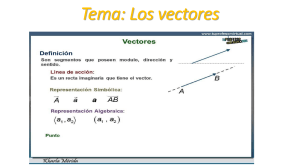
PRODUCTO ESCALAR u v u1 v1 u 2 v2 u3 v3 PROYECCIÓN u v proy v u 2 v v / / u v u v cos u v proy v u v DISTANCIA ENTRE DOS PUNTOS DEL PLANO/ESPACIO d p, q x2 x1 2 y2 y1 2 ( z 2 z1 ) 2 PUNTO MEDIO DE UN SEGMENTO x x2 y1 y 2 z1 z 2 M xm , y m 1 , , 2 2 2 PRODUCTO VECTORIAL u v u v sen i j k u v u1 u 2 u 3 u 2 v3 u 3 v 2 i u1 v3 u 3 v1 j u1 v 2 u 2 v1 k v1 v2 v3 PRODUCTO MIXTO u1 u 2 u v w v1 v2 w1 w2 u3 v3 u1 v2 w3 v3 w2 u 2 v1 w3 v3 w1 u3 v1 w2 v2 w1 w3 ECUACIONES DE PLANOS Ecuación vectorial (vector normal): x x0 , y y0 , z z 0 n1 , n2 , n3 0 Ecuación vectorial (vectores paral.): x, y, z x0 , y0 , z 0 1 u1 , u 2 , u3 2 v1 , v2 , v3 Ecuación general: Ax By Cz D 0 x x0 1u1 2 v1 Ecuaciones paramétricas: y y 0 1u 2 2 v 2 z z u v 0 1 3 2 3 Ecuación segmentaria: x y z D D 1 D A B C ÁNGULO ENTRE PLANOS A1 A2 B1 B2 C1 C 2 cos 2 A1 B12 C12 A22 B22 C 22 DISTANCIA DE UN PUNTO A UN PLANO A x1 B y1 C z1 D d P1 , A2 B 2 C 2 HAZ DE PLANOS A1 x B1 y C1 z D1 A2 x B2 y C2 z D2 0 RECTAS EN EL ESPACIO 1 Ecuación vectorial: x, y, z x0 , y0 , z 0 u1 , u 2 , u3 x x0 u1 Ecuaciones paramétricas: y y 0 u 2 z z u 0 3 x x0 y y 0 z z 0 Ecuaciones simétricas: u1 u2 u3 ÁNGULO ENTRE RECTAS u v cos u v ÁNGULO ENTRE RECTA Y PLANO u1 A u 2 B u 3 C sen u12 u 22 u 32 A 2 B 2 C 2 DISTANCIA DE UN PUNTO A UNA RECTA u P0 P1 d P1 , R u DISTANCIA ENTRE RECTAS ALABEADAS P0 P1 u v d R, S u v 2 MATRICES – DETERMINANTES PROPIEDADES DE LA ADICIÓN: A, B mn A B mn A B C A B C A N N A A A A A A N A B B A PROPIEDADES DEL PRODUCTO POR UN ESCALAR A mn . A mn . A . A A A A A B A B 1.A A PROPIEDADES DEL PRODUCTO DE MATRICES A.BC AB.C AB C A.B A.C A.B B. A A.B=A.C no se cumple que B=C A.B=N no necesariamente A=N v B=N PROPIEDADES DE LAS MATRICES SIMETRICAS Y ANTISIMETRICAS t A B At B t . At A.B t . At B t . At A A t A A t t A. At A. At t A At A At t PROPIEDADES DE LAS MATRICES INVERSIBLES Si una matriz es inversible su inversa es única 1 A, B nn A.B B 1 . A 1 A 1 1 .A 1 1 A 1 . A1 0 k A k A 1 Una matriz A es ortogonal A. At At . A I 3 TEOREMA DE CRAMER: si A es una matriz inversible de orden n B n1 el sistema A.X B tiene exactamente una solución, que se obtiene asignando a cada incognita el cociente de dos determinantes. El determinante del denominador es el de la matriz del sistema y el del numerador es el de la matriz que se obtiene sustituyendo del anterior la columna de los coeficientes de la incógnita por la columna de los términos independientes. TEOREMA DE ROUCHÉ-FROBENIUS: un sistema de m ecuaciones lineales con n incógnitas es compatible si y sólo si el rango de la matriz del sistema es igual al rango de la matriz ampliada. Enunciado: Cs R A R A B Pueden ocurrir dos alternativas: R A R A B n (n el numero de incógnitas), el sistema es DETERMINADO. R A R A B n , el sistema es INDETERMINADO. PROPIEDAD: A mn X n1 S X / A. X 0es subespacio de n1 (el conjunto solución de un sistema homogéneo es un subespacio) Y su dimensión se define: dim S n R( A) 4 ESPACIOS VECTORIALES Un conjunto V es un espacio vectorial y se escribe V ,, , si es un conjunto no vacío en el que se cumple que: existe el vector nulo, para cada vector existe un opuesto, se cumple una ley de composición interna en la suma de vectores y de composición externe en el producto entre escalares reales y vectores. SUBESPACIOS VECTORIALES Un conjunto S no vacío e incluído en V siendo V ,, , un espacio vectorial, S es un subespacio de V si se cumplen las siguientes condiciones: S V S x, y S x y S x S x S Únicos subespacios de 2 : 0,0, 2 ,rectas que pasen por el origen Únicos subespacios de 3 : 0,0,0, 3 , rectas que pasen por el origen, planos que pasen por el origen. COMBINACIÓN LINEAL Sea V ,, , espacio vectorial y sean v1 , v2 ,..., vr V ; w es combinación lineal de v1 , v2 ,..., vr si w 1v1 2 v2 r vr con 1 , 2 ,, r . Si 1 2 r 0 la C.L. es la trivial y se obtiene el vector nulo. SISTEMAS DE GENERADORES Sea V ,, , e.v. y sean v1 , v2 ,..., vr V ; los vectores v1 , v2 ,..., vr forman un sistema de generadores de V o generan a V si todo vector de V puede exprearse como C.L. de ellos. Definición: w V , 1 , 2 ,, r / w 1v1 2 v2 r vr Propiedad: Si el sistema v1 , v2 ,, vr incluido en V es generador de V y uno de los vectores que lo forman es C.L. de los otros, entonces el subsistema que resulta al suprimir ese vector también es generador de V. DEPENDENCIA E INDEPENDENCIA LINEAL La ecuación 1v1 2 v2 r vr 0 tiene siempre solución trivial Si la trivial es la única solución entonces los vectores son linealmente independientes. Si además tiene otras soluciones, los vectores son linealmente dependientes. Observaciones y propiedades: Todo sistema que contenga al vector nulo es L.D. Todo sistema con un único vector no nulo es L.I. 5 El sistema v1 , v2 ,, vr es L.D. si y solo si algunos de los vectores del sistema es C.L. de los restantes. Si un sistema tiene dos vectores no nulos, si uno es múltiplo del otro son L.D.; caso contrario son L.I. En 2 y 3 dos vectores L.D. son paralelos. BASE DE UN ESPACIO VECTORIAL B v1 , v2 ,, vn es base de V B es S.G. de V ^ B es L.I. Si se comprueba cualquiera de las dos condiciones ya se puede decir que es base. Llamamos bases canónicas de n a por ejemplo: 1,0, 0,1 en 2 1,0,0, 0,1,0, 0,0,1 en 3 DIMENSIÓN Todo espacio vectorial de dimensión finita que no se reduzca al vector nulo admite por lo menos una base. Si V es un e.v. de dimensión finita, todas sus bases tienen el mismo número n de vectores que se llama dimensión de V y se nota: dim V n Se define dim 0 0 dim n n dim mn m n dim Pn n 1 Observaciones: sea dim V n Todo sistema con más de n vectores de V, son L.D. Todo sistema con menos de n vectores de V, no generan a V. Todo sistema de n vectores L.I., forman una base de V. Todo S.G. de V con n vectores, forman una base de V Propiedad: Sea dim V n y sea un conjunto de r vectores (r<n) L.I., el conjunto puede extenderse a una base de V agregándole (n-r) vectores, formando de esta manera un conjunto L.I. de n vectores de V. BASE DE UN SUBESPACIO B es base de un subespacio S si B es un conjunto L.I. y forma un S.G. de S. Si dim V n y S subespacio de V, entonces dim S n y si dim S n S V COORDENADAS DE UN VECTOR EN UNA BASE si B u1 , u 2 ,, u n base de V v V !1 , 2 ,, n / v 1u1 2 u 2 n u n 6 Se nota: v B 1 2 n OPERACIONES CON SUBESPACIOS Intersección: Sean S1 y S2 subespacios de V, entonces: S1 S 2 x V / x S1 x S 2 es un subespacio de V denominado subespacio intersección. Suma: Sean S1 y S2 subespacios de V, entonces S1 S 2 x V / x x1 x2 con x1 S1 x2 S 2 es un subespacio de V llamado subespacio suma. Propiedades: S1 S 2 S S1 S 2 S S1 S 2 0 (suma directa) dim S1 S 2 dim S1 dim S 2 dim S1 S 2 CONJUNTO ORTOGONAL Y ORTONORMAL DE VECTORES Un conjunto de vectores de un espacio vectorial es un conjunto ortogonal si todos los pares de vectores del conjunto son ortogonales entre si (producto escalar = 0). Un conjunto ortogonal en el que cada vector tiene norma 1 es ortonormal. Propiedades: Todo conjunto ortogonal de vectores no nulos de un espacio vectorial V es un conjunto L.I. Todo e.v. V que no sea el nulo y que tenga dimensión finita tiene una base ortonormal. COMPLEMENTO ORTOGONAL DE UN SUBESPACIO Sea S subespacio de V: Se llama complemento ortogonal de S al conjunto formado por todos los vectores de V que son ortogonales a todos los vectores de S: S x V / x y 0 y S Propiedades: S es un subespacio de V Si dim V n dim S dim S dim V S S V 7 ESPACIO FILA Y ESPACIO COLUMNA DE UNA MATRIZ Se llama espacio fila de A al subespacio de n generado por los vectores fila de A. Se llama espacio columna de A al subespacio de n generado por los vectores columna de A. Se llama rango fila de A a la dimensión de Sf A Se llama rango columna de A a la dimensión de Sc A El rango fila y el rango columna de una matriz son iguales. Se llama rango de una matriz a su rango fila y a su rango columna. 8 TRANSFORMACIONES LINEALES DEFINICIÓN: Sean V y W espacios vectoriales sobre , la función T : V W es una transformación lineal de V en W si se verifican los criterios de linealidad. CRITERIOS DE LINEALIDAD: T x x T x T x x, x V T .x .T x x V PROPIEDADES: Sea T : V W transformación lineal T 0V 0W T x T x T x x T x T x NÚCLEO DE UNA TRANSFORMACIÓN LINEAL: Sea T : V W Se llama núcleo de T al conjunto de los vectores de V cuya imagen mediante T es 0W. NuT Ker T x V / T x 0W El núcleo de T es un subespacio de V. IMAGEN DE UNA TRANSFORMACIÓN LINEAL: sea T : V W Se llama conjunto imagen de T al conjunto de vectores de W que son imágenes mediante T de al menos un vector de V. ImT y W / x V T x y La imagen de T es un subespacio de W. TEOREMA DE LAS DIMENSIONES Sea T : V W transformación lineal dim V dim NuT dim ImT O bien de otra manera: n nulidad T rangoT 9 TRANSFORMACIONES MATRICIALES: Sea A mn ; si se consideran los vectores de m y los vectores de n expresados como matriz columna, se puede definir la transformación lineal T de n en m como: T : n m / T X A. X Donde A se llama matriz estándar. CLASIFICACIÓN DE LAS TRANSFORMACIONES LINEALES Sea T : V W transformación lineal: T es MONOMORFISMO T es INYECTIVA NuT 0V T es EPIMORFISMO T es SOBREYECTIVA ImT W T es ISOMORFISMO T es BIYECTIVA NuT 0V ImT W T es ENDOMORFISMO V W TEOREMA FUNDAMENTAL DE LAS TRANSFORMACIONES LINEALES Sean V y W espacios vectoriales sobre , y sea B v1 , v2 ,, vn base de V y t1 , t 2 ,, t n vectores arbitrarios de W ! t.l. T : V W / T v1 t i i 1,, n (Si tenemos una base de V con los transformados de cada uno de sus vectores entonces podemos formar una única transformación lineal con ellos) o En los ejercicios dependiendo de los datos que nos den se pueden formar una única transformación lineal, infinitas o que no exista la misma (hay que comprobar si son L.I. los vectores que nos dan o si nos faltan vectores para armar una base) MATRIZ ASOCIADA A UNA TRANSFORMACIÓN LINEAL Sean T : V W t.l. / dim V n dim W m Sea B1 u1 , u 2 ,, u n base de V Sea B2 v1 , v2 ,, vm base de W La transformación lineal T queda caracterizada por una matriz A mn , siendo su número de filas igual a la dimensión del codominio de T y su número de columnas igual a la dimensión del dominio de T. A la matriz A se la llama matriz asociada a T en las bases B1 y B2: a11 a12 a1n a 21 a 22 a 2 n A M T B1B2 a a a m2 mn m1 10 a11 a 21 Siendo el vector columna las coordenadas de T(u1) en la base B2 , el vector columna a m1 a12 a1n a 22 a2n las coordenadas de T(u2) en la base B2 y el vector columna las coordenadas de a a m2 mn T(un) en la base B2 . RESUMIDO: M T B1B2 T u1 B2 T u2 B 2 T un B2 OBSERVACIÓN: Sea T : V W t.l. / dim V n dim W m , B1 u1 , u 2 ,, u n base de V, y B2 v1 , v2 ,, vm base de W; entonces: M T B1B2 x B1 T x B2 ACLARACIÓN: Las bases canónicas se suelen denominar como E y E’. 11 MATRIZ ASOCIADA A LA TRANSFORMACIÓN LINEAL INVERSA Sea T : V V T.L. BIYECTIVA (Los subespacios V no tienen que ser necesariamente iguales, tienen que tener igual dimensión) Con dim V n T 1 : V V T.L. Sea B1 base de V y B2 base de V y sea A M T B1B2 mn A1 M T 1 B2 B1 MATRIZ ASOCIADA A LA COMPUESTA DE TRANSFORMACIONES LINEALES Sean T1 : V W T2 : U V T1 T2 : U W T.L. Con dim U n , dim V p , dim W m Sean B1 base de U, B2 base de V y B3 base de W; y sean: A M T1 B2 B3 m p B M T2 B1B2 pn M T1 T2 B1B3 A B mn La composición se puede hacer tanto matricialmente como aplicando T1 T2 x MATRIZ CAMBIO DE BASE O DE CAMBIO DE COORDENADAS Considerando la transformación lineal identidad Id : V V / Id x x Considerando B1 u1 , u 2 ,, u n base de V, y B2 v1 , v2 ,, vm base de W; entonces: M Id B1B2 x B1 Id x B2 x B2 La matriz asociada a la identidad actúa como matriz cambio de base o matriz cambio de coordenadas de la base B1 a la base B2. NOTACIÓN: M Id B1B2 PB1 B2 P FÓRMULA: PB1 B2 xB1 x B2 P X X OBSERVACIÓN: B1 B2 PB1 B2 I n PROPIEDAD: La matriz PB1 B2 es regular y P 1 PB1 B2 1 PB2 B1 12 AUTOVALORES Y AUTOVECTORES Sea T : V V endomorfismo DEFINICIÓN: El vector x V es un autovector o vector propio de T x 0 v / T x x . A λ se lo llama autovalor o valor propio asociado a x. DEFINICIÓN DE FORMA MATRICIAL: Sea A nn El vector X n1 es un autovector de A X 0 n1 / A. X . X A λ se lo lama autovalor asociado a X. PROPIEDAD: autovalor de A A .I 0 OBSERVACIÓN: P A .I Polinomio característico cuyas raíces van a ser los autovalores de A A .I 0 Ecuación característica. OBSERVACIÓN: Una vez hallados los autovalores al reemplazarlos en el sistema homogéneo A.X .X que es compatible indeterminado queda formado un subespacio de n1 llamado subespacio propio asociado a λ (o autoespacio): S X n1 / A. X . X MATRIZ SEMEJANTE: Una matriz B de orden n es semejante a una matriz A de orden n si existe una matriz regular P de orden n / B P 1 . A.P . Dos matrices semejantes representan el mismo endomorfismo en bases distintas. PROPIEDAD: B P 1 . A.P PB PA DEFINICIÓN: Una matriz A de orden n es diagonalizable tiene n autovectores L.I. En este caso A es semejante a una matriz diagonal D cuyos elementos en la diagonal son los autovalores de A mientras que P es una matriz cuyas columnas son respectivamente los n autovectores L.I. de A. ( D P 1 . A.P ) PROPIEDAD: Si los autovalores de A son reales y distintos, los autovectores asociados son L.I. MULTIPLICIDAD ALGEBRAICA Y GEOMÉTRICA: A k se lo llama multiplicidad algebraica y a p se lo llama multiplicidad geométrica. PROPIEDAD: El subespacio propio asociado a un autovalor λ de multiplicidad k 1 tiene dimensión p k CONSECUENCIAS DE ESTA PROPIEDAD: El subespacio propio asociado a un autovalor simple es de dimensión 1. A es diagonalizable k=p para todo autovalor. 13 DIAGONALIZACIÓN DE MATRICES SIMÉTRICAS: PROPIEDADES: Si A es una matriz real de orden n simétrica λ son números reales. Si A matriz simétrica de orden n A tiene n autovectores ortonormales. Una matriz es diagonalizable ortogonalmente es simétrica 14 ECUACIONES DE TRANSLACIÓN: x x x0 y y y0 CÓNICAS CIRCUNFERENCIA Es el lugar geométrico de los puntos del plano que equidistan de un punto fijo llamado centro una distancia constante llamada radio. ECUACIONES DE LA CIRCUNFERENCIA: 2 2 x x0 y y0 r 2 Ecuación canónica o cartesiana x 2 y 2 Dx Ey F 0 Ecuación general x x0 r. cos t 0 t 2 posible ecuación paramétrica y y 0 r.sent z c r con z C Expresión compleja de la circunferencia PARÁBOLA Dados en el plano una recta d llamada directriz y un punto F llamado foco se llama parábola al lugar geométrico de los puntos del plano del plano que equidistan del foco y de la directriz 15 PARÁBOLA DE EJE PARALELO AL EJE X ECUACIONES: 2 y y0 2 px x0 Ecuación canónica y y0 t 2 x x t 0 2p t Posible ecuación paramétrica ELEMENTOS PARÁMETRO: p VÉRTICE: V x0 , y 0 FOCO: F x0 p , y 0 2 DIRECTRIZ: d : x x0 p EJE FOCAL: y y0 LONGITUD DEL LADO RECTO: 2. p 2 PARÁBOLA DE EJE PARALELO AL EJE Y 16 ECUACIONES: 2 x x0 2 p y y0 Ecuación canónica x x0 t 2 y y t 0 2p t Posible ecuación paramétrica ELEMENTOS: PARÁMETRO: p VÉRTICE: V x0 , y 0 FOCO: F x0 , y 0 p 2 DIRECTRIZ: d : y y0 p EJE FOCAL: x x0 LONGITUD DEL LADO RECTO: 2. p 2 ELIPSE Dados en el plano dos puntos distintos F1 y F2 llamados focos y un numero positivo a de modo tal que d F1 , F2 2a , se llama elipse al lugar geométrico de los puntos del plano tales que la suma de sus distancias a F1 y F2 resulta constante e igual a 2a. CONDICIÓN IMPORTANTE EN TODAS LAS ELIPSES: 17 a2 b2 c2 con a b ELIPSE DE EJE PARALELO AL EJE X ECUACIONES: x x0 2 y y 0 2 1 Ecuación canónica de la elipse. a2 b2 x x0 a cos t 0 t 2 Posible ecuación paramétrica. y y 0 bsent z F1 z F2 2a expresión compleja de una elipse ELEMENTOS: CENTRO: C x0 , y 0 EJE FOCAL: y y0 FOCOS: F1 xo c, y0 F2 x0 c, y0 VÉRTICES: V1 x0 a, y0 V2 x0 a, y0 INTERSECCIONES CON EL EJE x x0 : B1 x0 , y0 b B2 x0 , y0 b EJE MAYOR: 2a EJE MENOR: 2b EXCENTRICIDAD: e c <1 en elipses a 2b 2 LONGITUD LADO RECTO: a ELIPSE DE EJE PARALELO AL EJE Y: 18 ECUACIONES: x x0 2 y y 0 2 1 Ecuación canónica de la elipse. b2 a2 x x0 bsent 0 t 2 Posible ecuación paramétrica. y y0 a cos t z F1 z F2 2a expresión compleja de una elipse ELEMENTOS: CENTRO: C x0 , y 0 EJE FOCAL: x x0 FOCOS: F1 xo , y0 c F2 x0 , y0 c VÉRTICES: V1 x0 , y0 a V2 x0 , y0 a INTERSECCIONES CON EL EJE y y0 : B1 x0 b, y0 B2 x0 b, y0 EJE MAYOR: 2a EJE MENOR: 2b c <1 en elipses a 2b 2 LONGITUD LADO RECTO: a HIPÉRBOLA Dados en el plano dos puntos distintos F1 y F2 llamados focos y un número real positivo a tal que d F1 , F2 2a , se llama elipse al lugar geométrico de los puntos del plano tales que la EXCENTRICIDAD: e diferencia de sus distancias a F1 y F2 resulta constante e igual a 2a. CONDICIÓN IMPORTANTE EN TODAS LAS HIPÉRBOLAS: c2 a2 b2 con c a c b HIPÉRBOLA DE EJE PARALELO AL EJE X 19 ECUACIONES: x x0 2 y y 0 2 1 Ecuación canónica de la hipérbola. a2 b2 x x0 a sec t 0 t 2 t 2 t 3 2 Posible ecuación paramétrica. y y b tan t 0 z F1 z F2 2a expresión compleja de una hipérbola ELEMENTOS: CENTRO: C x0 , y 0 EJE FOCAL: y y0 FOCOS: F1 xo c, y0 F2 x0 c, y0 VÉRTICES: V1 x0 a, y0 V2 x0 a, y0 b ASÍNTOTAS: y x a EJE REAL: 2a EJE CONJUGADO: 2b c EXCENTRICIDAD: e >1 en hipérbolas a 2b 2 LONGITUD LADO RECTO: a HIPÉRBOLA DE EJE PARALELO AL EJE Y 20 ECUACIONES: y y 0 2 x x0 2 1 Ecuación canónica de la hipérbola. a2 b2 x x0 b tan t 0 t 2 t 2 t 3 2 Posible ecuación paramétrica. y y a sec t 0 z F1 z F2 2a expresión compleja de una hipérbola ELEMENTOS: CENTRO: C x0 , y 0 EJE FOCAL: x x0 FOCOS: F1 xo , y0 c F2 x0 , y0 c VÉRTICES: V1 x0 , y0 a V2 x0 , y0 a a ASÍNTOTAS: y x b EJE REAL: 2a EJE CONJUGADO: 2b c EXCENTRICIDAD: e >1 en hipérbolas a 2b 2 LONGITUD LADO RECTO: a ECUACIONES DE SEGUNDO GRADO EN 2 VARIABLES Ax 2 By 2 Cx Dy E 0 Si A B posible circunferencia: Puede ser circunferencia Degenerar en un punto No existir lugar geométrico 21 Si A 0 B 0 posible parábola: Puede ser parábola Degenera en 2 rectas paralelas Degenera en 1 recta No existe lugar geométrico Si sgn A sgn B (signo de a = b), posible elipse: Puede ser elipse Degenerar en un punto No existir lugar geométrico Si sgn A sgn B , posible hipérbola: Puede ser hipérbola Degenera en 2 rectas que se cortan 22 CUÁDRICAS Se llama superficie cuádrica al conjunto de puntos del espacio cuyas coordenadas satisfacen una ecuación de 2° grado en tres variables. CUÁDRICAS CON CENTRO Mx 2 Ny 2 Pz 2 R ELIPSOIDE: x2 y2 z2 1 a2 b2 c2 (Si a b c , esfera) HIPERBOLOIDE DE UNA HOJA: x2 y2 z2 1 a2 b2 c2 HIPERBOLOIDE DE DOS HOJAS: x2 y2 z2 2 2 2 1 a b c 23 CILINDRO ELÍPTICO (CIRCULAR) RECTO: x2 y2 1 a2 b2 CILINDRO x2 y2 1 a2 b2 HIPERBÓLICO RECTO: SUPERFICIE CÓNICA RECTA: x2 y2 z2 1 a2 b2 c2 CUÁDRICAS SIN CENTRO Mx 2 Ny 2 Sz 24 PARABOLOIDE ELÍPTICO: x2 y2 cz a2 b2 PARABOLOIDE HIPERBÓLICO: y2 x2 cz b2 a2 CILINDRO PARABÓLICO RECTO: x 2 cy CURVAS EN EL ESPACIO F x, y , z 0 C: Gx, y, z 0 La curva C está dada como intersección de dos superficies distintas F y G que contienen más de un punto en común. La curva C es curva plana si todos sus puntos están en un mismo plano. Es una curva alabeada en caso contrario. APLICACIONES DE DIAGONALIZACIÓN POTENCIAS DE UNA MATRIZ A DIAGONALIZABLE (de orden n) A K P.D K .P 1 1K 0 Siendo D K 0 0 2K 0 0 0 nK ROTOTRANSLACIÓN DE CÓNICAS Aplicando el proceso de diagonalización, se identifica una cónica dada mediante su ecuación de 2° grado en dos variables de la forma: 25 Ax 2 Bxy Cy 2 FORMA CUADRATICA Dx Ey TERMINOS LINEALES F 0 TERMINOS INDEPENDIENTES Se debe diagonalizar ortogonalmente la matriz obtenida FORMULA DE LA ROTOTRANSLACIÓN: A B x 2 D E x 0 F x y B y C y 2 x x Sabiendo que P. x y x y P t y y TRANSPONIENDO Y como P es ortogonal: P 1 P t Se reemplaza en la formula del principio y se reemplaza P 1 . A.P D La matriz P tiene que ser ortogonal propia 26