltímetro
Preparativos
Acción
1
Busque errores y avisos en el FlexPendant.
2
Asegúrese de que la fuente de alimentación del sistema de control se encuentre en
el modo de funcionamiento.
Para ello, espere 30 segundos tras el encendido.
Continúa en la página siguiente
82
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.9 Solución de problemas de alimentación eléctrica del sistema
Continuación
Procedimiento de solución de problemas
La tabla de solución de problemas ha sido concebida para usarla como un conjunto
detallado de instrucciones junto con el diagrama de flujo para la solución de
problemas.
Prueba
Nota
Acción
1
Compruebe el LED El LED indicador está identi- El LED está:
indicador de la unidad ficado como DC OK.
• VERDE, la unidad DSQC
DSQC 661.
661 debe funcionar correctamente.
• PARPADEANDO EN VERDE, es posible que la salida
de CC no esté conectada
a ninguna unidad (carga) o
que exista un cortocircuito
en la salida. Continúe en el
paso 2.
• APAGADO, o bien la unidad DSQC 661 está defectuosa o su tensión de entrada es insuficiente. Continúe en el paso 4.
2
Compruebe la conexión entre la salida de
CC y la unidad conectada.
Asegúrese de que la fuente
de alimentación esté conectada a la unidad DSQC 662.
Se requiere una carga mínima de 2 A en el conector de
salida de CC para que la
unidad DSQC 661 funcione
correctamente.
Si la conexión se encuentra en
buen estado, continúe en el paso
3.
Si la conexión está defectuosa o
la fuente de alimentación no está
conectada a la unidad DSQC 662,
repare la conexión o conéctela.
Compruebe que el fallo haya sido
eliminado y repita estas indicaciones en caso necesario.
3
Compruebe si hay al- Compruebe el conector X2
gún cortocircuito en de salida de CC de la unidad
la salida de CC.
DSQC 661 y el conector X1
de entrada de la unidad
DSQC 662.
Mida la resistencia entre los
pines de tensión y la masa.
La resistencia no debe ser
inferior a 10 ohmios.
Si no encuentra ningún cortocircuito, continúe en el paso 4.
Si encuentra algún cortocircuito
en la unidad DSQC 661, continúe
en el paso 10.
Si encuentra un cortocircuito en
la unidad DSQC 662, corrija la situación en la unidad. Compruebe
que el fallo haya sido eliminado y
repita estas indicaciones en caso
necesario.
Nota
No mida la resistencia entre
los pines. Los pines dobles
se utilizan tanto para la alimentación como para masa.
El conector X2 de salida de
CC se muestra en el Diagrama de circuitos de Manual
del producto - IRC5.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
83
4 Resolución de problemas por unidades
4.9 Solución de problemas de alimentación eléctrica del sistema
Continuación
Prueba
Nota
Acción
4
Mida la tensión de CC
mientras la salida está conectada a la unidad DSQC 662 o a
otra carga.
La unidad DSQC 661 requiere una carga mínima de 2 A
para suministrar +24 V.
Mida la tensión con un voltímetro en el conector X2 de
salida de CC. La tensión debe ser: +24 V < U < +27 V.
Si la tensión medida en la
carga se reduce por debajo
de los +24 V, existe caída de
tensión en los cables y los
conectores.
El conector X2 de salida de
CC se muestra en el Diagrama de circuitos de Manual
del producto - IRC5.
Si detecta la tensión correcta y el
LED DC OK presenta el color verde, quiere decir que la fuente de
alimentación funciona correctamente.
Si detecta la tensión correcta y el
LED DC OK está apagado, la
fuente de alimentación se considera defectuosa pero no es necesario reemplazarla al instante.
Si no se detecta tensión o ésta es
incorrecta, continúe en el paso 5.
5
Mida la tensión de
Mida la tensión con un voltíentrada de la unidad metro. La tensión debe ser:
DSQC 661.
172 < U < 276 V.
El conector X1 de entrada de
CA se muestra en el Diagrama de circuitos de Manual
del producto - IRC5.
Si la tensión de entrada es correcta, continúe en el paso 10.
Si no se detecta tensión de entrada o ésta es incorrecta, continúe
en el paso 6.
6
Compruebe los inte- Asegúrese de que estén cerruptores Q1-2.
rrados.
Su ubicación física se muestra en el diagrama de circuitos de Manual del producto - IRC5.
Si los interruptores están cerrados, continúe en el paso 7.
Si los interruptores están abiertos,
ciérrelos. Compruebe que el fallo
haya sido eliminado y repita estas
indicaciones en caso necesario.
7
Compruebe el fusible
principal F2 y el fusible opcional F6 si se
usa.
Si los fusibles están abiertos,
continúe en el paso 8.
Si los fusibles están cerrados,
ábralos. Compruebe que el fallo
haya sido eliminado y repita estas
indicaciones en caso necesario.
8
Asegúrese de que la
tensión de entrada al
armario sea la correcta para ese armario
en concreto.
9
Compruebe los cables.
Asegúrese de que estén
abiertos.
Su ubicación física se muestra en el diagrama de circuitos de Manual del producto - IRC5.
Si la tensión de entrada es correcta, continúe en el paso 9.
Si la tensión de entrada es incorrecta, ajústela. Compruebe que
el fallo haya sido eliminado y repita estas indicaciones en caso necesario.
Asegúrese de que los cables
estén conectados correctamente y que no estén defectuosos.
Si los cables están en buen estado, es probable que el problema
se deba al transformador T1 o al
filtro de entrada. Intente poner en
funcionamiento la alimentación.
Compruebe que el fallo haya sido
eliminado y repita estas indicaciones en caso necesario.
Si encuentra cables desconectados o defectuosos, conéctelos o
repárelos. Compruebe que el fallo
haya sido eliminado y repita estas
indicaciones en caso necesario.
Continúa en la página siguiente
84
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.9 Solución de problemas de alimentación eléctrica del sistema
Continuación
Prueba
Nota
Acción
10 Si la unidad DSQC
La forma de sustituir la uni661 puede estar de- dad se detalla en Manual del
fectuosa, sustitúyala producto - IRC5.
y verifique que el fallo
haya quedado solucionado.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
85
4 Resolución de problemas por unidades
4.9 Solución de problemas de alimentación eléctrica del sistema
Continuación
Diagrama de flujo de solución de problemas
1. DC OK LED
DSCQC 661
VERDE
PARPADEANTE
APAGADO
Conexiones 2. Comprobar
incorrectas conexiones de
Corregir
conexiones
salida
No hay
Conexiones
correctas cortocircuito
VERDE
Nivel CC
correcto
4. Medir salida CC
Nivel CC
incorrecto
Cortocircuito en
unidades 3. Comprobar si hay
Reparar
Cortocircuito en
cortocircuitos en
cortocircuito
salidas
salidas
Nivel CA
Nivel CA
Interruptores
correcto
7. Comprobar cerrados 6. Comprobar incorrecto 5. Medir entrada
interruptores Q1-2
CA
fusibles F2 (F6)
Fusibles
cerrados
Fusibles
abiertos
Fusibles
abiertos
Interruptores
abiertos
Cerrar
8. Medir CA a interruptores
armario
Q1-2
CA
correcto
CA
incorrecto
9.
entrada
Comprobar Ajustar
de CA
cables
Cables
defectuosos
10. Sustituir DSQC
661
Cables
correctos
Reparar
cables
Causa probable de
avería:
transformador T1 o
filtro
Unidad de
alimentación
funciona
correctamente
xx1200001313
86
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.10 Solución de problemas de la tarjeta de distribución de alimentación eléctrica
4.10 Solución de problemas de la tarjeta de distribución de alimentación eléctrica
Ubicación
La tarjeta de distribución de alimentación, DSQC 662, está situada en el lado
izquierdo, como se muestra en la figura siguiente.
A
B
C
xx1300000813
A
Fuente de alimentación de I/O del usuario
B
Tarjeta de distribución de alimentación
C
Alimentación de sistema
¡CUIDADO!
Superficie caliente en la parte superior de la unidad de tarjeta de distribución de
alimentación.
Riesgo de quemaduras. Tenga cuidado al retirar la unidad.
No encamine ni haga pasar los cables por la parte superior de la tarjeta de
distribución de alimentación.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
87
4 Resolución de problemas por unidades
4.10 Solución de problemas de la tarjeta de distribución de alimentación eléctrica
Continuación
LEDs
A
en1000000042
A
Indicador DCOK
Descripción
Significado
Indicador DCOK VERDE: Si la salida de CC se encuentra por encima del nivel mínimo especificado.
APAGADO: Si la salida de CC se encuentra por debajo del nivel mínimo
especificado.
Equipo de prueba necesario
Equipo necesario para la solución de problemas
•
Ohmímetro
•
Carga resistiva (por ejemplo en el ordenador principal en +24V_PC)
•
Voltímetro
Preparativos
Acción
Nota
1
Busque errores y avisos en el FlexPendant.
2
Asegúrese de que la tarjeta de distribución de alimentación se encuentre en el modo de funcionaNota
miento.
Al cortar la alimentación de CA,
Para ello, espere 1 minuto tras el encendido.
el LED indicador (LED Status) de
la unidad DSQC 662 cambia al
color rojo y se mantiene en rojo
hasta que se vacíe el UltraCAP.
Esta operación puede requerir un
largo tiempo y es completamente
normal. No significa que haya
ningún problema en la unidad
662.
Continúa en la página siguiente
88
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.10 Solución de problemas de la tarjeta de distribución de alimentación eléctrica
Continuación
Procedimiento de solución de problemas
La tabla de solución de problemas ha sido concebida para usarla como un conjunto
detallado de instrucciones junto con el diagrama de flujo para la solución de
problemas.
Prueba
Nota
Acción
1
Compruebe el LED
indicador de la unidad DSQC 662.
El LED indicador está identi- El LED está:
ficado como LED Status.
• VERDE, la unidad DSQC
662 debe funcionar correctamente.
• PARPADEANDO EN VERDE, quiere decir que se ha
producido un error de comunicación USB. Continúe en
el paso 2.
• ROJO, la tensión de entrada o salida es insuficiente
y/o la señal lógica ACOK_N
tiene el nivel alto. Continúe
en el paso 4.
• PARPADEANDO EN ROJO,
una o varias salidas de CC
presentan un nivel de tensión por debajo del especificado. Asegúrese de que
los cables estén conectados correctamente a sus
unidades correspondientes.
Continúe en el paso 4.
• PARPADEANDO EN VERDE Y ROJO, quiere decir
que se ha producido un
error de actualización de
firmware. Esto no debería
ocurrir durante el modo de
funcionamiento; continúe
en el paso 6.
• APAGADO, o bien la unidad DSQC 662 está defectuosa o su tensión de entrada es insuficiente. Continúe
en el paso 4.
2
Compruebe la conexión USB en ambos
extremos.
Si la conexión parece encontrarse
en buen estado, continúe en el
paso 6.
Si existe algún problema con la
conexión, continúe en el paso 3.
3
Intente corregir la co- Asegúrese de que el cable
municación entre la USB esté conectado correcfuente de alimenta- tamente en ambos extremos.
ción y el ordenador,
reconectando el cable.
Si la comunicación se recupera,
compruebe que el fallo haya sido
eliminado y repita estas indicaciones en caso necesario.
Si no consigue restablecer la comunicación, continúe en el paso
6.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
89
4 Resolución de problemas por unidades
4.10 Solución de problemas de la tarjeta de distribución de alimentación eléctrica
Continuación
Prueba
Nota
Acción
4
Desconecte una sali- Asegúrese de que haya al
da de CC cada vez y menos una unidad conectamida su tensión.
da en todo momento. Se requiere una carga mínima de
0,5-1 A en al menos una salida para que la unidad DSQC
662 funcione correctamente.
Mida la tensión con un voltímetro. La tensión debe ser:
+24 V < U < +27 V.
Las salidas de CC se muestran en el diagrama de circuitos de Manual del producto - IRC5.
Si detecta la tensión correcta en
todas las salidas y el LED Status
presenta el color verde, quiere
decir que la fuente de alimentación funciona correctamente.
Si detecta la tensión correcta en
todas las salidas y el LED Status
NO presenta el color verde, la
fuente de alimentación se considera defectuosa pero no es necesario reemplazarla al instante.
Si no se detecta tensión o ésta es
incorrecta, continúe en el paso 5.
5
Mida la tensión de
entrada de la unidad
DSQC 662 y la señal
ACOK_N.
Si la tensión de entrada es correcta, continúe en el paso 6.
Si no se detecta tensión de entrada o ésta es incorrecta, realice la
solución de problemas de la unidad DSQC 661.
6
Si la unidad DSQC La forma de sustituir la uni662 puede estar de- dad se detalla en Manual del
fectuosa, sustitúyala producto - IRC5.
y verifique que el fallo haya quedado solucionado.
Mida la tensión con un voltímetro. La tensión de entrada
debe ser: 24 < U < 27 V y
ACOK_N debe ser 0 V.
Asegúrese de que los conectores X1 y X2 estén conectados correctamente a ambos
extremos.
El conector X1 de entrada de
CC y el conector X2 ACOK_N
se muestran en el Diagrama
de circuitos de Manual del
producto - IRC5.
Continúa en la página siguiente
90
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.10 Solución de problemas de la tarjeta de distribución de alimentación eléctrica
Continuación
Diagrama de flujo de solución de problemas
1. DC OK LED
DSCQC 662
ROJO-VERDE
VERDE
PARPADEANTEPARPADEANTE APAGADO
ROJO
PARPADEANTE
Error de
comunicación Error de
USB
actualización de
firmware
Salidas
bajas
2. Comprobar
conexión USB
Conexión
correcta
No
conectadoConectado
3. Corregir
conexión
ROJO
VERDE
Entrada/salida
CC baja
4. Medir
salidas CC
Nivel CC correcto
Nivel CC
incorrecto
24 V
5. Medir entrada
incorrectos
24 V CC y AC
correcto
24 V
correctos
Problema
con USB
6. Sustituir
DSQC 662
Solucionar
problemas de
DSQC 661
Unidad de
alimentación
funciona
correctamente
xx1200001314
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
91
4 Resolución de problemas por unidades
4.11 Solución de problemas de la tarjeta de interfaz de contactores
4.11 Solución de problemas de la tarjeta de interfaz de contactores
Ubicación
La figura siguiente muestra la ubicación de la tarjeta de interfaz de contactores,
DSQC 611, en el controlador.
A
B
C
D
E
xx0400001058
A
Contactor MOTORS ON K42
B
Contactor MOTORS ON K43
C
Contactor de freno
D
Puentes (3 unidades)
E
Placa de interfaz de contactor
LEDs
La figura siguiente muestra los LEDs de la tarjeta de interfaz de contactores:
A
xx0400001091
A
LED de estado
Continúa en la página siguiente
92
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.11 Solución de problemas de la tarjeta de interfaz de contactores
Continuación
Descripción
LED de estado
VERDE parpadeante: Error de comunicación serie.
VERDE fijo: No se ha detectado ningún error y el sistema está en
funcionamiento.
ROJO parpadeante: El sistema se encuentra en el modo de encendido/autocomprobación.
ROJO fijo: Otro error distinto de un error de comunicación serie.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
93
4 Resolución de problemas por unidades
4.12 Solución de problemas de alimentación eléctrica de E/S del usuario
4.12 Solución de problemas de alimentación eléctrica de E/S del usuario
Ubicación
La fuente de alimentación de E/S del usuario, DSQC 609, se encuentra en el lugar
indicado en la figura siguiente.
A
B
C
xx1300000813
A
Fuente de alimentación de I/O del usuario
B
Tarjeta de distribución de alimentación
C
Alimentación de sistema
¡CUIDADO!
Si hay dos o más unidades de alimentación de E/S del usuario montadas en fila
o demasiado cercanas entre sí, existirá un problema de calentamiento y las
unidades pueden resultar dañadas.
Para evitar daños en las unidades de alimentación de E/S del usuario, las
unidades deben estar separadas por 3 unidades de soporte exterior.
Continúa en la página siguiente
94
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
4 Resolución de problemas por unidades
4.12 Solución de problemas de alimentación eléctrica de E/S del usuario
Continuación
LEDs
La figura siguiente muestra los LEDs del módulo de fuente de alimentación de
usuario:
A
en1000000037
A
Indicador DCOK
Descripción
Significado
Indicador DCOK VERDE: Si todas las salidas de CC se encuentran por encima de los niveles mínimos especificados.
APAGADO: Si una o varias de las salidas de CC se encuentran por debajo
del nivel mínimo especificado.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
95
Esta página se ha dejado vacía intencionadamente
5 Solución de problemas con ayuda de los registros de eventos
5.1 Mensajes del registro de eventos
5 Solución de problemas con ayuda de los registros de
eventos
5.1 Mensajes del registro de eventos
Tipo de mensajes de registro de eventos
El IRC5 admite tres tipos de mensajes de registro de eventos:
Tipo
Descripción
Información Estos mensajes se utilizan para registrar información en el registro de eventos,
pero no requieren acciones específicas por parte del usuario. Los mensajes
informativos no reciben el foco en ningún dispositivo de visualización del
controlador.
Aviso
Estos mensajes se utilizan para recordar al usuario que hay algo no necesariamente correcto en el sistema, pero que el funcionamiento continúa. Estos
mensajes se añaden al registro de eventos pero no reciben el foco en ningún
dispositivo de visualización.
Error
Estos mensajes indican que existe algún problema grave en el sistema y que
el funcionamiento se detiene. Se utilizan cuando se requiere una acción inmediata por parte del usuario.
Nota
El tipo de mensaje no está contenido en el texto del mensaje en sí sino en el
propio código en el momento de la generación del mensaje. Los mensajes sólo
pueden aparecer como un tipo y deben escribirse para proporcionar información
acerca de su tipo.
Nota
La versión de los registros de eventos traducidos mostrados en los manuales
traducidos puede diferir levemente de la versión inglesa debido a correcciones
de última hora.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
97
5 Solución de problemas con ayuda de los registros de eventos
5.2 Cómo leer los mensajes del registro de eventos de RAPID
5.2 Cómo leer los mensajes del registro de eventos de RAPID
Series de números de evento
Los mensajes de eventos se dividen en los siguientes grupos, en función de la
parte del sistema de robot a la que se refieran.
Nota
No todos los mensajes del registro de eventos están traducidos a todos los
idiomas. Sin embargo, la versión en inglés del manual contiene todos los
mensajes del registro de eventos que están incluidos en la versión relacionada
de RobotWare.
Serie de números Tipo de evento
1 xxxx
Eventos de manejo; eventos relacionados con el manejo del sistema.
2 xxxx
Eventos de sistema; eventos relacionados con las funciones del sistema,
los estados del sistema, etc.
3 xxxx
Eventos de hardware; eventos relacionados con el hardware del sistema,
los manipuladores y el hardware del controlador.
4 xxxx
Eventos de programa; eventos relacionados con las instrucciones de
RAPID, los datos, etc.
5 xxxx
Eventos de movimiento; eventos relacionados con el control de los
movimientos del manipulador y el posicionamiento.
7 xxxx
Eventos de E/S; eventos relacionados con las entradas y salidas, los
buses de datos, etc.
8 xxxx
Eventos de usuario; eventos definidos por el usuario
9 xxxx
Eventos de seguridad funcional; eventos relacionados con la seguridad
funcional.
Continúa en la página siguiente
98
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.2 Cómo leer los mensajes del registro de eventos de RAPID
Continuación
Serie de números Tipo de evento
11 xxxx
Eventos de proceso; eventos específicos de las aplicaciones, la soldadura al arco, la soldadura por puntos, etc.
0001 - 0199 Continous Application Platform
0200 - 0399 Discrete Application Platform
0400 - 0599 Arc
0600 - 0699 Spot
0700 - 0799 Bosch
0800 - 0899 Dispense
1000 - 1200 Pick and Place
1400 - 1499 Production manager
1500 - 1549 BullsEye
1550 - 1599 SmartTac
1600 - 1699 Production Monitor
1700 - 1749 TorchClean
1750 - 1799 Navigator
1800 - 1849 Arcitec
1850 - 1899 MigRob
1900 - 2399 PickMaster RC
2400 - 2449 AristoMig
2500 - 2599 Weld Data Monitor
2600 - 2649 GSI
2700 - 2702 Integrated Vision
4800 - 4814 Miscellaneous Process
12 xxxx
Eventos de configuración; eventos relacionados con la configuración
del sistema.
13 xxxx
Paint
15 xxxx
RAPID
17 xxxx
Registros de eventos de Connected Service Embedded que se generan
durante la puesta en marcha, el registro, la eliminación del registro, la
pérdida de conectividad, etc.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
99
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
5.3 1 xxxx
10002, Puntero de programa restablecido
10012, Estado de paro protegido
Descripción
El puntero de programa de la tarea arg se ha restablecido.
Descripción
El sistema se encuentra en el estado de parada protegida. Entra
Consecuencias
En el momento del inicio, la ejecución del programa empezará
por la primera instrucción de la rutina de entrada de la tarea.
¡RECUERDE que es posible que el manipulador se mueva hasta
una posición inesperada en el momento del inicio!
en este estado después de pasar del modo automático al
manual o si el circuito Motores ON ha sido abierto por una
parada de emergencia, una parada general, una parada
automática o una parada superior; o en modo manual si se ha
liberado el dispositivo de habilitación.
Causas probables
Es posible que el operador haya solicitado manualmente esta
Consecuencias
No podrá realizar ninguna operación hasta cerrar el circuito
acción.
Motores ON. Entretanto los ejes del manipulador se mantienen
10009, Memoria de trabajo llena
en su posición mediante frenos mecánicos de sujeción.
Causas probables
Descripción
Alguno de los dispositivos de seguridad conectados a las
La tarea arg no tiene más memoria para las nuevas
instrucciones de RAPID o los nuevos datos.
Acciones recomendadas
entradas de paro del sistema se ha abierto. Se muestran en el
Diagrama de circuitos.
Acciones recomendadas
Guarde el programa y reinicie el sistema.
10010, Estado de Motores OFF
Compruebe cuál de los dispositivos de seguridad ha provocado
el paro. Cierre el dispositivo. Para reanudar el funcionamiento,
devuelva el sistema al estado Motores ON.
Descripción
El sistema se encuentra en el estado Motores OFF. Entra en
este estado después de pasar del modo manual al automático
o si el circuito Motores ON se ha abierto durante la ejecución
del programa.
10013, Estado de paro de emergencia
Descripción
El sistema se encuentra en el estado de paro de emergencia,
dado que el circuito Motors ON ha sido abierto por un
Consecuencias
dispositivo de paro de emergencia.
No podrá realizar ninguna operación hasta cerrar el circuito
Motores ON. Entretanto los ejes del manipulador se mantienen
en su posición mediante frenos mecánicos de sujeción.
10011, Estado de Motores ON
Consecuencias
Toda la ejecución de programas, y con ello las acciones del
robot, se detienen inmediatamente. Entretanto los ejes del robot
se mantienen en su posición mediante frenos mecánicos de
sujeción.
Descripción
Causas probables
El sistema se encuentra en el estado Motores ON.
Alguno de los dispositivos de paro de emergencia conectados
Consecuencias
a la entrada de paro de emergencia se ha abierto. Puede
El circuito Motores ON se ha cerrado, lo que ha activado la
tratarse de dispositivos internos (del controlador o del
alimentación a los motores del manipulador. Puede reanudar
FlexPendant) o externos (conectados por el creador de
el funcionamiento normal.
sistemas). Los dispositivos internos se muestran en el Diagrama
de circuitos.
Acciones recomendadas
Compruebe cuál de los dispositivos de paro de emergencia ha
provocado el paro. Cierre o restablezca el dispositivo. Para
Continúa en la página siguiente
100
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
reanudar el funcionamiento, devuelva el sistema al estado
Motores ON presionando este botón del Control Module.
10014, Estado de fallo de sistema
Descripción
10018, Modo manual a velocidad máxima
solicitado
Descripción
Se ha solicitado al sistema que pase al modo manual sin
restricciones de velocidad.
La ejecución de todas las tareas de tipo NORMAL se ha
detenido a causa de un problema de funcionamiento.
Consecuencias
El sistema pasará al modo manual a velocidad máxima.
Consecuencias
No será posible iniciar ningún programa ni realizar movimientos
manuales en el manipulador hasta que se reinicie el sistema.
10019, Modo manual a velocidad total confirmado
Descripción
Causas probables
El sistema se encuentra en el modo manual sin restricciones
Existe un gran número de problemas de funcionamiento que
de velocidad.
pueden provocar este estado. ¡Utilice el FlexPendant o
RobotStudio para comprobar los demás mensajes del registro
de eventos y encontrar otros eventos que se hayan producido
al mismo tiempo!
Consecuencias
El funcionamiento programado es posible mientras se presiona
el botón Hold-to-run del FlexPendant. También es posible mover
manualmente el manipulador, después de presionar el
Acciones recomendadas
dispositivo de habilitación del FlexPendant.
Determine las causas del paro, con ayuda del registro de
eventos. Solucione el fallo. Reinicie el sistema de la forma
10020, Estado de error de ejecución
detallada en el Manual del operador.
Descripción
10015, Modo manual seleccionado
La ejecución del programa de la tarea arg se ha detenido a
causa de un error espontáneo.
Descripción
El sistema se encuentra en el modo manual.
Consecuencias
Consecuencias
No podrá ejecutar ningún programa hasta haber eliminado el
error.
Es posible realizar operaciones programadas, pero únicamente
a una velocidad máxima de 250 mm/s. También es posible
mover manualmente el manipulador, después de presionar el
dispositivo de habilitación del FlexPendant.
10016, Modo automático solicitado
Descripción
Causas probables
Existe un gran número de problemas de funcionamiento que
pueden provocar este estado. ¡Utilice el FlexPendant o
RobotStudio para comprobar los demás mensajes del registro
de eventos y encontrar otros eventos que se hayan producido
al mismo tiempo!
Acciones recomendadas
Se ha solicitado al sistema que pase al modo automático.
Determine las causas del paro, con ayuda del registro de
Consecuencias
eventos. Solucione el fallo. Si es necesario, mueva el puntero
El sistema pasará al modo automático tras la confirmación en
de programa a main antes de presionar el botón de inicio.
el FlexPendant.
10021, Restablecimiento de error de ejecución
10017, Modo automático confirmado
Descripción
Descripción
La ejecución del programa de la tarea arg ha abandonado el
El sistema se encuentra en el modo automático.
estado de error espontáneo.
Consecuencias
El dispositivo de habilitación está desconectado. El robot puede
moverse sin intervención humana.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
101
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10024, Disparo de colisión
Consecuencias
El funcionamiento normal es posible.
Descripción
Algún elemento mecánico del manipulador ha colisionado con
un elemento de equipo fijo de la célula.
10031, Todos los ejes calibrados
Descripción
Consecuencias
El movimiento del manipulador se ha interrumpido y la
ejecución del programa se ha detenido.
El sistema ha comprobado que todos los ejes del manipulador
están calibrados.
Consecuencias
10025, Colisión confirmada
El funcionamiento normal es posible.
Descripción
La detección de colisión ha sido confirmada.
10032, Todos los cuentarrevoluciones
actualizados
Acciones recomendadas
Descripción
10026, Retracción de colisión
El sistema ha comprobado que todos cuentarrevoluciones de
los ejes del manipulador están actualizados.
Descripción
El manipulador ha intentado retroceder para alejarse del
obstáculo con el que ha colisionado, consiguiendo hacerlo con
éxito.
Consecuencias
El funcionamiento normal es posible.
10033, Todos los ejes sincronizados
Consecuencias
El sistema está preparado para reanudar el funcionamiento
Descripción
El sistema ha comprobado que todos los ejes del manipulador
normal.
están sincronizados.
10027, Fallo de retracción de colisión
Consecuencias
El funcionamiento normal es posible.
Descripción
El manipulador ha intentado retroceder para alejarse del
obstáculo con el que ha colisionado, pero no ha conseguido
10034, Eje no conmutado
Descripción
hacerlo con éxito.
El sistema ha comprobado que uno o varios ejes del
Consecuencias
El sistema NO está preparado para reanudar el funcionamiento
manipulador no están conmutados.
Consecuencias
normal.
Para permitir el funcionamiento, todos los ejes del manipulador
Causas probables
Esto puede deberse a que el robot se ha quedado pegado al
deben estar conmutados.
Causas probables
objeto con el que ha colisionado.
Es posible que el motor de accionamiento del manipulador y
Acciones recomendadas
Entre en el modo manual. Mueva manualmente el robot para
alejarlo del objeto. Para reanudar el funcionamiento, reinicie
las unidades relacionadas hayan sido alterados, por ejemplo
tras sustituir una unidad defectuosa.
Acciones recomendadas
el programa.
Conmute los ejes del manipulador de la forma detallada en el
10030, Todos los ejes conmutados
Manual del producto del manipulador.
Descripción
El sistema ha comprobado que todos los ejes del manipulador
están conmutados.
Continúa en la página siguiente
102
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10035, Eje no calibrado
Acciones recomendadas
Sincronice los ejes del manipulador de la forma detallada en
Descripción
El sistema ha comprobado que uno o varios ejes del
manipulador no están calibrados.
el Manual del producto del manipulador.
10038, Memoria del robot en buen estado
Consecuencias
Para permitir el funcionamiento, todos los ejes del manipulador
Descripción
Durante el inicio, el sistema ha detectado que todos los datos
deben estar calibrados.
de la memoria del robot se encuentran en buen estado.
Causas probables
Es posible que el motor de accionamiento del manipulador y
las unidades relacionadas hayan sido alterados, por ejemplo
Consecuencias
El funcionamiento es posible.
tras sustituir una unidad defectuosa.
10039, Memoria del robot en mal estado
Acciones recomendadas
Calibre los ejes del manipulador de la forma detallada en el
Descripción
Manual del producto del manipulador.
Durante el inicio, el sistema ha detectado que los datos de la
memoria del robot no se encuentran en buen estado.
10036, Cuentarrevoluciones no actualizado
Consecuencias
Todos los datos deben encontrarse en buen estado para
Descripción
El sistema ha comprobado que los cuentarrevoluciones de uno
o varios ejes del manipulador no están actualizados.
permitir el funcionamiento automático. Es posible mover
manualmente el robot.
Causas probables
Consecuencias
Para permitir el funcionamiento, los cuentarrevoluciones de
todos los ejes del manipulador deben estar actualizados.
Existen diferencias entre los datos almacenados en el robot y
en el controlador. Puede deberse a la sustitución de la tarjeta
de medida serie, del controlador o de ambos.
Causas probables
Es posible que el motor de accionamiento del manipulador y
las unidades relacionadas hayan sido alterados, por ejemplo
Acciones recomendadas
Actualice la memoria del robot de la forma detallada en el
Manual del operador del IRC5.
tras sustituir una unidad defectuosa.
Acciones recomendadas
Actualice los cuentarrevoluciones de todos los ejes del
10040, Programa cargado
manipulador de la forma detallada en el Manual del producto
Descripción
del manipulador.
Se ha cargado un programa o un módulo de programa en la
tarea arg. Después de la carga, quedan arg bytes de memoria.
El programa cargado tiene un tamaño de arg bytes.
10037, Eje no sincronizado
Descripción
El sistema ha comprobado que uno o varios ejes del
10041, Programa eliminado
Descripción
manipulador no están sincronizados.
Se ha eliminado un programa o un módulo de programa de la
Consecuencias
Para permitir el funcionamiento, todos los ejes del manipulador
tarea arg.
Consecuencias
deben estar sincronizados.
Si el programa eliminado contenía la rutina de entrada a la
Causas probables
Es posible que el motor de accionamiento del manipulador y
tarea, el programa dejará de ser ejecutable.
las unidades relacionadas hayan sido alterados, por ejemplo
Causas probables
tras sustituir una unidad defectuosa.
Es posible que sea necesario eliminar manualmente el
programa.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
103
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10052, Inicio de recuperación
Acciones recomendadas
Defina una rutina de entrada en uno de los demás programas
de la tarea, o bien: Cargue un programa que contenga una
rutina de entrada.
Descripción
El movimiento de recuperación se ha iniciado.
Acciones recomendadas
10042, Eje sincronizado
10053, Recuperación ejecutada
Descripción
Se realizó una calibración fina o una actualización de los
Descripción
cuentarrevoluciones.
El movimiento de recuperación se ha ejecutado en su totalidad.
Acciones recomendadas
10043, Fallo de reinicio
10054, Recuperación rechazada
Descripción
La tarea arg no puede reiniciarse.
Descripción
La recuperación sobre la ruta no es posible dado que un cliente
10044, Puntero de programa actualizado
ya la ha solicitado.
Descripción
Acciones recomendadas
Es posible que la tarea arg haya cambiado la posición del
Se ha solicitado un nuevo movimiento de recuperación durante
puntero de programa.
un movimiento de recuperación ya iniciado. Reduzca el número
de solicitudes de inicio de las E/S del sistema.
Acciones recomendadas
10055, Proceso de trayectoria reiniciado
10045, Sistema reiniciado
Descripción
Descripción
El proceso de trayectoria se ha reiniciado.
El sistema fue reiniciado.
Acciones recomendadas
Acciones recomendadas
10056, Se ha iniciado el apagado del sistema
10046, Reset del sistema
Descripción
Descripción
Cargando los parámetros de instalación originales del sistema.
Ya se ha iniciado el apagado del sistema y se están deteniendo
las actividades y almacenando el estado actual para usarlo en
10048, Tarea de segundo plano detenida
el siguiente inicio.
Acciones recomendadas
Descripción
La tarea arg se ha detenido sin motivo aparente.
10060, Prueba de cadena de habilitación
Acciones recomendadas
Descripción
10051, Error en la rutina de eventos
Descripción
La cadena de habilitación se comprueba siempre durante el
inicio. Si la prueba falla, aparece un mensaje de error referido
a la habilitación.
La tarea arg no pudo iniciar la rutina de eventos de sistema
especificada arg. La rutina es desconocida en el sistema o el
programa no puede vincularse.
Acciones recomendadas
Si la prueba de habilitación falla en el momento del inicio, el
mensaje de error relacionado será "Tiempo límite de cadena
Acciones recomendadas
de habilitación".
Inserte la rutina en un módulo de sistema o: Corrija el programa
o: Asegúrese de que otra persona no tenga el control maestro
del movimiento.
Continúa en la página siguiente
104
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10061, Se ha modificado un objetivo.
en el programa y corríjalos. Consulte los mensajes de error
anteriores del registro de eventos.
Descripción
Un objetivo del módulo arg de la tarea arg ha sido modificado
o ajustado.
Línea inicial arg, columna arg, línea final arg.
10068, Iniciar programa
Descripción
Imposible iniciar el programa para la tarea arg.
10062, Se ha editado un módulo.
Consecuencias
Descripción
El programa no se ejecutará.
El módulo arg de la tarea arg ha sido editado entre las líneas:
10074, Servidor de NFS activo
arg, arg, por arg.
Descripción
10063, Módulo editado
El sistema de control se comunica correctamente con el
Descripción
servidor de NFS arg.
El módulo arg de la tarea arg ha sido editado.
10075, Servidor de NFS inactivo
10064, Se ha borrado un módulo.
Descripción
Descripción
El sistema de control no puede comunicarse correctamente
El módulo arg de la tarea arg ha sido borrado.
con el servidor de NFS arg.
Consecuencias
10065, Un nuevo usuario ha empezado a
modificar el código de RAPID.
Si el servidor arg está configurado como TRUSTED (De
confianza), la ejecución del programa se detendrá. Si el servidor
está configurado como NON-TRUSTED (No de confianza), la
Descripción
El usuario arg ha empezado a hacer cambios en los programas
ejecución continuará. Estas definiciones se especifican en el
Manual de aplicaciones: Comunicación con el robot y control
de RAPID de la tarea arg.
de E/S.
10066, Imposible cargar un módulo de sistema
Causas probables
Si este mensaje aparece al iniciar el sistema por primera vez,
Descripción
es posible que la configuración del servidor sea incorrecta. Si
El módulo de sistema arg de la tarea arg no puede ser cargado
dado que no se encuentra el archivo.
10067, Restablecimiento de puntero de programa
aparece durante el funcionamiento, la comunicación que
funcionaba anteriormente se ha perdido debido a la interrupción
de la conexión. ¡Consulte también el registro de eventos de
E/S!
Descripción
Acciones recomendadas
Imposible restablecer el puntero de programa para la tarea arg.
Compruebe la configuración del servidor de NFS. Compruebe
Consecuencias
todo el hardware de comunicación, los cables, etc. Compruebe
El programa no se iniciará.
la configuración del cliente de NFS en el controlador.
Causas probables
No hay ningún programa cargado. Falta la rutina Main. Hay
10076, Servidor de FTP activo
errores en el programa.
Descripción
Acciones recomendadas
El sistema de control se comunica correctamente con el
Cargue el programa si no hay ningún programa cargado.
servidor de FTP arg.
Compruebe que el programa tenga una rutina Main. Si no hay
ninguna rutina Main, añada una. Busque los posibles errores
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
105
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10077, Servidor de FTP inactivo
10081, Tarea en segundo plano arg
Descripción
Descripción
El sistema de control no puede comunicarse correctamente
Imposible cargar una nueva versión de un módulo. El origen
con el servidor de FTP arg.
del módulo es arg.
Consecuencias
Acciones recomendadas
Si el servidor arg está configurado como TRUSTED (De
Consulte los mensajes anteriores para determinar las posibles
confianza), la ejecución del programa se detendrá. Si el servidor
causas originales o reinicie el sistema con un "Restablecer
está configurado como NON-TRUSTED (No de confianza), la
RAPID" para cargar la versión más reciente.
ejecución continuará. Estas definiciones se especifican en el
Manual de aplicaciones: Comunicación con el robot y control
de E/S.
10082, Supervisión de tareas de RAPID
Descripción
Causas probables
La tarea arg no está en funcionamiento. El sistema cambiará
Si este mensaje aparece al iniciar el sistema por primera vez,
al estado SysFail. Ahora es imposible cambiar a Motores ON
es posible que la configuración del servidor sea incorrecta. Si
arg.
aparece durante el funcionamiento, la comunicación que
funcionaba anteriormente se ha perdido debido a la interrupción
de la conexión. ¡Consulte también el registro de eventos de
E/S!
Acciones recomendadas
Acciones recomendadas
Consulte los mensajes anteriores para determinar las causas.
Reinicie el sistema para restablecer el estado de error.
10083, Supervisión de tareas de RAPID
Compruebe la configuración del servidor de FTP. Compruebe
todo el hardware de comunicación, los cables, etc. Compruebe
la configuración del cliente de FTP en el controlador.
Descripción
La tarea arg no está en funcionamiento. El sistema cambiará
al estado Motores OFF. arg
10078, Se ha editado un módulo
Acciones recomendadas
Consulte los mensajes anteriores para determinar las causas.
Descripción
El módulo arg de la tarea arg ha sido editado antes de la línea:
arg, por arg.
10084, Supervisión de tareas de RAPID
Descripción
10079, Se ha editado un módulo
La tarea arg no está en funcionamiento. Todas las tareas de
tipo NORMAL se detendrán también.
Descripción
El módulo arg de la tarea arg ha sido editado después de la
Acciones recomendadas
línea: arg, por arg.
Consulte los mensajes anteriores para determinar las causas.
10080, Se ha encontrado un archivo de RAPID
actualizado
10085, Supervisión de tareas de RAPID
Descripción
No es posible detener la tarea arg. El nivel trustLevel cambiará
La tarea SEMISTATIC arg tiene instalada una versión de un
a un nivel de seguridad.
módulo anterior a la instalada en el archivo de origen arg
Acciones recomendadas
Acciones recomendadas
Si desea poder detener la tarea, cambie el nivel trustLevel o el
Reinicie el sistema con un "Restablecer RAPID" para instalar
tipo de tarea en el menú de parámetros del sistema.
Descripción
la versión más reciente.
Continúa en la página siguiente
106
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10086, Robot purgado correctamente
Acciones recomendadas
La tarea de segundo plano está configurada con el nivel
Descripción
La presión de purga se ha recuperado después de un fallo de
purga.
trustLevel cambiado a SysHalt.
10095, Al menos una tarea no seleccionada en
panel de selección de tareas
Acciones recomendadas
Descripción
10087, Estado de purga: arg.
Hay una o varias tareas de tipo NORMAL sin seleccionar en el
Descripción
panel de selección de tareas al realizar un (re)inicio.
Estado cambiado.
Acciones recomendadas
Acciones recomendadas
10096, ¡arg inactivo!
10090, Reset de RAPID realizado
Descripción
Descripción
El objeto de trabajo arg contiene una unidad mecánica
El reset de RAPID se ha realizado.
coordinada que no está activada.
Consecuencias
Acciones recomendadas
Tras el reinicio, el estado del sistema se reanuda, excepto los
Active la unidad mecánica y realice de nuevo la operación.
programas y módulos cargados manualmente. Las tareas
estáticas y semiestáticas se reinician desde el principio, no
10097, Imposible reiniciar
desde el estado que tenían al detener el sistema.
Los módulos se instalan y cargan de acuerdo con la
configuración establecida. Los parámetros de sistema no se
Descripción
La tarea arg se encuentra en el estado bloqueado y por ello no
es posible reiniciar el programa desde la posición actual.
ven afectados.
Acciones recomendadas
Causas probables
El reset de RAPID fue ordenado por el usuario. El sistema forzó
Debe mover el puntero de programa antes del reinicio.
el reset de RAPID debido a datos inconsistentes, problemas
de funcionamiento o estados de tarea no recuperables.
10098, Imposible reiniciar
Descripción
10091, Imposible reiniciar
La tarea arg se ha encontrado en el estado de fallo de sistema
y por ello no es posible reiniciar el programa desde la posición
Descripción
No es posible reiniciar después de una detección de colisión
sin antes confirmar la ventana de diálogo de error.
actual.
Acciones recomendadas
Debe mover el puntero de programa antes del reinicio.
Acciones recomendadas
10099, Inicio de programa rechazado
10092, Imposible (re)iniciar
Descripción
Descripción
No es posible (re)iniciar a causa de la pérdida del contacto con
el módulo de E/S arg configurado con el nivel trustLevel.
El sistema ha realizado un paro suave y el programa no puede
reiniciarse.
Consecuencias
Acciones recomendadas
El sistema pasa al estado Motores OFF y no puede iniciarse.
El significado completo de este estado se describe en el Manual
10093, Imposible (einiciar
de resolución de problemas del IRC5.
Descripción
El reinicio de la tareaarg no es posible antes de realizar un
reinicio del controlador.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
107
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
Causas probables
Acciones recomendadas
Es posible que el paro suave se deba a la apertura del circuito
de seguridad.
10112, Notificación del calendario SIS
Acciones recomendadas
Descripción
Compruebe los circuitos de seguridad para detectar si algún
Se ha modificado la fecha y la hora del sistema.
interruptor está abierto. Pase al modo Motores ON y reinicie el
Esto puede ocasionar problemas con la notificación del
programa.
calendario SIS.
Acciones recomendadas
10106, Tiempo de servicio
Es posible que deba cambiar el valor de los parámetros de SIS
Descripción
Calender Limit (Límite de calendario) y Calender Warning
Ha llegado el momento de realizar el servicio técnico del robot
(Advertencia de calendario)
arg porque han transcurrido arg días desde el último servicio
10115, Los datos serie de memoria trasladados
de la memoria del robot a la del controlador
técnico.
Acciones recomendadas
Descripción
10107, Cerca del servicio
Los datos serie de memoria han sido trasladados de la memoria
del robot a la del controlador por arg.
Descripción
Quedan arg días para el servicio técnico del robot arg.
Acciones recomendadas
Acciones recomendadas
10116, Los datos serie de memoria trasladados
de la memoria del controlador a la del robot
10108, Tiempo de servicio
Descripción
Descripción
Ha llegado el momento de realizar el servicio técnico del robot
arg porque se han alcanzado las arg horas de producción desde
el último servicio técnico.
Los datos serie de memoria han sido trasladados de la memoria
del controlador a la del robot por arg.
Acciones recomendadas
Acciones recomendadas
10117, Los datos serie de memoria se han
borrado de la memoria del robot
10109, Cerca del servicio
Descripción
Descripción
Quedan arg horas de producción hasta el siguiente servicio
Los datos serie de memoria han sido borrados de la memoria
del robot por arg.
técnico del robot arg.
Acciones recomendadas
Acciones recomendadas
10110, La caja reductora necesita servicio técnico
10118, Los datos serie de memoria se han
borrado de la memoria del controlador
Descripción
La caja reductora de arg del robot arg requiere servicio técnico.
Descripción
Los datos serie de memoria han sido borrados de la memoria
Acciones recomendadas
del controlador por arg.
10111, La caja reductora ha alcanzado el intervalo
de servicio
Acciones recomendadas
Descripción
La caja reductora de arg del robot arg ha alcanzado el arg %
de su intervalo de servicio.
Continúa en la página siguiente
108
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10120, Programa detenido
10127, La ejecución hacia atrás no es posible
Descripción
Descripción
La tarea arg se ha detenido. Se debe a que se ha producido un
La tarea arg se ha detenido. El motivo es que no es posible
paro externo o interno después de la instrucción actual.
ejecutar hacia atrás más allá del comienzo de la lista de
instrucciones.
Acciones recomendadas
Acciones recomendadas
10121, Programa detenido
10128, La ejecución hacia atrás no es posible
Descripción
La tarea arg se ha detenido. El motivo es que la tarea ha llegado
Descripción
a una instrucción Exit.
La tarea arg se ha detenido. El motivo es que no es posible
ejecutar hacia atrás más allá de la instrucción.
Acciones recomendadas
Acciones recomendadas
10122, Programa detenido
10129, Programa detenido
Descripción
La tarea arg se ha detenido. Se debe a que la tarea se ha
Descripción
ejecutado en su totalidad.
La tarea arg se ha detenido. Se debe a que la rutina de evento
de RESET o POWER_ON se ha ejecutado en su totalidad.
Acciones recomendadas
Acciones recomendadas
10123, Programa detenido
10130, Programa detenido
Descripción
La tarea arg se ha detenido. Se debe a que este paso de la
Descripción
tarea se ha ejecutado en su totalidad.
La tarea arg se ha detenido. Se debe a que este paso de
movimiento de la tarea se ha ejecutado en su totalidad.
Acciones recomendadas
Acciones recomendadas
10124, Programa detenido
10131, Programa detenido
Descripción
La tarea arg se ha detenido. Se debe a que la tarea ha llegado
Descripción
a una instrucción Break.
La tarea arg se ha detenido. Se debe a que la rutina a la que
se ha llamado desde la interrupción de E/S de sistema o una
Acciones recomendadas
rutina de servicio se ha ejecutado en su totalidad.
10125, Programa detenido
Acciones recomendadas
Descripción
La tarea arg se ha detenido. Se debe a que se ha producido un
paro externo o interno.
10132, Programa detenido
Descripción
La tarea arg se ha detenido. No fue posible determinar las
Acciones recomendadas
causas.
10126, Programa detenido
Acciones recomendadas
Descripción
La tarea arg se ha detenido. Se debe a que se ha producido un
error.
Acciones recomendadas
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
109
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10133, Programa detenido
10138, Programa detenido
Descripción
Descripción
La tarea arg se ha detenido. Se debe a que la tarea se ha
La tarea arg se ha detenido. Se debe a que se ha producido
ejecutado en su totalidad con la ejecución de los gestores
una parada desde una entrada del sistema.
UNDO.
Acciones recomendadas
10134, Detenida la rutina de evento POWER_ON
Descripción
10140, Velocidad ajustada
Descripción
El sistema se detuvo durante la ejecución de una rutina de
La velocidad ha sido ajustada al arg % por arg.
evento POWER_ON.
Consecuencias
AVISO: Si se mueve el puntero de programa, el sistema se
quedará en un estado indefinido dado que muchas aplicaciones
dependen de la finalización de la rutina POWER_ON.
Causas probables
10141, Puntero de programa situado en la
posición del cursor
Descripción
El puntero de programa de la tarea arg del módulo arg ha sido
trasladado a la posición arg por arg.
Las rutinas de evento POWER_ON pueden detenerse por
muchos motivos. Es posible que tenga que buscar otros
10142, Llamada a rutina
mensajes en el registro de eventos, pero los más normales
son: Botón Stop (Parar) Instrucción de paro de RAPID Error de
Descripción
El puntero de programa de la tarea arg ha sido trasladado a la
ejecución
rutina arg por arg.
Acciones recomendadas
A menos que haya un error, las rutinas POWER_ON
completarán su tarea si pulsa iniciar y, una vez finalizada, la
10143, Cancelar llamada a rutina
ejecución se detendrá de nuevo sin ejecutar ningún código de
Descripción
RAPID normal.
La ejecución de la rutina llamada ha sido cancelada en la tarea
arg por arg.
10135, Programa detenido
10144, Simulacro de instrucción de espera
Descripción
La tarea arg se ha detenido. El motivo es que se ha producido
Descripción
una parada externa o interna después del ciclo actual.
Una instrucción de espera (WaitTime, WaitUntil, WaitDO, etc.)
ha sido simulada en la tarea arg por arg.
Acciones recomendadas
Acciones recomendadas
10136, Programa detenido
10145, Panel de selección de tareas configurado
Descripción
La tarea arg se ha detenido. El motivo es que la tarea ha llegado
Descripción
a una instrucción de parada.
La tarea arg ha sido añadida al panel de selección de tareas
por arg.
Acciones recomendadas
Acciones recomendadas
10137, Programa detenido
10146, Panel de selección de tareas borrado
Descripción
La tarea arg se ha detenido. El motivo es que la tarea ha llegado
Descripción
a una instrucción de parada\AllMoveTask.
La tarea arg ha sido eliminada del panel de selección de tareas
por arg.
Acciones recomendadas
Continúa en la página siguiente
110
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10154, Modo de ejecución modificado
Acciones recomendadas
10147, Configuración de la variable
Descripción
Descripción
El modo de ejecución ha sido cambiado a modo continuo por
arg.
La variable arg ha sido cambiada al valor arg por arg.
10155, Programa reiniciado
Acciones recomendadas
Descripción
10148, Configuración de E/S
La ejecución de la tarea arg se ha reanudado en el mismo punto
en el que se detuvo anteriormente. No fue posible determinar
Descripción
La señal de E/S arg ha sido cambiado al valor arg por arg.
el origen.
Acciones recomendadas
Acciones recomendadas
10149, Puntero de programa situado en rutina
10156, Programa reiniciado
Descripción
Descripción
El puntero de programa de la tarea arg ha sido trasladado a la
La ejecución de la tarea arg se ha reanudado en el mismo punto
en el que se detuvo anteriormente. El origen es un cliente
rutina arg por arg.
externo.
Acciones recomendadas
Acciones recomendadas
10150, Programa iniciado
10157, Programa reiniciado
Descripción
La ejecución de la tarea arg ha empezado por la primera
instrucción de la rutina de entrada de la tarea. No fue posible
Descripción
La ejecución de la tarea arg se ha reanudado en el mismo punto
en el que se detuvo anteriormente. La solicitud de reinicio fue
determinar el origen.
iniciada por una acción, lo que ha provocado la ejecución del
Acciones recomendadas
gestor UNDO.
10151, Programa iniciado
10158, Programa iniciado
Descripción
Descripción
La ejecución de la tarea arg ha empezado por la primera
instrucción de la rutina de entrada de la tarea. El origen es un
La ejecución paso a paso hacia delante de la tarea arg se ha
iniciado.
cliente externo.
Acciones recomendadas
10159, Programa iniciado
Descripción
10152, Programa iniciado
La ejecución paso a paso hacia atrás de la tarea arg se ha
Descripción
iniciado.
La ejecución de la tarea arg ha empezado por la primera
instrucción de la rutina de entrada de la tarea. La solicitud de
10160, Pulsación de E/S
inicio fue iniciada por una acción, lo que ha provocado la
Descripción
ejecución del gestor UNDO.
La señal de E/S arg ha sido sometida a pulsos por arg.
10153, Modo de ejecución modificado
Acciones recomendadas
Descripción
El modo de ejecución ha sido cambiado a un solo ciclo por arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
111
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10170, Tarea en segundo plano arg
Descripción
La tarea no se inicia correctamente. La tarea está vacía.
Acciones recomendadas
10176, Tarea en segundo plano arg
Descripción
Acciones recomendadas
La tarea no se inicia correctamente. Imposible cargar el módulo.
10171, Tarea en segundo plano arg
Causas probables
El módulo no se encuentra en el directorio de destino.
Descripción
La tarea no se inicia correctamente. Estado incorrecto.
Acciones recomendadas
Copie el archivo de módulo al directorio de destino. Restablezca
Acciones recomendadas
el sistema.
10172, Tarea en segundo plano arg
Descripción
La tarea no se inicia correctamente. Imposible cambiar el PP
a la rutina Main.
10177, La tarea rechaza iniciarse
Descripción
Tarea arg:
No hay suficiente memoria de programas o la memoria de
Causas probables
programas está fragmentada. Es posible que falten módulos o
El módulo que contiene la rutina Main no se ha cargado porque
que haya datos que no han sido instalados.
el archivo del módulo no se encuentra en el directorio de
destino.
El módulo que contiene la rutina Main no se ha cargado porque
el archivo de configuración no contiene ninguna entrada para
la carga del módulo.
Falta la rutina Main.
Acciones recomendadas
Descargue/recargue los módulos y reinicie el sistema. Divida
las estructuras de datos de gran tamaño. Ejecute Restablecer
RAPID. Aumente el tamaño de pila de la tarea.
10178, Las tareas de tipo static/semistatic no
pueden ejecutarse paso a paso
La entrada a Main está dañada.
Acciones recomendadas
Cargue manualmente el módulo o realice un restablecimiento
del sistema tras eliminar la causa del problema.
Descripción
No es posible iniciar la tarea arg.
Las tareas de tipo static/semistatic sólo pueden ejecutarse en
10173, Tarea en segundo plano arg
el modo continuo.
Consecuencias
Descripción
La tarea no se inicia correctamente. Imposible cambiar el modo
No se iniciará ninguna tarea.
Causas probables
de ejecución.
Se está intentando ejecutar paso a paso (hacia delante o hacia
Acciones recomendadas
atrás) una tarea de tipo static/semistatic.
10174, Tarea en segundo plano arg
Acciones recomendadas
Inicie arg en el modo continuo.
Descripción
La tarea no se inicia correctamente. La solicitud de inicio ha
10185, No se pudo preparar la tarea para el inicio
fallado.
Descripción
Acciones recomendadas
Tarea arg:
10175, Tarea en segundo plano arg
No hay suficiente memoria de programas o la memoria de
programas está fragmentada. Es posible que falten módulos o
que haya datos que no han sido instalados.
Descripción
La tarea no se inicia debido a un error de sintaxis.
Continúa en la página siguiente
112
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10195, Área protegida no realizada
Acciones recomendadas
Descargue/recargue los módulos y reinicie el sistema. Divida
las estructuras de datos de gran tamaño. Ejecute Restablecer
RAPID.
Descripción
Se ha producido una caída de alimentación en medio de un
área protegida de la tarea arg. Todas las tareas se restablecerán
10190, Área protegida no realizada
y todos los programas de usuario se perderán.
Acciones recomendadas
Descripción
Pruebe a guardar el programa de usuario y reinicie el sistema.
Se ha producido una caída de alimentación en medio de un
área protegida de la tarea arg. El sistema está intentando
10196, Área protegida no realizada
recuperarse automáticamente.
Descripción
Acciones recomendadas
Se ha producido una caída de alimentación en medio de un
10191, Área protegida no realizada
área protegida de la tarea arg.
Acciones recomendadas
Descripción
Se ha producido una caída de alimentación en medio de un
10200, Registros de eventos borrados
área protegida de la tarea arg. Se ha eliminado un error
Descripción
pendiente de la cola.
El usuario arg ha borrado todos los registros de eventos.
Acciones recomendadas
Acciones recomendadas
10192, Área protegida no realizada
10201, Se han borrado los registros de eventos
para un dominio
Descripción
Se ha producido una caída de alimentación en medio de un
área protegida de la tarea arg. Se ha eliminado una salida
Descripción
pendiente de la cola.
El usuario arg ha borrado el dominio argX XXX.
Acciones recomendadas
Acciones recomendadas
10193, Área protegida no realizada
10202, Fecha u hora modificadas
Descripción
Descripción
Se ha producido una caída de alimentación en medio de un
Fecha u hora cambiadas a arg por arg.
área protegida de la tarea arg. Puede dar lugar a un ciclo de
Acciones recomendadas
programa adicional.
10205, Parámetro de configuración modificado
Acciones recomendadas
Descripción
10194, Área protegida no realizada
Un parámetro de configuración ha sido cambiado en el dominio:
Descripción
arg por arg.
Se ha producido una caída de alimentación en medio de un
Acciones recomendadas
área protegida de la tarea arg. La tarea se reinicia desde la
rutina Main.
10206, Archivo de configuración cargado
Acciones recomendadas
Descripción
Un archivo de configuración arg ha sido cargado por arg.
Acciones recomendadas
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
113
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10210, Ejecución cancelada
10217, Ejecución cancelada
Descripción
Descripción
El reinicio eliminará la ejecución de la tarea arg de una rutina
El reinicio eliminará la ejecución de la tarea arg de una rutina
de evento de sistema POWER ON.
USER.
Acciones recomendadas
Acciones recomendadas
10211, Ejecución cancelada
10218, Ejecución cancelada
Descripción
Descripción
El reinicio eliminará la ejecución de la tarea arg de una rutina
El reinicio eliminará la ejecución de la tarea arg.
de evento de sistema STOP.
Acciones recomendadas
Acciones recomendadas
10219, Ejecución cancelada
10212, Ejecución cancelada
Descripción
Descripción
El reinicio eliminará la ejecución de la tarea arg de una rutina
El reinicio eliminará la ejecución de la tarea arg de una rutina
de evento de sistema STEP.
de evento de sistema EMERGENCY STOP.
Acciones recomendadas
Acciones recomendadas
10230, Paso de copia de seguridad ejecutado
10213, Ejecución cancelada
Descripción
Descripción
El paso de copia de seguridad 'Prepare' se ha ejecutado en su
El reinicio eliminará la ejecución de la tarea arg de una rutina
totalidad.
de evento de sistema START.
Acciones recomendadas
Acciones recomendadas
10231, Paso de copia de seguridad ejecutado
10214, Ejecución cancelada
Descripción
Descripción
El paso de copia de seguridad 'Configuration' se ha ejecutado
El reinicio eliminará la ejecución de la tarea arg de una rutina
en su totalidad.
de evento de sistema RESTART.
Acciones recomendadas
Acciones recomendadas
10232, Paso de copia de seguridad ejecutado
10215, Ejecución cancelada
Descripción
Descripción
La copia de seguridad de la tarea se ha ejecutado en su
El reinicio eliminará la ejecución de la tarea arg de una rutina
totalidad.
de evento de sistema RESET.
Acciones recomendadas
Acciones recomendadas
10233, Paso de copia de seguridad ejecutado
10216, Ejecución cancelada
Descripción
Descripción
La copia de seguridad de la configuración del controlador se
El reinicio eliminará la ejecución de la tarea arg de una rutina
ha ejecutado en su totalidad.
de evento de sistema INTERNAL.
Acciones recomendadas
Acciones recomendadas
Continúa en la página siguiente
114
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10250, Paso de restauración ejecutado
Descripción
10261, Información del sistema de diagnóstico
no disponible
El paso de restauración 'Prepare' se ha ejecutado en su
Descripción
totalidad.
El usuario solicitó guardar información del sistema de
diagnóstico en el archivo arg. El sistema no ha podido satisfacer
Acciones recomendadas
esta petición.
10251, Paso de restauración ejecutado
Consecuencias
La información del sistema de diagnóstico se utiliza
Descripción
El paso de restauración 'Configuration' se ha ejecutado en su
totalidad.
normalmente al informar a la asistencia de ABB de un problema
con el sistema.
Causas probables
Acciones recomendadas
El sistema se encuentra en un estado que impide generar la
10252, Paso de restauración ejecutado
Descripción
información solicitada.
Compruebe que el dispositivo disponga de suficiente espacio
libre.
La restauración de 'Task' se ha ejecutado en su totalidad.
Acciones recomendadas
Acciones recomendadas
Si experimenta cualquier problema con el sistema, póngase
en contacto con la asistencia de ABB.
10253, Paso de restauración ejecutado
10262, Registro de sistema creado
Descripción
La restauración de 'User Task' se ha ejecutado en su totalidad.
Descripción
Se ha creado un registro de sistema.
Acciones recomendadas
Es necesario crear un diagnóstico de sistema utilizando el
10254, Paso de restauración ejecutado
FlexPendant o RobotStudio.
Causas probables
Descripción
La restauración de la configuración del controlador se ha
El registro de sistema se disparó por el evento de error: arg
Acciones recomendadas
ejecutado en su totalidad.
Cree un diagnóstico de sistema y conéctelo a su informe de
Acciones recomendadas
error si se informa al Servicio Técnico de ABB.
10255, Paso de restauración listo
Descripción
La restauración de 'Safety Settings' está lista.
10270, Función Cyclic Brake Check realizada
Descripción
La función Cyclic Brake Check ha sido realizada con todos los
Acciones recomendadas
frenos supervisados por los controladores de seguridad.
10260, Generada información del sistema de
diagnóstico
10271, Cyclic Brake Check iniciado
Descripción
Descripción
Se ha iniciado Cyclic Brake Check.
La información del sistema de diagnóstico se generó
correctamente en el archivo arg
10272, Función Brake Check realizada
Descripción
La función Brake Check ha sido realizada con todos los frenos.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
115
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10273, Función Brake Check iniciada
Descripción
Se ha iniciado Brake Check.
10284, Modo de ejecución sin movimientos
configurado
Descripción
El modo de ejecución sin movimientos ha sido configurado por
10274, Mantenimiento de frenos
arg.
Descripción
Consecuencias
arg indica que el freno mecánico del eje arg de la unidad
La unidad mecánica no se moverá durante la ejecución.
mecánica arg necesita mantenimiento de frenos.
Consecuencias
El mantenimiento de frenos se inicia automáticamente en el
eje arg. El freno se probará de nuevo a continuación.
10285, Modo de ejecución sin movimientos
restablecido
Descripción
El modo de ejecución sin movimientos ha sido restablecido por
10275, Rendimiento de los frenos
arg.
Descripción
Consecuencias
arg indica que el freno mecánico del eje arg de la unidad
La unidad mecánica se moverá durante la ejecución.
mecánica arg funciona perfectamente.
10286, Carga útil modificada
10280, Sistema de coordenadas cambiado a base
de coordenadas mundo
Descripción
La carga útil ha sido cambiada a arg en la tarea arg por arg.
Descripción
El sistema de coordenadas ha sido cambiado a base de
coordenadas mundo en la unidad mecánica arg por arg.
10287, Carga total modificada
Descripción
La carga total ha sido cambiada a arg en la tarea arg por arg.
10281, Sistema de coordenadas cambiado a base
de coordenadas de la base
Descripción
10288, Objeto de trabajo modificado
Descripción
El sistema de coordenadas ha sido cambiado a base de
coordenadas de la base en la unidad mecánica arg por arg.
10282, Sistema de coordenadas cambiado a base
de coordenadas de la herramienta
El objeto de trabajo ha sido cambiado a arg en la tarea arg por
arg.
10289, Herramienta modificada
Descripción
Descripción
La herramienta ha sido cambiada a arg en la tarea arg por arg.
El sistema de coordenadas ha sido cambiado a base de
coordenadas de la herramienta en la unidad mecánica arg por
10290, Robot calibrado
arg.
Descripción
10283, Sistema de coordenadas cambiado a base
de coordenadas del objeto
La unidad mecánica arg, del eje arg, ha sido calibrada por arg.
10291, Goto position
Descripción
El sistema de coordenadas ha sido cambiado a base de
Descripción
coordenadas del objeto en la unidad mecánica arg por arg.
La funcionalidad 'Goto position' ha sido utilizada por arg.
Continúa en la página siguiente
116
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10292, Cuentarrevoluciones actualizado
10301, Reset de RAPID ordenado
Descripción
Descripción
El cuentarrevoluciones del robot arg, del eje arg, ha sido
El reset del RAPID ha sido solicitado manualmente o
actualizado por arg.
automáticamente durante una configuración.
10293, Supervisión de trayectoria en On
10304, Actualización solicitada
Descripción
Descripción
La supervisión de trayectoria para la tarea arg ha sido cambiada
Se ha realizado una actualización de la configuración del
a On por el usuario: arg.
programa.
Acciones recomendadas
10294, Supervisión de trayectoria en Off
10350, Fallo de actualización de tarea
Descripción
La supervisión de trayectoria para la tarea arg ha sido cambiada
a Off por el usuario: arg.
Descripción
El sistema no pudo actualizar la tarea arg a la nueva
configuración.
10295, Sensibilidad de supervisión de trayectoria
actualizada
Acciones recomendadas
Descripción
10351, Tarea eliminada
La sensibilidad de la tarea arg para supervisión de trayectoria
ha sido ajustada al arg % por el usuario: arg.
Descripción
La tarea arg fue eliminada a causa de cambios en la
10296, Supervisión de movimiento en On
configuración.
Acciones recomendadas
Descripción
La supervisión movimiento para la tarea arg ha sido cambiada
a On por el usuario: arg.
10352, Tarea añadida
Descripción
10297, Supervisión de movimiento en Off
La tarea arg fue instalada a causa de cambios en la
configuración.
Descripción
La supervisión de Supervisión de movimiento para la tarea arg
Acciones recomendadas
ha sido cambiada a Off por el usuario: arg.
10353, Tarea reinstalada
10298, Sensibilidad de supervisión de
movimiento actualizada
Descripción
Descripción
configuración.
La sensibilidad de la tarea arg para supervisión de movimiento
Acciones recomendadas
La tarea arg fue reinstalada a causa de cambios en la
ha sido ajustada al arg % por el usuario: arg.
10300, Se ha ordenado un reset del RAPID
10354, Restauración anulada por la pérdida de
datos del sistema.
Descripción
Descripción
El reset del RAPID ha sido solicitado por el sistema.
El sistema está utilizando una copia de seguridad de los datos
del sistema, dado que los datos del sistema no se guardaron
correctamente al apagar el sistema por última vez. Por ello, se
volvió a intentar una restauración solicitada anteriormente
desde el directorio arg, pero el intento fue anulado.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
117
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
Consecuencias
Acciones recomendadas
No se cargará ningún programa o módulo de RAPID.
Compruebe el puntero de programa y cámbielo de posición en
caso necesario.
Causas probables
Los datos del sistema no se guardaron correctamente al apagar
Reduzca la velocidad.
el sistema por última vez.
10421, Trayectoria planificada no anulada
Acciones recomendadas
Después de la recuperación de la pérdida de datos del sistema
Descripción
a causa de una copia de seguridad o restauración o por la
Un objetivo que puede formar parte de la trayectoria planificada
reinstalación del sistema, compruebe que el directorio de copia
del robot ha sido modificado. La nueva posición del objetivo
de seguridad arg se encuentre en buen estado y realice de
se usará la próxima vez que se ejecute la instrucción con el
nuevo la restauración.
objetivo.
Consecuencias
10355, Error de restauración
La trayectoria planificada actual está usando la anterior posición
de objetivo.
Descripción
Error durante la restauración de la tarea. Se intenta cargar una
Acciones recomendadas
tarea desconocida, arg.
Si la trayectoria planificada actual es insegura, mueva el puntero
de programa para anularla.
Consecuencias
La carga ha sido anulada para arg.
Causas probables
El sistema actual no contiene las mismas opciones que el
utilizado para crear la copia de seguridad.
10450, Paquete de actualización rechazado por
el controlador
Descripción
No resultó posible preparar la actualización del sistema
10400, El usuario arg ha iniciado una sesión
RobotWare actual mediante el uso del paquete de actualización
con ID: arg. El código de error es: arg.
Descripción
El usuario arg ha iniciado una sesión con arg.
Consecuencias
El sistema permanece sin cambios.
10401, El usuario arg ha cerrado la sesión
Acciones recomendadas
Póngase en contacto con el proveedor del paquete o con la
Descripción
El usuario arg con arg ha cerrado la sesión.
10420, Nueva trayectoria de robot insegura
Descripción
La trayectoria del robot ha quedado libre después de la
modificación de un objetivo en la tarea arg. Por ese motivo, el
robot avanzará hacia la posición indicada en la instrucción de
movimiento del puntero de programa. Las instrucciones de
asistencia de ABB.
10451, Fallo en la actualización del sistema
RobotWare
Descripción
No resultó posible aplicar la actualización del sistema
RobotWare actual mediante el uso del paquete de actualización
con ID: arg. El código de error es: arg.
movimiento que se encuentren entre el objetivo modificado y
Consecuencias
el puntero de programa se omitirán.
El sistema permanece sin cambios.
Consecuencias
Acciones recomendadas
En este movimiento se utiliza la velocidad programada.
Póngase en contacto con el proveedor del paquete de
La nueva trayectoria no verificada puede contener obstáculos
desarrollo o con la asistencia de ABB.
que pueden dar lugar a una colisión.
Continúa en la página siguiente
118
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
10452, Actualización del sistema de RobotWare
finalizada
Descripción
La actualización del sistema de RobotWare con el paquete de
implementación 'arg' se ha completado correctamente.
a instalar el sistema de RobotWare actual. Utilice la
funcionalidad de recuperación de disco.
10456, Espacio en disco insuficiente para realizar
la petición
Encontrará un archivo con el resumen de la actualización en
Descripción
la siguiente ubicación: arg.
El espacio en disco disponible del controlador es insuficiente
La copia de seguridad del sistema anterior a la actualización
para realizar la acción solicitada. Se requiere un espacio de:
se ubica en: arg.
arg MB. Espacio disponible: arg MB.
Código de estado para la restauración automática de la copia
de seguridad: arg (0=pendiente/1=fallo/2=no solicitado).
Consecuencias
La acción solicitada se ha cancelado y el sistema permanece
sin cambios.
Consecuencias
El sistema actual se ha actualizado de acuerdo con el paquete
de actualización.
Acciones recomendadas
Elimine los archivos innecesarios del disco del controlador e
inténtelo de nuevo.
10453, Paquete de actualización eliminado
10457, Las rutinas de evento se han aplazado
Descripción
El paquete de actualización con el siguiente ID: arg ha sido
eliminado del controlador.
Descripción
No se ha podido iniciar la rutina de evento arg arg en la tarea
Consecuencias
arg. Las ejecuciones de las rutinas de evento se han aplazado
El paquete de actualización ya no está disponible. Se ha
hasta la siguiente orden de esta tarea.
recuperado el espacio en disco utilizado por el paquete.
Acciones recomendadas
Compruebe los eventos anteriores del registro de eventos que
10454, Paquete de actualización incompleto
eliminado
explican el motivo por el que no se ha podido iniciar esta tarea.
Descripción
11020, Error de copia de seguridad
El paquete de actualización incompleto con el siguiente ID: arg
ha sido eliminado del controlador.
Descripción
Se ha producido un error durante la preparación para crear una
Consecuencias
copia de seguridad.
Se ha recuperado el espacio en disco utilizado por la
Error desconocido.
actualización.
Consecuencias
La petición de copia de seguridad se ha cancelado.
10455, Error de actualización del sistema de
RobotWare
No se creó ninguna copia de seguridad.
Descripción
arg
Acciones recomendadas
La actualización del sistema de RobotWare no se completó
correctamente.
11024, Error de copia de seguridad
Consecuencias
Descripción
Es posible que el sistema de RobotWare actual se encuentre
en un estado no definido y necesite reparación.
Se ha producido un error durante la preparación para crear una
copia de seguridad.
No se pudo crear un directorio/archivo.
Acciones recomendadas
Compruebe manualmente si todos los productos del sistema
actual presentan las versiones esperadas y, a continuación,
cargue una copia de seguridad si así lo desea. Elimine y vuelva
Consecuencias
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
119
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
Causas probables
Acciones recomendadas
Es posible que no tenga acceso de escritura a la unidad de
Verifique que la unidad de destino de la copia de seguridad no
destino de la copia de seguridad.
esté protegida contra escritura Si se trata de una unidad de
Es posible que la unidad esté llena.
red, verifique que el controlador no haya perdido el contacto
Si se trata de una unidad de red, es posible que haya perdido
la conexión.
11029, Error de copia de seguridad
Acciones recomendadas
Descripción
Verifique que la unidad de destino de la copia de seguridad no
Se ha producido un error durante la preparación para crear una
esté protegida contra escritura Si se trata de una unidad de
copia de seguridad.
red, verifique que el controlador no haya perdido el contacto
La ruta de copia de seguridad indicada es demasiado larga.
11025, Error de copia de seguridad
Descripción
Consecuencias
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
Se ha producido un error durante la preparación para crear una
copia de seguridad.
Causas probables
La ruta de copia de seguridad indicada ha rebasado el número
No se pudo crear el directorio de copia de seguridad.
Consecuencias
máximo de caracteres permitido, que es de arg.
Acciones recomendadas
La petición de copia de seguridad se ha cancelado.
Utilice una ruta más corta para crear la copia de seguridad.
No se creó ninguna copia de seguridad.
11031, Error de copia de seguridad
Causas probables
Es posible que la ruta sea demasiado larga.
Es posible que no tenga acceso de escritura a la unidad de
destino de la copia de seguridad.
Descripción
Se ha producido un error durante la preparación para crear una
copia de seguridad.
Es posible que la unidad esté llena.
Si se trata de una unidad de red, es posible que haya perdido
Error al buscar un archivo/entrada.
Consecuencias
la conexión.
La petición de copia de seguridad se ha cancelado.
Acciones recomendadas
Verifique que la unidad de destino de la copia de seguridad no
No se creó ninguna copia de seguridad.
esté protegida contra escritura Si se trata de una unidad de
Acciones recomendadas
red, verifique que el controlador no haya perdido el contacto
arg
11026, Error de copia de seguridad
11036, Error de copia de seguridad
Descripción
Descripción
Se ha producido un error durante la preparación para crear una
Se ha producido un error durante la preparación para crear una
copia de seguridad.
copia de seguridad.
Error al crear el archivo backinfo.txt.
Error de escritura.
Consecuencias
Consecuencias
La petición de copia de seguridad se ha cancelado.
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
No se creó ninguna copia de seguridad.
Causas probables
Causas probables
Es posible que no tenga acceso de escritura a la unidad de
Es posible que no tenga acceso de escritura a la unidad de
destino de la copia de seguridad.
destino de la copia de seguridad.
Es posible que la unidad esté llena.
Es posible que la unidad esté llena.
Si se trata de una unidad de red, es posible que haya perdido
Si se trata de una unidad de red, es posible que haya perdido
la conexión.
la conexión.
Continúa en la página siguiente
120
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
No cree una copia de seguridad dentro del directorio HOME.
11042, Error de copia de seguridad
Acciones recomendadas
Descripción
arg
Se ha producido un error durante la preparación para crear una
copia de seguridad.
11037, Error de copia de seguridad
Error al verificar el sistema.
system.xml no está presente en el directorio SYSTEM.
Descripción
Se ha producido un error durante la preparación para crear una
Consecuencias
copia de seguridad.
La petición de copia de seguridad se ha cancelado.
Al menos uno de los nombres de módulo es demasiado largo.
No se creó ninguna copia de seguridad.
Consecuencias
Causas probables
La petición de copia de seguridad se ha cancelado.
system.xml no está presente en el directorio SYSTEM.
No se creó ninguna copia de seguridad.
Acciones recomendadas
Acciones recomendadas
Restablezca el sistema.
arg
11043, Error de copia de seguridad
11039, Error de copia de seguridad
Descripción
Descripción
Se ha producido un error durante la preparación para crear una
Se ha producido un error durante la preparación para crear una
copia de seguridad.
copia de seguridad.
Error al verificar el sistema.
La unidad está llena.
linked_m.sys no está presente en el directorio HOME.
Consecuencias
Consecuencias
La petición de copia de seguridad se ha cancelado.
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
No se creó ninguna copia de seguridad.
Acciones recomendadas
Causas probables
arg
linked_m.sys no está presente en el directorio HOME.
Acciones recomendadas
11041, Error de copia de seguridad
Restablezca el sistema.
Descripción
Se ha producido un error durante la preparación para crear una
copia de seguridad.
11044, Error de copia de seguridad
Descripción
Error al verificar el sistema.
Error al verificar la ruta de copia de seguridad.
system.xml no está instalado en el sistema.
Consecuencias
Consecuencias
La petición de copia de seguridad se ha cancelado.
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
No se creó ninguna copia de seguridad.
Causas probables
Causas probables
La ruta de copia de seguridad contiene un carácter no válido.
system.xml no está instalado en el sistema.
Acciones recomendadas
Acciones recomendadas
Verifique la ruta de copia de seguridad.
Restablezca el sistema.
11045, Error de copia de seguridad
Descripción
Error al crear el directorio de copia de seguridad debido a la
ausencia de derechos de acceso.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
121
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
11129, Error de copia de seguridad
Consecuencias
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
Causas probables
Descripción
Error durante el paso 'Configuration' de la copia de seguridad.
La ruta de copia de seguridad indicada es demasiado larga.
Ausencia de derechos de acceso en la ruta de copia de
seguridad indicada.
Consecuencias
La petición de copia de seguridad se ha cancelado.
Acciones recomendadas
No se creó ninguna copia de seguridad.
Verifique los derechos de acceso.
Causas probables
11120, Error de copia de seguridad
Descripción
La ruta de copia de seguridad indicada ha rebasado el número
máximo de caracteres permitido, que es de arg.
Acciones recomendadas
Error durante el paso 'Configuration' de la copia de seguridad.
Utilice una ruta más corta en la que crear la copia de seguridad.
Error desconocido.
11130, Error de copia de seguridad
Consecuencias
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
11127, Error de copia de seguridad
Descripción
Error durante el paso 'Configuration' de la copia de seguridad.
No hay más objetos.
Consecuencias
Descripción
La petición de copia de seguridad se ha cancelado.
Error durante el paso 'Configuration' de la copia de seguridad.
No se creó ninguna copia de seguridad.
Error al leer los parámetros de configuración.
11136, Error de copia de seguridad
Consecuencias
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
11128, Error de copia de seguridad
Descripción
Error durante el paso 'Configuration' de la copia de seguridad.
Error de escritura.
Consecuencias
Descripción
La petición de copia de seguridad se ha cancelado.
Error durante el paso 'Configuration' de la copia de seguridad.
No se creó ninguna copia de seguridad.
Error al escribir los parámetros de configuración.
Causas probables
Consecuencias
El destino está protegido contra escritura El controlador ha
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
Causas probables
perdido el contacto con un dispositivo instalado (p. ej., NFS,
FTP, USB)
Acciones recomendadas
El destino está protegido contra escritura El controlador ha
perdido el contacto con un dispositivo instalado (p. ej., NFS,
FTP, USB)
Verifique que el destino no esté protegido contra escritura
Verifique que el controlador no haya perdido el contacto con
un dispositivo instalado
Acciones recomendadas
Verifique que el destino no esté protegido contra escritura
Verifique que el controlador no haya perdido el contacto con
un dispositivo instalado
11220, Error de copia de seguridad
Descripción
Error durante la copia de seguridad de la tarea.
Error desconocido.
Consecuencias
La petición de copia de seguridad se ha cancelado.
Continúa en la página siguiente
122
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
No se creó ninguna copia de seguridad.
11222, Error de copia de seguridad
Descripción
11226, Error de copia de seguridad
Descripción
Error durante la copia de seguridad de la tarea.
Error al escribir la copia de seguridad.
Error durante la copia de seguridad de la tarea.
La copia de seguridad ya contiene directorios que se deben
crear.
Consecuencias
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
Consecuencias
Causas probables
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
El destino está protegido contra escritura El controlador ha
perdido el contacto con un dispositivo instalado (p. ej., NFS,
FTP, USB)
11223, Error de copia de seguridad
Acciones recomendadas
Descripción
Verifique que el destino no esté protegido contra escritura
Error durante la copia de seguridad de la tarea.
Verifique que el controlador no haya perdido el contacto con
El directorio carece de al menos un elemento necesario.
un dispositivo instalado
Consecuencias
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
11229, Error de copia de seguridad
Descripción
Error durante el paso 'Prepare' de la copia de seguridad.
11224, Error de copia de seguridad
La ruta de copia de seguridad indicada es demasiado larga.
Descripción
Consecuencias
Error durante la copia de seguridad de la tarea.
La petición de copia de seguridad se ha cancelado.
El directorio no existe.
No se creó ninguna copia de seguridad.
Consecuencias
Causas probables
La petición de copia de seguridad se ha cancelado.
La ruta de copia de seguridad indicada ha rebasado el número
No se creó ninguna copia de seguridad.
máximo de caracteres permitido, que es de arg.
11225, Error de copia de seguridad
Acciones recomendadas
Utilice una ruta más corta para crear la copia de seguridad.
Descripción
Error durante la copia de seguridad de la tarea.
Imposible crear el directorio.
11230, Error de copia de seguridad
Descripción
Consecuencias
Error durante la copia de seguridad de la tarea.
La petición de copia de seguridad se ha cancelado.
No hay más objetos.
No se creó ninguna copia de seguridad.
Consecuencias
Causas probables
La petición de copia de seguridad se ha cancelado.
El destino está protegido contra escritura El controlador ha
No se creó ninguna copia de seguridad.
perdido el contacto con un dispositivo instalado (p. ej., NFS,
FTP, USB)
11231, Error de copia de seguridad
Acciones recomendadas
Descripción
Verifique que el destino no esté protegido contra escritura
Verifique que el controlador no haya perdido el contacto con
Error durante la copia de seguridad de la tarea.
El directorio carece de al menos un elemento necesario.
un dispositivo instalado
Consecuencias
La petición de copia de seguridad se ha cancelado.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
123
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
No se creó ninguna copia de seguridad.
Causas probables
Compruebe si existen otros mensajes de error acerca de la
11236, Error de copia de seguridad
Descripción
Error durante la copia de seguridad de la tarea.
Error de escritura.
copia de seguridad.
11262, Error de copia de seguridad
Descripción
Error durante la copia de seguridad de la configuración del
Consecuencias
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
controlador.
Consecuencias
La petición de copia de seguridad se ha cancelado.
Acciones recomendadas
Verifique: No queda espacio libre en el dispositivo. Dispositivo
dañado.
No se creó ninguna copia de seguridad.
Causas probables
Compruebe si existen otros mensajes de error acerca de la
11237, Error de copia de seguridad
Descripción
Error durante la copia de seguridad de la tarea.
Al menos uno de los nombres de modo es demasiado largo.
copia de seguridad.
11263, Fallo en la operación de copia de
seguridad
Descripción
Consecuencias
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
El usuario arg no tiene el derecho de UAS necesario
(UAS_BACKUP) para la operación de copia de seguridad
solicitada.
11238, Error de copia de seguridad
Consecuencias
La operación de copia de seguridad no se ha realizado.
Descripción
Error durante la copia de seguridad de la tarea.
Causas probables
Poca memoria de programas libre.
El usuario no tiene el derecho UAS necesario, no ha iniciado
una sesión o tiene un id de usuario que no es válido.
Consecuencias
La petición de copia de seguridad se ha cancelado.
Acciones recomendadas
No se creó ninguna copia de seguridad.
Inicie una sesión con otro usuario que tenga el derecho UAS
necesario o añádalo al usuario existente. Si se muestra tras la
Causas probables
El proceso de copia de seguridad requiere memoria de
programas para almacenar variables persistentes.
Acciones recomendadas
generación del archivo diagnóstico del sistema, vuélvalo a
generar tras resolver los problemas del UAS.
12020, Error de restauración
Detenga el programa antes de realizar la copia de seguridad.
Reduzca el número de variables persistentes del programa.
Descripción
Error durante el paso 'Prepare' de la restauración.
Reduzca el programa de RAPID.
Error desconocido.
11261, Copia de seguridad eliminada
Acciones recomendadas
arg
Descripción
Error al crear una copia de seguridad en la ruta: arg
12023, Error de restauración
Consecuencias
La petición de copia de seguridad se ha cancelado.
No se creó ninguna copia de seguridad.
Descripción
Error durante el paso 'Prepare' de la restauración.
El directorio carece de al menos un elemento necesario.
Continúa en la página siguiente
124
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
12033, Error de restauración
Acciones recomendadas
arg
Descripción
Error durante el paso 'Prepare' de la restauración.
12024, Error de restauración
Error al restaurar los parámetros de configuración.
Descripción
Acciones recomendadas
Error durante el paso 'Prepare' de la restauración.
arg
El directorio no existe.
12035, Error de restauración
Acciones recomendadas
arg
Descripción
Error durante el paso 'Prepare' de la restauración.
12029, Error de restauración
El sistema actual y la copia de seguridad no coinciden.
Descripción
Acciones recomendadas
Error durante el paso 'Prepare' de la restauración.
arg
La ruta es demasiado larga.
12036, Error de restauración
Causas probables
Se ha rebasado el número máximo de caracteres permitido,
que es de arg.
Descripción
Error durante el paso 'Prepare' de la restauración.
Acciones recomendadas
Error de escritura.
Asegúrese de que no se hayan añadido archivos con
estructuras profundas o nombres largos a la copia de seguridad
de la que se realiza la restauración.
Acciones recomendadas
arg
12120, Error de restauración
12030, Error de restauración
Descripción
Descripción
Error durante el paso 'Prepare' de la restauración.
No hay más objetos.
Error durante el paso 'Configuration' de la restauración.
Error desconocido.
Causas probables
Acciones recomendadas
Una posible razón podría ser que el nombre de sistema contiene
arg
caracteres no admitidos.
12031, Error de restauración
12123, Error de restauración
Descripción
Error durante el paso 'Prepare' de la restauración.
El directorio carece de al menos un elemento necesario.
Descripción
Error durante el paso 'Configuration' de la restauración.
El directorio carece de al menos un elemento necesario.
Acciones recomendadas
arg
12129, Error de restauración
12032, Error de restauración
Descripción
Error durante el paso 'Prepare' de la restauración.
Descripción
La ruta es demasiado larga.
Error durante el paso 'Prepare' de la restauración.
La versión del sistema no coincide con la de la copia de
seguridad.
Causas probables
Se ha rebasado el número máximo de caracteres permitido,
que es de arg.
Acciones recomendadas
arg
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
125
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
12231, Error de restauración
Acciones recomendadas
Asegúrese de que no se hayan añadido archivos con
estructuras profundas o nombres largos a la copia de seguridad
de la que se realiza la restauración.
Descripción
Error durante la restauración de la tarea.
El directorio carece de al menos un elemento necesario.
12130, Error de restauración
12236, Error de restauración
Descripción
Error durante el paso 'Configuration' de la restauración.
No hay más objetos.
Descripción
Error durante la restauración de la tarea.
Error de escritura.
12131, Error de restauración
12320, Error de restauración
Descripción
Error durante el paso 'Configuration' de la restauración.
El directorio carece de al menos un elemento necesario.
12134, Error de restauración
Descripción
Error durante la restauración de la tarea de usuario.
Error desconocido.
12323, Error de restauración
Descripción
Error durante el paso 'Configuration' de la restauración.
Error al restaurar los parámetros de configuración.
12136, Error de restauración
Descripción
Error durante la restauración de la tarea de usuario.
El directorio carece de al menos un elemento necesario.
12338, Error de restauración
Descripción
Error durante el paso 'Configuration' de la restauración.
Error de escritura.
Descripción
Error durante la restauración de la tarea de usuario.
Tarea desconocida.
Causas probables
Es posible que haya archivos en uso situados en el directorio
12341, Error de restauración
HOME de destino. La operación de restauración no puede
Descripción
sobrescribir los archivos.
Error durante la restauración de la configuración del
Acciones recomendadas
controlador.
Compruebe si hay archivos abiertos y, en ese caso, ciérrelos.
12342, Error de restauración
12220, Error de restauración
Descripción
Descripción
Error durante la restauración de los ajustes de seguridad.
Error durante la restauración de la tarea.
Error desconocido.
12510, Máscara de subred no válida
Descripción
12230, Error de restauración
La máscara de subred arg de la interfaz de red arg no es válida.
Descripción
Error durante la restauración de la tarea.
Consecuencias
La interfaz de red no se configurará y no puede utilizarse.
No hay más objetos.
Causas probables
Es posible que la máscara de subred no esté bien escrita.
Acciones recomendadas
Asegúrese de que la máscara de subred sea correcta.
Continúa en la página siguiente
126
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
12511, Dirección IP de interfaz de red no válida
12514, Error de inicialización de interfaz de red
Descripción
Descripción
La dirección IP arg de la interfaz de red arg no es válida o falta.
No se pudo inicializar la interfaz de red arg.
Consecuencias
Consecuencias
La interfaz no se configurará y no puede utilizarse.
La interfaz no se configurará y no puede utilizarse.
Causas probables
Causas probables
Es posible que la dirección IP esté mal escrita o que ya exista
Es posible que los parámetros de la red sean incorrectos. Si
en la red.
bien es poco probable, es posible que el hardware se encuentre
en mal estado y deba reemplazarlo.
Acciones recomendadas
Asegúrese de que la dirección IP de la interfaz sea correcta y
Acciones recomendadas
que no esté duplicada.
Asegúrese de que los parámetros de red de la interfaz utilizada
sean correctos. Aísle las causas reemplazando el hardware
12512, Dirección IP no válida de pasarela de red
Descripción
La dirección IP de pasarela predeterminada arg no es válida o
falta, o bien la dirección IP de destino arg no es válida.
sospechoso.
12515, Direcciones IP de interfaz de red
solapadas
Descripción
Consecuencias
La red no estará disponible y no podrá utilizarse.
La dirección IP de red de 'arg' se solapa con la dirección IP de
'arg'.
Causas probables
Es posible que la dirección IP de la pasarela y/o las direcciones
Consecuencias
La interfaz no se configurará y no puede utilizarse.
IP de destino estén mal escritas.
Causas probables
Acciones recomendadas
Asegúrese de que las direcciones IP de la pasarela y de destino
La dirección IP y la máscara de subred se solapan con otra
dirección IP y otra máscara de subred.
sean correctas.
Acciones recomendadas
12513, No se reciben parámetros del servidor de
DHCP
Descripción
La interfaz de red arg no ha recibido ningún parámetro del
servidor de DHCP.
Asegúrese de que la dirección IP y la máscara de subred de la
interfaz sean correctas.
12610, Poca memoria RAM disponible
Descripción
Hay poca memoria RAM disponible. Tamaño de memoria RAM
Consecuencias
La interfaz no se configurará y no puede utilizarse.
total: arg bytes. Libre: arg bytes.
Consecuencias
Causas probables
La conexión de red local no funciona o el servidor de DHCP no
está activado.
La memoria del sistema podría agotarse.
Acciones recomendadas
Es recomendable reiniciar el sistema.
Acciones recomendadas
Asegúrese de que el cable de red local funcione correctamente
y que esté conectado correctamente. Asegúrese de que el
12611, Muy poca memoria RAM disponible
servidor de DHCP esté activado. Configure manualmente la
Descripción
dirección IP de red local.
Hay muy poca memoria RAM disponible. Tamaño de memoria
RAM total: arg bytes. Libre: arg bytes.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
127
5 Solución de problemas con ayuda de los registros de eventos
5.3 1 xxxx
Continuación
Consecuencias
Consecuencias
La memoria del sistema podría agotarse. Se rechazará la
El sistema entrará en el estado de fallo del sistema.
asignación de memoria a funciones que no sean críticas para
la producción.
Acciones recomendadas
Reinicie el sistema.
Acciones recomendadas
Es muy recomendable reiniciar el sistema.
12612, Muy poca memoria RAM disponible
Descripción
Descripción
No se ha especificado ningún huso horario.
Acciones recomendadas
Hay muy poca memoria RAM disponible. Tamaño de memoria
RAM total: arg bytes. Libre: arg bytes.
128
12700, Falta de información de huso horario
Utilice el FlexPendant o RobotStudio para definir el huso horario
de su ubicación.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
5.4 2 xxxx
20010, Estado de paro de emergencia
20030, Eje no conmutado
Descripción
El circuito de paro de emergencia ha sido interrumpido
Descripción
anteriormente y, mientras estaba interrumpido, se ha intentado
Uno o varios de los ejes internos de la unidad mecánica no
utilizar el robot.
están conmutados.
Consecuencias
Acciones recomendadas
El sistema permanece en el estado "En espera de Motors ON
después de paro de emergencia".
20031, Eje no calibrado.
Causas probables
Descripción
Se ha intentado manipular un control antes de devolver el
Uno o varios de los ejes de medición absoluta/relativa no están
sistema al estado Motors ON.
calibrados.
Acciones recomendadas
Acciones recomendadas
Para reanudar el funcionamiento, devuelva el sistema al estado
Asegúrese de que el eje no esté calibrado y calíbrelo.
Motors ON presionando el botón Motors ON del módulo de
control.
20032, Cuentarrevoluciones no actualizado
20011, Estado de paro de emergencia.
Descripción
Descripción
El cuentarrevoluciones no está actualizado. Uno o varios ejes
de medición absoluta no están sincronizados.
Se requiere el restablecimiento del paro de emergencia.
Acciones recomendadas
Acciones recomendadas
Mueva los ejes hasta la posición de sincronización y actualice
Libere en primer lugar el botón de paro de emergencia y
los cuentarrevoluciones.
presione a continuación el botón de panel.
20033, Eje no sincronizado.
20012, Estado de fallo de sistema activo
Descripción
Descripción
Uno o varios de los ejes de medición relativa no están
Error de sistema no recuperable. Se requiere un reinicio del
sincronizados.
controlador.
Acciones recomendadas
Acciones recomendadas
Solicite Motores ON y sincronice todas las unidades mecánicas
Apague la alimentación y enciéndala de nuevo si el comando
de la lista.
de restablecimiento de software no se ejecuta o está fuera de
alcance.
20034, Memoria del robot en mal estado
20025, Tiempo límite de orden de paro
Descripción
Descripción
Esta acción o estado no se permiten porque los datos de la
memoria del robot no se encuentran en buen estado.
La orden de paro fue ejecutada como un paro protegido forzado
al no recibir ninguna confirmación dentro del tiempo esperado.
Acciones recomendadas
Consecuencias
Todos los datos deben encontrarse en buen estado para
permitir el funcionamiento automático. Es posible mover
manualmente el robot.
Causas probables
Existen diferencias entre los datos almacenados en el robot y
en el controlador. Puede deberse a la sustitución de la tarjeta
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
129
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
de medida serie, del controlador o de ambos, o al borrado
manual de la memoria del robot.
20060, Comando no permitido
Descripción
Acciones recomendadas
Este comando no se permite en el modo automático.
Actualice la memoria del robot de la forma detallada en el
Manual del operador del IRC5.
Consecuencias
El sistema permanece en el mismo estado y la acción solicitada
20051, Comando no permitido
no se realiza.
Acciones recomendadas
Descripción
Asegúrese de que el sistema NO se encuentre en el modo
Este comando sólo se permite si el cliente tiene el control del
automático.
recurso (programa/movimiento).
20061, Comando no permitido
Consecuencias
El sistema permanece en el mismo estado y la acción solicitada
no se realiza.
Descripción
Este comando no se permite al cambiar al modo automático.
Acciones recomendadas
Compruebe si el cliente tiene el control, comprobando el valor
de "Acceso de escritura" en RobotStudio. Compruebe si el
cliente que debería tener el control lo tiene realmente.
Consecuencias
El sistema permanece en el mismo estado y la acción solicitada
no se realiza.
Acciones recomendadas
20054, Comando no permitido
Asegúrese de que el sistema NO esté cambiando al modo
automático.
Descripción
Este comando NO se permite cuando el programa se está
20062, Comando no permitido
ejecutando.
Descripción
Consecuencias
El sistema permanece en el mismo estado y la acción solicitada
Este comando no se permite en el modo manual.
Consecuencias
no se realiza.
El sistema permanece en el mismo estado y la acción solicitada
Acciones recomendadas
Asegúrese de que el programa no se esté ejecutando.
no se realiza.
Acciones recomendadas
20059, Comando no permitido
Asegúrese de que el sistema NO se encuentre en el modo
manual.
Descripción
No se permite el comando cuando el archivo que contiene los
20063, Comando no permitido
datos persistentes del sistema no es válido (el sistema se ha
iniciado con los últimos datos del sistema correctos que se
Descripción
guardaron automáticamente).
Este comando no se permite en el modo manual a máxima
velocidad.
Consecuencias
El sistema permanece en el mismo estado y la acción solicitada
Consecuencias
no se realiza.
El sistema permanece en el mismo estado y la acción solicitada
no se realiza.
Acciones recomendadas
Vuelva a los últimos datos del sistema guardados
Acciones recomendadas
automáticamente (reinicie el modo "Volver al último guardado
Asegúrese de que el sistema NO se encuentre en el modo
automático"). Restablezca el sistema (reinicie el modo
manual a máxima velocidad.
"Restablecer sistema"). Reinstale el sistema.
Continúa en la página siguiente
130
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20064, Comando no permitido
Acciones recomendadas
Asegúrese de que el sistema NO esté cambiando al modo
Descripción
Este comando no se permite al cambiar al modo manual a
máxima velocidad.
manual velocidad total.
20068, Comando no permitido
Consecuencias
El sistema permanece en el mismo estado y la acción solicitada
Descripción
Este comando no se permite en el estado de energía actual.
no se realiza.
Consecuencias
Acciones recomendadas
Asegúrese de que el sistema NO esté cambiando al modo
El sistema permanece en el mismo estado y la acción solicitada
no se realiza.
manual a máxima velocidad.
Causas probables
20065, Comando no permitido
Descripción
El comando sólo está permitido en el modo manual (a velocidad
El sistema se encuentra en un estado de ahorro de energía.
20069, Comando no permitido
Descripción
reducida o a máxima velocidad).
Este comando no se permite cuando se mueve manualmente
Consecuencias
El sistema permanece en el mismo estado y la acción solicitada
el robot.
Consecuencias
no se realiza.
El sistema permanece en el mismo estado y la acción solicitada
Acciones recomendadas
Asegúrese de que el sistema NO esté en el modo Automático
no se realiza.
ni cambiado al modo manual (a velocidad reducida o a máxima
Causas probables
velocidad).
El sistema se mueve manualmente.
20066, Comando no permitido
20070, Comando no permitido
Descripción
Descripción
La acción de entrada de sistema arg no se permite en el modo
Este comando no se permite en el estado Motores ON.
manual a velocidad total.
Consecuencias
Consecuencias
El sistema permanece en el mismo estado y la acción solicitada
El sistema permanece en el mismo estado y la acción solicitada
no se realiza.
no se realiza.
Acciones recomendadas
Acciones recomendadas
Asegúrese de que el sistema se encuentre en el estado Motores
Asegúrese de que el sistema NO se encuentre en el modo
OFF.
manual a velocidad total.
20071, Comando no permitido
20067, Comando no permitido
Descripción
Descripción
Este comando no se permite mientras se cambia al estado
La acción de entrada de sistema arg no se permite al cambiar
Motores ON.
al modo manual velocidad total.
Consecuencias
Consecuencias
El sistema permanece en el mismo estado y la acción solicitada
El sistema permanece en el mismo estado y la acción solicitada
no se realiza.
no se realiza.
Acciones recomendadas
Investigue quién ha solicitado la acción y por qué y, en caso
necesario, corrija las causas.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
131
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20072, Comando no permitido
20076, Comando no permitido
Descripción
Descripción
Este comando no se permite en el estado Motores OFF.
Este comando no se permite en el estado de fallo del sistema.
Consecuencias
Consecuencias
El sistema permanece en el mismo estado y la acción solicitada
Se ha producido un error de sistema no recuperable y se
no se realiza.
requiere un reinicio del sistema.
Acciones recomendadas
Acciones recomendadas
Asegúrese de que el sistema se encuentre en el estado Motores
Asegúrese de que el sistema NO se encuentre en el estado de
ON.
paro de emergencia. Realice un reinicio de la forma detallada
en el Manual del operador del IRC5. Si el reinicio no es posible,
20073, Comando no permitido
Descripción
Este comando no se permite mientras se cambia al estado
Motores OFF.
apague y encienda de nuevo la alimentación principal.
20080, Comando no permitido
Descripción
Este comando no se permite si el eje no ha sido conmutado.
Consecuencias
El sistema permanece en el mismo estado y la acción solicitada
Consecuencias
no se realiza.
El sistema permanece en el mismo estado y la acción solicitada
no se realiza.
Acciones recomendadas
Investigue quién ha solicitado la acción y por qué y, en caso
Acciones recomendadas
necesario, corrija las causas.
Conmute el eje de la forma detallada en el documento Additional
Axes Manual (Manual de ejes adicionales). Investigue quién
20074, Comando no permitido
ha solicitado la acción y por qué y, en caso necesario, corrija
las causas.
Descripción
Este comando no se permite en el estado de paro protegido.
20081, Comando no permitido
Consecuencias
El sistema permanece en el mismo estado y la acción solicitada
Descripción
Este comando no se permite si el eje no está calibrado.
no se realiza.
Consecuencias
Acciones recomendadas
Asegúrese de que el sistema NO se encuentre en el estado de
El sistema permanece en el mismo estado y la acción solicitada
no se realiza.
paro protegido.
Acciones recomendadas
20075, Comando no permitido
Calibre el eje de la forma detallada en las instrucciones de
calibración con Pendulum o en las instrucciones de calibración
Descripción
Este comando no se permite en el estado de paro de
emergencia.
con Levelmeter, en función del equipo que vaya a utilizar.
20082, Comando no permitido
Consecuencias
Se requiere el restablecimiento del paro de emergencia.
Descripción
Este comando no se permite si el cuentarrevoluciones del eje
Acciones recomendadas
no está actualizado.
Asegúrese de que el sistema NO se encuentre en el estado de
Consecuencias
paro de emergencia.
El sistema permanece en el mismo estado y la acción solicitada
no se realiza.
Continúa en la página siguiente
132
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20089, Modo automático rechazado
Acciones recomendadas
Actualice el cuentarrevoluciones de la forma detallada en el
Manual del operador del IRC5.
Descripción
La cadena de llamadas ha sido alterada para comenzar en una
20083, Comando no permitido
Descripción
rutina distinta de Main y no pudo ser restablecida a Main al
solicitar el modo automático.
Consecuencias
Este comando no se permite si el eje no está sincronizado.
Consecuencias
El sistema no puede pasar al modo automático.
Causas probables
El sistema permanece en el mismo estado y la acción solicitada
No fue posible situar el puntero de programa en Main.
no se realiza.
Acciones recomendadas
Acciones recomendadas
Regrese al modo manual. a) Mueva el PP a Main.
Sincronice el eje de la forma detallada en las instrucciones de
calibración con Pendulum o en las instrucciones de calibración
con Levelmeter, en función del equipo que vaya a utilizar.
b) O bien si el programa siempre debe empezar en la nueva
rutina, cambie el parámetro de sistema Main entry (dominio
Controller, tipo Task) al nuevo nombre de rutina.
c) o cambie el parámetro de sistema Controller/Auto Condition
20084, Comando no permitido
Reset/AllDebugSettings/Reset a No si el sistema debe estar
Descripción
en el modo de depuración al cambiar al modo automático.
Este comando no se permite porque los datos de la memoria
Regrese al modo automático y confirme.
del robot no se encuentran en buen estado.
20092, Comando no permitido
Consecuencias
Todos los datos deben encontrarse en buen estado para
Descripción
permitir el funcionamiento automático. Es posible mover
No se permite en el estado de inicio de E/S de sistema
manualmente el robot.
bloqueado.
Acciones recomendadas
Acciones recomendadas
Actualice la memoria del robot de la forma detallada en el
20093, Modo automático rechazado
Manual del operador' del IRC5.
20088, Modo automático rechazado
Descripción
Una o varias de las tareas de tipo NORMAL estaban
Descripción
desactivadas y no pudieron ser activadas al solicitar el modo
No fue posible cambiar la velocidad al 100% cuando se solicitó
automático.
el modo automático.
Consecuencias
Consecuencias
El sistema no puede pasar al modo automático.
El sistema no puede pasar al modo automático.
Causas probables
Causas probables
No es posible restablecer el panel de selección de tareas del
No fue posible cambiar la velocidad al 100%.
bloque sincronizado.
Acciones recomendadas
Acciones recomendadas
Regrese al modo manual. a) Cambie la velocidad en el menú
Regrese al modo manual. a) Mueva el PP a Main.
de configuración rápida.
b) o ejecute paso a paso para salir del bloque sincronizado.
b) o cambie el parámetro de sistema Controller/Auto Condition
c) o cambie el parámetro de sistema Controller/Auto Condition
Reset/AllDebugSettings/Reset a No si el sistema debe estar
Reset/AllDebugSettings/Reset a No si el sistema debe estar
en el modo de depuración al cambiar al modo automático.
en el modo de depuración al cambiar al modo automático.
Regrese al modo automático y confirme.
Regrese al modo automático y confirme.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
133
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20094, Nombre de carga no encontrado
Descripción
No se encuentra el nombre de carga arg.
20097, No se permite mover con una carga de
tipo LOCAL PERS
Descripción
El objeto arg es de tipo LOCAL PERS y no es posible realizar
Consecuencias
Imposible realizar un movimiento sin una definición correcta
de la carga.
el movimiento.
Acciones recomendadas
Cambie la carga.
Causas probables
Es posible que el módulo que contiene la definición de la carga
20098, No se permite mover con una herramienta
de tipo LOCAL PERS
se haya eliminado.
Acciones recomendadas
Cargue el módulo que contiene la definición de la carga.
Descripción
Seleccione otra carga.
El objeto arg es de tipo LOCAL PERS y no es posible realizar
el movimiento.
20095, Nombre de herramienta no encontrado
Acciones recomendadas
Cambie la herramienta.
Descripción
No se encuentra el nombre de herramienta arg.
Consecuencias
Imposible realizar un movimiento sin una definición correcta
20099, No se permite mover con un objeto de
trabajo de tipo LOCAL PERS
Descripción
de la herramienta.
El objeto arg es de tipo LOCAL PERS y no es posible realizar
Causas probables
Es posible que el módulo que contiene la definición de la
el movimiento.
Acciones recomendadas
herramienta se haya eliminado.
Cambie el objeto de trabajo.
Acciones recomendadas
Cargue el módulo que contiene la definición de la herramienta.
Seleccione otra herramienta.
20101, FlexPendant (programa) en control.
Descripción
20096, Nombre de objeto de trabajo no
encontrado
La ventana del FlexPendant tiene el foco y el control del
Descripción
Acciones recomendadas
No se encuentra el nombre de objeto de trabajo arg.
Active la ventana de producción y repita el comando.
Consecuencias
Imposible realizar un movimiento sin una definición correcta
del objeto de trabajo.
servidor de programas.
20103, Controlador ocupado actualizando el
panel selección de tareas.
Causas probables
Descripción
Es posible que el módulo que contiene la definición del objeto
El panel de selección de tareas está siendo actualizado.
de trabajo se haya eliminado.
No es posible ejecutar el comando solicitado.
Acciones recomendadas
Acciones recomendadas
Cargue el módulo que contiene la definición del objeto de
Ejecute de nuevo el comando o reinicie el sistema y ejecute
trabajo.
de nuevo el comando.
Seleccione otro objeto de trabajo.
20104, La ruta de sistema es demasiado larga.
Descripción
La ruta de sistema es demasiado larga.
Continúa en la página siguiente
134
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
El sistema no puede actuar de forma segura.
20126, Datos de carga cambiados
Consecuencias
Descripción
El sistema entrará en el estado de fallo del sistema.
La carga activa arg ha sido eliminada y sustituida con arg. Los
Acciones recomendadas
datos de la carga estaban situados en la tarea arg conectada
Mueva el sistema hasta una ubicación que presente una ruta
a la unidad mecánica arg.
de archivo más corta.
Consecuencias
Es posible que la definición de carga del movimiento no sea
20105, Copia de seguridad en proceso
correcta.
Descripción
Causas probables
Ya existe una copia de seguridad en proceso.
Los datos de carga han sido eliminados. Es posible que el
módulo que contiene la definición original de la herramienta
Consecuencias
El comando "Backup" de la señal de entrada del sistema se
rechazará.
haya sido eliminado.
Acciones recomendadas
Si necesita la definición anterior, busque el programa o el
Acciones recomendadas
Utilice la señal de salida del sistema "Backup in progress" para
módulo que contiene los datos de carga originales y cárguelo.
controlar si es posible iniciar una copia de seguridad.
20127, Datos de herramienta cambiados
20106, Ruta de copia de seguridad
Descripción
La herramienta activa arg ha sido eliminada y sustituida con
Descripción
Hay errores en la ruta de copia de seguridad o en el nombre
de la copia de seguridad en la configuración para la entrada
arg. Los datos de la herramienta estaban situados en la tarea
arg conectada a la unidad mecánica arg.
de sistema Backup. No fue posible crear el directorio para la
Consecuencias
copia de seguridad.
Es posible que la definición de herramienta del movimiento no
Ruta de copia de seguridad: arg.
sea correcta.
Nombre de copia de seguridad: arg.
Causas probables
Consecuencias
Los datos de herramienta han sido eliminados. Es posible que
El comando "Backup" de la señal de entrada del sistema se
el módulo que contiene la definición original de la herramienta
rechazará.
haya sido eliminado.
Acciones recomendadas
Acciones recomendadas
Verifique que la ruta y el nombre configurados para la entrada
Si necesita la definición anterior, busque el programa o el
de sistema Backup sean correctos.
módulo que contiene los datos de herramienta originales y
cárguelo.
20111, FlexPendant (programa) en control
20128, Datos de objeto de trabajo cambiados
Descripción
La ventana del FlexPendant tiene el foco y el control del
Descripción
servidor de programas.
El objeto de trabajo activo arg ha sido eliminado y sustituido
con arg. Los datos del objeto de trabajo estaban situados en
Acciones recomendadas
Active la ventana de producción y repita el comando.
la tarea arg conectada a la unidad mecánica arg.
Consecuencias
20120, E/S de sistema en control
Es posible que la definición de objeto de trabajo del movimiento
no sea correcta.
Descripción
Consulte el título.
Acciones recomendadas
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
135
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
Causas probables
Causas probables
Los datos del objeto de trabajo fueron eliminados. Es posible
El sistema fue cambiado al modo automático durante el reinicio
que el módulo que contiene la definición original de la
del sistema.
herramienta haya sido eliminado.
El parámetro de sistema AllDebugSettings tiene el valor Yes.
Acciones recomendadas
Acciones recomendadas
Si necesita la definición anterior, busque el programa o el
Ninguna. El sistema ha restablecido automáticamente los
módulo que contiene los datos de objeto de trabajo originales
valores de depuración.
y cárguelo.
Para conservar los valores de depuración en el modo
automático: Regrese al modo manual. Cambie el parámetro de
20130, Menú de tareas activas restaurado
sistema Controller/Auto Condition
Reset/AllDebugSettings/Reset a NO. Regrese al modo
Descripción
Durante un reinicio del sistema, el "menú de tareas activas" se
restaura en el modo automático.
Consecuencias
Si tenía una o varias tareas no activadas, volverán a estar
automático y confirme. Para obtener más información, consulte
el Manual de referencia técnica - Parámetros del sistema.
20133, Valores de depuración en el modo
automático
activadas tras el reinicio en el modo automático.
Descripción
Causas probables
Una o varias señales de E/S lógicas estaban bloqueadas
Se ha realizado un reinicio del sistema.
Acciones recomendadas
durante el inicio en el modo automático.
Consecuencias
Entre en el modo manual. Desactive las tareas no deseadas.
Vuelva al modo automático.
Las señales de E/S bloqueadas seguirán bloqueadas.
El sistema no estará en el modo de plena producción en
20131, Modo automático rechazado
automático.
Acciones recomendadas
Descripción
Para el modo de plena producción: Regrese al modo manual.
Una o varias señales de E/S lógicas estaban bloqueadas y no
Cambie el parámetro de sistema Controller/Auto Condition
pudieron ser desbloqueadas al solicitar el modo automático.
Reset/AllDebugSettings/Reset a YES. Regrese al modo
Consecuencias
automático y confirme. Para obtener más información, consulte
El sistema no puede pasar al modo automático.
el Manual de referencia técnica - Parámetros del sistema.
Causas probables
Alguna señal de E/S bloqueada no pudo ser desbloqueada.
20134, Cadena de llamadas
Acciones recomendadas
Descripción
Regrese al modo manual. a) Consulte el registro de eventos
La cadena de llamadas ha sido alterada para partir de una rutina
en busca de errores relacionados con la E/S.
distinta de main.
b) o cambie el parámetro de sistema Controller/Auto Condition
Consecuencias
Reset/AllDebugSettings/Reset a No si el sistema debe estar
El puntero de programa se restablecerá a la rutina Main.
en el modo de depuración al cambiar al modo automático.
Regrese al modo automático y confirme.
20132, Señales de E/S bloqueadas
Causas probables
El sistema fue cambiado al modo automático durante el reinicio
del sistema.
El parámetro de sistema AllDebugSettings tiene el valor Yes.
Descripción
Acciones recomendadas
Una o varias señales de E/S lógicas estaban bloqueadas
Para usar el modo de depuración en el modo automático:
durante el inicio en el modo automático.
Regrese al modo manual. Cambie el parámetro de sistema
Consecuencias
AllDebugSetting a NO. Regrese al modo automático y confirme.
Las señales bloqueadas se desbloquearán.
Continúa en la página siguiente
136
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
Para obtener más información, consulte el Manual de referencia
Consecuencias
técnica - Parámetros del sistema.
La velocidad permanecerá sin cambios.
El sistema no estará en el modo de plena producción en
20135, Valores de depuración en el modo
automático
automático.
Descripción
Para el modo de plena producción: Regrese al modo manual.
La cadena de llamadas ha sido alterada para partir de una rutina
Cambie el parámetro de sistema Controller/Auto Condition
distinta de main.
Reset/AllDebugSettings/Reset a YES. Regrese al modo
Acciones recomendadas
automático y confirme. Para obtener más información, consulte
Consecuencias
El puntero de programa no se situará en Main.
El sistema no estará en el modo de plena producción en
automático.
el Manual de referencia técnica - Parámetros del sistema.
20138, Tareas desactivadas
Descripción
Acciones recomendadas
Para el modo de plena producción: Regrese al modo manual.
Cambie el parámetro de sistema Controller/Auto Condition
Una o varias de las tareas de tipo NORMAL estaban
desactivadas durante el inicio en el modo automático.
Reset/AllDebugSettings/Reset a YES. Regrese al modo
Consecuencias
automático y confirme. Para obtener más información, consulte
Todas las tareas normales desactivadas se activarán.
el Manual de referencia técnica - Parámetros del sistema.
Causas probables
El sistema fue cambiado al modo automático durante el reinicio
20136, Velocidad reducida
del sistema.
Descripción
El parámetro de sistema AllDebugSettings tiene el valor Yes.
El sistema estaba funcionando a velocidad reducida durante
Acciones recomendadas
el inicio en el modo automático.
Ninguna. El sistema ha restablecido automáticamente los
Consecuencias
valores de depuración.
La velocidad cambiará al 100%.
Para conservar los valores de depuración en el modo
automático: Regrese al modo manual. Cambia el valor del
Causas probables
El sistema fue cambiado al modo automático durante el reinicio
del sistema.
parámetro Controller/Auto Condition
Reset/AllDebugSettings/Reset a NO. Regrese al modo
automático y confirme. Para obtener más información, consulte
Acciones recomendadas
el Manual de referencia técnica - Parámetros del sistema.
Ninguna. El sistema ha restablecido automáticamente los
valores de depuración.
Para conservar los valores de depuración en el modo
20139, Valores de depuración en el modo
automático
automático: Regrese al modo manual. Cambie el parámetro de
Descripción
sistema Controller/Auto Condition
Reset/AllDebugSettings/Reset a NO. Regrese al modo
automático y confirme. Para obtener más información, consulte
el Manual de referencia técnica - Parámetros del sistema.
Una o varias de las tareas de tipo NORMAL estaban
desactivadas durante el inicio en el modo automático.
Consecuencias
Las tareas desactivadas permanecerán desactivadas.
20137, Valores de depuración en el modo
automático
El sistema no estará en el modo de plena producción en
Descripción
Acciones recomendadas
El sistema estaba funcionando a velocidad reducida durante
Para el modo de plena producción: Regrese al modo manual.
el inicio en el modo automático.
Cambie el parámetro de sistema Controller/Auto Condition
automático.
Reset/AllDebugSettings/Reset a YES. Regrese al modo
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
137
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
automático y confirme. Para obtener más información, consulte
el Manual de referencia técnica - Parámetros del sistema.
20140, Motores ON rechazado
Descripción
20144, Detención rechazada
Descripción
La detención del programa a través de las E/S del sistema fue
rechazada.
Acciones recomendadas
El paso a Motores ON a través de las E/S del sistema fue
rechazado.
20145, Detención de ciclo rechazada
Acciones recomendadas
Descripción
20141, Motores OFF rechazado
Descripción
La detención del programa tras el ciclo a través de las E/S del
sistema fue rechazada.
Acciones recomendadas
El paso a Motores OFF a través de las E/S del sistema fue
rechazado.
20146, Interrupción manual rechazada
Acciones recomendadas
Descripción
La interrupción manual del programa a través de las E/S del
20142, Inicio rechazado
sistema fue rechazada.
Descripción
Consecuencias
El inicio/reinicio del programa a través de las E/S del sistema
La interrupción manual no se ejecutará.
fue rechazado.
Causas probables
Consecuencias
El programa se estaba ejecutando. Hay una operación de copia
No será posible iniciar el programa.
de seguridad en curso.
Causas probables
Acciones recomendadas
Puede deberse a que el robot está fuera de la distancia de
Detenga el programa antes de activar System Input Interrupt.
recuperación. El programa se estaba ejecutando. Hay una
operación de copia de seguridad en curso.
Acciones recomendadas
Realice un movimiento manual del robot hasta la zona de
recuperación o mueva el puntero de programa. Detenga el
programa antes de activar System Input Start.
20147, Carga e inicio rechazados
Descripción
La carga y el inicio del programa a través de las E/S del sistema
fueron rechazados.
Consecuencias
20143, Inicio de main rechazado
No será posible iniciar el programa.
Causas probables
Descripción
El inicio del programa en la rutina main a través de las E/S del
Los argumentos System Input Load y Start son incorrectos. El
módulo fue cargado, pero el sistema no pudo establecer el
sistema fue rechazado.
puntero de programa. El programa se estaba ejecutando. Hay
Consecuencias
una operación de copia de seguridad en curso.
No será posible iniciar el programa.
Acciones recomendadas
Causas probables
Compruebe lo siguiente: Que los argumentos de System Input
El programa se estaba ejecutando. Hay una operación de copia
de seguridad en curso.
Load and Start sean correctos. Que el nombre del archivo de
programa a cargar esté definido y sea correcto (incluida la
Acciones recomendadas
unidad de almacenamiento). Que el nombre de la tarea en la
Detenga el programa antes de activar System Input Start at
que debe cargarse el programa esté definido y sea correcto.
Main.
Que el programa estaba detenido antes de activar System Input
Load and Start.
Continúa en la página siguiente
138
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20148, Confirmación rechazada
Acciones recomendadas
Realice un movimiento manual del robot hasta la zona de
Descripción
La confirmación del restablecimiento del paro de emergencia
a través de las E/S del sistema fue rechazada.
recuperación o mueva el puntero de programa. Detenga el
programa antes de activar System Input Motors On and Start.
Acciones recomendadas
20154, Detención de instrucción rechazada
20149, Restablecimiento de error rechazado
Descripción
La detención del programa tras la instrucción a través de las
Descripción
E/S del sistema fue rechazada.
El restablecimiento del error de ejecución del programa a través
de las E/S del sistema fue rechazado.
Acciones recomendadas
Acciones recomendadas
20156, Argumento no definido
20150, Fallo de carga
Descripción
El nombre de la rutina de interrupción para la interrupción
Descripción
manual a través de las E/S del sistema no está definido.
La carga de un programa a través de la E/S del sistema ha
fallado.
Acciones recomendadas
Configure el nombre de la rutina de interrupción.
Consecuencias
No será posible iniciar el programa.
20157, Argumento no definido
Causas probables
Descripción
Los argumentos para System Input Load son incorrectos. El
módulo fue cargado, pero el sistema no pudo establecer el
El nombre del programa para la carga y el inicio a través de las
E/S del sistema no está definido.
puntero de programa. El programa se estaba ejecutando. Hay
una operación de copia de seguridad en curso.
Acciones recomendadas
Configure el nombre del programa.
Acciones recomendadas
Compruebe lo siguiente: Que los argumentos de System Input
Load sean correctos. Que el nombre del archivo de programa
20158, No hay señal de entrada de sistema
a cargar esté definido y sea correcto (incluida la unidad de
Descripción
almacenamiento). Que el nombre de la tarea en la que debe
Se ha configurado una entrada de sistema a una señal de E/S
cargarse el programa esté definido y sea correcto. Que el
que no existe.
programa estaba detenido antes de activar System Input Load.
Entrada de sistema: arg.
Nombre de señal: arg.
20153, Motors ON e inicio rechazados
Consecuencias
El sistema pasa al estado SYS FAIL.
Descripción
El paso a Motors ON y el inicio/reinicio del programa a través
Acciones recomendadas
de las E/S del sistema fueron rechazados.
Añada la señal arg a eio.cfg o elimine la entrada de sistema
arg de eio.cfg.
Consecuencias
Debe configurar una señal para cada entrada de sistema.
No será posible iniciar el programa.
Causas probables
Puede deberse a que el robot está fuera de la distancia de
20159, No hay señal de salida de sistema
recuperación. El programa se estaba ejecutando. Hay una
Descripción
operación de copia de seguridad en curso.
Se ha configurado una salida de sistema a una señal de E/S
que no existe.
Salida de sistema: arg.
Nombre de señal: arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
139
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20166, Guardado de módulo rechazado
Consecuencias
El sistema pasa al estado SYS FAIL.
Descripción
Acciones recomendadas
El módulo arg es anterior al código fuente de arg en la tarea
Añada la señal arg a eio.cfg o elimine la salida de sistema arg
arg.
de eio.cfg.
Debe configurar una señal para cada salida de sistema.
20161, Trayectoria no encontrada
Acciones recomendadas
20167, Módulo no guardado
Descripción
Descripción
El módulo de sistema arg de la tarea arg tiene una
especificación correspondiente en la configuración de "Task
modules" (Módulos de tarea) que hace referencia a una ruta
El módulo arg ha cambiado pero aún no está guardado en la
tarea arg.
Acciones recomendadas
de archivo que no existe.
20170, Sistema parado
Acciones recomendadas
Consulte "Task modules" (Módulos de tarea) en el menú
Descripción
"System Parameter" (Parámetros del sistema) y cambie la ruta
Se ha detectado un error que ha parado el sistema.
del elemento en este módulo de sistema.
Consecuencias
El sistema entra en el estado SYS STOP y el robot se ha
20162, Error de escritura
detenido a lo largo de la trayectoria. El significado completo
Descripción
de este estado se describe en el Manual de solución de
Se ha producido un error de escritura cuando el sistema
problemas del IRC5.
intentaba guardar el módulo de sistema arg
Causas probables
en arg
Existen varios errores que pueden provocar este cambio de
en la tarea arg. También es posible que el sistema no tenga
estado.
espacio libre.
Acciones recomendadas
Acciones recomendadas
Compruebe otros mensajes del registro de errores que se hayan
Consulte "Task modules" (Módulos de tarea) en el menú
producido al mismo tiempo para determinar la causa real.
"System Parameter" (Parámetros del sistema) y cambie la ruta
Solucione la causa del fallo.
del elemento en este módulo de sistema.
20171, Sistema detenido
20164, Fallo de reconfiguración
Descripción
Descripción
Se ha detectado un error que ha detenido el sistema.
Aún hay módulos de sistema no guardados.
Consecuencias
Acciones recomendadas
El sistema entra en el estado SYSHALT, el programa y el
Lea las descripciones del error en los mensajes anteriores.
movimiento del robot se han parado y los motores se han
Vuelva a intentar el inicio del sistema.
apagado. El significado completo de este estado se describe
en el Manual de solución de problemas del IRC5.
20165, Puntero de programa perdido.
Causas probables
Descripción
Existen varios errores que pueden provocar este cambio de
Ya no es posible reiniciar a partir de la posición actual.
estado.
Acciones recomendadas
Acciones recomendadas
Es necesario iniciar el programa desde el principio.
Compruebe otros mensajes del registro de errores que se hayan
producido al mismo tiempo para determinar la causa real.
Solucione la causa del fallo. Reinicie el programa.
Continúa en la página siguiente
140
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20172, Fallo del sistema
contaminación en los contactores de los cables o a una avería
en los devanados del motor.
Descripción
Se ha detectado un error que ha provocado un fallo del sistema.
Acciones recomendadas
Asegúrese de que el cable del motor esté conectado
Consecuencias
El sistema pasa al estado SYSFAIL. El programa y el
movimiento del robot se han parado y los motores se han
apagado. El significado completo de este estado se describe
en el Manual de solución de problemas del IRC5.
Causas probables
correctamente a la unidad de accionamiento. Compruebe el
cable y el motor midiendo sus respectivas resistencias.
Desconecte antes de la medición. Sustituya cualquier
componente defectuoso.
20178, Nombre de tarea incorrecto configurado
Existen varios errores que pueden provocar este cambio de
Descripción
estado.
El nombre de tarea incorrecto arg ha sido configurado para la
Acciones recomendadas
entrada de sistema arg.
Compruebe otros mensajes del registro de errores que se hayan
producido al mismo tiempo para determinar la causa real.
Solucione la causa del fallo. Realice un reinicio del sistema de
la forma detallada en el Manual del operador del IRC5.
Consecuencias
La señal de entrada digital no estará conectada al evento
especificado.
Acciones recomendadas
20176, Salida analógica de sistema fuera de
límites
Modifique la configuración y reinicie el sistema.
20179, Memoria de disco en un nivel bajo crítico
Descripción
El valor arg de la salida de sistema arg, señal arg, está fuera
Descripción
de sus límites (mín. lógico: arg m/s, máx. lógico: arg m/s).
La capacidad de almacenamiento libre del disco ha alcanzado
un nivel crítico. En este momento está por debajo de los 10
Consecuencias
El nuevo valor no se ha establecido y se conserva el valor
Mb. La ejecución de programas de RAPID se detendrá.
Consecuencias
anterior de la señal analógica.
El espacio libre del disco está muy cerca de llenarse
Causas probables
Los límites lógicos superior y/o inferior de la señal pueden estar
completamente. Cuando esto ocurra, el sistema no podrá
funcionar.
mal definidos.
Causas probables
Acciones recomendadas
Ajuste los valores de los límites lógicos superior y/o inferior
para la señal y reinicie el controlador.
Demasiados datos en el disco.
Acciones recomendadas
Guarde los archivos en otro disco conectado a la red. Borre
20177, Cortocircuito en circuito de fase de motor
datos del disco. Después de eliminar archivos del disco, reinicie
el programa.
Descripción
El motor o el cable de motor del eje arg del módulo de
accionamiento arg y la unidad de accionamiento número arg
20181, Restablecimiento de sistema rechazado.
Descripción
es un cortocircuito.
No se permite restablecer el sistema a través de las E/S del
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS HALT.
sistema.
Acciones recomendadas
Causas probables
Puede deberse a un motor o un cable de motor en mal estado.
También puede estar causado por la existencia de
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
141
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20182, La señal de entrada del sistema QuickStop
no tiene efecto.
Consecuencias
Se rechazarán los cambios realizados en la configuración del
sistema o en los programas de RAPID desde arg.
Descripción
Ya se ha iniciado una acción de parada.
Acciones recomendadas
Compruebe otros mensajes del registro de eventos que se
Acciones recomendadas
hayan producido al mismo tiempo para determinar la causa
20184, Argumento incorrecto para entradas del
sistema
real. Si resulta viable, vuelva a los últimos datos del sistema
guardados automáticamente. Reinstale el sistema. Compruebe
la cantidad de espacio libre en el disco. Si es necesario, elimine
datos para aumentar la capacidad de disco disponible.
Descripción
Se ha declarado un modo de arranque no definido para las E/S
del sistema.
20189, Datos de robot no válidos
Acciones recomendadas
Descripción
Imposible cargar los datos de robot independientes de sistema
20185, Nombre incorrecto
del archivo arg.
El archivo existe porque el contenido no es válido. Código
Descripción
Se ha declarado un nombre no definido en la configuración
interno: arg.
Acciones recomendadas
runchn_bool actual.
Compruebe los demás mensajes registrados para conocer las
Acciones recomendadas
acciones necesarias.
20187, Archivo de registro de diagnóstico creado
Asegúrese de que queda memoria libre en el dispositivo.
Descripción
20192, Memoria de disco casi agotada
Debido a uno de los distintos fallos posibles, se ha creado un
archivo de diagnóstico del sistema en arg. Este archivo contiene
información de depuración interna y se ha diseñado para los
fines de solución de problemas y depuración.
Descripción
La capacidad de almacenamiento libre del disco es inferior a
los 25 MB. Cuando descienda hasta los 10 MB, se detendrá la
ejecución de los programas de RAPID.
Consecuencias
El sistema reaccionará ante el error dando lugar a un paro,
como se especifica en su propio texto del registro de eventos.
Consecuencias
La capacidad del disco está a punto de agotarse. Cuando esto
ocurra, el sistema no podrá funcionar.
Causas probables
Existen varios errores que pueden provocar esta situación. Por
lo general, los fallos que hacen que el sistema pase al estado
Causas probables
Demasiados datos en el disco.
de fallo del sistema también crean un archivo de registro de
Acciones recomendadas
diagnóstico.
Guarde los archivos en otro disco conectado a la red. Borre
datos del disco.
Acciones recomendadas
Si es necesario, puede añadir este archivo al final de un informe
de errores para enviarlo a su representante local de ABB.
20193, Aviso de actualización de datos de robot
Descripción
20188, Datos de sistema no válidos
Los valores de sincronización de los ejes y los datos de
información de servicio (SIS) han sido restaurados desde la
Descripción
El contenido del archivo arg, que contiene datos persistentes
del sistema, no es válido. Código de error interno: arg. El
sistema ha sido reiniciado utilizando los últimos datos válidos
del sistema, guardados anteriormente en arg.
copia de seguridad.
Los datos de robot independiente de sistema no se guardaron
durante el cierre del sistema. Los datos han sido restaurados
desde la última copia de seguridad.
Continúa en la página siguiente
142
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
Acciones recomendadas
Asegúrese de que queda suficiente memoria libre en el
dispositivo.
Es posible que la batería de respaldo se haya descargado.
Compruebe el registro de hardware.
20197, Imposible encontrar los datos de sistema
de la última vez que apagó el sistema
Descripción
Por lo general, todos los datos de sistema se guardan al apagar.
Resulta imposible encontrar el archivo con los datos
20194, Datos de sistema no copiados
Descripción
persistentes del sistema. El sistema se ha reiniciado utilizando
los últimos datos válidos del sistema, guardados anteriormente
en arg.
El sistema se ha restaurado correctamente, pero no fue posible
crear una copia de seguridad de los datos de sistema actuales.
Consecuencias
Los cambios realizados en la configuración del sistema o en
Acciones recomendadas
los programas de RAPID desde arg NO estarán disponibles
Asegúrese de que queda suficiente memoria libre en el
después del reinicio. Tendrá que implementar de nuevo estos
dispositivo arg.
cambios.
Causas probables
20195, Se han perdido los datos de sistema de
la última vez que apagó el sistema
Es posible que tenga que mover o eliminar manualmente el
Descripción
Acciones recomendadas
Por lo general, todos los datos de sistema se guardan al apagar.
Compruebe la ubicación y la disponibilidad del archivo de datos
Durante el último apagado, el guardado de los datos falló. El
de sistema guardado. Si fuera posible, reinicie con regreso al
sistema se ha reiniciado utilizando los últimos datos válidos
último guardado automático para aceptar los últimos datos
del sistema, guardados anteriormente en arg.
válidos del sistema. Reinstale el sistema.
archivo que contiene los datos de sistema guardados.
Consecuencias
Los cambios realizados en la configuración del sistema o en
los programas de RAPID desde arg NO estarán disponibles
después del reinicio. Tendrá que implementar de nuevo estos
20199, SoftStop de sistema rechazado
Descripción
La entrada de sistema SoftStop no se permite.
cambios.
Acciones recomendadas
Causas probables
Es posible que el banco de energía de respaldo estuviera
20270, Error de acceso
descargado en el momento del apagado. Es posible que el
Descripción
disco de almacenamiento esté lleno.
Error de acceso al módulo de panel.
Acciones recomendadas
Compruebe otros mensajes de eventos que se hayan producido
Acciones recomendadas
al mismo tiempo para determinar la causa real. Si fuera posible,
Examine los archivos de configuración de E/S.
reinicie con regreso al último guardado automático para aceptar
los últimos datos válidos del sistema. Reinstale el sistema.
Compruebe la cantidad de espacio libre en el disco. Si es
necesario, elimine datos para aumentar la capacidad de disco
disponible.
20280, Conflicto de símbolo
Descripción
La señal arg definida en la configuración de E/S está en
conflicto con otro símbolo de programa que tiene el mismo
nombre. Por ello, esta señal no se asignará a ninguna variable
20196, Módulo guardado
de programa.
Descripción
Acciones recomendadas
Durante la reconfiguración del sistema se ha encontrado un
Cambie el nombre de la señal en la configuración de E/S.
módulo modificado pero no guardado aún.
El módulo se ha guardado en arg.
Acciones recomendadas
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
143
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20281, Error de configuración de E/S
Descripción
20286, Señal de E/S no exclusiva para la salida
de sistema
arg arg con el nombre de señal arg corresponde a un tipo de
Descripción
señal incorrecto. Encontrado: arg. Se esperaba: arg.
Cada salida de sistema debe tener configurada una señal de
E/S exclusiva.
Acciones recomendadas
Modifique la configuración y reinicie el sistema.
No es posible asignar la misma señal de E/S a varias salidas
de sistema.
20282, Recurso e índice ya existentes
Salida de sistema: arg.
Nombre de señal: arg.
Descripción
Acciones recomendadas
Recurso arg.
Índice arg.
20287, Señal de E/S no exclusiva para la entrada
de sistema
Acciones recomendadas
20283, La base de datos de texto está llena.
Descripción
Cada entrada de sistema debe tener configurada una señal de
Descripción
E/S exclusiva.
Recurso arg.
No es posible asignar la misma señal de E/S a varias entradas
Índice arg.
de sistema.
Acciones recomendadas
Entrada de sistema: arg.
Nombre de señal: arg.
20284, Tipo de señal incorrecto para una entrada
de sistema
20288, Tipo desconocido de salida de sistema
Descripción
Descripción
La entrada de sistema arg está configurada con un tipo
El tipo de salida de sistema que se ha configurado es
incorrecto de señal de E/S.
desconocido en este sistema.
La señal de E/S arg corresponde al tipo arg, mientras que esta
Salida de sistema desconocida: arg.
entrada de sistema requiere el tipo de señal de E/S arg.
Acciones recomendadas
Acciones recomendadas
Compruebe si el nombre de la salida de sistema está bien
Modifique la configuración de la entrada de sistema
escrito.
especificada.
20289, Tipo desconocido de entrada de sistema
20285, Tipo de señal incorrecto para una salida
de sistema
Descripción
Descripción
desconocido en este sistema.
La salida de sistema arg está configurada con un tipo incorrecto
Entrada de sistema desconocida: arg.
de señal de E/S.
Acciones recomendadas
La señal de E/S arg corresponde al tipo arg, mientras que esta
Compruebe si el nombre de la entrada de sistema está bien
salida de sistema requiere el tipo de señal de E/S arg.
escrito.
El tipo de entrada de sistema que se ha configurado es
Acciones recomendadas
Modifique la configuración de la salida de sistema especificada.
20290, Nombre de unidad mecánica desconocido
para la salida de sistema
Descripción
Se ha configurado una salida de sistema con un nombre de
unidad mecánica desconocido en este sistema.
Continúa en la página siguiente
144
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20294, La acción arg no puede ser realizada.
Salida de sistema: arg.
Nombre de unidad mecánica: arg.
Descripción
Acciones recomendadas
La acción solicitada no puede realizarse dado que la unidad
La unidad mecánica especificada debe estar configurada para
de E/S no responde.
poder usarla con salidas de sistema.
Compruebe si el nombre de la unidad mecánica está bien
escrito.
Consecuencias
No es posible decidir si la acción tiene restricciones asignadas.
Causas probables
20291, Tipo desconocido de restricción de
entrada de sistema
La acción solicitada no se realizará hasta que la unidad de E/S
vuelva a estar activada.
Acciones recomendadas
Descripción
El tipo de restricción de entrada de sistema que se ha
configurado es desconocido en este sistema.
Restricción de entrada de sistema desconocida: arg.
Acciones recomendadas
No desactive en ningún caso las unidades que contengan
entradas o salidas de sistema.
20295, La señal no puede usarse como salida de
sistema.
Compruebe si el nombre de la restricción de entrada de sistema
Descripción
está bien escrito.
La salida de sistema arg está configurada con una señal de
20292, Restricción desconocida de entrada de
sistema
E/S que pertenece a una categoría incorrecta. La señal de E/S
arg tiene la categoría Seguridad y no puede usarse como salida
de sistema.
Descripción
La restricción de entrada de sistema que se ha configurado es
Acciones recomendadas
Seleccione otra señal o cámbiela a otra categoría.
desconocida en este sistema.
Tipo de restricción de entrada de sistema: arg.
Restricción de entrada de sistema desconocida: arg.
20296, Nombre de tarea incorrecto configurado
Acciones recomendadas
Descripción
Compruebe si el nombre de la restricción de entrada de sistema
El nombre de tarea incorrecto arg ha sido configurado para la
está bien escrito.
salida de sistema arg.
Consecuencias
20293, La acción solicitada está restringida
La señal de salida digital no estará conectada al evento
especificado.
Descripción
La arg solicitada está restringida por la entrada de sistema arg
Acciones recomendadas
activada por la señal de E/S arg.
Modifique la configuración y reinicie el sistema.
Consecuencias
20297, Fallo de comunicación de salida de
sistema
La acción solicitada no tendrá lugar.
Causas probables
Es posible que la entrada de sistema arg sea activada por un
Descripción
equipo externo, como PLCs u otros elementos, debido a varios
Imposible cambiar el valor de la señal de E/S arg conectada a
motivos posibles.
la salida de sistema arg.
Acciones recomendadas
Consecuencias
Investigue por qué se ha activado la entrada de sistema y, en
El sistema pasa al estado SYS HALT.
caso necesario, corrija las causas.
Causas probables
La conexión a la unidad de E/S puede haberse perdido.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
145
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20298, Nombre de unidad mecánica desconocido
para la entrada de sistema
Causas probables
Es posible que la configuración haya sido editada sin un editor
de configuraciones adecuado.
Descripción
Se ha configurado una entrada de sistema con un nombre de
Acciones recomendadas
unidad mecánica desconocido en este sistema.
La señal de E/S de sistema debe ser reconfigurada,
Entrada de sistema: arg.
preferiblemente con el editor de configuraciones de RobotStudio
Nombre de unidad mecánica: arg.
o en el FlexPendant.
Acciones recomendadas
La unidad mecánica especificada debe estar configurada para
20325, Supervisión de SC arg no activada
poder usarla con entradas de sistema.
Descripción
Compruebe si el nombre de la unidad mecánica está bien
No hay ninguna configuración de usuario en el Safety Controller
escrito.
(SC), es decir, la supervisión de seguridad está desactivada.
Consecuencias
20321, No es un número
El SC no puede detener el movimiento del robot.
Descripción
Causas probables
Se encontró un valor que no es un número en la tarea arg.
No hay ninguna configuración de usuario en el SC o no hay
Se encontró un símbolo del tipo 'arg' que contenía un número
ningún SC conectado al Drive Module arg.
no definido.
Acciones recomendadas
Consecuencias
Descargue una nueva configuración de usuario al SC. Active
El número no definido fue reemplazado por 'arg'.
la configuración reiniciando el sistema introduciendo el código
PIN.
20322, Infinito positivo
20350, Nombre de tarea no válido
Descripción
Se encontró un infinito positivo en la tarea arg.
Descripción
Se encontró un símbolo del tipo 'arg' que contenía un infinito
El nombre de tarea arg no puede usarse como nombre de tarea.
positivo.
Ya se está utilizando como un símbolo instalado o como una
Consecuencias
palabra reservada del sistema, o bien es demasiado largo
El infinito positivo fue reemplazado por 'arg'.
(máximo 16 caracteres).
Consecuencias
20323, Infinito negativo
La tarea no se instalará en el sistema.
Descripción
Acciones recomendadas
Se encontró un infinito negativo en la tarea arg.
Modifique la configuración del nombre de la tarea y reinicie el
Se encontró un símbolo del tipo 'arg' que contenía un infinito
controlador.
negativo.
20351, Superado el número máximo de tareas
Consecuencias
El infinito negativo fue reemplazado por 'arg'.
Descripción
Se ha superado el número máximo de tareas, arg, del tipo de
20324, Argumento incorrecto para una señal de
E/S del sistema
configuración arg.
Descripción
No se instalarán todas las tareas configuradas.
arg cambiado a la señal arg con un argumento incorrecto.
Acciones recomendadas
Consecuencias
Modifique la configuración y reinicie el sistema.
Consecuencias
No será posible usar arg.
Continúa en la página siguiente
146
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20352, Nombre de planificador de movimientos
no válido
Consecuencias
La tarea no se instalará o no será posible ejecutar las
instrucciones de movimiento de RAPID.
Descripción
El nombre del planificador de movimientos del grupo de
Acciones recomendadas
unidades mecánicas arg de arg no es correcto.
Modifique la configuración y reinicie el controlador.
Puede deberse a uno de los motivos siguientes: Nombre vacío.
en otro grupo de unidades mecánicas.
20356, Superado el número máximo de tareas de
movimiento
Consecuencias
Descripción
El sistema no podrá utilizarlo.
Sólo se permite usar arg tareas para controlar las unidades
No presente en la configuración de movimientos. Ya utilizado
mecánicas, es decir, para ejecutar las instrucciones de
Acciones recomendadas
Modifique la configuración y reinicie el controlador.
movimiento de RAPID.
Acciones recomendadas
20353, Unidad mecánica no encontrada
Descripción
La unidad mecánica arg de arg no se encuentra en la lista de
Modifique la configuración y reinicie el controlador.
20357, Tarea de movimiento no configurada
Descripción
unidades mecánicas configuradas.
No hay ninguna tarea configurada para controlar las unidades
Consecuencias
No es posible ejecutar instrucciones de RAPID que utilicen las
mecánicas, es decir, para ejecutar las instrucciones de
movimiento de RAPID.
unidades mecánicas configuradas.
Consecuencias
Causas probables
Es probable que la unidad no esté presente en la configuración
No es posible ejecutar instrucciones de movimiento de RAPID.
Acciones recomendadas
de movimientos.
Reinstale el sistema y asegúrese de incluir un robot.
Acciones recomendadas
Modifique la configuración y reinicie el controlador.
20354, Argumento no definido
20358, No hay ningún miembro de arg
configurado
Descripción
Descripción
El argumento arg configurado para la tarea arg no corresponde
El tipo de configuración es obligatorio en los sistemas con
varios robots.
a ningún tipo válido.
Consecuencias
Consecuencias
El comportamiento de la tarea quedará sin definir.
No es posible ejecutar ninguna instrucción de movimiento de
RAPID.
Acciones recomendadas
Modifique la configuración y reinicie el controlador.
Acciones recomendadas
Modifique la configuración y reinicie el controlador.
20355, Nombre incorrecto de grupo de unidades
mecánicas
20359, Tipo de configuración arg ya configurado
Descripción
Descripción
El nombre de arg configurado en la tarea arg no es correcto.
Puede deberse a las causas siguientes: El argumento no se
El tipo se ha encontrado pero no se esperaba en un sistema
que tiene las opciones actuales.
utiliza en la configuración. El nombre configurado no pertenece
Acciones recomendadas
al grupo de unidades mecánicas. El nombre configurado ya se
Compruebe si ha cargado el archivo de configuración correcto
está utilizando en otra tarea.
o elimine todas las instancias del tipo.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
147
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20365, Actualización de configuración terminada
Reinicie el controlador.
20360, Evento desconocido en tipo de
configuración arg
Descripción
Descripción
Todas las tareas se devuelven a su rutina Main como
consecuencia de los cambios de configuración.
Acciones recomendadas
El evento arg no es un evento de sistema.
20366, Error de tipo en configuración de tarea
Acciones recomendadas
Modifique la configuración y reinicie el sistema.
20361, Sólo módulos compartidos para la tarea
compartida
Descripción
Descripción
La tarea arg se ha configurado con un tipo incorrecto. La tarea
configurada para controlar las unidades mecánicas, es decir,
para ejecutar las instrucciones de movimiento de RAPID, debe
ser del tipo arg.
El módulo arg no está configurado como compartido y no puede
ser cargado en la tarea compartida.
Consecuencias
La tarea no se instalará.
Acciones recomendadas
Acciones recomendadas
Modifique la configuración y reinicie el sistema.
20362, Nombre de tarea no definido
Descripción
Modifique la configuración y reinicie el controlador.
20367, Unidades mecánicas no configuradas
Descripción
La tarea arg del tipo de configuración arg no está configurada
en el sistema.
La instancia arg del tipo de configuración arg no tiene ningún
argumento de unidad mecánica.
Acciones recomendadas
Consecuencias
Modifique la configuración y reinicie el sistema.
No será posible realizar ninguna acción con el sistema de
movimiento, es decir, no se podrán ejecutar instrucciones de
20363, Módulo no de sistema
movimiento de RAPID.
Descripción
Acciones recomendadas
El módulo arg cargado desde el archivo arg no es un módulo
Modifique la configuración y reinicie el controlador.
de sistema.
Acciones recomendadas
Cambie el sufijo o añada un atributo de módulo al módulo.
Vuelva a cargar el módulo o reinicie el sistema.
20368, Grupo de unidades mecánicas no
conectado
Descripción
No hay ninguna tarea de movimiento conectada al grupo de
20364, Superado el número máximo de grupos
de unidades mecánicas
unidades mecánicas arg.
Descripción
No será posible utilizar las unidades mecánicas que
Se ha superado el número máximo de grupos de unidades
pertenezcan a este grupo.
mecánicas, arg, del tipo de configuración arg.
Consecuencias
Causas probables
Consecuencias
La causa de este error puede ser que falta una instancia de
Las instancias posteriores al número máximo no se tendrán
tarea de RAPID en el dominio de controlador de la
en cuenta.
configuración, o que una tarea no esté configurada como una
Acciones recomendadas
tarea de movimiento.
Modifique la configuración y reinicie el controlador.
Continúa en la página siguiente
148
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
Acciones recomendadas
Añada una instancia de tarea de movimiento que esté
conectada al grupo de unidades mecánicas. Convierta una
tarea sin movimiento existente en una tarea de movimiento.
Elimine el grupo de unidades mecánicas. Compruebe si hay
nombres mal escritos.
20371, Se utiliza un grupo predeterminado de
unidades mecánicas
Descripción
La configuración de la tarea arg no tiene ninguna conexión con
arg. El atributo arg es obligatorio en los sistemas MultiMove,
pero no se ha encontrado.
20369, Configuración confusa de parámetros de
sistema.
Consecuencias
La tarea no realiza ningún movimiento con la unidad mecánica
pero puede leer los datos de movimiento. Las funciones de
Descripción
RAPID pueden fallar si leen datos de movimiento y éstos están
Existe una mezcla de estructuras anteriores y nuevas del tipo
System Misc.
conectados a la unidad mecánica incorrecta. El grupo de
unidades mecánicas de arg ha sido conectado a la tarea.
Consecuencias
Causas probables
Es posible que se hayan configurado parámetros incorrectos.
El atributo no fue especificado al crear la configuración. Es
Causas probables
posible que el archivo de configuración haya sido creado en
Se han cargado en el sistema las estructuras anteriores y las
un sistema que no es MultiMove.
nuevas.
Acciones recomendadas
Acciones recomendadas
Asegúrese de que el grupo de unidades mecánicas correcto
Compruebe que haya configurado los parámetros correctos.
esté conectado a la tarea.
Actualice los parámetros de System Misc con los valores
correctos. Guarde el dominio del controlador y sustituya el
archivo de configuración anterior.
20372, Imposible leer los datos de configuración.
Descripción
20370, Imposible leer datos de configurac. para
distancia de recuperación
El sistema no pudo leer los datos de configuración del tipo
<arg>.
Consecuencias
Descripción
No serán posibles ni la Edición en marcha ni la modificación
El sistema no pudo leer los datos de configuración del tipo <
de posición.
arg>. La distancia de recuperación es el límite en el que el
sistema emitirá un aviso antes de un inicio con movimiento de
Causas probables
El archivo sys.cfg cargado en el sistema no contiene ninguna
recuperación.
información de Edición en marcha ni modificación de posición.
Consecuencias
No se ha cargado ningún archivo sys.cfg debido a los errores
Se utilizará el valor predeterminado de la distancia de
detectados en el archivo.
recuperación.
Acciones recomendadas
Causas probables
Cargue un nuevo archivo sys.cfg y reinicie el sistema.
El archivo sys.cfg cargado en el sistema no contiene ninguna
información de distancia de recuperación. No se ha cargado
20373, Falta el nombre de tarea
ningún archivo sys.cfg debido a los errores detectados en el
Descripción
archivo.
No se ha indicado ninguna tarea para el módulo arg en el tipo
Acciones recomendadas
Cargue un nuevo archivo sys.cfg y reinicie el sistema.
de configuración arg.
Acciones recomendadas
Modifique la configuración y reinicie el sistema.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
149
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20380, Ningún planificador de mov. conectado a
la unidad mecánica
20391, Inicio de main rechazado
Descripción
El inicio del programa en main a través de las E/S del sistema
La unidad mecánica arg no tiene conectado ningún planificador
fue rechazado.
de movimientos.
Se debe a que el acceso de escritura está retenido por arg con
Descripción
arg.
Consecuencias
No es posible utilizar esta unidad mecánica en operaciones
Acciones recomendadas
como la calibración o la activación.
Causas probables
20392, Interrupción manual rechazada
Es probable que la causa de este error sea un error en la
Descripción
configuración.
La interrupción manual del programa a través de las E/S del
Acciones recomendadas
sistema fue rechazada.
Compruebe la configuración del movimiento y/o del controlador.
Se debe a que el acceso de escritura está retenido por arg con
arg.
20381, Error al volver a crear la trayectoria tras
una caída de aliment.
Acciones recomendadas
Descripción
20393, Carga e inicio rechazados
La trayectoria no se volvió a crear correctamente.
Descripción
Consecuencias
La carga y el inicio del programa a través de las E/S del sistema
Debe mover el puntero de programa antes del reinicio del
fueron rechazados.
programa. Se recomienda mover el robot hasta una posición
Se debe a que el acceso de escritura está retenido por arg con
segura, a pesar de que el robot quizá no siga la trayectoria
arg.
inicial al reiniciarse.
Acciones recomendadas
Causas probables
Existen varios errores que pueden provocar esta situación. Por
lo general, los fallos que hacen que el sistema pase al estado
SYS FAIL también hacen que no se pueda volver a crear la
trayectoria tras la caída de alimentación.
20394, Motores ON e inicio rechazados
Descripción
El paso a Motores ON y el inicio/reinicio del programa a través
de las E/S del sistema fueron rechazados.
Acciones recomendadas
Se debe a que el acceso de escritura está retenido por arg con
Compruebe otros mensajes del registro de errores que se hayan
arg.
producido al mismo tiempo para determinar la causa real.
Acciones recomendadas
Solucione la causa del fallo. Mueva el robot hasta una posición
segura antes del reinicio. Es posible que el robot no siga la
trayectoria original.
20395, Carga rechazada
Descripción
La carga del programa a través de las E/S del sistema fue
20390, Inicio rechazado
rechazada.
Descripción
Se debe a que el acceso de escritura está retenido por arg con
El inicio/reinicio del programa a través de las E/S del sistema
arg.
fue rechazado.
Se debe a que el acceso de escritura está retenido por arg con
arg.
20396, Interrupción manual rechazada
Descripción
Acciones recomendadas
La interrupción manual del programa a través de las E/S del
sistema fue rechazada en la tarea arg.
Continúa en la página siguiente
150
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
La interrupción manual no se permite durante el movimiento
Causas probables
sincronizado.
El sistema fue cambiado al modo automático durante el reinicio
del sistema.
20397, Interrupción manual rechazada
Acciones recomendadas
Descripción
Ninguna. El sistema ha restablecido automáticamente los
La interrupción manual del programa a través de las E/S del
valores de depuración.
sistema fue rechazada en la tarea arg.
Para mantener la configuración de depuración en automático:
La interrupción se conecta a arg, que no es un procedimiento
Regrese al modo automático. Cambie el parámetro de sistema
válido de RAPID.
Controller/Auto Condition Reset/AllDebugSettings/Reset a NO.
Regrese al modo automático y confirme. Para obtener más
Consecuencias
información, consulte el Manual de referencia técnica -
arg no se ejecutará.
Parámetros del sistema.
Causas probables
arg no existe. arg no es un procedimiento (PROC) que admita
cero parámetros (0).
Acciones recomendadas
20400, Valores de depuración en el modo
automático
Descripción
Asegúrese de que arg sea un procedimiento existente (PROC)
que admita cero (0) parámetros.
Una tarea estática/semiestática (sinónimo de tarea en segundo
plano) ha sido detenida.
20398, Modo automático rechazado
Consecuencias
La tarea estática/semiestática no se iniciará.
Descripción
El sistema no estará en el modo de plena producción en
Una tarea estática/semiestática detenida (sinónimo de una
automático.
tarea de segundo plano) no pudo ser iniciada al solicitar el
modo automático.
Acciones recomendadas
Para el modo de plena producción: Regrese al modo manual.
Consecuencias
Cambia el valor del parámetro Controller/Auto Condition
El sistema no puede pasar al modo automático.
Reset/AllDebugSettings/Reset a Yes. Regrese al modo
Causas probables
automático y confirme. Para obtener más información, consulte
Una tarea estática/semiestática detenida no pudo ser iniciada.
el Manual de referencia técnica - Parámetros del sistema.
Acciones recomendadas
Regrese al modo manual. Asegúrese de que todas las tareas
20401, Demasiadas instancias de CFG
estáticas/semiestáticas tengan un programa o módulo que
Descripción
contenga la entrada de producción configurada. Asegúrese de
Hay demasiadas instancias arg del tipo arg en el tema arg.
que ninguna tarea estática/semiestática presente errores de
sintaxis. Regrese al modo automático y confirme.
20399, Tarea estática/semiestática iniciada
Consecuencias
Es posible que llegue a utilizar una instancia incorrecta, dando
lugar a un comportamiento inesperado.
Causas probables
Descripción
Existen múltiples instancias de arg del tipo arg en el tema arg.
Al menos una tarea estática/semiestática (sinónimo de tarea
de segundo plano) no se estaba ejecutando tras la puesta en
marcha en el modo automático.
Consecuencias
Acciones recomendadas
Elimine todas las instancias excepto una.
20402, Modo automático rechazado
La ejecución fue iniciada en al menos una tarea
Descripción
estática/semiestática.
Una sesión activa de RAPID Spy no pudo ser desactivada
cuando se solicitó el modo automático.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
151
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20408, PP a Main rechazado
Consecuencias
El sistema no puede pasar al modo automático.
Descripción
Causas probables
El cambio del PP a Main a través de la E/S del sistema fue
RAPID Spy no pudo ser desactivado.
rechazada.
Acciones recomendadas
Se debe a que el acceso de escritura está retenido por arg con
Regrese al modo manual. Use un cliente externo, por ejemplo
arg.
RobotStudio, para desactivar RAPID Spy. Regrese al modo
20409, PP a Main rechazado
automático y confirme.
20403, RAPID Spy desactivado
Descripción
El cambio del PP a Main a través de la E/S del sistema fue
Descripción
rechazada.
RAPID Spy fue desactivado tras la puesta en marcha en el
Consecuencias
modo automático.
El PP no se cambió a Main.
Consecuencias
Causas probables
RAPID Spy fue desactivado.
Puede deberse a que el programa se estaba ejecutando o que
Causas probables
no hay cargado ningún programa que contenga el
El sistema fue cambiado al modo automático durante el reinicio
procedimiento Main.
del sistema.
Acciones recomendadas
Acciones recomendadas
Asegúrese de que la ejecución del programa esté detenida y
Ninguna. El sistema ha restablecido automáticamente los
que esté cargado un programa que contenga el procedimiento
valores de depuración.
Main.
Para mantener la configuración de depuración en automático:
Regrese al modo manual. Cambie el parámetro de sistema
Controller / Auto Condition Reset / AllDebugSettings / Reset a
NO. Regrese al modo automático y confirme. Para obtener más
información, consulte el Manual de referencia técnica Parámetros del sistema.
20410, Ahorro de energía restablecido
Descripción
El ahorro de energía se ha restablecido.
Antes del restablecimiento, el sistema se encontraba en el
modo de Ahorro de energía: arg.
20404, Valores de depuración en el modo
automático
Consecuencias
El sistema ya no se encuentra en el modo de Ahorro de energía.
Causas probables
Descripción
El sistema ha sido reiniciado, de forma intencionada o a causa
RAPID Spy está activo.
de una caída de alimentación.
Consecuencias
RAPID Spy no se desactivará.
20411, Ahorro de energía activado
El sistema no estará en el modo de plena producción en
Descripción
automático.
El sistema de robot ha entrado en un estado de ahorro de
Acciones recomendadas
energía.
Para el modo de plena producción: Regrese al modo
automático. Cambie el parámetro de sistema Controller / Auto
Condition Reset / AllDebugSettings / Reset a Yes. Regrese al
Consecuencias
El sistema de robot no podrá realizar ninguna tarea normal.
modo automático y confirme. Para obtener más información,
consulte el Manual de referencia técnica - Parámetros del
sistema.
Continúa en la página siguiente
152
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20412, Ahorro de energía desactivado
Acciones recomendadas
Asegúrese de que el botón de paro de emergencia se haya
Descripción
El sistema de robot ha reanudado el funcionamiento desde un
estado de ahorro de energía.
liberado y que el paro de emergencia se haya restablecido
(pulsando el botón Motors ON o mediante la acción de System
Input 'Reset Emergency Stop').
Consecuencias
El sistema de robot podrá realizar ahora las tareas normales.
20416, Ahorro de energía bloqueado
20413, Fallo de Motors ON
Descripción
Se ha impedido que el sistema de robot entre en un estado de
Descripción
ahorro de energía.
Fallo de Motors ON cuando el controlador se estaba
reanudando desde un estado de ahorro de energía.
Consecuencias
Consecuencias
El sistema de robot no podrá entrar en un estado de ahorro de
energía hasta haber sido desbloqueado.
El sistema se reanudará desde el estado de ahorro de energía,
pero permanecerá en Motors Off/Paro protegido.
Causas probables
20417, Ahorro de energía desbloqueado
Descripción
El controlador: Ya no se encuentra en el modo automático. Se
El sistema de robot ha salido del estado bloqueado.
encuentra en estado de fallo de sistema. Se encuentra en
Consecuencias
estado de paro de emergencia.
El sistema de robot ahora podrá entrar en un estado de ahorro
20414, Fallo de inicio de programa
de energía.
Descripción
20418, Ahorro de energía ya activo
Fallo de inicio de ejecución de programa cuando el controlador
se estaba reanudando desde un estado de ahorro de energía.
Descripción
El sistema de robot ya ha entrado en un estado de ahorro de
Consecuencias
energía. No se admite el cambio entre modos de ahorro de
El sistema se reanudará desde el estado de ahorro de energía,
pero permanecerá en el estado parado.
Causas probables
energía. Para entrar en un modo de ahorro de energía diferente,
el sistema de robot debe reanudarse en primer lugar.
Consecuencias
El controlador: Ya no se encuentra en el modo automático. Se
encuentra en estado de fallo de sistema. Se encuentra en
El sistema de robot permanecerá en el modo de ahorro en el
que entró previamente.
estado de paro de emergencia.
Causas probables
20415, Fallo de Motors ON/inicio de programa
El sistema de robot ya ha entrado en un estado de ahorro de
energía.
Descripción
Fallo de Motors ON y/o de inicio de ejecución de programa
cuando el controlador se estaba reanudando desde un estado
de ahorro de energía.
Consecuencias
Acciones recomendadas
Para entrar en un modo de ahorro de energía diferente, el
sistema de robot debe reanudarse en primer lugar.
20425, Acceso de escritura rechazado
El sistema se reanudará desde el estado de ahorro de energía,
Descripción
pero permanecerá en Motors Off.
La solicitud de acceso de escritura a través de las E/S del
Causas probables
sistema fue rechazada.
El sistema se encuentra en estado de paro de emergencia.
Consecuencias
No se permitió el acceso de escritura.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
153
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
Causas probables
El motivo podría ser que otro cliente ya dispone de acceso de
escritura o que el sistema no está en modo automático.
20443, Múltiples reinicios de actualización de
firmware
Descripción
Acciones recomendadas
Se ha ordenado un nuevo reinicio al modo de actualización de
Asegúrese de que ningún otro cliente, por ejemplo RobotStudio,
firmware tras dos reinicios de actualización consecutivos.
disponga de acceso de escritura y que el sistema se encuentre
en modo automático.
Consecuencias
No se ha realizado ningún reinicio más al modo de actualización
20426, Acceso de escritura rechazado
de firmware.
Causas probables
Descripción
Lo más probable es que la actualización del firmware de una
La solicitud de acceso de escritura a través de las E/S del
sistema fue rechazada.
tarjeta de hardware haya fallado. Es posible que el firmware o
el hardware de la tarjeta estén dañados.
Se debe a que el acceso de escritura está retenido por arg con
Acciones recomendadas
arg.
Consulte el registro de eventos para ver los mensajes de error
20440, Imposible inicializar el marco de trabajo
de actualización del FW
anteriores.
20444, La tarjeta SD ha sido retirada
Descripción
No fue posible inicializar el marco de trabajo de actualización
del firmware de las tarjetas de hardware.
Descripción
La tarjeta SD ha sido retirada.
Consecuencias
Consecuencias
No se realizará ninguna actualización del firmware de las
El sistema entrará en el estado de fallo del sistema.
Causas probables
tarjetas de hardware.
La tarjeta SD ha sido retirada o existe un defecto en el contacto
Causas probables
La instalación del controlador contiene un archivo XML no
entre la tarjeta SD o el conector.
Acciones recomendadas
válido: arg.
Realice un reinicio de la forma detallada en el Manual del
Acciones recomendadas
Para desarrolladores: Corrija el archivo. Utilice el esquema
hw_compatibility.xsd para verificarlo. Para otros usuarios:
Reinstale el sistema.
operador del IRC5.
20445, El adaptador de USB a serie fue retirado
Descripción
20441, Imposible inicializar el módulo de
actualización del firmware
El adaptador de USB a serie fue retirado.
Descripción
El adaptador de USB a serie no está accesible.
Imposible inicializar el patch de FW de las tarjetas de hardware.
Causas probables
Consecuencias
El adaptador de USB a serie fue retirado o existe un defecto
No se aplicará ninguna actualización de firmware a las tarjetas
en el contacto entre el adaptador de USB a serie o el conector.
de hardware.
Acciones recomendadas
Causas probables
Realice un reinicio de la forma detallada en el Manual del
El archivo del módulo de actualización del firmware no es
operador del IRC5.
Consecuencias
válido: arg.
Acciones recomendadas
Corrija el archivo del módulo de actualización. Utilice el
esquema hw_compatibility.xsd para verificarlo.
Continúa en la página siguiente
154
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20446, Imposible acceder al directorio HOME
20453, Pos. sincron. incorr. en SC arg
Descripción
Descripción
El sistema no pudo acceder al directorio HOME durante la
Las posiciones de las unidades mecánicas supervisadas no
puesta en marcha.
coinciden con las posiciones de sincronización definidas en la
El sistema ha intentado crear un nuevo directorio HOME para
configuración de seguridad para el controlador Safety Controller
recuperarse.
(SC) arg en el eje arg.
Consecuencias
Acciones recomendadas
El sistema ha entrado en el estado de fallo del sistema.
Compruebe que todas las unidades mecánicas supervisadas
Si se ha creado un nuevo directorio HOME: arg estará vacío.
estén posicionadas en la posición de sincronización
configurada. Compruebe que el modificador de sincronización
Causas probables
El directorio HOME no se encuentra o fue renombrado antes
funcione correctamente. Compruebe que la calibración de los
motores y los cuentarrevoluciones están actualizados y sean
del reinicio del sistema.
correctos. Compruebe que la posición de sincronización en la
Acciones recomendadas
configuración de seguridad sea correcta. Compruebe la
Compruebe el contenido del directorio HOME para detectar
posibles archivos o carpetas ausentes. Copie el contenido del
directorio HOME desde una copia de seguridad y reinicie el
sistema, o bien realice una restauración desde una copia de
seguridad para la recuperación.
existencia de un error de configuración. Descargue los valores
de calibración de los motores. Compruebe si los ejes 4 ó 6
están configurados como independientes. En caso afirmativo,
compruebe que la configuración de EPS esté configurada del
mismo modo.
20450, Velocidad de CBC de SC arg excedida
Descripción
20454, Límite de Servo-Lag del SC arg rebasado
Descripción
Se ha rebasado el límite de velocidad de la función Cyclic Brake
Check (CBC) del controlador Safety Controller (SC) de la unidad
mecánica arg. El intervalo de prueba de CBC ha caducado o
El controlador Safety Controller (SC) arg ha detectado una
diferencia excesiva entre la posición ordenada y real en la
unidad mecánica arg y el eje arg.
ha fallado una prueba de frenos anterior.
Acciones recomendadas
Acciones recomendadas
Compruebe si hay colisiones. Si utiliza ejes externos,
Reduzca la velocidad y ejecute la comprobación de los frenos.
20451, SC arg no sincronizado
compruebe la configuración del retardo servo en la
configuración de seguridad. Si utiliza el servo suave, compruebe
que la tolerancia del rango de seguridad operativa (OSR) de la
Descripción
configuración de seguridad no sea demasiado baja. Compruebe
El controlador Safety Controller (SC) arg no está sincronizado
que los cuentarrevoluciones estén actualizados. Compruebe
con las unidades mecánicas supervisadas.
si existen problemas de comunicación con el ordenador
principal, el ordenador de ejes o la tarjeta de medida serie.
Acciones recomendadas
Mueva todas las unidades mecánicas supervisadas por el
controlador Safety Controller arg hasta las posiciones de
sincronización definidas en la configuración de seguridad.
20452, SC arg sincronizado
Compruebe si el peso de la herramienta está definido
correctamente.
20455, Valor pos. incorrecto en SC arg
Descripción
Valor de posición incorrecto en la tarjeta Serial Measurement
Descripción
El controlador Safety Controller (SC) arg está ahora
sincronizado con las unidades mecánicas supervisadas. La
supervisión de seguridad está disponible.
Board detectado por el controlador Safety Controller (SC) arg
de la unidad mecánica arg.
Acciones recomendadas
Compruebe el resolver y sus conexiones. Sustituya la tarjeta
Serial Measurement Board. Sustituya el resolver.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
155
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20456, T. límite agotado en refs. SC arg
Acciones recomendadas
Compruebe el cableado del Safety Controller. Compruebe el
Descripción
El controlador de robot ha dejado de enviar datos de referencia
al controlador Safety Controller (SC) arg.
Acciones recomendadas
estado del Safety Controller. Reinicie el controlador del robot
tras realizar las acciones recomendadas.
20460, Conf. seguridad de SC arg no encontrada
Compruebe los registros de errores anteriores para determinar
las posibles causas. Reinicie el sistema.
Descripción
Imposible recuperar la configuración de seguridad del Safety
20457, Configuración de seguridad cambiada
para el SC arg
Controller (SC) arg.
Acciones recomendadas
Reinicie el controlador del robot. Descargue una configuración
Descripción
La configuración de seguridad del Safety Controller (SC) arg
ha cambiado de contenido o no se corresponde con el hardware
utilizado.
de seguridad del SC. Reinstale el sistema.
20461, Conf. de robot de SC arg no encontrada
Descripción
Causas probables
Se ha descargado una nueva configuración de seguridad, el
caso normal. La configuración no se corresponde con el
Imposible recuperar la configuración de robot del Safety
Controller (SC) arg.
hardware utilizado. Esto suele ocurrir cuando se repite un elog
Acciones recomendadas
con una nueva solicitud de código PIN. Configuración de
Reinicie el controlador del robot. Reinstale el sistema.
seguridad dañada. Esto suele ocurrir cuando se repite un elog
con una nueva solicitud de código PIN.
20462, Offset calibr. del SC arg no encontrado
Acciones recomendadas
Descripción
Busque nuevos mensajes del registro de errores que indiquen
Imposible recuperar los offset de calibración de motores del
si se ha descargado una nueva configuración de seguridad. Si
controlador Safety Controller (SC) arg .
no se ha descargado ninguna nueva configuración de seguridad
y este registro de errores aparece después de un reinicio,
descargue una nueva configuración de seguridad al Safety
Controller. Cree y descargue una nueva configuración de
seguridad si este elog llega después de cada reinicio y se
produce una nueva solicitud de nuevo código PIN.
Acciones recomendadas
Descargue nuevos offsets de calibración al SC.
20463, Conf. seguridad del SC arg descargada
Descripción
La descarga de la configuración de seguridad se realizó
20458, Fallo interno del SC arg
Descripción
Fallo interno en el controlador Safety Controller (SC) arg.
correctamente para el controlador Safety Controller (SC) arg.
20464, Límite de OSR del SC arg sobrepasado
Descripción
Acciones recomendadas
Compruebe el cableado del controlador Safety Controller.
Compruebe el estado del controlador Safety Controller
observando el LED. Sustituya el controlador Safety Controller
El controlador Safety Controller (SC) arg ha detectado una
diferencia excesiva entre la posición ordenada y real dentro
del rango de seguridad operativa (OSR) de la unidad mecánica
arg y el eje arg.
si el error no desaparece.
Acciones recomendadas
20459, Fallo de E/S del SC arg
Compruebe si existe una colisión. Compruebe que la tolerancia
de Operational Safety Range (OSR) en la configuración de
Descripción
Error de E/S en el Safety Controller (SC) arg.
seguridad no tenga un valor demasiado bajo. Sincronice el
controlador Safety Controller si los cuentarrevoluciones han
sido actualizados desde la última sincronización.
Continúa en la página siguiente
156
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20465, Velocid. SAS SC arg excesiva
Posición incorrecta de punto de herramienta 6. Posición
incorrecta de punto de herramienta 7. Posición incorrecta de
Descripción
Vulneración de Safe Axis Speed (SAS) en la unidad mecánica
arg y el eje arg del controlador Safety Controller (SC).
punto de herramienta 8.
Acciones recomendadas
Reduzca la velocidad. Sitúe la herramienta del robot en la
Acciones recomendadas
posición segura. Ajuste la orientación de la herramienta.
Reduzca la velocidad del eje arg.
20466, Fallo de E/S del SC arg
20469, Vulneración de SAR en el SC arg
Descripción
Descripción
Error de E/S en el Safety Controller (SC) arg, E/S arg, tipo arg.
Tipo 1: Entrada.
Se ha vulnerado la función Safe Axis Range (SAR) arg en la
unidad mecánica arg y el eje arg.
Acciones recomendadas
Tipo 2: Salida.
Mueva la unidad mecánica hasta una posición segura
Causas probables
Conexión incorrecta a los terminales de E/S del SC. Error de
coincidencia en E/S de dos canales.
20470, Preaviso de sincronización del SC arg
Descripción
Acciones recomendadas
Compruebe el cableado del SC. Compruebe el estado del SC.
Reinicie el controlador del robot tras realizar las acciones
Se requiere la sincronización para las unidades mecánicas
supervisadas por el controlador Safety Controller (SC) arg en
menos de arg hora(s).
recomendadas.
Acciones recomendadas
20467, Velocid. STS SC arg excesiva
Descripción
Velocidad reducida de Safe Tool Speed (STS) en el controlador
Realice la sincronización antes de que finalice el tiempo límite.
20471, T. límite de sincronización del SC arg
Safety Controller (SC) de la unidad mecánica arg demasiado
Descripción
alta. Causa arg.
Se ha agotado el límite de tiempo de sincronización para el
controlador Safety Controller (SC) arg.
Causas probables
Velocidad de tool0. Velocidad de codo. Velocidad de
Acciones recomendadas
herramienta. Velocidad de eje adicional.
Realice la sincronización.
Acciones recomendadas
Reduzca la velocidad de la herramienta.
20472, Nueva config. seguridad en SC arg
Descripción
20468, Vulneración de STZ en el SC arg
El controlador Safety Controller (SC) arg ha recibido una nueva
configuración de seguridad. Se requiere un nuevo código PIN
Descripción
Se ha vulnerado la función Safe Tool Zone (STZ) arg en la
para la activación.
unidad mecánica arg.
Acciones recomendadas
La herramienta arg estaba activa.
Inicie una sesión como un usuario con derechos de
Causa arg.
configuración de seguridad. Introduzca un nuevo código PIN
para el controlador Safety Controller en el Panel de control.
Causas probables
Velocidad excedida. Posición incorrecta de herramienta.
Orientación incorrecta de herramienta. Posición incorrecta de
20473, Doble ordenador no coinc. en SC arg
codo. Posición incorrecta de punto de herramienta 1. Posición
Descripción
incorrecta de punto de herramienta 2. Posición incorrecta de
El controlador Safety Controller (SC) arg ha tenido durante
punto de herramienta 3. Posición incorrecta de punto de
demasiado tiempo conflictos de valores para una salida de
herramienta 4. Posición incorrecta de punto de herramienta 5.
seguridad.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
157
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
Consecuencias
Consecuencias
El controlador Safety Controller ha pasado a un estado seguro
Toda la supervisión de seguridad ha sido desactivada en el
y genera un error tras 10 minutos con problemas de
controlador Safety Controller. Posibles riesgos para la
coincidencia interna si no se realizan las acciones
seguridad.
recomendadas.
Acciones recomendadas
Causas probables
Descargue una configuración de seguridad del controlador
La unidad mecánica ha permanecido estacionada durante
Safety Controller.
demasiado tiempo en una posición que se encuentra en, o
cerca de, un límite de función supervisado o monitorizado. Error
de computación interno en el controlador Safety Controller.
20477, Fallo de comunic. de SMB con el SC arg
Descripción
Acciones recomendadas
El controlador Safety Controller (SC) arg no pudo comunicarse
Mueva los ejes de todas las unidades mecánicas y las
con la tarjeta Serial Measurement Board (SMB).
herramientas hasta situarlas bien dentro o bien fuera de los
límites de función monitorizados y supervisados.
20474, Fallo de aliment. E/S de SC arg
Acciones recomendadas
Asegúrese de que los cables que unen la tarjeta Serial
Measurement Board al controlador Safety Controller estén
conectados al conector correcto de la tarjeta Serial
Descripción
Measurement Board y funcionen correctamente. Reinicie el
El nivel de tensión de la alimentación de E/S del controlador
sistema.
Safety Controller (SC) arg está fuera de rango.
Causas probables
20478, Fallo de alim. principal SC arg
O bien la tensión no cumple los límites o no hay tensión.
Descripción
Acciones recomendadas
La tensión de la fuente de alimentación principal del Safety
Conecte una fuente de alimentación de 24 V con el nivel
Controller (SC) arg está fuera de rango.
correcto de tensión a los terminales de alimentación de E/S.
Causas probables
Reinicie el controlador de robot.
O bien la tensión no cumple los límites o no hay tensión.
20475, Sincronización rechazada para el SC arg
Acciones recomendadas
Compruebe el cableado del Safety Controller. Compruebe la
Descripción
tensión de la fuente de alimentación. Reinicie el controlador
El controlador Safety Controller (SC) arg no está configurado
de robot.
correctamente para la sincronización.
Causas probables
20479, Falta un eje adicional en el SC arg
El PIN de la configuración de seguridad no está definido o es
Descripción
incorrecto. La configuración de seguridad está vacía. La
Un eje adicional supervisado por el controlador Safety
configuración de seguridad está dañada o no se encuentra.
Controller (SC) arg ya no está presente en la configuración del
Controlador Safety Controller conectado a un bus de SMB
sistema.
incorrecto. Falta la alimentación de E/S.
Acciones recomendadas
Acciones recomendadas
Reinstale el eje adicional supervisado o descargue una
Verifique y compruebe las posibles causas.
configuración de seguridad sin la supervisión del eje adicional.
20476, SC arg desactivado
20480, Vulneración de SST en el SC arg
Descripción
Descripción
El controlador Safety Controller (SC) arg está desactivado.
La función Safe Stand Still (SST) arg del Safety Controller (SC)
ha sido vulnerada en la unidad mecánica arg y el eje arg.
Continúa en la página siguiente
158
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20485, Par de frenado insuficiente en el SC arg
Acciones recomendadas
Verifique el programa de RAPID. Verifique los equipos de
proceso. Compruebe que el movimiento no continúe mientras
la función SST está activada. Compruebe los mensajes
anteriores del registro elog.
Descripción
El par de frenado del controlador Safety Controller (SC) de la
unidad mecánica arg y el eje arg es demasiado bajo.
Causas probables
El eje no ha sido probado. Uno o varios frenos desgastados.
20481, OVR de SC arg activa
Acciones recomendadas
Descripción
Operación de ajuste (OVR) activa en el controlador Safety
Compruebe si el eje que falla está activado. Si el eje que falla
está activado, sustituya los frenos lo antes posible.
Controller (SC) arg.
SafeMove detendrá el robot tras aproximadamente 20 minutos
con la OVR activa.
20486, CBC de SC arg interrumpido o incorrecto
La velocidad está limitada a 250 mm/s ó 18 grados/s.
Descripción
Acciones recomendadas
El controlador Safety Controller (SC) ha detectado que la última
Desactive la señal conectada a la entrada OVR.
ejecución de Cyclic Brake Check (CBC) en la unidad mecánica
arg fue interrumpida o generó un resultado incorrecto.
20482, Tiempo límite de OVR en SC arg
Acciones recomendadas
Compruebe los mensajes de elog anteriores. Realice una nueva
Descripción
La operación de redefinición (OVR) ha estado activa demasiado
tiempo en el Safety Controller (SC) arg.
Acciones recomendadas
Reinicie el controlador de robot. Cambie el estado de la señal
prueba de frenos sólo en caso necesario, típicamente si también
se ha mostrado el elog 20485.
20487, Velocid. no sincronizada excesiva en SC
arg
conectada a la entrada OVR. Active la confirmación del paro
pulsando el pulsador Motors ON. Devuelva el robot al área de
Descripción
trabajo. Desactive la señal conectada a la entrada OVR
Velocidad de eje excesiva cuando el controlador Safety
Controller (SC) arg no estaba sincronizado.
20483, CBC pronto necesaria en el SC arg
Acciones recomendadas
Mueva la unidad mecánica hasta la posición de sincronización
Descripción
La función Cyclic Brake Check (CBC) será necesaria en menos
con una velocidad de eje reducida. Reduzca la velocidad a 250
mm/s ó 18 grados/s.
de arg horas.
Acciones recomendadas
Realice una comprobación de frenos antes de que finalice el
20488, T. límite sin sincronización agotado en
SC arg
tiempo límite.
Descripción
20484, Es necesario realizar un CBC en el SC arg
El tiempo disponible para mover el robot mientras no está
sincronizado se ha agotado en el controlador Safety Controller
Descripción
(SC) arg.
Tiempo límite de Cyclic Brake Check (CBC) agotado en el
controlador Safety Controller (SC), o falló la última
Acciones recomendadas
Realice una configuración de paro pulsando el pulsador Motores
comprobación de frenos.
ON o active la entrada del sistema. Sincronice el SC arg.
Acciones recomendadas
Realice una comprobación de frenos.
20489, SC arg desactivado
Descripción
El Safety Controller (SC) arg ha sido desactivado y no hay
ninguna función de supervisión activa.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
159
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
Causas probables
frenado. Si esto ocurre frecuentemente, consulte el Manual de
O bien se ha realizado un restablecimiento del sistema o se
Aplicaciones para la configuración de unidades mecánicas.
trata de la primera puesta en marcha del SC.
Acciones recomendadas
Descargue una configuración al SC arg.
20494, Cambio incorrecto de herramienta en SC
arg
Descripción
20490, Velocid. OVR SC arg excesiva
Cambio incorrecto de herramienta con la herramienta arg en
la unidad mecánica arg.
Descripción
Se ha rebasado el límite de velocidad de ajuste (OVR) en la
Acciones recomendadas
unidad mecánica arg.
Compruebe si es una herramienta correcta. Reduzca la
velocidad en caso necesario. Realice un nuevo cambio de
Causas probables
Si el ajuste (OVR) está activo, las limitaciones de velocidad de
herramienta.
OVR estarán activas.
20501, Paro de emergencia de panel abierto
Acciones recomendadas
Reduzca la velocidad. Desactive OVR.
Descripción
El panel de paro de emergencia ha sido interrumpido
20491, Ajuste de SC arg activo durante el inicio
anteriormente y, mientras estaba interrumpido, se ha intentado
utilizar el robot.
Descripción
La entrada digital de ajuste estaba activa durante el inicio del
Consecuencias
El sistema permanece en el estado de paro de emergencia.
SC arg.
Causas probables
20492, Vulneración de SST del SC arg en la
prueba de frenos
Se ha intentado manipular un control, por ejemplo el dispositivo
Descripción
Acciones recomendadas
Se detectó movimiento durante la prueba de los frenos en el
Para reanudar el funcionamiento, restablezca en primer lugar
controlador Safety Controller (SC) arg, unidad mecánica arg y
el botón de paro de emergencia del panel. A continuación,
eje arg.
devuelva el sistema al estado Motores ON presionando el botón
de habilitación.
Motores ON del módulo de control.
Causas probables
Prueba de frenos interrumpida. Frenos desgastados.
Acciones recomendadas
20502, Paro de emergencia de unidad de
programación abierto
Reinicie el CBC. Sustituya el freno.
Descripción
20493, Función SBR disparada en el SC arg
El paro de emergencia de la unidad de programación ha sido
interrumpido anteriormente y, mientras estaba interrumpido,
Descripción
se ha intentado utilizar el robot.
La función Safe Brake Ramp (SBR) del controlador Safety
Controller (SC) fue interrumpida por un paro de clase 0 debido
a una deceleración demasiado lenta en la unidad mecánica
Consecuencias
El sistema permanece en el estado de paro de emergencia.
arg. Se trata de una situación normal y se produce cuando el
Causas probables
paro 1 resulta demasiado lento. Compruebe el registro elog de
Se ha intentado manipular un control, por ejemplo el dispositivo
los demás controladores de seguridad.
de habilitación.
Acciones recomendadas
Acciones recomendadas
Cambie el valor del parámetro de SBR en la configuración de
Para reanudar el funcionamiento, restablezca en primer lugar
movimiento. Dispare un nuevo paro para probar la rampa de
el botón de paro de emergencia de la unidad de programación.
Continúa en la página siguiente
160
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
A continuación, devuelva el sistema al estado Motores ON
presionando el botón Motores ON del módulo de control.
20503, Paro de emergencia de ext.cat.0 abierto
Descripción
20507, Cadena de hardware abierta
Descripción
Los relés (KA16 y KA17) de la tarjeta Safety Interface Board
(SIB) no están activados.
Consecuencias
El paro de emergencia externo ha sido interrumpido
Comando Motores ON rechazado.
anteriormente y, mientras estaba interrumpido, se ha intentado
Acciones recomendadas
utilizar el robot.
Pulse el botón Motores ON para cerrar la cadena.
Consecuencias
El sistema permanece en el estado de paro de emergencia.
Causas probables
Se ha intentado manipular un control, por ejemplo el dispositivo
de habilitación.
20521, Conflicto de paro de prueba
Descripción
Conflicto de estado en la cadena de paro de prueba.
Consecuencias
Acciones recomendadas
Para reanudar el funcionamiento, restablezca en primer lugar
El sistema pasa al estado SYS HALT.
el botón de paro de emergencia externo. A continuación,
Acciones recomendadas
devuelva el sistema al estado Motores ON presionando el botón
Compruebe la protección de seguridad de dos canales que ha
Motores ON del módulo de control.
causado el conflicto de estado.
20505, Paro retardado abierto
20525, Conflicto de paro de emergencia de panel
Descripción
Descripción
Paro retardado abierto.
Conflicto de estado en la cadena de panel de paro de
emergencia.
Consecuencias
El sistema pasa al estado SYS HALT.
Consecuencias
El sistema pasa al estado de paro de emergencia.
Acciones recomendadas
Para reanudar el funcionamiento, rearme en primer lugar el
Acciones recomendadas
botón de paro retardado. A continuación, devuelva el sistema
Compruebe la protección de seguridad de dos canales que ha
al estado Motors ON presionando el botón Motors ON del
causado el conflicto de estado.
módulo de control.
20506, Paro de prueba abierto
20526, Conflicto de paro de emergencia de
unidad de programación
Descripción
Descripción
El circuito de paro de prueba se ha interrumpido.
Conflicto de estado en la cadena de unidad de programación
de paro de emergencia.
Consecuencias
El sistema pasa al estado SYS HALT.
Consecuencias
El sistema pasa al estado de paro de emergencia.
Causas probables
Uno o varios de los interruptores conectados en serie con el
Acciones recomendadas
circuito de paro de prueba se han abierto, algo que puede
Compruebe la protección de seguridad de dos canales que ha
deberse a un gran número de fallos. Esto es sólo posible
causado el conflicto de estado.
durante el modo de funcionamiento manual.
Acciones recomendadas
Busque el interruptor, restablézcalo o reinicie el sistema.
Compruebe los cables y las conexiones.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
161
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20527, Conflicto de paro de emergencia de
ext.cat.0
Consecuencias
Descripción
Acciones recomendadas
Conflicto de estado en la cadena ext.cat.0 de paro de
Compruebe los cables y las conexiones.
El sistema pasa al estado SYS HALT.
emergencia.
20535, Conflicto de interbloqueo AUX
Consecuencias
El sistema pasa al estado de paro de emergencia.
Descripción
Sólo una de las dos cadenas de interbloqueo AUX estaba
Acciones recomendadas
Compruebe la protección de seguridad de dos canales que ha
abierta. Se utiliza normalmente con el interbloqueo de puerta
CBS.
causado el conflicto de estado.
Consecuencias
20528, Conflicto de entrada de interbloqueo de
alta tensión
La cadena de habilitación de pintura se abre.
Descripción
Compruebe los cables y las conexiones.
Acciones recomendadas
Sólo una de las dos señales de entrada de las cadenas de alta
tensión está abierta.
20536, Conflicto de cadena de Motors ON
Consecuencias
Descripción
La cadena de habilitación de pintura se abre.
Sólo una de las dos señales de cadena Motors ON de la cadena
de ejecución está abierta.
Acciones recomendadas
Compruebe la protección de seguridad de dos canales que ha
Consecuencias
causado el conflicto de estado.
El sistema pasa al estado SYS HALT.
Acciones recomendadas
20529, Conflicto de entrada de interbloqueo de
cabina
Compruebe los cables y las conexiones.
Descripción
20550, Fallo de prueba de perturbación
Sólo una de las dos señales de entrada de las cadenas de
interbloqueo de cabina está abierta.
Descripción
Estado activo cuando el firmware de la tarjeta de interfaz de
Consecuencias
proceso (PIB) no detecta ningún impulso de prueba de
La cadena de habilitación de pintura se abre.
perturbación durante 30 segundos.
Acciones recomendadas
Consecuencias
Compruebe los cables y las conexiones.
El sistema pasa al estado SYS HALT.
Acciones recomendadas
20531, Conflicto de paro retardado
Compruebe los demás mensajes de error para determinar la
Descripción
causa principal del fallo. Busque problemas de comunicación
Conflicto de estado en el circuito de paro retardado.
entre la PIB y el ordenador principal (MC).
Consecuencias
El sistema pasa al estado SYS HALT.
20556, Enable2 de AXC 2 abierto
Descripción
Acciones recomendadas
Compruebe los cables y las conexiones.
Estado activo cuando la señal de habilitación del ordenador de
ejes 1 está abierta.
20534, Conflicto de selector de modo
Consecuencias
El sistema pasa al estado SYS HALT.
Descripción
Alguna de las conexiones del selector de modo está defectuosa.
Continúa en la página siguiente
162
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20560, Límite de ejes en MCOB
Acciones recomendadas
Compruebe los demás mensajes de error para determinar la
causa principal del fallo. Si no hay ningún otro mensaje de
error, compruebe la tensión de la línea para detectar la posible
ausencia de una fase.
Descripción
Estado activo cuando un sensor de límite de la tarjeta
Manipulator Controller Board (MCOB) arg está activado.
Consecuencias
20557, Enable2 de AXC 2 abierto
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Descripción
Estado activo cuando la señal de habilitación del ordenador de
Compruebe los sensores de límite que estén conectados a la
tarjeta MCOB.
ejes 2 está abierta.
Consecuencias
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Compruebe los demás mensajes de error para determinar la
causa principal del fallo. Si no hay ningún otro mensaje de
error, compruebe la tensión de la línea para detectar la posible
ausencia de una fase.
20561, El software del manipulador ha abierto la
cadena de habilitación
Descripción
Estado activo cuando el software de la tarjeta Manipulator
Controller Board (MCOB/MCB) arg ha abierto la cadena de
habilitación.
Consecuencias
20558, Avería en el manipulador
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Descripción
Se ha perdido el estado activo cuando no hay ningún
manipulador arg conectado a la tarjeta Manipulator Interface
Board (MIB) arg, o bien las condiciones de la cadena de
habilitación del manipulador no se cumplen.
Compruebe los demás mensajes de error para determinar la
causa principal del fallo. Compruebe si existe un fallo de frenos.
20562, Fallo de restablecimiento de paro de
emergencia
Consecuencias
El sistema pasa al estado SYS HALT.
Descripción
Estado activo cuando la entrada 'Reset Emergency Stop' está
Acciones recomendadas
Compruebe la alimentación del manipulador. Compruebe que
activada durante más de 3 segundos.
la cadena de habilitación de la tarjeta Manipulator Controller
Consecuencias
Board (MCOB/MCB) se encuentre en buen estado. Compruebe
El sistema pasa al estado SYS HALT.
si existe sobretemperatura en los motores del manipulador.
Acciones recomendadas
Compruebe las señales del manipulador a través de la Power
Compruebe la conexión del restablecimiento externo del paro
Distribution Board (PDB). Consulte el diagrama de circuitos.
de emergencia. Compruebe el pulsador Motores ON.
20559, Sensor de colisión activo
20563, Desconexión de servo abierta
Descripción
Descripción
Estado activo cuando un sensor de colisión digital de la tarjeta
El estado está activo cuando el interruptor de desconexión de
Manipulator Controller Board (MCOB) arg está activado.
servo del sistema arg está apagado.
Consecuencias
Consecuencias
El sistema pasa al estado SYS HALT.
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Acciones recomendadas
Compruebe los sensores de colisión que estén conectados a
Si el interruptor de desconexión de servo no está instalado,
la tarjeta MCOB.
compruebe el enlace de desactivación de la tarjeta Manipulator
Interface Board (MIB).
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
163
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20564, Liber. de frenos en ejes 1 y 7
Descripción
20568, Habilitación de hardware abierta en la
tarjeta MCOB/MCB
Estado activo cuando la liberación manual de los frenos de los
Descripción
ejes 1 a 7 estaba activado.
Estado activo cuando el firmware de la tarjeta Manipulator
Controller Board (MCOB/MCB) arg ha abierto la cadena de
Consecuencias
El sistema pasa al estado SYS HALT.
habilitación.
Consecuencias
Acciones recomendadas
Compruebe el interruptor de liberación manual de los frenos
El sistema pasa al estado SYS HALT.
de los ejes 1 y 7.
20565, Habilitación externa 1 abierta
20569, Fallo de dispositivo de vigilancia de la
tarjeta MCOB/MCB
Descripción
Descripción
Estado activo cuando la habilitación externa 1 de la tarjeta
Manipulator Controller Board (MCOB) arg está abierta.
Estado activo cuando un dispositivo de vigilancia de la tarjeta
Manipulator Controller Board (MCOB/MCB) arg falla.
Consecuencias
Consecuencias
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Compruebe las conexiones de la tarjeta MCCB X25.
El sistema pasa al estado SYS HALT.
20570, Error de cableado del FlexPendant
Descripción
20566, Habilitación externa 2 abierta
Estado activo mientras la tarjeta de interfaz de proceso (PIB)
detecta un fallo en el paro de emergencia de la unidad de
Descripción
programación y las señales de habilitación de dispositivos
Estado activo cuando la habilitación externa 2 de la tarjeta
(prueba de cortes momentáneos).
Manipulator Controller Board (MCOB) arg está abierta.
Consecuencias
Consecuencias
El sistema pasa al estado SYS HALT.
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Acciones recomendadas
Compruebe los cables y las conexiones del FlexPendant.
Compruebe las conexiones de la tarjeta MCCB X43.
20567, Alimentación insuficiente en la tarjeta
MCOB
Descripción
Compruebe la tarjeta de interfaz del FlexPendant (TIB) y la
tarjeta Manipulator Interface Board (MIB).
20571, Interbloqueo de alta tensión abierto
Descripción
Estado activo cuando la alimentación tenía menos de 16 V en
la tarjeta Manipulator Controller Board (MCOB) arg.
Consecuencias
El interbloqueo de alta tensión (HV) del sistema de pintura está
abierto por una conexión de interbloqueo externa.
Consecuencias
El sistema pasa al estado SYS HALT.
Acciones recomendadas
La cadena de habilitación de pintura se abre.
Acciones recomendadas
Compruebe la alimentación en la tarjeta MCOB.
Compruebe el interruptor manual de desconexión del sistema
de alta tensión (HV).
Continúa en la página siguiente
164
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20572, Interbloqueo de cabina abierto
Acciones recomendadas
Compruebe los cables y equipos conectados a las entradas
Descripción
El interbloqueo de cabina está abierto por una conexión de
interbloqueo externa.
AUX.
20576, Interbloqueo de sistema 2 abierto
Consecuencias
La cadena de habilitación de pintura se abre.
Descripción
El interbloqueo de sistema 2 está abierto. Se utiliza
Acciones recomendadas
normalmente para Cartridge Bell System (CBS) o para bombas
Compruebe la ventilación de la cabina y otras funciones de
de pintura.
seguridad.
Consecuencias
20573, Falta la ID de controlador
La cadena de habilitación de pintura se abre.
Acciones recomendadas
Descripción
La ID de controlador es la identificación exclusiva del
controlador. De forma predeterminada, es igual al número de
serie del armario del controlador. La configuración de software
del controlador no contiene esta información de identidad.
Compruebe los cables y equipos conectados al sistema 2.
20577, Interbloqueo de encendido de alta tensión
Descripción
El interruptor de alta tensión (HV) del panel del operador está
Causas probables
Esto puede ocurrir al sustituir o reformatear los soportes de
datos de almacenamiento del controlador.
abierto.
Consecuencias
La cadena de habilitación de pintura se abre.
Acciones recomendadas
Lea el número de serie del controlador que encontrará en el
Acciones recomendadas
armario del controlador para determinar cuál es la ID de
Confirme el cambio a Motores ON y encienda la llave de alta
controlador correcta. Utilice las herramientas de RobotStudio
tensión para cerrar la cadena de interbloqueo de alta tensión.
para definir este valor en el controlador.
20574, Interbloqueo de proceso abierto
20581, La comunicación de SPI hacia la tarjeta
SIB está desactivada
Descripción
Descripción
El interbloqueo de proceso está abierto por una conexión de
Estado activo cuando la prueba cíclica de habilitación 1 falla
interbloqueo externa.
con la tarjeta Safety Interface Board (SIB).
Consecuencias
Consecuencias
La cadena de habilitación de pintura se abre.
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Acciones recomendadas
Compruebe el interruptor manual de desconexión del sistema
Compruebe el estado en la interfaz de periféricos serie (SPI).
de proceso.
Compruebe los cables que unen la tarjeta de interfaz de proceso
(PIB) y la tarjeta SIB.
20575, Interbloqueo AUX abierto
Descripción
El interbloqueo AUX está abierto por una conexión de
20582, La comunicación de SPI hacia la tarjeta
MIB está desactivada
interbloqueo externa. Se utiliza normalmente para Cartridge
Descripción
Bell System (CBS).
Estado activo cuando la prueba cíclica de habilitación 1 falla
con la tarjeta Manipulator Interface Board (MIB) arg.
Consecuencias
La cadena de habilitación de pintura se abre.
Consecuencias
El sistema pasa al estado SYS HALT.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
165
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
Acciones recomendadas
Compruebe los cables y la interfaz de periféricos serie (SPI).
Compruebe los cables que unen la tarjeta SIB a la tarjeta
Manipulator Interface Board (MIB).
20586, Fallo de vigilancia hacia el firmware de la
tarjeta PIB
Descripción
Estado activo cuando el software se encuentra en un fallo de
20583, Fallo de dispositivo de vigilancia hacia el
software de PIB
Descripción
dispositivo de vigilancia de descubrimiento de la tarjeta de
interfaz de proceso (PIB) hacia el firmware de la tarjeta PIB,
debido a un fallo de FPGA.
Consecuencias
Estado activo cuando el firmware se encuentra en un fallo de
El sistema pasa al estado SYS HALT.
dispositivo de vigilancia de descubrimiento de la tarjeta de
interfaz de proceso (PIB) entre el firmware de la tarjeta PIB y
el software de la tarjeta PIB.
Consecuencias
El sistema pasa al estado SYS HALT.
20587, Fallo de vigilancia hacia el firmware de la
tarjeta PIB
Descripción
Estado activo cuando el software se encuentra en un fallo de
Causas probables
dispositivo de vigilancia de descubrimiento de la tarjeta de
Carga de procesador demasiado elevada en el software de la
interfaz de proceso (PIB) hacia el firmware de la tarjeta PIB,
tarjeta PIB.
debido a un fallo en el microcontrolador incorporado en el
sistema.
20584, Fallo en la interfaz SPI interna
Descripción
Consecuencias
El sistema pasa al estado SYS HALT.
Estado activo mientras hay un fallo de dispositivo de vigilancia
de descubrimiento de la tarjeta de interfaz de proceso (PIB)
Causas probables
Firmware no ejecutándose.
hacia la tarjeta Safety Interface Board (SIB) y la tarjeta
Manipulator Interface Board (MIB).
20588, Fallo de dispositivo de vigilancia entre la
tarjeta PIB y el MC
Consecuencias
El sistema pasa al estado SYS HALT.
Descripción
Causas probables
La tarjeta de interfaz de proceso (PIB) ha detectado un fallo de
La comunicación con la interfaz de periféricos serie (SPI) está
vigilancia hacia el ordenador principal (MC).
desactivada en la SPI 1.
Consecuencias
Acciones recomendadas
El sistema pasa al estado SYS HALT.
Compruebe los cables entre las tarjetas PIB, SIB y MIB.
20585, Cadena de habilitación abierta desde IPS
Descripción
Causas probables
El cable de Ethernet se ha interrumpido entre la tarjeta PIB y
el MC. Alta carga en la red.
Acciones recomendadas
Estado activo mientras había una cadena de habilitación abierta
desde la señal Safety/PibSw/Enable.
Si el problema no desaparece: Inspeccione el MC. Inspeccione
el cable de Ethernet entre la PIB y el MC. Reinicie el controlador.
Consecuencias
Acciones recomendadas
20589, Fallo de dispositivo de vigilancia entre la
tarjeta PIB y la tarjeta MCOB
Compruebe el accionador conectado a la señal
Descripción
Safety/PibSw/Enable.
Estado activo mientras una conexión de agente sobre CAN
El sistema pasa al estado SYS HALT.
entre la tarjeta de interfaz de proceso (PIB) y la tarjeta
Manipulator Controller Board (MCOB) está desactivada.
Continúa en la página siguiente
166
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
El sistema pasa al estado SYS HALT.
20593, Alimentación de E/S insuficiente en la
tarjeta MCB
Acciones recomendadas
Descripción
Compruebe los cables de CAN. Compruebe el estado de la
Estado activo cuando la alimentación de E/S tenía menos de
tarjeta MCOB.
16 V en la tarjeta Manipulator Controller Board (MCB) arg.
Consecuencias
20590, Máscara de circuito abierto no definida
Descripción
Consecuencias
El sistema pasa al estado SYS HALT.
Acciones recomendadas
La máscara de circuito abierto para frenos de la tarjeta
Compruebe la alimentación en la tarjeta MCB.
Manipulator Controller Board (MCOB/MCB) arg no está definida.
La máscara debe definirse desde la tarjeta de interfaz de
proceso (PIB) durante el inicio.
Consecuencias
Este mensaje se generará cada vez que se liberen los frenos,
hasta que la máscara de circuito abierto de MCOB/MCB esté
definida.
20594, Fallo de comunicación entre la tarjeta PIB
y el MC
Descripción
La tarjeta de interfaz de proceso (PIB) ha detectado un fallo de
comunicación hacia el computador principal (MC).
Consecuencias
Causas probables
La configuración de IPS de la tarjeta PIB no está cargada o
falta el archivo de configuración de frenos.
El sistema pasa al estado SYS FAIL.
Causas probables
El cable de Ethernet se ha interrumpido entre la tarjeta PIB y
Acciones recomendadas
Compruebe que la configuración de IPS se cargue durante el
el MC. Alta carga en la red.
inicio. Compruebe que el archivo de configuración de IPS para
Acciones recomendadas
la configuración de los frenos esté instalado en la tarjeta PIB.
Inspeccione el cable de Ethernet entre la PIB y el MC.
Inspeccione el MC. Reinicie el controlador.
20591, Tiempo límite agotado en hot plug de
FlexPendant
20595, La comunicación de SPI hacia la tarjeta
PSA está desactivada
Descripción
El botón de hot plug del FlexPendant se ha presionado
Descripción
demasiado tiempo.
Estado activo cuando la prueba cíclica de habilitación 1 falla
con la tarjeta Paint Safety Adapter (PSA).
Consecuencias
El sistema pasa al estado SYS HALT.
Consecuencias
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Pulse el botón Motores ON para cerrar la cadena.
Acciones recomendadas
Compruebe el estado en la interfaz de periféricos serie (SPI).
20592, Habilitación externa de procesos abierta
Compruebe los cables entre las tarjetas MIB y Paint Safety
Adapter (PSA).
Descripción
Estado activo cuando la conexión de habilitación externa de
20600, Versión no oficial de RobotWare
procesos de la tarjeta Manipulator Controller Board (MCB) arg
Descripción
está abierta.
El RobotWare actual no es una versión admitida oficialmente.
Consecuencias
El sistema pasa al estado SYS HALT.
Las versiones no oficiales de RobotWare sólo pueden utilizarse
para fines de prueba y validación durante un tiempo limitado.
Acciones recomendadas
Compruebe las conexiones de la tarjeta MCB X2.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
167
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20610, Cortocircuito en fase de motor
Consecuencias
ABB no ofrece asistencia a largo plazo a las versiones no
oficiales.
Descripción
La unidad de accionamiento del eje arg informa de un
Acciones recomendadas
cortocircuito. El eje está conectado al módulo de accionamiento
Si este es un sistema de producción, instale una versión oficial
arg con la posición de unidad arg y el nodo arg.
de RobotWare lo antes posible.
Consecuencias
20601, Rutas demasiado largas al desempaquetar
archivos de RobotWare
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado Motors OFF con par cero.
Causas probables
Descripción
Cortocircuito en los cables o conectores entre las fases o a
El paquete de instalación de RobotWare no fue
tierra. Cortocircuito en el motor entre las fases o a tierra.
desempaquetado correctamente en el controlador. Algunos
archivos del paquete tienen una ruta demasiado larga y no
podrían ser gestionados por el software del controlador.
Durante el proceso de instalación, el software del controlador
fue actualizado para admitir rutas más largas, de forma que
una reinstalación del sistema debe resolver el problema.
Acciones recomendadas
Compruebe/sustituya los cables y conectores.
Compruebe/sustituya el motor.
20630, Trabajo de cámara sin Salida a RAPID
Consecuencias
Descripción
Algunos archivos de RobotWare faltan en el controlador y es
La cámara arg tiene un trabajo cargado que no se ha creado
posible que su sistema no pueda funcionar correctamente.
con la funcionalidad 'Use Output to RAPID'. Esta funcionalidad
se desactivará hasta el siguiente cambio de estado de modo
Acciones recomendadas
Reinstale el sistema con ayuda de SystemBuilder. Si el error
de programa a modo de ejecución.
no desaparece tras la reinstalación, póngase en contacto con
Consecuencias
la asistencia al cliente.
Cualquier funcionalidad que requiera el uso de salida a RAPID,
por ejemplo, CamGetResult, se apaga. CamGetParameter no
20602, Imagen no oficial de RobotWare
se ve afectada y sigue funcionando.
Causas probables
Descripción
La imagen actual de RobotWare contenida en el computador
principal no es original y por tanto no se ofrece asistencia oficial
El parámetro de configuración 'Use Output to Rapid' tiene el
valor 'Yes', pero debería ser 'No'. El trabajo cargado en la
cámara no es correcto o no es compatible con esta versión de
para ella.
RobotWare.
Consecuencias
ABB no ofrece asistencia a largo plazo a las versiones no
Acciones recomendadas
Cambie la cámara al modo de programa. Cargue un trabajo
oficiales de RobotWare.
válido en la cámara o utilice RobotStudio para crear uno. En
Causas probables
RobotStudio, en la pestaña 'Visión', seleccione 'Salida a RAPID'
La imagen publicada oficial para el computador principal ha
sido sustituida, por ejemplo con el fin de reunir datos de
diagnóstico para un problema determinado.
para convertir los parámetros en variables de RAPID y guarde
el trabajo. Cambie el parámetro de configuración 'Use Output
to Rapid' a 'No' si no tiene previsto usar esta funcionalidad.
Acciones recomendadas
Si este es un sistema de producción, instale una versión oficial
de RobotWare lo antes posible.
20631, Fallo de comunicación con la cámara
Descripción
El controlador de robot no ha podido comunicarse con la
cámara arg.
Consecuencias
Es posible que los resultados de la cámara se hayan perdido.
Continúa en la página siguiente
168
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20635, Demasiadas cámaras conectadas
Acciones recomendadas
Compruebe el estado de la cámara. Compruebe los cables que
unen el controlador del robot y la cámara.
20632, La dirección IP de la cámara ha cambiado
Descripción
Descripción
El número de cámaras conectadas al controlador de robot es
arg. El número máximo de cámaras para un controlador de
robot es arg.
Consecuencias
La dirección IP de la cámara arg ha cambiado. Es necesario
reiniciar el controlador para utilizar la funcionalidad Integrated
El controlador de robot no se comunicará con todas las
cámaras.
Vision.
Causas probables
Acciones recomendadas
Se ha rebasado el número máximo de cámaras para un
Reinicio del controlador
controlador de robot.
20633, Integrated Vision no instalado
Descripción
Acciones recomendadas
Reduzca el número de cámaras conectadas al controlador de
robot.
La opción Integrated Vision no está instalada en este sistema.
20636, Nombre de cámara duplicado
Consecuencias
No es posible ninguna comunicación con la cámara.
Descripción
Causas probables
La configuración de la cámara no es válida. El nombre de
Se ha utilizado o configurado la funcionalidad de Integrated
cámara arg se ha utilizado para más de una cámara.
Vision sin tener la opción Integrated Vision instalada.
Consecuencias
Acciones recomendadas
El controlador de robot no se comunicará con las cámaras que
Si la opción Integrated Vision es necesaria: configure un nuevo
tengan el mismo nombre.
sistema con esta opción e instale el sistema. Si la opción
Integrated Vision no es necesaria: elimine el uso de la
Causas probables
Se han configurado dos o más cámaras con el mismo nombre.
funcionalidad Integrated Vision, es decir, los datos de RAPID
Acciones recomendadas
o configuración.
Cambie los nombres de las cámaras de modo que tengan
20634, Sin resultado de un trabajo de cámara
actual
nombres exclusivos y realice un reinicio del controlador.
20637, Permiso de cámara denegado
Descripción
El controlador de robot no recibió ningún resultado para la
Descripción
Permiso denegado para iniciar una sesión en la cámara con la
cámara arg.
dirección IP arg y el nombre de usuario arg.
Consecuencias
El controlador de robot no reconocerá ningún dato de posición
Consecuencias
El controlador de robot no puede iniciar una sesión en la
en la imagen.
cámara.
Causas probables
No se ha definido ninguna herramienta de piezas para el trabajo
Causas probables
Nombre de usuario y/o contraseña incorrectos.
actual cargado en la cámara arg.
Acciones recomendadas
Acciones recomendadas
Use RobotStudio para añadir al trabajo una Herramienta de
ubicación de piezas o una Herramienta de inspección de piezas.
Siga las instrucciones del menú contextual de RobotStudio y
Desde el complemento Integrated Vision de RobotStudio, utilice
"Definir usuario de controlador" para seleccionar las
credenciales de inicio de sesión de la cámara que utilizará el
controlador.
guarde el trabajo.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
169
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
20638, Falta una opción
peticiones de imagen, ajuste la configuración. Inicie e inténtelo
de nuevo. Si el problema persiste, reinicie la cámara.
Descripción
Está intentando usar una funcionalidad que requiere la opción
de RobotWare arg.
20652, Trabajo de cámara no válido
Descripción
Acciones recomendadas
Compruebe qué opciones están presentes en su sistema.
Corrija sus opciones del sistema y restablezca el sistema.
El trabajo cargado en la cámara arg no es correcto o no es
compatible con esta versión de RobotWare.
Consecuencias
20639, Conexión de la cámara activada
La cámara se restablecerá al modo de programa.
Descripción
Causas probables
El controlador del robot se comunica correctamente con la
El trabajo cargado en la cámara no es correcto o no es
cámara arg con dirección IP arg.
compatible con esta versión de RobotWare. El parámetro de
configuración 'Use Output to Rapid' tiene el valor 'Yes', pero
20640, Conexión de la cámara desactivada
debería ser 'No'.
Acciones recomendadas
Descripción
Se ha perdido la conexión con la cámara arg con dirección IP
Si no prevé utilizar la funcionalidad Salida a RAPID, p. ej.,
CamGetResult, cambie el valor de 'Use Output to Rapid' a 'No'.
arg.
Si necesita la funcionalidad 'Use of Output to Rapid', es
Consecuencias
necesario cargar un trabajo correcto en la cámara. Asegúrese
El controlador del robot no puede acceder a la cámara.
de que los campos de la pestaña 'Output to Rapid' estén
guardados antes de cargar el trabajo.
Acciones recomendadas
Compruebe el cableado y la configuración de la cámara.
20655, Ningún trabajo en la cámara cargado
20641, Se ha detectado una cámara nueva
Descripción
Descripción
No hay ningún trabajo cargado en la cámara arg o el trabajo
Se ha detectado una cámara nueva con dirección MAC arg.
activo en la cámara no ha sido guardado.
Consecuencias
20651, Tiempo límite de petición de imagen
Si no hay ningún trabajo cargado en la cámara, el controlador
Descripción
de robot no reconocerá ningún dato de posición en la imagen.
Una petición de imagen a la cámara arg agotó su tiempo límite.
Acciones recomendadas
Consecuencias
Si no hay ningún trabajo cargado en la cámara, use RobotStudio
Si la cámara sigue procesando la imagen, es posible que los
para crear un trabajo y añadir al trabajo una herramienta de
nuevos comandos enviados a la cámara queden sin respuesta
ubicación de piezas o una herramienta de inspección de piezas.
y también se agote su tiempo límite. Si la imagen que se está
Siga las instrucciones del menú contextual de RobotStudio y
procesando se completa, el resultado se insertará en la base
guarde el trabajo. Si ya hay un trabajo activo en la cámara,
de datos.
guarde el trabajo.
Causas probables
Es posible que el tiempo límite establecido en la configuración
20656, Actualización de la cámara iniciada
para el tiempo máximo para las peticiones de imágenes sea
Descripción
demasiado breve. Es posible que la cámara se encuentre en
Un cliente externo ha ordenado la actualización de la
un estado de error. La comunicación con la cámara se ha caído.
información de la cámara.
Acciones recomendadas
Consecuencias
Si el tiempo de procesamiento de las imágenes es más largo
Si la cámara está ocupada realizando una operación que le
que el tiempo máximo establecido en la configuración para las
requerirá tiempo como la carga de un trabajo o el
Continúa en la página siguiente
170
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.4 2 xxxx
Continuación
procesamiento de una imagen, el servicio de actualización de
Acciones recomendadas
dicha cámara se postergará hasta que la operación en curso
Si una cámara ya configurada ha cambiado la dirección IP,
haya terminado.
arranque el controlador en caliente.
20657, La dirección IP de la cámara ha cambiado
20658, Cámara actualizada
Descripción
Descripción
La dirección IP de la cámara arg con dirección MAC arg ha
La cámara arg con dirección IP arg y dirección MAC arg ha
cambiado.
sido actualizada.
Dirección IP antigua arg.
Dirección IP nueva arg.
20659, Instrucción de la cámara
Consecuencias
Descripción
Para que el controlador se conecte a una cámara configurada
La cámara arg es de tipo arg. La instrucción arg no está
que tiene una dirección IP nueva, es necesario un arranque en
disponible en la cámara arg.
caliente del controlador.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
171
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
5.5 3 xxxx
31810, Falta la tarjeta maestro/esclavo de
DeviceNet
Descripción
La tarjeta maestro/esclavo de DeviceNet no funciona.
31912, Fallo de la tarjeta de maestro de
PROFIBUS
Descripción
La tarjeta de maestro de PROFIBUS no se ha iniciado
Consecuencias
No es posible ninguna comunicación en la red DeviceNet.
correctamente.
Consecuencias
Causas probables
La tarjeta maestro/esclavo de DeviceNet no funciona
No es posible ninguna comunicación en el bus Profibus.
Causas probables
correctamente o no está instalada.
Es posible que el hardware de la tarjeta de maestro de
Acciones recomendadas
Asegúrese de que tiene instalada una tarjeta maestro/esclavo
de DeviceNet. Sustituya la tarjeta si presenta fallos.
PROFIBUS no funcione correctamente.
Acciones recomendadas
Permite reiniciar el sistema. Sustituya la tarjeta de maestro de
31910, Falta la tarjeta de maestro de PROFIBUS
Descripción
La tarjeta de maestro de PROFIBUS no funciona.
PROFIBUS si presenta fallos.
31913, Error interno de la tarjeta maestro de
PROFIBUS
Consecuencias
No es posible ninguna comunicación en el bus Profibus.
Descripción
La tarjeta maestro de PROFIBUS informó del error internoarg.
Causas probables
La tarjeta de maestro de PROFIBUS funciona incorrectamente
Consecuencias
No es posible ninguna comunicación en la red PROFIBUS.
o no está instalada.
Causas probables
Acciones recomendadas
Asegúrese de que tiene instalada una tarjeta de maestro de
PROFIBUS. Sustituya la tarjeta si presenta fallos.
Es posible que el hardware de la tarjeta de maestro de
PROFIBUS no funcione correctamente.
Acciones recomendadas
31911, Error de actualización de tarjeta Profibus
Reinicie el sistema. Sustituya la tarjeta maestro de PROFIBUS
si presenta fallos.
Descripción
El software de RobotWare no pudo transferir el nuevo software
de controlador a la tarjeta de maestro de PROFIBUS. No fue
posible programar el canal arg (ch arg) de la tarjeta Profibus.
31914, Error en la puesta en marcha de la red
PROFIBUS
Descripción
Código de error interno:arg.
Error de puesta en marcha de red PROFIBUS arg. Compruebe
Consecuencias
No es posible ninguna comunicación en el bus Profibus.
Causas probables
los cables, terminadores y módulos y reinicie de nuevo.
31915, Error de red PROFIBUS
Es posible que el software de RobotWare esté dañado o que
el hardware de la tarjeta presente fallos de funcionamiento.
Descripción
Error de red del maestro de PROFIBUS.
Acciones recomendadas
Reinicie el sistema para volver a intentar la transferencia del
software. Reinstale los archivos de sistema actuales. Cree y
Error interno
Código de error arg.
ejecute un nuevo sistema para transferir el software de
Consecuencias
controlador. Sustituya la tarjeta si presenta fallos.
Algunos errores asociados esperados pueden retrasarse.
Continúa en la página siguiente
172
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Causas probables
Cableado, terminadores y/o módulos de PROFIBUS
defectuosos.
Direcciones de PROFIBUS duplicadas.
Acciones recomendadas
32530, Sin comunicación con el sistema de
seguridad
Descripción
No hay ninguna comunicación serie entre el sistema de
seguridad y la tarjeta de comunicación del robot.
Compruebe los cables, terminadores y módulos.
Consecuencias
El sistema pasa al estado SYS FAIL.
31916, Red PROFIBUS OK
Causas probables
Descripción
Es posible que exista alguna avería física en el cable que une
PROFIBUS ha recuperado el contacto con el maestro de la red.
el sistema de seguridad a la tarjeta de comunicación del robot.
El sistema de seguridad o su fuente de alimentación también
31917, Excepción de la tarjeta de maestro de
PROFIBUS
pueden ser defectuosos.
Descripción
Reinicie el sistema para reanudar el funcionamiento. Asegúrese
Se ha producido un error no recuperable en la tarjeta de
de que el cable que une la tarjeta de comunicación del robot
maestro de PROFIBUS. Canal arg de la tarea arg. Parámetros
al sistema de seguridad funcione correctamente y esté bien
arg.
conectado. Compruebe la alimentación del sistema de
Consecuencias
seguridad. Sustituya la unidad si está defectuosa.
Acciones recomendadas
No es posible ninguna comunicación en el bus Profibus.
Causas probables
Es posible que el hardware de la tarjeta de maestro de
PROFIBUS no funcione correctamente.
32540, Regrabación de firmware de unidad de
accionamiento iniciada
Descripción
En el módulo de accionamiento arg se ha iniciado una
Acciones recomendadas
Permite reiniciar el sistema. Sustituya la tarjeta de maestro de
actualización necesaria del firmware de la unidad de
accionamiento de la posición de unidad arg. La revisión anterior
PROFIBUS si presenta fallos.
del firmware, arg, es sustituida por la revisión arg.
32501, Sin contacto con la FPGA del ordenador
principal
Acciones recomendadas
Espere a que se complete el proceso de actualización del
firmware. ¡No apague la alimentación del sistema!
Descripción
El sistema no puede contactar con la FPGA del ordenador
principal.
32541, Regrabación de firmware de unidad de
accionamiento completada
Consecuencias
No es posible la comunicación con el sistema de seguridad. El
Descripción
En el módulo de accionamiento arg, la actualización del
sistema pasa al estado SYS FAIL.
firmware de la unidad de accionamiento de la posición de
Causas probables
unidad arg se ha completado. La nueva revisión es la arg.
La FPGA del ordenador principal está defectuosa.
Acciones recomendadas
32542, Hardware de unidad de accionamiento no
admitido
Sustituya la unidad defectuosa.
Descripción
En el Drive Module arg, el sistema no puede usar la unidad de
accionamiento que tiene la identidad de hardware arg porque
la revisión de hardware arg no se admite.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
173
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Consecuencias
Consecuencias
El sistema no puede usar la unidad de accionamiento. El
La actualización necesaria del firmware de la unidad de
sistema pasa al estado de fallo del sistema.
accionamiento no se ha realizado.
Causas probables
Causas probables
La versión de RobotWare es demasiado antigua para admitir
La instalación de RobotWare se encuentra en mal estado.
la unidad de accionamiento.
Acciones recomendadas
Acciones recomendadas
Reinstale el sistema.
Actualice el sistema a una versión de RobotWare que admita
la revisión de la unidad de accionamiento. Sustituya la unidad
de accionamiento por una que tenga una revisión compatible.
32543, Fallo de regrabación de firmware de
unidad de accionamiento
Descripción
32546, Error de archivo de firmware de unidad
de accionamiento
Descripción
El archivo arg, necesario para actualizar el firmware de una
unidad de accionamiento, no puede usarse porque no ha
superado la comprobación de integridad.
En el Drive Module arg, la actualización del firmware de la
unidad de accionamiento de la posición de unidad arg ha
fallado.
Consecuencias
La actualización necesaria del firmware de la unidad de
accionamiento no se ha realizado.
Consecuencias
Causas probables
La actualización necesaria del firmware de la unidad de
La instalación de RobotWare se encuentra en mal estado.
accionamiento no se ha realizado.
Acciones recomendadas
Acciones recomendadas
Reinstale el sistema.
Compruebe si hay otros mensajes en el registro de eventos de
hardware para obtener una explicación detallada de la situación
32550, Regrabación de firmware iniciada
de error. Pruebe de nuevo reiniciando el controlador con el
Descripción
interruptor de alimentación principal.
Se ha iniciado una actualización obligatoria del firmware de
32544, Archivo de firmware de unidad de
accionamiento no encontrado
arg. Archivo utilizado: arg].
Acciones recomendadas
Espere a que se complete la regrabación.
Descripción
No se encuentra el archivo arg, necesario para actualizar el
firmware de una unidad de accionamiento.
32551, Regrabación de firmware completada
Consecuencias
Descripción
La actualización necesaria del firmware de la unidad de
La actualización del firmware de arg se ha completado
accionamiento no se ha realizado.
correctamente.
Causas probables
La instalación de RobotWare no contiene el archivo de firmware.
32552, Fallo de regrabación de firmware
Descripción
Acciones recomendadas
La actualización del firmware de arg ha fallado.
Reinstale el sistema.
Código de error interno:arg
32545, Error de tipo de archivo de firmware de
unidad de accionamiento
Acciones recomendadas
Compruebe otros mensajes para obtener una explicación
detallada. Reinicie el sistema. Reinstale el sistema. Sustituya
Descripción
El archivo arg, necesario para actualizar el firmware de una
la arg.
unidad de accionamiento, es de un tipo incorrecto.
Continúa en la página siguiente
174
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
32553, Archivo de firmware dañado
Descripción
32562, Error de comunicación con el ordenador
de ejes
El archivo de firmware [arg] está dañado. Código de error
Descripción
interno:arg
El sistema no pudo comunicarse con el ordenador de ejes del
módulo de accionamiento arg al intentar leer la información del
Acciones recomendadas
firmware.
Reinstale el sistema.
Consecuencias
32554, Archivo de firmware no encontrado
El sistema no puede determinar si se requiere una actualización
del firmware en el módulo de accionamiento afectado. El
Descripción
No se encuentra el archivo de firmware [arg].
sistema pasa al estado de fallo del sistema.
Causas probables
Acciones recomendadas
Puede deberse a que hay un cable roto o un conector mal
Reinstale el sistema.
conectado, o bien a que existan niveles elevados de
32555, Unidad de sistema de seguridad no
admitida
interferencias en el cable que une el ordenador principal al
ordenador de ejes.
Acciones recomendadas
Descripción
Asegúrese de que el cable que une el ordenador principal al
El sistema no puede utilizar la unidad de sistema de seguridad
arg, revisión arg.
ordenador de ejes no esté dañado y de que los dos conectores
estén conectados correctamente. Asegúrese de que no se
Consecuencias
produzca una emisión de niveles extremos de interferencia
El sistema no puede usar el hardware afectado.
electromagnética cerca de los cables del robot.
Acciones recomendadas
Cambie el hardware afectado a una versión compatible.
32560, Regrabación de firmware de ordenador
de ejes iniciada
32563, Hardware de ordenador de ejes no
admitido
Descripción
En el módulo de accionamiento arg, el sistema no puede usar
el ordenador de ejes que tiene la identidad de hardware arg
Descripción
En el módulo de accionamiento arg se ha iniciado una
porque la revisión de hardware arg no se admite.
actualización necesaria del firmware del ordenador de ejes arg
Consecuencias
con la identidad de hardware arg. La revisión anterior del
El sistema no puede usar el ordenador de ejes. El sistema pasa
firmware, arg, es sustituida por la revisión arg.
al estado de fallo del sistema.
Acciones recomendadas
Causas probables
Espere a que se complete el proceso de actualización del
La versión de RobotWare es demasiado antigua para admitir
firmware. ¡No apague la alimentación del sistema!
la unidad de ordenador de ejes.
Acciones recomendadas
32561, Regrabación de firmware de ordenador
de ejes completada
Sustituya el ordenador de ejes por uno que tenga una revisión
Descripción
que admita la revisión del ordenador de ejes.
compatible. Actualice el sistema a una versión de RobotWare
En el módulo de accionamiento arg se ha completado la
actualización del firmware del ordenador de ejes arg con la
identidad de hardware arg. La nueva revisión es la arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
175
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
32564, Fallo de regrabación de firmware de
ordenador de ejes
32568, Error de archivo de firmware de ordenador
de ejes
Descripción
Descripción
En el módulo de accionamiento arg la actualización del firmware
El archivo arg, necesario para actualizar el firmware de un
del ordenador de ejes arg con la identidad de hardware arg ha
ordenador de ejes, no puede usarse porque no ha superado la
fallado.
comprobación de integridad.
Consecuencias
Consecuencias
La actualización necesaria del firmware del ordenador de ejes
La actualización necesaria del firmware del ordenador de ejes
no se ha realizado.
no se ha realizado.
Acciones recomendadas
Causas probables
Compruebe si hay otros mensajes en el registro de eventos de
El archivo de firmware está dañado.
hardware para obtener una explicación detallada de la situación
de error. Pruebe de nuevo reiniciando el sistema con el
Acciones recomendadas
Reinstale el sistema.
interruptor de alimentación principal.
32565, Archivo de firmware de ordenador de ejes
no encontrado
32569, Hardware de ordenador de ejes dañado
Descripción
En el módulo de accionamiento arg, la memoria flash del
Descripción
ordenador de ejes contiene datos dañados.
No se encuentra el archivo arg, necesario para actualizar el
Acciones recomendadas
firmware de un ordenador de ejes.
Pruebe de nuevo reiniciando el sistema con el interruptor de
Consecuencias
alimentación principal. Si el problema no desaparece, sustituya
La actualización necesaria del firmware del ordenador de ejes
el ordenador de ejes.
no se ha realizado.
32570, Regrabación de firmware iniciada
Causas probables
La instalación de RobotWare no contiene el archivo de firmware.
Descripción
Acciones recomendadas
Se ha iniciado una actualización obligatoria del firmware de
Reinstale el sistema.
arg. Sustituyendo la versión anterior del firmware: arg].
32567, Error de tipo de archivo de firmware de
ordenador de ejes
Acciones recomendadas
Espere a que se complete la regrabación.
32571, Regrabación de firmware completada
Descripción
El archivo arg, necesario para actualizar el firmware de un
ordenador de ejes, es de un tipo incorrecto.
Consecuencias
Descripción
La actualización del firmware de arg se ha completado
correctamente. Nueva versión: [arg]. Código interno:[arg]
La actualización necesaria del firmware del ordenador de ejes
no se ha realizado.
32572, Fallo de regrabación de firmware
Causas probables
Descripción
El archivo de firmware está dañado.
La actualización del firmware de arg ha fallado.
Acciones recomendadas
Versión actual:arg. Código de error interno:arg.
Reinstale el sistema.
Acciones recomendadas
Compruebe si existen otros mensajes en el registro de eventos
de hardware para obtener una explicación detallada de la
situación de error. Reinstale el sistema.
Continúa en la página siguiente
176
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
32573, Imposible transferir el archivo de firmware
Consecuencias
El sistema pasa al estado de fallo del sistema.
Descripción
No se encuentra el archivo de firmware arg. Código de error
Causas probables
interno:arg.
Ha fallado la comprobación de integridad de la información
almacenada sobre la unidad en el ordenador de ejes.
Acciones recomendadas
Acciones recomendadas
Reinstale el sistema.
Pruebe de nuevo reiniciando el sistema con el interruptor de
32574, Hardware de ordenador de ejes dañado
alimentación principal. Sustituya el ordenador de ejes
defectuoso.
Descripción
La memoria flash arg contiene datos dañados. Código de error
32580, Regrabación de firmware iniciada
interno:arg.
Descripción
Acciones recomendadas
Compruebe si existen otros mensajes en el registro de eventos
de hardware para obtener una explicación detallada de la
situación de error. Reinicie el sistema. Si el fallo vuelve a
producirse, sustituya el ordenador de ejes.
Se ha iniciado una actualización obligatoria del firmware de
arg. Código interno: [arg].
Archivo: [ arg].
Acciones recomendadas
Espere a que se complete la regrabación.
32575, No se encuentra ninguna tarjeta de
ordenador de ejes
32581, Regrabación de firmware completada
Descripción
Descripción
El sistema no pudo detectar ningún ordenador de ejes
La actualización del firmware de arg se ha completado
conectado.
correctamente. Código interno:[arg]
Acciones recomendadas
Acciones recomendadas
Compruebe qué tarjeta de ordenador de ejes se encuentra en
No se requiere ninguna acción
el sistema. Compruebe los cables Ethernet que unen el
ordenador principal al ordenador de ejes. Reinicie el sistema.
32582, Fallo de regrabación de firmware
Descripción
32576, Firmware de ejes: Sin comunicación
La actualización del firmware de arg ha fallado.
Descripción
Código de error interno:arg.
El sistema no pudo comunicarse con la tarjeta de ejes arg al
Acciones recomendadas
intentar comprobar la versión del firmware.
Compruebe los demás mensajes de error para obtener una
Consecuencias
explicación detallada. Reinstale el sistema.
El sistema es incapaz de comprobar y, en caso necesario,
también actualizar el firmware del ordenador de ejes afectado.
32583, Archivo de firmware dañado
Acciones recomendadas
Descripción
Compruebe si el sistema contiene una tarjeta de ordenador de
La actualización del firmware de arg ha fallado.
ejes. Compruebe el cableado de Ethernet que une el ordenador
El archivo de firmware [ arg] está dañado.
principal al ordenador de ejes. Reinicie el sistema.
Código de error interno:arg.
Acciones recomendadas
32577, Error de datos de hardware del ordenador
de ejes
Reinstale el sistema.
Descripción
En el módulo de accionamiento arg, el ordenador de ejes
contiene datos dañados sobre la unidad.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
177
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
32584, Archivo de firmware no encontrado
32593, Archivo de firmware dañado
Descripción
Descripción
La actualización del firmware de arg ha fallado.
La actualización del firmware de arg del módulo de
No se encuentra el archivo de firmware [ arg].
accionamiento arg ha fallado.
Código de error interno:arg.
El archivo de firmware [arg] está dañado.
Acciones recomendadas
Acciones recomendadas
Reinstale el sistema.
Reinstale el sistema.
32585, Ningún sistema de seguridad detectado
por el ordenador de ejes
32594, Archivo de firmware no encontrado
Descripción
La actualización del firmware de arg del módulo de
El ordenador de ejes no pudo detectar el sistema de seguridad.
accionamiento arg ha fallado.
Descripción
No se encuentra el archivo de firmware [arg].
Acciones recomendadas
Compruebe los cables de comunicación entre el ordenador de
Acciones recomendadas
ejes y el sistema de seguridad. Compruebe la alimentación del
Reinstale el sistema.
sistema de seguridad. Reinicie el sistema.
32590, Regrabación de firmware iniciada
32601, Falta la tarjeta de maestro/esclavo de
Interbus
Descripción
Descripción
Se ha iniciado una actualización obligatoria del firmware de arg
La tarjeta de maestro/esclavo de Interbus no funciona.
del módulo de accionamiento arg.
Consecuencias
Archivo: [ arg].
No es posible ninguna comunicación en el bus Interbus.
Acciones recomendadas
Causas probables
Espere a que se complete la regrabación, que requerirá
aproximadamente 3 minutos y medio.
32591, Regrabación de firmware completada
La tarjeta de maestro/esclavo de Interbus funciona
incorrectamente o no está instalada.
Acciones recomendadas
Asegúrese de que tiene instalada una tarjeta de
Descripción
maestro/esclavo de Interbus. Sustituya la tarjeta si presenta
La actualización del firmware de arg del módulo de
fallos.
accionamiento arg se ha completado correctamente.
32651, El hardware del puerto serie no está
disponible.
Acciones recomendadas
No se requiere ninguna acción
Descripción
32592, Fallo de regrabación de firmware
El sistema ha intentado sin éxito direccionar el puerto serie
Descripción
arg.
La actualización del firmware de arg del módulo de
Consecuencias
accionamiento arg ha fallado.
El hardware del puerto serie opcional no está disponible. Ni el
Acciones recomendadas
conector ni el canal físico que utilizan el conector estarán
Compruebe los demás mensajes de error para obtener una
disponibles para su uso.
explicación detallada. Reinstale el sistema.
Causas probables
El hardware del puerto serie funciona incorrectamente o no
está instalado.
Continúa en la página siguiente
178
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
34101, Sistema de accionamiento no admitido
Acciones recomendadas
Asegúrese de que el hardware de puerto serie necesario esté
instalado correctamente y que no presente fallos. Sustituya el
hardware del puerto serie.
Descripción
El sistema de accionamiento configurado en el módulo de
accionamiento arg no es del tipo Drive System '09.
33503, Fallo de actualización de
cuentarrevoluciones
Consecuencias
El sistema pasa al estado de fallo del sistema.
Causas probables
Descripción
La actualización del cuentarrevoluciones del eje arg ha fallado.
Se ha utilizado una clave de módulo de accionamiento
incorrecta; es decir, la configuración no se corresponde con el
Consecuencias
hardware. Hardware incorrecto utilizado en el sistema.
Eje no sincronizado
Acciones recomendadas
Causas probables
Reinstale el sistema con una clave de módulo de accionamiento
Falta un eje o no está activo. Error del sistema de medición.
Acciones recomendadas
que se corresponda con el hardware. Sustituya el módulo de
accionamiento con uno que admita Drive System '09.
Compruebe si el eje está activo. Compruebe los archivos de
configuración. Compruebe el sistema de medición.
33601, Falta el módulo Anybus
34200, Comunicación perdida con todas las
unidades de accionamiento
Descripción
Descripción
En el módulo de accionamiento arg, el ordenador de ejes ha
Falta el módulo Anybus.
perdido la comunicación con todas las unidades de
accionamiento.
Consecuencias
No puede realizarse ninguna comunicación con el módulo
Consecuencias
Anybus.
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado Motors OFF con par cero.
Causas probables
El módulo Anybus funciona incorrectamente o no está instalado.
Causas probables
Problema de comunicación entre las unidades de accionamiento
Acciones recomendadas
Asegúrese de que tiene instalado un módulo Anybus. Sustituya
el módulo si presenta fallos.
y el ordenador de ejes.
Acciones recomendadas
Compruebe que todos los cables estén conectados
34100, Sistema de accionamiento no admitido
correctamente. Compruebe que las unidades de accionamiento
tengan alimentación de lógica. Compruebe/sustituya los cables
Descripción
El sistema de accionamiento configurado en el módulo de
accionamiento arg no es del tipo Drive System '04.
de Ethernet. Compruebe si existen otros mensajes en el registro
de eventos de hardware. Compruebe si el registro de eventos
contiene mensajes de error de las unidades de alimentación.
Consecuencias
Compruebe los cables que unen la unidad de fuente de
El sistema pasa al estado de fallo del sistema.
alimentación a la unidad de accionamiento. Compruebe la salida
Causas probables
de 24 V de la unidad de fuente de alimentación.
Se ha utilizado una clave de módulo de accionamiento
hardware. Hardware incorrecto utilizado en el sistema.
34202, Comunicación perdida con la unidad de
accionamiento
Acciones recomendadas
Descripción
Reinstale el sistema con una clave de módulo de accionamiento
En el módulo de accionamiento arg, el ordenador de ejes ha
que se corresponda con el hardware. Sustituya el módulo de
perdido la comunicación con la unidad de accionamiento de la
accionamiento con uno que admita Drive System '04.
posición de unidad arg.
incorrecta; es decir, la configuración no se corresponde con el
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
179
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
34251, Falta una fase de entrada de alimentación
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado Motors OFF con par cero.
Descripción
En el módulo de accionamiento arg, la unidad de rectificación
Causas probables
de la posición de unidad de accionamiento arg ha detectado
Problema de comunicación entre la unidad de accionamiento
un fallo en una fase.
y el ordenador de ejes.
Consecuencias
Acciones recomendadas
El sistema puede detenerse al existir una tensión insuficiente
Compruebe que todos los cables estén conectados
en el rectificador.
correctamente. Compruebe que la unidad de accionamiento
tenga alimentación de lógica. Compruebe/sustituya los cables
de Ethernet. Compruebe si existen otros mensajes en el registro
de eventos de hardware. Compruebe si el registro de eventos
contiene mensajes de error de las unidades de alimentación.
Causas probables
Fallo en una fase de la entrada de alimentación. Existe alguna
avería en el cableado o en los componentes trifásicos internos.
El rectificador es defectuoso.
Compruebe los cables que unen la unidad de fuente de
Acciones recomendadas
alimentación a la unidad de accionamiento. Compruebe la salida
Compruebe todas las fases de la alimentación al armario.
de 24 V de la unidad de fuente de alimentación.
Compruebe todos los componentes trifásicos internos
(interruptor principal, filtro de alimentación, fusible, contactores)
34203, Intensidad demasiado elevada en el motor
y los cables del módulo de accionamiento.
Descripción
34252, Falta la entrada de alimentación
La intensidad del motor es demasiado elevada para el eje arg,
conectado al módulo de accionamiento arg con la unidad de
Descripción
accionamiento en la posición de unidad arg y el nodo arg.
En el módulo de accionamiento arg, la unidad de rectificación
de la posición de unidad de accionamiento arg ha detectado
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado Motors OFF.
una pérdida de tensión de red.
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
Causas probables
La configuración del motor es incorrecta. Es posible que la
fallo. El sistema pasa al estado Motors OFF.
carga del eje sea excesiva o que el motor se haya bloqueado
Causas probables
(quizá a causa de una colisión). El motor es demasiado pequeño
Pérdida de tensión en la entrada de alimentación. Existe alguna
para la unidad de accionamiento. Cortocircuito entre fases del
avería en el cableado o en los componentes trifásicos internos.
motor o a tierra.
La unidad de rectificación está defectuosa.
Acciones recomendadas
Acciones recomendadas
Compruebe que la configuración del motor sea correcta.
Compruebe la tensión de la entrada de alimentación.
Compruebe que el robot no haya colisionado. Si es posible,
Compruebe todos los componentes trifásicos internos
reduzca la velocidad del programa de usuario. Compruebe que
(interruptor principal, filtro de alimentación, fusible, contactores)
la carga del eje no sea excesiva para el motor. Verifique que
y los cables del módulo de accionamiento.
la intensidad máxima del motor no sea demasiado baja en
comparación con la intensidad máxima de la unidad de
accionamiento. Compruebe el cable a motor y el propio motor,
midiendo sus respectivas resistencias. Desconecte antes de
la medición.
34255, Error de temperatura de rectificador
Descripción
En el módulo de accionamiento arg, la unidad de rectificación
de la posición de unidad de accionamiento arg ha alcanzado
un nivel de temperatura excesivo.
Consecuencias
No podrá realizar ninguna operación hasta que el rectificador
se haya enfriado. El sistema pasa al estado Motors OFF.
Continúa en la página siguiente
180
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Causas probables
Consecuencias
Es posible que los ventiladores de refrigeración estén
No podrá realizar ninguna operación hasta haber corregido el
defectuosos o que el flujo de aire esté obstruido. Es posible
fallo. El sistema pasa al estado Motors OFF.
que la temperatura ambiente sea excesiva. Es posible que el
AVISO DE ALTA TENSIÓN: EL RECTIFICADOR NO SE
sistema esté funcionando con un par demasiado alto durante
DESCARGA AL APAGAR EL SISTEMA.
periodos prolongados.
Causas probables
Acciones recomendadas
Puede deberse a fallos en el cable de la resistencia de frenado
Compruebe que los ventiladores estén funcionando y que el
o en la resistencia en si.
flujo de aire no esté obstruido. Compruebe que la temperatura
ambiente no sobrepase la temperatura nominal del armario. Si
es posible, escriba de nuevo el programa del usuario para
reducir las aceleraciones y deceleraciones bruscas. Reduzca
el par estático debido a la gravedad o fuerzas externas.
Acciones recomendadas
AVISO: PUEDE EXISTIR ALTA TENSIÓN. Asegúrese de que
el cable de la resistencia de frenado esté conectado
correctamente a la unidad de rectificación. Desconecte la
resistencia de drenaje y compruebe el cable y mida su valor.
La resistencia debe ser de aproximadamente arg ohmios.
34256, Aviso de temperatura de rectificador
Descripción
En el módulo de accionamiento arg, la unidad de rectificación
de la posición de unidad de accionamiento arg se está
acercando a un nivel de temperatura excesivo.
34258, Cortocircuito en circuito de resistencia
de drenaje
Descripción
En el módulo de accionamiento arg, la resistencia de frenado
Consecuencias
conectada a la unidad de rectificación de la posición de unidad
Es posible continuar, pero el margen hasta la temperatura
de accionamiento arg indica un cortocircuito.
máxima permitida es demasiado estrecho para mantener el
funcionamiento mucho tiempo.
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
Causas probables
fallo. El sistema pasa al estado Motors OFF.
Es posible que los ventiladores de refrigeración estén
AVISO DE ALTA TENSIÓN: EL RECTIFICADOR NO SE
defectuosos o que el flujo de aire esté obstruido. Es posible
DESCARGA AL APAGAR EL SISTEMA.
que la temperatura ambiente sea excesiva. Es posible que el
sistema esté funcionando con un par demasiado alto durante
periodos prolongados.
Causas probables
Puede deberse a fallos en el cable de la resistencia de frenado
o en la resistencia en si.
Acciones recomendadas
Acciones recomendadas
Compruebe que los ventiladores estén funcionando y que el
flujo de aire no esté obstruido. Compruebe que la temperatura
ambiente no sobrepase la temperatura nominal del armario. Si
es posible, escriba de nuevo el programa del usuario para
reducir las aceleraciones y deceleraciones bruscas. Reduzca
el par estático debido a la gravedad o fuerzas externas.
AVISO: PUEDE EXISTIR ALTA TENSIÓN. Asegúrese de que
el cable de la resistencia de frenado esté conectado
correctamente a la unidad de rectificación. Desconecte la
resistencia de freando y compruebe el cable y mida el valor de
la resistencia, que debe ser de aproximadamente arg ohmios.
Compruebe si existe una derivación a tierra en la resistencia
de frenado.
34257, Circuito abierto en circuito de resistencia
de drenaje
Descripción
34261, Error de inicio de rectificador
Descripción
En el módulo de accionamiento arg, la resistencia de frenado
conectada a la unidad de rectificación de la posición de unidad
de accionamiento arg tiene una resistencia excesiva (circuito
En el módulo de accionamiento arg, el relé de control de
conexión de la unidad de rectificación de la posición de unidad
de accionamiento arg indica un error.
abierto).
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
181
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Consecuencias
trifásicos internos (interruptor principal, filtro de red, fusible,
No podrá realizar ninguna operación hasta haber corregido el
contactores) y el cableado del Drive Module. Si se trata de un
fallo. El sistema pasa al estado Motors OFF.
sistema recién instalado con transformador de red, compruebe
la selección de tensión del transformador. Si la unidad de
Causas probables
Puede deberse a un fallo del relé de control de conexión del
accionamiento tiene ejes adicionales, compruebe el cableado
del rectificador. Si el problema persiste, reemplace la unidad.
rectificador.
Acciones recomendadas
Reinicie el sistema e inténtelo de nuevo. Si el problema no
desaparece, sustituya la unidad.
34264, Limitación de inrush de rectificador
activada con Motors ON
Descripción
34262, Aviso de frecuencia de entrada de
alimentación
En el módulo de accionamiento arg, la resistencia de control
de inrush de la posición de unidad de accionamiento arg se
activa incorrectamente.
Descripción
En el módulo de accionamiento arg, la tensión de la entrada
de alimentación presenta una frecuencia incorrecta. La unidad
de rectificación de la posición de unidad de accionamiento arg
ha informado del problema.
Consecuencias
El sistema pasa al estado Motors OFF para proteger el
hardware.
Causas probables
Este error se produce cuando la tensión del rectificador se
Consecuencias
El sistema puede detenerse al existir una tensión insuficiente
en el rectificador.
reduce demasiado y faltan todas las fases de la alimentación.
Acciones recomendadas
Compruebe si existen otros mensajes de error en el registro
Causas probables
La frecuencia de la entrada de alimentación no cumple las
especificaciones. Cortocircuito entre las fases del motor o a
de eventos de hardware. Compruebe la tensión de red entrante.
Compruebe que esté seleccionada la tensión correcta mediante
los puentes del transformador (opcional). Compruebe todos
tierra.
los componentes trifásicos internos (interruptor principal, filtro
Acciones recomendadas
de red, fusible, contactores) y el cableado del módulo de
Compruebe y ajuste la frecuencia de la entrada de alimentación.
accionamiento.
Compruebe el cable del motor y el motor midiendo sus
respectivas resistencias. Desconecte antes de la medición.
34263, Error de puesta en marcha de rectificador
34265, Error de cortocircuito de rectificador
Descripción
En el módulo de accionamiento arg, el rectificador de la unidad
Descripción
de rectificación de la posición de unidad de accionamiento arg
En el Drive Module arg, el rectificador de la unidad rectificadora
presenta un cortocircuito.
de la posición de unidad de accionamiento arg presenta una
Consecuencias
tensión insuficiente.
No podrá realizar ninguna operación hasta haber corregido el
Consecuencias
fallo. El sistema pasa al estado Motors OFF.
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado Motors OFF.
Causas probables
Los cables de rectificador de una unidad de accionamiento
Causas probables
adicional están dañados o mal conectados. Error interno en la
Nivel de tensión de CA bajo en la entrada del rectificador. Puede
unidad de rectificación o la unidad de accionamiento.
deberse a un fallo de la resistencia de control de inrush de
rectificador. Existe un cortocircuito en el rectificador.
Acciones recomendadas
Compruebe los cables de rectificador y sus conectores.
Acciones recomendadas
Reinicie el sistema e inténtelo de nuevo. Compruebe la tensión
de alimentación entrante. Compruebe todos los componentes
Continúa en la página siguiente
182
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
34266, Limitación de inrush de rectificador y
drenaje activados
34268, Error de carga del rectificador
Descripción
En el Drive Module arg, el rectificador de la unidad rectificadora
En el módulo de accionamiento arg con unidad de rectificación
de la posición de unidad de accionamiento arg presenta una
en la posición de unidad de accionamiento arg, la resistencia
tensión insuficiente.
de control de inrush está activada mientras también la
resistencia de frenado está activada.
Descripción
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
La resistencia de control de inrush se encuentra en la unidad
fallo. El sistema pasa al estado Motors OFF.
de rectificación.
La resistencia de drenaje está conectada a la unidad de
rectificador o a la unidad de accionamiento con rectificador
Causas probables
Nivel de tensión de CA bajo en la entrada del rectificador. Puede
deberse a un fallo de la resistencia de drenaje del rectificador.
incorporado.
La resistencia de drenaje o su cableado están defectuosos.
Consecuencias
Existe un cortocircuito en el rectificador.
El sistema pasa al estado Motors OFF para proteger el
Acciones recomendadas
hardware.
Reinicie el controlador e inténtelo de nuevo. Compruebe la
Causas probables
tensión de la entrada de alimentación. Si se trata de un sistema
Este problema es más probable si la tensión de la entrada de
alimentación es excesiva en el rectificador.
recién instalado con transformador de red, compruebe la
selección de tensión del transformador. Compruebe la
Acciones recomendadas
resistencia de drenaje y su cableado. Si el problema persiste,
Compruebe que la tensión de la entrada de alimentación cumpla
reemplace la unidad.
las especificaciones de la unidad de accionamiento. Compruebe
que esté seleccionada la tensión correcta con los puentes del
transformador (opcional).
34267, Demasiados rectificadores conectados
34300, Tipo desconocido de unidad de
accionamiento
Descripción
En el módulo de accionamiento arg, la unidad de accionamiento
Descripción
de la posición de unidad arg tiene una identidad de hardware
En el módulo de accionamiento arg, el sistema ha detectado
desconocida, arg.
más rectificadores de los que puede gestionar. El límite se
alcanzó al detectar la unidad de accionamiento de la posición
de unidad arg.
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado de fallo del sistema.
Consecuencias
Causas probables
No podrá realizar ninguna operación hasta haber corregido el
La unidad de accionamiento no se admite o está defectuosa.
fallo. El sistema pasa al estado de fallo del sistema.
Acciones recomendadas
Causas probables
Asegúrese de que la unidad de accionamiento sea admitida
Se ha conectado un número excesivo de unidades de
accionamiento dotadas de rectificadores.
por la versión de RobotWare. Actualice RobotWare en caso
necesario. Sustituya la unidad de accionamiento.
Acciones recomendadas
Verifique que haya conectado los tipos correctos de unidades
de accionamiento al enlace de comunicaciones para unidades
de accionamiento. Desconecte las unidades de accionamiento
no utilizadas.
34303, Aviso de intensidad de motor
Descripción
En el caso del eje arg, el controlador de intensidad detectó una
desviación de intensidad de par demasiado grande para el
motor. El eje está conectado al módulo de accionamiento arg
con la unidad de accionamiento de la posición de unidad arg
y el nodo arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
183
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Consecuencias
ningún error relativo al rectificador. Compruebe que la tensión
La operación será posible pero el sistema se acerca a un error
entrante se encuentre dentro de las especificaciones.
de paro.
Es posible que los datos de motor de los archivos de
34306, Error de temperatura de la unidad de
accionamiento
configuración sean incorrectos. Los cables del motor no están
Descripción
conectados correctamente o presentan daños. Cortocircuito
La unidad de accionamiento del eje arg ha alcanzado un nivel
en el cable de motor de fase a fase o de fase a tierra. La tensión
de temperatura excesivo. El eje está conectado al módulo de
del rectificador puede ser demasiado baja. La tensión de la
accionamiento arg con la unidad de accionamiento de la
entrada de alimentación no cumple las especificaciones.
posición de unidad arg y el nodo arg.
Acciones recomendadas
Consecuencias
Compruebe que los datos del motor en el archivo de
No podrá realizar ninguna operación hasta haber corregido el
configuración sean correctos para este eje. La forma de
fallo. El sistema pasa al estado Motors OFF.
Causas probables
comprobar el archivo de configuración se detalla en el Manual
de resolución de problemas. Compruebe que los cables del
motor no estén dañados ni mal conectados. Compruebe que
no existan cortocircuitos internos ni a tierra en los cables de
motor. Compruebe que el registro de eventos no contenga
ningún error relativo al rectificador. Compruebe que la tensión
entrante se encuentre dentro de las especificaciones.
34304, Aviso de intensidad de motor
Causas probables
Es posible que los ventiladores de refrigeración estén
defectuosos o que el flujo de aire esté obstruido. Las aletas de
refrigeración están cubiertas de polvo, lo que reduce el efecto
de enfriamiento. Es posible que la temperatura ambiente sea
excesiva. El eje puede estar funcionando con un par excesivo
durante periodos prolongados.
Acciones recomendadas
Compruebe que los ventiladores estén funcionando y que el
Descripción
flujo de aire no esté obstruido. Limpie las aletas de
En el caso del eje arg, el controlador de intensidad detectó una
desviación de intensidad demasiado grande para el motor. El
eje está conectado al módulo de accionamiento arg con la
unidad de accionamiento de la posición de unidad arg y el nodo
arg.
refrigeración. Compruebe que la temperatura ambiente no
sobrepase la temperatura nominal del armario. Si es posible,
escriba de nuevo el programa del usuario para reducir las
aceleraciones y deceleraciones bruscas. Reduzca el par estático
debido a la gravedad o fuerzas externas.
Consecuencias
de paro.
34307, Aviso de temperatura de la unidad de
accionamiento
Causas probables
Descripción
Es posible que los datos de motor de los archivos de
La unidad de accionamiento del eje arg se acerca a un nivel
configuración sean incorrectos. Los cables del motor no están
de temperatura excesivo. El eje está conectado al módulo de
conectados correctamente o presentan daños. Cortocircuito
accionamiento arg con la unidad de accionamiento de la
en el cable de motor de fase a fase o de fase a tierra. La tensión
posición de unidad arg y el nodo arg.
La operación será posible pero el sistema se acerca a un error
del rectificador puede ser demasiado baja. La tensión de la
entrada de alimentación no cumple las especificaciones.
Consecuencias
Es posible continuar, pero el margen hasta la temperatura
Acciones recomendadas
máxima permitida es demasiado estrecho para mantener el
Compruebe que los datos del motor en el archivo de
funcionamiento mucho tiempo.
configuración sean correctos para este eje. La forma de
comprobar el archivo de configuración se detalla en el Manual
de resolución de problemas. Compruebe que los cables del
motor no estén dañados ni mal conectados. Compruebe que
no existan cortocircuitos internos ni a tierra en los cables de
motor. Compruebe que el registro de eventos no contenga
Causas probables
Es posible que los ventiladores de refrigeración estén
defectuosos o que el flujo de aire esté obstruido. Las aletas de
refrigeración están cubiertas de polvo, lo que reduce el efecto
de enfriamiento. Es posible que la temperatura ambiente sea
Continúa en la página siguiente
184
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
excesiva. El eje puede estar funcionando con un par excesivo
Consecuencias
durante periodos prolongados.
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado Motors OFF.
Acciones recomendadas
Compruebe que los ventiladores estén funcionando y que el
Causas probables
flujo de aire no esté obstruido. Limpie las aletas de
La configuración del motor es incorrecta. Es posible que la
refrigeración. Compruebe que la temperatura ambiente no
carga del eje sea excesiva o que el motor se haya bloqueado
sobrepase la temperatura nominal del armario. Si es posible,
(quizá a causa de una colisión). Cortocircuito entre las fases
escriba de nuevo el programa del usuario para reducir las
del motor o a tierra.
aceleraciones y deceleraciones bruscas. Reduzca el par estático
debido a la gravedad o fuerzas externas.
Acciones recomendadas
Compruebe que la configuración del motor sea correcta.
Compruebe que el robot no haya colisionado. Si es posible,
34308, Error de temperatura crítica de la unidad
de accionamiento
reduzca la velocidad del programa de usuario. Compruebe que
Descripción
accionamiento. Compruebe el cable y el motor midiendo sus
La unidad de accionamiento del eje arg ha alcanzado un nivel
respectivas resistencias. Desconecte antes de la medición.
la carga del eje no sea excesiva para la unidad de
de temperatura crítico. El eje está conectado al módulo de
posición de unidad arg y el nodo arg.
34311, Aviso de unidad de accionamiento
saturada
Consecuencias
Descripción
No podrá realizar ninguna operación hasta haber corregido el
La unidad de accionamiento del eje arg ha alcanzado la tensión
fallo. El sistema pasa al estado Motors OFF con par cero.
máxima de salida. El eje está conectado al sistema de
accionamiento arg con la unidad de accionamiento de la
accionamiento arg con la unidad de accionamiento de la
Causas probables
Es posible que los ventiladores de refrigeración estén
posición de unidad arg y el nodo arg.
defectuosos o que el flujo de aire esté obstruido. Las aletas de
Consecuencias
refrigeración están cubiertas de polvo, lo que reduce el efecto
La operación será posible pero el sistema se acerca a un error
de enfriamiento. Es posible que la temperatura ambiente sea
de paro.
excesiva. El eje puede estar funcionando con un par excesivo
durante periodos prolongados.
Causas probables
El motor no está conectado correctamente a la unidad de
Acciones recomendadas
accionamiento. Los datos del motor en la configuración no son
Compruebe que los ventiladores estén funcionando y que el
correctos. La tensión del rectificador es demasiado baja.
flujo de aire no esté obstruido. Limpie las aletas de
Cortocircuito entre las fases del motor o a tierra.
refrigeración. Compruebe que la temperatura ambiente no
sobrepase la temperatura nominal del armario. Si es posible,
escriba de nuevo el programa del usuario para reducir las
aceleraciones y deceleraciones bruscas. Reduzca el par estático
debido a la gravedad o fuerzas externas.
Acciones recomendadas
Compruebe los cables y conectores del motor. Compruebe la
configuración de los parámetros del motor. Compruebe si
existen otros mensajes en el registro de eventos de hardware.
Compruebe la tensión de la entrada a la unidad rectificadora y
ajuste el valor mínimo de tolerancia de la red. Compruebe el
34309, Intensidad demasiado elevada en el
transistor de accionamiento
cable y el motor midiendo sus respectivas resistencias.
Desconecte antes de la medición.
Descripción
La intensidad del transistor de la unidad de accionamiento es
excesiva en el eje arg. El eje está conectado al módulo de
accionamiento arg con la unidad de accionamiento de la
posición de unidad arg y el nodo arg.
34312, Falta una unidad de accionamiento
Descripción
En el caso del eje arg, el sistema no puede encontrar ninguna
unidad de accionamiento configurada. El eje está configurado
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
185
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
para el módulo de accionamiento arg con la unidad de
accionamiento de la posición de unidad arg.
34314, Falta un nodo de unidad de accionamiento
Descripción
Consecuencias
En el caso del eje arg, la unidad de accionamiento no admite
El sistema pasa al estado de fallo del sistema.
el número de nodo configurado. El eje está configurado para
Causas probables
el módulo de accionamiento arg con la unidad de accionamiento
Hay un eje configurado pero no se encuentra la unidad de
de la posición de unidad arg y el nodo arg.
accionamiento.
Consecuencias
Acciones recomendadas
El sistema pasa al estado de fallo del sistema.
Verifique que el módulo de accionamiento contenga la unidad
Causas probables
de accionamiento del eje configurado. Verifique que la
El nodo configurado para la unidad de accionamiento no se
configuración de la posición de la unidad de accionamiento
admite para el tipo configurado de unidad de accionamiento.
sea correcta. Verifique que los cables existentes entre las
unidades de accionamiento estén insertados correctamente
en la posición de conector correcta. Si el cable está conectado
correctamente, es posible que esté dañado y que sea necesario
sustituirlo. Consulte el registro de eventos para comprobar si
existen mensajes de error acerca de la unidad de alimentación.
Acciones recomendadas
Compruebe el número de nodo de la unidad de accionamiento
en la configuración.
34316, Error de intensidad de motor
Compruebe el cableado entre la unidad de alimentación y la
Descripción
unidad de accionamiento. Compruebe la salida de 24 V desde
En el caso del eje arg, el controlador de intensidad detectó una
la unidad de alimentación.
desviación de intensidad de par demasiado grande para el
motor. El eje está conectado al sistema de accionamiento arg
34313, Tipo incorrecto de unidad de
accionamiento
con la unidad de accionamiento de la posición de unidad arg
Descripción
Consecuencias
En el módulo de accionamiento arg, la identidad de hardware
El sistema pasa al estado Motors OFF.
de la unidad de accionamiento de la posición de unidad arg es
Causas probables
diferente de la especificada en la configuración. La identidad
Es posible que los datos de motor de los archivos de
de hardware de la unidad de accionamiento instalada es arg y
configuración sean incorrectos. Los cables del motor no están
la identidad configurada es arg.
conectados correctamente o presentan daños. Cortocircuito
Consecuencias
en el cable de motor de fase a fase o de fase a tierra. La tensión
No podrá realizar ninguna operación hasta haber corregido el
del rectificador puede ser demasiado baja. La tensión de la
fallo. El sistema pasa al estado de fallo del sistema.
entrada de alimentación no cumple las especificaciones.
Causas probables
Acciones recomendadas
El tipo de unidad de accionamiento no se corresponde con el
Compruebe que los datos del motor en el archivo de
especificado en la key de la instalación.
configuración sean correctos para este eje. La forma de
y el nodo arg.
comprobar el archivo de configuración se detalla en el Manual
Acciones recomendadas
Compruebe que la posición de unidad de accionamiento sea
correcta, es decir, que los cables de Ethernet estén conectados
correctamente. Verifique que la clave del sistema de
accionamiento coincida con el hardware instalado. Sustituya
la unidad de accionamiento con la especificada en la clave del
sistema de accionamiento.
de resolución de problemas. Compruebe que los cables del
motor no estén dañados ni mal conectados. Compruebe que
no existan cortocircuitos internos ni a tierra en los cables de
motor. Compruebe que el registro de eventos no contenga
ningún error relativo al rectificador. Compruebe que la tensión
entrante se encuentre dentro de las especificaciones. Cambie
el mínimo de tolerancia de red para que se corresponda con
la tensión de red real.
Continúa en la página siguiente
186
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
34317, Error de intensidad de motor
existen otros mensajes en el registro de eventos de hardware.
Compruebe la tensión de la entrada a la unidad de rectificación.
Descripción
En el caso del eje arg, el controlador de intensidad detectó una
desviación de intensidad demasiado grande para el motor. El
eje está conectado al Drive Module arg con la unidad de
accionamiento de la posición de unidad arg y el nodo arg.
Compruebe el cable y el motor midiendo sus respectivas
resistencias. Desconecte antes de la medición.
34319, Error crítico de la unidad de
accionamiento
Consecuencias
El sistema pasa al estado Motors OFF.
Descripción
La unidad de accionamiento del eje arg genera un error no
Causas probables
especificado pero es probable que se deba a una
Es posible que los datos de motor de los archivos de
configuración sean incorrectos. Los cables del motor no están
conectados correctamente o presentan daños. Cortocircuito
sobretemperatura o cortocircuito. El eje está conectado al
módulo de accionamiento arg con la unidad de accionamiento
de la posición de unidad arg y el nodo arg.
en el cable de motor de fase a fase o de fase a tierra. La tensión
del rectificador puede ser demasiado baja. La tensión de la
entrada de alimentación no cumple las especificaciones.
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado Motors OFF con par cero.
Acciones recomendadas
Compruebe que los datos del motor en el archivo de
configuración sean correctos para este eje. La forma de
comprobar el archivo de configuración se detalla en el Manual
de resolución de problemas. Compruebe que los cables del
motor no estén dañados ni mal conectados. Compruebe que
no existan cortocircuitos internos ni a tierra en los cables de
motor. Compruebe que el registro de eventos no contenga
ningún error relativo al rectificador. Compruebe que la tensión
entrante se encuentre dentro de las especificaciones. Cambie
Causas probables
Es posible que los ventiladores de refrigeración estén
defectuosos o que el flujo de aire esté obstruido. Las aletas de
refrigeración están cubiertas de polvo, lo que reduce el efecto
de enfriamiento. Es posible que la temperatura ambiente sea
excesiva. El eje puede estar funcionando con un par excesivo
durante periodos prolongados. Cortocircuito en los cables o
conectores entre las fases o a tierra. Cortocircuito en el motor
entre las fases o a tierra.
el mínimo de tolerancia de red para que se corresponda con
Acciones recomendadas
la tensión de red real.
Compruebe que los ventiladores estén funcionando y que el
flujo de aire no esté obstruido. Limpie las aletas de
34318, Error de inversor de accionamiento
saturado
refrigeración. Compruebe que la temperatura ambiente no
sobrepase la temperatura nominal del armario. Si es posible,
escriba de nuevo el programa del usuario para reducir las
Descripción
La unidad de accionamiento del eje arg ha alcanzado la tensión
máxima de salida. El eje está conectado al módulo de
accionamiento arg con la unidad de accionamiento de la
posición de unidad arg y el nodo arg.
Consecuencias
aceleraciones y deceleraciones bruscas. Reduzca el par estático
debido a la gravedad o fuerzas externas. Compruebe/sustituya
los cables y conectores. Compruebe/sustituya el motor.
34320, Demasiados nodos de accionamiento
conectados
El sistema pasa al estado Motors OFF.
Descripción
Causas probables
En el Drive Module arg, el sistema ha detectado más nodos de
El motor no está conectado correctamente a la unidad de
accionamiento. Los datos del motor en la configuración no son
correctos. La tensión del rectificador es demasiado baja.
accionamiento de los que puede gestionar el sistema. El error
se produjo al detectar la unidad de accionamiento de la posición
de unidad arg.
Cortocircuito entre las fases del motor o a tierra.
Consecuencias
Acciones recomendadas
No podrá realizar ninguna operación hasta haber corregido el
Compruebe los cables y conectores del motor. Compruebe la
fallo. El sistema pasa al estado de fallo del sistema.
configuración de los parámetros del motor. Compruebe si
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
187
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Causas probables
inversor. No debe existir ningún otro rectificador con la posición
Demasiadas unidades de accionamiento conectadas al enlace
de unidad entre el rectificador configurado y la unidad de
de comunicaciones de la unidad de accionamiento. Las
accionamiento.
unidades de accionamiento conectadas pueden ser de los tipos
incorrectos y pueden estar equipadas con demasiados nodos
de accionamiento.
Acciones recomendadas
Compruebe que el archivo de configuración del eje adicional
sea del tipo Drive System 09. Cambie el rectificador utilizado
Acciones recomendadas
en la configuración del eje adicional. Retire el rectificador no
Verifique que haya conectado los tipos correctos de unidad de
utilizado montado entre el rectificador configurado y la unidad
accionamiento al enlace de comunicaciones para unidades de
de accionamiento.
accionamiento. Desconecte las unidades de accionamiento no
34400, Tensión excesiva en el rectificador
utilizadas.
34321, Error de configuración del sistema de
accionamiento
Descripción
Descripción
En el módulo de accionamiento arg, la unidad de accionamiento
de la posición de unidad arg presenta una tensión de
rectificador excesiva.
En el sistema de accionamiento arg, la unidad de accionamiento
de la posición arg presenta un error de configuración debido
a una discrepancia entre la unidad de accionamiento y el
sistema de medida. La unidad de accionamiento sólo admite
los ejes arg que tengan la misma excitación del sistema de
medida. El error se ha producido al añadir el eje arg al sistema.
Consecuencias
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado Motors OFF.
AVISO DE ALTA TENSIÓN: EL RECTIFICADOR PUEDE
DESCARGARSE MUY LENTAMENTE (APROXIMADAMENTE
EN 1 HORA) AL APAGAR EL SISTEMA.
Causas probables
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado de fallo del sistema.
La resistencia de drenaje no está conectada o está defectuosa.
Es posible que el programa del usuario contenga una
Causas probables
deceleración excesiva de los ejes del manipulador. Este fallo
Demasiados ejes están usando la misma excitación del sistema
es más probable si el sistema contiene ejes adicionales.
de medida y todos están utilizando la mimsa unidad de
accionamiento.
Acciones recomendadas
AVISO: PUEDE EXISTIR ALTA TENSIÓN. Asegúrese de que
Acciones recomendadas
el cable de la resistencia de drenaje esté conectado
Mueva el eje arg u otro eje con la misma excitación de nodo a
correctamente a la unidad de rectificación. Desconecte la
la otra excitación (EXC1 - EXC2), mediante un cambio de la
resistencia de drenaje y compruebe el cable y mida la
conexión del nodo del sisrtema de medida de los ejes, tanto
resistencia de drenaje. La resistencia esperada debe ser de
en el hardware como en la configuración. Reinicie el sistema.
aproximadamente arg ohmios. Escriba de nuevo el programa
del usuario para reducir la utilización de deceleraciones
34322, Error de configuración de unidad de
accionamiento
Descripción
En el módulo de accionamiento arg, la unidad de accionamiento
de la posición arg utiliza un rectificador incorrecto.
bruscas.
34401, Aviso de tensión demasiado baja en el
rectificador
Descripción
En el sistema de accionamiento arg, la unidad de accionamiento
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado de fallo del sistema.
de la posición de unidad arg presenta una tensión de
rectificador cercana al límite mínimo.
Consecuencias
Causas probables
Una unidad de accionamiento debe configurar siempre un
rectificador con una posición de unidad inferior o igual a la del
La operación será posible pero el sistema se acerca a un error
de paro.
Continúa en la página siguiente
188
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Causas probables
AVISO DE ALTA TENSIÓN: EL RECTIFICADOR PUEDE
La tensión de la entrada de alimentación a la unidad
DESCARGARSE MUY LENTAMENTE (APROXIMADAMENTE
rectificadora no cumple las especificaciones.
EN 1 HORA) AL APAGAR EL SISTEMA.
Acciones recomendadas
Causas probables
Compruebe si el registro de eventos de hardware contiene
La resistencia de drenaje no está conectada o está defectuosa.
otros mensajes relativos a problemas de tensión en la
Es posible que el programa del usuario contenga una
alimentación. Compruebe la tensión de red entrante. Cambie
deceleración excesiva de los ejes del manipulador. Este fallo
el mínimo de tolerancia de red para que la tensión de red esté
es más probable si el sistema contiene ejes adicionales.
dentro del intervalo especificado. Compruebe que esté
seleccionada la tensión correcta mediante los puentes del
transformador (opcional). Compruebe todos los componentes
trifásicos internos (interruptor principal, filtro de red, fusible,
contactores) y el cableado del sisteam de accionamiento.
Acciones recomendadas
AVISO: PUEDE EXISTIR ALTA TENSIÓN. Asegúrese de que
el cable de la resistencia de drenaje esté conectado
correctamente a la unidad de rectificación. Desconecte la
resistencia de drenaje y compruebe el cable y mida la
resistencia de drenaje. La resistencia esperada debe ser de
34402, Tensión demasiado baja en el rectificador
aproximadamente arg ohmios. Escriba de nuevo el programa
Descripción
del usuario para reducir la utilización de deceleraciones
En el sistema de accionamiento arg, la tensión del rectificador
bruscas.
es demasiado baja para la unidad de accionamiento de la
34405, Aviso de tensión excesiva en el
rectificador
posición de unidad arg.
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
Descripción
fallo. El sistema pasa al estado Motors OFF.
En el módulo de accionamiento arg, la unidad de accionamiento
de la posición de unidad arg presenta una tensión de
Causas probables
La tensión de la entrada de alimentación a la unidad
rectificadora no cumple las especificaciones.
rectificador que se acerca al límite máximo.
Consecuencias
La operación será posible pero el sistema se acerca a un error
Acciones recomendadas
Compruebe si el registro de eventos de hardware contiene
otros mensajes relativos a problemas de tensión en la
alimentación. Compruebe la tensión de red entrante. Cambie
el mínimo de tolerancia de red para que la tensión de red esté
de paro.
AVISO DE ALTA TENSIÓN: EL RECTIFICADOR PUEDE
DESCARGARSE MUY LENTAMENTE (APROXIMADAMENTE
EN 1 HORA) AL APAGAR EL SISTEMA.
dentro del intervalo especificado. Compruebe que esté
Causas probables
seleccionada la tensión correcta mediante los puentes del
La resistencia de drenaje no está conectada o está defectuosa.
transformador (opcional). Compruebe todos los componentes
Es posible que el programa del usuario contenga una
trifásicos internos (interruptor principal, filtro de red, fusible,
deceleración excesiva de los ejes del manipulador. Este fallo
contactores) y el cableado del sistema de accionamiento.
es más probable si el sistema contiene ejes adicionales.
Acciones recomendadas
34404, Tensión en el rectificador excesiva a un
nivel crítico
AVISO: PUEDE EXISTIR ALTA TENSIÓN. Asegúrese de que
Descripción
correctamente a la unidad de rectificación. Desconecte la
En el módulo de accionamiento arg, la unidad de accionamiento
resistencia de drenaje y compruebe el cable y mida la
de la posición de unidad arg presenta una tensión de
resistencia de drenaje. La resistencia esperada debe ser de
rectificador excesiva a un nivel crítico.
aproximadamente arg ohmios. Escriba de nuevo el programa
el cable de la resistencia de drenaje esté conectado
del usuario para reducir la utilización de deceleraciones
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
bruscas.
fallo. El sistema pasa al estado Motors OFF con par cero.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
189
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
34406, Error de alimentación de la unidad de
accionamiento
Acciones recomendadas
Pruebe de nuevo reiniciando el sistema con el interruptor de
alimentación principal. Sustituya la unidad de accionamiento
Descripción
En el módulo de accionamiento arg, la unidad de accionamiento
de la posición de unidad arg ha detectado un problema con la
potencia de lógica.
defectuosa.
34409, Error de puesta en marcha de la unidad
de accionamiento
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado Motors OFF con par cero.
Descripción
El sistema no ha podido completar la fase de inicialización de
una unidad de accionamiento. La unidad de accionamiento está
Causas probables
situada en el módulo de accionamiento arg de la posición de
La alimentación de lógica de 24 V al accionamiento se pierde
unidad arg.
temporal o permanentemente.
Consecuencias
Acciones recomendadas
El sistema pasa al estado de fallo del sistema.
Compruebe si el registro de eventos contiene mensajes de
error de las unidades de alimentación. Compruebe los cables
que unen la unidad de fuente de alimentación a la unidad de
accionamiento. Compruebe la salida de 24 V de la unidad de
Causas probables
El sistema no ha podido completar la fase de inicialización de
la unidad de accionamiento.
Acciones recomendadas
alimentación.
Pruebe de nuevo reiniciando el sistema con el interruptor de
34407, Error interno de la unidad de
accionamiento
Descripción
En el módulo de accionamiento arg, la unidad de accionamiento
de la posición de unidad arg ha indicado un error interno.
alimentación principal. Compruebe si existen otros mensajes
en el registro de eventos de hardware.
34410, Demasiadas unidades de accionamiento
conectadas
Descripción
Consecuencias
El sistema pasa al estado de fallo de sistema con par cero.
En el módulo de accionamiento arg, el sistema ha detectado
más unidades de accionamiento de las que puede gestionar el
Causas probables
sistema. El número máximo de unidades de accionamiento
Se ha producido un error interno en el firmware de la unidad
admitidas es de arg, pero se detectaron arg.
de accionamiento.
Consecuencias
Acciones recomendadas
No podrá realizar ninguna operación hasta haber corregido el
Reinicie el sistema con el interruptor de alimentación principal.
34408, Error de datos de hardware de unidad de
accionamiento
fallo. El sistema pasa al estado de fallo del sistema.
Causas probables
Se ha conectado un número excesivo de unidades de
accionamiento.
Descripción
En el módulo de accionamiento arg, la unidad de accionamiento
de la posición de unidad arg contiene datos dañados sobre las
unidades de accionamiento.
Acciones recomendadas
Desconecte las unidades de accionamiento no utilizadas.
34411, Error del rectificador
Consecuencias
El sistema pasa al estado de fallo del sistema.
Descripción
El sistema ha detectado una tensión baja en la linea de CC en
Causas probables
una unidad de accionamiento que no es utilizada por ningún
Ha fallado la comprobación de integridad de la información
almacenada en la unidad de accionamiento sobre las unidades
eje. La unidad de accionamiento está situada en el Sistema de
accionamiento arg de la posición de unidad arg.
de accionamiento.
Continúa en la página siguiente
190
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Consecuencias
este fallo puede producirse en combinación con otros fallos,
No podrá realizar ninguna operación hasta haber corregido el
en cuyo caso los encontrará en el registro de errores.
fallo. El sistema pasa al estado Motors OFF.
Acciones recomendadas
Causas probables
Para reanudar el funcionamiento normal, confirme en primer
Falta la red entrante. El cable de CC está conectado de forma
lugar el error, libere el dispositivo de habilitación y presiónelo
defectuosa a la unidad de accionamiento. Cortocircuito en la
de nuevo después de aproximadamente un segundo.
linea de CC. Puede existir tanto dentro de la unidad de
Compruebe los cables y conexiones del Sistema de Seguridad.
accionamiento como en los cables.
Compruebe otros mensajes del registro de errores que se hayan
producido al mismo tiempo para determinar la causa.
Acciones recomendadas
Compruebe la alimentación entrante. Compruebe el cableado
de CC. Compruebe si hay cualquier cortocircuito. Sustituya las
Compruebe la configuración de movimientos del sistema en
relación con el relé Motors ON. La forma de comprobar el
archivo de configuración se detalla en el Manual de resolución
unidades de accionamiento.
de problemas. Aviso: No se permite seguir usando el robot
34423, Tipos de unidades de accionamiento
incompatibles
hasta haber encontrado y eliminado el fallo.
37043, Señales de seguridad sobrecargadas
Descripción
El sistema de accionamiento configurado en el Drive Module
arg contiene tipos de unidades de accionamiento incompatibles.
Descripción
Las señales AC_ON o SPEED tienen una intensidad excesiva.
Consecuencias
Consecuencias
El sistema pasa al estado de fallo del sistema.
El sistema de seguridad desactiva las señales, lo que hace que
el sistema pase al estado de fallo del sistema (en el caso de
Causas probables
AC_ON) o al estado SYS HALT (en el caso de SPEED).
Las unidades de accionamiento del tipo DSQC462 no son
compatibles con ningún otro tipo de unidad de accionamiento
y no pueden usarse en el mismo Drive Module.
Causas probables
Es posible que una carga conectada al circuito sea excesiva o
que el sistema de seguridad no funcione correctamente.
Acciones recomendadas
¡Consulte el diagrama de circuitos!
Compruebe la configuración para asegurarse de que solo se
utilizan tipos de unidades de accionamiento compatibles dentro
Acciones recomendadas
Compruebe todas las cargas conectadas a los circuitos AC_ON
del mismo Drive Module.
y SPEED. Compruebe el cableado y los conectores del sistema
37001, Error de activación del contactor Motors
ON
de seguridad y sustituya todas las unidades defectuosas en
Descripción
37044, Sobrecarga de las señales digitales de
salida de la tarjeta de panel
El contactor Motors ON arg del Drive Module arg no pudo
caso necesario.
cerrarse cuando se le ordenó.
Descripción
Consecuencias
Las salidas digitales de usuario de la tarjeta de panel consumen
La unidad mecánica no puede funcionar ni en modo manual ni
una intensidad excesiva.
automático.
Consecuencias
Causas probables
La tarjeta de panel desactiva las señales, lo que hace que el
La cadena de funcionamiento del contactor está abierta. Hay
sistema pase al estado SYSHALT.
problemas en el propio contactor, ya sean de tipo mecánico o
eléctrico. Es posible que se haya accionado el dispositivo de
habilitación del FlexPendant con demasiada rapidez o que el
sistema no esté configurado correctamente. En raras ocasiones,
Causas probables
Es posible que una carga conectada al circuito sea excesiva o
que la tarjeta de panel no funcione correctamente. ¡Consulte
el diagrama de circuitos!
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
191
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Acciones recomendadas
Causas probables
Compruebe todas las cargas que tenga conectadas a las salidas
Es posible que el contactor de activación configurado en el
digitales de usuario. Compruebe el cableado y los conectores
sistema sea defectuoso o que el sistema no esté configurado
de la tarjeta de panel y sustituya todas las unidades defectuosas
correctamente.
en caso necesario.
Acciones recomendadas
Compruebe el contactor y asegúrese de que sus conexiones
37045, Ventilador del ordenador externo
defectuoso
estén bien conectadas. Compruebe la configuración de
Descripción
activación. La forma de comprobar el archivo de configuración
La velocidad de giro del ventilador del ordenador externo del
se detalla en el capitulo de resolución de problemas.
movimientos del sistema en relación con el contactor de
módulo de control es insuficiente.
Consecuencias
No tiene consecuencias en el sistema. La temperatura del
módulo de control aumentará.
37050, Temperatura excesiva en el ordenador
principal
Descripción
La temperatura de la unidad de ordenador principal o del
Causas probables
Ventilador, cableado o fuente de alimentación en mal estado.
¡Consulte el diagrama de circuitos!
procesador del ordenador principal es excesiva.
Consecuencias
El sistema podría sufrir daños.
Acciones recomendadas
Compruebe los cables que van al ventilador del ordenador
Causas probables
externo. Compruebe el ventilador y sustituya cualquier unidad
Es posible que la unidad esté sobrecargada, que sus
defectuosa en caso necesario.
ventiladores no funcionen correctamente o que el flujo de aire
esté obstruido.
37046, Señales de seguridad sobrecargadas
Acciones recomendadas
Descripción
Asegúrese de que los ventiladores estén funcionando.
La alimentación de 24 V PANEL tiene una intensidad excesiva.
Compruebe que el flujo de aire hacia los ventiladores de la
unidad no esté obstruido.
Consecuencias
El sistema de seguridad desactiva la señal, lo que hace que el
sistema pase al estado SYSHALT.
37053, Compruebe el nivel de tensión de la
batería de la CMOS
Causas probables
Es posible que una carga conectada al circuito sea excesiva o
que la unidad de sistema de seguridad no funcione
correctamente. ¡Consulte los esquemas de los circuitos!
Descripción
Es posible que la batería de la CMOS de la placa de ordenador
esté descargada.
Consecuencias
Acciones recomendadas
Compruebe todas las cargas conectadas al circuito de 24 V
PANEL. Compruebe los cables del sistema de seguridad.
Una vez reiniciado el sistema, se restablecerá la hora del
sistema.
El sistema utilizará también una configuración errónea o no
37049, Error de activación de contactor de
activación
será posible reiniciar el sistema.
Causas probables
La hora del sistema nunca se ha configurado. La batería de la
Descripción
El contactor de activación de la unidad mecánica arg no se
CMOS está defectuosa/descargada.
Acciones recomendadas
cerró.
Configure la hora del sistema, reinicie el sistema con el
Consecuencias
La unidad mecánica no puede funcionar de forma manual o
automática.
interruptor de alimentación y compruebe si se informa de nuevo
de este registro de errores. Si se informa de nuevo de este
Continúa en la página siguiente
192
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
error, reemplace la batería de la CMOS y configure la hora del
sistema.
37054, Ventilador de la unidad de ordenadores
en mal estado
Descripción
37069, Unidad de alimentación del backup en
mal estado
Descripción
El banco de energía de backup del módulo de Control, que
suministra la tensión de backup, se encuentra en mal estado.
Consecuencias
La velocidad de giro de los ventiladores de la unidad de
ordenadores es insuficiente.
Tras el apagado, no se guarda ningún cambio realizado en los
datos, a no ser que se haya ejecutado primero "Apagar
Consecuencias
computador principal".
No tiene consecuencias en el sistema. La temperatura de la
unidad de ordenadores aumentará.
Causas probables
Puede deberse a fallos en el banco de energía de backup, el
Causas probables
cableado o el cargador.
Ventilador, cableado o fuente de alimentación en mal estado.
¡Consulte el diagrama de circuitos!
Acciones recomendadas
¡Ejecute "Apagar ordenador principal" antes de apagar la
Acciones recomendadas
alimentación principal o espere hasta que la batería se haya
Compruebe el cableado del ventilador de la unidad de
cargado! Compruebe el cable y los conectores del banco de
ordenadores. Compruebe el ventilador. Compruebe la
energía de backup. Compruebe el banco de energía de backup.
alimentación del ventilador. Sustituya el componente defectuoso
Compruebe la fuente de alimentación. Sustituya la unidad
si es necesario.
defectuosa en caso necesario.
37056, Fallo de ventilador de refrigeración
37070, Temperatura excesiva en la fuente de
alimentación del módulo de control
Descripción
El ventilador de la unidad de refrigeración se ha detenido o gira
Descripción
a muy baja velocidad (inferior a las arg rpm).
La temperatura de la fuente de alimentación del módulo de
control es excesiva.
Acciones recomendadas
Compruebe los cables del ventilador. Sustituya el ventilador.
Consecuencias
El sistema se apaga inmediatamente.
37062, Aviso de alimentación del módulo de
ordenadores
Causas probables
Descripción
excesiva de la fuente de alimentación o un suministro eléctrico
La tensión de arg V de la alimentación del módulo de
defectuoso.
ordenadores es de arg V, fuera del rango permitido.
Acciones recomendadas
Consecuencias
Compruebe el ventilador de refrigeración. Compruebe la
Puede deberse a una refrigeración deficiente, una carga
potencia de salida. Sustituya la unidad defectuosa si es
Causas probables
La unidad de alimentación, el cableado, la tensión de entrada
a la fuente de alimentación o la carga de salida pueden ser las
causas del nivel de tensión defectuoso. ¡Consulte el Manual
de solución de problemas y el diagrama de circuitos!
necesario.
37074, Presión de purga insuficiente
Descripción
Hay un número de sistema de purga arg asociado a la tarjeta
Acciones recomendadas
Compruebe todos los cables de la unidad de alimentación.
de interfaz de manipulador (MIB) arg.
Mida los niveles de tensión de salida y entrada. Sustituya la
Acciones recomendadas
unidad defectuosa en caso necesario.
Compruebe la alimentación del aire de purga y busque fugas
en: La unidad de purga. La manguera flexible. El propio
manipulador.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
193
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
37075, Presión de purga excesiva
Acciones recomendadas
Compruebe que la clave de tiempo de purga esté insertada
Descripción
Hay un número de sistema de purga arg asociado a la tarjeta
de interfaz de manipulador (MIB) arg.
correctamente. Sustituya la clave de tiempo de purga.
37081, Diferencias en tiempos de purga
Acciones recomendadas
Compruebe la unidad de purga y el suministro de aire.
Descripción
Existe una divergencia inaceptable entre el firmware de CPLD
37076, Caudal de purga inesperadamente bajo
y FPGA en los temporizadores de purga de la tarjeta de interfaz
de manipulador (MIB) arg.
Descripción
Hay un número de sistema de purga arg asociado a la tarjeta
de interfaz de manipulador (MIB) arg.
Consecuencias
El temporizador de purga se reinicia.
Acciones recomendadas
Acciones recomendadas
Compruebe la unidad de purga y el suministro de aire.
Compruebe si hay fugas en el sistema de purga.
37077, Caudal de purga inesperadamente alto
Sustituya la tarjeta MIB si está defectuosa.
37082, Divergencia entre salidas de PIB y MIB
Descripción
Las tarjetas de interfaz de proceso (PIB) y de interfaz de
Descripción
Hay un número de sistema de purga arg asociado a la tarjeta
de interfaz de manipulador (MIB) arg.
manipulador (MIB) arg no coinciden en cuanto al estado de
salida del relé de purga y el relé de alimentación.
Consecuencias
Acciones recomendadas
Compruebe la unidad de purga y el suministro de aire.
37078, Diferencias en tiempos de purga
Descripción
Divergencia inaceptable entre los temporizadores de purga de
la tarjeta de interfaz de proceso (PIB) y la tarjeta de interfaz de
manipulador (MIB) arg.
La secuencia de purga se reinicia.
37083, El sensor de purga ha detectado un fallo
de presión
Descripción
Fallo de purga detectado por la tarjeta de interfaz de
manipulador (MIB) arg. El sistema de purga ha detectado una
presión inadecuada en los sensores. Los motores y equipos
Consecuencias
de pintura se han desconectado y el ordenador principal puede
El temporizador de purga se reinicia.
ser informado de que debe desconectar la unidad de medida
Acciones recomendadas
serie (SMU). Depende de la temporización de las señales
Compruebe los cables de la interfaz de periféricos serie (SPI).
Consecuencias
Sustituya la tarjeta MIB si está defectuosa. Sustituya la tarjeta
Los motores y equipos de pintura están desactivados, la cadena
PIB si está defectuosa.
de RUN se ha abierto y quizá también se haya desconectado
la SMU.
37080, Configuración de purga no válida.
Acciones recomendadas
Descripción
Compruebe la alimentación de aire. Compruebe que la salida
La clave de tiempo de purga de la tarjeta de interfaz de
de aire no está bloqueada. Compruebe los sensores de purga
manipulador (MIB) arg X19 no es válida.
y el cableado de los sensores de purga.
Consecuencias
Se utilizará el tiempo predeterminado (300 s).
37090, Temperatura excesiva, sensor arg
Causas probables
Descripción
Clave de tiempo de purga defectuosa o no encontrada.
Sobrecalentamiento del sistema detectado en la tarjeta
Manipulator Controller Board (MCOB) arg. Sensores 1 a 7:
Continúa en la página siguiente
194
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
motor 1 a 7, sensor 8: Tarjeta de medida serie. La cadena de
Acciones recomendadas
funcionamiento se ha abierto.
Compruebe si hay un cortocircuito en los frenos.
Acciones recomendadas
Espere hasta que el motor o equipo sobrecalentado se haya
37098, Fallo de circuito de frenos abierto
enfriado.
Descripción
La supervisión de frenos de la tarjeta Manipulator Controller
37094, Error de activación de conexión
Board (MCOB/MCB) arg ha detectado un circuito abierto en el
eje arg y ha ACTIVADO todos los frenos.
Descripción
Imposible activar arg. La entrada de relé de conexión arg indica
Acciones recomendadas
que no hay ninguna conexión.
Compruebe si hay un circuito abierto en los frenos.
Acciones recomendadas
Compruebe si la unidad mecánica está conectada. Compruebe
37099, Temperatura excesiva, sensor arg
la configuración de la señal de entrada de relé de conexión.
Descripción
Sobrecalentamiento del sistema detectado en la tarjeta
37095, Fallo de alimentación de frenos
Manipulator Controller Board (MCOB/MCB) arg. Sensores
supervisados en los motores, la unidad de medida serie (SMU)
Descripción
La supervisión de la alimentación de los frenos en la tarjeta
Manipulator Controller Board (MCOB) arg ha detectado un fallo
en la señal de alimentación y activó todos los frenos.
o el equipo de proceso. La cadena de funcionamiento se ha
abierto.
Sensores 1 a 8: Motores de robot 1 a 8. Sensor 9: SMU.
Sensores 10 a 14: Proceso 1 a 5. Consulte la configuración
Acciones recomendadas
actual del robot para obtener más detalles.
Compruebe la alimentación de los frenos en la tarjeta MCOB.
Compruebe el relé de alimentación de los frenos del armario.
Compruebe si hay perturbaciones en la señal de alimentación
de frenos de la tarjeta MCOB. Compruebe si hay un cortocircuito
Acciones recomendadas
Espere hasta que el motor o equipo sobrecalentado se haya
enfriado.
en los frenos.
37100, Error de disco flash de nodo de E/S
37096, Fallo de alimentación de frenos
Descripción
Nombre de flash: arg
Descripción
La supervisión de la alimentación de los frenos en la tarjeta
Manipulator Controller Board (MCOB/MCB) arg ha detectado
un fallo en la señal de alimentación y activó todos los frenos.
Función de disco flash: arg
Descripción del error: arg
Acciones recomendadas
Informe del error.
Acciones recomendadas
Compruebe la alimentación de los frenos en la tarjeta
MCOB/MCB. Compruebe la alimentación de los frenos en la
37101, Fallo de frenos
alimentación del armario. Compruebe si hay perturbaciones
Descripción
en la señal de alimentación de frenos de la tarjeta MCOB/MCB.
Los frenos de la unidad mecánica arg no se accionan
Compruebe si hay un cortocircuito en los frenos.
correctamente.
37097, Fallo de cortocircuito de frenos
Descripción
Consecuencias
La unidad mecánica puede caer al desconectar los motores.
Causas probables
La supervisión de frenos de la tarjeta Manipulator Controller
Board (MCOB/MCB) arg ha detectado un cortocircuito en el eje
arg y ha ACTIVADO todos los frenos.
Es posible que la configuración del contactor de frenos sea
incorrecta o que el contactor esta defectuoso. Si se utiliza un
contactor de frenos externo, es necesario definirlo
correctamente en el archivo de configuración del movimiento.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
195
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Acciones recomendadas
Compruebe que el relé de frenos externo (si se utiliza uno) esté
definido correctamente en el archivo de configuración.
Compruebe que la señal de E/S correspondiente esté definida
correctamente en el archivo de configuración de E/S. La forma
de comprobar los archivos de configuración se detalla en el
37104, ¡No hay ninguna tensión de backup
disponible!
Descripción
El banco de energía de backup que mantiene la tensión de
respaldo no funciona.
Consecuencias
capitulo de resolución de problemas.
Después de apagar la alimentación, debe realizar un arranque
37102, Aviso de alimentación. Fallo en nivel
COOL de 24 V.
B-start. Al apagar el sistema, no se guardará ningún cambio
realizado en los datos.
Causas probables
Descripción
La salida 24 V COOL de la alimentación del módulo de control
Puede deberse a fallos en el banco de energía de backup, el
cableado o el cargador.
está fuera de rango.
Acciones recomendadas
Consecuencias
No tiene consecuencias en el sistema.
Antes de trabajar en el sistema, realice un apagado controlado
para garantizar que todos los datos del sistema se guarden
Causas probables
correctamente. Compruebe los cables y conectores del banco
El cableado de la unidad de alimentación del Módulo de Control
o la carga de la salida pueden ser las causas del nivel de
tensión defectuoso. ¡Las fuentes de alimentación se
de energía de backup. Compruebe el banco de energía de
backup. Compruebe la fuente de alimentación. Sustituya la
unidad defectuosa en caso necesario.
representan en el Manual de resolución de problemas y en el
diagrama de circuitos!
37105, Comunicación recuperada con la fuente
de alimentación
Acciones recomendadas
Compruebe todos los cables que van a la unidad de
alimentación del Módulo de Control. Compruebe el nivel de
tensión de salida y sustituya cualquier unidad defectuosa en
caso necesario.
37103, Aviso de alimentación. Fallo en nivel de
los 24V SYS.
Descripción
El ordenador principal ha recuperado la comunicación con la
fuente de alimentación del módulo de control.
37106, Nivel de tensión bajo en el banco de
energía de respaldo
Descripción
Descripción
La salida SYS de 24 V de la alimentación del módulo de
ordenadores está fuera de rango.
La tensión del banco de energía de respaldo de la unidad de
ordenadores es insuficiente como para poder usarla.
Consecuencias
Consecuencias
No tiene consecuencias en el sistema.
Causas probables
El cableado de la unidad de alimentación del Módulo de Control
o la carga de la salida pueden ser las causas del nivel de
tensión defectuoso. ¡Las fuentes de alimentación se
No tiene consecuencias en el sistema. Al apagar el sistema,
no se guardará ningún cambio realizado en los datos.
Causas probables
Puede deberse a fallos en el banco de energía de respaldo, el
cableado o el cargador.
representan en el Manual de resolución de problemas y en el
Acciones recomendadas
diagrama de circuitos!
Antes de trabajar en el sistema, realice un apagado controlado
para garantizar que todos los datos del sistema se guarden
Acciones recomendadas
Compruebe todos los cables que van a la unidad de
alimentación del Módulo de Control. Compruebe el nivel de
tensión de salida y sustituya cualquier unidad defectuosa en
caso necesario.
correctamente. Compruebe los cables y conectores del banco
de energía de respaldo. Compruebe el banco de energía de
respaldo. Compruebe la alimentación. Sustituya la unidad
defectuosa en caso necesario.
Continúa en la página siguiente
196
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
37107, Banco de energía de respaldo en mal
estado
Consecuencias
Es posible que la unidad mecánica no se mueva al encender
los motores.
Descripción
El banco de energía de respaldo del módulo de control, que
Causas probables
mantiene la tensión de respaldo, no funciona correctamente.
Es posible que la configuración del relé de frenos sea incorrecta
o que el relé esté defectuoso. Si se utiliza un relé de frenos
Consecuencias
Si apaga la alimentación, debe realizar un arranque B-start. No
existirá ningún respaldo en caso una caída de tensión.
externo, es necesario definirlo correctamente en el archivo de
configuración del movimiento.
Acciones recomendadas
Causas probables
Puede deberse a fallos en el banco de energía de respaldo, el
cableado o el cargador.
Compruebe que el relé de frenos externo (si utiliza uno) esté
definido correctamente en el archivo de configuración.
Compruebe que la señal de E/S correspondiente esté definida
Acciones recomendadas
correctamente en el archivo de configuración de E/S. En el
Antes de trabajar en el sistema, realice un apagado controlado
Manual de resolución de problemas se detalla cómo comprobar
para garantizar que todos los datos del sistema se guarden
los archivos de configuración. Compruebe que las señales de
correctamente. Compruebe el cable y el conector del banco de
E/S estén correctamente conectadas.
energía de respaldo. Compruebe el banco de energía de
respaldo. Sustituya la unidad defectuosa en caso necesario.
37110, Falta la señal para detección de fugas
37108, Comunicación perdida: Fuente de
Alimentación y el Computador
Descripción
La detección de fugas está activada pero no hay ninguna señal
configurada para la supervisión.
Descripción
El ordenador principal ha perdido la comunicación con la fuente
de alimentación del Módulo de Control.
Acciones recomendadas
Configure la señal en Configuration/Process/Foundry Prime
Leak Detection
Consecuencias
El ordenador principal no puede recibir información del estado
37111, Fuga detectada
ni desactivar la alimentación. Al apagar el sistema, no se
guardará ningún cambio realizado en los datos.
Descripción
Se ha detectado una fuga demasiado alta durante más de arg
Causas probables
segundos.
Es posible que el cable USB que une el computador principal
a la alimentación del Módulo de Control esté defectuoso o
desconectado o que la fuente de alimentación esté defectuosa.
Acciones recomendadas
Antes de trabajar en el sistema, realice un apagado controlado
para garantizar que todos los datos del sistema se guarden
Acciones recomendadas
Busque pérdidas en el sistema.
37200, Fallo de alimentación: Alimentación de
paro de emergencia
correctamente. Compruebe los cables y conectores que van a
Descripción
la unidad de alimentación del Módulo de Control. Compruebe
Fallo de alimentación en la alimentación del paro de emergencia
la unidad de alimentación y sustituya cualquier unidad
a 24 V. Retroalimentación desde la tarjeta de interfaz de
defectuosa en caso necesario.
seguridad (SIB).
Consecuencias
37109, Fallo de liberación de frenos
El sistema pasa al estado SYS HALT.
Descripción
Acciones recomendadas
Los frenos de la unidad mecánica arg no se liberan
Compruebe los cables y las conexiones. Compruebe la
correctamente.
alimentación.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
197
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
37201, Fallo de alimentación: Alimentación del
modo a prueba de fallos a 24 V
Consecuencias
Descripción
Acciones recomendadas
Fallo de alimentación en la alimentación del modo a prueba de
Compruebe los cables y las conexiones. Compruebe la
fallos a 24 V. Retroalimentación desde la tarjeta de interfaz de
alimentación.
El sistema pasa al estado SYS HALT.
seguridad (SIB).
Consecuencias
El sistema pasa al estado SYS HALT.
37205, Fallo de alimentación: Alimentación de
purga a 12 V
Descripción
Acciones recomendadas
Compruebe los cables y las conexiones. Compruebe la
Detectado un fallo de alimentación de purga a 12 V < 10,8 V.
Retroalimentación desde la tarjeta de interfaz de manipulador
alimentación.
(SIB) arg.
37202, Fallo de alimentación: Alimentación de
E/S a 24 V
Consecuencias
Descripción
Acciones recomendadas
Fallo de alimentación en la alimentación de E/S a 24 V.
Compruebe los cables y las conexiones. Compruebe la
Retroalimentación desde la tarjeta de interfaz de seguridad
alimentación.
El sistema pasa al estado SYS HALT.
(SIB).
Consecuencias
El sistema pasa al estado SYS HALT.
37206, Fallo de alimentación: Fallan los 12 V para
la FlexPendant
Descripción
Acciones recomendadas
Compruebe los cables y las conexiones. Compruebe la
Fallo de alimentación en la alimentación de 12 V para la
FlexPendant. Retroalimentación desde la tarjeta de interfaz de
alimentación.
unidad de programación (TIB).
37203, Fallo de alimentación: Alimentación de
SYS a 24 V
Consecuencias
Descripción
Acciones recomendadas
Detectado un fallo de alimentación de SYS a 24 V < 18 V.
Compruebe los cables y las conexiones. Compruebe la fuente
Retroalimentación desde la tarjeta de interfaz de manipulador
de alimentación.
El sistema pasa al estado SYS HALT.
(SIB) arg.
37207, Carga de batería insuficiente.
Consecuencias
El sistema pasa al estado SYS HALT.
Descripción
Quedan menos de 2 meses hasta que se descargue la batería
Acciones recomendadas
Compruebe los cables y las conexiones. Compruebe la
de respaldo de la tarjeta de medida serie (SMB). Este periodo
se cuenta desde la primera vez que aparece este mensaje. La
alimentación.
batería está montada en la tarjeta de interfaz de manipulador
37204, Fallo de alimentación: Alimentación de
E/S a 24 V
(MIB).
Acciones recomendadas
Sustituya la batería que está montada en la tarjeta MIB.
Descripción
Detectado un fallo de alimentación de E/S a 24 V < 18 V.
Retroalimentación desde la tarjeta de interfaz de manipulador
37208, Temperatura excesiva en el transformador
Descripción
(SIB) arg.
La temperatura del transformador es excesiva.
Continúa en la página siguiente
198
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
37212, Fallo en contactor KM101
Consecuencias
El sistema pasa al estado SYS HALT.
Causas probables
Descripción
Se observa un fallo en el contactor de motor KM101.
Es posible que la unidad esté sobrecargada, que sus
ventiladores no funcionen correctamente o que el flujo de aire
esté obstruido.
Consecuencias
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Acciones recomendadas
Asegúrese de que los ventiladores funcionan. Compruebe que
el flujo de aire hacia los ventiladores de la unidad no esté
obstruido.
Compruebe los cables y las conexiones. Compruebe el
contactor.
37213, Fallo en contactor KM102
37209, Temperatura excesiva en el armario
Descripción
Se observa un fallo en el contactor de motor KM102.
Descripción
La temperatura del armario es excesiva.
Consecuencias
El sistema pasa al estado SYS HALT.
Consecuencias
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Compruebe los cables y las conexiones. Compruebe el
Causas probables
Es posible que la unidad esté sobrecargada, que sus
ventiladores no funcionen correctamente o que el flujo de aire
esté obstruido.
contactor.
37214, Conflicto de retroalimentación de cadena
de funcionamiento 1
Acciones recomendadas
Asegúrese de que los ventiladores funcionan. Compruebe que
el flujo de aire hacia los ventiladores de la unidad no esté
Descripción
La tarjeta de interfaz de seguridad (SIB) y la tarjeta de interfaz
de manipulador (MIB) arg informan de una divergencia en las
obstruido.
señales de retroalimentación de la cadena de funcionamiento
37210, Fallo en contactor KM1
1.
Consecuencias
Descripción
Se observa un fallo en el contactor de motor KM1.
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Consecuencias
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Compruebe los cables y las conexiones. Sustituya la tarjeta
SIB si está defectuosa. Sustituya la tarjeta MIB si está
defectuosa.
Compruebe los cables y las conexiones. Compruebe el
contactor.
37215, Conflicto de retroalimentación de cadena
de funcionamiento 2
37211, Fallo en contactor KM2
Descripción
Descripción
La tarjeta de interfaz de seguridad (SIB) y la tarjeta de interfaz
Se observa un fallo en el contactor de motor KM2.
de manipulador (MIB) arg informan de una divergencia en las
Consecuencias
señales de retroalimentación de la cadena de funcionamiento
El sistema pasa al estado SYS HALT.
2.
Acciones recomendadas
Consecuencias
Compruebe los cables y las conexiones. Compruebe el
El sistema pasa al estado SYS HALT.
contactor.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
199
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Acciones recomendadas
Compruebe los cables y las conexiones. Sustituya la tarjeta
SIB si está defectuosa. Sustituya la tarjeta MIB si está
defectuosa.
37219, Conflicto de retroalimentación de cadena
de interbloqueo de cabina 2
Descripción
La tarjeta de interfaz de seguridad (SIB) y la tarjeta de interfaz
37216, Conflicto de retroalimentación de cadena
de frenos 1
Descripción
de manipulador (MIB) arg informan de una divergencia en las
señales de retroalimentación de la cadena de interbloqueo de
cabina 2.
Consecuencias
La tarjeta de interfaz de seguridad (SIB) y la tarjeta de interfaz
El sistema pasa al estado SYS HALT.
de manipulador (MIB) arg informan de una divergencia en las
señales de retroalimentación de la cadena de frenos 1.
Acciones recomendadas
Compruebe los cables y las conexiones. Sustituya la tarjeta
Consecuencias
SIB si está defectuosa. Sustituya la tarjeta MIB si está
El sistema pasa al estado SYS HALT.
defectuosa.
Acciones recomendadas
Compruebe los cables y las conexiones. Sustituya la tarjeta
SIB si está defectuosa. Sustituya la tarjeta MIB si está
defectuosa.
37220, Conflicto de retroalimentación de cad.
interbloqueo alta tensión 1
Descripción
37217, Conflicto de retroalimentación de cadena
de frenos 2
Descripción
La tarjeta de interfaz de seguridad (SIB) y la tarjeta de interfaz
de manipulador (MIB) arg informan de una divergencia en las
señales de retroalimentación de la cadena de interbloqueo de
alta tensión (HV) 1.
La tarjeta de interfaz de seguridad (SIB) y la tarjeta de interfaz
de manipulador (MIB) arg informan de una divergencia en las
Consecuencias
El sistema pasa al estado SYS HALT.
señales de retroalimentación de la cadena de frenos 2.
Acciones recomendadas
Consecuencias
Compruebe los cables y las conexiones. Sustituya la tarjeta
El sistema pasa al estado SYS HALT.
Acciones recomendadas
SIB si está defectuosa. Sustituya la tarjeta MIB si está
defectuosa.
Compruebe los cables y las conexiones. Sustituya la tarjeta
SIB si está defectuosa. Sustituya la tarjeta MIB si está
defectuosa.
37218, Conflicto de retroalimentación de cadena
de interbloqueo de cabina 1
37221, Conflicto de retroalimentación de cad.
interbloqueo alta tensión 2
Descripción
La tarjeta de interfaz de seguridad (SIB) y la tarjeta de interfaz
de manipulador (MIB) arg informan de una divergencia en las
Descripción
señales de retroalimentación de la cadena de interbloqueo de
La tarjeta de interfaz de seguridad (SIB) y la tarjeta de interfaz
alta tensión (HV) 2.
de manipulador (MIB) arg informan de una divergencia en las
señales de retroalimentación de la cadena de interbloqueo de
Consecuencias
El sistema pasa al estado SYS HALT.
cabina 1.
Acciones recomendadas
Consecuencias
Compruebe los cables y las conexiones. Sustituya la tarjeta
El sistema pasa al estado SYS HALT.
Acciones recomendadas
SIB si está defectuosa. Sustituya la tarjeta MIB si está
defectuosa.
Compruebe los cables y las conexiones. Sustituya la tarjeta
SIB si está defectuosa. Sustituya la tarjeta MIB si está
defectuosa.
Continúa en la página siguiente
200
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
37222, Conflicto de retroalimentación de cadena
de interbloqueo de sistema 2
37225, Conflicto de cadena de interbloqueo de
cabina 2
Descripción
Descripción
La tarjeta de interfaz de seguridad (SIB) y la tarjeta de interfaz
Divergencia de la cadena de interbloqueo de cabina 2 entre las
de manipulador (MIB) arg informan de una divergencia en las
señales de entrada y salida de la tarjeta de interfaz de seguridad
señales de retroalimentación de la cadena de interbloqueo de
(SIB).
sistema 2.
Consecuencias
Consecuencias
La cadena de habilitación de pintura se abre.
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Acciones recomendadas
Compruebe los cables y las conexiones. Sustituya la tarjeta
Compruebe los cables y las conexiones. Sustituya la tarjeta
SIB si está defectuosa.
SIB si está defectuosa. Sustituya la tarjeta MIB si está
37226, Conflicto de cadena de interbloqueo de
alta tensión 1
defectuosa.
37223, Conflicto de retroalimentación de cadena
de relés principal
Descripción
Descripción
1 entre las señales de entrada y salida de la tarjeta de interfaz
La tarjeta de interfaz de seguridad (SIB) y la tarjeta de interfaz
de seguridad (SIB).
de manipulador (MIB) arg informan de una divergencia en las
señales de retroalimentación de la cadena de relés principal.
Consecuencias
Divergencia de la cadena de interbloqueo de alta tensión (HV)
Consecuencias
La cadena de habilitación de pintura se abre.
Acciones recomendadas
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Compruebe los cables y las conexiones. Sustituya la tarjeta
SIB si está defectuosa.
Compruebe los cables y las conexiones. Sustituya la tarjeta
SIB si está defectuosa. Sustituya la tarjeta MIB si está
defectuosa.
37224, Conflicto de cadena de interbloqueo de
cabina 1
Descripción
37227, Conflicto de cadena de interbloqueo de
alta tensión 2
Descripción
Divergencia de la cadena de interbloqueo de alta tensión (HV)
2 entre las señales de entrada y salida de la tarjeta de interfaz
de seguridad (SIB).
Divergencia de la cadena de interbloqueo de cabina 1 entre las
señales de entrada y salida de la tarjeta de interfaz de seguridad
Consecuencias
La cadena de habilitación de pintura se abre.
(SIB).
Acciones recomendadas
Consecuencias
Compruebe los cables y las conexiones. Sustituya la tarjeta
La cadena de habilitación de pintura se abre.
SIB si está defectuosa.
Acciones recomendadas
Compruebe los cables y las conexiones. Sustituya la tarjeta
SIB si está defectuosa.
37228, Conflicto de cadena de interbloqueo de
cabina desde la tarjeta SIB
Descripción
Sólo una de las dos cadenas de interbloqueo de cabina estaba
abierta. Detectado por la tarjeta de interfaz de seguridad (SIB).
Consecuencias
La cadena de habilitación de pintura se abre.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
201
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Acciones recomendadas
Sustituya la tarjeta SIB si está defectuosa.
37229, Conflicto de cadena de interbloqueo de
alta tensión desde la tarjeta SIB
Descripción
37232, Error de configuración de Cyclic Brake
Check
Descripción
La función Cyclic Brake Check ha detectado que el freno
mecánico de la unidad mecánica arg y el eje número arg no
tiene definido ningún nivel de requisito de par de frenado.
Sólo una de las dos cadenas de interbloqueo de alta tensión
(HV) estaba abierta. Detectado por la tarjeta de interfaz de
seguridad (SIB).
Consecuencias
Cyclic Brake Check continuará ejecutándose, pero no se realiza
ninguna comprobación de freno válida en este eje.
Consecuencias
Causas probables
La cadena de habilitación de pintura se abre.
Acciones recomendadas
Los datos de configuración de movimientos no se han
especificado correctamente para este eje.
Sustituya la tarjeta SIB si está defectuosa.
Acciones recomendadas
Los datos de configuración de movimientos no se han
37230, Aviso de rendimiento de los frenos
especificado correctamente para este eje: Especifique un valor
Descripción
para el parámetro max_static_arm_torque si necesita incluir el
La función Cyclic Brake Check indica que el freno de la unidad
eje en las pruebas. Desactive Cyclic Brake Check en la
mecánica arg y el eje número arg no presenta todo su par de
configuración si el eje no debe incluirse en las pruebas.
frenado.
Parámetro 'Deactivate Cyclic Brake Check for axis', tema
Motion, tipo 'Arm'.
Consecuencias
Sólo es un aviso y no se requiere ninguna acción inmediata.
37231, Error de rendimiento de los frenos
37233, Error de configuración de Cyclic Brake
Check
Descripción
Descripción
La función Cyclic Brake Check ha detectado que el freno
mecánico de la unidad mecánica arg y el eje número arg
presenta un par de frenado insuficiente.
La función Cyclic Brake Check ha detectado que el freno
mecánico de la unidad mecánica arg y el eje número arg debe
probarse de acuerdo con la configuración. Sin embargo, la
unidad mecánica en sí no puede ser incluida en el Safety
Consecuencias
Controller porque se permite la activación/desactivación en
AVISO: El rendimiento del freno es demasiado bajo en este
tiempo de ejecución.
eje.
Hasta que se verifique que el freno tiene un par de frenado
suficiente/aprobado, solo es posible mover el robot con la
velocidad reducida manual especificada ("Velocidad reducida
Consecuencias
Cyclic Brake Check continuará con las otras unidades
mecánicas.
máx. (mm/s)") según la configuración realizada en el
Causas probables
configurador de Cyclic Brake Check.
Los datos de configuración de movimiento no se han
especificado correctamente para este eje.
Acciones recomendadas
Ejecute Cycle Brake Check de nuevo. Sustituya el motor con
Acciones recomendadas
su freno.
Los datos de configuración de movimiento no se han
especificado correctamente para este eje: Se ha especificado
Cyclic Brake Check, pero no debe hacerse en este eje. La
unidad mecánica debe estar activa en el momento del inicio y
no se debe permitir su desactivación.
Continúa en la página siguiente
202
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
37234, Aviso de rendimiento de los frenos
Consecuencias
La comprobación de frenos continuará ejecutándose, pero no
Descripción
La función Brake Check indica que el freno mecánico de la
se realiza ninguna comprobación de freno válida en este eje.
unidad mecánica arg y el eje número arg no presenta todo su
Causas probables
par de frenado.
Los datos de configuración de movimientos no se han
especificado correctamente para este eje.
Consecuencias
Sólo es un aviso y no se requiere ninguna acción inmediata.
Acciones recomendadas
Los datos de configuración de movimientos no se han
37235, Error de rendimiento de los frenos
especificado correctamente para este eje: Especifique un valor
para el parámetro max_static_arm_torque si necesita incluir el
Descripción
eje en las pruebas. Desactive BrakeCheck en la configuración
La función Brake Check ha detectado que el freno mecánico
de la unidad mecánica arg y el eje número arg presenta un par
si el eje no debe incluirse en las pruebas. Parámetro 'Deactivate
Cyclic Brake Check for axis', tema Motion, tipo 'Arm'.
de frenado insuficiente.
Consecuencias
AVISO: El rendimiento del freno es demasiado bajo en este
eje.
37240, Conflicto de cadena de interbloqueo de
cabina desde la tarjeta MIB
Descripción
Acciones recomendadas
Sólo una de las dos cadenas de interbloqueo de cabina estaba
Ejecute Brake Check de nuevo. Sustituya el motor con su freno.
abierta. Detectado por la tarjeta de interfaz de manipulador
(SIB) arg.
37236, Error de configuración de Brake Check
Consecuencias
La cadena de habilitación de pintura se abre.
Descripción
La función Brake Check ha detectado que el freno mecánico
de la unidad mecánica arg y el eje número arg debe probarse.
Acciones recomendadas
Sustituya la tarjeta MIB si está defectuosa.
La unidad mecánica en sí no puede ser incluida en la prueba
porque se permite la activación/desactivación en tiempo de
ejecución.
Consecuencias
Brake Check continuará con las otras unidades mecánicas.
Causas probables
37241, Conflicto de cadena de interbloqueo de
alta tensión desde la tarjeta MIB
Descripción
Sólo una de las dos cadenas de alta tensión (HV) estaba abierta.
Detectado por la tarjeta de interfaz de manipulador (SIB) arg.
Los datos de configuración de movimiento no se han
especificado correctamente para este eje.
Acciones recomendadas
Los datos de configuración de movimiento no se han
especificado correctamente para este eje: Se ha especificado
Brake Check, pero no debe hacerse en este eje. La unidad
mecánica debe estar activa en el momento del inicio y no se
debe permitir su desactivación.
Consecuencias
La cadena de habilitación de pintura se abre.
Acciones recomendadas
Sustituya la tarjeta MIB si está defectuosa.
37242, Conflicto de cadena de funcionamiento
desde la tarjeta SIB
Descripción
37237, Error de configuración de Brake Check
Sólo una de las dos señales de retroalimentación de cadena
de funcionamiento de la tarjeta de interfaz de seguridad (SIB)
Descripción
La comprobación de frenos ha detectado que el freno mecánico
estaba abierta.
de la unidad mecánica arg y el eje número arg no tiene definido
Consecuencias
ningún nivel de requisito de par de frenado.
El sistema pasa al estado SYS HALT.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
203
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Acciones recomendadas
Acciones recomendadas
Sustituya la tarjeta SIB si está defectuosa.
Pulse el paro de emergencia y restablezca de nuevo el paro
de emergencia. Sustituya la tarjeta SIB si está defectuosa.
37243, Conflicto de cadena de frenos desde la
tarjeta SIB
37247, Fallo del ventilador de circulación arg
Descripción
Descripción
Sólo una de las dos señales de cadena de frenos de la tarjeta
El ventilador de circulación para los sistemas de accionamiento
de interfaz de seguridad (SIB) estaba abierta.
de la parte posterior del armario se ha parado o gira muy
lentamente.
Consecuencias
El sistema pasa al estado SYS HALT.
Consecuencias
La temperatura de los sistemas de accionamiento aumentará.
Acciones recomendadas
Sustituya la tarjeta SIB si está defectuosa.
Causas probables
Ventilador, cableado o fuente de alimentación en mal estado.
37244, Conflicto de cad. funcion. de tarjeta MIB
arg
¡Consulte el diagrama de circuitos!
Descripción
Compruebe los cables del ventilador. Compruebe la
Sólo una de las dos señales de retroalimentación de cadena
alimentación. Compruebe el ventilador.
Acciones recomendadas
de funcionamiento de la tarjeta de interfaz de manipulador (MIB)
estaba abierta.
37248, Fallo del ventilador de circulación arg
Consecuencias
Descripción
El sistema pasa al estado SYS HALT.
El ventilador de circulación de la puerta delantera del armario
se ha parado o gira muy lentamente.
Acciones recomendadas
Sustituya la tarjeta MIB si está defectuosa.
Consecuencias
La temperatura del armario aumentará.
37245, Conflicto de cad. frenos de la tarjeta MIB
arg
Causas probables
Descripción
¡Consulte el diagrama de circuitos!
Sólo una de las dos señales de retroalimentación de cadena
Acciones recomendadas
de frenos de la tarjeta de interfaz de manipulador (MIB) estaba
Compruebe los cables del ventilador. Compruebe la
abierta.
alimentación. Compruebe el ventilador.
Ventilador, cableado o fuente de alimentación en mal estado.
Consecuencias
El sistema pasa al estado SYS HALT.
Acciones recomendadas
Sustituya la tarjeta MIB si está defectuosa.
37249, Fallo en los circuitos de paro de
emergencia
Descripción
Se detectaron dos o más cambios de estado en la señal en
37246, Conflicto de relé de paro de emergencia
unos pocos milisegundos. Este mensaje se debe muy
probablemente a la existencia de conexiones defectuosas en
Descripción
Sólo una de las dos señales de paro de emergencia estaba
abierta internamente en la tarjeta de interfaz de seguridad (SIB).
los circuitos ES_INPUT.
Consecuencias
Es posible que los motores y equipos de pintura estén
Consecuencias
El sistema permanece en el estado de paro de emergencia.
desactivados.
Acciones recomendadas
Compruebe los cables y conexiones del sistema de seguridad
para ES_INPUT.
Continúa en la página siguiente
204
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
37250, Fallos en el circuito de paro de modo
automático
incorrectas en los circuitos Run_Chain de la tarjeta de interfaz
Descripción
Consecuencias
Se detectaron dos o varios cambios de estado en la señal en
Es posible que los motores estén desactivados.
unos pocos milisegundos. Este mensaje se debe muy
Acciones recomendadas
probablemente a la existencia de problemas con las conexiones
Compruebe los cables y conexiones del sistema de seguridad.
en los circuitos MODE_STOP.
Compruebe si existen otros mensajes de error para las
Consecuencias
conexiones externas (interbloqueos).
de seguridad (SIB).
Es posible que los motores estén desactivados.
Acciones recomendadas
Compruebe los cables y conexiones del sistema de seguridad
37254, Fallos en la cadena de funcionamiento de
MIB
para Auto_Mode_Stop (o Test_Mode_Stop / dispositivo de
Descripción
habilitación).
Se detectaron dos o más cambios de estado en la señal en
unos pocos milisegundos. Este mensaje se debe muy
37251, Fallos en el circuito de paro retardado
probablemente a la existencia de conexiones incorrectas en
los circuitos Run_Chain de la tarjeta de interfaz de manipulador
Descripción
Se detectaron dos o más cambios de estado en la señal en
(MIB).
unos pocos milisegundos. Este mensaje se debe muy
Consecuencias
probablemente a la existencia de problemas en las conexiones
Es posible que los motores para el CBS o movimiento del CBS
de los circuitos DLY_STOP.
estén desactivados.
Consecuencias
Acciones recomendadas
Es posible que los motores estén desactivados.
Compruebe los cables y conexiones del sistema de seguridad.
Compruebe si existen otros mensajes de error para las
Acciones recomendadas
Compruebe los cables y conexiones del sistema de seguridad
para DLY_STOP.
37252, Fallos en el circuito de paro general
conexiones externas (interbloqueos).
37255, Fallos en el circuito de interbloqueo de
cabina
Descripción
Descripción
Se detectaron dos o máscambios de estado en la señal en unos
pocos milisegundos. Este mensaje se debe muy probablemente
a la existencia de problemas en las conexiones de los circuitos
GM_STOP.
Se detectaron dos o más cambios de estado en la señal en
unos pocos milisegundos. Este mensaje se debe muy
probablemente a la existencia de conexiones incorrectas en
los circuitos de interbloqueo de la cabina.
Consecuencias
Consecuencias
Es posible que los motores estén desactivados.
Es posible que los equipos de pintura estén desactivados.
Acciones recomendadas
Acciones recomendadas
Compruebe los cables y conexiones del sistema de seguridad
para GM_STOP.
37253, Fallos en la cadena de funcionamiento de
SIB
Compruebe los cables y conexiones del sistema de seguridad
para el interbloqueo de cabina.
37256, Fallos en el circuito de interbloqueo de
alta tensión
Descripción
Descripción
Se detectaron dos o más cambios de estado en la señal en
unos pocos milisegundos. Este mensaje se debe muy
Se detectaron dos o más cambios de estado en la señal en
unos pocos milisegundos. Este mensaje se debe muy
probablemente a la existencia de problemas de conexión
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
205
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
probablemente a la existencia de conexiones incorrectas en
Acciones recomendadas
los circuitos de interbloqueo de alta tensión.
Compruebe los cables y conexiones del sistema de seguridad
de la cadena de funcionamiento de AUX.
Consecuencias
Es posible que la alta tensión esté desactivada.
37260, Fallo de controlador de frenos
Acciones recomendadas
Compruebe los cables y conexiones del sistema de seguridad
Descripción
para el interbloqueo de alta tensión.
La supervisión de frenos de la Manipulator Controller Board
(MCOB) arg ha detectado un fallo de controlador en el eje arg
37257, Fallos en el circuito de interbloqueo de
sistema 2
y ha ACTIVADO todos los frenos.
Acciones recomendadas
Compruebe/sustituya la MCOB.
Descripción
Se detectaron dos o más cambios de estado en la señal en
unos pocos milisegundos. Este mensaje se debe muy
37261, Fallo del ventilador de la PDB
probablemente a la existencia de conexiones incorrectas en
Descripción
los circuitos de interbloqueo de sistema 2.
El ventilador de refrigeración para la PDB se ha parado o gira
Consecuencias
muy lentamente.
Es posible que los equipos de pintura estén desactivados.
Consecuencias
Acciones recomendadas
La temperatura de la tarjeta de distribución de alimentación
Compruebe los cables y conexiones del sistema de seguridad
(PDB) aumentará.
para el interbloqueo de sistema 2.
Causas probables
Ventilador, cableado o fuente de alimentación en mal estado.
37258, Fallos en el circuito de interbloqueo de
proceso
¡Consulte el diagrama de circuitos!
Descripción
Compruebe los cables del ventilador. Compruebe la fuente de
Se detectaron dos o más cambios de estado en la señal en
alimentación. Compruebe el ventilador.
Acciones recomendadas
unos pocos milisegundos. Este mensaje se debe muy
los circuitos de interbloqueo de proceso.
37262, Divergencia entre las salidas de PSA y
las entradas de SIB
Consecuencias
Descripción
Es posible que los equipos de pintura estén desactivados.
Paint Safety Adapter ha intentado desactivar una entrada de
Acciones recomendadas
interbloqueo, pero la retroalimentación sigue activa.
Compruebe los cables y conexiones del sistema de seguridad
Consecuencias
para el interbloqueo de proceso.
La cadena de habilitación de pintura se abre.
probablemente a la existencia de conexiones incorrectas en
37259, Fallos en el circuito de interbloqueo AUX
Acciones recomendadas
Inspeccione los cables y conectores. Cambie el hardware.
Descripción
Se detectaron dos o más cambios de estado en la señal en
unos pocos milisegundos. Este mensaje se debe muy
probablemente a la existencia de problemas con las conexiones
de los circuitos de cadena de funcionamiento AUX. Se utiliza
normalmente para las puertas de Cartridge Bell System (CBS).
Consecuencias
Es posible que los motores y el movimiento del sistema 2 estén
desactivados.
37263, PSA desactivado desde el sistema
superior
Descripción
Paint Safety Adapter se ha desactivado desde el sistema de
control superior.
Consecuencias
La cadena de habilitación de pintura se abre.
Continúa en la página siguiente
206
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
37501, Sistema de archivos desconocido:
Dispositivo USB
Causas probables
El dispositivo de acceso masivo fue retirado o se produjo un
problema de funcionamiento del dispositivo de almacenamiento
Descripción
El tipo de sistema de archivos del dispositivo USB de la unidad
masivo.
Acciones recomendadas
lógica arg no se admite.
Si el problema no desaparece, pruebe con otro dispositivo.
Consecuencias
El dispositivo USB de la unidad lógica arg no puede leerse. El
sistema de archivos es del tipo arg. Los archivos del dispositivo
USB de la unidad lógica arg no estarán disponibles.
37504, Error del sistema de archivos de la
memoria de almacenamiento
Descripción
Causas probables
El sistema de archivos está formateado con un tipo de sistema
Error del sistema de archivos de la memoria de
almacenamiento.
de archivo no admitido.
Consecuencias
Acciones recomendadas
Formatee el dispositivo USB con el sistema de archivos FAT32.
El sistema pasa al estado de fallo del sistema. El sistema de
archivos del dispositivo de almacenamiento masivo puede estar
37502, Dispositivo de almacenamiento masivo
retirado
dañado. Los archivos del dispositivo de almacenamiento masivo
pueden estar dañados.
Causas probables
Descripción
El dispositivo de almacenamiento masivo fue retirado.
Consecuencias
El dispositivo de acceso masivo fue retirado o se produjo un
problema de funcionamiento del dispositivo de almacenamiento
masivo.
El sistema pasa al estado de fallo del sistema. El sistema de
archivos del dispositivo de almacenamiento masivo puede estar
dañado. Los archivos del dispositivo de almacenamiento masivo
pueden estar dañados. Los archivos del dispositivo de
almacenamiento masivo no estarán disponibles.
Acciones recomendadas
Si el problema no desaparece, pruebe con otro dispositivo.
37505, Escritura en la memoria de
almacenamiento USB durante el apagado
Causas probables
El dispositivo de acceso masivo fue retirado o se produjo un
problema de funcionamiento del dispositivo de almacenamiento
Descripción
Se produjo una escritura en la memoria de almacenamiento
USB durante el apagado.
masivo.
Consecuencias
Acciones recomendadas
Compruebe que el dispositivo de almacenamiento masivo esté
bien colocado. Si el problema no desaparece, pruebe con otro
El tiempo de apagado anterior puede haber sido más largo de
lo habitual.
Causas probables
dispositivo.
Se produjo una escritura activa en la unidad de memoria de
37503, Error del sistema de archivos de la
memoria de almacenamiento
almacenamiento USB durante el apagado.
Descripción
Ninguno. El tiempo de apagado anterior puede haber sido más
Error del sistema de archivos de la memoria de
largo de lo habitual.
Acciones recomendadas
almacenamiento.
38100, Fallo de configuración
Consecuencias
Se ha detectado un error en el sistema de archivos. El error ha
Descripción
sido corregido. La corrección podría dar lugar a la pérdida de
El sistema de accionamiento ha detectado un fallo de
archivos.
configuración en la conexión con el sistema de medida.
Drive Module: arg
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
207
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Conexión con el sistema de medida: arg
Acciones recomendadas
Posición de tarjeta: arg
Reinicie el sistema. Restablezca los cuentarrevoluciones del
robot de la forma detallada en el Manual de producto del robot.
Acciones recomendadas
Compruebe la configuración del sistema de medida. Compruebe
la configuración de la tarjeta de medida. Compruebe la
configuración de los nodos de medida.
Asegúrese de que no se produzca una emisión de niveles
extremos de interferencia electromagnética cerca de los cables
del robot. Asegúrese de que el ordenador de ejes funcione
perfectamente. Sustituya cualquier unidad defectuosa.
38101, Fallo de comunicación de SMB
Descripción
38103, Comunicación perdida con la tarjeta de
medida serie
Se ha detectado un fallo de transmisión entre el eje ordenador
de ejes y la tarjeta de medida serie del enlace de medición arg
Descripción
Se ha perdido la comunicación entre el eje ordenador de ejes
del módulo de accionamiento arg.
y la tarjeta de medida serie del enlace de medición arg del Drive
Consecuencias
Module arg.
El sistema pasa al estado SYSFAIL y pierde su información de
Consecuencias
calibración.
El sistema pasa al estado SYSFAIL y pierde su información de
Causas probables
calibración.
Puede deberse a la existencia de conexiones o cables (o su
apantallado) en mal estado, especialmente si se utilizan cables
distintos de los de ABB para los ejes adicionales. También
puede deberse a una avería de la tarjeta de medida serie o del
Causas probables
Puede deberse a la existencia de conexiones o cables (o su
apantallado) en mal estado, especialmente si se utilizan cables
distintos de los de ABB para los ejes adicionales. También
ordenador de ejes.
puede deberse a una avería de la tarjeta de medida serie o del
Acciones recomendadas
ordenador de ejes.
Restablezca los cuentarrevoluciones del robot de la forma
detallada en el Manual de producto del robot. Asegúrese de
que el cable que une la tarjeta de medida serie al ordenador
de ejes esté conectado correctamente y que cumpla las
especificaciones establecidas por ABB. Asegúrese de que el
apantallamiento del cable esté conectado correctamente en
ambos extremos. Asegúrese de que no se produzca una
emisión de niveles extremos de interferencia electromagnética
cerca de los cables del robot. Asegúrese de que la tarjeta de
medida serie y el ordenador de ejes funcionen perfectamente.
Sustituya cualquier unidad defectuosa.
Acciones recomendadas
Restablezca los cuentarrevoluciones del robot de la forma
detallada en el Manual de producto del robot. Asegúrese de
que el cable que une la tarjeta de medida serie al ordenador
de ejes esté conectado correctamente y que cumpla las
especificaciones establecidas por ABB. Asegúrese de que el
apantallamiento del cable esté conectado correctamente en
ambos extremos. Asegúrese de que no se produzca una
emisión de niveles extremos de interferencia electromagnética
cerca de los cables del robot. Asegúrese de que la tarjeta de
medida serie y el ordenador de ejes funcionen perfectamente.
38102, Fallo interno
Sustituya cualquier unidad defectuosa.
Descripción
38104, Velocidad excesiva durante el modo de
programación
El sistema de medición ha detectado un fallo de hardware o
software en el enlace de medición arg del Drive Module arg.
Descripción
Consecuencias
El eje arg conectado al Drive Module arg ha superado la
El sistema pasa al estado SYSFAIL y pierde su información de
calibración.
velocidad máxima de funcionamiento en el modo de
programación.
Causas probables
Consecuencias
Puede deberse a alguna disrupción temporal en la célula del
El sistema pasa al estado SYS HALT.
robot o a una avería del ordenador de ejes.
Continúa en la página siguiente
208
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Causas probables
Acciones recomendadas
Es posible que el robot haya sido movido manualmente
Asegúrese de que haya una batería de tarjeta de medida serie
mientras se encontraba en el estado Motores OFF. El error
conectada a la tarjeta. ¡ATENCIÓN! La desconexión del cable
también puede deberse a un desajuste en la relación y
de señales del robot puede suponer la desconexión de la
conmutación entre el eje del motor y el resolver de un eje
alimentación de la batería de la tarjeta de medida serie, lo que
adicional, principalmente durante la instalación.
dispara el registro del aviso sobre la batería. Para restablecer
el aviso de alimentación de la batería, actualice los
Acciones recomendadas
Presione el dispositivo de habilitación para intentar reanudar
el funcionamiento. Compruebe otros mensajes del registro de
eventos que se hayan producido al mismo tiempo para
cuentarrevoluciones de la forma detallada en el Manual de
calibración o el Manual del producto. Sustitúyala la batería si
está descargada.
determinar la causa real. Realice una reconmutación del motor
en cuestión. La forma de hacerlo se especifica en el Manual
38201, Tarjeta serie no encontrada
de ejes adicionales.
Descripción
La tarjeta de medida serie no se encuentra en el enlace de
38105, Datos no encontrados.
medición.
Módulo de accionamiento: arg
Descripción
No se han encontrado los datos de configuración de la tarjeta
Enlace de medición: arg
Tarjeta de medición: arg
de medición.
El sistema utilizará los datos predeterminados.
Acciones recomendadas
Módulo de accionamiento: arg
Compruebe los parámetros de configuración del sistema.
Enlace de medición: arg
Compruebe las conexiones y los cables de la tarjeta de medida
Nodo de tarjeta: arg
serie. Sustituya la tarjeta de medida serie.
Acciones recomendadas
Compruebe la configuración.
38203, Error de offset X de la tarjeta de medida
serie
38200, Respaldo con batería perdido
Descripción
Error de offset en la señal X de la tarjeta de medida serie.
Descripción
El respaldo con batería de la tarjeta de medida serie (SMB) arg
del robot conectado al módulo de accionamiento arg en el
enlace de medición arg se ha perdido.
Módulo de accionamiento: arg
Enlace de medición: arg
Tarjeta de medición: arg
Acciones recomendadas
Consecuencias
Cuando se interrumpa la alimentación de la batería de la tarjeta
Sustituya la tarjeta de medida serie.
de medida serie, el robot perderá los datos de los
repetidamente.
38204, Error de offset Y de la tarjeta de medida
serie
Causas probables
Descripción
Puede deberse a que la batería de la tarjeta de medida serie
Error de offset en la señal Y de la tarjeta de medida serie.
esté descargada o no conectada. En algunos modelos de robot,
Módulo de accionamiento: arg
la alimentación de la batería SMB se recibe a través de un
Enlace de medición: arg
puente del cable de señales del robot (consulte el Diagrama
Tarjeta de medición: arg
de circuitos del IRC5) y la desconexión de ese cable interrumpe
Acciones recomendadas
la alimentación que va a la batería. Algunas versiones de robot
Sustituya la tarjeta de medida serie.
cuentarrevoluciones. Este aviso también se registrará
anteriores utilizan baterías recargables y éstas deben cargarse
durante al menos 18 horas para que funcionen correctamente.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
209
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
38205, Error de linealidad de la tarjeta de medida
serie
Acciones recomendadas
Compruebe el resolver y sus conexiones. Sustituya la tarjeta
de medida serie. Sustituya el resolver.
Descripción
Error de linealidad en la diferencia entre las señales X-Y de la
tarjeta de medida serie.
38209, Error de resolver
Puede seguir usando el sistema si se trata de un aviso.
Descripción
El sistema no funcionará si se trata de un error.
Tensión insuficiente en las señales X e Y del resolver.
Módulo de accionamiento: arg
La suma de los cuadrados de las señales X e Y es insuficiente.
Enlace de medición: arg
Eje: arg
Tarjeta de medición: arg
Módulo de accionamiento: arg
Enlace de medición: arg
Acciones recomendadas
Tarjeta de medición: arg
Sustituya la tarjeta de medida serie.
Nodo de tarjeta: arg
38206, Error de linealidad X de la tarjeta de
medida serie
Acciones recomendadas
Compruebe el resolver y sus conexiones. Sustituya la tarjeta
de medida serie. Sustituya el resolver.
Descripción
Error de linealidad en la señal X de la tarjeta de medida serie.
Módulo de accionamiento: arg
38210, Fallo de transmisión.
Enlace de medición: arg
Descripción
Tarjeta de medición: arg
Fallo de comunicación SMS con la tarjeta de medida serie.
Estado: arg
Acciones recomendadas
Módulo de accionamiento: arg
Sustituya la tarjeta de medida serie.
Enlace de medición: arg
38207, Error de linealidad Y de la tarjeta de
medida serie
Tarjeta de medición: arg
Nodo de tarjeta: arg
Acciones recomendadas
Descripción
Error de linealidad en la señal Y de la tarjeta de medida serie.
Módulo de accionamiento: arg
Reinicie el sistema. Compruebe el cable y los conectores de
comunicación con la tarjeta de medida serie. Sustituya la tarjeta
de medida serie.
Enlace de medición: arg
Tarjeta de medición: arg
38211, Error de funcionalidad de medición.
Acciones recomendadas
Descripción
Sustituya la tarjeta de medida serie.
La tarjeta de medida serie no admite el uso de 7 ejes.
Drive Module: arg
38208, Error de resolver
Enlace de medición: arg
Descripción
Tarjeta de medición: arg
Tensión excesiva en las señales X e Y del resolver.
La suma de los cuadrados de las señales X e Y supera el
máximo.
Acciones recomendadas
Compruebe la configuración del eje 7. Sustituya la tarjeta de
medida serie con una tarjeta que admita la funcionalidad de 7
Eje: arg
ejes.
Módulo de accionamiento: arg
Enlace de medición: arg
38212, Datos no encontrados.
Tarjeta de medición: arg
Descripción
Nodo de tarjeta: arg
Datos de configuración de la tarjeta de medida serie no
encontrados. El sistema utilizará los datos predeterminados.
Continúa en la página siguiente
210
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
38216, Error de funcionalidad de la tarjeta de
medida serie.
Módulo de accionamiento: arg
Enlace de medición: arg
Tarjeta de medición: arg
Descripción
Acciones recomendadas
La tarjeta de medida serie no admite la funcionalidad necesaria.
Compruebe la configuración.
La funcionalidad necesaria está disponible en la unidad
DSQC633C o preferiblemente en la SMB.
38213, Carga de batería insuficiente.
Drive Module: arg
Enlace de medición: arg
Descripción
La batería de la tarjeta de medida serie se agotará dentro de
Tarjeta de medición: arg
poco tiempo. Sustituya la batería tan pronto como sea posible.
Consecuencias
Drive Module: arg
El rendimiento de movimiento será menor que el que debería
Enlace de medición: arg
existir con la unidad DSQC633C o preferiblemente con la SMB.
Tarjeta de medición: arg
Acciones recomendadas
Acciones recomendadas
Sustituya la tarjeta de medida serie por una tarjeta que admita
No apague el controlador hasta haber sustituido la batería.
al menos la funcionalidad DSQC633C.
Sustituya la batería de la tarjeta de medida serie.
38214, Fallo de batería.
38217, Error de funcionalidad de la tarjeta de
medida serie.
Descripción
Descripción
Fallo al desconectar la batería para el transporte. La batería
La tarjeta de medida serie no admite la funcionalidad necesaria.
seguirá en el modo normal.
La funcionalidad necesaria está disponible en la unidad
Módulo de accionamiento: arg
DSQC633D o preferiblemente en la SMB.
Enlace de medición: arg
Drive Module: arg
Tarjeta de medición: arg
Enlace de medición: arg
Tarjeta de medición: arg
Acciones recomendadas
Vuelva a intentar apagar el sistema. Sustituya la tarjeta de
Consecuencias
medida serie.
El rendimiento de movimiento será menor que el que debería
existir con la unidad DSQC633D o preferiblemente con la SMB.
38215, Fallo de supervisión de batería.
Acciones recomendadas
Descripción
Sustituya la tarjeta de medida serie por una tarjeta que admita
Se ha producido un fallo durante el restablecimiento del circuito
al menos la funcionalidad DSQC633D.
de supervisión de batería de la tarjeta de medida serie.
38218, Alta temperatura del encoder
Módulo de accionamiento: arg
Enlace de medición: arg
Descripción
Tarjeta de medición: arg
La temperatura del encoder del motor es excesiva.
Acciones recomendadas
Eje: arg.
Repita la actualización del cuentarrevoluciones del eje
Módulo de accionamiento: arg.
conectado a la tarjeta de medida serie. Sustituya la tarjeta de
Enlace de medición: arg.
medida serie.
Tarjeta de medición: arg
Nodo de tarjeta: arg.
Consecuencias
La vida útil del encoder puede verse reducida.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
211
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Acciones recomendadas
Causas probables
Detenga el robot y espere que el encoder del motor se enfríe.
Probablemente, este error se debe a un error en la
Reduzca la temperatura ambiente. Cambie el programa del
configuración de movimientos.
robot para evitar que se produzcan velocidades y pares altos.
Acciones recomendadas
Compruebe los límites de los canales de esta tarjeta en la
38230, Tarjeta PMC no conectada correctamente
configuración de movimientos.
Descripción
movimientos no está conectada o no funciona correctamente.
38233, Error del canal de seguridad del sensor
de fuerza
Consecuencias
Descripción
No fue posible ejecutar la aplicación que hace uso de esta
El canal de seguridad del cable que une el sensor de fuerza a
tarjeta PMC.
la tarjeta de medida está por debajo del nivel de tensión
La tarjeta PMC que está definida en la configuración de
configurado para el canal de seguridad. El sensor de fuerza
Causas probables
La tarjeta PMC no está conectada o está averiada.
está conectado al computador de ejes del sistema de
accionamiento arg.
Acciones recomendadas
Compruebe que la tarjeta PMC esté conectada al computador
de ejes del sistema de accionamiento arg.
Consecuencias
El sistema pasará a SYS HALT y la aplicación que hace uso de
este sensor no podrá ejecutarse hasta que conecte o sustituya
38231, No es posible poner en marcha la tarjeta
PMC
el cable. La supervisión del canal de seguridad puede
desconectarse en la configuración de movimiento.
Causas probables
Descripción
La tarjeta PMC que está definida en la configuración de
movimientos no está configurada correctamente y no es posible
ponerla en marcha.
El cable no está conectado correctamente. El cable presenta
daños en los conectores o en el propio cable. El cable de sensor
no tiene ningún canal de seguridad.
Acciones recomendadas
Consecuencias
No fue posible ejecutar la aplicación que hace uso de esta
tarjeta PMC.
Asegúrese de que el cable esté conectado correctamente e
inspeccione los conectores de ambos extremos del cable, así
como el propio cable. Sustituya en caso de daños.
Causas probables
Probablemente, este error se debe a un error en la
38234, Alcanzada la fuerza o el par máximos
configuración de movimientos.
Descripción
Acciones recomendadas
La fuerza o el par medidos en el sensor de fuerza que está
Compruebe los límites de los canales de esta tarjeta en la
configuración de movimientos.
conectado al ordenador de ejes del módulo de accionamiento
arg tiene un valor mayor del configurado.
38232, Alcanzado el número máximo de canales
de PMC
Consecuencias
El sistema no se detendrá por este motivo.
Causas probables
Descripción
La tarjeta PMC que está definida en la configuración de
movimientos no está configurada correctamente y no es posible
ponerla en marcha.
La fuerza o el par aplicados en el sensor es mayor de lo
configurado. La causa puede ser la solicitud de una referencia
demasiado elevada. También es posible que la configuración
sea incorrecta.
Consecuencias
No fue posible ejecutar la aplicación que hace uso de esta
tarjeta PMC.
Acciones recomendadas
Compruebe las referencias de fuerza y par del programa y si
el entorno ha aplicado una fuerza o un par excesivos al sensor.
Continúa en la página siguiente
212
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
38235, Aviso de saturación de la entrada del
sensor de fuerza
38238, El sensor de fuerza tiene señales
demasiado ruidosas.
Descripción
Descripción
Los valores de entrada analógicos de la tarjeta de medida
El sensor de fuerza detectó señales con un nivel de ruido
conectada al sensor de fuerza se han saturado y el tiempo de
superior al esperado.
saturación ha sobrepasado el nivel de aviso.
Tarea: arg
La tarjeta de medida está conectada al ordenador de ejes del
Ref. de programa arg.
módulo de accionamiento arg
Consecuencias
Acciones recomendadas
La aplicación de control de fuerza no puede ejecutarse.
Compruebe la carga que se aplicó al sensor de fuerza/par.
Compruebe que ni el cable, el sensor ni la tarjeta de medida
presenten daños.
Causas probables
Las señales ruidosas pueden deberse a vibraciones de la
herramienta conectada al sensor.
Aumente el valor del parámetro de sistema: Time in saturation
before warning
También puede tratarse de un problema eléctrico, tal como una
mala conexión a tierra o un apantallamiento insuficiente de
otros dispositivos, por ejemplo una herramienta eléctrica que
38236, Error de saturación de la entrada del
sensor de fuerza
causa perturbaciones eléctricas en las mediciones.
Descripción
Si la causa probable son las vibraciones, la acción
Los valores de entrada analógicos de la tarjeta de medida
recomendada es intentar construir la herramienta de tal manera
conectada al sensor de fuerza se han saturado y el tiempo de
que se reduzca la vibración. También se puede probar a
saturación ha alcanzado el nivel de error. La tarjeta de medida
ejecutar la instrucción de RAPID fallida manteniendo apagada
está conectada al ordenador de ejes del módulo de
la herramienta que presenta vibraciones durante el FCCalib o
accionamiento [arg format="%d " ordinal="1"].
FCLoadId.
Consecuencias
Si no hay vibraciones visibles, se debería investigar si es un
El sistema se detendrá.
problema de perturbación eléctrica.
Acciones recomendadas
Utilice TuneMaster para comparar las señales 1001-1006 si: El
Acciones recomendadas
Compruebe la carga aplicada al sensor de fuerza/par.
Compruebe que ni el cable, el sensor ni la tarjeta de medida
presenten daños. Incremente el valor del parámetro de sistema:
Time in saturation before error
robot se encuentra en el estado Motors OFF. El robot se está
moviendo lentamente. La herramienta eléctrica está en
funcionamiento. El nivel de sensibilidad para la comprobación
se puede cambiar con el parámetro Noise Level del tipo FC
Sensor del tema Motion. Sin embargo, solo se recomienda
38237, Error de configuración de la tarjeta de
medición de fuerza
cambiar este nivel si se ha llevado a cabo la investigación de
la causa y se demuestra que el nivel es únicamente un poco
bajo.
Descripción
Los valores de entrada de configuración de la tarjeta de
medición de fuerza conectada al sensor de fuerza son erróneos.
La tarjeta está conectada al módulo de accionamiento [arg
format="%d " ordinal="1"], enlace [arg format="%d "
ordinal="2"].
39401, Error de referencia de par-intensidad
Descripción
La referencia de par-intensidad está aumentando con
demasiada rapidez en el eje arg, conectado al módulo de
accionamiento arg.
Consecuencias
El sistema pasa al estado de fallo del sistema.
Consecuencias
Causas probables
Acciones recomendadas
Es posible que la información proporcionada por el resolver
Compruebe la configuración.
sea defectuosa o que la ganancia del bucle de velocidad esté
mal ajustada.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
213
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
39404, Intensidad excesiva en bucle de par
Acciones recomendadas
Compruebe el cable del resolver y la conexión del resolver a
tierra para este eje. Si el eje es un eje adicional, compruebe
que los datos del motor en el archivo de configuración sean
correctos. La forma de comprobar el archivo de configuración
se detalla en el Manual de solución de problemas. Reduzca la
Descripción
El controlador de campo-intensidad ha detectado una intensidad
excesiva para el eje arg, conectado al módulo de accionamiento
arg.
Consecuencias
ganancia del bucle de velocidad.
Causas probables
39402, Aviso de referencia de ángulo de motor
Es posible que los datos de motor de los archivos de
configuración sean incorrectos.
Descripción
La referencia de ángulo de motor está aumentando con
Acciones recomendadas
demasiada rapidez en el eje arg, conectado al módulo de
Compruebe que los datos del motor en el archivo de
accionamiento arg.
configuración sean correctos para este eje. La forma de
comprobar el archivo de configuración se detalla en el Manual
Consecuencias
de solución de problemas. Compruebe que el registro de
Causas probables
eventos no contenga ningún error referido al bus de CC.
Es posible que la información proporcionada por el resolver
sea defectuosa o que la ganancia del bucle de velocidad esté
mal ajustada.
Compruebe que la tensión entrante se encuentre dentro de las
especificaciones. Compruebe que los cables del motor no estén
dañados ni mal conectados.
Acciones recomendadas
Compruebe el cable del resolver y la conexión del resolver a
tierra para este eje. Si el eje es un eje adicional, compruebe
que los datos del motor en el archivo de configuración sean
correctos. La forma de comprobar el archivo de configuración
se detalla en el Manual de solución de problemas. Reduzca la
ganancia del bucle de velocidad.
39405, Valor de PWM máximo alcanzado en el
controlador de par
Descripción
El bucle de control de par-intensidad se ha saturado para el
eje arg, conectado al módulo de accionamiento arg.
Consecuencias
39403, Intensidad insuficiente en bucle de par
Causas probables
Es posible que la tensión de alimentación sea insuficiente o
Descripción
El controlador de par-intensidad ha detectado una intensidad
que los devanados o cables del motor estén rotos.
insuficiente para el eje arg, conectado al módulo de
Acciones recomendadas
accionamiento arg.
Compruebe que el registro de eventos no contenga ningún
error referido al bus de CC. Compruebe que la tensión entrante
Consecuencias
se encuentre dentro de los límites especificados. Compruebe
Causas probables
los cables y devanados del motor para detectar posibles
Es posible que los datos del motor en los archivos de
interrupciones de circuitos.
configuración sean incorrectos o que la tensión del bus de CC
sea demasiado baja.
39406, Intensidad excesiva en bucle de campo
Acciones recomendadas
Compruebe que los datos del motor en el archivo de
configuración sean correctos para este eje. La forma de
comprobar el archivo de configuración se detalla en el Manual
de solución de problemas. Compruebe que el registro de
Descripción
El bucle de campo-intensidad ha generado una intensidad
excesiva para el eje arg, conectado al módulo de accionamiento
arg.
eventos no contenga ningún error referido al bus de CC.
Consecuencias
Compruebe que la tensión entrante se encuentre dentro de las
Causas probables
especificaciones. Compruebe que los cables del motor no estén
Es posible que los datos de motor de los archivos de
dañados ni mal conectados.
configuración sean incorrectos.
Continúa en la página siguiente
214
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Acciones recomendadas
Causas probables
Compruebe que el registro de eventos no contenga ningún
El archivo de configuración puede contener valores incorrectos,
error referido al bus de CC. Compruebe que la alimentación
la clave de configuración puede ser incorrecta o el hardware
entrante se encuentre dentro de los límites especificados.
puede ser de un tipo incorrecto. Si ha sustituido recientemente
Compruebe los cables y devanados del motor.
la unidad de rectificación, es posible que haya montado una
unidad de rectificación con un código de tipo incorrecto o que
39407, Unidad de accionamiento con un código
de tipo incorrecto
no haya reemplazado la clave con una de las combinaciones
Descripción
Acciones recomendadas
El código de tipo de la unidad de accionamiento del eje arg del
Asegúrese de que los valores del archivo de configuración
módulo de accionamiento arg es distinto del especificado en
coincidan con el hardware que tiene instalado. Asegúrese de
el archivo de configuración. La unidad de accionamiento
que la clave de configuración se corresponda con la
instalada es de tipo arg pero el tipo configurado es arg.
combinación de hardware y software que tiene instalada. La
correctas de hardware y software.
forma de comprobar el archivo de configuración se detalla en
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS HALT.
la sección de resolución de problemas. Si ha sustituido
recientemente la unidad rectificadora, asegúrese de utilizar
una unidad que tenga el código de tipo correcto.
Causas probables
El archivo de configuración puede contener valores incorrectos,
la clave de configuración puede ser incorrecta o el hardware
39409, Unidad de condensador con un código
de tipo incorrecto
puede ser de un tipo incorrecto. Si ha sustituido recientemente
la unidad de accionamiento, es posible que haya montado una
unidad de accionamiento con un código de tipo incorrecto o
que no haya reemplazado la clave con una de las
combinaciones correctas de hardware y software.
Descripción
El código de tipo de la unidad de condensador arg del módulo
de accionamiento arg es distinto del especificado en el archivo
de configuración. La unidad de condensador instalada es de
tipo arg pero el tipo configurado es arg.
Acciones recomendadas
Asegúrese de que los valores del archivo de configuración
coincidan con el hardware que tiene instalado. Asegúrese de
que la clave de configuración se corresponda con la
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYSHALT.
combinación de hardware y software que tiene instalada. La
Causas probables
forma de comprobar el archivo de configuración se detalla en
El archivo de configuración puede contener valores incorrectos,
el Manual de solución de problemas. Si ha sustituido
la clave de configuración puede ser incorrecta o el hardware
recientemente la unidad, asegúrese de utilizar una unidad que
puede ser de un tipo incorrecto. Si ha sustituido recientemente
tenga un código de tipo correcto.
la unidad de condensador, es posible que haya montado una
unidad de condensador con un código de tipo incorrecto o que
39408, Unidad rectificadora con un código de
tipo incorrecto
no haya reemplazado la clave con una de las combinaciones
Descripción
Acciones recomendadas
El código de tipo de la unidad rectificadora arg del sistema de
Asegúrese de que los valores del archivo de configuración
accionamiento arg es distinto del especificado en el archivo de
coincidan con el hardware que tiene instalado. Asegúrese de
configuración. La unidad rectificadora instalada es de tipo arg
que la clave de configuración se corresponda con la
pero el tipo configurado es arg.
combinación de hardware y software que tiene instalada. La
correctas de hardware y software.
forma de comprobar el archivo de configuración se detalla en
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS FAIL.
el Manual de solución de problemas. Si ha sustituido
recientemente la unidad de condensador, asegúrese de utilizar
un código de tipo correcto.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
215
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
39410, Aviso de comunicación de unidad de
accionamiento
39412, Demasiadas actualizaciones de referencia
perdida
Descripción
Descripción
Se están detectando muchos errores entre el ordenador de
Se han detectado demasiados paquetes de comunicación
ejes y la unidad de accionamiento arg del módulo de
perdidos en el caso del eje arg del módulo de accionamiento
accionamiento arg. (Número de errores por unidad de tiempo)
arg.
Consecuencias
Consecuencias
Si el número de errores de comunicación sigue aumentando,
No podrá realizar ninguna operación hasta haber corregido el
existe el riesgo de que el controlador se vea forzado a
fallo. El sistema pasa al estado SYSHALT.
detenerse.
Causas probables
Causas probables
Es posible que exista una interrupción en el cable de enlace
Puede existir ruido externo que interfiere con las señales de
de comunicación que une el ordenador de ejes a la unidad de
comunicación.
accionamiento principal, que el módulo de accionamiento no
esté conectado correctamente a tierra o que un ruido excesivo
Acciones recomendadas
Compruebe que el cable de enlace de comunicación que une
interfiera con las señales de comunicación.
el ordenador de ejes a la unidad de accionamiento principal
Acciones recomendadas
esté bien conectado. Compruebe que el módulo esté conectado
Compruebe que el cable de enlace de comunicación que une
correctamente a tierra. Compruebe si existen fuentes externas
el ordenador de ejes a la unidad de accionamiento principal
de ruido electromagnético cerca del módulo de accionamiento.
esté bien conectado. Compruebe que el módulo esté conectado
correctamente a tierra. Compruebe si existen fuentes externas
39411, Demasiados errores de comunicaciones
Descripción
Se han perdido cuatro o más paquetes de comunicación entre
el ordenador de ejes y la unidad de accionamiento arg del
módulo de accionamiento arg.
de ruido electromagnético cerca del módulo de accionamiento.
39413, Software de accionamiento no
sincronizado
Descripción
El software del ordenador de ejes del módulo de accionamiento
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS HALT.
arg ha perdido su sincronización con el software de
accionamiento del eje arg. Se trata de un estado de software
inestable.
Causas probables
Es posible que exista una interrupción en el cable de enlace
de comunicación que une el ordenador de ejes a la unidad de
accionamiento principal, que el módulo de accionamiento no
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYSHALT.
esté conectado correctamente a tierra o que un ruido excesivo
Causas probables
interfiera con las señales de comunicación.
Es posible que se produzcan cortes momentáneos en la
temporización del sistema.
Acciones recomendadas
Compruebe que el cable de enlace de comunicación que une
Acciones recomendadas
el ordenador de ejes a la unidad de accionamiento principal
Reinicie el controlador. Si el problema no desaparece, póngase
esté bien conectado. Compruebe que el módulo esté conectado
en contacto con su representante local de ABB.
correctamente a tierra. Compruebe si existen fuentes externas
de ruido electromagnético cerca del módulo de accionamiento.
39414, Código de tipo de condensador
desconocido
Descripción
El código de tipo de la unidad de condensador arg del módulo
de accionamiento arg no se reconoce en el sistema.
Continúa en la página siguiente
216
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Consecuencias
Causas probables
No podrá realizar ninguna operación hasta haber corregido el
Es posible que exista una interrupción en el cable de enlace
fallo. El sistema pasa al estado SYSHALT.
de comunicación que une el ordenador de ejes a la unidad de
accionamiento principal o que se haya producido un bloqueo
Causas probables
Es posible que se haya montado una unidad de condensador
en el software.
de un tipo incorrecto o que la versión del condensador utilizado
Acciones recomendadas
no se admita en el software.
Compruebe que el cable de enlace de comunicación que une
el ordenador de ejes a la unidad de accionamiento principal
Acciones recomendadas
Compruebe el tipo de la unidad de condensador que tiene
instalada. Sustitúyala si es de un tipo incorrecto. Si el problema
no desaparece, póngase en contacto con su representante
esté bien conectado. Reinicie el controlador. Si el problema no
desaparece, póngase en contacto con su representante local
de ABB.
local de ABB.
39415, Pérdida de comunicación con la unidad
de accionamiento
39417, Imposible encontrar archivo de versión
de softw. unidad accionam.
Descripción
El sistema no puede encontrar en el disco un archivo correcto
Descripción
La comunicación con la unidad de accionamiento número arg
del módulo de accionamiento arg se ha perdido.
de versión de software de la unidad de accionamiento.
Es posible que el archivo haya sido borrado por error. Sin este
archivo no es posible comprobar si es necesario actualizar el
Consecuencias
software de la unidad de accionamiento.
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYSHALT.
Acciones recomendadas
Póngase en contacto con su representante local de ABB.
Causas probables
Es posible que exista una interrupción en el cable de enlace
de comunicación que une el ordenador de ejes a la unidad de
accionamiento principal, que el módulo de accionamiento no
39418, Código de tipo de unidad de
accionamiento desconocido
esté conectado correctamente a tierra o que un ruido excesivo
Descripción
interfiera con las señales de comunicación.
El código de tipo de la unidad de accionamiento arg del módulo
de accionamiento arg no se reconoce en el sistema. La unidad
Acciones recomendadas
Compruebe que el cable de enlace de comunicación que une
el ordenador de ejes a la unidad de accionamiento principal
de accionamiento instalada es de tipo arg pero el tipo
configurado es arg.
esté bien conectado. Compruebe que el módulo esté conectado
Consecuencias
correctamente a tierra. Compruebe si existen fuentes externas
No podrá realizar ninguna operación hasta haber corregido el
de ruido electromagnético cerca del módulo de accionamiento.
fallo. El sistema pasa al estado SYSHALT.
Causas probables
39416, Sin respuesta de la unidad de
accionamiento
La conexión a la unidad de accionamiento puede ser incorrecta
Descripción
Acciones recomendadas
La unidad de accionamiento principal del módulo de
Asegúrese de las conexiones de los cables de la unidad de
accionamiento arg no responde.
accionamiento se encuentren en buen estado. Asegúrese de
o es posible que el hardware se encuentre en mal estado.
que la unidad de accionamiento sea de un tipo admitido por
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYSHALT.
este controlador. Si ha sustituido recientemente la unidad,
asegúrese de utilizar una unidad que tenga un código de tipo
correcto.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
217
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
39419, Código de tipo de rectificador
desconocido
Causas probables
La conexión a la unidad de accionamiento puede ser incorrecta
o es posible que se haya montado un hardware incorrecto.
Descripción
El código de tipo de la unidad de rectificación arg del módulo
Acciones recomendadas
de accionamiento arg no se reconoce en el sistema. La unidad
Realice un cierre y vuelva a iniciar el sistema. Si el problema
de rectificación instalada es de tipo arg pero el tipo configurado
no desaparece, aísle la unidad de accionamiento defectuosa
es arg.
y sustitúyala.
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYSHALT.
39422, Tiempo límite agotado en la supervisión
de la unidad de accionamiento
Descripción
Causas probables
La conexión a la unidad de accionamiento puede ser incorrecta
o es posible que el hardware se encuentre en mal estado.
El tiempo límite del temporizador de supervisión de la unidad
de accionamiento número arg del módulo de accionamiento
arg ha caducado.
Acciones recomendadas
Asegúrese de que las conexiones de los cables de la unidad
de rectificación sean correctas. Asegúrese de que la unidad
de rectificación sea de uno de los tipos admitidos por este
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYSHALT.
controlador. Si ha sustituido la unidad de rectificación
Causas probables
recientemente, asegúrese de que ha utilizado una que tenga
La conexión a la unidad de accionamiento puede ser incorrecta
un código de tipo correcto.
o es posible que se haya montado un hardware incorrecto.
También puede deberse a un error interno de la unidad de
39420, Fallo de autocomprobación de la unidad
de accionamiento
accionamiento.
Descripción
Realice un cierre y vuelva a iniciar el sistema. Si el problema
La unidad de accionamiento número arg del Drive Module arg
no desaparece, aísle la unidad de accionamiento defectuosa
ha detectado un fallo de hardware interno.
y sustitúyala.
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS HALT.
Acciones recomendadas
39423, Aviso interno de la unidad de
accionamiento
Descripción
Causas probables
El software de pruebas no funciona correctamente o existe una
Aviso interno de medición en la unidad de accionamiento
número arg del módulo de accionamiento arg.
avería en el hardware.
Consecuencias
Acciones recomendadas
Cierre el controlador y reinícielo. Si el problema no desaparece,
aísle la unidad de accionamiento defectuosa y sustitúyala.
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYSHALT.
Causas probables
39421, Fallo de prueba de configuración de la
unidad de accionamiento
Es posible que exista algún problema con el cable de control,
la conexión del rectificador (barra de bus o cable) o el hardware
interno.
Descripción
La unidad de accionamiento número arg del módulo de
Acciones recomendadas
accionamiento arg ha detectado un error interno.
Compruebe que los cables de control y la conexión del
rectificador (la barra de bus o el cable) estén insertados de la
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
forma adecuada para esta unidad. Reinicie el sistema.
fallo. El sistema pasa al estado SYSHALT.
Continúa en la página siguiente
218
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
39424, Error interno de la unidad de
accionamiento
39426, Fallo interno del rectificador
Descripción
El rectificador del enlace de comunicaciones arg conectado al
Aviso interno de medición en la unidad de accionamiento
Drive Module [arg format="%d " ordinal="1"] ha detectado un
número arg del módulo de accionamiento arg.
fallo interno.
Consecuencias
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYSHALT.
fallo. El sistema pasa al estado SYS HALT.
Causas probables
Causas probables
La conexión a la unidad de accionamiento puede ser incorrecta
Puede deberse a una conexión de señal defectuosa o no
o es posible que se haya montado un hardware incorrecto.
existente entre el rectificador y las unidades de accionamiento.
También puede deberse a una avería en el cable de control, la
conexión del rectificador (barra de bus o cable) o el hardware
interno.
Descripción
Acciones recomendadas
Asegúrese de que el cable de señal esté conectado
correctamente entre el rectificador y la unidad de
Acciones recomendadas
accionamiento. Compruebe los LED de indicación del
Asegúrese de que los cables de control y la conexión del
rectificador y las unidades de accionamiento. El significado de
rectificador (barra de bus o cable) estén conectados
los LED se describe en el Manual de solución de problemas.
correctamente para esta unidad. Cierre el sistema y reinícielo.
Si el problema no desaparece, aísle la unidad defectuosa y
sustitúyala.
39427, Falta la comunicación con el rectificador
Descripción
39425, Fallo de medición de la unidad de
accionamiento
Descripción
La comunicación con el rectificador del enlace de
comunicaciones de accionamiento arg del módulo de
accionamiento arg se ha perdido.
Consecuencias
Un circuito de medición de intensidad de la unidad de
accionamiento número arg del módulo de accionamiento arg
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYSHALT.
y conectada al eje arg ha fallado.
Causas probables
Consecuencias
Puede deberse a una conexión de señal defectuosa o no
No podrá realizar ninguna operación hasta haber corregido el
existente entre el rectificador y las unidades de accionamiento.
fallo. El sistema pasa al estado SYSHALT.
Acciones recomendadas
Causas probables
Asegúrese de que el cable de señal esté conectado
Puede deberse a una conexión de rectificador defectuosa o no
existente entre el rectificador y las unidades de accionamiento.
Acciones recomendadas
correctamente entre el rectificador y la unidad de
accionamiento. Cierre el sistema y reinícielo. Si el problema
no desaparece, aísle la unidad defectuosa y sustitúyala.
Asegúrese de que la conexión de rectificador (barra de bus o
cable) sea correcta entre el rectificador y la unidad de
accionamiento. Compruebe los LEDs de indicación del
rectificador y las unidades de accionamiento. El significado de
los LEDs se describe en el Manual de solución de problemas.
39428, Error de inicio de rectificador
Descripción
El rectificador del enlace de comunicaciones de unidad arg
conectado al módulo de accionamiento arg ha detectado un
fallo de inicio.
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYSHALT.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
219
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Causas probables
Consecuencias
Puede deberse a un error interno de la unidad de rectificación.
No es posible utilizar el robot.
Acciones recomendadas
Causas probables
Asegúrese de que el cable de señal esté conectado
Existen varios errores que pueden provocar esta situación.
correctamente entre el rectificador y la unidad de
accionamiento. Cierre el sistema y reinícielo. Si el problema
no desaparece, aísle la unidad de rectificación defectuosa y
sustitúyala.
Acciones recomendadas
Apague la alimentación principal del módulo y vuelva a
encenderla. ¡Recuerde que un reinicio normal NO será
suficiente! Si el problema no desaparece, sustituya la unidad
de accionamiento.
39431, Actualización de software de unidad de
accionamiento en curso
Descripción
El software de la unidad de accionamiento del módulo de
accionamiento arg se está actualizando.
Espere a que se complete la actualización. Esta operación
tardará aproximadamente 3,5 minutos.
39435, Imposible encontrar la un. accionamiento
de un eje adicional
Descripción
El sistema no puede detectar ninguna unidad de accionamiento
de eje adicional para el eje arg del módulo de accionamiento
arg.
NOTA: No apague la alimentación ni reinicie el controlador
hasta que la descarga se haya completado.
Consecuencias
El sistema pasa al estado SYS_FAIL.
Acciones recomendadas
Causas probables
Espere, por favor...
Puede deberse a una de las causas siguientes: Existe un eje
39432, Versión de robot incompatible en unidad
de accionamiento
adicional configurado pero no existe la unidad de accionamiento
en el módulo de accionamiento. Existe una unidad de
accionamiento externa pero el cable no está conectado a la
Descripción
posición de conector Xarg de la unidad de accionamiento
La versión de arranque del módulo de accionamiento arg es
principal. Cable dañado entre la unidad de accionamiento del
de la versión arg, que no está permitida. La última versión de
eje adicional y la unidad de accionamiento principal.
arranque permitida es la arg.
Acciones recomendadas
Consecuencias
Compruebe que el módulo de accionamiento contenga un
No podrá realizar ninguna operación hasta haber corregido el
número suficiente de unidades de accionamiento de ejes
fallo. El sistema pasa al estado SYSHALT.
adicionales. Compruebe que la clave de configuración no defina
Causas probables
más unidades de accionamiento externas de las que están
La versión del módulo de arranque no es compatible con la
conectadas al módulo de accionamiento. Compruebe que el
versión del hardware.
cable que une la unidad de accionamiento del eje adicional y
la unidad de accionamiento principal esté bien insertado y en
Acciones recomendadas
Sustituya la unidad de accionamiento con una que utilice una
versión de arranque igual o posterior a la última versión
permitida.
39434, Fallo de inicio de la unidad de
accionamiento
la posición de conector correcta. Si el cable existe y está
conectado correctamente, es posible que esté dañado y deba
sustituirlo.
39440, Circuito abierto en circuito de resistencia
de drenaje
Descripción
Descripción
La unidad de accionamiento del módulo de accionamiento arg
no se ha iniciado correctamente. Estado de arranque de unidad
de accionamiento = arg. Estado de unidad de accionamiento
La resistencia de drenaje conectada al rectificador del enlace
de accionamiento arg del módulo de accionamiento arg tiene
el circuito abierto.
dsp1 = arg
Continúa en la página siguiente
220
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Consecuencias
Causas probables
No podrá realizar ninguna operación hasta haber corregido el
Es posible que las resistencias de drenaje tengan una
fallo. El sistema pasa al estado SYSHALT.
resistencia nominal insuficiente o que una de las resistencias
de drenaje haya fallado, provocando un cortocircuito.
Causas probables
Puede deberse a fallos en el cable de la resistencia de drenaje
Acciones recomendadas
o en la resistencia de drenaje.
Compruebe las resistencias de drenaje para comprobar si
tienen una resistencia nominal correcta para esta configuración
Acciones recomendadas
Asegúrese de que el cable de la resistencia de drenaje esté
conectado correctamente a la unidad de rectificación.
Asegúrese de que el cable y la resistencia funcionen
de módulo de accionamiento. Compruebe que ninguna de las
resistencias haya fallado. La forma de comprobar el archivo de
configuración se detalla en el Manual de solución de problemas.
correctamente. Para ello, mida sus respectivas resistencias.
Desconecte antes de la medición. Sustituya cualquier
componente defectuoso.
39443, Aviso de sobrecarga de resistencias de
drenaje
Descripción
39441, Cortocircuito en circuito de resistencia
de drenaje
La potencia consumida por las resistencias de drenaje se
acerca al valor de sobrecarga para el rectificador del enlace de
comunicación de la unidad arg del módulo de accionamiento
Descripción
La resistencia de drenaje conectada al rectificador del enlace
arg.
de accionamiento arg del módulo de accionamiento arg
Consecuencias
presenta un cortocircuito.
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS HALT.
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
Causas probables
fallo. El sistema pasa al estado SYSHALT.
Es posible que el programa del usuario haga un uso excesivo
de la frenada brusca de los manipuladores, algo que es más
Causas probables
Puede deberse a fallos en el cable de la resistencia de drenaje
o en la resistencia de drenaje.
probable si el sistema contiene ejes adicionales.
Acciones recomendadas
Escriba de nuevo el programa del usuario para reducir la
Acciones recomendadas
Asegúrese de que el cable de la resistencia de drenaje esté
utilización de la frenada brusca.
conectado correctamente a la unidad de rectificación.
correctamente. Para ello, mida sus respectivas resistencias.
39444, Error de sobrecarga de resistencias de
drenaje
Desconecte antes de la medición. Sustituya cualquier
Descripción
componente defectuoso.
Las resistencias de drenaje han sido sobrecargadas para el
Asegúrese de que el cable y la resistencia funcionen
rectificador del enlace de comunicación de la unidad arg del
39442, Resistencia de drenaje insuficiente
módulo de accionamiento arg.
Descripción
Consecuencias
La resistencia de drenaje es insuficiente para el rectificador del
No podrá realizar ninguna operación hasta haber corregido el
enlace de comunicación de la unidad arg del módulo de
fallo. El sistema pasa al estado SYS HALT.
accionamiento arg.
Causas probables
Consecuencias
Es posible que el programa del usuario contenga un uso
No podrá realizar ninguna operación hasta haber corregido el
excesivo de los frenos o una carga útil excesiva en los
fallo. El sistema pasa al estado SYSHALT.
manipuladores. Esto es más probable si el sistema contiene
ejes adicionales.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
221
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Acciones recomendadas
Acciones recomendadas
Escriba de nuevo el programa del usuario para reducir la
Compruebe que el cable del ventilador esté conectado
utilización de la frenada brusca.
correctamente. Sustituya la unidad de ventilador defectuosa.
39450, Alimentación de la unidad de ventilador
en mal estado
39453, Fallo de ventilador de refrigeración del
transformador
Descripción
Descripción
La alimentación de la unidad de ventilador del módulo de
El ventilador del transformador que alimenta al módulo de
accionamiento arg no está dentro de sus límites de tensión
accionamiento arg ha fallado.
permitidos.
Acciones recomendadas
Consecuencias
Compruebe si el cable del ventilador está conectado
correctamente. Sustituya la unidad de ventilador defectuosa.
Causas probables
Es posible que la unidad de alimentación principal de los
ventiladores esté defectuosa o que la alimentación
39460, Tensión insuficiente en el rectificador
proporcionada a esta unidad de alimentación no se encuentre
Descripción
dentro de los límites de tensión permitidos.
La tensión del rectificador es insuficiente para el rectificador
Acciones recomendadas
del enlace de comunicación de la unidad arg del módulo de
Compruebe si el cable está bien insertado. Compruebe que
accionamiento arg.
todos los ventiladores funcionen correctamente. Compruebe
Consecuencias
la tensión de entrada de la unidad de alimentación principal de
No podrá realizar ninguna operación hasta haber corregido el
los ventiladores. Sustituya cualquier unidad defectuosa.
fallo. El sistema pasa al estado SYSHALT.
39451, Fallo de unidad de ventilador
Causas probables
Es posible que la barra de bus del rectificador no esté
Descripción
conectada correctamente o que la alimentación trifásica se
La unidad de ventilador del módulo de accionamiento arg ha
haya interrumpido mientras el robot se encontraba en el estado
fallado.
Motores ON. Es posible que el contactor principal también se
haya abierto mientras el robot se encuentra en el estado
Consecuencias
Motores ON (interrumpiendo la cadena de seguridad). También
Causas probables
es posible que la alimentación principal entrante sea
Es posible que la unidad de ventilador esté defectuosa, que se
insuficiente.
haya producido una caída de alimentación o que el cable de
alimentación del ventilador no esté conectado correctamente.
Acciones recomendadas
Asegúrese de que la barra de bus del rectificador esté
Acciones recomendadas
conectada correctamente. Asegúrese de que la alimentación
Asegúrese de que el cable el ventilador esté conectado
correctamente. Asegúrese de que todos los ventiladores
funcionan correctamente y de que el flujo de aire no esté
obstruido. Mida la tensión de salida de la unidad de
alimentación que proporciona la alimentación al ventilador.
principal no se haya interrumpido. Asegúrese de que la cadena
de seguridad no se haya interrumpido. Asegúrese de que la
tensión de salida de la fuente de alimentación del módulo de
accionamiento se encuentre dentro de los límites aceptables
especificados en el Manual del producto.
Sustituya cualquier unidad defectuosa.
39452, Fallo de ventilador de refrigeración del
ordenador de ejes
39461, Tensión excesiva en el rectificador
Descripción
La tensión del rectificador es excesiva para el rectificador del
Descripción
enlace de comunicación de la unidad arg del módulo de
El ventilador de refrigeración del computador de ejes en el
accionamiento arg.
módulo de accionamiento arg ha fallado.
Continúa en la página siguiente
222
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Consecuencias
Causas probables
No podrá realizar ninguna operación hasta haber corregido el
Puede deberse a la presencia de polvo o restos metálicos en
fallo. El sistema pasa al estado SYS HALT.
los contactos o los devanados del motor.
Causas probables
Acciones recomendadas
Es posible que el programa del usuario haga un uso excesivo
No se requiere ninguna acción si el problema desaparece por
de la frenada brusca de los manipuladores, algo que es más
sí solo.
probable si el sistema contiene ejes adicionales. También es
posible que las resistencias de freno estén defectuosas.
39464, Cortocircuito en circuito de fase de motor
Acciones recomendadas
Descripción
Compruebe las resistencias de drenaje para comprobar si
El motor o el cable de motor del eje arg del módulo de
tienen una resistencia nominal correcta para esta configuración
accionamiento arg y la unidad de accionamiento número arg
de módulo de accionamiento. Compruebe que ninguna de las
es un cortocircuito.
resistencias haya fallado. Si es posible, escriba de nuevo el
programa del usuario para reducir la utilización de la frenada
brusca.
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYSHALT.
39462, Tensión de rectificador en nivel crítico
Causas probables
Puede deberse a un motor o un cable de motor en mal estado.
Descripción
También puede estar causado por la existencia de
La tensión del rectificador se encuentra en un nivel crítico para
el rectificador del enlace de comunicación de la unidad arg del
contaminación en los contactores de los cables o a una avería
en los devanados del motor.
módulo de accionamiento arg.
Acciones recomendadas
Consecuencias
Asegúrese de que el cable del motor esté conectado
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS HALT.
correctamente a la unidad de accionamiento. Compruebe el
cable y el motor midiendo sus respectivas resistencias.
Causas probables
Desconecte antes de la medición. Sustituya cualquier
Es posible que el programa del usuario haga un uso excesivo
componente defectuoso.
de la frenada brusca de los manipuladores, algo que es más
probable si el sistema contiene ejes adicionales. También es
posible que las resistencias de freno estén defectuosas.
39465, Aviso de intensidad de motor
Descripción
Acciones recomendadas
La intensidad del motor es superior a la permitida para el eje
Compruebe las resistencias de drenaje para comprobar si
arg del módulo de accionamiento arg, unidad de accionamiento
tienen una resistencia nominal correcta para esta configuración
número arg, es excesiva.
de módulo de accionamiento. Compruebe que ninguna de las
resistencias haya fallado. Escriba de nuevo el programa del
usuario para reducir la utilización de frenadas bruscas.
Consecuencias
Causas probables
Es posible que la carga del motor sea excesiva o que el motor
39463, Aviso de cortocircuito en fase de motor
se haya bloqueado (quizá a causa de una colisión).
Acciones recomendadas
Descripción
Se ha detectado un breve cortocircuito en el motor o el cable
del motor conectado al eje arg en el módulo de accionamiento
Compruebe que el robot no haya colisionado con ningún
elemento. Si es posible, reduzca la velocidad del programa de
usuario. Si el eje es un eje adicional, compruebe que la carga
arg.
del motor no sea excesiva para la unidad de accionamiento.
Consecuencias
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
223
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
39466, Sobrecarga de intensidad del motor
accionamiento arg, que es el segundo nivel anormal de los tres
existentes.
Descripción
La intensidad del motor del eje arg del módulo de accionamiento
Consecuencias
arg, unidad de accionamiento número arg, es excesiva.
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS HALT.
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
Causas probables
fallo. El sistema pasa al estado SYS HALT.
Es posible que la temperatura ambiente sea excesiva, que los
ventiladores de refrigeración hayan fallado o que el programa
Causas probables
Es posible que la carga del motor sea excesiva o que el motor
se haya bloqueado (quizá a causa de una colisión).
de usuario consuma más intensidad de la que puede suministrar
el sistema de accionamiento.
Acciones recomendadas
Acciones recomendadas
Compruebe que el robot no haya colisionado. Si es posible,
reduzca la velocidad del programa de usuario. Si el eje es un
eje adicional, compruebe que la carga del motor no sea
excesiva para la unidad de accionamiento.
39467, Aviso de temperatura de unidad de
accionamiento
Descripción
La temperatura ha aumentado por encima del nivel de aviso
en la unidad de accionamiento número arg del módulo de
accionamiento arg, que es el nivel anormal más bajo de los
tres existentes.
Compruebe que los ventiladores estén funcionando y que el
flujo de aire no esté obstruido. Compruebe que la temperatura
ambiente no sobrepase el límite nominal del armario. Si el
sistema contiene ejes externos, compruebe que los motores
no sean demasiado grandes para las unidades de
accionamiento. Si es posible, escriba de nuevo el programa
del usuario para reducir las aceleraciones bruscas.
39469, Temperatura crítica en la unidad de
accionamiento
Descripción
La temperatura ha aumentado por encima del nivel crítico en
la unidad de accionamiento número arg del módulo de
Consecuencias
accionamiento arg, que es el nivel anormal máximo de los tres
Causas probables
existentes.
Es posible que la temperatura ambiente sea excesiva, que los
Consecuencias
ventiladores de refrigeración hayan fallado o que el programa
No podrá realizar ninguna operación hasta haber corregido el
de usuario consuma más intensidad de la que puede suministrar
fallo. El sistema pasa al estado SYS HALT.
el sistema de accionamiento.
Causas probables
Acciones recomendadas
Es posible que la temperatura ambiente sea excesiva, que los
Compruebe que los ventiladores estén funcionando y que el
ventiladores de refrigeración hayan fallado o que el programa
flujo de aire no esté obstruido. Compruebe que la temperatura
de usuario consuma más intensidad de la que puede suministrar
ambiente no sobrepase el límite nominal del armario. Si el
el sistema de accionamiento.
sistema contiene ejes externos, compruebe que los motores
no sean demasiado grandes para las unidades de
accionamiento. Si es posible, escriba de nuevo el programa
del usuario para reducir las aceleraciones bruscas.
39468, Alarma de temperatura de unidad de
accionamiento
Acciones recomendadas
Compruebe que los ventiladores estén funcionando y que el
flujo de aire no esté obstruido. Compruebe que la temperatura
ambiente no sobrepase el límite nominal del armario. Si el
sistema contiene ejes externos, compruebe que los motores
no sean demasiado grandes para las unidades de
accionamiento. Si es posible, escriba de nuevo el programa
del usuario para reducir las aceleraciones bruscas.
Descripción
La temperatura ha aumentado por encima del nivel de alarma
en la unidad de accionamiento número arg del módulo de
Continúa en la página siguiente
224
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
39470, Aviso de semiconductor de alimentación
39472, Falta una fase de entrada de alimentación
Descripción
Descripción
El semiconductor de alimentación se acerca a la sobrecarga
El rectificador conectado al enlace de comunicación arg del
en el eje arg de la unidad de accionamiento número arg del
Drive Module arg detecta la pérdida de potencia en una fase.
módulo de accionamiento arg
Consecuencias
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS HALT.
Causas probables
Es posible que la carga del motor sea excesiva, que el motor
Causas probables
se haya bloqueado (quizá a causa de una colisión) o que la
Esto puede deberse a una caída de alimentación real o a un
refrigeración sea insuficiente.
fallo de los contactores de Motors ON o sus cables o de otra
parte de la cadena trifásica del interior del armario. En raras
Acciones recomendadas
Compruebe que el robot no haya colisionado. Compruebe que
los ventiladores estén funcionando y que el flujo de aire no
esté obstruido. Compruebe que la temperatura ambiente no
ocasiones, este fallo puede producirse en combinación con
otros fallos, en cuyo caso los encontrará en el registro de
errores.
sobrepase el límite nominal del armario. Si el sistema contiene
Acciones recomendadas
ejes externos, compruebe que los motores no sean demasiado
Asegúrese de que el interruptor principal esté cerrado y de que
grandes para las unidades de accionamiento. Si es posible,
exista tensión principal. La ausencia de voltaje indica que el
escriba de nuevo el programa del usuario para reducir las
problema está en el conector del cable de alimentación o la
aceleraciones bruscas.
red eléctrica de la planta. Si la tensión es correcta, desconecte
el cable de entrada de alimentación principal y mida la
39471, Error de sobrecarga de semiconductor
de alimentación
resistencia de las tres fases a lo largo de todos los
componentes de la cadena de alimentación trifásica. Empiece
por el contactor más cercano al rectificador y retroceda hacia
Descripción
El semiconductor de alimentación se ha sobrecargado en el
eje arg de la unidad de accionamiento número arg del módulo
de accionamiento arg
el interruptor de alimentación principal. Los contactores pueden
cerrarse manualmente para realizar la prueba. Consulte los
diagramas eléctricos del armario. Compruebe los LEDs de
indicación de la unidad de rectificación. El significado de los
Consecuencias
LEDs se describe en el Manual de solución de problemas. Si
No podrá realizar ninguna operación hasta haber corregido el
la tensión es correcta, compruebe otros mensajes de error que
fallo. El sistema pasa al estado SYS HALT.
se hayan producido al mismo tiempo para determinar la causa.
Causas probables
Es posible que la carga del motor sea excesiva, que el motor
se haya bloqueado (quizá a causa de una colisión) o que la
refrigeración sea insuficiente.
39473, Faltan todas las fases de entrada de
alimentación
Descripción
Acciones recomendadas
El rectificador conectado al enlace de comunicación arg del
Compruebe que el robot no haya colisionado. Compruebe que
Drive Module arg detecta la pérdida de potencia en una o varias
los ventiladores estén funcionando y que el flujo de aire no
fases.
esté obstruido. Compruebe que la temperatura ambiente no
sobrepase el límite nominal del armario. Si el sistema contiene
ejes externos, compruebe que los motores no sean demasiado
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS HALT.
grandes para las unidades de accionamiento. Si es posible,
escriba de nuevo el programa del usuario para reducir las
Causas probables
Esto puede deberse a una caída de alimentación real o a un
aceleraciones bruscas.
fallo de los contactores de Motors ON o sus cables o de otra
parte de la cadena trifásica del interior del armario. En raras
ocasiones, este fallo puede producirse en combinación con
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
225
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
otros fallos, en cuyo caso los encontrará en el registro de
Acciones recomendadas
errores.
Si es posible, escriba de nuevo el programa del usuario para
reducir las aceleraciones bruscas.
Acciones recomendadas
Asegúrese de que el interruptor principal esté cerrado y de que
exista tensión principal. La ausencia de voltaje indica que el
39476, Aviso de temperatura de rectificador
problema está en el conector del cable de alimentación o la
Descripción
red eléctrica de la planta. Si la tensión es correcta, desconecte
La temperatura de la unidad de rectificación conectada al enlace
el cable de entrada de alimentación principal y mida la
de comunicaciones de accionamiento arg del módulo de
resistencia de las tres fases a lo largo de todos los
accionamiento arg se está acercando a un nivel excesivo.
componentes de la cadena de alimentación trifásica. Empiece
por el contactor más cercano al rectificador y retroceda hacia
el interruptor de alimentación principal. Los contactores pueden
cerrarse manualmente para realizar la prueba. Consulte los
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS HALT.
diagramas eléctricos del armario. Compruebe los LEDs de
Causas probables
indicación de la unidad de rectificación. El significado de los
Es posible que los ventiladores de refrigeración estén
LEDs se describe en el Manual de solución de problemas. Si
defectuosos o que el flujo de aire esté obstruido. Es posible
la tensión es correcta, compruebe otros mensajes de error que
que la temperatura ambiente sea excesiva o que el sistema
se hayan producido al mismo tiempo para determinar la causa.
esté funcionando con una carga excesiva durante periodos
largos.
39474, Aviso de intensidad de rectificador
Acciones recomendadas
Compruebe que los ventiladores estén funcionando y que el
Descripción
El rectificador conectado al enlace de comunicaciones de
accionamiento arg del módulo de accionamiento arg está cerca
flujo de aire no esté obstruido. Compruebe que la temperatura
ambiente no sobrepase el límite nominal del armario. Si el
sistema contiene ejes externos, compruebe que los motores
de la sobrecarga.
no sean demasiado grandes para las unidades de
Consecuencias
accionamiento. Si es posible, escriba de nuevo el programa
No podrá realizar ninguna operación hasta haber corregido el
del usuario para reducir las aceleraciones bruscas.
fallo. El sistema pasa al estado SYSHALT.
39477, Error de temperatura de rectificador
Causas probables
Es posible que la intensidad total del motor sea mayor que la
que puede suministrar el rectificador.
Descripción
La temperatura de la unidad de rectificación conectada al enlace
Acciones recomendadas
de comunicaciones de accionamiento arg del módulo de
Si es posible, escriba de nuevo el programa del usuario para
accionamiento arg ha alcanzado un nivel excesivo.
reducir las aceleraciones bruscas.
Consecuencias
39475, Error de intensidad de rectificador
Descripción
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS HALT.
Causas probables
El rectificador conectado al enlace de comunicaciones de
accionamiento arg del módulo de accionamiento arg ha
alcanzado el nivel de sobrecarga.
Es posible que los ventiladores de refrigeración estén
defectuosos o que el flujo de aire esté obstruido. Es posible
que la temperatura ambiente sea excesiva o que el sistema
Consecuencias
esté funcionando con una carga excesiva durante periodos
No podrá realizar ninguna operación hasta haber corregido el
largos.
fallo. El sistema pasa al estado SYSHALT.
Acciones recomendadas
Causas probables
Compruebe que los ventiladores estén funcionando y que el
Es posible que la intensidad total del motor sea mayor que la
flujo de aire no esté obstruido. Compruebe que la temperatura
que puede suministrar el rectificador.
ambiente no sobrepase el límite nominal del armario. Si el
Continúa en la página siguiente
226
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
sistema contiene ejes externos, compruebe que los motores
Si es posible, escriba de nuevo el programa del usuario para
no sean demasiado grandes para las unidades de
reducir las aceleraciones bruscas.
accionamiento. Si es posible, escriba de nuevo el programa
del usuario para reducir las aceleraciones bruscas.
39478, Error de temperatura de PTC de motor
interno
Descripción
39482, Tensión de alimentación excesiva
Descripción
La tensión de alimentación detectada en el módulo de
accionamiento arg es excesiva.
Consecuencias
La temperatura de uno o varios motores del robot conectados
No es posible utilizar el robot.
al módulo de accionamiento arg ha alcanzado un nivel excesivo.
Causas probables
Consecuencias
Es posible que el transformador de alimentación no esté
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS HALT.
Causas probables
cableado correctamente o que la tensión de la alimentación
externa sea excesiva.
Acciones recomendadas
Es posible que el motor se haya bloqueado (quizá a causa de
una colisión), que el motor se haya sobrecargado o que la
temperatura ambiente sea mayor que la temperatura nominal
del robot.
Mida la tensión de alimentación entrante en el contactor
principal del módulo de accionamiento. Asegúrese de que se
encuentre dentro del rango especificado para este módulo.
Compruebe el cableado del transformador de alimentación de
Acciones recomendadas
la forma detallada en el Manual de producto del robot.
Compruebe que el robot no haya colisionado. Compruebe que
la temperatura ambiente no sobrepase el límite nominal del
robot. Espere a que el robot se enfríe y ejecute de nuevo el
sistema. Sustituya los motores dañados por el calor excesivo.
Si es posible, escriba de nuevo el programa del usuario para
reducir las aceleraciones bruscas.
39483, Cortocircuito de rectificador
Descripción
Se ha detectado un cortocircuito en el rectificador del módulo
de accionamiento arg.
Consecuencias
39479, Error de temperatura de PTC de motor
externo
No es posible utilizar el robot.
Causas probables
Es posible que la barra de bus del rectificador esté mal
Descripción
Uno o varios motores de ejes adicionales conectados al módulo
de accionamiento arg han alcanzado un nivel excesivo.
conectada o que sus superficies de contacto estén
contaminadas, lo que provoca un cortocircuito.
Acciones recomendadas
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS HALT.
Compruebe que todas las barras de bus del rectificador estén
conectadas correctamente. Compruebe que todos los contactos
estén limpios de cualquier contaminación.
Causas probables
Es posible que el motor se haya bloqueado (quizá a causa de
una colisión), que el motor se haya sobrecargado o que la
39484, Cadena de funcionamiento abierta en
estado Motores ON
temperatura ambiente sea mayor que la temperatura nominal
Descripción
del robot.
La cadena de funcionamiento arg está abierta cuando el sistema
Acciones recomendadas
Compruebe que el eje adicional no haya colisionado.
Compruebe que la temperatura ambiente no sobrepase el límite
se encuentra en el estado Motores ON. El problema se produjo
en el sistema de accionamiento arg.
nominal. Espere a que el motor se enfríe y ejecute de nuevo el
Consecuencias
sistema. Sustituya los motores dañados por el calor excesivo.
El sistema pasa al estado SYS_HALT.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
227
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Causas probables
Los cables y las conexiones del sistema de seguridad están
desconectados o dañados. El contactor de esta cadena de
funcionamiento del módulo de accionamiento puede estar
pegado por un problema mecánico en el propio contactor. El
contactor auxiliar del contactor puede presentar un
comportamiento galvánico incorrecto, o bien el cable que va
39500, Aviso de tensión lógica a una unidad de
accionamiento
Descripción
La alimentación de 24 V de la fuente de alimentación del módulo
de accionamiento a la unidad de accionamiento principal del
módulo de accionamiento arg está fuera de rango.
al sistema de seguridad puede estar defectuoso.
Consecuencias
Acciones recomendadas
Causas probables
Compruebe si hay algún contactor de motor adherido. Sustituya
Es posible que la alimentación de 24 V de la fuente de
el contactor de motor defectuoso.
alimentación del módulo de accionamiento esté fuera de rango.
Acciones recomendadas
39485, Cadena de funcionamiento cerrada en
estado Motores OFF
Asegúrese de que el cable de alimentación que va de la fuente
de alimentación del módulo de accionamiento a la unidad de
accionamiento principal esté conectado correctamente.
Descripción
La cadena de funcionamiento arg está abierta cuando el sistema
se encuentra en el estado Motores ON. El problema se produjo
Compruebe si el LED de la unidad de alimentación presenta el
color rojo. El significado completo de todas las indicaciones
de LED se describe en el Manual de solución de problemas del
en el sistema de accionamiento arg.
IRC5.
Consecuencias
El sistema pasa al estado SYS_HALT.
Causas probables
El contactor de esta cadena de funcionamiento en el Drive
Module ha sido cerrado manualmente. El contactor ha quedado
soldado en la posición cerrada.
39501, Error de tensión lógica a una unidad de
accionamiento
Descripción
La alimentación de 24 V a la unidad de accionamiento principal
del módulo de accionamiento arg está fuera de rango.
Acciones recomendadas
Si el contactor no se abre y permanece en la posición cerrada,
apague el sistema y sustituya el contactor. Si el contactor ha
sido cerrado manualmente, tome este mensaje sólo como un
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYSHALT.
Causas probables
aviso.
Es posible que la alimentación de 24 V de la unidad de
39486, Rectificador no conectado
alimentación esté fuera de rango.
Acciones recomendadas
Descripción
La conexión de rectificador al eje utilizado para el accionamiento
arg en el módulo de accionamiento arg, número de unidad de
accionamiento arg falta o no está conectado correctamente.
Asegúrese de que el cable de alimentación que va de la unidad
de alimentación a la unidad de accionamiento principal esté
conectado correctamente. Compruebe si el LED de la unidad
de alimentación presenta el color rojo. El significado completo
Consecuencias
de todas las indicaciones de LED se describe en el Manual de
El sistema pasa al estado SYS_HALT.
solución de problemas del IRC5.
Causas probables
La barra de bus de rectificador no se encuentra o no está bien
conectada. Si la barra de bus está conectada correctamente,
es posible que la unidad que informa del error presente un fallo.
Acciones recomendadas
39502, Error de tensión de lógica a un rectificador
Descripción
La alimentación de 24 V al rectificador del módulo de
accionamiento arg está fuera de rango.
Compruebe que la barra de bus de rectificador esté conectada
correctamente a todas las unidades de accionamiento.
Consecuencias
Continúa en la página siguiente
228
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Causas probables
producirse si el cable de la unidad de alimentación no está
Es posible que el cable que va de la unidad de alimentación al
conectado correctamente al módulo de accionamiento.
rectificador esté mal conectado o que la tensión de la
alimentación suministrada a la unidad de accionamiento esté
fuera de rango.
Acciones recomendadas
Asegúrese de que el cable de alimentación esté conectado
correctamente al módulo de accionamiento. Compruebe el
Acciones recomendadas
cable de alimentación de los frenos para detectar posibles
Compruebe que el cable de alimentación que va de la unidad
cortocircuitos. Asegúrese de que la intensidad total consumida
de alimentación a la unidad de rectificador esté conectado
por los motores de los ejes adicionales no sobrepase las
correctamente. Compruebe la tensión de 24 V del cable de
especificaciones del módulo de accionamiento. Asegúrese de
alimentación que va a la unidad de accionamiento.
que los conectores de alimentación estén conectados
correctamente al ordenador de ejes. Asegúrese de que la
39503, Temperatura excesiva en la fuente de
alimentación
tensión BRAKE de 24 V se encuentre dentro de los límites
especificados. Consulte el diagrama de circuitos del Manual
de producto del IRC5.
Descripción
La temperatura de la fuente de alimentación del módulo de
accionamiento arg ha alcanzado un nivel crítico.
39505, Pérdida de tensión de alimentación a la
unidad de alimentación
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYSHALT.
Descripción
Falta la tensión de alimentación suministrada a la unidad de
alimentación del módulo de accionamiento arg.
Causas probables
Es posible que la unidad de ventilador esté defectuosa, que el
flujo de aire de refrigeración esté obstruido o que la temperatura
Consecuencias
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYSFAIL.
ambiente sea excesiva.
Causas probables
Acciones recomendadas
¡NOTA! No intente reiniciar el controlador durante
aproximadamente diez minutos y espere a que se enfríe.
Asegúrese de que los ventiladores estén funcionando y de que
el flujo de aire no esté obstruido. Asegúrese de que la
temperatura ambiente no sobrepase el límite nominal del
módulo de accionamiento. Asegúrese de que los conectores
de alimentación estén conectados correctamente al ordenador
de ejes.
Es posible que el interruptor de alimentación principal del
módulo de accionamiento esté apagado. Es posible que el
cable de alimentación entrante esté defectuoso (que esté roto)
o que el interruptor de la fuente de alimentación haya saltado.
El fallo también puede producirse si el conector de la unidad
de alimentación no está conectado correctamente al ordenador
de ejes.
Acciones recomendadas
Compruebe que el interruptor de alimentación principal del
39504, Sobrecarga en alimentación a los frenos
módulo de accionamiento esté encendido y reinicie el sistema.
Compruebe que el conector de la unidad de alimentación estén
Descripción
El circuito de alimentación de frenos del módulo de
accionamiento arg consume demasiada intensidad.
Consecuencias
conectado correctamente al ordenador de ejes. Mida la tensión
en el contactor de alimentación para asegurarse de que exista
alimentación. Compruebe que los fusibles de alimentación e
interruptores del módulo de accionamiento no hayan saltado.
No podrá realizar ninguna operación hasta haber corregido el
fallo. El sistema pasa al estado SYS HALT.
Causas probables
39506, Estado de bus de CC incorrecto
Descripción
Es posible que el cable de alimentación de frenos esté
defectuoso (que presente un cortocircuito) o que se estén
utilizando motores de ejes adicionales dotados de frenos que
El bus de CC de una o más unidades de accionamiento
conectadas al Drive Module arg se ha apagado
inesperadamente.
consumen demasiada potencia. El fallo también puede
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
229
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
39522, Ordenador de ejes no encontrado
Consecuencias
El sistema pasa al estado SYS HALT.
Descripción
Causas probables
El ordenador de ejes del Drive Module arg no está conectado
Puede deberse a cables en mal estado o errores internos en
al ordenador principal.
la unidad de accionamiento.
Consecuencias
Acciones recomendadas
El sistema pasa al estado de fallo del sistema. No podrá realizar
Compruebe todos los cables conectados a la unidad de
ninguna operación hasta haber corregido el fallo.
accionamiento. Reinicie el controlador. Sustituya la unidad de
accionamiento si está defectuosa.
Causas probables
Puede deberse a que hay un cable roto o conectores mal
39520, Comunicación perdida con el módulo de
accionamiento
conectados, o bien a una caída de la alimentación eléctrica.
Acciones recomendadas
Asegúrese de que el cable que une el ordenador principal al
Descripción
ordenador de ejes no esté dañado y de que los dos conectores
El ordenador principal ha perdido el contacto con el módulo de
accionamiento arg.
estén conectados correctamente. Asegúrese de que la fuente
de alimentación del ordenador de ejes funcione correctamente.
Consecuencias
Reinicie el controlador.
El sistema pasa al estado SYSHALT. No podrá realizar ninguna
Causas probables
39523, Conectado un ordenador de ejes no
utilizado
Puede deberse a que hay un cable roto o un conector mal
Descripción
conectado, o bien a que existan niveles elevados de
El ordenador de ejes del módulo de accionamiento arg está
interferencias en el cable.
conectado al ordenador principal pero no se está utilizando.
Acciones recomendadas
Causas probables
Asegúrese de que el cable que une el módulo de control al
Puede deberse a un problema de configuración.
operación hasta haber corregido el fallo.
módulo de accionamiento no esté dañado y de que los dos
conectores estén conectados correctamente. Asegúrese de
que no se produzca una emisión de niveles extremos de
interferencia electromagnética cerca de los cables del robot.
39521, Aviso de comunicación de módulo de
accionamiento
Descripción
Se ha detectado un número elevado de errores de comunicación
en el enlace de Ethernet al módulo de accionamiento arg.
Puede deberse a la interferencia de fuentes de ruido externas
Acciones recomendadas
Desconecte el ordenador de ejes no utilizado o configure el
sistema para que utilice el ordenador de ejes. Reinicie el
sistema.
39524, Tiempo límite agotado en comando
enviado a módulo de accionamiento
Descripción
El módulo de accionamiento arg no responde al comando arg.
El sistema ha detenido el programa por motivos de seguridad.
Acciones recomendadas
con el cable.
Compruebe que el módulo de accionamiento esté encendido.
Acciones recomendadas
Compruebe que no haya fuentes de interferencias
electromagnéticas en funcionamiento cerca del cable, el módulo
de accionamiento o el módulo de ordenador.
Compruebe el cable que une el ordenador principal al ordenador
de ejes. Reinicie el sistema.
39525, Error de arranque del módulo de
accionamiento
Descripción
El sistema no ha podido completar la fase de inicialización del
módulo de accionamiento arg.
Continúa en la página siguiente
230
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.5 3 xxxx
Continuación
Consecuencias
Acciones recomendadas
El sistema pasa al estado de fallo del sistema.
Asegúrese de que el cable que une el ordenador principal al
ordenador de ejes a través del switch no esté dañado y de que
Causas probables
El sistema no ha podido completar la fase de inicialización del
todos los conectores estén conectados correctamente.
Asegúrese de que la fuente de alimentación del ordenador de
módulo de accionamiento.
ejes funcione correctamente. Reinicie el controlador.
Acciones recomendadas
Pruebe de nuevo reiniciando el sistema con el interruptor de
alimentación principal. Compruebe si existen otros mensajes
en el registro de eventos de hardware.
39530, Ordenador de ejes sin comunicación con
el sistema de seguridad
Descripción
39526, Ordenador de ejes no encontrado en el
sistema Multi Move
Se ha perdido la comunicación entre el ordenador de ejes y el
sistema de seguridad del módulo de accionamiento arg.
Consecuencias
Descripción
El ordenador de ejes del Drive Module arg no está conectado
al ordenador principal.
El sistema pasa al estado SYSFAIL.
Causas probables
Esto puede deberse a defectos en el cable de comunicación o
Consecuencias
El sistema pasa al estado de fallo del sistema. No podrá realizar
ninguna operación hasta haber corregido el fallo.
en la conexión entre el ordenador de ejes y el sistema de
seguridad. También puede deberse a la existencia de
interferencias graves o a que el sistema de seguridad se haya
Causas probables
quedado sin alimentación.
Puede deberse a que hay un cable roto, conectores mal
conectados, la falta de un switch del ordenador de ejes, o bien
a una caída de la alimentación eléctrica.
Acciones recomendadas
Compruebe si el cable que une el ordenador de ejes al sistema
de seguridad está intacto y bien conectado. Compruebe la
Acciones recomendadas
alimentación conectada al sistema de seguridad. Asegúrese
Asegúrese de que el interruptor de alimentación principal del
Drive Module arg esté encendido. Asegúrese de que el cable
de que no se produzca una emisión de niveles extremos de
interferencia electromagnética cerca de los cables del robot.
que une el ordenador principal al Drive Module a través del
switch no esté dañado y de que los dos conectores estén
conectados correctamente. Asegúrese de que el cable esté
conectado al puerto correcto del switch del ordenador de ejes.
39531, Prueba de cortes momentáneos en la
cadena de funcionamiento no realizada
Asegúrese de que la unidad de alimentación del Drive Module
Descripción
arg funcione correctamente. Reinicie el controlador.
El test de la cadena de funcionamiento no ha sido realizada.
El problema fue detectado por el sistema de seguridad
39527, Ordenador de ejes no encontrado en el
sistema Multi Move individual
conectado al ordenador de ejes del módulo de accionamiento
arg.
Consecuencias
Descripción
El ordenador de ejes del Drive Module arg no está conectado
al ordenador principal.
El sistema pasa al estado SYSHALT.
Causas probables
Puede deberse a errores internos.
Consecuencias
El sistema pasa al estado de fallo del sistema. No podrá realizar
Acciones recomendadas
ninguna operación hasta haber corregido el fallo.
Póngase en contacto con su oficina de asistencia local de ABB.
Causas probables
Puede deberse a que hay un cable roto, conectores mal
conectados, la falta de un switch del ordenador de ejes, o bien
a una caída de la alimentación eléctrica.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
231
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
5.6 4 xxxx
40001, Error de argumento
parámetro persistente y de que NO sea de sólo lectura.
Asegúrese también de que el argumento NO esté escrito entre
Descripción
El argumento opcional arg ha sido utilizado más de una vez en
una misma llamada a una rutina.
paréntesis ().
40006, Error de argumento
Acciones recomendadas
Asegúrese de que el parámetro opcional no se utilice más de
una vez en la misma llamada a una rutina.
Descripción
El parámetro arg no tiene un valor de argumento opcional.
Acciones recomendadas
40002, Error de argumento
Los únicos parámetros que pueden especificarse por nombre
son los parámetros "switch". Todos los demás deben tener un
Descripción
El argumento arg ha sido especificado para más de un
parámetro.
valor asignado. Asegúrese de que el parámetro tenga un valor.
40007, Error de argumento
Acciones recomendadas
La lista de parámetros de la que se selecciona el parámetro
contiene parámetros excluyentes entre sí. Asegúrese de que
el argumento se utilice para un solo parámetro.
Descripción
El argumento opcional arg no se encuentra en la posición
correcta en la lista de argumentos.
Acciones recomendadas
40003, Error de argumento
Asegúrese de que todos los argumentos se especifiquen en el
mismo orden que los parámetros de la rutina a la que desea
Descripción
Se esperaba un argumento para el parámetro obligatorio arg
pero se ha encontrado el argumento opcional arg.
llamar.
40008, Error de argumento
Acciones recomendadas
Asegúrese de que todos los argumentos se especifiquen en el
mismo orden que los parámetros de la rutina a la que desea
Descripción
Falta una referencia al parámetro opcional arg.
Acciones recomendadas
llamar.
Cada parámetro opcional debe tener un argumento de
40004, Error de argumento
referencia, especificado con el carácter inicial de barra invertida
(\). Cambie el argumento obligatorio a un argumento opcional.
Descripción
El argumento de un parámetro REF arg no es una referencia
a un dato.
40009, Error de argumento
Descripción
Acciones recomendadas
Asegúrese de que el argumento sea una referencia a un dato
Falta una referencia al parámetro opcional arg en un argumento
condicional.
o un parámetro.
Acciones recomendadas
40005, Error de argumento
Cada valor condicional de un parámetro opcional debe hacer
referencia a un parámetro opcional de la rutina desde la que
Descripción
El argumento para el parámetro INOUT arg no es una referencia
variable ni persistente, o es de sólo lectura.
se llama. Cambie el valor condicional.
40010, Error de argumento
Acciones recomendadas
Asegúrese de que el argumento sea una referencia a una
variable, una variable persistente, un parámetro variable o un
Descripción
Falta una referencia al parámetro opcional arg en un argumento
opcional.
Continúa en la página siguiente
232
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40015, Error de declaración de dato
Acciones recomendadas
Cada parámetro obligatorio debe tener un argumento de
referencia, especificado con el carácter inicial de barra invertida
(\). Cambie el argumento opcional a un argumento obligatorio.
Descripción
El número de dimensiones de la matriz es arg, pero sólo puede
ser 1, 2 ó 3.
Acciones recomendadas
40011, Error de argumento
Cambie la expresión de dimensión.
Descripción
El argumento obligatorio arg no se encuentra en la posición
40016, Error de declaración de dato
correcta en la lista de argumentos.
Descripción
Acciones recomendadas
Asegúrese de que todos los argumentos se especifiquen en el
Demasiadas dimensiones en la definición de la matriz.
mismo orden que los parámetros de la rutina a la que desea
Acciones recomendadas
llamar.
Las matrices pueden tener un máximo de 3 dimensiones.
Modifique el programa de forma que no necesite más de 3
40012, Error de argumento
dimensiones.
Descripción
40017, Error de tipo
El argumento "switch" arg tiene un valor.
Descripción
Causas probables
No es posible asignar un valor a un argumento que corresponde
El dato indexado arg, arg no es una matriz.
Acciones recomendadas
a un parámetro "switch".
Sólo los datos que hayan sido declarados como matriz pueden
Acciones recomendadas
ser indexados. Elimine el índice o los índices. Declare el dato
Elimine el valor.
como una matriz.
40013, Error de argumento
40018, Error de tipo
Descripción
La llamada a la rutina arg tiene un número insuficiente de
argumentos.
Descripción
El dato arg, arg no es un registro.
Acciones recomendadas
Acciones recomendadas
Las llamadas a rutinas deben suministrar los valores de todos
los parámetros obligatorios de la rutina a la que se llama. La
lista de argumentos debe tener tantos argumentos como
parámetros tenga la lista de parámetros. Añada más
argumentos para que coincidan con la lista de parámetros.
Los componentes sólo están disponibles para los datos de
registro. Compruebe el tipo y el nombre del dato al que se hace
referencia.
40019, Error de límite
Descripción
40014, Error de argumento
Tarea arg: Error al crear la variable persistente arg.
Se ha producido un error cuando se iba a insertar la variable
Descripción
La llamada a la rutina arg tiene demasiados argumentos.
Acciones recomendadas
No es necesario suministrar ningún argumento además de los
definidos por la lista de parámetros de la rutina a la que se
desea llamar. La lista de argumentos debe tener tantos
persistente en la base de datos.
Ref. de programa. arg.
Consecuencias
La variable persistente creada no puede ser usada en un
programa de RAPID.
argumentos como parámetros tenga la lista de parámetros.
Causas probables
Elimine los argumentos innecesarios de la lista de argumentos.
La memoria de programas está llena o fragmentada.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
233
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40024, Error de tipo
Acciones recomendadas
Compruebe si sería posible dividir las estructuras de datos
grandes en bloques más pequeños. El uso de módulos
instalados puede ahorrar memoria de programas.
40020, Error de declaración de dato
Descripción
Tipo no válido arg en operando izquierdo del operador '+' o '-'
binario.
Acciones recomendadas
Los tipos de operandos permitidos para el operador "+" binario
Descripción
son "num", "pos" y "string", y "num" y "pos" en el caso del
La expresión arg no es una expresión constante.
operador "-" binario. Compruebe los tipos de los operandos.
Acciones recomendadas
Las expresiones situadas dentro de declaraciones de datos
deben ser expresiones constantes. Asegúrese de que ninguna
expresión contenga referencias a variables o variables
persistentes, ni llamadas a funciones.
40025, Error de tipo
Descripción
Tipo no válido arg en el operando del operador '+' o '-' unario.
Acciones recomendadas
Los tipos de operandos permitidos para el operador "+" unario
40021, Error de instrucción
son "num" y "pos". Compruebe los tipos de los operandos.
Descripción
Falta una expresión en la instrucción RETURN.
Causas probables
La instrucción RETURN de una función debe especificar un
valor de función para su retorno.
40026, Error de tipo
Descripción
Tipo no válido arg en operando derecho del operador '+' o '-'
binario.
Acciones recomendadas
Acciones recomendadas
Añada una expresión de valor.
Los tipos de operandos permitidos para el operador "+" binario
son "num", "pos" y "string", y "num" y "pos" en el caso del
40022, Error de tipo
operador "-" binario. Compruebe los tipos de los operandos.
Descripción
Combinación ilegal de tipos de operandos arg y arg para el
operador '*'.
40027, Error de tipo
Descripción
Acciones recomendadas
Tipo no válido arg en el operando izquierdo del operador '/',
Las combinaciones permitidas de tipos de operandos son:
'DIV' o 'MOD'.
"num"*"num", "num"*"pos", "pos"*"num", "pos"*"pos" y
"orient"*"orient". Compruebe los tipos de los operandos.
Acciones recomendadas
El tipo de operando permitido para los operadores "/", "DIV" o
"MOD" es "num". Compruebe los tipos de los operandos.
40023, Error de instrucción
40028, Error de tipo
Descripción
Imposible transferir el control a otra lista de instrucciones.
Descripción
Acciones recomendadas
Tipo no válido arg en el operando derecho del operador '/', 'DIV'
Imposible saltar dentro de una instrucción de flujo de programa.
o 'MOD'.
Asegúrese de que la etiqueta esté situada en la misma lista de
instrucciones que la instrucción GOTO, en el mismo nivel o en
un nivel exterior.
Acciones recomendadas
El tipo de operando permitido para los operadores "/", "DIV" o
"MOD" es "num". Compruebe los tipos de los operandos.
Continúa en la página siguiente
234
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40029, Error de tipo
Acciones recomendadas
El tipo de operando permitido para los operadores "OR", "XOR"
Descripción
Tipo no válido arg en el operando izquierdo del operador '<',
'<=', '>' o '>='.
o "AND" es "bool". Compruebe los tipos de los operandos.
40035, Error de tipo
Acciones recomendadas
El tipo de operando permitido para los operadores "<", "<=",
">" o ">=" es "num". Compruebe los tipos de los operandos.
Descripción
Tipo no válido arg en el operando derecho del operador 'OR',
'XOR' o 'AND'.
40030, Error de tipo
Acciones recomendadas
El tipo de operando permitido para los operadores "OR", "XOR"
Descripción
Tipo no válido arg en el operando derecho del operador '<',
'<=', '>' o '>='.
o "AND" es "bool". Compruebe los tipos de los operandos.
40036, Error de tipo
Acciones recomendadas
El tipo de operando permitido para los operadores "<", "<=",
">" o ">=" es "num". Compruebe los tipos de los operandos.
Descripción
Número incorrecto de índices en la lista de índices de la matriz
arg con arg dimensión o dimensiones.
40031, Error de tipo
Acciones recomendadas
Asegúrese de que el número de índices de la lista de índices
Descripción
Tipo no válido arg en operando izquierdo del operador '*'.
coincida con el número de dimensiones de la matriz de datos
indexada.
Acciones recomendadas
Los tipos de operandos permitidos para el operador "*" son
40037, Error de declaración de dato
"num", "pos" u "orient". Compruebe los tipos de los operandos.
Descripción
LOCAL no válido en una declaración de constante de rutina.
40032, Error de tipo
Acciones recomendadas
Descripción
Tipo no válido arg en operando derecho del operador '*'.
Acciones recomendadas
Sólo las declaraciones de datos de programa pueden tener el
atributo LOCAL. Elimine el atributo LOCAL o traslade la
declaración a una posición que quede fuera de la rutina.
Los tipos de operandos permitidos para el operador "*" son
"num", "pos" u "orient". Compruebe los tipos de los operandos.
40038, Error de declaración de dato
40033, Error de tipo
Descripción
LOCAL no válido en una declaración de variable de rutina.
Descripción
Tipo no válido arg en operando del operador 'NOT'.
Acciones recomendadas
Sólo las declaraciones de datos de programa pueden tener el
Acciones recomendadas
atributo LOCAL. Elimine el atributo LOCAL o traslade la
El tipo de operando permitido para el operador "NOT" es "bool".
declaración a una posición que quede fuera de la rutina.
Compruebe los tipos de los operandos.
40039, Error de nombre
40034, Error de tipo
Descripción
Descripción
Nombre de constante arg ambiguo.
Tipo no válido arg en el operando izquierdo del operador 'OR',
'XOR' o 'AND'.
Acciones recomendadas
Los datos de rutina deben tener nombres exclusivos dentro de
la rutina. Los datos de programa deben tener nombres
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
235
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
exclusivos dentro del módulo. Cambie el nombre del dato o
Acciones recomendadas
cambie el nombre que ha causado el problema.
Las etiquetas deben tener nombres exclusivos dentro de la
rutina. Cambie el nombre de la etiqueta o cambie el nombre
40040, Error de nombre
que ha causado el problema.
Descripción
Nombre de constante global arg ambiguo.
40045, Error de nombre
Descripción
Acciones recomendadas
Los datos globales deben tener nombres exclusivos dentro de
Nombre de módulo arg ambiguo.
todos los tipos, datos, rutinas y módulos globales de todo el
Acciones recomendadas
programa. Cambie el nombre del dato o cambie el nombre que
Los módulos deben tener nombres exclusivos dentro de todos
ha causado el problema.
los tipos, datos, rutinas y módulos globales de todo el
programa. Cambie el nombre del módulo o cambie el nombre
40041, Error de nombre
que ha causado el problema.
Descripción
Nombre de persistente global arg ambiguo.
40046, Error de nombre
Descripción
Acciones recomendadas
Los datos globales deben tener nombres exclusivos dentro de
Nombre de parámetro arg ambiguo.
todos los tipos, datos, rutinas y módulos globales de todo el
Acciones recomendadas
programa. Cambie el nombre del dato o cambie el nombre que
Los parámetros deben tener nombres exclusivos dentro de la
ha causado el problema.
rutina. Cambie el nombre del parámetro o cambie el nombre
que ha causado el problema.
40042, Error de nombre
40047, Error de nombre
Descripción
Nombre de rutina global arg ambiguo.
Descripción
Nombre de variable persistente arg ambiguo.
Acciones recomendadas
Las rutinas globales deben tener nombres exclusivos dentro
Acciones recomendadas
de todos los tipos, datos, rutinas y módulos globales de todo
Los datos de programa deben tener nombres exclusivos dentro
el programa. Cambie el nombre de la rutina o cambie el nombre
del módulo. Cambie el nombre del dato o cambie el nombre
que ha causado el problema.
que ha causado el problema.
40043, Error de nombre
40048, Error de nombre
Descripción
Descripción
Nombre de variable global arg ambiguo.
Nombre de rutina arg ambiguo.
Acciones recomendadas
Acciones recomendadas
Los datos globales deben tener nombres exclusivos dentro de
Las rutinas deben tener nombres exclusivos dentro del módulo.
todos los tipos, datos, rutinas y módulos globales de todo el
Cambie el nombre de la rutina o cambie el nombre que ha
programa. Cambie el nombre del dato o cambie el nombre que
causado el problema.
ha causado el problema.
40049, Error de nombre
40044, Error de nombre
Descripción
Descripción
Nombre de variable arg ambiguo.
Nombre de etiqueta arg ambiguo.
Acciones recomendadas
Los datos de rutina deben tener nombres exclusivos dentro de
la rutina. Los datos de programa deben tener nombres
Continúa en la página siguiente
236
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
exclusivos dentro del módulo. Cambie el nombre del dato o
cambie el nombre que ha causado el problema.
40056, Error de tipo
Descripción
El tipo arg del operando izquierdo del operador '=' o '<>' no es
40050, Error de tipo
un valor ni un semivalor.
Descripción
Acciones recomendadas
Tipos de operandos arg y arg distintos para el operador '+' o
'-' binario.
Los operadores '=' y '<>' sólo pueden aplicarse a expresiones
que sean un valor o un semivalor. Si necesita hacer
Acciones recomendadas
comparaciones, necesitará funciones predefinidas específicas
Los dos operandos de los operadores '+' y '-' deben ser del
del tipo especial.
mismo tipo. Compruebe los tipos de los operandos.
40057, Error de tipo
40051, Error de tipo
Descripción
Descripción
El tipo arg del operando derecho del operador '=' o '<>' no es
Tipos de operandos arg y arg distintos para el operador '=' o
un valor ni un semivalor.
'<>'.
Acciones recomendadas
Acciones recomendadas
Los operadores '=' y '<>' sólo pueden aplicarse a expresiones
Los dos operandos de los operadores '=' y '<>' deben ser del
que sean un valor o un semivalor. Si necesita hacer
mismo tipo. Compruebe los tipos de los operandos.
comparaciones, necesitará funciones predefinidas específicas
del tipo especial.
40052, Error de instrucción
40058, Error de tipo
Descripción
RETURN con expresión sólo permitido en funciones.
Descripción
El tipo de la expresión TEST arg no es un valor ni un semivalor.
Acciones recomendadas
En los procedimientos o las rutinas TRAP, la instrucción
Acciones recomendadas
RETURN no debe especificar ninguna expresión de valor de
La instrucción TEST sólo puede aplicarse a una expresión de
retorno. Elimine la expresión.
valor o de semivalor. Si necesita hacer comparaciones,
necesitará funciones predefinidas específicas del tipo especial.
40054, Error de tipo
40059, Error de declaración de dato
Descripción
Dimensiones diferentes del tipo de matriz (arg) y el agregado
Descripción
(arg).
No se permite usar un marcador de sustitución en lugar de una
expresión de valor al definir una constante con nombre.
Acciones recomendadas
Asegúrese de que el número de expresiones del agregado sea
Acciones recomendadas
igual a la dimensión de la matriz de datos.
Complete la declaración del dato o cambie el nombre del dato
a un marcador de sustitución.
40055, Error de tipo
40060, Error de declaración de dato
Descripción
El tipo del objetivo de asignación arg no es un valor ni un
Descripción
semivalor.
No se permite usar un marcador de sustitución en lugar de una
dimensión de matriz al definir una constante o una variable con
Acciones recomendadas
El tipo del dato al que se desea asignar un valor debe ser un
nombre.
valor o un semivalor. Los datos sin valor sólo pueden ser
Acciones recomendadas
definidos por instrucciones o funciones predefinidas y
Complete la declaración del dato o cambie el nombre del dato
específicas del tipo especial.
a un marcador de sustitución.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
237
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40061, Error de declaración de rutina
40066, Error de declaración de dato
Descripción
Descripción
No se permite usar un marcador de sustitución en lugar de las
No se permite usar un marcador de sustitución en lugar de una
dimensiones de una matriz de parámetro al definir una rutina
expresión de valor inicial al definir una variable con nombre.
con nombre.
Acciones recomendadas
Acciones recomendadas
Complete la declaración del dato o cambie el nombre del dato
Complete la declaración del parámetro o cambie el nombre de
a un marcador de sustitución.
la rutina a un marcador de sustitución.
40067, Error de tipo
40062, Error de nombre
Descripción
Descripción
Número insuficiente de componentes en el agregado de registro
No se permite usar un marcador de sustitución en lugar del
del tipo arg.
nombre de un parámetro al definir una rutina con nombre.
Acciones recomendadas
Acciones recomendadas
Asegúrese de que el número de expresiones del agregado sea
Complete la declaración de la rutina o cambie el nombre de la
igual al número de componentes del tipo de registro.
rutina a un marcador de sustitución.
40068, Error de tipo
40063, Error de declaración de dato
Descripción
Descripción
Número excesivo de componentes en el agregado de registro
No se permite usar un marcador de sustitución en lugar de una
del tipo arg.
expresión de valor inicial al definir una variable persistente con
nombre.
Acciones recomendadas
Asegúrese de que el número de expresiones del agregado sea
Acciones recomendadas
igual al número de componentes del tipo de registro.
Complete la declaración del dato o cambie el nombre del dato
40069, Error de referencia
a un marcador de sustitución.
40064, Error de declaración de rutina
Descripción
Descripción
Referencia de dato arg ambigua.
Acciones recomendadas
No se permite usar un marcador de sustitución en lugar de un
parámetro al definir una rutina con nombre.
Desde esta posición del programa está visible al menos un
objeto más con el mismo nombre que el dato al que se hace
Acciones recomendadas
referencia. Asegúrese de que todos los nombres de objeto
Complete la declaración del parámetro, elimine el marcador de
cumplan las reglas de asignación de nombres en cuanto a que
sustitución o cambie el nombre de la rutina a un marcador de
sean exclusivos.
sustitución.
40070, Error de referencia
40065, Error de referencia
Descripción
Descripción
Referencia ambigua a la función arg.
No se permite usar un marcador de sustitución en lugar de un
tipo al definir un dato, un componente de registro o una rutina.
Acciones recomendadas
Desde esta posición del programa está visible al menos un
Acciones recomendadas
objeto más con el mismo nombre que la función a la que se
Complete la declaración del dato o de la rutina o cambie el
hace referencia. Asegúrese de que todos los nombres de objeto
nombre del dato o de la rutina a un marcador de sustitución.
cumplan las reglas de asignación de nombres en cuanto a que
sean exclusivos.
Continúa en la página siguiente
238
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40071, Error de referencia
Acciones recomendadas
El nombre especificado identifica a un objeto que no es una
Descripción
función. Compruebe si la función deseada está oculta por otro
Referencia de etiqueta arg ambigua.
objeto que tiene el mismo nombre.
Acciones recomendadas
Desde esta posición del programa está visible al menos un
40076, Error de referencia
objeto más con el mismo nombre que la etiqueta a la que se
hace referencia. Asegúrese de que todos los nombres de objeto
cumplan las reglas de asignación de nombres en cuanto a que
Descripción
arg no es una referencia a una etiqueta.
Acciones recomendadas
sean exclusivos.
El nombre especificado identifica a un objeto que no es una
40072, Error de referencia
etiqueta. Compruebe si la etiqueta deseada está oculta por otro
objeto que tiene el mismo nombre.
Descripción
Referencia a procedimiento arg ambigua.
40077, Error de referencia
Acciones recomendadas
Desde esta posición del programa está visible al menos un
objeto más con el mismo nombre que el procedimiento al que
se hace referencia. Asegúrese de que todos los nombres de
Descripción
arg no es una referencia a un parámetro opcional de un valor
de argumento condicional.
objeto cumplan las reglas de asignación de nombres en cuanto
Acciones recomendadas
a que sean exclusivos.
El nombre especificado identifica a un objeto que no es un
parámetro opcional. Cambie el nombre para hacer referencia
40073, Error de referencia
a un parámetro opcional.
Descripción
Referencia de rutina TRAP arg ambigua.
40078, Error de referencia
Descripción
Acciones recomendadas
Desde esta posición del programa está visible al menos un
arg no es una referencia a un parámetro opcional.
objeto más con el mismo nombre que la rutina TRAP a la que
Acciones recomendadas
se hace referencia. Asegúrese de que todos los nombres de
El nombre especificado identifica a un objeto que no es un
objeto cumplan las reglas de asignación de nombres en cuanto
parámetro opcional. Cambie el nombre para hacer referencia
a que sean exclusivos.
a un parámetro opcional.
40074, Error de referencia
40079, Error de referencia
Descripción
Descripción
arg no es una referencia a un dato completo.
Tarea arg: arg no es una referencia a un procedimiento.
Acciones recomendadas
Acciones recomendadas
El nombre especificado identifica a un objeto que no es un
El nombre especificado identifica a un objeto que no es un
dato. Compruebe si el dato deseado está oculto por otro objeto
procedimiento. Compruebe si el procedimiento deseado está
que tiene el mismo nombre.
oculto por otro objeto que tiene el mismo nombre.
40075, Error de referencia
40080, Error de referencia
Descripción
Descripción
arg no es una referencia a una función.
arg no es una referencia a un parámetro obligatorio.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
239
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40089, Error de referencia
Acciones recomendadas
El nombre especificado identifica a un objeto que no es un
parámetro obligatorio. Cambie el nombre para hacer referencia
a un parámetro obligatorio.
Descripción
Referencia al componente de registro desconocido arg.
Acciones recomendadas
El tipo de registro no contiene ningún componente de registro
40081, Error de referencia
con el nombre especificado.
Descripción
arg no es una referencia a una rutina TRAP.
Acciones recomendadas
El nombre especificado identifica a un objeto que no es una
rutina TRAP. Compruebe si la rutina TRAP deseada está oculta
por otro objeto que tiene el mismo nombre.
40090, Error de referencia
Descripción
Referencia al parámetro obligatorio desconocido arg.
Acciones recomendadas
La rutina a la que se ha llamado no contiene ningún parámetro
40082, Error de referencia
obligatorio (ni ningún otro objeto) con el nombre especificado.
Descripción
40092, Error de referencia
arg no es un nombre de tipo.
Descripción
Acciones recomendadas
El nombre especificado identifica a un objeto que no es un tipo.
Nombre de tipo desconocido arg.
Compruebe si el tipo deseado está oculto por otro objeto que
Acciones recomendadas
tiene el mismo nombre.
Desde esta posición del programa no está visible ningún tipo
de dato (ni ningún otro objeto) con el nombre especificado.
40083, Error de tipo
40093, Error de instrucción
Descripción
Descripción
arg no es un tipo de valor.
Destino de asignación de sólo lectura.
Acciones recomendadas
Solo los valores que no tienen ningún valor inicial y los
Acciones recomendadas
parámetros con modo 'VAR' pueden ser un semivalor o un
Los datos a los que se desee asignar valores no pueden ser
valor.
constantes, variables de sólo lectura ni variables persistentes
de sólo lectura.
40086, Error de referencia
40094, Error de declaración de dato
Descripción
Referencia a la etiqueta desconocida arg.
Descripción
Declaración de variable persistente no permitida en la rutina.
Acciones recomendadas
La rutina no contiene ninguna etiqueta (ni ningún otro objeto)
Acciones recomendadas
con el nombre especificado.
Las variables persistentes sólo pueden ser declaradas en los
módulos. Traslade la declaración de variable persistente para
40087, Error de referencia
eliminarla de la rutina.
Descripción
40095, Error de instrucción
Referencia al parámetro opcional desconocido arg.
Descripción
Acciones recomendadas
La rutina a la que se ha llamado no contiene ningún parámetro
opcional (ni ningún otro objeto) con el nombre especificado.
RAISE sin expresión sólo permitido en gestores de errores.
Acciones recomendadas
Añada una expresión de número de error a la instrucción
RAISE.
Continúa en la página siguiente
240
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40096, Error de instrucción
40102, Error de tipo
Descripción
Descripción
RETRY sólo permitido en gestores de errores.
Error de coincidencia de tipos del agregado. Tipo esperado
arg.
Acciones recomendadas
La instrucción RETRY sólo puede ser utilizada en gestores de
Acciones recomendadas
errores. Elimínela.
El agregado no es del tipo de dato esperado.
40097, Error de instrucción
40103, Error de tipo
Descripción
Descripción
TRYNEXT sólo permitido en gestores de errores.
Variable persistente arg, arg, error de coincidencia de tipos.
Acciones recomendadas
Acciones recomendadas
La instrucción TRYNEXT sólo puede ser utilizada en gestores
Ya existe un dato persistente con el mismo nombre pero con
de errores. Elimínela.
otro tipo de dato. Cambie el nombre de la variable persistente
o cambie su tipo de dato.
40098, Error de parámetro
40104, Error de declaración de dato
Descripción
El parámetro 'switch' debe tener el modo de transferencia IN.
Descripción
Imposible determinar las dimensiones de una matriz
Acciones recomendadas
Elimine la especificación de modo de transferencia del
(¿referencias circulares a la constante?).
parámetro. Si el modo de transferencia IN no es suficiente,
Acciones recomendadas
cambie el tipo de dato del parámetro.
Compruebe si ha definido correctamente todas las constantes
a las que hace referencia. Si es así, el programa es demasiado
40099, Error de parámetro
complejo. Pruebe a rescribir las declaraciones.
Descripción
El parámetro 'switch' no admite el dimensionamiento.
40105, Error de declaración de dato
Descripción
Acciones recomendadas
Elimine la especificación de dimensión de matriz o cambie el
Imposible determinar el tipo de un valor constante (¿referencias
circulares a la constante?).
tipo de dato del parámetro.
Acciones recomendadas
40100, Error de parámetro
Compruebe si ha definido correctamente todas las constantes
a las que hace referencia. Si es así, el programa es demasiado
Descripción
'switch' sólo permitido en parámetros opcionales.
Acciones recomendadas
complejo. Pruebe a rescribir las declaraciones.
40106, Error de declaración de dato
Cambie el parámetro para convertirlo en un parámetro opcional
o cambie el tipo de dato del parámetro. Si el objeto no es un
Descripción
Imposible evaluar una expresión de valor constante
parámetro, cambie el tipo de dato.
(¿referencias circulares a la constante?).
40101, Error de tipo
Acciones recomendadas
Compruebe si ha definido correctamente todas las constantes
Descripción
Error de coincidencia de tipos entre el tipo esperado arg y el
tipo encontrado arg.
a las que hace referencia. Si es así, el programa es demasiado
complejo. Pruebe a rescribir las declaraciones.
Acciones recomendadas
La expresión no es del tipo de dato esperado.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
241
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40107, Error de declaración de dato
programa. Cambie el nombre del registro o cambie el nombre
que ha causado el problema.
Descripción
Imposible determinar el tipo de un valor variable (¿referencias
circulares a la constante?).
40112, Error de referencia
Descripción
Acciones recomendadas
Compruebe si ha definido correctamente todas las constantes
Nombre de alias arg ambiguo.
a las que hace referencia. Si es así, el programa es demasiado
Acciones recomendadas
complejo. Pruebe a rescribir las declaraciones.
Desde esta posición del programa está visible al menos un
objeto más con el mismo nombre que el nombre de alias al que
40108, Error de tipo
se hace referencia. Asegúrese de que todos los nombres de
objeto cumplan las reglas de asignación de nombres en cuanto
Descripción
a que sean exclusivos.
Tipo de agregado desconocido.
Acciones recomendadas
40113, Error de nombre
No es posible usar un agregado en esta posición dado que no
hay ningún tipo de dato esperado. Declare el dato con el tipo
de dato deseado y el valor del agregado. Utilice el nombre del
Descripción
Nombre de alias global arg ambiguo.
Acciones recomendadas
dato en lugar del agregado.
Los tipos globales deben tener nombres exclusivos dentro de
40109, Error de definición de tipo
todos los tipos, datos, rutinas y módulos globales de todo el
programa. Cambie el nombre del alias o cambie el nombre que
Descripción
Imposible determinar el tipo del componente de registro arg
(¿definiciones de tipo circulares?).
ha causado el problema.
40114, Error de definición de tipo
Acciones recomendadas
Compruebe que el tipo de componente esté definido
correctamente. Si está bien definido, es posible que exista una
Descripción
La referencia de tipo del nombre de alias arg es un tipo de alias.
definición circular. El tipo del componente no debe hacer
Acciones recomendadas
referencia al propio tipo de registro.
Compruebe que el tipo de componente esté definido
correctamente. Si es así, podría existir una definición circular.
40110, Error de referencia
El tipo de un componente no puede hacer referencia al propio
tipo de registro.
Descripción
Nombre de registro arg ambiguo.
40115, Error de definición de tipo
Acciones recomendadas
Desde esta posición del programa está visible al menos un
objeto más con el mismo nombre que el nombre de registro al
que se hace referencia. Asegúrese de que todos los nombres
Descripción
Imposible determinar el tipo del alias arg (¿definiciones de tipo
circulares?).
de objeto cumplan las reglas de asignación de nombres en
Acciones recomendadas
cuanto a que sean exclusivos.
Compruebe que el tipo de alias esté definido correctamente.
Si está bien definido, es posible que exista una definición
40111, Error de nombre
circular. El tipo de un alias no debe hacer referencia a un
registro que utilice este alias como componente.
Descripción
Nombre de registro global arg ambiguo.
40116, Error de referencia
Acciones recomendadas
Los tipos globales deben tener nombres exclusivos dentro de
todos los tipos, datos, rutinas y módulos globales de todo el
Descripción
Nombre de componente de registro arg ambiguo.
Continúa en la página siguiente
242
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40123, Error de argumento
Acciones recomendadas
Desde esta posición del programa está visible al menos un
objeto más con el mismo nombre que el componente al que se
hace referencia. Asegúrese de que todos los nombres de objeto
cumplan las reglas de asignación de nombres en cuanto a que
Descripción
El argumento del parámetro 'PERS' arg no es una referencia a
una variable persistente o es de sólo lectura.
Acciones recomendadas
sean exclusivos.
Asegúrese de que el argumento sólo sea una variable
40117, Error de definición de tipo
persistente o una referencia a un parámetro persistente y de
que sea posible escribir en él. No utilice () alrededor del
Descripción
argumento.
No se permite usar un marcador de sustitución en lugar de un
componente de registro al definir un registro con nombre.
Acciones recomendadas
Complete la definición o cambie el nombre del dato a un
marcador de sustitución.
40124, Error de argumento
Descripción
El argumento del parámetro 'VAR' arg no es una referencia a
una variable o es de sólo lectura.
Acciones recomendadas
40119, Error de referencia
Asegúrese de que el argumento sólo sea una variable o una
Descripción
referencia a un parámetro variable y de que sea posible escribir
Imposible usar el tipo de semivalor arg en componentes de
en él. No utilice () alrededor del argumento.
registro.
40125, Error de instrucción
Acciones recomendadas
Descripción
40120, Error de referencia
El número de interrupción no es una referencia a una variable
Descripción
estática, o bien está compartida o es de sólo lectura.
Referencia no válida al objeto de tarea instalado arg desde un
objeto compartido.
Acciones recomendadas
Asegúrese de que el número de interrupción sólo sea una
Acciones recomendadas
variable o una referencia a un parámetro variable. La variable
Instale el objeto compartido al que se hace referencia o instale
debe ser estática y no debe estar compartida. La variable no
en cada tarea el objeto/archivo ReaL o el módulo de RAPID
puede ser de sólo lectura.
desde el que se hace la referencia (no compartido).
40126, Error de valor
40121, Error de referencia
Descripción
Descripción
Valor entero arg demasiado alto.
Imposible usar un tipo de semivalor en una matriz.
Acciones recomendadas
Acciones recomendadas
El valor de la expresión debe ser un valor entero. El valor actual
está fuera del rango de los números enteros.
40122, Error de referencia
40127, Error de valor
Descripción
arg no es una referencia a un procedimiento.
Descripción
arg no es un valor entero.
Acciones recomendadas
El nombre especificado identifica a un objeto que no es un
Acciones recomendadas
procedimiento. Compruebe si el procedimiento deseado está
El valor de la expresión debe ser un valor entero exacto. El
oculto por otro objeto que tiene el mismo nombre.
valor actual contiene decimales.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
243
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40128, Error de referencia
Acciones recomendadas
Descripción
Referencia al dato completo desconocido arg.
40138, Error de sintaxis
Descripción
Acciones recomendadas
Desde esta posición del programa no está visible ningún dato
Error de sintaxis, se realiza una retrocesión en la pila
(ni ningún otro objeto) con el nombre especificado.
Acciones recomendadas
40129, Error de referencia
40139, Error de sintaxis
Descripción
Descripción
Referencia a la función desconocida arg.
Error de sintaxis, interpretación finalizada
Acciones recomendadas
Acciones recomendadas
Desde esta posición del programa no está visible ninguna
función (ni ningún otro objeto) con el nombre especificado.
40130, Error de referencia
40140, El valor numérico del símbolo arg está
fuera de rango.
Descripción
El valor numérico del símbolo arg está fuera de rango.
Descripción
Referencia al procedimiento desconocido arg.
Acciones recomendadas
Reduzca el valor.
Acciones recomendadas
Desde esta posición del programa no está visible ningún
procedimiento (ni ningún otro objeto) con el nombre
especificado.
40141, Cadena demasiado larga
Descripción
La cadena arg es demasiado larga.
40131, Error de referencia
Acciones recomendadas
Descripción
Acorte la cadena.
Referencia a rutina TRAP desconocida arg.
40142, TxId fuera de rango
Acciones recomendadas
Desde esta posición del programa no está visible ninguna rutina
TRAP (ni ningún otro objeto) con el nombre especificado.
Descripción
El identificador de texto arg está fuera de rango.
40135, Error de sintaxis
Acciones recomendadas
Descripción
40143, Agregado fuera de rango
Se esperaba arg.
Descripción
Acciones recomendadas
El agregado arg está fuera de rango.
Acciones recomendadas
40136, Error de sintaxis
Reduzca el agregado.
Descripción
No se esperaba arg.
40144, Entero fuera de rango.
Acciones recomendadas
Descripción
El entero arg está fuera de rango.
40137, Error de sintaxis
Acciones recomendadas
Descripción
Reduzca el entero.
Se esperaba arg, pero se encontró arg.
Continúa en la página siguiente
244
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40145, Pila de intérprete llena
40152, Error de declaración de dato
Descripción
Descripción
La pila del intérprete está llena.
TASK no válido en una declaración de variable de rutina.
Acciones recomendadas
Acciones recomendadas
Reduzca la complejidad del programa.
Sólo las declaraciones de datos de programa pueden tener el
atributo TASK. Elimine el atributo TASK o traslade la
40146, No queda espacio suficiente en el área
de uso general.
declaración a una posición que quede fuera de la rutina.
40155, Error de argumento
Descripción
No hay suficiente espacio en el área de uso general para
Descripción
realizar la acción.
Tarea arg: El argumento del parámetro 'PERS'arg no es una
referencia a una variable persistente o es de sólo lectura.
Acciones recomendadas
Escriba el programa de otra forma.
Acciones recomendadas
Asegúrese de que el argumento sólo sea una variable
40147, El identificador es una palabra reservada
del lenguaje actual
persistente o una referencia a un parámetro persistente y de
que sea posible escribir en él. No utilice () alrededor del
argumento.
Descripción
El identificador arg es una palabra reservada del lenguaje
actual.
40156, Error de argumento
Descripción
Acciones recomendadas
Tarea arg: El argumento del parámetro 'VAR' arg no es una
Cambie el nombre del identificador.
referencia a una variable o es de sólo lectura
40148, Identificador demasiado largo
Acciones recomendadas
Asegúrese de que el argumento sólo sea una variable o una
Descripción
El nombre del identificador arg es demasiado largo.
referencia a un parámetro variable y de que sea posible escribir
en él. No utilice () alrededor del argumento.
Acciones recomendadas
Asigne un nombre más corto al identificador.
40157, Error de instrucción
40149, Marcador de sustitución demasiado largo
Descripción
Tarea arg: El número de interrupción no es una referencia a
Descripción
una variable estática, o bien está compartida o es de sólo
El marcador de sustitución arg es demasiado largo.
lectura.
Acciones recomendadas
Acciones recomendadas
Asigne un nombre más corto al marcador de sustitución.
Asegúrese de que el número de interrupción sólo sea una
variable o una referencia a un parámetro variable. La variable
40150, Testigo desconocido inesperado
debe ser estática y no debe estar compartida. La variable no
puede ser de sólo lectura.
Descripción
Se ha encontrado un testigo desconocido inesperado.
40158, Error de valor
Acciones recomendadas
Descripción
Elimine el testigo desconocido.
Tarea arg: Valor entero arg demasiado alto.
Acciones recomendadas
El valor de la expresión debe ser un valor entero. El valor actual
está fuera del rango de los números enteros.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
245
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40159, Error de valor
Acciones recomendadas
Divida el módulo en dos o más módulos más pequeños.
Descripción
Tarea arg: arg no es un valor entero.
40165, Error de referencia
Acciones recomendadas
El valor de la expresión debe ser un valor entero exacto. El
Descripción
Tarea arg: Referencia al dato completo desconocido arg.
valor actual contiene decimales.
Acciones recomendadas
40160, Errores en el programa de RAPID.
Desde esta posición del programa no está visible ningún dato
(ni ningún otro objeto) con el nombre especificado.
Descripción
Tarea arg: El programa de RAPID contiene errores.
40166, Error de referencia
Acciones recomendadas
Busque los errores de RAPID con Comprobar programa en el
Editor de programas y corrija el programa.
Descripción
Tarea arg: Referencia a la función desconocida arg.
Acciones recomendadas
40161, Falta la opción.
Desde esta posición del programa no está visible ninguna
función (ni ningún otro objeto) con el nombre especificado.
Descripción
La instrucción arg requiere la opción arg.
40168, Error de referencia
Consecuencias
El programa no se ejecutará correctamente.
Descripción
Tarea arg: Referencia al procedimiento desconocido arg.
Causas probables
La imagen del sistema no incluye la opción necesaria.
Acciones recomendadas
No hay ningún procedimiento (ni ningún otro objeto) visible
Acciones recomendadas
con el nombre especificado desde esta posición del programa.
Actualice la imagen del sistema con la opción necesaria.
40162, Errores en el programa de RAPID.
Para evitar errores de tiempo de ejecución como éstos, añada
el código necesario para gestionar este caso en el gestor de
errores.
El valor de ERRNO cambiará a "ERR_REFUNKPRC".
Descripción
Tarea arg: El programa de RAPID contiene errores.
40170, Error de referencia
Acciones recomendadas
Realice las acciones siguientes para poder depurar el programa:
Descripción
Cambie el tipo de la tarea a NORMAL. Reinicie el controlador.
Tarea arg: Referencia a rutina TRAP desconocida arg.
Busque errores de RAPID y corrija el programa.
Acciones recomendadas
Desde esta posición del programa no está visible ninguna rutina
40163, Error de módulo
TRAP (ni ningún otro objeto) con el nombre especificado.
Descripción
El módulo arg contiene demasiadas líneas para poder cargarlo.
El número máximo de líneas permitidas en un módulo es de
arg.
40171, Error de referencia
Descripción
Tarea arg:
Consecuencias
Se ha encontrado una referencia a un dato (u otro tipo de
No es posible cargar el módulo (o el programa si el módulo
objeto) no válido durante la ejecución del módulo arg.
formaba parte de un programa).
Acciones recomendadas
Causas probables
Compruebe si existen referencias sin resolver en el programa.
El módulo contiene demasiadas líneas.
Continúa en la página siguiente
246
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40172, Error de referencia
40191, Error de instrucción
Descripción
Descripción
Tarea arg:
Tarea arg: Variable y rutina TRAP ya conectadas.
Referencia al módulo desconocido arg.
Acciones recomendadas
Acciones recomendadas
No es válido conectar más de una vez una variable concreta
Desde esta posición del programa no está visible ningún
con una rutina TRAP.
módulo (ni ningún otro objeto) con el nombre especificado.
Compruebe si el programa contiene una referencia a un módulo
incorrecto o si falta el módulo.
40192, Error de argumento
Descripción
Tarea arg: arg es el segundo argumento condicional encontrado
40173, Error de referencia
en un conjunto de parámetros excluyentes entre sí.
Descripción
Acciones recomendadas
Tarea arg:
No es posible especificar argumentos para más de uno de los
Se ha hecho referencia al objeto arg, que no es un módulo.
parámetros de una lista de parámetros excluyentes entre sí.
Acciones recomendadas
El nombre especificado identifica a un objeto que no es un
módulo.
Compruebe el programa para detectar referencias a módulos
incorrectos.
40193, Error de ejecución
Descripción
Tarea arg: Error en llamada a procedimiento con enlazamiento
en tiempo de ejecución arg.
Acciones recomendadas
40174, Error de referencia
Se ha producido un error en la instrucción de llamada a
Descripción
procedimiento. Consulte el mensaje anterior para determinar
Tarea arg:
la causa real.
La referencia al módulo arg es ambigua.
40194, Error de valor
Acciones recomendadas
Desde esta posición del programa está visible al menos un
objeto más con el mismo nombre que el módulo al que se hace
referencia. Asegúrese de que todos los nombres de objeto
Descripción
Tarea arg: División entre cero.
cumplan las reglas de asignación de nombres en cuanto a que
Acciones recomendadas
sean exclusivos.
No se permite la división entre 0. Rescriba el programa de forma
que la operación de división no se ejecute si el divisor es 0.
40175, Error de referencia
40195, Error de límite
Descripción
Tarea arg:
Descripción
La referencia al procedimiento arg es ambigua.
Tarea arg: Se ha superado el número máximo configurado de
instrucciones RETRY (arg reintentos).
Acciones recomendadas
Desde esta posición del programa está visible al menos un
Acciones recomendadas
objeto más con el mismo nombre que el procedimiento al que
Es probable que la corrección del error realizada antes de
se hace referencia. Asegúrese de que todos los nombres de
ejecutar la instrucción RETRY no sea suficiente para solucionar
objeto cumplan las reglas de asignación de nombres en cuanto
el error. Compruebe el gestor de errores.
a que sean exclusivos.
40196, Error de instrucción
Descripción
Tarea arg: Se ha intentado ejecutar el marcador de sustitución.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
247
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
Acciones recomendadas
Elimine el marcador de sustitución o la instrucción que lo
La matriz no tiene el tamaño esperado. La asignación de
contiene, o bien complete la instrucción. A continuación,
matrices sólo se permite con matrices con tamaños idénticos.
reanude la ejecución.
40203, Error de referencia
40197, Error de ejecución
Descripción
Descripción
Tarea arg: Parámetro opcional arg no definido.
Tarea arg: Una función no devuelve ningún valor.
Ref. de programa: arg.
Acciones recomendadas
No es posible hacer referencia a un parámetro opcional no
Acciones recomendadas
definido. Utilice la función predefinida 'Present' para comprobar
Se ha alcanzado el final de la función sin que se ejecutara
la presencia del parámetro antes de usar su valor.
ninguna instrucción RETURN. Añada una instrucción RETURN
que especifique un valor de retorno de la función.
40204, Error de valor
Descripción
40198, Error de valor
Tarea arg: El índice de matriz arg del número de dimensión arg
Descripción
está fuera de límites (1- arg ).
Tarea arg: Valor de orientación no válido arg.
Acciones recomendadas
Acciones recomendadas
El valor del índice de matriz no es positivo o no respeta el
Se ha intentado usar un valor no válido de orientación
tamaño declarado de la matriz.
(cuaternio).
40205, Error de valor
40199, Error de valor
Descripción
Descripción
Tarea arg: Cadena de RAPID arg demasiado larga.
Tarea arg: Número de error no válido arg en arg.
Acciones recomendadas
Acciones recomendadas
El valor de cadena supera la longitud máxima permitida.
Utilice números de errores que estén dentro del rango de 1 a
Rescriba el programa para usar cadenas más cortas.
90 o registre más números de error con la instrucción
40206, Cola de interrupciones llena
BookErrNo.
Descripción
40200, Error de límite
La ejecución de todas las tareas normales se ha detenido. Se
Descripción
han producido demasiadas interrupciones en arg durante la
Tarea arg: No hay más números de interrupción disponibles.
ejecución de una rutina TRAP.
Acciones recomendadas
Consecuencias
El número de interrupciones disponibles está limitado. Rescriba
El sistema pasa al estado bloqueado y no puede ser reiniciado
el programa para usar un número menor de interrupciones.
antes de trasladar el puntero de programa a una posición
Este mensaje también puede aparecer como consecuencia de
arbitraria.
un error de sistema.
Causas probables
Se han producido demasiadas interrupciones durante la
40202, Error de tipo
ejecución de una rutina TRAP. Puede deberse a una carga
Descripción
elevada en la CPU.
Tarea arg: Las dimensiones arg y arg del número de dimensión
Acciones recomendadas
arg de la matriz conformada son incompatibles.
Reduzca al mínimo el tiempo de ejecución de la rutina TRAP.
Desactive/active las interrupciones durante la ejecución de una
rutina TRAP mediante los comandos Isleep o Iwatch.
Continúa en la página siguiente
248
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40207, Error de valor
40222, Error de límite
Descripción
Descripción
Tarea arg: Número de error no válido arg en arg.
Tarea arg: Desbordamiento de la pila de ejecución.
Acciones recomendadas
Acciones recomendadas
Los números de error utilizados en los gestores de errores
El programa es demasiado complejo como para ejecutarlo. Es
deben ser positivos.
probable que el programa contenga rutinas recursivas.
40208, Cola de eventos de error llena
40223, Error de ejecución
Descripción
Descripción
Tarea arg: El programa ya estaba ejecutando un evento de
La ejecución de la tarea arg ha sido detenida por un error de
error cuando se produjo un nuevo evento.
tiempo de ejecución.
Acciones recomendadas
Consecuencias
Corrija las causas del evento de error y reinicie el programa.
La ejecución del programa se detendrá inmediatamente.
Causas probables
40209, Gestor de errores activo
El error del programa es considerado como NO
Descripción
RECUPERABLE, de forma que no se ha permitido ningún
Se ha producido un evento de error en la tarea arg durante la
intento de recuperación desde una rutina de gestor de errores
ejecución del gestor de errores. Sin embargo, el contexto de
(si se ha usado). La causa real del error puede variar y es
la instrucción de RAPID que ha generado este evento ya se ha
probable que se especifique en un mensaje de registro de
agotado. Por tanto, no es posible ejecutar ninguna gestión del
eventos registrado al mismo tiempo que este mensaje.
error.
Acciones recomendadas
Acciones recomendadas
Compruebe otros mensajes del registro de errores que se hayan
Corrija las causas del evento de error y reinicie el programa.
registrado al mismo tiempo para determinar la causa real.
40210, Interrupción eliminada de la cola
40224, Error de ejecución
Descripción
Descripción
Se han eliminado todas las interrupciones de la cola de
Tarea arg: Código de retorno no válido arg recibido de la rutina
interrupciones de la tarea arg.
ReaL. Esto siempre se debe a un error interno de la rutina ReaL.
Consecuencias
Acciones recomendadas
No es posible ejecutar ninguna rutina TRAP que esté conectada
a la interrupción.
40225, Error de ejecución
Causas probables
Descripción
El programa ha sido detenido. Es posible que se esté
Tarea arg: No fue posible reiniciar la ejecución. La ejecución
ejecutando una rutina de servicio o una rutina de evento. El
del programa no pudo continuar después de una caída de
programa se está ejecutando en el modo paso a paso.
alimentación.
Acciones recomendadas
Acciones recomendadas
Reinicie el programa.
40221, Error de ejecución
40226, Error de nombre
Descripción
Tarea arg: Ejecución anulada.
Descripción
Tarea arg: El nombre de procedimiento arg no es un
Acciones recomendadas
La ejecución fue anulada debido a un error no recuperable.
identificador de RAPID que excluya las palabras reservadas.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
249
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
Acciones recomendadas
El nombre del procedimiento debe ser un identificador válido
Se ha producido un error recuperable en tiempo de ejecución,
de RAPID que sea distinto de todas las palabras reservadas
pero no ha sido gestionado por ninguna cláusula ERROR.
del lenguaje RAPID. Cambie la expresión de nombre.
40241, Error de valor
40227, Error de límite
Descripción
Descripción
Tarea arg: El número de dimensión de matriz arg está fuera de
Tarea arg: Desbordamiento de la pila en tiempo de ejecución.
rango (1- arg ).
El programa es demasiado complejo como para ejecutarlo. Es
probable que el programa contenga rutinas recursivas.
Acciones recomendadas
El valor del parámetro 'DimNo' de la función 'Dim' debe ser un
Acciones recomendadas
valor entero que se encuentre dentro del rango especificado.
40228, Error de ejecución
40242, Error de tipo
Descripción
Descripción
La ejecución de la tarea arg ha sido detenida por un error de
Tarea arg: El dato no es una matriz.
tiempo de ejecución arg.
Acciones recomendadas
Consecuencias
El parámetro 'DatObj' de la función 'Dim' debe ser una matriz.
La ejecución del programa se detendrá inmediatamente.
Causas probables
40243, Error de valor
El error del programa se considera como RECUPERABLE pero
Descripción
el error no ha sido recuperado. La causa real del error puede
Tarea arg: Número de interrupción desconocido.
variar y es probable que se especifique en un mensaje de
registro de eventos registrado al mismo tiempo que este
mensaje.
Acciones recomendadas
Compruebe que la variable de interrupción especificada haya
sido inicializada mediante CONNECT y que la interrupción haya
Acciones recomendadas
sido definida con la instrucción ISignalDI u otra instrucción de
Compruebe otros mensajes del registro de errores que se hayan
definición de interrupciones.
registrado al mismo tiempo para determinar la causa real.
40244, Error de valor
40229, Error de ejecución
Descripción
Descripción
Tarea arg:
Tarea arg: Error no gestionado.
El objeto arg es de un tipo sin valor.
Acciones recomendadas
Acciones recomendadas
Se ha producido un error en la instrucción a la que se ha
Utilice una expresión o un objeto de dato que sea de valor o
llamado, pero no ha sido gestionado por ninguna cláusula
semivalor.
ERROR del programa.
Compruebe el error o el aviso anterior en el registro común
40245, Error de parámetro
para determinar las causas.
Descripción
Los parámetros de arg y arg no coinciden (enlazamiento en
40230, Error de ejecución
tiempo de ejecución).
Descripción
Tarea arg: Error recuperable en tiempo de ejecución no
gestionado.
Acciones recomendadas
Asegúrese de que todos los procedimientos a los que se llame
desde el mismo nodo de enlazamiento en tiempo de ejecución
tengan parámetros coincidentes. Es decir, deben coincidir en
Continúa en la página siguiente
250
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
su tipo básico, su modo y sus parámetros obligatorios y
opcionales.
40254, Error de definición de símbolo
Descripción
40246, Imposible desactivar la interrupción
segura
Tarea arg: El parámetro 'ANYTYPE#' arg no puede ser
dimensionado.
Acciones recomendadas
Descripción
Elimine la especificación de dimensión. 'ANYTYPE#' incluye a
Tarea: arg.
los tipos de matriz.
No es posible desactivar una interrupción segura con la
instrucción ISleep.
40255, Error de definición de símbolo
Ref. de programa: arg.
Descripción
Acciones recomendadas
Tarea arg: 'ANYTYPE#' sólo se permite en el parámetro (no en
Recuperación: arg.
arg ).
40247, Error de tamaño de variable persistente
Acciones recomendadas
Utilice otro tipo.
Descripción
Tarea arg: la variable persistente arg: ha cambiado de tamaño
40256, Error de parámetro
y se debe inicializar.
Descripción
Acciones recomendadas
Cargar los módulos de todas las tareas que hagan uso de la
variable persistente.
Tarea arg: No debe especificar 'alt' para el primer parámetro
opcional arg de la lista de alternativas.
Acciones recomendadas
Asegúrese de que sólo los parámetros segundo y siguientes
40251, Error de nombre
de cada lista de parámetros opcionales excluyentes estén
Descripción
marcados como alternativos.
Tarea arg: Nombre de símbolo ambiguo arg.
40257, Error de parámetro
Acciones recomendadas
Los objetos instalados deben tener nombres exclusivos. Cambie
el nombre del objeto o cambie el nombre que ha causado el
problema.
Descripción
Tarea arg: El parámetro de modo REF arg no puede ser
dimensionado.
Acciones recomendadas
40252, Error de límite
Elimine la especificación de dimensión de matriz o cambie el
Descripción
modo del parámetro.
Tarea arg: Error arg al crear una entrada de sdb para arg.
40258, Error de parámetro
Acciones recomendadas
Se ha producido un error al intentar insertar la variable
persistente en la base de datos compartida. Es posible que la
base de datos esté llena.
Descripción
Tarea arg: El parámetro 'switch' arg no puede ser dimensionado.
Acciones recomendadas
40253, Error de definición de tipo
Elimine la especificación de dimensión de matriz o cambie el
tipo de dato del parámetro.
Descripción
Tarea arg: No se permite usar el alias arg del alias arg.
Acciones recomendadas
No es posible definir un tipo de alias igual a otro tipo de alias.
En su lugar, defina los dos tipos de alias partiendo del mismo
elemento atómico o tipo de registro.
40259, Error de parámetro
Descripción
Tarea arg: El parámetro 'switch' arg debe tener el modo de
transferencia IN (valor especificado arg).
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
251
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
Acciones recomendadas
Elimine la especificación de modo de transferencia del
Es necesario especificar una función de C que ejecute la
parámetro. Si el modo de transferencia IN no es suficiente,
función ReaL que está definiendo.
cambie el tipo de dato del parámetro.
40265, Error de definición de símbolo
40260, Error de definición de símbolo
Descripción
Descripción
Tarea arg: Falta una función inicialización de valor para arg.
Tarea arg: 'switch' sólo se permite para un parámetro opcional
(no para arg ).
Acciones recomendadas
Es necesario especificar una función de inicialización de valor.
Acciones recomendadas
Cambie el parámetro para convertirlo en un parámetro opcional
o cambie el tipo de dato del parámetro. Si el objeto no es un
parámetro, cambie el tipo de dato.
40266, Error de referencia
Descripción
Tarea arg: arg no es un nombre de tipo de dato (objeto arg ).
40261, Error de definición de tipo
El nombre especificado identifica a un objeto que no es un tipo.
Acciones recomendadas
Descripción
Tarea arg: La clase de tipo de valor de arg debe ser
40267, Error de referencia
REAL_SYMVALTYP_VAL, _SEMIVAL, _NONVAL o _NONE
Descripción
(valor especificado arg ).
Tarea arg: arg no es un tipo de dato de valor (objeto arg ). Sólo
Acciones recomendadas
los componentes de registro, los tipos de alias, las variables y
Cambie la clase de tipo de valor.
los parámetros de modo 'VAR' pueden ser de valor o de
40262, Error de declaración de dato
semivalor.
Acciones recomendadas
Descripción
Tarea arg: Demasiadas dimensiones de matriz para arg (valor
40268, Error de definición de símbolo
especificado arg ).
Descripción
Acciones recomendadas
Las matrices pueden tener un máximo de 3 dimensiones.
Tarea arg: Falta una función de conversión de valor para arg.
Acciones recomendadas
Es necesario especificar una función de conversión de valor
40263, Error de nombre
para un tipo de semivalor.
Descripción
Tarea arg: El nombre de símbolo arg no es un identificador de
40269, Error de definición de símbolo
RAPID que excluya las palabras reservadas.
Descripción
Acciones recomendadas
Los nombres de los objetos instalados, incluidos los parámetros
y componentes, deben ser identificadores legales de RAPID
Tarea arg: No hay memoria suficiente para el valor del dato
arg.
distintos de las palabras reservadas del lenguaje RAPID.
Acciones recomendadas
Cambie el nombre.
Necesita más memoria.
40264, Error de definición de símbolo
40270, Error de definición de tipo
Descripción
Descripción
Tarea arg: Falta una función de C para arg.
Tarea arg: El tipo privado arg sólo puede ser de valor o de
semivalor (valor especificado arg ).
Continúa en la página siguiente
252
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40277, Operación Deshacer anulada
Acciones recomendadas
Cambie la clase de tipo de valor.
Descripción
40271, Error de definición de tipo
Tarea arg.
La ejecución del programa fue detenida durante el
Descripción
procesamiento de sentencias UNDO. La operación UNDO no
Tarea arg: El tamaño del tipo privado arg debe ser un múltiplo
se ejecutó completamente.
de 4 (valor especificado arg ).
la rutina arg se estaba ejecutando cuando se detuvo la
operación UNDO.
Acciones recomendadas
Todos los tipos de RAPID deben tener un tamaño múltiplo de
Acciones recomendadas
cuatro. Cambie el tamaño de tipo especificado.
Si el procesamiento de UNDO requiere demasiado tiempo,
pruebe a eliminar de la cláusula UNDO las instrucciones que
40272, Error de tipo
requieren mucho tiempo, como TPWrite. Si el procesamiento
de la operación deshacer no parece terminar nunca, asegúrese
Descripción
Tarea arg: Error de coincidencia de tipo de variable persistente
para arg.
Acciones recomendadas
de que los bucles existentes en las sentencias UNDO sean
correctos.
40278, Operación Deshacer anulada
Ya existe un dato persistente con el mismo nombre pero con
otro tipo de dato. Cambie el nombre de la variable persistente
Descripción
Tarea arg: El procesamiento de UNDO fue anulado a causa de
o cambie su tipo de dato.
una sentencia EXIT en la rutina arg. UNDO no se ejecutó
completamente.
40273, Error de referencia
Acciones recomendadas
Descripción
Tarea arg: Nombre de tipo de dato desconocido arg para arg.
40279, Operación Deshacer anulada
Acciones recomendadas
No hay ningún tipo de dato (ni ningún otro objeto) con el nombre
Descripción
Tarea arg: El procesamiento de UNDO fue anulado a causa de
especificado.
un error en tiempo de ejecución en la rutina arg. UNDO no se
ejecutó completamente.
40274, Error de parámetro
Acciones recomendadas
Descripción
Tarea arg: Modo de transferencia de parámetro desconocido
arg para arg.
Investigue las causas del error.
40280, Operación Deshacer anulada
Acciones recomendadas
El modo de transferencia de parámetro especificado no es IN,
'VAR', 'PERS', 'INOUT' ni REF. Utilice el REAL_SYMPARMOD_x
Descripción
Tarea arg:
Las instrucciones BREAK, RAISE, RETURN y STOP no pueden
correspondiente.
utilizarse en ninguna cláusula UNDO ni en ninguna rutina a la
40275, Error de definición de símbolo
que se llame desde una cláusula UNDO. La instrucción arg se
encontraba en el contexto de UNDO al ejecutar la rutina arg.
Descripción
Tarea arg: Tipo de definición de símbolo desconocido arg. La
etiqueta de tipo de definición de símbolo no especifica ninguno
de los tipos de símbolo permitidos (REAL_SYMDEF_x).
Acciones recomendadas
Evite ejecutar la instrucción desde dentro de un contexto UNDO.
40281, Operación Deshacer anulada
Acciones recomendadas
Descripción
Tarea arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
253
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Le ejecución en el programa de las sentencias UNDO fue
anulada debido a una operación de edición.
40301, Error de acceso a archivo
Descripción
40304, Error de acceso a archivo
Descripción
La tarea arg está intentando utilizar el archivo arg pero no lo
consigue.
Consecuencias
La tarea arg está intentando utilizar el archivo arg pero no lo
No estará disponible ningún dato del archivo.
consigue.
Causas probables
Consecuencias
Es posible que el archivo esté protegido contra escritura. Es
No estará disponible ningún dato del archivo.
posible que el archivo o el directorio tengan un nombre
Causas probables
incorrecto. No queda espacio de almacenamiento libre en el
Es posible que el archivo esté protegido contra escritura.
dispositivo.
Acciones recomendadas
Acciones recomendadas
Compruebe si el archivo está protegido contra escritura y, en
Compruebe si el archivo está protegido contra escritura y, en
ese caso, desactive la protección.
ese caso, desactive la protección. Asegúrese de que el nombre
del archivo y el del directorio sean correctos. Asegúrese de
40302, Error de acceso a archivo
Descripción
La tarea arg está intentando utilizar el archivo arg pero no
encuentra el archivo o el directorio.
que haya suficiente espacio de almacenamiento libre.
40322, Error de carga
Descripción
Tarea arg: Errores de sintaxis de RAPID en el archivo arg.
Consecuencias
Si el archivo no encontrado es un módulo, no será posible la
Acciones recomendadas
carga automática en una tarea.
El archivo de origen a cargar contiene errores de sintaxis de
RAPID. Corrija el archivo de origen. Los errores de sintaxis se
Causas probables
Es posible que el archivo no haya sido copiado correctamente
registran en un archivo separado.
al directorio de destino. Es posible que el archivo o el directorio
tengan un nombre incorrecto.
40323, Error de carga
Acciones recomendadas
Descripción
Asegúrese de que el nombre del archivo y el del directorio sean
Tarea arg: Errores de sintaxis en el encabezado del archivo
correctos.
arg.
Acciones recomendadas
40303, Error de acceso a archivo
El archivo de origen a cargar contiene un error de sintaxis en
su encabezado. Corrija el archivo de origen. Los errores de
Descripción
La tarea arg está intentando utilizar el archivo arg pero no lo
sintaxis se registran en un archivo separado.
consigue.
40324, Error de carga
Consecuencias
No estará disponible ningún dato del archivo.
Descripción
Tarea arg: Palabras clave no definidas en el idioma especificado
Causas probables
No queda espacio de almacenamiento libre en el dispositivo.
(archivo arg ).
Acciones recomendadas
Acciones recomendadas
Asegúrese de que haya suficiente espacio de almacenamiento
Imposible cargar el código fuente de RAPID en el idioma
especificado en el encabezado del archivo.
libre.
Continúa en la página siguiente
254
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40325, Error de carga
Causas probables
Puede haber varios motivos diferentes. El módulo de RAPID
Descripción
puede tener errores de RAPID. Es posible que el archivo no
Tarea arg:
No está disponible un bloque libre de memoria de programas
exista.
lo suficientemente grande. La operación solicitada no pudo ser
Acciones recomendadas
completada.
Consulte los mensajes de evento en el registro de errores,
dominio RAPID. Corrija los errores de RAPID y restablezca
Causas probables
La memoria de programas está llena o fragmentada.
RAPID. O bien, asegúrese de que se pueda cargar el archivo
correcto. Restablezca RAPID.
Acciones recomendadas
Compruebe si sería posible dividir las estructuras de datos
40330, Errores de RAPID en el módulo instalado
grandes en bloques más pequeños.
El uso de módulos instalados puede ahorrar memoria de
Descripción
Tarea: arg. Módulo (línea/columna): arg. Existe un error con el
programas.
símbolo: arg.
40326, Error de carga
Consecuencias
El módulo no se instalará.
Descripción
Tarea arg: Pila de intérprete llena (archivo arg ).
40331, Error de tipo
Acciones recomendadas
El programa es demasiado complejo como para cargarlo.
Descripción
Tipos de operandos arg y arg no iguales para el operador '/',
'DIV' or 'MOD'.
40327, Error de carga
Acciones recomendadas
Descripción
Tarea arg: No es de una versión actual de RAPID (archivo arg
).
Acciones recomendadas
Los dos operandos de los operadores '/', 'DIV' o 'MOD' deben
ser del mismo tipo. Compruebe los tipos de los operandos.
40332, Error de tipo
Imposible cargar el código fuente de RAPID de la versión
especificada en el encabezado del archivo.
Descripción
Tipos de operandos arg y arg no iguales para el operador '<',
'<=', '>' or '>='.
40328, Error de carga
Acciones recomendadas
Descripción
Los dos operandos de los operadores '<', '<=', '>' o '>=' deben
Tarea: arg.
ser del mismo tipo. Compruebe los tipos de los operandos.
Memoria de programas llena.
arg.
40351, Error de asignación de memoria
Acciones recomendadas
Imposible cargar el módulo arg porque la memoria de
Descripción
Tarea arg: Imposible asignar memoria para una tabla hash. Se
programas está llena.
usará una lista lineal.
Recuperación: arg.
Acciones recomendadas
40329, Fallo de instalación del módulo
40352, Error de asignación de memoria
Descripción
Tarea: arg No es posible instalar un módulo del archivo arg.
Descripción
Tarea arg: Imposible actualizar la expresión persistente. Se
Consecuencias
conserva la anterior.
El módulo no se instalará.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
255
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40357, Falta el gestor de errores
Acciones recomendadas
40353, ¡Falta la unidad mecánica arg!
Descripción
Descripción
No hay ningún gestor de errores que gestione el error de
proceso para la tarea arg.
El componente de unidad mecánica del objeto de trabajo arg
se encuentra en mal estado.
Consecuencias
El programa no podrá ejecutarse más allá de la siguiente
Causas probables
instrucción de movimiento.
No hay ninguna unidad mecánica definida. No es posible
encontrar la unidad mecánica definida. El robot no puede mover
Causas probables
Falta el gestor de errores.
por sí mismo el objeto de trabajo.
Acciones recomendadas
Acciones recomendadas
Añada un gestor de errores. El gestor de errores debe incluir
Compruebe el componente de unidad mecánica del objeto de
una instrucción StartMove (StartMoveRetry).
trabajo.
40354, Se ha guardado una copia de un módulo
cargado dinámicamente.
40358, Mensaje de RMQ desechado
Descripción
Un mensaje de RMQ fue desechado en la tarea arg. arg recibió
Descripción
un mensaje de RMQ que no pudo ser gestionado.
Tarea: arg.
Se ha modificado un módulo cargado dinámicamente arg. El
módulo se pierde si se cambia el PP a Main. Se ha guardado
una copia del módulo modificado en arg.
Consecuencias
El mensaje de RMQ fue desechado sin ninguna notificación al
remitente.
Causas probables
Causas probables
Un módulo dinámico cargado ha cambiado. PP cambiado a
Main. El módulo cargado dinámicamente se elimina. Se ha
guardado una copia del módulo cambiado.
Puede deberse a varios motivos diferentes. No hay ninguna
interrupción conectada al tipo del mensaje recibido. No fue
posible crear ninguna interrupción porque la cola de
interrupciones estaba llena. El mensaje recibido estaba dañado.
Acciones recomendadas
Si prevé guardar los cambios, sustituya el archivo original con
Acciones recomendadas
Asegúrese de que la tarea haya conectado una interrupción a
la copia.
todos los tipos de mensajes que debe ser posible recibir. Lea
40355, La rutina de evento Stop/QStop ha sido
detenida.
acerca de IRMQMessage en el Manual de referencia de RAPID.
40359, Una rutina de evento se ha detenido.
Descripción
Descripción
Tarea: arg.
Una rutina de evento arg ha sido detenida por un comando de
paro externo. Todas las rutinas de evento Stop/QStop que estén
en marcha se detendrán tras arg ms si el controlador recibe un
Tarea: arg.
Una rutina de eventoarg ha sido detenida por un comando de
paro externo.
Acciones recomendadas
segundo comando de paro.
Mantenga lo más cortas posible todas las rutinas de evento y
Acciones recomendadas
Mantenga lo más cortas posible todas las rutinas de evento y
evite utilizar en ellas instrucciones de RAPID del tipo WaitTime,
WatiDI, etc.
evite utilizar en ellas instrucciones de RAPID del tipo WaitTime,
WaitDI, etc.
40502, Interrupción de entrada digital
Descripción
Tarea: arg.
Continúa en la página siguiente
256
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Una entrada digital interrumpió la ejecución.
El parámetro arg de arg está especificado con un valor negativo.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Recuperación: arg.
El parámetro debe estar definido como un valor positivo.
40504, Error de parámetro
40512, Falta un valor de eje externo
Descripción
Descripción
Tarea: arg
Algún eje externo activo tiene un valor de orden incorrecto o
arg
inexistente.
arg
Acciones recomendadas
arg.
Reprograme la posición.
Acciones recomendadas
40513, Error de unidad mecánica
Recuperación: arg.
40506, Error de acceso al sistema
Descripción
Tarea: arg.
Descripción
Imposible activar o desactivar la unidad mecánica. Es posible
Tarea: arg
que el mensaje anterior contenga más información.
arg
Ref. de programa arg.
arg
arg.
40514, Error de ejecución
Acciones recomendadas
Descripción
Recuperación: arg.
Tarea: arg.
El robot está demasiado lejos de la trayectoria para realizar
40507, Error de límite
una operación StartMove con el movimiento interrumpido.
Ref. de programa arg.
Descripción
Tarea: arg.
Acciones recomendadas
Imposible seguir retrocediendo en la trayectoria arg.
Posicione el robot en la posición interrumpida del programa.
Ref. de programa arg.
Recuperación: arg.
Acciones recomendadas
40515, Error de tipo
Recuperación: arg.
Descripción
40508, Error de valor de orientación
Tarea: arg.
Tipo de dato no válido en un argumento del parámetro arg.
Descripción
Tarea: arg.
Acciones recomendadas
Valor de orientación incorrecto en arg.
Cambie el parámetro a un tipo válido. Asegúrese de que el tipo
Ref. de programa arg.
del valor sea de valor o semivalor.
Acciones recomendadas
Todas las orientaciones utilizadas deben estar normalizadas,
40518, Error de tipo
es decir, la suma de los cuadrados de los elementos del
Descripción
cuaternio debe ser 1.
Tarea: arg.
El tipo esperado es distinto del tipo leído en arg.
40511, Error de parámetro
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
Compruebe el tipo en el argumento.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
257
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40519, Fin de archivo
La unidad mecánica arg no es una unidad mecánica simple.
Ref. de programa arg.
Descripción
Tarea: arg.
Se ha encontrado un fin de archivo antes de leer todos los
40527, Error de acceso a archivo
bytes de arg.
Descripción
Ref. de programa arg.
Tarea: arg.
Imposible abrir arg.
Acciones recomendadas
Ref. de programa arg.
Recuperación: arg.
Causas probables
40522, Error de límite
La referencia al dispositivo de E/S ya se está utilizando.
Descripción
Acciones recomendadas
Tarea: arg.
Si la referencia al dispositivo de E/S ya se está utilizando,
Desbordamiento de cronómetro.
ciérrela o utilice otra. Recuperación: arg.
Ref. de programa arg.
40528, Error de acceso a archivo
Acciones recomendadas
Descripción
Recuperación: arg.
Tarea: arg.
40523, Conflicto de unidad mecánica
El archivo o el canal serie no están abiertos.
Ref. de programa. arg.
Descripción
Imposible activar la unidad mecánica arg dado que la unidad
Causas probables
mecánica arg ya está activa.
El dispositivo de E/S no está abierto o ya ha sido cerrado.
Acciones recomendadas
Acciones recomendadas
Compruebe la configuración de movimientos. Las unidades
Compruebe si el dispositivo está abierto. Recuperación: arg.
mecánicas activas no pueden tener el mismo arg: Eje físico.
Eje lógico. Configuración de unidad de accionamiento.
40529, Error de acceso a archivo
Descripción
40524, Error de acceso a transportador
Tarea: arg.
Descripción
Imposible acceder el archivo arg.
Tarea: arg.
Ref. de programa arg.
El transportador no está activado.
Causas probables
Ref. de programa arg.
La ruta o el nombre de archivo son incorrectos. La referencia
Acciones recomendadas
al dispositivo de E/S ya se está utilizando. Se ha excedido el
Recuperación: arg.
número máximo de archivos abiertos al mismo tiempo. El disco
está lleno.
40525, Error de acceso a transportador
Acciones recomendadas
Compruebe la trayectoria o el nombre de archivo. Si la
Descripción
referencia al dispositivo de E/S ya se está utilizando, ciérrela
Tarea: arg.
o utilice otra. Compruebe el espacio del disco. Recuperación:
No hay un único número definido.
arg.
Ref. de programa arg.
40526, Error de acceso a transportador
40530, Error de parámetro
Descripción
Descripción
Tarea: arg.
Tarea: arg.
Continúa en la página siguiente
258
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
El número de caracteres del parámetro arg de WriteBin que se
desea escribir en el canal serie es mayor que el tamaño de la
matriz que contiene los caracteres que se desea escribir.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Abra el canal serie. Compruebe que la instrucción se utiliza
con un canal serie. Recuperación: arg.
Acciones recomendadas
Agrande la matriz o reduzca el parámetro.
40538, Tiempo máximo caducado
Descripción
40531, Error de parámetro
Tarea: arg.
Descripción
El tiempo de espera programado ha caducado.
Tarea: arg.
Ref. de programa arg.
La matriz arg de WriteBin es más pequeña que 0 o mayor que
255.
Acciones recomendadas
Recuperación: arg.
Ref. de programa arg.
40539, Error de acceso al sistema
Acciones recomendadas
Cambie el tamaño de la matriz para que sea de 0 a 255.
40534, Tiempo límite agotado
Descripción
Descripción
Tarea: arg.
Opción no permitida en esta tarea.
Ref. de programa arg.
Tarea: arg.
Un tiempo límite agotado interrumpió la ejecución.
.Ref. de programa arg.
40540, Error de acceso a archivo
Descripción
Acciones recomendadas
Tarea: arg.
Recuperación: arg.
arg no es un directorio.
Ref. de programa arg.
40535, Error de tipo
Acciones recomendadas
Descripción
Compruebe que la ruta sea la ruta correcta del directorio que
Tarea: arg.
desea abrir.
El dato que estaba intentando buscar en el archivo no era de
Recuperación: arg.
tipo numérico.
Ref. de programa arg.
40541, Error de acceso a archivo
Acciones recomendadas
Descripción
Recuperación: arg.
Tarea: arg.
El directorio arg no está disponible.
40536, Error de acceso al sistema
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
Compruebe el directorio que está intentando abrir.
Demasiadas peticiones de lectura pendientes.
Recuperación: arg.
Ref. de programa arg.
40542, Error de acceso a archivo
40537, Error de acceso a archivo
Descripción
Descripción
Tarea: arg.
Tarea: arg.
Imposible utilizar el sistema de archivos arg.
El canal serie no está abierto o está intentando usar la
Ref. de programa arg.
instrucción con un archivo.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
259
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40547, Error de acceso a archivo
Acciones recomendadas
Compruebe la ruta y el nombre del archivo. Recuperación: arg.
40543, Error de acceso a archivo
Descripción
Descripción
Tarea: arg.
Imposible cambiar el nombre del archivo arg.
Ref. de programa arg.
Tarea: arg.
Acciones recomendadas
Imposible abrir arg .
Compruebe la ruta. Compruebe el permiso de escritura del
Ref. de programa arg.
archivo cuyo nombre desea cambiar. Compruebe el permiso
Causas probables
de escritura y ejecución del directorio dentro del cual se
Ya hay demasiados directorios abiertos.
encuentra el archivo cuyo nombre desea cambiar.
Recuperación: arg.
Acciones recomendadas
Cierre uno de los directorios que ya tiene abiertos.
40548, Error de acceso a archivo
Recuperación: arg.
Descripción
40544, Error de acceso a archivo
Tarea: arg.
Imposible copiar el archivo arg.
Descripción
Ref. de programa arg.
Tarea: arg.
Imposible crear el directorio arg.
Acciones recomendadas
Ref. de programa arg.
Compruebe la ruta. Compruebe el permiso de escritura para
el directorio al que desea copiar el archivo. Compruebe el
Acciones recomendadas
Compruebe la ruta. Compruebe los permisos de escritura y
espacio disponible. Recuperación: arg.
ejecución del directorio dentro del cual se debe crear el nuevo
40549, Error de acceso al sistema
directorio. Recuperación: arg.
Descripción
40545, Error de acceso a archivo
Tarea: arg.
Unidad mecánica desconocida arg.
Descripción
El dato del tipo mecunit es desconocido para el sistema.
Tarea: arg.
Ref. de programa arg.
Imposible eliminar el directorio arg.
Ref. de programa arg.
Causas probables
El dato de tipo mecunit ha sido declarado en el programa.
Acciones recomendadas
Compruebe la ruta. Compruebe los permisos de escritura y
Acciones recomendadas
ejecución del directorio dentro del cual está situado el directorio
Elimine la declaración del dato de tipo mecunit del programa
que desea eliminar. Recuperación: arg.
y utilice uno de los tipos de datos mecunit predefinidos
(definidos automáticamente por el sistema).
40546, Error de acceso a archivo
40555, Error de E/S
Descripción
Tarea: arg.
Descripción
Imposible eliminar el archivo arg.
Tarea: arg.
Ref. de programa arg.
Imposible leer la señal de E/S.
Ref. de programa arg.
Acciones recomendadas
Compruebe la ruta. Compruebe si tiene permisos de escritura
para el archivo. Compruebe los permisos de escritura y
40556, Error de E/S
ejecución del directorio dentro del cual está situado el archivo
Descripción
que desea eliminar. Recuperación: arg.
Tarea: arg.
Continúa en la página siguiente
260
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Imposible escribir en la señal de E/S.
Número de eje desconocido para la unidad mecánica arg.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
40557, Error de E/S
Compruebe el valor del argumento AxisNo.
Descripción
Recuperación: arg.
Tarea: arg.
Error de configuración de la señal de E/S.
Ref. de programa arg.
40563, Error de acceso al sistema
Descripción
Acciones recomendadas
Tarea: arg.
Compruebe la definición de configuración o de alias de la señal
Unidad mecánica arg inactiva.
de E/S.
Ref. de programa arg.
Acciones recomendadas
40558, Error de E/S
Active la unidad mecánica.
Descripción
Recuperación: arg.
Tarea: arg.
Imposible leer la señal de E/Sarg del dispositivo de E/S arg.
Ref. de programa arg.
40564, Error de argumento
Descripción
Tarea: arg.
40559, Error de E/S
Error de definición de orientación.
Descripción
La base de coordenadas de fijación de GripLoad en la
Tarea: arg.
herramienta o el objeto de trabajo (usuario + objeto) no está
Imposible escribir en la señal de E/Sarg del dispositivo de E/S
normalizada.
arg.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Compruebe la orientación. Todas las orientaciones utilizadas
40560, Error de acceso al sistema
deben estar normalizadas, es decir, la suma de los cuadrados
de los elementos del cuaternio debe ser 1.
Descripción
Tarea: arg.
Imposible guardar el módulo de programa arg.
Ref. de programa arg.
40565, Error de parámetro
Descripción
Tarea: arg.
40561, Error de acceso al sistema
Los dos argumentos deben ser > 0.
Ref. de programa arg.
Descripción
Tarea: arg.
Acciones recomendadas
arg no es un nombre de módulo.
Compruebe el valor de los argumentos.
Ref. de programa arg.
40566, Error de parámetro
Consecuencias
Imposible descargar, guardar o borrar este módulo.
Descripción
Acciones recomendadas
Tarea: arg.
Compruebe el nombre del módulo.
Todos los argumentos deben ser > arg y <= arg.
Ref. de programa arg.
40562, Error de parámetro
Acciones recomendadas
Compruebe el valor de los argumentos.
Descripción
Tarea: arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
261
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40567, Error de parámetro
40572, Error de argumento
Descripción
Descripción
Tarea: arg.
Tarea: arg.
Error de cuaternio.
El valor del parámetro DecelMax es demasiado bajo.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Compruebe el componente aom de loaddata.
Aumente el valor del parámetro DecelMax.
Recuperación: arg.
40568, Error de parámetro
40573, Error de argumento
Descripción
Tarea: arg.
Descripción
El eje no puede tener un valor menor que 0.
Tarea: arg.
Ref. de programa arg.
El valor del argumento On es demasiado bajo.
Ref. de programa arg.
Acciones recomendadas
Cambie el valor a un número positivo.
Acciones recomendadas
Aumente el valor del argumento On.
40569, Error de argumento
Recuperación: arg.
Descripción
40574, Aviso de búsqueda
Tarea: arg.
El argumento AccMax debe estar definido si el argumento
Descripción
AccLim tiene el valor TRUE.
Tarea: arg.
Ref. de programa arg.
El número de coincidencias durante la búsqueda fue arg.
Antes de realizar la búsqueda siguiente, asegúrese de mover
Acciones recomendadas
Asigne un valor al argumento AccMax.
el TCP a la posición inicial de la trayectoria de búsqueda.
Ref. de programa arg.
40570, Error de argumento
Consecuencias
Si no se realiza el reposicionamiento antes de reiniciar una
Descripción
búsqueda circular, los movimientos resultantes pueden causar
Tarea: arg.
El argumento DecelMax debe estar definido si el argumento
daños.
DecelLim tiene el valor TRUE.
Acciones recomendadas
Ref. de programa arg.
Recuperación: arg.
Acciones recomendadas
Asigne un valor al argumento DecelMax.
40576, Error de ParId
Descripción
40571, Error de argumento
Tarea: arg.
El tamaño de matriz del argumento AxValid no es igual al
Descripción
número de ejes.
Tarea: arg.
El valor del parámetro AccMax es demasiado bajo.
Ref. de programa arg.
Acciones recomendadas
Ref. de programa arg.
Compruebe el tamaño de la matriz.
Acciones recomendadas
Aumente el valor del parámetro AccMax.
Recuperación: arg.
40577, Error de ParId
Descripción
Tarea: arg.
Continúa en la página siguiente
262
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Esta identificación de parámetros no puede realizarse en este
Acciones recomendadas
tipo de robot.
Compruebe toda la secuencia de ParId.
Ref. de programa arg.
40583, Error de ParId
40578, Error de ParId
Descripción
Descripción
Tarea: arg.
Tarea: arg.
No se permite la ejecución hacia atrás.
Falta el argumento opcional PayLoad. Para usar la identificación
Ref. de programa arg.
de carga útil, debe especificar este argumento.
Ref. de programa arg.
40584, Error de ParId
Acciones recomendadas
Descripción
Asigne un valor al argumento PayLoad.
Tarea: arg.
ParIdMoveSeq / parámetro NextMove:
40579, Error de ParId
Tamaño de matriz incorrecto.
Ref. de programa arg.
Descripción
Tarea: arg.
Acciones recomendadas
El argumento opcional PayLoad sólo debe usarse para la
Compruebe el tamaño de la matriz.
identificación de la carga útil.
Ref. de programa arg.
40585, Error de ParId
Acciones recomendadas
Descripción
Elimine el argumento PayLoad.
Tarea: arg.
Falta el argumento WObj de LoadId para una carga útil con
40580, Error de ParId
TCP fijo.
Ref. de programa arg.
Descripción
Tarea: arg.
Acciones recomendadas
Estado incorrecto para LoadIdInit.
Añada el argumento WObj.
Ref. de programa arg.
Acciones recomendadas
40586, Error de ParId
Compruebe toda la secuencia de ParId.
Descripción
Tarea: arg.
40581, Error de ParId
Argumento WObj no permitido. Este argumento sólo debe
usarse para una carga útil con TCP fijo.
Descripción
Ref. de programa arg.
Tarea: arg.
Estado incorrecto para ParIdMoveSeq.
Acciones recomendadas
Ref. de programa arg.
Elimine el argumento WObj.
Acciones recomendadas
Compruebe toda la secuencia de ParId.
40587, Error de ParId
Descripción
40582, Error de ParId
Tarea: arg.
ParIdMoveSeq / parámetro MoveData:
Descripción
Tamaño de matriz incorrecto.
Tarea: arg.
Ref. de programa arg.
Estado incorrecto para LoadIdInit.
Ref. de programa arg.
Acciones recomendadas
Compruebe el tamaño de la matriz.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
263
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40588, Error de ParId
40593, Caída de alimentación durante la
identificación de carga
Descripción
Tarea: arg.
Descripción
ParIdMove / parámetro StartIndex:
Tarea: arg.
StartIndex incorrecto.
Las caídas de alimentación durante la identificación de la carga
Ref. de programa arg.
darán lugar a resultados de carga incorrectos.
Ref. de programa arg.
Acciones recomendadas
Compruebe el valor de StartIndex.
Acciones recomendadas
Reinicie de nuevo la ejecución del programa con el mismo
40589, Error de ParId
modo de ejecución (sin mover el PP) para realizar la
identificación de carga desde el principio.
Descripción
Recuperación: arg.
Tarea: arg.
ParIdMove / parámetro StartIndex:
Apunta a un tipo de movimiento negativo.
Ref. de programa arg.
40594, Error de usuario durante la identificación
de carga
Descripción
40590, Error de ParId
Tarea: arg.
Se ha producido un error que ha producido el desplazamiento
Descripción
del PP al comienzo del procedimiento de identificación de carga.
arg
Ref. de programa arg.
arg.
Acciones recomendadas
Acciones recomendadas
Vuelva a empezar el procedimiento de identificación desde el
arg.
principio.
Recuperación: arg.
40591, Error de argumento
40595, Error de argumento
Descripción
Tarea: arg.
Tipo desconocido de identificación de parámetro.
Ref. de programa arg.
Descripción
Tarea: arg.
Tipo desconocido de identificación de carga.
Acciones recomendadas
Ref. de programa arg.
Compruebe el argumento ParIdType.
40592, Programa detenido durante la
identificación de carga
Descripción
Tarea: arg.
No se permite ningún tipo de detención del programa durante
la identificación de carga.
Acciones recomendadas
Compruebe el argumento LoadIdType.
40596, Programa detenido durante la
identificación de carga
Descripción
Tarea: arg.
No se permite ningún tipo de detención del programa durante
Ref. de programa arg.
la identificación de carga.
Acciones recomendadas
Ref. de programa arg.
Vuelva a empezar el procedimiento de identificación desde el
principio.
Acciones recomendadas
Vuelva a reiniciar la ejecución del programa desde el principio
Recuperación: arg.
para la identificación de la carga.
Continúa en la página siguiente
264
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40597, Redefinición de velocidad
Acciones recomendadas
Reinicie el programa. De ese modo será posible volver a la
Descripción
posición de inicio de identificación de la carga. A continuación,
Tarea: arg.
La redefinición de velocidad no es del 100 por ciento.
Ref. de programa arg.
puede iniciarse de nuevo la secuencia de movimientos. También
es posible cancelar completamente la rutina de servicio para
omitir la identificación de la carga.
Acciones recomendadas
Cambie la redefinición de velocidad a 100. Vuelva a reiniciar
40603, Error de argumento
la ejecución del programa desde el principio para la
Descripción
identificación de la carga.
El argumento arg no debe tener un valor negativo.
40598, Programa detenido durante la
identificación de carga
Descripción
No se permite ningún tipo de detención del programa durante
los movimientos de identificación de carga.
Acciones recomendadas
Cambie el valor del argumento arg a un valor positivo.
40607, Error de ejecución
Descripción
Tarea: arg.
Consecuencias
No es posible completar la secuencia de identificación de carga.
Recuerde que algunos ejes de la unidad mecánica actual se
encuentran ahora en el modo independiente.
No se permite cambiar el modo de ejecución de hacia delante
a hacia atrás ni viceversa durante la realización de un
movimiento circular.
Ref. de programa arg.
Causas probables
Interrupción de la secuencia de identificación de carga con un
paro de programa, o bien liberación del dispositivo de
Acciones recomendadas
Si es posible, seleccione el modo de ejecución original y
presione la tecla de inicio para continuar con el movimiento
habilitación.
circular detenido. Si no es posible, mueva el robot y el puntero
Acciones recomendadas
de programa para un nuevo inicio.
Reinicie el programa. De ese modo será posible volver a la
posición de inicio de identificación de la carga. A continuación,
puede iniciarse de nuevo la secuencia de movimientos. También
40609, Error de argumento
es posible cancelar completamente la rutina de servicio para
Descripción
omitir la identificación de la carga.
Tarea: arg.
El argumento \WObj especifica una unidad mecánica con un
40599, Programa detenido durante la
identificación de cargas
nombre demasiado largo.
Ref. de programa arg.
Acciones recomendadas
Descripción
No se permite ningún tipo de detención del programa durante
los movimientos de identificación de cargas.
Consecuencias
No es posible completar la secuencia de identificación de carga.
Utilice un máximo de 16 caracteres para especificar el nombre
de una unidad mecánica coordinada.
40611, Error de ejecución
Recuerde que algunos ejes de la unidad mecánica actual se
Descripción
encuentran ahora en el modo independiente.
Tarea: arg.
No se permite retroceder paso a paso con esta instrucción de
Causas probables
Un paro de programa provocó errores en las mediciones, lo
cual se detectó al reiniciar los movimientos de identificación
movimiento.
Ref. de programa arg.
de cargas.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
265
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Consecuencias
Acciones recomendadas
El retroceso paso a paso hasta una posición definida con otra
Los grupos de señales digitales de entrada/salida, las
herramienta u objeto de trabajo puede dar lugar a una
identidades de proceso o los selectores de proceso sólo pueden
trayectoria defectuosa.
tener valores enteros.
Acciones recomendadas
Compruebe la herramienta y el objeto de trabajo.
40616, Error de argumento
Descripción
40612, Error de argumento
Tarea: arg.
El argumento arg está fuera de los límites permitidos.
Descripción
Ref. de programa arg.
Tarea: arg.
No se ha programado ningún argumento para el nombre de la
Acciones recomendadas
señal de salida.
El grupo de señales digitales de entrada/salida sólo puede tener
Ref. de programa arg.
u ofrecer un valor de 0 a arg según la configuración de los
parámetros del sistema.
Acciones recomendadas
Es posible establecer una E/S de posición fija como una señal
Recuperación: arg.
de salida digital, un grupo de salidas digitales o un grupo de
salidas analógicas durante el movimiento del robot.
40617, Error de argumento
Descripción
40613, Error de argumento
Tarea arg:
Uno de los argumentos SetValue, SetDvalue, CheckValue o
Descripción
CheckDvalue está fuera de los límites permitidos.
Tarea: arg.
El argumento opcional arg sólo puede combinarse con el
Ref. de programa arg.
argumento de señal de salida arg.
Causas probables
Ref. de programa arg.
La señal analógica sólo puede ser activada/consultada entre
arg y arg de acuerdo con la configuración de parámetros del
Acciones recomendadas
Compruebe y cambie los argumentos.
sistema de E/S.
Acciones recomendadas
40614, Error de argumento
Compruebe el programa de RAPID o la configuración de E/S.
Recuperación: arg.
Descripción
Tarea: arg.
40620, Error de argumento
El argumento arg no es 0 ni 1.
Ref. de programa arg.
Descripción
Tarea: arg.
Acciones recomendadas
Las señales de datos sólo pueden tener u ofrecer el valor 0 ó
El argumento arg tiene un valor negativo demasiado alto.
Ref. de programa arg.
1.
Acciones recomendadas
40615, Error de argumento
Cambie el valor del argumento arg a arg o más.
Descripción
40622, Error de argumento
Tarea: arg.
El argumento arg no es un valor entero.
Descripción
Ref. de programa arg.
Tarea: arg.
El valor del argumento Time es demasiado bajo para las
interrupciones cíclicas.
Ref. de programa arg.
Continúa en la página siguiente
266
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40632, Error de instrucción
Acciones recomendadas
Cambie el valor de Time a un valor igual o superior a los 0,1 s.
Descripción
Tarea: arg.
40623, Error de argumento
No se permite ninguna instrucción de movimiento con una
Descripción
ejecución de programa de RAPID concurrente dentro de la
Tarea: arg.
parte StorePath-RestoPath del programa.
El valor del argumento Time es demasiado bajo para las
Ref. de programa arg.
interrupciones únicas.
Acciones recomendadas
Ref. de programa arg.
Edite el programa de forma que no contenga ninguna
Acciones recomendadas
instrucción MoveX \Conc dentro de la parte
Cambie el valor de Time a un valor igual o superior a los 0,01
StorePath-RestoPath del programa.
s.
40634, Error de referencia
40624, Error de argumento
Descripción
Descripción
Tarea: arg.
Tarea: arg.
La señal arg es desconocida en el sistema.
El argumento arg no está entre 0 y 2.
Ref. de programa arg.
Ref. de programa arg.
Causas probables
Acciones recomendadas
Si la señal está definida en el programa de RAPID, debe estar
Especifique el flanco para generar la interrupción.
conectada a la señal configurada con la instrucción AliasIO.
0 = Flanco negativo (alto -> bajo).
Acciones recomendadas
1 = Flanco positivo (bajo -> alto).
Todas las señales (excepto las señales AliasIO) deben estar
2 = Tanto el flanco negativo como el positivo.
definidas en los parámetros del sistema y no pueden definirse
en el programa de RAPID.
40625, Error de límite
Recuperación: arg.
Descripción
40636, Error de sensor
Tarea: arg.
El robot está fuera de límites.
Descripción
Ref. de programa arg.
Tarea: arg.
Causas probables
No se obtiene ninguna medición del sensor.
Eje fuera del área de trabajo. Se han superado los límites de
Ref. de programa arg.
al menos un eje acoplado.
Acciones recomendadas
Acciones recomendadas
El dato solicitado no está disponible.
Recuperación: arg.
Recuperación: arg.
40631, Error de instrucción
40637, Error de sensor
Descripción
Descripción
Tarea: arg.
Tarea: arg.
Demasiadas instrucciones de movimiento en secuencia con
Aún no preparada.
una ejecución de programa de RAPID concurrente.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
La función solicitada aún no está disponible.
Edite el programa para realizar 5 MoveX \Conc en secuencia
Recuperación: arg.
en el nivel de ejecución básica del programa.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
267
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40638, Error de sensor
Acciones recomendadas
Alarma de un equipo externo.
Descripción
Recuperación: arg.
Tarea: arg.
Error general.
40643, Error de sensor
Ref. de programa arg.
Descripción
Acciones recomendadas
Se ha producido un error general que no está relacionado
específicamente con la acción solicitada. Lea el bloque "Error
Tarea: arg.
Alarma de cámara.
Ref. de programa arg.
log" si la función está disponible.
Acciones recomendadas
Recuperación: arg.
Se ha detectado algún error en la cámara. Realice una prueba
40639, Error de sensor
Camcheck para comprobar si la cámara se encuentra en buen
estado.
Descripción
Recuperación: arg.
Tarea: arg.
Sensor ocupado. Inténtelo más tarde.
Ref. de programa. arg.
40644, Error de sensor
Descripción
Acciones recomendadas
El sensor está ocupado con otra función.
Tarea: arg.
Alarma de temperatura.
Recuperación: arg.
Ref. de programa arg.
40640, Error de sensor
Acciones recomendadas
La cámara está sobrecalentada y necesita más aire o agua de
Descripción
refrigeración.
Tarea: arg.
Recuperación: arg.
Error desconocido.
Ref. de programa arg.
40645, Error de sensor
Acciones recomendadas
La función solicitada del sensor es desconocida.
Descripción
Tarea: arg.
Recuperación: arg.
Valor fuera de rango.
Ref. de programa arg.
40641, Error de sensor
Acciones recomendadas
Descripción
El valor del dato enviado al sensor está fuera de rango.
Tarea: arg.
Variable o número de bloque no válido.
Ref. de programa arg.
Recuperación: arg.
40646, Error de sensor
Acciones recomendadas
La variable o el bloque solicitados no están definidos en el
Descripción
Tarea: arg.
sensor.
Fallo al comprobar la cámara.
Recuperación: arg.
Ref. de programa arg.
40642, Error de sensor
Acciones recomendadas
La función CAMCHECK ha fallado. La cámara está averiada.
Descripción
Envíela para su reparación.
Tarea: arg.
Recuperación: arg.
Alarma externa.
Ref. de programa arg.
Continúa en la página siguiente
268
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40647, Error de sensor
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
Ninguno de los parámetros opcionales y modificadores
Tiempo límite de comunicación agotado.
conserva el sistema de coordenadas anterior. El modificador
Ref. de programa arg.
Old tiene la misma función. RefPos o RefNum debe definirse
con Short, Fwd o Bwd.
Acciones recomendadas
Aumente el tiempo límite y compruebe las conexiones del
sensor.
40651, Use una entrada numérica
Descripción
Recuperación: arg.
Tarea: arg.
40648, Error de búsqueda
Use una entrada numérica para la posición, en lugar de un
robtarget.
Descripción
Ref. de programa arg.
Tarea: arg.
No se permite ejecutar StorePath mientras la búsqueda está
Acciones recomendadas
activa en el nivel base de trayectoria de movimiento.
No es posible usar un robtarget para definir la posición de los
Ref. de programa arg.
ejes del robot. Utilice el parámetro opcional para la introducción
numérica de la posición.
Consecuencias
Programa detenido.
40652, Eje en movimiento
Causas probables
Ejecución de la instrucción StorePath mientras había una
Descripción
Tarea: arg.
búsqueda activa.
Un eje del robot, un eje externo o un eje independiente está en
Acciones recomendadas
movimiento.
No es posible utilizar StorePath en una rutina TRAP, de evento
Ref. de programa arg.
o de servicio mientras hay una búsqueda activa en el nivel base
Acciones recomendadas
de trayectoria de movimiento.
Si se utilizan interrupciones en el programa para la ejecución
de rutinas TRAP, estas interrupciones deben ser desactivadas
Todos los ejes del robot, ejes externos y ejes independientes
deben estar parados. Utilice MoveL con el argumento Fine para
los ejes del robot y externos. Utilice IndRMove para los ejes
durante cualquier búsqueda.
Por ejemplo: ISleep - SearchL - IWatch.
independientes.
Recuperación: arg.
40649, Limitación de ruta
40654, Eje no activo
Descripción
Descripción
Tarea: arg.
arg se ha realizado. Es necesario ejecutar en primer lugar la
instrucción arg antes de realizar un nuevo arg.
Tarea: arg.
La posición de destino del eje a la que debe moverse no está
definida (9E9) o el eje a mover no está activo en este momento.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Causas probables
Compruebe el programa de RAPID.
La posición a la que debe moverse ha sido programada sin
40650, Combinación de parámetros incorrecta
ninguna unidad mecánica activa. La posición a la que debe
moverse ha sido modificada mientras la unidad mecánica
Descripción
estaba desactivada. La unidad mecánica no está activada en
Tarea: arg.
este momento.
Los parámetros opcionales y modificadores no se usan en una
combinación correcta.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
269
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40662, Tipo de zona mundo no válido
Acciones recomendadas
La unidad mecánica debe estar activada antes de modificar la
posición de destino o moverse hasta ella.
Recuperación: arg.
Descripción
Tarea: arg.
El modificador \arg debe estar asociado con una zona mundo
arg.
40655, Eje no independiente
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
Si se utiliza el modificador \Temp, el tipo de dato debe ser
El eje no se encuentra en el modo independiente.
Ref. de programa arg.
wztemporary en WorldZone.
Si se utiliza el modificador \Stat, el tipo de dato debe ser
Consecuencias
wzstationary en WorldZone.
Sólo es posible obtener el estado de los ejes que se encuentran
en el modo independiente.
40663, Zona mundo no utilizada
Acciones recomendadas
Descripción
Cambie todos los ejes al modo independiente.
Tarea: arg.
Recuperación: arg.
El argumento arg de la instrucción arg hace referencia a una
zona mundo no utilizada.
40658, Error de parámetro
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
La zona mundo debe estar definida y activada por una
El parámetro arg sólo puede usarse si el parámetro arg es
instrucción WZLimSup o WZDOSet.
mayor que cero.
Ref. de programa arg.
40664, Zona mundo ya utilizada
Acciones recomendadas
Descripción
El parámetro arg sólo tiene efecto sobre la primera instrucción
Tarea: arg.
TriggX, en una secuencia de varias instrucciones TriggX, que
La zona mundo 'arg' ya ha sido definida y activada.
controla la señal proporcional AO de velocidad.
Las zonas mundo sólo pueden ser definidas una vez.
Ref. de programa arg.
40661, Error de búsqueda
Acciones recomendadas
Descripción
Utilice una zona mundo con otro nombre.
Tarea: arg.
La señal arg para la instrucción SearchX ya tiene el valor
especificado (alto o bajo) al principio de la búsqueda, o el
dispositivo de E/S de la señal no está en funcionamiento para
este caso.
Antes de realizar la búsqueda siguiente, asegúrese de mover
el TCP a la posición inicial de la trayectoria de búsqueda.
Ref. de programa arg.
40665, Demasiadas zonas mundo
Descripción
Tarea: arg.
No es posible añadir la zona mundo arg. La tabla de zonas
mundo está llena.
Ref. de programa. arg.
Acciones recomendadas
Consecuencias
Si no se realiza el reposicionamiento antes de reiniciar una
búsqueda circular, los movimientos resultantes pueden causar
daños.
Compruebe el programa de RAPID para comprobar si puede
eliminar alguna de las zonas mundo.
40666, Zonas mundo no válidas
Acciones recomendadas
Descripción
Recuperación: arg.
Tarea: arg.
Continúa en la página siguiente
270
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
La zona mundo 'arg' ha sido definida localmente en la rutina
actual.
40671, Uso no válido de la zona mundo
Descripción
Ref. de programa arg.
Tarea: arg.
Acciones recomendadas
El argumento 'arg' de arg debe ser una zona mundo temporal.
Defina la zona mundo como global o local en el módulo.
Ref. de programa arg.
40667, Zonas mundo no válidas
Acciones recomendadas
Compruebe el argumento.
Descripción
40672, Zona mundo ya utilizada
Tarea: arg.
El argumento WorldZone arg no es una referencia de dato
completa.
Descripción
Tarea: arg.
Ref. de programa arg.
No es posible añadir la zona mundo arg . Ya hay otra zona
Acciones recomendadas
mundo definida con el mismo nombre en el sistema.
Compruebe el valor del argumento WorldZone.
Ref. de programa arg.
40668, Dato de forma no utilizado
Acciones recomendadas
Compruebe el nombre de la zona mundo.
Descripción
40673, Error de acceso de E/S
Tarea: arg.
El argumento 'arg' de la instrucción arg debe hacer referencia
a un dato de forma definido.
Descripción
Tarea: arg.
Ref. de programa arg.
La señal indicada en el parámetro arg está protegida contra
Acciones recomendadas
escritura para el acceso de RAPID.
El dato de forma se utiliza para almacenar una definición de
Ref. de programa arg.
volumen. Debe definirlo con WZBoxDef, WZSphDef o WZCylDef
antes de usarlo desde WZLimSup o WZDOSet.
40669, Zona mundo demasiado pequeña
Acciones recomendadas
Seleccione otra señal de usuario o cambie el modo de acceso
de la señal.
40674, Error de acceso de E/S
Descripción
Tarea: arg.
Al menos un lado o radio es menor que el mínimo permitido
en la instrucción arg .
Descripción
Tarea: arg.
La señal de E/S arg no está protegida contra escritura para el
Ref. de programa arg.
acceso de usuario desde el FlexPendant o RAPID.
Acciones recomendadas
Ref. de programa arg.
Compruebe la instrucción de definición de volumen anterior.
40670, Zona mundo no válida
Acciones recomendadas
Cambie el modo de acceso al tipo ReadOnly para la señal en
la configuración de E/S.
Descripción
40675, Error de ejecución
Tarea: arg.
El índice del argumento de zona mundo arg de arg no es un
índice válido definido por WZLimSup o WZDOSet.
Ref. de programa arg.
Descripción
No se permite cambiar el modo de ejecución de hacia delante
a hacia atrás ni viceversa al ejecutar una rutina TRAP invisible.
Acciones recomendadas
Acciones recomendadas
Compruebe el programa de RAPID.
Si es posible, seleccione el modo de ejecución original y
presione la tecla de inicio para continuar.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
271
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40676, Error de parámetro
40680, Error de parámetro
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El valor de DeltaJointVal del eje de robot arg es <= 0.
Error en el valor de WZHomeJointDef utilizado. No se permite
Ref. de programa arg.
especificar la supervisión del eje inactivo arg.
Ref. de programa arg.
Acciones recomendadas
Compruebe el valor de DeltaJointVal. El valor de DeltaJointVal
Acciones recomendadas
de todos los ejes que se desee supervisar debe ser > 0 mm o
Cambie el argumento MiddleJointVal a 9E9 para el eje afectado.
grados.
40681, Error de parámetro
40677, Error de parámetro
Descripción
Descripción
Tarea: arg.
Tarea: arg.
Error en el valor de WZLimJointDef utilizado. No se permite
El valor de DeltaJointVal del eje externo arg es <= 0.
especificar la limitación del eje inactivo arg.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Compruebe el valor de DeltaJointVal. El valor de DeltaJointVal
Cambie los argumentos LowJointVal y HighJointVal a 9E9 para
de todos los ejes que se desee supervisar debe ser > 0 mm o
el eje afectado.
grados.
40698, Error de lectura
40678, Error de parámetro
Descripción
Descripción
La tarea arg está intentando leer el archivo arg pero no lo
Tarea: arg.
consigue.
El valor de LowJointVal es mayor que o igual al valor de
HighJointVal para el eje de robot arg.
Consecuencias
No fue posible leer o cargar arg.
Ref. de programa arg.
Causas probables
Acciones recomendadas
Si está intentando utilizar un archivo de un disco de FTP
Compruebe los valores de HighJointVal y LowJointVal. El valor
de HighJointVal debe ser mayor que el valor de LowJointVal
en todos los ejes que tengan límites superiores y/o inferiores
montado, asegúrese de que el tamaño de arg no sea mayor
que el tamaño de archivo máximo configurado en la
configuración del protocolo FTP.
definidos.
40699, Memoria de programas llena
40679, Error de parámetro
Descripción
Descripción
La tarea arg sólo dispone de arg bytes en su memoria de
Tarea: arg.
programas.
El valor de LowJointVal es mayor que o igual al valor de
Consecuencias
HighJointVal para el eje externo arg.
No fue posible cargar el módulo arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Compruebe los valores de HighJointVal y LowJointVal. El valor
de HighJointVal debe ser mayor que el valor de LowJointVal
en todos los ejes que tengan límites superiores y/o inferiores
Elimine algún otro módulo e inténtelo de nuevo. Compruebe si
sería posible dividir las estructuras de datos de gran tamaño
en bloques más pequeños. El uso de módulos instalados puede
ahorrar memoria de programas.
definidos.
Continúa en la página siguiente
272
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40700, Error de sintaxis
Causas probables
Módulo no cargado con la instrucción Load. No tiene la misma
Descripción
ruta de archivo que la utilizada con la instrucción Load.
Tarea: arg.
Acciones recomendadas
Error de sintaxis arg.
Compruebe si el módulo de programa ha sido cargado con la
40701, Memoria de programas llena
instrucción Load. Compruebe si la ruta y el nombre del archivo
son iguales en las instrucciones UnLoad y Load. Recuperación:
Descripción
arg.
La tarea arg sólo dispone de arg bytes libres en su espacio de
usuario.
40705, Error de sintaxis
Consecuencias
La operación solicitada no pudo ser completada.
Acciones recomendadas
Descripción
Tarea: arg.
Error de sintaxis arg.
Elimine otros módulos e inténtelo de nuevo. Compruebe si
sería posible dividir las estructuras de datos de gran tamaño
en bloques más pequeños. El uso de módulos instalados puede
ahorrar memoria de programas.
Acciones recomendadas
Encontrará más errores de sintaxis a continuación.
40706, Error de carga
40702, Archivo no encontrado
Descripción
Tarea: arg.
Descripción
El módulo de programa ya está cargado.
Tarea: arg.
Ref. de programa arg.
Imposible encontrar el archivo arg.
Causas probables
Ref. de programa arg.
El nombre de módulo que aparece en el encabezamiento del
Acciones recomendadas
Compruebe la ruta y el nombre de archivo. Compruebe si el
archivo arg ya existe en la memoria de programas.
Acciones recomendadas
archivo existe. Recuperación: arg.
Recuperación: arg.
40703, Error de descarga
40707, Nombre del dispositivo de E/S no válido
Descripción
Tarea: arg.
Descripción
Imposible cargar el módulo de programa. Se debe a que el
Tarea: arg.
módulo ha sido modificado pero no ha sido guardado.
El nombre del dispositivo de E/S arg no existe.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Instrucción UnLoad:
Compruebe si el nombre del dispositivo de E/S está bien escrito.
Utilice el modificador opcional ErrIfChanged, sin recuperación
Compruebe si el dispositivo de E/S está definido. Recuperación:
de esta situación, en un gestor de errores.
arg.
Recuperación: arg.
40708, Dispositivo de E/S no activado
40704, Error de descarga
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El dispositivo de E/S arg no fue activado.
arg.
Ref. de programa arg.
Imposible cargar el módulo de programa.
Causas probables
Ref. de programa arg.
El tiempo máximo de espera era demasiado breve.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
273
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40713, Error de definición de alias
Acciones recomendadas
Aumente el tiempo de espera o realice un reintento.
Recuperación: arg.
Descripción
Tarea: arg.
40709, El dispositivo de E/S no está desactivado
La señal del argumento FromSignal: arg debe ser definida en
la configuración de E/S y la señal del argumento ToSignal: arg,
Descripción
debe estar declarada en el programa de RAPID y no definida
Tarea: arg.
en la configuración de E/S.
El dispositivo de E/S arg no fue desactivado.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Causas probables
Compruebe la configuración de E/S y el programa de RAPID.
El tiempo máximo de espera era demasiado breve.
Recuperación: arg.
Acciones recomendadas
Aumente el tiempo de espera o realice un reintento.
40714, Error de argumento
Recuperación: arg.
Descripción
Tarea: arg.
40710, Error de argumento
Error de definición de orientación en arg.
Ref. de programa arg.
Descripción
Tarea: arg.
Acciones recomendadas
El argumento arg es un valor de expresión, no está presente
Es posible que sea una posición vacía generada fuera de línea
o es un modificador.
(orientación no definida), que debe ser modificada con modpos.
Ref. de programa arg.
Acciones recomendadas
40720, Instalación de alias de E/S
Cambie el parámetro arg a un tipo válido.
Descripción
Recuperación: arg.
El sistema no pudo actualizar todas las señales de E/S como
símbolos de RAPID.
40711, Error de tipo de alias
Consecuencias
Descripción
No es posible utilizar ninguna señal de E/S en un programa de
Tarea: arg.
RAPID.
Los tipos de datos de los argumentos FromSignal y ToSignal
deben ser iguales y deben ser del tipo signalxx.
Ref. de programa arg.
Causas probables
Configuración incorrecta de E/S. Configuración incorrecta de
tareas.
Acciones recomendadas
Acciones recomendadas
Cambie el tipo a un tipo válido (signalai/ao, signaldi/do,
Reinicie el controlador.
signalgi/go).
Recuperación: arg.
40721, Instalación de E/S
40712, Error de rutina de evento
Descripción
Tarea arg:
Descripción
El sistema no pudo actualizar todas las señales de E/S como
Tarea: arg.
símbolos de RAPID.
Demasiadas rutinas de evento. La rutina arg no se ejecutará.
Consecuencias
Acciones recomendadas
No es posible utilizar ninguna señal de E/S en un programa de
Encapsule la rutina en una de las otras rutinas especificadas
RAPID.
para el mismo evento.
Continúa en la página siguiente
274
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Causas probables
Acciones recomendadas
Configuración incorrecta de E/S. Configuración incorrecta de
Utilice el argumento FilePath para especificar el destino del
tareas.
archivo.
Recuperación: arg.
Acciones recomendadas
Reinicie el controlador.
40728, Error de base de coordenadas
40722, Unidades mecánicas
Descripción
Tarea: arg.
Descripción
El sistema no pudo actualizar todas las unidades mecánicas
Imposible calcular la nueva base de coordenadas.
Ref. de programa arg.
como símbolos de RAPID.
Causas probables
Consecuencias
No es posible usar unidades mecánicas en un programa de
Las posiciones no tienen las relaciones necesarias o no se han
especificado con una exactitud suficiente.
RAPID.
Acciones recomendadas
Causas probables
Configuración incorrecta de movimientos. Configuración
Compruebe si las posiciones están demasiado cercanas entre
sí, o no se han especificado con una exactitud suficiente.
incorrecta de tareas.
Recuperación: arg.
Acciones recomendadas
Reinicie el controlador.
40731, Error de valor
40724, Error de guardado o borrado
Descripción
Tarea: arg.
Descripción
El valor del argumento arg de la señal arg es superior a su valor
Tarea: arg.
lógico máximo.
No se pudo guardar o borrar el módulo de programa arg.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Cambie el argumento o cambie el parámetro de valor lógico
Compruebe si el nombre del módulo está bien escrito.
Compruebe si el módulo está cargado. Recuperación: arg.
40726, Error de referencia
máximo de la señal.
Recuperación: arg.
40732, Error de valor
Descripción
Descripción
Tarea: arg.
Tarea: arg.
La referencia de la sesión de carga no es válida.
Ref. de programa arg.
El valor del argumento arg de la señal arg es inferior a su valor
lógico mínimo.
Acciones recomendadas
Ref. de programa arg.
Compruebe si la referencia especificada es la misma que en
StartLoad.
Acciones recomendadas
Cambie el argumento o cambie el parámetro de valor lógico
Recuperación: arg.
mínimo de la señal.
Recuperación: arg.
40727, Error al guardar
40733, Error de valor
Descripción
Tarea: arg.
Descripción
Falta el archivo de origen arg.
Tarea: arg.
Ref. de programa arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
275
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
El valor del argumento arg de la señal arg es inferior al valor
del argumento arg.
Imposible reiniciar.
Causas probables
Ref. de programa arg.
La conexión con el módulo de E/S se ha interrumpido.
Acciones recomendadas
Acciones recomendadas
Cambie los valores de los argumentos.
Restablezca la conexión con el dispositivo de E/S. Para permitir
el reinicio del programa, sitúe el PP en una posición de reinicio
40734, Error de definición de símbolo
seguro.
Descripción
40739, Error de parámetro
Tarea: arg.
La cadena de la tabla de texto arg en el índice arg es demasiado
larga.
Descripción
Tarea: arg.
Ref. de programa. arg.
No ha especificado ninguno de los argumentos opcionales
Acciones recomendadas
DO1, GO1, GO2, GO3 o GO4.
Cambie el archivo de la tabla de texto y realice un
Ref. de programa arg.
restablecimiento de sistema.
Acciones recomendadas
Especifique al menos uno de los argumentos.
40735, Error de argumento
40740, Error de ejecución
Descripción
El eje no está definido.
Descripción
Acciones recomendadas
No es posible actualizar la variable PERS especificada en la
Debe definir el eje antes de ejecutar esta instrucción.
instrucción TriggStopProc porque ya no existe.
Causas probables
40736, Error de unidad mecánica
Es posible que el módulo de programa que contenía la variable
Descripción
PERS haya sido eliminado de la memoria de programas.
Tarea: arg.
Acciones recomendadas
No es posible usar esta instrucción para definir una carga útil
Compruebe si se ha eliminado el módulo que contenía la
en el robot.
variable PERS. Si es así, vuelva a cargarlo.
Ref. de programa arg.
40741, Error de contexto
Acciones recomendadas
Utilice la instrucción GripLoad en lugar de MechUnitLoad.
Descripción
Tarea: arg.
40737, Error de definición de símbolo
La instrucción arg sólo puede usarse en rutinas de evento.
Descripción
Ref. de programa arg.
Tarea: arg.
Acciones recomendadas
El texto solicitado o el paquete de texto no existe. Tabla de
Elimine la instrucción.
texto arg, índice arg.
Ref. de programa arg.
40742, Error de parámetro
Acciones recomendadas
Descripción
Compruebe los argumentos.
Tarea: arg.
Recuperación: arg.
El parámetro de temporizador DipLag es mayor que el tiempo
preestablecido en el parámetro de sistema Event.
40738, Error de E/S
Ref. de programa arg.
Descripción
Imposible leer la señal de E/Sarg del dispositivo de E/S arg.
Continúa en la página siguiente
276
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
Imposible leer o escribir el parámetro de sistema arg. Se trata
Aumente el tiempo preestablecido en el parámetro de sistema
de un parámetro interno y está protegido contra lectura y
Event o compruebe la compensación del parámetro DipLag.
escritura.
Recuperación: arg.
Ref. de programa arg.
Acciones recomendadas
40743, Error de parámetro
Recuperación: arg.
Descripción
40748, Error de valor
Tarea: arg.
Subtipo no válido en el argumento arg.
Ref. de programa arg.
Descripción
Tarea: arg.
Acciones recomendadas
El dato que se deseaba escribir desde el parámetro CfgData
Compruebe el argumento.
al parámetro de sistema está fuera de los límites válidos.
Ref. de programa arg.
40744, Error de parámetro
Acciones recomendadas
Descripción
Recuperación: arg.
Tarea: arg.
Valor no válido en arg en el argumento arg.
Ref. de programa arg.
40749, Error de ejecución
Descripción
Acciones recomendadas
Tarea: arg.
Compruebe el argumento.
No es posible ejecutar StartMove mientras el robot está en
movimiento.
40745, Error de parámetro
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
Recuperación: arg.
arg es menor que arg en el argumento arg.
Ref. de programa arg.
40752, Error de argumento
Acciones recomendadas
Descripción
Compruebe el argumento.
Tarea: arg.
Aún no ha finalizado una sesión de carga con StartLoad -
40746, Error de parámetro
WaitLoad.
Ref. de programa arg.
Descripción
Tarea: arg.
Acciones recomendadas
arg TRUE en el parámetro arg en combinación con la
Finalice la sesión de carga con WaitLoad, cancélela con
coordinación de transportador.
CancelLoad o sitúe el PP en Main.
Ref. de programa arg.
Recuperación: arg.
Acciones recomendadas
Imposible utilizar puntos finos al dejar los transportadores más
40753, Fallo de memoria
allá de un punto de paro coordinado.
Descripción
Utilice una zona en lugar de esta opción.
Tarea: arg.
Debido a una caída de alimentación durante la ejecución de la
40747, Error de acceso
instrucción Load o StartLoad ... WaitLoad, la memoria de
programas de RAPID contiene información no válida. *** PARA
Descripción
REPARAR, REALICE UN REINICIO AVANZADO "Restablecer
Tarea: arg.
RAPID" ***.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
277
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Ref. de programa. arg.
40758, Error de E/S
Acciones recomendadas
Descripción
Es importante realizar Restablecer RAPID, porque la memoria
Imposible utilizar la señal de E/S arg del dispositivo de E/S arg.
de programas de RAPID ha quedado dañada: Valor de
inicialización no válido en variables PERS. Reducción del
tamaño disponible para la memoria de programas.
Causas probables
La conexión con el módulo de E/S se ha interrumpido.
Acciones recomendadas
40754, Error de argumento
Restablezca la conexión con el dispositivo de E/S.
Descripción
40759, Error de parámetro
Tarea: arg.
No ha indicado ningún argumento.
Descripción
Ref. de programa arg.
Tarea: arg.
El argumento Data de arg tiene un tipo de dato no válido.
Acciones recomendadas
Si desea utilizar un límite, aplique un valor al argumento
opcional On. De lo contrario, aplique un valor a Off.
Ref. de programa arg.
Acciones recomendadas
Compruebe el tipo del dato. No se permite utilizar tipos de valor
40755, Error de contexto
ni de semivalor.
Descripción
40761, Error de parámetro
Tarea: arg.
La instrucción arg sólo puede usarse en rutinas TRAP.
Descripción
Ref. de programa arg.
Tarea: arg.
El argumento arg tiene un valor negativo.
Acciones recomendadas
Ref. de programa arg.
Elimine la instrucción.
Acciones recomendadas
40756, Error de contexto
Cambie el valor a un valor positivo o a cero.
Descripción
40762, Error de valor
Tarea: arg.
La instrucción arg sólo puede usarse en rutinas TRAP
Descripción
solicitadas mediante la instrucción arg.
Tarea: arg. El valor del argumento arg fuerza al robot a
Ref. de programa arg.
abandonar el área de trabajo.
Ref. de programa arg.
Acciones recomendadas
Asegúrese de que INTNO contenga el número de interrupción
Acciones recomendadas
utilizado por arg.
Reduzca el valor.
40757, Error de argumento
40763, Error de ejecución
Descripción
Descripción
Tarea: arg.
Tarea: arg. No es posible ejecutar la instrucción arg mientras
La sesión de carga que está intentando cancelar no se está
el sistema se encuentra en un estado de paro.
utilizando.
Ref. de programa arg.
Ref. de programa arg.
40764, Error de argumento de modificador
Acciones recomendadas
Recuperación: arg.
Descripción
Tarea: arg. La instrucción arg debe usarse con un argumento
de modificador.
Continúa en la página siguiente
278
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Ref. de programa arg.
Acciones recomendadas
Recuperación: arg.
Acciones recomendadas
Utilice el modificador Total o Free.
40770, Error de tipo de símbolo
40765, Error de argumento
Descripción
Tarea: arg.
Descripción
El símbolo arg es del tipo arg y no del tipo esperado arg.
Tarea: arg.
En la instrucción arg, el argumento arg no es un directorio
Ref. de programa arg.
abierto.
Acciones recomendadas
Ref. de programa arg.
Compruebe el programa de RAPID.
Recuperación: ERR_SYMBOL_TYPE.
Acciones recomendadas
Abra el directorio antes de intentar leerlo.
40771, Error de acceso a símbolo
Recuperación: arg.
Descripción
40766, Error de parámetro
Tarea: arg.
El símbolo arg no está disponible en este ámbito.
Descripción
Ref. de programa arg.
Tarea: arg.
En la instrucción arg, el argumento arg no puede usarse sin el
Acciones recomendadas
argumento arg.
Recuperación: arg.
Ref. de programa arg.
Acciones recomendadas
40772, Error de E/S
Compruebe el programa de RAPID.
Descripción
Tarea: arg.
40767, Error de búsqueda
La instrucción arg ha perdido el contacto con el transportador.
Ref. de programa arg.
Descripción
Tarea: arg.
No se pudo realizar una búsqueda del objeto del tipo arg.
40773, Instrucción interrumpida
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
Compruebe el programa de RAPID.
La instrucción arg se ha interrumpido por un motivo
desconocido.
40768, Error de acceso a símbolo
Descripción
Ref. de programa arg.
40774, Objeto desechado
Tarea: arg.
No hay ningún símbolo de sistema arg disponible en el sistema.
Descripción
Ref. de programa arg.
Tarea: arg.
El objeto que estaba esperando la instrucción arg ha sido
Acciones recomendadas
desechado.
Recuperación: arg.
Ref. de programa arg.
40769, Error de acceso de lectura a símbolo
Causas probables
Se ha sobrepasado la ventana de inicio o no se ha satisfecho
Descripción
el punto de comprobación.
Tarea: arg.
El símbolo arg no es un objeto que admita la lectura.
Ref. de programa arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
279
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
Acciones recomendadas
Si no se utiliza el punto de comprobación, es necesario cambiar
Compruebe la declaración de errnum.
a cero la distancia de punto de comprobación y la anchura de
la ventana de punto de comprobación.
Ejecute de nuevo la instrucción.
40780, Error de objeto de datos
Descripción
Recuperación: arg.
Tarea: arg.
40775, Error de transportador
Descripción
No hay ningún objeto de datos válido para el argumento arg
de la instrucción arg.
Ref. de programa arg.
Tarea: arg.
Acciones recomendadas
Otra instrucción arg está esperando una distancia respecto del
Compruebe si existe un objeto de datos correcto.
objeto.
Ref. de programa arg.
40781, Error de archivo
40776, Error de transportador
Descripción
Tarea: arg.
Descripción
El parámetro arg no se corresponde con ningún archivo de
Tarea: arg.
texto cargado.
Otra instrucción arg está esperando al objeto.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
40777, Error de transportador
Descripción
Compruebe si el archivo de texto está instalado (correctamente).
40782, Error de modo
Tarea: arg.
La instrucción arg ya está conectada.
Descripción
Tarea: arg.
Ref. de programa arg.
El archivo o el canal serie no están abiertos para escritura.
Acciones recomendadas
Ref. de programa arg.
Recuperación: arg.
Acciones recomendadas
Compruebe la forma en que ha abierto el archivo o el canal
40778, Error de valor
serie.
Descripción
Tarea: arg.
40783, Error de modo
El registro del nuevo número de error arg ha fallado. El valor
inicial debe ser -1 o el número anterior.
Descripción
Tarea: arg.
Ref. de programa arg.
El archivo o el canal serie no están abiertos con un modo
Acciones recomendadas
basado en caracteres.
Compruebe el valor inicial de la nueva variable errnum.
40779, Número de error como local
Descripción
Ref. de programa arg.
Acciones recomendadas
Compruebe la forma en que ha abierto el archivo o el canal
serie.
Tarea: arg.
El número de error de usuario de RAPID arg no debe estar
40784, Error de modo
declarado como local en la rutina.
Descripción
Ref. de programa arg.
Tarea: arg.
Continúa en la página siguiente
280
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
El archivo o el canal serie no están abiertos con un modo
El eje único no está inicializado correctamente.
binario.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
40789, Error de limitación
Compruebe la forma en que ha abierto el archivo o el canal
Descripción
serie.
Tarea: arg.
La longitud de cadena del argumento de la ruta de archivo es
40785, Error de modo
excesiva.
Ref. de programa arg.
Descripción
Tarea: arg.
Causas probables
El archivo o el canal serie no están abiertos para lectura.
La máxima longitud de cadena permitida para la totalidad de
Ref. de programa arg.
la ruta de archivos de sistema es arg caracteres.
Acciones recomendadas
Acciones recomendadas
Compruebe la forma en que ha abierto el archivo o el canal
Reduzca la longitud de la ruta.
serie.
40790, Error de valor
40786, Error de lectura
Descripción
Descripción
Tarea: arg.
Tarea: arg.
La cadena de RAPID es demasiado larga.
Uno o varios bytes no se leyeron correctamente. Es posible
Ref. de programa arg.
que el valor del dato leído no sea coherente.
Ref. de programa arg.
Causas probables
El valor de cadena supera la longitud máxima permitida.
Consecuencias
Acciones recomendadas
Dado que la suma de comprobación del mensaje recibido no
es la misma que la calculada en el momento del envío, los datos
Rescriba el programa para usar cadenas más cortas.
Recuperación: arg.
del mensaje no pueden utilizarse.
40791, Error de E/S
Causas probables
El motivo puede ser: Problema de comunicación. WriteAnyBin
diferente. Versión de software de ReadAnyBin diferente entre
el WriteAnyBin que envía y el ReadAnyBin que recibe.
Acciones recomendadas
Descripción
Tarea: arg.
No queda espacio en el dispositivo (nombre de archivo arg).
Ref. de programa arg.
Recuperación de errores para el problema de comunicación:
arg.
Acciones recomendadas
Recuperación: arg.
40787, Error de base de coordenadas de usuario
Descripción
40792, Error de E/S
Descripción
Tarea: arg.
Imposible obtener la base de coordenadas de usuario
coordinada.
Tarea: arg.
Error de apertura/acceso de archivo en la ruta arg.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Compruebe los permisos. ¿Está protegido contra escritura el
40788, Error de eje
archivo? Compruebe si el archivo o el directorio existen.
Descripción
Compruebe si queda espacio libre en el dispositivo.
Tarea: arg.
Recuperación: arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
281
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40793, Error al instalar la tabla de texto
tiempo de filtro de las señales de E/S. Evite las interrupciones
cíclicas.
Descripción
Tarea: arg.
Falta un nombre de recurso de texto o número de índice, o bien
40797, Error de E/S
es incorrecto, en el archivo de texto.
Descripción
Ref. de programa arg.
Imposible leer la señal de E/Sarg del dispositivo de E/S arg.
Consecuencias
Causas probables
Es posible que el contenido de algunas de las tablas de texto
La conexión con el módulo de E/S se ha interrumpido.
se haya dañado.
Acciones recomendadas
Restablezca la conexión con el dispositivo de E/S.
Acciones recomendadas
Corrija el error, restablezca el sistema e inténtelo de nuevo.
40798, Error de acceso al sistema
40794, Error al instalar la tabla de texto
Descripción
arg.
Descripción
Tarea: arg.
El índice especificado dentro del recurso de texto ya existe en
el sistema.
40799, Error de ejecución
Descripción
Ref. de programa arg.
Tarea: arg.
Causas probables
TestSignRead está usando un canal que no tiene ninguna señal
Error en la numeración del índice. El archivo ha sido instalado
definida.
dos veces.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Si se trata de un error en el índice, corríjalo, restablezca el
Use TestSignDefine para definir una señal para el canal.
sistema e inténtelo de nuevo.
40800, Error de herramienta
40795, Error al instalar la tabla de texto
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El componente robhold de la herramienta no tiene un valor
La memoria de sistema para tablas de texto está llena.
correcto.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Reduzca la cantidad de cadenas de texto definidas por el
Cambie el valor de robhold.
usuario que se instalan desde RAPID. Restablezca el sistema
Si el robot es el que sostiene la herramienta, el valor debe ser
e inténtelo de nuevo.
TRUE. Si el robot no es el que sostiene la herramienta, es decir,
si es una herramienta estacionaria, el valor debe ser FALSE.
40796, Error de sobrecarga
Descripción
40801, Error de cálculo
Tarea: arg.
Descripción
El sistema está sobrecargado, de forma que la orden actual no
Tarea: arg.
puede ser completada a tiempo.
Imposible calcular la base de coordenadas de la herramienta.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Causas probables
Reduzca la carga del ordenador principal, por ejemplo: Aumente
No es posible calcular la base de coordenadas de la
el valor de WaitTime en los bucles de RAPID. Aumente el
herramienta con los puntos de aproximación seleccionados.
Continúa en la página siguiente
282
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
40807, Error de archivo
Acciones recomendadas
Seleccione otros puntos de aproximación, con la máxima
exactitud posible.
Descripción
Tarea: arg.
El archivo arg ya existe.
40802, Error de ejecución
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
Para poder cambiar su nombre o copiarlo:
No es posible realizar la suscripción.
Cambie el nombre del archivo o elimine el archivo existente.
Ref. de programa arg.
Recuperación: arg.
Causas probables
variable.
40811, No hay comunicación con el dispositivo
de E/S
Acciones recomendadas
Descripción
¡Para continuar, debe mover el PP a Main!
Tarea: arg.
No queda memoria libre para hacer otra suscripción con esta
No hay comunicación con el dispositivo de E/S.
40803, Mensaje de error demasiado largo
Ref. de programa: arg.
Descripción
Causas probables
El mensaje de error era demasiado largo y ha sido recortado.
Es posible que el dispositivo haya sido desactivado. El
Esto significa que no podrá leer la totalidad del mensaje.
dispositivo de E/S no recibe alimentación.
40804, Error de argumento
40812, Error de ejecución
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El argumento "type" de stoppointdata no puede ser "followtime"
No se permite ejecutar este programa en el modo de ejecución
en las instrucciones MoveJ, MoveAbsJ y MoveExtJ.
sin movimientos.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Cambie el valor de "type" a "inpos" o "stoptime".
Cambie el modo.
40805, Error de movimiento
40813, Error de ejecución
Descripción
Descripción
Tarea: arg.
Tarea: arg.
Error de MocGenInstr.
La tarea no está autorizada a ejecutar la instrucción arg.
Consulte el mensaje anterior para conocer la causa.
Ref. de programa arg.
Ref. de programa arg.
Causas probables
La tarea no está configurada para controlar unidades
40806, Error de IOF
mecánicas.
Descripción
Acciones recomendadas
Tarea: arg.
Modifique la configuración o elimine la instrucción.
Error de IofGenInstr.
Consulte el mensaje anterior para conocer la causa.
40814, Error de ejecución
Ref. de programa arg.
Descripción
Tarea: arg.
StartMove no pudo obtener la distancia de recuperación.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
283
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Ref. de programa arg.
41004, Error interno de Itmsrc
Causas probables
Descripción
Error de aplicación.
Se ha producido un error interno con el origen de elementos
Acciones recomendadas
arg.
Reinicie la trayectoria.
Tipo de error: arg.
Recuperación: arg.
41005, Vacíe primero el origen de elementos
40815, Número de eje inexistente
Descripción
Debe vaciar el origen de elementos arg antes de utilizarlo.
Descripción
Tarea: arg.
Número de eje desconocido para la unidad mecánica arg.
Ref. de programa arg.
41006, Confirme primero el destino de elementos
Descripción
Acciones recomendadas
Es necesario confirmar el destino de elementos antes de volver
Compruebe el valor del argumento Axis.
a ejecutar la instrucción GetItmTgt(s).
Se ha producido un error con el origen de elementos arg.
40816, Error de RolGenInstr
41007, Búfer de destino de elementos lleno
Descripción
Tarea: arg.
Descripción
Error en la instrucción RolGenInstr.
El búfer de destino de elementos está lleno en el origen de
Consulte al usuario anterior o a un mensaje de error interno
elementos arg .
para conocer los motivos.
Ref. de programa arg.
41008, Error de inicialización de E/S de
transportador
Recuperación: arg.
41000, Origen de elementos ya existente
Descripción
Error de inicialización de la señal de E/S del origen de
Descripción
elementos arg del transportador arg. Nombre de señal de E/S
El origen de elementos arg ya existe. No pueden existir dos
arg.
orígenes de elementos con el mismo nombre.
41009, Transportador inexistente
41001, Nombre no válido
Descripción
Descripción
Error con el origen de elementos arg. El transportador arg no
Seleccione arg o arg.
existe.
41002, Tamaño de búfer excedido
41010, Ningún nombre asignado al transportador
Descripción
Descripción
Se ha producido un error interno no recuperable con el origen
Error con el origen de elementos arg. No se ha especificado
de elementos arg. En primer lugar, pruebe a reiniciar el
ningún nombre de transportador.
controlador o, en segundo lugar, pruebe a restablecer el
sistema. Informe de este error.
41011, Error de límites de transportador
41003, Origen de elementos no definido
Descripción
Descripción
Error con el origen de elementos arg, transportador arg. Los
límites no están definidos correctamente.
El objeto de origen de elementos no ha sido definido.
Continúa en la página siguiente
284
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41012, Datos de transportador definidos
demasiado tarde
41100, Demasiadas correcciones
Descripción
Tarea: arg.
Error con el origen de elementos arg, transportador arg. Es
Sólo se permite la conexión de un máximo de 5 descriptores
necesario llamar a la instrucción ItmSrcCnvDat antes de llamar
de corrección.
a la instrucción ItmSrcFlush.
Ref. de programa arg.
Descripción
Acciones recomendadas
41050, Perfil no activado
Compruebe el número de descriptores conectados.
Descripción
Recuperación: arg.
Grabación de perfil no preparada.
41101, Corrección no conectada
Consecuencias
Datos de perfil no activados.
Descripción
Tarea: arg.
Causas probables
Intento de activación de perfil grabado demasiado pronto.
Imposible escribir en el descriptor de corrección.
Ref. de programa arg.
Acciones recomendadas
Debe llamar a la instrucción RecordProfile antes de ejecutar
Acciones recomendadas
Compruebe que el descriptor de corrección actual esté
ActivateProfile.
conectado.
41051, Perfil grabado no almacenado
Recuperación: arg.
Descripción
41102, Ninguna corrección conectada
No hay ningún dato de perfil válido a almacenar.
Descripción
Consecuencias
Tarea: arg.
No se ha almacendao nada.
Imposible leer la corrección.
Causas probables
Ref. de programa arg.
Se ha intentado almacenar un perfil grabado que no existe o
no está activado.
Causas probables
Ningún descriptor de corrección conectado.
Acciones recomendadas
Acciones recomendadas
Debe llamar a la instrucción ActivateProfile antes de ejecutar
StoreProfile.
Compruebe si tiene conectado un generador de corrección.
Recuperación: arg.
41052, Imposible utilizar este archivo de datos
de perfil
41200, Error de apertura de herramienta de servo
Descripción
Descripción
Tarea: arg.
Archivo no encontrado o datos no válidos.
Consecuencias
Imposible abrir una pistola servo en el estado Motores OFF.
Ref. de programa arg.
Perfil no usado.
Acciones recomendadas
Causas probables
Inténtelo de nuevo después de cambiar a motores ON.
Archivo no encontrado o datos no válidos.
Recuperación: arg.
Acciones recomendadas
Compruebe el directorio de archivos y el nombre y los datos
41201, Error de cierre de herramienta de servo
del perfil.
Descripción
Tarea: arg.
Imposible cerrar una pistola servo en el estado Motores OFF.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
285
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
41206, Error de parámetro de herramienta de
servo
Inténtelo de nuevo después de cambiar a motores ON.
Descripción
Recuperación: arg.
Tarea: arg.
Ref. de programa arg.
El parámetro PrePos debe ser un valor positivo.
41202, Error de calibración de herramienta de
servo
Ref. de programa arg.
Descripción
Cambie el valor del parámetro.
Tarea: arg.
Recuperación: arg.
Acciones recomendadas
Imposible calibrar una pistola servo en el estado Motores OFF.
Acciones recomendadas
41207, Error de inicialización de herramienta de
servo
Inténtelo de nuevo después de cambiar a motores ON.
Descripción
Recuperación: arg.
Tarea: arg.
Ref. de programa arg.
La posición de la herramienta de servo arg no está inicializada.
41203, Error de herramienta de servo
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
Cambie el valor del parámetro o realice una calibración de
La herramienta de servo arg no existe.
cambio de punta.
Ref. de programa arg.
Recuperación: arg.
Acciones recomendadas
Compruebe el nombre de la unidad mecánica.
Recuperación:arg.
41208, Error de sincronización de herramienta
de servo
Descripción
41204, Error de herramienta de servo
Tarea: arg.
Las puntas de la herramienta de servo arg no están
Descripción
sincronizadas.
Tarea: arg.
Paro de emergencia al ejecutar la instrucción en una tarea en
Ref. de programa arg.
segundo plano.
Acciones recomendadas
Ref. de programa arg.
Realice la sincronización con ManServiceCalib o realice una
calibración de cambio de herramienta.
Acciones recomendadas
Vuelva a intentarlo después de restablecer el paro de
Recuperación: arg.
emergencia.
Recuperación:arg.
41209, Error de activación de herramienta de
servo
41205, Error de herramienta de servo
Descripción
Tarea: arg.
Descripción
La herramienta de servo arg no está activada.
Tarea: arg.
Imposible cerrar la pistola servo. La pistola no está abierta.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Utilice ActUnit para activarla.
Acciones recomendadas
Vuelva a intentarlo después de abrir la pistola.
Recuperación: arg.
Recuperación: arg.
Continúa en la página siguiente
286
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41210, Error de herramienta de servo
41303, Error de argumento
Descripción
Descripción
Tarea: arg.
El argumento Robot debe estar entre 1 y arg.
No es posible ejecutar la instrucción en Motores OFF para la
herramienta de servo arg.
Acciones recomendadas
Compruebe y cambie el valor.
Ref. de programa arg.
41304, Error de argumento
Acciones recomendadas
Inténtelo de nuevo después de cambiar a motores ON.
Recuperación: arg.
Descripción
El argumento Level no se corresponde con ningún nivel de
41211, Error de herramienta de servo
servicio.
41400, Error de parámetro
Descripción
Tarea: arg.
No es posible realizar una recalibración de la herramienta arg.
Ref. de programa arg.
Descripción
Tarea: arg.
AxisNo incorrecto.
Acciones recomendadas
Ref. de programa arg.
Vuelva a intentarlo después de comprobar los valores.
Recuperación: arg.
Acciones recomendadas
Compruebe y cambie el valor.
41212, Error de herramienta de servo
Presione Iniciar para continuar.
41401, Error de E/S
Descripción
Tarea: arg.
Imposible cambiar la fuerza. La pinza no está cerrada.
Ref. de programa arg.
Descripción
Imposible utilizar la señal de E/S.
Señal y dispositivo de E/S desconocidos.
Acciones recomendadas
Vuelva a intentarlo después de cerrar la pinza.
Recuperación: arg.
Causas probables
La conexión con el módulo de E/S se ha interrumpido.
Acciones recomendadas
41300, Error de argumento
Restablezca la conexión con el dispositivo de E/S.
Descripción
41404, Error de parámetro
El argumento Joint debe estar entre 1 y arg.
Descripción
Acciones recomendadas
Tarea: arg.
Compruebe y cambie el valor.
Falta el argumento On u Off.
Ref. de programa arg.
41301, Error de argumento
Acciones recomendadas
Descripción
Compruebe el programa de RAPID. Debe utilizar el modificador
El argumento Type no se corresponde con ningún valor de
On u Off.
servicio.
41405, Error de parámetro
41302, Error de argumento
Descripción
Descripción
Tarea: arg.
El argumento Type no se corresponde con ningún valor de
servicio.
Argumento arg no permitido junto con el argumento Off.
Ref. de programa: arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
287
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41411, Error de parámetro
Acciones recomendadas
Compruebe y modifique el programa de RAPID.
Descripción
Tarea: arg.
41406, Error de parámetro
Nombre de módulo desconocido arg.
Descripción
Ref. de programa arg.
Tarea: arg.
Causas probables
Este valor de TuneType sólo es válido con la opción Advanced
El módulo no existe.
Shape Tuning.
Acciones recomendadas
Ref. de programa arg.
Compruebe y modifique el programa de RAPID.
Acciones recomendadas
Cambie el valor de TuneType o instale la opción.
41412, Error de parámetro
41407, Error de parámetro
Descripción
Tarea: arg.
Descripción
Módulo arg ambiguo.
Tarea: arg.
Ref. de programa arg.
El símbolo arg es de sólo lectura.
Acciones recomendadas
Ref. de programa arg.
Compruebe y modifique el programa de RAPID.
Acciones recomendadas
Recuperación: arg.
41413, Error de parámetro
41408, Error de parámetro
Descripción
Tarea: arg.
Descripción
Nombre de rutina ambiguo arg.
Tarea: arg.
Ref. de programa arg.
Imposible encontrar el símbolo arg.
Acciones recomendadas
Ref. de programa arg.
Compruebe y modifique el programa de RAPID.
Acciones recomendadas
Recuperación: arg.
41414, Error de parámetro
41409, Error de parámetro
Descripción
Tarea: arg.
Descripción
Nombre de rutina desconocido arg.
Tarea: arg.
Ref. de programa arg.
Símbolo arg ambiguo.
Causas probables
Ref. de programa arg.
La rutina no existe.
Acciones recomendadas
Compruebe y modifique el programa de RAPID.
Acciones recomendadas
Compruebe y modifique el programa de RAPID.
41410, Error de parámetro
41415, Error de parámetro
Descripción
Descripción
Tarea: arg.
Error de búsqueda con el símbolo arg.
Tarea: arg.
El nombre de módulo arg no existe.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Recuperación: arg.
Compruebe y modifique el programa de RAPID.
Continúa en la página siguiente
288
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41422, Error de parámetro
Recuperación: arg.
Descripción
41416, Error de parámetro
Tarea: arg.
Descripción
Tipo cfg desconocido en el argumento arg.
Tarea: arg.
Ref. de programa arg.
El símbolo arg no es un módulo.
Acciones recomendadas
Ref. de programa arg.
Compruebe y modifique el programa de RAPID.
Acciones recomendadas
Recuperación: arg.
Compruebe y modifique el programa de RAPID.
41423, Error de parámetro
Recuperación: arg.
41417, Error de acceso a cámara
Descripción
Tarea: arg.
Descripción
Instancia cfg desconocida en el argumento arg.
Tarea: arg.
Ref. de programa arg.
Imposible convertir la fecha.
Acciones recomendadas
Ref. de programa arg.
Compruebe y modifique el programa de RAPID.
Acciones recomendadas
Recuperación: arg.
Reinicie el controlador e inténtelo de nuevo.
41424, Error de parámetro
41419, Error de parámetro
Descripción
Descripción
Tarea: arg.
Tarea: arg.
Atributo cfg desconocido en el argumento arg.
arg debe ser del tipo num, bool, string o dnum.
Ref. de programa arg.
Ref. de programa: arg.
Acciones recomendadas
Acciones recomendadas
Compruebe y modifique el programa de RAPID.
Compruebe y modifique el programa de RAPID.
Recuperación: arg.
41420, Error de parámetro
41425, Error de parámetro
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El tipo de argumento de arg no es compatible con el tipo cfg.
La trayectoria 'arg' del argumento arg es incorrecta.
Se esperaba arg.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Compruebe y cambie la ruta.
Recuperación: arg.
Recuperación: arg.
41421, Error de parámetro
41426, Error de E/S
Descripción
Descripción
Tarea: arg.
Imposible utilizar la señal de E/S. Señal y dispositivo de E/S
Dominio cfg desconocido en el argumento arg.
desconocidos.
Ref. de programa arg.
Consecuencias
Acciones recomendadas
Imposible reiniciar.
Compruebe y modifique el programa de RAPID.
Recuperación: arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
289
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41433, Error de parámetro
Causas probables
La conexión con el módulo de E/S se ha interrumpido.
Descripción
Acciones recomendadas
Tarea: arg.
Restablezca la conexión con el dispositivo de E/S. Para permitir
Unidad mecánica desconocida.
el reinicio del programa, sitúe el PP en una posición de reinicio
Ref. de programa arg.
seguro.
Acciones recomendadas
Compruebe si la unidad mecánica existe en el sistema.
41427, Error de argumento
Recuperación: arg.
Descripción
41434, Error de parámetro
Tarea arg :
El tiempo de retardo debe ser positivo.
Ref. de programa arg.
Descripción
Tarea: arg.
Acciones recomendadas
Argumento Axis fuera de rango.
Cambie el valor del tiempo de retardo.
Ref. de programa arg.
Acciones recomendadas
41428, Error de eje
Compruebe y cambie el valor del argumento Axis.
Descripción
Recuperación: arg.
Tarea: arg.
El eje único no está inicializado correctamente. El sensor no
está activado.
41435, Error de parámetro
Descripción
Ref. de programa arg.
Tarea: arg.
Argumento Channel fuera de rango.
41429, Error de eje
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
Compruebe y cambie el valor del argumento Channel.
El eje único no está inicializado correctamente.
El proceso de sensor no está inicializado correctamente.
41437, Error de acceso a cámara
Ref. de programa arg.
Descripción
41431, Error de acceso a cámara
Tarea: arg.
Imposible restablecer todas las señales de prueba.
Descripción
Ref. de programa arg.
Tarea: arg.
Acciones recomendadas
Instancia de LOGSRV desconocida.
Reinicie el controlador e inténtelo de nuevo.
Ref. de programa arg.
Acciones recomendadas
41438, Carga no definida
Reinicie el controlador e inténtelo de nuevo.
Descripción
41432, Error de acceso a cámara
Tarea: arg.
¡AVISO!
Descripción
El argumento arg tiene una carga no definida (masa=0).
Tarea: arg.
Ref. de programa arg.
Imposible establecer señales de prueba.
Consecuencias
Ref. de programa arg.
ES IMPORTANTE DEFINIR LA CARGA CORRECTA para evitar
Acciones recomendadas
que se produzcan daños mecánicos en el robot.
Reinicie el controlador e inténtelo de nuevo.
Continúa en la página siguiente
290
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
Si hay una instrucción CONNECT a una rutina TRAP en el
Defina la carga real de la herramienta o la carga de la pinza
módulo, es necesario ejecutar una instrucción IDelete con la
antes de iniciar movimientos de programa o manuales. Para
rutina TRAP antes de poder descargar el módulo.
conseguir un buen rendimiento de movimientos, se requiere
una carga definida correctamente.
Acciones recomendadas
Compruebe que el módulo no contenga rutinas o datos que
estén aún activos, por ejemplo CONNECT.
41439, Carga no definida
Recuperación: arg.
Descripción
41442, Error de referencia
Tarea: arg.
¡AVISO!
Descripción
El argumento arg tiene un centro de gravedad de cargas no
definido.
Tarea: arg.
La referencia del argumento arg no es una variable persistente
Ref. de programa arg.
completa.
Consecuencias
Ref. de programa arg.
ES IMPORTANTE DEFINIR LA CARGA CORRECTA para evitar
que se produzcan daños mecánicos en el robot.
Acciones recomendadas
No es posible usar el componente de registro o el elemento de
Acciones recomendadas
matriz en el argumento arg .
Defina el centro de gravedad real de la carga de la herramienta
Sólo es posible utilizar variables persistentes completas en
o de la carga de la pinza antes de realizar movimientos de
Tool, WObj o Load en las instrucciones de movimiento.
programa o manuales (cog.x, cog.y y cog.z no pueden ser 0
mm a la vez). La identificación de la carga puede hacerse con
la rutina de servicio LoadIdentify.
41443, Error de argumento
Descripción
Tarea: arg.
41440, Falta un argumento
El argumento Tool tiene una carga negativa para la herramienta.
Descripción
Ref. de programa arg.
Tarea: arg.
Acciones recomendadas
Es necesario definir un parámetro de modificador.
Ref. de programa arg.
Defina la carga correcta de la herramienta antes de usar la
herramienta para desplazamientos o movimientos del programa.
Consecuencias
La identificación de la carga de la herramienta puede hacerse
La rutina de RAPID a la que ha llamado no pudo ejecutarse.
con la rutina de servicio LoadIdentify.
Acciones recomendadas
Es necesario especificar un argumento con el tipo de datos
41444, Error de argumento
'switch'.
Descripción
Tarea: arg.
41441, Error de descarga
El argumento Tool contiene al menos un componente de datos
de inercia con un valor negativo.
Descripción
Ref. de programa arg.
Tarea: arg.
El módulo cargado con la ruta arg está activo y por tanto no
Acciones recomendadas
puede eliminarlo.
Defina todos los componentes de datos de inercia (ix, iy o iz)
Ref. de programa arg.
como valores positivos reales.
Causas probables
La instrucción UnLoad o WaitLoad se ejecuta en el mismo
41445, Error de argumento
módulo que el módulo que debe eliminarse.
Descripción
La instrucción UnLoad o WaitLoad se encuentra en una rutina
Tarea: arg.
TRAP que se ejecuta antes de lo esperado.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
291
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
No hay ningún \WObj especificado para el movimiento con un
TCP estacionario.
41449, Error de valor
Descripción
Ref. de programa arg.
Tarea: arg.
Acciones recomendadas
Valor no válido en el argumento arg.
Añada el argumento \WObj al objeto de trabajo real.
Ref. de programa arg.
Si no hay ningún movimiento con el TCP estacionario, cambie
el componente "robhold" del argumento Tool a TRUE (el robot
sostiene la herramienta).
Acciones recomendadas
Compruebe el programa de RAPID.
41450, Error de argumento
41446, Error de argumento
Descripción
Descripción
Tarea: arg.
Tarea: arg.
No se ha definido si el robot sostiene la herramienta o el objeto
de trabajo.
El argumento \WObj especifica un nombre de unidad mecánica
que no está activado o que no se conoce en el sistema.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Consecuencias
La ejecución del programa se detendrá inmediatamente.
Causas probables
El nombre de unidad mecánica definido en \WObj debe
corresponder a un nombre definido anteriormente en los
parámetros del sistema y debe estar activado.
Discrepancia entre el componente robhold de la herramienta
y el objeto de trabajo.
41451, Error de argumento
Acciones recomendadas
Descripción
Compruebe si hay algún error de coincidencia entre el
argumento Tool y el argumento \WObj del componente de dato
robhold.
Tarea: arg.
El argumento arg contiene un número de interrupción no válido.
Ref. de programa arg.
Causas probables
41447, Error de argumento
El número de interrupción de entrada no es válido porque no
Descripción
ha sido asignado mediante una instrucción CONNECT.
Tarea: arg.
El argumento arg contiene al menos un componente de datos
con un valor negativo.
Acciones recomendadas
Utilice la instrucción CONNECT para asignar y conectar un
número de interrupción a una rutina TRAP.
Ref. de programa arg.
Acciones recomendadas
41452, Error de argumento
Cambie todos los componentes de datos del argumento arg a
Descripción
valores positivos.
Tarea: arg.
El argumento arg contiene un número de interrupción que ya
41448, Error de argumento
se está utilizando para otros fines.
Descripción
Ref. de programa arg.
Tarea: arg.
El argumento arg no debe tener un valor negativo.
Ref. de programa arg.
Acciones recomendadas
Antes de reutilizar una variable de interrupción en el programa,
es necesario cancelarla con la instrucción IDelete.
Acciones recomendadas
Cambie el valor del argumento arg a un valor positivo.
41453, Error de tipo
Descripción
Tarea: arg.
Continúa en la página siguiente
292
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Tipo de dato no válido en un argumento arg.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Compruebe y cambie el valor del argumento.
Compruebe el programa de RAPID.
41459, Error de argumento
41454, Error de referencia
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El argumento arg está fuera de rango.
El número de parámetro de disparo arg hace referencia a un
Ref. de programa arg.
dato de disparo no definido.
Acciones recomendadas
Ref. de programa arg.
Compruebe y cambie el valor del argumento.
Acciones recomendadas
Defina el dato de disparo ejecutando la instrucción TriggIO,
TriggInt, TriggEquip, TriggSpeed o TriggCheckIO antes de la
instrucción actual.
41460, Error de argumento
Descripción
Tarea: arg.
41455, Error de acceso a cámara
Descripción
El argumento arg, arg o arg está fuera de rango.
Ref. de programa arg.
Acciones recomendadas
Tarea: arg.
Compruebe y cambie el argumento.
Fallo al obtener la hora del sistema operativo.
Ref. de programa arg.
41461, Error de valor
Acciones recomendadas
Reinicie el controlador e inténtelo de nuevo.
Descripción
Tarea: arg.
Valor no válido en el argumento arg.
41456, Error de argumento
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
El índice debe ser un entero del rango 1 - 1.024.
El argumento arg está fuera de rango.
Ref. de programa arg.
41462, Error de valor
Acciones recomendadas
Descripción
El valor debe estar en el rango arg.
Tarea: arg.
Valor no válido en un argumento del parámetro arg.
41457, Error de argumento
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
El valor debe ser un entero y estar dentro del rango correcto.
Falta un argumento opcional.
Ref. de programa arg.
41463, Falta un argumento de modificador
Acciones recomendadas
Añada uno de los argumentos opcionales arg o arg.
Descripción
Tarea: arg.
Falta un argumento.
41458, Error de argumento
Ref. de programa arg.
Descripción
Tarea: arg.
El argumento arg o arg está fuera de rango.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
293
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
Acciones recomendadas
Debe definir al menos uno de los parámetros de
Compruebe y cambie el valor. NoOfBytes debe ser un entero
modificador\Hex1, \Long4, \Float4 o \ASCII.
y estar en el rango 1 - 1.024. No debe ser mayor que la longitud
de RawData.
41464, Índice demasiado alto
41469, Error de valor
Descripción
Tarea: arg.
Descripción
Valor no válido en el argumento arg.
Tarea: arg.
Ref. de programa arg.
Valor no válido en el argumento arg.
Ref. de programa arg.
Acciones recomendadas
Compruebe el programa de RAPID.
Acciones recomendadas
Compruebe el valor. NoOfBytes no debe ser mayor que la
41465, Cadena vacía
longitud de RawData.
Descripción
41470, Error de argumento
Tarea: arg.
Valor no válido en el argumento arg.
Descripción
Ref. de programa arg.
Tarea: arg.
El argumento arg o arg está fuera de rango.
Acciones recomendadas
Compruebe el argumento y utilice una cadena no vacía.
Ref. de programa arg.
Acciones recomendadas
41466, Dos variables iguales
Compruebe y cambie el valor del argumento.
Descripción
41471, Error de instrucción
Tarea: arg.
Los argumentos FromRawData y ToRawData son iguales.
Descripción
Ref. de programa arg.
Tarea: arg.
No se le permite desactivar el dispositivo de E/S arg.
Acciones recomendadas
Compruebe y modifique el programa de RAPID.
Ref. de programa arg.
Acciones recomendadas
41467, Error de valor
Recuperación: arg.
Descripción
41472, Error de instrucción
Tarea: arg.
Valor no válido en el argumento arg.
Descripción
Ref. de programa arg.
Tarea: arg.
No hay ningún cliente, por ejemplo un FlexPendant, a cargo
Acciones recomendadas
Compruebe y cambie el valor. Debe ser un entero y estar en
de las instrucciones.
Ref. de programa arg.
el rango 0 - 255.
Acciones recomendadas
41468, Error de valor
Recuperación: arg.
Descripción
41473, Error de acceso al sistema
Tarea: arg.
Valor no válido en el argumento arg.
Descripción
Ref. de programa arg.
No se pudieron enviar datos mediante SCWrite a un ordenador
externo.
Imposible enviar la variable arg.
Continúa en la página siguiente
294
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41474, Error de valor
Consecuencias
La cadena se ha llenado con datos, pero solo la cantidad válida.
Descripción
Tarea: arg.
Causas probables
Valor no válido en el argumento arg.
El valor utilizado en el argumento opcional arg es demasiado
Ref. de programa arg.
alto.
Acciones recomendadas
Acciones recomendadas
Compruebe el valor: arg arg debe ser un entero positivo.
Compruebe el programa de RAPID.
Utilice la función arg para obtener la longitud actual de los bytes
41475, Tamaño incorrecto de lista de tareas
válidos de una variable de tipo rawbytes.
Descripción
41483, Error de argumento
Tarea: arg.
La lista de tareas tiene un número incorrecto de elementos. No
Descripción
debe tener menos de 1 ni más de arg.
Tarea: arg.
Ref. de programa arg.
El valor de la ID es negativo o no es un entero.
Ref. de programa arg.
Acciones recomendadas
Compruebe y cambie el número de argumentos de la lista de
Acciones recomendadas
tareas.
Compruebe el valor de la ID de argumento opcional. El valor
debe ser un entero no negativo.
41476, Lista de tareas incoherente
41484, Tiempo límite agotado
Descripción
Tarea: arg.
Descripción
arg en la lista de tareas no es una de las tareas configuradas
Tarea: arg.
en el sistema (puede configurar un máximo de arg tareas).
El tiempo establecido en el argumento arg de la instrucción
Ref. de programa arg.
SyncMoveOn ha caducado.
Ref. de programa arg.
Acciones recomendadas
Añada la tarea al sistema (en la configuración del controlador)
Acciones recomendadas
o elimínela de la lista de tareas.
Recuperación: arg.
41477, Tiempo límite agotado
41486, Error de instrucción
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El tiempo establecido en el argumento arg de la instrucción
La instrucción arg sólo está disponible si hay un TCP de robot
WaitSyncTask ha caducado.
definido en la tarea de programa.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Recuperación: arg.
Compruebe la configuración. Debe eliminar la instrucción si no
se supone que la tarea deba tener un TCP de robot.
41480, Error UnpackRawBytes
41487, Error de instrucción
Descripción
Tarea: arg.
Descripción
El número de bytes a desempaquetar es demasiado alto y se
Tarea: arg.
ha reducido.
La instrucción arg sólo funciona si el TCP de robot está activo.
Longitud: arg.
Ref. de programa arg.
Ref. de programa arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
295
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
La instrucción arg sólo funciona si la unidad mecánica está
Active el TCP de robot en la tarea.
activa.
Ref. de programa arg.
41488, Error de valor
Acciones recomendadas
Descripción
Active la unidad mecánica en la tarea.
Tarea: arg.
No hay ningún TCP de robot definido en la tarea de programa.
El valor introducido para uno o varios ejes del robot no es igual
a 9E9.
41493, Error de ejecución
Descripción
Tarea: arg.
Ref. de programa arg.
No hay ningún TCP de robot disponible en la tarea.
Acciones recomendadas
Ref. de programa arg.
Cambie el valor del eje de robot a 9E9.
Acciones recomendadas
Para poder ejecutar la instrucción, debe disponer de un TCP
41489, Error de valor
de robot en la tarea.
Descripción
41494, Error de instrucción
Tarea: arg.
El eje de robot arg no es móvil y por tanto no puede ser
supervisado.
Descripción
Tarea: arg.
Ref. de programa arg.
La tarea no controla la unidad mecánica: arg.
Acciones recomendadas
Ref. de programa arg.
Cambie el valor del eje arg a 9E9.
Acciones recomendadas
Compruebe la configuración.
41490, Tiempo límite agotado
41495, Error al mover el PP
Descripción
Tarea: arg.
Descripción
El tiempo establecido en el argumento arg de la instrucción
SyncMoveOff ha caducado.
Tarea: arg.
El cambio del modo independiente al modo sincronizado no
Ref. de programa arg.
se ha completado aún.
Acciones recomendadas
Ref. de programa arg.
Recuperación: arg.
Consecuencias
El reinicio de la instrucción actual está bloqueado.
41491, Error de instrucción
El sistema puede encontrarse en el modo de movimiento
Descripción
sincronizado o aún en el modo de movimiento independiente.
Tarea: arg.
Causas probables
La instrucción arg no está disponible si hay un TCP de robot
Detención del programa mientras había una instrucción activa.
definido en la tarea de programa.
A continuación, se ha realizado un movimiento de PP dentro
Ref. de programa arg.
del programa.
Acciones recomendadas
Acciones recomendadas
Compruebe la configuración. Debe eliminar la instrucción si se
Devuelva el PP al inicio del programa. El puntero de programa
supone que la tarea debe tener un TCP de robot.
debe moverse en todas las tareas de programa. Para tener un
estado del sistema bien definido, debe mover el PP a Main.
41492, Error de instrucción
Descripción
Tarea: arg.
Continúa en la página siguiente
296
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41496, Error al mover el PP
41499, Modo sincronizado
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El cambio del modo sincronizado al modo independiente no
El sistema se encuentra en el modo sincronizado. La instrucción
se ha completado aún.
debe tener una ID.
Ref. de programa arg.
Ref. de programa arg.
Consecuencias
Acciones recomendadas
El reinicio de la instrucción actual está bloqueado.
Añada a la instrucción el modificador \ID con un número de
El sistema puede encontrarse en el modo de movimiento
identificación.
sincronizado o aún en el modo de movimiento independiente.
Causas probables
41500, Modo independiente
Detención del programa mientras había una instrucción activa.
Descripción
A continuación, se ha realizado un movimiento de PP dentro
Tarea: arg.
del programa.
El sistema se encuentra en el modo independiente. La
Acciones recomendadas
instrucción no debe tener una ID.
Devuelva el PP al inicio del programa. El puntero de programa
Ref. de programa arg.
debe moverse en todas las tareas de programa. Para tener un
Acciones recomendadas
estado del sistema bien definido, debe mover el PP a Main.
Elimine el modificador \ID de la instrucción.
41497, Notificación de movimiento de PP
41501, ID no válida
Descripción
Descripción
Tarea: arg.
Tarea: arg.
La instrucción arg estaba activa en esta tarea. El movimiento
ErrorId tiene un valor no válido. Debe ser un entero en el
del PP dentro del programa puede resultar peligroso en algunos
intervalo arg - arg.
casos.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Consecuencias
Cambie el valor.
El movimiento del PP en el programa de RAPID puede dar lugar
a tareas de RAPID no sincronizadas y/o colisiones entre robots.
Causas probables
41502, Dominio no válido
Descripción
Movimiento del PP dentro del programa de RAPID cuando se
tiene la instrucción arg activa.
Tarea: arg.
El dominio arg no puede usarse.
Acciones recomendadas
Ref. de programa arg.
Mueva el PP a una posición adecuada en esta tarea de
programa.
Acciones recomendadas
Seleccione otro dominio de registro de errores.
41498, ¡Sin base coord. definida un. mec. arg!
Descripción
41503, Tipo de error no válido
Descripción
El objeto de trabajo arg contiene una unidad mecánica
coordinada que no tiene definida ninguna base de coordenadas
de usuario.
Tarea: arg.
No puede utilizar el tipo de error TYPE_ALL.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Compruebe el componente de unidad mecánica del objeto de
Utilice otro tipo de error.
trabajo.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
297
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41504, No ha indicado ninguna unidad mecánica
Acciones recomendadas
Consulte el siguiente mensaje del registro de eventos para
Descripción
saber qué acción de usuario siguiente debe realizar.
Tarea: arg.
No hay ningún TCP en el sistema y no se ha añadido ninguna
unidad mecánica a la instrucción.
41509, Error de LoadId
Descripción
Ref. de programa arg.
Tarea: arg.
Acciones recomendadas
Añada a la instrucción una unidad mecánica que exista en la
No hay ninguna posición válida de identificación de carga.
Ref. de programa arg.
tarea.
Acciones recomendadas
41505, Unidad mecánica no incluida en la tarea
Cambie la posición del robot.
Consulte el siguiente mensaje del registro de eventos para
Descripción
saber qué acción de usuario siguiente debe realizar.
Tarea: arg.
La unidad mecánica indicada no existe en la tarea.
Ref. de programa arg.
41510, Error de LoadId
Descripción
Acciones recomendadas
Añada otra unidad mecánica a la instrucción.
Tarea: arg.
No se permite identificar (ni utilizar) tool0.
41506, La tarea no lee un TCP de robot
Ref. de programa arg.
Acciones recomendadas
Descripción
Cambia a activa en la ventana de movimiento la herramienta
Tarea: arg.
La tarea de lectura no puede leer un TCP de robot.
Ref. de programa arg.
que debe identificarse.
Consulte el siguiente mensaje del registro de eventos para
saber qué acción de usuario siguiente debe realizar.
Acciones recomendadas
Modifique la configuración o añada a la instrucción una unidad
41511, Error de LoadId
mecánica que exista en la tarea.
Descripción
41507, La tarea lee otra unidad mecánica
Tarea: arg.
No se permite identificar load0.
Descripción
Ref. de programa arg.
Tarea: arg.
La tarea lee una unidad mecánica distinta de la indicada en la
instrucción.
Acciones recomendadas
Utilice otra carga para la identificación.
Consulte el siguiente mensaje del registro de eventos para
Ref. de programa arg.
saber qué acción de usuario siguiente debe realizar.
Acciones recomendadas
Cambie la unidad mecánica en la instrucción.
41512, Error interno
41508, Error de LoadId
Descripción
Tarea: arg.
Descripción
Hay > 2 ejes de medición a la vez.
Tarea: arg.
Ref. de programa arg.
La identificación de carga no está disponible para este tipo de
robot.
Acciones recomendadas
Consulte el siguiente mensaje del registro de eventos para
Ref. de programa arg.
saber qué acción de usuario siguiente debe realizar.
Continúa en la página siguiente
298
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41513, Error de LoadId
41517, Error de LoadId
Descripción
Descripción
Tarea: arg.
Tarea: arg.
Selección de carga útil fuera de límites.
Se ha movido el puntero de programa hasta el principio de la
Ref. de programa arg.
rutina de identificación de cargas y ahora está preparado para
un nuevo reinicio.
Acciones recomendadas
Seleccione una carga útil del sistema.
Presione Iniciar para continuar.
Ref. de programa arg.
Causas probables
La rutina de servicio fue detenida durante la medición,
41514, Error de LoadId
interrumpida con una cancelación por parte del usuario, o bien
interrumpida por otro tipo de error.
Descripción
Compruebe el mensaje anterior del registro de errores para
Tarea: arg.
wobj0 no puede estar activado para un TCP fijo.
conocer los motivos.
Acciones recomendadas
Ref. de programa arg.
Inicie de nuevo la rutina de servicio. Utilice Depurar - Cancelar
Acciones recomendadas
llamada a rutina para cerrar la ejecución de la rutina de servicio.
Seleccione otro objeto de trabajo.
Consulte el siguiente mensaje del registro de eventos para
saber qué acción de usuario siguiente debe realizar.
NOTA: El comando Cancelar llamada a rutina provocará la
pérdida del puntero de programa.
Utilice Depurar - Mover PP a Main para obtener un nuevo
puntero de programa.
41515, Error de LoadId
41518, Error de LoadId
Descripción
Tarea: arg.
Selección de método fuera de límites.
Ref. de programa arg.
Descripción
Tarea: arg.
Selección de unidad mecánica fuera de límites.
Acciones recomendadas
Ref. de programa arg.
Seleccione uno de los métodos de identificación indicados.
Presione Iniciar para continuar.
Acciones recomendadas
Seleccione una de las unidades mecánicas mostradas.
Presione Iniciar para continuar.
41516, Error de LoadId
41519, Error de LoadId
Descripción
Tarea: arg.
El ángulo de configuración no es adecuado.
Ref. de programa arg.
Descripción
Tarea: arg.
La masa debe ser > 0 kg.
Consecuencias
Ref. de programa arg.
Imposible ejecutar la identificación.
Acciones recomendadas
Causas probables
Especifique una masa mayor que 0.
El valor seleccionado para el ángulo de configuración es de
Presione Iniciar para continuar.
menos de 30 o tiene un valor diferente que no puede usarse
en la identificación.
41520, Constante de recuperación de errores no
registrada
Acciones recomendadas
Seleccione un ángulo de configuración entre +/- 30 y +/- 90
grados.
Descripción
Tarea: arg.
Presione Iniciar para continuar.
La constante de recuperación de errores arg no está registrada.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
299
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Utilice la instrucción BookErrNo para registrar la constante o
Elimine la instrucción.
utilice una constante de recuperación de errores de las
registradas por el sistema (no puede usarlas con ErrRaise).
41521, Error de estado de tarea
41525, Error de instrucción
Descripción
Tarea: arg.
Descripción
El programa está ejecutando una rutina EVENT. No se permite
Tarea: arg.
ejecutar la instrucción arg en una rutina EVENT.
Ninguna de las tareas de la lista de tareas es una tarea
Ref. de programa arg.
NORMAL y activada.
Acciones recomendadas
Ref. de programa arg.
Elimine la instrucción.
Acciones recomendadas
Consulte el panel de selección de tareas para comprobar que
al menos una de las tareas de la lista de tareas esté
seleccionada, es decir, activada.
Compruebe en el archivo .cfg que al menos una de las tareas
seleccionadas sea NORMAL.
41526, Error de instrucción
Descripción
Tarea: arg.
La instrucción arg sólo puede usarse en un gestor de
ERRORES.
41522, Se ha utilizado una constante de
recuperación de errores incorrecta
Ref. de programa arg.
Acciones recomendadas
Elimine la instrucción o trasládela a un gestor de ERRORES.
Descripción
Tarea: arg.
41527, Falta un argumento de modificador
La constante de recuperación de errores arg ha sido registrada
por el sistema. No puede utilizar la constante con la instrucción
Descripción
ErrRaise.
Tarea: arg.
Ref. de programa arg.
Falta un argumento.
Ref. de programa arg.
Acciones recomendadas
Registre una nueva constante de recuperación de errores con
Acciones recomendadas
la instrucción BookErrNo.
Debe definir al menos uno de los parámetros de modificador
\Continue o \BreakOff en arg.
41523, Error de argumento
41528, Error de instrucción
Descripción
Tarea: arg.
Descripción
El argumento arg no es un entero o es negativo.
Tarea: arg.
Ref. de programa arg.
La instrucción arg sólo puede usarse en rutinas NOSTEPIN.
Acciones recomendadas
Acciones recomendadas
Cambie el valor del argumento a un entero no negativo.
Elimine la instrucción o trasládela a una rutina NOSTEPIN.
41524, Error de instrucción
41529, Error de instrucción
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El programa está ejecutando un gestor UNDO. No se permite
El modificador \Inpos sólo se permite si la tarea tiene el control
ejecutar la instrucción arg en un gestor UNDO.
de una unidad mecánica.
Ref. de programa arg.
Continúa en la página siguiente
300
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
un nombre de tarea se usa varias veces. Una o varias tareas
Elimine el modificador \Inpos de la instrucción.
han sido activadas/desactivadas en el panel de selección de
tareas tras la ejecución de la primera instrucción.
41530, Error de instrucción
Acciones recomendadas
Descripción
Compruebe y modifique las listas de tareas y SyncIDs, o volverá
Tarea: arg.
a producirse el mismo error. Comience de nuevo. Las
No es posible ejecutar la instrucción arg mientras el objeto de
instrucciones se ejecutarán con el estado actual del panel de
trabajo coordinado contenga una referencia a la unidad
selección de tareas.
mecánica arg, que está situada en otra tarea.
Ref. de programa arg.
41533, Error de coincidencia de SyncID
Acciones recomendadas
Descripción
Cambie a un objeto de trabajo que haga referencia a una unidad
Tarea: arg.
mecánica situada en la misma tarea que el robot del TCP.
El valor de SyncID arg no coincide con el valor de SyncID en
La función CalcJointT puede usarse incluso si el objeto de
una o varias de las demás tareas.
trabajo coordinado está situado en otra tarea siempre y cuando:
Ref. de programa arg.
Se use el modificador \UseCurWObjPos. El objeto de trabajo
coordinado esté en reposo.
Causas probables
El uso de listas de tareas no globales puede dar lugar a este
error.
41531, Tarea no incluida en la lista de tareas
Acciones recomendadas
Descripción
Cambie el valor de SyncID y compruebe las listas de tareas.
Tarea: arg.
Debe mover el PP a Main en todas las tareas antes de
arg no es ninguna de las tareas de la lista de tareas o hay un
continuar.
error de coincidencia entre las listas de tareas de las distintas
tareas.
41534, Datos de sincronización incoherentes
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
Añada la tarea actual a la lista de tareas. Compruebe que las
listas de tareas de las distintas tareas sean parecidas. Al utilizar
Datos de sincronización incoherentes en la lista de tareas arg.
Ref. de programa arg.
variables PERS, puede ser necesario descargar los módulos
que contienen las listas de tareas y recargarlos de nuevo.
Acciones recomendadas
Cambie el contenido de la lista de tareas.
41532, Error de coincidencia de listas de tareas
Debe mover el PP a Main en todas las tareas antes de
continuar.
Descripción
Tarea: arg.
41535, Instrucción SyncMoveOn inesperada
Imposible sincronizar a causa de lo siguiente: La lista de tareas,
arg, no coincide con las listas de tareas que tienen la misma
SyncID en las otras tareas o un nombre de tarea se usa varias
veces en la lista de tareas. El panel de selección de tareas de
la primera instrucción ejecutada no contiene las mismas tareas
activas que las instrucciones siguientes. Ref. de programa arg.
Descripción
Tarea: arg.
SyncMoveOn inesperada (SyncID arg). El sistema ya se
encuentra en el modo sincronizado.
Ref. de programa arg.
Causas probables
Consecuencias
La ejecución del programa se detendrá inmediatamente.
La tarea de programa ya está en el modo sincronizado porque
ya se ha ejecutado SyncMoveOn.
Causas probables
El uso de listas de tareas que no sean globales puede dar lugar
El motivo de este error es uno de los siguientes: Las listas de
a este error.
tareas no tienen el mismo contenido para la misma SyncID o
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
301
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
Consecuencias
Debe mover el PP a Main en todas las tareas antes de continuar
La ejecución del programa se detendrá inmediatamente.
con la ejecución del programa.
Acciones recomendadas
Elimine la instrucción SyncMoveOn. Cada instrucción
Cambie la velocidad o el tipo de paro.
SyncMoveOn debe ir seguida de una instrucción SyncMoveOff.
Compruebe sus listas de tareas.
41540, Unidad mecánica incorrecta
41536, Instrucción SyncMoveOn inesperada
Descripción
Tarea: arg.
Descripción
La tarea lee la tarea de control arg que no controla a su vez a
Tarea: arg.
la unidad mecánica arg.
SyncMoveOn inesperado (SyncID arg). El sistema está
Ref. de programa arg.
esperando una instrucción SyncMoveOff.
Acciones recomendadas
Ref. de programa arg.
Cambie \MechUnit o la configuración.
Acciones recomendadas
Elimine la instrucción SyncMoveOn. Cada instrucción
41541, No permitido en una tarea de lectura
SyncMoveOn debe ir seguida de una instrucción SyncMoveOff.
Descripción
41537, Instrucción SyncMoveOff inesperada
Tarea: arg.
No se permite la ejecución de esta instrucción en una tarea de
Descripción
lectura.
Tarea: arg.
Ref. de programa arg.
SyncMoveOff inesperado (SyncID arg). El sistema está
esperando una instrucción SyncMoveOn.
Acciones recomendadas
Elimine la instrucción.
Ref. de programa arg.
Acciones recomendadas
41542, Paro de programa
Elimine la instrucción SyncMoveOff. Cada instrucción
SyncMoveOn debe ir seguida de una instrucción SyncMoveOff.
Descripción
Tarea: arg.
41538, Lista de tareas incorrecta
No es posible recuperar una trayectoria a causa de un paro de
programa en el sistema.
Descripción
Ref. de programa arg.
Tarea: arg.
La tarea arg de la lista de tareas es una tarea de lectura y no
Acciones recomendadas
Recuperación: arg.
puede ser sincronizada.
Ref. de programa arg.
41543, Error de argumento
Acciones recomendadas
Cambie la lista de tareas o la configuración.
Descripción
Tarea: arg.
41539, Velocidad demasiado alta
Se han definido datos de carga, pero éstos ya no están
disponibles en el sistema.
Descripción
Ref. de programa arg.
Tarea: arg.
La velocidad es superior a los arg mm/s. Se trata de una
velocidad excesiva si se utiliza el paro rígido (modificador
Causas probables
El motivo de este error es uno de los siguientes: Es posible
que la instrucción GripLoad haya sido ejecutada en un módulo
\Stop).
que ya no está disponible en el sistema. Es posible que se haya
Ref. de programa arg.
ejecutado una instrucción de movimiento con un argumento
Continúa en la página siguiente
302
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
opcional Tload en un módulo que ya no está disponible en el
sistema.
41548, Error de módulo
Descripción
Acciones recomendadas
Tarea: arg.
Asegúrese de ejecutar GripLoad load0 para resetear los datos
El módulo que está intentando borrar, arg, está activo y por
de carga.
tanto no puede eliminarlo.
Si utiliza el argumento opcional Tload en las instrucciones de
Ref. de programa arg.
movimiento, ejecute SetSysData load0 para resetear los datos
de carga.
Acciones recomendadas
Compruebe que el módulo que desee borrar no esté activo.
41544, Instrucción obsoleta
41549, SyncMoveOn o SyncMoveOff inesperada
Descripción
Descripción
Tarea: arg.
El procedimiento arg está obsoleto. Funcionará de momento,
pero es posible que sea eliminado en una versión posterior.
Utilice en su lugar arg, que le ofrece la misma funcionalidad.
Ref. de programa arg.
Tarea: arg.
Nivel de trayectoria incorrecto. No es posible utilizar
SyncMoveOn o SyncMoveOff en el nivel StorePath.
Se usa arg: arg.
Ref. de programa arg.
Acciones recomendadas
41545, Error de argumento
Compruebe el programa de RAPID.
Descripción
Tarea: arg.
41550, Error de inicio/paro de PathRecorder
Es posible que el argumento arg no sea del tipo LOCAL PERS.
Descripción
Ref. de programa arg.
Tarea: arg.
Acciones recomendadas
Elimine la directiva LOCAL de la declaración del dato.
Imposible ejecutar arg.
Ref. de programa arg.
Acciones recomendadas
41546, Error de argumento
Asegúrese de que no se haya iniciado un movimiento hacia
Descripción
atrás si PathRecMoveBwd no finaliza con PathRecMoveFwd.
Tarea: arg.
El objeto arg no existe en el sistema o es de tipo LOCAL PERS.
41551, Error de movimiento de PathRecorder
Ref. de programa arg.
Descripción
Acciones recomendadas
Declare el objeto. Elimine la directiva LOCAL de la declaración
del dato.
Tarea: arg.
Imposible ejecutar arg. El identificador indicado no está
disponible.
Ref. de programa arg.
41547, Error de argumento
Consecuencias
Descripción
La ejecución del programa se detendrá inmediatamente.
Tarea:arg.
El modificador \Corr no puede usarse sin la opción Path Offset.
Causas probables
El motivo de este error es uno de los siguientes: PathRecorder
Ref. de programa arg.
no se ha iniciado. El puntero de programa ha sido movido
Acciones recomendadas
manualmente. Se ha rebasado el límite de arg instrucciones
Elimine el argumento o instale la opción.
de movimiento. La ejecución del programa ha sido limitada por
WaitSyncTask o SyncMoveOff.
Acciones recomendadas
Compruebe el programa de RAPID.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
303
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41552, Error de nivel de trayectoria de
PathRecorder
41556, No hay comunicación con el dispositivo
de E/S
Descripción
Descripción
Tarea: arg.
Tarea: arg.
Imposible ejecutar arg en el nivel de trayectoria actual.
No hay comunicación con el dispositivo de E/S.
Ref. de programa arg.
Ref. de programa arg.
Acciones recomendadas
Causas probables
Cambie al nivel TRAP. Ejecute StorePath para cambiar de nivel
Es posible que el dispositivo de E/S haya sido desactivado.
de trayectoria.
El dispositivo de E/S no tiene alimentación.
Acciones recomendadas
41553, Datos destruidos
Recuperación: arg.
Descripción
El dato de sistema arg de una de las tareas ha cambiado. NO
se permite cambiar este dato.
41557, Unidad mecánica no detenida
Descripción
Acciones recomendadas
Tarea: arg.
El sistema ha restaurado el dato al iniciarse, pero es necesario
Imposible cambiar de modo de ejecución si no están detenidas
comprobar el programa. Elimine la definición en la que se
todas las tareas de movimiento.
asigna un valor a arg.
Ref. de programa arg.
Acciones recomendadas
41554, Modo sincronizado
Realice un paro de programa y vuelva a intentarlo.
Descripción
41558, Falta un modificador de argumento
Tarea: arg.
No es posible usar el parámetro opcional \Conc si el sistema
se encuentra en el modo sincronizado.
Ref. de programa arg.
Descripción
Tarea: arg.
Falta un argumento en la instrucción arg.
Acciones recomendadas
Ref. de programa arg.
Elimine el parámetro opcional \Conc de cualquier instrucción
de movimiento que se utilice en el modo sincronizado.
Acciones recomendadas
Añada el modificador SyncOrgMoveInst o SyncLastMoveInst
a la instrucción.
41555, No hay comunicación con el dispositivo
de E/S
Descripción
41559, Ninguna variable PERS
Descripción
Tarea: arg.
Tarea: arg.
Se ha perdido el contacto con el dispositivo de E/S arg.
Ref. de programa arg.
La lista de tareas arg es LOCAL o persistente de la tarea. Se
trata de una posibilidad no permitida. La variable debe ser
Causas probables
global.
Es posible que el dispositivo de E/S haya sido desactivado.
Ref. de programa arg.
El dispositivo de E/S no tiene alimentación.
Acciones recomendadas
Acciones recomendadas
Cambie la lista de tareas a PERS.
Recuperación: arg.
41560, Ningún inicio de movimiento
Descripción
Tarea: arg.
Imposible iniciar el movimiento.
Continúa en la página siguiente
304
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Ref. de programa arg.
Acciones recomendadas
Una de las siguientes: Edite el programa. Mueva el puntero de
Causas probables
Se ha producido un paro de emergencia. Se ha producido otro
programa para poder iniciar el programa.
tipo de error en el sistema.
41563, Error de argumento
Acciones recomendadas
Restablezca el paro de emergencia si se ha producido.
Descripción
Compruebe los mensajes anteriores para determinar la causa.
Tarea: arg.
Recuperación: arg.
La unidad mecánica arg especificada en el objeto de trabajo
WObj para esta instrucción MOVE es la misma que la unidad
41561, No hay ningún texto en la tecla de función
mecánica arg utilizada como robot de esta tarea de programa.
Ref. de programa arg.
Descripción
Consecuencias
Tarea: arg.
La instrucción TPReadFK no tiene ningún texto en ninguna de
El robot no puede mover el objeto de trabajo por sí mismo.
las teclas de función.
Acciones recomendadas
Ref. de programa arg.
Edite los datos de objeto de trabajo utilizados.
Consecuencias
pueda presionar.
41564, No se permite ejecutar desde una tarea
de movimiento
Acciones recomendadas
Descripción
Asigne un texto a al menos una de las teclas de función, de la
Tarea: arg.
TPFK1 a la TPFK5.
Las instrucciones StopMove, StartMove y StopMoveReset con
Mientras se ejecute la instrucción, no habrá ningún botón que
el parámetro de opción \AllMotionTasks no pueden ejecutarse
41562, Riesgo de movimiento circular fallido
desde una tarea de movimiento.
Ref. de programa: arg.
Descripción
Causas probables
Tarea: arg.
Existe el riesgo de que se produzca un movimiento circular
fallido por una de las causas siguientes: Se ha producido un
error de proceso asincrónico no gestionado por ningún gestor
de errores. El puntero de programa está situado en una
Sólo se permite realizar la detención y el reinicio de todos los
movimientos del sistema desde una tarea de supervisión de
programa ejecutada como una tarea de lectura de programa
(o en segundo plano).
instrucción circular en combinación con un MODPOS realizado
Acciones recomendadas
con una instrucción de movimiento anterior. Ref. de programa
Elimine la instrucción.
arg.
Consecuencias
41565, Valor no permitido
Es posible que no se inicie el programa desde la posición
Descripción
actual, dado que existe el riesgo de que el robot realice un
Tarea: arg.
movimiento inesperado.
Valor no válido en el argumento arg.
Causas probables
Ref. de programa arg.
Una de las siguientes: El programa de RAPID no contiene
Acciones recomendadas
ningún gestor de errores o éste no permite gestionar este error
Compruebe y cambie el valor. Debe ser un entero de entre arg
en concreto. Se ha realizado una operación MODPOS sin estar
y arg.
en el modo de ejecución paso por paso o en paso de
movimiento.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
305
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41566, La señal sobrepasa el número máximo de
bits permitidos
El zócalo no puede aceptar peticiones de conexión entrantes
porque no está en el estado de escucha.
Ref. de programa arg.
Descripción
Tarea: arg.
Causas probables
La señal arg es demasiado grande.
Se utiliza SocketAccept antes de SocketListen.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Cambie el zócalo al estado de escucha de conexiones entrantes
Los grupos de señales de 23 bits o menos pueden
antes de intentar aceptar la conexión.
representarse con el tipo de dato num y los grupos de 32 bits
o menos pueden representarse con el tipo de dato dnum, si se
utilizan en un programa de RAPID.
41571, Error de zócalo
Descripción
Tarea: arg.
41567, Interrupción de salida digital
La dirección ya se está utilizando y no puede utilizarse con
Descripción
este zócalo.
Tarea: arg.
Ref. de programa arg.
Una salida digital interrumpió la ejecución.
Acciones recomendadas
Ref. de programa arg.
Recovery: arg.
Acciones recomendadas
41572, Error de zócalo
Recuperación: arg.
Descripción
41568, El nombre especificado no pertenece a
ninguna red
Tarea: arg.
Descripción
Consulte el registro para comprobar si hay más mensajes que
Tarea: arg.
indiquen la posible causa.
El nombre de red arg no existe.
Ref. de programa arg.
Ref. de programa: arg.
Acciones recomendadas
Causas probables
Mueva el puntero de programa a main y reinicie el programa.
Se ha producido un error inesperado al crear el zócalo.
El nombre del dispositivo de E/S está mal escrito o no definido.
41573, Error de socket
Acciones recomendadas
Descripción
Recuperación: arg.
Tarea: arg.
41569, Error de zócalo
No es posible crear más sockets. El número máximo de sockets
simultáneos es 32.
Descripción
Ref. de programa arg.
Tarea: arg.
El zócalo ya está conectado y no puede usarse para
Acciones recomendadas
permanecer a la escucha de conexiones entrantes.
Cierre uno o varios sockets para permitir la creación de un
Ref. de programa arg.
nuevo zócalo.
Acciones recomendadas
Utilice otro zócalo para permanecer a la escucha de conexiones
41574, Error de zócalo
Descripción
entrantes.
Tarea: arg.
41570, Error de zócalo
Es necesario crear el zócalo antes de poder utilizarlo en
cualquier instrucción de zócalo.
Descripción
Ref. de programa arg.
Tarea: arg.
Continúa en la página siguiente
306
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Causas probables
Consulte el registro para comprobar si hay más mensajes que
El motivo de este error es uno de los siguientes: El zócalo ni
indiquen la posible causa.
siquiera está creado. Se han realizado movimientos de PP.
Ref. de programa arg.
Inicio del programa tras una caída de alimentación. El zócalo
ha sido cerrado después de SocketCreate.
Acciones recomendadas
Mueva el puntero de programa a main y reinicie el programa.
Acciones recomendadas
Inserte una instrucción SocketCreate en un lugar adecuado del
programa antes de utilizar el zócalo.
41579, Error de zócalo
Descripción
Recuperación: arg.
Tarea: arg.
La conexión fue rechazada por el host remoto.
41575, Error de zócalo
Ref. de programa arg.
Descripción
41580, Error de zócalo
Tarea: arg.
La dirección especificada no es válida. Las únicas direcciones
válidas son la dirección de red local del controlador o la
dirección del puerto de servicio, 192.168.125.1.
Ref. de programa arg.
Descripción
Tarea: arg.
El zócalo ya está conectado y no es posible volver a conectarse
a él.
Acciones recomendadas
Ref. de programa arg.
Especifique la dirección de red local o la dirección del puerto
de servicio.
Causas probables
SocketConnect ya se ha ejecutado para el zócalo especificado.
Acciones recomendadas
41576, Error de zócalo
Cierre el zócalo y vuelva a crearlo antes de conectarse.
Descripción
Tarea: arg.
41581, Error de zócalo
El puerto especificado no es válido.
Descripción
Ref. de programa arg.
Tarea: arg.
Acciones recomendadas
Se recomienda utilizar un número de puerto del rango de 1.025
a 4.999.
La instrucción no finalizó dentro del intervalo de tiempo límite.
Ref. de programa arg.
Acciones recomendadas
Utilice un valor de tiempo límite mayor o utilice un gestor de
41577, Error de zócalo
errores para volver a intentar la instrucción.
Descripción
Recuperación: arg.
Tarea: arg.
El tiempo límite especificado en la instrucción es insuficiente.
41582, Error de zócalo
El tiempo límite se especifica en segundos y debe ser distinto
de cero.
Descripción
Ref. de programa arg.
Tarea: arg.
Se especificó un dato vacío para su envío o como lugar de
Acciones recomendadas
Utilice un valor de tiempo límite mayor que 0.
almacenamiento en una recepción.
Ref. de programa arg.
Acciones recomendadas
41578, Error de zócalo
Utilice un dato de tipo string o rawbyte o una matriz de bytes
Descripción
que tenga un tamaño mayor que cero.
Tarea: arg.
Se ha producido un error inesperado al conectarse al zócalo.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
307
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41583, Error de zócalo
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
Mueva el puntero de programa a main y reinicie el programa.
El dato especificado es demasiado grande.
Ref. de programa arg.
41588, Error de socket
Acciones recomendadas
Descripción
Los zócalos pueden manejar 1.024 bytes como máximo en una
Tarea: arg.
instrucción.
No se encuentra la red.
Se intentó una operación de socket en una red que no se
41584, Error de zócalo
encuentra.
Por lo general quiere significa que el software local no conoce
Descripción
ninguna ruta para llegar al host remoto.
Tarea: arg.
La cadena o el dato especificado para su envío está vacío.
Ref. de programa: arg.
Consecuencias
Ref. de programa arg.
La operación fue anulada.
Acciones recomendadas
Compruebe que el dato sea correcto.
Acciones recomendadas
Comprueba tu conexión y los ajustes de red.
41585, Error de zócalo
Recuperación: arg
Descripción
41590, Error de zócalo
Tarea: arg.
El número de bytes a enviar debe ser un valor mayor que cero.
Descripción
Ref. de programa arg.
Tarea: arg.
La matriz de bytes no es válida. Las matrices de bytes sólo
Acciones recomendadas
Cambie el valor del parámetro opcional NoOfBytes a un valor
mayor que cero.
pueden contener números enteros de entre 0 y 255.
Ref. de programa arg.
Acciones recomendadas
Cambie la matriz de bytes para que contenga datos válidos o
41586, Error de zócalo
utilice el tipo de datos rawbytes para enviar datos más
Descripción
complejos.
Tarea: arg.
El número de bytes especificado para el envío es mayor que
41591, Error de zócalo
la longitud del dato en sí.
Descripción
Ref. de programa arg.
Tarea: arg.
Acciones recomendadas
Cambie el valor del parámetro opcional NoOfBytes para que
sea menor que o igual a la longitud del dato en sí.
Error inesperado al intentar obtener el estado del zócalo.
Ref. de programa arg.
Si desea enviar la totalidad del dato, elimine el parámetro
Acciones recomendadas
opcional.
Mueva el puntero de programa a main y reinicie el programa.
41587, Error de zócalo
41592, Error de zócalo
Descripción
Descripción
Tarea: arg.
Tarea: arg.
Se ha producido un error inesperado al enviar datos.
No se recibió ningún dato.
Consulte el registro para comprobar si hay más mensajes que
Ref. de programa arg.
indiquen la posible causa.
Continúa en la página siguiente
308
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Causas probables
Se ha producido un error inesperado al enlazar el zócalo.
Es posible que la conexión haya sido cerrada por el host
Ref. de programa arg.
remoto.
Acciones recomendadas
Acciones recomendadas
Mueva el puntero de programa a main y reinicie el programa.
Mueva el puntero de programa a main y reinicie el programa.
41597, Error de zócalo
41593, Error de zócalo
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El zócalo ya está enlazado a una dirección y no es posible
El dato recibido es demasiado largo como para almacenarlo
volver a enlazarlo.
en una cadena. La longitud máxima de un dato que puede
Ref. de programa arg.
almacenarse en una cadena es de 80 caracteres.
Ref. de programa arg.
Acciones recomendadas
Cierre el zócalo y vuelva a crearlo antes de intentar enlazar el
Acciones recomendadas
zócalo a otra dirección.
Utilice una matriz de bytes o un dato de tipo rawbytes para
recibir datos con una longitud superior a 80 bytes.
41598, Error de zócalo
Descripción
41594, Error de zócalo
Tarea: arg.
Descripción
Error inesperado al intentar activar la escucha de conexiones.
Tarea: arg.
Ref. de programa arg.
El zócalo no está conectado.
Acciones recomendadas
Ref. de programa arg.
Mueva el puntero de programa a main y reinicie el programa.
Causas probables
En el caso del cliente, utilice SocketConnect antes de
recibir/enviar/consultar datos.
En el caso del servidor, utilice SocketAccept antes de
recibir/enviar/consultar datos.
41599, Error de zócalo
Descripción
Tarea: arg.
El zócalo no ha sido enlazado a ninguna dirección.
Acciones recomendadas
Ref. de programa arg.
Utilice SocketConnect o SocketAccept para conectar el zócalo
antes de intentar recibir/enviar/consultar.
Acciones recomendadas
Utilice SocketBind para especificar la dirección en la cual desea
permanecer a la escucha de conexiones entrantes.
41595, Error de zócalo
41600, Error de zócalo
Descripción
Tarea: arg.
La conexión ha sido cerrada por el host remoto.arg.
Ref. de programa.
Descripción
Tarea: arg.
El zócalo de cliente especificado ya se está utilizando. El zócalo
Acciones recomendadas
de cliente no debe ser creado antes de llamar a SocketAccept.
Utilice un gestor de errores para volver a establecer la conexión
Ref. de programa arg.
antes de reintentar el envío/recepción/consulta.
Recuperación: arg.
Causas probables
SocketAccept ya se ha ejecutado para el zócalo especificado.
Acciones recomendadas
41596, Error de zócalo
Cierre el zócalo de cliente antes de utilizarlo en la llamada a
Descripción
SocketAccept o elimine los múltiples SocketAccept que tengan
Tarea: arg.
el mismo zócalo de cliente.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
309
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41601, Error de zócalo
Consecuencias
La ejecución del programa se detendrá inmediatamente.
Descripción
Tarea: arg.
Causas probables
Se ha producido un error inesperado al aceptar la conexión.
El socket utilizado no es válido. Es posible que el arg haya sido
Ref. de programa arg.
copiado con la instrucción arg. En este caso, el arg original ha
sido cerrado con arg. Si se utiliza el arg copiado, tendrá este
Acciones recomendadas
Mueva el puntero de programa a main y reinicie el programa.
problema. Un módulo que se ha instalado de modo compartido
contiene una declaración de una variable del tipo de dato
socketdev. La variable se ha utilizado al crear un nuevo socket.
41602, Error de zócalo
Al mover el PP a Main, la variable socketdev conserva su valor,
pero deja de ser válida.
Descripción
Tarea: arg.
Acciones recomendadas
Se ha producido un error inesperado al recibir datos.
Ref. de programa arg.
Utilice instrucciones de socket al manejar los tipos de datos
de arg.
Acciones recomendadas
No declare ni utilice variables socketdev en un módulo
Mueva el puntero de programa a main y reinicie el programa.
compartido.
41603, Error de zócalo
41606, Error de zócalo
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El zócalo ya ha sido creado.
El tipo de zócalo corresponde al tipo de datagrama del protocolo
Los zócalos sólo pueden ser creados una vez y es necesario
UDP/IP.
cerrarlos para volver a crearlos.
La instrucción actual arg sólo se admite para el tipo de canal
Ref. de programa arg.
del protocolo TCP/IP.
Ref. de programa arg.
Acciones recomendadas
Utilice otro zócalo o cierre el zócalo antes de crearlo.
Consecuencias
La ejecución del programa se detendrá inmediatamente.
41604, Error de zócalo
Causas probables
Descripción
El tipo de zócalo utilizado no es válido.
Tarea: arg.
Acciones recomendadas
El zócalo ya está a la escucha de conexiones entrantes.
Compruebe de qué forma se creó el zócalo.
Sólo es posible usar un zócalo una vez para permanecer a la
escucha de conexiones entrantes.
41607, Error de zócalo
Ref. de programa arg.
Descripción
Causas probables
Tarea: arg.
Uso múltiple de SocketListen con el mismo zócalo.
El tipo de zócalo corresponde al tipo de canal del protocolo
Acciones recomendadas
TCP/IP.
Utilice otro zócalo o cierre el zócalo antes de volver a usarlo.
La instrucción actual arg sólo se admite para el datagrama del
protocolo UDP/IP.
41605, Error de socket
Ref. de programa arg.
Descripción
Consecuencias
Tarea: arg.
La ejecución del programa se detendrá inmediatamente.
El socket ya no es válido.
Causas probables
Ref. de programa arg.
El tipo de zócalo utilizado no es válido.
Continúa en la página siguiente
310
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
Recuperación: arg.
Compruebe de qué forma se creó el zócalo.
41614, InitValue no es un entero
41611, UIMsgBox - No se ha definido ninguna
acción de usuario o programa
Descripción
Descripción
En la función arg, el argumento \InitValue no es un valor entero
Tarea: arg.
como se especifica con el argumento \AsInteger.
La instrucción UIMsgBox o la función UIMessageBox no tienen
Ref. de programa arg.
definida ninguna acción de usuario o programa.
No se utiliza ninguno de los argumentos opcionales \Buttons,
Tarea: arg.
Consecuencias
La ejecución del programa no puede continuar.
\BtnArray,\MaxTime, \DIBreak ni \DOBreak.
Acciones recomendadas
Ref. de programa arg.
Cambie el argumento \InitValue a un entero.
Consecuencias
Recuperación: arg.
El programa de RAPID se ejecutará de forma indefinida.
41615, Error de referencia
Acciones recomendadas
Utilice uno o varios de los argumentos \Buttons, \BtnArray,
\MaxTime, \DIBreak o \DObreak.
Descripción
Tarea: arg.
Recuperación: arg.
El dato datapos arg no está definido.
41612, MinValue mayor que MaxValue
Ref. de programa arg.
Acciones recomendadas
Descripción
Todos los datos datapos se obtienen con la función
Tarea: arg.
GetNextSym.
En la función arg, el argumento \MinValue es mayor que
\MaxValue.
41616, Error de referencia
Ref. de programa arg.
Descripción
Consecuencias
No es posible proseguir con la ejecución del programa.
Acciones recomendadas
Tarea: arg.
La ID de tarea arg es desconocida en el sistema.
Ref. de programa arg.
Modifique el programa de RAPID de forma que el argumento
\MaxValue sea mayor que \MinValue.
Recuperación: arg.
Acciones recomendadas
Las tareas de programa deben estar definidas en los parámetros
del sistema y no en el programa de RAPID (la ID de tarea puede
41613, InitValue fuera del rango de valores
especificado
Descripción
Tarea: arg.
En la función arg, el argumento \InitValue no está especificado
dentro del rango \MaxValue ... \MinValue.
Ref. de programa arg.
usarse como parámetro al declarar una rutina).
41617, Frecuencia excesiva de instrucciones de
escritura
Descripción
Una frecuencia elevada de instrucciones de escritura en la
interfaz de usuario, por ejemplo de TPWrite, ha forzado la
ralentización de la ejecución del programa.
Consecuencias
No es posible proseguir con la ejecución del programa.
Acciones recomendadas
Reduzca la frecuencia de uso de las instrucciones de escritura
Acciones recomendadas
en la interfaz de usuario. Añada instrucciones de espera, como
Cambie el valor del argumento \InitValue de forma que esté
WaitTime, si utiliza muchas instrucciones de escritura juntas.
dentro del rango de valores.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
311
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41618, Error de argumento buttondata
Consecuencias
La ejecución del programa se detendrá inmediatamente.
Descripción
Tarea: arg.
Causas probables
El argumento Buttons del tipo buttondata no tiene un valor
Error en los programas de RAPID.
permitido.
Acciones recomendadas
Sólo se permite utilizar los datos predefinidos del tipo
Compruebe que no se estén mezclando instrucciones StorePath
buttondata.
y StorePath \KeepSync.
Ref. de programa arg.
Modifique el programa.
Causas probables
Es necesario mover el PP en todas las tareas para poder
Buttondata debe ser: Un entero. Un valor perteneciente al rango
continuar.
predefinido.
41622, Instrucción inesperada
Acciones recomendadas
Descripción
Edite el programa.
Tarea: arg.
41619, Error de argumento icondata
La instrucción arg sólo puede usarse entre la instrucción arg
y la instrucción arg (en el nivel de almacenamiento de
Descripción
trayectoria).
Tarea: arg.
El argumento Icon del tipo icondata no tiene un valor permitido.
Ref. de programa arg.
Sólo se permite utilizar los datos predefinidos del tipo icondata.
Consecuencias
Ref. de programa arg.
La ejecución del programa se detendrá inmediatamente.
Causas probables
Causas probables
Icondata debe ser: Un entero. Un valor perteneciente al rango
Error en el programa de RAPID.
predefinido.
Acciones recomendadas
Acciones recomendadas
Compruebe y modifique el programa de RAPID.
Edite el programa.
Debe mover el PP en todas las tareas antes de continuar.
41620, Error de zócalo
41623, Uso defectuoso de arg
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El subsistema de mensajería de zócalos está sobrecargado.
La instrucción arg se utiliza varias veces o la instrucción se
Ref. de programa arg.
utiliza cuando ya se estaba en el modo de movimiento
sincronizado.
Causas probables
Esto puede ocurrir al crear y cerrar zócalos frecuentemente y
en rápida sucesión.
arg suspende los movimientos sincronizados coordinados.
arg reanuda los movimientos sincronizados coordinados.
Ref. de programa arg.
Acciones recomendadas
Pruebe a reescribir el programa de forma que los zócalos se
reutilicen, en lugar de cerrarlos y crearlos de nuevo.
Consecuencias
La ejecución del programa se detendrá inmediatamente.
Causas probables
Error en el programa de RAPID.
41621, Error de StorePath
Acciones recomendadas
Descripción
Compruebe y modifique el programa de RAPID.
Tarea: arg.
La instrucción arg con el modificador arg se usa en una o varias
Debe mover el PP en todas las tareas antes de continuar.
tareas, junto con arg sin el modificador arg.
Ref. de programa arg.
Continúa en la página siguiente
312
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41625, No se esperaba arg
Acciones recomendadas
Compruebe y modifique el programa de RAPID.
Descripción
Debe mover el PP en todas las tareas antes de continuar.
Tarea: arg.
La instrucción arg se utiliza directamente después de la
instrucción arg o el sistema no se encuentra en el modo de
41630, Sincronización no segura
movimientos sincronizados.
Descripción
No es posible hacer el cambio al modo de movimiento
Tarea: arg.
independiente.
Para conseguir una funcionalidad de sincronización segura, la
Ref. de programa arg.
variable arg debe usarse sólo una vez, no en distintas
instrucciones arg o arg.
Consecuencias
La ejecución del programa se detendrá inmediatamente.
Ref. de programa arg.
Consecuencias
Causas probables
No es posible sincronizar siempre las tareas de programa o
Error en el programa de RAPID.
los movimientos.
Acciones recomendadas
Compruebe y modifique el programa de RAPID.
Debe mover el PP en todas las tareas antes de continuar.
Causas probables
Se utiliza arg varias veces en un mismo programa.
Acciones recomendadas
41626, No se esperaba arg \ arg
Descripción
Compruebe y modifique el programa de RAPID.
41631, Error de instrucción
Tarea: arg.
La instrucción arg \ arg se utiliza en el modo de movimiento
Descripción
independiente.
Tarea: arg.
Ref. de programa arg.
El programa está ejecutando una rutina EVENT. No se permite
ejecutar la instrucción actual en una rutina EVENT en la bandeja
Consecuencias
La ejecución del programa se detendrá inmediatamente.
arg.
Ref. de programa arg.
Causas probables
Acciones recomendadas
Error en el programa de RAPID.
Elimine la instrucción.
Acciones recomendadas
Compruebe y modifique el programa de RAPID.
Debe mover el PP en todas las tareas antes de continuar.
41632, El argumento no existe
Descripción
41627, Uso defectuoso de arg
Tarea: arg.
La instrucción TPShow solo admite TP_LATEST.
Descripción
Ref. de programa arg.
Tarea: arg.
arg se usa en el nivel de almacenamiento de trayectoria y el
sistema no se encontraba en el modo de movimiento
Consecuencias
Si se utiliza otro argumento distinto de TP_LATEST, no ocurrirá
nada.
sincronizado antes de arg.
Acciones recomendadas
Ref. de programa arg.
Elimine la instrucción.
Consecuencias
La ejecución del programa se detendrá inmediatamente.
41633, Sólo puede usarse en un gestor UNDO
Causas probables
Descripción
Error en el programa de RAPID.
Tarea: arg.
La instrucción arg sólo puede usarse en un gestor UNDO.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
313
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Ref. de programa arg.
Acciones recomendadas
Elimine la instrucción SyncMoveOff. Cada instrucción
Consecuencias
La ejecución del programa se detendrá.
SyncMoveOn debe ir seguida de una instrucción SyncMoveOff.
Compruebe sus listas de tareas.
Acciones recomendadas
Utilice otra instrucción y/o traslade esta instrucción hasta el
gestor UNDO.
41637, Tarea ya no activa en el panel de selección
de tareas
41634, Nombre de tarea desconocido
Descripción
Tarea: arg.
Descripción
La tarea arg ya no está activa en el panel de selección de
Tarea: arg.
tareas.
El nombre de tarea arg es desconocido en el sistema.
Ref. de programa arg.
La tarea arg esta activada en el panel de selección de tareas
desde Main.
Consecuencias
Por ese motivo, no es posible entregar esta instrucción arg.
No es posible ejecutar esta instrucción con un nombre de tarea
Ref. de programa arg.
que no se encuentra en el sistema.
Consecuencias
Causas probables
La ejecución del programa se detendrá inmediatamente.
La tarea de programa no está definida en los parámetros del
sistema. El nombre de la tarea no está bien escrito.
Acciones recomendadas
Causas probables
La tarea ask arg ha sido desactivada en el panel de selección
de tareas.
Recuperación: arg.
Acciones recomendadas
41635, Instrucción SyncMoveOff inesperada
Active la tarea arg en el panel de selección de tareas. Para
omitir permanentemente la tarea arg durante el resto de de
Descripción
este ciclo, ejecute la rutina de servicio SkipTaskExec. A
Tarea: arg.
continuación, reinicie la instrucción arg.
SyncMoveOff inesperada (SyncID arg). El sistema ya se
encuentra en el modo no sincronizado.
Ref. de programa arg.
41638, Activación de tarea no permitida
Descripción
Causas probables
Tarea: arg.
El uso de listas de tareas no globales puede dar lugar a este
La tarea arg está activa en el panel de selección de tareas. Esta
error.
tarea no estaba activada en el panel de selección de tareas al
Acciones recomendadas
realizar el inicio desde Main. No se permite añadir tareas al
Elimine la instrucción SyncMoveOff. Cada instrucción
panel de selección de tareas tras el inicio desde Main.
SyncMoveOn debe ir seguida de una instrucción SyncMoveOff.
Ref. de programa arg.
Compruebe sus listas de tareas.
Consecuencias
La ejecución del programa se detendrá inmediatamente.
41636, Instrucción SyncMoveOff inesperada
Causas probables
Descripción
La tarea arg no estaba activada al realizar el inicio desde Main.
Tarea: arg.
Desactivación de la tarea arg con la rutina de servicio arg, pero
SyncMoveOff inesperada (SyncId arg) desde una tarea no
sin desactivación de la tarea en el panel de selección de tareas.
incluida en el grupo sincronizado.
Activación de la tarea arg desactivada anteriormente en el panel
Ref. de programa arg.
de selección de tareas y desactivación con la rutina de servicio
arg.
Causas probables
El uso de listas de tareas no globales puede dar lugar a este
error.
Continúa en la página siguiente
314
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41642, Error de argumento
Acciones recomendadas
Mueva el PP a Main para restablecer las tareas utilizadas
durante el inicio desde Main. A continuación, utilice el panel
de selección de tareas para seleccionar las tareas que desee
ejecutar.
Descripción
Tarea: arg.
El argumento arg está fuera de rango.
Ref. de programa arg.
41640, Advertencia de movimiento de PP
Acciones recomendadas
arg debe ser > 0 si arg = 0.
Descripción
Tarea: arg.
41643, Error de argumento
El movimiento del puntero de programa cuando la trayectoria
está almacenada puede dar problemas si se sitúa en un lugar
Descripción
situado más allá de la restauración de la trayectoria.
Tarea: arg.
El argumento arg está fuera de rango.
Consecuencias
La trayectoria puede quedar en un estado almacenado de forma
Ref. de programa arg.
Acciones recomendadas
no intencionada.
arg debe ser un entero si arg < 0.
Causas probables
Detención del programa mientras había una trayectoria
almacenada. A continuación, se ha realizado un movimiento
de PP dentro del programa.
41644, Error de argumento
Descripción
Tarea: arg.
Acciones recomendadas
Asegúrese de que la restauración de la trayectoria no se omita
trasladando el PP a una instrucción RestoPath en caso
necesario.
El argumento arg está fuera de rango.
Ref. de programa arg.
Acciones recomendadas
arg debe ser superior o igual a 0.
41641, Advertencia de movimiento de PP
41645, Programa parado desde RAPID
Descripción
Tarea: arg.
Descripción
El movimiento del puntero de programa cuando el movimiento
Tarea: arg.
de detención está activo puede dar lugar a problemas si se
El programa y el movimiento se detienen con System Stop
sitúa en un punto situado más allá de la desactivación del
desde RAPID.
movimiento.
Ref. de programa arg.
Consecuencias
Consecuencias
El reinicio del movimiento puede estar bloqueado.
Debido a una detención de sistema programada en RAPID, se
La ejecución del programa puede estar en espera en las
detienen tanto la ejecución del programa como los movimientos.
instrucciones de movimiento.
El problema que ha dado lugar a la detención se ha mostrado
presumiblemente en otro registro.
Causas probables
Detención del programa cundo había un movimiento de
Acciones recomendadas
detención activo. A continuación, se ha realizado un movimiento
Determine por qué el programa se ha detenido (puede ser en
de PP dentro del programa.
otros registros), corrija el problema y reinicie el programa.
Acciones recomendadas
Asegúrese de que no se omita la desactivación del movimiento
41646, Programa bloqueado desde RAPID
de detención.
Descripción
Tarea: arg.
El programa y el movimiento se detienen y bloquean con
System Stop RAPID Block desde RAPID.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
315
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Ref. de programa arg.
Al menos uno de los argumentos de la instrucción arg
sobrepasa las limitaciones descritas en el manual.
Consecuencias
Debido a un paro de sistema programado desde RAPID, se
Ref. de programa arg.
detienen tanto la ejecución del programa como los movimientos.
Causas probables
El problema que ha causado el paro se ha presentado
Los argumentos de la instrucción arg contienen limitaciones
preferentemente en otro registro.
tanto en las distintas cadenas como en la cantidad total de
Si el robot está realizando un movimiento circular, es necesario
caracteres utilizada en la instrucción. Esto se describe en el
mover el robot hasta el inicio del movimiento circular antes de
manual.
reiniciar el programa.
Acciones recomendadas
Acciones recomendadas
Consulte el manual y corrija los argumentos.
Determine por qué el programa ha sido bloqueado (quizá a
través de otros registros), corrija el problema y sitúe el puntero
de programa de todas las tareas de movimiento antes de
reiniciar el programa.
41650, Tarea ya detenida por otra tarea
Descripción
La tarea sin movimiento arg ha ejecutado una instrucción
41647, Programa detenido desde RAPID
StopMove. Sin embargo, no se ha producido ninguna acción
de paro porque la tarea de movimiento arg ya había sido
Descripción
detenida por la tarea arg.
Tarea: arg.
Ref. de programa arg.
El programa y el movimiento se paran con System Halt desde
RAPID.
Consecuencias
La tarea de movimiento debe iniciarse, con la instrucción
Ref. de programa arg.
StartMove, desde la tarea que la detuvo, o es necesario usar
Consecuencias
el modificador \AllMotionTasks en StartMove desde esta tarea.
Debido a un paro de sistema programado en RAPID, se
detienen tanto la ejecución del programa como los movimientos.
El problema que ha dado lugar al paro se ha mostrado
preferentemente en otro registro.
41651, Acciones StartMove omitidas para la tarea
Descripción
La tarea sin movimiento arg ha ejecutado una instrucción
Acciones recomendadas
StartMove. Sin embargo, la tarea de movimiento arg no ha sido
Determine por qué el programa se ha parado (puede ser en
iniciada.
otros registros), corrija el problema y cambie al estado Motores
Ref. de programa arg.
ON antes de reiniciar el programa.
Consecuencias
No es posible realizar ningún movimiento si la tarea de
41648, Error de ejecución
movimiento ha sido detenida por otra tarea sin movimiento.
Descripción
Causas probables
Tarea: arg.
La tarea de movimiento no ha sido detenida. La tarea de
No se permite cambiar el modo de ejecución de hacia delante
a hacia atrás, de continuo a paso a paso, o viceversa.
movimiento fue detenida por otra tarea sin movimiento: arg.
En esta ocasión la causa fue arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Utilice el modificador \AllMotionTasks de StartMove si esta
Seleccione el modo de ejecución original y continúe la ejecución
del programa.
instrucción debe iniciar un movimiento que ha sido detenido
por otra tarea sin movimiento.
41649, Mensaje de error incorrecto
Descripción
Tarea: arg.
Continúa en la página siguiente
316
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41652, Acción StartMove forzada
Descripción
41655, Argumento de una tarea que no es de
movimiento
La tarea sin movimiento arg ha ejecutado una instrucción
Descripción
StartMove. La instrucción detectó que la tarea de movimiento
Tarea: arg.
arg ha sido detenida por esta tarea. Esta tarea de movimiento
Se ha usado la función/instrucción arg con un argumento que
será iniciada para evitar paros de movimientos inesperados.
se refiere a otra tarea, arg. Esa tarea no es una tarea de
Ref. de programa arg.
movimiento (control de unidades mecánicas) y por tanto no
puede usarse.
Causas probables
La tarea de movimiento ha sido detenida con el modificador
Ref. de programa arg.
\AllMotionTasks activo en la instrucción StopMove, pero no en
Causas probables
la instrucción StartMove. La instrucción StopMove ha sido
arg con el argumento \TaskRef o \TaskName sólo pueden
ejecutada en el modo sincronizado y la instrucción StartMove
usarse sin que aparezcan errores si la tarea a la que se refieren
en el modo independiente.
los argumentos es una tarea de movimiento.
Acciones recomendadas
41653, Error de argumento CalcJointT
Cambie el argumento \TaskRef o \TaskName o elimínelo y
Descripción
reanude la ejecución del programa.
Tarea: arg.
Recuperación: arg.
No es posible ejecutar la función CalcJointT con el argumento
\UseCurWObjPos, si el objeto de trabajo coordinado movido
por alguna unidad mecánica está situado en la misma tarea
que el robot del TCP o si el objeto de trabajo no es movido por
ninguna unidad mecánica en absoluto.
Ref. de programa arg.
41656, Valor no permitido
Descripción
Tarea: arg.
Valor no válido en el argumento arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Elimine el argumento \UseCurWObjPos, de forma que la función
Compruebe y cambie el valor. Debe estar entre arg y arg.
CalcJointT pueda ser ejecutada y el cálculo pueda ser realizado
con datos únicamente del programa de RAPID.
41657, Error de acceso a archivo
41654, Error de ejecución CalcJointT
Descripción
Tarea: arg.
Descripción
Imposible acceder el archivo/dispositivo arg.
Tarea: arg.
Ref. de programa arg.
No ha sido posible ejecutar la función CalcJointT con el
argumento \UseCurWObjPos, porque la unidad mecánica arg
se estaba moviendo en el momento de la ejecución de
Causas probables
La ruta o el nombre de archivo son incorrectos. Se ha
sobrepasado el número máximo de archivos abiertos
CalcJointT.
simultáneamente. El disco está lleno. La función no admite la
Ref. de programa arg.
comprobación del dispositivo seleccionado.
Acciones recomendadas
La función CalcJointT con el argumento \UseCurWObjPos sólo
puede ser ejecutada sin errores si el objeto de trabajo
coordinado movido por otra tarea se encuentra en reposo.
Recuperación: arg.
Acciones recomendadas
Compruebe la ruta o el nombre del archivo. Compruebe el
espacio del disco. Recuperación: arg.
41658, Tarea de programa en estado StopMove
Descripción
Tarea: arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
317
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
No se realizará ningún movimiento en esta tarea de movimiento,
Acciones recomendadas
porque la tarea se encuentra en el estado StopMove ordenado
Compruebe los parámetros de entrada. Asegúrese de que los
por alguna tarea sin movimiento.
módulos se han cargado correctamente en el controlador de
robot. Compruebe que la opción FlexPendant Interface se esté
Consecuencias
utilizando. Recuperación: arg.
Imposible iniciar ningún movimiento.
Causas probables
Alguna tarea sin movimiento conectada a esta tarea de
movimiento ha cambiado la tarea al estado StopMove.
41662, No se puede cargar el conjunto
Descripción
Tarea: arg.
Acciones recomendadas
Para realizar movimientos en esta tarea de movimiento, el
estado StopMove debe ser reseteado por la tarea sin
movimiento responsable a través de una de las acciones
El conjunto se ha encontrado pero no pudo ser cargado.
Estado arg.
Ref. de programa arg.
siguientes: Ejecutar StartMove. Iniciar la tarea sin movimiento
Consecuencias
desde Main. a) Desconectar y volver a conectar la alimentación
La vista no se iniciará.
si se trata de una tarea sin movimiento semiestática.
Acciones recomendadas
b) Realizar el inicio de la instalación si es una tarea sin
Asegúrese de que los módulos cargados sean archivos
movimiento estática.
ejecutables para el FlexPendant.
c) Pasar el PP a Main si es una tarea sin movimiento normal.
Recuperación: arg.
41660, No queda espacio libre para la nueva vista
41663, No se pudo crear la instancia
Descripción
Descripción
Tarea: arg.
Tarea: arg.
Se ha superado el número máximo de vistas.
El conjunto se ha encontrado pero no se pudo crear ninguna
No queda espacio libre en el FlexPendant para la nueva vista.
nueva instancia.
Ref. de programa arg.
Estado arg.
Consecuencias
Ref. de programa arg.
La vista no se iniciará.
Consecuencias
Causas probables
La vista no se iniciará.
Demasiadas vistas abiertas.
Acciones recomendadas
Acciones recomendadas
Asegúrese de que los módulos cargados sean archivos
Cierre una vista e inténtelo de nuevo.
ejecutables para el FlexPendant.
Recuperación: arg.
Recuperación: arg.
41661, No se encuentra el conjunto
41664, El nombre de tipo no es válido para este
conjunto
Descripción
Tarea: arg. El conjunto no se encuentra o no existe. Falta la
Descripción
opción FlexPendant Interface. Estado arg.
Tarea: arg.
Ref. de programa arg.
El parámetro de entrada arg no es válido. El nombre de tipo no
se corresponde con el conjunto.
Consecuencias
Estado arg.
La vista no se iniciará.
Ref. de programa arg.
Causas probables
Imposible encontrar el conjunto arg. La imagen del sistema no
incluye la opción necesaria FlexPendant Interface.
Consecuencias
La vista no se iniciará.
Continúa en la página siguiente
318
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
Compruebe los parámetros de entrada.
Recuperación: arg.
41670, No se permite la matriz completa como
argumento
Descripción
41665, arg no se corresponde con el conjunto a
cargar
Tarea: arg.
El argumento arg es del tipo de dato anytype y por este motivo
sólo puede comprobarse en tiempo de ejecución.
Descripción
No puede usarse una matriz completa como argumento incluso
Tarea: arg.
si la matriz es del tipo de datos correcto.
El tipo o el nombre del conjunto no se corresponde con el usado
Ref. de programa arg.
arg.
Consecuencias
Estado arg.
La ejecución del programa se detendrá inmediatamente.
Ref. de programa arg.
Acciones recomendadas
Consecuencias
Sustituya la matriz con un argumento válido.
La vista no se iniciará.
41671, Frecuencia de sondeo excesiva
Causas probables
Se usa arg sin cambiarlo primero a 0.
Descripción
Acciones recomendadas
Tarea: arg.
Cambie arg a 0 antes de usarlo.
La frecuencia de sondeo especificada es excesiva para el
Recuperación: arg.
sistema de robot.
Ref. de programa arg.
41666, Error no recuperable de UIShow
Descripción
Consecuencias
El sistema puede resultar sobrecargado.
Tarea: arg.
Acciones recomendadas
Se ha recibido el código de error desconocido arg.
Ref. de programa arg.
Cambie la instrucción WaitUntil, argumento \PollRate a un valor
superior o igual a 0,01 s.
Consecuencias
La ejecución del programa se detendrá inmediatamente.
41672, Combinación no válida
Acciones recomendadas
Descripción
Informe del asunto a ABB Robotics.
Tarea: arg.
Combinación no válida de parámetros en Trigg.
41667, Error no recuperable de IU
Ref. de programa: arg.
Descripción
Acciones recomendadas
Tarea: arg.
Ejecute Trigg sin la opción \Time o utilice TriggRampAO con
Se ha utilizado una instrucción o función con el modificador
la opción \Time en ramplength.
arg y sin el argumento opcional arg.
Ref. de programa arg.
41673, Índice fuera de límites
Consecuencias
Descripción
La ejecución del programa se detendrá inmediatamente.
Tarea: arg.
Causas probables
El índice de la instancia de cfg estaba fuera de límites.
Se ha usado una combinación no válida de argumento y
Ref. de programa: arg.
modificadores opcionales.
Acciones recomendadas
Acciones recomendadas
Compruebe y modifique el programa de RAPID.
Corrija el programa RAPID.
Recuperación: arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
319
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41674, Valor fuera de límites
Acciones recomendadas
Elimine la protección contra escritura del archivo o seleccione
Descripción
otro nombre de archivo.
Tarea: arg.
El parámetro arg no está dentro del rango de 0 a 100.
Ref. de programa: arg.
Recuperación: arg.
41679, Error de acceso a dispositivo
Acciones recomendadas
Compruebe y modifique el programa de RAPID.
Descripción
Tarea: arg.
Recuperación: arg.
Se ha excedido el número máximo de archivos abiertos
simultáneamente.
41675, No es un entero
Ref. de programa: arg.
Descripción
Acciones recomendadas
Tarea: arg.
Cierre uno o varios dispositivos de E/S e inténtelo de nuevo.
El parámetro arg no es un entero.
Recuperación: arg.
Ref. de programa: arg.
Acciones recomendadas
41680, Cadena demasiado larga
Compruebe el programa de RAPID o utilice el gestor de errores.
Descripción
Recuperación: arg.
Tarea: arg.
41676, Error de acceso a dispositivo
La cadena arg sobrepasa el número máximo de caracteres
permitido para un módulo.
Descripción
Ref. de programa: arg.
Tarea:arg.
Imposible abrir el archivo o el canal serie 'arg' porque no existe.
Ref. de programa: arg.
Acciones recomendadas
Cambie la cadena del nombre de módulo.
Recuperación: arg.
Acciones recomendadas
Compruebe el nombre de archivo o de canal serie.
41682, Demasiadas suscripciones a la E/S
Recuperación: arg.
Descripción
41677, Error de acceso a dispositivo
Tarea: arg.
Se ha sobrepasado el número máximo de suscripciones
Descripción
simultáneas a eventos de señal.
Tarea: arg.
Ref. de programa: arg.
Imposible escribir en el archivo: arg. El disco está lleno.
Ref. de programa: arg.
Acciones recomendadas
Elimine algunas suscripciones a las señales o cambie el tiempo
Acciones recomendadas
del evento. (Es decir, cualquier señal ISignalXX o TriggIO).
Asegúrese de que quede suficiente espacio libre en el disco.
Recuperación: arg.
41683, Error de argumento
41678, Error de acceso a dispositivo
Descripción
Tarea: arg.
Descripción
El argumento arg debe indicarse al buscar un parámetro sin
Tarea: arg.
nombre.
Imposible escribir en el archivo: arg. El archivo está protegido
Ref. de programa: arg.
contra escritura.
Acciones recomendadas
Ref. de programa: arg.
Añada el parámetro arg a la instrucción.
Continúa en la página siguiente
320
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41684, Error de valor
41688, Argumento no válido
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El argumento arg está fuera del rango del tipo de valor unsigned
El parámetro de entrada arg está declarado como PERS.
long.
Ref. de programa: arg.
Ref. de programa: arg.
Consecuencias
Causas probables
La ejecución del programa se detendrá inmediatamente.
El valor es demasiado grande.
Causas probables
Acciones recomendadas
Uso de una variable PERS en el argumento arg de la instrucción
Utilice un valor más pequeño para arg.
arg.
Acciones recomendadas
41685, Valor no válido
Sustituya la variable PERS con un argumento válido.
Descripción
41690, Error de parámetro
Tarea: arg.
Se usa una combinación incorrecta de modificador y valor. La
señal puede tener valores de:
Descripción
Tarea: arg.
Mín.: arg.
El argumento arg es del tipo arg y no es válido para su uso.
Máx.: arg.
Ref. de programa arg.
Modificador y valor utilizados: arg.
Consecuencias
Ref. de programa arg.
La ejecución del programa se detendrá inmediatamente.
Consecuencias
La ejecución del programa se detendrá inmediatamente.
Acciones recomendadas
Compruebe el tipo del dato. No es posible usar tipos de datos
Causas probables
sin valor, de semivalor o motsetdata.
Valor incorrecto utilizado o modificador incorrecto utilizado.
Acciones recomendadas
Cambie el valor utilizado o cambie el argumento del
modificador.
41691, Error de RMQ - Nombre de cliente no
válido
Descripción
41687, Error de apertura de archivo
Tarea: arg.
El nombre arg no se encuentra. No se trata de un nombre válido
Descripción
de cliente de RMQ.
Tarea: arg.
Ref. de programa arg.
Imposible abrir arg.
Causas probables
Ref. de programa: arg.
Se utiliza un nombre no válido.
Se ha producido un error al abrir el archivo.
Acciones recomendadas
Causas probables
Cambie el nombre a buscar.
Si el archivo estaba situado en un disco USB, compruebe que
Recuperación: arg.
el disco no haya sido retirado y que no tenga demasiados
archivos en la carpeta raíz. Compruebe que el archivo indicado
41692, Error de RMQ - Ranura no válida
no sea un directorio.
Descripción
Acciones recomendadas
Realice una comprobación de causas probables.
Recuperación: arg.
Tarea: arg.
El arg utilizado no es válido.
Ref. de programa arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
321
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Consecuencias
Acciones recomendadas
La comunicación con el cliente que tiene la ranura arg actual
Utilice el tipo de dato arg en el argumento Data. Compruebe
ya no es posible.
que los tipos de datos estén definidos igual tanto en el código
del remitente como en el del destinatario. Recuperación: arg.
Causas probables
arg no ha sido inicializado. La ranura de destino ya no es válida.
del controlador. La instrucción RMQSendWait fue reiniciada
41695, Error de RMQ - Dimensiones no iguales
en los datos
tras una caída de alimentación. Al reiniciar la instrucción, arg
Descripción
cambia a 0.
Tarea: arg.
Acciones recomendadas
Los tipos de datos son iguales, pero las dimensiones son
Recuperación: arg.
diferentes en el dato del mensaje y en el parámetro utilizado
Esto puede ocurrir si un cliente remoto se ha desconectado
en el argumento arg.
41693, Error de RMQ - Sobrepasado el tamaño
máximo del mensaje
Ref. de programa arg.
Consecuencias
Imposible copiar los datos.
Descripción
Tarea: arg.
Acciones recomendadas
El tamaño de los datos de arg sobrepasa el tamaño máximo.
Utilice un parámetro en el argumento arg con dimensiones
Ref. de programa arg.
iguales en el dato y en el mensaje.
Recuperación: arg.
Consecuencias
El mensaje no se enviará.
Causas probables
Intentando enviar mensajes más grandes de arg. Debido a las
41696, Error de RMQ - Uso no válido de una
instrucción
limitaciones de RMQ, no es posible enviar mensajes tan
Descripción
grandes.
Tarea: arg.
La instrucción arg sólo se admite en el nivel de rutina TRAP.
Acciones recomendadas
Ref. de programa arg.
Envíe mensajes más pequeños.
Consecuencias
Recuperación: arg.
La ejecución del programa se detendrá inmediatamente.
41694, Error de RMQ - Tipos de datos no iguales
Causas probables
La instrucción arg se usa en el nivel de ejecución de usuario
Descripción
o en el nivel de ejecución normal.
Tarea: arg.
El tipo de dato de rmqmessage es arg y el tipo de dato del
Acciones recomendadas
argumento Data es del tipo arg.
Elimine la instrucción o trasládela a una rutina TRAP.
Ref. de programa arg.
No es posible capturar ningún dato.
41697, Error de RMQ - Ninguna cola de RMQ
configurada
Causas probables
Descripción
El tipo de dato del mensaje rmqmessage es del tipo arg y el
Tarea: arg.
tipo de dato utilizado en el argumento Data es del tipo arg. Si
No hay ninguna tarea de RMQ configurada para la tarea arg.
los tipos de datos tienen el mismo nombre, la estructura de los
Ref. de programa arg.
datos puede ser diferente.
Consecuencias
Consecuencias
La ejecución del programa se detendrá inmediatamente.
Continúa en la página siguiente
322
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Causas probables
dato necesita una identidad de interrupción única y una rutina
No se ha añadido ninguna configuración para la cola de RAPID
TRAP única.
Message Queue.
Ref. de programa arg.
Acciones recomendadas
Consecuencias
Añada la configuración para la cola de RAPID Message Queue.
La ejecución del programa se detendrá inmediatamente.
Causas probables
41698, Error de RMQ - Uso defectuoso de una
instrucción
El mismo tipo de dato se utiliza en dos instrucciones arg con
Descripción
Acciones recomendadas
Tarea: arg.
Se requiere una identidad de interrupción única para cada tipo
La instrucción arg sólo puede usarse en el nivel normal, no en
de dato al solicitar y activar interrupciones para un tipo de dato
una rutina TRAP ni una rutina de servicio.
concreto.
dos identidades de interrupción diferentes.
Ref. de programa arg.
La ejecución del programa se detendrá inmediatamente.
41701, Error de RMQ - No hay ningún mensaje a
recoger
Causas probables
Descripción
Instrucción arg utilizada en un nivel incorrecto.
Tarea: arg.
Consecuencias
Fallo en la instrucción arg. No había ningún mensaje a recoger.
Acciones recomendadas
Utilice la instrucción en el nivel normal.
Ref. de programa arg.
Consecuencias
41699, Error de RMQ - Sobrepasado el tamaño
máximo del mensaje
No se ha recogido ningún mensaje.
Descripción
Esto puede ocurrir si se produce una caída de alimentación
Tarea: arg.
entre que se ordenó la rutina TRAP y se ejecutó la instrucción
El tamaño de los datos de arg sobrepasa el tamaño máximo.
arg. Uso múltiple de arg en una rutina TRAP. Uso de arg en
Ref. de programa arg.
una rutina TRAP que se ejecuta sin ningún mensaje nuevo en
Causas probables
la cola de RMQ.
Consecuencias
Acciones recomendadas
El mensaje no se enviará.
Recuperación: arg.
Causas probables
Intentando enviar mensajes más grandes de lo permitido. El
cliente de destino no está configurado para recibir el tamaño
del mensaje enviado.
41702, Error de RMQ - arg no válido
Descripción
Tarea: arg.
Acciones recomendadas
Cambie el tamaño de la cola de RMQ para el destinatario o
Uso de datos no válidos en el argumento arg.
Ref. de programa arg.
envíe mensaje más pequeños.
Recuperación:arg.
Consecuencias
La ejecución del programa se detendrá inmediatamente.
41700, Error de RMQ - Fallo de configuración de
interrupción
Causas probables
Descripción
La variable sólo ha sido inicializada, pero sin copiar ningún
Tarea: arg.
dato válido a la variable.
No es posible utilizar dos identidades de interrupción diferentes
Acciones recomendadas
para el mismo tipo de dato en la instrucción arg. Cada tipo de
Compruebe el programa de RAPID.
Uso de una variable arg que no contiene ningún dato válido.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
323
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41703, Error de RMQ - Imposible copiar datos
Causas probables
El cliente que debe recibir el mensaje no está interesado en
Descripción
recibir datos del tipo de dato especificado. El mensaje ha sido
Tarea: arg.
El tipo de dato arg sobrepasa el tamaño máximo admitido por
la cola de RMQ configurada para la arg.
Ref. de programa arg.
desechado. El cliente ha recibido el mensaje y ha enviado en
la respuesta un tipo de dato que no coincide con el tipo de dato
especificado en arg en la instrucción arg. El cliente ha recibido
el mensaje. La respuesta está retardada, de forma que el tiempo
Consecuencias
límite de la instrucción arg ha caducado.
No se ha recibido ningún mensaje.
Acciones recomendadas
Causas probables
Compruebe el programa cliente. Incremente el tiempo de espera
La cola de RMQ de la tarea destinataria no está configurada
de la instrucción arg. Recuperación: arg.
para el tamaño de los datos enviados. El cliente remitente ha
enviado datos más grandes que el tamaño de la cola de RMQ
41706, Error de RMQ - Tiempo máximo caducado
que la tarea arg puede recibir.
Descripción
Acciones recomendadas
Tarea: arg.
Incremente el tamaño de la cola RMQ para la tarea arg.
O bien, envíe menos datos.
El tiempo de espera programado ha caducado.
Ref. de programa arg.
Recuperación: arg.
Consecuencias
41704, Error de RMQ - Cola completa
No se ha recibido ningún mensaje.
Causas probables
Descripción
Se ha agotado el tiempo límite de la instrucción arg.
Tarea: arg.
El cliente llamado arg no puede recibir más mensajes.
Acciones recomendadas
Ref. de programa arg.
Aumente el tiempo de espera de la instrucción arg.
Recuperación: arg.
Consecuencias
El mensaje enviado será descartado.
41707, Error de RMQ - Instrucción no válida en
el modo actual
Causas probables
El cliente no recibe al mismo ritmo al que envía mensajes el
remitente. Si utiliza la instrucción arg, es posible que necesite
un tiempo de espera entre cada instrucción arg.
Descripción
Tarea: arg.
arg sólo se permite si la cola de RMQ está configurada en el
Acciones recomendadas
modo arg.
El cliente debe recibir los mensajes para dejar espacio libre
Ref. de programa: arg.
para los nuevos mensajes.
O bien, el remitente debe limitar el número de mensajes
Consecuencias
La ejecución del programa se detendrá inmediatamente.
enviado.
Causas probables
Recuperación: arg.
La cola de RMQ está configurada en el modo arg.
41705, Error de RMQ - Tiempo máximo caducado
Acciones recomendadas
Descripción
Cambie la configuración de la cola de RAPID Message Queue
Tarea: arg.
de arg al modo arg o utilice una instrucción permitida en el
El tiempo de espera programado se ha agotado.
modo actual.
Ref. de programa arg.
41708, Error de RMQ - Mensaje no válido
Consecuencias
No existe ninguna garantía de que el mensaje haya llegado al
Descripción
cliente.
Tarea: arg.
Continúa en la página siguiente
324
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
El mensaje de RMQ recibido no era válido.
Consecuencias
Ref. de programa: arg.
El sistema pasa al estado bloqueado y no puede ser reiniciado
antes de trasladar el puntero de programa a una posición
Consecuencias
El mensaje de RMQ recibido se ha desechado.
arbitraria.
Causas probables
Causas probables
El mensaje de RMQ recibido contenía daños en el encabezado
Se ha producido un apagado o un reinicio del controlador
durante la gestión de un error de proceso.
o la parte de datos.
Acciones recomendadas
Acciones recomendadas
No reinicie nunca el controlador durante la gestión de un error
Recuperación: arg.
de proceso. Si se requiere un reinicio, traslade primero el PP
41711, El valor no es un porcentaje
a Main en todas las tareas para restablecer el error de proceso.
Descripción
41715, Dirección no válida
Tarea: arg.
El valor del argumento arg no es un porcentaje válido.
Descripción
Tarea: arg.
Ref. de programa: arg.
El argumento arg debe ser CSS_X, CSS_Y, CSS_Z, CSS_XY,
Acciones recomendadas
CSS_XZ, CSS_YZ, CSS_XYZ, CSS_XYRZ.
Compruebe que el valor esté en el rango de 0 a 100.
Ref. de programa: arg.
Acciones recomendadas
41712, Error de argumento
Compruebe el valor de arg.
Descripción
Tarea: arg.
41716, Dirección de offset no válida
El dato de herramienta arg ha sido definido pero ya no está
Descripción
disponible en el sistema.
Tarea: arg.
Ref. de programa: arg.
El argumento arg debe ser CSS_POSX, CSS_NEGX,
Causas probables
CSS_POSY, CSS_NEGY, CSS_POSZ, CSS_NEGZ.
Es posible que el dato de herramienta haya sido definido en
Ref. de programa: arg.
un módulo que ya no está disponible en el sistema.
Acciones recomendadas
41713, Error de argumento
Compruebe el valor de arg.
Descripción
41717, Valor demasiado bajo
Tarea: arg.
El dato de objeto de trabajo arg ha sido definido pero ya no
Descripción
Tarea: arg.
está disponible en el sistema.
El valor del argumento arg es demasiado bajo.
Ref. de programa: arg.
Ref. de programa: arg.
Consecuencias
Es posible que el dato de objeto de trabajo haya sido definido
en un módulo que ya no está disponible en el sistema.
41714, Demasiados eventos de error
Acciones recomendadas
Incremente el valor de arg.
41718, Dimensiones no válidas
Descripción
Descripción
La ejecución de la tarea arg se ha detenido. Hay demasiados
eventos de error no gestionados en la cola. El sistema no puede
gestionar un evento de error cada vez.
Tarea: arg.
La dimensión arg en el símbolo buscado es incompatible con
la dimensión arg en el argumento.
Ref. de programa: arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
325
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Una dimensión '{0}' significa que el símbolo indicado no es de
El dispositivo de E/S arg no puede activarse. La red arg
matriz.
presenta un estado de error.
Ref. de programa: arg.
Acciones recomendadas
Recuperación: arg.
Consecuencias
El dispositivo arg no pudo ser activado.
41719, Parámetro no válido
Causas probables
Descripción
La red presenta un estado de error.
Tarea: arg.
Acciones recomendadas
El símbolo del argumento arg es una matriz de un parámetro.
Recuperación:arg.
Las matrices de parámetros no se aceptan en
SetDataVal/GetDataVal.
41724, El objeto de trabajo actual no es válido
Ref. de programa: arg.
Descripción
41720, Trayectoria fuera del punto de paro
Tarea: arg.
La activación de Cartesian Soft Servo no se permite con un
Descripción
objeto de trabajo móvil. Sólo se permite una base de
Tarea: arg.
coordenadas de usuario programada.
La trayectoria no está completa en las tareas siguientes: arg.
Ref. de programa: arg.
Asegúrese de que la tarea esté ejecutándose.
Ref. de programa: arg.
41725, Ajustes de configuración no válidos
Causas probables
Descripción
La tarea no está en funcionamiento, el movimiento ha parado
o hay un movimiento que usa baja velocidad.
Tarea: arg.
Los parámetros de configuración de Cartesian Soft Servo no
Acciones recomendadas
son válidos.
Recuperación: arg.
La combinación actual puede dar lugar a un comportamiento
inestable.
41721, Argumento no válido
Ref. de programa arg.
Descripción
Acciones recomendadas
Tarea: arg.
Cambie la configuración de Cartesian Soft Servo.
El tipo arg del argumento arg no es válido.
41726, Acciones StopMoveReset omitidas por la
tarea
Ref. de programa: arg.
Acciones recomendadas
Cambie el tipo a uno válido (arg).
Descripción
Tarea: arg.
41722, Valor demasiado alto
La instrucción StopMoveReset no ha afectado de ninguna forma
al sistema.
Descripción
Ref. de programa: arg.
Tarea: arg.
El valor del argumento arg es demasiado alto. El valor debe
Consecuencias
estar entre arg y arg.
La instrucción StopMove no fue reseteada.
Ref. de programa: arg.
Causas probables
La tarea de movimiento no ha sido detenida. La tarea de
41723, La red presenta un estado de error
movimiento fue detenida por otra tarea sin movimiento: arg.
En esta ocasión la causa fue arg.
Descripción
Tarea: arg.
Continúa en la página siguiente
326
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
Acciones recomendadas
Utilice el modificador \AllMotionTasks en StopMoveReset si
Defina la señal en los parámetros del sistema.
desea que esta instrucción resetee a una instrucción StopMove
41732, Se utilizaron demasiados disparos
de otra tarea sin movimiento.
41727, El tamaño no puede representarse en un
num
Descripción
Tarea: arg.
Se configuraron demasiados disparos para la instrucción arg.
Descripción
El límite es arg.
Tarea: arg.
Ref. de programa arg.
Al utilizar la instrucción arg para leer el tamaño del sistema de
archivos, se detectó que el valor es demasiado grande como
Consecuencias
La ejecución del programa se detendrá inmediatamente.
para guardarlo en un num.
Acciones recomendadas
Ref. de programa:arg.
Elimine algunas de las acciones de disparo de la instrucción
Consecuencias
arg.
No es posible leer el tamaño.
41738, Se requiere la opción Wrist Interpolation
Causas probables
El valor no puede representarse en un num.
Descripción
Acciones recomendadas
Tarea: arg.
Utilice un modificador para especificar otra unidad en la que
La instrucción arg se utiliza con un modificador que requiere
mostrar el tamaño.
la opción Wrist Interpolation.
Recuperación: arg.
Ref. de programa arg.
41730, La señal sobrepasa el número máximo de
bits permitidos
Consecuencias
La ejecución del programa se detendrá inmediatamente.
Causas probables
Descripción
Falta una opción de Robotware.
Tarea: arg.
La señal arg es demasiado grande. Si utiliza señales de más
de 23 bits, utilice el tipo de dato triggiosdnum, que acepta
señales de hasta 32 bits.
Acciones recomendadas
No utilice ninguno de los modificadores siguientes: arg.
41739, Se requiere StorePath
Ref. de programa arg.
Acciones recomendadas
Descripción
Las señales de grupo pueden tener 23 bits o menos si se utiliza
Tarea: arg.
el tipo de dato triggios en la instrucción arg.
La instrucción arg se está ejecutando en un gestor de errores
o una rutina TRAP. Utilice arg antes de usar una instrucción
41731, Nombre de la señal no definido
de movimiento en un nivel distinto del nivel de base.
Ref. de programa arg.
Descripción
Causas probables
Tarea: arg.
La señal arg es desconocida en el sistema.
Una instrucción de movimiento se ha ejecutado sin tener la
trayectoria almacenada.
Ref. de programa arg.
Acciones recomendadas
Consecuencias
La ejecución del programa se detendrá inmediatamente.
Ejecute arg antes de usar la instrucción de movimiento arg.
Consulte Ejemplos de tipos de programación en el Manual de
Causas probables
RAPID para conocer cómo debe usar las instrucciones de
La señal debe estar definida en los parámetros del sistema.
movimiento en rutinas TRAP o gestores de errores.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
327
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41740, Fallo de identificación de carga
41743, División entre cero
Descripción
Descripción
Tarea: arg.
Tarea: arg.
¡AVISO!
División entre cero.
No es posible identificar la masa de arg porque el peso es
Ref. de programa arg.
demasiado reducido para la identificación automática de la
carga.
Consecuencias
El cálculo devolverá un error.
Ref. de programa arg.
Causas probables
Acciones recomendadas
División entre cero.
Realice una estimación manual de la carga real y edite
manualmente el programa de RAPID.
Acciones recomendadas
Recuperación: arg.
41741, Desbordamiento de cálculo
41744, Error de instrucción
Descripción
Descripción
Tarea: arg.
El resultado del cálculo no está dentro del rango de 0 a
Tarea: arg.
El programa está ejecutando un gestor de ERROR. No se
4.294.967.295.
permite ejecutar la instrucción arg en un gestor de ERROR.
Ref. de programa arg.
Ref. de programa arg.
Consecuencias
Acciones recomendadas
El cálculo devolverá un error.
Elimine la instrucción.
Causas probables
Los valores de la operación son probablemente demasiado
41745, Error de instrucción
grandes.
Descripción
Acciones recomendadas
Tarea: arg.
Recuperación: arg.
El programa está ejecutando un gestor de ejecución hacia atrás.
No se permite ejecutar la instrucción arg en un gestor de
41742, Resta negativa
ejecución hacia atrás.
Descripción
Ref. de programa arg.
Tarea: arg.
Acciones recomendadas
El resultado de una resta es negativo.
Elimine la instrucción.
Ref. de programa arg.
41746, Error de instrucción
Consecuencias
El cálculo devolverá un error.
Descripción
Causas probables
Tarea: arg.
El primer operando de la resta es más pequeño que el segundo
El programa se está ejecutando en el nivel USUARIO, es decir,
operando.
en una rutina de evento o una rutina de servicio. No se permite
Acciones recomendadas
ejecutar la instrucción arg en el nivel USUARIO.
Asegúrese de que el primer operando sea mayor que el
Ref. de programa arg.
segundo en el momento de la resta.
Acciones recomendadas
Recuperación: arg.
Elimine la instrucción.
Continúa en la página siguiente
328
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41747, Señal de proceso desactivada
Causas probables
El sistema ha interpretado la expresión como un tipo de dato
Descripción
num y el valor es superior al valor entero máximo para un num
Tarea: arg.
La señal de proceso arg está desactivada (0).
Ref. de programa arg.
(valor 8388608). El sistema ha interpretado la expresión como
un tipo de dato dnum y el valor es superior al valor entero
máximo para un dnum (valor 4503599627370496).
Consecuencias
Se genera un error recuperable ERR_PROCSIGNAL_OFF.
Acciones recomendadas
Compruebe y cambie el valor.
Causas probables
El nombre del parámetro arg puede proporcionarle información
Se ha utilizado el argumento opcional \ProcSignal para la
acerca de cómo el sistema interpretó los datos entrantes.
instrucción ProcerrRecovery. La señal hace posible que el
usuario active o desactive la instrucción ProcerrRecovery.
Acciones recomendadas
41751, Error de tamaño de matriz
Descripción
Añada un gestor de errores para el error
ERR_PROCSIGNAL_OFF o elimine el argumento opcional
\ProcSignal de la llamada a la función.
Tarea: arg.
La matriz arg no tiene un tamaño suficiente para contener un
número arg de elementos.
Ref. de programa arg.
41748, Error de valor
Consecuencias
Descripción
La ejecución del programa se detendrá inmediatamente.
Tarea: arg.
Acciones recomendadas
Valor no válido en el argumento arg.
Cambie el tamaño de la matriz para que quepan todos los
Ref. de programa arg.
elementos.
Acciones recomendadas
Compruebe el programa de RAPID.
41752, Error de límite de número
Recuperación: arg.
Descripción
Tarea: arg.
41749, Error de valor
El valor del parámetro arg está fuera de límites.
Descripción
Ref. de programa arg.
Tarea: arg.
El valor del parámetro arg está fuera de límites.
Ref. de programa: arg.
Causas probables
Acciones recomendadas
Recuperación: arg.
41753, Nivel de trayectoria no válido
El valor es demasiado grande.
Descripción
Acciones recomendadas
Tarea: arg.
Utilice un valor más pequeño para arg.
Recuperación: arg.
Ref. de programa arg arg requiere que el robot funcione en el
primer nivel de trayectoria.
Consecuencias
41750, Valor no permitido
La ejecución del programa se detendrá inmediatamente.
Descripción
Causas probables
Tarea: arg.
Ejecución de arg en un nivel de trayectoria erróneo.
Valor no válido en el argumento arg.
Acciones recomendadas
Ref. de programa arg.
Compruebe el programa de RAPID.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
329
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41754, Grabadora de trayectorias borrada
Ref. de programa arg.
Descripción
Consecuencias
Tarea: arg.
La ejecución del programa se detendrá inmediatamente.
¡AVISO!
Acciones recomendadas
La grabadora de trayectorias se ha borrado. La trayectoria
Aumente el tamaño de la matriz arg.
almacenada se borra antes de realizar la identificación de
fricción.
41759, La señal sobrepasa el número máximo de
bits permitidos
Ref. de programa arg.
41755, Tiempo de trayectoria demasiado largo
Descripción
Tarea: arg.
Descripción
La señal arg es demasiado grande.
Tarea: arg.
Ref. de programa arg.
El tiempo de ejecución es excesivo para el ajuste de la fricción.
arg > arg, que es el tiempo máximo en segundos.
Ref. de programa arg.
Acciones recomendadas
Las señales de grupo que contengan 23 bits o menos pueden
usarse en las sentencias IF y ser asignadas al tipo de dato
Consecuencias
num.
La ejecución del programa se detendrá inmediatamente.
Las señales de grupo que contengan de 24 a 32 bits no pueden
Acciones recomendadas
usarse en las sentencias IF. Utilice en su lugar las funciones
Aumente la velocidad o reduzca la longitud de la trayectoria.
arg o arg.
41756, Falta FricIdInit
41760, arg en el modo sincronizado
Descripción
Descripción
Tarea: arg.
Tarea: arg.
arg debe ejecutarse antes que arg.
arg no puede usarse junto con el movimiento sincronizado.
Ref. de programa arg.
Ref. de programa: arg.
Consecuencias
Consecuencias
La ejecución del programa se detendrá inmediatamente.
La ejecución del programa se detendrá inmediatamente.
Acciones recomendadas
41757, Unidad mecánica no encontrada
Descripción
Tarea: arg.
No se encuentra la unidad mecánica arg.
Elimine cualquier SyncMoveOn existente entre arg y arg.
41762, El valor de la cadena de argumento no es
válido
Ref. de programa arg.
Descripción
Consecuencias
Tarea: arg.
La ejecución del programa se detendrá inmediatamente.
La cadena de argumento arg no es válida y no puede ser
convertida.
Acciones recomendadas
Ref. de programa: arg.
Especifique otra unidad mecánica.
Consecuencias
41758, Matriz demasiado pequeña
La ejecución del programa se detendrá inmediatamente.
Causas probables
Descripción
Los únicos caracteres alfabéticos válidos son de a-f y A-F y
Tarea: arg.
La matriz utilizada es demasiado pequeña.
El tamaño de la matriz arg debe ser igual a arg, el número de
sólo para HexToDec. Ni el carácter ., - ni + son válidos para
HexToDec. El carácter - no es válido para DecToHex. El valor
no es un entero válido.
ejes del robot.
Continúa en la página siguiente
330
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
Recuperación: arg.
Edite la cadena de valor de argumento de forma que sea válida
41766, La precisión se perderá.
y pueda ser convertida.
41763, El valor de la cadena de argumento es
demasiado alto
Descripción
Tarea: arg.
Se usa el argumento opcional arg y el grupo de señales tiene
Descripción
arg bits. Esto puede provocar una pérdida de precisión en la
Tarea: arg.
variable utilizada en el argumento opcional arg.
El valor de la cadena de argumento arg sobrepasa el valor
Ref. de programa arg.
máximo admitido en el sistema.
Consecuencias
Ref., de programa: arg.
La ejecución del programa se detendrá inmediatamente.
Consecuencias
Causas probables
La cadena de valor del argumento se convierte pero ha sido
cambiada al valor máximo admitido (9223372036854775807).
Se usa el argumento arg y existe riesgo de pérdida de la
precisión del valor.
Causas probables
Los grupos de señales que se componen de 23 bits o menos
El valor de la cadena de argumento sobrepasa el valor máximo
pueden representarse con el tipo de dato num y los grupos de
admitido.
32 bits o menos pueden representarse con el tipo de dato dnum,
si se utilizan en un programa RAPID.
Acciones recomendadas
Edite la cadena de valor del argumento para que no sobrepase
Acciones recomendadas
el valor máximo admitido.
Para evitar la pérdida de precisión de la variable usada en arg,
utilice en su lugar el argumento opcional arg.
41764, Combinación incorrecta en arg
41767, Error de instrucción
Descripción
Tarea: arg.
Descripción
Al utilizar una instrucción arg, no es posible añadir una
Tarea: arg.
variable/persistente dnum a una variable/persistente num.
La instrucción arg se usa desde una tarea sin movimiento y la
Ref. de programa: arg.
tarea de movimiento a la que está conectada la tarea arg no
controla el TCP del robotTCP.
Causas probables
El valor añadir es del tipo dnum y la variable/persistente que
debe cambiarse es de tipo num.
Ref. de programa arg.
Consecuencias
La ejecución del programa se detendrá inmediatamente.
Acciones recomendadas
Encontrará más información acerca de arg en el Manual de
Causas probables
referencia de RAPID.
Se utiliza arg en una tarea sin movimiento que está conectada
a una tarea de movimiento que no controla el TCP del robot.
41765, El valor del argumento es demasiado alto
Acciones recomendadas
Descripción
Compruebe la configuración. La instrucción debe eliminarse.
Tarea: arg.
La tarea sin movimiento arg está conectada a una tarea de
Valor demasiado alto en el argumento arg.
movimiento que no controla ningún el TCP del robot.
Ref. de programa arg.
41768, Falta un modificador
Causas probables
El valor del argumento sobrepasa el valor máximo admitido.
Descripción
(arg).
Tarea: arg.
El modificador arg es obligatorio al ejecutar la instrucción o
Acciones recomendadas
función.
Reduzca el valor del argumento arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
331
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Ref. de programa arg.
Causas probables
CamConnect ya se ha ejecutado para el cameradev
Consecuencias
La ejecución del programa se detendrá inmediatamente.
especificado.
Acciones recomendadas
Acciones recomendadas
Añada el modificador al utilizar la instrucción o función.
Desconecte la cámara si debe usarse el cameradev actual, o
bien utilice otro cameradev.
41769, Datos de servicio no encontrados
Recuperación: arg.
Descripción
41772, Error de parámetro
Tarea: arg.
No se encuentran los datos de servicio de la unidad mecánica
Descripción
Tarea: arg.
arg.
Ninguno de los argumentos opcionales enumerados a
Ref. de programa arg.
continuación se ha especificado en la instrucción.
Consecuencias
Ref. de programa: arg.
No se ha leído ningún dato de servicio.
Falta uno de estos argumentos opcionales:
Causas probables
arg
Estos datos de servicio no están presentes para esta unidad
arg
mecánica.
arg.
Acciones recomendadas
Consecuencias
Compruebe que los datos de servicio especificados estén
La ejecución del programa se detendrá inmediatamente.
definidos para la unidad mecánica.
Acciones recomendadas
41770, Error de acceso a cámara
Especifique al menos uno de los argumentos.
41773, La cámara denominada arg no es válida
Descripción
Tarea: arg.
Descripción
El dispositivo cameradev debe estar conectado a una cámara
configurada para poder utilizarlo.
Tarea: arg.
La cámara arg es desconocida para el sistema.
Ref. de programa arg.
Compruebe que se esté utilizando el nombre de una cámara
Causas probables
configurada.
El dispositivo cameradev no está conectado a ningún nombre
Ref. de programa: arg.
de cámara.
Consecuencias
Acciones recomendadas
La ejecución del programa se detendrá inmediatamente.
Inserte un arg en un lugar adecuado del programa antes de
utilizar el dispositivo cameradev.
Causas probables
La cámara usada arg no es un nombre válido de cámara.
Recuperación: arg.
Acciones recomendadas
41771, Ya conectado
Compruebe el nombre de la cámara.
Descripción
41774, Error de tipo
Tarea: arg.
El dispositivo cameradev ya está conectado a la cámara arg y
no puede usarse para la conexión a una nueva cámara.
Descripción
Tarea: arg.
No es posible asignar el valor arg a una variable del tipo actual
Ref. de programa arg.
(arg). Compruebe el argumento opcional utilizado y utilice un
Consecuencias
argumento de un tipo adecuado.
Imposible conectarse a la cámara denominada arg.
Ref. de programa arg.
Continúa en la página siguiente
332
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Causas probables
Consecuencias
Tipo de argumento incorrecto usado.
La ejecución del programa se detendrá inmediatamente.
Acciones recomendadas
Compruebe el programa de RAPID y utilice otro tipo de variable
41779, El parámetro no puede ser modificado
para el almacenamiento de datos.
Descripción
Recuperación: arg.
Tarea: arg.
El parámetro escrito a la cámara arg con la instrucción arg no
41775, Solicitud en curso a una cámara
puede ser modificado; el parámetro no se reconoce o los datos
de RAPID utilizados son de un tipo de dato incorrecto.
Descripción
Ref. de programa arg.
Tarea: arg.
No se permite ejecutar varias solicitudes en paralelo a una
Consecuencias
cámara.
Parámetro no modificado.
Ref. de programa: arg.
Causas probables
Consecuencias
Los motivos son: Se ha utilizado un argumento opcional de
La solicitud no se ejecutó.
RAPID incorrecto. El valor está fuera de rango. No existe
ninguna celda con el nombre especificado. Las celdas deben
Causas probables
Existe más de una solicitud a la cámara denominada arg.
ser del tipo EditInt, EditFloat o EditString. Se está intentando
establecer un tipo incorrecto en la celda, por ejemplo un valor
Acciones recomendadas
de cadena en un parámetro que no es una cadena.
Espere unos instantes e inténtelo de nuevo.
Acciones recomendadas
Recuperación: arg.
Compruebe el programa de RAPID y utilice un argumento
41776, No hay más datos disponibles
opcional que tenga el tipo de dato correcto y un valor dentro
del intervalo admitido.
Descripción
Recuperación: arg.
Tarea: arg.
No hay más datos disponibles para la cámara arg.
Ref. de programa: arg.
Consecuencias
41780, La cámara no está en modo de
funcionamiento
Descripción
No se pudo leer ningún dato.
Tarea: arg.
Acciones recomendadas
La operación falló porque la cámara arg no se encuentra en
Recuperación: arg.
modo de funcionamiento.
Ref. de programa: arg.
41777, La cámara no está conectada
Consecuencias
La ejecución del programa se detendrá inmediatamente.
Descripción
Tarea: arg.
41781, Cámara en modo de funcionamiento
La cámara arg no está conectada.
Ref. de programa: arg.
Descripción
41778, Imposible cargar el trabajo
Tarea: arg.
La operación falló porque la cámara arg se encuentra en modo
Descripción
de funcionamiento.
Tarea: arg.
Ref. de programa: arg.
Imposible cargar el trabajo denominado arg para la cámara arg.
Consecuencias
Ref. de programa: arg.
La ejecución del programa se detendrá inmediatamente.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
333
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41782, La cámara no lo admite
Consecuencias
La ejecución del programa se detiene inmediatamente.
Descripción
Tarea: arg.
Causas probables
La operación falló porque la cámara no admite la acción actual
Al usar el argumento opcional \AwaitComplete, el ajuste Trigger
(se utilizó el modificador arg).
del trabajo de cámara debe tener el valor External. La cámara
Ref. de programa: arg.
debe ser cambiada al Modo de ejecución. La cámara no tiene
ningún trabajo cargado.
Consecuencias
La ejecución del programa se detendrá inmediatamente.
Acciones recomendadas
Vaya a RobotStudio -> pestaña Integrated Vision -> Configurar
Causas probables
Se intentó cambiar en la cámara un valor que no admite.
Acciones recomendadas
imagen, cambie la propiedad Trigger a External y guarde el
trabajo. Ejecute la instrucción CamSetRunMode. Cargue un
trabajo en la cámara. Recuperación: arg.
Compruebe qué parámetros admite la cámara.
41786, Parámetro fuera de rango
41783, Tiempo límite de comunicación
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El valor utilizado para el parámetro arg de la cámara arg está
Se agotó el tiempo límite de la comunicación con la cámara
fuera de rango.
arg.
Ref. de programa: arg.
Ref. de programa arg.
Consecuencias
Consecuencias
La ejecución del programa se detendrá inmediatamente.
La cámara se encuentra en un estado no definido. La orden
enviada a la cámara puede haberse realizado o no.
Causas probables
Causas probables
No es posible establecer el valor del parámetro.
Acciones recomendadas
La cámara no responde.
Compruebe el valor utilizado.
Acciones recomendadas
Compruebe la conexión entre la cámara y el controlador.
41787, El parámetro no puede ser leído
Reinicie la cámara e inténtelo de nuevo.
Descripción
Recuperación: arg.
Tarea: arg.
41784, Error de comunicación
El parámetro arg no puede ser leído o reconocido.
Ref. de programa arg.
Descripción
Causas probables
Tarea: arg.
Error de comunicación con la cámara arg. Es probable que la
cámara esté desconectada.
No es posible acceder al parámetro. No existe ningún parámetro
con el nombre especificado.
Acciones recomendadas
Ref. de programa arg.
Compruebe que el nombre arg sea un nombre correcto.
Acciones recomendadas
Recuperación: arg.
Recuperación: arg.
41785, Imposible solicitar una imagen
41790, No hay resultados en la imagen
Descripción
Descripción
Tarea: arg.
Tarea: arg.
Imposible solicitar una imagen de la cámara arg.
Ref. de programa: arg.
Se ha adquirido una imagen con la cámara arg, pero la salida
no contenía ningún resultado.
Ref. de programa arg.
Continúa en la página siguiente
334
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41792, Instrucción no permitida.
Causas probables
La pieza no está presente, no está lo suficientemente visible o
no es detectable por otros motivos en el campo de visión de
la cámara. La configuración de Salida a RAPID no está realizada
correctamente.
Descripción
Tarea: arg.
La instrucción arg sólo puede ejecutarse en el nivel normal en
una tarea de movimiento.
Acciones recomendadas
Compruebe lo siguiente y adquiera una nueva imagen: Verifique
que la pieza esté en el campo de visión. Compruebe que los
Consecuencias
La ejecución del programa se detendrá.
ajustes de imagen y de la herramienta de visión contenidos en
Causas probables
el trabajo de visión activo sean correctos. Verifique que la
La instrucción arg se utiliza desde una rutina TRAP o una tarea
iluminación no haya cambiado desde que se configuró el trabajo
en segundo plano.
de visión. Verifique que las salidas de visión deseadas estén
configuradas en RobotStudio -> pestaña Integrated Vision ->
Salida a RAPID. Recuperación: arg.
41793, Error de paro de TriggInt
Descripción
No es posible almacenar más acciones de reinicio de trigs.
41791, No se permite SoftMove con una masa
cero.
Las instrucciones que pueden provocar este problema son:
Descripción
Consecuencias
Tarea: arg.
La ejecución del programa se detendrá inmediatamente.
Los datos de carga actuales usados al llamar a CSSAct tienen
una masa de arg Kg. SoftMove necesita tener una definición
de carga exacta. Esto se define normalmente a través de la
definición de carga que forma parte de la definición de la
herramienta.
arg.
Causas probables
Al usar instrucciones de movimiento que utilizan interrupciones
en una posición especificada de la trayectoria de movimiento
del robot y si los eventos recibidos tras un paro son más
numerosos que los que el sistema puede gestionar, este error
Ref. de programa: arg.
detiene la ejecución.
Consecuencias
Cuando SoftMove detecta una masa inferior o igual a 0,001 Kg,
no permite la activación.
Por tanto, no es posible ejecutar la instrucción CSSAct con
tool0.
Causas probables
Acciones recomendadas
Intente aumentar la duración de los movimientos o reduzca la
velocidad del movimiento como posible solución a este
problema.
41794, Error de búsqueda
La herramienta actual al ejecutar la instrucción CSSAct es tool0
u otra herramienta con una masa demasiado pequeña. La
herramienta actual es definida por una instrucción de
movimiento o por un movimiento manual anterior a la
Descripción
Tarea: arg.
La instrucción de búsqueda arg ha detectado que la trayectoria
y el objeto de búsqueda se han eliminado.
instrucción CSSAct.
Ref. de programa: arg.
Acciones recomendadas
Use una definición de herramienta lo más exacta posible. Use
Consecuencias
La posición no puede ser leída por la instrucción arg. La
la identificación de carga.
Si se realizan pruebas sencillas de SoftMove sólo con la brida
ejecución del programa se detendrá inmediatamente.
de montaje como herramienta, es necesario crear una definición
Causas probables
de herramienta similar a tool0, pero con una masa superior a
Una rutina TRAP ejecuta una instrucción arg justo antes del
0,002 Kg.
cambio de señal. Una rutina TRAP ejecuta una instrucción arg,
y cuando la instrucción arg está preparada (no se produce
ninguna detección de señal), arg detecta que el objeto de
búsqueda ha sido eliminado.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
335
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
E/S no es válida. El dispositivo de E/S no está en
Utilice la gestión de errores con un salto largo en la rutina TRAP
funcionamiento. Error en la configuración de la señal de E/S.
para distanciarse de la instrucción arg o reescriba el programa
de RAPID. Consulte la documentación de la instrucción arg
Acciones recomendadas
Recuperación:arg.
para más información acerca de cómo implementar la gestión
de errores con un salto largo.
41798, No se encontró ningún TCP de robot
41795, Modo de carga útil incorrecto
Descripción
Tarea: arg.
Descripción
Esta tarea no controla una unidad mecánica que es un robot
Tarea: arg.
de TCP.
Modo de carga útil incorrecto.
Ref. de programa arg.
Ref. de programa arg.
Consecuencias
Consecuencias
La ejecución del programa se detendrá inmediatamente.
La ejecución del programa se detendrá inmediatamente.
Causas probables
Causas probables
No se encontró ningún TCP de robot para esta tarea.
Si se usa el argumento opcional \TLoad en una instrucción de
movimiento, el parámetro de configuración ModalPayloadMode
debe cambiarse a NO. Si se usa la instrucción GripLoad, el
parámetro de configuración ModalPayloadMode debe cambiarse
a SÍ. Si se usa la instrucción LoadId y el parámetro de
configuración ModalPayloadMode tiene el valor NO, la
identificación de PayLoad no es posible.
Acciones recomendadas
Compruebe el programa de RAPID. La instrucción arg sólo
puede usarse en una tarea de RAPID que controle un robot de
TCP.
41799, Valor de velocidad demasiado bajo
Acciones recomendadas
Descripción
Compruebe el valor del parámetro de configuración
Tarea: arg.
ModalPayLoadMode del dominio SYS, tipo SYS_MISC.
El valor de velocidad (arg) utilizado en el argumento arg es
demasiado bajo.
Ref. de programa arg.
41796, Error de argumento
Consecuencias
Descripción
No es posible utilizar el valor de velocidad actual.
Tarea: arg.
La masa es negativa en los loaddata utilizados.
Causas probables
Ref. de programa arg.
Se ha utilizado un valor que está por debajo del valor mínimo
de velocidad.
Acciones recomendadas
Realice la definición de carga ocrrecta para la carga antes de
Acciones recomendadas
usarla para desplazamientos o movimientos del programa. La
Incremente el valor de velocidad del argumento arg.
identificación de la carga puede hacerse con la rutina de
Recuperación: arg.
servicio LoadIdentify.
41800, Se requiere una acción manual
41797, Señal no accesible
Descripción
Descripción
Tarea: arg.
Tarea: arg.
Se ha ordenado el inicio de los movimientos del robot desde
No es posible acceder a la señal de E/S arg.
la tarea arg.
Ref. de programa arg.
Se requiere la activación del dispositivo de habilitación cuando
se funciona en el modo manual a velocidad reducida o el modo
Causas probables
El motivo de este error es uno de los siguientes: La entrada o
manual a velocidad total.
salida real del dispositivo de E/S representada por la señal de
Continúa en la página siguiente
336
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Causas probables
la señal analógica utilizada en el argumento AOp de la
Se ha ejecutado una orden para activar los movimientos del
instrucción TriggSpeed.
robot en el modo manual velocidad reducida o en el modo
Ref. de programa arg.
manual a velocidad total.
Causas probables
Acciones recomendadas
La salida analógica lógica rebasa el valor de salida físico.
Libere y active de nuevo el dispositivo de habilitación. Inicie
Valor lógico de salida = valor de escala * velocidad programada
de nuevo la ejecución del programa de RAPID.
del TCP en mm/s.
ATENCIÓN: Si se utiliza un sistema MultiMove, todos los robots
Valor de salida físico de la señal analógica = Según la definición
y el eje externo iniciarán sus movimientos después del siguiente
de la configuración de una señal de salida analógica.
inicio de programa.
La señal analógica sólo puede estar entre arg y arg según la
configuración de los parámetros de sistema de E/S.
41801, En modo sincronizado
Acciones recomendadas
Descripción
Reduzca el valor utilizado en ScaleValue o reduzca la velocidad
Tarea: arg.
programada de la instrucción actual.
No es posible ejecutar arg en modo sincronizado.
Otra solución es cambiar el valor configurado para la señal de
Ref. de programa arg.
salida analógica.
Recuperación: arg.
Consecuencias
La ejecución del programa se detendrá inmediatamente.
41810, Sólo se permite para un robot de 6 ejes
Causas probables
El sistema se encuentra en modo sincronizado en el nivel de
trayectoria básica o en el nivel de trayectoria grabada.
Descripción
Tarea: arg.
La instrucción arg con el modificador arg sólo se permite para
Acciones recomendadas
un robot de 6 ejes.
Elimine la sincronización antes de ejecutar la instrucción actual.
41802, Instrucción o función no admitida
Ref. de programa arg.
Consecuencias
La ejecución del programa se detendrá inmediatamente.
Descripción
Causas probables
Tarea: arg.
La instrucción o función de RAPID arg no se admite en esta
Instrucción arg utilizada con el modificador arg.
versión de RobotWare.
Acciones recomendadas
Ref. de programa arg.
Elimine arg o el modificador arg.
Causas probables
Uso de una función o instrucción no admitida en la versión
actual de RobotWare.
41811, No se permite restablecer la señal
Descripción
Tarea: arg.
Acciones recomendadas
Elimine la instrucción o función de RAPID arg de su programa
La instrucción arg solo puede utilizarse para restablecer una
señal que haya sido conectada a una señal configurada con la
de RAPID.
instrucción arg.
Ref. de programa arg.
41803, Error de argumento
Consecuencias
Descripción
La ejecución del programa se detendrá inmediatamente.
Tarea: arg.
El valor de salida lógico calculado por el argumento ScaleValue
Causas probables
de la instrucción TriggSpeed y la velocidad programada en la
La señal con el nombre arg está configurada en la configuración
instrucción actual rebasan el valor de salida físico máximo de
de E/S y no puede restablecerse.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
337
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
Acciones recomendadas
Compruebe el programa de RAPID y el argumento utilizado en
No es posible usar el componente de registro o el elemento de
la instrucción arg.
matriz en el argumento arg.
Solo es posible utilizar variables persistentes completas para
41812, Dominio no válido o sin uso
Descripción
arg.
41815, Error de referencia en bool cíclico
Tarea: arg.
El dominio arg usado en la instrucción arg no es válido o no
Descripción
está en uso.
Tarea: arg.
Ref. de programa arg.
El argumento arg no es válido como condición.
Ref. de programa: arg.
Causas probables
Se ha usado en la instrucción arg un dominio no válido o que
Consecuencias
no está en uso.
La ejecución del programa se detiene inmediatamente.
Acciones recomendadas
Causas probables
Recuperación: arg.
Se ha utilizado un argumento no válido en la parte de condición
de SetupCyclicBool.
41813, Error de acceso a un archivo o directorio
Acciones recomendadas
Descripción
Consulte el manual y sustituya arg por un argumento válido.
Tarea: arg.
Imposible abrir el archivo arg para escritura o el directorio
especificado no existe.
41816, Demasiados bools cíclicos conectados
Descripción
Ref. de programa arg.
Tarea: arg.
Causas probables
Solo se permite configurar arg bools cíclicos.
Es posible que el archivo esté protegido contra escritura.
Es posible que el archivo o el directorio tengan un nombre
incorrecto.
Consecuencias
La ejecución del programa se detendrá inmediatamente.
La condición determinada no se conectará a arg.
El directorio especificado no existe.
No queda espacio de almacenamiento libre en el dispositivo.
Causas probables
Ya se ha configurado el número máximo de bools cíclicos (arg).
Acciones recomendadas
Compruebe si el archivo está protegido contra escritura y, en
ese caso, desactive la protección. Asegúrese de que el nombre
del archivo y el del directorio sean correctos. Asegúrese de
que el directorio exista. Asegúrese de que haya suficiente
espacio de almacenamiento libre. Recuperación: arg.
Acciones recomendadas
Elimine todos los bools cíclicos que no se utilicen de momento
e inténtelo de nuevo.
41817, Error de E/S en bool cíclico
Descripción
41814, Error de referencia
Fallo al evaluar una configuración de expresión lógica con la
instrucción de RAPID SetupCyclicBool.
Descripción
La señal arg es desconocida para el sistema.
Tarea: arg.
La referencia del argumento arg no es una variable persistente
Consecuencias
completa.
La ejecución del programa se detendrá inmediatamente.
Ref. de programa arg.
Causas probables
Consecuencias
Se ha perdido la conexión con el dispositivo de E/S. Si la señal
La ejecución del programa se detendrá inmediatamente.
está definida en el programa de RAPID, debe estar conectada
a la señal configurada con la instrucción AliasIO.
Continúa en la página siguiente
338
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Acciones recomendadas
Acciones recomendadas
Restablezca la conexión con el dispositivo de E/S. Reconecte
Inicialice la identidad de EGM arg mediante la instrucción de
la señal definida por el programa de RAPID con AliasIO.
RAPID EGMGetId.
41818, Error de SDB en bool cíclico
41821, No hay ninguna señal EGM especificada
Descripción
Descripción
Fallo al evaluar una configuración de expresión lógica con la
Tarea: arg.
instrucción de RAPID SetupCyclicBool.
No se especificó ninguna señal de entrada EGM en arg.
La variable persistente arg es desconocida para el sistema.
Ref. de programa arg.
Consecuencias
Consecuencias
La ejecución del programa se detendrá inmediatamente.
La ejecución del programa se detiene inmediatamente.
Causas probables
Causas probables
El módulo que contiene la declaración de arg probablemente
ha sido descargado.
Acciones recomendadas
Es necesario especificar al menos una señal en arg.
Acciones recomendadas
Recargue el módulo que contiene la declaración de arg.
Desconecte la expresión lógica que contiene
RemoveCyclicBool.
41822, Ningún dato del dispositivo UdpUc
Descripción
Tarea: arg.
41819, Error de valor entero en bool cíclico
Descripción
No se ha recibido ningún paquete de datos esperado para la
instancia de EGM arg en arg segundos.
Ref. de RAPID arg.
Fallo al añadir o evaluar una expresión lógica, configurada con
la instrucción de RAPID SetupCyclicBool. La variable
Consecuencias
La ejecución del programa se detiene inmediatamente.
persistente arg no tiene ningún valor entero.
Acciones recomendadas
Consecuencias
Compruebe la conexión entre el controlador y el dispositivo
La ejecución del programa se detiene inmediatamente.
UdpUc "arg". Compruebe que el dispositivo UdpUc "arg"
Causas probables
funciona correctamente. Aumente el valor (arg) de
arg no tiene ningún valor entero.
\CommTimeout en EGMSetupUC. Recuperación:
ERR_UDPUC_COMM.
Acciones recomendadas
Asegúrese de que arg tenga un valor entero.
41823, Tipo de bases de coordenadas no válido
41820, Identidad de EGM no válida
Descripción
Tarea: arg.
Descripción
El tipo de bases de coordenadas arg no se permite junto con
Tarea: arg.
La identidad de EGM arg no es válida.
la instrucción de RAPID arg.
Ref. de programa arg.
Ref. de programa arg.
Consecuencias
Consecuencias
La ejecución del programa se detiene inmediatamente.
La ejecución del programa se detiene inmediatamente.
Acciones recomendadas
Causas probables
La identidad de EGM arg no se había inicializado mediante la
Corrija el tipo de bases de coordenadas utilizado.
instrucción de RAPID EGMGetId.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
339
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41824, Imposible abrir el dispositivo UdpUc
Consecuencias
La ejecución del programa se detiene inmediatamente.
Descripción
No fue posible abrir el dispositivo externo arg, especificado en
Acciones recomendadas
la instrucción de RAPID arg.
Utilice EGM en tareas de RAPID solamente con un robot con
TCP.
Consecuencias
La ejecución del programa se detiene inmediatamente.
41828, Demasiadas instancias de EGM
Acciones recomendadas
Compruebe lo siguiente: El nombre del dispositivo está bien
escrito. El dispositivo está conectado. El dispositivo funciona
Descripción
Tarea: arg.
No hay más instancias de EGM disponibles. El número máximo
correctamente.
por tarea de RAPID es arg.
Ref. de programa arg.
41825, EGM no conectado
Consecuencias
Descripción
El estado de la instancia de EGM con la identidad de EGM arg
La ejecución del programa se detiene inmediatamente.
Acciones recomendadas
no está conectado.
Debe descontar una instancia de EGM mediante EGMReset
Consecuencias
La ejecución del programa se detiene inmediatamente.
Acciones recomendadas
antes de conectar otra.
41829, Error de cambio de estado de EGM
Utilice las instrucciones EGMGetId y/o EGMSetupAI,
EGMSetupAI, EGMSetupGI o EGMSetupUC para conectar EGM.
Para obtener más información, consulte el Manual del usuario
Descripción
El estado de la instancia de EGM con la identidad de EGM arg
no puede cambiarse a arg.
de EGM.
Consecuencias
41826, Error de coincidencia de modo de EGM
La ejecución del programa se detiene inmediatamente.
Descripción
Acciones recomendadas
Existe un error de coincidencia de modo de EGM para la
Pruebe a restablecer la instancia de EGM mediante la
identidad de EGM arg.
instrucción de RAPID EGMReset. Mueva PP a Main para
Es importante utilizar el mismo modo de EGM (Joint o Pose)
restablecer todas las instancias de EGM.
para EGMSetupAI, EGMSetupAO, EGMSetupGI,
EGMSetupUdpUc, EGMActXX y EGMRunXX.
41830, Error al enviar mensaje de UdpUc de EGM
Consecuencias
Descripción
La ejecución del programa se detiene inmediatamente.
No fue posible escribir el mensaje de UdpUc completo al
dispositivo externo arg conectado a EGM.
Acciones recomendadas
Utilice EGMSetupAI, EGMSetupAO, EGMSetupGI y
Se enviaron arg de arg.
EGMSetupUdpUc con el interruptor \Joint junto con
Consecuencias
EGMActJoint y EGMRunJoint.
La ejecución del programa se detiene inmediatamente.
Utilice EGMSetupAI, EGMSetupAO, EGMSetupGI y
EGMSetupUdpUc con el interruptor \Pose junto con
EGMActPose y EGMRunPose.
Acciones recomendadas
Compruebe la conexión entre el controlador y el dispositivo
externo arg. Compruebe la aplicación de servidor de UDP en
el dispositivo externo arg. Reinicie el controlador y/o el
41827, Falta robot con TCP
dispositivo externo arg.
Descripción
No se permite usar EGM en una tarea de RAPID sin un robot
con TCP.
Continúa en la página siguiente
340
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41831, Aviso ContactL
Ref. de programa arg.
Descripción
Consecuencias
Tarea: arg.
La ejecución del programa se detiene inmediatamente.
Ningún impacto durante ContactL.
Acciones recomendadas
Antes de realizar la instrucción siguiente, asegúrese de mover
Defina el dato de disparo ejecutando la instrucción TriggIO,
el TCP a la posición inicial de la trayectoria de ContactL.
TriggInt, TriggEquip, TriggSpeed o TriggCheckIO antes de la
Ref. de programa arg.
instrucción actual.
Consecuencias
Si no se realiza el reposicionamiento antes de reiniciar
ContactL, los movimientos resultantes pueden causar daños.
41841, Error de argumento
Descripción
Acciones recomendadas
Tarea: arg.
Recuperación: arg.
El tamaño de la matriz usada en el argumento arg es de arg.
El tamaño máx. de la matriz está limitado a arg elementos.
41832, El mensaje de entrada de UdpUc de EGM
contiene datos no válidos
Ref. de programaarg.
Descripción
La ejecución del programa se detiene inmediatamente.
La aplicación del servidor de UdpUc en el dispositivo externo
Acciones recomendadas
arg que alimenta EGM con los datos de posición ha enviado
Compruebe y modifique el programa de RAPID.
Consecuencias
datos no válidos.
41842, Error de argumento
Consecuencias
La ejecución del programa se detiene inmediatamente.
Descripción
Acciones recomendadas
Tarea: arg.
Compruebe que la aplicación de servidor de UDP en el
Instrucción arg usada con el argumento arg y uno de los
dispositivo externo arg envía datos de acuerdo con la
argumentos opcionales T2, T3, T4, T5, T6, T7 o T8.
especificación en egm.proto. Compruebe que la aplicación de
Ref. de programa arg.
servidor de UDP en el dispositivo externo arg envía datos aptos
para la unidad mecánica a la que está dirigida.
41833, Datos de entrada de EGM de señales no
válidas
Consecuencias
La ejecución del programa se detendrá inmediatamente.
Causas probables
Se utilizó una combinación no válida de argumentos.
Acciones recomendadas
Descripción
Corrija el programa de RAPID.
La señal arg que alimenta EGM con los datos de posición ha
enviado datos no válidos.
41843, Instrucción no permitida en una rutina
TRAP o de servicio
Consecuencias
La ejecución del programa se detiene inmediatamente.
Descripción
Acciones recomendadas
Tarea:arg.
Compruebe que los datos de entrada de la señal arg envían
datos aptos para la unidad mecánica a la que están dirigidos.
No se permite usar la instrucción de RAPID arg en una rutina
TRAP o de servicio.
Ref. de programa arg.
41840, Error de argumento
Consecuencias
Descripción
La ejecución del programa se detiene inmediatamente.
Tarea: arg.
Acciones recomendadas
No hay ningún dato de disparo válido en el argumento
Elimine la instrucción de su programa de RAPID.
TriggArray.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
341
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41844, Error de búsqueda
41847, La señal no permite la escritura
Descripción
Descripción
Tarea: arg.
Los bits de las señales de E/S son definidos por una operación
La variable persistente arg de la instrucción SearchX ya se ha
de transferencia de dispositivos.
cambiado al valor especificado (alto o bajo) al principio de la
La señal arg es de solo lectura.
búsqueda.
Consecuencias
Antes de realizar la búsqueda siguiente, asegúrese de mover
La ejecución del programa se detiene inmediatamente.
el TCP a la posición inicial de la trayectoria de búsqueda.
Causas probables
Ref. de programa arg.
Los bits de las señales de E/S son definidos por una operación
Consecuencias
de transferencia de dispositivos.
Si no se realiza el reposicionamiento antes de reiniciar una
búsqueda circular, podrían producirse movimientos capaces
Acciones recomendadas
Compruebe la configuración de E/S de las señales de E/S y la
de causar daños.
transferencia de dispositivos.
Acciones recomendadas
Cambie la señal utilizada en el programa de RAPID.
Recuperación: arg.
41845, Error fuera de alcance
41848, Tiempo de visualización demasiado breve
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El tiempo de visualización especificado es demasiado breve.
La posición (robtarget) está fuera del área de trabajo del robot.
Ref. de programa arg.
Ref. de programa arg.
Consecuencias
Causas probables
La ejecución del programa se detiene inmediatamente.
El robtarget utilizado está fuera de alcance.
Acciones recomendadas
Acciones recomendadas
Consulte la documentación de RAPID acerca del tiempo mínimo
Utilice un robtarget que esté dentro del área de trabajo del
robot.
de visualización.
Aumente el tiempo de visualización utilizado en el programa
Recuperación: arg.
de RAPID.
41846, La señal no permite la escritura
Descripción
Tarea: arg.
41849, Mala combinación de valores utilizados
en argumentos
Descripción
Los bits de las señales de E/S son definidos por una operación
de transferencia de dispositivos.
Tarea: arg.
El tiempo de visualización especificado arg es igual o superior
La señal arg es de solo lectura.
al tiempo límite arg de la instrucción.
Ref. de programa arg.
Ref. de programaarg.
Consecuencias
Consecuencias
La ejecución del programa se detiene inmediatamente.
Causas probables
La ejecución del programa se detiene inmediatamente.
Acciones recomendadas
Los bits de las señales de E/S son definidos por una operación
de transferencia de dispositivos.
Cambie el tiempo de visualización utilizado en el programa de
RAPID o cambie el periodo máximo de tiempo de espera
Acciones recomendadas
permitido.
Compruebe la configuración de E/S de las señales de E/S y la
transferencia de dispositivos.
Cambie la señal utilizada en el programa de RAPID.
Continúa en la página siguiente
342
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41850, Interfaz de usuario ya activa
digital, un grupo de señales digitales o una señal analógica de
salida en una posición fija.
Descripción
El error es detectado cuando debe realizarse la configuración
Tarea: arg.
Ya hay un mensaje activo en el FlexPendant. Debe cancelarse
de la señal real.
un mensaje lanzado por la instrucción arg antes de lanzar un
Acciones recomendadas
nuevo mensaje.
Compruebe la configuración de E/S de la señal de E/S.
Ref. de programa arg.
Compruebe el valor de la variable persistente utilizada en arg
para la instrucción o instrucciones de configuración de Trigg.
Consecuencias
El mensaje no se mostrará en el FlexPendant.
Este error puede ser gestionado en un gestor de errores.
41860, Error de evaluación en bool cíclico
Descripción
Causas probables
Ya hay un mensaje arg activo en el FlexPendant.
Fallo al evaluar el bool cíclico arg.
Consecuencias
Acciones recomendadas
La evaluación de arg se ha detenido inmediatamente.
Recuperación: arg.
El mensaje arg actualmente activo puede desactivarse con la
Causas probables
instrucción arg.
El módulo que contiene la declaración de arg ha sido
descargado. Se ha perdido una señal de E/S necesaria para
41851, Tipo de valor utilizado incorrecto
evaluar la expresión lógica conectada a arg (consulte registros
de error anteriores). La señal de E/S actualizada con el bool
Descripción
cíclico se ha perdido.
Tarea: arg.
Tipo de valor incorrecto utilizado en el argumento opcional arg.
Acciones recomendadas
Los únicos tipos válidos son bool, num o dnum, o cualquier
Recargue el módulo que contiene la declaración de arg.
tipo de alias de estos tres tipos básicos.
Restablezca la conexión con el dispositivo de E/S. Reconecte
Ref. de programa arg.
la señal definida por el programa de RAPID con AliasIO.
Consecuencias
La ejecución del programa se detiene inmediatamente.
41861, El bool cíclico se ha eliminado
Descripción
Causas probables
Fallo al evaluar el bool cíclico arg.
Tipo de valor utilizado incorrecto.
Consecuencias
Acciones recomendadas
Cambie el tipo utilizado en el argumento opcional arg.
La evaluación de arg se ha detenido inmediatamente y el bool
cíclico se ha eliminado.
41852, Valor de señal incorrecto para la señal
arg
Causas probables
El módulo que contiene la declaración de arg ha sido
descargado. Se ha perdido una señal de E/S necesaria para
Descripción
No es posible definir la señal de E/S arg para el valor arg.
Consecuencias
evaluar la expresión lógica conectada a arg (consulte registros
de error anteriores). La señal de E/S actualizada con el bool
cíclico se ha perdido.
La ejecución del programa se detiene inmediatamente.
Acciones recomendadas
Causas probables
Recargue el módulo que contiene la declaración de arg.
La señal de E/S arg está mal configurada o el valor que debería
Restablezca la conexión con el dispositivo de E/S. Reconecte
definirse es incorrecto. El valor de señal utilizado ha sido leído
la señal definida por el programa de RAPID con AliasIO.
desde una variable persistente especificada en una de las
Reconecte la expresión lógica.
instrucciones de configuración utilizada para Trigg definir
condiciones y acciones para el establecimiento de una señal
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
343
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41862, Fallo de configuración de registro ASCII
Acciones recomendadas
Compruebe la dirección MAC y corrija la dirección utilizada.
Descripción
El registro ASCII no puede configurarse para el bool cíclico
arg.
Causas probables
La longitud de la dirección MAC en formato
XX:XX:XX:XX:XX:XX.
41880, Error de definición de AliasCamera
El bool cíclico no está activo cuando la activación del registro
ASCII se realiza con la instrucción de RAPID StartAsciiLog.
Descripción
Tarea: arg.
Acciones recomendadas
La cámara del argumento CameraName o FromCamera, arg,
Utilice la instrucción de RAPID SetupCyclicBool mediante el
bool cíclico arg antes de utilizar StartAsciiLog.
41863, La unidad mecánica no es un robot TCP
debe estar definida en la configuración de configuración
(SIO.cfg) y la cámara del argumento ToCamera, arg, debe estar
declarada en el programa de RAPID y no definida en la
configuración de comunicación (SIO.cfg).
Descripción
Ref. de programa: arg.
Tarea: arg.
Acciones recomendadas
La unidad mecánica arg no es un robot TCP. arg únicamente
Compruebe la configuración de comunicación y el programa
puede utilizarse si la unidad mecánica es un robot TCP.
de RAPID.
Ref. de programa: arg.
Recuperación: arg.
Consecuencias
La ejecución del programa se detiene inmediatamente.
41881, Interrupción de booleano persistente
Acciones recomendadas
Descripción
Utilice arg con un robot TCP exclusivamente.
Tarea: arg.
Un cambio de valor en una variable booleana persistente
41864, Error de argumento
interrumpió la ejecución.
Ref. de programa: arg.
Descripción
Tarea: arg.
Acciones recomendadas
Combinación incorrecta de interruptores.
Recuperación: arg.
El interruptor arg solo puede combinarse con el interruptor arg.
Ref. de programa: arg.
41882, Error en bool cíclico
Consecuencias
Descripción
La ejecución del programa se detiene inmediatamente.
Tarea: arg.
Acciones recomendadas
La condición utilizada en SetupCyclicBool es demasiado
Corrija el programa de RAPID.
compleja.
Ref. de programa: arg.
41865, Dirección MAC no válida
Consecuencias
La ejecución del programa se detiene inmediatamente.
Descripción
Tarea: arg.
Causas probables
Dirección MAC arg no válida.
La condición utilizada en SetupCyclicBool es demasiado
Ref. de programa: arg.
compleja.
Consecuencias
Acciones recomendadas
La ejecución del programa se detiene inmediatamente.
Divida la expresión en dos subexpresiones para lograr que
cada una de ellas sea menos compleja que la expresión original.
Causas probables
Es posible que el formato sea incorrecto.
Continúa en la página siguiente
344
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41883, El archivo arg está dañado
41886, Error de CyclicBrakeCheck
Descripción
Descripción
Tarea: arg.
Tarea: arg.
El archivo ha sido editado o se ha interrumpido un arg previo
CyclicBrakeCheck ya está activo.
y el archivo se dañó después.
No puede ejecutar la rutina CyclicBrakeCheck al mismo tiempo
Ref. de programa: arg.
desde distintas tareas o niveles de ejecución.
La tarea actual, arg, está ejecutando CyclicBrakeCheck en el
Consecuencias
nivel de ejecución arg (NIVEL_NORMAL=0,
El nombre del archivo es ahora arg.
arg se volverá a crear la próxima vez que se ejecute la rutina.
Se perderá todo el historial de arg, pero se puede encontrar en
el archivo arg, en el directorio HOME:.
NIVEL_SERVICIO=2).
Ref. de programa: arg.
Consecuencias
La ejecución del programa se detiene inmediatamente.
Causas probables
Archivo editado o dañado por la interrupción de una ejecución
Causas probables
anterior de la rutina.
Más de una llamada al procedimiento CyclicBrakeCheck.
Acciones recomendadas
41884, Error de CyclicBrakeCheck
Compruebe que solo una tarea esté ejecutando la rutina
Descripción
CyclicBrakeCheck si usa un sistema MultiMove. Si realiza la
Tarea: arg.
llamada a CyclicBrakeCheck desde una rutina de servicio,
Las opciones SafeMove o EPS son obligatorias si se prevé
compruebe que la ejecución de CyclicBrakeCheck en el nivel
ejecutar CyclicBrakeCheck.
normal haya acabado. Para cancelar un CyclicBrakeCheck
Ref. de programa: arg.
activo, mueva el puntero de programa a la posición del cursor
o a Main.
Consecuencias
La ejecución del programa se detiene inmediatamente.
41887, Error de BrakeCheck
Causas probables
Uso de CyclicBrakeCheck sin las opciones requeridas.
Descripción
Tarea: arg.
Acciones recomendadas
BrakeCheck ya activo.
Utilice BrakeCheck para probar los frenos cuando no tenga la
opción SafeMove ni EPS.
No puede ejecutar la rutina BrakeCheck al mismo tiempo desde
distintas tareas o niveles de ejecución.
La tarea actual, arg, está ejecutando BrakeCheck en el nivel
41885, Error de BrakeCheck
de ejecución arg (NIVEL_NORMAL=0, NIVEL_SERVICIO=2).
Descripción
Ref. de programa: arg.
Tarea: arg.
Consecuencias
Si tiene la opción SafeMove o EPS, debería utilizar
La ejecución del programa se detiene inmediatamente.
CyclicBrakeCheck para probar los frenos.
Ref. de programa: arg.
Causas probables
Más de una llamada al procedimiento BrakeCheck.
Consecuencias
La ejecución del programa se detiene inmediatamente.
Acciones recomendadas
Compruebe que solo una tarea esté ejecutando la rutina
Causas probables
BrakeCheck si usa un sistema MultiMove. Si realiza la llamada
Uso de la rutina BrakeCheck cuando se debería utilizar
a BrakeCheck desde una rutina de servicio, compruebe que la
CyclicBrakeCheck.
ejecución de BrakeCheck en el nivel normal haya acabado.
Acciones recomendadas
Para cancelar un BrakeCheck activo, mueva el puntero de
Utilice CyclicBrakeCheck para probar los frenos.
programa a la posición del cursor o a Main.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
345
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41888, Comando no permitido
41891, Número insuficiente de puntos
Descripción
Descripción
Tarea: arg
Tarea: arg
La instrucción/función arg no se puede usar cuando hay en
Para identificar una línea hacen falta al menos dos puntos.
curso una comprobación de freno.
Puntos usados: arg
Ref. de programa: arg.
Ref. de programa: arg.
Consecuencias
Consecuencias
La ejecución del programa se detiene inmediatamente. Mueve
La ejecución del programa se detiene inmediatamente.
PP a Main.
Acciones recomendadas
Causas probables
Corrija el programa de RAPID.
Se está ejecutando una comprobación de freno y entonces no
se puede usar arg
41892, Número insuficiente de puntos
Acciones recomendadas
Descripción
Termine la ejecución de la rutina CyclicBrakeCheck o
Tarea: arg
BrakeCheck antes de usar arg.
Para identificar un plano hacen falta al menos tres puntos.
Puntos usados: arg
41889, Error de valor
Ref. de programa: arg.
Descripción
Consecuencias
Tarea: arg
La ejecución del programa se detiene inmediatamente.
El valor leído es un entero superior al máximo permitido para
el tipo num: 8388608. Valor leído: arg.
Acciones recomendadas
Corrija el programa de RAPID.
Ref. de programa: arg.
41893, Número insuficiente de puntos
Consecuencias
La ejecución del programa se detiene inmediatamente.
Descripción
Causas probables
Tarea: arg
Una variable num se usa para leer un valor entero y el valor
Para identificar un círculo hacen falta al menos tres puntos.
está por encima del valor máximo permitido para num.
Puntos usados: arg
Acciones recomendadas
Ref. de programa: arg.
Cambie el tipo de datos de arg a una variable dnum.
Consecuencias
La ejecución del programa se detiene inmediatamente.
41890, Error de parámetro
Acciones recomendadas
Descripción
Corrija el programa de RAPID.
Tarea: arg
El valor usado en el argumento NumPoints (arg) es mas grande
que el tamaño de la matriz del argumento Points (arg).
Ref. de programa: arg.
41894, Número insuficiente de puntos
Descripción
Tarea: arg
Consecuencias
Para identificar una esfera hacen falta al menos cuatro puntos.
La ejecución del programa se detiene inmediatamente.
Puntos usados: arg
Acciones recomendadas
Ref. de programa: arg.
Corrija el programa de RAPID.
Consecuencias
La ejecución del programa se detiene inmediatamente.
Acciones recomendadas
Corrija el programa de RAPID.
Continúa en la página siguiente
346
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
41895, Demasiados puntos
Acciones recomendadas
Corrija el programa de RAPID.
Descripción
Tarea: arg
41899, Error de argumento
Puede gestionar hasta 100 puntos.
Puntos usados: arg
Descripción
Ref. de programa: arg.
Tarea: arg
La distribución de puntos no determina una línea
Consecuencias
La ejecución del programa se detiene inmediatamente.
Ref. de programa: arg.
arg
Acciones recomendadas
arg
Corrija el programa de RAPID.
arg
Consecuencias
41896, Error de argumento
La ejecución del programa se detiene inmediatamente.
Descripción
Acciones recomendadas
Tarea: arg
No se puede calcular un plano porque los tres puntos están
sobre la misma línea.
Corrija el programa de RAPID.
41900, Error de valor de orientación
Ref. de programa: arg.
Descripción
Consecuencias
La ejecución del programa se detiene inmediatamente.
Tarea: arg.
Valor de orientación incorrecto en arg.
Acciones recomendadas
Ref. de programa: arg.
Corrija el programa de RAPID.
Acciones recomendadas
Todas las orientaciones utilizadas deben estar normalizadas,
41897, Error de argumento
es decir, la suma de los cuadrados de los elementos del
Descripción
cuaternión debe ser 1.
Tarea: arg
Recuperación: arg
No se puede calcular una línea porque los dos puntos están
demasiado próximos.
41901, El nombre de la tabla de textos no es
válido
Ref. de programa: arg.
Consecuencias
Descripción
La ejecución del programa se detiene inmediatamente.
Tarea: arg
Acciones recomendadas
El nombre de la tabla de textos es demasiado largo. El máximo
Corrija el programa de RAPID.
es arg caracteres.
Ref. de programa: arg.
41898, Error de argumento
Consecuencias
Descripción
El nombre de la tabla de textos no es válido.
Tarea: arg
Causas probables
La distribución de puntos no determina un plano.
El nombre de la tabla de textos es demasiado largo.
Ref. de programa: arg.
Acciones recomendadas
arg
Cambie el nombre de la tabla de textos.
arg
arg
41902, Cambio en la redefinición de velocidad
Consecuencias
La ejecución del programa se detiene inmediatamente.
Descripción
Tarea: arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
347
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
La redefinición de velocidad establecida por el operador del
FlexPendant ha cambiado. Para lograr un rendimiento correcto,
la redefinición de velocidad debe establecerse en 100 %.
Valor actual: arg.
41905, Error de argumento
Descripción
Tarea: arg.
No puede calcular una esfera porque los puntos están
Consecuencias
distribuidos en línea.
La ejecución del programa se detiene inmediatamente.
Ref. de programa: arg.
Causas probables
Consecuencias
La redefinición de velocidad ha cambiado durante la ejecución
La ejecución del programa se detiene inmediatamente.
de la rutina.
Acciones recomendadas
Acciones recomendadas
Corrija el programa de RAPID.
Mueva PP, cambie la velocidad a 100 % y reinicie la rutina.
41906, Trayectoria fuera del punto de paro
41903, Brake Check, cambio de nombre en el
archivo arg
Descripción
Tarea: arg.
Descripción
Una o varias unidades mecánicas conectadas a la tarea arg no
Tarea: arg.
es un punto de paro. Hay una trayectoria actualmente activa.
El programa Brake Check ha detectado que se utiliza o se ha
Ref. de programa: arg.
utilizado el ajuste. El archivo actual arg no puede modificarse
con la entrada nueva arg.
Consecuencias
La ejecución del programa se detiene inmediatamente.
Ref. de programa: arg.
Causas probables
Consecuencias
arg pasará a llamarse arg. Se creará un archivo nuevo arg.
Una unidad mecánica no está en un punto de paro.
El motivo de este error es uno de los siguientes: El programa
Causas probables
de comprovación de paro se ejecuta como una rutina de
Se utiliza o se ha utilizado el juste para el programa Brake
servicio. Las unidades mecánicas conectadas a otras tareas
Check. El archivo zzz_internal_cbc_tuning.mod está presente
distintas de la que ejecuta la rutina de servicio no se forzarán
en el directorio HOME: o se ha utilizado anteriormente.
a un punto fino. Una o varias tareas están desactivadas en el
Acciones recomendadas
panel de selección de tareas y las trayectorias no se pueden
No se requiere ninguna acción.
finalizar para todas las unidades mecánicas.
Acciones recomendadas
41904, Brake Check, tarea arg desactivada
Antes de ejecutar el programa brake check, finalice la ruta
continua para todas las unidades mecánicas en todas las tareas.
Descripción
Para ello hay que ejecutar paso a paso los movimientos hacia
Tarea: arg.
El programa Brake Check ha detectado que la tarea de
delante.
movimiento arg está desactivada en el panel de selección de
tareas.
41907, Demasiado lejos de la ruta
Ref. de programa: arg.
Descripción
Consecuencias
Tarea: arg.
La ejecución del programa se detiene inmediatamente.
Una o varias unidades mecánicas conectadas a la tarea arg
están demasiado lejos de la ruta para realizar un movimiento
Causas probables
La tarea se ha desactivado en el panel de selección de tareas.
de recuperación.
Ref. de programa: arg.
Acciones recomendadas
Active la tarea arg en el panel de selección de tareas y vuelva
Consecuencias
La ejecución de la rutina arg se ha detenido.
a ejecutar el programa Brake Check.
Continúa en la página siguiente
348
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.6 4 xxxx
Continuación
Causas probables
Acciones recomendadas
La unidad mecánica se ha movido fuera de la trayectoria.
Volver a empezar la ejecución y seleccionar si se debe
recuperar o eliminar la trayectoria. Cancelar llamada a rutina
para finalizar arg.
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
349
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
5.7 5 xxxx
50021, Error de posición de eje
50025, Reinicio interrumpido
Descripción
La posición actual del eje arg está demasiado alejada de la
Descripción
posición ordenada.
La posición actual está demasiado separada de la trayectoria.
Acciones recomendadas
Acciones recomendadas
Compruebe los parámetros de ajuste, las fuerzas externas o
Realice un nuevo reinicio con recuperación.
el hardware.
50026, Cerca de singularidad
50022, Tensión insuficiente en el rectificador
Descripción
Descripción
Tarea: arg.
Las unidades de accionamiento no pueden detectar la tensión
Robot demasiado cerca de singularidad.
del rectificador o la tensión es insuficiente.
Ref. de programa arg.
Esto puede producirse si la barra de bus del rectificador no
(Estado interno: arg).
está bien insertada o si los contactos de alimentación no se
Acciones recomendadas
cierran correctamente.
Modifique la trayectoria del robot para alejarse de la
Acciones recomendadas
singularidad o cambie el modo de movimiento del robot a
Compruebe que la barra de bus del rectificador esté insertada
movimiento de eje.
correctamente entre la unidad de accionamiento y el
En el caso de que la posición del robot dependa del movimiento
rectificador.
de un eje adicional, dicha dependencia también deberá
Compruebe que los motores de los contactos estén cerrados
atenuarse cambiando el sistema de coordenadas de movimiento
y que exista tensión en el lado que está conectado al
del robot de mundo a base.
rectificador.
50027, Eje fuera de rango
50024, Fallo de trayectoria de esquina
Descripción
Descripción
La posición del eje arg arg está fuera del área de trabajo.
Tarea: arg.
Acciones recomendadas
Se ejecuta la trayectoria de esquina como punto de paro debido
Utilice el joystick para mover el eje hasta que esté dentro de
a alguno de los siguientes motivos: Retardo de tiempo. Puntos
su rango de trabajo.
programados muy cerca entre sí. El sistema necesita una carga
alta de CPU. Ref. de programa arg.
50028, Movimiento en un sentido incorrecto
Acciones recomendadas
Descripción
Reduzca el número de instrucciones existentes entre las
La posición del eje arg arg está fuera del área de trabajo.
instrucciones de movimiento consecutivas. Reduzca la
velocidad, utilice puntos más separados o utilice la opción
Acciones recomendadas
/CONC. Aumente el parámetro del sistema 'Prefetch Time' del
Utilice el joystick para mover el eje en sentido opuesto.
tema Motion y el tipo Motion Planner. Si el paro se produce en
el primer movimiento tras un punto fino, aumente el parámetro
50031, Comando no permitido
de sistema 'Interpolation Buffer Startup Adjust', del tema Motion
Descripción
y el tipo Motion Planner. Se puede eliminar este aviso con la
No es posible cambiar los parámetros del sistema en el estado
instrucción RAPID CornerPathWarning.
MOTORES ON.
Acciones recomendadas
Cambie a MOTORES OFF.
Continúa en la página siguiente
350
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50032, Comando no permitido
50050, Posición fuera del área de trabajo
Descripción
Descripción
Se ha intentado realizar una calibración durante el estado
La posición del eje arg arg está fuera del área de trabajo.
MOTORES ON.
Junta 1-6: el número del eje que causa el error.
Junta 23: la responsable del error es la combinación de los
Acciones recomendadas
ejes 2 y 3.
Cambie a MOTORES OFF.
Causas probables
50033, Comando no permitido
El motivo posible es que se utiliza ConfL_Off y que el
movimiento es demasiado grande, de más de 90 grados en un
Descripción
Se ha intentado conmutar los motores durante el estado
solo eje.
Acciones recomendadas
MOTORES ON.
Compruebe el objeto de trabajo o el área de trabajo. Mueva el
Acciones recomendadas
eje en coordenadas de eje. Compruebe los parámetros de
Cambie a MOTORES OFF.
configuración Motion. Inserte puntos intermedios en los
50035, Comando no permitido
movimientos grandes.
50052, Error de velocidad de eje
Descripción
Se ha intentado realizar una sincronización durante el estado
MOTORES ON.
Descripción
La velocidad del eje arg es incorrecta respecto de la velocidad
Acciones recomendadas
pedida, debido a un error del sistema o una colisión.
Cambie a MOTORES OFF.
Acciones recomendadas
50036, Imposible recuperar correctamente
Descripción
Compruebe los parámetros de ajuste, las fuerzas externas
aplicadas al eje y el hardware. Reduzca la velocidad
programada.
Se ha producido un paro en una posición en la que existen
el robot se moverá hasta un punto más avanzado del programa.
50053, Diferencia excesiva en el
cuentarrevoluciones
Acciones recomendadas
Descripción
Reduzca el número de puntos cercanos, aumente la distancia
Diferencia excesiva en el cuentarrevoluciones para el eje arg.
que los separa o reduzca la velocidad.
El sistema ha detectado una diferencia excesiva entre el valor
muchos puntos cercanos con zonas de esquina. Al reiniciar,
real del cuentarrevoluciones en la tarjeta de medida serie y el
50037, Orden MOTORES ON no procesada
valor ofrecido por el sistema.
Descripción
Consecuencias
La orden MOTORES ON no se ha procesado dado que el paro
El robot no está calibrado y es posible moverlo manualmente,
anterior no se había confirmado aún.
pero no se permite ninguna operación automática.
Acciones recomendadas
Causas probables
Repita la orden MOTORES ON.
Es posible que la posición del brazo del robot haya cambiado
manualmente mientras la alimentación estaba apagada.
50042, Imposible crear una trayectoria
También es posible que la tarjeta de medida serie, el resolver
o los cables estén defectuosos.
Descripción
Acciones recomendadas
No se pudo crear la trayectoria.
Actualice el cuentarrevoluciones. Compruebe el resolver y los
Acciones recomendadas
Aumente la distancia existente entre los puntos cercanos.
Reduzca la velocidad. Cambie la aceleración.
cables. Compruebe la tarjeta de medida serie para determinar
si está defectuosa. Sustituya la unidad defectuosa.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
351
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50055, Carga de eje excesiva
Acciones recomendadas
Compruebe los datos de la herramienta y del objeto.
Descripción
El par actual del eje arg es excesiva. Es posible que se deba
al uso de datos de carga incorrectos, una aceleración elevada,
50063, Círculo incierto
grandes fuerzas externas en el proceso, una temperatura
Descripción
insuficiente o un error de hardware.
Tarea: arg
Los puntos están mal situados. Motivo arg: Punto final
Acciones recomendadas
Compruebe los datos de carga. Reduzca la aceleración o la
demasiado cerca del punto de inicio. Punto de círculo
demasiado cerca del punto de inicio. Punto de círculo
velocidad. Compruebe el hardware.
demasiado cerca del punto final. Reorientación incierta. Círculo
demasiado grande > 240 grados. Ref. de programa arg.
50056, Colisión en eje
Acciones recomendadas
Descripción
El par actual del eje arg es superior al solicitado a baja
velocidad o con velocidad cero. Es posible que se deba a una
obstruciión (que se haya bloqueado el brazo) o a un error de
hardware.
Acciones recomendadas
Compruebe los puntos del círculo y el punto final de la
instrucción de movimiento precedente. Los puntos del círculo
pueden verificarse recorriendo paso a paso el círculo en el
modo manual.
50065, Error cinemático
Compruebe que el brazo no esté bloqueado.
Descripción
Compruebe el hardware.
Compruebe si hay otros registros de eventos relacionados con
El destino del movimiento está fuera del alcance del robot o
demasiado cerca de una singularidad. Robot arg.
el hardware.
Acciones recomendadas
50057, Eje no sincronizado
Cambiar la posición de destino.
Descripción
La posición del eje arg después de la caída o la pérdida de
50066, Robot inactivo
alimentación está demasiado alejada de la posición que tenía
Descripción
antes del fallo.
Se ha intentado coordinar el movimiento o calcular la posición
del robot desactivado arg.
Acciones recomendadas
Realice una nueva actualización del cuentarrevoluciones.
Acciones recomendadas
Active el robot desde la ventana de movimiento o el programa.
50058, Error de sistema de coordenadas de la
herramienta
Compruebe el objeto de trabajo y el programa.
50067, Unidad inactiva
Descripción
La dirección Z del sistema de coordenadas de la herramienta
Descripción
está casi paralela a la dirección de la trayectoria.
Se ha intentado coordinar el movimiento o calcular la posición
de la unidad independiente desactivada arg.
Acciones recomendadas
Cambie el sistema de coordenadas de la herramienta para
Acciones recomendadas
obtener una desviación de al menos 3 grados entre la dirección
Active el robot desde la ventana de movimiento o el programa.
Z y la dirección de la trayectoria.
Compruebe el objeto de trabajo y el programa.
50060, Herramienta incorrecta
50076, Orientación incorrecta
Descripción
Descripción
La definición de la herramienta estacionaria no es válida.
La orientación no está definida correctamente.
Continúa en la página siguiente
352
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
Acciones recomendadas
Realice una normalización exacta de los elementos del
cuaternio.
50085, Demasiadas bases de coordenadas de
usuario.
Descripción
50078, Demasiadas posiciones cercanas
Descripción
Se ha definido más de una base de coordenadas de usuario
para la unidad mecánica arg .
Acciones recomendadas
Existe un número excesivo de posiciones consecutivas muy
cercanas entre sí.
Elimine una de las bases de datos de coordenadas o defina
una unidad mecánica adicional.
Acciones recomendadas
Aumente la distancia entre las posiciones cercanas
consecutivas.
50086, Problema de singularidad
Descripción
50079, Imposible usar la oscilación de muñeca
Descripción
La distancia a la singularidad de la muñeca es demasiado
reducida respecto de la resolución numérica del eje 4 de arg.
Acciones recomendadas
Oscilación de muñeca imposible.
Cambie la posición de destino en unos pocos incrementos.
Acciones recomendadas
Utilice una amplitud de oscilación menor o un TCP mayor.
50080, Posición no compatible
Descripción
50087, Problema de singularidad
Descripción
La distancia a la singularidad de la muñeca es demasiado
reducida respecto de la resolución numérica del eje 6 de arg.
No es posible alcanzar la posición deseada con la configuración
definida para el robot. Robot arg.
Acciones recomendadas
Cambie la posición de destino en unos pocos incrementos.
Acciones recomendadas
Modifique la posición del robot en el programa.
50082, Sobrepasado el tiempo de cálculo de
trayectoria
50088, Imposible reiniciar
Descripción
No es posible reiniciar la trayectoria debido a un error anterior.
Acciones recomendadas
Descripción
Mueva el puntero de programa para salir de la trayectoria e
El tiempo de cálculo de trayectoria para las unidades mecánicas
inicie un nuevo movimiento.
que funcionan en el planificador de movimientos arg sobrepasa
el límite interno. La tarea de movimiento no se ejecutó dentro
50089, Oscilación cambiada
de su límite de tiempo.
Descripción
Causas probables
La carga de la CPU es demasiado elevada. Por ejemplo, podría
deberse a una comunicación de E/S demasiado frecuente.
Tarea: arg
La oscilación solicitada no se ha conseguido debido a: Alta
frecuencia de oscilación. Desplazamiento o método de
Acciones recomendadas
oscilación no permitidos. O bien uso de SingArea/Wrist con la
Cambie el valor del parámetro del sistema 'High Interpolation
oscilación de muñeca. Ref. de programa arg
Priority' para el planificador de movimientos afectado. Pruebe
a reducir la carga de la CPU con una o varias de las acciones
siguientes: Reduzca la velocidad. Cambie el valor de AccSet.
Evite singularidades (SingArea\Wrist). Si el error se produce
directamente después de iniciar desde un punto fino, aumente
el parámetro de sistema 'Interpolation Buffer Startup Adjust',
Acciones recomendadas
Aumente la longitud o el periodo de la oscilación.
No hay ningún desplazamiento entre la oscilación del brazo y
la de la muñeca.
utilice SingArea/Off con la oscilación de muñeca.
del tema Motion y el tipo Motion Planner.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
353
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50091, Imposible reiniciar.
y el tipo Motion Planner. Se puede eliminar este aviso con la
instrucción RAPID CornerPathWarning.
Descripción
No es posible reiniciar. El cambio de estado de la unidad
mecánica impide reiniciar el programa.
50132, Fallo de conmutación
Descripción
Acciones recomendadas
Mueva el puntero de programa e inicie un nuevo movimiento.
Fallo de conmutación en el eje arg.
Acciones recomendadas
50092, Respuesta del computador de ejes
Descripción
Respuesta incorrecta desde el computador de ejes.
Realice una nueva conmutación. Reinicie el controlador.
50133, No hay señales disponibles
Descripción
Acciones recomendadas
Compruebe los parámetros de configuración Motion.
Compruebe el hardware del computador de ejes.
No hay ninguna señal disponible para el robot arg.
Acciones recomendadas
Compruebe que ha definido las señales correctas.
50094, TuneServo imposible
50134, Error del vector de corrección
Descripción
El ajuste no se ha implementado para el eje especificado.
Descripción
Los cálculos de vector de corrección de sensor fallaron debido
Acciones recomendadas
Asegúrese de elegir un parámetro y/o un eje que admita el uso
a un error anterior.
de TuneServo.
Acciones recomendadas
50096, TuneServo no permitido
50135, SoftAct imposible.
Descripción
Descripción
El ajuste no se permite para el eje especificado.
No es posible activar el servo de software.
Acciones recomendadas
Acciones recomendadas
Asegúrese de elegir un parámetro y/o un eje que admita el uso
Asegúrese de elegir un eje que admita el uso de SoftAct.
de TuneServo.
50124, Zona convertida a punto fino
50138, Límite de punto de comprobación de
brazo
Descripción
Descripción
Tarea: arg.
El robot arg ha alcanzado el límite del punto de comprobación
Trayectoria de esquina ejecutada como punto de paro, dado
de brazo.
que el margen de tiempo calculado para el siguiente segmento
es 0.
Acciones recomendadas
Utilice el joystick para situar de nuevo el eje afectado dentro
Puede deberse a: Puntos programados muy cerca entre sí. El
de su rango de trabajo.
sistema necesita una carga alta de CPU. Ref. de programa arg.
Acciones recomendadas
Reduzca el número de instrucciones existentes entre las
instrucciones de movimiento consecutivas. Reduzca la
velocidad, utilice puntos más separados o utilice la opción
/CONC. Aumente el parámetro del sistema 'Prefetch Time' del
tema Motion y el tipo Motion Planner. Si el paro se produce en
el primer movimiento tras un punto fino, aumente el parámetro
50139, Límite de punto de comprobación de
brazo
Descripción
Se ha realizado un movimiento en el sentido incorrecto cuando
el punto de comprobación de brazo estaba fuera de rango para
el robot arg.
de sistema 'Interpolation Buffer Startup Adjust', del tema Motion
Continúa en la página siguiente
354
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
Acciones recomendadas
referencia. Ponga atención al posicionar el robot respecto de
Utilice el joystick para mover el eje en sentido opuesto.
los puntos de referencia.
50140, Carga útil excesiva
50145, Limitación cinemática
Descripción
Descripción
El uso de una carga útil muy pesada ha causado que se
Existe una limitación cinemática en el robot arg, sin solución
superara el límite de par estático en el eje arg.
aparente. Segmento demasiado largo. Posición cerca de una
singularidad. Eje 1, 2 ó 3 fuera de rango. Posición fuera de
Acciones recomendadas
Compruebe y reduzca la carga útil del brazo y/o la muñeca.
alcance.
Reduzca el rango de trabajo del eje para reducir el par estático
Acciones recomendadas
causado por la gravedad.
Inserte un punto intermedio para reducir la longitud del
segmento. Utilice MoveAbsJ. Compruebe el rango de trabajo.
50142, Configuración de movimientos
50147, Fallo de reinicio tras caída de alimentación
Descripción
Fallo de configuración del manipulador.
Descripción
arg
Fallo al recrear la trayectoria.
arg.
Acciones recomendadas
Acciones recomendadas
Mueva el puntero de programa e inicie un nuevo movimiento.
Compruebe los parámetros del sistema del tema Motion.
Utilice unos parámetros de sistema correctos y restablezca el
sistema.
50153, Comando no permitido
Descripción
50143, Configuración de ejes del robot
Tarea: arg.
La instrucción o el comando utilizados no estaban permitidos
Descripción
dado que el programa de robot se estaba ejecutando en un
La configuración actual no coincide con la solicitada y/o el
estado de espera.
movimiento de cualquiera de los ejes del robot es de más de
(Estado interno: arg arg).
90 grados. Robot arg, eje arg.
Ref. de programa arg.
Acciones recomendadas
Acciones recomendadas
Utilice SingArea_Wrist, ConfL_Off, modifique la posición o
Modifique el programa o detenga su ejecución antes de ejecutar
inserte un punto intermedio.
el comando.
No será posible continuar en el modo automático sin corregir
la configuración. Para poder mover la posición en cualquier
caso, cambie al modo manual y repita el reinicio.
50144, Base de coordenadas incierta en el
desplazamiento
50156, No es un eje independiente
Descripción
El eje arg no está configurado como un eje independiente.
Acciones recomendadas
Modifique el programa o configure el eje como un eje
Descripción
independiente del tema Motion y el tipo Arm.
La calibración de la base de coordenadas de desplazamiento
resulta incierta en el robot arg, debido a una o varias de las
50157, Error del vector de corrección X
causas siguientes: TCP incorrecto. Puntos de referencia
inexactos. Puntos de referencia con separaciones incorrectas.
Descripción
Los cálculos de vector X de corrección de sensor fallaron
Acciones recomendadas
Si el error estimado no es aceptable: Compruebe que está
utilizando el TCP correcto. Pruebe con más de 3 puntos de
debido a un error anterior.
Acciones recomendadas
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
355
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50158, Falta un sensor de proceso
50167, Nueva sincronización
Descripción
Descripción
Falta un sensor de proceso durante la inicialización. El sensor
Se ha recibido una nueva señal de sincronización de objeto
de proceso con nombre arg no se encuentra o no puede
mientras el transportador estaba activo y se ejecutaba el
inicializarse.
programa.
Acciones recomendadas
Compruebe el nombre del proceso del tema Motion y el tipo
50168, Nueva sincronización en arg
Process.
Descripción
Se ha recibido una nueva sincronización de objeto mientras el
50159, No hay ningún proceso externo
transportador realizaba el seguimiento del objeto anterior.
Imposible realizar el seguimiento de dos objetos al mismo
Descripción
Se ha intentado coordinar el movimiento o calcular la posición
de un solo arg sin ningún proceso externo.
tiempo.
Acciones recomendadas
Reduzca la velocidad del transportador. Aumente la velocidad
Acciones recomendadas
Compruebe el nombre del proceso en los archivos de
programada.
configuración del tema Motion y el tipo Process.
50172, MoveJ no permitido
50160, Posición fuera de alcance
Descripción
No se permite usar MoveJ con un objeto de trabajo que está
Descripción
La posición programada para el eje independiente arg está
fuera del rango de trabajo y por tanto fuera de alcance.
coordinado con una unidad mecánica de posicionamiento
externo.
Acciones recomendadas
Acciones recomendadas
Cambie la posición. Compruebe los límites del área de trabajo
Cambie el movimiento lineal o el objeto de trabajo.
del eje. Compruebe el objeto de trabajo utilizado.
50173, Se requiere punto fino
50163, Ajuste de posición
Descripción
Utilice un punto fino al cambiar la herramienta o la coordinación
Descripción
El ajuste de posición externo es demasiado grande. La
velocidad del TCP, la velocidad de orientación o la velocidad
de posición externa sobrepasan la capacidad del robot.
del objeto de trabajo si el objeto de trabajo está coordinado
con una unidad mecánica de posicionamiento externo.
Acciones recomendadas
Cree un punto fino y cambie la herramienta.
Acciones recomendadas
Reduzca las velocidades programadas para el TCP y la
orientación. Modifique la trayectoria. Realice WaitWObj más
50174, WObj no conectado
cerca de la sincronización. Ejecute en el modo automático.
Descripción
El objeto WObj no está conectado al transportador arg. No es
50164, Imposible desactivar
posible coordinar el TCP del robot con el objeto de trabajo. Es
posible que el objeto se caiga a causa del fallo de
Descripción
No es posible realizar la desactivación de la unidad mecánica
durante el modo independiente.
sincronización de tiempos del nodo de transportador.
Acciones recomendadas
Compruebe si falta WaitWObj.
Acciones recomendadas
Asegúrese de que no esté utilizando el modo independiente y
Compruebe si se ejecuta DropWObj antes del fin de la
coordinación.
vuelva a intentar la desactivación.
Compruebe el fallo de la sincronización de tiempos y
compruebe el estado del modo de transportador.
Continúa en la página siguiente
356
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50175, Transportador en movimiento
Acciones recomendadas
Utilice el joystick para mover los ejes hasta su rango de trabajo
Descripción
El transportador arg se está moviendo mientras se intenta
coordinar el TCP del robot con el objeto de trabajo del
transportador durante el modo prohibido.
acoplado.
50182, Movimiento en un sentido incorrecto
Descripción
Acciones recomendadas
No es posible coordinar el transportador mientras está en el
El eje arg y arg está fuera del rango de trabajo acoplado.
modo manual a velocidad reducida o al ejecutar paso a paso
Acciones recomendadas
en el modo automático y con el transportador en movimiento.
Utilice el joystick para mover los ejes hasta su rango de trabajo
acoplado.
50176, Transportador inactivo
50183, El robot está fuera del área de trabajo.
Descripción
El transportador arg no estaba activo mientras se intenta
Descripción
coordinar el TCP del robot con el objeto de trabajo del
El robot ha alcanzado la zona mundo arg, arg
transportador.
Acciones recomendadas
Acciones recomendadas
Compruebe el motivo de la llegada a la zona mundo. Utilice el
Asegúrese de que la unidad mecánica del transportador esté
joystick para alejar el robot de la zona mundo si es necesario.
activa. Compruebe si se usa un punto fino para el último
movimiento coordinado antes de DeactUnit.
50184, Error del vector de corrección Y
Descripción
50177, Imposible reiniciar
Los cálculos de vector de corrección de sensor fallaron debido
a un error anterior.
Descripción
El transportador arg se está moviendo en el momento de
Acciones recomendadas
intentar el reinicio o antes de pulsar Parar o recorrer el
programa paso a paso.
50185, Aviso de vector de corrección
Acciones recomendadas
Asegúrese de que el transportador esté parado. Mueva el
puntero de programa e inicie un nuevo movimiento.
Descripción
Los cálculos de vector de corrección de sensor fallaron debido
a un error anterior.
50178, Movimiento no óptimo
Acciones recomendadas
Descripción
50188, Movimiento no óptimo
El par necesario es demasiado elevado. Debe ajustar
manualmente la aceleración o la velocidad.
Descripción
El par necesario es demasiado elevado. Debe ajustar
Acciones recomendadas
Reduzca la aceleración (AccSet 50 100) de este movimiento y
manualmente la frecuencia o la amplitud de la oscilación.
restáurela posteriormente (AccSet 100 100). Para optimizar el
Acciones recomendadas
rendimiento, determine la aceleración máxima, de 50 a 99. Otra
Reduzca la frecuencia o la amplitud de la oscilación de este
posibilidad es reducir la velocidad.
movimiento. Otra posibilidad es reducir la velocidad.
50181, Fuera del rango acoplado
50189, Señal de relé no encontrada
Descripción
Descripción
El eje arg y arg está fuera del rango de trabajo acoplado.
La señal arg del relé arg no está definida en la configuración
de E/S. La unidad mecánica que utiliza este relé no se tendrá
en cuenta.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
357
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
Acciones recomendadas
Acciones recomendadas
Compruebe las definiciones de las señales de E/S y la definición
Ajuste los parámetros del sistema del tema Motion y el tipo
de los parámetros del sistema en el tema Motion, tipo: Relay.
Control Master no calibrado 0. Si utiliza TuneServo, ajuste el
parámetro 'TUNE_DF'.
50190, Error permanente de bloqueo de
interpolador
50195, Imposible mover independiente
Descripción
Descripción
El número de ejes activos encontrados no es igual al número
El eje arg no puede moverse en el modo independiente.
de ejes esperados.
Acciones recomendadas
Acciones recomendadas
Asegúrese de que no esté utilizando el modo independiente al
Compruebe la configuración de la unidad que está utilizando
intentar mover el eje.
la cinemática general.
50196, Fallo al calibrar
50191, Demasiadas velocidades de TCP
Descripción
Descripción
Puntos 0 y 1 demasiado cercanos.
El número de velocidades de TCP dentro de un mismo
segmento es excesivo. El número máximo de velocidades del
TCP es arg.
Acciones recomendadas
Realice una nueva calibración con una distancia mayor entre
los puntos 0 y 1.
Acciones recomendadas
Compruebe si un segmento tiene demasiadas velocidades de
TCP configuradas o si una secuencia de segmentos tiene un
valor de DipLag en aumento.
50197, Fallo al calibrar
Descripción
Los puntos 0, 1, 2 están en línea o el punto 2 está demasiado
cerca de los puntos 0 ó 1.
50192, Error de movimiento
Acciones recomendadas
Descripción
Realice una nueva calibración tras mover los puntos de forma
El movimiento ha empezado demasiado pronto después de
detener el programa.
que los puntos 0, 1 y 2 no están en línea o con una distancia
mayor entre el punto 2 y los puntos 0 y 1.
Acciones recomendadas
50198, Fallo al calibrar
Pruebe a mover de nuevo el robot.
Descripción
50193, Eje no sincronizado
Se ha producido un error interno durante la calibración, debido
Descripción
a un interruptor de origen desconocido.
La velocidad del eje arg era demasiado elevada antes de la
caída de alimentación.
Acciones recomendadas
Informe del caso a ABB. Realice una nueva calibración.
Acciones recomendadas
Realice una nueva actualización del cuentarrevoluciones.
50194, Error interno de posición
Descripción
50200, Error de par
Descripción
Error de cálculo de par debido a la alta velocidad de la unidad
mecánica arg. Estado interno arg.
Se ha producido un error causado por una limitación numérica
interna. Número de eje arg. Posición de referencia calculada
Acciones recomendadas
Compruebe los datos de carga. Reduzca la velocidad.
= arg.
Continúa en la página siguiente
358
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50201, Orientación fuera de alcance
'RAPID general', y añadir un gestor de errores para los errores
de colisión.
Descripción
El error de la orientación programada excede del límite
permitido.
50205, Error de registro de datos
Descripción
Acciones recomendadas
Ajuste la orientación del objetivo de robot. Ajuste/compruebe
arg
las orientaciones de las bases de coordenadas utilizadas
Acciones recomendadas
actualmente: herramienta, base, usuario, objeto... Es posible
Solución:
(pero no recomendable) desactivar la supervisión de la
arg
orientación utilizando el parámetro de sistema correspondiente.
Consulte la documentación de los parámetros de sistema para
obtener más detalles (tema Motion/tipo Robot).
50203, Nodo de medición ya utilizado
50207, Añada un punto intermedio
Descripción
Se requiere un punto intermedio no coordinado con la unidad
mecánica de posicionamiento externo si se desea cambiar el
transportador.
Descripción
El nodo de medición del eje arg ya se está utilizando.
Acciones recomendadas
Cree un punto intermedio y cambie el transportador.
Acciones recomendadas
Seleccione otro nodo.
50208, Falta una función
50204, Supervisión del movimiento
Descripción
Descripción
No es posible activar la compensación de fricción para el eje
Se ha disparado la supervisión de movimiento para el eje arg
arg.
de la unidad mecánica arg.
Acciones recomendadas
Instale la opción Advanced Robot Motion.
Consecuencias
El movimiento de la unidad mecánica arg se detendrá
inmediatamente. A continuación, vuelve a la posición de la
trayectoria en la que se estaba ejecutando. Si la gestión de
errores de colisión no está configurada, la ejecución se
detendrá y permanecerá en el estado Motors ON, en espera
de una solicitud de inicio. Si la gestión de errores de colisión
está configurada, la ejecución continuará en un gestor de
50209, Limitación cinemática
Descripción
No se ha encontrado ninguna solución aceptable. Residual:
arg grados en la orientación, arg mm en x,
arg mm en y, arg mm en z.
Acciones recomendadas
errores.
Inserte un punto intermedio. Compruebe la singularidad.
Causas probables
El disparo de la supervisión del movimiento puede ser causado
por una colisión, una definición incorrecta de las cargas o una
fuerza del proceso externo.
Aumente la tolerancia de posición y orientación. Utilice
MoveAbsJ. Compruebe el rango de trabajo.
50210, Fallo de identificación de carga
Acciones recomendadas
Si se detiene la ejecución, confirme el fallo y reanude el
funcionamiento presionando el botón Start (Inicio) del
FlexPendant. Asegúrese de que todas las cargas estén
Descripción
Imposible cargar la identificación de carga porque el ángulo
de configuración es demasiado reducido.
definidas e identificadas correctamente. Si la unidad mecánica
Acciones recomendadas
está expuesta a fuerzas de los procesos externos, utilice
Aumente el ángulo de configuración.
comandos de RAPID o parámetros del sistema para aumentar
el nivel de supervisión. Considere la posibilidad de configurar
la gestión de errores de colisión en el tema Controller, tipo
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
359
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50214, Fallo de configuración de área de trabajo
Acciones recomendadas
Asegúrese de que el manipulador seleccionado se corresponda
Descripción
Es posible que el área de trabajo definida sea mayor que el
área máxima permitida para el robot arg.
con la unidad mecánica seleccionada e inténtelo de nuevo.
50224, Imposible definir la carga
Acciones recomendadas
Ajuste los parámetros del área de trabajo del tema Motion y
los parámetros de sistema del tipo Robot e inténtelo de nuevo.
Descripción
No se permite definir una carga en el eje arg de la unidad
mecánica arg o la interpolación no se detiene en un punto fino.
50215, Fallo de identificación de carga
Acciones recomendadas
Cambie de número de eje o de unidad mecánica, o bien cambie
Descripción
El eje arg se moverá fuera del rango de trabajo.
Acciones recomendadas
el movimiento antes del punto fino.
50225, Fallo de sincronización
Mueva el eje a una posición situada más allá del límite de rango
Descripción
de trabajo.
Error en los datos de sincronización. Controlador actualizado
50218, Trayectoria no finalizada
con nuevos datos. Sistema no sincronizado.
Acciones recomendadas
Descripción
Actualice todos los cuentarrevoluciones.
Tarea: arg
La trayectoria de movimiento anterior no se finalizó antes de
enviar el nuevo movimiento.
50226, Error de referencia de motor
Descripción
Ref. de programa arg
El tiempo de cálculo de referencia de motor supera los límites
Acciones recomendadas
Utilice StorePath cuando se encuentre en las rutinas TRAP.
Mueva el puntero de programa e inicie un nuevo movimiento.
internos.
Acciones recomendadas
Reduzca la carga del ordenador principal. Reinicie el
50220, No hay señal de entrada
Descripción
No hay ninguna señal de entrada para el relé de contacto de
controlador.
50227, Canal de señal de registro no válido
Descripción
la unidad mecánica arg
Número de canal no válido arg.
Acciones recomendadas
Asegúrese de conectar y configurar una señal de entrada.
Acciones recomendadas
Pruebe el siguiente número de canal.
50221, Objeto fuera de límites
50228, Número de señal de registro desconocido
Descripción
El objeto del transportador arg se encuentra fuera de los límites
Descripción
de distancia máxima o mínima. El objeto se desecha.
Número de señal desconocido arg.
Acciones recomendadas
Acciones recomendadas
Compruebe los límites o reduzca la velocidad del transportador.
Asegúrese de definir un número válido de señal.
50222, Tipo incorrecto - MechUnit
50229, Unidad de señal de registro desconocido
Descripción
Descripción
Existe un problema de coincidencia de tipo entre el tipo de
Unidad mecánica desconocida arg.
manipulador seleccionado y la unidad mecánica seleccionada.
Continúa en la página siguiente
360
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50239, Cambio de parada de emergencia
Acciones recomendadas
Compruebe el nombre o la configuración.
50230, Eje de señal de registro no válido
Descripción
Descripción
La parada de emergencia ha cambiado al modo de freno debido
a una limitación de aceleración.
Acciones recomendadas
Número de eje no válido arg para la unidad mecánica arg.
Limite la aceleración en el programa.
Acciones recomendadas
Compruebe la unidad mecánica y el número de eje.
50231, Unidad de señal de registro inactiva
Descripción
50240, Cambio de parada de emergencia
Descripción
La parada de emergencia ha cambiado al modo de freno debido
a una limitación de par.
Unidad mecánica arg inactiva.
Acciones recomendadas
Consecuencias
Compruebe los datos de carga.
Es posible que las señales registradas para las unidades
desactivadas no sean válidas.
50241, Falta una función
Acciones recomendadas
Descripción
Active la unidad mecánica para evitar este mensaje de evento.
No ha adquirido la opción Absolute Accuracy.
50234, Desbordamiento durante el registro
Descripción
Acciones recomendadas
Cambie el parámetro de sistema 'Use Robot Calibration' de
robot del tema Motion a r#_uncalib.
Se ha producido un desbordamiento durante el registro de
Acciones recomendadas
50242, Fallo de sincronización debido a los
parámetros del sistema
Defina menos señales. Reduzca la carga en el ordenador
Descripción
principal. Reduzca carga en la red.
Fallo de coincidencia entre el controlador y los parámetros para
señales.
el eje arg (offset o posición de calibración), o Los indicadores
50235, Ninguna interrupción de movimiento
recibida
válidos para 'Calibration offset' o 'Commutation offset' no tienen
Descripción
Acciones recomendadas
El sistema no ha generado interrupciones de movimiento dentro
Actualice el sistema de medición: Actualice el
del tiempo límite.
cuentarrevoluciones. Recalibre el eje. Cambie los parámetros
el valor 'Yes' en los parámetros del sistema.
del sistema.
Consecuencias
El sistema pasa al estado de fallo del sistema.
50243, Sin límite de aceleración
Causas probables
Carga elevada de interrupción del sistema o, en algunos casos
Descripción
poco frecuentes, un error de hardware.
No se ha implementado ningún límite de aceleración para el
robot arg.
Acciones recomendadas
Reinicie el controlador para reanudar el funcionamiento.
Compruebe otros mensajes del registro de errores que se hayan
50244, Error en la calibración Absolute Accuracy
producido al mismo tiempo para determinar la causa. Sustituya
Descripción
el ordenador principal si está defectuoso.
Imposible realizar una calibración Absolute Accuracy para el
robot arg; devolvió el estado arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
361
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
Acciones recomendadas
Compruebe 'Max Force Control Motor Torque' de los parámetros
Reinicio del controlador Compruebe que la unidad de disco
del sistema.
duro no esté llena. Instale más memoria.
50250, Fuerza de calibración reducida
50245, Comando no permitido
Descripción
Descripción
La fuerza de calibración solicitada es demasiado elevada para
Imposible pasar al modo sin ejecución de movimientos en el
la herramienta arg. Par motor solicitado (Nm)= arg. La fuerza
estado Motors On.
se ha reducido al par motor máximo.
Acciones recomendadas
Acciones recomendadas
Cambie a Motors Off.
Compruebe las fuerzas de calibración en los parámetros del
sistema. Compruebe la fuerza con la calibración de par de los
50246, Error de motor vinculado.
parámetros del sistema. Compruebe 'Max Force Control Motor
Torque' de los parámetros del sistema.
Descripción
Existe un gran offset de posición entre el eje pasivo y el eje
maestro.
50251, Fallo de apertura de herramienta
Descripción
Acciones recomendadas
Inicie la rutina de servicio de motor vinculado. Mueva el eje
pasivo a la misma posición que el eje maestro.
Se ha detectado un movimiento de eje de herramienta de arg
solicitado durante la apertura de la herramienta.
Acciones recomendadas
50247, Fallo de borrado de trayectoria
Asegúrese de que la apertura de la herramienta esté preparada
antes de ejecutar el siguiente movimiento del eje de la
Descripción
Es necesario detener el movimiento si se desea borrar la
trayectoria.
Acciones recomendadas
herramienta. Reduzca el parámetro de sistema
'Post-synchronization Time'.
50252, Fallo de apertura de herramienta
Utilice StopMove antes de la instrucción ClearPath. Mueva el
puntero de programa e inicie un nuevo movimiento.
Descripción
Se ha detectado un movimiento de eje de herramienta de arg
50248, Error interno de herramienta de servo
solicitado durante la apertura de la herramienta en una
calibración.
Descripción
Error interno de la herramienta arg en el estado arg
arg
Acciones recomendadas
Asegúrese de que no solicita ningún movimiento del eje de la
herramienta durante la calibración.
arg
arg
50253, Imposible desactivar unidad
Acciones recomendadas
Descripción
Póngase en contacto con ABB.
No es posible realizar la desactivación de la unidad mecánica
50249, Fuerza de programa reducida
durante el modo de proceso.
Acciones recomendadas
Descripción
La fuerza de punta programada es demasiado elevada para la
herramienta arg. Par motor solicitado (Nm)= arg. La fuerza se
Asegúrese de salir del modo de proceso antes de desactivar
la unidad mecánica.
ha reducido al par motor máximo.
Acciones recomendadas
Reduzca la fuerza de punta programada. Compruebe la fuerza
con la calibración de par de los parámetros del sistema.
Continúa en la página siguiente
362
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50254, Error de motor vinculado.
Acciones recomendadas
Compruebe las posiciones de sensor programadas en el
Descripción
La velocidad del eje pasivo es demasiado elevada cuando el
eje pasivo se encuentra en el modo de movimiento.
Acciones recomendadas
Inicie la rutina de servicio de motor vinculado. Restablezca el
objetivo de robot. Compruebe la velocidad del sensor. Adelante
la sincronización o reduzca la distancia de espera del sensor.
50260, Error de distancia de comprobación de
sensor
modo de movimiento.
Descripción
50256, Límites fuera de posición de
sincronización
La distancia entre la posición del sensor y la posición
programada arg es demasiado grande arg.
Acciones recomendadas
Descripción
El movimiento del sensor está fuera de límites. La posición de
inicio del sensor debe ser arg que arg, pero el valor detectado
es arg.
Acciones recomendadas
Compruebe las posiciones de sensor programadas en el
objetivo de robot. Compruebe la velocidad del sensor. Aumente
la desviación máxima.
50261, Zona mundo fuera del área de trabajo
Compruebe la posición de sensor programada en el objetivo
de robot. Adelante la sincronización o modifique el objetivo de
Descripción
La definición del límite mínimo de la zona mundo arg se
robot.
encuentra fuera del área de trabajo de: arg arg arg...
50257, Límites fuera de velocidad de
sincronización
Acciones recomendadas
Cambie la definición de la zona mundo de forma que el límite
se encuentre dentro del área de trabajo o inserte 9E9 para
Descripción
La velocidad programa está fuera de límites. La velocidad debe
ser arg que arg, pero el valor detectado es arg.
eliminar un eje de la prueba de zona mundo.
50262, Zona mundo fuera del área de trabajo
Acciones recomendadas
Compruebe la velocidad programada en el robot. Compruebe
la posición programada para el sensor. Compruebe la velocidad
Descripción
La definición del límite máximo de la zona mundo arg se
encuentra fuera del área de trabajo de: arg arg arg...
nominal del sensor.
Acciones recomendadas
50258, Error de dirección de sensor
Cambie la definición de la zona mundo de forma que el límite
se encuentre dentro del área de trabajo o inserte 9E9 para
Descripción
La velocidad de posición de sensor arg y la velocidad de sensor
detectada arg son de sentidos opuestos.
eliminar un eje de la prueba de zona mundo.
50263, El factor de carga es demasiado elevado
Acciones recomendadas
Compruebe las posiciones de sensor programadas en el
objetivo de robot. Adelante la sincronización o reduzca la
Descripción
El factor de carga de la caja reductora del eje arg del robot arg
es demasiado alto. Mantener el funcionamiento sin realizar
distancia de espera del sensor.
ajustes puede causar daños en el motor y la caja reductora.
50259, Error de distancia máxima de sensor
Póngase en contacto con su centro de asistencia y servicio de
ABB.
Descripción
La distancia entre la posición del sensor y la posición
programada es excesiva. arg
Acciones recomendadas
Reduzca la velocidad o aumente el tiempo de espera.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
363
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50265, Grosor fuera de alcance
50271, Exactitud de eventos insuficiente
Descripción
Descripción
Herramienta servo: arg El grosor programado arg mm está
Tarea: arg
fuera de alcance
El sistema está configurado en este momento con la supervisión
Acciones recomendadas
de eventos de tiempo, pero en esta ocasión no fue posible
Ajuste el grosor programado. Compruebe el rango de trabajo
activar un evento con exactitud.
(recorrido mínimo).
Ref. de programa arg
Acciones recomendadas
50266, Fallo en petición de cierre
Reduzca la velocidad programada o aumenta la distancia
existente entre las posiciones programadas. Para desactivar
Descripción
No se permite cerrar la herramienta servo:arg en sentido
inverso.
esta comprobación, modifique los parámetros del sistema.
50272, Configuración de movimientos
Posición antes del cierre: arg mm
Grosor programado: arg mm
Descripción
Acciones recomendadas
Imposible leer los datos de arg para arg.
Ajuste la posición previa al cierre. Ajuste el grosor programado
Acciones recomendadas
Compruebe el archivo de configuración.
50267, Fallo en petición de apertura
Utilice unos parámetros de sistema correctos y restablezca el
sistema.
Descripción
No se permite la apertura de la herramienta servo:arg en sentido
inverso.
Acciones recomendadas
Compruebe los parámetros del sistema tanto de la instancia
actual como de las instancias inferiores de la estructura.
50273, Configuración de movimientos
Compruebe que las posiciones de objetivo de robot
programadas para la herramienta servo sean mayores que el
Descripción
grosor programado.
Parámetro de sistema incorrecto arg para arg. Por ejemplo, es
posible que el parámetro de sistema sea de un tipo desconocido
o un valor numérico fuera de rango.
50268, Fallo al calibrar
Acciones recomendadas
Descripción
No se permite la calibración de la herramienta servo:arg a partir
de una posición negativa.
Compruebe el archivo de configuración.
Utilice unos parámetros de sistema correctos y restablezca el
sistema.
Acciones recomendadas
Ajuste la posición de la herramienta servo antes de la
50274, Configuración de movimientos
calibración.
Descripción
50269, Valor de ajuste fuera de límite
Imposible leer o crear arg con el nombre: arg. Si la instancia
actual existe, se lee. De lo contrario, se crea. En otras palabras,
Descripción
no fue posible leer ni crear la instancia.
Valor de ajuste de la herramienta servo: arg fuera de límite.
Parámetro: arg
Acciones recomendadas
Compruebe el archivo de configuración.
Acciones recomendadas
Utilice unos parámetros de sistema correctos y restablezca el
Corrija el valor de ajuste.
sistema.
Continúa en la página siguiente
364
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50275, Configuración de movimientos
Sin esta opción, la instalación de esta unidad mecánica no se
permite.
Descripción
Imposible leer el siguiente nombre de arg. El nombre anterior
es arg. La instancia anterior es correcta, pero no es posible
La unidad mecánica arg y arg tienen la misma conexión
configurada.
leer la instancia siguiente.
Acciones recomendadas
Compruebe también el registro de errores de configuración
Compruebe el archivo de configuración.
para más detalles.
Utilice unos parámetros de sistema correctos y restablezca el
sistema.
Acciones recomendadas
Compruebe el archivo de configuración.
Utilice unos parámetros de sistema correctos y restablezca el
50280, Configuración del sistema
Descripción
sistema.
La unidad mecánica arg está definida en más de un programa
50276, Configuración de movimientos
de RAPID.
Descripción
Acciones recomendadas
Longitud estándar de cola de servo (arg) fuera de rango (mín.=1,
Compruebe el archivo de configuración.
máx.=arg).
Utilice unos parámetros de sistema correctos y restablezca el
sistema.
Acciones recomendadas
Compruebe el valor de std_servo_queue_length en el archivo
de configuración.
50281, Fallo de proceso
Utilice unos parámetros de sistema correctos y restablezca el
Descripción
sistema.
Tarea: arg
Un proceso de la tarea arg ha fallado. Esto se debe a un fallo
50277, Configuración de movimientos
de un proceso en esta tarea, o una tarea sincronizada si se usa
MultiMove.
Descripción
Número de ejes excesivo (arg) en una redefinición de grupo
dinámico. El número permitido es arg.
arg
Acciones recomendadas
Compruebe los demás mensajes que se hayan producido en
Acciones recomendadas
Compruebe el archivo de configuración.
Utilice unos parámetros de sistema correctos y restablezca el
sistema.
el mismo momento, para determinar los motivos.
Recuperación: arg
50282, Registro no preparado
50278, Configuración de movimientos
Descripción
El registro no está preparado para su activación.
Descripción
Imposible configurar la pistola servo (arg).
Acciones recomendadas
Asegúrese de que el registro haya finalizado antes de activarlo.
Acciones recomendadas
Compruebe los datos de la pistola servo en el archivo de
configuración.
Utilice unos parámetros de sistema correctos y restablezca el
Compruebe sensor_start_signal.
50283, Nombre de archivo de registros no válido
Descripción
sistema.
Nombre de archivo de registros: arg desconocido.
50279, Configuración de movimientos
Acciones recomendadas
Descripción
Compruebe el nombre del archivo o su existencia, con ayuda
El cambio de herramienta servo requiere la opción Servo Tool
del Administrador de archivos.
Change.
Grabe un nuevo archivo.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
365
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50284, Imposible activar la unidad mecánica
Compruebe que la unidad se mueva hasta la posición deseada
antes del movimiento semicoordinado. A continuación de
Descripción
La unidad mecánica arg no puede ser activada porque no está
conectada a ninguna tarea de RAPID.
SyncMoveOff, SyncMoveSuspend, ActUnit, DeactUnit o
ClearPath, la unidad debe moverse (con una nueva instrucción
de movimiento) hasta una posición para definir la base de
Acciones recomendadas
coordenadas, de forma que la otra tarea pueda leerla. La
Compruebe que la conexión entre la unidad mecánica y la tarea
posición puede ser una nueva posición o bien la posición actual
RAPID se haya realizado correctamente del tema Controller.
de la unidad.
Compruebe si el programa de la unidad está activo en el panel
50285, DitherAct imposible
de selección de tareas.
Descripción
No es posible activar la oscilación.
50288, ID de sincronización no coincidente
Acciones recomendadas
Descripción
Asegúrese de elegir un eje que admita el uso de DitherAct.
El número de ID especificado en la instrucción de movimiento
debe ser el mismo para todas las tareas de programa que
50286, Mezcla de bases de coordenadas
cooperen entre sí.
ID de sincronización no coincidente arg, arg.
Descripción
Acciones recomendadas
Tarea: arg
Hay más de una base de coordenadas de movimientos en la
unidad. Motivo arg: No se permite utilizar cadenas de bases
de coordenadas en coordinación. No se permite intercambiar
Compruebe que todos los números de ID especificados sean
iguales y que todos los punteros de programa estén
sincronizados antes de iniciar el programa.
la unidad que controla la base de coordenadas en la zona de
50289, Tipo de punto no coincidente en la
sincronización
esquina. Ref. de programa arg
Acciones recomendadas
Reorganice las unidades de forma que todas las unidades que
Descripción
realicen movimientos coordinados sigan a una misma unidad.
Las instrucciones de movimiento que el valor de syncId = arg
Inserte un punto fino o un movimiento no coordinado entre los
presenta una mezcla de puntos finos y puntos de zona.
dos movimientos de coordenadas.
Acciones recomendadas
Asegúrese de que la instrucción de movimiento de todas las
50287, Unidad mecánica no detenida en una
posición controlada
tareas de programa que cooperen entre sí especifique el mismo
tipo de punto, ya sea fino o de zona.
Descripción
El robot arg está semicoordinado con la unidad arg desde otra
50290, Servicio no disponible
tarea y la unidad se ha movido, o bien falló la recuperación de
Descripción
la trayectoria.
Imposible obtener la licencia correcta.
Consecuencias
Acciones recomendadas
La ejecución o el reinicio del programa serán interrumpidos.
Compruebe su configuración de licencias.
Acciones recomendadas
Compruebe en todos los programas que el movimiento
semicoordinado esté separado por puntos finos e instrucciones
WaitSyncTask antes y después del movimiento, así como que
la unidad no se mueva entre ellos. Recuerde que la instrucción
50294, Error de transmisión de datos
Descripción
La transmisión de datos entre el controlador y la memoria del
robot ha fallado.
WaitSyncTask también es necesaria a continuación de la
semicoordinación, antes de SyncMoveOn y SyncMoveResume.
Continúa en la página siguiente
366
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
Causas probables
Causas probables
El cable o los componentes electrónicos de transmisión han
Acciones recomendadas
fallado. Existe un nivel elevado de interferencias eléctricas.
50298, Memoria actualizada en el controlador
Acciones recomendadas
Inténtelo una vez más. Compruebe los cables. Compruebe la
tarjeta de medida serie. Compruebe el módulo de
accionamiento.
Descripción
Los datos de la unidad mecánica arg han sido trasladados de
la memoria del robot a la del controlador.
50295, Faltan datos de movimiento
Causas probables
Acciones recomendadas
Descripción
Faltan datos en la memoria del robot y del controlador sobre
la unidad mecánica arg.
50299, Se reduce la velocidad
Causas probables
Descripción
Falta el archivo de configuración. Instale una nueva tarjeta de
La velocidad de la unidad arg se ha reducido debido a la unidad
medida serie y un nuevo controlador.
arg, que presenta un límite.
Tarea: arg Línea de instrucción: arg.
Acciones recomendadas
Cargue nuevos archivos de configuración.
Causas probables
La velocidad programada es excesiva en esta unidad o el
50296, Diferencias con los datos de la memoria
del robot
movimiento es demasiado largo en una unidad que presenta
un límite.
Acciones recomendadas
Descripción
Los datos de la memoria del robot no son iguales a los del
controlador para la unidad mecánica arg.
Causas probables
Cambie la trayectoria o la velocidad programada.
Desactive el control de velocidad.
50300, Memoria del robot no utilizada
Los datos o el número de serie son distintos en la memoria del
robot y en la del controlador. Se ha cambiado de robot (tarjeta
Descripción
de medida serie) o de controlador, o bien los parámetros de
La memoria del robot no se utiliza con esta unidad mecánica.
sistema han cambiado.
Causas probables
Acciones recomendadas
Los ejes adicionales no pueden, ni deben, utilizar la memoria
Compruebe el estado a través del FlexPendant y compruebe
del robot.
si se han cargado los parámetros de sistema (número de serie)
Acciones recomendadas
correctos en el controlador. Compruebe que el número de serie
pertenece al robot que está conectado al controlador. Si no es
50301, Faltan todos los datos del robot
así, sustituya los archivos de configuración o transfiera
manualmente los datos de la memoria del robot a la del
controlador si ha sustituido este último.
Si ha sustituido la tarjeta de medición serie por una tarjeta de
Descripción
Faltan todos los datos de la memoria del robot en la tarjeta de
medida serie arg, eslabón arg, Drive Module arg.
otro robot (con un número de serie distinto), borre primero la
Causas probables
memoria del robot desde el FlexPendant y transfiera a
Se ha producido un error en la memoria del robot o en la
continuación los datos del controlador al robot.
comunicación. Los datos han sido borrados.
Acciones recomendadas
50297, Memoria actualizada en el robot
Si el controlador contiene datos correctos, transfiéralos a la
Descripción
memoria del robot. Si el problema no desaparece, compruebe
Los datos de la unidad mecánica arg han sido trasladados de
el cable de comunicación que va a la tarjeta de medida serie.
la memoria del controlador a la del robot.
Sustituya la tarjeta de medida serie.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
367
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50302, Faltan datos de sensor
Descripción
No hay ningún número de serie definido en la memoria del
Asegúrese de que se ha retirado el tope mecánico.
50308, Tiempo límite de posicionamiento agotado
Descripción
robot para la unidad mecánica arg.
Tarea: arg.
Causas probables
La memoria del robot ha sido borrada o se ha instalado una
Ref. de programa arg.
El punto fino no ha sido alcanzado en un intervalo máximo de
nueva tarjeta de medida serie.
arg segundos.
Acciones recomendadas
Si el controlador contiene datos correctos, transfiéralos a la
Acciones recomendadas
Compruebe el ajuste de los ejes adicionales y las condiciones
memoria del robot.
de In Position (Posicionamiento) (In Position Range, Zero Speed
50303, Faltan datos en el controlador
- Área de posicionamiento, Velocidad cero) y compruebe si hay
cualquier problema con los cables del resolver.
Descripción
No hay ningún número de serie definido en el controlador para
50309, Estado de Absolute Accuracy
la unidad mecánica arg.
Descripción
Causas probables
Datos trasladados de la memoria del robot a la del controlador.
La memoria del controlador ha sido borrada o se ha instalado
un nuevo controlador.
Datos de Absolute Accuracy no válidos en la memoria del robot.
Se han borrado del controlador los datos Absolute Accuracy
Acciones recomendadas
de la unidad mecánica arg.
Si la memoria del robot contiene datos correctos, transfiéralos
a la memoria del controlador.
Acciones recomendadas
Cargue nuevos datos de Absolute Accuracy si hay datos
50305, Se utiliza una tarjeta de medida serie
anterior
Descripción
disponibles.
50310, Ejes independientes no activos
Descripción
Se utiliza una tarjeta de medida serie anterior sin memoria de
La unidad mecánica arg con ejes independientes no está activa.
datos.
Acciones recomendadas
Acciones recomendadas
Active la unidad mecánica antes de ejecutar la instrucción de
Sustituya la tarjeta con una nueva que tenga memoria de datos
ejes independientes.
o cambie el valor del parámetro 'Use old SMB' del tema Motion
y el tipo Robot.
50306, Error de identificación de carga
50311, Imposible activar la unidad mecánica en
la tarea
Descripción
Descripción
La unidad mecánica arg no se puede activar en la tarea
Imposible realizar la identificación de carga porque el ángulo
especificada.
de la configuración provoca una singularidad en la matriz de
Acciones recomendadas
inercia.
Compruebe la conexión entre la unidad mecánica y la tarea
Acciones recomendadas
RAPID en la configuración del tema Controller.
Mueva el eje 6 del robot unos 30 grados en cualquier sentido.
50307, Opción Extended working range
50312, Unidad mecánica ya activa en otra tarea
Descripción
Descripción
Imposible activar la unidad mecánica arg porque ya está activa
Se ha instalado la opción Extended working range.
en otra tarea de RAPID.
Continúa en la página siguiente
368
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50313, Fallo en restablecimiento de movimientos
independientes
Acciones recomendadas
Active Absolute Accuracy cambiando el parámetro de sistema
de 'Use Robot Calibration' del tema Motion a r#_calib.
Descripción
El movimiento de restablecimiento del modo de movimientos
independientes ha fallado para arg. Se ha producido un
movimiento sincronizado (MoveL/MoveJ) de la herramienta
servo durante el movimiento de restablecimiento del modo de
Compruebe el estado en la ventana de movimiento.
50317, Desconexión del módulo de
accionamiento no permitida
Descripción
movimientos independientes.
Se ha intentado desconectar el módulo de accionamiento arg,
Acciones recomendadas
Asegúrese de que la velocidad sincronizada de la herramienta
algo que no está permitido.
servo sea cero durante la ejecución de los movimientos de
Consecuencias
restablecimiento del modo de movimientos independientes.
El sistema pasa al estado Motores OFF y a continuación
desconecta el módulo de accionamiento.
50314, Movimiento independiente fuera de
alcance
Causas probables
Descripción
permite en el estado Motores OFF.
La posición de movimiento independiente de arg está fuera de
Acciones recomendadas
alcance. Posición programada = arg mm.
Asegúrese de que el sistema se encuentre en el estado Motores
Acciones recomendadas
OFF antes de desconectar el módulo de accionamiento.
La desconexión de los módulos de accionamiento sólo se
Ajuste la posición del movimiento independiente.
Compruebe el área de trabajo de la herramienta servo.
50318, Reconexión del módulo de accionamiento
no permitida
50315, Fallo de trayectoria de esquina
Descripción
Descripción
No se debe reconectar el módulo de accionamiento, dado que
Tarea: arg
el sistema no se encuentra en el estado Motores OFF.
La interpolación y el procesamiento se detuvieron antes de la
Consecuencias
trayectoria de esquina debido a uno de los motivos siguientes:
Se ha intentado reconectar el módulo de accionamiento arg,
Retardo de tiempo. Puntos programados muy cerca entre sí.
algo que no está permitido.
El sistema requiere una carga elevada de la CPU. arg
Causas probables
Acciones recomendadas
La reconexión de los módulos de accionamiento sólo se permite
Reduzca el número de instrucciones existentes entre
en el estado Motores OFF.
instrucciones de movimiento consecutivas. Reduzca la
velocidad, utilice puntos más separados o utilice la opción
/CONC. Aumente el valor de Increase ipol_prefetch_time.
Acciones recomendadas
Asegúrese de que el sistema se encuentre en el estado Motores
OFF antes de reconectar el módulo de accionamiento.
Recuperación: arg
50316, Absolute Accuracy no activada
50319, Imposible activar la unidad mecánica
Descripción
Descripción
Se ha intentado activar la unidad mecánica arg, sin éxito.
La función Absolute Accuracy no está activada para el robot
Consecuencias
arg.
La unidad mecánica permanece desactivada.
Consecuencias
El posicionamiento del robot no será absolutamente exacto.
Causas probables
La unidad mecánica está conectada al módulo de accionamiento
arg, que está desconectado.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
369
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
Acciones recomendadas
Acciones recomendadas
Reconecte el módulo de accionamiento. Reintente la activación
Asegúrese de que el robot se encuentre en el modo de control
de la unidad mecánica.
de posiciones antes de usar la instrucción FCCalib.
50320, Módulo de accionamiento ha sido
desconectado
50325, Imposible activar el control de fuerza
Descripción
Fallo al activar el control de fuerza.
El módulo de accionamiento arg ha sido desconectado.
Descripción
Causas probables
Consecuencias
El sistema no está calibrado o ya se encuentra en el modo de
No es posible utilizar ninguna de las unidades mecánicas
control de fuerza. Otro motivo puede ser la existencia de
conectadas al módulo de accionamiento.
argumentos incorrectos.
Acciones recomendadas
50321, Módulo de accionamiento ha sido
reconectado
Utilice únicamente la instrucción FCAct o FCPress1LStart si el
Descripción
modo de control de posiciones. Compruebe todos los
El módulo de accionamiento arg ha sido reconectado tras una
argumentos de la instrucción de activación.
sistema de control de fuerza está calibrado y está activado el
desconexión.
50326, Imposible desactivar el control de fuerza
Consecuencias
Es posible utilizar todas las unidades mecánicas conectadas
Descripción
al módulo de accionamiento arg.
Imposible volver al modo de control de posiciones.
Causas probables
50322, Unidad mecánica no conectada a ninguna
tarea de movimiento
Imposible activar el control de posiciones si el robot se está
Descripción
Acciones recomendadas
Imposible activar la unidad mecánica arg porque no está
Detenga las referencias activas y elimine las fuerzas externas
conectada a ninguna tarea de movimiento.
antes de volver a intentarlo.
moviendo a causa de fuerzas externas o referencias solicitadas.
Acciones recomendadas
Compruebe la conexión entre la unidad mecánica y la tarea
RAPID en la configuración del tema Controller.
50327, Imposible iniciar referencias
Descripción
Imposible iniciar las referencias especificadas por el usuario.
50323, Imposible leer el sensor de fuerza
Causas probables
Descripción
El inicio de referencias sólo se permite durante el modo de
Imposible devolver la lectura de fuerza calibrada.
control de fuerza.
Causas probables
Acciones recomendadas
El sistema de control de fuerza no está calibrado.
Debe activar el control de fuerza antes de intentar iniciar
Acciones recomendadas
referencias.
Utilice la instrucción FCCalib antes de utilizar esta instrucción.
50324, Fallo de calibración del control de fuerza
50328, Error de parámetro en FCRefSprForce o
FCRefSprTorque
Descripción
Descripción
Imposible calibrar el sistema de control de fuerza.
Error en el parámetro Stiffness de una instrucción
FCRefSprForce o FCRefSprTorque.
Causas probables
El sistema no se encuentra en el modo de control de posiciones.
Continúa en la página siguiente
370
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
Acciones recomendadas
Causas probables
Cambie el valor del parámetro Stiffness de la instrucción
Se está utilizando el argumento opcional 'DataAtTrigTime' en
FCRefSprForce o FCRefSprTorque a un valor mayor que cero.
la instrucción FCGetProcessData. Si no se ha producido ningún
disparo, se genera este error.
50329, Error de parámetro en FCRefSprForce
Acciones recomendadas
Descripción
Elimine el argumento opcional.
Error en el parámetro MaxForce de una instrucción
FCRefSprForce.
50337, Sensor de fuerza no configurado
Acciones recomendadas
Descripción
Cambie el valor del parámetro MaxForce de la instrucción
Error en los parámetros del sensor de fuerza.
FCRefSprForce a un valor mayor que cero.
Acciones recomendadas
Compruebe los parámetros de sistema del sensor de fuerza.
50330, Error de parámetro en FCRefSprTorque
50338, Error de parámetro en FCCondAdvanced
Descripción
Error en el parámetro MaxTorque de una instrucción
FCRefSprTorque.
Descripción
Error en el parámetro LogicCond de una instrucción
Acciones recomendadas
FCCondAdvanced.
Cambie el valor del parámetro MaxTorque de la instrucción
FCRefSprTorque a un valor mayor que cero.
Acciones recomendadas
Modifique el valor del parámetro LogicCond en la instrucción
FCCondAdvanced.
50333, Error FCRefLine, FCRefRot o FCRefCircle
50339, Error de parámetro en FCCondTime
Descripción
El parámetro Distance de la instrucción FCRefLine o la
instrucción FCRefRot y los parámetros Radius y Speed de la
Descripción
Error en el parámetro Time de una instrucción FCCondTime.
instrucción FCRefCircle deben ser mayor que cero.
Acciones recomendadas
Acciones recomendadas
Cambie el valor del parámetro Time de la instrucción
Cambie los parámetros anteriores de acuerdo con el manual.
50335, Error de parámetro en FCRefSpiral
Descripción
Se utiliza un valor de parámetro no permitido en la función
FCRefSpiral.
FCCondTime a un valor mayor que cero.
50340, Error en la definición del rectángulo de
control de fuerza
Descripción
Se ha producido un error en el parámetro Box de una
Causas probables
instrucción FCCondPos o FCSupvPos.
Error en los valores de los parámetros de la función
FCRefSpiral.
Acciones recomendadas
Cambie el valor del parámetro Box en la instrucción FCCondPos
Acciones recomendadas
o FCSupvPos.
Modifique los valores de los parámetros de la función
50341, Error en la definición del cilindro de
control de fuerza
FCRefSpiral.
50336, Error de parámetro en FCGetProcessData
Descripción
Descripción
Se ha producido un error en el parámetro Cylinder de una
Imposible obtener información del proceso.
instrucción FCCondPos o FCSupvPos.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
371
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
Acciones recomendadas
Consecuencias
Cambie el valor del parámetro Cylinder en la instrucción
No es posible continuar hasta que el motor se enfríe.
FCCondPos o FCSupvPos.
50348, Error de definición de la señal de registro
50342, Error en la definición de la esfera de
control de fuerza
Descripción
Descripción
arg.
Se ha producido un error en el parámetro Sphere de una
instrucción FCCondPos o FCSupvPos.
Acciones recomendadas
La definición de una señal ha fallado en arg, eje arg y canal
Causas probables
El número de la señal no se corresponde con ninguna señal
de registro real.
Cambie el valor del parámetro Sphere en la instrucción
50349, Misma ID de sincronización
FCCondPos o FCSupvPos.
50343, Error en la definición del cono de control
de fuerza
Descripción
Descripción
Dos instrucciones de movimiento sincronizadas consecutivas
de arg tienen el mismo valor de ID de sincronización, arg.
Consecuencias
Error en los parámetros de FCCondOrient o FCSupvOrient.
Si se repite el valor de ID en más de una instrucción de
Acciones recomendadas
movimiento, puede resultar muy difícil hacer un seguimiento
Cambie los parámetros de FCCondOrient o FCSupvOrient.
para determinar qué instrucciones de movimiento están
sincronizadas. Por ejemplo, esto puede causar problemas a la
50344, Ejes fuera de límites en el control de
fuerza
hora de modificar posiciones.
Descripción
Cambie la instrucción de movimiento sincronizada arg de arg
Hay uno o varios ejes fuera de su área de trabajo en el control
de forma que tenga un valor de ID de sincronización exclusivo.
Acciones recomendadas
de fuerza.
50350, Ecualización de software no permitida
Acciones recomendadas
Modifique el programa para evitar los límites físicos de los ejes.
Descripción
No es posible ejecutar la ecualización de software porque el
50345, Error de supervisión de control de fuerza
movimiento independiente está activado.
Descripción
Acciones recomendadas
Se ha disparado la supervisión especificada por el usuario. El
Asegúrese de que los movimientos independientes no estén
tipo es arg.
activados al ejecutar un punto de servo con ecualización de
Tipos: Posición de TCP. Orientación de herramienta. Velocidad
software.
de TCP. Velocidad de reorientación. Fuerza. Par. Velocidad de
TCP programada. Velocidad de reorientación programada.
50351, Movimiento independiente no permitido
Consecuencias
Descripción
El robot se detendrá.
No es posible ejecutar un movimiento independiente mientras
la ecualización de software esté activa.
Acciones recomendadas
Desactive el control de fuerza.
Acciones recomendadas
Modifique la supervisión o el programa.
Asegúrese de que la ecualización de software esté desactivada
al ejecutar un movimiento de pistola independiente.
50346, Error de temperatura del motor
Descripción
La temperatura de motor del eje arg es excesiva.
Continúa en la página siguiente
372
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50352, Número no coincidente de instrucciones
de movimiento
Acciones recomendadas
Para permitir una fuerza de referencia mayor, necesita actualizar
los parámetros del sistema. Recuerde que hay un límite
Descripción
El uso de Path Recorder dentro del movimiento sincronizado
requiere:
Que el offset de la herramienta esté presente en todas las tareas
de programa que cooperen entre sí, o que no esté presente en
ninguna.
absoluto de tamaño de fuerza de referencia, que depende del
tipo de robot.
50355, Referencia de par solicitada demasiado
grande
Que todas las tareas de programa que cooperen entre sí se
Descripción
muevan hacia atrás o hacia delante el mismo número de
La referencia de par solicitada es más grande que el valor
instrucciones de movimiento.
máximo configurado.
Acciones recomendadas
Consecuencias
Compruebe que todas las tareas utilicen el argumento opcional
El par solicitado ha sido reducido al valor máximo configurado.
Tool Offset o que ninguna lo use.
Acciones recomendadas
Compruebe que el identificador Path Recorder con movimiento
hacia delante esté en la misma posición en todas las tareas
Para permitir un par de referencia mayor, necesita actualizar
los parámetros del sistema.
del mismo bloque sincronizado.
50353, Imposible leer los datos de la tarjeta
codificadora
50356, La fuerza MaxForce solicitada es
demasiado grande
Descripción
Descripción
El valor del parámetro MaxForce de la instrucción
El sistema no ha podido leer los datos de una tarjeta
codificadora.
FCRefSprForce es más grande que el valor máximo
configurado.
Consecuencias
Consecuencias
La exactitud de seguimiento durante la aceleración y
deceleración puede reducirse.
El parámetro MaxForce ha sido reducido al valor máximo
configurado.
Causas probables
Acciones recomendadas
Se ha especificado un nombre de unidad incorrecto en el
parámetro de proceso de arg.
Para permitir un valor mayor, necesita actualizar los parámetros
del sistema.
Acciones recomendadas
Compruebe que haya especificado el nombre de unidad
correcto en el parámetro de proceso de nombre de unidad de
E/S de arg.
50357, El par MaxTorque solicitado es demasiado
grande
Descripción
50354, Referencia de fuerza solicitada demasiado
grande
Descripción
El valor del parámetro MaxTorque de la instrucción
FCRefSprTorque es más grande que el valor máximo
configurado.
Consecuencias
La referencia de fuerza solicitada es más grande que el valor
máximo configurado.
El parámetro MaxTorque ha sido reducido al valor máximo
configurado.
Consecuencias
Acciones recomendadas
La referencia de fuerza solicitada ha sido reducida al valor
configurado.
Para permitir un valor mayor, necesita actualizar los parámetros
del sistema.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
373
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50358, Cerca de singularidad con el control de
fuerza activado
Consecuencias
Descripción
Acciones recomendadas
Cerca de singularidad mientras el modo de control de fuerza
Mueva los punteros de programa e inténtelo de nuevo.
No es posible reiniciar los programas desde la posición actual.
estaba activado para el robot arg.
50364, Eje en el modo de vector actual
Acciones recomendadas
Modifique la trayectoria para alejarse de la singularidad o
Descripción
cambie la interpolación de los ejes.
El eje arg está configurado en los datos de arg como un eje de
vector actual. El sistema de accionamiento se desconectará
50359, Uso de Path Recorder no permitido en el
nivel StorePath
de este eje durante el funcionamiento normal.
Descripción
Ejecute la rutina de servicio para activar el vector actual.
Path Recorder sólo puede usarse en el nivel de trayectoria
Cambie el valor del parámetro 'Current Vector On' del tema
básico. Se ha detenido Path Recorder.
Motion y el tipo Drive System a No para el funcionamiento
Acciones recomendadas
normal.
Acciones recomendadas
Detenga Path Recorder antes que StorePath, reiníciela a
continuación de RestoPath.
50366, Error de referencia
Descripción
50361, Error de liberación de frenos
Se ha producido un error en el cálculo de referencia del
planificador de movimientos arg. Estado interno arg.
Descripción
Error de posición excesiva del eje arg tras la liberación del
Consecuencias
freno.
El controlador pasa al estado Motores OFF
Causas probables
Acciones recomendadas
El eje ha colisionado o se ha bloqueado justo antes de que se
Compruebe los registros de errores para encontrar errores
produjera el error.
anteriores que podrían estar causando este problema.
Intente reiniciar el programa, posiblemente tras mover el
Acciones recomendadas
Pruebe unas cuantas veces. Compruebe los cables y el
hardware. Compruebe el ajuste si el error se da en un eje
adicional.
puntero de programa.
Reinicie el controlador.
50367, Paro de máquina de Sensor Sync
50362, Tiempo límite agotado al liberar los frenos
Descripción
El dispositivo Sensor Sync arg ha activado la señal de paro de
Descripción
El eje arg no se encontraba en posición tras el tiempo máximo
máquina arg.
Acciones recomendadas
de liberación de frenos.
No reinicie el robot antes de abrir la máquina. Sensor Sync
Acciones recomendadas
Inténtelo una vez más. Compruebe los cables. Compruebe el
hardware. Compruebe el ajuste si el error corresponde a un
desactivado.
eje adicional.
50368, Distancia demasiado corta entre eventos
equidistantes
50363, Fallo de SyncMoveOn
Descripción
Los eventos están demasiado cerca el uno del otro. Fin de
Descripción
Fallo de inicio del movimiento sincronizado debido a un error
interno.
recursos internos (eventos).
Tarea: arg
Ref. de programa arg
Continúa en la página siguiente
374
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50372, Fuerza de contacto excesiva
Acciones recomendadas
Aumente la distancia entre eventos equidistantes o utilice
posiciones intermedias para reducir la longitud del segmento.
50369, Fallo de calibración utilizando el offset
almacenado
Descripción
La fuerza de contacto es excesiva durante la fase de
recuperación.
Causas probables
La trayectoria programada en la función de recuperación crea
Descripción
fuerzas de contacto excesivas.
Imposible calibrar el sensor usando el offset almacenado.
Acciones recomendadas
Consecuencias
Compruebe y modifique la función de recuperación o permita
El sistema de control de fuerza no está calibrado. No es posible
una fuerza de contacto superior.
activar el control de fuerza.
Causas probables
La calibración con un offset almacenado sólo es posible si se
ha realizado anteriormente una calibración normal.
50370, Fallo de transferencia de datos a la
memoria del robot
50373, Tiempo de evento preestablecido
demasiado prolongado
Descripción
El tiempo de evento preestablecido que se ha configurado es
demasiado prolongado. El valor máximo es arg.
Consecuencias
Descripción
El tiempo de evento preestablecido se reduce al valor máximo.
Transferencia de datos de la memoria del controlador a la del
robot no permitida o interrumpida en el caso de la unidad
mecánica arg debido a la desconexión de la tarjeta de medida
Causas probables
Este error puede producirse en el caso de los robots que tienen
una resolución dinámica baja y un tiempo de evento
serie.
preestablecido prolongado. Se debe a las limitaciones de la
Causas probables
memoria del ordenador.
La tarjeta de medida serie fue desconectada antes de la
calibración o durante la misma, o durante el movimiento manual
Acciones recomendadas
Reduzca el parámetro de sistema de tiempo de evento
de datos a la memoria del robot.
preestablecido del tema Motion y del tipo Motion Planner a un
Acciones recomendadas
valor no superior a arg.
Reintente la calibración o mueva manualmente los datos de la
memoria del controlador a la del robot tras reconectar la tarjeta
de medida serie.
50374, Error de paro de programa de FC
SpeedChange
50371, La velocidad programada es excesiva
Descripción
FC SpeedChange no puede detener un robot en el estado de
Descripción
recuperación.
La función de cambio de velocidad sólo se permite con la
Acciones recomendadas
velocidad reducida programada.
Mueva el puntero de programa, realice un movimiento manual
Causas probables
para alejar el robot de la posición actual y reinicie el programa.
La velocidad programada es excesiva.
50375, Carga dinámica excesiva
Acciones recomendadas
Reduzca la velocidad programada o modifique los parámetros
de sistema.
Descripción
El par necesario para el robot arg y el eje arg es excesivo.
Acciones recomendadas
Si utiliza la oscilación, una de estas acciones puede resolver
el problema: Reduzca la frecuencia o la amplitud de la
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
375
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
oscilación de este movimiento. Reduzca la velocidad de
proceso. Compruebe los datos de carga. Incremente el tamaño
de las zonas si está utilizando zonas pequeñas. Incremente la
distancia entre los puntos programados si están cerca. Si usa
Conveyor Tracking: Reduzca la velocidad del transportador.
50376, Fallo de interpolación geométrica.
50379, Unidades mecánicas activas cambiadas
Descripción
Al llamar a RestoPath, todas las unidades mecánicas deben
estar en el mismo estado activo que cuando se llamó a
StorePath.
Acciones recomendadas
Asegúrese de que todas las unidades mecánicas que estuvieran
Descripción
activas al llamar a StorePath sigan activas y que ninguna otra
Tarea. arg.
unidad mecánica esté activa al llamar a RestoPath.
Fallo de interpolación de la geometría deseada.
Ref. de programa arg.
50380, Error de suma de comprobación
(Estado interno: arg).
Descripción
Acciones recomendadas
Amplíe el tamaño de zona, mueva el puntero programado,
cambie la orientación de la herramienta o cambie el método de
Los datos de la memoria del robot para la unidad mecánica arg
tienen una suma de comprobación errónea.
Causas probables
interpolación.
Nueva tarjeta SMB. Sistema apagado antes de finalizar el
50377, Sólo permitida en el control de posición
guardado de los datos.
Acciones recomendadas
Descripción
Esta instrucción sólo se permite si el robot está en el modo de
control de posición.
Cargue nuevos archivos de configuración.
50381, Velocidad demasiado baja.
Causas probables
El error depende de la llamada a una instrucción cuyo uso sólo
Descripción
se permite en el control de posición mientras se está en el
Tarea: arg
modo de control de fuerza.
La velocidad es demasiado baja (resolución numérica).
Ref. de programa arg
Acciones recomendadas
Llame a la instrucción sólo si el robot está en el modo de control
Acciones recomendadas
de posición.
Aumente la velocidad programada.
Compruebe también las demás tareas sincronizadas de una
50378, Error en FCSetMaxForceChangeTune
aplicación Multimove.
Descripción
50382, Error de patrón de oscilación
Valor incorrecto en el parámetro ForceChange de la instrucción
Descripción
FCSetMaxForceChangeTune.
El cálculo del patrón de oscilación ha fallado debido a un error
Consecuencias
interno.
El programa se detendrá.
Acciones recomendadas
Causas probables
El parámetro debe ser mayor que cero y menor que el valor
configurado.
Pruebe a reiniciar el programa.
50383, Error de configuración de Cartesian Soft
Servo
Acciones recomendadas
Cambie el valor del parámetro.
Descripción
Algunos parámetros de sistema de Cartesian Soft Servo no es
válido.
Continúa en la página siguiente
376
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
El sistema no se inicia.
50387, Cartesian Soft Servo en estado casi
inestable
Causas probables
Descripción
Algunos parámetros de sistema se ha cambiado a un valor no
Cartesian Soft Servo está en un estado casi inestable.
Consecuencias
permitido.
Consecuencias
Acciones recomendadas
El robot se detiene como medida de seguridad.
Verifique que todos los parámetros modificados estén dentro
de los límites permitidos.
Causas probables
La amortiguación del sistema es demasiado baja.
50384, Cuaternios de Cartesian Soft Servo no
válidos
Acciones recomendadas
La amortiguación se calcula a partir de una relación de rigidez.
Cambie el valor de 'Stiffness' o 'StiffnessNonSoftDir' en la
Descripción
instrucción CSSAct. Si esto no resuelve el problema, incremente
Los cuaternios de la herramienta, el objeto de trabajo o el
argumento RefOrient de la instrucción CSSAct no son válidos.
Consecuencias
el valor del parámetro de sistema 'Damping stability limit' o
cambie el parámetro 'Stiffness to damping ratio' del tema Motion
y del tipo CSS.
Cartesian Soft Servo no se activa.
Compruebe los cuaternios de la herramienta, el objeto de
50388, Error de supervisión de posición de
Cartesian Soft Servo
trabajo o el argumento RefOrient de la instrucción CSSAct.
Descripción
Acciones recomendadas
Se ha disparado el cambio de modo de la supervisión de
50385, Fallo de activación de Cartesian Soft
Servo
posición definida por el usuario en Cartesian Soft Servo.
Descripción
El robot se detiene.
La instrucción CSSAct ha fallado.
Consecuencias
Causas probables
Causas probables
El error de posición es mayor que el rango permitido
Cartesian Soft Servo ya estaba activado.
especificado en la configuración.
Acciones recomendadas
Acciones recomendadas
Cartesian Soft Servo debe ser desactivado para poder activarlo
Incremente el valor de error de posición permitido en la
de nuevo.
configuración o modifique el programa.
50386, Fallo de activación de desplazamiento de
Cartesian Soft Servo
50389, Singularidad de Cartesian Soft Servo
Descripción
El robot está demasiado cerca de la singularidad, lo cual afecta
La instrucción CSSForceOffsetAct ha fallado.
al comportamiento de Cartesian Soft Servo.
Consecuencias
Consecuencias
El offset de fuerza no fue activado.
El comportamiento del robot será distinto del especificado.
Causas probables
Acciones recomendadas
La instrucción CSSForceOffsetAct sólo se permite si Cartesian
Modifique el programa para evitar la singularidad.
Descripción
Soft Servo está activado.
Acciones recomendadas
Active Cartesian Soft Servo con la instrucción CSSAct antes
de usar la instrucción CSSForceOffsetAct.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
377
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50390, Supervisión de velocidad de Cartesian
Soft Servo
ruta programada en las direcciones no pertenecientes al servo
Descripción
Acciones recomendadas
Se ha disparado el cambio de modo de la supervisión de
Asegúrese de que la dirección indicada en CSSForceOffsetAct
velocidad definida por el usuario en Cartesian Soft Servo.
sea compatible con la dirección indicada en CSSAct.
Consecuencias
suave.
50394, La trayectoria de la unidad se ha eliminado
El robot se detiene.
Descripción
Causas probables
El error de velocidad es mayor que el rango permitido
El robot arg está semicoordinado con la unidad arg de otra
tarea y la trayectoria de la unidad ha sido borrada.
especificado en la configuración.
Esto puede ocurrir después de un modpos, SyncMoveOff,
Acciones recomendadas
SyncMoveSuspend, ActUnit, DeactUnit, ClearPath o si la unidad
Incremente el valor de error de velocidad permitido en la
configuración o modifique el programa.
50391, Movimiento de Cartesian Soft Servo no
permitido
no tiene ninguna instrucción de movimiento con una posición
bien definida antes de comenzar el movimiento semicoordinado.
La posición de la unidad arg no puede leerse desde otras
tareas.
Consecuencias
Descripción
La ejecución o el reinicio del programa serán interrumpidos.
Se ha detectado movimiento manual o un movimiento
programado.
Acciones recomendadas
Si modpos mueve la posición programada de la unidad cuando
Consecuencias
el robot se encuentra semicoordinado con la unidad, ejecute
La orden de movimiento no se tiene en cuenta.
paso a paso la unidad hasta la nueva posición para definir la
Acciones recomendadas
trayectoria y mueva el PP del programa del robot para reiniciar
El movimiento durante Cartesian Soft Servo sólo se permite si
el programa. Asegúrese de que la unidad arg disponga de una
se ha utilizado el modificador AllowMove en la instrucción
instrucción de movimiento con un punto fino hasta una posición
CSSAct.
bien definida y que todos los programas dispongan de una
WaitSyncTask antes y después del movimiento semicoordinado.
50392, Error de comunicación de SafeMove
Asegúrese de que la unidad no se mueva durante el movimiento
semicoordinado. Recuerde que la instrucción WaitSyncTask
Descripción
también resulta necesaria después de la semicoordinación,
La comunicación con el controlador de SafeMove en el Drive
antes de SyncMoveOn y SyncMoveResume.
Module arg ha fallado.
No es posible realizar pruebas de frenos.
50396, Error de supervisión de fuerza
predeterminada de FC
Acciones recomendadas
Descripción
Compruebe si el hardware de SafeMove está conectado.
La supervisión de fuerza predeterminada se ha disparado
Consecuencias
porque las fuerzas programadas o las fuerzas externas medidas
50393, Offset de fuerza no aplicado en la
dirección del servo suave
son mayores que el límite de seguridad del tipo de robot.
Descripción
El robot se detendrá.
La dirección de offset de fuerza indicada en CSSForceOffsetAct
no es la misma que la dirección suave especificada en CSSAct.
Consecuencias
Consecuencias
Acciones recomendadas
Modifique el programa para reducir la fuerza externa total que
actúa en el robot.
El robot no resultará más fácil de presionar en la dirección
suave. También pueden existir desviaciones de posición de la
Continúa en la página siguiente
378
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50397, Error de velocidad de rotación de la base
de coord. de la trayectoria
50400, Error de configuración de movimientos
Descripción
El parámetro disconnect_link_at_deactivate de
La velocidad de rotación de la base de coordenadas de la
MEASUREMENT_CHANNEL era incoherente con
trayectoria es demasiado elevada al utilizar FC Machining con
measurement_link arg. Todos los canales del mismo enlace
ForceFrameRef cambiado a FC_REFFRAME_PATH.
deben tener el mismo valor en este parámetro.
Consecuencias
Acciones recomendadas
El robot se detendrá.
Compruebe el archivo de configuración.
Descripción
Utilice unos parámetros de sistema correctos y restablezca el
Acciones recomendadas
Reduzca la velocidad programada, agrande las zonas de
sistema.
esquina o reduzca la distancia existente entre la trayectoria
50401, Fallo de sincronización de inicio
programada y la superficie.
Descripción
50398, El círculo comienza con un cambio de
sistema de coordenadas
El relé de sistema 'arg' está definido pero no se recibió ninguna
Descripción
Acciones recomendadas
Tarea: arg.
Asegúrese de que la 'Input signal' del relé esté configurada y
Si se dispone de la opción Absolute Accuracy o Conveyor, las
conectada, y de que todos los sistemas sincronizados se inicien
instrucciones MoveC estén coordinadas con otra unidad
simultáneamente.
respuesta durante el inicio (con una espera de arg minutos).
mecánica deben usar la misma herramienta y el mismo objeto
de trabajo que la instrucción de movimiento anterior.
50402, Corrección no terminada en un punto fino
Consecuencias
Descripción
El robot se detendrá.
Tarea: arg
Acciones recomendadas
La última instrucción de movimiento con corrección
Traslade la instrucción de movimiento a antes de arg, de forma
especificada debe ser un punto fino.
que ambas utilicen las mismas bases de coordenadas. Como
Ref. de programa arg
alternativa, añada una instrucción MoveL (redundante) al punto
Acciones recomendadas
inicial del arco de círculo, con las mismas bases de
Cambie el valor del parámetro zone a fine.
coordenadas que la instrucción MoveC.
50403, Tarjeta de AW no conectada
50399, Círculo Absolute Accuracy como primera
instrucción de movimiento
Descripción
Durante la puesta en marcha, no se ha establecido ninguna
Descripción
comunicación con la unidad <arg> en el bus <arg>.
Tarea: arg.
Si se tiene la opción Absolute Accuracy, MoveC no puede ser
la primera instrucción de movimiento.
Consecuencias
Consecuencias
No es posible utilizar la unidad ni las señales que contiene
dado que en este momento la unidad no se está comunicando
con el controlador.
El robot se detendrá.
Causas probables
Acciones recomendadas
Bien la unidad no está conectada al sistema o bien está
Añada una instrucción de movimiento antes de arg, con la
conectada pero tiene asignada una dirección incorrecta.
misma herramienta y las mismas bases de coordenadas.
Acciones recomendadas
Asegúrese de todas las direcciones de las unidades se
correspondan con la configuración. Asegúrese de que todas
las direcciones sean exclusivas y que no sean utilizadas por
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
379
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
más de una unidad. Cambie la dirección y/o conecte la unidad
Acciones recomendadas
que faltaba. Si ha cambiado la dirección, debe apagar y
Si desea un arco circular, cambie el objetivo correspondiente
encender de nuevo la alimentación de la unidad para garantizar
de forma que esté en el plano del círculo.
que la dirección quede cambiada.
50407, Eje de muñeca bloqueado
50404, Movimiento de eje adicional durante
interpolación de muñeca
Descripción
Descripción
Ref. de programa arg
Tarea: arg
Imposible realizar la interpolación de muñeca con arg porque
Ref. de programa arg
el eje arg está bloqueado.
Se ha programado un eje adicional para que se mueva durante
la interpolación de la muñeca.
Tarea: arg
Consecuencias
La ejecución de la tarea se detendrá.
Consecuencias
Acciones recomendadas
La ejecución de la tarea se detendrá.
Cambie a otra combinación de ejes de muñeca que no suponga
Acciones recomendadas
el uso del eje bloqueado. Recuerde que el robot debe tener al
Asegúrese de que no se haya programado el movimiento de
menos dos ejes móviles en la muñeca para poder hacer la
un eje adicional durante la interpolación de la muñeca.
interpolación de muñeca.
50405, Movimiento coordinado durante
interpolación de muñeca
50408, Límite de ejes de muñeca
Descripción
Tarea: arg
Tarea: arg
Ref. de programa arg
Ref. de programa arg
Imposible realizar la interpolación de muñeca porque el eje de
Se ha intentado realizar una interpolación de muñeca frente a
robot arg vulneraría un límite de ejes.
una base de coordenadas en movimiento.
Consecuencias
Descripción
Consecuencias
La ejecución de la tarea se detendrá.
La ejecución de la tarea se detendrá.
Acciones recomendadas
Acciones recomendadas
Seleccione otra configuración de robot u otra combinación de
Elimine la coordinación de movimientos mientras se realiza la
ejes de muñeca.
interpolación de la muñeca.
50409, Interpolación de muñeca imposible
50406, Punto de interpolación de muñeca no en
el plano del círculo
Descripción
Descripción
Ref. de programa arg
Tarea: arg
La interpolación de muñeca programada no es cinemáticamente
Ref. de programa arg
posible con arg.
El objetivo arg no se encuentra en el plano del círculo. La
desviación es de arg mm.
Tarea: arg
Consecuencias
La ejecución de la tarea se detendrá.
p1 = punto de inicio
Acciones recomendadas
p2 = punto de círculo
Seleccione otra configuración de robot u otra combinación de
p3 = punto final
ejes de muñeca. Las combinaciones posibles de ejes de
Consecuencias
muñeca son: Wrist45, Wrist46 y Wrist56.
En un proceso de corte, el orificio cortado no será circular.
Continúa en la página siguiente
380
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50410, Objetivos colineales en un orden
incorrecto
50413, Error de sobrecarga de resistencias de
drenaje
Descripción
Descripción
Tarea: arg
En el módulo de accionamiento arg, la resistencia de frenado
Ref. de programa arg
conectada a la unidad de rectificación de la posición de unidad
Los objetivos programados son colineales, pero el punto final
de accionamiento arg estaba sobrecargada.
está entre el punto de inicio y el punto de círculo.
Consecuencias
Consecuencias
No podrá realizar ninguna operación hasta que la resistencia
La ejecución de la tarea se detendrá.
de frenado se haya enfriado. El sistema pasa a Motors Off.
Acciones recomendadas
Causas probables
Si desea una línea recta, deje que el punto de círculo y el punto
Es posible que el programa del usuario contenga demasiada
final intercambien sus posiciones.
deceleración de los ejes del manipulador. Es más probable que
se produzca este fallo si el sistema contiene ejes adicionales.
50411, Sobrepasada la carga de TCP programada
máxima permitida
La resistencia de frenado tiene una resistencia incorrecta.
Cortocircuito en el cable de motor de fase a fase o de fase a
tierra.
Descripción
La carga de TCP definida actualmente para el robot arg
Acciones recomendadas
sobrepasa la carga máxima permitida para el modelo de robot.
Escriba de nuevo el programa del usuario para reducir la
cantidad de altas deceleraciones. Desconecte la resistencia de
Consecuencias
frenado, compruebe el cable y mida la resistencia. La
El robot se detendrá.
resistencia esperada debe ser de aproximadamente arg ohmios.
Causas probables
Compruebe que no existan cortocircuitos internos ni a tierra
La combinación de la carga actual de la herramienta arg,
en los cables de motor.
la carga útil arg y las cargas adicionales del brazo
arg, arg supera la carga máxima permitida para el modelo
50414, Sobrecarga de resistencias de drenaje
de robot.
Descripción
Acciones recomendadas
En el módulo de accionamiento arg, la resistencia de frenado
Asegúrese de que la carga total del TCP esté dentro del
diagrama de carga del robot.
conectada a la unidad de rectificación de la posición de unidad
de accionamiento arg está próxima a la sobrecarga.
50412, Error en instrucción de ajuste de cambio
de velocidad
Consecuencias
La operación será posible pero el sistema se acerca a un error
de paro.
Descripción
La instrucción de ajuste de cambio de velocidad ha generado
un error.
Causas probables
Es posible que el programa del usuario contenga demasiada
deceleración de los ejes del manipulador. Es más probable que
Consecuencias
se produzca este fallo si el sistema contiene ejes adicionales.
El robot se detendrá.
La resistencia de frenado tiene una resistencia incorrecta.
Causas probables
Cortocircuito en el cable de motor de fase a fase o de fase a
La instrucción de ajuste de cambio de velocidad no estaba
tierra.
permitida o los parámetros indicados no fueron válidos.
Acciones recomendadas
Acciones recomendadas
Escriba de nuevo el programa del usuario para reducir la
Compruebe los valores del parámetro y el tipo de ajuste y
cantidad de altas deceleraciones. Desconecte la resistencia de
asegúrese de que la opción Force Control correcta esté
frenado, compruebe el cable y mida la resistencia. La
instalada y configurada correctamente.
resistencia esperada debe ser de aproximadamente arg ohmios.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
381
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
Compruebe que no existan cortocircuitos internos ni a tierra
en los cables de motor.
50415, Error de temperatura del motor
50417, Error de sobrecarga de la unidad de
accionamiento
Descripción
La unidad de accionamiento del eje arg ha alcanzado un nivel
Descripción
de temperatura excesivo. El eje está conectado al módulo de
La temperatura de motor del eje arg es excesiva.
accionamiento arg con la unidad de accionamiento de la
posición de unidad arg y el nodo arg.
Consecuencias
No es posible continuar hasta que el motor se enfríe. El sistema
Consecuencias
pasa a Motors Off.
No podrá realizar ninguna operación hasta que el accionamiento
se haya enfriado. El sistema pasa a Motors Off.
Causas probables
Es posible que el programa del usuario contenga una
Causas probables
aceleración y una deceleración demasiado elevadas del eje.
El eje puede estar funcionando con un par excesivo durante
El par de gravedad o fuerzas externas ejercidos sobre el eje
periodos prolongados. Cortocircuito en el manipulador con
también pueden ser demasiado elevados.
cables de motor largos.
Acciones recomendadas
Acciones recomendadas
Escriba de nuevo el programa del usuario para reducir la
Si es posible, escriba de nuevo el programa del usuario para
utilización de los motores.
reducir las aceleraciones y deceleraciones elevadas. Reduzca
Si se produce un error incluso con el motor frío debido a una
el par estático debido a la gravedad o fuerzas externas.
refrigeración adicional o una baja temperatura ambiente, la
Compruebe si existe algún cortocircuito en el cable de motor
sensibilidad de la supervisión térmica puede verse reducida.
o en el motor. Compruebe si hay otros registros de eventos de
Reduzca el parámetro del sistema 'Thermal Supervision
hardware.
Sensitivity Ratio' del tema Motion y el tipo Arm en pasos de
50418, Sobrecarga de la unidad de accionamiento
0,1.
¡AVISO!: ¡Con un valor demasiado bajo, la supervisión se
desactiva y el motor puede sobrecalentarse y quedar destruido!
50416, Temperatura del motor cerca del máximo
Descripción
Descripción
La unidad de accionamiento del eje arg, conectado al sistema
de accionamiento arg con la unidad de accionamiento en la
posición de unidad arg y el nodo arg, se acerca a un nivel de
temperatura excesivo.
La temperatura de motor del eje arg se acerca a su valor
máximo.
Consecuencias
Es posible continuar, pero el margen hasta la temperatura
Consecuencias
máxima es demasiado estrecho para un funcionamiento
Es posible continuar, pero el margen hasta la temperatura
prolongado.
máxima permitida es demasiado estrecho para mantener el
funcionamiento mucho tiempo.
Causas probables
El eje puede estar funcionando con un par excesivo durante
Causas probables
periodos prolongados. Cortocircuito en el manipulador con
Es posible que el programa del usuario contenga una
cables de motor largos.
aceleración y una deceleración demasiado elevadas del eje.
El par de gravedad o fuerzas externas ejercidos sobre el eje
también pueden ser demasiado elevados.
Acciones recomendadas
Si es posible, escriba de nuevo el programa del usuario para
reducir las aceleraciones y deceleraciones elevadas. Reduzca
Acciones recomendadas
el par estático debido a la gravedad o fuerzas externas.
Escriba de nuevo el programa del usuario para reducir la
Compruebe si existe algún cortocircuito en el cable de motor
utilización de los motores.
o en el motor. Compruebe si hay otros registros de eventos de
hardware.
Continúa en la página siguiente
382
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50419, Error de base_frame común
Acciones recomendadas
Asegúrese de que el parámetro de sistema 'Single To Track'
Descripción
del tema Process y del tipo Can Interface hace referencia a una
Tarea: arg.
Una tarea distinta del robot ha desplazado la base del bastidor,
y no se ha podido resolver, motivo arg: SingArea\Wrist no
compatible con MoveC. El primer motion_group sincronizado
debe desplazar la base del bastidor. Sólo es posible gestionar
unidad sencilla 'Indexing Move' del tema Motion y del tipo Single
Type se ha establecido en 'Yes'.
50422, Error de ejes IndCnv e independientes
una base del bastidor. Absolute Accuracy no compatible con
Descripción
MoveC. La base del bastidor común solamente se puede
No se permite el uso de instrucciones de ejes independientes
resolver en un movimiento sincronizado. Ref. de programa arg.
si la unidad sencilla arg está en el modo indexado.
Acciones recomendadas
Consecuencias
Utilice SingArea\Off. También puede utilizar CirPathMode.
La ejecución del programa se detiene.
Compruebe la configuración del controlador y del movimiento.
Utilice MoveL o elimine Absolute Accuracy. Utilice MoveAbsJ.
Acciones recomendadas
Ejecute la instrucción de RAPID IndCnvReset antes de usar el
eje como un eje independiente.
50420, Error de unidad mecánica IndCnv
Descripción
La unidad mecánica arg no está configurada correctamente
para la funcionalidad IndCnv.
50423, Tiempo de IndCnv demasiado breve antes
del movimiento de indexación
Descripción
Consecuencias
El tiempo transcurrido entre la señal de disparo y el inicio del
La ejecución del programa se detiene.
movimiento indexado es demasiado breve.
Causas probables
Consecuencias
La unidad mecánica arg se compone de más de una unidad
La ejecución del programa se detiene.
sencilla.
Acciones recomendadas
La unidad sencilla conectada a arg no es de tipo 'FREE_ROT'.
La unidad sencilla conectada a arg no está definida como una
unidad sencilla de tipo Indexing Move.
Incremente el valor del parámetro del sistema 'Time before
indexing move' del tema Motion y del tipo Single Type a al
menos arg (ms).
Acciones recomendadas
Retire o elimine los límites de aceleración del robot si es
Asegúrese de que la unidad mecánica arg está formada
posible.
solamente de una unidad sencilla.
Consulte el manual de aplicaciones del seguimiento del
Asegúrese de que el parámetro del sistema 'Mechanics' del
transportador para otras acciones.
tema Motion y del tipo Single es del tipo 'FREE_ROT'.
Asegúrese de que el parámetro del sistema Indexing Move' del
tema Motion y del tipo Single Type es 'Yes'.
50421, Error de seguimiento de unidad sencilla
IndCnv
50424, Tipo de robot de IndCnv no admitido
Descripción
La funcionalidad de IndCnv no admite el tipo de robot instalado.
Consecuencias
La ejecución del programa se detiene.
Descripción
La unidad sencilla arg no está configurada como una unidad
sencilla de tipo Indexing Move.
Consecuencias
La ejecución del programa se detiene.
50425, El parámetro Friction FFW On no está
activado
Descripción
El ajuste de los parámetros de fricción requiere que 'Friction
FFW On' tenga el valor 'Yes'.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
383
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
El ajuste de fricción para el eje arg no tendrá ningún efecto.
50429, Parámetros CSS de amortiguación
obsoletos.
Acciones recomendadas
Descripción
Cambie el valor del parámetro del sistema 'Friction FFW On' a
Los parámetros de CSS relativos a la amortiguación son
'Yes' para el eje arg en el tipo arg, del tema Motion.
obsoletos. La amortiguación en todas las direcciones se
Consecuencias
configura ahora con la relación de rigidez y amortiguación. Para
50426, Objetos de interpolación agotados
cambiar el comportamiento
de las direcciones no flexibles, utilice los parámetros 'Stiffness
Descripción
Se ha alcanzado el número máximo de objetos de interpolación
in non soft dir'.
disponibles. Esto puede ocurrir si el rendimiento dinámico tiene
Acciones recomendadas
un valor muy reducido, por ejemplo debido al uso del comando
Cambie los parámetros de amortiguación a 'Stiffness in non
AccSet o PathAccLim.
soft dir' de acuerdo con la descripción del manual.
Consecuencias
estado Motors OFF.
50430, Insuficiencia de datos en el computador
de ejes
Acciones recomendadas
Descripción
Incremente el número de objetos incrementando en 1 el valor
El computador de ejes del sistema de accionamiento arg ha
del parámetro de sistema "Use additional interp. object batch"
detectado una insuficiencia de datos desde el ordenador
en la instancia correspondiente del tipo Motion Planner del
principal y por tanto ha detenido la ejecución.
tema Motion.
Consecuencias
La ejecución del programa se detiene y el sistema cambia al
El sistema pasa al estado SYS HALT.
50427, Eje no sincronizado tras la calibración
Causas probables
Descripción
Existe un error/deficiencia de comunicación entre el ordenador
Tras la calibración fina del eje arg, que utiliza una posición de
principal y el ordenador de ejes. Un error anterior ha cambiado
calibración alternativa, el eje no se ha movido a la posición
el sistema a un estado de carga alta de CPU. Carga alta de
sincronizada normal para la actualización del contador de
CPU en el ordenador principal, por ejemplo generada por una
vueltas.
comunicación de E/S frecuente.
Consecuencias
Acciones recomendadas
El sistema desincronizará el eje la próxima vez que realice un
Compruebe si existen otras entradas en el registro de errores.
reinicio o una puesta en marcha.
Compruebe el cableado de Ethernet y el conector tanto en el
ordenador principal como en el ordenador de ejes. Reduzca la
Acciones recomendadas
Borre el cuentarrevoluciones en la posición normal de borrado
carga en el ordenador principal.
del contador de vueltas.
50431, Colisión predicha
50428, Sincronización de software del Safety
Controller iniciada
Descripción
Descripción
Consecuencias
Se ha iniciado el procedimiento de sincronización del software
Los robots se detendrán inmediatamente.
del Safety Controller.
Se ha predicho una colisión entre los objetos 'arg' y 'arg'.
Causas probables
RobotWare ha predicho que uno o varios robots están a punto
de colisionar.
Acciones recomendadas
Mueva el robot en otra dirección si el problema se produjo
durante el movimiento manual Modifique el programa del robot
Continúa en la página siguiente
384
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
para aumentar la separación entre los objetos implicados
Reduzca la distancia de seguridad de los objetos implicados
(en el archivo de configuración de evitación de colisiones) Si
tiene la seguridad de que los objetos implicados no están a
punto de colisionar, pruebe lo siguiente: Compruebe que la
configuración de evitación de colisiones de los objetos
implicados es correcta Compruebe que la definición de base
50434, Posición cambiada al interior del área de
trabajo
Descripción
El eje arg está fuera de su área de trabajo normal cuando se
ejecuta una instrucción de restablecimiento independiente con
el argumento Old.
de coordenadas de la base de los robots implicados sea
Consecuencias
correcta Desactive la evitación de colisiones
La posición se traslada al interior del área de trabajo normal.
Causas probables
50432, Bases de coordenadas de la base
idénticas
El eje se ha alejado demasiado en el modo independiente antes
de IndReset Old.
El área de trabajo normal configurada es demasiado pequeña.
Descripción
Las unidades mecánicas arg y arg tienen bases de coordenadas
Acciones recomendadas
de la base idénticas.
Para evitar este mensaje de evento, devuelva el eje al interior
de su área de trabajo normal antes de ejecutar la instrucción
Consecuencias
Dado que las bases de coordenadas de la base son idénticas,
la evitación de colisiones sólo puede detectar autocolisiones
de robot. Por tanto, no se realizarán comprobaciones de
colisiones entre robots ni entre los robots y el entorno.
IndReset Old o cambiar el PP a Main.
Incremente el área de trabajo normal.
50435, Parámetros de sistema incoherentes
Causas probables
Descripción
Las bases de coordenadas de la base no están definidas
El eje arg presenta un valor incoherente en el parámetro de
correctamente.
sistema "arg" en la instancia arg.
Acciones recomendadas
Consecuencias
Defina las bases de coordenadas de la base, por ejemplo
El sistema no puede ponerse en marcha.
usando la rutina de calibración de bases de coordenadas de
Causas probables
la base.
Dos o más ejes presentan valores diferentes en un mismo
parámetro de sistema.
50433, Posición cambiada al interior del área de
trabajo
Acciones recomendadas
Descripción
los ejes que apunten a la misma instancia o al mismo hardware.
Establezca el mismo valor/nombre en el parámetro para todos
El eje arg está fuera de su área de trabajo normal cuando se
ejecuta una instrucción de restablecimiento independiente.
50436, Error de configuración del robot
Consecuencias
Descripción
La posición se traslada al interior del área de trabajo normal.
No es posible alcanzar la posición programada con la
Causas probables
configuración de robot indicada.
El eje se ha alejado demasiado en el modo independiente.
Tarea: arg
El área de trabajo normal configurada es demasiado pequeña.
Ref. de programa arg
Acciones recomendadas
Causas probables
Para evitar este mensaje de evento, devuelva el eje al interior
La posición programada es tal que el robot no puede alcanzar
de su área de trabajo normal antes de ejecutar la instrucción
la configuración de robot indicada o debe pasar por un punto
IndReset o cambiar el PP a Main.
singular para alcanzar la posición.
Incremente el área de trabajo normal.
Acciones recomendadas
Ejecute el programa paso a paso en el modo manual y
modifique los puntos defectuosos. Recuerde que es posible
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
385
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
continuar en el modo manual dado que sólo se detiene el primer
Acciones recomendadas
intento. El movimiento también puede modificarse mediante
Determine la causa del par elevado. Compruebe si se ha
SingArea\Wrist, ConfL\Off o sustituirse con MoveJ.
producido alguna colisión. Compruebe los datos de carga.
Reduzca la velocidad o la aceleración para conseguir una
50437, El eje seguidor está conectado a
planificador de mov. incorrecto
Descripción
El eje seguidor arg está conectado a un planificador de
reducción de la velocidad. Inspeccione el hardware. Mueva el
puntero de programa y reinicie.
50440, Generador de correcciones perdido
movimientos que presenta un número más bajo que su
Descripción
correspondiente eje maestro arg.
El generador de correcciones se ha eliminado
Consecuencias
Causas probables
El rendimiento de la opción Electronically Linked Motors se
Instrucción CorrDiscon o CorrClear durante el movimiento del
reducirá en comparación con la configuración normal.
robot
Acciones recomendadas
Acciones recomendadas
Cambie la configuración de movimiento de forma que el eje
Espere hasta que el robot alcance el punto fino o inicie el
seguidor arg se encuentre en el mismo planificador de
movimiento sin \Corr
movimientos o en un planificador de movimientos que tenga
un número mayor que el del eje maestro arg.
50441, Tensión insuficiente en las entradas de
batería
50438, Se ha agotado el tiempo límite de la
secuencia Motors OFF
Descripción
Descripción
número de tarjeta arg, indica una tensión insuficiente. Si se
La unidad mecánica arg no ha podido finalizar la secuencia
apaga la alimentación principal, los contadores de vueltas se
Motors OFF durante el tiempo configurado.
perderán.
La tarjeta de medida serie del Drive Module arg, enlace arg y
Tensión de la batería: arg V
Consecuencias
La secuencia de frenado puede finalizarse antes de que los
ejes se hayan detenido.
Tensión externa: arg V
Causas probables
La batería no está conectada o está descargada. Si se está
Acciones recomendadas
Si el tiempo necesario para frenar el eje es más largo que el
valor predeterminado de 5 segundos, incremente el valor
utilizando una alimentación externa, ésta presenta una tensión
insuficiente.
cambiando el valor del parámetro Panel de
Acciones recomendadas
control/Configuración/Temas/Movimiento/Brake/Max Brake
Sustituya la batería. Si se utiliza una alimentación externa,
Time a un valor superior. Inténtelo de nuevo.
inspeccione los cables y la fuente de alimentación.
50439, Fallo de activación de servo suave
50442, Error de configuración de ejes de robot
Descripción
Descripción
No se ha podido cambiar el eje arg al modo de servo suave. El
No es posible alcanzar la posición programada con la
motivo es que el eje ha alcanzado su nivel de par máximo poco
configuración de robot indicada.
tiempo antes de la activación o durante la misma.
Tarea: arg
Ref. de programa arg
Consecuencias
El sistema realiza un paro de emergencia y el comando de
activación del servo suave se cancela.
Robot: arg
Eje: arg
Causas probables
La posición programada es tal que al menos un eje de robot
no puede moverse desde la posición actual hasta la
Continúa en la página siguiente
386
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
configuración de robot indicada o debe pasar por un punto
correctamente. Si la unidad mecánica está expuesta a fuerzas
singular para alcanzar la posición.
de los procesos externos, utilice comandos de RAPID o
parámetros del sistema para aumentar el nivel de supervisión.
Acciones recomendadas
Ejecute el programa paso a paso en el modo manual y
intento. El movimiento también puede modificarse mediante
50445, Activación/desactivación de la
sincronización no permitida mientras la interfaz
de movimiento externa está activa
SingArea\Wrist, ConfL\Off o sustituirse con MoveJ.
Descripción
modifique los puntos defectuosos. Recuerde que es posible
continuar en el modo manual dado que sólo se detiene el primer
No se permite la activación o desactivación del movimiento
50443, Ausencia de objetos de evento internos
sincronizado mientras la interfaz de movimiento externa está
activada.
Descripción
Se asignó un número insuficiente de objetos de evento internos
Consecuencias
para ejecutar la instrucción.
La ejecución del programa se detiene y el sistema cambia al
estado Motors OFF.
Consecuencias
El movimiento de todas las unidades mecánicas se detuvo
Causas probables
inmediatamente.
Se ejecutó SyncMoveOn o SyncMoveOff mientras la interfaz
de movimiento externa estaba activada.
Causas probables
No se asignó un número suficiente de objetos de evento.
Acciones recomendadas
No se permite la ejecución de SyncMoveOn y SyncMoveOff
Acciones recomendadas
Asigne más objetos de evento incrementando el parámetro de
sistema Number of Internal Event Objects del tema Motion y
el tipo Motion Planner; a continuación, reinicie el controlador.
mientras la interfaz de movimiento externa esté activada.
Compruebe la aplicación que está utilizando la funcionalidad
de interfaz de movimiento externa y corrija el programa de
RAPID.
50444, Supervisión del manipulador
Descripción
50446, Tiempo de rampa de External Motion
Interface aumentado
Se ha disparado la detección de brazo suelto para el eje arg
Descripción
de la unidad mecánica arg.
El tiempo de rampa de External Motion Interface se aumentó
Consecuencias
para evitar una velocidad excesiva en la corrección de rampa
El movimiento de la unidad mecánica arg se detendrá
inmediatamente. A continuación, vuelve a la posición de la
descendente arg.
Nuevo tiempo de rampa: arg segundos
trayectoria en la que se estaba ejecutando. Permanecerá en
este punto en el estado Motors ON, en espera de una solicitud
Consecuencias
El tiempo de rampa definido por el usuario se ha aumentado
de inicio.
para evitar la sobrevelocidad.
Causas probables
El disparo de la supervisión del manipulador puede ser causado
por una detección de brazo suelto, una colisión, una definición
incorrecta de las cargas o una fuerza del proceso externo.
Acciones recomendadas
Aumente la velocidad de corrección máxima permitida para
permitir una rampa descendente más rápida o incremente el
tiempo de rampa definido por el usuario.
Acciones recomendadas
Si cualquiera de los brazos paralelos se ha desprendido, fíjelos
nuevamente, confirme el fallo y reanude el funcionamiento
presionando el botón Start (Inicio) del FlexPendant. Si es
50447, Unidades mecánicas incorrectas para
External Motion Interface
posible, confirme el fallo y reanude el funcionamiento
Descripción
presionando el botón Start (Inicio) del FlexPendant. Asegúrese
Una o varias de las unidades mecánicas de la corrección arg
de que todas las cargas estén definidas e identificadas
no se permiten en External Motion Interface.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
387
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
La corrección no se activará.
50450, Error de activación de External Motion
Interface
Causas probables
Descripción
Se ha intentado activar una corrección de External Motion
La activación de la corrección de External Motion Interface arg
Interface con unidades mecánicas que no están activas o no
ha fallado.
Consecuencias
pertenecen a la misma tarea de movimiento.
Consecuencias
Acciones recomendadas
La ejecución del programa se detiene y el sistema cambia al
Compruebe la aplicación que está utilizando la funcionalidad
estado Motors OFF.
External Motion Interface y cambie los parámetros de activación
a las unidades mecánicas correctas.
Causas probables
La comunicación con el origen de la entrada de External Motion
50448, Error en la entrada de External Motion
Interface
Interface, por ejemplo un sensor u otro dispositivo, no pudo
ser configurada correctamente.
Acciones recomendadas
Descripción
Compruebe si existen otros mensajes de error relacionados
Formato no válido para la entrada de External Motion Interface
con los sensores o la comunicación.
de la corrección arg.
Consecuencias
La ejecución del programa se detiene y el sistema cambia al
estado Motors OFF.
50451, Error de desactivación de External Motion
Interface
Descripción
Causas probables
La desactivación de la corrección de External Motion Interface
El formato de le entrada escrita en External Motion Interface
arg ha fallado.
no era válido. Dos motivos posibles son: Los cuaternios
utilizados por External Motion Interface no están normalizados
correctamente. Se han utilizado otros valores numéricos no
válidos como entrada de External Motion Interface.
Consecuencias
La ejecución del programa se detiene y el sistema cambia al
estado Motors OFF.
Causas probables
Acciones recomendadas
Asegúrese de que los datos de entrada de External Motion
Interface sean correctos y reinicie el programa.
50449, Unidad mecánica cerca de límite de eje
La comunicación con el origen de la entrada de External Motion
Interface, por ejemplo un sensor u otro dispositivo, no pudo
ser desactivada correctamente.
Acciones recomendadas
Compruebe si existen otros mensajes de error relacionados
Descripción
con los sensores o la comunicación.
El movimiento creado por la corrección de External Motion
Interface arg está haciendo que la unidad mecánica arg y el
50452, Error cíclico de External Motion Interface
eje arg se muevan demasiado cerca de su límite de eje.
Descripción
Consecuencias
La ejecución del programa se detiene y el sistema cambia al
estado Motors OFF.
La ejecución cíclica de la corrección de External Motion
Interface arg ha fallado.
Consecuencias
Causas probables
Uno o varios ejes se aproximan a su límite de eje.
Acciones recomendadas
Evite los movimientos demasiado cercanos a los límites del
eje o reduzca la máxima velocidad de corrección permitida para
reducir la distancia de paro seguro.
La ejecución del programa se detiene y el sistema cambia al
estado Motors OFF.
Causas probables
La comunicación con el origen de la entrada de External Motion
Interface, por ejemplo un sensor u otro dispositivo, ha fallado.
Continúa en la página siguiente
388
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
Acciones recomendadas
Consecuencias
Compruebe si existen otros mensajes de error relacionados
La ejecución del programa se detiene y el sistema cambia al
con los sensores o la comunicación.
estado Motors OFF.
Causas probables
50453, Movimiento no permitido en External
Motion Interface
La velocidad estaba fuera del rango permitido.
Descripción
Compruebe la aplicación que está utilizando la funcionalidad
La corrección de External Motion Interface arg no está
External Motion Interface para aumentar el valor de velocidad
configurada para permitir instrucciones de movimiento de
máxima permitida.
Acciones recomendadas
RAPID ni el movimiento manual.
Consecuencias
La ejecución del programa se detiene y el sistema cambia al
estado Motors OFF.
50456, Cerca de singularidad con External Motion
Interface activo
Descripción
Causas probables
El robot de la corrección de External Motion Interface arg está
La aplicación que utiliza la funcionalidad External Motion
demasiado cerca de una singularidad.
Interface no permite las instrucciones de movimiento de RAPID
ni el movimiento manual.
Consecuencias
La ejecución del programa se detiene y el sistema cambia al
Acciones recomendadas
estado Motors Off.
Asegúrese de no ordenar ningún otro movimiento mientras
External Motion Interface esté activo.
Causas probables
El robot está cerca de una singularidad, o bien se ha
especificado una tolerancia numérica demasiado pequeña en
50454, Supervisión de posición de External
Motion Interface
los parámetros de sistema.
Descripción
Evite moverse demasiado cerca de la singularidad.
Acciones recomendadas
La posición está fuera del rango permitido para la corrección
de External Motion Interface arg, unidad mecánica arg eje arg.
Consecuencias
La ejecución del programa se detiene y el sistema cambia al
estado Motors OFF.
50457, Fallo de configuración de interfaz de
movimiento externa
Descripción
El sistema no puede leer los parámetros de sistema de la
Causas probables
corrección de interfaz de movimiento externa arg.
La desviación de la posición con respecto a la trayectoria o el
punto fino más reciente excedieron el valor máximo permitido.
Acciones recomendadas
Consecuencias
La ejecución de la tarea se detendrá.
Causas probables
Compruebe la aplicación que está utilizando la funcionalidad
External Motion Interface para aumentar el valor de posición
Hay parámetros incorrectos o ausentes en la configuración de
la corrección.
máxima permitida o modifique las posiciones programadas
para acercarse a la posición deseada.
Acciones recomendadas
Compruebe los parámetros de sistema del tipo External Motion
50455, Supervisión de velocidad de External
Motion Interface
Interface Data del tema Motion.
50458, Velocidad programada demasiado alta
Descripción
La velocidad estaba fuera del rango permitido para la corrección
de External Motion Interface arg, unidad mecánica arg eje arg.
Descripción
La velocidad programada es excesiva para la corrección de
External Motion Interface arg.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
389
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50461, Demasiadas señales lógicas continuas
Consecuencias
La ejecución del programa se detiene y el sistema cambia al
estado Motors OFF.
Descripción
Se ha alcanzado el número máximo de señales lógicas
Causas probables
continuas. No es posible definir señales lógicas adicionales.
La corrección de External Motion Interface no se permite
cuando la velocidad programada es excesiva.
Acciones recomendadas
Reduzca la velocidad programada para la trayectoria
programada.
Consecuencias
La señal lógica requerida no se definirá.
Causas probables
Para evitar una alta carga de CPU, el número máximo de
señales lógicas continuas está limitado a arg. Todas las señales
50459, Entrada de External Motion Interface fuera
de límites
lógicas, excepto las señales de E/S binarias, están
categorizadas como continuas.
Acciones recomendadas
Descripción
Elimine todas las señales lógicas innecesarias.
La entrada de External Motion Interface para la corrección arg
estaba fuera de límites para la unidad mecánica arg eje arg.
Consecuencias
La ejecución del programa se detiene y el sistema cambia al
estado Motors OFF.
50462, Velocidad cartesiana demasiado alta
Descripción
Se ha detectado una velocidad demasiado alta para el punto
central de la muñeca o el punto de control del brazo del robot
Causas probables
arg.
La entrada de External Motion Interface especificada estaba
fuera de los límites de eje de un robot o un eje adicional.
Acciones recomendadas
Asegúrese de que la entrada esté dentro de los límites y reinicie
el programa.
Consecuencias
El sistema realiza un paro de emergencia.
Causas probables
Fuerzas de interferencia externas han provocado un movimiento
demasiado rápido del robot. Consulte el registro de errores
50460, Desactivación de External Motion
Interface no permitida
para determinar si hay otras causas.
Acciones recomendadas
Reduzca la velocidad del robot.
Descripción
La corrección de External Motion Interface arg no puede ser
desactivada mientras las unidades mecánicas estén en
50463, Error de comunicación del servidor de
registro
movimiento.
Descripción
Consecuencias
La ejecución del programa se detiene y el sistema cambia al
estado Motors OFF.
Fallo de envío por la red de las señales registradas.
Estado interno: arg.
Consecuencias
Causas probables
Se ha intentado desactivar una corrección mientras una o varias
unidades mecánicas se están moviendo.
El registro está desactivado y todas las señales definidas se
eliminan.
Causas probables
Acciones recomendadas
Asegúrese de que todos los movimientos y otras correcciones
de External Motion Interface hayan finalizado antes de la
desactivación.
El cliente se ha cerrado sin desconectarse correctamente o se
han producido errores en la red o una carga de CPU demasiado
elevada en el controlador de robot.
Acciones recomendadas
Compruebe las conexiones Ethernet.
Defina menos señales.
Continúa en la página siguiente
390
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50464, Se ha producido una colisión.
Descripción
50468, Límites de velocidad cartesiana
cambiados
Tarea: arg.
Descripción
Se ha producido una colisión. Se puede gestionar en un gestor
Los límites de velocidad cartesiana se han cambiado para el
de errores de RAPID. Si no se gestiona, la ejecución de RAPID
robot arg. El valor actual de Global Speed Limit es arg m/s y
se detendrá.
Arm Check Point Speed Limit es arg m/s.
arg.
El valor anterior de Global Speed Limit anterior era arg m/s y
Arm Check Point Speed Limit era arg m/s. Recuerde que cada
Acciones recomendadas
Compruebe los demás mensajes que se hayan producido en
el mismo momento, para determinar los motivos.
Recuperación: arg.
tipo de robot tiene un límite máximo que no se puede rebasar
incluso si se intenta configurar un valor más alto.
Acciones recomendadas
Compruebe si estos límites son correctos.
50465, Se recomienda ajustar los parámetros de
rigidez del robot
Descripción
50469, Fallo de configuración de eje controlado
por E/S
No se encontraron parámetros de sistema ajustados para
Descripción
Motion Process Mode en el robot arg.
Unidad mecánica arg: falta la señal de E/S arg.
Acciones recomendadas
Consecuencias
Utilice la variante de robot de la aplicación TuneMaster para
La unidad mecánica arg no puede utilizarse.
ajustar y configurar parámetros de Motion Process Mode para
arg.
Causas probables
La señal de E/S requerida arg no está definida.
50466, Conflicto de canal de medición
Acciones recomendadas
La señal de E/S requerida arg debe estar definida.
Descripción
El eje arg está usando el mismo canal de medición arg que otro
eje. Esto sólo se permite si también comparten el mismo
50470, Eje controlado por E/S no preparado para
la activación
sistema de accionamiento.
Descripción
Acciones recomendadas
La señal de E/S arg tiene el nivel bajo.
Compruebe el archivo de configuración.
Utilice unos parámetros de sistema correctos y restablezca el
Consecuencias
La unidad mecánica arg no puede utilizarse.
sistema.
Causas probables
50467, Conflicto de relé de freno
La señal de E/S arg debe tener el nivel alto para la activación.
Descripción
Acciones recomendadas
La unidad mecánica arg comparte el relé de freno con la unidad
La señal de E/S arg debe estar definida.
mecánica arg, pero faltan los parámetros Activate at Start Up
y Deactivation Forbidden.
50471, Eje controlado por E/S no preparado
Esta configuración puede provocar un movimiento inesperado
Descripción
del eje al iniciar el programa, debido a la liberación de los frenos
La señal de E/S arg tiene el nivel bajo.
mientras el eje no está siendo controlado.
Acciones recomendadas
Consecuencias
La unidad mecánica arg no puede utilizarse.
Compruebe el archivo de configuración.
Utilice unos parámetros de sistema correctos y restablezca el
sistema.
Causas probables
La señal de E/S arg debe tener el nivel alto.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
391
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
Acciones recomendadas
Durante el movimiento, utilice el modo de eje por eje u otra
La señal de E/S arg debe estar definida.
dirección de referencia.
50472, Faltan datos de Absolute Accuracy
50476, Error de AxisCal
Descripción
Descripción
Absolute Accuracy está activada pero no existe ningún dato
Datos trasladados de la memoria del robot a la del controlador.
para el robot arg.
Datos de AxisCal no válidos en la memoria del robot. Se han
borrado del controlador los datos AxisCal de la unidad mecánica
Consecuencias
El posicionamiento del robot no será absolutamente exacto.
arg.
Acciones recomendadas
Acciones recomendadas
Asegúrese de que absacc.cfg esté cargado en la memoria del
Cargue nuevos datos de AxisCal si hay datos disponibles.
controlador.
Compruebe que existan datos en una copia de seguridad.
50477, Faltan datos de calibración de los ejes
Descripción
50473, Fallo de configuración de registro ASCII
La unidad mecánica arg se calibra con Calibración de ejes pero
faltan parámetros de sistema del controlador.
Descripción
Archivo de configuración de registro ASCII arg no encontrado
Consecuencias
o incorrecto.
Imposible ejecutar la rutina de servicio Calibración de ejes.
Consecuencias
Acciones recomendadas
La función de registro ASCII no puede utilizarse.
Asegúrese de que la configuración de la calibración de ejes
esté cargada en la memoria del controlador.
Causas probables
El archivo de configuración de registro ASCII arg requerido
Compruebe que existan datos en una copia de seguridad.
falta o es incorrecto.
50478, Imposible desactivar el proceso de guiado
Acciones recomendadas
Verifique el nombre y el directorio del archivo de configuración.
Descripción
Imposible desactivar el modo de guiado porque uno o varios
50474, Objetivo en una singularidad
ejes estaban en movimiento.
Consecuencias
Descripción
El objetivo del robot está cerca de una singularidad porque el
eje arg está demasiado cerca de los arg grados.
El controlador pasa al estado Motors Off.
Causas probables
Uno o varios ejes estaban en movimiento en el modo de guiado
Acciones recomendadas
Durante la ejecución del programa, utilice la instrucción
cuando se envió el comando de desactivación. El controlador
desactivará el modo de guiado cuando el usuario mueva o inicie
SingArea o MoveAbsJ.
Durante el movimiento, utilice el modo de eje por eje.
un programa.
Acciones recomendadas
50475, Objetivo en una singularidad
Asegúrese de que el sistema se encuentre en reposo al
desactivar el modo de guiado.
Descripción
El objetivo del robot está cerca de una singularidad porque el
TCP está demasiado cerca de la dirección de referencia del
ángulo de brazo.
50479, Imposible mover los ejes en el modo
independiente
Descripción
Acciones recomendadas
Durante la ejecución del programa, utilice MoveAbsJ o una
Se realizó un intento de mover uno o varios ejes en el modo
independiente.
dirección de referencia diferente.
Continúa en la página siguiente
392
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50483, Movimiento en un sentido incorrecto
Consecuencias
Los ejes en el modo independiente no pueden tener
movimientos asignados.
Descripción
El movimiento de la posición actual a la posición objetivo al
Acciones recomendadas
abrir arg
Asegúrese de que no esté utilizando el modo independiente al
provocó un movimiento en un sentido incorrecto.
intentar mover el eje. Utilice IndReset para restablecer el eje o
mueva PP a Main para restablecer todos los ejes.
50480, Fallo de RefSync de eje controlado por
E/S
Consecuencias
La secuencia de apertura comenzará con un movimiento de
cierre.
Causas probables
El control de la fuerza del movimiento debe volver a mover la
Descripción
unidad nuevamente hasta la posición de inicio en la que se
Error interno durante refsync o movimiento de robot.
encontraba al asumir el control desde el control de posición,
Consecuencias
antes de volver a entregar el control al control de posición.
La pos. de retroalimentación y la ref. de pos. de eje controlado
En este caso, la posición de inicio para el movimiento
por E/S no están sincronizadas.
provocado por la fuerza está más cerrada que la posición actual
y esto provocará un movimiento de cierre antes de que el
Acciones recomendadas
Espere hasta la velocidad cero y verifique el error interno.
control de posición pueda asumir el control.
La situación indica que se produjo una colisión con la placa
Realice una nueva RefSync.
durante el movimiento de cierre, que el grosor de la placa es
50481, Eje controlado por E/S no sincronizado
incorrecto o que la calibración es incorrecta.
Acciones recomendadas
Descripción
Refsync no finalizada cuando se modifica la señal de E/S arg.
Consecuencias
Asegúrese de que se realice la configuración correcta; por
ejemplo, grosor de la placa. Asegúrese de que la calibración
es correcta.
La pos. de retroalimentación y la ref. de pos. del eje arg
controlado por E/S no están sincronizadas.
Acciones recomendadas
Ejecute IoCtrlAxis_RefSyncOn antes del cambio de la señal
arg o la comprobación del error interno.
50482, Velocidad de búsqueda no alcanzada
50484, Punto de parada demasiado alejado del
círculo
Descripción
Tarea: arg
Ref. de programaarg
El punto de parada detectado durante la ejecución de una
Descripción
instrucción SearchC está demasiado alejado del arco del
Se detectó una coincidencia de búsqueda de colisión en la
círculo. Esto puede ocurrir si se utiliza una zona amplia en la
servopinza antes de que se alcanzara la velocidad máxima de
instrucción de movimiento precedente.
búsqueda.
Consecuencias
Consecuencias
Resultará imposible ejecutar el movimiento hacia atrás.
La exactitud de los resultados puede no ser fiable.
Causas probables
Acciones recomendadas
Se utilizó una zona demasiado amplia en la instrucción de
Compruebe que hay tiempo suficiente para acelerar y que no
movimiento previa a SearchC.
hay nada obstruya la servopinza.
Acciones recomendadas
Utilice una zona más pequeña en la instrucción de movimiento
previa a SearchC.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
393
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50485, Uso de definición antigua del ángulo del
brazo
Acciones recomendadas
Convierta los robtargets del programa de RAPID a la nueva
definición del ángulo del brazo (recomendado) o utilice una
Descripción
El robot de 7 ejes arg está configurado para utilizar la definición
antigua del ángulo del brazo.
versión más antigua de RobotWare.
50489, Distancia de disparo superior a longitud
de movimiento
Consecuencias
Esta definición del ángulo del brazo está obsoleta y será
eliminada en una futura versión. En algunos casos, el uso de
la definición antigua del ángulo del brazo puede provocar un
Descripción
Se han configurado datos de disparo con una distancia superior
a la longitud de movimiento.
movimiento incorrecto del robot.
Acciones recomendadas
Acciones recomendadas
Cambie la definición del parámetro de configuración Arm-Angle
a 'New'. Convierta los robtargets en el programa de RAPID a
la nueva definición del ángulo del brazo.
Compruebe si existen puntos programados demasiado cerca
entre sí. Compruebe el parámetro de distancia en instrucciones
tales como TriggInt, TriggEquip, TriggIO y otras instrucciones
Trigg.
50486, Supervisión de la carga
50490, Error en medición detectado
Descripción
Se ha detectado una discrepancia entre los pares de los ejes
esperados y reales de la unidad mecánica arg durante los
Descripción
Se detectó un error de medición en el eje arg mientras el robot
estaba en el modo de batería (apagado).
últimos arg minutos.
Consecuencias
Consecuencias
Existe riesgo de sobrecarga de la estructura mecánica.
El eje no está sincronizado.
Causas probables
Causas probables
La carga de la unidad mecánica es mayor de lo esperado.
Es posible que el eje se haya movido rápidamente mientras
estaba en el modo de batería.
Acciones recomendadas
Asegúrese de que todas las cargas estén definidas
Acciones recomendadas
Actualice el cuentarrevoluciones del eje. Asegúrese de que el
correctamente.
robot está fijo mientras se transporta, para evitar movimientos
50487, Configuración de movimientos
rápidos.
Descripción
50491, Error de base de coordenadas de la base
de dos brazos
Actualice el parámetro del sistema arg para arg que presenta
el error.
Los cambios no entrarán en vigor hasta que se reinicie el
Descripción
Las unidades mecánicas arg y arg son un sistema de dos
controlador.
brazos, pero presentan datos de base de coordenadas de la
Acciones recomendadas
base diferentes.
Reinicio del controlador
Consecuencias
50488, Uso de una definición de objetivo antigua
La coordinación entre los dos brazos no funcionará. La
predicción de colisiones no funcionará.
Descripción
El objetivo del robot arg utiliza una definición antigua para cfx.
No es compatible con la versión actual de RobotWare.
Causas probables
Los datos de base de coordenadas de la base son distintos en
las dos unidades.
Continúa en la página siguiente
394
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
Acciones recomendadas
error de posición máximo permitido en la posición de
Proporcione a las dos unidades los mismos datos de sistema
recogida/colocación. Parámetro de sistema 'Max tracking error
de base del bastidor.
at pick pos'.
50492, Error durante el movimiento
50497, Se ha alcanzado el número máximo de
ejes en el módulo de accionamiento
Descripción
Se ha intentado mover de algún modo distinto de eje por eje,
Descripción
cuando uno o más cuentarrevoluciones no estaban
El parámetro Joint arg está configurado de tal manera que el
actualizados.
número máximo de ejes en el módulo de accionamiento llega
a superar el máximo permitido (14)
Acciones recomendadas
Utilice el movimiento eje por eje. Actualice los
Acciones recomendadas
cuentarrevoluciones.
Compruebe el archivo de configuración.
Utilice unos parámetros de sistema correctos y restablezca el
50493, LockAxis4 no está admitido
Descripción
La instrucción de movimiento actual no se pudo ejecutar porque
LockAxis4 está activa y el tipo de robot no la admite.
sistema.
50498, Configuración de movimientos
Descripción
Imposible leer el tipo de configuración del tema Motion del
Consecuencias
controlador.
El robot se detendrá.
Causas probables
Causas probables
Uso de SingArea\LockAxis4 con un tipo de robot que no la
Habitualmente se debe a un error de sintaxis o similar en un
archivos de configuración cargado.
admite.
Acciones recomendadas
Acciones recomendadas
Quite la instrucción SingArea\LockAxis4 o cambie el parámetro
Compruebe si ha habido errores de configuración anteriores
en la puesta en marcha. Compruebe el archivo de configuración
del modificador a \Wrist o \Off.
en el paso anterior. Utilice unos parámetros de sistema
50496, Error en la posición de seguimiento del
transportador en recogida
Descripción
correctos y restablezca el sistema.
50499, Se ha excedido la corrección máxima
permitida para la ruta
La posición de TCP para el robot arg está demasiado lejos de
la posición a la que debe llegar en el transportador arg, por
causa de la rampa de velocidad. Error de posición: arg
Descripción
La corrección necesaria para que arg siga la ruta real supera
la corrección máxima permitida. La corrección actual tiene arg
Consecuencias
mm, mientras que la corrección máxima permitida para la ruta
El robot puede fallar la recogida o la colocación.
Causas probables
es de arg mm.
Consecuencias
La rampa de corrección no está terminada al llegar a la posición
La ejecución del programa se detiene.
de recogida.
Causas probables
Acciones recomendadas
La corrección para la ruta es demasiado larga, falla el sensor
Aumente la distancia entre las posiciones de recogida y
o el objeto de trabajo no está colocado correctamente.
colocación para asegurar que la rampa de velocidad está
finalizada. Reduzca la velocidad programada. Reduzca la
longitud de la rampa de velocidad. Ajuste el parámetro de
sistema del inicio de la rampa 'Start ramp' y/o 'Stop ramp' del
tema Process y los sistemas de tipo Conveyor. Aumente el
Acciones recomendadas
Si se desea y se prevé este comportamiento, cambie el
parámetro 'Maximum allowed path correction' del tema Motion
Planner y el tema Motion.
Continúa en la página siguiente
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
395
5 Solución de problemas con ayuda de los registros de eventos
5.7 5 xxxx
Continuación
50500, Funcionalidad en estado beta
Causas probables
Instrucciones de movimiento múltiples con la misma posición
Descripción
El sistema se ha configurado con un valor no predeterminado
para el parámetro dyn_ipol_type. Actualmente, esta
programada o instrucciones de movimiento posteriores con
escasa distancia entre los puntos programados.
funcionalidad está en estado beta y solo debe usarse para fines
Acciones recomendadas
de prueba y evaluación.
Aumente la distancia entre las posiciones programadas.
Elimine las posiciones programadas intermedias repetidas.
Acciones recomendadas
A menos que esté realizando pruebas en colaboración con el
departamento de I+D de ABB Robotics, le recomendamos que
vuelva a dejar este valor en el valor anterior.
50501, Movimientos breves
Si el comportamiento del robot y del sistema es correcto, la
sensibilidad de este mensaje de evento puede ajustarse
mediante el parámetro de sistema 'Max allowed short segments'
del tema Motion y el tipo Motion Planner.
50502, Error de carga de evitación de colisiones
Descripción
Una o más instrucciones de movimiento consecutivas han
provocado movimientos de longitud cercana a cero.
Tarea: arg.
Descripción
Se ha producido un error en los archivos de configuración para
la evitación de colisiones.
Consecuencias
Ref. de programa arg.
No se realizan comprobaciones de colisión.
Consecuencias
Programar un robot con múltiples movimientos de longitud
Causas probables
cercana a cero puede originar una carga elevada de la CPU y
Archivos de configuración incorrectos para la evitación de
hacer que las zonas se conviertan en puntos finos (mensaje
colisiones. Compruebe el registro de evento interno para una
de evento 50024).
descripción de errores más específica.
La programación de puntos muy cercanos entre sí también
Acciones recomendadas
puede provocar movimientos bruscos del robot.
Corrija los archivos de configuración.
396
Manual del operador - Solución de problemas de IRC5
3HAC020738-005 Revisión: AA
© Copyright 2005-2018 ABB. Reservados todos los derechos.
5 Solución de problemas con ayuda de los registros de eventos
5.8 7 xxxx
5.8 7 xxxx
71001, Dirección duplicada
Acciones recomendadas
Descripción
Corrija el tiempo de filtro activo de la señal de E/S.
La configuración de E/S no es válida.
Se ha indicado la misma dirección para el dispositivo de E/S
arg y el dispositivo de E/S arg.
71007, Valores lógicos fuera de rango
Descripción
Los dispositivos de E/S conectados a un mismo bus de E/S
deben tener direcciones exclusivas.
La configuración de E/S de la señal de E/S arg no es válida.
El valor lógico mínimo debe ser inferior al valor lógico máximo.
Este dispositivo de E/S ha sido rechazado.
Acciones recomendadas
Esta señal de E/S ha sido rechazada.
Acciones recomendadas
Asegúrese de que las direcciones sean correctas. Asegúrese
de que los dispositivos de E/S estén conectado a la red
Corrija los valores lógicos de la señal de E/S