Articulo - Diseño de Tren de Potencia de Vehiculo Eléctrico
Anuncio

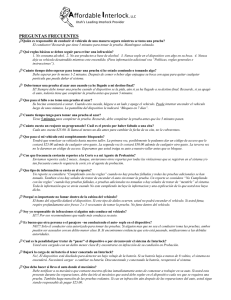
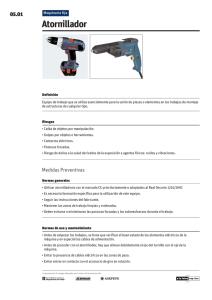
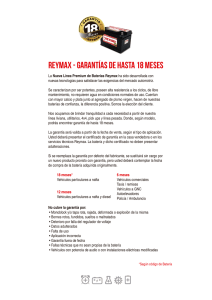
DISEÑO DE TREN DE POTENCIA DE UN VEHÍCULO ELÉCTRICO ____________________________________________________________ Ing. Juan Marcelo Torrez Baltazar Ing. Jimmy Gonzales Ustariz Resumen. Los altos niveles de contaminación atmosférica se han ido incrementado de manera considerable en los últimos años, siendo el sector de transporte uno de los mayores aportantes a este problema. Una de las alternativas más viables para disminuir el aporte de este sector a la contaminación, es la conversión de los vehículos a combustión interna a vehículos eléctricos, que además de no ser contaminantes, son más eficientes. El presente trabajo resume el diseño de un tren de potencia para la conversión de un vehículo a combustión interna a un vehículo eléctrico, desarrollado como parte del curso de especialidad “Vehículos Eléctricos, Almacenamiento e Infraestructura de Carga” de la Pontificia Universidad Católica de Chile. Palabras claves. Bancos de Batería, Caja Reductora Fija (FG), Conversión de Vehículo, Electromovilidad, Eficiencia Energética, Estación de Recarga, Inversor, Motor Síncrono de Imanes Permanente (PMSM), Tren de Potencia. 1. INTRODUCCIÓN El empleo de gasolina y diesel en el transporte terrestre ocasiona una elevada contaminación ambiental, al emitir gases generados por los motores de combustión interna (CI), como el monóxido de carbono (CO), dióxido de carbono (CO2), óxidos nítricos (NOx), dióxido de azufre (SO2) e hidrocarburos (HC). Una de alternativa viable para resolver este problema es el empleo de los vehículos eléctricos (VE), debido a que estos no producen contaminantes durante su funcionamiento [1]. Los vehículos eléctricos, son impulsados por un motor eléctrico que puede tomar energía de un banco de baterías, supercacacitores o una combinación de ambos. Es una tecnología que presenta ventajas en cuanto a torque, rangos de operación, emisiones de gases coontaminantes, entre otras, respecto a los vehículos de combustión interna [2]. El presente trabajo plantea el diseño de un tren de potencia para un vehículo 100% eléctrico, siguiendo los lineamientos definidos en el curso de especialización “Vehiculos Eléctricos, Almacenamiento e Infraestructura de Carga”. 2.1. Consideraciones Transformación para la En la siguiente tabla se detalla el peso estimado de los componentes del vehículo original que serán retirados, para determinar el peso del vehículo sin estos equipamientos. Tabla 1. Peso de componentes retirados. Para el tren de potencia se ha definido un tipo de un solo motor y un solo inversor, con un engranaje fijo (FG) y diferencial, como se muestra en la figura 1. 2. CONVERSIÓN DE UN VEHÍCULO CONVENSIONAL A ELÉCTRICO Para el diseño del tren de potencia se ha seleccionado un vehículo Toyota Corolla 2010. Fig. 1. Tren de potencia definido en el proyecto. 2.2. Determinación de las Características del Tren de Potencia Para determinar el par y la potencia necesarios para poder impulsar el vehículo, se requiere conocer el peso total aproximado del vehículo con pasajeros. A continuación, se muestra el detalle del peso estimado inicial del motor eléctrico (incluye el inversor) y el banco de baterías, que se consideró para la determinación de la potencia del motor eléctrico y la capacidad del banco de baterías. Posteriormente, una vez definido el modelo del motor, inversor y bancos de baterías, y conocidas sus especificaciones, se verificará nuevamente la potencia del motor eléctrico y la capacidad del banco de baterías. De la figura anterior podemos inferir que las fuerzas sobre el vehículo son: a) la fuerza de resistencia a la rodadura, b) la fuerza de resistencia (aerodinámica) al arrastre, c) la fuerza de resistencia a la pendiente, y d) la fuerza necesaria para vencer la inercia del vehículo eléctrico. Aplicando la segunda Ley de Newton al diagrama mostrado en la figura 2, tenemos que la fuerza de tracción del vehículo esta dado por: De la ecuación anterior, tenemos que: a) La fuerza de resistencia a la rodadura está determinada por: Tabla 2. Peso estimado inicial y peso final de componentes a adicionar. Donde: Crr : Coeficiente de rodadura (0.01) resistencia M : Peso Total del Vehículo (kg) g : Gravedad (m/s2) a la b) La fuerza de resistencia al arrastre se la calcula por la expresión: A fin de determinar el par y la potencia requerida por el motor eléctrico transferida a las ruedas a través del tren de transmisión, que permita acelerar el vehículo y mantenerla a la velocidad máxima con carga máxima, es necesario determinar previamente la fuerza de tracción requerida ( m). La figura 2 muestra las fuerzas actuantes sobre el vehículo. Donde: Cd : Coeficiente de resistencia al arrastre (0.28) ρ : Densidad del aire (1.2 kg/m3) S : Superficie frontal del vehículo (m2) V : Velocidad (m/s) c) La fuerza de resistencia a la pendiente está definida por: Fig. 2. Fuerzas que actúan sobre el vehículo. d) La fuerza requerida para vencer la inercia del VE toma en cuenta su masa por su aceleración. Para el cálculo de la potencia mecánica en las ruedas, debemos aplicar la siguiente expresión: La expresión final para el cálculo de la potencia está dada por la siguiente expresión: Una de las premisas para el diseño del tren de potencia es que el VE debe alcanzar una velocidad de 100 [km/h] entre 8 a 10 segundos. La aceleración para un cambio de velocidad de 100 km/h en 8 segundos es de 3.47 [m/s2] (a1=100*1000/3600/8) y para 10 segundos es de 2.78 [m/s2] (a2=100*1000/3600/10). Potencia mecánica para acelerar de 0 a 100 km/h, para 8 y 10 segundos 400 2.3. Motor Eléctrico Tabla 2. Datos generales para el cálculo de la potencia mecánica. Datos generales para el cálculo de la potencia mecánica Coef. de Arrastre : Cd 0.28 Coef. resistencia Rod. Crr 0.01 Aceleración Gravedad : g 9.80 [m/sg2] Eficiencia Transmisión: ⴄd 0.91 Area Frontal : S 1.97 [m2] Masa total (*) M 1562.20 [kg] Aceleración : a 2.78 [m/s2] Densidad del Aire: ρ 1.20 [kg/m3] (*) Incluye las masas preliminares del motor y la batería Los requerimientos de potencia del vehículo eléctrico responderán al criterio de velocidad máxima (170 km/h) y al criterio de aceleración. La aceleración es calculada por: Donde: ΔV : Variación de la velocidad en [m/s] Δt : Tiempo en el cual se alcanza la variación de velocidad [s] POTENCIA [KW] Para el dimensionamiento del motor eléctrico se tomará en cuenta la información detallada en la Tabla 2, con la salvedad de considerar valores iniciales aproximados para las masas tanto del motor como de la batería; asimismo, no se tomará en cuenta las pendientes por lo que la componente del peso será igual a cero. 350 300 250 200 150 100 50 0 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 3.47 [m/s2] 0 15 31 47 62 78 94 111 128 145 162 180 198 217 236 256 277 298 320 343 367 2.78 [m/s2] 0 12 25 38 50 63 76 90 103 117 132 147 162 178 194 211 229 247 266 286 306 VELOCIDAD [KM/H] Fig. 3. Potencia para alcanzar velocidad de 100 km/h, a una aceleración de 8 y 10 segundos. Aplicando la expresión de la potencia mecánica y la información detallada en la tabla 2, que toma en consideración un peso preliminar de 140 [kg] de la batería y 70 [kg] del motor eléctrico, se ha calculado la potencia en función de la velocidad para una aceleración de 2.78 [m/s2] y 3.47 [m/s2], respectivamente. De la figura 3 se puede observar que, para una velocidad de 100 [km/h] y una aceleración de 3.47 [m/s2], la potencia mecánica requerida es de 162 [kW]; en tanto que, para una aceleración de 2.78 [m/s2], es de 132 [kW]. Para el diseño del tren de potencia se adoptará una aceleración de 2.78 [m/s2] debido a la menor solicitud de potencia mecánica tanto para el motor como para la batería; en contraposición, adoptar la aceleración de 3.47 [m/s2], podría llevar a elegir un motor y una batería de mayor tamaño y por tanto mayor peso y mayor solicitud de potencia para el VE. Considerando el peso real de motor elegido (97 kg), actualizamos los requerimientos de potencia mecánica máxima y mínima del motor. Tal como se muestra en la tabla 3, la potencia mecánica máxima se incrementó de 132 [kW] a 134 [kW]; sin embargo, la potencia mínima para la velocidad máxima (170 [km/h]) se mantuvo casi invariable. Potencia mecánica para acelerar de 0 a 100 km/h en 10 segundos y potencia mecánica mínima 350 POTENCIA [KW] 300 250 200 150 100 Tabla 3. Potencia mecánica máxima y mínima considerando el peso asumido y real del motor eléctrico. 50 0 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 Vcte (km/h) 0 0 2.78 [m/s2] 0 12 25 38 50 63 76 90 103 117 132 147 162 178 194 211 229 247 266 286 306 1 1 2 3 4 5 7 9 11 14 17 21 25 30 36 42 49 57 65 VELOCIDAD [KM/H] 2 Fig. 4. Potencia para una aceleración de 2.78 [m/s ] y potencia mínima para mantener una velocidad constante. Una primera aproximación para definir la potencia máxima y mínima del motor es la que se muestra en la figura 4, vale decir que, para alcanzar una velocidad de 100 [km/h] a una aceleración de 2.78 [m/s2] se requiere de 132 [kW]; en tanto que, para mantener la máxima velocidad especificada de 170 [km/h], es necesario solo 42 [kW]. V (km/h) 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 Potencia mecánica máxima y mínima [kW] Vcte (km/h) 2.78 (m/s2) 70 [kg] 97 [kg] 70 [kg] 97 [kg] 0.0 0.0 0.0 0.0 0.4 0.4 12.5 12.7 0.9 0.9 25.0 25.4 1.5 1.5 37.6 38.3 2.2 2.2 50.4 51.2 3.0 3.1 63.3 64.4 4.1 4.1 76.4 77.7 5.4 5.5 89.8 91.3 7.0 7.1 103.5 105.2 9.0 9.1 117.5 119.4 11.4 11.4 131.9 134.1 14.1 14.2 146.7 149.1 17.4 17.5 162.0 164.6 21.1 21.2 177.8 180.7 25.5 25.6 194.2 197.2 30.4 30.5 211.2 214.4 35.9 36.0 228.8 232.2 42.2 42.3 247.1 250.7 Considerando el rendimiento de la transmisión de 0.91, el motor debería tener una potencia nominal de 46 [kW] (42/0.91) y una potencia máxima de 145 [kW] (132/0.91). Con la corrección del peso del motor y tomando en cuenta el rendimiento del tren de transmisión, los valores de potencia nominal y máxima del motor eléctrico son de 46 [kW] y 147 [kW] (134/0.91), respectivamente, inferiores a sus valores informados (75/150). Con los requerimientos de potencia nominal y máxima definidos, se busco en la página de Alibaba.com, motores con estas características, optándose por un kit de motor síncrono de imanes permanentes (PMSM) con inversor incluido, cuyos datos se detallan a continuación. [3] En la figura 6 se muestra la curva de eficiencia, potencia y velocidad, correspondiente a un PMSM; recurriremos a esta curva para definir los límites operativos tanto en velocidad como en potencia de manera de obtener la zona de mayor rendimiento del motor eléctrico. Fig. 5. Motor Síncrono de Imanes Permanentes, 75kW EV motor modelo TZ-280-X-S-GA03 Fig. 6. Curva de eficiencia, potencia y velocidad del motor [4] De acuerdo a la tabla 3, la máxima potencia por aceleración para una velocidad de 50 [km/h] que corresponde a la velocidad en zonas urbanas, es de 64 [kW], en tanto que la mínima potencia para mantener una velocidad constante será de 3 [kW]. Para la conversión de la velocidad lineal de las ruedas del VE en velocidad de rotación, consideramos el radio de la rueda (0.32 m) y la relación entre la velocidad lineal y de rotación (ω=V/r). En la tabla 4 se muestra un detalle de diferentes velocidades lineales y sus correspondientes velocidades de rotación, de ahí que para una velocidad de 50 [km/h] obtenemos 418 [rpm], y para la máxima velocidad exigida de 170 [km/h] de 1421 [rpm]. 2.5. Batería De la misma forma que para el motor y el inversor, se buscó en la página de Alibaba.com, modelos de baterías para aplicaciones a vehículo eléctricos, encontrándose la siguiente batería de litio del tipo modular [4]. Tabla 4. Velocidad lineal y de rotación. V (km/h) 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 ω (rpm) 0 83.6 167.2 250.8 334.4 418.1 501.7 585.3 668.9 752.5 836.1 919.7 1003.3 1087 1170.6 1254.2 1337.8 1421.4 Considerando la velocidad máxima del motor de 9000 rpm, la relación del FG (Fix Gear) será de 6.33:1 (9000/1421), lo que implicaría una velocidad inferior del motor de 6.33*418 = 2647 [rpm]. Con los límites de potencia y velocidad mostrados en la figura 6, se tiene delimitada la zona de operación del motor, de la cual se puede inferir una eficiencia promedio de 0.92. 2.4. Inversor El inversor está integrado al motor, con un requerimiento de voltaje de entrada de 350/750 [VDC], una capacidad máxima de 200 [kW], y cuyos parámetros son los que se muestran en la figura 7. Como el controlador está integrado al motor, no está informada su eficiencia, por lo que se adoptó la eficiencia de un equipo similar e igual al 99% [4]. Fig. 7. Inversor integrado al motor. Fig. 8. Batería de Ion de Litio para configuración en serie y paralelo. La batería seleccionada es una batería de Ion Litio, que permite la configuración en serie y paralelo, cada celda es de 3.6 [V] y 40 [Ah] con un peso aproximado de 1 [kg]. De acuerdo con los datos del inversor presentados en la figura 7, la tensión de entrada requerida está en el rango de 350/750 [VDC], para este rango lo ideal sería elegir el voltaje de 350 [VDC] para la batería dado que ello significaría una menor cantidad de unidades en serie. Para el dimensionamiento de la batería tomaremos como punto de partida una configuración serie de 100 celdas con lo que el módulo tendría un voltaje de 360 [V] (3.6*100), una capacidad de 14 [kWh] (360*40/1000) y un peso de 100 [kg]. Para determinar la capacidad final de la batería, es necesario realizar algunos cálculos previos que tomen en consideración, la potencia, velocidad, aceleración y una autonomía de 200 [km], utilizando la siguiente expresión: Donde: total : Eficiencia combinada de la transmisión (0.91), el motor (0.92) y el inversor (0.99) d : Autonomía (200 km) SOCMIN: Máxima descarga de la batería (0.1) P(V) :Potencia mecánica en las ruedas Es evidente que para determinar la energía que debe entregar la batería existe una relación directa con la potencia mecánica que a su vez depende del peso total del vehículo; hasta este punto, se ha definido el motor eléctrico y por tanto su peso; sin embargo, el peso de la batería responderá inicialmente a la configuración serie y es evidente que, para determinar el peso final de la batería, habrá que realizar iteraciones. Otro parámetro que se irá actualizando en cada iteración, aunque menos determinante que el peso de la batería, es la máxima potencia por aceleración para una velocidad de 50 [km/h], que definirá el rendimiento de motor eléctrico. Para el cálculo anterior se considera una velocidad constante e igual a 120 [km/h] correspondiente a zona semiurbana y para una autonomía de 200 [km]. Tabla 5. Configuraciones serie paralelo para diferentes voltajes de la batería Celdas Voltaje del Capacidad del Peso del Módulos Capacidad Capacidad Peso de la en serie Módulo Módulo[kWh] Módulo[kg] en paralelo Requerida[kWh] Batería[kWh] Batería[kg] 100 360.0 14.4 100.0 3.0 40 43.2 300.0 105 378.0 15.1 105.0 3.0 40 45.4 315.0 110 396.0 15.8 110.0 3.0 40 47.5 330.0 115 414.0 16.6 115.0 3.0 41 49.7 345.0 120 432.0 17.3 120.0 3.0 41 51.8 360.0 125 450.0 18.0 125.0 3.0 41 54.0 375.0 130 468.0 18.7 130.0 3.0 41 56.2 390.0 135 486.0 19.4 135.0 2.0 40 38.9 270.0 En la tabla 5, se presenta un cuadro resumen para diferentes valores de voltaje y configuración serie, paralelo, en todas ellas se puede observar que la capacidad requerida de la batería se mantiene en el entorno de los 40 [kWh], por ejemplo, para un voltaje de 360 [V], con solo el arreglo en serie se tendría una capacidad de 14.4 [kWh], por lo que para los 40 [kWh] es necesario adicionar 3 módulos en paralelo haciendo un total de 43.2 [kWh]. El menor peso de la batería sería para un voltaje de 486 [V], con una configuración de 135 celdas en serie y dos módulos en paralelo; sin embargo, este valor está muy por encima del voltaje de suministro de la infraestructura de carga que se encuentra en el orden de los 400 [V]. La configuración final de la batería por el menor peso y por supuesto menor costo será de 360 [V], una capacidad de 43.2 [kWh] y un peso de 300 [kg]. Finalmente, realizaremos un último ajuste con los valores definitivos de las masas del motor eléctrico y de la batería. Finalmente, la potencia mecánica máxima se incrementó de 132 [kW] a 147 [kW] y la potencia mínima de 42 [kW] a 43 [kW], que afectando por el rendimiento del tren de transmisión obtenemos 161 [kW] (147/0.91) y 47 [kW] (43/0.91), respectivamente. En cuanto a la potencia nominal del motor esta tiene un amplio margen (75 kW); sin embargo, su potencia máxima estaría ligeramente por debajo (150 kW). Es importante mencionar que los 161 [kW], corresponde a la potencia requerida para que el vehículo pueda alcanzar una velocidad de 0 a 100 [km/h] en 10 segundos considerando 5 ocupantes; sin embargo, la realidad es que la mayor parte de tiempo, el vehículo no se encontrará completamente ocupado, y el motor elegido podría cubrir perfectamente estos procesos de aceleración hasta con 4 pasajeros como se ve en la tabla 6; no obstante, el motor eléctrico si podría acelerar al vehículo con sus 5 ocupantes, pero a una aceleración menor. En cuanto al rendimiento del motor eléctrico al incrementarse la potencia de 63 [kW] a 71 [kW], hay un ligero desplazamiento de la región de operación tomando curvas de una eficiencia de hasta 90%; pero que no afecta en el promedio manteniéndose en el orden de 92%. Tabla 6. Potencia máxima requerida en función del número de ocupantes. Numero de ocupantes 1 2 3 4 5 Potencia Potencia máxima mecánica máxima requerida del motor 124 137 130 143 136 149 141 155 147 161 Potencia máxima del 150 150 150 150 150 La figura 9a a muestra el requerimiento de energía de la batería en función de la velocidad, variando desde 16 [kWh] para zonas urbanas (50 km/h) hasta 40 [kWh] para zonas suburbanas (120km/h). La figura 9b, muestra que la autonomía disminuye con el incremento de la velocidad, por ejemplo, para una velocidad de 60 [km/h], se obtiene una autonomía aproximada de 430 [km] y para 100 [km/h] de 280 [km]. Energía Requerida de la Batería (kWh) 45 40 KWH Tabla 7. Características del vehículo convertido. 35 30 3.2. Costos de la Conversión A continuación, se detalla el costo de la conversión del vehículo de combustión interna del proyecto a un vehículo eléctrico a batería (BEV), sin considerar costos de mano de obra, accesorios, ni impuestos o costos asociados al envío e importación de los componentes: 25 20 Tabla 8. Costos del tren de potencia diseñado. 15 10 5 0 0 10 20 30 40 50 60 70 80 90 100 110 120 KM/H a) Autonomia para la batería seleccionada [43.2 kWh] Componente Costo [$us] Motor + Inversor 4365.00 Banco de baterías 9000.00 BMS 150.00 Total 13515.00 800 BIBLIOGRAFIA 700 AUTONOMIA [KM] 600 [1] R. N. Gutiérrez R., “Conversión de Vehículo al Sistema de Tracción Eléctrica,” Instituto de Instituto de Investigaciones en Ingeniería Eléctrica – IIIE, Universidad Mayor de San Andrés. 500 400 300 200 100 0 10 20 30 40 50 60 70 80 90 100 110 120 VELOCIDAD [KM/H] b) Fig. 9. a) Energía requerida para una autonomía de 200 [km], b) autonomía para la batería seleccionada 3. VEHICULO CONVERTIDO 3.1. Características Implementado el tren de potencia diseñado, el vehículo convertido tendría las siguientes características: [2] G. C. Capellan, “Caracterización del Tren de Potencia de un Vehículo Eléctrico de Categoría L7 Tipo Smart,” Trabajo Final de Máster, Barcelona, 2017, p. 22 a 38. [3] Alibaba, “Alibaba.com,” 23/11/2021. [En línea]. https://www.alibaba.com/product-detail/High-qualitywholesale-electric-carcontroller_1600300836733.html?spm=a2700.details.0 .0.349465be9oNhkk. [Último acceso: 23 11 2021]. [4] E. J. Vázquez P., R. A. Valenzuela N. “Diseño de un Tren de Potencia de Vehículo Eléctrico para su Aplicación a un Taxi,” Departamento de Ingeniería Industrial y Manufactura, Universidad Autónoma de Ciudad Juárez. AUTORES Juan Marcelo Torrez Baltazar Ingeniero Electricista de la UMSA, miembro IEEE y usuario de los programas DIgSILENT, PSS@CAPE, ATP-EMTP, MATLAB, SDDP y NCP. Diplomado en Ingeniería y Tecnología de Sistemas de Potencia de la UPB, y Herramientas para el Análisis de Sistemas Eléctricos en la Universidad INCCA de Colombia. Actualmente se encuentra desarrollado su proyecto de grado para optar al título de Magister en Sistemas Eléctricos de Potencia de la UMSS. Realizó cursos internacionales de especialización en modelación de redes eléctricas, estudios eléctricos, protecciones de sistemas de potencia, confiabilidad de sistemas de generación-transmisión y electromovilidad. Docente de cursos de especialización en protecciones y sistemas eléctricos de potencia con la empresa SEDESEM y programas de diplomado en la Universidad Privada Boliviana y en la Escuela Boliviana de Posgrado. Tutor y tribunal de tesis en las universidades UMSA y UMSS. Autor de varios artículos técnicos en el área de protecciones y simulación de sistemas eléctricos de potencia. Ocupó el cargo de Ingeniero de Protecciones y Jefe de la División de Análisis Operativo en la Gerencia de Operaciones del Comité Nacional de Despacho de Carga Actualmente ocupa el cargo de Ingeniero de Estudios Energéticos en la Gerencia de Planificación, encargado de realizar tareas de planificación, simulación y evaluación económica de proyectos a incorporarse al Sistema Interconectado Nacional. Jimmy Gonzales Ustariz Ingeniero Electricista egresado de la UMSS, trabajo en el CNDC desde 1997, desarrollando sus actividades en las Gerencias de Operaciones y Administración; actualmente vinculado a la Gerencia de Planificación como en el cargo de Ingeniero de Estudios Energéticos encargado de realizar tareas de planificación, simulación y evaluación. económica de proyectos a ser incorporados al Sistema Interconectado Nacional