SIAM J. NUMER. ANAL.
Vol. 55, No. 4, pp. 1915–1936
c 2017 Society for Industrial and Applied Mathematics
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
A STUDY OF TWO MODES OF LOCKING IN POROELASTICITY∗
SON-YOUNG YI†
Abstract. In this paper, we study two modes of locking phenomena in poroelasticity: Possion
locking and pressure oscillations. We first study the regularity of the solution of the Biot model
to gain some insight into the cause of Poisson locking and show that the displacement gets into a
divergence-free state as the Lamé constant λ → ∞. We also examine the cause of pressure oscillations
from an algebraic point of view when a three-field mixed finite element method is used. Based on
the results of our study on the causes of the two modes of locking, we propose a new family of mixed
finite elements that are free of both pressure oscillations and Poisson locking. Some numerical results
are presented to validate our theoretical studies.
Key words. poroelasticity, Biot model, mixed finite element methods, Poisson locking, pressure
oscillations
AMS subject classifications. 65M12, 74F10, 76S99
DOI. 10.1137/16M1056109
1. Introduction. Biot’s consolidation model describes the interaction between
the fluid flow and deformation in an elastic porous material [3]. In this model, the motion of fluid in a porous medium is described by Darcy’s law, whereas the deformation
of the porous medium is governed by linear elasticity. Modeling the mechanical behavior of fluid-saturated porous media is of great importance in a wide range of science
and engineering fields including reservoir engineering, soil mechanics, environmental
engineering, and, more recently, biomechanical engineering.
There is an extensive body of literature on finite element methods for the Biot
model. The most common approaches make use of a continuous Galerkin method
for both the displacement and pressure [9] or combine a mixed finite element method
for the flow variables and a continuous Galerkin method for displacement [15, 16],
possibly with some stabilization techniques [21].
It is well known that the standard Galerkin finite element method produces unstable and oscillatory numerical behavior of the pore pressure for a certain range of
material parameters [20, 19, 4] and the stabilization of pore pressure oscillations has
been a subject of extensive research [13, 21, 10, 17, 8, 22, 23]. A well-accepted theory
on the cause of this pressure instability was proposed by Phillips and Wheeler [18].
They heuristically examined the cause of locking and concluded that locking occurs
due to the fact that at an early time the solid skeleton behaves as an incompressible
medium, i.e., the deformation is in a divergence-free state, if the constrained specific
storage term is null (c0 = 0), the permeability of the porous medium is very low, and
a small time step is used.
In this paper, we reexamine the cause of pressure oscillations in the three-field
mixed finite element method from an algebraic point of view. We found that, unlike Phillips and Wheeler’s conclusion in [18], pressure oscillations occur due to the
∗ Received by the editors January 12, 2016; accepted for publication (in revised form) March 15,
2017; published electronically August 8, 2017.
http://www.siam.org/journals/sinum/55-4/M105610.html
Funding: The work of the author was supported by the National Science Foundation under
grant DMS-1217123.
† Department of Mathematical Sciences, University of Texas at El Paso, El Paso, TX 79968
(syi@utep.edu, http://www.math.utep.edu/Faculty/yi).
1915
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
1916
SON-YOUNG YI
incompatibility of the spaces for the displacement and pore pressure, assuming that
the flux and pressure spaces satisfy the inf-sup condition.
Another interesting finding of the work is that standard finite element methods can suffer from Poisson locking in poroelasticity. Unlike pressure oscillations,
Poisson locking has not received much attention so far in poroelasticity. In linear
elasticity, however, it is well known that a continuous linear or bilinear finite element on a triangular or rectangular mesh, respectively, yields a poor approximation
to the displacement as λ → ∞ [5]. In this case, either a finite element computation produces significantly smaller displacement than it should or numerical solutions
experience oscillations in the stress. This phenomenon is known as Poisson locking
or volume locking. In linear elasticity, Poisson locking can be explained by the fact
that k∇ · uk1 → 0 as λ → ∞ and a continuous linear or bilinear space is overly constrained by this divergence-free condition for a large λ. In this paper, we prove that
the displacement in linear poroelasticity problem gets into a divergence-free state as
λ → ∞ like in linear elasticity. Therefore, the same Poisson locking is anticipated for
poroelaticity equations if continuous linear elements on a triangular mesh or bilinear
elements on a rectangular mesh are used. To the best of our knowledge, this is the
first attempt to study Poisson locking in poroelasticity.
Based on the results of our study on the causes of the two modes of locking, we
propose a family of new mixed finite elements that are free of both pressure oscillations
and Poisson locking. We employ the Raviart–Thomas space for the flow variables
and the Bernardi and Raugel element [2] for the displacement that was originally
developed for the Stokes problem. We present the lowest-order element in the family
in the two-dimensional case first, and then extend it to higher-order elements in two
dimensions and finally in three dimensions. We prove the existence and uniqueness
theorem of the approximate solution and also derive an optimal convergence rate for
each variable: the displacement in the L∞ (0, T ; H 1 (Ω)) norm and the flow variables
in the L2 ([0, T ]; L2 (Ω)) norm. The convergence constants in the error analysis are
independent of the Lamé constant λ.
The rest of this paper is organized as follows. In section 2, we describe Biot’s
consolidation model and derive a three-field mixed variational formulation involving
the displacement, flux, and pressure as its primary unknowns. In section 3, we prove
the regularity of the solution of the Biot model and discuss the cause of Possion
locking in poroelasticity. Then, in section 5, a new family of mixed finite elements
is introduced, and the existence and uniqueness of the solution and a priori error
estimates are proved. We extend the two-dimensional elements to three dimensions
in section 6. Last, section 7 presents some of our numerical results.
2. Biot’s consolidation model. Let Ω be a bounded, connected, Lipschitz
domain in Rd , d = 2, 3. Then, the governing equations are
(1a)
(1b)
−(λ + µ)∇(∇ · u) − µ∇2 u + α∇p = f ,
∂
(c0 p + α∇ · u) − ∇ · (K∇p) = h,
∂t
where f is the body force and h is the volumetric source/sink term. The primary
unknowns are the fluid pressure p and the displacement of the solid phase u. The
e = σ − αpI, where α is the Biot–Willis constant
total stress tensor is given by σ
and σ is the standard stress tensor from linear elasticity, satisfying the constitutive
equation σij (u) = λδij εkk (u) + 2µεij (u). Here, ε(u) = 21 [∇u + (∇u)T ] is the strain
tensor. We consider the Lamé constants (µ, λ) in the range [µ0 , µ1 ] × [λ0 , ∞), where
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
TWO MODES OF LOCKING IN POROELASTICITY
1917
0 < µ0 < µ1 < ∞ and λ0 > 0. For linear plane strain, the Lamé constants are
given by
Eν
E
λ=
, µ=
,
(1 + ν)(1 − 2ν)
2(1 + ν)
where E is Young’s modulus and ν is Poisson’s ratio. The momentum balance for
the fluid is interpreted as the Darcy law for the volumetric fluid flux: q = −K∇p.
We ignore the gravity effect here for a simple presentation of the numerical method.
However, it is straightforward to include the gravity term in the numerical formulation.
The permeability tensor, K, is a symmetric and uniformly positive definite tensor
which satisfies the following assumption: there exist positive constants kmin and kmax
such that for any x ∈ Ω
kmin ξ T ξ ≤ ξ T K(x)ξ ≤ kmax ξ T ξ
(2)
∀ξ ∈ Rd .
The fluid content, η, can be written as η = c0 p + α∇ · u, where c0 is the constrained
specific storage coefficient. The mass conservation states that ηt = −∇ · q + h.
To complete the system (1), we have to prescribe suitable boundary and initial
conditions. To this end, we introduce a pair of partitions of the boundary of Ω,
{Γp , Γf } and {Γd , Γt }, such that ∂Ω = Γp ∪ Γf and ∂Ω = Γd ∪ Γt . We assume that
|Γp | > 0 and |Γd | > 0.
On the boundary ∂Ω, we prescribe homogeneous mixed boundary conditions for
simplicity:
(3)
p = 0 on Γp ,
q · n = 0 on Γf ,
u = 0 on Γd ,
e · n = 0 on Γt ,
σ
where n is the outward unit normal vector. Note that the proposed numerical method
can readily be extended to nonhomogeneous boundary conditions. We also have the
following initial conditions:
p(0) = p0 and u(0) = u0 in Ω
(4)
such that
p0 = 0 on Γp
and
u0 = 0 on Γd .
2.1. Mixed variational formulation. In this section, we present a mixed
variational formulation whose primary variables include the volumetric fluid flux,
q = −K∇p, as well as the pressure and the displacement. Using (u, q, p), the governing equations (1a) and (1b) can be rewritten as
(5a)
−(λ + µ)∇(∇ · u) − µ∇2 u + α∇p = f ,
(5b)
K−1 q + ∇p = 0,
(5c)
∂
(c0 p + α∇ · u) + ∇ · q = h.
∂t
Before we proceed, let us introduce some function spaces and their norms that
will be used throughout. As usual, we denote by | · |m,T and k · km,T , respectively, the
seminorm and norm in the Sobolov space (H m (T ))n , where n is an integer. When
m = 0, (H m (T ))n coincides with (L2 (T ))n . In this case, the inner product and the
norm will be denoted by (·, ·)T and k · kT , respectively. The subscript T will be
dropped if T = Ω. In particular, we define
1
(H0,Γ
(Ω))d = {v ∈ (H1 (Ω))d : v|Γd = 0}
d
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1918
SON-YOUNG YI
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
relevant to the displacement. For the flux variable, we define
H(div; Ω) = {z ∈ (L2 (Ω))d : ∇ · z ∈ L2 (Ω)}
1
with its natural norm kzkH(div) = (kzk20 + k∇ · zk20 ) 2 and a subspace
H0,Γf (div; Ω) = {z ∈ H(div; Ω) : z · n|Γf = 0}.
For simplicity of notation, we further let
1
U = (H0,Γ
(Ω))d ,
d
V = H0,Γf (div; Ω),
W = L2 (Ω).
In order to derive a mixed variational formulation, we multiply (5a), (5b), and
(5c) by v ∈ U, z ∈ V, and w ∈ W, respectively, and integrate each equation over the
domain Ω using integration by parts when necessary. Then, the mixed variational
formulation of (5) is to find (u, q, p) ∈ U × V × W such that
a(u, v) − α(p, ∇ · v) = (f , v),
(6a)
(K−1 q, z) − (p, ∇ · z) = 0,
(6b)
c0 (pt , w) + α(∇ · ut , w) + (∇ · q, w) = (h, w)
(6c)
for every t ∈ (0, T ] and (v, z, w) ∈ U × V × W. Here, the bilinear form a(u, v) is
defined by a(u, v) = 2µ(ε(u), ε(v)) + λ(∇ · u, ∇ · v). It is trivial to see that a(·, ·) is
symmetric and continuous. Given that |Γd | > 0, the second Korn’s inequality holds
on U [14], that is, there exists C = C(Ω, Γd ) > 0 such that
kvk1 ≤ Ckε(v)k0
(7)
∀v ∈ U.
Therefore, a(·, ·) is coercive on U.
3. Poisson locking in poroelasticity. The main goal of this section is to
explore the cause of Poisson locking in poroelasticity by studying the regularity of
the solution of the Biot model. We will prove that the displacement gets into a
divergence-free state as the Lamé constant λ → ∞, like in linear elasticity.
3.1. Regularity of the strong solution. Let us assume that our data f and
h and the initial condition p0 satisfy the following regularity conditions:
f ∈ C 1 (0, T ; (H −1 (Ω))d ),
(8)
h ∈ C 1 (0, T ; L2 (Ω)),
p0 ∈ H 1 (Ω).
Lemma 3.1. Let (u, p) be the solution of the Biot model (1). Then, for T > 0,
there exists a constant C, independent of λ and h, such that
Z
T
kut (s)k21 ds + sup k∇p(t)k20
0≤t≤T
0
(9)
≤C
kp0 k21
+ sup
0≤t≤T
kh(t)k20
Z
+
!
T
(kft (s)k2−1
+
kht (s)k20 ) ds
.
0
Proof. We can rewrite the elasticity equation (1a) as
−∇ · (2µε(u) + λtr (ε(u))I) + α∇p = f
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
TWO MODES OF LOCKING IN POROELASTICITY
1919
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
and differentiate both sides with respect to time to get
− ∇ · (2µε(ut ) + λtr (ε(ut ))I) + α∇pt = ft .
(10)
1
Now, multiplying (10) by v ∈ (H0,Γ
(Ω))d and using integration by parts, we
d
obtain
2µ(ε(ut ), ε(v)) + λ(∇ · ut , ∇ · v) − α(pt , ∇ · v) = (ft , v).
(11)
1
Also, let w ∈ H0,Γ
(Ω) and multiply the flow equation (1b) by w and use integration
p
by parts to see
c0 (pt , w) + α(∇ · ut , w) + (K∇p, ∇w) = (h, w).
(12)
Taking v = ut in (11) and w = pt in (12) and adding them together yields
2µkε(ut )k20 + λk∇ · ut k20 +
1
c0 d
1 d
kpk20 +
kK 2 ∇pk20 = (ft , ut ) + (h, pt ).
2 dt
2 dt
Integrating the above equation from 0 to t ≤ T and applying integration by parts in
time to the second integral on the right-hand side, we obtain, after some rearrangements,
Z t
Z t
1
c0
1
2µ
kε(ut (s))k20 ds + λ
k∇ · ut (s)k20 ds + kp(t)k20 + kK 2 ∇p(t)k20
2
2
0
o
Z t
1
1
c0
=
((ft (s), ut (s)) + (h(s), pt (s)) ds + kp0 k20 + kK 2 ∇p0 k20
2
2
0
Z t
1
1
=
((ft (s), ut (s)) − (ht (s), p(s))) ds + (h(t), p(t)) − (h(0), p0 ) + kK 2 ∇p0 k20 .
2
0
First, note that the left-hand side is bounded below as follows:
Z t
kmin
k∇p(t)k20 ,
LHS ≥ 2µCK
kut (s)k21 ds +
2
0
where CK = CK (Ω, Γd ) is the constant from Korn’s inequality. To bound the righthand side use the Cauchy–Schwarz inequality, generalized Young’s inequality, and
Poincaré inequality, kpk0 ≤ CΩ k∇pk0 , to obtain the following:
Z t
RHS ≤ 1
kut (s)k21 ds + 2 k∇p(t)k20
0
!
Z t
Z T
2
0 2
2
2
2
+C
k∇p(s)k0 ds + kp k1 + sup kh(t)k0 +
kft (s)k−1 +kht (s)k0 ds ,
0
0≤t≤T
0
where 1 and 2 are positive constants and C = C(Ω, K). Taking sufficiently small 1
and 2 and manipulating the inequality, we finally have
Z t
kut (s)k21 ds + k∇p(t)k20
0
!
Z t
Z T
2
0 2
2
2
2
≤C
k∇p(s)k0 ds + kp k1 + sup kh(t)k0 +
kft (s)k−1 + kht (s)k0 ds ,
0
0≤t≤T
0
where C = C(Ω, Γd , K, µ). Since this holds true for any 0 < t ≤ T , (9) follows from
Gronwall’s lemma.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1920
SON-YOUNG YI
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
Thanks to the Poincaré inequality, the following result immediately follows from
Lemma 3.1.
Corollary 3.2. Let T > 0. Then,
Z
T
kut (s)k21 ds + sup kp(t)k21
0≤t≤T
0
kp0 k21
≤C
(13)
+ sup
0≤t≤T
kh(t)k20
Z
+
!
T
(kft (s)k2−1
+
kht (s)k20 ) ds
,
0
Theorem 3.3. Let (u, p) be the solution of the Biot model (1). Then, for T > 0,
sup ku(t)k2 + λ sup k∇ · u(t)k1 ≤ C kp0 k1 + sup kf (t)k0 + sup kh(t)k0
0≤t≤T
0≤t≤T
Z
+
(14)
0≤t≤T
! 21
T
kft (s)k2−1
0
ds
Z
+
0≤t≤T
!1
2
T
kht (s)k20 ds
,
0
where C = C(Ω, Γd , K, µ).
Proof. Note that u is a solution of the elasticity problem
−(λ + µ)∇(∇ · u) − µ∇2 u = f − α∇p
and the regularity of this solution is well known [5]:
kuk2 + λk∇ · uk1 ≤ Ckf − α∇pk0 ≤ C(kf k0 + k∇pk0 ),
(15)
where C = C(Ω, Γd ). Therefore, (15) combined with (9) yields (14).
Remark 3.4. Assuming smooth time derivatives of the solution and the data functions, we can prove a similar regularity result for ut and utt .
4. Cause of pressure oscillations when c0 = 0. We now turn our attention
to a mixed finite element method for discretization of (6). Let Th be a family of
triangulations of Ω into triangular or quadrilateral elements. Then, we introduce
some notation for our finite dimensional approximation spaces as follows: let Vh ×
Wh ⊂ V × W denote a standard mixed finite element space defined on Th and let
Uh ⊂ U denote a conforming finite element space of U. Also, ∆t = T /N , where N
is a positive integer, and let tn = n∆t. After choosing appropriate initial discrete
solutions u0h and p0h , our fully discrete mixed finite element approximation for each
time t = tn , 1 ≤ n ≤ N , is to find (unh , qnh , pnh ) ∈ Uh × Vh × Wh such that
(16a)
a(unh , v) − α(pnh , ∇ · v) = (f n , v),
(16b)
(K−1 qnh , z) − (pnh , ∇ · z) = 0,
n
ph − pn−1
∇ · (unh − un−1
)
h
h
c0
,w + α
, w + (∇ · qnh , w) = (hn , w)
∆t
∆t
(16c)
for every (v, z, w) ∈ Uh × Vh × Wh .
It is well known that when a continuous linear or bilinear element for the displacement, combined with a stable mixed finite element for the flow variables, yields
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
TWO MODES OF LOCKING IN POROELASTICITY
1921
spurious pressure oscillations when c0 = 0 and K → 0[17]. In order to investigate the
cause of the spurious pressure oscillations in such cases, we will approach the problem
from an algebraic point of view.
We now write the solution, (unh , qnh , pnh ), of the fully discrete problem (16) for each
time t = tn in its respective finite element basis functions:
unh (x) =
Nu
X
unj φu,j (x),
j
Nq
qnh (x) =
X
qnj φq,j (x),
j
Np
pnh (x) =
X
pnj φp,j (x).
j
Then, define
(Cuu )ij = a(φu,j , φu,i ),
−1
(Cqq )ij = (K
1 ≤ i, j ≤ Nu ,
φq,j , φq,i ),
1 ≤ i, j ≤ Nq ,
(Cup )ij = (∇ · φu,j , φp,i ),
1 ≤ i, ≤ Np , 1 ≤ j ≤ Nu ,
(Cqp )ij = (∇ · φq,j , φp,i ),
1 ≤ i, ≤ Np , 1 ≤ j ≤ Nq .
Then, the system (16) when c0 = 0 can be written in matrix form AX n = Ln ,
where
n
n
T
fu
Cuu
0
−Cup
uh
T
∆tCqq −∆tCqp
A= 0
, X n = qnh , and Ln = 0 .
pnh
Cup ∆tCqp
0
h̃np
with (hnp )i = (hn , φp,i ) and fun = (f n , φu,i ).
Here, h̃np = ∆thnp + Cup un−1
h
Note that Cuu and Cqq are nonsingular for nonzero λ, µ, and K. Therefore, A
admits the following block factorization:
T
Cuu
O
−Cup
I
O
O
T
I
O O
∆tCqq −∆tCqp
,
A= O
−1
−1
I
Cqp Cqq
Cup Cuu
O
O
S
−1 T
−1 T
where S = Cup Cuu
Cup + ∆tCqp Cqq
Cqp . This implies that the invertibility of A is
−1 T
equivalent to that of S. For a positive permeability K, Cqp Cqq
Cqp is symmetric
positive definite. Hence, S is always nonsingular. However, we can easily see that
−1
−1 T
−1 T
Cqq
≈ O as K ≈ O. That is, S ≈ Cup Cuu
Cup when K ≈ O. Note that Cup Cuu
Cup
is positive semidefinite. In order to ensure the positive-definiteness of this matrix,
T
T
it is necessary for Cup to satisfy ker(Cup
) = {0}. If ker(Cup
) 6= {0}, there exists a
∗
function ph ∈ Wh , which is known as a spurious pressure mode, such that
(p∗h , ∇ · v) = 0 ∀v ∈ Uh .
Any such function satisfies
(ph + cp∗h , ∇ · v) = (ph , ∇ · v) ∀v ∈ Uh , ∀c ∈ R.
Therefore, the fully discrete problem (16) with c0 = 0 defines a discrete pressure only
up to those functions that are linear combinations of spurious pressure modes. This
causes numerical instabilities in the pressure approximation.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
1922
SON-YOUNG YI
Remark 4.1. It is clear from the above discussion that the continuous linear or
bilinear space, combined with the Raviart–Thomas space, produces pressure oscillaT
tions because Uh and Wh are not compatible [7]. That is, ker(Cup
) 6= {0}. Also, the
constant C in the error estimates depends on λ [16]. Therefore, Poisson locking is
also anticipated for a large value of λ when using that method.
Remark 4.2. In [22], the author coupled a nonconforming finite element for the
displacement with a mixed finite element for the flow variables and showed that spurious pressure oscillations were eliminated. This result is consistent with the current
findings in this paper in the sense that the finite element spaces for the displacement
and pressure are compatible. On the other hand, Phillips and Wheeler [17] proposed
to couple a discontinuous Galerkin (DG) method for the displacement with a mixed
finite element for the flow variables as a potential remedy for nonphysical pressure
oscillations. In their study of the existence and uniqueness theory, as well as the
convergence analysis, they allowed the use of any orders of the DG space and the
mixed finite element spaces. However, in order to have the compatibility between the
displacement and pressure spaces, these orders cannot be chosen independently. From
this perspective, the success of their method in removing spurious pressure oscillations
depends on the choice of the orders of the finite element spaces.
5. Locking-free finite element methods in two dimension. Our primary
goal in this section is to define a mixed finite element method that does not suffer from
either Poisson locking when λ → ∞ or pressure oscillations when c0 = 0 and K ≈ 0
and to derive its a priori error estimates. In this paper, we will consider simplicial
elements only.
5.1. The lowest-order element. First, let Vh × Wh ⊂ V × W be the lowestorder Raviart–Thomas space [6] which satisfies the boundary conditions (3), i.e.,
Vh = {z ∈ H0,Γf (div; Ω) | z|K = (P0 (K))2 + xP0 (K) ∀K ∈ Th },
Wh = {w ∈ L2 (Ω) | w|K ∈ P0 (K) ∀K ∈ Th }.
Here, Pk (E) denotes the space of all polynomials of total degree ≤ k on a set E. These
spaces are endowed with the well-known interpolation operators Πh : H(div; Ω) → Vh
and Ph : L2 (Ω) → Wh which satisfy the following properties:
(17a)
(∇ · (z − Πh z), w) = 0 ∀w ∈ Wh ,
(17b)
kz − Πh zk0 ≤ Chm kzkm ,
(17c)
(s − Ph s, w) = 0 ∀w ∈ Wh ,
(17d)
ks − Ph sk0 ≤ Chm kskm ,
(17e)
∇ · Πh z = Ph ∇ · z.
0 ≤ m ≤ 1,
0 ≤ m ≤ 1,
The approximation space for the displacement uses the Bernardi–Raugel element
[2] that was originally developed for the Stokes problem. Let K be an arbitrary
triangle of Th with vertices a1 , a2 , a3 . We denote by ei , 1 ≤ i ≤ 3, the side opposite
ai and by ni the unit outward normal vector to ei . Let
θ1 = n1 λ2 λ3 ,
θ2 = n2 λ3 λ1 ,
θ3 = n3 λ1 λ2 ,
where λi , 1 ≤ i ≤ 3, are the barycentric coordinates with respect to the vertices of
K ∈ Th . Then, we define
P1 (K) = (P1 )2 ⊕ span{θ1 , θ2 , θ3 }.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
TWO MODES OF LOCKING IN POROELASTICITY
1923
Clearly, dim(P1 (K)) = 9. The degrees of freedom we take for P1 (K) are the values
of two components of v ∈ P1 (K) at each vertex of K and the values of the lowest
moment of the normal component of v on each edge of K:
(
v(ai ),
1 ≤ i ≤ 3,
R
v
·
n
ds,
1 ≤ i ≤ 3.
ei
Finally, the approximation space Uh is defined as follows:
1
Uh = {v ∈ (H0,Γ
(Ω))2 | v|K ∈ P1 (K) ∀K ∈ Th }.
d
(18)
Then, we can define an interpolation operator πh : (H1 (Ω))2 → Uh such that
(19a)
(∇ · (v − πh v), w) = 0 ∀w ∈ Wh ,
(19b)
||v − πh v||m ≤ Chk−m ||v||k ,
(19c)
0 ≤ m ≤ 1, 1 ≤ k ≤ 2,
Ph ∇ · πh v = Ph ∇ · v.
Our fully discrete mixed finite element approximation for each time t = tn , 1 ≤
n ≤ N , is to find (unh , qnh , pnh ) ∈ Uh × Vh × Wh such that
(20a)
ah (unh , v) − α(pnh , ∇ · v) = (f n , v),
(20b)
(K−1 qnh , z) − (pnh , ∇ · z) = 0,
n
∇ · (unh − un−1
)
ph − pn−1
h
h
,w + α
, w + (∇ · qnh , w) = (hn , w)
c0
∆t
∆t
(20c)
for every (v, z, w) ∈ Uh × Vh × Wh . Here, the bilinear form ah (u, v) is defined by
ah (u, v) = 2µ(ε(u), ε(v)) + λ(Ph ∇ · u, Ph ∇ · v).
Remark 5.1. In this discretized problem, we employ the method of reduced integration [11] in the bilinear form ah to obtain the uniform convergence for the displacement with respect to λ. From a practical perspective, this will affect only the
edge bubble basis functions, θi , i = 1, 2, 3, as the divergence of the other linear basis
functions is already piecewise constant.
Now, we need to choose appropriate discrete initial solutions, u0h ∈ Uh and
p0h ∈ Wh , to solve the discrete problem (20). For that, we choose
u0h = πh u0 ,
p0h = Ph p0 .
5.1.1. Existence and uniqueness. For the existence and uniqueness of the
solution of (20), we investigate the existence and uniqueness at each time step t =
tn , 1 ≤ n ≤ N , using bilinear forms. Let us rewrite (20a)–(20c) as follows:
(21a)
ā ((unh , qnh ) , (v, z)) + b((v, z), pnh ) = (f n , v),
(21b)
b((unh , qnh ), w) − c(pnh , w) = −∆t(hn , w) + α(∇ · un−1
, w)
h
for all (v, z) ∈ Uh × Vh and w ∈ Wh . Here, the bilinear forms are defined by
ā((u, q), (v, z)) = ah (u, v) + ∆t(K−1 q, z),
b((v, z), p) = −α(∇ · v, p) − ∆t(∇ · z, p),
c(p, w) = c0 (p, w).
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
1924
SON-YOUNG YI
Again, we shall prove that these bilinear forms satisfy Brezzi’s first stability condition
and the LBB inf-sup condition. To proceed, we define a discrete time-dependent norm
on the space Uh × Vh as follows:
1
|||(v, z)|||1 = (kvk21 + (∆t)2 kzk2H(div) ) 2 .
We also define
KerBh = {(v, z) ∈ Uh × Vh | b((v, z), w) = 0 ∀w ∈ Wh }
and
KerBhT = {w ∈ Wh | b((v, z), w) = 0 ∀(v, z) ∈ Uh × Vh }.
Then, we can prove the following lemma.
Lemma 5.2.
(22)
KerBh = {(v, z) ∈ Uh × Vh | αPh ∇ · v + ∆t∇ · z = 0 },
(23)
KerBhT = {0}.
Proof. In order to describe KerBh , let (v, z) ∈ KerBh . That is,
b((v, z), w) = −(α∇ · v + ∆t∇ · z, w) = 0 ∀w ∈ Wh ,
which implies that
Ph (α∇ · v + ∆t∇ · z) = 0.
Since ∇ · Vh ⊆ Wh [6], but ∇ · Uh * Wh , (v, z) satisfies
αPh ∇ · v + ∆t∇ · z = 0.
In order to prove the other direction, assume for (v, z) ∈ Uh × Vh that
αPh ∇ · v + ∆t∇ · z = 0.
Then, for any w ∈ Wh ,
b((v, z), w) = −α(∇ · v, w) − ∆t(∇ · z, w)
= −α(Ph ∇ · v, w) − ∆t(∇ · z, w)
= −(αPh ∇ · v + ∆t∇ · z, w)
= 0.
Hence, (22) follows. To prove (23), let w ∈ KerBhT and consider (v, z) ∈ Uh × Vh
such that v = 0 and ∇ · z = w. Then, b((v, z), w) = −∆t(w, w) = 0 implies that
w = 0.
Lemma 5.3. There exists a positive constant α
e > 0, independent of ∆t and h,
such that
(24)
ā((v, z), (v, z)) ≥ α
e|||(v, z)|||21
∀(v, z) ∈ KerBh .
Proof. For any (v, z) ∈ KerBh , Ph ∇ · v = − ∆t
α ∇ · z in light of (22). Therefore,
ā((v, z), (v, z)) ≥ 2µkε(v)k20 + (∆t)2
1
λ
k∇ · zk20 + ∆tkK− 2 zk20 .
α2
For sufficiently small ∆t > 0, (7) implies (24).
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
TWO MODES OF LOCKING IN POROELASTICITY
1925
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
Lemma 5.4. There exists a positive constant β > 0, independent of ∆t and h,
such that
b((v, z), w)
≥ βkwk0
(v,z)∈Uh ×Vh |||(v, z)|||1
(25)
sup
∀w ∈ Wh .
Proof. For any w ∈ Wh , there exists z ∈ (H1 (Ω))2 ∩ V such that
∇ · z = −w
(26)
and kzk1 ≤ ckwk0 for some c > 0.
Note that (17b) implies, in particular,
kΠh zk1 ≤ Ckzk1 ∀z ∈ (H1 (Ω))2
(27)
Take v = 0 and use (17a), (26), and (27) to get
kwk20
bh ((0, Πh z/∆t), w)
≥ βkwk0 .
=
|||(0, Πh z/∆t)|||1
kΠh zkH(div)
Theorem 5.5. At each time step tn , the fully discrete mixed finite element method
(20) has a unique solution (unh , qnh , pnh ) ∈ Uh × Vh × Wh .
Proof. It is trivial to see that the bilinear form c(·, ·) is positive semidefinite and
symmetric. Therefore, Lemmas 5.3 and 5.4 and (23) guarantee the existence and
uniqueness of the solution to (20) [6].
5.1.2. A priori error estimates for c0 = 0. In this section, we will examine
a priori error estimates for the discrete problem (16) with c0 = 0. To proceed, it is
necessary to require the following minimal regularity conditions for the true solution:
p ∈ L2 (0, T ; H 1 ),
u ∈ L∞ (0, T ; (H 1 (Ω))d ).
We assume further regularity conditions in order to prove optimal error estimates:
p ∈ L2 (0, T ; H 2 (Ω)) ∩ L∞ (0, T ; H 1 (Ω)),
pt ∈ L2 (0, T ; H 1 (Ω)),
ptt ∈ L2 (0, T ; L2 (Ω)),
2
u ∈ L∞ (0, T ; (H0,Γ
(Ω))d ),
d
2
ut ∈ L2 (0, T ; (H0,Γ
(Ω))d ),
d
1
utt ∈ L2 (0, T ; (H0,Γ
(Ω))d ).
d
For convenience, we introduce at this point the following notation: for any function g(t, x) and at each time tn = n∆t, n = 1, . . . , N , g n = g(tn , x) ∀x ∈ Ω. As a
result of a Taylor expansion, we have
Z tn
1
un − un−1
= unt +
(s − tn−1 )utt (s) ds.
(28)
∆t
∆t tn−1
Consider the true solution (u, q, p) at time t = tn and take test functions v ∈ Uh ,
z ∈ Vh , and w ∈ Wh in (6). Then, using the Taylor expansion, (28), we obtain
(29a)
a(un , v) − α(pn , ∇ · v) = (f n , v),
(29b)
(K−1 qn , z) − (pn , ∇ · z) = 0,
n
u − un−1
α ∇·
, w + (∇ · qn , w)
∆t
!
Z tn
α
n
n−1
= (h , w) +
(s − t
)∇ · utt (s) ds, w .
∆t
tn−1
(29c)
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1926
SON-YOUNG YI
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
Subtracting (20a), (20b), (20c) from (29a), (29b), (29c), respectively, we obtain
(30a)
a(un , v) − ah (unh , v) − α(pn − pnh , ∇ · v) = 0,
(30b)
(K−1 (qn − qnh ), z) − (pn − pnh , ∇ · z) = 0,
n
(u − unh ) − (un−1 − un−1
)
h
, w + (∇ · (qn − qnh ), w)
α ∇·
∆t
!
Z tn
α
n−1
=
(s − t
)∇ · utt (s) ds, w .
∆t
tn−1
(30c)
On the other hand, a(un , v) − ah (unh , v) in (30a) can be rewritten as
a(un , v) − ah (unh , v)
= 2µ(ε(un − unh ), ε(v)) + λ(∇ · un − Ph ∇ · un , ∇ · v)
+ λ(Ph (∇ · un − ∇ · unh ), ∇ · v) + λ(Ph ∇ · unh , ∇ · v − Ph ∇ · v)
= 2µ(ε(un − unh ), ε(v)) + λ(∇ · un − Ph ∇ · un , ∇ · v)
+ λ(Ph ∇ · (πh un − unh ), Ph ∇ · v).
Here, we utilized (17c) and (19c) in the last equality. Therefore, the first error equation
(30a) can be rewritten as
2µ(ε(un − unh ), ε(v)) + λ(∇ · un − Ph ∇ · un , ∇ · v)
+ λ(Ph ∇ · (πh un − unh ), Ph ∇ · v) − α(pn − pnh , ∇ · v) = 0.
(31)
For convenience, let us introduce the following notation for the time-dependent
auxiliary and interpolation errors:
(32)
ηu = u − πh u,
ηq = q − Πh q,
ηp = p − Ph p,
ξu = πh u − uh ,
ξq = Πh q − qh ,
ξ p = Ph p − p h .
For the time derivatives of the solution, we use similar notation. Note that
u − uh = ηu + ξu ,
q − q h = η q + ξq ,
p − ph = ηp + ξp .
Using the above notation and by (17a), (17c), and (19a), we can rewrite the system
error equations (31), (30b), (30c) as
2µ(ε(ξun ), ε(v)) + λ(Ph ∇ · ξun , Ph ∇ · v) − α(ξpn , ∇ · v)
(33a)
(33b)
(33c)
= −2µ(ε(ηun ) : ε(v)) − λ(∇ · un − Ph ∇ · un , ∇ · v) + α(ηpn , ∇ · v),
(K−1 ξqn , z) − (ξpn , ∇ · z) = −(K−1 ηqn , z),
n
ξu − ξun−1
, w + (∇ · ξqn , w)
α ∇·
∆t
!
Z tn
α
n−1
=
(s − t
)∇ · utt (s) ds, w .
∆t
tn−1
Now, taking v = ξun − ξun−1 , z = ∆tξqn , and w = ∆tξpn in (33a), (33b), and (33c),
respectively, adding the resulting equations, and then using the inequalities
(ε(ξun ), ε(ξun − ξun−1 )) ≥
1
(kε(ξun )k20 − kε(ξun−1 )k20 )
2
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1927
TWO MODES OF LOCKING IN POROELASTICITY
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
and
(Ph ∇ · ξun , Ph ∇ · (ξun − ξun−1 )) ≥
1
(kPh ∇ · ξun k20 − kPh ∇ · ξun−1 k20 ),
2
we obtain
1
λ
(kPh ∇ · ξun k20 − kPh ∇ · ξun−1 k20 ) + ∆tkK− 2 ξqn k20
2
≤ −2µ(ε(ηun ), ε(ξun − ξun−1 )) − λ(∇ · un − Ph ∇ · un , ∇ · (ξun − ξun−1 ))
!
Z tn
n
n
n−1
−1 n n
n−1
n
+ α(ηp , ∇ · (ξu −ξu ))−∆t(K ηq , ξq ) + α
(s − t
)∇ · utt (s) ds, ξp .
µ(kε(ξun )k20 − kε(ξun−1 )k20 ) +
tn−1
Sum from 1 to N and use the fact that ξu0 = 0. Then, the resulting left-hand side can
be bounded below as follows thanks to the Korn’s inequality (7):
N
N
X
X
1
1
λ
µkε(ξuN )k20 + kPh ∇ · ξuN k20 + ∆t
kK− 2 ξqn k20 ≥ CKorn,µ kξuN k21 + ∆t
kK− 2 ξqn k20 .
2
n=1
n=1
This leads us to
N
X
CKorn,µ kξuN k21 + ∆t
1
kK− 2 ξqn k20 ≤ −2µ
ε(ηun ), ε(ξun − ξun−1 )
n=1
n=1
N
X
−λ
N
X
∇ · un − Ph ∇ · un , ∇ · ξun − ξun−1
n=1
+α
N
X
N
X
ηpn , ∇ · (ξun − ξun−1 ) − ∆t
K−1 ηqn , ξqn
n=1
(34)
+α
n=1
N
X
Z
tn
!
(s − t
n−1
)∇ ·
tn−1
n=1
utt (s) ds, ξpn
:=
5
X
Φi ,
i=1
where
Φ1 = −2µ
N
X
(ε(ηun ), ε(ξun − ξun−1 )),
n=1
Φ2 = −λ
N
X
(∇ · un − Ph ∇ · un , ∇ · (ξun − ξun−1 )),
n=1
Φ3 = α
N
X
(ηpn , ∇ · (ξun − ξun−1 )),
n=1
Φ4 = −
N
X
∆t(K−1 ηqn , ξqn ),
n=1
Φ5 = α
Z
N
X
n=1
tn
tn−1
!
(s − t
n−1
)∇ ·
utt (s) ds, ξpn
.
In order to bound the quantities Φ1 –Φ5 , we repeatedly make use of Cauchy–Schwarz
and Young’s inequalities. Further, the following discrete integration by parts formula
for the grid functions f n and g n will be very useful for bounding Φ1 –Φ3 :
(35)
N
X
n=1
f n (g n − g n−1 ) = f N g N − f 0 g 0 −
N
X
(f n − f n−1 )g n−1 .
n=1
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1928
SON-YOUNG YI
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
Another useful one is the following Taylor expansion formula:
ηφn − ηφn−1 = ∆t ηφnt +
(36)
Z
tn
(s − tn−1 )ηφtt ds, φ = u, p.
tn−1
Now, we are in a position to bound each Φi . Here, we will start with Φ5 as some
techniques used to bound Φ5 will be repeatedly used for Φ1 , Φ2 , and Φ3 . To bound
Φ5 , note that
!
Z tn
N
X
n−1
n
Φ5 = α
(s − t
)∇ · utt (s) ds, ξp
tn−1
n=1
≤α
(37)
Z
N
X
k
n=1
tn
tn−1
(s − tn−1 )∇ · utt (s) dsk0 kξpn k0 .
On the other hand,
Z
tn
(s − t
(38)
n−1
)∇ · utt (s) ds ≤ (∆t)
3
2
Z
! 21
tn
k∇ ·
tn−1
tn−1
utt (s)k20
ds
and
1
kξpn k0 ≤ Cq kK− 2 ξqn k0 + kηqn k0 ∀n
(39)
for some positive constant Cq . To prove (39), consider φ ∈ (H1 (Ω))2 such that
∇ · φ = ξpn and kφk1 ≤ Cp kξpn k0 .
(40)
Then, using (17a) and (33b), we have
kξpn k20 = (ξpn , ∇ · φ) = (ξpn , ∇ · Πh φ) = (K−1 (ηqn + ξqn ), Πh φ)
1
1
− 12
kK− 2 ξqn k0 + kK− 2 ηqn k0 kΠh φk0 .
≤ kmin
Hence, (39) follows from (17b) with m = 0 and (40).
Now, we apply Young’s inequality to (37) in conjunction with (38) and (39) to see
!
Z T
N
N
X
X
1
− 12 n 2
n 2
2
2
Φ5 ≤ ∆t
kK ξq k0 + C ∆t
kηq k0 + (∆t)
k∇ · utt (s)k0 ds .
4 n=0
0
n=0
Next, let us bound Φ1 . Rewrite Φ1 using the discrete integration by parts formula
(35), and use (36) and ξu0 = 0 to get
Φ1 = −2µ
N
X
ε (ηun ) , ε ξun − ξun−1
n=1
N
X
ε(ηun − ηun−1 ), ε(ξun−1 )
= −2µ ε ηuN , ε ξuN + 2µ
n=1
N
X
= −2µ ε ηuN , ε ξuN + 2µ∆t
ε ηunt , ε ξun−1
n=1
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1929
TWO MODES OF LOCKING IN POROELASTICITY
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
+ 2µ
1 kξuN k21
!
s−t
n−1
ε (ηutt (s)) ds, ε
tn−1
n=1
≤
tn
Z
N
X
kηuN k21
+C
2
ξun−1
T
Z
kηutt (s)k21
+ (∆t)
ds + ∆t
0
N
X
!
kηunt k21
+
kξun k21
n=0
for 1 > 0. Then Φ2 and Φ3 can be bounded in a similar fashion:
Φ2 = −λ
N
X
∇ · un − Ph ∇ · un , ∇ · ξun − ξun−1
n=1
= −λ ∇ · uN − Ph ∇ · uN , ∇ · ξuN
+λ
N
X
∇ · un − un−1 − Ph ∇ · un − un−1 , ∇ · ξun−1
n=1
N
X
= −λ ∇ · uN − Ph ∇ · uN , ∇ · ξuN + λ∆t
∇ · unt − Ph ∇ · unt , ∇ · ξun−1
n=1
+λ
N
X
Z
tn
!
(s − t
n−1
) (∇ · utt (s) − Ph ∇ · utt (s)) ds, ∇ ·
tn−1
n=1
≤ 2 kξuN k21 + C
h2 λ2 k∇ · uN k21 + ∆t
N
X
ξun−1
(h2 λ2 k∇ · unt k21 + kξun k21 )
n=0
+ (∆t)2
Z
!
T
h2 λ2 k∇ · utt (s)k21 ds .
0
Φ3 = α
N
X
(ηpn , ∇ · (ξun − ξun−1 ))
n=1
= α(ηpN , ∇ · ξuN ) − α
N
X
(ηpn − ηpn−1 , ∇ · ξun−1 )
n=1
≤
3 kξuN k21
+C
kηpN k20
+ (∆t)
2
T
Z
kηptt (s)k20
0
ds +
N
X
∆t
(kηpnt k20
n=0
!
+
kξun k21 )
.
Finally,
Φ4 = −
N
X
∆t(K−1 ηqn , ξqn ) ≤
n=1
N
N
X
X
1
1
∆t
kK− 2 ξqn k20 + C∆t
kηqn k20 .
4 n=1
n=0
Combining the above bounds for Φ1 − Φ5 with (34), we obtain the following
auxiliary error estimate:
N
X
1
1
(CKorn,µ − )kξuN k21 + ∆t
kK− 2 ξqn k20
2 n=1
≤C
kηuN k21 + kηpN k20 + h2 λ2 k∇ · uN k21
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1930
SON-YOUNG YI
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
+ ∆t
N
X
(kξun k21 + kηqn k20 + kηunt k21 + kηpnt k20 + h2 λ2 k∇ · unt k21 )
n=0
+ (∆t)2
!
kηutt (s)k21 + kηptt (s)k20 + h2 λ2 k∇ · utt (s)k21 + k∇ · utt (s)k20 ds ,
T
Z
0
where = 1 + 2 + 3 . When sufficiently small 1 , 2 , and 3 are chosen, the coefficient
(CKorn,µ − ) on the left-hand side of the above inequality is positive. Apply the
discrete Gronwall’s lemma and use appropriate interpolation errors and Remark 3.4
to obtain
N
X
max kξun k21 + ∆t
1≤n≤N
1
kK− 2 ξqn k20
n=1
≤C
max kηun k21 + max kηpn k20
1≤n≤N
+ ∆t
N
X
1≤n≤N
(kηqn k20 + kηunt k21 + kηpnt k20 + h2 λ2 k∇ · unt k21 )
n=0
+ (∆t)
2
!
T
Z
kηutt (s)k21
+
kηptt (s)k20
2 2
+ h λ k∇ ·
utt (s)k21
+ k∇ ·
utt (s)k20
ds
0
(41) ≤ C h2 + (∆t)2 ,
RT
where C is independent of λ and h. Here, the boundedness of 0 k∇ · utt (s)k20 ds can
be proved in light of Remark 3.4, along with the fact that λ ∈ [λ1 , ∞).
In order to obtain an auxiliary error estimate for p, use (39) and (41) to see
(42)
∆t
N
X
kξpn k20 ≤ C h2 + (∆t)2 .
n=1
In summary, we have the following auxiliary error estimate:
(43)
max
1≤n≤N
kξun k1
N X
+ ∆t
1
kξpn k20 + kK− 2 ξqn k20 ≤ C h2 + (∆t)2 ,
n=1
where C is some constant independent of λ and h.
We now present our main error estimate result in the following theorem.
Theorem 5.6. Let (u, q, p) ∈ U × V × W be the solution of the continuous variational problem (6) and (unh , qnh , pnh ) ∈ Uh × Vh × Wh the solution of the fully discrete
problem (20). Then, assuming sufficient regularity of the true solution and the data
functions, we have the following error estimates:
(44)
max kun − unh k21 + ∆t
1≤n≤N
N X
1
kpn − pnh k20 + kK− 2 (qn − qnh )k20 ≤ C h2 + (∆t)2 ,
n=1
where C is some constant independent of h and λ.
Proof. The error estimate (44) readily follows from (43) and straightforward applications of the triangle inequality and appropriate interpolation estimates.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
TWO MODES OF LOCKING IN POROELASTICITY
1931
5.2. Higher-order elements in two dimensions. In this section, we will
consider a direct generalization of the space introduced in the previous section. Let l
be a positive integer, the case l = 1 being that considered in the previous section. For
the flow variables qh and ph , we employ the Raviart–Thomas space of index ` − 1:
Vh = {z ∈ H0,Γf (div; Ω) | z|K = (P`−1 (K))2 + xP`−1 (K) ∀K ∈ Th , },
Wh = {w ∈ L2 (Ω) | w|K ∈ P`−1 (K) ∀K ∈ Th }.
The higher-order finite element spaces for the displacement we discuss here were
introduced in [12]. Let us denote by Pek the space of polynomials of degree k:
Pek = span{xi1 xk−i
2 , 0 ≤ i ≤ k}.
On a single triangle K ∈ Th , we take the displacement vector in the polynomial
subspace of (P`+1 )2 :
2
P` (K) = P` ⊕ {λ1 λ2 λ3 Pe`−2 } .
In order to define a P` (K)-unisolvent set of degrees of freedom, let {aij , j = 1, . . . ,
` − 1}, on each edge ei of K, be the points that divide ei into l equal parts. Then, we
can choose the following local degrees of freedom:
1 ≤ i ≤ 3,
v(ai ),
v(aij ),
1 ≤ i ≤ 3, 1 ≤ j ≤ ` − 1,
R
v
·
w
ds
∀w ∈ (P`−2 )2 .
K
We assemble P` (K) ∀K ∈ Th in a usual way to define the following global displacement space:
1
Uh = {v ∈ (H0,Γ
(Ω))2 | v|K ∈ P` (K) ∀K ∈ Th }.
d
We can define interpolation operators Πh , Ph , πh that satisfy the properties in (17)
and (19) for 0 ≤ m ≤ ` and 1 ≤ k ≤ ` + 1. Then, the convergence analysis generalizes
directly from the case ` = 1, resulting in the following analogue of Theorem 5.6.
Theorem 5.7. Let (u, q, p) ∈ U × V × W be the solution of the continuous variational problem (6) and (qnh , pnh , unh ) ∈ Vh × Wh × Uh the solution of the fully discrete
problem (20). Then, assuming sufficient regularity for the true solution and data
functions, we have the following error estimates:
max kun − unh k21 + ∆t
1≤n≤N
N X
1
kpn − pnh k20 + kK− 2 (qn − qnh )k20 ≤ C h2` + (∆t)2 .
n=1
Here, C is some constant independent of h and λ.
6. The three-dimensional case: Lowest-order element. In this section, we
assume that Ω is a bounded polyhedron of R3 and Th is a triangulation of Ω that
consists of tetrahedra K with diameters bounded by h. The first-order scheme is a
very straightforward extension of the two-dimensional scheme discussed in section 5.
Again, we employ the lowest-order Raviart–Thomas space for Vh × Wh ⊂ V × W
in three dimensions:
Vh = {z ∈ H0,Γf (div; Ω) | z|K = (P0 (K))3 + xP0 (K) ∀K ∈ Th },
Wh = {w ∈ L2 (Ω) | w|K ∈ P0 (K) ∀K ∈ Th }.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
1932
SON-YOUNG YI
To define the finite element space for the displacement, let K be a tetrahedron with
vertices a1 , a2 , a3 , a4 . We denote by Fi the face opposite ai , ni its outward unit
normal, and eij the edge [ai , aj ]. Let
θ1 = n1 λ2 λ3 λ4 ,
θ2 = n2 λ3 λ4 λ1 ,
θ3 = n3 λ4 λ1 λ2 ,
θ4 = n1 λ1 λ2 λ3 ,
where λi , 1 ≤ i ≤ 4, are the barycentric coordinates with respect to the vertices of
K ∈ Th . Then, define
P1 (K) = (P1 )3 ⊕ span{θ1 , θ2 , θ3 , θ4 } ⊂ (P3 )3 .
It is easy to see that dim(P1 (K)) = 16 and the following 16 degrees of freedom are
P1 (K)-unisolvent:
(
v(ai ),
1 ≤ i ≤ 4,
R
v
·
n
ds,
1 ≤ i ≤ 4.
Fi
Finally, the corresponding global finite element space for the displacement is
1
Uh = {v ∈ (H0,Γ
(Ω))3 | v|K ∈ P1 (K) ∀K ∈ Th }.
d
The interpolation operators defined in the two-dimensional case can be extended to
the three-dimensional case in a straightforward manner and the convergence analysis generalizes directly from the two-dimensional case, resulting in the same error
estimates as in Theorem 5.6.
Remark 6.1. We will not pursue higher-order schemes in three dimensions in this
section. However, it is rather straightforward to construct higher-order finite element
spaces by combining a higher-order stable pair for the Stokes equation [7, Chapter 2,
section 2.3] and a higher-order Raviart–Thomas space.
7. Numerical experiments. In this section, we test several poroelasticity problems to validate the accuracy and efficiency of the finite element methods we proposed
in the previous sections. We solved the problems using the two-dimensional lowestorder method, i.e., a coupling of the Bernardi–Raugel element and the lowest-order
Raviart–Thomas space (BR–RT0 ) developed in section 5.1. For comparison purposes,
we also solved the problems using a coupled CG-mixed finite element method (P1 –
RT0 ) that uses continuous linear elements for the displacement and the lowest-order
Raviart–Thomas space for the flow variables [15, 16].
7.1. Accuracy for a smooth solution with a large λ. In order to confirm
the optimal convergence rates that we proved in section 5, we choose the body force,
f , in (5a) and the volumetric source/sink term, h, in (5c) so that the exact solution
on the computational domain Ω = (0, 1)2 is the following:
1
−t
u1 (x, t) = e
sin (2πy)(−1 + cos (2πx)) +
sin (πx) sin (πy) ,
µ+λ
1
−t
u2 (x, t) = e
sin (2πx)(1 − cos (2πy)) +
sin (πx) sin (πy) ,
µ+λ
p(x, t) = e−t sin (πx) sin (πy).
Note that the solution is designed to satisfy ∇·u = πe−t sin (π(x + y))/(µ+λ) → 0 as
λ → ∞ at any time t. We impose Dirichlet boundary conditions for both p and u that
are calculated from the known solutions. We tested both the BR–RT0 and P1 –RT0
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
TWO MODES OF LOCKING IN POROELASTICITY
1933
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
Table 1
Convergence study for a smooth solution with λ = 104 using P1 –RT0 method.
h
∆t
1/8
1/16
1/32
1/64
1/128
1/256
1/10
1/20
1/40
1/80
1/160
1/320
ku − uh k`∞ (H 1 )
8.081e+00
8.381e+00
8.168e+00
7.028e+00
4.795e+00
2.460e+00
Rate
kq − qh k`2 (L2 )
-0.05
0.04
0.22
0.55
0.96
1.422e-01
5.533e-02
2.333e-02
1.043e-02
4.901e-03
2.395e-03
Rate
kp − ph k`2 (L2 )
Rate
1.36
1.25
1.16
1.09
1.03
1.891e-02
9.610e-03
4.864e-03
2.448e-03
1.228e-03
6.153e-04
0.98
0.98
0.99
0.99
1.00
Table 2
Convergence study for a smooth solution with λ = 104 using BR–RT0 method.
h
∆t
1/8
1/16
1/32
1/64
1/128
1/256
1/10
1/20
1/40
1/80
1/160
1/320
ku − uh k`∞ (H 1 )
1.206e+00
6.237e-01
3.183e-01
1.610e-01
8.099e-02
4.062e-02
Rate
kq − qh k`2 (L2 )
0.95
0.97
0.98
0.99
1.00
1.604e-01
5.798e-02
2.395e-02
1.074e-02
5.059e-03
2.450e-03
Rate
kp − ph k`2 (L2 )
Rate
1.47
1.28
1.16
1.09
1.05
1.908e-02
9.615e-03
4.864e-03
2.448e-03
1.228e-03
6.148e-04
0.99
0.98
0.99
1.00
1.00
elements to emphasize the efficiency of the new method for a nearly incompressible
material case. So, we choose the following material parameters:
c0 = 0, α = 1.0, κ = 1.0, λ = 104 , µ = 1.0.
Our computations are based on uniform triangular meshes. The errors and convergence rates are summarized in Tables 1 and 2. Table 1 clearly illustrates locking
effects when the P1 –RT0 element is used; the error in the displacement measured in
L∞ (0, T ; H 1 (Ω)) stagnates on the coarser grids, then starts decreasing slowly as the
mesh gets further refined. In this case, however, the method still yields the optimal
rates for the pressure and flux variables in L2 (0, T ; L2 (Ω)). On the contrary, Table 2
shows that the BR–RT0 element yields the optimal convergence rate for each variable
as expected by the convergence analysis. Therefore, we can conclude that the new
method is locking-free even for a nearly incompressible material case.
7.2. Overcoming pressure oscillations. One of the main motivations for developing the new mixed finite element method presented in the previous sections was
to overcome spurious oscillations in the pressure variable for a certain set of parameters. Here we consider two test problems: a cantilever bracket problem and Barry
and Mercer’s problem to show the eliminated pressure oscillations shown in previous
literature [17, 18, 22].
First, we consider a cantilever bracket problem. The computational domain is
the unit square [0, 1] × [0, 1]. For the flow problem, a no-flow boundary condition is
imposed along the entire boundary. For the elasticity problem, we assume that the
left side edge is clamped, that is, a no-displacement boundary condition is imposed.
We also impose a downward traction at the top side and a traction-free boundary
condition at the right and bottom sides. The initial displacement and pressure are
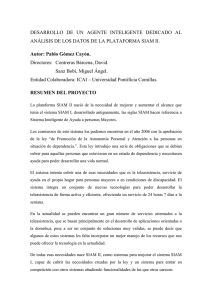
assumed to be zero. We set ∆t = 0.001 and use the following material parameters:
α = 0.93,
c0 = 0,
K = 10−7 ,
E = 105 ,
ν = 0.4.
Figure 1 shows a comparison of the pressure profiles after one time step using
the two different methods. One can observe that the pressure computed using the
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1934
SON-YOUNG YI
Pressure
10
4
2
0
0
−10
−2
−20
1
−4
1
1
0.5
1
0.5
0.5
0
y
0
0.5
0
y
x
0
x
Fig. 1. Pressure profile for the cantilever bracket problem at time t = 0.001. Results are
produced using the P1 –RT0 (left) and BR–RT0 (right) methods.
Pressure Cross−Section
0.050
y=0.036
y=0.107
y=0.179
y=0.250
Pressure
0.040
0.030
0.020
0.010
0.000
−0.010
0
0.2
0.4
0.6
0.8
1
x
(a) P1 –RT0 method
Pressure Cross−Section
0.025
y=0.036
y=0.107
y=0.179
y=0.250
0.020
Pressure
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
Pressure
0.015
0.010
0.005
0.000
−0.005
0
0.2
0.4
0.6
0.8
1
x
(b) BR–RT0 method
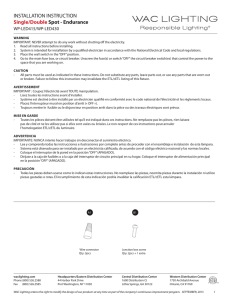
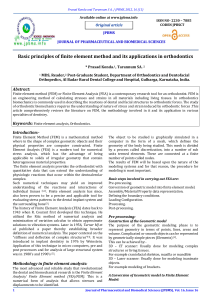
Fig. 2. Cross sections of the pressure for the Barry and Mercer problem.
P1 –RT0 method has spurious oscillations that are mostly concentrated at the top and
bottom corners of the domain along the left side. On the other hand, the pressure
computed using the BR–RT0 does not suffer from pressure oscillations.
The second test problem we consider is Barry and Mercer’s problem [1], for which
the exact analytic solution is known for the case of a source of fluid at an arbitrary
point under a specific set of boundary conditions. This solution is often used for
testing numerical schemes for poroelastic flow and deformations due to their relative
simplicity. For this problem, we choose the following material parameters:
α = 1.0,
c0 = 0,
K = 10−6 ,
E = 105 ,
ν = 0.1.
Figure 2 shows a comparison of the pressure variable produced by the P1 –RT0 and
BR–RT0 methods. We illustrate the pressure profile along different horizontal lines
in the domain, y = 0.036, y = 0.107, y = 0.179, y = 0.250. It clearly shows that
the P1 –RT0 method produced nonphysical oscillations in the pressure variable while
nearly all oscillations have been eliminated by the new method.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
TWO MODES OF LOCKING IN POROELASTICITY
1935
8. Conclusions. We have investigated two modes of locking in Biot’s consolidation model under a certain set of parameters. One is the well-known spurious
oscillations in the pressure variable when the specific storage term, c0 , is null and the
permeability is low, and at early times. The other locking mode that we investigated
is Poisson locking when λ → ∞, which has not received much attention so far in
poroelasticity. We tried to analyze the cause of each locking mode, then developed
a family of new finite element methods that suffer from neither pressure oscillations
nor Poisson locking.
First, by studying the regularity of the solution of the Biot model, we proved that
the displacement in the linear poroelasticity problem gets into a divergence-free state
as λ → ∞, just as in linear elasticity. Therefore, Poisson locking is anticipated for the
poroelaticity equations if continuous linear elements on a triangular mesh or bilinear
elements on a rectangular mesh are used for the displacement. The examination of the
cause of spurious pressure oscillations in the three-field mixed finite element method
was done from an algebraic point of view. We conclude that pressure oscillations
occur due to the incompatibility of the spaces for the displacement and pore pressure,
assuming that the flux and pressure spaces satisfy the inf-sup condition.
The proposed family of mixed finite elements employs the Raviart–Thomas space
for the flow variables and the Bernardi and Raugel element [2] for the displacement. In
order to obtain the uniform convergence of the displacement error with respect to λ,
the discrete weak formulation was modified using the method of reduced integration.
We presented the lowest-order element in the family in the two-dimensional case
first, and then extended it to higher-order elements in two dimensions and finally in
three dimensions. We proved the existence and uniqueness theorem and also derived
an optimal convergence rate for the displacement in the L∞ (0, T ; H 1 (Ω)) norm and
the flow variables in the L2 ([0, T ]; L2 (Ω)) norm. Several numerical experiments have
confirmed that the method neither shows performance deterioration as the material
becomes nearly incompressible nor suffers from spurious pressure oscillations for a
null c0 and a very low permeability.
Acknowledgments. The author would like to thank the anonymous reviewers
for their helpful and constructive comments that greatly contributed to improving the
final version of the paper. She is also grateful to Maranda Bean for her help with
implementation of the proposed method.
REFERENCES
[1] S. I. Barry and G. N. Mercer, Exact solutions for two-dimensional time-dependent flow
and deformation within a poroelastic medium, Trans. ASME J. Appl. Mech., 66 (1999),
pp. 536–540.
[2] C. Bernardi and G. Raugel, Analysis of some finite elements for the Stokes problem, Math.
Comp., 44 (1985), pp. 71–79.
[3] M. Biot, General theory of three-dimensional consolidation, J. Appl. Phys., 12 (1941), pp.
155–164.
[4] J. Booker and J. Small, An investigation of the stability of numerical solutions of biot’s
equations of consolidation, Int. J. Solids Struct., 11 (1975), pp. 907–917.
[5] S. C. Brenner and L. R. Scott, The Mathematical Theory of Finite Element Methods, Texts
in Appl. Math., 15, Springer-Verlag, New York, 1994.
[6] F. Brezzi and M. Fortin, Mixed and Hybrid Finite Element Methods, Springer Ser. Comput.
Math., 15, Springer-Verlag, New York, 1991.
[7] V. Girault and P.-A. Raviart, Finite Element Methods for Navier-Stokes Equations: Theory
and Algorithms, Springer Ser. Comput. Math., 5, Springer-Verlag, Berlin, 1986.
[8] J. B. Haga, H. Osnes, and H. P. Langtangen, On the causes of pressure oscillations in lowpermeable and low-compressible porous media, Int. J. Numer. Anal. Methods Geomech.,
36 (2012), pp. 1507–1522.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
Downloaded 08/10/17 to 165.123.34.86. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php
1936
SON-YOUNG YI
[9] R. Lewis and B. Schrefler, The Finite Element Method in the Static and Dynamic Deformation and Consolidation of Porous Media, Wiley, New York, 1998.
[10] R. Liu, Discontinuous Galerkin Finite Element Solution for Poromechanics Problem, Ph.D.
thesis, University of Texas at Austin, 2004.
[11] D. Malkus and T. Hughes, Mixed finite element methods—reduced and selective integration
techniques: A unification of concepts, Comput. Methods Appl. Mech. Engrg., 15 (1978),
pp. 63–81.
[12] L. Mansfield, Finite element subspaces with optimal rates of convergence for the stationary
Stokes problem, RAIRO Anal. Numér., 16 (1982), pp. 49–66.
[13] M. Murad, V. Thomée, and A. F. D. Loula, Asymptotic behavior of semidiscrete finiteelement approximations of Biot’s consolidation problem, SIAM J. Numer. Anal., 33 (1996),
pp. 1065–1083.
[14] J. A. Nitsche, On Korn’s second inequality, RAIRO Anal. Numér., 15 (1981), pp. 237–248.
[15] P. Phillips and M. Wheeler, A coupling of mixed and continuous Galerkin finite element
methods for poroelasticity. I. The continuous in time case, Comput. Geosci., 11 (2007),
pp. 131–144.
[16] P. Phillips and M. Wheeler, A coupling of mixed and continuous Galerkin finite element
methods for poroelasticity. II. The discrete-in-time case, Comput. Geosci., 11 (2007),
pp. 145–158.
[17] P. Phillips and M. Wheeler, A coupling of mixed and discontinuous Galerkin finite-element
methods for poroelasticity, Comput. Geosci., 12 (2008), pp. 417–435.
[18] P. Phillips and M. Wheeler, Overcoming the problem of locking in linear elasticity and
poroelasticity: An heuristic approach, Comput. Geosci., 13 (2009), pp. 5–12.
[19] M. Reed, An investigation of numerical errors in the analysis of consolidation by finite elements, Int. J. Numer. Anal. Methods Geomech., 8 (1984), pp. 243–257.
[20] R. Sandhu and E. Wilson, Finite element analysis of seepage in elastic media, J. Eng. Mech.
Div. ASCE, 95 (1969), pp. 641–652.
[21] J. Wan, Stabilized Finite Element Methods for Coupled Geomechanics and Multiphase Flow,
Ph.D. thesis, Stanford University, 2002.
[22] S.-Y. Yi, A coupling of nonconforming and mixed finite element methods for Biot’s consolidation model, Numer. Methods Partial Differential Equations, 29 (2013), pp. 1749–1777.
[23] S.-Y. Yi, Convergence analysis of a new mixed finite element method for Biot’s consolidation
model, Numer. Methods Partial Differential Equations, 30 (2014), pp. 1189–1210.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.