UNIVERSIDAD DE VALLADOLID
E.T.S. INGENIEROS DE TELECOMUNICACIÓN
TEORÍA DE LA COMUNICACIÓN
CURSO 2010/2011
PROFESORES:
ROBERTO HORNERO SÁNCHEZ
MARÍA GARCÍA GADAÑÓN
TEORÍA DE LA COMUNICACIÓN
Curso 2010/2011
Profesores:
Roberto Hornero Sánchez (despacho 2D087)
e-mail: robhor@tel.uva.es
María García Gadañón (despacho 2D082)
e-mail: margar@tel.uva.es
DESCRIPCIÓN
En esta asignatura se estudia la base de los sistemas de comunicación analógicos y digitales.
En una primera parte se enseñan las diferentes modulaciones en amplitud y las
modulaciones angulares, y se profundizará en el efecto del ruido sobre estas modulaciones.
En una segunda parte se introducirán las modulaciones digitales y sus sistemas de
transmisión banda base y paso banda. Entre ambas partes hay un tema intermedio sobre la
modulación analógica y digital de pulsos.
Este contenido teórico se completa con la realización de problemas de cada tema y con tres
bloques de prácticas en el entorno MATLAB donde se simularán los distintos conceptos
explicados en teoría, y ver cuáles son sus implicaciones prácticas.
OBJETIVOS
Los objetivos de esta asignatura son:
¾ Conocer los distintos sistemas de comunicación existentes (analógicos y digitales) y
comprender las ventajas e inconvenientes de cada uno de ellos.
¾ Saber cuáles son los parámetros que se pueden modificar en cada caso, así cómo
evaluar sus prestaciones.
¾ Identificar cuándo se debe utilizar cada una de las diferentes soluciones existentes
para transmitir información a través de un medio entre dos puntos diferentes.
¾ Simular correctamente en el entorno MATLAB los distintos conceptos explicados
en teoría, y ver cuáles son sus implicaciones prácticas.
TEORÍA
TEMA 1: INTRODUCCIÓN A LOS SISTEMAS DE
COMUNICACIÓN.
1.1. INTRODUCCIÓN.
1.2. CARACTERIZACIÓN TEMPORAL
1.3. CARACTERIZACIÓN ESPECTRAL
1.4. CARACTERIZACIÓN DE SISTEMAS
1.5. DENSIDAD ESPECTRAL
1.6. ANCHO DE BANDA DE UNA SEÑAL
1.7. MODELADO PASO BAJO EQUIVALENTE
1.8. RETARDOS DE FASE Y GRUPO
1.9. TRANSMISIÓN DE UNA SEÑAL ALEATORIA A TRAVÉS
DE UN SISTEMA
1.10. ANÁLISIS DE RUIDO
TEMA 2: MODULACIONES DE AMPLITUD
2.1. INTRODUCCIÓN
2.2. MODULACIÓN AM
2.3. MODULACIÓN DSB-SC
2.4. MODULACIÓN QAM
2.5. FILTRADO DE BANDAS LATERALES
2.6. MODULACIÓN VSB
2.7. MODULACIÓN SSB
2.8. TRASLACIÓN EN FRECUENCIA
2.9. MULTIPLEXACIÓN POR DIVISIÓN EN FRECUENCIA
(FDM)
TEMA 3: MODULACIONES ANGULARES
3.1. MODULACIÓN DE FASE (PM) Y MODULACIÓN DE
FRECUENCIA (FM)
3.2. MODULACIÓN EN FRECUENCIA DE UN TONO SIMPLE
3.3. ANCHO DE BANDA DE SEÑALES FM
3.4. GENERACIÓN DE SEÑALES FM
3.5. DEMODULACIÓN DE FM
3.6. EFECTOS NO LINEALES EN SISTEMAS FM
TEMA 4: RUIDO EN MODULACIONES ANALÓGICAS
4.1. INTRODUCCIÓN: SNR y FOM
4.2. RUIDO EN MODULACIONES DE AMPLITUD
4.3. RUIDO EN MODULACIONES DE FRECUENCIA
4.4. RESUMEN
TEMA 5: MODULACIÓN ANALÓGICA Y DIGITAL DE PULSOS
5.1. INTRODUCCIÓN
5.2. TEOREMA DE MUESTREO
5.3. MODULACIÓN DE PULSOS EN AMPLITUD: PAM
5.4. MODULACIÓN DE PULSOS EN EL TIEMPO: PDM y PPM
5.5. MODULACIÓN DIGITAL DE PULSOS: PCM
5.5. CÓDIGOS DE LÍNEA
TEMA 6: TRANSMISIÓN DIGITAL EN BANDA BASE
6.1. INTRODUCCIÓN
6.2. INTERFERENCIA ENTRE SÍMBOLOS
6.3. CRITERIOS DE DECISIÓN
6.4. FILTRO ADAPTADO
6.5. DECISIÓN MEDIANTE UMBRAL. CÁLCULO DE LA
PROBABILIDAD DE ERROR
TEMA 7: TRANSMISIÓN DIGITAL PASO BANDA
7.1. TIPOS BÁSICOS DE MODULACIONES DIGITALES
7.2. REPRESENTACIÓN Y ANÁLISIS VECTORIAL
7.3. RECEPTORES COHERENTES E INCOHERENTES
7.4. ANÁLISIS DE LOS TIPOS DE MODULACIÓN
LABORATORIO
TUTORIAL DE MATLAB®
PRÁCTICA 1: INTRODUCCIÓN A LA SIMULACIÓN DE
SEÑALES Y SISTEMAS
• VISUALIZACIÓN EN TIEMPO Y FRECUENCIA DE SEÑALES
CONTINUAS
• MODELADO PASO BAJO EQUIVALENTE
• FILTRADO
• SEÑALES ALEATORIAS Y RUIDO
PRÁCTICA
2:
MODULACIÓN
EN
AMPLITUD.
MODULACIÓN
EN
FRECUENCIA.
RUIDO
EN
MODULACIONES ANALÓGICAS
• MODULACIÓN AM, SSB Y QAM.
• MODULACIÓN FM DE BANDA ESTRECHA
• RUIDO EN MODULACIÓN AM CONVENCIONAL
PRÁCTICA 3: MODULACIÓN ANALÓGICA DE PULSOS.
CUANTIFICACIÓN. TRANSMISIÓN DIGITAL BANDA
BASE Y PASO BANDA
• MODULACIÓN ANALÓGICA DE PULSOS
• CUANTIFICACIÓN UNIFORME Y NO UNIFORME
• INTERFERENCIA ENTRE SÍMBOLOS EN TRANSMISIÓN
DIGITAL BANDA BASE
• MODULACIÓN DIGITAL PASO BANDA
BIBLIOGRAFÍA
A) BIBLIOGRAFÍA BÁSICA
[1]
[2]
[3]
[4]
[5]
“Communication Systems”. Simon Haykin. Ed. John Wiley & Sons, 4ª
edición, 2001.
“Communications Systems. Analysis and Design”. Harold P..E. Stern, Samy
A. Mahmoud. Ed. Pearson, Prentice Hall, 2004.
“Sistemas de Comunicaciones”. Marcos Faúndez Zanuy. Ed. Marcombo
Boixareu, 2001.
“Modern Digital and Analog Communication Systems”. B. P. Lathi, Ed.
Oxford University Press, 3ª edición, 1998.
“Digital Communications”. John G. Proakis. Ed. McGraw Hill, 5ª edición,
2007.
B) BIBLIOGRAFÍA AVANZADA
[6]
[7]
[8]
[9]
“Digital Communications: Fundamentals and Applications”. Bernard Sklar.
Ed. Prentice Hall, 2ª edición, 2001.
“Communication Systems Using MATLAB and Contemporary Simulink”.
John G. Proakis, Masoud Salehi, Gerhard Bauch. Ed. Thomson Engineering,
2004.
“Communication Systems”. A. Bruce Carson, Paul Crilly, Janet Rutledge. Ed.
McGraw Hill, 4ª edición, 2001.
“Digital Communication”. John R. Barry, Edward A. Lee, David G.
Messerschmitt. Ed. Kluwer Academic Pub, 3ª edición, 2003.
UNIVERSIDAD DE VALLADOLID
E.T.S. INGENIEROS DE TELECOMUNICACIÓN
TEORÍA DE LA COMUNICACIÓN
Tema 1: Introducción a los Sistemas de
Comunicación
Teoría de la Comunicación - Curso 2010-2011
TEMA I : Introducción a los
Sistemas de Comunicación
1.1.-Introducción
1.2.-Caracterización temporal
1.3.-Caracterización frecuencial
1.4.-Caracterización de sistemas
1.5.-Densidad espectral
1.6.-Ancho de banda de una señal
Teoría de la Comunicación - Curso 2010-2011
TEMA I : Introducción a los
Sistemas de Comunicación
1.7.-Modelado paso bajo equivalente
1.8.-Retardos de fase y grupo
1.9.-Transmisión de una señal aleatoria a través de un
sistema
1 10 A áli i de
1.10.-Análisis
d ruido
id
1
Tema I: Introducción a los Sistemas de Comunicación
1.1. Introducción
Proceso de comunicación
La comunicación lleva implícita la transmisión de la
información de un punto a otro mediante la sucesión de
los siguientes procesos:
Generación de la información
Descripción de la información mediante un conjunto de símbolos
Codificación de los símbolos de una manera que sea apta para la
transmisión
Transmisión de los símbolos codificados al destino deseado
Decodificación y reproducción de los símbolos originales
Recreación de la información. Puede haber una degradación en la
calidad debido a imperfecciones en el sistema de comunicación
Tema I: Introducción a los Sistemas de Comunicación
1.1. Introducción
Los elementos básicos del sistema de comunicación son:
Transmisor
Canal
Receptor
Fuente de
información
Tx
Rx
Usuario de la
información
i f
ió
Canal
2
Tema I: Introducción a los Sistemas de Comunicación
1.1. Introducción
Señales banda base y paso banda
E lla T
d bbase, lla bbanda
d dde ttransmisión
i ió del
d l canall se
En
Tx bbanda
ajusta a la banda de frecuencia ocupada por la señal
transmitida
Señal banda base: señal generada por fuente de información
En la Tx paso banda, la banda de transmisión del canal es
m cho mayor
mucho
ma or que
q e la mayor
ma or componente frecuencial
frec encial de la
señal
Señal paso banda: proceso de modulación (traslación en frecuencia)
Tema I: Introducción a los Sistemas de Comunicación
1.1. Introducción
Ejemplo de señal
banda base
f (Hz)
Ejemplo de señal
paso banda
f (Hz)
3
Tema I: Introducción a los Sistemas de Comunicación
1.1. Introducción
Proceso de comunicación: naturaleza probabilística
I
tid b en lla señal
ñ l recibida
ibid
Incertidumbre
Mayor fuente de incertidumbre: ruido
Señales recibidas descritas en términos de sus propiedades
estadísticas
TEORÍA DE LA PROBABILIDAD
Tema I: Introducción a los Sistemas de Comunicación
1.1. Introducción
Proceso de modulación
L modulación
d l ió sirve
i
d
j
La
para adecuar
ell mensaje
original a su transmisión por el canal (Transmisor)
Se varía algún parámetro de la portadora de acuerdo con
el mensaje a transmitir
En la demodulación restauramos el mensaje
original a partir de la versión degradada de la señal
recibida tras propagarse por el canal (Receptor)
Hay varios tipos de modulación: más o menos
sensibles a efectos de ruido, distorsión, etc
4
Tema I: Introducción a los Sistemas de Comunicación
1.1. Introducción
Clasificación modulación:
De onda continua (modulación analógica)
Modulación de amplitud
Modulación angular:
Modulación de frecuencia (FM)
Modulación de fase (PM)
Modulación de pulsos
Analógica
Modulación de amplitud de pulsos (PAM)
Modulación de duración de pulsos (PDM)
Modulación de posición de pulsos (PPM)
Digital
Modulación de pulsos codificados (PCM)
Tema I: Introducción a los Sistemas de Comunicación
1.1. Introducción
La multiplexación va a permitirnos combinar varios
mensajes para ser transmitidos simultáneamente por el
mismo canal
Multiplexación por división en frecuencia (FDM)
Multiplexación por división en el tiempo (TDM)
Multiplexación por división en longitud de onda (WDM)
5
Tema I: Introducción a los Sistemas de Comunicación
1.1. Introducción
Recursos de comunicación
Pi i l
t dos:
d
Principalmente
Potencia transmitida
Ancho de banda del canal (B)
Debemos usar ambos eficientemente
Además:
SNR : cuantificación del efecto del ruido
C (capacidad de información): máximo rango en que la
información puede ser transmitida sin error. El teorema de la
capacidad de información:
C = B ⋅ log 2(1 + SNR)
(bits/seg)
Tema I: Introducción a los Sistemas de Comunicación
1.2.Caracterización temporal
Definición de señal
U señal
ñ l es una función
f ió del
d l tiempo
ti
t
ú i
Una
t que toma
un único
valor en cada punto y que representa una información (voz,
imagen, tensión o corriente, conjunto de símbolos, etc.)
Clasificación:
Continua, discreta y digital
Señal continua o analógica: puede tomar cualquier valor en
cualquier instante de tiempo (continua en tiempo y amplitud)
Señal discreta: definida únicamente en instantes enteros o discretos
de tiempo, pero puede tomar cualquier valor en esos instantes
6
Tema I: Introducción a los Sistemas de Comunicación
1.2.Caracterización temporal
Señal discreta en amplitud: definida en todo instante de tiempo,
pero sólo puede tomar ciertos valores de amplitud prefijados
(continua en tiempo - discreta en amplitud)
Señal digital: señal discreta en tiempo y amplitud
3
4
2.8
3.5
2.6
3
ampllitud
ampllitud
2.4
2.5
2
1.5
2.2
2
1.8
1.6
1
1.4
0.5
1.2
0
0
1
2
tiempo
3
4
5
1
6
7
8
9
10
0
1
tiempo
2
Señal continua
3
4
5
6
7
8
9
10
Señal discreta
Tema I: Introducción a los Sistemas de Comunicación
1.2.Caracterización temporal
4
3
3.5
2.5
3
2
amplitud
amplitud
2.5
1.5
1
2
1.5
1
0.5
0.5
0
0
0
2
4
6
tiempo
8
10
12
14
16
Señal discreta
en amplitud
18
20
0
1
2
3
tiempo
4
5
6
7
8
9
10
Señal digital
7
Tema I: Introducción a los Sistemas de Comunicación
1.2.Caracterización temporal
Periódicas y no periódicas
Señal periódica: Э To g(t) = g(t+ To) ∀t
Señal no periódica: NO existe To
Deterministas y aleatorias
Deterministas: señal completamente definida en el tiempo. No hay
incertidumbre de su valor pasado, presente o futuro
Aleatorias: hay un grado de incertidumbre sobre valores de la señal
Señales definidas en potencia y energia
Sistema eléctrico: v(t), R , i(t)
¾ Potencia instantánea:
p(t ) =
v(t )
2
R
= R ⋅ i(t )
2
Tema I: Introducción a los Sistemas de Comunicación
1.2.Caracterización temporal
Si R=1 Ω : p(t)= |v(t)|2 = |i(t)|2 = |g(t)|2
Energía total:
T
E = lim
T → ∞
∫
∞
2
g ( t ) dt =
−T
∫
2
g ( t ) dt
−∞
Potencia promedio:
P = lim
T → ∞
1
2T
T
∫
2
g ( t ) dt
−T
Señal definida en energía: 0<E<∞
Señal definida en potencia 0<P<∞
8
Tema I: Introducción a los Sistemas de Comunicación
1.2.Caracterización temporal
Son mutuamente excluyentes:
y
Las señales de energía tienen potencia media cero
Las señales de potencia tienen energía infinita
En general:
Señales de potencia:
¾ Señales periódicas
¾ Señales
l aleatorias
l
i
Señales de energía:
¾ Señales deterministas
¾ Señales no-periódicas
Tema I: Introducción a los Sistemas de Comunicación
1.2.Caracterización temporal
Unidades logarítmicas
S comparaciones
i
t magnitudes
it d del
d l mismo
i
ti
Son
entre
tipo
Son relativas y adimensionales
Las respuestas de nuestros sentidos son proporcionales a
los logaritmos de la excitación
Facilitan cálculos
g
k ⋅ logg n 2
Representación
p
ggeneral:
g1
n: base del logaritmo; k: factor de proporcionalidad;
g: valores de magnitudes consideradas en puntos distintos o niveles
9
Tema I: Introducción a los Sistemas de Comunicación
1.2.Caracterización temporal
Decibelio (dB):
A = 10 log
P2
dB
P1
A > 0: ganancia en potencia
A < 0: atenuación en potencia
V2
= I 2 ⋅ R;
R
P
V
I
A = 10 log 2 = 20 log 2 = 20 log 2
P1
V1
I1
P =
Si se comparan potencias en dos cargas distintas R1 , R2:
P
A = 10 log 2 = 10 log
P1
V 22
R2
V12
R1
= 20 log
V2
R
+ 10 log 1
V1
R2
Tema I: Introducción a los Sistemas de Comunicación
1.2.Caracterización temporal
Decibelio (dB):
3 dB
-3 dB
10 dB
20 dB
g=2
g=1/2
g=10
g=100
Sistema en cascada de ganancias g1 y g2:
¾ g=g2·g1 <==> g (dB)=g2 (dB)+ g1 (dB)
10
Tema I: Introducción a los Sistemas de Comunicación
1.2.Caracterización temporal
Neper(N)
A = ln
V2
1
P
N = ln 2 N
2
V1
P1
Relación con dB:
log VV12
V2
ln
=
⇒ A ( dB ) = 20 log(
V1
log e
= 20 log e ⋅ ln(
V2
V1
) ≅ 8 . 7 ln(
V2
V1
V2
V1
)=
)
A ( dB ) = 8 . 7 A ( N ) ⇒ 1 N ≈ 8 . 7 dB
Tema I: Introducción a los Sistemas de Comunicación
1.2.Caracterización temporal
Niveles: valores logarítmicos que toma una magnitud en un
ppunto
L = k ⋅ log
g2
dBx
g1
g2: valores de una magnitud en un punto
g1: valor de referencia de dicha magnitud
L: nivel absoluto de g2 representado en dBx, donde x indica la
unidad utilizada
Las dos unidades de referencia más utilizadas en sistemas de
comunicación:
¾ dBm: P1 = 1mw: L(dBm) = 10logP(mw)
L(dBw) = 10logP(w)
¾ dBw: P1 = 1w:
L(dBm) = 10logP(mw) = 10log[103 P(w)] = L(dBw) + 30
11
Tema I: Introducción a los Sistemas de Comunicación
1.3.Caracterización frecuencial
Transformada de Fourier (T. F.)
S g(t)
(t) una señal
ñ l no periódica
iódi determinista,
d t
i i t su T.
T F.
F es:
Sea
∞
G( f ) = ∫ g (t ) exp(− j 2πft )dt
−∞
frecuencia angular w = 2π f
La T.
T F.
F inversa es:
∞
g (t ) = ∫ G( f ) exp( j 2πft )df
−∞
Tema I: Introducción a los Sistemas de Comunicación
1.3.Caracterización frecuencial
Para que exista T. F., es suficiente con que se cumplan las
condiciones de Dirichlet
Nº finito de discontinuidades
Valor único para cada t
Nº finito de máximos y mínimos
Absolutamente integrable
Representación par transformado de Fourier
g (t ) ⇔ G ( f )
F [g ( t ) ] = G ( f )
F
−1
[G ( f ) ] =
g (t )
12
Tema I: Introducción a los Sistemas de Comunicación
1.3.Caracterización frecuencial
general G(f) es una función compleja:
En general,
G ( f ) = G ( f ) exp[ jθ ( f )]
|G(f)|: amplitud del espectro continuo
θ ( f ): fase del espectro continuo
Si g(t)
(t) es una ffunción
ió real:
l
⎧⇒ G ( f ) = G (− f )
G ( f ) = G * (− f )⎨
⎩⇒ θ ( f ) = −θ (− f )
Par
Impar
Tema I: Introducción a los Sistemas de Comunicación
1.3.Caracterización frecuencial
Propiedades de la T. F.
Li lid d
Linealidad
ag1 (t ) + bg 2 (t ) ⇔ aG1 ( f ) + bG 2 ( f )
( a y b son constantes )
Escalado en el tiempo
g ( at ) ⇔
1
f
G( )
a
a
( a e s u n a co n stan te )
Dualidad
Si
g (t ) ⇔ G ( f )
entonces G ( t ) ⇔ g ( − f )
13
Tema I: Introducción a los Sistemas de Comunicación
1.3.Caracterización frecuencial
Desplazamiento temporal
g ( t − t o ) ⇔ G ( f ) exp(( − j 2π ft o )
Desplazamiento frecuencial
exp( j 2πf c t ) g (t ) ⇔ G ( f − f c )
Área bajo g(t):
∫
∞
−∞
g ( t ) dt = G ( 0 )
Área bajo G(f):
g (0) =
∫
∞
−∞
G ( f ) df
Tema I: Introducción a los Sistemas de Comunicación
1.3.Caracterización frecuencial
Derivación en el dominio del tiempo
d
g ( t ) ⇔ j 2 π fG ( f )
dt
Integración en el dominio del tiempo
∫
t
−∞
g (τ ) d τ ⇔
1
G (0)
G( f ) +
δ(f)
j 2π f
2
Funciones conjugadas
Si
g ( t ) ⇔ G ( f );
entonces g * ( t ) ⇔ G * ( − f )
14
Tema I: Introducción a los Sistemas de Comunicación
1.3.Caracterización frecuencial
Multiplicación en el tiempo ⇒ convolución en frecuencia
g 1 (t ) g 2 (t ) ⇔
∫
∞
−∞
G1 ( λ )G 2 ( f − λ ) d λ
Convolución en el tiempo ⇒ multiplicación en frecuencia
∫
∞
−∞
g 1 (τ ) g 2 ( t − τ ) d τ ⇔ G 1 ( f ) G 2 ( f )
Ejemplo (de una señal y su T.F.):
t
x(t ) = A
AΠ
Π ( ) ⇔ X ( f ) = Aτ sinc
i ( fτ )
τ
X(f)
A
-τ/2
Aτ
τ/2
t (s)
1/τ
f (Hz)
Tema I: Introducción a los Sistemas de Comunicación
1.3.Caracterización frecuencial
Función delta de Dirac
L función
f ió ddelta
lt dde Di
i
l unidad
id d se ddefine
fi
La
Dirac o impulso
como: δ ( t ) = 0 ,
t ≠ 0
∫
∞
-∞
δ ( t ) dt = 1
Propiedad de extracción:
∫
∞
∫
∞
−∞
−∞
g (t )δ (t ) dt
d = g ( 0)
g (t )δ (t − t o )dt = g (t o )
g (t )δ (t − t o ) = g (t o )δ (t − t o )
15
Tema I: Introducción a los Sistemas de Comunicación
1.3.Caracterización frecuencial
Propiedad de replicación:
δ (t ) ∗ g (t ) = g (t ) ⇒ δ (t ) es la
l función
f ió identidad
id tid d
en el oper ador convo lución
δ (t-t o ) ∗ g (t ) = g (t − t o )
F[δ (t)] = 1
Tema I: Introducción a los Sistemas de Comunicación
1.3.Caracterización frecuencial
Transformada de Fourier de señales periódicas
S gp(t) una señal
ñ l periódica
iódi de
d período
í d To; se define:
d fi
Sea
− To
T
⎧
≤t≤ o
⎪ g p ( t ),
g (t ) = ⎨
2
2
⎪⎩ 0 ,
resto
⇒ Señal de energía, existe T. F.
Se cumple:
g p (t ) =
∞
∑ g(t − mT )
m=−∞
o
16
Tema I: Introducción a los Sistemas de Comunicación
1.3.Caracterización frecuencial
Suma de Poisson (se cumple para toda función de energía):
∞
∞
∑
1
g ( t − mT o ) =
To
exp(
j 2πnt
n
)⇔δ(f − )
To
To
m = −∞
∑
G(
n = −∞
n
j 2 π nt
) exp(
)
T0
T0
como
∞
1
g p (t ) = ∑ g (t − mTo ) ⇔
To
m = −∞
∞
n
n = −∞
o
∑ G(T
)δ ( f −
n
)
To
Tema I: Introducción a los Sistemas de Comunicación
1.3.Caracterización frecuencial
Entonces, la T. F. de una señal periódica es un tren de
deltas a frecuencias 0,±fo, ± 2fo, . . . donde fo=1/
1/ To
Periodicidad (tiempo) ⇔ Discretización (frecuencia)
Ejemplo (tomaremos una señal sinusoidal):
t (s)
f (Hz)
17
Tema I: Introducción a los Sistemas de Comunicación
1.4.Caracterización de sistemas
Un sistema es un dispositivo físico que proporciona
una señal de salida a partir de una de entrada
x(t)
T[ ]
y(t)
y(t)=T[x(t)]
Tema I: Introducción a los Sistemas de Comunicación
1.4.Caracterización de sistemas
Propiedades de los sistemas:
Li lid d ay1(t) + by
b 2(t) = T[ax
T[ 1(t) + bx
b 2(t)]
Linealidad:
Invarianza temporal: y(t-to) = T[x(t-to)]
Estabilidad: Si |x(t)| < M ⇒ y(t) = T[x(t)] < N
Sistema sin memoria ⇒ la salida en un instante depende de
la entrada en ese instante:
» y(
y(to) = f [x(t
[ ( o)]
Causalidad: la salida depende del pasado y del presente de
la entrada:
» y(to) = f [x(τ)]; ∀τ ≤ to
18
Tema I: Introducción a los Sistemas de Comunicación
1.4.Caracterización de sistemas
Respuesta al impulso de un sistema
it
LTI h(t) es la
l respuesta
t all impulso
i
l
Si en un sistema
LTI,
(h(t) = T[δ(t)] ); entonces podemos calcular la salida
convolucionando la respuesta al impulso con la señal de
entrada, es decir:
y (t ) =
∫
∞
−∞
x (τ ) h ( t − τ ) d τ = x ( t ) ∗ h ( t )
Si el sistema es L.T.I. y causal ⇒ h(t) = 0, si t < 0
Si el sistema es L.T.I. y estable:
∫
∞
−∞
h (τ ) d τ < ∞
Tema I: Introducción a los Sistemas de Comunicación
1.4.Caracterización de sistemas
Respuesta en frecuencia
L función
f ió de
d transferencia
t
f
i o respuesta
t en frecuencia
f
i viene
i
La
dada por:
∞
H ( f ) = ∫ h(t ) exp(− j 2πft )dt
−∞
∞
h(t ) = ∫ H ( f ) exp( j 2πft )df
−∞
Si el sistema es LTI ⇒ y(t ) = x(t ) ∗ h(t ) ⇔ Y ( f ) = X ( f ) H ( f )
En general,
l la
l función
f i de
d transferencia
f
i de
d un sistema
i
LTI,
será una función compleja:
H ( f ) = H ( f ) exp [ j β ( f ) ]
H(f) : respuesta
β(f): respuesta
en amplitud
del sistema
en fase
19
Tema I: Introducción a los Sistemas de Comunicación
1.4.Caracterización de sistemas
Filtros
E un dispositivo
di
iti selectivo
l ti de
d frecuencias
f
i que se emplea
l
Es
para limitar el espectro de una señal a unas bandas
específicas de frecuencia
Su respuesta en frecuencia se caracteriza por:
Bandas de paso: frecuencias transmitidas con nula o pequeña
distorsión
Bandas eliminadas: frecuencias rechazadas por el sistema
Si el filtro es ideal, en las bandas de paso la respuesta es la
unidad y en las eliminadas cero
Tema I: Introducción a los Sistemas de Comunicación
1.4.Caracterización de sistemas
Los tipos de filtros ideales son:
P
bbajo
j ideal:
id l únicamente
ú i
t deja
d j pasar las
l bajas
b j frecuencias
f
i
Paso
Paso alto ideal: únicamente deja pasar las altas frecuencias
Paso banda ideal: solo deja pasar las frecuencias entre dos
intervalos dados
Banda eliminada ideal: deja pasar todas las frecuencias
excepto las comprendidas dentro de un intervalo dado
20
Tema I: Introducción a los Sistemas de Comunicación
1.4.Caracterización de sistemas
1.2
1.2
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
-1 0
-8
-6
-4
-2
0
2
4
6
8
0
-1 0
10
f (Hz)
-8
-6
-4
-2
0
2
4
6
8
6
8
Paso alto ideal
Paso bajo ideal
10
f (Hz)
1.2
1.2
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
-1 0
-8
-6
-4
-2
0
2
4
6
8
0
-1 0
10
f (Hz)
-8
-6
-4
-2
0
2
4
10
f (Hz)
Banda eliminada ideal
Paso banda ideal
Tema I: Introducción a los Sistemas de Comunicación
1.5.Densidad espectral
Señales definidas en energía
S g(t)
(t) una señal
ñ l de
d energía,
í y G(f) su T.
T F.
F :
Sea
Teorema de la energía de Rayleigh :
E=
∫
∞
−∞
2
g (t ) dt =
∫
∞
−∞
2
G ( f ) df
Densidad espectral de energía (D.E.E.) :
Ψ g ( f) = G ( f )
E=
∫
∞
-∞
2
Ψ g ( f )df
21
Tema I: Introducción a los Sistemas de Comunicación
1.5.Densidad espectral
Relación con la función de autocorrelación:
R g (τ ) =
∫
∞
−∞
g ( t + τ ) g * ( t ) dt
⎡ ∞ g ( t + τ ) g * ( t ) dt ⎤ exp( − j 2π f τ ) d τ =
⎥⎦
−∞ ⎢
⎣ ∫− ∞
( ⇒ hacemos t + τ = ψ ; d τ = d ψ )
F [ R g (τ )] =
=
∫
∞
−∞
g * (t ) ∫
∫
∞
∞
−∞
g (ψ ) exp(( − j 2πψ f ) exp(( j 2π tf ) d ψ dt =
2
= G ( f )G * ( f ) = G ( f ) ≡ D .E .E .
R g (τ ) ⇔ Ψ g ( f )
Tema I: Introducción a los Sistemas de Comunicación
1.5.Densidad espectral
Señales periódicas
S gp(t) una señal
ñ l periódica
iódi de
d período
í d To
Sea
La potencia media es:
P = g (t )
2
1
=
To
= ( hacemos c n =
To
2
∫
T
− o
2
1
g p ( t ) dt = 2
To
2
1
n
G ( )) =
To
To
∞
∑
n = −∞
∞
∑
n = −∞
cn
n
G( )
To
2
=
2
⇒ Tª de potencia de Parseval
22
Tema I: Introducción a los Sistemas de Comunicación
1.5.Densidad espectral
Densidad espectral de potencia: función de la frecuencia
cuya área es igual a la potencia media de la señal
∞
P = ∫ S gp ( f )df
−∞
1
S gp ( f ) = 2
To
2
∞
∞
n
n
n
2
G
f
cn δ ( f − )
(
)
(
)
δ
−
=
∑
∑
To
To
To
n = −∞
n = −∞
La D.E.P. es una función discreta de la frecuencia debido a
la periodicidad temporal
Relacionado con la función de autocorrelación:
Rgp (τ ) ⇔ S gp ( f )
Tema I: Introducción a los Sistemas de Comunicación
1.5.Densidad espectral
Relación entrada-salida en un LTI
D id d espectral:
t l
Densidad
x(t)
h(t)
y(t)
⇒Y( f ) = H(f)X(f)
Con módulos:
Y(f)
2
2
= X(f) H(f)
2
2
Señales de energía: Ψ y ( f ) = H ( f ) Ψ x ( f )
Señales de potencia: S y ( f ) = H ( f ) 2 S x ( f )
⇒La relación entre la densidad espectral a la salida y la entrada
sólo depende de la respuesta en amplitud del sistema
23
Tema I: Introducción a los Sistemas de Comunicación
1.6.Ancho de banda de una señal
Es la banda en la q
que se encuentra la mayor
y parte
p
de la potencia (energía) de la señal
Hay varias definiciones, y por ello varias formas
de cuantificar el ancho de banda de una señal:
Ancho de banda equivalente
Ancho de banda a 3dB
Ancho de banda del 90%
Ancho de banda del primer nulo
Tema I: Introducción a los Sistemas de Comunicación
1.6.Ancho de banda de una señal
Ancho de banda equivalente
S x(t)
(t) una señal
ñ l banda
b d base
b
d
(f) se define
d fi
Sea
con d.e.p.
Sx(f),
ancho de banda equivalente como el que tendría una señal
estrictamente limitada en banda cuya potencia fuese la de
x(t) pero con d.e.p. uniforme y de valor el máximo de Sx(f)
Px = 2S x ( f ) max
a ⋅ weq
weq =
Px
2S x ( f ) max
∫
=
∞
−∞
S x ( f )df
2S x ( f ) max
24
Tema I: Introducción a los Sistemas de Comunicación
1.6.Ancho de banda de una señal
Ejemplo: pulso rectangular (amplitud A, anchura total τ).
Ψx ( f )
A
A2τ2
-τ/2
τ/2
1/τ
t (s)
f (Hz)
t
x (t ) = AΠ ( ) ⇔ X ( f ) = Aτ sinc ( fτ )
τ
Ψx ( f ) = A τ 2sinc 2 ( fτ ) ⇒ max[ Ψx ( f )] = A 2τ 2
2
Ex
weq =
=
2 A 2τ 2
∫
∞
2
−∞
x (t ) dt
2 A 2τ 2
=
A 2τ
1
=
2 2
2A τ
2τ
Tema I: Introducción a los Sistemas de Comunicación
1.6.Ancho de banda de una señal
Ancho de banda a 3dB
A ll frecuencia
f
i para la
l que la
l d.e.p.
d
di i
l
Aquella
disminuye
a la
mitad de su valor máximo
S x ( fc ) =
S x ( f ) max
⇒ w 3 dB = f c
2
Para el ejemplo anterior:
S x ( f ) = A2τ 2 sinc2 ( fτ ) ⇒ sinc2 ( f cτ ) =
fc =
0.443
τ
⇒ w3dB =
0.443
τ
=
1
2
1
2.26τ
25
Tema I: Introducción a los Sistemas de Comunicación
1.6.Ancho de banda de una señal
Ancho de banda del 90%
C ti
d la
l potencia/energía
t i /
í de
d la
l señal
ñ l
Contiene
ell 90% de
Ejemplo : 2 ∫
w0.9
0
A 2τ 2 sin c 2 ( fτ ) df = 0.9 A 2τ
Resolviend o numéricamente :
1.25
w0 .9 ≈
τ
Ancho de banda del primer nulo
w
=
1
τ
Tema I: Introducción a los Sistemas de Comunicación
1.6.Ancho de banda de una señal
f (H
(Hz))
Señales paso banda: los anchos son el doble que los
obtenidos para la misma señal paso bajo.
26
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
Queremos disponer de una herramienta que permita
analizar las señales independientemente de la frecuencia
central en la que trabajemos
Transformada de Hilbert
1
∧
g (t ) =
π
∫
∞
−∞
1
g (τ )
d τ = g (t ) ∗
t −τ
πt
Transformada de Hilbert inversa:
g(t ) = −
1
π
∧
∫
∞
−∞
∧
g (τ )
1
d τ = − g (τ ) ∗
πt
t −τ
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
Como:
∧
1
⇔ − jjsign
g ( f ) ⇒ G ( f ) = − jjsign
g ( f )G ( f )
πt
Introduce desfase de -90º para frecuencias positivas y 90º para
frecuencias negativas
La amplitud no se modifica
Nos servirá para ciertos tipos de modulaciones y para representar
señales
ñ l paso banda
b d
27
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
La respuesta en fase de la T. H. es :
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
Ejemplo de T. H. :
g ( t ) = cos( 2π f c t ) =
exp( j 2π f c t ) + exp( − j 2π f c t )
2
1
[δ ( f − f c ) + δ ( f + f c )]
2
∧
− j
G ( f ) = − jsign ( f ) G ( f ) =
sign ( f )[ δ ( f − f c ) + δ ( f + f c )] =
2
− j
1
=
[δ ( f − f c ) − δ ( f + f c )] =
[δ ( f − f c ) − δ ( f + f c )]
2
2j
∧
exp( j 2π f c t ) − exp( − j 2π f c t )
π
g (t ) =
= sin ( 2π f c t ) ⇒ desfase de
2j
2
G( f ) =
28
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
π
π
π
π
g (t − ) = cos(2πf ct − ) = cos(2πf ct ) cos( ) + sin(2πf ct )sin( ) =
2
2
2
2
= sin(2πf ct )
La transformada inversa de Hilbert retrasa otros π/2
radianes y cambia signo. Ejemplo:
H
−1
∧
[ g ( t )] = − sin ( 2 π f c t −
= cos( 2 π f c t )
π
2
) = − [ − cos( 2 π f c t )] =
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
Propiedades de la transformada de Hilbert:
Las señales g(t) y ĝ(t) tienen la misma densidad
espectral:
La señal g(t) está limitada en banda ⇒ ĝ(t) también
Tanto g(t) como ĝ(t) tienen la misma energía o potencia
Las señales g(t) y ĝ(t) tienen la misma función de
autocorrelación
Si g(t) ∈ ℜ ⇒ g(t) ┴ ĝ(t)
R
∧
gg
(τ = 0 ) = 0
H[ H(g(t)) ] = -g(t)
29
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
Señal analítica
D d g(t)
(t) ∈ ℜ , la
l señal
ñ l analítica
líti positiva,
iti se define:
d fi
Dado
∧
g + (t ) = g (t ) + j g (t ) ⇒ g (t ) = ℜe[ g + (t )]
⎧2G ( f ) si f > 0
⎪
G+ ( f ) = G ( f ) + j[− jsign( f )]G ( f ) = ⎨G (0) si f = 0
⎪0
si f < 0
⎩
∞
⇒ g + (t ) = 2∫ G ( f ) exp( j 2πft )df
0
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
Señal analítica negativa:
∧
g − (t ) = g (t ) − j g (t )
⎧2G ( f ) si f < 0
⎪
G− ( f ) = G ( f ) − j[− jsign( f )]G ( f ) = ⎨G (0) si f = 0
⎪0
si f > 0
⎩
0
⇒ g − (t ) = 2∫ G ( f ) exp(
p( j 2πft
f )dff
−∞
Señal original:
g (t ) =
1
[ g + ( t ) + g − ( t )]
2
30
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
G(f)
f (Hz)
G+(f)
G-(f)
f (Hz)
f (Hz)
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
Señales paso banda
S g(t)
(t) una señal
ñ l paso banda,
b d con ancho
h de
d banda
b d 2w
2
Sea
centrada en ± fc . En la mayoría de los sistemas de
comunicación fc >> 2w, por lo que se denominan también
señales banda estrecha
Se define la envolvente compleja como:
~
g ( t ) = g + ( t ) exp( − j 2π f c t )
Señal analítica positiva:
~
g + ( t ) = g ( t ) exp( j 2π f c t )
31
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
La señal g+(t) está limitada en banda (fc - w) ≤ f ≤ (fc + w)
~
G ( f ) = G+ ( f ) ∗ δ ( f + f c ) = G+ ( f + f c )
~
⇒ G (f) está limitada en -w ≤ f ≤ w
⇒ la envolvente compleja es una señal paso bajo
En general:
~
g (tt)) ∈ C
~
g (t ) = g c (t ) + jg s (t )
g c (t ) ,g s (t ) ∈ ℜ, son señales paso bajo
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
Por definición, una señal g(t):
~
g (t ) = ℜe[ g + (t )] = ℜe[ g (t ) exp( j 2πf c t )] =
= g c (t ) cos( 2πf c t ) − g s (t ) sin( 2πf c t )
⇒ Representa ción en forma canónica de la señal
g c (t ) ≡ componente en fase
g s (t ) ≡ componente en cuadra tura
~
j s (t )
R
Recopilando,
il d la
l envolvente
l t compleja:
l j g (t ) = g c (t ) + jg
Es una señal paso bajo
Contiene toda la información relevante de g(t) salvo la
frecuencia central a la que se encuentra
Por tanto, es una señal paso bajo equivalente a g(t)
32
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
Interpretación geométrica: fasor variante en el tiempo
~
g ( t ) = g c ( t ) + jg s ( t )
~
g ( t ) = a ( t ) exp
a (t ) =
[ jφ (t ) ]
g c2 ( t ) + g s2 ( t )
φ ( t ) = tag
-1
⎡ g s (t ) ⎤
⎢
⎥
⎣ g c (t ) ⎦
envolvente
natural
gs
a(t)
φ(t)
Eje real
gc
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
Además :
~
g + ( t ) = g ( t ) exp( j 2π f c t )
* El plano g c g s rota a una velocidad 2 πf c rad/s
* g ( t ) = ℜ e[ g + ( t )]
* La envolvente compleja trata de no prestar
atención al movimiento del plano g c g s
gs(t)
g+(t)
a(t)
φ(t)
g(t)
gc(t)
2πfct
Eje real
33
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
Obtención de las componentes:
g (t ) = g c (t ) cos( 2πf c t ) − g s (t ) sin( 2πf c t )
1 + cos( 4πf c t )
sin( 4πf c t )
− g s (t )
2
2
1 − cos( 4πf c t )
sin( 4πf c t )
− g s (t )
g (t ) sin( 2πf c t ) = g c (t )
2
2
⇒ Si filtramos paso bajo, obtenemos g c (t ) y g s (t )
g (t ) cos( 2πf c t ) = g c (t )
salvo un factor de escala
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
El esquema es:
⊗
g(t)
LPF
cos(2 π fct)
(1/2) c(t)
()
(1/2)g
osc.
-π/2
⊗
Y además:
LPF
gc(t)
osc.
⊗
cos(2 π fct)
-π/2
gs(t)
-(1/2)gs(t)
+
Σ
-
g(t)
⊗
34
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
Sistemas paso banda
L visto
i t hasta
h t ahora
h
i l
t incompleto
i
l t sii no
Lo
es operacionalmente
contamos con una herramienta que nos permita manejar
envolventes complejas para simular el efecto canal
Siendo cierto:
h(t)
x(t)
y(t)
Todas paso banda
???
Todas paso bajo
Nos gustaría operar:
~
~
x (t )
h (t )
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
Se demuestra:
~
∞ ~
~
~
~
2 y (t ) = ∫ h(τ ) x(t − τ )dτ = h(t ) ∗ x(t )
−∞
~
y (t ) = ℜe[ y (t ) exp( j 2πf ct )]
⇒ Podemos trabajar con señales exclusivamente paso bajo
Pero nos puede obligar a realizar 4 convoluciones:
~
~
~
2 y (t ) = h (t ) ∗ x (t ) = [ hc (t ) + jh s (t )] ∗ [ x c (t ) + jx s (t )] =
= [ hc (t ) ∗ x c (t ) − hs (t ) ∗ x s (t )] + j[ hc (t ) ∗ x s (t ) + hs (t ) ∗ x c (t )]
2 y c (t ) = hc (t ) ∗ x c (t ) − hs (t ) ∗ x s (t )
2 y s (t ) = hs (t ) ∗ x c (t ) + hc (t ) ∗ x s (t )
35
Tema I: Introducción a los Sistemas de Comunicación
1.7.Modelado paso bajo equivalente
En definitiva, para la evaluación de un sistema paso-banda
se realizan los siguientes pasos:
~
1. x(t ) se reemplaza por x(t );
~
x(t ) = ℜe[ x(t ) exp( j 2πf c t )]
~
2. h(t ) se reemplaza por h(t )
~
~
~
3. Se obtiene 2 y (t ) = h(t )∗ x(t )
~
4. Se calcula y (t ) = ℜe[ y (t )exp( j 2πf c t )]
Tema I: Introducción a los Sistemas de Comunicación
1.8.Retardos de fase y grupo
Retardo de fase del canal: retardo de una señal sinusoidal
(portadora)
Retardo de grupo: retardo de la señal de información
Un canal dispersivo en fase se puede modelar como:
H ( f ) = k exp[ jβ ( f )]
k : constante
β ( f ):función no lineal de la frecuencia
Sea una señal banda estrecha:
x ( t ) = x c ( t ) cos( 2 πf c t )
x c ( t ) señal paso bajo / X c ( f ) = 0
f >ω
2 w << f c
36
Tema I: Introducción a los Sistemas de Comunicación
1.8.Retardos de fase y grupo
Realizamos una expansión en serie de Taylor en torno a fc
con los 2 primeros
términos))
((aproximamos
p
p
β ( f ) ≈ β ( fc ) + ( f − fc )
Se define:
Retardo de fase:
τ
p
= −
Retado de grupo:
τg = −
dβ ( f )
df f = fc
β ( fc )
2π f c
1 dβ ( f )
2π df
f = fc
Tema I: Introducción a los Sistemas de Comunicación
1.8.Retardos de fase y grupo
Por tanto:
β ( f ) ≈ − 2 π f cτ
p
− 2 π ( f − f c )τ g
H ( f ) = k exp[ − j 2 π f cτ
p
− j 2 π ( f − f c )τ g ]
Envolventes complejas:
~
H ( f ) = H + ( f + f c ) = 2H ( f + f c )
f >0
~
H ( f ) = 2k exp(− j 2πf cτ p − j 2πfτ g )
~
X ( f ) = Xc( f )
~
~
1 ~
Y ( f ) = [ H ( f ) X ( f )] = k exp(− j 2πf cτ p ) exp(− j 2πfτ g ) X c ( f )
2
37
Tema I: Introducción a los Sistemas de Comunicación
1.8.Retardos de fase y grupo
Como xc (t − τ g ) ⇔ exp(− j 2πfτ g ) X c ( f )
~
y (t ) = kx
k c (t − τ g ) exp((− j 2πf cτ p )
y (t ) = kxc (t − τ g ) cos[2πf c (t − τ p )]
⎡~
⎤
Recordemos : y(t ) = ℜe ⎢ y (t ) exp( j 2πf ct )⎥
⎣
⎦
Por ello, la transmisión de x(t) por un canal dispersivo tiene
2 efectos:
L señal
La
ñ l portadora
d
se retarda
d τp (retardo
(
d de
d fase
f
o
portadora)
La envolvente xc(t) se retarda τg (retardo de grupo) ⇒
retardo de la señal de información
Tema I: Introducción a los Sistemas de Comunicación
1.8.Retardos de fase y grupo
Si β(f) = -22πfto (fase lineal)
τ
p
= −
β ( fc )
= to
2π f c
τ
g
= −
1 dβ ( f )
df
2π
⇒ Retardo
= to
f = fc
de fase y de grupo
iguales
38
Tema I: Introducción a los Sistemas de Comunicación
1.9.Transmisión de una señal
aleatoria a través de un sistema
Sea un sistema LTI cuya entrada es un proceso estocástico
X(t); queremos conocer las características del proceso de
salida Y(t) (media, autocorrelación, d.e.p., . . .)
h(t)
X(t)
Media
di
Y(t)
∞
mY (t ) = E[Y (t )] = E ⎡ ∫ h(τ ) X (t − τ )dτ ⎤
⎥⎦
⎢⎣ −∞
∞
Nota : E[ g ( x)] = ∫ g ( x) f X ( x)dx
−∞
f X ( x) ≡ f .d . p. (función de densidad de probabilidad)
Tema I: Introducción a los Sistemas de Comunicación
1.9.Transmisión de una señal
aleatoria a través de un sistema
Si lla media
di de
d X(t)
X( ) es finita
fi i y ell sistema
i
es estable:
bl
∞
∞
−∞
−∞
mY (t) = ∫ h(τ )E[ X (t −τ )]dτ =∫ h(τ )mX (t −τ )dτ
mY (t) = h(t ) ∗ mX (t )
Si X(t) es estacionario en sentido amplio (WSS)
⇒ mX = cte
m Y (t ) = m X
∫
∞
−∞
h (τ ) d τ = H ( 0 )m X
39
Tema I: Introducción a los Sistemas de Comunicación
1.9.Transmisión de una señal
aleatoria a través de un sistema
Autocorrelación
R Y ( t , u ) = E [ Y ( t ) Y ( u )] =
= E[∫
∞
−∞
h (τ 1 ) X ( t − τ 1 ) d τ 1 ∫
∞
−∞
h (τ 2 ) X ( u − τ 2 ) d τ 2 ]
Si el sistema es estable, y el valor cuadrático medio de la
señal de entrada es finito ∀t:
R
Y
(t, u ) = R
X
(t, u ) ∗ h (t ) ∗ h (u )
(1)
Si X(t) es WSS ⇒ la autocorrelación depende de la
diferencia de tiempos τ = t-u
R
Y
(τ ) = R
X
(τ ) ∗ h (τ ) ∗ h ( − τ )
(2)
Tema I: Introducción a los Sistemas de Comunicación
1.9.Transmisión de una señal
aleatoria a través de un sistema
Correlación cruzada:
Suponemos sistema estable y valor cuadrático medio de
la señal de entrada finito
R XY ( t , u ) = R X ( t , u ) ∗ h ( u )
R YX ( t , u ) = R X ( t , u ) ∗ h ( t )
Por (1) ⇒ R Y ( t , u ) = R XY ( t , u ) ∗ h ( t )
R Y ( t , u ) = R YX ( t , u ) ∗ h ( u )
Si además X(t) es WSS, por (2):
R XY (τ ) = R X (τ ) ∗ h ( − τ ) ⇒ R Y (τ ) = R XY (τ ) ∗ h (τ )
R YX (τ ) = R X (τ ) ∗ h (τ ) ⇒ R Y (τ ) = R YX (τ ) ∗ h ( − τ )
Similares deducciones para valor cuadrático medio,
covarianzas y autocovarianzas.
40
Tema I: Introducción a los Sistemas de Comunicación
1.9.Transmisión de una señal
aleatoria a través de un sistema
D id d espectral
Densidad
t l de
d potencia
t i (d.e.p.)
(d
)
Ahora trabajamos en el dominio de la frecuencia
Suponemos sistema LTI estable y X(t) proceso WSS
La densidad espectral de potencia es:
S
X
( f ) =
∫
∞
−∞
R
X
( τ ) exp( − j 2 π f τ ) d τ
Propiedades:
1. Relaciones de Wiener - Khintchine :
∞
S X ( f ) = ∫ R X (τ ) exp( − j 2πfτ ) dτ
−∞
∞
R X (τ ) = ∫ S X (τ ) exp( j 2πfτ ) df
⇒ Par transf ormado
−∞
Tema I: Introducción a los Sistemas de Comunicación
1.9.Transmisión de una señal
aleatoria a través de un sistema
2. S X ( 0 ) =
∫
∞
−∞
R X (τ ) d τ
3. R X (0) = E [ X 2 ] =
∫
∞
−∞
S X ( f ) df
4. S X ( − f ) = S X ( f ) ⇒ Función par de la frecuencia .
5. S X ( f ) ≥ 0
∀f
Relación entrada-salida en un sistema LTI estable y con
X(t) proceso WSS
2
SY ( f ) = H ( f ) S X ( f )
E [Y 2 ] = RY ( 0 ) =
∫
∞
−∞
S Y ( f ) df = ∫
∞
−∞
2
H ( f ) S X ( f ) df
41
Tema I: Introducción a los Sistemas de Comunicación
1.9.Transmisión de una señal
aleatoria a través de un sistema
Procesos gaussianos
La función densidad de probabilidad es conocida a priori:
f X (x) =
1
2π σ
X
⎡ (x − m X )2 ⎤
exp ⎢ −
⎥
2 σ X2
⎣
⎦
Independencia ⇒ Incorrelación (siempre)
En gaussianos: Incorrelación ⇒ Independencia
Se conserva el carácter gaussiano al atravesar un sistema
lineal ⇒ sólo habrá que calcular medias y varianzas
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
El ruido es toda señal no deseada que aparece en los
sistemas de comunicación y sobre la que no tenemos
ningún control
Tipos de ruido
Ruido externo al sistema: ruido atmosférico, producido por el hombre,
galáctico, etc
Ruido interno al sistema: el más importante es debido a las
fluctuaciones aleatorias de las portadoras en los dispositivos utilizados.
Los más comunes son:
Ruido impulsivo o shot: ruido cuya intensidad aumenta
bruscamente durante un intervalo de tiempo muy pequeño.
Ruido térmico: ruido producido por el movimiento aleatorio de los
electrones en los elementos integrantes de los circuitos
42
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
El análisis del ruido en los sistemas de comunicación se
basa en una forma idealizada de ruido: ruido blanco
Su densidad espectral de potencia es constante y no
depende de la frecuencia
N
Sw ( f ) = o
2
-1
Autocorrelación (F de la d.e.p.): Rw (τ ) = No δ (τ )
2
Entonces dos señales cualesquiera de ruido
Entonces,
blanco están incorreladas (ya que la correlación
es cero ∀τ excepto τ = 0 )
Si además el ruido es gaussiano ⇒ 2 señales
cualesquiera son estadísticamente independientes
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
Ruido blanco
Densidad espectral
Autocorrelación
Modelo físicamente no realizable: buena aproximación cuando el
ancho de banda de ruido es notablemente superior al del sistema
43
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
Ancho de banda equivalente de ruido o rectangular
Aplicación del ancho de banda equivalente
En un sistema paso bajo, para calcular el ancho de banda
equivalente, reemplazamos dicho sistema paso-bajo por un
filtro ideal paso-bajo con ancho de banda el que se desea
calcular y con amplitud el valor de la función de
transferencia en el origen de modo que la potencia de ruido
a la salida sea la misma cuando a la entrada hay ruido
blanco
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
Si la densidad espectral de ruido a la entrada es Sw(f)=No/2
⇒ la potencia de ruido a la salida es:
∞
N ∞
2
2
PNo = o ∫ H ( f ) df = No ∫ H ( f ) df
−
∞
0
2
Si tenemos la misma fuente de ruido y un filtro ideal pasobajo con ancho de banda ‘B’ y amplitud en el origen la
misma que el sistema H(0) ⇒ la potencia de ruido a la
salida es:
2
PNo = N o B H (0)
La potencia de ruido de salida de un sistema paso-bajo
con ancho de banda de ruido o rectangular B, cuando la
entrada es ruido blanco, es proporcional a dicho ancho
de banda
44
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
Si igualamos ambas expresiones:
∫
B=
∞
0
2
H ( f ) df
H (0)
2
≡ ancho de banda equivalente de ruido
Si el sistema es paso banda:
B'
∫
=
∞
0
2
H ( f ) df
H ( fc )
2
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
De forma gráfica (para sistemas paso bajo):
|H(f)|2
|H(0)|2
0
f (Hz)
45
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
Para sistemas paso banda:
|H(f)|2
|H(fc)|2
-fc
0
fc
f (Hz)
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
Ruido de banda estrecha
En eel receptor
comunicaciones
ecep o de los
os sistemas
s s e s de co
u c c o es que uutilizan
portadora:
La señal y el ruido se filtran de forma selectiva
Se deja pasar sólo la banda de frecuencias que interesa, no
el ruido fuera de esa banda
Un filtro de este tipo es un filtro banda estrecha (fc >> B)
El ruido tras el filtrado es un ruido banda estrecha
Vamos a estudiar como cualquier ruido de banda estrecha se
puede modelar como la salida de cierto sistema al que se le
aplica a su entrada un ruido blanco
46
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
Sea n(t) el ruido a la salida de un filtro paso-banda de
banda estrecha como respuesta a un ruido blanco,
gaussiano, de media cero y d.e.p. unidad; ω(t)
h(t)
ω(t)
SN ( f ) = H ( f )
∧
T.H.[n(t)]: n(t ) =
1
π ⋅t
2
n(t)
(la d.e.p. de ω (t ) es la unidad)
* n(t )
Sea fc la frecuencia central de la banda de ruido
Señal analítica positiva de ruido:
∧
n+ (t ) = n(t ) + j n (t )
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
Envolvente compleja:
~
n(t ) = n+ (t ) exp(− j 2πf ct ) (ruido paso bajo equivalente)
~
n(t ) = nc (t ) + jns (t )
nc (t ) es la componente en fase
ns (t ) es la componente en cuadratura
Si se desarrollan n+(t) y exp(-j2π fct), deducir:
^
n c ( t ) = n ( t ) cos( 2 π f c t ) + n ( t ) sin ( 2 π f c t )
^
n s ( t ) = n ( t ) cos( 2 π f c t ) − n ( t ) sin ( 2 π f c t )
⇒ n ( t ) = n c ( t ) cos( 2 π f c t ) − n s ( t ) sin ( 2 π f c t )
(forma canónica
del ruido banda estrecha)
47
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
Propiedades de las componentes en fase y cuadratura:
1) Si n(t) tiene media cero
cero, nc(t) y ns(t) también
^
⎧E[nc (t )] = 0
Si E[n(t)] = 0 ⇒ E[n(t )] = 0 ⇒ ⎨
⎩E[ns (t)] = 0
2) Si n(t) es gaussiano ⇒ nc(t) y ns(t) son gaussianas cada una de ellas
y conjuntamente gaussianas
3) Si n(t) es WSS y E[n(t)]=0 ⇒ nc(t) y ns(t) son WSS y son
conjuntamente WSS
4) Las componentes nc(t) y ns(t) tienen la misma d.e.p. :
⎧S ( f − f c ) + S N ( f + f c )
S Nc ( f ) = S Ns ( f ) = ⎨ N
⎩0
donde S N ( f ) definido f c − B ≤ f ≤ f c + B
−B≤ f ≤ B
re sto
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
5) Si n(t) tiene media cero ⇒ nc(t) y ns(t) tienen la misma varianza
que n(t)
6) La densidad espectral cruzada de las componentes en fase y
cuadratura son imaginarias puras y vienen dadas por:
⎧ j[ S ( f + f c ) − S N ( f − f c )]
S Nc N s ( f ) = −S N s Nc ( f ) = ⎨ N
⎩= 0
−B≤ f ≤ B
resto
∞
NOTA : S xy ( f ) = ∫ Rxy (τ ) exp(− j 2πfτ )dτ
−∞
7) Si un ruido paso banda n(t) es gaussiano, de media cero y su d.e.p.
SN(f) es localmente simétrica alrededor de ±fc⇒ nc(t) y ns(t) son
estadísticamente independientes; por lo que su f.d.p. es :
48
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
f Nc (tk ) Ns (tk ) (nc , ns ) = f Nc (tk ) (nc ) f Ns (tk ) (ns ) =
=
n2
n2
nc2 + ns2
1
1
1
−
exp(− c 2 )
exp(− s 2 ) =
exp(
)
2σ
2σ
2πσ 2
2σ 2
2π σ
2π σ
Resumen de propiedades: si n(t) es un ruido blanco banda
estrecha, de media nula, WSS y gaussiano:
nc((t)) y ns((t)) tienen media nula
Son WSS y conjuntamente estacionarios
Son gaussianos y conjuntamente gaussianos
Si la d.e.p. SN(f) es localmente simétrica respecto a ±fc⇒ nc(t) y
ns(t) son estadísticamente independientes
1.10. Análisis de ruido
– Representación de un ruido banda estrecha en función
de su envolvente y fase
• Podemos poner: n(t) = r(t)cos[2πfct + ψ (t)]; donde:
r (t ) =
nc2 (t ) + n s2 (t )
⎡ n s (t ) ⎤
⎥
⎣ n c (t ) ⎦
ψ (t ) = tag −1 ⎢
por otro lado :
nc (t ) = r (t ) cos[ψ (t )]
n s (t ) = r (t ) sin[ψ (t )]
n(t)
ns
r
ψ
nc
49
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
Si n(t) es gaussiano y de media cero, y SN(f) es
localmente simétrica alrededor de ±fc ⇒ nc(t) y ns(t) son
gaussianas y de media cero:
2
2
f N c , N s (nc , ns ) =
1
2πσ
2
exp(−
nc + ns
)
2σ 2
- cambio de variable : nc = r cos ψ ⇒ r = nc2 + ns2
⎡n ⎤
ns = r sin ψ ⇒ ψ = tag −1 ⎢ s ⎥
⎣ nc ⎦
dnc dns = rdrdψ
⇒ f R ,ψ (r ,ψ ) =
r
2πσ 2
exp(−
r2
) = f R (r ) fψ (ψ )
2σ 2
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
Esto sugiere:
⎧1
⎪
fψ (ψ ) = ⎨ 2π
⎪⎩0
0 ≤ ψ ≤ 2π
⇒ uniforme
r esto
⎧ r
r2
)
⎪ 2 exp( −
f R ( r ) = ⎨σ
2σ 2
⎪0
⎩
r≥0
⇒ distribuci ón de Rayl eigh
resto
Normalizamos: ν = r /σ
⎧
ν2
⎪ν exp( − )
fV (ν ) = σ f R(r) = ⎨
2
⎪0
⎩
ν>0
rest o
50
Tema I: Introducción a los Sistemas de Comunicación
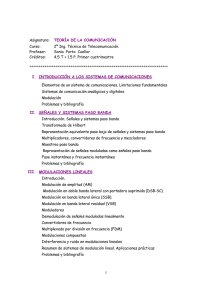
1.10. Análisis de ruido
La f.d.p. de una variable Rayleigh dada por la ecuación
anterior es la que se muestra a continuación (el máximo se
produce para ν = 1 , donde la función vale fV (ν ) = 0.607)
fV(ν)
ν
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
Envolvente de una señal sinusoidal con ruido de banda
estrecha
x(t ) = A cos(2πf ct ) + n(t ) = nc' (t ) cos(2πf ct ) − ns (t ) sin(2πf ct )
donde nc' (t ) = nc (t ) + A
Si n(t) es gaussiano, de media cero, varianza σ 2, y se cumple que
SN(f) es simétrica respecto a ± fc:
Las señales nc´(t)
(t) y ns(t) son gaussianas e independientes
Las medias son E[nc´(t)] = A; E[ns(t)] = 0
Las varianzas son Var[nc´(t)] = Var[ns(t)] = σ2
51
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
Por ello:
f N ' , N (nc' , ns ) =
c
s
⎡ (nc' − A) 2 + ns2 ⎤
exp
⎢−
⎥
2σ 2
2πσ 2
⎣
⎦
1
2
- cambio de variable : r (t ) = nc' (t ) + ns2 (t ) ; nc' (t ) = r (t ) cos[ψ (t )]
⎡ n (t ) ⎤
ψ (t ) = tag −1 ⎢ s' ⎥; ns (t ) = r (t ) sin[ψ (t )]
⎣ nc (t ) ⎦
⎡ r 2 + A2 − 2 Ar cosψ ⎤
exp⎢−
⇒ f R ,ψ (r ,ψ ) =
⎥
2πσ 2
2σ 2
⎦
⎣
donde R y ψ no son independientes (salvo para A = 0)
debido al término rcosψ .
r
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
La f.d.p. de R vendrá dada por:
f R (r ) =
∫
2π
0
f R , Ψ ( r ,ψ ) d ψ =
⎛ r 2 + A 2 ⎞ ⎡ 2π
Ar
⎤
⎜⎜ −
⎟⎟ ⎢ ∫ exp( 2 cos ψ ) d ψ ⎥
exp
2
2
0
σ
2 πσ
2σ
⎦
⎝
⎠⎣
donde el término entre corchetes es la función de
Bessel modificada de 1ª clase y orden cero.
=
r
Si hacemos x = Ar /σ 2:
⇒ I o ( x) =
f R (r ) =
r
σ2
1
2π
∫
2π
0
exp(−
exp( x cosψ ) dψ
r 2 + A2
Ar
) I 0 ( 2 ) ≡ distribución de Rician.
2
2σ
σ
52
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
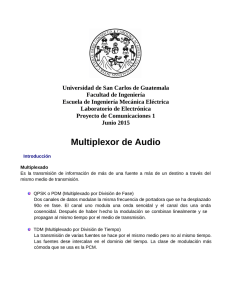
Normalizamos ν = r / σ ; a = A / σ :
fV (ν ) = σf R ( r )
fV (ν ) = ν exp( −
ν 2 + a2
2
) I o ( aν )
La f.d.p. de una variable aleatoria Rician es :
fV(ν)
a=0
a=1
a=22 a=3 a=4 a=5
ν
Tema I: Introducción a los Sistemas de Comunicación
1.10. Análisis de ruido
⇒ Para a = 0,
0 tenemos una distribuci ón Rayleigh
⇒ Para un entorno de ν = a y para valores grandes
de a , la distribuci ón se aproxima a una variable
aleatoria gaussiana (el que a sea grande implica que
A es grande respecto a σ , es decir, la portadora es
grande frente al ruido)
NOTAS:
NOTAS
Anexo con tablas de pares transformados, relaciones
trigonométricas y funciones tabuladas
Utilizar: http://www.gib.tel.uva.es/tc
53
ANEXO
TABLAS DE PARES TRANSFORMADOS,
RELACIONES TRIGONOMÉTRICAS Y
FUNCIONES TABULADAS
Resumen de las propiedades de la transformada de Fourier
Propiedad
1. Linealidad
2. Escalado temporal
3. Dualidad
4. Desplazamiento en tiempo
5. Desplazamiento en
frecuencia
6. Área bajo g(t)
7. Área bajo G(f)
8. Diferenciación en tiempo
9. Integración en tiempo
10. Funciones conjugadas
11. Multiplicación en tiempo
12. Convolución en tiempo
Descripción matemática
a ⋅ g 1 (t ) + b ⋅ g 2 (t ) ⇔ a ⋅ G1 ( f ) + b ⋅ G 2 ( f ) , siendo a y b
constantes
1
f
g (a ⋅ t ) ⇔ ⋅ G siendo a constate
a
a
Si:
g (t ) ⇔ G ( f ) ,
entonces: G (t ) ⇔ g (− f )
g (t − t 0 ) ⇔ G ( f ) ⋅ exp(− j 2πft 0 )
g (t ) ⋅ exp( j 2πf c t ) ⇔ G ( f − f c )
+∞
∫ g (t )dt = G(0)
g (0 ) = ∫ G ( f )df
−∞
+∞
−∞
dg (t )
⇔ j 2πf ⋅ G ( f )
dt
t
1
G (0 )
∫−∞ g (τ )dτ ⇔ j 2πf ⋅ G( f ) + 2 ⋅ δ ( f )
g (t ) ⇔ G ( f ) ,
Si:
entonces:
g * (t ) ⇔ G * (− f )
+∞
g 1 (t ) ⋅ g 2 (t ) ⇔ G1 ( f ) ∗ G 2 ( f ) = ∫ G1 (λ ) ⋅ G 2 ( f − λ )dλ
−∞
+∞
g 1 (t ) ∗ g 2 (t ) = ∫ g 1 (τ ) ⋅ g 2 (t − τ )dτ ⇔ G1 ( f ) ⋅ G 2 ( f )
−∞
1
Pares transformados de Fourier
Función en tiempo
t
Π
T
Transformada de Fourier
sin c(2Wt )
1
f
⋅ Π
2W
2W
1
a + j 2πf
2a
T ⋅ sin c( fT )
exp(− at ) ⋅ u (t ) , a > 0
exp(− a t ) , a > 0
(
a 2 + (2πf )
exp − πf 2
2
)
(
exp − πt 2
t
Λ
T
δ (t )
1
δ (t − t 0 )
exp( j 2πf c t )
)
T ⋅ sin c 2 ( fT )
1
δ(f )
exp(− j 2πft 0 )
δ ( f − fc )
1
⋅ [δ ( f − f c ) + δ ( f + f c )]
2
1
⋅ [δ ( f − f c ) − δ ( f + f c )]
2j
1
jπf
cos(2πf c t )
sin (2πf c t )
sign(t )
1
πt
− j ⋅ sign( f )
u (t )
1
1
⋅δ( f )+
2
j 2πf
1 +∞
n
⋅ ∑ δ f −
T0 n = −∞
T0
+∞
∑ δ (t − iT0 )
i = −∞
NOTAS:
u(t): Función escalón unidad
δ(t): Función delta de Dirac
T
t 1 , t < 2
Π =
T 0 , t ≥ T 2
t
t 1 −
, t <T
Λ = T
T 0
, t ≥T
1 ,t > 0
sign(t ) = 0 , t = 0
− 1 , t < 0
2
Pares transformados de Hilbert
Función en tiempo
m(t ) ⋅ cos(2πf c t )
(1)
m(t ) ⋅ sin (2πf c t )
cos(2πf c t )
sin (2πf c t )
sin (t )
t
Transformada de Hilbert
m(t ) ⋅ sin (2πf c t )
− m(t ) ⋅ cos(2πf c t )
sin (2πf c t )
− cos(2πf c t )
1 − cos(t )
t
1
t−
1
2
− ⋅ log
1
π
t+
2
1
πt
t
1+ t2
(1)
t
Π
T
δ (t )
1
1+ t2
1
t
− π ⋅ δ (t )
(1) En los dos primeros pares, se asume que m(t) es una señal limitada en banda, en el
intervalo: -W ≤ f ≤ W, siendo: fc > W.
NOTAS:
δ(t): Función delta de Dirac
T
t 1 , t < 2
Π =
T 0 , t ≥ T 2
log: logaritmo natural
Identidades trigonométricas
exp(± jθ ) = cos(θ ) ± j ⋅ sin (θ )
1
cos(θ ) = ⋅ [exp( jθ ) + exp(− jθ )]
2
1
sin (θ ) =
⋅ [exp( jθ ) − exp(− jθ )]
2j
2 ⋅ sin (θ ) ⋅ cos(θ ) = sin (2θ )
sin (a ± b ) = sin (a ) ⋅ cos(b ) ± cos(a ) ⋅ sin (b )
cos(a ± b ) = cos(a ) ⋅ cos(b ) m sin (a ) ⋅ sin (b )
tan (a ) ± tan (b )
tan (a ± b ) =
1 m tan (a ) ⋅ tan (b )
1
sin (a ) ⋅ sin (b ) = ⋅ [cos(a − b ) − cos(a + b )]
2
1
cos(a ) ⋅ cos(b ) = ⋅ [cos(a − b ) + cos(a + b )]
2
1
sin (a ) ⋅ cos(b ) = ⋅ [sin (a − b ) + sin (a + b )]
2
sin 2 (θ ) + cos 2 (θ ) = 1
cos 2 (θ ) − sin 2 (θ ) = cos(2θ )
1
cos 2 (θ ) = ⋅ [1 + cos(2θ )]
2
1
sin 2 (θ ) = ⋅ [1 − cos(2θ )]
2
3
Funciones de Bessel
Jn(x)
n\x
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
0.5
1
2
3
4
6
8
10
12
0.9385
0.2423
0.0306
0.0026
0.0002
0.7652
0.4401
0.1149
0.0196
0.0025
0.0002
0.2239
0.5767
0.3528
0.1289
0.0340
0.0070
0.0012
0.0002
-0.2601
0.3391
0.4861
0.3091
0.1320
0.0430
0.0114
0.0025
0.0005
0.0001
-0.3971
-0.0660
0.3641
0.4302
0.2811
0.1321
0.0491
0.0152
0.0040
0.0009
0.0002
0.1506
-0.2767
-0.2429
0.1148
0.3576
0.3621
0.2458
0.1296
0.0565
0.0212
0.0070
0.0020
0.0005
0.0001
0.1717
0.2346
-0.1130
-0.2911
-0.1054
0.1858
0.3376
0.3206
0.2235
0.1263
0.0608
0.0256
0.0096
0.0033
0.0010
-0.2459
0.0435
0.2546
0.0584
-0.2196
-0.2341
-0.0145
0.2167
0.3179
0.2919
0.2075
0.1231
0.0634
0.0290
0.0120
0.0477
-0.2234
-0.0849
0.1951
0.1825
-0.0735
-0.2437
-0.1703
0.0451
0.2304
0.3005
0.2704
0.1953
0.1201
0.0650
Función de error
u
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0.45
0.50
0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
1.05
erf(u)
0.00000
0.05637
0.11246
0.16800
0.22270
0.27633
0.32863
0.37938
0.42839
0.47548
0.52050
0.56332
0.60386
0.64203
0.67780
0.71116
0.74210
0.77067
0.79691
0.82089
0.84270
0.86244
u
1.10
1.15
1.20
1.25
1.30
1.35
1.40
1.45
1.50
1.55
1.60
1.65
1.70
1.75
1.80
1.85
1.90
1.95
2.00
2.50
3.00
3.30
4
erf(u)
0.88021
0.89612
0.91031
0.92290
0.93401
0.94376
0.95229
0.95970
0.96611
0.97162
0.97635
0.98038
0.98379
0.98667
0.98909
0.99111
0.99279
0.99418
0.99532
0.99959
0.99998
0.999998
TEORÍA DE LA COMUNICACIÓN
CUESTIONES TEMA 1
INTRODUCCIÓN A LOS SISTEMAS DE COMUNICACIÓN
1.- Indicar los principales canales de comunicación utilizados en la actualidad.
2.- Tipos de señales. Explicar cada uno de ellos.
3.- ¿Cómo se define la energía o la potencia media de una señal?
4.- ¿Cómo se definen y por qué se utilizan las unidades logarítmicas?
5.- Que tenga periodicidad una señal en el dominio del tiempo, ¿qué implicación tiene en el
dominio de la frecuencia?
6.- Ecuación síntesis y análisis de la transformada de Fourier. ¿Cuáles son las condiciones
para que una señal tenga trasformada de Fourier?
7.- ¿Cómo se puede calcular a simple vista al área bajo g(t) o bajo G(f)?
8.- Definición y propiedades de los sistemas.
9.- En el caso de sistemas LTI, ¿qué condición debe cumplir la respuesta al impulso para
que el sistema sea i) sin memoria, ii) causal, y iii) estable?
10.- ¿Cuál es la respuesta en amplitud y en fase? ¿Cómo se relacionan con la función de
transferencia? ¿Cuál es la ganancia del sistema y su relación con la respuesta en amplitud?
11.- ¿Qué es un filtro? Tipos de filtros ideales.
12.- ¿Cuál es la relación entre la densidad espectral de energía y la transformada de Fourier
para una señal de energía?
13.- Dar una expresión para la energía en el dominio del tiempo y en el de la frecuencia.
14.- ¿Cuál es la relación entre la densidad espectral de potencia y los coeficientes de la serie
compleja de Fourier para una señal periódica?
15.- ¿Cómo se puede calcular la densidad espectral a la salida de un sistema a partir de la
densidad espectral a la entrada tanto para señales de energía como de potencia?
16.- ¿Cómo se puede calcular la correlación de la señal de entrada y la señal de salida de un
sistema? ¿Cómo se puede calcular la autocorrelación de la señal de salida?
17.- Dar al menos tres criterios para calcular en la práctica el ancho de banda.
18.- ¿Cuál es la ecuación análisis y síntesis para la transformada de Hilbert? La
transformada de Hilbert de una señal se puede calcular haciendo pasar a ésta por un
sistema LTI. ¿Cuál es la respuesta al impulso de ese sistema que recibe el nombre de
transformador de Hilbert? ¿Cuál es la respuesta en amplitud de dicho sistema? ¿Cuál es la
relación entre la señal y su transformada de Hilbert en el dominio de la frecuencia?
19.- ¿Cómo se calcula la señal analítica positiva y la señal analítica negativa de una señal
cualquiera en el dominio del tiempo y de la frecuencia?
20.- Para una señal paso banda, ¿cómo se calcula la envolvente compleja en el dominio del
tiempo y de la frecuencia?
21.- ¿Cómo se definen las componentes en fase y en cuadratura de una señal paso banda?
¿Cuál es la forma canónica de una señal paso banda?
22.- ¿Cómo se puede calcular una señal a partir de sus componentes en fase y en cuadratura
y al revés?. Poner los diagramas de bloques.
23.- Hacer un diagrama fasorial de una señal paso banda, indicando la envolvente natural, la
fase, la componente en fase y la componente en cuadratura.
24.- Si se tiene la envolvente compleja de la señal a la entrada de un sistema LTI paso
banda y la envolvente compleja del sistema, ¿cómo se calcula la envolvente compleja de la
señal a la salida?
25.- ¿Cuál es la definición del retardo de fase y de grupo? ¿Cuál es el sentido físico de cada
uno y cómo se puede aplicar al caso de señales y sistemas paso banda?
26.- ¿Cuál es la expresión, en el caso estacionario, de la media y la autocorrelación a la
salida de un sistema LTI en función de la media y la autocorrelación a la entrada y la
respuesta al impulso del sistema?
27.- ¿Cuál es la relación entre la densidad espectral de potencia y la autocorrelación?.
¿Cómo se define la densidad espectral cruzada?
28.- ¿Cuál es la expresión de la densidad espectral de potencia a la salida de un sistema LTI
en función de la densidad espectral de potencia a la entrada y la función de transferencia del
sistema?
29.- ¿Cómo es la distribución de la salida de un sistema LTI cuya entrada es gaussiana?
30.- ¿Cuál es la densidad espectral de potencia y la autocorrelación para un ruido blanco
gaussiano y de media cero?
31.- ¿Cuál es la forma canónica de un ruido de banda estrecha?
32.- ¿Qué se puede decir de las componentes en fase y en cuadratura de un ruido de banda
estrecha con media cero, gaussiano y estacionario?
33.- ¿Cómo se puede calcular la densidad espectral de potencia de las componentes en fase
y en cuadratura de un ruido de banda estrecha a partir de la densidad espectral de potencia
de ese ruido?
34.- ¿Cuál es la distribución de la envolvente natural de un ruido de banda estrecha
gaussiano con media cero?
35.- ¿Cuál es la distribución de la envolvente natural de un ruido de banda estrecha
gaussiano con media cero junto con una señal sinusoidal?
TEORÍA DE LA COMUNICACIÓN
PROBLEMAS TEMA 1
INTRODUCCIÓN A LOS SISTEMAS DE COMUNICACIÓN
1.- Clasifica las siguientes señales como señales de energía o de potencia. Calcula en cada
caso la potencia o la energía de dichas señales:
a) x ( t ) = A cos( 2 π f 0 t ) para - ∞ < t < ∞
para - T0 / 2 ≤ t ≤ T0 / 2, donde T0 = 1/ f 0
⎧ A cos( 2 π f 0 t )
b) x ( t ) = ⎨
0
para el resto
⎩
para t > 0 y a > 0
⎧ A exp( −at )
c) x ( t ) = ⎨
0
para el resto
⎩
d) x ( t ) = cos( t ) + 5 cos( 2t ) para - ∞ < t < ∞
2.a) Calcular la transformada de Fourier del pulso medio-coseno mostrado en la figura:
g(t)
A
-T/2
0
T/2
t
b) Aplicar la propiedad de desplazamiento temporal para que a partir del resultado
obtenido en el apartado anterior calcular la transformada de Fourier del pulso medio-seno
mostrado en la figura:
g(t)
A
0
T
t
c) ¿Cuál es la transformada de Fourier del pulso medio-seno de duración aT?
d) ¿Cuál es la transformada de Fourier del pulso medio-seno negativo de la siguiente figura?
g(t)
-T
0
t
-A
e) Calcular el espectro del pulso seno de la siguiente figura:
g(t)
A
-T
0
T
t
-A
3.- Una señal x(t) de energía finita es aplicada a un dispositivo cuadrático cuya salida y(t)
está relacionada con la entrada x(t) mediante la expresión:
y(t) = x2(t)
El espectro de x(t) está limitado al intervalo de frecuencias -W ≤ f ≤ W. Mostrar entonces
que el espectro de y(t) está limitado al intervalo -2W ≤ f ≤ 2W.
4.- Considerar una función g(t) que sea un pulso formado por un número finito de
segmentos de línea recta. Supongamos que dicha función g(t) es diferenciable con respecto
al tiempo dos veces, de modo que puede generarse un tren de deltas ponderadas de la
siguiente forma:
d 2 g(t)
= ∑ k i δ( t - t i )
dt 2
i
donde los ki están relacionados con las pendientes de los segmentos de línea recta.
a) Dados los valores de ki y de ti, mostrar que la transformada de Fourier de g(t) viene dada
por:
G(f) = -
1
4 π 2f 2
∑k
i
exp( − j2 πf t i )
i
b) Utilizando este procedimiento, mostrar que la transformada de Fourier del pulso
trapezoidal mostrado en la figura:
g(t)
A
-tb
-ta
0
ta
tb
t
es:
G(f) =
A
sin[π f ( t b − t a )]sin[π f ( t b + t a )]
π f (tb − ta )
2 2
5.- Calcular la densidad espectral de potencia del pulso RF de la figura:
g(t)
1/fc
...
...
2A
t
T0/2
T0/2
6.- Mostrar que la densidad espectral de energía del pulso:
g(t)
A
-T/2
y la del pulso:
0
T/2
t
g(t)
A
0
T
t
es la misma y tiene un valor:
Ψ g ( f) =
4A 2T 2 cos 2 (π T f)
π 2 (1 − 4T 2 f 2 ) 2
7.- Considere un sistema receptor formado por cinco secciones como se muestra en la
siguiente figura:
1
2
Entrada
3
4
5
Salida
sabiendo que la primera sección, la tercera y la quinta son atenuadores iguales de 5 dB y que
introducen una potencia de ruido de -100 dBm, -50 dBm y -20 dBm respectivamente al
final de esa sección. Sabiendo además que las secciones segunda y cuarta son
amplificadores de 20 y 50 dB respectivamente que además introducen un ruido de -50 dBm
y -20 dBm respectivamente al final de esa sección. Con esos datos y suponiendo que a la
entrada hay una potencia de señal de -50 dBm y de ruido de -100 dBm, determinar:
a) El valor de la SNR a la entrada en dB.
b) La potencia de señal a la salida en dBm.
c) La potencia de ruido a la salida en dBm.
d) El valor de la SNR a la salida en dB.
e) La relación entre el valor de la SNR a la entrada y el valor de la SNR a la salida medida
en dB.
8.- Una señal periódica xp(t) de período T0 se aplica a un filtro lineal e invariante en el
tiempo de respuesta al impulso h(t). Utiliza la representación en serie de Fourier Compleja
de xp(t) y la integral de convolución para evaluar la respuesta del filtro a dicha entrada.
9. Respecto la señal x ( t ) = k 0 e − k1t u ( t ) , donde k0 , k1 > 0 , se pide:
a) Ancho de banda a 3 dB
b) Ancho de banda equivalente
c) Ancho de banda del 90%
d) Ancho de banda del primer nulo
10.a) Considerar una señal g(t) limitada a la banda de frecuencias -B ≤ f ≤ B. Esta señal se
aplica a un filtro paso bajo con amplitud no constante y fase lineal dado por:
f
⎧
⎪ a + a 1 cos( π ) para f ≤ B
H(f) = ⎨ 0
B
⎪⎩0
para f > B
y por:
⎧- 2 π t 0f para f ≤ B
β( f) = ⎨
para f > B
⎩0
Determinar la salida del filtro resultante.
b) Supóngase ahora el caso contrario para el que la amplitud es constante y la fase no lineal:
⎧a 0 para f ≤ B
H(f) = ⎨
⎩ 0 para f > B
y por:
f
⎧
⎪- 2 π t 0f + b1 sin( π ) para f ≤ B
β( f) = ⎨
B
para f > B
⎪⎩ 0
Determinar la salida del filtro resultante suponiendo que la constante b1 es lo
suficientemente pequeña como para poder utilizar la aproximación:
πf ⎤
πf
⎡
exp⎢ jb1 sin( )⎥ ≅ 1 + jb1 sin( )
B ⎦
B
⎣
11.- Determina la señal analítica positiva g+(t) la señal analítica negativa g-(t), la envolvente
compleja ~
g ( t) , la componente en fase gc(t), la componente en cuadratura gs(t), la
envolvente natural a(t) y la fase φ(t) para las siguientes señales:
a) g(t) = sinc(t).
b) g(t) = [1 + k cos(2πfmt)] cos(2πfct).
12.- Una señal de banda estrecha se puede expresar de la forma:
g(t) = gc(t)cos(2πfct)-gs(t)sin(2πfct)
Utilizando G+(f) para denotar la transformada de Fourier de la señal analítica positiva de
g(t), mostrar que las transformadas de Fourier de las componentes en fase gc(t) y en
cuadratura gs(t) vienen dadas por:
[
]
[
]
G c (f) =
1
G + (f + f c ) + G +* (-f + f c )
2
G s (f) =
1
G + (f + f c ) - G +* (-f + f c )
2j
Se ha estudiado un diagrama de bloque que ilustra el método para obtener la componente
en fase gc(t) y en cuadratura gs(t) a partir de la señal g(t). Ayudados por este diagrama de
bloques, y dado que el espectro de g(t) está limitado en la banda f c − W ≤ f ≤ f c + W ,
demostrar las siguientes expresiones de las transformadas de Fourier de las componentes
en fase gc(t) y en cuadratura gs(t):
⎧G(f - f c ) + G(f + f c )
G c (f) = ⎨
0
⎩
−W ≤f ≤ W
resto
⎧j[G(f - f c ) − G(f + f c )]
G s (f) = ⎨
0
⎩
−W ≤f ≤ W
resto
13.- Dada la siguiente señal paso banda:
g(t)
A
-T/2
T/2
-A
1/fc
t
y el sistema paso banda:
2
⎧1 1
⎡ π T(f - f c ) ⎤
≤
para
f
f
c
⎪ 2 + 2 cos⎢
⎥⎦
2
T
⎣
⎪
2
⎪1 1
⎡ π T(f + f c ) ⎤
para f + f c ≤
H(f) = ⎨ + cos⎢
⎥
2
T
⎣
⎦
⎪2 2
para el resto
⎪ 0
⎪⎩
a) Determinar la transformada de Fourier de la señal de entrada X(f).
b) Determinar la transformada de Fourier de la envolvente compleja de la señal de entrada
~(f) .
X
c) Determinar la transformada de Fourier de la envolvente compleja de la respuesta al
~ (f) .
impulso del sistema H
d) Determinar la transformada de Fourier de la envolvente compleja de la señal de salida
~
Y(f) .
e) Determinar la transformada de Fourier de la señal de salida Y(f).
e) Determinar la señal de salida y(t).
14.- Si de un sistema de fase no lineal se sabe que una buena aproximación de su respuesta
en fase β(f) se puede calcular desarrollando dicha respuesta en fase en serie de Taylor en
torno a una frecuencia fc = 1 MHz y quedándose con los dos primeros términos de dicho
desarrollo, puesto que se sabe que la no linealidad de la fase no es muy grande. Si la
expresión para dicha aproximación es β(f) ≈ 7 - 10-5f, calcular:
a) El valor del retardo de fase τp.
b) El valor del retardo de grupo τg.
15.- Si a la entrada de un sistema lineal e invariante en el tiempo dado por:
H(f) = K
y por:
β (f) = - 2π f c τ p − 2 π (f - f c )τ g
se aplica una señal de banda estrecha dada por:
x(t) = xc(t)cos(2πfct)-xs(t)sin(2πfct)
calcular la expresión de la señal de salida y(t) en función de K, xc(t), xs(t), fc, τp y τg.
16.- La densidad espectral de potencia de un proceso estocástico X(t) es la siguiente:
SX(f)
δ(f)
1
-f0
0
f0
f
Determina y dibuja la función de autocorrelación RX(τ).
17.- Un par de procesos ruidosos n1(t) y n2(t) están relacionados por:
n2(t) = n1(t) cos(2πfct + θ) - n1(t) sin(2πfct + θ)
donde fc es una constante y θ es una variable aleatoria definida por:
⎧⎪ 1
f Θ ( θ) = ⎨ 2π
⎪⎩ 0
para 0 ≤ θ ≤ 2 π
para el resto
El proceso de ruido n1(t) es estacionario en sentido amplio y su densidad espectral de
potencia es:
SN1(f)
a
-W
0
W
f
Encontrar y dibujar la densidad espectral de potencia de n2(t).
18.- Considerar un proceso de ruido blanco gaussiano de media cero y densidad espectral
de potencia N0/2 que se aplica a la entrada del sistema que se muestra en la siguiente figura:
Ruido
Blanco
Filtro paso
banda H1(f)
X
Filtro paso
bajo H2(f)
Señal de
Salida
cos (2πfct)
siendo el filtro paso banda:
H 1 ( f)
2B
1.0
0
-fc
fc
y el filtro paso bajo:
H 2 ( f)
1.0
0
f
2B
a) Encontrar la densidad espectral de potencia del proceso de salida del sistema.
b) ¿Cuál es la media y la varianza de este proceso de salida?
f
TEORÍA DE LA COMUNICACIÓN
SOLUCIONES DE LOS PROBLEMAS TEMA 1
INTRODUCCIÓN A LOS SISTEMAS DE COMUNICACIÓN
1.
a. Señal definida en potencia:
b. Señal definida en energía:
c. Señal definida en energía:
d. Señal definida en potencia:
A2
Px =
2
A 2 T0
Ex =
2
2
A
Ex =
2a
Px = 13
2.
⎡
1⎞
1 ⎞⎤
⎛
⎛
⋅ ⎢sin c⎜ fT − ⎟ + sin c⎜ fT + ⎟⎥
2⎠
2 ⎠⎦
⎝
⎝
⎣
A⋅T ⎡
1⎞
1 ⎞⎤
⎛
⎛
b. G a ( f ) =
⋅ ⎢sin c⎜ fT − ⎟ + sin c⎜ fT + ⎟⎥ ⋅ exp(− jπfT )
2 ⎣
2⎠
2 ⎠⎦
⎝
⎝
c. G c ( f ) = a ⋅ Gb (af )
a.
Ga ( f ) =
A⋅T
2
A⋅T ⎡
1⎞
1 ⎞⎤
⎛
⎛
⋅ ⎢sin c⎜ fT − ⎟ + sin c⎜ fT + ⎟⎥ ⋅ exp( jπfT )
2 ⎣
2⎠
2 ⎠⎦
⎝
⎝
e. G e ( f ) = Gb ( f ) + G d ( f )
Es una demostración.
Son demostraciones.
⎛
A 2 ⎪⎧ + ∞
n⎞
n ⎞⎤ ⎫⎪
⎛n⎞ ⎡ ⎛
Sg ( f )=
⋅ ⎨ ∑ sin c 2 ⎜ ⎟ ⋅ ⎢δ ⎜⎜ f − f c − ⎟⎟ + δ ⎜⎜ f + f c − ⎟⎟⎥ ⎬
16 ⎪⎩n = −∞
T0 ⎠
T0 ⎠⎥⎦ ⎪⎭
⎝ 2 ⎠ ⎢⎣ ⎝
⎝
Es una demostración.
d. G a ( f ) = −
3.
4.
5.
6.
7.
a.
b.
c.
d.
e.
8.
y (t ) =
SNRentrada = 50 dB
S salida = 5 dBm
N salida = −3.68 dBm
SNR salida = 8.68 dB
SNRentrada
(dB ) = 41.32 dB
SNR salida
+∞
∑a
n = −∞
n
+∞
⎛ 2πnt ⎞
⎛
⎛
2πnt ⎞
n⎞
⎟⎟ ; a n = c n ⋅ ∫ h(τ ) ⋅ exp⎜⎜ − j
⎟⎟ ⋅ dτ = c n ⋅ H ⎜⎜ f = ⎟⎟
⋅ exp⎜⎜ j
−
∞
T0 ⎠
T0 ⎠
⎝ T0 ⎠
⎝
⎝
1
9.
k1
2π
k
b. weq = 1
4
c. w90% ≈ 1.005 ⋅ k1
a.
w3dB =
d. w pn → ∞
10.
a.
b.
⎡ ⎛
1 ⎞
1 ⎞⎤
⎛
⋅ ⎢g⎜ t − t0 +
⎟ + g⎜ t − t0 −
⎟
2B ⎠
2 B ⎠⎥⎦
⎝
⎣ ⎝
a ⋅b ⎡ ⎛
1 ⎞
1 ⎞⎤
⎛
y (t ) = a 0 ⋅ g (t − t 0 ) + 0 1 ⋅ ⎢ g ⎜ t − t 0 +
⎟ − g⎜ t − t0 −
⎟
2
2B ⎠
2 B ⎠⎥⎦
⎝
⎣ ⎝
y (t ) = a 0 ⋅ g (t − t 0 ) +
a1
2
11.
⎛t⎞
⎛ π ⎞
g + (t ) = g~ (t ) ⋅ exp( j 2πf c t ) = sin c⎜ ⎟ ⋅ exp⎜ j t ⎟
⎝2⎠
⎝ 2 ⎠
π ⎞
⎛
⎛t⎞
g − (t ) = sin c⎜ ⎟ ⋅ exp⎜ − j t ⎟
2 ⎠
⎝
⎝2⎠
⎛t⎞
g~ (t ) = sin c⎜ ⎟
⎝2⎠
⎛t⎞
g c (t ) = sin c⎜ ⎟ ; g s (t ) = 0
⎝2⎠
⎛t⎞
a(t ) = sin c⎜ ⎟ ; φ (t ) = 0
⎝2⎠
b. g + (t ) = [1 + k ⋅ cos(2πf m t )] ⋅ exp( j 2πf c t )
g − (t ) = [1 + k ⋅ cos(2πf m t )] ⋅ exp(− j 2πf c t )
g~ (t ) = 1 + k ⋅ cos(2πf m t )
g c (t ) = 1 + k ⋅ cos(2πf m t ) ; g s (t ) = 0
a(t ) = 1 + k ⋅ cos(2πf m t ) ; φ (t ) = 0
12. Son demostraciones.
13.
AT
a. X ( f ) =
⋅ {sin c[( f − f c ) ⋅ T ] − sin c[( f + f c ) ⋅ T ]}
2j
b. X~ ( f ) = − jAT ⋅ sin c( fT )
2
2
~
⎛ πfT ⎞
c. H ( f ) = 1 + cos⎜
− ≤ f ≤
⎟
T
T
⎝ 2 ⎠
jAT ⎡
3
⎛1
⎞⎤
⎛3
⎞ 1
d. Y~ ( f ) = −
⋅ ⎢sin c( fT ) + ⋅ sin c⎜ ⋅ fT ⎟ + ⋅ sin c⎜ ⋅ fT ⎟⎥
2 ⎣
4
⎝2
⎠⎦
⎝2
⎠ 4
3
A ⎡
⎛1
⎞⎤ δ ( f − f c ) − δ ( f + f c )
⎛3
⎞ 1
e. Y ( f ) = ⋅ ⎢T ⋅ sin c( fT ) + ⋅ T ⋅ sin c⎜ ⋅ fT ⎟ + ⋅ T ⋅ sin c⎜ ⋅ fT ⎟⎥ ∗
2 ⎣
4
2j
⎝2
⎠⎦
⎝2
⎠ 4
a.
2
f.
y (t ) =
A ⎡ ⎛ t ⎞ 1 ⎛ 2t ⎞ 1 ⎛ 2t ⎞⎤
⋅ Π⎜ ⎟ + ⋅ Π ⎜ ⎟ + ⋅ Π⎜ ⎟ ⋅ sen(2πf c t )
2 ⎢⎣ ⎝ T ⎠ 2 ⎝ 3T ⎠ 2 ⎝ T ⎠⎥⎦
14.
3
μs
2π
10
b. τ g =
μs
2π
15. y (t ) = k ⋅ x c (t − τ g ) ⋅ cos 2πf c (t −τ
a. τ p =
16. R x (τ ) = 1 + f 0 ⋅ sin c
17. S N 2 ( f ) =
[
2
( f 0τ )
[
p
)] − k ⋅ x (t − τ ) ⋅ sen[2πf (t −τ )]
s
]
1
⋅ S N1 ( f − f c ) + S N1 ( f + f c )
2
18.
⎧ N0
⎪
S salida ( f ) = ⎨ 4 , f ≤ B
⎪⎩ 0 , resto
b. Media = 0
N B
Varianza = 0
2
a.
3
g
c
p
UNIVERSIDAD DE VALLADOLID
E.T.S. INGENIEROS DE TELECOMUNICACIÓN
TEORÍA DE LA COMUNICACIÓN
Tema 2: Modulaciones de Amplitud
Teoría de la Comunicación - Curso 2010-2011
TEMA II : Modulaciones de
Amplitud
22.1.-Introducción
1 I t d ió
2.2.-Modulación AM
2.3.-Modulación DSB-SC
2.4.-Modulación QAM
2.5.-Filtrado de bandas laterales
2 6 M d l ió VSB
2.6.-Modulación
2.7.-Modulación SSB
2.8.-Translación en frecuencia
2.9.-Multiplexación por división en frecuencia (FDM)
Tema II: Modulaciones de Amplitud
2.1. Introducción
El objetivo de un sistema de comunicación es transmitir
señales
ñ l de
d información
i f
ió a través
t é de
d un canall de
d
comunicación, que separa el transmisor y el receptor
El término banda-base se utiliza para denominar las
bandas de frecuencias que representa la señal original que
lleva información
La utilización eficiente del canal de comunicación
requiere desplazar las frecuencias ‘banda-base’ a otro
rango de frecuencias más adecuado para la transmisión ⇒
MODULACIÓN
1
Tema II: Modulaciones de Amplitud
2.1. Introducción
Modulación: se define como el proceso por el cual alguna
de las características de una portadora se modifica de
acuerdo con la señal de información:
Señal banda-base de información ⇒ señal moduladora
Señal resultante del proceso de modulación ⇒ señal modulada
En recepción, normalmente, se requiere restaurar o
devolver la señal modulada a su forma original ⇒
DEMODULACIÓN (proceso inverso a la modulación)
Tema II: Modulaciones de Amplitud
2.1. Introducción
Veremos dos tipos de modulación de onda continua:
Modulación de amplitud (AM): la amplitud de la señal portadora
sinusoidal varía en función de la señal moduladora
Modulación angular: el ángulo de la señal portadora sinusoidal
varía en función de la señal moduladora
Modulación de fase (PM): la fase de la señal portadora
sinusoidal varía en función de la señal moduladora
Modulación de frecuencia ((FM):
) la frecuencia de la señal
portadora sinusoidal varía en función de la señal moduladora
2
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
Generación de una señal AM
Consideremos la señal portadora c(t):
c(t ) = Ac cos(2πf ct )
Ac : amplitud de la portadora
f c : frecuencia de la portadora
Por simplificación asumimos que la fase de la portadora es cero :
φc = 0
Sea m(t)
S
( ) una señall banda-base
b d b
que contiene
i
la
l información
i f
ió
(señal moduladora), con ancho de banda ω.
La portadora c(t) es independiente de m(t)
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
La modulación de amplitud (AM) se define como el
de la pportadora c(t)
pproceso ppor el cual la amplitud
p
( ) varía en
torno a un valor medio de forma lineal con la señal
moduladora m(t)
La expresión de la señal modulada en AM es:
s(t ) = Ac [1 + ka m(t )] cos(2πf ct )
ka : constante denominada sensibilidad en amplitud del
modulador
Para que la envolvente de la señal modulada en AM siga la
forma de la señal banda-base m(t) se deben satisfacer 2
condiciones:
3
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
1º) | kam(t) | < 1
∀t
Si | kam(t) | < 1:
Aseguramos que 1+ kam(t) > 0
Envolvente de la señal s(t): Ac[1+ kam(t)]
Relación unívoca entre la envolvente de la señal AM y la señal
moduladora
Si | kam(t) | > 1:
Puede que 1+ kam(t) < 0; ⇒ la fase de la señal se invierte
siempre que 1+ kam(t) cambie de signo ⇒ Distorsión en la
envolvente Ö sobremodulación
Porcentaje de modulación: el valor absoluto máximo de kam(t)
multiplicado por 100 Ö max | kam(t) | x 100
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
( )S
(a)
Señal
ñ l banda
b d base
b
m(t)
()
(b) Señal AM con |kam(t)| < 1 ∀t
(c) Señal AM con |kam(t)| > 1
para algún t
4
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
2º) La frecuencia de la señal portadora fc sea mucho mayor que la
componente frecuencial superior de m(t): fc >> ω (ω es el ancho
de banda de m(t))
Calculamos la T.F. de la señal AM:
S( f ) =
Ac
k A
[δ ( f − f c ) + δ ( f + f c )] + a c [ M ( f − f c ) + M ( f + f c )]
2
2
Suponiendo que la señal moduladora m(t) está limitada en un
rango de frecuencias -ω ≤ f ≤ ω :
f (Hz)
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
Representación S ( f ) :
f (Hz)
5
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
Del gráfico deducimos:
La condición fc > ω asegura que las bandas laterales inferiores no se
solapen
En frecuencias positivas, la componente frecuencial superior es fc + ω,
y la componente frecuencial inferior fc - ω
El ancho de banda de transmisión de la señal AM se define como la
diferencia entre ambas:
BT = 2ω
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
Modulación de un tono simple
S ñ l moduladora:
d l d
t
i l
Señal
tono
simple
m ( t ) = Am cos( 2π f m t )
Am : amplitud de la señal moduladora
f m : frecuencia de la señal moduladora
Señal modulada AM:
s(t ) = Ac [1 + μ cos(2πf mt )] cos(2πf c t )
donde μ = k a Am ⇒ factor de modulación
⇒ si se expresa en % ⇒ porcentaje de modulación
⇒ μ < 1 ⇒ evitar sobremodulación
6
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
Ejemplo (dominio del tiempo):
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
Si μ < 1 (no sobremodulación):
Amax Ac (1 + μ )
A − Amin
=
⇒ μ = max
Amin Ac (1 − μ )
Amax + Amin
Desarrollando la señal:
s ( t ) = Ac [1 + μ cos( 2π f m t )] cos( 2π f c t )
s ( t ) = Ac cos( 2π f c t ) +
+
1
μ Ac cos[ 2π ( f c + f m ) t ] +
2
1
μ Ac cos[ 2π ( f c − f m ) t ]
2
7
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
Su T.F. :
S( f ) =
1
1
Ac [δ ( f − f c ) + δ ( f + f c )] + μAc [δ ( f − f c − f m ) + δ ( f + f c + f m )] +
2
4
1
μAc [δ ( f − f c + f m ) + δ ( f + f c − f m )]
4
⇒ deltas en ± f c , f c ± f m , -f c ± f m
+
Diferenciamos tres componentes:
Portadora: ± fc
B d llaterall superior
Banda
i (USB):
(USB) + fc + fm ; - fc - fm
Banda lateral inferior (LSB): fc - fm ; - fc + fm
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
En frecuencia:
|M(f) |
|C(f) |
f (Hz)
-fm
0
fm
f (Hz)
|S(f) |
2fm
-fc
0
-fc
0
fc
2fm
fc
f (Hz)
8
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
Potencia media de una señal x(t):
∞
Px = ∫ Gx ( f )df
−∞
Gx ( f ) =
∞
∑c
n = −∞
n
2
Gx ( f ) ≡ D.E.P. x(t )
δ ( f − nf o )
cn : coeficientes de Fourier de x(t )
Potencia de la componente portadora:
Ac
[δ ( f − f c ) + δ
2
1
Gc( f ) =
A c2 δ ( f − f c ) +
4
∞
A c2
P c = ∫ G c ( f ) df =
+
−∞
4
C ( f ) =
( f + f c )]
1
A c2 δ ( f + f c )
4
A c2
A c2
=
4
2
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
Potencia de la banda lateral superior (USB):
1
1
μ A cδ ( f − f c − f m ) + μ A cδ ( f + f c + f m )
4
4
1
1
G U SB ( f ) =
μ 2 A c2 δ ( f − f c − f m ) +
μ 2 A c2 δ ( f + f c + f m )
16
16
1
1
μ 2 A c2
PU S B =
μ 2 A c2 +
μ 2 A c2 =
16
16
8
U SB( f ) =
Potencia de la banda lateral inferior (LSB):
1
1
μ A cδ ( f − f c + f m ) + μ A cδ ( f + f c − f m )
4
4
1
1
G LSB ( f ) =
μ 2 A c2 δ ( f − f c + f m ) +
μ 2 A c2 δ ( f + f c − f m )
16
16
μ 2 A c2
PL SB =
8
L SB( f ) =
9
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
Se define la eficiencia en potencia:
η =
PSB
PT
PSB : Potencia
en bandas
PT : Potencia
μ 2 A c2
η =
laterales
total
+
μ 2 A c2
μ2
8
8
=
A c2
μ 2 A c2
μ 2 A c2
2+ μ
+
+
2
8
8
2
Si por ejemplo se utiliza 100% porcentaje de modulación (μ = 1), es
decir, se utiliza la máxima potencia en bandas laterales:
La potencia utilizada en la información transmitida es sólo 1/3 de la
potencia total
1
1
η =
=
1+ 2
3
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
1
0.9
Portadora
0.8
0.7
0.6
0.5
0.4
0.3
0.2
Bandas
laterales
0.1
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Factor de modulación
10
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
Transparencia: para μ < 0.2 la potencia en bandas laterales es
menor del 1% de la potencia de la señal AM ⇒ se desperdicia gran
cantidad de potencia
Resumen AM:
1) BT = 2ω
2) ηmax = 1/3
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
Modulador en cuadratura: generar señal AM
S requiere:
i
Se
Sumar portadora y señal moduladora
Elemento no lineal (diodos y transistores)
Filtrado paso-banda para extraer los productos de modulación
deseados (circuitos simple o doblemente sintonizado)
m(t)
Elemento
li l
no lineal
RL
c(t)
v1(t)
v2(t)
Circuito
sintonizado a fc
11
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
Detector de envolvente
Idealmente produce una señal de salida que sigue
la envolvente de la señal de entrada
Demodular señal AM
Se requiere señal de entrada de banda estrecha y
que no se produzca sobremodulación:
μ<1
fc >> ω
Tema II: Modulaciones de Amplitud
2.2.Modulación AM
Las señal s(t) es:
Y la salida del detector de envolvente:
12
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
Modulación DSB-SC (Double Side Band-Supressed
Carrier)
La señal portadora c(t) es independiente de la señal
moduladora m(t)
Transmitir la portadora significa desperdicio de potencia ⇒
sólo una parte de la potencia transmitida de la señal AM
lleva información
S l ió suprimir
Solución:
i i la
l componente
t de
d la
l portadora
t d
⇒ DSB-SC
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
Generación de una señal DSB-SC
i i la
l portadora,
d
l señal
ñ l modulada
d l d es proporcional
i l
Al suprimir
la
al producto de la portadora por la señal moduladora:
s ( t ) = c ( t ) m ( t ) = A c cos( 2 π f c t ) m ( t )
La señal modulada s(t) presenta cambio de fase cuando
m(t) cruce por cero ⇒ ahora la envolvente de la señal DSBSC no sigue a la señal moduladora
Modulador producto se representa:
m(t)
Modulador
producto
s(t) = m(t)c(t)
fc > ω
OSC c(t)
13
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
Ejemplo de señal DSBSC:
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
En frecuencia:
S( f ) =
1
Ac [ M ( f − f c ) + M ( f + f c )]
2
f (Hz)
14
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
|S(f) |
AcM(0)/2
( )
2ω
2ω
f (Hz)
DSB:
1) BT = 2ω
2) η = PSB/PT = (PUSB + PLSB )/(PUSB + PLSB ) = 1 ⇒ toda la potencia
se consume en transmitir la señal de información
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
Modulación de un tono simple
S ñ l moduladora
d l d
i
id l
Señal
sinusoidal:
m ( t ) = A m cos( 2 π f m t )
Señal modulada:
s ( t ) = m ( t ) c ( t ) = A c A m cos( 2 π f c t ) cos( 2 π f m t ) =
=
1
1
A c A m cos[( 2 π ( f c + f m ) t )] +
A c A m cos[( 2 π ( f c − f m ) t )]
2
2
Su T
T.F.
F :
1
A c A m [δ ( f − f c − f m ) + δ ( f + f c + f m ) +
4
+ δ ( f − f c + f m ) + δ ( f + f c − f m )]
S( f ) =
⇒ deltas en − f c ± f m ,
fc ± fm .
15
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
Detección coherente
La señal moduladora m(t) puede ser recuperada
multiplicando la señal DSBSC s(t) por una señal
sinusoidal generada de forma local y filtrando el
resultado
Asumiendo que el oscilador local está perfectamente
sincronizado en fase y frecuencia con la señal portadora
c(t) ⇒ detección coherente
s(t)
Modulador
v(t)
producto
A’ccos(2πfct)
Filtrado
paso bajo
vo(t)
Oscilador local
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
Demodulación DSB-SC de un tono simple:
D t ió coherente:
h
t asumimos
i
i
i
f t
Detección
sincronismo
perfecto
en fase y frecuencia entre transmisor y receptor
v(t ) = s(t )c ' (t ) =
Ac Ac' Am
cos[2π ( f c + f m )t ]cos(2π f c t ) +
2
Ac Ac' Am
cos[2π ( f c − f m )t ]cos(2π f c t ) ;
2
NOTA:c ' (t ) = Ac' cos(2πf c t )
+
v( t ) =
Ac Ac' Am
{cos[2π (2 f c − f m )t ] + cos[2π (2 f c + f m )t ] + cos((2π f mt ) + cos(2π f mt )}
4
16
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
Los términos a frecuencia 2fc ± fm son eliminados mediante filtrado
paso-bajo,
paso
bajo, obteniendo vo(t)
v o (t ) =
Ac Ac' A m
[cos( 2π f m t ) + cos( 2π f m t )]
4
Los dos términos son proporcionales a la señal de información, uno
procede de la banda lateral superior y otro de la banda lateral
inferior
Como hemos visto, hemos recuperado la señal moduladora
multiplicando s(t) por c’(t) y filtrando paso bajo
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
Estudiemos un caso más general: frecuencia fc y fase φ arbitraria:
v (t ) = Ac' cos(( 2π f c t + φ ) s (t ) = Ac Ac' cos(( 2π f c t + φ ) cos(( 2π f c t ) m (t ) =
=
1
1
Ac Ac' cos( 4π f c t + φ ) m (t ) + Ac Ac' cos( φ ) m (t )
2
2
Con un filtrado paso bajo se puede recuperar la señal de información:
v o (t ) =
1
Ac Ac' m ( t ) cos( φ )
2
Si φ(t) es constante ⇒ vo(t) es proporcional a m(t) ⇒ versión no
distorsionada de la señal moduladora
Si φ = 0 ⇒ amplitud máxima
Si φ = π/2 ⇒ vo(t) = 0 ⇒ efecto nulo en cuadratura
17
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
En la práctica el error de fase varía de forma aleatoria
debido a variaciones del canal de comunicación, por ello:
Se debe proveer una circuitería extra para que el oscilador local
esté en perfecto sincronismo en fase y frecuencia con la señal
portadora transmitida
Mayor complejidad del receptor: precio a pagar por eliminar
portadora para ahorrar potencia
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
Bucle de Costas
é d para mantener all receptor sincronizado
i
i d
Método
El sistema consiste en 2 detectores coherentes alimentados
con la misma señal de entrada s(t), pero con la señal
procedente del oscilador local en cuadratura
La frecuencia del oscilador local se ajusta para que sea la misma fc
((conocida a ppriori))
Canal superior: detector coherente en fase o canal I
Canal inferior: detector coherente en cuadratura o canal Q
18
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
Esquema del bucle de Costas:
((1/2)A
) ccos((φ))m(t)
()
s(t)=Accos(2πfct)m(t)
Señal
DSBSC
Modulador
producto
cos(2πfct+φ)
LPF
Comparador
de fases
VCO
Desfasador
-90º
sin(2πfct+φ)
Modulador
producto
LPF
(1/2)Acsin(φ)m(t)
VCO: oscilador controlado por tensión.
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
Comparador de fases: multiplica y filtra paso bajo
Si φ = 0 (hay sincronismo):
Canal I: Acm(t)/2
Canal Q: 0
Por ello, la salida del discriminador de fase es cero ⇒ la
entrada al VCO es cero ⇒ seguimos con la misma fase
Si φ > 0 (φ ≅ 0):
Canal I: ≅ Acm(t)/2
Canal Q: ≅ Ac φ m(t)/2. NOTA: sinφ ≅ φ cuando φ→0
Por ello, la entrada al VCO es positiva ⇒ se ajusta
disminuyendo la fase
Si φ < 0 (al contrario) ⇒ aumenta fase
19
Tema II: Modulaciones de Amplitud
2.3. Modulación DSB-SC
Canal en cuadratura: para ajustar la fase
C l en fase:
f
d
d l la
l señal
ñ l
Canal
demodular
El control de fase en recepción se detiene con la
modulación, y el enganche de fase debe reestablecerse
cuando vuelve a aparecer la modulación
⇒ No es problema para voz, pues el proceso de sincronización es
t rápido
tan
á id quee no see percibe
e ibe distorsión
di t ió
Tema II: Modulaciones de Amplitud
2.4. Modulación QAM
Modulación o multiplexación de amplitud en cuadratura
ladas en DSBSC de 2
Permite transmitir dos señales mod
moduladas
fuentes independientes ocupando el mismo ancho de banda
de transmisión y permitiendo su separación en el receptor
Es un esquema ahorrador de ancho de banda
Modulador
Se emplean
S
l
2 moduladores
d l d
producto
d t para cada
d señal
ñ l que
son alimentados con la portadora a misma frecuencia pero
diferenciadas en fase de 90º
20
Tema II: Modulaciones de Amplitud
2.4. Modulación QAM
Esquema:
Señal m1(t)
Modulador
producto
Accos(2πfct)
+
Σ
Desfasador
-90
90º
s(t) señal QAM
+
Acsin(2πfct)
Señal m2(t)
Modulador
producto
Tema II: Modulaciones de Amplitud
2.4. Modulación QAM
La señal QAM:
s (t ) = Ac cos(( 2πf c t ) m1 (t ) + Ac sin ( 2πf c t ) m2 (t )
donde m1(t) y m2(t) son dos señales diferentes aplicadas
a los moduladore s productos
Si ω es el ancho de banda de m1(t) y m2(t) ⇒ el ancho de
banda de s(t) es 2ω y centrado en fc
Las componentes en fase y cuadratura de s(t) son:
sc (t) = Ac m1(t)
ss (t) = − Acm2 (t)
21
Tema II: Modulaciones de Amplitud
2.4. Modulación QAM
Demodulador
E
Esquema:
(1/2)AcA’cm1(t)
Modulador
producto
LPF
Señal
A’ccos(2πfct)
QAM
Desfasador
-90º
A’csin(2πfct)
Modulador
producto
LPF
(1/2)AcA’cm2(t)
Tema II: Modulaciones de Amplitud
2.4. Modulación QAM
Para que el sistema funcione correctamente es importante
sincronizar correctamente la portadora del oscilador en
emisión y recepción
La técnica QAM se usa para la difusión de la TV en color,
enviándose además un pulso de sincronismo para mantener
el oscilador local del receptor a la frecuencia y fase correcta
respecto a la del emisor
22
Tema II: Modulaciones de Amplitud
2.5. Filtrado de bandas laterales
Vamos a estudiar métodos para procesar señales DSB-SC y
generar modulación VSB y SSB (se explicarán en los
apartados siguientes)
Método discriminador de frecuencia
Esquema:
m(t)
Modulador
producto
u(t)
Filtrado
paso banda
H(f)
Accos(2πfct)
s(t)
Señal
modulada
Tema II: Modulaciones de Amplitud
2.5. Filtrado de bandas laterales
u ( t ) = A c m ( t ) cos( 2 π f c t ) : señal
DSBSC
Ac
S ( f ) = U ( f )H ( f ) =
[ M ( f − f c ) + M ( f + f c )] H ( f )
2
Donde M(f) es la T.F. de m(t)
Problema: determinar las condiciones de H( f ) para que
m(t) pueda ser recuperada a partir de s(t) usando un
detector coherente.
s(t)
Señal
modulada
Modulador
producto
A’ccos(2πfct)
v(t)
Filtrado
paso bajo
vo(t)
Señal
demodulada
23
Tema II: Modulaciones de Amplitud
2.5. Filtrado de bandas laterales
v ( t ) = Ac' s ( t ) cos( 2π f c t )
A c'
[ S ( f − f c ) + S ( f + f c )]
2
Sustituyendo en S( f ):
A A'
V ( f ) = c c M ( f )[ H ( f − f c ) + H ( f + f c )] +
4
Ac Ac'
+
[ M ( f − 2 f c ) H ( f − f c ) + M ( f + 2 f c ) H ( f + f c )]
4
V(f)=
Tras el filtrado paso-bajo:
Vo ( f ) =
A c A c'
M ( f )[ H ( f − f c ) + H ( f + f c )]
4
Tema II: Modulaciones de Amplitud
2.5. Filtrado de bandas laterales
Requerimos que Vo( f ) sea una versión escalada de M( f ) (así vo(t)
α m(t) ); lo que se puede cumplir si:
H ( f − fc ) + H ( f + fc ) = 2H ( fc )
Si M( f ) está definida en -ω ≤ f ≤ ω sólo necesitamos que se
cumpla lo anterior en el intervalo -ω ≤ f ≤ ω
Por ejemplo, si H( fc ) = 1/2 :
H ( f − fc ) + H ( f + fc ) = 1
-ω ≤ f ≤ ω
⇒ gran flexibilidad en la elección de H ( f ) para
satisfacer esa condición
24
Tema II: Modulaciones de Amplitud
2.5. Filtrado de bandas laterales
Método discriminador de fase
S ñ l s(t)
(t) es paso banda
b d ⇒ representación
t ió en forma
f
Señal
canónica:
s ( t ) = s I ( t ) cos( 2π f c t ) − s Q sin( 2π f c t )
s I ( t ) : componente en fase
s Q ( t ) : componente en cuadratura
Componente
p
en fase (p
(problema 1.12):
)
-ω ≤ f ≤ ω
⎧S ( f − f c ) + S ( f + f c )
SI ( f ) = ⎨
0
resto
⎩
A
donde S ( f ) = c [ M ( f − f c ) + M ( f + f c )] H ( f )
2
Tema II: Modulaciones de Amplitud
2.5. Filtrado de bandas laterales
Ac
A
M ( f )[ H ( f − f c ) + H ( f + f c )] = c M ( f ) ;
2
2
cuando H ( f − f c ) + H ( f + f c ) = 1
⇒ SI ( f ) =
⇒ s I (t ) =
-ω ≤ f ≤ ω
1
Ac m (t )
2
Componente en cuadratura (problema 1.12):
⎧ j[ S ( f − f c ) − S ( f + f c )]
SQ ( f ) = ⎨
⎩0
-ω ≤ f ≤ ω
resto
Se deduce:
SQ ( f ) =
j
Ac M ( f )[ H ( f − f c ) − H ( f + f c )]
2
-ω ≤ f ≤ ω
25
Tema II: Modulaciones de Amplitud
2.5. Filtrado de bandas laterales
Entonces, se puede generar sQ(t), excepto por un factor de
escala, pasando m(t) a través de un filtro con función de
transferencia:
H Q ( f ) = j[ H ( f − f c ) − H ( f + f c )]
-ω ≤ f ≤ ω
Sea m’(t) la salida de este filtro con entrada m(t):
s q (t ) =
1
Ac m ' (t )
2
Representación en forma canónica:
s (t ) =
1
1
A c m ( t ) cos( 2 π f c t ) −
A c m ' ( t ) sin ( 2 π f c t )
2
2
Tema II: Modulaciones de Amplitud
2.5. Filtrado de bandas laterales
Con ello, se deduce el esquema del método discriminador
en fase (salvo factor de escala 1/2):
m(t)
Modulador
producto
Accos(2πfct)
HQ(f)
m’(t)
OSC
Desfasador
D f d
-90º
+
Σ
s(t)
-
Acsin(2πfct)
Modulador
producto
26
Tema II: Modulaciones de Amplitud
2.5. Filtrado de bandas laterales
Observamos:
La componente en fase es independiente del filtro paso banda H( f )
H( f ) afecta sólo a la componente en cuadratura
El papel de la componente en cuadratura es interferir con la
componente en fase para reducir o eliminar potencia en una de las
bandas laterales de s(t)
Estos métodos se usan en la modulación VSB y SSB
Tema II: Modulaciones de Amplitud
2.6. Modulación VSB
Vestigial Side Band Modulation (Modulación en banda
lateral residual)
Se transmite completamente una banda lateral (superior o
inferior) y una pequeña parte de la otra banda (banda
residual)
Método discriminador de frecuencia
Para generar una señal modulada VSB que contenga un residuo de
la banda lateral inferior (LVSB) usaremos el siguiente filtro
normalizado (sólo se han representado las frecuencias positivas):
27
Tema II: Modulaciones de Amplitud
2.6. Modulación VSB
|H(f)|
1
0.5
f (Hz)
0
fc-fv
fc
fc+ fv
fc+ω
Tema II: Modulaciones de Amplitud
2.6. Modulación VSB
La respuesta
en frecuencia del filtro en torno a fc tiene q
que cumplir:
p
p
H ( f − fc ) + H ( f + fc ) = 1
−ω ≤ f ≤ ω
Como fv es el ancho de banda de la banda residual ⇒ BT = ω + fv
Método discriminador en fase:
HQ ( f ) = j[H( f − fc ) − H( f + fc )]
−ω ≤ f ≤ ω
28
Tema II: Modulaciones de Amplitud
2.6. Modulación VSB
HQ(f)/j
1
fv
f (Hz)
-fv
-1
Tema II: Modulaciones de Amplitud
2.6. Modulación VSB
Aplicación a la señal de televisión:
La circuiteria para demodular la señal debería ser lo más sencilla
posible (receptores baratos) ⇒ detector de envolvente ⇒ añadir
portadora a señal VSB
Se transmite la banda lateral superior (USB), el 25% de la banda
lateral inferior (LSB) y la portadora (hay portadora tanto de imagen
como de sonido)
En la transmisión de la señal de TV, no se transmite la señal VSB
debido a que la forma en región de transmisión no se controla de
forma rígida, en su lugar se inserta filtro VSB en recepción (ver
diapositivas siguientes)
29
Tema II: Modulaciones de Amplitud
2.6. Modulación VSB
Máximo campo radiado relativo a la
portadorra de imagen
Espectro ideal de una señal de TV:
1.25
0.5
4.5 (MHz)
0.25
0.75
Portadora
Portadora
de imagen
de sonido
f (Mhz)
0
54
56
58
60
Tema II: Modulaciones de Amplitud
2.6. Modulación VSB
Respuesta en amplitud de un filtro VSB en el receptor:
respuesta normalizada
Ancho de banda del canal (6 MHz)
1
0.5
Portadora
Portadora
de imagen
de sonido
0
f (Mhz)
54
56
58
60
30
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
Single Side Band Modulation (banda lateral única)
Sólo se transmite una banda lateral (superior o inferior)
Sea m(t) banda base con M(f) definida entre -ω ≤ f ≤ ω
como:
f (Hz)
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
Señal DSBSC:
|S(f) |
2ω
2ω
AcM(0)/2
f (Hz)
31
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
Señal SSB con banda lateral superior :
|S(f)|
AcM(0)/2
-fc- ω
fc
-fc
f (Hz)
fc+ ω
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
Señal SSB con banda lateral inferior:
|S(f)|
AcM(0)/2
f (Hz)
-fc
-fc+ ω
fc- ω
fc
32
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
Ventajas:
1) BT = ω
2) η = 1
Desventajas: mayor coste y complejidad
En la realidad, la señal M(f) debe ser nula en torno al origen
⇒ gap de energía.
Este requerimiento se satisface por la señal de voz, con un
gap de energía de ancho 600 Hz (-300 Hz a 300 Hz)
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
Espectro de una señal m(t) con un gap de energía centrado
en el origen
|M(f)|
gap de
energía
f (Hz)
-fb
-fa
0
fa
fb
33
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
Espectro de una señal SSB con banda lateral superior:
|S(f)|
f (Hz)
-fc -fb
-fc -fa -fc
0
fc fc +fa
fc +fb
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
Requerimientos de filtro paso-banda:
L banda
b d lateral
l t l deseada
d
d esté
té dentro
d t de
d la
l banda
b d de
d paso
La
del filtro
La banda lateral a eliminar esté dentro de la banda
eliminada o de rechazo del filtro
Este discriminador de frecuencia puede lograrse
utilizando filtros altamente selectivos en frecuencia que
pueden
d ser realizados
li d por resonadores
d
de
d cristal
i l
34
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
Modulación señal SSB
Método discriminador en frecuencias
|H(f)|
-fc- ω
fc+ω
fc
0
-fc
H ( f − fc ) + H ( f + fc ) = 1
f (Hz)
−ω ≤ f ≤ ω
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
Método discriminador de fase:
HQ( f )=j[H( f-fc )-H( f+fc )] ;
-ω≤f≤ω
HQ(f)/j
f (Hz)
H Q ( f ) = − jsign ( f ) ⇒ función de transferen cia
de la transforma da de Hilbert
^
⇒ m (t ) = m (t )
'
m' (t ) es la T. Hilbert de m (t )
35
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
Señal SSB con banda lateral superior
s (t ) =
^
1
1
Ac m (t ) cos( 2π f c t ) − Ac m (t ) sin ( 2πf c t )
2
2
Señal SSB con banda lateral inferior: se cambia el signo ‘-’
por ‘+’
El modulador para generar la señal SSB según el diagrama
de bloques del método discriminador de fase se llama
modulador de Hartley (ver diapositiva siguiente)
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
Modulador de Hartley:
m(t)
Modulador
producto
Accos(2πfct)
Transformador
de Hilbert
^
m(t )
OSC
Desfasador
D
f d
-90º
+
Σ
s(t)
-
Acsin(2πfct)
Modulador
producto
36
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
Demodulación señal SSB
D
d l ió mediante
di t detección
d t ió coherente:
h
t
Demodulación
s(t)
Señal
modulada
Modulador
producto
v(t)
Filtrado
paso bajo
Ac’cos(2πfct)
vo(t)
Señal
demodulada
Suponiendo que se transmite la banda superior:
^
1
1
Ac m (t ) cos( 2πf c t ) − Ac m (t ) sin ( 2πf c t )
2
2
^
1
'
v (t ) = Ac Ac cos( 2πf c t )[ m (t ) cos( 2πf c t ) − m (t ) sin ( 2πf c t )] =
2
s (t ) =
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
=
^
1
1
A c A c' m ( t ) +
A c A c' [ m ( t ) cos( 4 π f c t ) − m ( t ) sin ( 4 π f c t )]
4
4
Eliminado con filtro paso bajo
1
v o (t ) =
A c A c' m ( t )
4
Para que sea realizable, necesitamos en recepción una señal
sinusoidal sincronizada en fase y frecuencia con la
portadora transmitida. Para ello hay dos métodos:
1º) Transmitimos una portadora piloto junto a la señal SSB
2º) Utilizamos en recepción un oscilador muy estable en frecuencia
37
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
Con 2º método: estudio distorsión por fase Ac’cos(2πfct+φ)
^
1
Ac Ac' cos(( 2πf c t + φ )[ m (t ) cos(( 2πf c t ) − m (t ) sin ( 2πf c t )] =
2
^
^
1
⎤
⎡
= Ac Ac' ⎢ m (t ) cos( 4πf c t + φ ) + m (t ) cos( φ ) + m (t ) sin (φ ) − m (t ) sin ( 4πf c t + φ ) ⎥
4
⎦
⎣
^
1
vo (t ) = Ac Ac' [ m (t ) cos( φ ) + m (t ) sin (φ )]
4
v (t ) =
Su T.F. :
^
1
A c A c' [ M ( f ) cos( φ ) + M ( f ) sin ( φ )]
4
Vo ( f ) =
^
donde
M ( f ) = − jsign ( f ) M ( f )
⎧1
'
⎪⎪ 4 A c A c M ( f ) exp( − j φ ) ;
Vo ( f ) = ⎨
⎪ 1 A c A c' M ( f ) exp( j φ ) ;
⎪⎩ 4
f > 0
f < 0
Tema II: Modulaciones de Amplitud
2.7. Modulación SSB
⇒ Error de fase en oscilador da lugar a una
distorsión de fase
Este desfase no suele ser problema para la voz, ya que el
oído humano es relativamente insensible a la distorsión en
fase. Se corre el riesgo de producirse el llamado efecto voz
del pato Donald
En el caso de la música o el vídeo, la distorsión de fase es
inaceptable
38
Tema II: Modulaciones de Amplitud
2.8. Translación en frecuencia
Cuando es necesario trasladar una señal modulada en una
banda de frecuencias a otra banda de frecuencias
Se consigue usando un mezclador: multiplicador + filtro
paso banda
s1(t)
Modulador
producto
Señal
modulada a
f1
Filtrado
paso banda
v(t)
Aecos(2πfet)
s2(t)
Señal
modulada
a f2
Señal s1(t): modulada DSB-SC a f1
s1 ( t ) = Ac m ( t ) cos( 2π f 1t )
Tema II: Modulaciones de Amplitud
2.8. Translación en frecuencia
Si m(t) está limitada en banda | f | < ω ⇒ s1(t) está limitada entre
f1- ω < | f | < f1+ ω :
|S1(f) |
2ω
2ω
f (Hz)
-f1-ω
-f1
-f1+ω
f1-ω
f1
f1+ω
39
Tema II: Modulaciones de Amplitud
2.8. Translación en frecuencia
Si queremos trasladar a una frecuencia mayor f2 > f1:
f 2 = f1 + f e ⇒ f e = f 2 − f1
v ( t ) = s1 (t ) Ae cos( 2π f e t ) = Ac Ae m (t ) cos( 2π f1t ) cos( 2π f e t ) =
=
Ac Ae
A A
m ( t ) cos[ 2π ( f 1 − f e ) t ] + c e m ( t ) cos[ 2π ( f1 + f e )t ]
2
2
DSB-SC a f1-fe
DSB-SC a f1+fe
Si f2 = f1 + fe es la señal buscada: filtro paso banda centrado
en f2 y ancho de banda 2ω
s 2 (t ) =
Ac Ae
A A
m (t ) cos[ 2π ( f1 + f e )t ] = c e m (t ) cos( 2π f 2 t )
2
2
Tema II: Modulaciones de Amplitud
2.8. Translación en frecuencia
2ω
2ω
|V(f) |
2ω
2ω
f (Hz)
-f1-fe
-f1+fe
f1-fe
f1+fe
40
Tema II: Modulaciones de Amplitud
2.8. Translación en frecuencia
||S2(f) |
2ω
2ω
f (Hz)
-f1-fe
f1+fe
Tema II: Modulaciones de Amplitud
2.8. Translación en frecuencia
Condición: no se solapen espectros
f1 − f e + ω < f1 + f e − ω
⇒ ω < f e ⇒ ω < f 2 − f1
Para disminuir frecuencia: f2 = f1 - fe ⇒ fe = f1 - f2
⇒ condición global: ω < |f1 - f2|
41
Tema II: Modulaciones de Amplitud
2.9. Multiplexación por división
en frecuencia (FDM)
Multiplexación: proceso por el cual varias señales
independientes de características similares se
pueden combinar de algún modo para ser
transmitidas de forma conjunta por el mismo canal
de comunicación
Tipos de multiplexación
FDM (Multiplexación por división en frecuencia)
TDM (Multiplexación por división en el tiempo)
WDM (Multiplexación por división en longitud de
onda)
Tema II: Modulaciones de Amplitud
2.9. Multiplexación por división
en frecuencia (FDM)
Diagrama
g
de bloques
q
de un sistema FDM:
Entradas
Filtros
paso bajo
Moduladores
Transmisor
Filtros
paso banda
Filtros
paso banda
Demoduladores
Filtros
paso bajo
Salidas
Receptor
42
Tema II: Modulaciones de Amplitud
2.9. Multiplexación por división
en frecuencia (FDM)
FDM:
Aunque se suponen señales paso bajo, se emplean filtros paso bajo
para eliminar componentes no deseadas a altas frecuencias
Se aplica al modulador una portadora adecuada para ocupar
intervalos de frecuencia mutuamente excluyentes ⇒ generador de
portadora
Los métodos de modulación que se emplean son algunos de los
estudiados.
estudiados
Por ejemplo: para las señales de voz provenientes de las
conversaciones telefónicas se usa SSB con ancho aproximado de 4
KHz para cada canal de entrada
Filtro paso banda (BP) para restringir la banda de cada señal
modulada a su rango asignado
Tema II: Modulaciones de Amplitud
2.9. Multiplexación por división
en frecuencia (FDM)
En recepción se usan los mismos filtros paso banda y se recupera la
señal en demoduladores individuales
Este sistema funciona sólo en un sentido ⇒ habrá que utilizar otro
similar en el sentido inverso
Ejemplo: caso telefónico con conversaciones de voz.
Esquema (diapositiva siguiente)
Normalmente FDM suele requerir varias etapas de modulación y
demodulación. La primera etapa combina 12 señales de voz en un
grupo básico
Banda de voz: 4 KHz
Valores de portadora: fc = 60 + 4n KHz;
n = 1,2, . . .,12
Se seleccionan mediante filtros paso banda las 12 bandas laterales
inferiores ⇒ ocupando rango: 60 → 108 KHz (modulación SSB)
43
Tema II: Modulaciones de Amplitud
2.9. Multiplexación por división
en frecuencia (FDM)
Pasos a seguir para la modulación en un sistema FDM:
frecuencias portadoras (KHz)
de las señales de voz
frecuencias portadoras (KHz)
de los grupos
Super-grupo de 5
grupos
Señal de voz
Grupo básico de
12 señales de voz
Tema II: Modulaciones de Amplitud
2.9. Multiplexación por división
en frecuencia (FDM)
Super-grupo: se combinan 5 grupos básicos con:
fc = 372 + 48n KHz ;
n = 1,2, . . .,5
Se seleccionan las 5 bandas laterales inferiores con el rango
312 KHz → 552 KHz
Obtenemos 60 conversaciones independientes
Los super-grupos se pueden combinar y así sucesivamente
Con SSB necesitamos sincronismo de portadora entre el
transmisor y el receptor para la detección coherente.
Se transmite una frecuencia portadora piloto. Dicha
portadora piloto modula el generador de portadora y
obtenemos todas las portadoras necesarias
44
TEORÍA DE LA COMUNICACIÓN
CUESTIONES TEMA 2
MODULACIONES DE AMPLITUD
1.- Definir modulación, señal moduladora, señal portadora y señal modulada. Tipos de
modulación. ¿Qué es demodular una señal?
2.- Expresión de una señal AM. ¿Cuál es la sensibilidad en amplitud?
3.- ¿Cuándo hay sobremodulación en AM?, ¿por qué no es deseable y cómo se puede
evitar?
4.- ¿Cuáles son las tres componentes en frecuencia de una señal AM?, ¿cuál es el ancho de
banda de la señal modulada en función del ancho de banda de la señal moduladora?
5.- ¿Cómo se define el índice de modulación?. ¿Cuál es su rango de valores para que no
tengamos sobremodulación?
6.- ¿Cuál es la eficiencia en potencia máxima en AM?
7.- ¿Cuál es la expresión de una señal DSBSC?. ¿Cuál es su ancho de banda en función del
ancho de banda de la señal moduladora?. ¿Cuál es su eficiencia en potencia?
8.- Explicar el esquema de detector coherente. ¿Cuándo se dice que ocurre el efecto nulo
en cuadratura?
9.- Explicar el Bucle de Costas.
10.- Esquema modulador y demodulador de QAM.
11.- Expresión de una señal SSB. ¿Qué dos tipos de SSB existen (caracterizarlos
cualitativamente en frecuencia)?. Ancho de banda y eficiencia en potencia.
12.- Filtrado de bandas laterales: método discriminador de frecuencias y método
discriminador de fase.
13.- Demodulador coherente de SSB. Efecto de un error de fase en la recuperación de la
portadora.
14.- Expresión de una señal VSB. ¿Qué dos tipos de VSB existen (caracterizarlos
cualitativamente en frecuencia)?. Ancho de banda y eficiencia en potencia.
15.- Componentes en fase y cuadratura para los diferentes tipos de modulación en
amplitud.
16.- ¿Qué es un mezclador y para qué sirve?. Diagrama de bloques.
17.- Multiplexación por división en frecuencia (FDM).
TEORÍA DE LA COMUNICACIÓN
PROBLEMAS TEMA 2
MODULACIONES DE AMPLITUD
1.- Para un diodo de unión p-n, la relación entre la corriente que pasa a través de dicho
diodo y la tensión aplicada en sus bornas viene dada por:
⎡ ⎛ v
i = I 0 ⎢exp⎜⎜ ⎣ ⎝ VT
⎞ ⎤
⎟⎟ − 1⎥
⎠ ⎦
donde I0 es la corriente inversa de saturación y VT es la tensión equivalente de temperatura
definida por:
VT =
kT
e
donde k es la constante de Bolzmann en Julios por grados Kelvin, T es la temperatura
absoluta en grados Kelvin y e es la carga del electrón en C. A temperatura ambiente VT =
0.026 V.
a) Realizar la expansión de i en serie de potencias de v, hasta el término de orden v3.
b) Sea:
v(t)=0.01 cos( 2 πf m t) + 0.01 cos( 2 πf c t) Volts
donde fm = 1 KHz y fc = 100 KHz. Determina el espectro de la corriente i(t) resultante.
c) Especificar las características del filtro paso banda requerido para extraer de la corriente
del diodo i(t) una señal AM a la frecuencia fc.
d) ¿Cuál es el tanto por ciento de modulación de esta señal AM?
2.- En este problema se va a estudiar el funcionamiento del modulador AM en cuadratura.
Este modulador consta de un determinado dispositivo no-lineal seguido por un filtro pasobanda. El dispositivo no lineal está representado por la siguiente ley cuadrática:
v 0 (t ) = a1vi (t ) + a 2 vi2 (t )
donde a1 y a 2 son constantes, vi (t ) es la señal de entrada, y v0 (t ) es la señal de salida. La
señal de entrada vi (t ) es la suma de una señal moduladora m(t ) y una señal portadora
c(t ) . Sea m(t ) la señal moduladora limitada en frecuencia en el intervalo entre
− W ≤ f ≤ W , y c(t ) la portadora a frecuencia f c y amplitud Ac .
a) Evaluar la salida v0 (t ) del dispositivo no-lineal
b) Evaluar la salida en frecuencia V0 ( f ) del dispositivo no lineal en función de la
transformada de Fourier de la señal moduladora M ( f ) , y representarla en frecuencia para
un espectro de la señal moduladora de forma triangular, indicando a qué corresponde cada
uno de los diferentes términos.
c) Especificar las características del filtro paso-banda y las condiciones necesarias para que
a la salida del filtro tengamos la señal AM deseada. ¿Qué sensibilidad en amplitud tiene la
señal AM modulada?
3.- Supóngase que se dispone de dispositivos no lineales para los que la relación entre la
corriente de salida io y la tensión de entrada vi es la siguiente:
i o = a 1 v i + a 3 v 3i
donde a1 y a3 son constantes. Explicar como se puede utilizar dichos dispositivos para
obtener:
a) un modulador producto.
b) un modulador de amplitud.
1
de modo que 1 + kam(t) sea
ka
mayor que cero para todo t. Suponer que el espectro de m(t) es cero para f > W . Sea:
4.- Considerar una señal moduladora m(t) con m(t) ≤
s(t) = A c [1 + ka m ( t )]cos( 2 πf c t )
donde fc > W.
a) La señal modulada s(t) se aplica a un rectificador de onda completa, cuya salida es:
v 1 ( t) = s(t)
Determinar el espectro de v1(t).
b) Si la salida del rectificador v1(t) se pasa a través de un filtro paso bajo ideal definido por
la función de transferencia:
⎧1
H(f) = ⎨
⎩0
para f < W
para f > W
mostrar que si la salida es v2(t), está relacionada con m(t) por:
v 2 ( t) =
2A c
[1 + k a m(t)]
π
5.- ¿Cómo puede recuperarse la señal de información m(t) de una señal AM que está
sobremodulada? Justifica la respuesta de forma analítica y gráfica.
6.- Suponiendo que se demodula una señal DSBSC utilizando un detector coherente:
a) Evaluar el efecto de un error en la frecuencia del oscilador local del detector de Δf,
medido con respecto a la frecuencia portadora de la señal DSBSC.
b) Para el caso de una señal moduladora sinusoidal, mostrar como por causa de este error,
la señal demodulada presenta un efecto de batido a la frecuencia error Δf. Ilustrar la
respuesta dibujando la señal demodulada.
7.- Considerar la señal DSBSC:
s(t) = A c cos(2πf c t) m(t)
donde Accos(2πfct) es la señal portadora y m(t) es la señal moduladora. Esta señal
modulada se aplica a un detector de ley cuadrática caracterizada por:
y(t) = s2(t)
La salida y(t) se aplica a un filtro de banda estrecha con amplitud en la banda de paso
unidad, centrado en la frecuencia 2fc y con ancho de banda Δf. Supongamos que Δf es
suficientemente pequeño como para considerar el espectro de y(t) esencialmente constante
dentro de la banda de paso del filtro.
a) Determinar el espectro de la señal de salida del dispositivo con ley cuadrática y(t).
b) Mostrar que la salida del filtro v(t) es aproximadamente sinusoidal, y viene dada por:
v(t) ≅
A c2
E Δf cos(4 πf c t)
2
donde E es la energía de la señal m(t).
8.- Considerar un sistema QAM emisor y otro receptor. Si la señal de salida del emisor
QAM s(t) se transmite por un canal de comunicaciones con función global de transferencia
H(f), probar que la condición:
H(fc + f) = H*(fc - f)
para f ≤ W
es necesaria para que las señales recuperadas en el receptor QAM sean proporcionales a
m1(t) y m2(t) que son las señales originales de información del canal I y del Q
respectivamente, donde fc es la frecuencia de la portadora y W es el ancho de banda de las
señales que llevan información m1(t) y m2(t).
9.- Considerar la siguiente señal modulada:
s(t) = A c cos(2 πf c t) + m(t)cos(2πf c t) - m̂(t)sin(2πf c t)
que representa una señal SSB con portadora, donde m(t) es la señal moduladora y m̂(t) su
transformada de Hilbert. Determinar bajo que condiciones la salida de un detector de
envolvente ideal, si la entrada es s(t), es una buena aproximación para la señal moduladora
m(t).
10.- Sea una señal moduladora sinusoidal m(t) = Am cos(2πfmt) que se utiliza para generar
una señal VSB:
1
1
s(t) = aAm Ac cos[2π ( f c + f m )t ] + Am Ac (1 - a)cos[2π ( f c − f m )t ]
2
2
donde a es una constante menor que la unidad, que representa la atenuación de la banda
lateral superior.
a) Encontrar la componente en fase y la componente en cuadratura de la señal VSB así
definida.
b) Esta señal VSB junto con la portadora Ac cos(2πfct) se pasa a través de un detector de
envolvente. Determinar la distorsión producida por la componente en cuadratura.
c) ¿Cuál es el valor de la constante a para el cual la distorsión afecta en menor grado?
11.- Considerar un sistema múltiplex en el cual cuatro señales de entrada m1(t), m2(t), m3(t)
y m4(t) son multiplicadas por las cuatro portadoras siguientes:
[cos(2 π f a t) + cos(2 π f b t)]
[cos(2 π f a t + α 1 ) + cos(2 π f b t + β 1 )]
[cos(2 π f a t + α 2 ) + cos(2 π f b t + β 2 )]
[cos(2 π f a t + α 3 ) + cos(2 π f b t + β 3 )]
y las señales DSBSC resultantes se suman para transmitir el resultado por el mismo canal de
comunicaciones. En el extremo receptor, la demodulación se hace multiplicando la señal
suma transmitida por las cuatro portadoras separadamente utilizadas en el transmisor, y
después filtrando para eliminar las componentes no deseadas.
a) Determinar que condiciones deben satisfacer α1, α2, α3 y β1, β2, β3 de modo que la salida
del demodulador k sea proporcional a mk(t) para k = 1, 2, 3, 4.
b) Determinar la mínima separación de las frecuencia portadoras fa y fb en relación con el
ancho de banda de las señales moduladoras mk(t) de modo que el funcionamiento del
sistema sea el correcto.
TEORÍA DE LA COMUNICACIÓN
SOLUCIONES DE LOS PROBLEMAS TEMA 2
MODULACIONES DE AMPLITUD
1.
2
a.
b.
c.
d.
3
i
v
1 ⎛ v ⎞
1 ⎛ v ⎞
≈−
+ ⋅ ⎜⎜ ⎟⎟ − ⋅ ⎜⎜ ⎟⎟
I0
VT 2 ⎝ VT ⎠
6 ⎝ VT ⎠
i
≈ 0.074 − 0.406 ⋅ [cos(2πf m t ) + cos(2πf c t )] +
I0
+ 0.037 ⋅ {cos(4πf m t ) + cos(4πf c t ) + 2 ⋅ cos[2π ( f c + f m )t ] + 2 ⋅ cos[2π ( f c − f m )t ]} −
− 0.0016 ⋅ [cos(6πf m t ) + cos(6πf c t )] −
− 0.0071 ⋅ {cos[2π ( f c + 2 f m )t ] + cos[2π ( f c − 2 f m )t ] +
+ cos[2π (2 f c + f m )t ] + cos[2π (2 f c − f m )t ]}
f c = 100 KHz ; BW = 2 KHz
i
≈ −0.406 ⋅ [1 − 0.362 ⋅ cos(2πf m t )] ⋅ cos(2πf c t ) ⇒ μ = 0.362 ⇒ % Modulación : 36.2%
I0
2.
a.
b.
⎡ 2a
⎤
a A2
v 0 (t ) = a1 ⋅ m(t ) + a1 Ac ⋅ ⎢1 + 2 ⋅ m(t )⎥ ⋅ cos(2πf c t ) + a 2 ⋅ m 2 (t ) + 2 c ⋅ [1 + cos(4πf c t )]
a1
2
⎣
⎦
1
2
3
4
c. El filtro paso-banda tiene que estar centrado en: fc, con un ancho de banda: 2w,
de forma que se cumpla: fc >3w.
2a
La sensibilidad en amplitud es: K a = 2
a1
1
3.
a. Señal DSB-SC
Dispositivo
no lineal
Filtro paso
banda (fc, 2w)
Ac ⋅ cos (πf c t )
s (t ) =
m(t )
3
⋅ a 3 Ac2 ⋅ m (t ) ⋅ cos (2πf c t )
2
f c > 6w
b. Señal AM
Dispositivo
no lineal
Filtro paso
banda (fc, 2w)
Ac ⋅ cos (πf c t )
m(t )
+
∑
+
A0
3a 3 Ac2
s (t ) =
⋅ [A0 + m (t )] ⋅ cos (2πf c t )
2
f c > 6w
Ac ⋅ cos (πf c t )
Dispositivo
no lineal
4.
a.
V1 ( f ) =
2
π
+∞
⋅∑
Filtro paso
banda (fc, 2w)
(− 1)n ⋅ {S [ f + (2n + 1) f ] + S [ f − (2n + 1) f ]}
c
c
2n + 1
b. Es una demostración.
5. Se puede utilizar un detector coherente, con un filtro paso-bajo de ancho de banda:
w.
Ac Ac'
(
)
v0 t =
⋅ [1 + K a m(t )]
2
6.
A A'
a. Tras el filtrado paso-bajo: v o (t ) = c c ⋅ m(t ) ⋅ cos(2πΔft )
2
Ac Ac' Am
A A' A
⋅ cos[2π ( f m + Δf )t ] + c c m ⋅ cos[2π ( f m − Δf )t ]
b. v o (t ) =
4
4
n =0
La señal moduladora m(t), a frecuencia fm, es modulada por una señal
sinusoidal a frecuencia Δf, por lo que se produce un “efecto de batido”, como
se ilustra en la figura.
2
7.
+∞
Ac2 + ∞
A2
⋅ ∫ M (λ ) ⋅ M ( f − λ ) ⋅ dλ + c ⋅ ⎡ ∫ M (λ ) ⋅ M ( f − 2 f c − λ ) ⋅ dλ
2 −∞
4 ⎢⎣ − ∞
+∞
+ ∫ M (λ ) ⋅ M ( f + 2 f c − λ ) ⋅ dλ ⎤
⎥⎦
−∞
2
2
A E
A
b. Y (2 f c ) = Y (− 2 f c ) = c
⇒ v(t ) ≈ c ⋅ E ⋅ Δf ⋅ cos 4πf c t
4
2
8. Es una demostración, planteando el esquema completo de modulación, transmisión
y demodulación, para las señales QAM.
a. Y ( f ) =
(
)
H ( f + f c ) = H * ( f c − f ) , f < w ⇒ si h(t ) ∈ ℜ ⇒ H ( f + f c ) = H ( f − f c ) , ⎣ f ⎦ < w
9. La expresión de la envolvente natural es: a(t ) = Ac2 + m 2 (t ) + 2 Ac ⋅ m(t ) + mˆ 2 (t )
⎧ A >> m(t )
⇒ a(t ) ≈ Ac + m(t )
En caso de que: ⎨ c
⎩ Ac >> mˆ (t )
Para llegar a este resultado se han tenido en cuenta las siguientes aproximaciones
b
b
para b << 1: 1 + b ≈ 1 +
y
1− b ≈1−
2
2
10.
a. s c (t ) =
1
⋅ Am Ac ⋅ cos(2πf m t )
2
1
s s (t ) = − ⋅ Am Ac ⋅ (1 − 2a ) ⋅ sen(2πf m t )
2
2
⎤
⎡1
⎢ 2 ⋅ Am ⋅ (1 − 2a ) ⋅ sen(2πf m t ) ⎥
b. Distorsión: d (t ) = 1 + ⎢
⎥
⎢ 1 + 1 ⋅ Am ⋅ cos(2πf m t ) ⎥
⎥⎦
⎢⎣
2
c. La distorsión: d(t) es mayor cuando: a=0; mientras que esta es menor
(d(t)=1) cuando: a=1/2.
3
11.
⎧2 , i = k
a. cos(α k −1 − α i −1 ) + cos(β k −1 − β i −1 ) = ⎨
⎩0 , i ≠ k
b.
f a − f b > 2w
4
, para : i, k = 1,2,3,4 , y : α 0 = β 0 = 0
UNIVERSIDAD DE VALLADOLID
E.T.S. INGENIEROS DE TELECOMUNICACIÓN
TEORÍA DE LA COMUNICACIÓN
Tema 3: Modulaciones Angulares
Teoría de la Comunicación - Curso 2010-2011
TEMA III . Modulaciones
angulares
3 1 M d l ió de
d fase
f
d l ió de
d
3.1.-Modulación
(PM) y modulación
frecuencia (FM)
3.2.-Modulación en frecuencia de un tono simple
3.3.-Ancho de banda de señales FM
3.4.-Generación de señales FM
3.5.-Demodulación FM
3.6.-Efectos no lineales en sistemas FM
Tema III: Modulaciones Angulares
Introducción
Estudiaremos un tipo de modulación donde el ángulo de la
señal portadora se modifica siguiendo las variaciones de la
señal moduladora
Una característica muy importante de estas modulaciones
angulares es que se puede discriminar más fácilmente el
ruido y las interferencias que en modulaciones de amplitud
⇒ conlleva aumento del ancho de banda
En las modulaciones angulares hay mecanismos por los
que se puede intercambiar ancho de banda y prestaciones
frente al ruido (no en modulaciones de amplitud)
Hay 2 tipos: modulación en frecuencia (FM) y modulación
en fase (PM)
Nos centraremos en FM (la más utilizada)
Son similares y están relacionados
1
Tema III: Modulaciones Angulares
3.1.- Modulación de fase (PM) y
modulación de frecuencia (FM)
Sea θi(t) ell ángulo
S
á
l de
d una portadora,
t d
la
l cuall lleva
ll
información:
s (t ) = Ac cos[θ i (t )] ;
Ac ≡ amplitud de la portadora
Una oscilación completa sucede cuando θi(t) cambia 2π
radianes. Si θi(t) crece de forma monótona con el tiempo, la
frecuencia promedio, en el intervalo t y t + Δt:
f Δt (t ) =
θ i (t + Δt ) − θ i (t )
2πΔt
Se define la frecuencia instantánea de la señal modulada
angularmente:
f i (t ) = lim f Δt (t ) = lim
Δt → 0
Δt → 0
θ i (t + Δt ) − θ i (t ) 1 dθ i (t )
=
2πΔt
2π dt
Tema III: Modulaciones Angulares
3.1.- Modulación de fase (PM) y
modulación de frecuencia (FM)
Se puede
S
d iinterpretar s(t)
( ) como un fasor
f
rotante de
d amplitud
li d
Ac, fase θi(t) y velocidad angular dθi(t)/dt
En el caso de una portadora sin modular:
θ i (t ) = 2πf c t + φc
⇒ fasor que gira a una velocidad angular constante 2πf c ,
y donde φc es la fase para t = 0
Hay muchas formas de hacer que varíe θi(t) de acuerdo con
m(t), vamos a considerar 2 métodos: PM y FM
2
Tema III: Modulaciones Angulares
3.1.- Modulación de fase (PM) y
modulación de frecuencia (FM)
Modulación de fase (PM): el ángulo de la señal modulada
θi(t) varía de forma lineal con la señal banda base m(t)
θ i (t ) = 2πf c t + k p m(t )
2πfct: ángulo de la portadora sin modular
kp: sensibilidad en fase del modulador: si m(t) está en
Voltios, kp se da en rad/Volt
Supuesto φc = 0
Forma de la señal modulada en fase:
s (t ) = Ac cos[2πf c t + k p m(t )]
⇒ la señal moduladora aparece en el ángulo de la señal
modulada y no hay relación lineal entre ambas
Tema III: Modulaciones Angulares
3.1.- Modulación de fase (PM) y
modulación de frecuencia (FM)
Modulación de frecuencia (FM): la frecuencia instantánea de la señal
modulada fi(t) varía de forma lineal con la señal banda base m(t)
f i (t ) = f c + k f m(t )
fc: frecuencia de la portadora sin modular
kf: sensibilidad del modulador en frecuencia: si m(t) está en
Voltios, kf se da en Hz/Volt
Integrando en el tiempo y multiplicando por 2π (recordemos que
fi(t) = (1/2π)dθi(t)/d t )
t
θ i (t ) = 2πf c t + 2πk f ∫ m(t )dt
0
Señal modulada en frecuencia (ahora no hay relación lineal):
t
s (t ) = Ac cos[2πf c t + 2πk f ∫ m(t )dt ]
0
3
Tema III: Modulaciones Angulares
3.1.- Modulación de fase (PM) y
modulación de frecuencia (FM)
Diferencia de PM y FM frente a AM:
No hay regularidad respecto a cruces por cero en FM y PM
En PM y FM, la envolvente es constante e igual a la amplitud de la
portadora
Las señales PM y FM sólo se pueden distinguir cuando se conoce
m(t)
Ver diapositiva siguiente:
a) Portadora
b) Señal moduladora sinusoidal
c) Señal modulada en amplitud
d) Señal modulada en fase
e) Señal modulada en frecuencia
Tema III: Modulaciones Angulares
3.1.- Modulación de fase (PM) y
modulación de frecuencia (FM)
4
Tema III: Modulaciones Angulares
3.1.- Modulación de fase (PM) y
modulación de frecuencia (FM)
Relación entre PM y FM:
S puede
d generar una señal
ñ l FM iintegrando
t
d m(t)
(t) y modulando
d l d en
Se
fase
m(t)
Integrador
Modulador
PM
s(t)
Accos(2πfct)
Se ppuede ggenerar una señal PM derivando m(t)
( ) y modulando en
frecuencia
m(t)
Diferenciador
Modulador
FM
s(t)
Accos(2πfct)
Tema III: Modulaciones Angulares
3.1.- Modulación de fase (PM) y
modulación de frecuencia (FM)
Las propiedades para señales PM se pueden derivar directamente
de las propiedades de FM y viceversa
Nos centraremos en FM por ser la más utilizada
5
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
La señal s(t) es una función no lineal de la señal moduladora
m(t), lo que hace que la modulación en frecuencia sea un proceso
no lineal
A diferencia de AM, en FM el espectro de s(t) no está
relacionado de forma sencilla con el espectro de m(t)
En el análisis espectral consideraremos el caso más sencillo, con
que será un tono simple.
p
una señal moduladora q
Objetivo: obtener una relación empírica entre el ancho de
banda de la señal FM y el ancho de banda de la señal m(t)
Sea:
m(t ) = Am cos(2πf mt )
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
La frecuencia instantánea:
f i (t ) = f c + k f Am cos( 2πf m t ) = f c + Δf cos( 2πf m t )
La desviación en frecuencia es Δf = kf Am :
Representa la desviación máxima de la frecuencia instantánea respecto de
la portadora
No depende de la frecuencia de la portadora, sino de la amplitud de la
señal moduladora
Ell ángulo
á
l será:
á
t
θ i ( t ) = 2π ∫ f i ( t ) dt = 2π f c t +
0
Δf
sin( 2π f m t )
fm
El índice de modulación β se define como el cociente entre la
desviación en frecuencia y la frecuencia de la señal moduladora.
6
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
β =
Δf
fm
[rad]
θ i ( t ) = 2 π f c t + β sin ( 2 π f m t )
Representa la máxima desviación en fase respecto a la fase de la portadora
sin modular
Señal FM:
s ( t ) = A c cos [2π f c t + β sin ( 2π f m t ) ]
Dependiendo del valor del índice de modulación β, vamos a diferenciar
dos tipos de modulación en frecuencia:
a) FM de banda estrecha, para β pequeño ( β < 1 rad )
b) FM de banda ancha, para β elevado
Para FM de banda estrecha, el ancho de banda de s(t) es aproximadamente 2
veces el de m(t). Para FM de banda ancha, excede este valor
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
Modulación en frecuencia de banda estrecha
Expandimos la expresión de la señal FM
s (t ) = Ac cos( 2πf c t ) cos[βsin ( 2πf m t )] −
− Ac sin ( 2πf c t ) sin[βsin ( 2πf m t )]
Suponiendo β pequeño comparado con 1 radian ( β << 1 radian), se
pueden hacer las siguientes aproximaciones:
cos[βsin
i (2πf m t )] ≈ 1
sin[βsin ( 2πf m t )] ≈ βsin ( 2πf m t )
s (t ) ≈ Ac cos( 2πf c t ) − βAc sin ( 2πf c t ) sin ( 2πf m t )
Tendremos:
Esta ecuación nos da la forma aproximada de señal FM de banda
estrecha modulada por Amcos(2πfmt)
7
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
Diagrama de bloques del modulador FM de banda estrecha:
m(t)
señal
Integrador
Modulador
producto
-
Σ
s(t)
+
moduladora
Desfasador
-90º
Accos(2πfct)
portadora
modulador de fase
de banda estrecha
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
Idealmente, la señal FM:
Tiene envolvente constante
Si la señal moduladora es sinusoidal de frecuencia fm ⇒ el ángulo θ i(t) es
también sinusoidal con la misma frecuencia
El diagrama de bloques estudiado introduce distorsión:
La envolvente contiene una modulación de amplitud residual
Para una señal moduladora sinusoidal ⇒ el ángulo θ i(t) contiene
distorsión armónica de los armónicos de 3er orden y mayor orden de
la frecuencia fm
Si β ≤ 0.3 radianes ⇒ el efecto de la modulación en amplitud y la
distorsión armónica de la fase están limitados a valores despreciables
8
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
La expresión
de s(t)
p
( ) se ppuede expandir:
p
s (t ) = Ac cos( 2πf c t ) +
1
βAc {cos[2π ( f c + f m )t ] − cos[2π ( f c − f m )t ]}
2
Esta expresión es parecida a la de AM:
1
s AM (t ) = Ac cos(2πf c t ) + μAc {cos[2π ( f c + f m )t ] + cos[2π ( f c − f m )t ]}
2
La diferencia está en el signo negativo de la banda lateral inferior
⇒ la señal FM de banda estrecha tiene un ancho de banda que es
esencialmente el mismo que para AM
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
Podemos representar
p
en diagrama
g
fasorial la señal FM de banda
estrecha, utilizando el fasor de la portadora como referencia:
Suma de bandas
laterales
-fm
Portadora
Banda lateral
inferior
fm
Banda lateral
superior
La señal suma de las bandas laterales está en cuadratura respecto la
portadora
La resultante es un fasor con aproximadamente la misma amplitud que la
portadora, pero con fase diferente
9
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
La representación fasorial de AM:
fm
Portadora
Banda lateral
superior
Suma de bandas
laterales
-fm Banda lateral
inferior
La resultante está en fase con la portadora, mientras la amplitud varía
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
Modulación en frecuencia de banda ancha
Ahora determinaremos el espectro de una señal de FM modulada por
un tono simple para un valor arbitrario del índice β
Señal FM:
s (t ) = Ac cos[2πf c t + βsin ( 2πf m t ) ]
En general, esta señal no es periódica, a menos que la frecuencia
portadora fc sea un múltiplo de fm
P d
Podemos
poner s(t)
( ) (suponiendo
(
i d fc >> ancho
h bbanda
d señal
ñ l FM):
FM)
{
~
}
s ( t ) = ℜ e { Ac exp [ j 2π f c t + j β sin( 2π f m t )]} = ℜ e s ( t )exp( j 2π f c t )
~
s ( t ) = Ac exp [ j β sin( 2π f m t )] es la envolvente compleja de la señal
FM s ( t )
10
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
Ahora, la envolvente compleja de la señal FM s(t) es función periódica
del tiempo con frecuencia fundamental fm, por lo que se puede expandir
como una serie compleja de Fourier
∞
~
∑c
s (t ) =
n = −∞
n
exp( j 2 π nf m t )
Los coeficientes complejos de Fourier:
1
Recordemos : c n =
T
1
2 fm
∫
cn = f m
−
T
2 ~
n
∫ s (t ) exp( − j 2π T t ) dt
−
T
2
~
s (t ) exp( − j 2πnf m t ) dt = f m Ac
1
2 fm
1
2 fm
∫ exp [ jβ sin( 2πf
−
m
t ) − j 2πnf m t ]dt
1
2 fm
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
cambio
de variable
: x = 2π f m t ;
t =
Ac
2π
π
∫ exp [ j ( β
dx
2 πf m
1
⇒ x =π
2 fm
t = −
cn =
dx = 2 π f m dt ⇒ dt =
1
⇒ x = −π
2 fm
sin x − nx ) ]dx
−π
Esta integral no se puede evaluar directamente y se conoce con el
nombre de función de Bessel de primera clase, argumento β y orden
‘n’, se denota:
J n (β ) =
1
2π
π
∫ exp [ j ( β sinx − nx ) ]dx
−π
11
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
Por tanto:
c n = Ac J n ( β )
La serie de Fourier compleja queda:
~
s ( t ) = Ac
∞
∑
n = −∞
J n ( β ) exp( j 2 π nf m t )
Expresión s(t):
∞
⎡~
⎤
s (t ) = ℜe ⎢ s (t ) exp( j 2πf c t )⎥ = Ac ∑ J n ( β ) cos[2π ( f c + nf m )t ]
⎣
⎦
n = −∞
Esta es la representación en serie de Fourier de una señal FM modulada
por un tono a frecuencia fm para un valor arbitrario de β
Su espectro (T.F.):
S( f ) =
Ac
2
∞
∑J
n = −∞
n
( β )[δ ( f − f c − nf m ) + δ ( f + f c + nf m )]
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
Funciones de Bessel:
Jn(β)
Jo(β)
J1(β)
J2(β)
J3(β)
J4(β)
β
12
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
Tabla de las funciones de Bessel:
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
Propiedades:
Para n par: Jn(β) = J-n(β)
Para n impar: Jn(β) = -J-n(β)
Ö Jn(β) = (-1)n J-n(β)
Para pequeños valores de β
Jo (β ) ≈ 1
J1 ( β ) ≈
β
2
J n (β ) ≈ 0
n >1
Además:
∞
∑
n = −∞
J
2
n
(β ) = 1
13
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
Con estas propiedades y la forma de Jn(β) tenemos:
1.
El espectro FM consiste en una componente portadora y un número
infinito de bandas laterales colocadas de forma simétrica a frecuencias
fm, 2fm, 3fm, . . . en torno a la portadora. Esta es una diferencia importante
frente a AM, donde sólo hay 2 bandas laterales.
2.
En el caso de que β sea pequeño comparado con la unidad ⇒ sólo los
coeficientes Jo(β) y J1(β) son significativos ⇒ la señal modulada está
p
formada p
por la componente
de la pportadora y 2 bandas laterales a
frecuencias fc ± fm ⇒ caso especial de FM de banda estrecha.
3.
La amplitud de la portadora varía con β de acuerdo con Jo(β):
Diferencia respecto AM (en FM la amplitud de portadora depende del índice
de modulación)
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
Cuando la portadora se modula para generar FM,
FM la potencia de las bandas
laterales aparece a expensas de quitar potencia a la portadora, haciendo que
la amplitud de la portadora dependa del índice de modulación β
s (t ) = Ac
P=
Ac2
2
∞
∑J
n = −∞
( β ) cos[2π ( f c + nf m )t ]
∞
∑ J n2 ( β ) =
n = −∞
∞
Recuerda:
n
∑
n = −∞
J
2
n
Ac2
2
(β ) = 1
14
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
Ejemplos: vamos a estudiar qué ocurre con la señal
modulada FM para variaciones de la amplitud y la
frecuencia de la señal moduladora
Ejemplo 1: fijamos fm, variamos la amplitud de la señal moduladora
→ variamos la desviación máxima en frecuencia Δf = kf Am
Fijamos fm ⇒ β = Δf / fm para β = 1,2,5. En la diapositiva siguiente
(ejemplo 1) se muestra el espectro de la señal FM normalizada
respecto a la amplitud de la portadora
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
1.0
Δf=fm
Δf=2fm
1.0
2Δf
2Δf
β=1.0
β=2.0
2Δf
f (Hz)
f (Hz)
10
1.0
Δf=5fm
2Δf
Ejemplo 1
β=5.0
fc
fm
f (Hz)
15
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
Ejemplo 2: fijamos Am (Δf → constante) y variamos fm
125
⇒ β = 1,2,5.
Según aumentamos β con Δf fijo hay un mayor número
de deltas en el intervalo fc - Δf < | f | < fc + Δf.
Cuando β → ∞ el ancho de banda de la señal viene
limitado por 2Δf.
Tema III: Modulaciones Angulares
3.2.- Modulación en frecuencia
de un tono simple
1.0
1.0
2Δf
β=2.0
β=1.0
2Δf
f (Hz)
f (Hz)
10
1.0
2Δf
Ejemplo 2
β=5.0
fc
fm
f (Hz)
16
Tema III: Modulaciones Angulares
3.3.- Ancho de banda de
señales FM
En teoría, la señal FM tiene un número infinito de bandas laterales, con
lo que el ancho de banda absoluto es infinito
En la práctica, se puede considerar un número finito de bandas laterales
compatible con una cantidad fijada de distorsión, así pues, hablaremos
de un ancho de banda efectivo de transmisión (BT)
Consideremos una señal FM modulada por un tono fm: las bandas
laterales están separadas por fm
Aquellas bandas laterales por encima de Δf decrecen rápidamente a cero.
Entonces:
Ancho de banda algo mayor que 2Δf
Si β → ∞ ⇒ ancho de banda próximo a 2Δf
Si β → 0 (FM banda estrecha) ⇒ ancho de banda determinado por 2fm
Por ello, la regla práctica para el cálculo del ancho de banda es:
B T ≈ 2 Δ f + 2 f m = 2 Δ f (1 +
1
β
) ≡ REGLA
DE CARSON
Tema III: Modulaciones Angulares
3.3.- Ancho de banda de
señales FM
Una definición más precisa de BT: aquel ancho de banda que contiene
el máximo número significativo de bandas laterales cuya amplitud sea
mayor de un valor dado. Un valor conveniente suele ser el 1% de la
amplitud de la portadora sin modular
Se define el ancho de banda del 1% (ancho de banda de Tx de la señal
FM) como la separación entre las 2 frecuencias fuera de las cuales
ninguna banda lateral tiene una amplitud mayor que el 1% de la
amplitud de la portadora sin modular
BT = 2 n max f m =
2 n max Δ f
β
f m : frecuencia señal moduladora
n max : máximo valor que satisface J n ( β ) > 0 . 01
17
Tema III: Modulaciones Angulares
3.3.- Ancho de banda de
señales FM
El valor nmax depende del índice de modulación β y se puede
determinar a ppartir de ggráficos de Bessel:
El BT puede calcularse utilizando este procedimiento de forma general, y
normalizado respecto a Δf y dibujado respecto a β
B T
Δ f
=
2 n
β
max
Tema III: Modulaciones Angulares
3.3.- Ancho de banda de
señales FM
Se obtiene una curva universal interpolando valores de la tabla
anterior:
Para β >> ⇒ BT/Δf ≅ 2 ⇒ BT ≅ 2Δf
18
Tema III: Modulaciones Angulares
3.3.- Ancho de banda de
señales FM
Consideremos m(t) arbitrario, con ancho de banda ω
d estimar
i
id
d un tono para ell peor caso.
El BT se puede
considerando
Primero se determina la relación de desviación (D):
La relación de desviación D es el cociente entre la desviación en frecuencia
(Δf) y su máxima componente frecuencial (ω)
D=
Δf
ω
;
Δf = k f Amax
Este factor D juega el mismo papel para una modulación no sinusoidal que el
índice de modulación β para modulación sinusoidal
Cambiando β por D y fm por ω en la regla de Carson o ancho de banda del
1%, se determina el ancho de banda de las señales FM
NOTA: la regla de Carson estima por debajo el ancho de banda,
mientras que la del 1% da un valor mayor ⇒ en la práctica se usa un
valor comprendido entre ambos (valor medio)
Tema III: Modulaciones Angulares
3.3.- Ancho de banda de
señales FM
Ejemplo: en Norteamérica se fija Δf = 75 KHz para difusión de FM
comercial y ω = 15 KHz la máxima frecuencia de audio de interés en
comercial,
transmisiones FM; por ello:
Relación de desviación D = 75/15 = 5
Regla de Carson: BT = 2(75 + 15) = 180 KHz
Regla del 1%: BT = 2nmaxfm = 2nmax ω = 16*15 = 240 KHz
(como D = 5 ⇒ 2nmax = 16)
Por ejemplo: BT = (180+240)/2 = 210 KHz
19
Tema III: Modulaciones Angulares
3.4.- Generación de señales FM
Hay 2 métodos para generar señales moduladas en frecuencia: FM
directo y FM indirecto
En el método FM indirecto se emplea modulación FM de banda
estrecha y multiplicación de frecuencia para incrementar el nivel de
desviación de frecuencia hasta el valor deseado
En el método FM directo la portadora varía directamente su frecuencia
de acuerdo a la señal de entrada banda base (moduladora), esto es, la
frecuencia instantánea de la portadora se varía de forma directa con la
variación temporal de la señal banda base
⇒ se utiliza un dispositivo oscilador controlado por tensión: VCO (Voltage
Controller Oscilator)
m(t)
VCO
s(t) SEÑAL FM
Tema III: Modulaciones Angulares
3.4.- Generación de señales FM
Método FM indirecto
Diagrama de bloques:
m(t)
Integrador
Señal
moduladora
banda base
Modulador de fase s1(t) Multiplicador
banda estrecha
de frecuencia
s(t)
Señal
FM
Oscilador de
cristal controlado f1
La señal banda base se integra y se emplea para el modulador de
fase un oscilador de cristal controlado que da estabilidad en
frecuencia
Para minimizar la distorsión de fase inherente en el modulador el
valor de β debe mantenerse pequeño (β ≤ 0.3)
Se utiliza un multiplicador de frecuencia para dar lugar a la señal
FM de banda ancha
20
Tema III: Modulaciones Angulares
3.4.- Generación de señales FM
Salida del modulador de fase de banda estrecha:
t
s1 (t ) = A1 cos ⎡2πf1t + 2πk f ∫ m(t )dt
d⎤
⎢⎣
⎥⎦
0
f1 : frecuencia del cristal controlado
k f : constante (sensibili dad en fase del modulador)
Si la señal moduladora es sinusoidal: m(t) = Amcos(2πfmt)
s1 ( t ) = A1 cos [2π f 1t + β 1 sin( 2π f m t ) ]
β 1 < 0 . 3 rad ⇒ evitar la distorsión
La salida del modulador de fase es multiplicada en frecuencia por n
veces con el “multiplicador de frecuencia” para dar lugar a la señal FM
de banda ancha
t
s (t ) = Ac cos ⎡2πnf1t + 2πk f n ∫ m(t )dt ⎤
⎢⎣
⎥⎦
0
Tema III: Modulaciones Angulares
3.4.- Generación de señales FM
Si m(t) es sinusoidal:
s (t ) = Ac cos[2πf c t + βsin
i (2πf mt )]
donde β = nβ1 ; f c = nf1
Por ello, eligiendo de forma apropiada el valor n se obtiene el índice de
modulación deseado β y frecuencia fc
Problema: ajustamos fc y β con un único parámetro n ⇒ hay un único
grado de libertad
⇒Solución: usamos 2 multiplicadores de frecuencia
(ver diapositiva siguiente)
21
Tema III: Modulaciones Angulares
3.4.- Generación de señales FM
m(t)
Integrador
Señal
moduladora
banda base
n1β1, n1f1
Modulador de fase β1,
banda estrecha f1
Accos(2πf1t)
Multiplicador
p
de frecuencia
x n1
Oscilador de
cristal controlado
n1β1, f2-n1f1 Multiplicador
Mezclador
de frecuencia
x n2
Ac’cos(2πf2t)
Oscilador de
cristal controlado
Señal
FM
Banda
Ancha
β, fc
β = n 1 n 2 β1
fc = n2(f2-n1f1)
Tema III: Modulaciones Angulares
3.5.- Demodulación de FM
La demodulación en frecuencia es el pproceso qque ppermite recuperar
la
p
señal moduladora de la señal FM
La salida del demodulador FM será una señal proporcional a la
frecuencia instantánea de la señal de entrada
Hay 2 esquemas básicos de demodulación:
Discriminador de frecuencia
Bucle enganchado en fase (PLL)
22
Tema III: Modulaciones Angulares
3.5.- Demodulación de FM
Discriminador de frecuencia
Idealmente es un derivador seguido de un detector de envolvente
Consiste en un circuito pendiente seguido de un detector de envolvente
El circuito pendiente se caracteriza por una función de transferencia que es
imaginaria pura (simetría impar) y varía de forma lineal dentro del
intervalo de frecuencias dado:
H1(f)/j
-fc-BT/2
-fc+BT/2
f (Hz)
fc-BT/2
fc+BT/2
Tema III: Modulaciones Angulares
3.5.- Demodulación de FM
Función de transferencia:
⎧
BT
⎛
⎪ j 2π a ⎜ f − f c + 2
⎝
⎪
⎪
B
⎛
H 1 ( f ) = ⎨ j 2π a ⎜ f + f c − T
2
⎝
⎪
⎪0
⎪
⎩
a : constante
⎞
⎟
⎠
⎞
⎟
⎠
fc −
BT
B
< f < fc + T
2
2
-f c −
BT
B
< f < − fc + T
2
2
resto
Evaluemos la salida de este sistema con entrada señal FM centrada en fc y
ancho de banda BT
Suponemos que el espectro de s(t) es cero fuera del intervalo
fc - BT/2 < | f | < fc + BT/2
~
~
Es conveniente utilizar la representación paso bajo equivalente: H 1 ( f ) , s (t )
~
H 1 ( f ) :función de transferencia del filtro paso bajo equivalente del circuito
pendiente H1(f)
23
Tema III: Modulaciones Angulares
3.5.- Demodulación de FM
~
Pendiente:4πa
H 1( f ) / j
f (Hz)
-BT/2
BT/2
~
H 1( f − fc ) = 2 H1( f )
⎧
BT ⎞
⎛
~
⎟
⎪ j 4π a ⎜ f +
H 1( f ) = ⎨
2 ⎠
⎝
⎪0
⎩
BT
B
< f < T
2
2
resto
−
Tema III: Modulaciones Angulares
3.5.- Demodulación de FM
Señal FM de entrada:
s ( t ) = Ac cos ⎡ 2π f c t + 2π k f
⎢⎣
∫
t
0
m ( t ) dt ⎤
⎥⎦
Envolvente compleja:
~
~
Si
s ( t ) = Ac exp ⎡ j 2π k f
⎢⎣
∫
t
0
m ( t ) dt ⎤
⎥⎦
s1 (t ) es la envolvente compleja de la respuesta del circuito pendiente:
⎧
BT ⎞ ~
B
B
⎛
~
− T < f < T
⎟ S( f )
1 ~
⎪ j 2π a ⎜ f +
S1( f ) = H 1( f ) S ( f ) = ⎨
2 ⎠
2
2
⎝
2
⎪0
resto
⎩
~
Entonces s1 (t ) : (aplicamos la propiedad de la T. F. que nos dice que
multiplicar en frecuencia por j2πf equivale a derivar en el dominio del
~
tiempo):
24
Tema III: Modulaciones Angulares
3.5.- Demodulación de FM
⎡ ~
⎤
~
~
d s (t )
+ jπ BT s (t ) ⎥
s 1 (t ) = a ⎢
⎢ dt
⎥
⎣
⎦
~
⎡
2 k f m (t ) ⎤
⎡
s 1 ( t ) = j π B T aA c ⎢1 +
⎥ exp ⎢ j 2π k f
B
T
⎦
⎣
⎣
La señal paso banda de salida del circuito pendiente:
⎡~
⎤
s 1 ( t ) = ℜ e ⎢ s 1 ( t ) exp( j 2 π f c t ) ⎥
⎣
⎦
⎤
t
∫ m ( t ) dt ⎥⎦
0
se deduce por cos(a+π/2)=-sina
2 k f m (t ) ⎤
⎡
s 1 ( t ) = π B T aA c ⎢1 +
⎥ cos
BT
⎣
⎦
⎡
⎢ 2π f c t + 2π k f
⎣
t
∫ m ( t ) dt
+
0
π ⎤
⎥
2⎦
La señal s1(t) presenta una modulación híbrida: la amplitud y frecuencia de la
señal portadora varía de acuerdo con m(t)
Podemos utilizar un detector de envolvente para demodular la señal, para ello:
2k f
BT
m(t ) < 1 ∀t ⇒ evitar sobremodulación
Tema III: Modulaciones Angulares
3.5.- Demodulación de FM
La salida del detector de envolvente:
~
⎡ 2k
⎤
s1 (t ) = πBT aAc ⎢1 + f m(t )⎥
BT
⎣
⎦
→ tenemos la señal moduladora salvo un término de continua
El término de continua es proporcional a la pendiente de la función de
transferencia del circuito
La componente de continua se puede eliminar restando a la salida del
detector de envolvente la salida de un segundo detector de envolvente
precedido de un circuito pendiente complementario con función de
transferencia H2( f )
H2(f)/j
-fc-BT/2
Pendiente:-2πa
f (Hz)
-fc+BT/2
fc-BT/2
fc+BT/2
25
Tema III: Modulaciones Angulares
3.5.- Demodulación de FM
Las funciones de transferencia complejas están relacionadas por:
~
~
H 2 ( f ) = H 1 (− f )
Si s2(t) es la respuesta del segundo circuito pendiente, cuya entrada es la señal
FM s(t), la envolvente compleja de s2(t):
~
⎡ 2k
⎤
s 2 (t ) = πBT aAc ⎢1 − f m(t )⎥
BT
⎣
⎦
La diferencia de las envolventes:
~
~
s o ( t ) = s 1 ( t ) − s 2 ( t ) = 4π k f aA c m ( t )
N tiene
No
i
componente
continua
i
El discriminador de frecuencia serían dos circuitos pendiente complementarios
seguidos de detector de envolvente y un sumador ⇒ discriminador de
frecuencia balanceado (ver diapositiva siguiente)
Tema III: Modulaciones Angulares
3.5.- Demodulación de FM
Diagrama de bloques: discriminador de frecuencias balanceado
Señal
FM
Circuito
pendiente
H1 ( f )
Detector
de envolvente
+
Σ
Circuito
pendiente
di t
H2( f )
-
Señal
banda
base
Detector
de envolvente
26
Tema III: Modulaciones Angulares
3.6.- Efectos no lineales en
sistemas FM
Supongamos un sistema de comunicación cuya función de transferencia
está definida por la relación no lineal:
vo (t ) = a1vi (t ) + a2 vi2 (t ) + a3vi3 (t )
vi (t ) : señal de entrada
vo (t ) : señal de salida
a1,a2 ,a3 : constantes
Se supone que el sistema no tiene memoria ⇒ vo(t) es una función
instantánea de vi(t)
Deseamos determinar el efecto de transmitir la señal FM a través de
este canal: vi(t) → señal FM
v i ( t ) = A c cos [2 π f c t + φ ( t ) ]
φ ( t ) = 2π k f
t
∫ m ( t ) dt
o
Tema III: Modulaciones Angulares
3.6.- Efectos no lineales en
sistemas FM
v o ( t ) = a1 Ac cos [2π f c t + φ ( t ) ] + a 2 Ac2 cos 2 [2π f c t + φ ( t ) ] +
+ a 3 Ac3 cos 3 [2π f c t + φ ( t ) ]
Expandiendo y tomando factor común:
vo (t ) = a1 Ac cos[2πf c t + φ (t )] +
a2 Ac2
[1 + cos(4πf ct + 2φ (t ))] +
2
a3 Ac3
{cos[2πf ct + φ (t )]⋅ [1 + cos((4πf ct + 2φ (t ))]}
2
a A2
a A3
vo (t ) = 2 c + (a1 Ac + 3 c ) cos[2πf c t + φ (t )] +
2
2
2
a A
a A3
+ 2 c cos[4πf ct + 2φ (t )] + 3 c {cos[6πf c t + 3φ (t )] + cos[2πf ct + φ (t )]}
2
4
+
27
Tema III: Modulaciones Angulares
3.6.- Efectos no lineales en
sistemas FM
a 2 A c2
3
+ ( a 1 A c + a 3 A c3 ) cos [2 π f c t + φ ( t ) ] +
2
4
1
a A3
2
+ a 2 A c cos[ 4 π f c t + 2 φ ( t )] + 3 c cos [6 π f c t + 3φ ( t ) ]
2
4
v o (t ) =
La salida tiene una componente continua y 3 componentes moduladas
en frecuencia con portadoras fc, 2fc, 3fc
Para poder extraer la señal FM de la señal de salida vo(t) es necesario
separar la señal FM a frecuencia fc de la señal FM a frecuencia más
próxima
Si Δf es la desviación en frecuencia de vi(t), y ω el ancho de banda de la
señal moduladora m(t); aplicando la regla de Carson (BT ≅ 2Δf + 2fm =
2Δf + 2ω) y teniendo en cuenta que la desviación en frecuencia de la
señal FM a frecuencia 2fc es 2Δf, la condición necesaria para separarlas
es:
Tema III: Modulaciones Angulares
3.6.- Efectos no lineales en
sistemas FM
BT
B'
< 2 fc − T
2
2
fc + Δf + ω < 2 fc − (2Δf + ω )
fc +
⇒ f c > 3 Δ f + 2ω
|Vo(f)|
BT
fc
fc+Δf+ω
2fc-2Δf-ω
BT’
2fc
BT’’
3fc
f (Hz)
28
Tema III: Modulaciones Angulares
3.6.- Efectos no lineales en
sistemas FM
Utilizando un filtro paso banda centrado en fc , y ancho de banda
2Δf + 2ω , la señal de salida es:
v o' ( t ) = ( a 1 A c +
3
a 3 A c3 ) cos [2 π f c t + φ ( t ) ]
4
Conclusiones:
El único efecto de pasar una señal FM a través de un canal con nolinealidades en amplitud, si filtramos de un modo adecuado, es
simplemente modificar la amplitud
A diferencia
dif
i de
d lo
l que ocurre con AM, la
l señall FM no se ve afectada
f
d
por la distorsión debida a no-linealidades de la amplitud del canal
Esta es la razón por la que FM se utiliza de forma amplia
en enlaces de microondas y satélites, debido a que permite
el uso de amplificadores de potencia altamente no lineales
Tema III: Modulaciones Angulares
3.6.- Efectos no lineales en
sistemas FM
Sin embargo, FM es muy sensible a no-linealidades de fase, y un tipo
muy común de no-linealidad
no linealidad de fase en los enlaces de microondas es la
denominada conversión AM→PM. Esto es debido a que las
características de fase de los amplificadores y repetidores empleados en
los sistemas depende de la amplitud instantánea de la señal de entrada
En la práctica, esta conversión AM→PM se caracteriza por una
constante K medida en [grados/dB], y debe interpretarse como el
cambio de fase de pico a la salida para un cambio de 1dB en la
envolvente de entrada
Cuando la señal FM se transmite a través de un enlace de radio, recoge
variaciones aleatorias en amplitud debido al ruido e interferencias
durante su propagación, y cuando dicha señal se pasa por un repetidor
con conversión AM→PM, la salida tendrá modulación no deseada de
fase dando lugar a la distorsión
⇒ En los repetidores FM, es muy importante mantener la conversión
AM→PM a un nivel bajo, típicamente, K < 2 grados / dB
29
TEORÍA DE LA COMUNICACIÓN
CUESTIONES TEMA 3
MODULACIONES ANGULARES
1.- Definición de fase y frecuencia instantánea. ¿Cómo están relacionadas?. ¿Cuál es la fase
y la frecuencia instantánea para PM y FM?
2.- ¿Cuál es la expresión de una señal FM y de una señal PM?. ¿Se pueden distinguir a
simple vista en un osciloscopio?. ¿Se pueden distinguir de una señal AM?
3.- ¿Cómo se puede generar una señal FM con un modulador de PM y al revés?
4.- ¿Cuál es la definición de desviación en frecuencia e índice de modulación cuando la
moduladora es sinusoidal?. Poner la expresión en ese caso de la señal modulada FM
utilizando ambos parámetros por separado.
5.- ¿Cómo se diferencia FM de banda ancha y FM de banda estrecha?. ¿Cuál es la expresión
aproximada para FM de banda estrecha?
6.- ¿Cómo se puede generar FM de banda estrecha?
7.- Hacer un diagrama fasorial de AM y otro de FM de banda estrecha. ¿Cuál es la
diferencia fundamental?
8.- ¿Cuál es el procedimiento para obtener el espectro de una señal FM de banda ancha
puesto que al no ser periódica no se puede calcular directamente la serie de Fourier?
9.- ¿Cuál es la expresión del espectro de una señal FM?. ¿Por qué tipo de funciones viene
determinada la altura relativa de las deltas?
10.- ¿Cuál es la relación entre la potencia de la señal modulada y la de la portadora?. ¿Varía
la amplitud de componente a la frecuencia portadora de la señal modulada con el índice de
modulación?
11.- ¿Cuál es la separación entre las deltas en el espectro de una señal FM?
12.- ¿Cuál es el ancho de banda absoluto de una señal FM?
13.- ¿Cuales son las dos reglas para la determinación del ancho de banda de forma
aproximada en el caso de que la señal moduladora sea sinusoidal?. ¿Cuál de las dos reglas
da un ancho de banda menor del utilizado en la práctica y cuál uno mayor?
14.- En el caso de tener una señal moduladora arbitraria con ancho de banda W, ¿cómo se
define la relación de desviación D?. ¿Cuáles son ahora las dos reglas para la determinación
del ancho de banda?
15.- Explicar el método de generación de FM indirecto.
16.- Explicar el esquema del discriminador de frecuencias para demodular la señal FM.
17.- Explicar el diagrama de bloques completo del discriminador de frecuencias balanceado.
18.- Explicar los efectos no lineales en FM. ¿Cómo se recupera la señal FM original tras el
sistema no lineal?
19.- ¿En qué consiste la conversión AM a PM en sistemas FM?. ¿Por qué no es deseable y
cómo es posible evitarla?
TEORÍA DE LA COMUNICACIÓN
PROBLEMAS TEMA 3
MODULACIONES ANGULARES
1.- Sea una señal sinusoidal moduladora:
m(t) = Am cos (2πfmt)
que se aplica a un modulador de fase con sensibilidad de fase kp. La señal portadora tiene
amplitud Ac y frecuencia fc.
a) Determinar el espectro de la señal resultante modulada en fase, suponiendo que el
máximo valor de la desviación de fase β p = kpAm no excede 0.3 radianes.
b) Construir un diagrama fasorial para esta señal modulada en fase y compáralo con el
correspondiente a una señal FM de banda estrecha.
2.- Una señal FM con índice de modulación β = 1 se transmite a través de un filtro paso
banda ideal con frecuencia central fc y ancho de banda 5fm, donde fc es la frecuencia de la
señal portadora y fm es la frecuencia de la señal moduladora que es sinusoidal. Determinar
la amplitud del espectro a la salida de dicho filtro.
3.- Considerar la señal moduladora cuadrada de la siguiente figura:
m(t)
+1
0
t
-1
T0/2
T0/2
que se utiliza para modular una señal portadora Ac cos (2πfct). Suponer que la
sensibilidad en frecuencia es kf Hz por Voltio.
a) Determinar la forma de la señal que define la frecuencia instantánea de la señal FM
resultante.
b) Determinar la forma de la señal que define la fase instantánea de la señal FM
resultante.
c) Evaluar la envolvente compleja de la señal FM. Mostrar entonces que la señal FM se
puede expandir como sigue:
∞
s(t)= A c
∑α
n= −∞
n
2 nπ t
cos 2π f c t +
T0
donde:
α n=
1
β- n
β + n
n
sinc
+ ( −1 ) sinc
2
2
2
β = k f T0
siendo T0 el período de la señal cuadrada.
4.- Determinar el espectro de la siguiente señal FM multitono y explicar las diferentes
componentes que forman dicho espectro:
s(t) = Accos[2πfct + β 1sin(2πf1t) + β 2sin(2πf2t)]
5.- Una señal portadora de frecuencia 100 MHz es modulada en frecuencia por una señal
moduladora sinusoidal de amplitud 20 Volts. y frecuencia 100 KHz. La sensibilidad en
frecuencia del modulador es 25 KHz por voltio.
a) Determinar el ancho de banda aproximado de la señal FM resultante utilizando la regla
de Carson.
b) Determinar el ancho de banda en el caso de que se transmitan únicamente aquellas
componentes que excedan el 1 % de la amplitud de la portadora sin modular. Utilizar la
curva universal.
c) Repetir los cálculos suponiendo que la amplitud de la señal moduladora es el doble.
d) Repetir los cálculos suponiendo que la frecuencia de la señal moduladora es el doble.
6.- El diagrama de bloques siguiente representa el sistema FM transmisor de una señal de
audio estereofónica:
l(t)
+
Modulador
Producto
∑
_
Doblador de
frecuencia
+
r(t)
+
∑
Fuente de
portadora
m(t) Modulador en
frecuencia
+
Señal FM
estereofónica
+
+
∑
Las señales de entrada l(t) y r(t) representan las señales procedentes del canal izquierdo y
del canal derecho, respectivamente. Esas señales se han sumado y restado para obtener
l(t) + r(t) y l(t) - r(t). La señal diferencia se utiliza para generar una señal DSBSC con
frecuencia central 38 KHz. La señal portadora necesaria se obtiene utilizando una fuente
de portadora a 19 KHz y un sistema que dobla la frecuencia. La señal DSBSC, la señal
l(r) + r(t) y el piloto de 19 KHz se suman para obtener la señal m(t). El piloto de 19 KHz
se transmite por razones de sincronismo. La señal moduladora m(t) se utiliza para
modular en frecuencia una señal a la frecuencia fc, resultando una señal FM que es la que
se transmite.
a) Dibujar la amplitud del espectro de la señal compuesta m(t), suponiendo que la
amplitud del espectro de las señales l(t) y r(t) es el siguiente:
|L(f)|
f1
|R(f)|
f2
f
f1
f2
donde f1 = 40 Hz y f2 = 15 KHz.
b) Suponiendo que la desviación en frecuencia es de 75 KHz, determina el ancho de
banda de transmisión de la señal.
c) Desarrolla un diagrama de bloques en el receptor para recuperar los canales izquierdo y
derecho de la señal FM.
d) Determinar cual es la señal de salida en el caso de que el receptor sea monofónico.
f
7.- Una señal FM se aplica a un dispositivo con ley cuadrática cuya tensión de salida v2(t)
está relacionada con la tensión de entrada v1(t) por la expresión:
v 2 (t) = a v 21 ( t)
donde a es una constante. Explicar cómo este dispositivo puede ser utilizado para obtener
una señal FM con una desviación de frecuencia mayor que la de la señal FM de entrada.
8.- Considerar el esquema demodulador de FM mostrado en la siguiente figura:
Señal
FM
Linea de
retardo
_
Detector de
envolvente
∑
Señal de
salida
+
en el cual la señal FM de entrada s(t) se pasa a través de un bloque que introduce un
retardo de modo que a la frecuencia portadora el desfase sea de π/2 radianes. La salida
del bloque que introduce el retardo se resta de la señal FM original, y la señal resultante
se pasa a través de un detector de envolvente. Este demodulador tiene aplicación en la
demodulación de señales FM para microondas. Supóngase que la expresión de la señal
modulada es:
s(t) = Ac cos[2πfct + β sin(2πfmt)]
Analizar el funcionamiento de este demodulador cuando el índice de modulación β es
menor que la unidad y el retardo T introducido por la línea de retardo es suficientemente
pequeño para justificar las aproximaciones:
y
cos(2πfmT) ≈ 1
sin(2πfmT) ≈ 2πfmT
9.- Supongamos que la señal recibida en un sistema FM contiene una modulación de
amplitud residual dada por la amplitud positiva a(t), de modo que:
s(t) = a(t) cos[2πfct + φ(t)]
donde fc es la frecuencia portadora. La fase φ(t) está relacionada con la señal moduladora
m(t) de la forma:
t
φ (t) = 2 π k f ∫ m ( t )dt
0
donde kf es una constante. Supongamos que la señal s(t) está restringida a la banda de
frecuencias centrada en fc y de ancho de banda BT, donde BT es el ancho de banda de
transmisión de la señal FM en ausencia de modulación de amplitud. Suponer también que
la variación de a(t) es lenta comparada con φ(t). Mostrar que la salida de un discriminador
de frecuencia ideal cuya entrada es s(t) es proporcional a a(t)m(t).
10.- Si la señal s(t) del problema anterior se aplica a un limitador, cuya señal de salida z(t)
está relacionada con la entrada por:
+1
z(t) = sgn[s(t)]=
− 1
para s(t) > 0
para s(t)< 0
a) Mostrar que la señal de salida del limitador puede expresarse como una serie de
Fourier:
z(t) =
4 ∞ ( −1 )n
cos[2 π f c t(2n + 1) + (2n + 1)φ (t)]
∑
π n=0 2 n + 1
b) Suponer que la señal de salida del limitador se aplica a un filtro paso banda cuya
amplitud en la banda de paso es unidad, con ancho de banda BT y centrada en la
frecuencia portadora fc, donde BT es el ancho de banda de transmisión de la señal FM en
ausencia de modulación de amplitud. Suponiendo que fc es mucho mayor que BT, mostrar
que la señal de salida resultante tras el filtro es:
4
y(t)= cos[2 π f ct + φ (t)]
π
Comparar esta señal con s(t) a la hora de demodular la señal y comentar la utilidad del
limitador en este caso.
TEORÍA DE LA COMUNICACIÓN
SOLUCIONES DE LOS PROBLEMAS TEMA 3
MODULACIONES ANGULARES
1.
1
1
Ac [δ ( f − f c ) + δ ( f + f c )] −
β p Ac [δ ( f − f c − f m ) − δ ( f + f c + f m )] −
2
4j
1
−
β p Ac [δ ( f − f c + f m ) − δ ( f + f c − f m )]
4j
b. ⇒ Diferencia de fases
a.
S( f ) ≈
a.
f i (t ) = f c + k f ⋅ m (t )
2.
3.
1
b. ϑi (t ) = 2πf c t + φ (t )
φ (t ) = 2πk f ⋅ ∫ m(t ) ⋅ dt
t
0
c. Es una demostración.
∞
∞
A
4. S ( f ) = c ⋅ ∑ ∑ J m (β 1 ) ⋅ J n (β 2 ) ⋅ [δ ( f − f c − mf1 − nf 2 ) + δ ( f + f c + mf 1 + nf 2 )]
2 m= −∞ n= −∞
Se pueden distinguir cuatro componentes:
i. Portadora a frecuencia f c, de amplitud: J0 (β 1 )⋅J0 (β 2 )
ii. Conjunto de bandas laterales a frecuencia: f c±m⋅f 1 (m=1,2,3,…), y
amplitud: Jm (β 1 )⋅J0 (β2 )
2
iii. Conjunto de bandas laterales a frecuencia: f c±n⋅f 2 (n=1,2,3,…), y amplitud:
J0 (β1 )⋅Jn (β2 )
iv. Términos de modulación cruzada a frecuencia: f c±m⋅f 1 ±n⋅f 2 (m=1,2,3,…;
n=1,2,3,…), y amplitud: Jm (β1 )⋅Jn (β2 )
5.
a. BT
CARSON
= 1.2 MHz
b. BT
CARSON
= 1.6 MHz
c. BT
CARSON
= 2.2 MHz
BT
1%
d. BT
BT
6.
= 2 .8 MHz
CARSON
1%
= 1.4 MHz
= 2 MHz
a.
b.
c.
= 256 KHz
⇒ BT
= 375 KHz
BT
CARSON
BT
1%
MEDIA
≈ 315 KHz
d.
3
7.
t
v1 (t ) = Ac ⋅ cos 2πf 1t + 2πk f1 ∫ m(t ) ⋅ dt
0
t
a
v 0 (t ) = ⋅ Ac2 ⋅ cos 2π (2 f 1 )t + 2π (2k f1 )∫ m (t ) ⋅ dt
0
2
8. Salida del detector de envolvente:
a (t ) ≈ 2 ⋅ Ac ⋅ [1 + π ⋅ ∆f ⋅ T ⋅ cos(2πf m t )]
9. Salida del detector de envolvente del discriminador de frecuencias ideal:
s 0 (t ) ≈ 2 ⋅ π ⋅ k f ⋅ a(t ) ⋅ m(t )
10.
a. Es una demostración.
4
⋅ cos(2πf c t + φ (t ))
π
⇒Utilizando el limitador seguido del filtro paso banda, se elimina el efecto
de la variación de amplitud en la señal modulada.
b. Término k=0, con: f c>>BT : y (t ) =
4
UNIVERSIDAD DE VALLADOLID
E.T.S. INGENIEROS DE TELECOMUNICACIÓN
TEORÍA DE LA COMUNICACIÓN
Tema 4: Ruido en modulaciones
analógicas
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
Tema 4: Ruido en modulaciones analógicas.
4.1.- Introducción: SNR y FOM.
Se necesita una medida útil para medir la calidad de una señal en el receptor,
para ello se usa la relación señal a ruido de salida:
SNRo =
Potencia media de la señal demodulada a la salida del receptor
Potencia media de ruido a la salida del receptor
Es una medida intuitiva para describir la calidad para el proceso de
demodulación en el receptor en presencia de ruido.
Vamos a suponer que la señal de información recuperada y el ruido deben
aparecer aditivamente a la salida del demodulador:
•
•
Condición válida cuando se emplea recepción con detección coherente.
En caso de usar detección de envolvente, ésta condición es aproximada, siempre
y cuando el nivel de ruido sea pequeño comparado con el de la señal.
Además, el valor de la SNRo depende de varios factores:
•
•
Del tipo de modulación empleada en el transmisor.
Del tipo de demodulación empleada en el receptor.
Sería interesante comparar la SNRo para diferentes esquemas de modulación y
demodulación, pero para que sea válido se debería cumplir:
•
•
La señal modulada: s(t), transmitida por cada sistema, tiene que tener la misma
potencia media.
El ruido del receptor: ω(t), tiene que tener la misma potencia media, medida en
el ancho de banda w de la señal de información.
Se define así la SNR para el canal, como:
SNRc =
Potencia media de la señal modulada a la entrada del receptor
Potencia media de ruido del canal en la banda de la señal de información
Para comparar diferentes esquemas de modulación y demodulación, vamos a
normalizar la SNRo por la SNRc. Así se define la FOM (Figure Of Merit), como:
FOM =
1
SNRo
SNRc
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
Otros parámetros de calidad que también se estiman en los sistemas de
comunicación son los siguientes:
SNRi =
Potencia media de la señal modulada a la entrada del receptor
Potencia media de ruido en la banda de la señal modulada a la entrada del receptor
La relación:
SNRo
SNRi
Y la relación portadora a ruido:
CNR =
Potencia media de la portadora
Potencia media de ruido en la banda de la señal modulada
4.2.- Ruido en modulaciones de amplitud.
Vamos a ver un caso de estudio común en los sistemas de comunicación:
•
•
Analizaremos los efectos del ruido en el funcionamiento del receptor.
Compararemos el comportamiento de los diferentes esquemas de modulación y
demodulación frente al ruido:
o Hay que definir criterios objetivos que describan cómo se comportan
estos sistemas frente al ruido.
o En modulaciones analógicas se va a estimar la SNRo y FOM.
Vamos a suponer que tenemos a la entrada del receptor un ruido aditivo, blanco,
gaussiano (AWGN), y de media nula. En concreto estudiaremos las modulaciones:
•
•
DSB-SC con detección coherente.
AM con detección de envolvente.
4.2.1.- Receptor de amplitud. Modelo funcional.
Los receptores de AM se denominan superheterodinos, y su esquema general se
representa en la siguiente figura:
Señal AM
+
Ruido
Sección de
radiofrecuencia
(RF)
Sección de
frecuencia
intermedia (IF)
Mezclador
Demodulador
Oscilador local
Figura 1. Esquema funcional de un receptor de amplitud.
2
Señal a la
salida
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
La señal captada por las antenas se amplificaría en la sección de radiofrecuencia
(RF), donde además se realiza un primer filtrado paso banda. Esta estaría sintonizada a
la frecuencia de portadora (fc). A continuación el conversor de frecuencia convertiría la
frecuencia de entrada, cuyo valor es variable, a una frecuencia intermedia (fIF) fija y
menor.
f IF = f RF − f LO
La sección de frecuencia intermedia (IF) amplificaría la señal a su entrada, en un
entorno de fIF, y filtraría en función del tipo de modulación de amplitud. Es de notar que
este bloque es el que da la mayor parte de la ganancia y la selectividad del sistema. Por
último, el demodulador recuperaría la señal de información original m(t).
El esquema simplificado del receptor de amplitud para el análisis de ruido es el
siguiente:
s(t)
+
Σ
+
BPF
equivalente
h(t)
x(t)
Demodulador
y(t)
ω(t)
Figura 2. Modelo de receptor de amplitud para análisis de ruido.
Inicialmente la señal modulada s(t) se sumaría con ω(t), que es ruido blanco,
aditivo, gaussiano (AWGN), de media cero, y densidad espectral de potencia:
Sω(f)=No/2. Después pasaría por un filtro paso banda equivalente, cuya respuesta es h(t),
que representa las secciones de RF e IF en cascada del modelo funcional. En el caso de
modulaciones AM y DSB-SC, su respuesta normalizada en frecuencia se muestra en la
Figura 3, donde: fc = fIF (frecuencia portadora a la salida del mezclador), y BT es el
ancho de banda de la señal transmitida.
|H(f)|
BT
1
f
-fc
fc
Figura 3. Respuesta normalizada del filtro paso banda equivalente para AM y DSB-SC.
Sea x(t) la señal a la salida del filtro h(t), la cual se podrá descomponer en dos
términos: uno referente a la señal modulada [s(t)], y otro relacionado con el ruido de
banda limitada o paso banda [n(t)]. En el caso de este último, su densidad espectral de
potencia vendrá dada por:
B
B
⎧⎪ N 0
, fc − T ≤ f ≤ fc + T
SN ( f ) = ⎨ 2
2
2
⎪⎩
0 , resto
O con su representación gráfica:
3
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
SN(f)
BT
No/2
f
-fc
fc
Figura 4. Densidad espectral de potencia de ruido a la salida del filtro paso banda equivalente.
Supondremos que este ruido paso banda n(t), será un ruido de banda estrecha, ya
que se cumplirá: fc >> BT.
El último bloque del modelo de receptor AM para análisis de ruido sería un
demodulador, el cual obtendría la señal de información de salida y(t).
4.2.2.- Análisis de ruido para detección coherente con modulación
DSB-SC.
En el caso de que la modulación empleada en el transmisor fuera DSB-SC, en el
lado del receptor tendríamos el siguiente modelo simplificado para analizar el efecto del
ruido:
s(t)
+
Σ
+
BPF
equivalente
h(t)
x(t)
Modulador
producto
v(t)
LPF
y(t)
ω(t)
Oscilador local
Figura 5. Modelo de receptor DSB-SC, con detección coherente, para análisis de ruido.
Para simplificar el estudio, vamos a tomar las siguientes consideraciones:
•
•
Supondremos que la señal del oscilador local tiene amplitud unitaria
(normalizada).
Además supondremos que existe sincronismo, es decir, que la señal generada
por el oscilador local en el receptor está sincronizada en fase y en frecuencia con
la portadora transmitida.
A continuación, vamos a ir definiendo las potencias promedio en cada bloque,
para poder calcular los parámetros definidos en el primer apartado.
Así, a la entrada del sistema tendremos la señal modulada, s(t), de la forma:
s (t ) = Ac ⋅ cos(2 ⋅ π ⋅ f c ⋅ t ) ⋅ m(t )
4
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
Vamos a considerar a la señal moduladora, m(t), como una función muestra de
un proceso estacionario, de media cero, densidad espectral de potencia SM(f), y ancho de
banda w.
SM(f)
Área: P =
w
−w
S M ( f ) ⋅ df
f
w
-w
∫
Figura 6. Densidad espectral de potencia de la señal moduladora m(t).
El área bajo esta curva será la potencia promedio (P), y nos será útil a la hora de
calcular los parámetros definidos en la introducción del tema.
P = ∫ S M ( f ) ⋅ df
w
−w
Además, vamos a asumir que la señal portadora es estadísticamente
independiente de la señal moduladora. Para indicar esto, se incluye en la portadora una
fase aleatoria (θ), con distribución uniforme entre 0 y 2π radianes:
s (t ) = Ac ⋅ cos(2 ⋅ π ⋅ f c ⋅ t + θ ) ⋅ m(t )
Si hallamos la densidad espectral de potencia de s(t) (ver problema 18 del primer
tema), obtendríamos:
Ss ( f ) =
Ac2
Área:
⋅P
4
Ac2
⋅ [S M ( f − f c ) + S M ( f + f c )]
4
SS(f)
Área:
Ac2
⋅P
4
f
-fc-w
-fc -fc+w
fc-w
fc
fc+w
Figura 7. Densidad espectral de potencia de la señal modulada s(t).
Observando la figura, se deduce que el ancho de banda de s(t) es BT=2w, y su
A2 ⋅ P
potencia promedio c
2
Respecto al ruido, w(t), AWGN, de media nula, y densidad espectral de potencia
No/2, distinguiremos dos situaciones. La primera para su valor de potencia promedio en
5
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
el ancho de banda de la señal de información m(t), y la segunda ese mismo valor, pero
en el ancho de banda de la señal modulada s(t).
Área:
No/2
2⋅ w⋅
No
= w ⋅ No
2
f
w
-w
Figura 8. Densidad espectral de ruido en el ancho de banda de la señal de información m(t).
Área:
No/2
4⋅ w⋅
No
= 2 ⋅ w ⋅ No
2
f
-fc-w
-fc -fc+w
fc-w
fc
fc+w
Figura 9. Densidad espectral de ruido en el ancho de banda de la señal modulada s(t).
Con estos valores, ya podemos calcular las siguientes relaciones señal a ruido:
•
•
SNRc , DSB − SC
SNRi , DSB − SC
Ac2
⋅P
Ac2 ⋅ P
=
= 2
w ⋅ No 2 ⋅ w ⋅ No
Ac2
⋅P
Ac2 ⋅ P
2
=
=
2 ⋅ w ⋅ No 4 ⋅ w ⋅ No
Para calcular la relación señal a ruido a la salida, tendremos que deducir la señal
a la salida del receptor. Así en primer lugar, calculamos la señal x(t) a la salida del filtro
paso banda equivalente:
x(t ) = s (t ) + n(t ) = Ac ⋅ cos(2πf c t ) ⋅ m(t ) + n c (t ) ⋅ cos(2πf c t ) − n s (t ) ⋅ sen(2πf c t )
A la salida del modulador producto, y teniendo en cuenta las siguientes
relaciones trigonométricas:
1
cos a ⋅ cos b = ⋅ [cos(a + b ) + cos(a − b )]
2
1
sena ⋅ cos b = ⋅ [sen(a + b ) + sen(a − b )]
2
Obtenemos:
6
Tema 4: Ruido en modulaciones analógicas
v(t ) = x(t ) ⋅ cos(2πf c t ) =
Teoría de la Comunicación
1
1
1
1
⋅ Ac ⋅ m(t ) + ⋅ nc (t ) + ⋅ [ Ac ⋅ m(t ) + nc (t )] ⋅ cos(4πf c t ) − ⋅ n s (t ) ⋅ sen(4πf c t )
2
2
2
2
Por último, aplicamos el filtrado paso bajo, para eliminar las componentes a alta
frecuencia (2fc):
y (t ) =
1
1
⋅ Ac ⋅ m(t ) + ⋅ nc (t )
2
2
Esta fórmula nos indica que la señal moduladora m(t) y la componente en fase
del ruido nc(t), se suman a la salida; mientras el detector coherente rechaza la
componente en cuadratura del ruido ns(t).
Una vez que deducimos a la salida la componente de señal y la componente de
ruido, vamos a estimar la potencia media de cada una, para hallar la relación señal a
ruido a la salida:
1
• Señal de información a la salida: ⋅ Ac ⋅ m(t ) , con una potencia promedio
2
2
A
asociada de c ⋅ P , siendo P la potencia promedio de m(t).
4
1
• Ruido a la salida: ⋅ nc (t ) . En el primer tema vimos la relación entre la
2
densidad espectral de ruido y sus componentes en fase y en cuadratura para
banda estrecha.
⎧S ( f − f c ) + S N ( f + f c ) , − w ≤ f ≤ w
S Nc ( f ) = S Ns ( f ) = ⎨ N
0,
resto
⎩
SN(f)
No/2
f
-fc-w
-fc -fc+w
fc-w
No
fc
fc+w
SNc(f)= SNs(f)
f
w
-w
Figura 10. Densidad espectral de ruido en el ancho de banda de la señal modulada, y de sus
componentes en fase y cuadratura.
7
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
2
w ⋅ No
⎛1⎞
Así la potencia promedio de ruido a la salida, será: ⎜ ⎟ ⋅ 2 ⋅ w ⋅ N o =
2
⎝2⎠
Recopilando ideas, los parámetros que nos quedan por calcular, serán:
Ac2
⋅P
Ac2 ⋅ P
4
=
• SNRo , DSB − SC =
w ⋅ No 2 ⋅ w ⋅ No
2
SNRo , DSB − SC
• FOM =
=1
SNRc , DSB − SC
•
SNRo , DSB − SC
SNRi , DSB − SC
=2
4.2.3.- Análisis de ruido para detección de envolvente en AM.
Ahora vamos a particularizar el modelo de análisis de ruido general para el caso
de una modulación AM, donde el módulo de demodulación del receptor será un detector
de envolvente. En este caso, sustituimos el bloque demodulador del esquema estudiado
por un detector de envolvente.
Señal AM
+
BPF
equivalente
h(t)
Σ
+
x(t)
Detector de
envolvente
y(t)
ω(t)
Figura 11. Esquema de análisis de ruido para una detección de envolvente en AM.
La señal modulada en AM estará formada por dos bandas laterales y una
portadora:
s(t ) = Ac ⋅ [1 + k a ⋅ m(t )] ⋅ cos(2πf c t )
Siendo ka la sensibilidad en amplitud, que es una constante que determina el
porcentaje de modulación. Analizando esta expresión, obtenemos la potencia promedio
A2 ⋅ k 2
A2
de la portadora ( c ), y de las bandas laterales ( c a ⋅ P ), siendo P la potencia
2
2
promedio de la señal de información m(t). Sumando estos valores se calcularía la
Ac2
⋅ (1 + k a2 ⋅ P )
potencia promedio de la señal:
2
El siguiente paso consiste en calcular la potencia de ruido, que en el ancho de
banda de la señal moduladora m(t) será wNo,; y en el ancho de banda de la señal
modulada s(t) es 2wNo.
8
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
Con estos valores vamos a poder definir la relación señal a ruido en el canal, y a
la entrada del receptor:
•
•
SNRc , AM
SNRi , AM
Ac2
⋅ (1 + k a2 ⋅ P )
Ac2 ⋅ (1 + k a2 ⋅ P )
2
=
=
w ⋅ No
2 ⋅ w ⋅ No
Ac2
⋅ 1 + k a2 ⋅ P
A 2 ⋅ 1 + k a2 ⋅ P
= 2
= c
2 ⋅ w ⋅ No
4 ⋅ w ⋅ No
(
)
(
)
En el caso de la relación señal a ruido a la salida, al igual que pasaba con DSBSC con detección coherente, debemos deducir la señal de salida del receptor. La señal a
la salida del filtro paso banda equivalente:
x(t ) = s(t ) + n(t ) = Ac ⋅ [1 + k a ⋅ m(t )] ⋅ cos(2πf c t ) + n c (t ) ⋅ cos(2πf c t ) − n s (t ) ⋅ sen(2πf c t ) =
= [ Ac + Ac ⋅ k a ⋅ m(t ) + n c (t )] ⋅ cos(2πf c t ) −n s (t ) ⋅ sen(2πf c t )
Si hacemos la representación fasorial de esta señal, donde tomamos como
referencia la componente de la señal:
ns(t)
RESULTANTE
Ac+Ac.ka.m(t)
nc(t)
Figura 12. Representación fasorial de la señal AM con ruido aditivo a la salida del filtro paso
banda equivalente.
De esta forma, a la salida del detector de envolvente:
y (t ) =
[Ac + Ac ⋅ k a ⋅ m(t ) + n c (t )]2 + ns2 (t )
Esta expresión es bastante compleja, por lo que vamos a simplificarla para poder
extraer conclusiones. En principio, vamos a suponer que la potencia de la señal es
mucho mayor que la potencia de ruido (CNR >> 1), por lo que vamos a aproximar:
y (t ) ≈ Ac + Ac ⋅ k a ⋅ m(t ) + n c (t )
El primer término Ac es una componente de continua, generada por el proceso de
demodulación de la portadora transmitida. Esta componente continua no tiene relación
directa con la señal de interés. El segundo término Ac ⋅ ka ⋅ m(t ) es la parte de señal que
llega a la salida, y su potencia promedio será entonces: Ac2 ⋅ k a2 ⋅ P . El último término
nc(t) es la componente de ruido, y su potencia media es 2wNo, ya que tendremos:
9
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
⎧S ( f − f c ) + S N ( f + f c ) ,
S Nc ( f ) = S Ns ( f ) = ⎨ N
0,
⎩
−w ≤ f ≤ w
resto
Por tanto, ya podremos calcular el resto de parámetros que nos faltaban:
Ac2 ⋅ k a2 ⋅ P
2 ⋅ w ⋅ No
SNRo , AM
k a2 ⋅ P
=
=
SNRc , AM (1 + k a2 ⋅ P )
•
SNRo , AM ≈
•
FOM AM
•
SNRo , AM
SNRi , AM
=
2 ⋅ k a2 ⋅ P
(1 + k a2 ⋅ P )
En relación a la SNRo,AM deducida, tenemos que destacar que será válida si y
sólo si el ruido en el receptor es pequeño comparado con la señal (CNR>>1), y si ka se
ajusta para que el porcentaje de modulación sea menor o igual que 100% (así no habría
sobremodulación).
Al comparar con las expresiones que se obtenían para el caso de DSB-SC, ahora
se ve que la FOMAM será siempre menor que la unidad.
¾ Ejercicio: Deducir la FOMAM cuando la señal de información es un tono
simple y calcular su valor para el máximo porcentaje de modulación.
Comparar con la FOMDSB-SC. (Solución FOM AM =
μ2
)
2 + μ2
A continuación, vamos a ver qué pasa cuando la relación portadora a ruido
(CNR) es pequeña en comparación con la unidad, ya que en ese caso el ruido será
predominante. En esta situación se va a dar el denominado efecto umbral, que como
veremos cambiará totalmente el análisis y el funcionamiento del receptor.
Vamos a cambiar la representación del ruido, ahora emplearemos su envolvente
y su fase.
n(t ) = r (t ) ⋅ cos[2πf c t + ψ (t )]
A la salida del filtro paso banda equivalente, tendremos la contribución del ruido
y de la señal modulada, filtrados:
y (t ) = s(t ) + n(t ) = Ac ⋅ [1 + k a ⋅ m(t )] ⋅ cos(2πf c t ) + r (t ) ⋅ cos[2πf c t + ψ (t )]
Si dibujamos el diagrama de fase para la entrada al detector, donde utilizamos
como referencia el ruido, obtenemos la siguiente figura. En ella se puede ver cómo el
ruido es dominante. Al fasor n(t) le añadimos el fasor con módulo Ac ⋅ [1 + k a ⋅ m(t )] y
ángulo ψ(t).
10
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
Ac.[1+ka.m(t)]
RESULTANTE
Ψ(t)
r(t)
Figura 13. Diagrama fasorial a la entrada al detector de envolvente.
Dado que la amplitud del ruido es mayor que la de la señal modulada, vamos a
poder aproximar y(t) por el fasor proyectado en el eje de la referencia.
y (t ) ≈ r (t ) + Ac ⋅ cos[ψ (t )] + Ac ⋅ k a ⋅ m(t ) ⋅ cos[ψ (t )]
Analizando la expresión podemos ver cómo cuando la CNR es baja, a la salida
del detector no hay ningún término directamente proporcional a m(t). Aparece m(t)
multiplicado por cos[ψ(t)], y como el ruido de banda estrecha tiene una fase
uniformemente distribuida entre 0 y 2π. Por tanto, hay una pérdida total de información.
Esta situación se denomina efecto umbral, entendiéndose por umbral al valor de la CNR,
por debajo del cual el funcionamiento del detector frente al ruido se deteriora mucho
más rápido que en proporción a la CNR. Para concluir, simplemente tres ideas:
• Cualquier detector no lineal tiene efecto umbral, a diferencia del detector
coherente.
• En AM con detector de envolvente con un valor de CNR > 6.6 dB podemos
asegurar que se está fuera de la zona umbral.
• Por tanto, el efecto umbral no suele ser muy importante en recepción AM con
detector de envolvente, ya que sólo se precisa de ese nivel de CNR > 6.6 dB para
asegurar que estamos fuera de la zona umbral.
4.3.- Ruido en modulaciones de frecuencia.
4.3.1.- Modelo funcional de receptores FM.
Los receptores FM se denominan heterodinos. En primer lugar vamos a ver el
esquema funcional para un receptor FM.
Señal FM
+
Ruido
Sección de
radiofrecuencia
(RF)
Mezclador
Sección de
frecuencia
intermedia (IF)
Limitador
Discriminador
Oscilador
local
Figura 14. Modelo funcional para un receptor FM.
11
LPF
Señal a la
salida
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
La señal captada por las antenas se amplificaría y filtraría en la sección de
radiofrecuencia (RF). A continuación, con el mezclador controlado por el oscilador
local, se traslada la señal a frecuencia intermedia (IF), siendo su salida amplificada y
filtrada a fIF en la sección de frecuencia intermedia. El limitador elimina la variación de
envolvente, recortando la entrada al mismo, y filtrando la señal cuadrada resultante
mediante un filtro paso banda, que la suaviza eliminando los armónicos de la frecuencia
portadora. El siguiente bloque sería un discriminador que, como se vio en el tema
anterior, consta de un circuito pendiente (genera una modulación híbrida de amplitud y
frecuencia), seguido de un detector de envolvente (extrae la modulación de amplitud de
la señal modulada híbrida, donde está contenida la señal moduladora). Por último, se
aplica un filtro paso bajo o filtro de post-detección, que elimina el ruido fuera del ancho
de banda de la señal de información original m(t).
Para realizar el análisis de ruido vamos a simplificar el esquema anterior, dando
lugar al siguiente diagrama de bloques:
s(t)
+
Σ
+
BPF
equivalente
hIF(t)
x(t)
v(t)
Limitador
LPF
Discriminador
ω(t)
Figura 15. Modelo de receptor FM para análisis de ruido, con ruido aditivo.
A la señal modulada FM, trasladada en frecuencia a fc y con ancho de banda BT,
se le añade el ruido ω(t), que será AWGN, de media nula y densidad espectral de
N
potencia: S ω ( f ) = o . A continuación, la señal suma se filtra con el filtro paso banda
2
equivalente, que representa una cascada de secciones de RF e IF, las cuales permiten
pasar la señal FM sin distorsión. Su respuesta ideal se ilustra a continuación.
|HIF(f)|
BT
1
f
-fc
fc
Figura 16. Respuesta en frecuencia del filtro paso banda equivalente.
Tras el filtrado tenemos ruido de banda estrecha, ya que fc >> BT, y entonces la
señal a la salida del filtro paso banda equivalente queda:
x(t ) = s (t ) + n(t )
El siguiente paso consiste en aplicar a esta señal el limitador y el discriminador,
para su resultado pasarlo por el filtro de post-detección. Este último, consideraremos
que es un filtro paso bajo ideal, con ancho de banda w. Su respuesta normalizada en
frecuencia se muestra en la siguiente figura:
12
y(t)
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
|HPD(f)|
1
-w
f
w
Figura 17. Respuesta normalizada en frecuencia del filtro de post-detección.
4.3.2.- SNR y FOM en receptores FM.
En primer lugar vamos a realizar un análisis de ruido en estos receptores
suponiendo que la potencia de señal es mucho mayor que la potencia de ruido (CNR >>
1). Así, a la salida del filtro IF tenemos ruido de banda estrecha, por lo que lo podremos
representar de la forma:
n(t ) = nc (t ) ⋅ cos(2πf c t ) − n s (t ) ⋅ sen(2πf c t ) = r (t ) ⋅ cos[2πf c t + ψ (t )]
* r (t ) = nc2 (t ) + n s2 (t )
→ Distribución Rayleigh
⎡ n (t ) ⎤
* ψ (t ) = tag −1 ⎢ s ⎥
⎣ nc (t ) ⎦
→ Distribución uniforme entre 0 y 2π
La señal FM:
t
s (t ) = Ac ⋅ cos ⎡2πf ct + 2πk f ∫ m(t ) ⋅ df ⎤ = Ac ⋅ cos[2πf ct + φ (t )]
⎢⎣
⎥⎦
0
Sumando los dos términos (señal y ruido), a la salida del filtro IF equivalente
obtendríamos:
x(t ) = s (t ) + n(t ) = Ac ⋅ cos[2πf c t + φ (t )] + r (t ) ⋅ cos[2πf c t + ψ (t )]
La representación fasorial de esta expresión, donde se toma como referencia la
componente de señal s(t):
RESULTANTE
r(t)
ψ(t) – φ(t)
φ(t)
θ(t)
Figura 18. Diagrama fasorial a la salida del filtro IF equivalente.
r (t ) ⋅ sen[ψ (t ) − φ (t )] ⎤
⎥
⎣ Ac + r (t ) ⋅ cos[ψ (t ) − φ (t )]⎦
⎡
θ (t ) = φ (t ) + tag −1 ⎢
13
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
A diferencia que en las modulaciones en amplitud, ya no interesa la envolvente
de x(t), pues sus variaciones son eliminadas por el limitador. Lo que interesa conocer es
la fase θ(t), donde va la señal de información.
Vamos a asumir que el discriminador es ideal, de esta manera a su salida se
obtendrá:
v(t ) =
1 dθ (t )
⋅
2π dt
La expresión de θ(t) es compleja por lo que la simplificaremos para poder
extraer conclusiones. Supondremos que la CNR >> 1, a la entrada del discriminador; y
denominamos por R a la variable aleatoria obtenida observando el proceso envolvente,
cuya función muestra es r(t). La mayor parte del tiempo R << Ac, por lo que podremos
aproximar la fase como:
tag −1[θ (t )] ≈ θ (t ), si θ (t ) → 0
⇓
r (t )
θ (t ) ≈ φ (t ) +
⋅ sen[ψ (t ) − φ (t )]
Ac
A la salida del discriminador:
v(t ) =
Siendo nd (t ) =
1 dθ (t )
⋅
≈ k f ⋅ m(t ) + nd (t )
2π dt
1
d
⋅ {r (t ) ⋅ sen[ψ (t ) − φ (t )]}
2πAc dt
Si CNR >> 1, la salida será la señal moduladora multiplicada por kf, y una
componente aditiva de ruido nd(t). Vamos a simplificar la componente ruidosa nd(t).
Para ello, partimos de que ψ(t) sigue una distribución uniforme entre 0 y 2π.
• Asumiremos entonces que ψ(t)-φ(t) seguirá también una distribución uniforme
entre 0 y 2π.
• Además el ruido nd(t) va a ser independiente de la señal moduladora, y
dependiente de las características de la portadora y del ruido de banda estrecha.
nd (t ) ≈
1
d
⋅ {r (t ) ⋅ sen[ψ (t )]}
2πAc dt
Como: cos(a + b ) = cos(a ) ⋅ cos(b ) − sen(a ) ⋅ sen(b ) , entonces el ruido queda:
n(t ) = r (t ) ⋅ cos[2πf c t + ψ (t )] = r (t ) ⋅ cos[ψ (t )] ⋅ cos(2πf c t ) − r (t ) ⋅ sen[ψ (t )] ⋅ sen(2πf c t )
* nc (t ) = r (t ) ⋅ cos[ψ (t )] ⇒ Componente en fase del ruido
* n s (t ) = r (t ) ⋅ sen[ψ (t )] ⇒ Componente en cuadratura del ruido
14
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
1 dn s (t )
⋅
, nd(t) depende de la amplitud de la
2πAc
dt
portadora (Ac), y de la componente en cuadratura del ruido de banda estrecha.
Identificando términos: n d (t ) ≈
Respecto la componente de señal k f ⋅ m(t ) , la potencia promedio de señal a la
salida tras el discriminador será k f ⋅ P . El filtro paso bajo que hay a continuación no le
afectará.
En cuanto a la potencia promedio de ruido a la salida, la componente de ruido a
1 dn s (t )
la salida del discriminador era n d (t ) ≈
⋅
, lo cual es equivalente al siguiente
2πAc
dt
esquema:
ns(t)
nd(t)
h(t)
Figura 19. Representación equivalente de la componente de ruido nd(t).
Siendo la transformada de Fourier de la respuesta del filtro:
H(f ) =
1
f
⋅ j 2πf = j ⋅
2πAc
Ac
Y por tanto, la densidad espectral de potencia:
f2
S Nd ( f ) = 2 ⋅ S Ns ( f )
Ac
Si a la entrada del receptor tenemos ruido AWGN, de media cero, y densidad
N
espectral de potencia S ω ( f ) = o , y si el filtro IF equivalente tiene características
2
ideales, a su salida la densidad espectral de ruido será:
BT
SN(f)
No/2
f
-fc-BT/2
-fc+BT/2
fc-BT/2
fc+BT/2
Figura 20. Densidad espectral de ruido a la salida del filtro IF equivalente.
Y su componente en cuadratura quedará:
15
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
SNs(f)
No
f
-BT/2
BT/2
Figura 21. Densidad espectral de la componente en cuadratura de ruido, a la salida del filtro IF
equivalente.
Propagando esta componente a la salida del discriminador, obtenemos la
densidad espectral de nd(t).
⎧ No ⋅ f 2
B
⎪
, f < T
2
S Nd (t ) = ⎨ Ac
2
⎪
0 , resto
⎩
SNd(f)
f
-BT/2
BT/2
Figura 22. Densidad espectral de ruido a la salida del discriminador.
El siguiente bloque después del discriminador será el filtro paso bajo, con ancho
de banda w, que lo que hace es recortar el ancho de banda de la densidad espectral de
ruido SNd(f), ya que en los sistemas FM: w << BT/2. Así la densidad espectral de ruido a
la salida no(t), quedará:
⎧ No ⋅ f 2
, f <w
⎪
S No (t ) = ⎨ Ac2
⎪
0 , resto
⎩
SNo(f)
f
w
-w
Figura 23. Densidad espectral de ruido a la salida.
16
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
Por tanto, la potencia promedio de ruido a la salida será el área bajo SNo(f):
PNo =
No w 2
2 ⋅ w3 ⋅ N o
⋅
f
⋅
df
=
Ac2 ∫− w
3 ⋅ Ac2
De esta expresión, podemos decir que si aumentamos la potencia de la portadora
2
c
A
, el ruido a la salida disminuye.
2
Una vez que ya tenemos las potencias de señal y de ruido en las diferentes partes
del sistema, podemos deducir las expresiones de las relaciones señal a ruido.
•
•
•
•
•
SNRo , FM =
SNRc , FM
SNRi , FM
SNRo , FM
SNRi , FM
FOM =
k 2f ⋅ P
2 ⋅ w3 ⋅ N o
3 ⋅ Ac2
=
3 ⋅ Ac2 ⋅ k 2f ⋅ P
2 ⋅ w3 ⋅ N o
Ac2
Ac2
2
=
=
w ⋅ No 2 ⋅ w ⋅ No
Ac2
Ac2
= 2 =
BT ⋅ N o 2 ⋅ BT ⋅ N o
3 ⋅ Ac2 ⋅ k 2f ⋅ P 2 ⋅ BT ⋅ N o 3 ⋅ k 2f ⋅ BT ⋅ P
=
⋅
=
2 ⋅ w3 ⋅ N o
Ac2
w3
SNRo , FM
SNRc , FM
=
3 ⋅ k 2f ⋅ P
w2
En el tema 2 vimos que: Δf=kf.Amáx ⇒ Δf es proporcional a kf
Δf
• D=
⇒
FOM es proporcional a D2
w
• En FM de banda ancha: BT es proporcional a D
Como conclusión podemos decir que cuando la CNR >> 1, un incremento en el
ancho de banda de transmisión (BT), da lugar a un incremento cuadrático en la SNRo o
en el valor de FOM. Por tanto, en FM existe un mecanismo para intercambiar ancho de
banda por una mejora frente al ruido.
¾ Ejercicio: Deducir la FOMFM cuando la señal de información es un tono
3⋅ β 2
simple. (Solución: FOM FM =
)
2
17
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
4.3.3.-Efecto umbral en FM.
La fórmula de la SNRo,FM es válida si la CNR >> 1 a la entrada del
discriminador. Experimentalmente, conforme aumenta el ruido, la CNR disminuye, y el
receptor FM deja de funcionar. Primero aparecen impulsos ruidosos y si la CNR decrece
más, aparece un mayor número de impulsos ruidosos hasta tener finalmente una señal
ruidosa.
De esta manera, se define el efecto umbral como el mínimo valor de la CNR, que
da lugar a una SNRo no muy diferente del valor predicho mediante la SNRo,FM,
suponiendo bajo ruido.
Vamos a realizar un análisis cualitativo de este efecto, para lo cual supondremos
que no existe modulación. Es decir, sólo tenemos portadora y ruido. Así, a la entrada del
discriminador tendremos:
x(t ) = Ac cos(2πf ct ) + n(t ) = [Ac + nc (t )] ⋅ cos(2πf ct ) − ns (t ) ⋅ sen(2πf ct )
La representación fasorial de esta fórmula se ilustra a continuación.
ns(t)
RESULTANTE
O
Ac
P
r(t)
θ(t)
Q
nc(t)
Figura 24. Representación fasorial del efecto umbral en FM.
nc(t) y ns(t) son señales aleatorias, por lo que el punto P varía también de manera
aleatoria alrededor del punto Q. Si la CNR tiene un valor elevado, es decir, nc(t) y ns(t)
son la mayor parte del tiempo mucho menores que Ac, entonces:
•
•
La mayor parte del tiempo la variación de P será muy cercana a Q.
n (t )
Además: θ (t ) ≈ s , dentro de un múltiplo de 2π radianes.
Ac
En caso de que la CNR sea pequeña, el punto P pasará ocasionalmente alrededor
del punto O. Así, θ(t) aumenta o decrece 2π radianes.
18
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
Figura 25. Componentes impulsivas en θ’(t)=d θ(t)/dt, producidas por cambios de 2π en θ(t); (a) y
(b) son los gráficos de θ(t) y θ’(t), respectivamente.
Cuando el número de impulsos ruidosos es apreciable, estamos en el umbral.
Experimentalmente se demuestra que apenas hay impulsos ruidosos para una CNR ≥ 13
dB (o 20 en unidades naturales), es decir, que estaríamos fuera de la zona umbral. Por lo
tanto, a la salida del discriminador no perdemos señal si:
Ac2
Ac2
CNR =
⇒
≥ 20
≥ 20 ⋅ BT ⋅ N o
2 ⋅ BT ⋅ N o
2
Esto se puede ver en la siguiente figura.
19
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
Figura 26. Dependencia de la SNRo frente a la CNR. En la curva I, se calcula la potencia promedio
de ruido asumiendo una portadora sin modular. En la curva II, la potencia media de ruido a la
salida se calcula asumiendo una señal FM modulada por un tono simple.
20
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
4.3.4.- Redes de pre-énfasis y de-énfasis.
El ruido a la salida del detector FM tiene una dependencia cuadrática con la
frecuencia, tal y como se ha deducido.
SNo(f)
f
-w
w
Figura 27. Ruido a la salida del detector FM.
En cuanto a la densidad espectral de potencia típica de una señal de audio o
vídeo.
SM(f)
f
w
-w
Figura 28. Densidad espectral de potencia típica de una señal de audio o vídeo.
Se puede ver como la densidad espectral de potencia cae apreciablemente a altas
frecuencias. Por otra parte, la densidad espectral de potencia del ruido de salida SNo(f)
crece rápidamente con la frecuencia. Cerca de ±w la potencia de ruido es elevada y la de
señal es baja. Por tanto, no se está utilizando la banda de señal de forma eficiente frente
al ruido.
Una idea es reducir el ancho de banda del filtro de post-detección. Así se elimina
la mayor cantidad posible de ruido, perdiendo a cambio una potencia pequeña de señal.
Sin embargo, es una solución no satisfactoria porque la distorsión de la señal debido a la
reducción del ancho de banda, aunque sea pequeña, no es tolerable.
Otra solución más satisfactoria es utilizar una red de pre-énfasis en el
transmisor, y otra de de-énfasis en el receptor.
• Red de pre-énfasis.
a. Enfatiza artificialmente las componentes a frecuencias elevadas de la
señal, antes de la modulación y antes de que se introduzca ruido en el
receptor.
b. El efecto que consigue es ecualizar la señal de información, de forma
que la potencia se reparta por igual en toda la banda permitida.
• Red de de-énfasis.
a. Se vuelve a repartir la potencia como estaba originalmente en la señal
original.
21
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
b. La potencia de ruido a altas frecuencias, a la salida del discriminador,
se reduce considerablemente. Así se incrementa la SNRo.
Las redes de pre-énfasis y de de-énfasis se utilizan de forma generalizada en
transmisores y receptores de FM. En el siguiente diagrama de bloques se puede ver su
disposición.
Filtro de
pre-énfasis
Hpe(f)
m(t)
Transmisor
FM
+
+
Σ
Filtro de
de-énfasis
Hde(f)
Receptor
FM
Señal
+
Ruido
ω(t)
Figura 29. Esquema de comunicación usando redes de pre-énfasis y de de-énfasis.
La señal de salida no tendrá distorsión, si los filtros de pre-énfasis y de deénfasis son inversos:
H de ( f ) =
1
H pe ( f )
Así, la densidad espectral
independientemente de estos procesos.
de
,− w ≤ f ≤ w
potencia
de
la
señal
detectada
es
Deducción del factor de mejora con las redes de pre-énfasis y de-énfasis:
El factor de mejora en la SNRo viene dado por la siguiente expresión:
I=
SNRO con pre − énfasis y de − énfasisi
SNRO sin pre − énfasis y de − énfasisi
=
Potencia media de ruido de salida sin pre − énfasis y de − énfasis
Potencia media de ruido de salida con pre − énfasis y de − énfasis
La densidad espectral de potencia de ruido sin pre-énfasis y de-énfasis ya se ha
2 ⋅ N o ⋅ w3
deducido anteriormente, cuyo valor era
.
3 ⋅ Ac2
Por otro lado, también hemos deducido la densidad espectral de potencia de
ruido antes del filtro de post-detección para una CNR >> 1:
⎧ No ⋅ f 2
B
, f ≤ T
⎪
S Nd ( f ) = ⎨ Ac2
2
⎪
0 , resto
⎩
Por tanto, la densidad espectral de potencia de ruido a la salida del filtro de deénfasis será:
2
H de ( f ) ⋅ S Nd ( f )
Como el filtro de post-detección tiene un ancho de banda w << BT/2, la potencia
promedio de ruido a la salida con una red de de-énfasis será:
22
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
No w 2
2
⋅
f ⋅ H de ( f ) ⋅ df
2 ∫− w
Ac
De esta forma, la mejora en la SNRo quedaría:
I=
2 ⋅ w3
3 ⋅ ∫ f 2 ⋅ H de ( f ) ⋅ df
w
2
−w
A modo de ejemplo, para la FM comercial: fo=2.1 KHz., w=15 KHz, y las redes
típicas de pre-énfasis y de-énfasis, el factor de mejora en la SNRo es de I=22 (13 dB).
4.4.- Resumen.
En este apartado vamos a comparar diferentes esquemas estudiados, para lo cual
vamos a suponer:
• La señal moduladora es sinusoidal.
• Todos los sistemas aportan el mismo valor de SNRc.
• Hay que tener en cuenta el ancho de banda de cada sistema, por lo que
definiremos un ancho de banda normalizado:
BT
w
Bn =
Siendo BT el ancho de banda de s(t), y w el ancho de banda de m(t).
En la siguiente figura se muestra una comparación para diferentes esquemas de
modulación:
I.
AM con detección de envolvente.
SNRo =
II.
μ2
⋅ SNRc , siendo μ el porcentaje de modulación.
2+ μ2
- En la curva I: μ=1, y hay efecto umbral AM
- Como se transmiten dos bandas: Bn=2.
DSB-SC y SSB con detección coherente.
SNRo = SNRc
III.
- En la curva II se puede ver como estos esquemas son superiores a AM
en 4.8 dB, y no existe el efecto umbral.
- Ahora los anchos de banda serían: Bn,DSB-SC=2, y: Bn,SSB=1.
FM con discriminador.
3
SNRo = ⋅ β 2 ⋅ SNRc , siendo β el índice de modulación.
2
23
Tema 4: Ruido en modulaciones analógicas
•
•
•
Teoría de la Comunicación
En la curva III: β=2 con efecto umbral. Se produce una mejora de 20.8
dB al comparar con SSB. Siendo el ancho de banda normalizado, según
la regla del 1%: Bn=8.
En la curva IV: β=5, con efecto umbral. Se produce una mejora de 8 dB,
respecto a FM con: β=2. En cuanto al ancho de banda normalizado,
según la regla del 1%, será: Bn=16.
En ambas curvas se incluye una mejora de 13 dB, con las redes de preénfasis y de de-énfasis. Así se produce una mejora clara de FM de banda
ancha, respecto a AM. El precio a pagar sería un aumento del ancho de
banda de transmisión (mecanismo en FM de intercambiar ancho de banda
frente a SNR).
Figura 30. Comparación de la mejora de la SNR de varios sistemas de modulación analógicos.
Curva I: AM, con μ=1. Curva II: DSB-SC y SSB. Curva III: FM, con β=2. Curva IV: FM, con β=5.
(Las curvas III y IV incluyen una mejora de 13 dB por las redes de pre-énfasis y de-énfasis).
24
Tema 4: Ruido en modulaciones analógicas
Teoría de la Comunicación
4.5.- Bibliografía.
[1]
[2]
[3]
Simon Haykin, Communications Systems, Ed. John Wiley & Sons, 4rd
edition, 2001.
Marcos Faúndez Zanuy, Sistemas de Comunicaciones,. Ed. Marcombo
Boixareu, 2001.
John G. Proakis, Digital Communications, Ed. McGraw Hill, 3ª edición,
1995.
25
TEORÍA DE LA COMUNICACIÓN
CUESTIONES TEMA 4
RUIDO EN MODULACIONES ANALÓGICAS
1.- ¿Cómo se define (SNR)o, (SNR)c, CNR, (SNR)i y FOM?
2.- Modelo funcional de un receptor de modulación de amplitud para el análisis del ruido.
3.- Si el ruido es AWGN con media cero y densidad espectral de potencia N0/2 a la entrada
del receptor, ¿cómo es el ruido a la salida del filtro paso banda equivalente?
4.- Deducir el valor de FOM y (SNR)o/(SNR)i para DSBSC con detección coherente
5.- Deducir el valor de FOM para AM con detector de envolvente cuando el valor de CNR
es elevado. ¿Cuál es el valor máximo en el caso de que la señal moduladora sea sinusoidal?
6.- ¿Qué se entiende por el efecto umbral en AM?. Aproximadamente, ¿para qué valor de
CNR el receptor está por encima del umbral?. ¿Es necesario tener en cuenta el efecto
umbral en AM?
7.- Modelo de un receptor de FM con discriminador. ¿Por qué se introduce el limitador?.
¿Cuál es la función del filtro de postdetección?
8.- Modelo de un receptor de FM para el análisis del ruido.
9.- Si el valor de CNR es elevado, deducir la expresión del término de ruido presente en la
señal a la salida del discriminador. ¿Depende de la componente en fase del ruido a la salida
del filtro de frecuencia intermedia?. ¿Cuál es la densidad espectral de potencia de este ruido
y cuál es la del ruido a la salida del filtro de postdetección?
10.- Deducir el valor de FOM para el caso FM. En el caso de que la señal moduladora sea
sinusoidal, ¿cuál es entonces el valor de FOM?
11.- ¿Qué se entiende por efecto umbral en FM?.
12.- Comparar la curva real de (SNR)o en función del valor de CNR, ρ, con la expresión
calculada para CNR elevado. ¿Cuál es el valor de ρ para el que el sistema está trabajando
fuera del alcance del efecto umbral?.
13.- ¿Por qué surge la necesidad de redes de pre-énfasis y de-énfasis?
14.- ¿Cuál es el diagrama de un sistema FM que utiliza redes de pre-énfasis y de-énfasis?.
¿Cuál es la relación entre las funciones de transferencia de ambas redes?
15.- ¿Cómo se define el factor de mejora debido a las redes de pre-énfasis y de-énfasis I?.
Deducir su expresión en función del ancho de banda de la señal moduladora W y de Hde(f)
función de transferencia del filtro de de-énfasis. ¿Cuál es un valor típico para el factor de
mejora I?
16.- Dibujar y comparar las curvas de (SNR)o en función (SNR)c para AM, DSBSC y FM.
Para estos tipos de modulación, ¿cuál es el valor de Bn (ancho de banda de señal modulada
normalizado al ancho de banda de señal moduladora)?
TEORÍA DE LA COMUNICACIÓN
PROBLEMAS TEMA 4
RUIDO EN MODULACIONES ANALÓGICAS
1.- Realizar el análisis de ruido para la modulación SSB, donde se transmite la banda lateral
inferior, y en el receptor se utiliza una detección coherente. Suponer un ruido aditivo,
blanco, gaussiano con media cero y densidad espectal de potencia N0/2, y que la señal
moduladora m(t) es una función muestra de un proceso estacionario de media cero y su
densidad espectral de potencia tiene un ancho de banda W. Deducir la SNRc, SNRi, SNRo,
y FOM.
2.- En un receptor que utiliza detección coherente, la señal sinusoidal generada por el
oscilador local tiene un error de fase θ(t) con respecto a la portadora cos(2πfct). Supóngase
que θ(t) es una función muestra de un proceso gaussiano de media cero y varianza σ Θ2 , y
que la mayor parte del tiempo el valor máximo de θ(t) es pequeño comparado con la
unidad. Encontrar el error cuadrático medio de la salida del receptor para:
a) modulación DSBSC
b) modulación SSB donde se transmite la banda lateral superior
El error cuadrático medio está definido como el valor esperado del cuadrado de la
diferencia entre la salida del receptor y la componente moduladora de la salida del receptor.
3.- El siguiente diagrama de bloques muestra un sistema de modulación SSB con una señal
piloto que está armónicamente relacionada con la portadora:
Ruido blanco
gaussiano
Señal de
entrada
Modulador
SSB
+ ∑
Multiplicador
de frecuencia
Portadora
fuente
Canal
+ ∑
+
+
Fltro de
predetección
Detector
coherente
Señal de
salida
Señal
piloto
Filtro paso
banda piloto
Portadora
local
Divisor de
frecuencia
En el receptor se utiliza un filtro paso banda de ancho Δf para extraer la señal piloto de la
señal recibida ruidosa. A continuación se divide en frecuencia dicha señal piloto para
obtener la portadora local para demodulación. Se incluye un filtro de predetección para
limitar el espectro a la entrada del detector coherente a la mínima banda posible de
frecuencias. El ruido blanco aditivo a la entrada del receptor tiene media cero y densidad
espectral de potencia N0/2. Suponiendo que la SNR es grande, determinar la varianza del
error de fase de la portadora local aplicada al detector coherente.
4.- Una señal modulada SSB se transmite por un canal ruidoso, cuya densidad espectral de
potencia es:
SN(f)
(W/Hz)
10-6
-400
0
400
f (KHz)
El ancho de banda de la señal moduladora es 4 KHz y la frecuencia portadora es 200 KHz.
Suponiendo que únicamente se transmite la banda lateral superior, que la amplitud de la
portadora es 1 vol., y que la potencia media de la señal moduladora es de 10 W, determinar
la SNR a la salida del receptor suponiendo que el filtro de predetección es ideal.
5.- Considerar un sistema modulador de fase (PM), que tiene la siguiente señal modulada:
s(t) = Ac cos [2πfct + kpm(t)]
donde kp es una constante y m(t) es la señal moduladora. El sistema tiene ruido aditivo a la
entrada del detector de fase:
n(t) = nc(t)cos(2πfct) - ns(t)sin(2πfct)
Suponiendo que el valor de CNR es elevado comparado con la unidad a la entrada del
detector, determinar:
a) el valor de SNR a la salida
b) el valor de FOM del sistema
Comparar los resultados con los obtenidos para el caso FM con modulación sinusoidal.
6.- La señal de entrada de un receptor FM consiste en una portadora sin modular
acompañada de una señal sinusoidal interferente. El nivel de la señal interferente está 20 dB
por debajo del nivel de la señal portadora, siendo la separación entre ambas señales de 15
KHz. Suponiendo que el receptor utilice un discriminador ideal de frecuencias con
sensibilidad de 0.2 V/KHz, determinar la tensión de salida del receptor.
7.- Suponer que el espectro de la señal moduladora ocupa el intervalo de frecuencias
f1 ≤ f ≤ f 2 . Para acomodar esta señal, el receptor de un sistema FM (sin pre-énfasis y deénfasis) utiliza un filtro paso banda ideal de postdetección conectado a la salida del
discriminador de frecuencia; el filtro deja pasar la banda de señales comprendidas en el
intervalo de la señal moduladora, es decir, f1 ≤ f ≤ f 2 . Determinar el valor de SNR a la
salida y FOM del sistema en presencia de ruido aditivo, blanco, gaussiano, de media cero y
densidad espectral de potencia N0/2. Suponer que el valor de CNR es elevado comparado
con la unidad.
8.- Un sistema FDM utiliza modulación SSB para combinar 12 señales de voz de fuentes
independientes. Luego utiliza modulación en frecuencia para transmitir la señal banda base
compuesta. Cada señal de voz tiene una potencia media P y ocupa la banda de frecuencias
de 300 a 3400 Hz; el sistema FDM considera que el ancho de banda es de 4 KHz. Para
cada señal de voz, sólo se transmite la banda lateral inferior. Las subportadoras utilizadas
para el primer nivel de modulación son (f0=4 KHz.):
ck(t) = Ak cos(2πkf0t) para 1 ≤ k ≤ 12
La señal recibida está formada por la señal FM transmitida sumada a ruido blanco
gaussiano de media cero y de densidad espectral de potencia N0/2.
a) Dibujar la densidad espectral de potencia de la señal a la salida del discriminador de
frecuencias, mostrando por un lado la componente de señal y por otro la componente de
ruido. Suponer CNR elevado comparado con la unidad.
b) Encontrar el valor de las amplitudes de las subportadoras Ak de modo que las señales de
voz demoduladas tengan igual valor de SNR.
9.- Sea el filtro de pre-énfasis mostrado en la siguiente figura:
C
Amplificador
Señal de
entrada
r
R
Señal de
salida
donde R << r y 2πfCR << 1 en la banda de interés. El parámetro de este filtro es
f0=1/(2πCr), siendo su función de transferencia:
H pe ( f) = 1 +
jf
f0
Si dicho filtro se utiliza con señales moduladoras de voz, el transmisor FM da lugar a una
señal que es esencialmente modulada en frecuencia por las bajas frecuencias de la señal de
voz y modulada en fase por las altas frecuencias de la señal de voz. Explicar las razones de
este fenómeno.
10.- Suponer que las funciones de transferencia para el par de filtros de pre-énfasis y deénfasis de un sistema FM se escalan como sigue:
⎛
jf ⎞
H pe ( f) = k ⎜⎜ 1 + ⎟⎟
⎝ f0 ⎠
⎛
⎜
1⎜ 1
H de ( f) =
k ⎜ 1 + jf
⎜
f0
⎝
⎞
⎟
⎟
⎟
⎟
⎠
El factor de escala k se elige de modo que la potencia media de la señal moduladora
enfatizada sea la misma que la potencia media de m(t).
a) Encontrar el valor de k que satisface este requisito cuando la densidad espectral de
potencia de la señal moduladora m(t) sea:
⎧ S0
2
⎪⎪
⎛f ⎞
S M ( f) = ⎨ 1 + ⎜ ⎟
⎜ ⎟
⎪ ⎝ f0 ⎠
⎪⎩ 0
para - W ≤ f ≤ W
para el resto
b) ¿Cuál es el valor I correspondiente a la mejora de prestaciones en la SNR gracias a la
utilización de este par de filtros de pre-énfasis y de-énfasis? Comparar este resultado con el
obtenido sin factor de escala.
11.- Un sistema de modulación de fase (PM) utiliza un par de filtros de pre-énfasis y deénfasis definidos por las funciones de transferencia:
H pe ( f) = 1 +
jf
f0
H de ( f) =
1
1+
jf
f0
Mostrar que la mejora de prestaciones en la SNR0 debido a la utilización de estos filtros es:
W
f0
I=
⎛W⎞
tan -1 ⎜⎜ ⎟⎟
⎝ f0 ⎠
Evaluar esta mejora cuando W = 15 KHz y f0 = 2.1 KHz y compáralo con el valor
correspondiente para el caso FM. Suponer que el valor de CNR es elevado comparado con
la unidad.
TEORÍA DE LA COMUNICACIÓN
SOLUCIONES DE LOS PROBLEMAS TEMA 4
RUIDO EN MODULACIONES ANALÓGICAS
1.
a) SNRc , SSB = SNRi , SSB = SNRo , SSB
2.
Ac2 ⋅ P
=
4 ⋅ω ⋅ N0
FOM SSB = 1
Para. s (t ) = Ac ⋅ m1 (t ) ⋅ cos(2πf c t ) − Ac ⋅ m2 (t ) ⋅ sen(2πf c t )
ε (t ) =
] {
}
Ac2
Ac2
σ N2
2
2
2
2
(
)
(
)
(
)
(
)
⋅ E m1 t ⋅ E [1 − cos[θ t ]] +
⋅ E m2 t ⋅ E sen [θ t ] +
4
4
4
[
[
] [
]
a) En el caso de la modulación DSB-SC.
m1 (t ) = m(t ) ; m2 (t ) = 0 ; P = E m12 (t )
3 ⋅ Ac2 ⋅ P ⋅ σ Θ4 σ N2
ε≈
+
16
4
[
]
b) Para la modulación SSB.
1
1
m1 (t ) = ⋅ m(t ) ; m2 (t ) = mˆ (t ) ; P = 4 ⋅ E m12 (t ) = 4 ⋅ E m22 (t )
2
2
2
2
2
A ⋅ P ⋅σ Θ σ N
+
ε≈ c
16
4
∆f ⋅ N
3. σ φ2 = 2 '20
n ⋅ Ac
[
4. SNRo ≈ 6.31 ⋅ 10 2 ⇒ SNRo (dB ) ≈ 28 dB
5.
a) SNRo , PM =
k p2 ⋅ Ac2 ⋅ P
2 ⋅ω ⋅ N0
b) FOM PM = k p2 ⋅ P
En el caso de una modulación sinusoidal:
3
• FM: FOM FM = ⋅ β 2
2
•
6.
PM: FOM PM =
β p2
2
v0 (t ) = 0.3 ⋅ cos 2 ⋅ π ⋅ 15 ⋅ 10 ⋅ t (Volt.)
(
3
)
1
]
[
]
7.
SNRo =
FOM =
3 ⋅ Ac2 ⋅ k 2f ⋅ P
(
2 ⋅ N 0 ⋅ f 23 − f 13
)
3 ⋅ k 2f ⋅ P ⋅ ( f 2 − f1 )
f 23 − f 13
8.
a) Densidad espectral de potencia de la señal banda base.
Densidad espectral de potencia de la componente de señal a la salida del
discriminador, para frecuencias positivas (f > 0).
Densidad espectral de potencia de la componente de ruido a la salida del
discriminador, para frecuencias positivas (f > 0).
b) Ak = A ⋅ 3 ⋅ k 2 − 3 ⋅ k + 1 , k = 1,2,K12 , A: constante
R
9. A bajas frecuencias: H ( f ) ≈ ⇒ FM
r
dv (t )
A altas frecuencias: H ( f ) ≈ j ⋅ 2 ⋅ π ⋅ f ⋅ R ⋅ C ⇒ v o (t ) ≈ R ⋅ C ⋅ i ⇒ PM
dt
10.
a) k =
ω
⋅ tag −1
ω
f0
f0
2
ω
ω
⋅ tag −1
f
f0
b) Con factor de escala: I ' = 0
ω
ω
3 ⋅ − tag −1
f 0
f0
2
Sin factor de escala: I =
ω
f0
ω
I FM =
f0
ω
tag −1
f0
⇒ I PM ≈ 7 dB
ω
f0
3
ω
ω
3 ⋅ − tag −1
f0
f0
3
ω
ω
3 ⋅ − tag −1
f0
f0
11. Es una demostración.
I PM =
⇒ I FM ≈ 13 dB
3
UNIVERSIDAD DE VALLADOLID
E.T.S. INGENIEROS DE TELECOMUNICACIÓN
TEORÍA DE LA COMUNICACIÓN
Tema 5: Modulación Analógica y Digital
de Pulsos
Teoría de la Comunicación - Curso 2010-2011
TEMA V. Modulación
analógica y digital de pulsos
5.1.-Teorema de muestreo
5.2.-Modulación de pulsos en amplitud (PAM)
5.3.-Modulación de pulsos en el tiempo (PDM
y PPM)
5.4.-Modulación digital de pulsos (PCM)
5.5.-Códigos de línea
Tema V: Modulación Analógica y Digital de Pulsos
Introducción
Hasta ahora hemos visto como una señal analógica varía de
forma continua un parámetro de una portadora sinusoidal
(amplitud, fase y frecuencia)
En este tema vamos a considerar un tren de pulsos que se
ve modificado por las características de la señal
moduladora (señal de información)
Hay 2 tipos:
Modulación analógica de pulsos. Se modifica algún parámetro del
tren de pulsos (amplitud, posición, duración)
M d l ió digital
Modulación
di it l de
d pulsos.
l
La
L señal
ñ l a transmitir
t
iti se discretiza
di
ti en
tiempo y amplitud
¾ Se envía una secuencia de pulsos codificados
Los dos tipos de modulaciones utilizan muestras de la
señal a transmitir
Teorema de muestreo
1
Tema V: Modulación Analógica y Digital de Pulsos
5.1.- Teorema de muestreo
El proceso de muestreo consiste en obtener
t discretas
di
t de
d una señal
ñ l continua
ti
ti
muestras
en tiempo
¾Partimos de la señal de energía finita: g(t)
¾Suponemos que muestreamos g(t) a una tasa uniforme
cada TS segundos
¾Obtenemos una secuencia de números espaciados TS
segundos:
g
{g[nTS ]}
n : Valor entero
TS : Periodo de muestreo
fS =
1
: Frecuencia de muestreo
TS
Tema V: Modulación Analógica y Digital de Pulsos
5.1.- Teorema de muestreo
E proceso lo
Este
l podemos
d
ver como:
g (t )
×
g (t )
t
δ T (t ) =
S
gδ (t ) = g (t ) ⋅ δ TS (t ) =
+∞
∑ g (nT )⋅ δ (t − nT )
n = −∞
S
S
gδ (t )
+∞
∑ δ (t − nT )
n = −∞
S
Es de notar la dualidad:
t
Señal periódica
en tiempo
⇔
Muestras en tiempo (tren
de deltas en tiempo)
Tren de deltas en frecuencia
(muestras de la TF de un
período de la señal)
⇔
Señal periódica en frecuencia
2
Tema V: Modulación Analógica y Digital de Pulsos
5.1.- Teorema de muestreo
Una cuestión importante consiste en ver si a partir
de las muestras [gδ(t)] vamos a poder recuperar la
señal original [g(t)]
¾Dependerá de la banda de frecuencia de la señal y de la
tasa de muestreo
¾Vamos a analizar la señal en el dominio de la frecuencia
¾Partimos de la señal muestreada: gδ(t)=g(t) ⋅δTS(t), y
hallamos su transformada de Fourier
Tema V: Modulación Analógica y Digital de Pulsos
5.1.- Teorema de muestreo
¾ Hallamos la T.F. del tren de deltas
δ T (t ) =
S
⎛
n⎞
1
∑ δ (t − nT ) ⇔ δ ( f ) = T ∑ δ ⎜⎜ f − T ⎟⎟
+∞
+∞
S
n = −∞
TS
S n = −∞
⎝
S
⎠
(Señal periódica)
¾ La T.F. de la señal muestreada
Gδ ( f ) = G ( f ) ∗
Gδ ( f ) =
1
TS
+∞
⎛
n = −∞
⎝
1
TS
+∞
⎛
n = −∞
⎝
n⎞
⎟⎟
S ⎠
∑ δ ⎜⎜ f − T
+∞
n⎞
⎟⎟ = f S ∑ G ( f − nf S )
n = −∞
S ⎠
∑ G⎜⎜ f − T
(Repetición periódica del
espectro de la señal original)
3
Tema V: Modulación Analógica y Digital de Pulsos
5.1.- Teorema de muestreo
|G(f) |
A
-w
0
w
f
|Gδ(f) |
A⋅ fS
...
-w
-fS
...
0
w
f
fS
¾ El proceso de muestreo uniforme de una señal en el dominio del
tiempo da lugar a un espectro periódico en el dominio de la
frecuencia, con periodo igual a la frecuencia de muestreo
Tema V: Modulación Analógica y Digital de Pulsos
5.1.- Teorema de muestreo
¾ También puede obtenerse la T.F. de gδ(t) de forma directa, a partir
d sus muestras
de
t
gδ (t ) =
+∞
+∞
∑ g (nT )⋅ δ (t − nT ) ⇔ Gδ ( f ) = ∑ g (nT )e
n = −∞
S
S
n = −∞
− j 2πfnTS
S
¾ Agrupando las ideas anteriores se puede concluir que si
a) G(f) = 0, para | f | ≥ w
b)) fS ≥ 2w (fS = 2w: frecuencia de Nyquist)
yq )
9 Entonces: G(f) = (1/fS) ⋅ Gδ(f), para | f | ≤ w
Donde Gδ(f) es función exclusiva de g(nTS), es decir, de
muestras de la señal original
4
Tema V: Modulación Analógica y Digital de Pulsos
5.1.- Teorema de muestreo
Teorema de muestreo
¾Una señal limitada en banda, de energía finita, que no
tiene componentes en frecuencia mayores de w (Hz),
está completamente descrita especificando los valores
de la señal en instantes de tiempo separados 1/(2w) seg.
¾Una señal limitada en banda, de energía finita, sin
componentes
co
po e tes een frecuencia
ecue c a mayores
ayo es de w ((Hz),
), puede
ser recuperada totalmente a partir de muestras tomadas a
una tasa de 2w muestras por segundos
Tema V: Modulación Analógica y Digital de Pulsos
5.1.- Teorema de muestreo
Reconstrucción de la señal
+∞
⎧
⎫
⎪Gδ ( f ) = ∑ g (nTS )e − j 2πfnTS ⎪
⎨
⎬
n = −∞
⎪⎩
⎪⎭
f S = 2w
+∞
+w
−∞
−w
g (t ) = ∫ G ( f )e j 2πft df = ∫
1 +∞ ⎛ n ⎞ − j
=∫
∑ g ⎜ ⎟e
− w 2w
n = −∞ ⎝ 2 w ⎠
1
Gδ ( f )e j 2πft df =
fS
πnf
+∞
⎛
n ⎞
⎛ n ⎞ 1 + w j 2πf ⎜⎝ t − 2 w ⎟⎠
e df = ∑ g ⎜
df =
⎟
∫−w e
n = −∞ ⎝ 2 w ⎠ 2 w
+∞
⎛ n ⎞ sen(2πwt − nπ ) + ∞ ⎛ n ⎞
= ∑ g⎜
= ∑ g⎜
⎟ sinc(2 wt − n )
⎟
2πwt − nπ
n = −∞ ⎝ 2 w ⎠
n = −∞ ⎝ 2 w ⎠
+w
w
j 2πft
5
Tema V: Modulación Analógica y Digital de Pulsos
5.1.- Teorema de muestreo
Ecuación de interpolación
¾ Sirve para reconstruir la señal original a partir de las
muestras de {g(n/2w)}, usando como funciones de
interpolación sinc(2wt)
g (t ) =
+∞
⎛ n ⎞
∑ g ⎜⎝ 2w ⎟⎠ sin c(2wt − n)
n = −∞
Tema V: Modulación Analógica y Digital de Pulsos
5.1.- Teorema de muestreo
Si fS < 2w,
2 se produce
d
solapamiento
l
i
(aliasing)
( l
) espectrall
¾Las réplicas desplazadas en frecuencia se solapan
|Gδ(f) |
...
...
-2fS
-fS -w
0
w
fS
2fS
f
Para combatir el efecto del solapamiento
¾Antes de muestrear se utiliza un filtro paso bajo anti-aliasing
¾Muestrear la señal filtrada por encima de la frecuencia de
Nyquist
6
Tema V: Modulación Analógica y Digital de Pulsos
5.2.- Modulación de pulsos en
amplitud
En la modulación de pulsos en amplitud (PAM) se varía la
amplitud de unos pulsos esquiespaciados, en función de los
valores muestreados de la señal continua de información,
m(t)
s(t )
m(t )
t
t
T0 TS
Para generar las señales PAM intervienen dos procesos
¾ Muestrear la señal m(t) cada TS (TS = 1/fS) segundos, de manera que
SAMPLE
⇐ fS verifique el teorema de muestreo
&
HOLD
¾ Mantener la duración de cada pulso un tiempo T
0
Tema V: Modulación Analógica y Digital de Pulsos
5.2.- Modulación de pulsos en
amplitud
En el proceso sample & hold intervienen las siguientes
señales:
¾ m(t): Señal que contiene la información
¾ h(t): Pulso base
⎧1 ,0 < t < T0
h(t )
⎪1
h(t ) = ⎨
, t = 0, t = T0 ⇔ H ( f ) = T0 ⋅ sin c( f ⋅ T0 ) ⋅ e − jπfT0
2
⎪
t
⎩ 0 , resto
T0
¾ p(t): Onda pulsada
p(t )
t
T0
TS
Así podemos escribir la señal PAM: s(t ) =
+∞
∑ m(nT ) ⋅ h(t − nT )
n = −∞
S
S
7
Tema V: Modulación Analógica y Digital de Pulsos
5.2.- Modulación de pulsos en
amplitud
Operando:
O
d
+∞
+∞
s(t ) = h(t ) ∗ ∑ m(t ) ⋅ δ (t − nTS ) = h(t ) ∗ ∑ m(nTS ) ⋅ δ (t − nTS )
n = −∞
n = −∞
Versión muestreada de m(t) ⇒ mδ(t)
s(t ) = h(t ) ∗ mδ (t )
En el dominio de la frecuencia:
S ( f ) = H ( f )⋅ M δ ( f )
Como:
Mδ ( f ) = fS
+∞
∑ M ( f − kf )
k = −∞
S
Obtenemos:
S ( f ) = H ( f )⋅ f S
+∞
⎛
k = −∞
⎝
k ⎞
⎟⎟
S ⎠
∑ M ⎜⎜ f − T
Tema V: Modulación Analógica y Digital de Pulsos
5.2.- Modulación de pulsos en
amplitud
Una vez planteado
U
l t d cómo
ó
es la
l señal
ñ l modulada
d l d
s(t), vamos a ver cómo recuperar la señal de
información m(t):
1) Interpolar la señal pulsada s(t)
2) Muestrear la señal pulsada e interpolar
3) Promediar la señal pulsada,
pulsada muestrear e interpolar
8
Tema V: Modulación Analógica y Digital de Pulsos
5.2.- Modulación de pulsos en
amplitud
1) Interpolar la señal modulada s(t)
¾ S
Suponemos que m(t)
(t) está
tá limitada
li it d en banda
b d entre
t ± w y que
muestreamos a una frecuencia fS ≥ 2w
¾ Tenemos una versión distorsionada del espectro de m(t), ya
que aparece distorsión debido a H(f)
|H(f) |
S ( f ) = f S ⋅ H ( f )⋅ M ( f ) , f ≤ w
H ( f ) = T0 ⋅ sin c( fT0 ) ⋅ e − jπfT0
-1/T0
1/T0
f
¾ Si T0 << TS (1/T0 >> 1/TS), prácticamente no hay distorsión
¾ Práctica: T0 = TS/10
|Mδ(f) |
|H(f) |
|M(f) |
...
...
-1/T0
-2fS
-1/TS -w
w
1/TS
2fS
1/T0
f
Tema V: Modulación Analógica y Digital de Pulsos
5.2.- Modulación de pulsos en
amplitud
2) Muestrear la señal pulsada e interpolar
¾ Eliminamos la distorsión debida a H(f)
s (t )
...
...
t
¾ Habría problemas si la señal recibida está contaminada con
ruido ((suponemos
p
ruido de media nula))
9 Tenemos varios valores que muestrear: mi(nT0)+ni
s (t )
...
...
t
9 Posible solución: promediar esos valores
9
Tema V: Modulación Analógica y Digital de Pulsos
5.2.- Modulación de pulsos en
amplitud
3) Promediar, muestrear e interpolar
¾ Promediando
1
T0
1
1
∫ s(t )dt = T ∫ [m(nT ) + n(t )]dt = m(nT ) + T ∫ n(t )dt
T0
0
T0
S
S
0
T0
La varianza del ruido a la salida es
menor que a la entrada del integrador
¾ El integrador es análogo a convolucionar con un filtro de respuesta
al impulso rectangular, de anchura T0
1/T0
h(t )
T0
t
¾ El filtro que utilizamos es proporcional a los pulsos que empleamos
para transmitir la señal
¾ Filtro adaptado. Se emplea un filtro que coincide con los pulsos
de la señal que se envía (se estudia en el tema 6)
Tema V: Modulación Analógica y Digital de Pulsos
5.2.- Modulación de pulsos en
amplitud
¾ Esta tercera posibilidad contiene a las dos anteriores,
anteriores
añadiendo un filtrado inicial de la señal para minimizar el
ruido
s(t )
Filtro de
promediado
Muestreo
k ⋅ TS
Interpolador
m̂(t )
10
Tema V: Modulación Analógica y Digital de Pulsos
5.2.- Modulación de pulsos en
amplitud
Utilid d de
Utilidad
d lo
l comentado
t d anteriormente:
t i
t
1) Multiplexación por división en el tiempo (TDM)
¾ Muestreamos cada TS, pero transportamos información
únicamente durante T0 segundos
¾ El resto del tiempo se puede transmitir otras señales: m1(t),
m2(t), …
m1(t)
0
T0
TS
t
m2(t)
t
…
Tema V: Modulación Analógica y Digital de Pulsos
5.2.- Modulación de pulsos en
amplitud
2) Justificación del uso de arquitecturas digitales
¾ La señal llega contaminada con ruido
1
[m(nTS ) + n(t )]dt
m(nTS)
T0 ∫ T0
⇒ Cuando promediamos disminuimos el
ruido, pero no lo eliminamos
¾ Si tuviéramos un conjunto finito de amplitudes que enviar:
A1, A2, …,, An, las muestras sólo ppodrán tomar esos valores
⎧ A1 + n(t )⎫
⎪ A + n(t )⎪
⎪
⎪
m(nTS ) = ⎨ 2
⎬ = An + nˆ (t )
M
⎪
⎪
⎪⎩ An + n(t )⎪⎭
⇒ Si el ruido es suficientemente
pequeño, se puede decidir
correctamente qué símbolo An se
ha transmitido, eliminando
totalmente el ruido
11
Tema V: Modulación Analógica y Digital de Pulsos
5.3.- Modulación de pulsos en
el tiempo (PDM y PPM)
H
Hemos
visto:
it
¾PAM (Modulación por amplitud de pulsos)
9 La amplitud de los pulsos se varía en función de los valores
muestreados de la señal de información m(t)
Pero también podemos tener:
¾PDM ((Modulación ppor duración de ppulsos))
9 La duración de los pulsos se varía en función de los valores
muestreados de la señal de información m(t)
¾PPM (Modulación por posición de pulsos)
9 La posición de los pulsos se varía dependiendo de los valores
muestreados de m(t)
Tema V: Modulación Analógica y Digital de Pulsos
5.3.- Modulación de pulsos en
el tiempo (PDM y PPM)
P d
Podemos
variar:
i
A
¾PAM
9 Ti = 0; T0 = constante; A = A[m(nTS)]
¾PDM
0
Ti
TS
t
T0
9 Ti = constante; T0 = T0[m(nTS)]; A = constante
9 Modulamos la anchura de los pulsos
9 También se denomina modulación de anchura de pulsos o
modulación de longitud de pulsos
¾PPM
9 Ti = Ti[m(nTS)]; T0 = constante; A = constante
9 Modulamos el punto de inicio del pulso, es decir, su fase
12
Tema V: Modulación Analógica y Digital de Pulsos
5.3.- Modulación de pulsos en
el tiempo (PDM y PPM)
Las modulaciones
L
d l i
PDM y PPM tienen
ti
mejor
j
comportamiento frente al ruido que la PAM
¾El ruido se superpone en amplitud
Sin embargo, con niveles elevados de ruido
podemos perder toda la información
¾Ef t umbral
¾Efecto
b l
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
Si en un sistema de comunicación enviamos una señal de
variación continua, el ruido hará imposible la recuperación
perfecta del mensaje
Si enviamos una sucesión de estados discretos, el detector
tendrá que decidir qué estado de los posibles se ha enviado
¾ Si las perturbaciones son tales que no confunden al decisor, la
información se recupera de forma perfecta
p
¾ Inconveniente: la discretización de la información es un proceso
inherentemente ruidoso
PCM (Pulse Code Modulation)
¾ Procesos para su generación
9 Muestreo: discretizamos la señal en tiempo
9 Cuantificación: discretizamos la señal en amplitud
9 Codificación: asignamos un código a cada muestra
13
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
Cuantificación
Es el proceso por el cual se transforman valores
continuos de amplitud, muestreados en tiempo
m(nTS), en un conjunto finito y discreto de
amplitudes
x(t)
x̂(t )
Q(x)
⇒ Tenemos N
posibles valores
¾Asumiremos cuantificación sin memoria: la salida en un
instante depende de la entrada en ese instante
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
Una posible función de transferencia
x̂(t )
ymax=y4
⇒ Tenemos 8
posibles salidas
o niveles de
cuantificación
y3
y2
x-max
max=x-44
x-33
x-22
x-11
y1
y-1
x1
x2
x3
x(t)
()
x4=xmax
y-2
y-3
y-4=y-max
14
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
Al cuantificar
tifi la
l señal
ñ l se distorsiona
di t i
¾Rangos continuos transformados en un único valor
¾La degradación es controlable, se puede hacer que sea
inapreciable (CD de audio)
¾Trataremos que la ventaja de poder eliminar el ruido en
p
al inconveniente de degradar
g
la transmisión sea superior
la señal de información
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
Parámetros relevantes en la cuantificación
¾ Margen dinámico
¾ Rango de valores de entrada del cuantificador: [xmax - (-xmax)] = 2xmax
¾ Niveles de cuantificación (L)
¾ Número de niveles en que cuantificamos: L = 2n (n: número de bits)
¾ Escalón de cuantificación ([xi, xi+1])
¾ Ancho de cada intervalo de cuantificación
2 xmax
¾ Si todos son iguales tenemos un “cuantificador uniforme”: Δ =
¾ Posición de los niveles de cuantificación (yi)
L
¾ Valor por el que se cuantifica
¾ Normalmente se asigna el punto medio del intervalo que se cuantifica
15
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
Error en la cuantificación uniforme:
xx̂
e = x − xˆ
x
⇒En el margen dinámico
del cuantificador los
errores están acotados
⇓ Error
e
Δ/2
x̂
…
Error de
saturación
-Δ/2
Error granular
⇒Fuera del margen
dinámico los errores
crecen sin límite
…
Error de
saturación
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
¾Tipos de error
9 Error granular:
Está acotado entre -Δ/2 y Δ/2
Aparece cuando la señal está en el margen dinámico del
cuantificador
9 Error de saturación:
No tiene límite
Aparece al introducir valores fuera del rango
No lo consideraremos, ya que supondremos que las
señales estarán ajustadas al rango dinámico del
cuantificador
16
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
P t i de
Potencia
d error
SNR =
Potencia señal
P
x2
= x = 2
Potencia de ruido del cuantificador Prc e
+∞
− xmax
−∞
−∞
e 2 = ∫ e 2 f e (e )de = ∫
(x − y−max )2 f x (x )dx +
Error
de
E
d saturación
t
ió
+∑∫
k
xk +1
xk
+∞
(x − yk )2 f x (x )dx + ∫x (x − ymax )2 f x (x )dx
max
Error granular
Error de saturación
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
¾Ruido granular
9 Suponemos que la señal se reparte de manera más o menos
homogénea por todos los niveles de cuantificación
9 El error granular se comporta como una variable uniforme
entre ±Δ/2
Δ
Δ
⎧⎪ 1
9 Función densidad de probabilidad: f e (e) = ⎨ Δ ,− 2 ≤ e ≤ 2
⎩⎪ 0 , resto
9 Consideramos la media nula y la potencia de error queda:
σ e2 = E{e2 } = ∫ e2 f e (e)de =
Δ
2
−Δ 2
1 Δ2 2
Δ2
=
e
de
12
Δ ∫−Δ 2
17
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
¾Ejemplo: señal aleatoria a la entrada x(ϑ ) = xmax ⋅ cos(ω0t + ϑ )
Px =
+∞
SNR =
x 2max
2
Δ=
2 xmax ⇒ Cuantificador uniforme
L con L niveles
2
2
Px ∫−∞ x f x (x)dx xmax
2
xmax
2
3
=
=
=
= ⋅ L2
2
2
2
2
Δ 12
Δ 12 4 ⋅ xmax L ⋅12 2
Prc
2
¾También suele expresarse la SNR en función de n: L
L=22n
3
SNR = ⋅ L2 = 3 ⋅ 22n−1
2
(
)
SNR (dB) = 10 ⋅ log 3 ⋅ 22n−1 = 10 ⋅ log 3 + (2n −1) ⋅10 ⋅ log 2 ≈
≈ 1.76 + 6 ⋅ n
(dB)
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
Cuantificación no-uniforme
En la cuantificación uniforme hemos tomado como
hipótesis que la señal se reparte más o menos por
igual en todos los niveles de cuantificación
¾Problema con señales que no se reparten uniformemente
La cuantificación óptima sería aquella que redujese
la potencia de ruido para una señal de entrada
arbitraria
x
2
e 2 = ∑ ∫ (x − yk ) f x ( x)dx
x
k +1
k
k
18
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
E t t i para minimizar
Estrategias
i i i ell error
¾Variar xk e yk en función de x para minimizar el error
⎧ ∂e 2
⎪⎪ ∂x = 0
2
, ∀k
min e = ⎨ k2
xk , yk
⎪ ∂e = 0
⎪⎩ ∂yk
⇒ Esto es bastante complejo
¾Analizar cómo es la señal (tipo de distribución) y
redistribuir la señal para repartirla uniformemente
9 Técnica de compansión
9 Sistema simple y con prestaciones aceptables
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
9 Caso particular para las señales de voz para transmitir por
telefonía
Los niveles de baja intensidad tienen mayor probabilidad
Aparecen niveles altos de intensidad con menor
probabilidad
Laplaciana
Gaussiana
Distribución típica de señales
de voz para telefonía
19
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
Mét d de
Método
d compansión
ió
1) Preprocesar los datos para que se distribuyan de forma
aproximadamente uniforme: C(x)
2) Cuantificar uniformemente: Q(x)
3) Pos-procesar los datos para devolverlos a su estado
( )
inicial: C-1(x)
Cuantificador
C(x)
…
Q(x)
C-1(x)
Receptor
Transmisor
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
¾ Funciones de compansión
Cuantificación uniforme
C(x)
Cuantificación no-uniforme
C(x)
xmax
xmax
ΔC(x)
ΔC(x)
x
Δx
xmax
x
xmax
⇒ Todos los niveles se
tratan igual
Δx
⇒ Expansión de los
niveles más bajos
⇒ ΔC(x) = Δx
⇒ ΔC(x) >> Δx
20
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
¾ Efecto conjunto de expandir y cuantificación uniforme:
¾ Aparecen más niveles para los valores bajos de la señal de
entrada y menos niveles para los valores más altos
x̂(t )
⇒Sentido vertical, L
niveles de altura:
Δ = 2⋅xmax/L
xmax
-xmax
xmax
x(t)
⇒Sentido horizontal,,
cada escalón mide:
Δk, k = 1, 2, …, L
⇒ Por tanto (L↑↑):
dC( x) Δ
≈
dx
Δk
-xmax
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
A áli i de
Análisis
d ruido
id en cuantificación
tifi ió no-uniforme
if
¾ Supondremos que el ruido granular se distribuye
uniformemente en cada uno de los intervalos, ya que
la señal expandida se distribuye de forma más o
menos uniforme por todos los intervalos
⇒ Utilización homogénea de los intervalos de cuantificación
¾ El error para cada intervalo será:
ek2 ≈
Δ2k
12
21
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
¾ Aglutinando todos los intervalos:
Probabilidad de caer
en un intervalo u otro
e2 = ∑
k
dC(x) Δ
≈
dx
Δk
2
xk +1 Δ
Δ2k
k
⋅ P(x ∈ I k ) = ∑ ∫
f x (x)dx =
xk 12
12
k
2
⎡
⎤
⎢ Δ ⎥
⎢ dC(x) ⎥
⎥
⎢
2
xk +1
dx
⎦ f (x)dx = xmax Δ ⋅ f x (x ) dx Potencia de ruido para un
⎣
= ∑∫
x
∫−xmax 12 ⎡ dC(x)⎤ 2 cuantificador no-uniforme
xk
12
k
⎢⎣ dx ⎥⎦
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
R l ió señal
Relación
ñ l a ruido
id
¾ Para cuantificación uniforme:
eCU2 =
P
P
Δ2
⇒ SNRCU = 2x = 2 x
12
eCU Δ 12
¾ Para cuantificación no-uniforme
Δ2 xmax f x (x )
Px
dx ⇒ SNRCNU = 2
⋅∫
2
−
x
x
max
Δ
f x (x)
max
12
⎡ dC(x) ⎤
⋅
dx
⎢⎣ dx ⎥⎦
12 ∫− xmax ⎡ dC(x )⎤ 2
1
⎢⎣ dx ⎥⎦
SNRCNU = SNRCU ⋅ x
f x (x)
max
∫−xmax ⎡ dC(x)⎤ 2 dx
⎢⎣ dx ⎥⎦
2
eCNU
=
22
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
G
Ganancia
i dde compansión
ió
¾ Ganancia en la relación señal a ruido para señales de
entrada con amplitud pequeña
GC2 = lim
x→0
∫
1
f x (x)
xmax
− xmax
⎡ dC( x)⎤
⎢⎣ dx
d ⎥⎦
2
dx
¾ Sólo para valores pequeños: x → 0 ⇒ fx(x) ≈ δ(x)
∫
xmax
− xmax
g (x) ⋅ δ ( x)dx = g (0)
dC(x)
⎡ dC(x) ⎤
⇒ GC ≈
GC2 ≈ ⎢
⎥
dx x=0
⎣ dx ⎦ x=0
2
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
¾ Este parámetro se suele expresar en unidades
logarítmicas
⎡ dC(x ) ⎤
GC (dB) = 20 ⋅ log⎢
⎥
⎣ dx x=0 ⎦
¾ Da una idea de la ganancia en la relación señal a ruido
para señales de entrada con amplitud pequeña
SNRCNU ≈ GC2 ⋅ SNRCU
( x→0 )
SNRCNU (dB) = 20 ⋅ log(GC )+ SNRCU (dB)
( x→0 )
23
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
Di ñ de
Diseño
d la
l función
f ió de
d compansión
ió C(x)
C( )
¾ Objetivo. Queremos independizar la SNRCNU con
respecto a la señal de entrada. Es decir, que la SNRCNU
sea constante en un rango amplio de la señal de
entrada:
SNRCNU =
Px
f x (x)
Δ2 xmax
⋅
dx
12 ∫− xmax ⎡ dC(x )⎤ 2
⎢⎣ dx ⎥⎦
=
∫
xmax
− xmax
x 2 f x (x)dx
Δ2 xmax f x (x )
⋅
dx
12 ∫− xmax ⎡ dC(x) ⎤ 2
⎢⎣ dx ⎥⎦
¾ La condición equivale a que: ⎡⎢ dC(x)⎤⎥ = ⎛⎜ k ⎞⎟
2
⎣ dx ⎦
2
⎝ x⎠
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
dC(x ) k
⎡ dC(x )⎤ ⎛ k ⎞
⎢⎣ dx ⎥⎦ = ⎜⎝ x ⎟⎠ ⇒ dx = x ⇒
xmax
xmax k
xmax
⎛x ⎞
⎟
∫x dC(x) = ∫x x dx = k ⋅ ln x x ⇒ C(xmax ) − C(x) = k ⋅ ln⎜⎝ max
x ⎠
2
2
¾ Por tanto, un compansor ideal debería cumplir:
⎛ x ⎞
⎟⎟
C(x ) = C(xmax ) + k ⋅ ln⎜⎜
⎝ xmax ⎠
9 Esto sería teóricamente, en la práctica no se usa pues:
ln(x) → −∞
x→0
24
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
¾ Para poder usarlo en la práctica,
práctica ponemos ciertas
restricciones a C(x):
1) C(0) = 0
2) C(xmax ) = xmax ⎫
⎬ ⇒ Mantenemos el rango dinámico
C(− xmax ) = − xmax ⎭
3) Que C(x) tenga una forma logarítmica posible para que se
pparezca a la función teórica
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
¾ Funciones prácticas:
9 Ley A (estándar europeo)
⎧ A⋅ x
x
1
⋅ sign(x)
≤
,0 ≤
⎪
xmax A
⎪⎪1 + ln A
⎛ A⋅ x ⎞
C(x ) = ⎨
⎟
1 + ln⎜⎜
⎪
xmax ⎟⎠
x
1
⎝
⎪xmax ⋅
⋅ sign(x ) , ≤
≤1
⎪⎩
A xmax
1 + ln A
9 La función es lineal en un tramo y logarítmica en otro. Los
tramos vienen determinados por el valor de A.
25
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
9 Función de compasión
A=87.5
⇒ Al aumentar A,
aumentamos el carácter
no lineal
A=5
⇒ Valor típico: A = 87.5
xmax C(x)
A=1
xmax
-xmax
x
-xmax
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
9 Ganancia de compasión
GC =
dC( x)
A
=
dx x=0 1 + ln A
Valor típico: A = 87.5
GC
A=87.6
≈ 24.09 dB
Ganancia de compansión para valores pequeños de la
señal
Con señales de amplitud grande la compansión no
mejora la SNRCU, incluso es peor
26
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
SNRCNU y SNRCU para varios valores de L con ley A
x(ϑ ) = B ⋅ sin(ω0t + ϑ )
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
¾ Funciones prácticas:
9 Ley μ (estándar americano)
⎛
x ⎞
⎟
ln⎜⎜1 + μ ⋅
xmax ⎟⎠
⎝
C(x ) = xmax ⋅
⋅ sign(x)
ln(1 + μ )
27
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
9 Función de compasión
μ=255
⇒ Al aumentar μ,
aumentamos el carácter
no lineal
μ=5
⇒ Valor típico: μ = 255
xmax C(x)
xmax
-xmax
x
-xmax
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
9 Ganancia de compasión
GC =
μ
ln(1 + μ )
Valor típico: μ = 255
GC μ =255 ≈ 33.25 dB
Ganancia de compansión para valores pequeños de la
señal
Con señales de amplitud grande la compansión no
mejora la SNRCU, incluso es peor
28
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
SNRCNU y SNRCU para varios valores de L con ley μ
x(ϑ ) = B ⋅ sin(ω0t + ϑ )
GC μ =200 ≈ 31.53 dB
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
Codificación
Los niveles cuantificados son susceptibles de ser
enviados mediante un código
¾El número de bits del código (n) será función del
número de niveles del cuantificador (L): L = 2n
x̂ˆ
y4
y3 10
01
00
y2
y1
11
x
00 → y1
01 → y2
10 → y3
11 → y4
29
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
Modulación delta
Alternativa a la cuantificación
Ahora la cuantificación no es independiente entre
muestras
¾Al muestrear más rápido la diferencia entre las muestras es
menor
¾La señal diferencia tiene un rango dinámico menor que la
señal original ⇒ menos niveles de cuantificación
e(nTS ) = x(nTS ) − x[(n − 1)TS ]
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
Modulación
d l ió delta
d l con dos
d niveles
i l
+Δ
+ Δ → Bit 1
- Δ → Bit 0
-Δ
¾En función de si tenemos un error positivo o negativo
subimos o bajamos un escalón Δ
+ Δ → Bit 1
- Δ → Bit 0
t
¾Así transmitimos un bit por muestra, en lugar de n bits
30
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
¾P iimplementar
¾Para
l
esta modulación
d l ió
9 Transmisor:
x(nTS)
+
-
+
xq[(n-1)TS]
e(nTS)
q(x)
eq(nTS)
xq[(n-1)TS]
+
+ Δ → Bit 1
- Δ → Bit 0
+
+
Retardo TS
xq(nTS)
e(nTS ) = x(nTS ) − xq [(n −1)TS ]
eq (nTS ) = q[e(nTS )]
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
9 Receptor:
R
t
eq(nTS)
+
+
+
xq[(n-1)TS]
LPF
xq(nTS)
Retardo TS
x(nTS ) = x[(n − 1)TS ] + e(nTS )
¾Ventajas de la modulación delta
9 En la cuantificación n bits tienen significado propio
9 En la modulación delta 1 bit tiene significado propio
31
Tema V: Modulación Analógica y Digital de Pulsos
5.4.- Modulación digital de
pulsos (PCM)
Errores en la
l modulación
d l ió delta
d l
¾Error granular:
9 Propio de toda cuantificación: x(nTS)-xq(nTS) ó e(nTS)-eq(nTS)
¾Error de sobrecarga de pendiente
9 Con señales de pendientes muy grandes, la modulación delta
no puede seguir la variación
dx(t ) Δ
9 Existe
E i una limitación
li i ió en su velocidad
l id d de
d variación:
i ió máx
á
≤
dt
TS
t
Tema V: Modulación Analógica y Digital de Pulsos
5.5.- Códigos de línea
Los niveles de cuantificación se direccionan con un
conjunto de dígitos binarios
Esta información binaria (lógica) hay que darle el soporte
de una señal física para que se pueda transmitir
¾ Códigos de línea
Estudiaremos varios tipos
P compararlos
Para
l se recurre a varias
i características:
t í ti
¾ Capacidad de mantenimiento del sincronismo
¾ Existencia de una componente continua (espectro a f = 0)
¾ Ancho de banda
¾ Potencia de transmisión y probabilidad de error
32
Tema V: Modulación Analógica y Digital de Pulsos
5.5.- Códigos de línea
Tipos de códigos de línea
(Non Return to Zero)
Códigos NRZ (Non-Return
UNIPOLAR
A
“1”
POLAR
A
“1”
TS
“0”
TS
“0”
-A
¾Códigos polares más robustos frente al ruido pero se
requiere mayor potencia
Tema V: Modulación Analógica y Digital de Pulsos
5.5.- Códigos de línea
Códigos RZ (Return to Zero)
UNIPOLAR
A
“1”
“0”
POLAR
A
“1”
TS/2
“0”
TS/2
TS
-A
¾Ahora el pulso no está activado todo el periodo de
muestreo
33
Tema V: Modulación Analógica y Digital de Pulsos
5.5.- Códigos de línea
¾Ventajas de los códigos RZ frente a los NRZ:
9 Los códigos RZ tienen capacidad de sincronismo, ya que
mantienen la alineación temporal
9 En caso de que muchos bits sean iguales, con los códigos NRZ
se puede perder el sincronismo
Con los códigos RZ forzamos las transiciones
NRZ
“1”
“1”
“1”
RZ
“1”
“1”
“1”
“1”
“1”
¾Inconvenientes de los códigos RZ: mayor ancho
de banda
Tema V: Modulación Analógica y Digital de Pulsos
5.5.- Códigos de línea
Códigos bipolares
¾Símbolo “0”: A = 0
¾Símbolo “1”: transición de valor ± A
“1”
“1”
“0”
“1”
“0”
“1”
A
-A
TS
¾No aparece componente continua
34
Tema V: Modulación Analógica y Digital de Pulsos
5.5.- Códigos de línea
802 3)
Código Manchester (estándar IEEE 802.3)
¾Símbolo “0”: flanco de bajada
¾Símbolo “1”: flanco de subida
“1”
“0”
A
A
-A
-A
TS
TS
¾No aparece componente continua, capacidad de
sincronismo
Tema V: Modulación Analógica y Digital de Pulsos
5.5.- Códigos de línea
Múltiplex PCM de canales telefónicos
Ejemplo de sistema utilizado en la práctica
Recomendación ITU-T G.732
TDM de 30 canales de voz con ley de compasión
A y codificados con palabras de 8 bits
Canales vocales muestreados a 8 KHz
¾Tasa de cada canal de 64 Kbps
300
3400
f (Hz)
Se selecciona una banda
de frecuencias entre 300 y
3400 Hz, donde la voz es
inteligible
35
Tema V: Modulación Analógica y Digital de Pulsos
5.5.- Códigos de línea
Se multiplexan los 30 canales formando la siguiente trama
de 32 intervalos
0
8 bits
x̂1
x̂2
x̂15
1
2
15
16
x̂16
x̂30
17
31
8 bits
¾ Intervalo 0: información de alineación (cuándo empieza y termina
la trama)
¾ Intervalo 16: información de señalización
Régimen binario total: Rs = 32 ⋅ 64 Kbps = 2048 Kbps
36
TEORÍA DE LA COMUNICACIÓN
CUESTIONES TEMA 5
MODULACIÓN ANALÓGICA Y DIGITAL DE PULSOS
1.- ¿Qué se entiende por muestreo? ¿Cuál es su expresión en el dominio del tiempo y en el
dominio de la frecuencia?
2.- Enunciar el teorema de muestreo.
3.- ¿Qué es interpolar una señal? ¿Cómo se reconstruye la señal original a partir de sus
muestras?
4.- ¿Qué se tiene que cumplir para que no haya pérdida de información en las muestras de
una señal respecto a la señal original?
5.- ¿Cómo se puede ver en el dominio de la frecuencia la reconstrucción de una señal a
partir de sus muestras?
6.- ¿En qué consiste el aliasing y qué dos procesos se pueden hacer para evitarlo?
7.- Deducir la señal PAM en el dominio del tiempo y la frecuencia.
8.- ¿Qué dos procesos intervienen en la generación de la señal PAM?
9.- Explicar las tres posibilidades de detectar la señal de información m(t) a partir de la
señal PAM s(t).
10.- ¿En qué consiste la multiplexación por división en el tiempo (TDM)?
11.- Explicar las modulaciones de pulsos en el tiempo: PDM y PPM.
12.- ¿Cómo se comportan las modulaciones PDM y PPM frente al ruido en comparación a
la modulación PAM?
13.- ¿En qué consiste el proceso de cuantificación? ¿Qué parámetros caracterizan a un
cuantificador?
14.- ¿Qué tipos de errores existen en el proceso de cuantificación?
15.- ¿Por qué son necesarios los cuantificadores no uniformes? ¿En qué consisten y cómo
se implementan en la práctica?
16.- Deducir la relación existente entre la SNR para cuantificadores uniformes y
cuantificadores no uniformes.
17.- ¿Qué es la ganancia de compansión?
18.- Deducir la expresión que debe cumplir un compansor ideal.
19.- ¿Qué proceso realiza el codificador tras el cuantificador?
20.- Explicar la modulación delta. Indicar las ventajas de esta modulación.
21.- ¿Cómo se implementa en la práctica la modulación delta en transmisión y recepción?.
Mostrar los diagramas de bloque.
22.- Explicar los tipos de errores de la modulación delta.
23.- ¿Qué son los códigos de línea?. Citar algunos ejemplos. ¿Cuáles son las
características deseables de un código de línea?
24.- Explicar el sistema utilizado en la práctica: multiplex PCM de canales telefónicos
(recomendación ITW-T G-732).
TEORÍA DE LA COMUNICACIÓN
PROBLEMAS TEMA 5
MODULACIÓN ANALÓGICA Y DIGITAL DE PULSOS
1.- Las señales: g1(t) = 10⋅cos(100πt), y: g2(t) = 10⋅cos(50πt), se muestrean a una tasa de 75
muestras por segundo. Demostrar que las muestras de ambas señales son iguales, y explicar
la causa.
2.- La señal: g1(t) = 10⋅cos(60πt)⋅cos2(160πt), se muestrea a una tasa de 400 muestras por
segundo. Determine cuál es el rango de posibles frecuencias de corte para un filtro de
reconstrucción ideal.
3.- Sea E la energía de una señal estrictamente limitada en banda, g(t). Mostrar que E puede
expresarse en términos de las muestras de g(t), tomadas a la frecuencia de Nyquist, según la
expresión:
1 +∞ ⎛ n ⎞
E=
⋅ ∑ g⎜
⎟
2w n = −∞ ⎝ 2w ⎠
2
donde w es el ancho de banda de g(t).
4.- Se crea un múltiplex por división en el tiempo de 24 señales vocales, muestreadas
mediante pulsos de anchura 1 μs. El múltiplex incluye un pulso adicional (que se empleará
para sincronización de trama) de la misma duración que los anteriores. Considere que la
componente de frecuencia más elevada en la señal vocal es de 3.4 KHz
a) Considerando una frecuencia de muestreo de 8 KHz, calcule el espacio entre dos
pulsos consecutivos en la señal múltiplex.
b) Repita los cálculos para una frecuencia de muestreo igual a la de Nyquist.
5.- Deducir el espectro de una señal PAM generada por una señal moduladora: m(t) =
Am⋅cos(2πfmt), suponiendo un factor de modulación: μ = Ka⋅Am < 1, una frecuencia: fm =
0.25 Hz, un período de muestreo: Ts = 1 s, y una duración para el pulso base: T = 0.45 s.
Tener en cuenta que la señal generada se puede representar por la siguiente expresión:
s (t ) = ∑ [1 + K a ⋅ m(n ⋅ Ts )] ⋅ g (t − n ⋅ Ts )
n
Utilizando un filtro de reconstrucción ideal, dibujar el espectro a la salida del filtro.
Compare este resultado con el que se obtendría si el pulso base tuviera una duración
prácticamente nula.
6.- La señal: m(t) = 6⋅sen(2πt), se transmite utilizando un esquema PCM. El cuantificador
empleado es de tipo Mid-Riser, con un tamaño de escalón unidad. Dibuje la señal
resultante del proceso de cuantificación para un ciclo completo de la señal de entrada.
Suponga que la frecuencia de muestreo es de 4 muestras por segundo, muestreándose en
los instantes: t = ± 1/8, ± 3/8, ± 5/8, …
7.- La función de densidad de probabilidad de las muestras de una señal es: fX(x) = 4⋅e-8⋅⎪x⎜.
Esta señal se aplica a un cuantificador de 4 niveles cuyo margen dinámico es ± 1 voltio.
Calcule el valor cuadrático medio del error, distinguiendo los términos granular y de
saturación. Compare con el valor del error obtenido en el caso en que la señal sea uniforme
en el margen dinámico del cuantificador.
8.- Considere la ley de compansión μ. Demuestre que para L grande se cumple:
Δ
a) max ≈ 1 + μ
Δ min
L
⎧
, si x es grande
⎪
x ⎪ 2 ⋅ ln (1 + μ )
≈⎨
b)
L⋅μ ⋅ x
Δk ⎪
, si x es pequeña
⎪⎩ x max ⋅ 2 ⋅ ln (1 + μ )
9.- Se dispone de un codificador PCM de 8 bits, con margen dinámico ± 1 voltio. Se aplica
a dicho codificador muestras de la señal, de valores: 1.117314, 0.086726 y 0.714236. En la
cuantificación uniforme de tipo MID-RISER los niveles positivos se numeran del 0 al
L
− 1 , con el bit más significativo a 0. Los negativos se numeran de forma equivalente,
2
salvo el bit más significativo, que se fija a 1.
a) Indique para cada muestra su nivel de cuantificación, los errores absoluto y
relativo y la palabra código correspondiente.
b) Repita los cálculos en el caso de realizar una compansión con ley A (A = 87.6).
10.- Para evaluar un codificador Delta-Lineal se utiliza un tono de prueba normalizado de
frecuencia fm. Si la transmisión en línea se efectúa a cuatro niveles: A, B, C y D, y al receptor
llega el mensaje: ABCBBDDBACA, se pide:
a) Secuencia de dígitos binarios enviada.
b) Dibuje la forma de onda recuperada.
c) Obtenga la máxima frecuencia del tono para que este cuantificador pueda ser
utilizado.
Considere que: Δ = 0.1 voltios, que un cero lógico equivale a una bajada de tamaño Δ, que
un uno lógico equivale a una subida de tamaño Δ, A = 01, B = 00, C = 10, D = 11, y que el
régimen de símbolos es RS = 50300 símbolos/s.
11.- Un múltiplex PCM tiene un caudal de 354 Kbps y está constituido por 14 canales de
información, más uno de señalización. El régimen binario de este último es de 1200 bps.
Cada canal PCM es la salida de un conversor analógico-digital con cuantificación uniforme
de tipo Mid-Riser, y margen dinámico de entrada de ± 2 voltios. El número de niveles de
cuantificación (L) es el apropiado para que la SNR de cuantificación de una sinusoide de
amplitud 2 voltios sea igual a 38 dB. Los niveles positivos se numeran del 0 al L − 1 , con el
2
bit más significativo a 0. Los negativos se numeran de forma equivalente, salvo el bit más
significativo que se fija a 1. Si las señales analógicas se muestrean a 1.4 veces la frecuencia
de Nyquist, determine:
a) El número de niveles de cuantificación (ajuste a la potencia de 2 más cercana).
b) El ancho de banda máximo aceptable de las señales analógicas.
Se incluye un compasor de ley A, cuya ganancia de compansión es igual a 23.44 dB. Se
pide:
c) Calcular las palabras código correspondientes a las muestras con amplitudes: z1 =
-0.0018 V y z2 = 1.325 V.
d) Calcular el rango de valores de entrada correspondientes al nivel de
cuantificación positivo 8.
TEORÍA DE LA COMUNICACIÓN
SOLUCIONES DE LOS PROBLEMAS TEMA 5
MODULACIÓN ANALÓGICA Y DIGITAL DE PULSOS
1. Es una demostración, hay que darse cuenta de que g1(t) está muestreada por debajo de
la frecuencia de Nyquist.
2. 190 Hz < f CORTE < 210 Hz
3. Es una demostración.
4.
a) ∆T = 4 µs
b) ∆T = 4.88 µs
5.
1 +∞
µ
S ( f ) = T ⋅ sin c( f ⋅ T ) ⋅ exp (− j πfT ) ⋅ ⋅ ∑ δ ( f − n ⋅ f s ) + ⋅ [δ ( f − f m − n ⋅ f s ) + δ ( f + f m − n ⋅ f s )]
TS n =−∞
2
El espectro a la salida del filtro quedaría:
Cuando T → 0, el espectro a la salida del filtro sería:
Cuando T → 0: T ' = T ⋅ sin c( f ⋅ T ) ⋅
T’ ≈ T (TS = 1 s)
6. Señal resultante del proceso de cuantificación.
1
1
TS
7. Error de cuantificación para una señal de entrada con función densidad de
probabilidad Laplaciana: f X (x ) = 4 ⋅ e −8⋅ x
e 2 = e g2 + es2 = 0.028 + 5.2 ⋅10 −4 + 5.2 ⋅ 10 −5 ≈ 0.029
Error granular
Error de
saturación
Error de cuantificación para una señal de entrada con función densidad de
probabilidad con distribución uniforme (ahora sólo hay error granular).
e 2 = e 2g ≈ 0.02
8.
9.
Son unas demostraciones.
a)
x
1.117314
0.086726
0.714236
x̂
0.99609
0.08984
0.71484
Nivel
127
11
91
ErrorABS
0.1212
0.0031
6⋅10-4
ErrorREL
10.85 %
3.6 %
0.085 %
Palabra código
01111111
00001011
01011011
b)
x
1.117314
0.086726
0.714236
C(x)
Nivel
x̂
1
127
0.99609
0.55324
70
0.55078
0.938506 120 0.941460
C-1 (x)
0.9789
0.08556
0.72566
ErrorABS
0.1384
1.16⋅10-3
0.01143
ErrorREL
12.38 %
1.33 %
1.6 %
10.
a)
A
01
B
00
C
10
B
00
B
00
D
11
D
11
b)
c) fmax ≈ 800.5 Hz
11.
a) L = 64
b) fmax = 1500 Hz
c) z1 = -0.0018 V ⇒ Palabra código: 100000
z2 = 1.325 V ⇒ Palabra código: 011101
2
B
00
A
01
C
10
A
01
Palabra código
01111111
01000110
01111000
d) Rango de valores de entrada al nivel de cuantificación 8:
x 8min = 0.0353
⇒ [0.0353, 0.0414]
x 8max = 0.0414
3
UNIVERSIDAD DE VALLADOLID
E.T.S. INGENIEROS DE TELECOMUNICACIÓN
TEORÍA DE LA COMUNICACIÓN
Tema 6: Transmisión digital banda base
Teoría de la Comunicación - Curso 2010-2011
TEMA VI. Transmisión digital
en banda base
6.1.-Interferencia entre símbolos
6.2.-Criterios de decisión
6.3.-Filtro adaptado
6.4.-Decisión mediante umbral. Cálculo de la
probabilidad de error
Tema VI: Transmisión Digital en Banda Base
Introducción
En el tema anterior estudiamos técnicas para
convertir información analógica en información
digital
Muestreo + Cuantificación + Codificación
En este tema estudiaremos la transmisión digital
de datos a través de un canal banda base
Habrá dos fuentes principales de error
Ruido
¾ Inherente al canal
¾ En sistemas digitales puede combatirse su efecto por completo
¾ También puede equivocarse: hay una probabilidad de error
Interferencia entre símbolos (ISI)
¾ Debido a que un símbolo puede estar afectado por símbolos
adyacentes
1
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
Esq ema de unn sistema digital banda base
Esquema
…
Transmisor
ak
Datos
binarios
Conversor
de formato
Canal
Receptor
…
y(t)
s(t)
…
g(t)
h(t)
+
c(t)
Filtro
TS
Decisor
âk
ω(t) receptor
Pulso que
tomamos como
forma básica
Ruido
AWGN
s(t ) = ∑ ak ⋅ g (t − kTS )
k
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
No confundir el envío de bits con el envío de
símbolos ⇒ se envían símbolos
¾Los símbolos pueden tener tantos bits como deseamos
Símbolos de 1 bit → 2 niveles
Símbolos de 2 bits → 4 niveles
Símbolos de n bits → 2n niveles
¾Hay que diferenciar
¾ Tiempo de duración de 1 bit: Tb
¾ Tiempo de duración del símbolo
¾ Símbolos 1 bit: TS = Tb
¾ Símbolos 2 bits: TS = 2Tb
2
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
El transmisor emite la señal: s(t ) = ∑ ak ⋅ g (t − kTS )
k
Señal a la salida del filtro receptor:
y (t ) = s (t ) ∗ h(t ) ∗ c(t ) + ω (t ) ∗ c(t )
Agrupamos: p(t ) = g (t ) ∗ h(t ) ∗ c(t )
n(t ) = ω (t ) ∗ c(t )
Obtenemos: y(t ) = ∑ ak ⋅ p(t − kTS ) + n(t )
k
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
Muestreamos para ddecidir
M
idi quéé símbolo
í b l recibimos
ibi
en cada
d
instante iTS:
y (iT ) = a ⋅ p(iT − kT ) + n(iT ) =
S
∑
k
S
S
S
k
= ai ⋅ p(0 ) + ∑ ak ⋅ p[(i − k )TS ] + n(iTS )
k ≠i
ISI
¾ En el sumatorio reside la interferencia entre símbolos ((ISI),
), yya qque
si los p[(i-k)TS] no son nulos, se estarán superponiéndose al
símbolo i
¾ No tendremos ahora presente el efecto del ruido, por lo que la
expresión a la entrada del decisor quedaría:
y (iTS ) = ai ⋅ p(0) + ∑ ak ⋅ p[(k − i )TS ]
k ≠i
3
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
Teóricamente
T
ói
se puede
d eliminar
li i
la
l ISI sii se cumple:
l
cumple:
⎧1
p(mTS ) = ⎨
⎩0
m=0
m≠0
¾ De esta manera al muestrear no tienen influencia el resto de los
símbolos
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
En el dominio de la frecuencia
pδ (t ) = p(t ) ⋅ δ TS (t ) = p(t ) ⋅ ∑ δ (t − mTS ) = ∑ p(mTS ) ⋅ δ (t − mTS )
m
m
1
Pδ ( f ) = ⋅ ∑ P( f − mf S ) = ∑ p(mTS ) ⋅ e − j 2πmfTS
TS m
m
¾Para m = 0 es la única muestra que debe tener
aportación
Pδ ( f ) =
1 +∞
⋅ ∑ P( f − mf S ) = 1
TS m =−∞
9 Este es el criterio para evitar la interferencia entre símbolos
9 Los filtros que cumplan esta condición pueden eliminar la ISI
4
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
¾Ej
¾Ejemplo
l 1:
1 filtro
fil paso bajo
b j ideal,
id l w = fS/2
P(f) T
S
f
-fS/2
Pδ ( f ) =
fS/2=w
1 +∞
⋅ ∑ P( f − mf S ) = 1
TS m =−∞
⎛ t
9 En el dominio del tiempo: p(t ) = sinc⎜⎜
⎝ TS
⎞
⎟⎟ = sinc(t ⋅ f S ) = sinc(2 wt )
⎠
⎧1
p(mTS ) = ⎨
⎩0
m=0
m≠0
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
9 La
L señal
ñ l a la
l entrada
t d del
d l decisor
d i es:
y (t ) = ∑ ak ⋅ p(t − kTS )
k
9 Si muestreamos justo cada TS segundos, en cada instante
conseguimos recuperar el valor del pulso adecuado
Al muestrear en t = 0, sólo tenemos la contribución de a0
Al muestrear en t = TS sólo tenemos la contribución de a1 ...
5
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
¾Ej
¾Ejemplo
l 2:
2 señal
ñ l triangular,
i
l w = fS
P(f)
TS
Pδ ( f ) =
f
-fS
1 +∞
⋅ ∑ P( f − mf S ) = 1
TS m =−∞
fS=w
0
Pδ(f)
TS
f
-2fS
-fS
fS=w
0
2fS
9 En relación al ejemplo anterior el ancho de banda es el doble
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
¾Fil
¾Filtros
de
d coseno alzado
l d (raised
(
d cosine))
9 Familia paramétrica de filtros que cumplen la condición
impuesta para evitar la ISI
⎧ 1
,0 ≤ f ≤ f1
⎪ 2w
⎪
⎡ π ( f − w)⎤ ⎫⎪
⎪ 1 ⎧⎪
⋅ ⎨1 − sen ⎢
P( f ) = ⎨
⎥ ⎬ , f1 ≤ f ≤ 2 w − f1
⎣ 2 w − 2 f1 ⎦ ⎪⎭
⎪ 4 w ⎪⎩
⎪0
, resto
⎪
⎩
w=
R
1
= S
2TS
2
RS: Régimen o tasa de símbolos
6
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
9 Ancho
A h dde bbanda
d dde ttransmisión:
i ió
BT = 2 w − f1 = w(1 + α ) ⇒ α = 1 −
f1
w
9 Parámetros de la familia
f1: frecuencia a partir de la cual comienza a caer el filtro
α (‘Factor de redondeo o rolloff’): representa el exceso de
ancho de banda frente a la banda mínima necesaria
0 ≤ α ≤1
α = 0 ⇒ Filtro ideal
α ↑↑ ⇒ Se ocupa más ancho de banda
⇒ Disminuye la amplitud de los lóbulos secundarios
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
9 Dominio
D i i de
d la
l frecuencia:
f
i filtros
filt de
d coseno alzado
l d
α=0
α = 0.5
α=1
7
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
cos(2παwt )
1 − 16α 2 w2t 2
α = 0 ⇒ p(t ) = sin c(2wt )
p(t ) = sin
i c(2wt ) ⋅
9 Dominio
D i i del
d l tiempo:
ti
α ↑↑
⇒Se ocupa más ancho
de banda
⇒Disminuye la
amplitud de los lóbulos
secundarios
⇒Menor sensibilidad
frente a pequeños
errores en el muestreo
α = 0.8
α=0
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
Comentarios al criterio de eliminación de la ISI
¾ La
L solución
l ió anterior
t i es ideal,
id l ya que ell canall h(t)
h( ) es incontrolable
i
t l bl
p(t ) = g (t ) ∗ h(t ) ∗ c(t )
9 ⇒p(t) no podrá ser perfecto para evitar la ISI
¾ Solución práctica: “ecualización” o “igualación”
y(t)
…
c(t)
Ecualizador
TS
Decisor
âk
Filtro
receptor
9 Se estudian las interferencias entre símbolos vecinos con una señal de
referencia
8
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
¾Di
¾Diagrama
de
d bloques
bl
de
d un ecualizador
li d para cancelar
l ISI
a’k-2
Retardo
TS
ω1
Referencia
TS
a’k-1
TS
ω2
a’k
TS
ω3
Comparador
a’k+
1
TS
ω4
a’k+
2
ω5
Salida âk
Error
Tema VI: Transmisión Digital en Banda Base
6.1.- Interferencia entre
símbolos
9 Tenemos
T
un conjunto
j t de
d muestras
t vecinas
i
que procesamos de
d
forma conjunta y comparamos con la referencia
Se obtiene una señal de error
En función del error se varían los pesos (ωi) para que éste
vaya disminuyendo
⇒Ajustamos p(t)
9 Necesitamos una referencia
Información de sincronismo que se envía con la
información vocal
9
Tema VI: Transmisión Digital en Banda Base
6.2.- Criterios de decisión
El sistema
it
decisor
d i tiene
ti
que disponer
di
de
d una
herramienta para decidir cuál de los M símbolos
posibles se ha enviado a partir de una observación
ruidosa y
H0
H1
M
→ y → Di
H M −1
¾Hay que decidir cuál de las posibles hipótesis Hi ha
generado la observación y: Di
¾Se recurre a los test de hipótesis
Tema VI: Transmisión Digital en Banda Base
6.2.- Criterios de decisión
¾Hi ót i binarias
¾Hipótesis
bi i
H0 → “1”
H1 → “0”
¾Hipótesis múltiples
-A
A
H0 → “00”
A/2
H1 → “01”
A
H2 → “10”
-A
H3 → “11”
-A/2
¾Vamos a plantear varios criterios para tomar estas
decisiones
Supondremos hipótesis binarias
10
Tema VI: Transmisión Digital en Banda Base
6.2.- Criterios de decisión
Criterio de Bayes
y
Trata de tomar decisiones de forma que se
minimice el riesgo medio en las decisiones
Concepto de riesgo
¾Asociado a cada una de las hipótesis: RH y RH
¾Los riesgos se definen a partir de los costes de las
decisiones acertadas o falladas
0
1
Cij: Coste asociado a la decisión i cuando es cierta la
hipótesis j
C00
H0
D0
H1
D1
C11
Tema VI: Transmisión Digital en Banda Base
6.2.- Criterios de decisión
¾Riesgos asociados a cada hipótesis
(
H0
)+ C ⋅ p(D )
(
H1
)+ C ⋅ p(D )
RH 0 = C00 ⋅ p D0
RH1 = C01 ⋅ p D0
10
¾Definición de riesgo:
¾Terminología
11
1 H0
1 H1
R = RH 0 ⋅ p (H 0 ) + RH1 ⋅ p(H1 )
⎧ p (H 0 )
⎨
⎩ p (H1 )
⎧f y
Funciones de verosimilitud ⎪ Y H 0
⎨
⎪⎩ fY y H1
Probabilidades a posteriori ⎧ p (H 0 y )
⎨
⎩ p(H1 y )
Probabilidad a priori
( )
( )
11
Tema VI: Transmisión Digital en Banda Base
6.2.- Criterios de decisión
El criterio de Bayes trata de minimizar el riesgo
medio
¾Trata de definir una frontera de decisión que
minimice el riesgo medio
( )
( )
H0
fY y H 0 > p(H1 ) ⋅ [C01 − C11 ]
fY y H1 < p(H 0 ) ⋅ [C10 − C00 ]
H1
¾Es de notar que el umbral para decidir H0 aumenta:
Cuanto más probable sea H1 ( ↑ p(H1))
Cuanto mayor sea el coste asociado a decidir “0” cuando
sea cierto “1” (↑ C01)
Tema VI: Transmisión Digital en Banda Base
6.2.- Criterios de decisión
Criterio de máximo a pposteriori ((MAP))
Compara las probabilidades a posteriori y se
selecciona la hipótesis que maximiza la
probabilidad a posteriori
p (H 0 y )
p(H 0 y ) =
p(H1 y ) =
( )
H0
>
<
p (H1 y )
H1
fY y H 0 ⋅ p (H 0 )
fY ( y )
( )
f Y y H1 ⋅ p ( H 1 )
fY ( y )
⇒
( )
( )
H0
f Y y H 0 > p (H1 )
f Y y H1 < p ( H 0 )
H1
Caso particular del
criterio de Bayes
cuando:
[C01-C11] = [C10-C00]
12
Tema VI: Transmisión Digital en Banda Base
6.2.- Criterios de decisión
Criterio de máxima verosimilitud ((ML))
Compara las funciones de verosimilitud y
escoge la hipótesis que maximiza la función de
verosimilitud
H0
( ) <> f (y )
fY y H 0
Y
H1
H1
⇒
( )
( )
H0
fY y H 0 >
1
f Y y H1 <
Caso particular del criterio de Bayes
cuando:
p (H ) = p (H )
⎧
1
0
⎨
[
]
[
C
C
C
C00 ]
−
=
−
11
10
⎩ 01
H1
Tema VI: Transmisión Digital en Banda Base
6.3.- Filtro adaptado
Esquema del receptor
y(t)
s(t)
Canal …
+
c(t)
k ⋅ TS
Decisor
âk
Filtro
ω(t) receptor
Ruido AWGN
− Media nula
− Sω ( f ) =
N0
2
Objetivo: diseñar c(t) con un criterio de ruido
¾No confundir con la cancelación de ISI, donde se diseña
g(t) para que se cumplan las condiciones de eliminar ISI
p(t ) = g (t ) ∗ h(t ) ∗ c(t )
13
Tema VI: Transmisión Digital en Banda Base
6.3.- Filtro adaptado
Diseño de c(t) con un criterio de ruido
¾Intentar maximizar la SNR a la entrada del “decisor”
para facilitar la decisión
y (t ) = s (t ) ∗ c(t ) + ω (t ) ∗ c(t )
y (t ) = g 0 (t ) + n(t )
¾A la entrada del muestreador:
SNR m =
¾A la entrada del decisor:
SNR d =
Pg 0
Pn
Pg 0 (TS )
Pn (TS )
=
g 0 (TS )
n(TS )
2
2
Tema VI: Transmisión Digital en Banda Base
6.3.- Filtro adaptado
9 Luego:
SNR d =
Pg 0 (TS )
Pn (TS )
=
g 0 (TS )
n(TS )
2
2
=
∫
+∞
−∞
S ( f ) ⋅ C ( f ) ⋅ e j 2πfTS df
n(TS )
2
2
Hay que maximizar la SNR|d
Aplicamos la desigualdad de Schwarz:
∫
+∞
−∞
2
+∞
+∞
φ1 (x ) ⋅ φ2 ( x )dx ≤ ∫ φ1 (x ) dx ⋅ ∫ φ2 (x ) dx
−∞
2
2
−∞
14
Tema VI: Transmisión Digital en Banda Base
6.3.- Filtro adaptado
El numerador de la SNR|d estará acotado según la
expresión anterior, alcanzándose la cota cuando se
produce la igualdad de factores:
φ1 (x ) = k ⋅ φ2* (x )
Por tanto, para maximizar la SNR|d:
C ( f ) = k ⋅ S * ( f ) ⋅ e − j 2πfTS ⇔ c(t ) = k ⋅ s * (TS − t )
g * (t ) ⇔ G * (− f )
Tema VI: Transmisión Digital en Banda Base
6.3.- Filtro adaptado
k=1
¾F
¾Forma
dde c(t)
()
c(t) = k ⋅ s*(TS-t) = s*(TS-t)
s(t)
⇒
A
A
t
0
t
TS
0
TS
9 Se
S convolucionan:
l i
s(t)
(t) ∗ c(t)
(t)
A
0
t T
S
t
⇒ El mayor encaje (máximo valor de la
convolución) se da cuando: t = TS
⇒ Se maximiza la contribución de la señal
en los valores muestreados
15
Tema VI: Transmisión Digital en Banda Base
6.3.- Filtro adaptado
¾E
¾Esquema
del
d l filtro
fil adaptado
d
d c(t)
()
y(t)
k ⋅ s*(TS - t)
s(t)
Decisor
TS
âk
9 Es equivalente a un correlador (a la entrada del decisor)
s(t)
∫
×
TS
0
dt
Decisor
TS
âk
c(t)
9 El receptor puede recibir varios pulsos
⇒ c(t) para estos pulsos es el mismo: c(t ) = k ⋅ s * (TS − t )
⇒ El filtro está adaptado a la forma del pulso con
con independencia de su polaridad
A
-A
Tema VI: Transmisión Digital en Banda Base
6.4.- Decisión mediante umbral.
Cálculo de la probabilidad de error
Esquema del receptor
y(t)
s(t)
Canal …
+
ω(t)
Decisor:
c(t)
y
k ⋅ TS
Decisor
âk
Ruido AWGN
− Media nula
− Sω ( f ) =
N0
2
¾Cálculo del umbral de decisión (λ)
9 Depende del criterio seleccionado
¾Hay una probabilidad de error asociada a λ
9 p(e) ≡ BER (Bit Error Rate)
16
Tema VI: Transmisión Digital en Banda Base
6.4.- Decisión mediante umbral.
Cálculo de la probabilidad de error
Cálculo del umbral de decisión
¾Supongamos que tenemos un código polar NRZ y filtro
c(t)
adaptado
“1”
“0”
A
t
0
1/TS
0
TS
t
TS
0
-A
TS
c(t ) = k ⋅ s * (TS − t )
y = y (TS ) = [s (t ) ∗ c(t ) + ω (t ) ∗ c(t )]t =TS
y=
1 TS
1 TS
⋅ ∫ (± A)dt + ⋅ ∫ ω (t )dt
0
TS
TS 0
Tema VI: Transmisión Digital en Banda Base
6.4.- Decisión mediante umbral.
Cálculo de la probabilidad de error
¾R ibi
¾Recibiremos:
9 Hay que calcular un umbral de
decisión (λ), de modo que amplitudes
superiores correspondan a un “1” y
amplitudes inferiores a un “0”
¾Decidimos sobre la variable y
A
-A
9 ¿q
¿qué es yy…?
y H0 = − A +
1 TS
⋅ ω (t )dt
TS ∫0
y H1 = + A +
1 TS
⋅ ω (t )dt
TS ∫0
9 y es una variable aleatoria gaussiana
ω(t) es la realización de un proceso estocástico gaussiano
17
Tema VI: Transmisión Digital en Banda Base
6.4.- Decisión mediante umbral.
Cálculo de la probabilidad de error
9 Caracterización
C
t i ió de
d y (variable
( i bl aleatoria
l t i gaussiana)
i )
Media:
E Y H0 = − A
{ }
E {Y }= + A
H1
Varianza:
σ
2
Y
H0
σ Y2
H1
⎧
= E ⎨⎛⎜ Y
⎩⎝
H0
⎧
= E ⎨⎛⎜ Y
⎩⎝
H1
{[
2
⎫
− mY ⎞⎟ ⎬ = E Y
H0 ⎠
⎭
− (− A)
H1
− (+ A)
{[
2
⎞⎟ ⎫ = E Y
⎬
H1 ⎠
⎭
− mY
]}
H0
2
⎧⎪⎡ 1
= E ⎨⎢
⎪⎩⎣ TS
∫
0
] }= E ⎪⎨⎡⎢T1 ∫
2
⎧
⎪⎩⎣
S
TS
TS
0
⎤
ω (t )dt ⎥
⎦
2
⎫⎪
⎬
⎪⎭
2
⎤ ⎫⎪
ω (t )dt ⎥ ⎬
⎦ ⎪⎭
Tema VI: Transmisión Digital en Banda Base
6.4.- Decisión mediante umbral.
Cálculo de la probabilidad de error
σ Y2
H0
= σ Y2
H1
⎧⎪⎡ 1
= E ⎨⎢
⎪⎩⎣ TS
∫
TS
0
2
⎤ ⎫⎪
ω (t )dt ⎥ ⎬ =
⎦ ⎪⎭
1
TS2
TS
TS
0
0
∫ ∫
E{ω (t1 ) ⋅ ω (t 2 )}dt1dt 2
Rω (t1 − t 2 ) =
σ 2 = σ Y2
Y
H0
= σ Y2
=
H1
N0
⋅ δ (t1 − t 2 )
2
N
1 N0
⋅
⋅ TS = 0
2
TS 2
2TS
Luego:
(
)
(
)
y H 0 → N − A, σ Y2
y H1 → N + A, σ Y2
18
Tema VI: Transmisión Digital en Banda Base
6.4.- Decisión mediante umbral.
Cálculo de la probabilidad de error
¾Frontera de decisión (apartado 6.2)
9 Según el criterio bayesiano:
( )
( )
H0
fY y H 0 > p(H1 ) ⋅ [C01 − C11 ]
p(H1 ) ⋅ [C01 − C11 ]
⇒ λBAYES =
(
)
(H 0 ) ⋅ [C10 − C00 ]
p
H
⋅
[
C
−
C
]
p
f Y y H1 <
0
10
00
H1
9 Según el criterio MAP
( )
( )
H0
f Y y H 0 > p (H 1 )
p (H 1 )
⇒ λMAP
A =
p (H 0 )
f Y y H1 < p (H 0 )
H1
9 Según el criterio ML
( )
( )
H0
fY y H 0 >
1 ⇒ λML = 1
f Y y H1 <
H1
Tema VI: Transmisión Digital en Banda Base
6.4.- Decisión mediante umbral.
Cálculo de la probabilidad de error
¾O
¾Operamos
para ddespejar
j y:
( )= σ
f (y )
fY y H 0
Y
H1
−
1
2π
Y
1
σ Y 2π
⋅e
( y + A )2
2σ Y2
−
−
⋅e
( y − A )2
=e
(
y 2 + A2 + 2 Ay − y 2 + A2 − 2 Ay
)
2σ Y2
2σ Y2
−
=e
⎧λBAYES
⎪
λi ⎨ λMAP
< ⎪
H1
⎩ λML
2 Ay H 0
σ Y2
>
9 Tomamos
T
logaritmos:
l
it
H0
H0
H1
H1
< σY
2 Ay >
− 2
ln λi ⇒ y −
ln λi
σY <
> 2A
2
Umbral sobre la
λ’ ⇒ observación ‘y’
19
Tema VI: Transmisión Digital en Banda Base
6.4.- Decisión mediante umbral.
Cálculo de la probabilidad de error
9 Caso
C
particular
ti l para ell criterio
it i ML (λML = 1)
C01 − C11
p(H1 ) = p(H 0 );
=1 ⇒
C10 − C00
H0
y
<
>
0
H1
A
0
⇒
Menor que cero ⇒ “0”
Mayor que cero ⇒ “1”
-A
Tema VI: Transmisión Digital en Banda Base
6.4.- Decisión mediante umbral.
Cálculo de la probabilidad de error
Cálculo de la probabilidad de error
¾Nos fijamos en las funciones de verosimilitud
( )
p(e ) = p(H ) ⋅ p(y < λ ')+ p(H ) ⋅ p(y
( )
p(e ) = p e H1 ⋅ p(H1 ) + p e H 0 ⋅ p(H 0 )
1
H1
0
H0
> λ'
)
⇒ El error aparece
representado como el
área rayada debajo de
las curvas
20
Tema VI: Transmisión Digital en Banda Base
6.4.- Decisión mediante umbral.
Cálculo de la probabilidad de error
¾E
¾Expresión
ió generall para calcular
l l ell error
−
λ'
1
−∞
σ Y 2π
p(e ) = p(H1 ) ⋅ ∫
( y − A )2
⋅e
+∞
dy + p(H 0 ) ⋅ ∫
2σ Y2
−
1
σ Y 2π
λ'
⋅e
¾Caso particular: criterio ML
( y + A )2
2σ Y2
dy
p (H1 ) = p (H 0 )
9 Símbolos equiprobables: ⎧
<
⎨
⇒ y 0
9 Costes iguales
g
:
>
⎩[C01 − C11 ] = [C10 − C00 ]
H0
H1
( ) ( )
p e H1 = p e H 0 = p
1
p (H 1 ) = p (H 0 ) =
2
⇒
( ) ( )
1
1
p(e ) = p ⋅ + p ⋅ = p ⇒ p(e ) = p e H1 = p e H 0
2
2
Tema VI: Transmisión Digital en Banda Base
6.4.- Decisión mediante umbral.
Cálculo de la probabilidad de error
( )
9 Calculamos:
C l l
p e H0 = ∫
+∞
0
1
σ Y 2π
−
( y + A )2
⋅e
d
dy
y+A
σY 2
dy
dτ =
τ=
9 Realizamos un cambio de variable:
( )
2σ Y2
σY 2
p e H0 = ∫
+∞
A
σY 2
1
σ Y 2π
⋅e
−τ 2
⋅ σ Y ⋅ 2dτ = ∫
+∞
A
σY 2
1
π
⋅ e −τ dτ
2
9 Se suele poner esta expresión de la p(e) en función del error
complementario:
2 + ∞ −τ 2
erfc(u ) =
∫ e dτ
( )
1 +∞
p(e ) = p e H 0 = ⋅ ∫ A
2 σY 2
π u
⎛ A ⎞
2 −τ
1
⎟
⋅ e dτ = ⋅ erfc⎜⎜
⎟
2
π
⎝ σY 2 ⎠
2
21
Tema VI: Transmisión Digital en Banda Base
6.4.- Decisión mediante umbral.
Cálculo de la probabilidad de error
9 Comentarios:
C
t i
El cociente A/σY representa una relación entre la señal (A)
y el ruido (σY)
Cuanto mayor A/σ sea menor será el error
La p(e) se suele expresar en función de Eb/N0
Eb
A=
⎫
Tb
A
⎪
N ⇒
⇒
=
Pn = σ Y2 = 0 ⎬
N
σY 2
0
2Tb ⎪⎭ σ Y =
2Tb
Eb = A2Tb
⎛ Eb ⎞
1
⎟
p(e ) = ⋅ erfc⎜⎜
⎟
2
⎝ N0 ⎠
Eb
N0
⇒ Expresión comúnmente utilizada
Tema VI: Transmisión Digital en Banda Base
6.4.- Decisión mediante umbral.
Cálculo de la probabilidad de error
Evolución
E l ió de
d la
l p(e)
( ) con Eb/N0
⇒ En relativamente
pocos decibelios
conseguimos
reducir bastante el
orden de magnitud
de p(e)
p( )
22
Tema VI: Transmisión Digital en Banda Base
6.4.- Decisión mediante umbral.
Cálculo de la probabilidad de error
¾Ejercicio:
¾Ej
i i cálculo
ál l del
d l umbral
b l de
d decisión
d i ió y de
d la
l
probabilidad de error para un código unipolar NRZ
“1”
“0”
A
0
TS
0
TS
y H1 → N (+ A, σ Y2 )
y H 0 → N (0, σ Y2 )
9 La distancia entre símbolos es ahora A, por lo tanto la p(e) será
más grande, pues los símbolos están más próximos
23
TEORÍA DE LA COMUNICACIÓN
CUESTIONES TEMA 6
TRANSMISIÓN DIGITAL BANDA BASE
1.- Explicar el modelo de un sistema de transmisión digital banda base.
2.- ¿En qué consiste la ISI? ¿Qué condición debe cumplir p(t) para que la ISI se reduzca a
cero?
3.- ¿Qué tipos de filtro P(f) se pueden utilizar para eliminar la ISI?. Ventajas e
inconvenientes de cada uno.
4.- ¿Qué es el factor de redondeo (rolloff) a de un pulso de espectro con forma de coseno
alzado?. Dibujar p(t) y P(f). ¿Qué ocurre en p(t) cuando a = 0?
5.- Explicar la ecualización utilizada en la práctica para reducir la ISI.
6.- Describir los diferentes criterios de decisión estudiados.
7.- ¿Para qué se utilizan los filtros adaptados? Deducir la expresión del filtro adaptado c(t)
en función de los pulsos de entrada s(t) que están contaminados con un ruido AWGN.
8. ¿Qué tareas tiene el decisor? ¿Qué es la probabilidad de error?
9.- Para un código polar deducir los umbrales de decisión según los tres criterios
estudiados.
10.- Deducir la probabilidad de error P(e) para un código polar según el criterio de
máxima verosimilitud (ML) en función de E b/N0.
11. Ventajas e inconvenientes de un código polar frente un código unipolar.
TEORÍA DE LA COMUNICACIÓN
PROBLEMAS TEMA 6
TRANSMISIÓN DIGITAL BANDA BASE
1.- Demuestre que, para el caso de codificación unipolar NRZ, la regla de decisión
óptima en sentido MAP es:
H1
> A σ 2 p0
x
+
ln
< 2
A p1
H0
donde x es la observación, A la amplitud del pulso ideal, σ 2 la potencia de ruido a la
entrada del decisor, y p i la probabilidad a priori de la hipótesis H i . Nota: Se utiliza filtro
adaptado con amplitud 1/Ts y duración Ts.
2.- Un ordenador tiene una tasa binaria de salida de 56 Kbits/sg. Esta señal se transmite
utilizando un sistema PAM binario en banda base que ha sido diseñado para tener el
espectro de pulso con forma de coseno alzado. Determinar el ancho de banda de
transmisión para los factores de redondeo del filtro a={0.25, 0.5, 0.75, 1}.
3.- Repetir el problema anterior considerando que el sistema envía símbolos formados por
grupos de tres bits.
4.- Una señal binaria se transmite por un canal paso bajo con un ancho de banda de 75
KHz. La duración de cada bit es de 10 µs. Determine el espectro del canal en coseno
alzado que satisface estos requerimientos.
5.a) Se diseña 1 un sistema binario polar en banda base para transmitir datos a una tasa de
4800 bps, a través de un canal paso bajo ideal cuya función de transferencia viene
dada por:
1 si f ≤ 4.8 Khz.
H c (f) =
resto
0
Se han elegido los filtros de transmisión y recepción de forma que contribuyan por
igual a la formación del pulso necesario, y para minimizar la probabilidad de error
media. Suponiendo que se utiliza un pulso cuyo espectro tiene forma de coseno
alzado, especifique la respuesta en frecuencia de dichos filtros.
b) En el caso de que el ruido a la entrada del filtro receptor sea blanco, aditivo,
gaussiano, con media cero y con densidad espectral de potencia N0/2, con N0=10-10
W/Hz., calcule la varianza del ruido resultante a la salida del filtro.
c) Utilizando el resultado del apartado anterior, calcule el valor de pico de la potencia
requerida para tener un valor de probabilidad de error media de 10-5.
Consulte el apartado 9.3 (Optimun transmitting and receiving filters for noise immunity) entregado junto el enunciado
de los problemas.
1
6.- Suponga un sistema banda base M-ario, es decir, que envía uno de los M símbolos
posibles de su alfabeto, con símbolos, en este caso, equiprobables. Considérese que la
amplitud de los símbolos recibidos es:
A
Ak = + k ⋅ A
2
con k = 0 , ± 1, ± 2 , ... Considere, asimismo, que la potencia del ruido a la entrada del
decisor es σ 2n , y que los umbrales de decisión se sitúan en los puntos medios entre los
símbolos. Demuestre que, en estas condiciones, la probabilidad de error del símbolo es
igual a:
1 A
Pe = 1 − erfc
M 2 2σ n
7.- Algunos sistemas de radio sufren distorsión multitrayecto, que es debida a la
existencia de más de un camino de propagación entre el transmisor y el receptor.
Considerar un canal con tal distorsión, que tenga una función de transferencia dada por la
siguiente expresión:
x(t)= K 1 s(t - t01 ) + K 2 s(t - t02 )
donde K1 y K2 son constantes, K1>>K2,, y t01 y t02 representan retardos de transmisión,
con t01 < t02.
a) Obtenga la respuesta en frecuencia de este canal.
b) Para cancelar el eco se propone utilizar un filtro transversal como el de la figura 1,
donde T= t02 - t01. Obtenga los valores de wi, i={0, 1, 2} en función de los
parámetros del canal.
Retardo
T
Entrada
w0
X
w1
Retardo
T
X
∑
Salida
Figura 1. Filtro de cancelación de eco.
w2
X
8.- En relación con la señal de la figura 2:
a) Represente la respuesta al impulso de un filtro adaptado a esa señal.
b) Determine la salida del filtro adaptado cuando la entrada es la señal de la figura. Indique
el instante óptimo de muestreo, así como la amplitud de salida del filtro en dicho
instante.
s(t)
A/2
T
T/2
t
-A/2
Figura 2. Señal de soporte del símbolo
9.- Se propone realizar un filtro adaptado mediante un filtro basado en una línea de retardo
con N+1 coeficientes w k , k={0, 1,..., N}. Asumiendo que la señal s( t ) a la que tiene que
estar adaptada el filtro tiene una duración de T segundos, encuentre el valor de los pesos
w k . Asuma que la señal se muestrea uniformemente.
10.- Dada una señal binaria, que utiliza señalización polar NRZ, siendo la amplitud de los
símbolos igual a 1 voltio. Esta señal se aplica a un filtro paso bajo RC con función de
transferencia:
H(f) =
1
1+
jf
f0
Suponer una tasa binaria de 2 f0 bits por segundo, construir el diagrama de ojos centrado en
Tb y anchura Tb para la señal a la salida del filtro con las siguientes secuencias:
a) Alternancia de unos y ceros.
b) Una larga secuencia de unos seguida de una larga secuencia de ceros.
c) Una larga secuencia de unos seguida por un único cero y después otra larga secuencia
de unos.
TEORÍA DE LA COMUNICACIÓN
SOLUCIONES DE LOS PROBLEMAS TEMA 6
TRANSMISIÓN DIGITAL BANDA BASE
1. Es una demostración.
2. α = 0.25 ⇒ BT = 35 KHz
α = 0.5 ⇒ BT = 42 KHz
α = 0.75 ⇒ BT = 49 KHz
α = 1 ⇒ BT = 56 KHz
3. α = 0.25 ⇒ BT = 11.67 KHz
α = 0.5 ⇒ BT = 14 KHz
α = 0.75 ⇒ BT = 16.33 KHz
α = 1 ⇒ BT = 18.67 KHz
4. α = 0.5; f1 = 25 KHz
5.
a) H TX ( f ) = P( f ) ⋅ e j 2πft0
H RX ( f ) = P( f ) ⋅ e − j 2πft0
N 0 10 −10
=
W
2
2
c) Valor pico de potencia: A2 = 9⋅10-10 W
6. Es una demostración.
7.
a) H ( f ) = K 1 ⋅ e − j 2πft01 + K 2 ⋅ e − j 2πft02
b) σ N2 =
K2
K 22
1
; ω1 = − 2 ; ω1 = 3
b) ω 0 =
K1
K1
K1
y (t ) = s (t − t 01 ) +
K 23
⋅ s(t − 3 ⋅ t 02 + 2 ⋅ t 01 ) ≈ s (t − t 01 )
K 13
K1 >> K2
8.
a) c(t ) = s(T − t )
1
b) y (t ) = s (t ) ∗ s (T − t )
Instante óptimo de muestreo:
t=T
Amplitud en dicho instante:
A2 ⋅ T
(
)
yT =
4
T⎞
⎛
9. ω k = s (T − k ⋅ TS ) = s⎜ T − k ⋅ ⎟
N⎠
⎝
10.
⎧ 1 − 2 ⋅ e −2πf 0t
,0 < t < Tb
⇒Señal periódica con período 2⋅Tb
a) y (t ) = ⎨
− 2πf 0 (t −Tb )
−1
, Tb < t < 2 ⋅ Tb
⎩2 ⋅ e
Diagrama de ojos de anchura Tb y centrado en Tb.
⎧1
b) y (t ) = ⎨
− 2πf 0t
−1
⎩2 ⋅ e
,t < 0
,t > 0
Diagrama de ojos de anchura Tb y centrado en Tb.
2
,t < 0
⎧ 1
⎪
− 2πf 0t
c) y (t ) = ⎨ 2 ⋅ e
−1
,0 < t < Tb
−
2
π
f
(
t
−
T
)
⎪1 − 2 ⋅ e 0 b , t > T
b
⎩
Diagrama de ojos de anchura Tb y centrado en Tb.
3
UNIVERSIDAD DE VALLADOLID
E.T.S. INGENIEROS DE TELECOMUNICACIÓN
TEORÍA DE LA COMUNICACIÓN
Tema 7: Transmisión digital paso banda
Teoría de la Comunicación - Curso 2010-2011
TEMA VII. Transmisión digital
paso banda
7.1.-Tipos básicos de modulaciones digitales
7.2.-Representación y análisis vectorial
7.3.-Receptores coherentes e incoherentes
7.4.-Análisis de los tipos de modulación
Tema VII: Transmisión Digital Paso Banda
Introducción
En el tema anterior estudiamos los sistemas de
transmisión digital banda base
En este tema estudiaremos la transmisión digital
de datos a través de un canal paso banda
Centramos el espectro de s(t) en torno a una frecuencia
no nula (fc)
Ventajas de la transmisión paso banda
1
Tema VII: Transmisión Digital Paso Banda
7.1.- Tipos básicos de
modulaciones digitales
Hay tres tipos básicos:
1) ASK (Amplitude Shift Keying)
2) PSK (Phase Shift Keying)
3) FSK (Frequency Shift Keying)
Tema VII: Transmisión Digital Paso Banda
7.1.- Tipos básicos de
modulaciones digitales
¾ ASK
9 A cada símbolo le asignamos una amplitud
s (t ) = ai ⋅ cos(2πf c t ) 0 ≤ t ≤ T
T: Tiempo de símbolo
9 La frecuencia fc se suele poner como múltiplo de la frecuencia del
símbolo:
fc =
n
T
f s=
1
frecuencia del símbolo
T
9 Ejemplo:
⎧"0" → a0 = 1 V
M =2 ⎨
⎩ "1" → a1 = 2 V
2
Tema VII: Transmisión Digital Paso Banda
7.1.- Tipos básicos de
modulaciones digitales
¾PSK
9 Asignamos a cada símbolo una fase inicial
si (t ) = a ⋅ cos(2πf ct + ϑi ) 0 ≤ t ≤ T
ϑi =
π
M
⋅ (2i + 1) , i = 0,K, M − 1
9 Ejemplo:
⎧ "0" → ϑ0 = π 2
M =2 ⎨
⎩ "1" → ϑ1 = 3π 2
⎧
⎪
⎪
M =4 ⎨
⎪
⎪⎩
"00" → ϑ0 = π 4
"01" → ϑ1 = 3π 4
"10" → ϑ2 = 5π 4
"11" → ϑ3 = 7π 4
Tema VII: Transmisión Digital Paso Banda
7.1.- Tipos básicos de
modulaciones digitales
¾FSK
9 Asignamos a cada símbolo una frecuencia distinta
s (t ) = a ⋅ cos(2πf i t ) 0 ≤ t ≤ T
9 En FSK las frecuencias desplazadas son múltiplos enteros de
fs, respecto a fc:
n+i
1
= fc + i ⋅ f S
f s= frecuencia del símbolo
T
T
9 Para PSK y FSK se normaliza la amplitud a
fi =
⎧
a 2 2E T E
2E
⎪ PS =
=
=
⇒⎨
a=
2
2
T
T
⎪⎩ ES = PS ⋅ T = E
T: tiempo de símbolo
E: energía de símbolo
3
Tema VII: Transmisión Digital Paso Banda
7.1.- Tipos básicos de
modulaciones digitales
¾Ej
¾Ejemplos
l de
d forma
f
de
d onda
d
9 ASK
0
T
2T
3T
0
T
2T
3T
0
T
2T
3T
9 PSK
9 FSK
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
Carácter vectorial de las señales
Estudiaremos una base teórica para las señales
anteriores
Las señales si(t) pueden ser expresadas como:
N
si (t ) = ∑ sij ⋅ φ j (t ) 0 ≤ t ≤ T ; i = 1, ... , M
j =1
¾ Ejemplo: PSK
s i (t ) = a ⋅ cos(2πf c t + ϑi ) = a ⋅ cos(ϑi ) ⋅ cos(2πf c t ) − a ⋅ sen(ϑi ) ⋅ sen(2πf c t )
φ1 (t )
φ2 (t )
4
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
conj nto de M señales
Vamos a representar el conjunto
{si(t)} como combinación lineal de N funciones
que deben ser ortonormales para formar base
( ⇒ ortogonalización de Grand-Schmidt)
¾Ortogonalidad: φi (t ), φ j (t ) = 0 ∀ i ≠ j
¾Norma unitaria: φi (t ), φi (t ) = 1 ∀ i
Trabajamos con símbolos de duración T
¾Producto escalar (orto-normalidad):
⎧0 i ≠ j
⎩1 i = j
φi (t ), φ j (t ) = ∫ φi (t ) ⋅ φ j (t )dt = δ [i − j ] = ⎨
T
0
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
L coeficientes
Los
fi i t sij se pueden
d obtener:
bt
⎡
∫ s (t )⋅ φ (t )dt = ∫ ⎢⎣∑ s
T
0
N
T
i
j
0
N
T
k =1
0
k =1
ik
⎤
⋅ φk (t )⎥ ⋅ φ j (t )dt =
⎦
= ∑ sik ⋅ ∫ φk (t ) ⋅ φ j (t )dt = sij
δ [k-j]
⇒ sij =
∫ s (t ) ⋅φ (t )dt
T
0
i
j
5
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
¾Ejemplo
j p 1: PSK ⇒ necesitamos como máximo 2
funciones base
φ1 (t ) =
2
⋅ cos(2πf c t )
T
Son ortonormales
2
φ2 (t ) =
⋅ sen(2πf c t )
T
si (t ) =
2E
⋅ cos(2πf c t + ϑi ) 0 ≤ t ≤ T
T
⇒ si (t ) = E ⋅ cos(ϑi ) ⋅
2
2
⋅ cos(2πf c t ) − E ⋅ sen(ϑi ) ⋅
⋅ sen(2πf ct )
T
T
φ2 (t )
φ1 (t )
9 Cada símbolo si(t) podemos verlo como un vector en ℜ2
si (t ) ⇒ [ E ⋅ cos(θ i ) , E ⋅ sen(θ i ) ]
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
9 Caso
C
particular:
ti l M = 4
φ2(t)
1
2
ϑ2
0
ϑ1
φ1(t)
⇒ Con estas dos funciones
base podemos representar
todos los símbolos que
podamos tener en PSK
3
6
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
¾Ej
¾Ejemplo
l 2:
2 ASK ⇒ necesitamos
i
sólo
ól 1 función
f ió base
b
si (t ) = ai ⋅
2
⋅ cos(2πf c t )
T
a1
a2
φ1(t)
a3
¾Ejemplo 3: FSK ⇒ necesitamos tantas funciones
base como símbolos haya
φ3(t)
9M = 3
si (t ) =
E
2E
⋅ cos(2πf i t )
T
E
E
φ1(t)
φ2(t)
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
í b l enviados
i d podemos
d
l como
Los símbolos
verlos
puntos en un espacio
¾Generados por una base de N funciones
ortonormales
¾Tendremos vectores en ℜN
Para la detección del símbolo: x(t) = si(t) + ω(t)
¾Hay que definir regiones asociadas a cada símbolo
para tomar decisiones
¾Para ello vamos a estudiar sus coordenadas
7
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
Análisis de las coordenadas
Tenemos:
N
si (t ) = ∑ sij ⋅ φ j (t ) 0 ≤ t ≤ T
j =1
Siendo las coordenadas:
T
sij = ∫ si (t ) ⋅ φ j (t )dt
0
Sin embargo, realmente recibimos:
⇒ Suponemos ω(t) → AWGN
x(t ) = si (t ) + ω (t )
− Media cero: ηω = 0
− Sω ( f ) =
N0
2
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
Para obtener las coordenadas del símbolo
¾Asumimos sincronismo: detección coherente
×
∫
T
∫
T
0
dt
x1 = si1 + n1
dt
x2 = si2 + n2
dt
xN = siN + nN
φ1(t)
x(t) = si(t) + ω(t)
×
0
φ2(t)
×
φN(t)
∫
T
0
Coordenada i-ésima
del símbolo
8
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
⎡ x1 ⎤
⎢x ⎥
⎢ 2⎥
⎢M ⎥
⎢ ⎥
⎣ xN ⎦
9 ω(t): Ruido gaussiano a la entrada ⇒ el ruido a la salida
también será gaussiano
⇒ Las observaciones xj serán variables aleatorias
gaussianas
¾Obtenemos un vector de variables aleatorias:
Xj
Hi
(
→ N η j , σ 2j
)
Para describir estas variables calcularemos su media y
varianza
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
9 Media
{
ηj = E X j
{
Hi
}= E{s
ij
+ n j } = sij + E{n j } = sij
}
E{n j } = E ∫ ω (t ) ⋅ φ j (t )dt = 0
{
E Xj
Hi
T
0
}= s
⇒ Ya que el ruido a la
entrada tiene media nula
ij
9 Varianza (matriz de covarianzas)
c jk = E {(X j − η j )⋅ ( X k − η k )}
X j = sij + n j ⎫
⎬ ⇒ c jk = E{n j ⋅ nk }
η j = sij
⎭
9
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
9 Varianza ((matriz de covarianzas))
c jk = E
=∫
{∫ ω (t )⋅φ (t )dt ⋅ ∫ ω (t )⋅φ (t )dt }=
T
T
T
0
j
1
0
1
1
j
2
T
1
0
j
2
1
k
2
N0
⋅ δ (t1 − t 2 )
2
1
T
2
⇒ Ruido blanco
de media nula
j≠k
⎧⎪ 0
N0
⋅ φ j (t1 ) ⋅ φk (t1 )dt1 = ⎨ N 0
0 2
⎪⎩ 2
N
= 0 j = 1,K, N
2
c jk = ∫
2
∫ E{ω (t )⋅ ω (t )}⋅ φ (t )⋅ φ (t )dt dt
Rω (t1 − t 2 ) =
σ X2
k
2
0
j=k
⇒ Matriz de
covarianzas
diagonal
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
⇒ Xj
N ⎞
⎛
→ N ⎜ s ij , 0 ⎟
2 ⎠
⎝
Hi
Las observaciones son gaussianas, incorreladas, y
tienen todas la misma varianza
⇒ Tenemos N observaciones independientes
9 Función de verosimilitud para cualquier hipótesis
( )
N
(
f X x Hi = ∏ f X j x j
( )
f X x Hi
j =1
Hi
)
N
− 2 ⋅∑ ( x j − sij )
2σ j =1
⎛ 1 ⎞
=⎜
⎟ ⋅e
σ
2
π
⎝
⎠
N
1
2
σ=
N0
2
10
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
¾Reglas de decisión para 2 hipótesis
9 Criterio MAP
( )
( )
H0
H0
f X x H 0 > p (H1 )
>
p (H 0 x ) p (H1 x ) ⇔
f X x H1 < p (H 0 )
<
H1
H1
9 Criterio ML
( )
f X x H0
H0
( )
( )
( )
H0
f X x H0 >
>
f X x H1 ⇔
1
f X x H1 <
<
H1
H1
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
¾Reglas de decisión para M hipótesis
9 Criterio MAP
Maximiza la probabilidad a posteriori
mˆ = arg máx[ p (H m x )] m = 1,K, M
9 Criterio ML
Maximiza la función de verosimilitud
[ ( )]
mˆ = arg máx f X x H m
m = 1,K , M
11
Tema VII: Transmisión Digital Paso Banda
7.2.- Representación y análisis
vectorial
¾Observamos: x = [x1 , K, xN ] , y tratamos de decidir
cuál de los M símbolos es el posible
[ ( )]
9 Criterio ML: máx f X x H i
( )
f X x Hi
N
− 2 ⋅∑ ( x j − sij )
2σ j =1
⎛ 1 ⎞
=⎜
⎟ ⋅e
⎝ σ 2π ⎠
N
1
2
[ ( )]
⎧N
2⎫
máx f X x H i ⇔ mín⎨∑ (x j − sij ) ⎬
⎩ j =1
⎭
Lo que hacemos es calcular la distancia de la
observación x a todos los símbolos en ℜN, y
quedarnos con aquel que está más cerca de la
observación
Tema VII: Transmisión Digital Paso Banda
7.3.- Receptores coherentes e
incoherentes
Hasta ahora hemos supuesto una detección
coherente
¾La señal observada está perfectamente en fase con
cada una de las señales base ⇒ están sincronizadas
N
si (t ) = ∑ sij ⋅ φ j (t )
j =1
φ j (t )
Sincronizadas
¾Pero hay receptores que no precisan de este
sincronismo
12
Tema VII: Transmisión Digital Paso Banda
7.3.- Receptores coherentes e
incoherentes
¾De esta manera,
manera se distinguen
9 Sistemas coherentes
Hay un tiempo previo para engancharse en fase,
sincronizare y, luego, empezar a procesar
Son sistemas más complejos
¾ Sistemas incoherentes
No necesitan sincronismo
Tema VII: Transmisión Digital Paso Banda
7.3.- Receptores coherentes e
incoherentes
¾Ejemplo: FSK
FSK, con M = 2
9 Recibimos: x(t ) =
φ1 (t ) =
2
⋅ cos(2πf1t )
T
2
φ2 (t ) =
⋅ cos(2πf 2t )
T
2E
⋅ cos(2πf1t + ϑ )
T
φ2(t)
ϑ : desconocido
(error de fase)
ϑ
φ1(t)
Queremos obtener
la coordenada del
símbolo asociada a
f1 ⇒ E
E
13
Tema VII: Transmisión Digital Paso Banda
7.3.- Receptores coherentes e
incoherentes
9 Esquema
q
del detector incoherente a frecuencia fi
2E
x(t ) =
⋅ cos(2πf i t + ϑ ) =
T
⎡ 2
⎤
2
= E ⋅⎢
⋅ cos(2πf i t ) ⋅ cos(ϑ ) −
⋅ sen(2πf i t ) ⋅ sen(ϑ )⎥
T
⎣ T
⎦
×
x(t)
∫
T
0
dt
E ⋅ cos(ϑ )
2
⋅ cos(2πf i t )
T
×
∫
T
0
( )2
yc2
+
+
dt
− E ⋅ sen(ϑ )
( )2
+
E
ys2
2
⋅ sen(2πf i t )
T
Tema VII: Transmisión Digital Paso Banda
7.3.- Receptores coherentes e
incoherentes
¾Los sistemas incoherentes son más sencillos,
sencillos pero
tienen alguna desventaja frente a los sistemas
coherentes:
9 El ruido tiene dos componentes: fase y cuadratura
n(t ) = nc (t ) ⋅ cos(2πf i t ) − ns (t ) ⋅ sen(2πf i t )
Con un sistema incoherente pasan las dos
componentes, por lo que se complica el análisis de
ruido
Con un sistema coherente filtramos una de las dos
componentes
14
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
Vamos a estudiar los siguientes esquemas:
¾Coherentes
¾ PSK binario
¾ FSK binario
¾ PSK cuaternario (QPSK)
¾Incoherentes
FSK
S bi
binario
i
PSK diferencial (DPSK)
Para comparar los esquemas: probabilidad de
error
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
PSK binario,
binario con detección coherente
Tenemos 2 símbolos distintos (M = 2), cada
uno con su fase asociada
H1 ≡ s1 (t ) =
2E
⋅ cos(2πf c t ) 0 ≤ t ≤ T
T
H 0 ≡ s0 (t ) =
2E
2E
⋅ cos(2πf c t + π ) = −
⋅ cos(2πf c t ) 0 ≤ t ≤ T
T
T
Sólo es necesario una función base
φ (t ) =
2
⋅ cos(2πf ct )
T
15
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
En recepción tendremos:
Región Z0
− E
Región Z1
Si aplicamos el criterio ML
⇒ El umbral será el punto
medio de las distancias entre
ambos
φ(t)
0
E
σ2
σ2
¾Esquema del detector: criterio ML
x(t) = s(t) + ω(t)
×
φ(t)
∫
T
0
dt
“1”
x
0
λ=0
“0”
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
¾Probabilidad de error
9 Si usamos el criterio ML, será la misma que la de un
sistema polar banda base
A
σ2
-A
σ2
Ahora: ⎧ A = E
⎪
⎨σ 2 = N 0
⎪⎩
2
1
⎛ A ⎞
p(e ) = ⋅ erfc⎜
⎟
2
⎝σ 2 ⎠
⎛
⎞
⎜
⎟
1
E
⎟
p(e ) = ⋅ erfc⎜
⎜ N0
⎟
2
⋅ 2⎟
⎜
⎝ 2
⎠
16
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
9 Por lo qque la probabilidad
p
de error queda:
q
⎛ E ⎞
1
⎟
p(e ) = ⋅ erfc⎜⎜
⎟
2
⎝ N0 ⎠
p(e)
⇒ La probabilidad de erorr
disminuye cuanto mayor sea
la energía respecto a la
variabilidad introducida por
el ruido
Eb/N0
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
FSK binario,
binario con detección coherente
FSK:
si (t ) =
fi =
2E
⋅ cos(2πf i t ) 0 ≤ t ≤ T
T
n+i
i
= fc +
T
T
⎧f →H
1
M =2 ⇒⎨ 1
Con dos
C
d símbolos:
í b l
⎩ f0 → H 0
Necesitamos dos funciones base:
2
φ1 (t ) =
⋅ cos(2πf1t )
T
2
φ0 (t ) =
⋅ cos(2πf 0t )
T
⇒ Son ortonormales
17
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
En el receptor:
¾La constelación queda: criterio ML
φ0(t)
x1 = x0
Región Z0
E
⇒ Umbral: Bisectriz
del pprimer y tercer
cuadrante
Región Z1
φ1(t)
E
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
¾Esquema del detector: criterio ML
×
x(t)
∫
T
∫
T
0
dt
φ1(t)
×
0
dt
φ0((t))
¾Criterio de decisión:
x1
+
-
+
“1”
L
0
λ=0
x0
“0”
H1
H1
H0
H0
>
>
x1 x0 ⇒ l = x1 − x0 0
<
<
9 L = X1 - X0: Diferencia de variables aleatorias
X1 y X0 son gaussianas e incorreladas Ö independientes
⇒ L gaussiana
18
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
9 L es una v. a. ggaussiana y para
p describirla:
Media
{ } { }− E{x }= 0 −
E L H 0 = E x1
H0
0 H0
{ } { }− E{x }=
E L H1 = E x1
H1
E =− E
E −0 = E
0 H1
Varianza
σ L2
H0
= σ L2
H1
= σ x21 + σ x20 =
N0 N0
+
= N0
2
2
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
¾Probabilidad de error
9 La regla de decisión se plantea sobre L
Región Z0
Región Z1
l
− E
N0
0
E
⇒ Estamos de nuevo en el
caso polar (criterio ML),
con: A = E
σ 2 = N0
N0
⎛ E
1
⎛ A ⎞ 1
p(e ) = ⋅ erfc⎜
⎟ = ⋅ erfc⎜⎜
2
⎝σ 2 ⎠ 2
⎝ 2N0
⎞
⎟
⎟
⎠
19
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
9 Esta p
probabilidad de error es mayor
y qque en PSK
p(e)
FSK
⇒ Para una misma
relación: Eb/N0, la p(e)
es mayor en FSK
PSK
Eb/N0
9 Intuitivamente:
PSK: Símbolos polares
s0
− E
FSK: Símbolos ortogonales
s1
0
E
E
E
En PSK los símbolos están más separados, por lo que
la probabilidad de error será menor
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
PSK cuaternario (QPSK),
(QPSK) con detección
coherente
Ahora tenemos cuatro símbolos: M = 4
si (t ) =
2E
2i + 1 ⎞
⎛
⋅ cos⎜ 2πf c t + π
⎟ 0 ≤ t ≤ T ; i = 0,1, 2, 3
T
4 ⎠
⎝
Harán falta 2 funciones base:
φ1 (t ) =
2
⋅ cos(2πf c t )
T
φ2 (t ) =
2
⋅ sen(2πf c t )
T
20
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
La constelación quedará:
φ2(t)
s1
− E
E
E
− E
E
2
− E
s2
¾Con coordenadas:
s0
2
2
E
2
φ1(t)
s3
− E
⎡
E⎤
⎢±
⎥
2⎥
sij = ⎢
⎢± E ⎥
2 ⎥⎦
⎣⎢
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
En el receptor: criterio ML
¾Las regiones para cada símbolo estarán limitadas
por los ejes
φ2(t)
Región Z1
s1
Región Z0
s0
φ1(t)
s2
Región Z2
s3
Región Z3
21
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
¾Esquema del detector: criterio ML
×
x(t) = si(t) + ω(t)
∫
T
0
dt
x1
1/0
φ1(t)
×
MUX
∫
T
0
dt
x2
“00”
“01”
“10”
“11”
1/0
φ2(t)
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
¾Probabilidad de error: criterio ML
3
( )
p(e ) = ∑ p e H i ⋅ p(H i )
i =0
9 Símbolos equiprobables: p(H i ) =
1
4
( )
9 Los p e H i son iguales para todos los símbolos,
símbolos ya que
hay simetría total
p(e ) =
( ) ( )
1
⋅ 4 ⋅ p e Hi = p e Hi
4
, ∀ i = 0,1, 2, 3
22
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
9 Habrá error de símbolo si:
p(e ) = p(ea ∪ eo ) = p(ea ) + p(eo ) − p(ea ∩ eo )
Error en
abscisa
Error en
ordenada
9 Los ruidos son independientes en cada eje:
p(e ) = p(ea ) + p(eo ) − p(ea ) ⋅ p(eo )
9 Los ejes son iguales:
p(ea ) = p(eo ) ⇒ p(e ) = 2 ⋅ p(eo ) − p 2 (eo )
Normalmente: p(e) = 10-4, 10-5, … ⇒ p2(eo)
despreciable frente a 2⋅p(eo), luego:
p(e ) ≅ 2 ⋅ p(eo )
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
9 Calculamos p(
p(eo)):
E
− E
2
N0 2
2
N0 2
⇒ Estamos de nuevo en el
caso polar (criterio ML),
con: A = E
2
σ 2 = N0 2
⎛
E2 ⎞
1
⎟
⋅ erfc⎜⎜
⎟
2
⎝ N0 2 ⋅ 2 ⎠
9 Por lo tanto la probabilidad de error de símbolo queda:
⎛ E ⎞
⎟
p(eS ) = erfc⎜⎜
⎟
⎝ 2N 0 ⎠
p(eo ) =
23
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
9 En Q
QPSK no hay
y igualdad
g
entre símbolo y bit
2 bits ≡ 1 símbolo
(
) ( ) ( ) (
p(es ) = p eb1 ∪ eb2 = p eb1 + p eb2 − p eb1 ∩ eb2
⎛ E
1
p(es ) ≅ 2 ⋅ p(eb ) ⇒ ⋅ erfc⎜⎜
2
⎝ 2N0
)
0
⎞
⎟ = p(eb )
⎟
⎠
− E ≡ Energía de símbolo
− E = 2 ⋅ Eb ⇒ Eb = E/2 ≡ Energía de bit
⎛ Eb ⎞
1
⇒ Probabilidad de
⎟
⋅ erfc⎜⎜
⎟
2
error de bit (BER)
⎝ N0 ⎠
9 En QPSK tenemos la misma BER que en PSK binario,
pero ahora la tasa binaria se ha duplicado (transmitimos al
doble de velocidad)
p(eb ) =
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
FSK binario,
binario con detección incoherente
En los sistemas con detección incoherente el
transmisor y el receptor no están sincronizados
¾⇒ si(t) y φi(t) no están alineados temporalmente
si (t ) =
2E
⋅ cos(2πf i t + ϑ )
T
φi (t ) =
2
⋅ cos(2πf i t )
T
ϑ : Desconocido
(error de fase)
Solución: Operar con las envolventes
24
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
¾Al operar con la envolvente,
envolvente mientras que las
proyecciones en fase y cuadratura (x e y) dependen
de θ, la envolvente es constante
y =
E ⋅ sen(ϑ )
x 2 (ϑ ) + y 2 (ϑ ) = E ≡ cte. ∀ ϑ
E
ϑ
φ1(t)
x = E ⋅ cos(ϑ )
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
En el receptor:
¾Detector de envolvente a frecuencia fi
×
x(t) = si(t) + ω(t)
∫
T
0
dt
( )2
2
⋅ cos(2πf i t )
T
×
∫
T
0
+
+
dt
( )2
E
+
2
⋅ sen(2πf i t )
T
25
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
¾Si esperamos 2 símbolos posibles (M = 2),
2)
calculamos las envolventes a las frecuencias f1 y f2,
y comprobamos cuál es mayor
¾Esquema del detector
9 Suponemos que se aplica el criterio ML
x(t) = si(t) + ω(t)
r1
Detector de
envolvente a f1
“1”
+
-
Detector de
envolvente a f2
+
λ=0
r2
“0”
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
¾Probabilidad de error: criterio ML
9 Suponemos que se envía el símbolo H1 (f1)
El detector de envolvente a f2 sólo recibe ruido
⇒ La envolvente de un ruido gaussiano sigue
una distribución Rayleigh
( )= σ
r2 → f R2 r2
r2
H1
2
⋅e
−
r22
2σ 2
r2 > 0
El detector de envolvente a f1 recibe señal y ruido
⇒ La envolvente de una señal sinusoidal y un
ruido gaussiano sigue una distribución Rician
( )= σ
r1 → f R1 r1
H1
r1
2
⋅e
−
r12 + A2
2σ 2
⎛ A⋅ r ⎞
⋅ I 0 ⎜ 2 1 ⎟ r1 > 0
⎝ σ ⎠
⎧⎪ A = E
⎨σ 2 = N 0
⎪⎩
2
26
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
9 Expresamos
p
la probabilidad
p
de error como:
( )
( )
p(e ) = p e H1 ⋅ p(H1 ) + p e H 0 ⋅ p(H 0 )
Los símbolos son equiprobables: p(H 0 ) = p(H1 ) = 1
2
( ) ( )
p e H 0 = p e H1
Por la simetría del problema:
Por lo que la probabilidad de error se simplifica en:
p(e ) =
[ ( ) ( )] ( ) ( )
1
⋅ p e H 0 + p e H 1 = p e H 0 = p e H1
2
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
( ) (
Calculamos: p e H1 = p r2 > r1
r2
H1
H1
)
r2 = r1
R
r1
r1
r1
( ) ( )
p(e ) = p e H1 = p R H1 = ∫
+∞
0
∫
+∞
r1
(
f R1R2 r1 , r2
H1
)dr dr
2
1
27
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
Las variables aleatorias qque representan
p
el ruido son
gaussianas e incorreladas
( ) y f (r ) independientes
⇒ f R1 r1
H1
R2
2 H1
⇒ El ruido en un canal es ortogonal al del otro
(
f R1R2 r1 , r2
( )
H1
) = f (r )⋅ f (r )
R1
r12 +
1 H1
R2
2 H1
( E)
2
2
⎛ E ⋅ r1 ⎞ +∞ r2 − 2rσ2 2
⎜
⎟⎟ ∫
⋅
I
⋅e
dr2 dr1
0⎜
2
2
0 σ2
r
⎝ σ ⎠ 1 σ
9 Y la probabilidad de error queda:
⇒ p(e ) = p e H1 = ∫
+∞
r1
E
1 −
p(e ) = ⋅ e 2 N 0
2
⋅e
−
2σ 2
⇒ Expresión diferente a las anteriores, ya que
tenemos otras fX(x)
⇒ Sigue siendo una función decreciente con E/N0
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
PSK diferencial ((DPSK))
De forma aproximada se puede ver como un
sistema PSK con detección incoherente (no es
correcto)
¾QPSK con detección coherente
si (t ) =
2E
⋅ cos(2πf c t + ϑi )
T
Información en la fase: ϑi
⎧
2
⋅ cos(2πf c t )
⎪φ1 (t ) =
9 Necesitamos dos funciones base: ⎪
T
⎨
φ2(t)
⎪φ2 (t ) = 2 ⋅ sen(2πf c t )
si
⎪⎩
T
ϑi
φ1(t)
⇒ El argumento ϑi lo usamos para tener
que decidir entre los posibles símbolos
28
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
¾QPSK con detección incoherente
2E
⋅ cos(2πf c t + ϑi +ψ )
ψ : Desconocido
T
(error de fase)
9 Ahora los símbolos no están alineados temporalmente con
las funciones base
si (t ) =
QPSK-Coherente
ϑ1
ϑ2
QPSK-Incoherente
ϑ0
ϑ0
ϑ1
ϑ3
⇒ Todo está
girado un ángulo
desconocido ψ
ψ
ϑ3
ϑ2
9 Si mantenemos las decisiones como con detección
coherente, la P(e) será muy elevada
9 En PSK es muy importante estar sincronizado en fase
⇒ PSK con detección incoherente no tiene sentido
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
Sin embargo
embargo, se puede aprovechar la diferencia
entre las fases de los símbolos consecutivos
¾Ejemplo: PSK, con M = 2
“0” → Fase ϑ0 = π
“1” → Fase ϑ1 = 0
BPSK-Coherente
“0”
0
ϑ0
BPSK-Incoherente
“1”
ψ
“1”
1
ϑ1 − ϑ0 = π
ϑ1
“0”
ϑ1 − ϑ0 = π
9 Se mantiene la diferencia de fases
¾DPSK consiste en enviar la información sobre la
diferencia de fases, y no sobre las fases absolutas
29
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
¾Ejemplo DPSK:
9 Queremos enviar: {bk} = {10010011}
9 Esta información la codificamos con una secuencia
intermedia: d k = d k −1 O.L. bk
Operación lógica
Caso particular: Si bk = 1 ⇒ dk = dk-11
Si bk = 0 ⇒ dk = d k −1
9 Tomamos el primer valor de dk arbitrariamente a “1”
{bk} =
{1 0 0 1 0 0 1 1}
{dk} = {1 1 0 1 1 0 1 1 1}
Fase = 0 0 π 0 0 π 0 0 0
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
9 Codificamos {dk} como PSK ordinario
9 Tenemos como resultado neto en {dk}:
Cambio de fase: si se ha enviado “0”
Se mantiene la fase: si se ha enviado “1”
30
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
En recepción: criterio ML
¾Se reciben dos símbolos consecutivos y se
comprueba si cambia su fase o no
9 Tendremos dos situaciones posibles
φ2(t)
φ2(t)
s(i-1)
s(i)
s(i)
()
ψ
ψ
φ1(t)
φ1(t)
s(i-1)
No cambia la fase ⇒ “1”
Cambia la fase ⇒ “0”
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
¾Para decidir si hay cambio de fase,
fase habría que
realizar el producto escalar entre los dos símbolos
consecutivos y comprobar el signo
s (i ) ⋅ s (i − 1) = s (i ) ⋅ s (i − 1) ⋅ cos(ϑ )
ϑ = 0 : No cambia la fase ⇒ s (i ) ⋅ s (i − 1) > 0 →"1"
ϑ = π : Cambia la fase
⇒
s (i ) ⋅ s (i − 1) < 0 →"0"
9 Decisión:
s (i )c ⋅ s (i − 1)c + s (i )s ⋅ s(i − 1)s
H1
>
<
0
H0
31
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
¾Esquema del detector: criterio ML
×
x(t)
∫
T
0
dt
sc(i)
2
⋅ cos(2πf c t )
T
×
∫
T
0
2
⋅ sen(2πf ct )
T
×
Retardo
T
sc(i-1)
dt
ss(i)
×
+
“1”
+
+
λ=0
“0”
Retardo
T
ss(i-1)
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
¾Probabilidad de error
9 Su cálculo es más complicado que en los esquemas
anteriores
Hay que tener en cuenta la correlación entre dos
símbolos en las decisiones
9 Cualitativamente:
E
−
Para un sistema incoherente: p(e ) = 1 ⋅ e 2 N 0
2
Ahora tenemos dos símbolos para decidir: ES = 2 ⋅ Eb
⇒ Podemos aproximar la p(e) en DPSK
Eb
1 −
p(e ) ≅ ⋅ e N 0
2
32
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
9 No es del todo correcta
Los símbolos no son totalmente independientes
Los errores en un bit se propagan durante un tiempo
(propagación por ráfagas)
Cada cierto tiempo se re-sincroniza para evitar que
esas ráfagas se extiendan en el tiempo
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
Comparación entre esquemas de modulación
PSK y QPSK coherentes:
p(e ) =
⎛ Eb ⎞
1
⎟
⋅ erfc⎜⎜
⎟
2
N
0
⎝
⎠
FSK coherente:
p(e ) =
⎛ Eb
1
⋅ erfc⎜⎜
2
⎝ 2N0
DPSK:
p(e ) ≈
1 − N0
⋅e
2
FSK incoherente:
p(e ) =
1 − 2 N0
⋅e
2
⎞
⎟
⎟
⎠
Eb
Eb
33
Tema VII: Transmisión Digital Paso Banda
7.4.- Análisis de los tipos de
modulación
34
TEORÍA DE LA COMUNICACIÓN
CUESTIONES TEMA 7
TRANSMISIÓN DIGITAL PASO BANDA
1.- Tipos de modulación digital paso banda.
2.- Diagramas de bloques que relacionan {sij} y {si(t)} con i = 1, ..., M y j = 1, ..., N.
3.- Si X(t) = si(t) + W(t) es la entrada al banco de correladores, con W(t) un ruido blanco,
gaussiano, con media cero y densidad espectral de potencia N0/2. ¿Cuánto vale Xj que es
la salida de cada uno de ellos?. ¿Cuál es la distribución estadística de las variables
aleatorias Xj?. Deducir la media y la varianza de esas variables aleatorias.
4.- ¿Cuál es la correlación cruzada de las variables aleatorias Xj y Xk con j≠k?. ¿Son Xj y
Xk independientes?
5. Deducir la expresión de la función densidad de probabilidad de X, vector de las
variables aleatorias {Xj}, condicionado a haber transmitido el símbolo mi.
6.- ¿Cuál es la regla de decisión de máxima probabilidad a posteriori?
7.- ¿Cuál es la regla final de decisión de máxima verosimilitud?
8.- ¿Qué diferencia hay entre detección coherente e incoherente?
9.- Determinar {si(t)}, {φ j(t)}, {sij}, esquema del detector, y expresión de la probabilidad
de error media para BPSK coherente y BFSK coherente.
10.- Diagrama de bloques para la detección incoherente en BFSK. Deducir la expresión
de su probabilidad de error.
11.- Determinar {si(t)}, {φ j(t)}, {sij}, espacio de señales transmitidas {Zi}, esquema del
detector, y expresión de la probabilidad de error para la modulación QPSK coherente.
12.- Explicar la modulación DPSK, y mostrar el diagrama de bloques del detector.
13.- Comparar las curvas de Pe en función de E/N0 para BPSK coherente, BFSK
coherente y BFSK no coherente.
TEORÍA DE LA COMUNICACIÓN
PROBLEMAS TEMA 7
TRANSMISIÓN DIGITAL PASO BANDA
1.- Un transmisor envía uno de los mensajes siguientes:
⎡ ⎛
Δf ⎞ ⎤ ⎫
s 0 (t ) = A ⋅ cos ⎢2π ⎜ f c +
⎟t ⎪
2 ⎠ ⎥⎦ ⎪
⎣ ⎝
⎬ 0 < t < Tb
⎡ ⎛
Δf ⎞ ⎤ ⎪
s1 (t ) = A ⋅ cos ⎢2π ⎜ f c −
⎟t
2 ⎠ ⎥⎦ ⎪⎭
⎣ ⎝
de manera equiprobable. Sobre las señales enviadas se superpone un ruido gaussiano, de
media cero y densidad espectral de potencia No/2. Suponga que la duración de los símbolos
es de Tb segundos, así como que fc >> 1/Tb. El receptor correla las señales recibidas con las
funciones φj(t) = cos(2πfjt), siendo fj igual, en cada caso, a las frecuencias asociadas a cada
símbolo. Definiendo el coeficiente de correlación ρ entre s0(t) y s1(t) como
ρ=
∫
Tb
0
s 0 (t ) ⋅ s1 (t ) ⋅ dt
⎡ Tb s 2 (t ) ⋅ dt ⎤ ⋅ ⎡ Tb s 2 (t ) ⋅ dt ⎤
⎢⎣ ∫0 0
⎥⎦ ⎢⎣ ∫0 1
⎥⎦
obtenga la probabilidad de error de bit del sistema como función de los parámetros que
figuran en el enunciado del problema.
2.- Una universidad desea establecer un radioenlace entre dos de sus edificios. La calidad
del enlace deber ser tal que la probabilidad de error de bit no puede superar 10-4. La
potencia máxima que se permite transmitir es de 30 dBW, y la atenuación del canal es de 30
dB. El ruido que se superpone a la comunicación es blanco gaussiano, con densidad
espectral de potencia de nivel N0/2, con N0 = -78 dBW/Hz. Se plantean dos situaciones:
• Suponiendo que el sistema emplea QPSK bajo las condiciones del criterio ML:
a) Calcule el máximo régimen binario que puede mantenerse en el enlace.
b) Dibuje la constelación de la señal modulada a la entrada del receptor.
c) Indique la estructura del receptor óptimo, así como las regiones de decisión
correspondientes a cada símbolo.
d) Calcule la eficiencia espectral (régimen binario dividido por ancho de banda
ocupado) tomando como ancho de banda el mínimo teórico.
• Suponiendo que el sistema emplea una modulación BFSK ortogonal coherente,
obtenga el umbral de decisión óptimo sabiendo que la probabilidad a priori del
símbolo “0” es 0.7. Exprese el resultado en función de Eb y No.
3.- La secuencia binaria {1100100010} se aplica a un transmisor DPSK que emplea como
referencia el dígito binario “1”. Esquematice en un cuadro la secuencia original, la
secuencia intermedia, las fases enviadas, las componentes en fase y cuadratura y las
polaridades de los productos escalares de ambas, así como la secuencia de símbolos
recibida (asuma ausencia de ruido).
4.- Sea un sistema PSK coherente binario, que emite uno de los dos posibles símbolos:
s1 (t ) =
2 Eb
2 Eb
⋅ k ⋅ sin( 2πf c t ) +
1 − k 2 ⋅ cos(2πf c t )
Tb
Tb
0 ≤ t ≤ Tb
s o (t ) =
2 Eb
2 Eb
⋅ k ⋅ sin( 2πf c t ) −
1 − k 2 ⋅ cos(2πf c t )
Tb
Tb
0 ≤ t ≤ Tb
Supongamos que los símbolos se transmiten de forma equiprobables y que la señal llega
contaminada al receptor con un ruido blanco, gaussiano, media nula y densidad espectral de
potencia S w ( f ) = N 0 / 2 .Deduzca la probabilidad de error en función del error
complementario de E b , k y N 0 . Compare con la probabilidad de error del sistema
convencional BPSK con detección coherente para símbolos equiprobables. Suponga
k ≤ 1.
TEORÍA DE LA COMUNICACIÓN
SOLUCIONES DE LOS PROBLEMAS TEMA 7
TRANSMISIÓN DIGITAL PASO BANDA
⎡ A T ⋅ (1 − ρ ) ⎤ 1
⎡ Eb ⋅ (1 − ρ ) ⎤
1
⋅ erfc ⎢ ⋅ b
⎥ = ⋅ erfc ⎢
⎥
2
N0
2 ⋅ N0 ⎦
⎣2
⎦ 2
⎣
2. Haciendo uso de una modulación QPSK:
a) Rb ≤ 10 Mbps
b)
1.
p(e ) =
CONSTELACIÓN
c)
RECEPTOR ÓPTIMO
1
d) η = 2
Usando BFSK ortogonal coherente:
H1
y
> N0
⋅ 0.42
< Eb
H0
3.
Secuencia original
Secuencia intermedia
Fase
Componente en fase (xc)
Componente en fase retardada (xc-1)
Componente en cuadratura (xs)
Componente en cuadratura retardada (xs-1)
xc⋅xc-1
xs⋅xs-1
xc⋅xc-1+ xs⋅xs-1
Secuencia recibida
1
1
0
+
+
+
+
+
+
+
1
1
0
+
+
4.
⎛ Eb (1 − k 2 ) ⎞
1
⎟
P(e) = erfc⎜
⎜
⎟
2
N0
⎝
⎠
2
1
1
0
+
+
+
+
+
+
+
1
0
0
π
+
+
0
0
1
0
+
+
0
1
1
0
+
+
+
+
+
+
+
1
0
0
π
+
0
0
1
0
+
+
0
0
0
π
+
0
1
0
π
+
+
+
+
1
0
1
0
+
+
0
UNIVERSIDAD DE VALLADOLID
E.T.S. INGENIEROS DE TELECOMUNICACIÓN
TEORÍA DE LA COMUNICACIÓN
PRÁCTICAS DE LABORATORIO
CURSO 2010/2011
UNIVERSIDAD DE VALLADOLID
E.T.S. INGENIEROS DE TELECOMUNICACIÓN
TEORÍA DE LA COMUNICACIÓN
Tutorial de Introducción a Matlab ®
Teoría de la Comunicación - Curso 2010-2011
Tutorial de Introducción a Matlab®
1. OBTENCIÓN DE AYUDA Y GUÍAS DE REFERENCIA
Matlab® es un conjunto de herramientas de cálculo basadas en matrices
especialmente diseñado para resolver problemas numéricos como los que se dan en
aplicaciones científicas o de ingeniería.
A continuación se detallan varios sistemas de ayuda que permiten obtener
información de las diferentes funcionalidades de Matlab®. Se recomienda que el alumno
se familiarice con ellos y con la información que proporcionan:
•
•
•
Ayuda on line de Matlab®: accesible a través de los comandos helpwin, help
o lookfor.
helpdesk nos proporciona la ayuda en su versión web. Un buen punto de
partida para introducirse en Matlab® es el Enlace “getting started”.
Demostraciones de Matlab® accesibles a través del comando demo.
Además, también serán elementos de ayuda para el desarrollo del laboratorio:
•
•
The Mathworks, manual de usuario de Matlab® en formato “.pdf”, accesible
a través de la ayuda en formato “.html”.
Su página web: http://www.mathworks.com/
2. ACCESO A MATLAB®
Para acceder a Matlab® basta con hacer uso del icono que encontraremos en el
escritorio de cada uno de los PCs del laboratorio. También se puede iniciar una sesión
accediendo al ejecutable a través del menú Programas.
Inicio de sesión
La pantalla inicial de Matlab® muestra una ventana con un aspecto similar a:
To get started, type one of these: helpwin, helpdesk, or demo.
For product information, type tour or visit www.mathworks.com.
»
o a:
To get started, select MATLAB Help or Demos from the Help menu.
»
El símbolo “»” indica que el programa está listo para que introduzcamos
nuestras instrucciones. Si se desea abandonar la sesión de Matlab® basta con ejecutar:
» quit
o
1
Teoría de la Comunicación - Curso 2010-2011
Tutorial de Introducción a Matlab®
» exit
Configuración del path
Una vez iniciado Matlab®, conviene configurar el directorio de ejecución actual
de los programas. Para ello, se accede al menú: File -> Set path -> Add folder, y se
selecciona la carpeta en la que estén contenido los programas. Una vez hecho ya se
podrán ejecutar los programas de nuestro directorio, tecleando su nombre en la línea de
comandos. Igualmente, puede hacer que el directorio de trabajo sea el correspondiente a
su cuenta de laboratorio sin más que seleccionarlo en Current Directory.
3. INTRODUCCIÓN DE MATRICES
Los elementos de trabajo fundamentales en Matlab® son las matrices. Si se
pretende representar un escalar se hará a través de una matriz 1x1; las matrices con una
sola fila, 1xN, o con una sola columna, Nx1, representan vectores. Además hay que
tener en cuenta que los elementos de una matriz pueden ser complejos, es decir, constar
de parte real y parte imaginaria.
En Matlab® se suele trabajar asignando estas matrices a variables con un
determinado nombre. Así, para introducir una matriz 3x3 y asignarla a una variable
denominada A podemos hacer:
» A = [1 2 3; 4 5 6; 7 8 9]
o bien:
»
1
4
7
A
2
5
8
= [
3
6
9]
Los elementos de una fila de la matriz se separan por espacios en blanco, aunque
también se pueden usar comas. Para separar cada una de las filas se utilizará punto y
coma. Se debe ser cuidadoso con el uso de espacios en blanco.
Para identificar a cada uno de los elementos de una matriz se indicará la fila y
columna correspondiente al valor deseado:
» a=A(2,2)
a =
5
De esta manera se ha identificado el elemento que se encuentra en la segunda fila y
segunda columna de la matriz A. Si se hubiera definido un vector bastaría con utilizar un
único índice para referenciar el elemento de interés. Estos índices que identifican los
elementos de una matriz deben ser siempre números enteros positivos.
2
Teoría de la Comunicación - Curso 2010-2011
Tutorial de Introducción a Matlab®
4. FUNCIONES PARA CONSTRUIR MATRICES
Para construir matrices de una forma más sencilla Matlab® dispone de muchas
funciones. Algunos ejemplos con los que se recomienda experimentar son:
eye
zeros
ones
diag
triu
tril
rand
randn
hilb
magic
toeplitz
Matriz identidad
Matriz de ceros
Matriz de unos
Ver help diag
Parte triangular superior de una matriz
Parte triangular inferior de una matriz
Matriz de elementos aleatorios (distribución uniforme)
Matriz de elementos aleatorios (distribución gaussiana)
Matriz de Hilbert
Matriz mágica
Ver help toeplitz
Si x es un vector, diag(x) es la matriz diagonal con x en su diagonal; si A es una
matriz cuadrada, entonces diag(A) es un vector formado por la diagonal de A.
Las matrices se pueden construir por bloques. Por ejemplo si A es una matriz
3x3:
» B=[A, zeros(3,2); zeros(2,3), eye(2)]
B =
1
4
7
0
0
2
5
8
0
0
3
6
9
0
0
0
0
0
1
0
0
0
0
0
1
5. OPERACIONES CON MATRICES
Las operaciones que se pueden realizar son:
+
*
^
‘
\
/
Suma
Resta
Multiplicación
Potenciación
Transposición
División izquierda
División derecha
Todas estas operaciones se pueden aplicar sobre matrices [NxM] o escalares
[1x1]. En el caso de que las dimensiones de las matrices sean incompatibles con la
operación que se pretende realizar, Matlab® mostrará un mensaje de error. No obstante,
determinadas operaciones se realizan de forma particular. Así, si a una matriz [NxM] se
le resta o suma un escalar, esta operación se realiza sobre cada uno de los elementos de
la matriz:
3
Tutorial de Introducción a Matlab®
Teoría de la Comunicación - Curso 2010-2011
» A+1
ans =
2
5
8
3
6
9
4
7
10
Es posible utilizar los operadores para realizar operaciones por coordenadas, es
decir, elemento a elemento entre las matrices involucradas en la operación. Para realizar
este tipo de operaciones se usa el operador “.”. Así, si un operador aparece precedido de
un punto ( .^, .*, .\, ./ ) la operación se realizará elemento a elemento, como en el
siguiente ejemplo, en el que se eleva al cuadrado cada valor de la matriz:
» A.^2
ans =
1
16
49
4
25
64
9
36
81
6. EXPRESIONES, VARIABLES Y SESIONES
Matlab® es un lenguaje de expresiones. Éstas son interpretadas y evaluadas.
Como se ha visto en los ejemplos previos las expresiones en Matlab® son del tipo:
» variable = expresión
o
» expresión
Una expresión estará compuesta por operadores, funciones y nombres de
variables. El resultado de evaluar una expresión es una matriz, que se mostrará por
pantalla y se almacenará en la variable indicada para su posterior uso. Si se omiten la
variable y el signo “=” se crea una variable llamada ans a la que se le asigna el
resultado de la expresión.
Una instrucción termina con un retorno de carro. Si se desea continuar con ella
en la siguiente línea basta con escribir tres (o más) puntos al final, antes del retorno de
carro, como se ilustra a continuación:
>> A=[1 2 3 4 5 6 7 8 9 ...
10; 11 12 13 14 15 ...
16 17 18 19 20]
A =
1
11
2
12
3
13
4
14
5
15
6
16
7
17
8
18
9
19
10
20
>>
Para agrupar varias instrucciones en una línea se separarán éstas por comas o
puntos y comas; aquéllas que finalicen con “;” no muestran el resultado por pantalla.
4
Teoría de la Comunicación - Curso 2010-2011
Tutorial de Introducción a Matlab®
Es necesario indicar que Matlab® es sensible al uso de mayúsculas y minúsculas,
tanto en los nombres de variables como en los de instrucciones y funciones.
Para saber qué variables hay almacenadas en nuestro espacio de trabajo se utiliza
la instrucción who:
» who
Your variables are:
A
F
G
S
Si se desea eliminar una variable de la memoria se hará:
» clear variable
Para eliminar todas las variables no permanentes bastará con teclear clear.
Es posible almacenar las variables de la sesión actual de Matlab® para utilizarlas
en una sesión posterior con la instrucción save, que genera un fichero en el disco con el
nombre matlab.mat guardando los datos de nuestra sesión. Para recuperar estos datos en
una sesión posterior se hará uso de la instrucción load. Si se desea, es posible asignar
un nombre diferente al archivo en el que se almacenan los datos de la sesión o
seleccionar qué variables guardar, tal como se explica en la ayuda del comando save.
Matlab® es un lenguaje de programación interpretado, es decir, los programas no
necesitan una compilación o enlazado previos a su funcionamiento y las expresiones
que componen una determinada secuencia de instrucciones o programa se ejecutan de
manera secuencial.
7. BUCLES. OPERADORES RELACIONALES
Matlab® tiene instrucciones para el control de flujo de los programas que actúan
de forma similar al resto de los lenguajes.
for
La forma general de un bucle for es:
for contador
instrucciones
end
Veamos un ejemplo para un valor determinado de una variable n que actúa como
límite del bucle, en concreto generaremos un vector con cuatro elementos:
» n = 4;
» x=[];for i = 1:n, x=[x,i^2], end
x =
1
5
Teoría de la Comunicación - Curso 2010-2011
Tutorial de Introducción a Matlab®
x =
1
4
1
4
9
1
4
9
x =
x =
16
Lo anterior sería equivalente a escribir:
» x=[];
» for i = 1:n
x=[x,i^2]
end
x =
1
x =
1
4
1
4
9
1
4
9
x =
x =
16
En un bucle for se puede indicar la cantidad que queremos que se incremente la
variable contador (i en este caso) en cada iteración del bucle. Por defecto i será
incrementada en una unidad por iteración. Así podemos tener un bucle for como:
» for i = n:-1:1, x=[x,i^2],end
x =
16
x =
16
9
16
9
4
16
9
4
x =
x =
1
Una anidación de bucles for puede usarse para construir una matriz, como en el
siguiente ejemplo, que proporciona la matriz Hilbert m x n. Puesto que se usa el “;” no
se muestran los resultados intermedios. El uso de H al final muestra la variable
resultado.
» m=10
m =
10
» n=5
n =
6
Teoría de la Comunicación - Curso 2010-2011
Tutorial de Introducción a Matlab®
5
» for i =1:m
for j= 1:n
H(i,j)=1/(i+j-1);
end
end
» H
H =
1.0000
0.5000
0.3333
0.2500
0.2000
0.1667
0.1429
0.1250
0.1111
0.1000
0.5000
0.3333
0.2500
0.2000
0.1667
0.1429
0.1250
0.1111
0.1000
0.0909
0.3333
0.2500
0.2000
0.1667
0.1429
0.1250
0.1111
0.1000
0.0909
0.0833
0.2500
0.2000
0.1667
0.1429
0.1250
0.1111
0.1000
0.0909
0.0833
0.0769
0.2000
0.1667
0.1429
0.1250
0.1111
0.1000
0.0909
0.0833
0.0769
0.0714
while
La forma general de un bucle while es:
while relacion
Instrucciones
end
Las instrucciones se ejecutarán mientras se cumpla la relación. Por ejemplo:
» while 2^n < a
n=n+1;
end
» n
este bucle se repetirá hasta que la relación: 2n < a, no sea satisfecha.
if, else, elseif
La forma general de una instrucción if es:
if relación
instrucciones
elseif relación
instrucciones
else
instrucciones
end
De esta forma se puede alterar el flujo secuencial de un programa. Las
instrucciones dentro del bucle if sólo se ejecutarán una vez y sólo si la relación es cierta.
Es posible tener ramificaciones múltiples:
» if n<0
paridad=0;
elseif rem(n,2) == 0
paridad=2;
7
Tutorial de Introducción a Matlab®
Teoría de la Comunicación - Curso 2010-2011
else
paridad=1;
end
Relaciones en Matlab®
Los operadores relacionales en Matlab® son:
<
>
<=
>=
==
~=
Menor que
Mayor que
Menor o igual que
Mayor o igual que
Igual
Distinto
Es importante tener en cuenta que el signo “=” se usa en las asignaciones de valor
mientras que el “==” se usa en las relaciones.
Para conectar relaciones o cuantificar las mismas se usan operadores lógicos:
&
|
~
AND
OR
NOT
Las relaciones entre escalares, es decir, entre matrices 1x1, devuelven un escalar, que
será 1 ó 0 dependiendo de si la relación es verdadera o falsa:
» 1 > 0, 1 < 0, 1 == 0, 1 ~= 0
ans =
1
ans =
0
ans =
0
ans =
1
Si la relación se aplica a matrices del mismo orden, la evaluación de ésta da lugar a una
matriz de ceros y unos, valores correspondientes a calcular la relación entre los distintos
elementos de cada matriz.
Es importante observar el correcto uso de la relación entre matrices en un bucle
while o una sentencia condicional if. Por ejemplo, en
» if a==b
instrucciones
end
8
Teoría de la Comunicación - Curso 2010-2011
Tutorial de Introducción a Matlab®
las instrucciones se ejecutarán si todos los elementos de la matriz a son iguales a los de
b. Pero, si se desea ejecutar las mismas instrucciones sólo si a y b son distintas hay que
recurrir a
» if any(any(a~=b))
instrucciones
end
o más sencillo:
» if a==b else
instrucciones
end
ya que la expresión
» if a~=b
instrucciones
end
sólo se ejecutará si todos los elementos de a son distintos a los de b. Las funciones any
y all pueden utilizarse para reducir relaciones entre matrices a relaciones entre vectores
y escalares. En el ejemplo anterior se requieren dos any porque éste es un operador
vectorial.
8. FUNCIONES ESCALARES
Las funciones más comunes de Matlab® que operan sobre magnitudes escalares
o sobre matrices elemento a elemento son:
sin
cos
tan
asin
acos
atan
rem
log
exp
abs
sqrt
sign
ceil
floor
round
Se puede obtener más información sobre cada una de estas funciones escalares con el
comando help.
9. FUNCIONES VECTORIALES
Otras funciones operan sobre vectores fila o columna, o sobre matrices mxn (con
m ≥ 2). En este último caso operan columna a columna y proporcionan como resultado
un vector fila cuyos elementos son las evaluaciones de la operación sobre cada columna.
El siguiente ejemplo hace uso del comando mean, que calcula la media de los elementos
de un vector.
a =
0.9501
0.2311
0.6068
0.4860
0.8913
0.7621
0.4565
0.0185
0.8214
0.4447
0.6154
0.7919
0.9218
0.7382
0.1763
» mean(a)
9
0.4057
0.9355
0.9169
0.4103
0.8936
0.0579
0.3529
0.8132
0.0099
0.1389
Teoría de la Comunicación - Curso 2010-2011
Tutorial de Introducción a Matlab®
ans =
0.6331
0.5006
0.6487
0.7124
0.2745
0.5006
0.6487
0.7124
0.2745
» mean(a,1)
ans =
0.6331
El resultado de los comandos mean(a) y mean(a,1) es el mismo debido a que el
segundo argumento de mean se refiere a la dimensión sobre la que se efectuará la
operación. En el caso de operar sobre las columnas el escalar valdrá 1, mientras que si
actuamos sobre las filas su valor será 2. Si se desea aplicar la operación a las filas basta
con usar la matriz traspuesta – por ejemplo mean(a')' nos proporciona un vector
columna con las medias calculadas para cada fila – o el comando mean(a,2):
» mean(a')
ans =
0.5583
0.5536
0.6554
0.4931
0.5090
» mean(a')'
ans =
0.5583
0.5536
0.6554
0.4931
0.5090
» mean(a,2)
ans =
0.5583
0.5536
0.6554
0.4931
0.5090
Algunas de las funciones vectoriales empleadas con mayor frecuencia son:
max
min
sum
prod
median
mean
any
all
sort
std
Se puede obtener más información sobre cada una de estas funciones vectoriales con el
comando help.
10. FUNCIONES MATRICIALES
Matlab® dispone de multitud de funciones matriciales. Es conveniente tener en
cuenta que los argumentos de salida para una función en Matlab® pueden ser simples o
múltiples. Por ejemplo:
y = eig(A),
o simplemente eig(A)
10
Teoría de la Comunicación - Curso 2010-2011
Tutorial de Introducción a Matlab®
proporciona un vector columna con los autovalores de A. Mientras que
[U,D] = eig(A)
genera una matriz U cuyas columnas son los autovectores de A y una matriz diagonal D
con los autovalores de A en su diagonal.
11. SUBMATRICES Y NOTACIÓN DE DOS PUNTOS
Los vectores y submatrices son utilizados a menudo en Matlab® para conseguir
efectos de manipulación bastante complejos. La “notación de dos puntos” se utiliza para
generar vectores o submatrices. El uso conjunto de esta notación con la adecuada
indexación por vectores son claves para realizar cálculos en Matlab® de forma eficiente,
minimizando el número de bucles, que hacen la ejecución de los programas más lenta.
Además, las instrucciones parecen más sencillas y legibles. Veamos un ejemplo de
“notación de dos puntos”:
» 1:5
ans =
1
2
3
4
5
Resulta que 1:5 es en realidad el vector mostrado en la variable ans. Los números
pueden no ser enteros y el incremento diferente de la unidad. Por ejemplo:
» 0:0.2:1
ans =
0
0.2000
0.4000
0.6000
0.8000
1.0000
El siguiente ejemplo muestra cómo generar una función sinusoidal sin usar un
bucle for con una variable haciendo de contador:
» x=[0.0:0.1:2*pi]’
» y=sin(x)
» plot(x,y)
Mediante la notación de dos puntos se puede acceder a submatrices. Por
ejemplo, A(1:4,3) es el vector columna con las cuatro primeras entradas de la tercera
columna de A.
Dos puntos sin más especificación denotan una fila o columna completa. Así,
es la tercera columna de A y A(1:4,:) serán las cuatro primeras filas.
Igualmente, se pueden usar como índices vectores enteros arbitrarios. Por ejemplo,
A(:,[2 4]) serán las columnas segunda y cuarta de A. Otro ejemplo más elaborado
podría ser A(:, [2 4 5]) = B(:,1:3), que reemplaza las columnas 2, 4 y 5 de A por
las tres primeras de B, asignando el resultado a la matriz A.
A(:,3)
Podemos usar esta notación para trabajar con submatrices de forma eficiente y
sin utilizar bucles. Así, la instrucción A(:,[2,4])=A(:,[2,4])*[1 2;3 4] multiplica
11
Teoría de la Comunicación - Curso 2010-2011
Tutorial de Introducción a Matlab®
las columnas 2 y 4 de A por una matriz 2x2 y el resultado se asigna de nuevo a la matriz
completa.
12. ARCHIVOS .m
En Matlab® es posible ejecutar una secuencia de instrucciones almacenadas en
un archivo de disco. Estos archivos se denominan “archivos .m” porque su extensión
debe ser “.m”. Pueden ser de dos tipos: de funciones y de instrucciones.
Archivos de instrucciones. Scripts
Estos archivos “.m” consisten en una sucesión de instrucciones normales de
Matlab .Si tuviéramos un archivo denominado nombre.m, las instrucciones del archivo
pueden ser ejecutadas sin más que escribir nombre. Las variables en un archivo de este
tipo se consideran como globales y por lo tanto alterarán los valores de las variables del
espacio de trabajo.
®
Los archivos de instrucciones se utilizan para cargas de datos en matrices de
tamaño considerable, o cuando estas cargas son repetitivas, ya que es sencillo corregir
errores sin tener que repetir todo el trabajo. Por ejemplo el archivo datos.m que incluye
el siguiente contenido:
a=[
1 2 3 4
5 6 7 8
];
hará que al ejecutar datos se cargue la variable a con el valor especificado en el espacio
de trabajo. Además este archivo puede hacer referencia a otros.
Resulta muy habitual emplear los archivos de instrucciones es como scripts. Los
scripts no aceptan ningún tipo de argumento de entrada ni devuelven ningún argumento
de salida y trabajan con datos situados en el espacio de trabajo (workspace). Los scripts
son muy útiles dado que, al invocarlos, Matlab® simplemente ejecuta los comandos
presentes en el fichero. Los scripts pueden trabajar con datos existentes en el espacio de
trabajo o pueden crear nuevos datos con los que operar. Aunque hemos mencionado que
los scripts no devuelven argumentos de salida, cualquier variable creada por ellos
permanece en el espacio de trabajo, por lo que puede emplearse en cálculos posteriores.
La utilidad de los scripts podrá comprobarse a lo largo de las prácticas de la asignatura.
Archivos de funciones
Mediante estos archivos Matlab® extiende sus capacidades de cálculo, creando
funciones específicas para la resolución de tareas concretas. Estas funciones tendrán el
mismo rango que cualquier otra de las existentes en el sistema. En este caso las
variables empleadas serán locales a cada función, y si se pretende usar una variable
como global habrá que declararla como tal explícitamente. Veamos un ejemplo sencillo
con el archivo ental.m, cuyo contenido es
12
Teoría de la Comunicación - Curso 2010-2011
Tutorial de Introducción a Matlab®
function a = ental(m,n)
%ENTAL Matriz generada aleatoriamente
% ental(m,n) produce una matriz con mxn entradas
% enteras entre 0 y 9
a = floor(10*rand(m,n));
Una versión más general de esta función es:
function a = ental(m,n,b,c)
%ENTAL Matriz generada aleatoriamente
% ental(m,n) produce una matriz con mxn entradas
% enteras entre 0 y 9
% ental(m,n,b,c) da las entradas de la matriz entre b y c
if nargin < 3, b=0; c=9; end
a = floor((c-b+1)*rand(m,n))+b;
La primera línea del archivo ental.m contiene el nombre de la función, así como los
argumentos de entrada y de salida de la misma. Sin esta línea el archivo se consideraría
como uno de instrucciones. Así la instrucción z = ental(4,5) hará que los números 4
y 5 pasen a las variables m y n en el archivo de función. El resultado se asignará a la
variable z. Como las variables en un archivo de función son locales, sus nombres son
independientes de los que se encuentren en el espacio de trabajo.
El uso de nargin (número de argumentos de entrada) permite asignar un valor
por defecto a una variable de entrada que se omita, como b y c en el ejemplo.
Los argumentos de salida también pueden ser múltiples. Por ejemplo:
function [w,ierr] = bessel(nu,z)
%BESSEL Bessel functions of various kinds.
%
Bessel functions are solutions to Bessel's differential
%
equation of order NU:
%
2
2
2
%
x * y'' + x * y' + (x - nu ) * y = 0
%
%
There are several functions available to produce solutions to
%
Bessel's equations. These are:
%
%
BESSELJ(NU,Z)
Bessel function of the first kind
%
BESSELY(NU,Z)
Bessel function of the second kind
%
BESSELI(NU,Z)
Modified Bessel function of the first kind
%
BESSELK(NU,Z)
Modified Bessel function of the second kind
%
BESSELH(NU,K,Z) Hankel function
%
AIRY(K,Z)
Airy function
%
%
See the help for each function for more details.
%
%
Copyright (c) 1984-98 by The MathWorks, Inc.
$Revision: 5.8 $ $Date: 1997/11/21 23:45:04 $
[w,ierr] = besselj(nu,z);
En el caso de que se usen argumentos de salida múltiples también es posible
hacer asignaciones simples al primero de los parámetros de salida.
El símbolo % indica que el resto de la línea es un comentario; así Matlab® lo
ignorará durante la ejecución del código. Las primeras líneas de comentarios de un
13
Teoría de la Comunicación - Curso 2010-2011
Tutorial de Introducción a Matlab®
archivo de función pueden consultarse con la instrucción help. Es imprescindible
incluir esta documentación en cada archivo para una correcta clasificación y
reutilización de nuestras propias funciones.
Matlab® dispone de funciones internas, construidas en el propio código del
programa, y otras que se entregan como archivos “.m”. Se recomienda la inspección de
dichos archivos, que pueden servir al alumno como fuente de inspiración a la hora de
crear sus propias funciones. Para ver un archivo desde la línea de comandos de Matlab®
usando el editor integrado en la aplicación basta teclear edit funcion.m. Las ventajas
de crear funciones propias podrán comprobarse a lo largo de las prácticas de la
asignatura.
13. CADENAS DE TEXTO, MENSAJES DE ERROR, INPUT
Las cadenas de texto se introducen entre comillas simples. Por ejemplo:
s = ‘Esto es una cadena de texto de prueba’
Las cadenas de texto pueden mostrarse con la instrucción disp:
disp(‘Esto es un mensaje’)
Para el caso en el que se desee mostrar algún tipo de mensaje de error resulta
más aconsejable emplear la función error:
error(‘Lo siento, esto es un mensaje de error’)
La diferencia entre las dos opciones consiste en que al emplear error se finaliza la
ejecución del archivo “.m”.
Para la introducción de datos de manera interactiva se usa input. Si Matlab®
encuentra la instrucción input durante la ejecución de un script o de un archivo de
función, mostrará la cadena de texto asociada y parará la ejecución hasta que el usuario
introduzca los datos. Estos se asignarán a la variable correspondiente tras el retorno de
carro, continuando inmediatamente con la ejecución del programa.
14. DEPURACIÓN DE FUNCIONES
Matlab® dispone de herramientas para depurar funciones en archivos “.m”.
Algunas de éstas son:
dbstop
dbclear
dbcont
dbdown
dbstack
dbstatus
dbstep
dbtype
Fija un breakpoint
Elimina un breakpoint
Reanuda la ejecución
Cambia el contexto de ejecución local
Indica desde donde se llamó a una función
Lista todos los breakpoints
Ejecuta una o más líneas
Lista un fichero “.m” con números de línea
14
Teoría de la Comunicación - Curso 2010-2011
dbup
Tutorial de Introducción a Matlab®
Cambia el contexto de ejecución local
15. GRÁFICOS E INTERFACES GRÁFICAS
Matlab® permite dibujar gráficos planos y de malla de superficies
tridimensionales.
Gráficos planos
La función plot crea gráficos en el plano XY; si x e y son vectores de la misma
longitud, la orden plot(x,y) accede a la pantalla gráfica y realiza un gráfico plano de
los elementos de y frente a los elementos de x. Intente dibujar de esta forma la función
seno sobre el intervalo [-2*π,2*π], con un paso de 0.01, teniendo en cuenta que la
función sin es vectorial.
Si realiza un nuevo gráfico, éste se dibujará sobre el anterior. Si desea mantener
el primer gráfico se debe emplear la función hold; con hold on y hold off congela y
libera la pantalla gráfica actual. La instrucción grid dibujará una cuadrícula de
referencia sobre el gráfico. Puede emplear el comando figure para realizar
representaciones en diferentes ventanas. Como prueba, muestre un gráfico de la función
y = e − x con un paso de 0.01 sobre el intervalo [-1.5,1.5].
2
Para poner títulos, etiquetas y comentarios en los ejes de los gráficos se emplean
los comandos title, xlabel, ylabel, gtext, text. Experimente con ellos. La escala
de los ejes se ajusta automáticamente al pintar el gráfico, por lo que si desea fijar los
ejes con unos valores determinados deberá usar el comando axis. La entrada de axis es
un vector de 4 elementos de la forma [xmin, xmax, ymin, ymax]. El uso de axis congela
el escalado para los siguientes gráficos que muestre. Para volver al escalado automático
se emplea la función axis sin argumentos. Puede ver más utilidades de este comando
con help axis.
En Matlab® también puede obtener gráficos de funciones múltiples formando
una matriz con los valores de dichas funciones como columnas. El siguiente ejemplo
representa tres funciones sinusoidales:
x=0:.01:2*pi; Y=[sin(x)’,sin(2*x)’,sin(4*x)’]; plot(x,Y)
Otra de las características de las representaciones gráficas en Matlab® es la
posibilidad de realizar cambios en los tipos de línea y de punto asignados por defecto.
Teclee help plot y experimente con ello.
Para finalizar, el comando subplot permite visualizar varios gráficos a la vez en
la pantalla. Este comando divide la ventana de representación de figuras en una matriz
mxn. Posteriormente es necesario seleccionar la posición concreta en la que se quiere
representar cada figura. La ayuda de Matlab® proporciona ejemplos ilustrativos acerca
del uso combinado de plot y subplot.
15
Teoría de la Comunicación - Curso 2010-2011
Tutorial de Introducción a Matlab®
Interfaces gráficas
Es posible construir interfaces gráficas para permitir al usuario una interacción
más fácil con las herramientas desarrolladas. Proporcionar las nociones básicas del
manejo de elementos gráficos está fuera de los objetivos de este tutorial. No obstante,
puede ser interesante para el alumno aprender a manejar esta característica de Matlab®
con el fin de presentar más fácilmente los resultados obtenidos en los ejercicios y
realizar una programación estructurada en la resolución de cada uno de ellos.
BIBLIOGRAFÍA
[1] The Mathworks, Manual de usuario de Matlab®.
16
UNIVERSIDAD DE VALLADOLID
E.T.S. INGENIEROS DE TELECOMUNICACIÓN
TEORÍA DE LA COMUNICACIÓN
Práctica 1: Introducción a la simulación de
señales y sistemas
Teoría de la Comunicación - Curso 2010-2011
Práctica 1
1. OBJETIVOS
Con esta primera práctica se pretende que el alumno sea capaz de simular los
conocimientos teóricos adquiridos sobre señales y sistemas lineales. Para ello deberá
realizar una serie de programas de Matlab® que le permitirán:
1.
2.
3.
4.
Calcular transformadas de Fourier.
Ver e interpretar espectros de señales.
Obtener el equivalente paso bajo de señales paso banda.
Trabajar con procesos aleatorios.
Debido al limitado número de sesiones de laboratorio disponibles, resulta MUY
RECOMENDABLE plantearse la resolución de los ejercicios antes de la
correspondiente sesión práctica. De este modo es posible sacar el máximo partido al
tiempo pasado en el laboratorio.
Asimismo, con el objetivo de facilitar la comprensión de los conceptos de Teoría
de la Comunicación, complementando las explicaciones teóricas y las prácticas de
laboratorio, se encuentra disponible en http://www.gib.tel.uva.es/tc un tutorial vía web.
Cada tema de la asignatura tiene una serie de applets de Java que permiten simular
diferentes conceptos teóricos, evaluando la importancia de los diferentes parámetros que
entran en juego. Cada applet se identifica como TemaxApplety.html, siendo x el número
del tema e y el número del applet. A lo largo del enunciado de las prácticas de
laboratorio se mencionarán los applets que pueden resultar útiles en cada caso. Es
necesario instalar JRE 1.5 para poder utilizarlo (disponible en la web de la asignatura
alojada en http://www.tel.uva.es).
2. SEÑALES EN TIEMPO Y EN FRECUENCIA
En este primer apartado se pretende que el alumno sea capaz de generar y
visualizar correctamente señales en el dominio del tiempo y en el de la frecuencia,
haciendo uso de las funciones que proporciona Matlab®. Para ello se recomienda
consultar el toolbox ‘Signal Processing’, fijándose especialmente en las funciones de las
categorías ‘Waveform Generation’ y ‘Transforms’.
Considere las siguientes señales definidas en el tiempo:
•
•
•
•
•
x1 (t ) = cos(2πf c t )
x2(t) = sinc(at)
x3 (t ) = Λ (t )
t − t0
x 4 (t ) = Λ
T
0
t
t − t0
x5 (t ) = Π + b ⋅ Π
T1
T2
(1)
(2)
(3)
(4)
(5)
1
Teoría de la Comunicación - Curso 2010-2011
Práctica 1
Los parámetros de las mismas vienen dados por: fc = 200 Hz, a = 0.5, t0 = 0.1 s,
T0 = 0.01 s, T1 = 0.05 s, T2 = 0.025 s y b = 2 V. Además:
t
1 − , t < τ
Λ( ) = τ
τ 0, resto
t
•
•
(6)
Genere un vector de tiempos, a partir de una frecuencia de muestreo (fs) que
considere adecuada para cada señal. La opción más recomendable consiste
en definir el vector de la forma t = [tinicial:1/fs:tfinal], donde
tinicial y tfinal representan los extremos del intervalo temporal de
trabajo y fs es la frecuencia de muestreo1. De este modo el vector tendrá un
determinado número de muestras N = length(t) que dependerá de los
valores de tinicial, tfinal y fs.
Visualice en tiempo las señales anteriores, mediante el comando plot. Para
escalar convenientemente la señal puede resultar útil el comando axis.
Una vez definidas las señales en el tiempo, se va a calcular el espectro de las
mismas, para lo cual se hará uso de la transformada de Fourier. Ha de tener en cuenta
que en Matlab® se trabaja con señales discretas x[n], es decir, con secuencias de N
muestras, separadas TS (período de muestreo). El primer paso para obtener una señal de
este tipo consiste en tomar muestras de la señal continua en instantes de tiempo
separados TS:
xδ (t ) =
∞
∑ x(nTS )δ (t − nTS )
(7)
n = −∞
Si se calcula la transformada de Fourier de la misma se obtiene:
Xδ ( f ) =
1
TS
∞
∑
n = −∞
X(f −
n
)
TS
(8)
En el caso de que se parta directamente de una secuencia discreta, x[n], como
ocurre en Matlab®, la expresión de la transformada de Fourier discreta (DFT, Discrete
Fourier Transform) es:
Xd (f ) =
∞
∑ x[n]⋅ e − j 2πfnT
S
(9)
n = −∞
Para reducir la carga computacional asociada, Matlab® implementa la DFT
mediante el algoritmo de la transformada rápida de Fourier (FFT, Fast Fourier
Transform). El comando correspondiente es fft, que suele combinarse con la función
fftshift. La frecuencia más alta con significado físico real visible mediante el
comando fft es la mitad de la frecuencia de muestreo. Esto hay que tenerlo en cuenta
cuando se vayan a representar los espectros.
1
Para la mayor parte de las señales que analizaremos a lo largo del curso es recomendable emplear
para así tener un intervalo simétrico con respecto a t = 0.
tinicial = -tfinal
2
Teoría de la Comunicación - Curso 2010-2011
•
•
•
Práctica 1
Calcule de manera analítica la transformada de Fourier de las señales x1(t),
x2(t), x3(t), x4(t) y x5(t). Visualice en el dominio de la frecuencia las
expresiones obtenidas con el comando plot. Para generar el vector de
frecuencias correspondiente puede resultar útil el comando linspace.
Partiendo de las señales en el tiempo del apartado anterior (x1(t), x2(t), x3(t),
x4(t) y x5(t)) y de la frecuencia de muestreo seleccionada, calcule
numéricamente los espectros de las mismas. Represente el valor absoluto de
los resultados, utilizando las funciones abs y plot. ¿Por qué piensa que ha
de tomarse el valor absoluto de la transformada de Fourier?
Compare los espectros obtenidos de forma analítica con los obtenidos de
manera numérica. En caso de que no coincidan, indique si es necesario
introducir algún factor de escala en el cálculo numérico, teniendo en cuenta
si las señales están definidas en energía o en potencia. Si ha definido el
vector de tiempos de la manera indicada anteriormente, su programa tan sólo
dependerá de dos variables: la frecuencia de muestreo y el número de
muestras del vector de tiempos.
Con el applet disponible en http://www.gib.tel.uva.es/tc/Tema1Applet1.html es
posible estudiar diferentes propiedades de la transformada de Fourier (escalado,
desplazamiento en tiempo y desplazamiento en frecuencia) de una función sinc para así
comprobar si los resultados previamente obtenidos con Matlab® se ajustan a lo
esperado. De manera análoga en http://www.gib.tel.uva.es/tc/Tema1Applet2.html se
puede calcular la transformada de Fourier de varias señales tipo (coseno, sinc y pulso
rectangular) para contrastar las figuras con los resultados obtenidos con Matlab®.
Para cuantificar la distribución en frecuencia de la energía o la potencia de una
señal se recurre a una magnitud denominada densidad espectral.
•
•
•
Calcule analíticamente la densidad espectral de las señales anteriores.
Calcule numéricamente y represente la densidad espectral de las señales
anteriores (x1(t), x2(t), x3(t), x4(t) y x5(t)), teniendo en cuenta si están
definidas en energía o en potencia antes de realizar los cálculos. Para generar
la función de autocorrelación puede resultar útil el comando xcorr.
Compare los espectros obtenidos de forma analítica con los obtenidos de
manera numérica.
3. MODELADO PASO BAJO EQUIVALENTE
En este apartado se va a estudiar la representación equivalente paso bajo de una
señal paso banda. Para ello, se hará uso de la transformada de Hilbert, que puede
realizarse en Matlab® con el comando hilbert, si bien el mismo merece especial
atención. Por ello, se recomienda consultar la ayuda de esta función antes de emplearla.
Sean x 6 (t ) y x 7 (t ) las señales definidas como:
•
x 6 (t ) =
3
⋅ sen(10πt) ⋅ cos(2π ⋅ 500 t )
5πt
3
(10)
Teoría de la Comunicación - Curso 2010-2011
•
Práctica 1
x7 (t ) = 25 ⋅ Λ(10t) ⋅ cos(2π ⋅ 400t )
(11)
Suponiendo que la frecuencia de muestreo es
programa de Matlab® para calcular y representar:
f S = 2000 Hz , realice un
•
Las señales x 6 (t ) y x 7 (t ) .
•
Los módulos del espectro de cada señal, es decir, X 6 ( f ) y X 7 ( f ) .
•
•
•
•
La densidad de espectral de x 6 (t ) y x 7 (t ) .
Los módulos de los espectros de las señales analíticas positivas y negativas
correspondientes a cada una de las dadas.
Los espectros de las señales equivalentes paso bajo.
Las componentes en fase y cuadratura de x 6 (t ) y x 7 (t ) .
•
La envolvente natural de x 6 (t ) y x 7 (t ) .
Las funciones angle, real e imag, además de la ya mencionada hilbert,
pueden resultarle útiles en la resolución del problema. Consulte la ayuda para saber el
modo de empleo de cada una de ellas.
4. PROCESOS ALEATORIOS PASO BANDA
En este último apartado se van a analizar los procesos aleatorios, estudiando dos
formas de ruido: el ruido blanco gaussiano y el ruido de banda estrecha.
El ruido blanco gaussiano se caracteriza porque su densidad espectral de
potencia es constante:
SW ( f ) =
N0
2
(12)
SW ( f ) vendrá dada en W/Hz. Dado que SW ( f ) es constante y no depende de la
frecuencia, la función de autocorrelación del ruido blanco es una delta en el origen, cuya
magnitud es la de la densidad espectral de potencia.
Para generar ruido blanco gaussiano, se puede usar la función wgn. La siguiente
línea de código permite crear un vector fila de ruido blanco gaussiano con media nula
especificando la densidad espectral de potencia:
Ruido_blanco = wgn(1,N,N0/2,’linear’,’real’);
Otra opción consiste en utilizar la función randn, que genera datos gaussianos
de media nula y varianza (σ2) unidad. Es posible emplearla para generar un vector fila
de datos gaussianos con diferente media y varianza como sigue:
Datos_gaussianos = media+sqrt(varianza)*randn(1,N);
4
Teoría de la Comunicación - Curso 2010-2011
Práctica 1
Si se aproxima la varianza del ruido blanco gaussiano por el valor de la densidad
espectral de potencia, podremos generar un vector de media nula y varianza igual a N0/2
con la siguiente línea de código:
Ruido_blanco = sqrt(N0/2)*randn(1,N);
•
•
Genere un vector de ruido blanco gaussiano de media cero, N0 = 10 W/Hz y
10000 muestras con las dos opciones especificadas anteriormente.
Visualice la función de autocorrelación (asuma que la frecuencia de
muestreo es fs = 4000 Hz) y la densidad espectral de potencia de los procesos
de ruido generados. Analice los resultados.
Cuando el proceso de ruido tiene un espectro en potencia mucho mayor en las
frecuencias en torno a una central (± fc), que en el resto, se dice que el proceso es paso
banda. Por ello, al igual que las señales paso banda deterministas, puede representarse
en su forma canónica. Si además se cumple que su ancho de banda es suficientemente
pequeño en relación a esta frecuencia central (fc >> B), podemos decir que el proceso de
ruido es de banda estrecha. Una forma de generar un proceso de ruido de este tipo
consiste en aplicar un filtro paso banda, de anchura B en un entorno de fc, a un proceso
de ruido blanco.
•
•
Analice la respuesta del filtro paso banda, especificado por los coeficientes a
y b2. ¿Cuál es la frecuencia central del mismo (fc), así como el ancho de
banda correspondiente (B), teniendo en cuenta que la frecuencia de muestreo
es: fs = 4000 Hz? Para ello se recomienda consultar la función fvtool.
Genere un ruido de banda estrecha centrado en fc con ancho de banda B, a
partir del proceso de ruido blanco generado anteriormente. Calcule y
visualice su densidad espectral de potencia. Para filtrar el ruido blanco
emplee la función de Matlab® filter(b,a,n), siendo a y b los vectores de
coeficientes del punto anterior y n el vector que contiene las muestras de la
señal ruidosa.
Otra forma alternativa para generar ruido de banda estrecha consiste en emplear
procesos ruidosos paso bajo. Al igual que en el caso de las señales deterministas, un
proceso aleatorio paso banda puede representarse como:
X (t ) = X C (t ) cos(2πf 0t ) − X S (t ) sen(2πf 0t ) ,
(13)
donde X C (t ) y X S (t ) son las componentes en fase y en cuadratura de X (t ) . Los
procesos aleatorios X C (t ) y X S (t ) son paso bajo.
BIBLIOGRAFÍA
[1] S. Haykin, Communication Systems, John Wiley & Sons, 4rd edition, 2001.
2
Los vectores de coeficientes, están disponibles en la página web de la asignatura (alojada dentro del
dominio www.tel.uva.es), en el archivo coeficientes.mat. Para cargarlos en el espacio de trabajo debe
emplear el comando load.
5
Teoría de la Comunicación - Curso 2010-2011
Práctica 1
[2] A.V. Oppenheim and R.W. Schafer, Discrete-Time Signal Processing, Englewood
Cliffs, NJ: Prentice-Hall, 1989.
[3] The Mathworks, Manual de usuario de Matlab®.
6
UNIVERSIDAD DE VALLADOLID
E.T.S. INGENIEROS DE TELECOMUNICACIÓN
TEORÍA DE LA COMUNICACIÓN
Práctica 2: Modulación en amplitud.
Modulación en frecuencia. Ruido en
modulaciones analógicas
Teoría de la Comunicación - Curso 2010-2011
Práctica 2
1. OBJETIVOS
Con esta segunda práctica se pretende que el alumno comprenda los conceptos
teóricos fundamentales de las modulaciones analógicas. Para ello se simularán la
modulación AM convencional, la modulación SSB, la influencia del sincronismo en la
modulación DSB-SC y la distorsión en FM de banda estrecha. Asimismo, también se
estudiará la influencia del ruido en la modulación AM convencional.
Antes de comenzar la realización de la práctica se recomienda consultar el
toolbox ‘Signal Processing’, fijándose especialmente en las funciones de la categoría
‘Specialized Operations’. Debido al limitado número de sesiones de laboratorio
disponibles, resulta MUY RECOMENDABLE plantearse la resolución de los
ejercicios antes de la correspondiente sesión práctica. De este modo es posible sacar el
máximo partido al tiempo pasado en el laboratorio.
2. MODULACIÓN EN AMPLITUD
2.1. Modulación AM convencional
Sea m(t) la señal de datos que se quiere transmitir y c(t) una señal portadora, es
decir, c(t ) = Ac cos(2πf c t ) . Si modulamos la señal de datos m(t) con AM convencional
con sensibilidad ka, la señal modulada s(t) vendrá dada por la expresión:
s (t ) = Ac [1 + ka m(t )]cos(2πf c t )
(1)
La envolvente de la señal s(t) tiene la misma forma que m(t) siempre que
k a m(t ) < 1 . En caso contrario se produce sobremodulación.
La transformada de Fourier de la señal s(t) es:
S( f ) =
Ac
[δ ( f − f c ) + δ ( f + f c )] + k a Ac [M ( f − f c ) + M ( f + f c )]
2
2
(2)
La potencia de la señal modulada es:
Ps =
[
Ac2
1 + k a2 P
2
]
(3)
En la expresión (3), P es la potencia de la señal moduladora. La eficiencia en
potencia de la modulación se obtiene como el cociente entre la potencia empleada para
transmitir el mensaje de datos y la potencia total en la señal modulada. Para el caso de
una señal modulada con AM convencional:
η=
k a2 P
1 + k a2 P
1
(4)
Teoría de la Comunicación - Curso 2010-2011
Práctica 2
Sea la señal:
m(t ) = Am cos(2πf m t )
(5)
Considere que k a = 0.85 , Am = 1 V, fm = 100 Hz y que la frecuencia de la portadora c(t)
es de 250Hz. Suponiendo que no hay ruido en el canal de comunicaciones, realice las
siguientes tareas con Matlab®:
•
•
•
•
•
•
Obtenga la señal s(t) con la fórmula (1) a partir de m(t), c(t) y ka. Tenga en
cuenta que Ac = 1 V . ¿Hay sobremodulación?
Represente m(t) y s(t) en el intervalo 0 ≤ t ≤ 0.15 s 1.
Calcule las transformadas de Fourier de m(t) y s(t) y represéntelas. Para ello,
tenga en cuenta todas las consideraciones respecto al cálculo de los espectros y a
la visualización de señales de la práctica anterior.
Determine la potencia de m(t) y s(t). Para ello puede resultarle útil la función
xcorr.
Calcule la eficiencia de la modulación.
Recupere la señal m(t) a partir de s(t) con un detector de envolvente. Utilice las
líneas de código del programa que crease en la práctica 1 para el cálculo de la
envolvente natural de señales. Tenga en cuenta que, una vez obtenida la
envolvente de s(t), su expresión será similar a v(t ) = Ac [1 + k a m(t )] . Si Ac = 1,
puede eliminar la componente de continua y recuperar la señal moduladora con
la siguiente expresión, en la que env hace referencia a la envolvente previamente
calculada:
dem1=(env-1)/k_a;
•
•
¿Qué sucedería si la señal moduladora fuera m2 (t ) = 3m(t ) ?
Repita los pasos anteriores empleando adecuadamente las funciones modulate y
®
demod de Matlab . ¿Qué método ha de seleccionar para realizar la modulación
AM con el comando modulate? ¿Es posible realizar la demodulación con un
detector de envolvente empleando el comando demod?
En http://www.gib.tel.uva.es/tc/Tema2Applet1.html es posible estudiar la
modulación AM con dos señales moduladoras diferentes (coseno y sinc) y así
comprobar si los resultados previamente obtenidos con Matlab® se ajustan a lo
esperado.
2.2. Modulación SSB
En la modulación SSB sólo se transmite una banda lateral de las dos que
componen la modulación DSB-SC, introducida de manera implícita en el segundo
ejercicio de la práctica anterior. Así se consigue ocupar un menor ancho de banda en la
transmisión de la señal. La expresión general de la señal SSB es:
1
Se recomienda emplear un intervalo temporal de mayor duración para definir las señales y,
posteriormente, ajustar la representación con axis.
2
Teoría de la Comunicación - Curso 2010-2011
s (t ) =
Práctica 2
1
1 ^
Ac m(t ) cos(2πf c t ) ± Ac m(t ) sin (2πf c t )
2
2
(6)
Cuando en (6) se emplea el signo menos, la banda transmitida es la superior. De manera
análoga, cuando se utiliza el signo más, lo que se transmite es la banda inferior.
Considere la señal:
m(t ) = Am cos(2πf m t ) ,
(7)
con Am = 4 V y f m = 100 Hz .
•
•
•
•
Obtenga la señal s(t) para modulación SSB con banda lateral superior y con
banda lateral inferior a partir de (7). Considere que Ac = 1 V y f c = 200 Hz .
Represente m(t) y s(t) (para los dos tipos de modulación SSB) en el intervalo
−1≤ t ≤1 s .
Calcule las transformadas de Fourier de m(t) y s(t) y represéntelas correctamente
(es decir, tenga en cuenta que todo lo visto en la primera práctica acerca del
cálculo y visualización de transformadas de Fourier con Matlab® sigue siendo
aplicable aquí). Compruebe que se está transmitiendo la banda adecuada en cada
caso.
Repita los pasos anteriores empleando adecuadamente la función modulate de
Matlab®.¿Qué método ha de seleccionar para realizar la modulación AM con el
comando modulate? ¿Es posible simular la transmisión de la banda lateral
inferior con este comando? ¿Y la transmisión de la banda lateral superior?
2.3. Modulación QAM
En este apartado simularemos la modulación QAM, que permite transmitir dos
señales de información diferentes, de ancho de banda W, ocupando un ancho de banda
total de 2W. La señal transmitida viene dada por la expresión:
s (t ) = Ac m1 (t ) cos(2πf c t ) + Ac m 2 (t ) sin (2πf c t )
(8)
Considere las señales m(t) y m’(t), que van a ser las moduladoras que
empleemos, con Am = 1V, fm = 50Hz, Am' = 2V y f m' = 100 Hz :
m(t ) = Am cos(2πf m t )
(
m ' (t ) = Am' sin 2πf m' t
)
(9)
(10)
Suponga que la frecuencia portadora es fc = 800 Hz y que Ac = 1V. Con estos
parámetros:
3
Teoría de la Comunicación - Curso 2010-2011
•
•
•
•
•
•
Práctica 2
Genere la señal s(t) a partir de la ecuación (8). Considere como componente
en fase m(t), y como componente en cuadratura m’(t).
Represente s(t) en el intervalo 0 ≤ t ≤ 0.05 s .
Calcule la transformada de Fourier de s(t) y represéntela para el intervalo de
frecuencias [-1000, 1000] Hz. Para ello, tenga en cuenta todas las
consideraciones respecto al cálculo de los espectros y a la visualización de
señales de la práctica anterior.
Compare los resultados con los que se obtendrían empleando el comando de
Matlab® modulate a la hora de generar s(t).
Recupere las señales de información m(t) y m’(t), a partir de la señal
modulada anteriormente, haciendo uso del comando demod.
Represente m(t) y m’(t) en el intervalo 0 ≤ t ≤ 0.1 s .Visualice también en
frecuencia las señales demoduladas en el intervalo [-500, 500] Hz.
3. MODULACIÓN EN FRECUENCIA
3.1. Modulación FM de banda estrecha
La modulación en frecuencia FM es no lineal. En este caso la amplitud de la
señal es constante y la señal de datos m(t) se emplea para modificar la fase de la
portadora. La expresión general de la señal modulada FM es:
s (t ) = Ac cos 2πf c t + 2πk f
∫ m(t )dt
t
0
(11)
El término kf representa la sensibilidad en frecuencia del modulador. La frecuencia
instantánea es:
f i (t ) = f c + k f m(t )
(12)
Cuando la señal moduladora es un tono ( m(t ) = Am cos(2πf m t ) ), la ecuación (12)
se transforma en:
f i (t ) = f c + k f Am cos(2πf m t ) = f c + ∆f cos(2πf m t )
(13)
La fase θ i (t ) será:
t
θ i (t ) = 2πf c t + 2πk f ∫ m(t )dt = 2πf c t +
0
∆f
sen(2πf m t ) = 2πf c t + βsen(2πf m t )
fm
(14)
β es el índice de modulación:
β=
∆f k f Am
=
fm
fm
4
(15)
Teoría de la Comunicación - Curso 2010-2011
Práctica 2
Por lo tanto, la señal FM modulada por un tono puede expresarse como:
s (t ) = Ac cos[2πf c t + β ⋅ sen(2πf m t )]
(16a)
En http://www.gib.tel.uva.es/tc/Tema3Applet1.html se puede simular la
modulación FM cuando se emplea un tono como señal moduladora, siendo posible
visualizar la señal en el dominio del tiempo y en el de la frecuencia.
Empleando fórmulas trigonométricas, la ecuación (16a) se transforma en:
s (t ) = Ac cos(2πf c t ) cos[β ⋅ sen(2πf m t )] − Ac sen(2πf c t ) sen[β ⋅ sen(2πf m t )]
(16b)
Si consideramos que el índice de modulación es pequeño con respecto a un radián,
pueden realizarse varias aproximaciones en la ecuación (16b): cos[β ⋅ sen(2πf m t )] ≈ 1 y
sen[β ⋅ sen(2πf m t )] ≈ β ⋅ sen(2πf m t ) ⇒ FM de banda estrecha. Entonces,
s (t ) ≈ Ac cos(2πf c t ) − Ac sen(2πf c t ) β ⋅ sen(2πf m t )
(17)
Esta aproximación presenta dos problemas:
1. La envolvente contiene una modulación en amplitud residual, por lo que no es
constante.
2. La fase presenta distorsión armónica.
Es posible desarrollar la ecuación (17) con fórmulas trigonométricas:
s (t ) ≈ Ac cos(2πf c t ) +
Ac β
Aβ
cos[2π ( f c + f m )t ] − c cos[2π ( f c − f m )t ]
2
2
(18)
Para poder ilustrar la distorsión que aparece en FM de banda estrecha, suponga
los siguientes parámetros:
•
Frecuencia de muestreo f s = 200kHz .
•
Frecuencia de la portadora f c = 5000 Hz .
•
Frecuencia de la moduladora f m = 1000 Hz .
•
Amplitud de la portadora Ac = 7 V .
•
Amplitud de la moduladora Am = 3 V .
•
•
•
Índice de modulación β = 2 rad .
Número de muestras 10001.
Intervalo temporal [0, 0.05] s.
Deberá realizar un programa de Matlab® que haga lo siguiente:
5
Teoría de la Comunicación - Curso 2010-2011
•
•
•
•
•
•
•
•
•
Práctica 2
Mostrar la señal moduladora y la señal FM (obtenida con el comando de Matlab
2
modulate ) en el intervalo temporal [0.001, 0.005] s (emplee el comando axis
para ajustar la representación).
Mostrar el módulo de la transformada de Fourier de la señal moduladora y de la
señal FM anteriores (emplee el comando axis para ajustar su representación a
un intervalo que muestre claramente el espectro de ambas señales).
Demodular la señal FM con el comando de Matlab demod y representar la señal
obtenida en el intervalo [0.001, 0.005] s.
Representar el módulo de la transformada de Fourier de la señal demodulada.
Generar la señal modulada con la expresión (17) (aproximación de FM de banda
estrecha) y representarla en el intervalo [0.001, 0.005] s.
Mostrar el módulo de la transformada de Fourier de la señal modulada obtenida
con la aproximación de FM de banda estrecha.
Demodular con el comando de Matlab demod la señal modulada (FM de banda
estrecha) y representarla en el intervalo [0.001, 0.005] s. ¿Aparece distorsión?
Representar la transformada de Fourier de la señal demodulada en el punto
anterior para el intervalo de frecuencias [-10000, 10000] Hz. ¿Qué armónicos de
la señal moduladora están presentes?
Repita los pasos anteriores variando el índice de modulación.
Con el objetivo de complementar esta práctica sobre la modulación FM de banda
estrecha, en http://www.gib.tel.uva.es/tc/Tema3Applet2.html se puede simular vía web
dicho tipo de modulación paso a paso. El applet permite observar, tanto en tiempo como
en frecuencia, la señal moduladora, la señal resultante antes y después del modulador
producto y, finalmente, la señal modulada.
4. ESTUDIO DEL RUIDO
4.1. Ruido en modulación AM convencional
Como se ha visto en la parte teórica de la asignatura, la relación señal a ruido a
la salida de un receptor AM que emplea detector de envolvente es, aproximadamente,
( SNR) O , AM ≈
Ac2 k a2 P
2WN 0
(19)
Se asume que la señal transmitida está contaminada con ruido aditivo, blanco, gaussiano
y de media nula, con densidad espectral de potencia N0/2 y que W es el ancho de banda
de m(t). La ecuación (19) es válida si la potencia de ruido es pequeña con respecto a la
potencia media de la portadora a la entrada del detector de envolvente y si no hay
sobremodulación. Teniendo esto en cuenta, vamos a simular el efecto del ruido en la
modulación AM convencional. Supondremos que ( SNR ) O , AM = 20dB y que m(t) es la
señal moduladora del primer ejercicio de esta práctica (ecuación (5)).
2
El parámetro OPT de la función modulate para el caso que estamos considerando de modulación de un
tono viene dado por la expresión:
k=
2πβf m
f s Am
6
Teoría de la Comunicación - Curso 2010-2011
Práctica 2
•
Obtenga la relación señal a ruido en unidades naturales. Como ya ha calculado
anteriormente la potencia P, puede determinar 2WN0 sin más que despejar en
(19). En este caso3, coincide con σ N2 , la varianza del ruido.
•
Calcule la desviación típica del ruido a partir de σ N2 y construya un vector que
represente el ruido blanco, gaussiano, aditivo y de media nula que estamos
considerando.
Sume el ruido a la señal modulada, dando lugar a un vector que represente a
r (t ) = s (t ) + w(t ) .
Represente r(t).
Recupere la señal m(t) a partir de r(t) con un detector de envolvente. Utilice las
mismas líneas de código que en el caso anterior en el que no había ruido.
Repita los pasos anteriores con distintos valores de la relación señal a ruido con
el objetivo de ver la variación de la señal demodulada.
•
•
•
•
Se puede complementar los conocimientos adquiridos con esta práctica sobre
ruido en modulación AM convencional ejecutando el applet disponible en
http://www.gib.tel.uva.es/tc/Tema4Applet2.html. En dicho applet se puede simular vía
web dicho tipo de modulación paso a paso en presencia de ruido blanco gaussiano,
aditivo y de media nula. El applet permite observar, tanto en tiempo como en
frecuencia, la señal modulada, la señal modulada con ruido, la señal a la salidad del
filtro IF y, finalmente, la señal a la salida del demodulador.
BIBLIOGRAFÍA
[1] S. Haykin, Communication Systems, John Wiley & Sons, 4rd edition, 2001.
[2] The Mathworks, Manual de usuario de MATLAB.
3
Recuerde que estamos trabajando con ruido blanco gaussiano, aditivo y de media nula.
7
UNIVERSIDAD DE VALLADOLID
E.T.S. INGENIEROS DE TELECOMUNICACIÓN
TEORÍA DE LA COMUNICACIÓN
Práctica 3: Modulación analógica de pulsos.
Cuantificación. Transmisión digital banda
base y paso banda
Teoría de la Comunicación - Curso 2010-2011
Práctica 3
1. OBJETIVOS
Con esta última práctica de laboratorio de Teoría de la Comunicación se
pretende que el alumno sea capaz de simular los conocimientos teóricos adquiridos
sobre modulaciones analógicas y digitales de pulsos, así como algunos fundamentos
básicos de la transmisión digital banda base y paso banda. Para ello deberá realizar una
serie de programas de Matlab® que le permitirán:
1. Estudiar cómo puede simularse la modulación de pulsos en el tiempo.
2. Entender el concepto de cuantificación y aprender en qué situaciones hay que
aplicar la cuantificación uniforme o la no uniforme.
3. Estudiar el concepto de interferencia entre símbolos en la transmisión digital y
analizar las maneras de eliminarla.
4. Simular distintos esquemas de modulación digital paso banda.
Debido al limitado número de sesiones de laboratorio disponibles, resulta MUY
RECOMENDABLE plantearse la resolución de los ejercicios antes de la
correspondiente sesión práctica. De este modo es posible sacar el máximo partido al
tiempo pasado en el laboratorio.
2. MODULACIÓN ANALÓGICA DE PULSOS
En este primer apartado se pretende que el alumno sea capaz de simular la
modulación analógica de pulsos, según dos esquemas vistos en clase. Para ello se
recomienda consultar el toolbox ‘Signal Processing’, fijándose especialmente en las
funciones de la categoría ‘Specialized Operations’.
La modulación analógica de pulsos consiste en variar las características de un
pulso en función de la señal moduladora. El esquema de modulación analógica de
pulsos más sencillo es PAM o modulación de pulsos en amplitud. Consiste en hacer
variar la amplitud de los pulsos en función de la señal de información m(t). En
http://www.gib.tel.uva.es/tc/Tema5Applet2.html puede simular dicho esquema de
modulación. Sin embargo, en un sistema de modulación por pulsos es posible emplear
el ancho de banda extra consumido por los pulsos para mejorar el comportamiento
frente al ruido de PAM. Esto puede conseguirse representando los valores muestreados
de las señales con alguna propiedad del pulso distinta de su amplitud. Simularemos dos
esquemas de modulación diferentes:
•
•
Modulación por duración de pulsos (PDM).
Modulación por posición de pulsos (PPM).
2.1. Modulación por duración de pulsos (PDM)
En la modulación por duración de pulsos (PDM), en ocasiones denominada
modulación por anchura de pulsos (PWM o pulse-width modulation), las muestras de la
señal de información se emplean para variar la duración de los pulsos en la portadora.
La función de Matlab® que permite simular este tipo de modulación es modulate, ya
1
Teoría de la Comunicación - Curso 2010-2011
Práctica 3
estudiada en la práctica anterior. El método que implementa la modulación PDM es
‘pwm’.
Suponga que la frecuencia de muestreo es f s = 5000 Hz , la frecuencia portadora
f c = 200 Hz y que − 3 ≤ t ≤ 3 s . Con el objetivo de ilustrar el funcionamiento de la
modulación PDM, deberá realizar un programa de Matlab® que haga lo siguiente:
•
•
•
•
Genere una señal moduladora m1(t) formada por datos comprendidos entre 0 y 1
para el vector temporal mencionado anteriormente. La función rand puede
resultarle útil a la hora de definir m1(t).
Genere una señal modulada PDM a partir de la señal m1(t).
Represente los cinco primeros pulsos de la señal PDM. Tenga presente que el
vector que contenga las muestras de la señal PDM tiene una longitud igual a
length(x)*fs/fc.
Repita los pasos anteriores empleando la opción ‘centered’ en la modulación
PDM.
2.2. Modulación por posición de pulsos (PPM)
En la modulación por posición de pulsos (PPM) se varía la posición de un pulso
con respecto a su posición original en función de la señal de información m(t). Al igual
que sucede con la modulación PDM, la función de Matlab® que permite simular PPM es
modulate. En esta ocasión, el método que implementa la modulación PPM es ‘ppm’.
Suponga que la frecuencia de muestreo, la frecuencia portadora y el intervalo
temporal de trabajo son los mismos que en el apartado anterior. Para ilustrar el
funcionamiento de la modulación PPM, deberá realizar un programa de Matlab® que
haga lo siguiente:
•
•
•
•
•
Genere una señal moduladora m2(t) = 0.2 m1(t).
Genere una señal modulada PPM a partir de la señal m2(t). Los valores de la
señal moduladora determinan la posición de los pulsos en cada periodo.
Represente los cinco primeros pulsos de la señal PPM. Tenga presente que el
vector que contenga las muestras de la señal PPM tiene una longitud igual a
length(x)*fs/fc.
Repita los pasos anteriores variando opt con el objetivo de modificar la longitud
de los pulsos empleados en la modulación PPM.
Repita también el ejercicio empleando m1(t) como señal moduladora.
3. CUANTIFICACIÓN UNIFORME Y NO UNIFORME
En este apartado se pretende que el alumno sea capaz de generar una señal
cuantificada, según los distintos esquemas vistos en clase. Para ello se recomienda
consultar el toolbox ‘Communications Toolbox’, fijándose especialmente en las
funciones de la categoría ‘Source Coding’.
2
Teoría de la Comunicación - Curso 2010-2011
Práctica 3
Es posible distinguir dos tipos de cuantificación de señales: uniforme y no
uniforme. La primera funciona adecuadamente cuando la señal de entrada se reparte
uniformemente por todos los niveles de cuantificación. Sin embargo, hay aplicaciones
en las que es preferible emplear cuantificación no uniforme por las características de la
señal de entrada.
Considere las siguientes señales, definidas en el intervalo − 1 ≤ t ≤ 1 :
x1 (t ) = sen(2πt )
x 2 (t ) = t
(1)
(2)
¿Cuál sería el rango dinámico de un cuantificador uniforme adecuado para las
señales anteriores? Empleando la función de Matlab® quantiz diseñe un cuantificador
uniforme de 2, 4, 8, 16 y 32 niveles para x1 (t ) y x 2 (t ) . Considere f s = 1000 Hz .
Para utilizar quantiz necesitará definir dos vectores: partition y codebook. El
primero se usa para dividir el rango de la señal de entrada en N regiones. Tendrá, por lo
tanto, N–1 elementos. El segundo asigna un valor de cuantificación a cada región
definida con partition. La relación general entre ambos vectores es:
codebook (1) ≤ partition(1) ≤ codebook (2) ≤ K ≤ partition( N − 1) ≤ codebook ( N ) (3)
Si mmax es el valor máximo de la señal de entrada al cuantificador, la anchura de
cada intervalo de cuantificación será:
∆=
2mmax
N º de niveles
(4)
Puede definir los vectores partition y codebook en función de ∆ y mmax como:
partition = [-mmax+delta:delta:mmax-delta];
codebook = [-mmax+(delta/2):delta:mmax-(delta/2)];
Una vez diseñado el cuantificador uniforme:
•
•
•
•
•
Represente la señal x1 (t ) y su versión cuantificada en la misma figura.
Represente el error de cuantificación, definido como la diferencia entre el valor
real de la señal x1 (t ) y su valor cuantificado, y determine la distorsión.
Represente la señal x 2 (t ) y su versión cuantificada en la misma figura.
Represente el error de cuantificación, definido como la diferencia entre el valor
real de la señal x 2 (t ) y su valor cuantificado, y determine la distorsión.
¿Cómo varían los resultados al aumentar el número de niveles de cuantificación?
Hemos comentado que el rango dinámico del cuantificador ha de adecuarse a los
valores de entrada de las señales. Con el objetivo de ilustrar la importancia de este
aspecto, repita los apartados anteriores – sin modificar ninguna característica en el
cuantificador uniforme – con x3 (t ) = 2 ⋅ x1 (t ) y x 4 (t ) = 2 ⋅ x 2 (t ) . ¿Qué cambios hay en
el error de cuantificación y la distorsión?
3
Teoría de la Comunicación - Curso 2010-2011
Práctica 3
En http://www.gib.tel.uva.es/tc/Tema5Applet3.html se encuentra disponible un
applet que permite simular la cuantificación uniforme de varias señales (coseno, sinc y
pulso rectangular). Puede emplearlo para ver la importancia que tiene la adecuación del
rango dinámico del cuantificador a la señal que se pretende cuantificar y para
comprobar si los resultados previamente obtenidos con Matlab® son correctos.
El uso de un cuantificador uniforme no es adecuado cuando la señal original no
se reparte uniformemente por todos los niveles de cuantificación. En estos casos se
emplea cuantificación no uniforme. Para comprobar la utilidad de esta técnica considere
la señal x5 (t ) definida en el intervalo 0 ≤ t ≤ 4 :
x 5 (t ) = 0,78 ⋅ e −2⋅t sin (8πt )
(5)
Emplee el cuantificador uniforme diseñado antes y represente la señal x5 (t ) y su
versión cuantificada en la misma figura. ¿Se aprovechan adecuadamente los intervalos
de cuantificación? ¿Cuál es la distorsión? Represente también el error de cuantificación.
La función de Matlab® compand permite realizar la compresión y expansión de
la señal con las leyes A y µ. Para ver cómo cambia el número de intervalos de
cuantificación con ellas, realice la compresión de la señal x5 (t ) con los valores
A = 87,6 y µ = 255 . Tras ello utilice el cuantificador uniforme. Represente la señal
comprimida con cada ley y su versión cuantificada en la misma figura. ¿Qué diferencias
observa con respecto a emplear únicamente cuantificación uniforme?
4. INTERFERENCIA ENTRE SÍMBOLOS EN TRANSMISIÓN
DIGITAL EN BANDA BASE
A continuación se va a analizar el efecto de la interferencia entre símbolos (ISI)
en los sistemas de comunicación digital banda base. Para ello se recomienda consultar el
toolbox ‘Communications Toolbox’.
Cuando se transmiten datos digitales a través de un canal banda base hay que
considerar dos fuentes principales de error:
a) El ruido introducido por el canal.
b) La interferencia entre símbolos, que se debe a que un pulso (símbolo) puede
verse afectado por los adyacentes.
Si suponemos que ak son los símbolos (con valores +1 ó –1) transmitidos cada Tb
y g(t) el pulso que se toma como forma básica, la señal a la salida del transmisor es:
s (t ) = ∑ a k g (t − kTb )
(6)
k
Si h(t) representa el canal, w(t) el ruido y c(t) el filtro receptor, la señal recibida
vendrá dada por la siguiente expresión:
4
Teoría de la Comunicación - Curso 2010-2011
Práctica 3
y (t ) = µ ∑ ak p(t − kTb ) + n(t )
(7)
k
donde:
µp(t ) = g (t ) ∗ h(t ) ∗ c(t )
(8)
(9)
n(t ) = w(t ) ∗ c(t )
La señal y(t) es la que se muestrea para decidir el símbolo que se recibe en cada
instante iTb:
y (iTb ) = µ ∑ a k p (iTb − kTb ) + n(iTb ) = µa i p (0) + µ ∑ a k p[(i − k )Tb ] + n(iTb ) (10)
k ≠i
k
Para evitar la ISI (representada por el término µ ∑ a k p[(i − k )Tb ] ) ha de
k ≠i
cumplirse que:
1, m = 0
p (mTb ) =
0, m ≠ 0
(11)
Empleando filtros de coseno alzado se puede eliminar la ISI. En frecuencia:
1
P( f ) =
4W
1
,
2W
0 ≤ f ≤ f1
π ( f − W )
1 − sen
,
2
W
−
2
f
1
0,
f 1 ≤ f ≤ 2W − f 1
(12)
resto
En el dominio del tiempo:
p (t ) =
cos(2παWt )
sinc(2Wt)
1 − 16α 2W 2 t 2
(13)
El parámetro α se denomina factor de redondeo y está comprendido entre 0 y 1.
W está relacionado con el régimen o tasa de símbolos Rb según la expresión:
R
1
= b
2Tb
2
(14)
BT = W (1 + α )
(15)
W=
El ancho de banda es:
Realice las siguientes tareas con Matlab®:
5
Teoría de la Comunicación - Curso 2010-2011
•
•
Práctica 3
1
s y que f s = 2000 Hz .Represente en el dominio del
200
tiempo el filtro de coseno alzado (emplee la ecuación (13) para ello) con α = 0 ,
α = 0.3 , α = 0.6 y α = 1 . Ajuste el eje x para poder ver los datos en el intervalo
temporal [–0.02, 0.02].
Represente los filtros calculados anteriormente en el dominio de la frecuencia,
ajustando el eje x al intervalo comprendido entre − 1.5BT y 1.5BT .
Considere que Tb =
En el applet disponible en http://www.gib.tel.uva.es/tc/Tema6Applet1.html se
puede estudiar cómo cambia un filtro de coseno alzado, tanto en el dominio temporal
como en el de la frecuencia, cuando se varían W y α. De este modo se puede comprobar
si los resultados previamente obtenidos con Matlab® se ajustan a lo esperado.
Suponga que se transmiten cuatro símbolos ( a 0 = 1 , a1 = −1 , a 2 = 1 y a 3 = 1 )
con la tasa Rb especificada anteriormente, que se emplea un filtro de coseno alzado y
que, además, µ = 1 . Asumiendo nulo el ruido:
•
•
•
Represente la señal recibida. Tendrá que multiplicar cada símbolo por el filtro de
coseno alzado ( p (t ) en el caso del primer símbolo transmitido, p (t − Tb ) para el
segundo, y así sucesivamente) y realizar la suma de las distintas contribuciones.
Emplee el comando axis para ajustar los ejes de la manera que crea más
conveniente. Compruebe si existe interferencia entre símbolos representando en
una misma figura la señal recibida y la componente correspondiente a cada uno
de los símbolos.
t
). ¿Existe en esta ocasión
Repita el proceso anterior con un filtro p(t)=sinc(
2Tb
interferencia entre símbolos?
Repita los dos puntos anteriores variando los símbolos transmitidos.
5. MODULACIÓN DIGITAL PASO BANDA
En este último apartado simularemos conceptos relacionados con algunos
esquemas de modulación digital paso banda explicados en clase. Para ello se
recomienda consultar el toolbox ‘Communications Toolbox’, fijándose especialmente en
las funciones de la categoría ‘Digital Modulation/Demodulation’.
5.1. Modulación BPSK y QPSK sin ruido
Con este ejercicio se pretende ilustrar cómo es posible implementar las
modulaciones BPSK y QPSK con Matlab®. La función que permite simular estas
modulaciones es pskmod(x,m), donde x es la señal de información y m el número de
símbolos a emplear. Teniendo esto en cuenta, realice las siguientes tareas con Matlab®:
•
Genere una secuencia de 5000 símbolos que formarán la señal de datos. Para
ello es aconsejable utilizar la función randint, con el campo RANGE ajustado
al número de símbolos del alfabeto empleado en BPSK.
6
Teoría de la Comunicación - Curso 2010-2011
•
•
•
•
•
Práctica 3
Obtenga la señal BPSK con el comando pskmod.
Represente la constelación BPSK. Puede emplear para ello el comando
scatterplot.
Recupere la señal de datos original con el comando pskdemod.
Obtenga la probabilidad de error de bit con la función biterr.
Repita los pasos anteriores para la modulación QPSK.
El applet disponible en http://www.gib.tel.uva.es/tc/Tema7Applet2.html permite
simular la modulación PSK y puede resultar útil para visualizar en el tiempo cómo
cambia la fase de la portadora en función del símbolo transmitido.
5.2. Modulación BPSK y QPSK en presencia de ruido AWGN
Con este ejercicio se pretende mostrar el efecto que tiene el ruido en la
transmisión de señales BPSK y QPSK. Para añadir ruido blanco, gaussiano y aditivo a
la señal transmitida deberá emplear la función awgn. Teniendo esto en cuenta, realice las
siguientes tareas con Matlab®:
•
•
•
Genere una secuencia de 5000 símbolos que formarán la señal de datos. Para
ello es aconsejable utilizar la función randint, con las mismas consideraciones
acerca del campo RANGE que en el apartado anterior.
Obtenga la señal BPSK con el comando pskmod.
Transmita la señal a través de un canal que añade ruido blanco gaussiano.
Emplee para ello la siguiente línea de código
yruidosa = awgn(y,SNR);
•
•
•
•
•
Suponga que la SNR es de 15dB por muestra.
Represente la constelación BPSK.
Recupere la señal de datos original con el comando pskdemod.
Obtenga la probabilidad de error de bit con la función biterr.
Repita los pasos anteriores para distintos valores de SNR
Vuelva a realizar el ejercicio para la modulación QPSK.
BIBLIOGRAFÍA
[1] S. Haykin, Communication Systems, John Wiley & Sons, 4rd edition, 2001.
[2] The Mathworks, Manual de usuario de MATLAB.
7