1
INSTITUTTET FOR
SKIBS - Oc7 HIA
Department of Ocean Engineering
Factors Affecting the
STOPPING ABILITY OF SHIPS
by
Sv. Aa. Harvald
June 1975
DANMARKS TEKNISKE HØJSKOLE
The Technical Untversity of Denmark
LYNGBY Danmark
CONTENTS,
Page
O
Summary
3
i
Introduction
3
2
Sthbols and Units
5
3
Definitions
7
4
Manoeuvre Nomogram
10
5
Stopping Procedure
11
6
Mathatical and Physical Models
13
7
Parameters significant for Stopping Manoeuvres
13
8
Calculated Track Reach and Stopping Tïme for
Ships of Différent Types
21
Conclusions
27
10
List.of References
28
il
Appendices i
29
9
6
SUMMARY.
On the basis of the results from
previously
interaction
performed. modè], tests concerning the
between ship and propeller at
extreme
loads, an analysis of the, influence of
ferent parameters were carried
out
propeller
the
with
difregard
/
to the stopping distance öf the ship. In addition
distance
a comparison of the stopping
made between types of ships
has
been
most commonly in use
today
1. INTRODUCTION.
The continuous increase in the size of ships, in the speed and
the
traffic, epecially in certain straits, has caused a current interest in.
investigating the stopping ability of ships.
Today a great deal of literature has already been. published
the subject and full lists of
references
are given
about
in, for instance,
Ref. (1], [5] and' (7].
The periodicals give very often the results from the stopping tests
of new ships.
In this paper some of. the factors being of importance for the stop-
ping qualities of shIps will be discussed.
It
will mainly be a discus-
sion about hydÉodynamic factors because the analysis
is based
results from previously performed model tests with regard
on
the
to the inter-
action between ship and propeller at extreme propeller loads, Ref. [4].
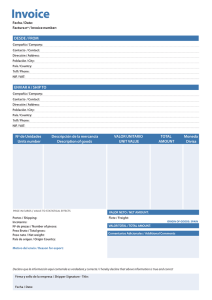
Et will be preferablé to use a manoeuvre nomogram (Fig. 1) when the
stopping abilities of the ship are investigated, because a manoeuvre nomogram gives a good survey of the. interaction between ship,machinery and
propeller.
4
uu
0..
-12
-
MOTOF' SHIP
Q
/
m,I
)
16
' TANT
/SPEED
AHE4D
f
/or
150
.
FUEL CUT
SHIP GOING AHEAD
100
/ ì4..
ELERATll FORCE
F M PROPELLER Mp)
A
4E
50
-
(Mp)
V
SSURE"'
.
ED
SHIP GOIN' ASTERN
/\
-
NN72
100
URN ASTERN
s
FfJ:L ON
ITI
pc,* D:VICE IN ACTION
ZERO SPEED
V
12
-
CONSTANT SPEED
ASTERN
-:
6O
-1
-80
-40
0
40
80
n
1
(REVS./M,N)
Fig. 1.
Sketch of manoeuvre nomogram för ship with diesel engine
going from full ahead to full astern.
In most of the earlier investigations of the hydrodynamic conditions
of the starting, the stopping arid the reversing of the ship it is assumed
that the wake coefficient and the thrust deduction
stant during the manoeuvre.
It
is
coéfficient are con-
also frequently assumed
these investigations that the wake coefficient as well
in some
of
as the thrust de-
duction coefficient are equal to zero.
By using
the manoeuvre nomogram
it is also
automatically
assumed
that the thrust deduction and thè wake vary with the thrust loading coefficient of thé propeller.
2. SYMBOLS AND UNITS.
The symbols have beén chosen in accordance with the "Standard
Symbols", 1972, recOEnmended by the Presentation Committee, ITrC, where
applicable.
General.
= linear acceleration
a
= force
g
= acceleration due to gravity
length along path
s
t)
= time (or
t
= time interval
Ship Dimensions.
L
=
L
= length between perpendiculars
B -
= breadth on waterline
T
= draught
AM
= immersed midship section area
S
= wetted surfàce (L X mean girth)
V
= displacement volume
LCB
= longitudinal position of centre of buoyancy (also used to
length of waterline
= draught aft, TF = draught forward)
(including rudder)
denote the distance of CB abaf t amidships
Prcp Z 1er dimensions.
D = propeller diameter
P
= propeller pitch
A0 = propeller disc area
(rID2
AD = developed blade area
Einem atió and D,'ncjrrz:c Symbols.
V
= speed of model
VA = speed of advance of propeller
R
= RT = total resistance
RR
= residuary resistance
T
= propeller thrust
Q
= propeller torque
n
= rate of revolution
F
= tow-rope pull
(
or
t4/2))
head reach
S5
SL = lateral reach
track reach
ST
= hydrodynuic cOEnponent of ST
S
= machine component of ST
mass density of water
p
= kinematic viscosity of water
Dimensionless Coefficients and ratios.
V
=
= block coefficient
= midship section coefficient
V
1/3
V,
- longitudinal prismatic coefficient
= length-displacement ratio
VA
nD
advance number of propeller
=
K
V
nD
= torque coefficient
pn2D5
R
- resistancè coefficient corresponding to IÇ
pn2Dk
T
L
(also
used as resistance + tow-rope pull coefficient)
= thrust coefficient
pn2D
w=
V_VA
- Taylor wake fraction
WQ = Taylor wake fraction determined from torque identity
WT = Taylor wake fraction detirmined from thrust identity
T_RT
=
T
-
thrust deduction fraction
Metric units are uses throughout, however in the speed-length
ratio
V/IL, V is in knots and
L
is in féet.
3. DEFINITIoNs.
In investigating the ship's stopping qualities some different parameters have been ùsed.
To remove any possibility of a
misunderstanding
thé parameters will be defined in the following.
The
track reach
(fig. 2)
ST
is the distance
travelled
by
center of gravity of the Ship along the stopping track,from the time
the
of
the order to stop wtil the tïÈe.of zero speed (distance to dead-in-thewater).
The
head reach.
is the distance measured in
S
the direction
the ship' s initial course, from the place of the bow at the time of
order to stop to the point most distant of any part of the
of,
the
ship
during
is the distance perpendicular to thé
ship's
the stopping procedure.
The lateral reach SL
initial course line to
the
point
.
of the ship most distant during
manoeuvre.
Omm. "FULL ASTERN"
Fig. 2.
Definition of track reach
and lateral reach
SL.
5T'
head reach
SH
the
8
In the presént investigations only
and SLO.
The effective wake coefficient
is considered, i.e. ST = SE
ST
is determined by the
ship
propeller
acting as a wake meter and integrator, the effective wake velocity being
defined as the difference between the veloc.ty of propulsion (V) and the
velocity (VA)
which
in a homogeneous field would enable the propeller at
torque
the same number of revolutions to create a thrust or to absorb a
equal to that measured
Dividing these two wake velocities by the model
velocity, two coefficients are obtained, referred to as thrust
identity
wake and torque idendity wake respectively.
Thus the wake coefficient is expressed.by:
w-
VVA
VA
V
v('-)
(1)
If the number of revolutions of the propeller is kept at the same value,
the advance numbers
VA
=
nD
can be inserted in equation (1),
D
the diameter of propeller.
(2)
and
nD
n
being the number of revolutions and
Equation (1) then becomes
J' -J
(3)
J'.
Conseqùently the wake can be determined by the use of a propeller. diagram
in which
1Ç
and KQ curves of the prôpeller behind the ship are plotted
and KQ
in addition to the corresponding usual
curves from the open
water experiments.
For the sake of completeness it can be mentioned that .KT
and KQ
are defined by
and
=
K
pn2D5
pn2D'
where T
is the thrust of the propeller, Q
mass density.
The positive direction of
accordance with fig.' 3.
(4
the shaft torque,
p
the
V, n, Q and T was chosen in
RIGHT- HAND. PROPEL LER
Q POS.
-----'-
(ON SHIP)
n POS.
- - + - LOOKING FORWARD
Fig. 3.
Sketch of definition.
V POS.
TPOS. (ON SHIP)
NORMAL
- LEADING EDGE
DRIVING FACE
..n POS.
Q POS. (ON SHIP)
The thrust deduction cae fficient
tT
where K
is determined by
KrKR
(5)
T
is the propeller thrust coefficient and KR
is a coefficient
defined by
R
R
when the model is running freely, and
R+F
R
pn2D
ASTERN
AHEAD
R POS.
- e
F POS.
V POS.
r pos.
Fig 1.
F POS.'
Sketch of definition.
R POS.
lo
under overload conditions.
R
the tow rope
is the ship resistance, F
pull or the force available for acceleration or retardation.
tive direction of
Thus
t
R, T
The posi-
are chosen in accordance with
and. F
can easily be determined by inserting the
fig. 4.
in the
KR curves
propeller diagrams.
LI1
MANOEUVRE NOMOGRAM.
A Manoeuvre nomogram can best be constructed if the results of
complete model test are available.
In this casé it means
test carried out for all four.possible combinations of
and
V
astern.
a
overload
an
sign of
the
n
together with towing tests of the model going both
ahead
and
Corrections to the wake coefficient for the scale
effect
are
best carried out when the results from a complete open water propellér
test are available.
A manoeuvre nomogram can be drawn as shown in the fig. 1.
The
abscissa ïs the number of revolutions and the ordinate is the propeller
torque.
Curves of constant speed have been inserted, as an example,for
maximum speed ahead, stationary, maximum speed astern and
mediate speeds.
The values of
on
F ("tow rope pull") are given
curves for.constant speed, where
F
inter-
some.
the.
indicates the forces available for
acceleration or retardation
T(l-t) = F + R
or
F .T(l-t) - R
(9)
A further curve is inserted corresponding to free running (F = O)..
The time of acceleration or retardation from initial speed V
terminal speed
V2
and the head reach corresponding to it,
10
can be de-
termined by
F = ma = m
dt. = m
dV
m dVds
-= m
dV
(V21
a
t =
(l+k)
dV
(11)
dv
(12)
J VI
ds = m
dv
s
i(l+k)
f':
11
in which
F = force
a = acceleration
= mass
t = time
= displacement (=pV)
s = reach
V = displacement volume'
p = mass density
l+k = f àctor, which takes into
account the hydrodynamic added mass
The factor
l+k = 1,05
has been used everywhere
in this investigation
(see section 7)
The stopping time
TB
and the stopping distance (the head
reach)
Sa are determined by use of the formulae (11) and (12). In the nomogram
correspondïng values of
1/F
and
Vax to
V/F
0.
F
V
and
as functions of
V
can be read
can
be
drawn
and
and
curves
indicating
integrated
from
The stopping time and stopping distance can then be deter-
mïned by graphic or numerical integration.
To the values determined
integration there must be added the time required for the
by
to
machinery
be reversed and the corresponding head distance.
5, STOPPING PROCEDURE,
the
Besides depending on the hydrodynamic conditions of the ship,
stopping time and stopping distance of the ship will depend on the
pulsion machinery as mentioned
above.
differ
Thè reversing characteristiçs of the propulsiPn machinery
with type, make and size.
pro-
For some types only a few seconds will elapse
from the order "full astern" until the machinery goes astern at required
number of revolutiöns. For other. types and under unfavourable conditions
the operation may call for several minutes.
Assuming that the machinery manoeuvre lasts only a short time
ship speed will only change very little.
the
Therefore,in the manoeuvre no-
mogram (see fig. 1) the operation approximately corresponds to the
con-
curve
for
stant speed curve through the point of initial speed on the
free running (F=O).
The curve is followed until intersection the n-axis
(Q=0, the propeller running freely), then to its intersection
Q-axis (the direction of rotation of the propeller changing
with the
from
posi-
tive into negative) and finally on to the maximum negative number of revolutions.
Further stopping öf the ship will then continue
at a nearly
constant number of revolutions but with the propulsion machinery
even less negative torque.
giving
If this procedure is continued,the ship will
stop moving after some time (V=0), whereupon it will start going astern.
12
nega-
For many types of machinery there are limits to the maximum
tive torque and the maximum negative number of revolutions.
It can be suitable to dïvide up the stopping process in two stages:
ist stage: The period from the order "Full astern" to final
the
negative torque or number of revoultions of
machinery.
number
2nd stage: The period from final negative torque or
of revolutions to a speed equal to zero.
The reach corresponding to the ist. stage will, above all,depend on
the characteristic of the machinery and it would be natural to call this
component of the stopping distance, the machine component (S). In
the
manoeuvre nomogram, shown in fig. 5, which corresponds to fig. i, an example has been given showing the influence of the machinery reversal time
of
the pro-
the
reversal
on the relation between the propeller torque and the number
peller revolutions during "braking".
It may be noted that
changing
time can vary within very wide limits without essentially
relation simple.
relation which makes the determination of the
2,0
Q
CONSTANT
SPEEDS.
MNm
AHEAD
cßmis)J
/
45
'Án
mr
DEVICE
IN
a
Fig. 5
flON
-Q5
O
0,5
1,0
1,5fl
(REVS!5)
Sketch of manoeuvre nomogrmn for. ship,
when machinery reversal time is varied.
this
13
in the 2nd stage the stopping distance will, above all, depend on
the hydrodynamic conditions at the ship and propeller and this component
wIll be called the hydrynamic còmponent (S).
which
It will be primarily the hydrodynamic contributions
- are
treated in. the following.
MATHEMATICAL AND PHYSICAL MODELS.
For the investigations into the influence of the various parameters
from previously per-
on the stopping ability of the ships, the results
fòrmed model tests have been used.
The modél tests in question have been
The results have been applied
described in ref. [4].
to
particular
a
as stated in appendix 5.
ship, here marked Ship "U" with the main data
The ship "u" corresponds to a typical middle-sized bulk
carrier.
Most of the other ships in the investigation are hypothetical. ships with
main dimensions determined by statistical way (see appendix 6).
By calculating the stopping time and stopping distance
las (11) an
used
(12) were
diagrams
in connection with
the formu-
especially
constructed for the purpose and to a great extent graphical methods have
been used.
The performance (the mathematical models) are briefly
dis-
cussed in appendices 1, 2 and 3.
PARAMETERS OF IMPORTANCE FOR THE STOPPING MANOEUVREG
From equations (11) and (12) in section 5
(V1
t =
- dv
F
(1+k)
and
s =
I
(l+k)
(V2v
- dv
'v
F
i
and from équation (9) also in section 5
F = TU-t) - R
it can be seen which parameters are of importance for the ship's stopping
ability.
It is obvious that the ship's mass t
plays an
important part.
the full ahead propulsion effect of the ship is reduced so much
propeller turns without producing thrüst, the ship will stop
on account of the hull resistance.
If
that the
exclusively
14
With a rough estimation
O
A2"3, which means that t
tional to
nal with
T
as well as
t
and
R
propor-
is
will be proportio-
ST
of
increase
ST.
(1 + k) is the factor which takes intO
added mass.
and
By doubling the displacement it means an
A1!3
about 25% of
F = -R
gives
account
hydrodynamic
the
This factor certainly varies from ship to ship and from coithe
dition to condition and possible also together with the velocity of
Ship.
that the
is assumed
As these variations are not fully known, it
say
factor is constant, equal 1.05, and it is therefore not possible to
anything
and
about
the
influence
t
Ofl
added màss
of the hydrodynamic
SH.
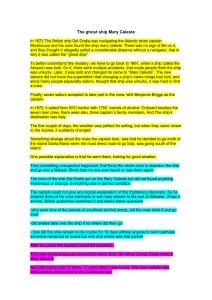
In the diagram fig. 6 coasting with propeller
winilling
near
(T = 0) is shown for different ship types. As mentioned above the effect
of the displacement' appears clearly and further more it appears that the
an
play
ship typé and consequently the ship form and the initial speed
important part in the sequence of events.
From the equations (li) and (12) it appears that the ship' s
veloan
city immediately before thé beginning of the stopping manoeuvre has
influence on the stopping distance and the stopping time. By coasting it
appears that the influence is immediate: when the velocity
If the pro-
the stopping distance and the stopping time becomè greater.
peller is reversing during the "braking, the influence
increasïng,
i'
will
be
very
drastically camouflaged.
This question will be examined in the following.
The force F = T(1-t) - R,
i.e.
the tow force
has to be as great as possible in order to give a.
and stopping distance.
or the
short
braking force,
stopping
time
R- (R negative during backing)
If the resistance
of the ship has a great negative value, the stopping time and the
stop-
ping distance will of course be small.. A large value for F can be obtained going astern by having a large propeller thrust,
The necessary prope11er thrust
velocity V
T
at the
required for propulsion
can be obtained for a single screw ship either by
small quickly rotating propeller or a big
slowly
rotat-ing
using
a
propeller.
15
TANKERS
BULK CARRIERS
15
1o00000"
12
-
12
15
V
V
10
IO
s.,
200O0t
000 t
8
p,P::; I-III
m
30 000
rn/s
5
4
km
5
200000 t
30000
o
-
-
3OminAO
20
10
t
T
o
1000
sec
2000
50
0
3000
ô
CONTAINER SHIPS
o
30lfl40
20
10
toòo
20b0
50
sec
3000
REFRIGERATED CARGO SHIPS
15
12
50000 t
15
12
s
s
V
V
.5
35000
'
t
8
10
10
km
rn,5
rn/s
/
5
4
LA
\\
5
km
l0000t
-s
7000t
V
-----.---
8
-
0000
bOOt
50000 t
30000 I
o
A
0
20
10
30 min 40
2000
sec
o
o
0
t
3000
GENERAL CARGO SHIPS
12
15
2'OOOt
V
s
10
o
50
30 min 40
20
10
15
-
12
s-
s
lSIOtA
8
8
i000t
\Y14
A
km
,-20000t
km
rn,5
15 000 t
4
5
7
o
30 min 40
10
o
moo
Fig. 6.
2000
sec
o
50
0
3000
0
20000 t
-
20
10
30 min 40
0
50
I .................................-.'
g
sec
1000
2000
Coasting with propeller windmilling and
rotating without producing any thrust.
3000
16
An investigation was carried out to find out
of the propeller
on the stopping
the influence of the size
time and the stopping
ship "u". (dates for. ship "U", see appendix 6).
distance
for
eqLp-
The ship "U" was
ped with one of the following 16 propellers:
The propeller diameters D = 5, 6, 7 and 6 ni
ratio P/P
0,4, 0,8, 1,2 and 1,6.
ccnbined with the
pitch
It was assumed that the generalized
35000
PD
SHIPU'
30000
5m
D 6m
V = 1.5 knots
hp
7m
'8m
,'D,
PI
25000
,, ,
20000
..4br
15000
10000
5000
4
)
-
10
Fig. 7.
20
1 REVSk- 40
Necessary power for shi
"U"
equipped, with different própeiiers.
n
Si
17
characteristics of these propellers were the same
strörn
(61.
By generalized propeller characteristics
that the characteristics cover all
combinations
stated
as
by Nord-
meant here
it is
of speed
and revolu-
tions both positive and negative.
The calculations werè carried out on condition that the machinery
was always able to deliver sufficient power to move the ship "U" with a
velocity of 1.6.5 knots.
Furthermore it was assumed that the machinery
might be reversed instantaneously and be able to deliver
negative
a
Going astern the
turning mcgnent numerically equal to the ahead moment.
moment and the maximum number of revOlutions could not
maxim
ceeded.
be ex-
The calculation procedure is discussed in appendix 2 and 3.
The necessary power for the ship "U" is shown in fig. 7 as a function of the propeller number of revolutions.
As will be seen, there is
a very great variation in the requirement power.
The result of the calculation is indicated in table 1.
It appears
from
the
table that the
than
the
shortest time and the longest stopping distance is about 27%
longest stopping time is about
greater than the shortest distance.
The larger propeller
24%
diameter the
5
6
7
8
549
510
485
461
2047
1934
1875
1742
469
471
469
449
1764
1757
1747
1688
471
468
463
442
1741
1715
1682
161].
498
480
477
1827
1765
1735
D
P/D\
t (sec)
0,4
S (m)
t (sec)
0,8
S Cm)
t (sec)
1,2
S (m)
t (sec)
465
-
1,6
S (m)
Table 1. Stopping time
t
and track reach
1695
S
for ship "U" equipped with different
propellers (16,5 knots).
(
greater
S)
18
shorter stopping time and stopping distance.
Futthermore
it
noted
is
that the propeller with the smallest pitch ratio is the poorest in stopratios
ping' the ship and that the propellers with the large pitch
also poor.
The conclusion is:
of
The optinnun propellers for the propulsion
aleo
are
the ship will
of
be the most suitable for the stopping
the ship.
The picture. is quite different during coasting wïth
windmilling (Q = 0).
prqpeller
the
For the same ship "U" equipped with the same 16
propellers the time and the run distance were determined when
city of the ship was changed from 20 knots to 4 knots.
At
the velo-
greater
the
pitch ratios the propeller diameter had only a small influence while the
change of the diameter from 5 ni to 8 m. caused a reduction
distancel of about 10%.
in
time
and
At a propeller diameter of 8 rn the change of the
pitch ratio from 1.6 to 0.4 showed that the time and
stópping
the
stance would be reduced with about 11% and 14% respectively.
The
dicon-.
clusion is then as expected:
When coasting with propeller windmilling the propeller with
the largest possible dicvneter cowl the least possible pitch
will be mo8t suitable for stopping the ship.
¡t will be seen from Fig. i that the force
has the greatest né-
F
gative value at.the greatest possible number of revolutions
During the stopping manoeuvre it is important
to
torque.
or
the greatest
obtain
possible numbers of revolutions or torque as soon as possible.
more it turns ot fr Fig.5
Farther-
as mentioned before, that the relation b-
tween the torque and the number of revolutions is only
to
Some
exteflt
dependent on the, reversing time of the machinery. On the other hand this
relation will, to a great extent be dependent on the
Fig. 8 shows the relation between torque and rate of
chosen
propeller.
revolution
the operation, "full ahead" to "full astern" for ship "U"
.durin
equipped
with
different propellers.
The longer time the operation "full ahead - full astern"
lasts the
longer will be the loss in velocity of course, but generally it will not
be' advantageous to spend much time on this operation as the
reach naturally increases.
total track
19
150
Q
".
"FULL AHEAD"
Mp m
100
:0,8u
D
=8m
7
50
6
5m
o
50
loo
"FULL ASTERN'
-150
-200
-100
Fig. 8.
o
RPM
n
00
Relation between torque and number of revolutions
per minute during the óperat ion "full ahead" to
"full astern" for ship "U" equipped with different
propellers.
The term "full astern" may be interpreted in severa.], ways.
In the
present investigation it was assumed that the engine when going
astern
could produce a torque equal to that going ahead and that the
rate
of
revolutions can be. the same in both directions.
This is not the case with many types of engines.
The
availablé
power with machinery going astern will be only a percentage of the fOrward full power.
This influence will be studied in more detail.
stoppïng time and stopping distance for ship "U" have
1ers.
determined
been
after having been equipped with one of the above-mentioned
16
The effect of the ship going ahead with avelocity. of
has been determined and the corresponding torque
Q
on
the
The
pröpel16 knots
propeller
has been used as the starting point. The stopping time and the stopping
distance has been determined when the torque -Q, -2/3 Q and -1/3 Q was
available when the stopping manoeuvre was started partly with the velocity of 16 knots and partly with an imagined velocity of 2OE knots
The
20
calculations were perfàrmed under the condition that.
and t = 0,20,
and w = 0,20
and
t = 0,10
w = 0,40
réspectively.
Ftzrtheinore
it was assumed that the machinery was arranged in such a way that either
the torque or the number of revolutions were constant during the
ping manoeuvre.
The procedure has been adapted as mentioned
dix 2 and 3 respectively.
In accordance with the above-mentioned calculatiOns
of Q to 2/3 Q
and
1/3 Q
stop-
in appen-
the reduction
results in the following:
When the torque is constant during the stopping,a reduction of the
propeller torque from Q to 2/3 Q will get the result that the
stopping ti.me will be izcreased wïth about
35% and that the stop-)
ping distance will be increased with about 30%.
It is nearly
same whether the ship is equipped with a large or a
the
small propel-
1er or with a propeller with a large or small rate of revolutions.
When the torque is constant during stopping,
propeller torque from Q
to
a
1/3 Q will mean
reduction
that
the
time will be increased with about 110% and that thé
of the
stopping
stopping
di-
stance will be increased with about 85%.
Just like 1) the type of propeller has a very little influence
on
these relations.
When the number of revolutions is constant during stopping, a
re-
duction of the maximum available trque from
the
Q
to
2/3 Q has
effect that the stopping time will be increased with 40%
(the average value in this investigation was 67%)
and
stopping distance will be increased with 25% to 80%
value in this invéstigation was 45%).
to
120%
the
that
(the
average
The srna1let propellers will have the minimum increases, while the
8 rn-propellers with a pitch rtio 0,4 will have the greatest.
Keeping the number of revolutions constant
uxing the stopping,
reductioh of the available maximum torque from
Q
to
1/3 Q
a
will
mean:
that the stopping time will be increased 3 tò 4 times (the average
value in this investigation was 3.59),
that the stopping distance will be increased 2 to 3 times.
average value in this investigation was 2.63).
(the
21
8. CALCULATED TRACK REACH AND ST9PPING TIME
FOR SÑIPs OF DIFFERENT TYPES.
For a number of ship models and ship sizes the track reach and the
stopping time have been determined under the condition that
whole
the
engine power is available during the stopping manoeuvre.. However, there
must be the limitation that neither the torque
Q nor the number
revolutions
n
propulsion.
In appendix 6 the main dimensions and several
numerically must exceed the existing values
been given for the ships used in the investigation.
of
for normal
data
The method
have
of thé
calculation is explained in appendix 2 and 3. Also here the change from
full ahead to full astern is assumed to take place instantaneously. The
sequence of the stopping manoeuvre, is illustrated, in the figures
9-14.
The abscIssa is here the time and the ordinate is partly
the
and partly the distance run.
the föllow-ing
The stopping manoeuvre for
velocity
types of ships are illustrated:
fig.
9
-fig. 10
Tankers
Bulk.Carriers
fig. 11
Container
fig. 12
Refrigerated Cargo Ships
f i. 13
Cargo Liners
fig. 14
General Cargo Liners
Ships
In most of the calculated examples it has been
ships have only a single screw for propulsion.
assumed
In the
screw ships this has been indicated cn the figure.
case
that
of
the
twin
The dotted line in-
dicates that this curve has not been completély calculated.
It will be noted that the stopping time and the track reach
vary
very much from ship to ship and with the initial velocity. On the other
hand the relative sequence of the stopping manoeuvre are
the same fOr all the models.
on
the whole
22
TANKERS
15
V:1kflotS
V
(7,ri%)
//
-
'
"
t (2 prop.
'.000
t0
t
t (2p,tp.)
S
(823m,4)
500 ''' t (2 prop.)
410
4
3000001 2prop.)
km
rn/s
1000'''
knots
5"000tC2propJ SV
A
km
rn,9
5
o
t
1000 sec 1500
o
is
:18 knots
r
(D9,9m)
2' :. :':.1t (D
300''OU2pro'
lOO'' t(D8.Im)
f
\\,. ,
e
V5-=2. knots
(j, .n))
4
t(0'(0.3e)
5
2
OD
t
1500
S
A
200000t(D.9.Im)
km
mf5
2
iûoösec
t
410
0,7)
l00000('rB.9rn)
o
1500
15
SV
A
10
Io
6
500''' t
'1000000 t .2prop)
(26'%)
V
1000 sec
2000
2060
0Ç012O0c
t
1000 sec
"O
1500
t
2000
Stopping diagrams for tankers.
Fig. 9.
BULK CARRIERS
3
15
= 14
(yomh)
V
3
15
SV
knots
V51knots
(
S
23"v)
A
.50000t
io
210
A
--
km
30000 t
400 sec
o
km
m
1
o
2
50,''t
00
t
o
800
5
o
200
0
400
sec 600
15
e
3
V5 = 18
\.20knots
.Ffl)
knots
(26"}t)
V
(0)
A
lo
50000 t(7,m)
50000 t (Z2m)
:.
o
o
\
'tFi
---c°r
-
\
S
(1'
2
S
km
A
50''t
30000 t
000 t
200
400
Fig. 10.
sec
600
200
400 sec
600
Stoppingdiagrazns for bulk carriers.
23
CONTAINER SHIPS
3
15
SV \S=?
!4:25 knots
86'%)
(
3
15
10
5goot
35
210
2
'°
0Pî(t2.. :
km
t (2 prop.
5
km
5
1
35OOO
200 sec
100
t
300
0
400
200 sec
100
-400
t
300
3
15
s
knots
V
2
10
km
"Vs
I
5
S. -
35000(It2..-.)
200 Sec
100
o
prop.
Fig. 11.
t
300
400
Stopping diagrams for container ships.
REFRIGERATED CARGO SHIPS
15
V
V5o8knots
9.26m,4)
V
,Jr .0
JlL
10
lSOsec 200
50
o
V5: 22 knot-
Oknots
Vs
S
(1429m,4)
l0
A
l0000t
7000 t
5
45
A'
biri00(t
o
25
50
lSOsec 200
100
t
250
'.5
15
1.5
4knots
S
(I1$2Tt))
V
1.5
S
(12.35"W
V
0
A
"I.-
t0000t
S
70..
45
-
Fig. 12.
too
l5Osec 200
km
A
'Vs
5
50
1.0
km
t
250
s
5
0
50
t0000i
boot
100
ISO sec 200
t.
250
Stopping- diagrams for refrigerated cargo ships.
24
CARGO LINERS
15
IS
1.5
Vs=leknots
V
SV
A
C26m/s)
Vs: (9m/)
'knots
15000t
.
s
km
m,
VTV5
455
5
15000 L.
10
1,0
s
S
L
V
200 séc 300t.
A.
200 Sec
00
'O.
t
300
1.5
15
4:22 knots
V
S
tm/i)
(1
V
L
Vs:
knots
S
(125'%)
L
200001
20000 t
10
%010
1,0
km
km
5
5
00Cc
200sec
100
Fig. 13.
"
o
t
300
OES
i00
2000Cc
200 sec
I00
O
o
t
300
¿.00
Stopping diagranis for cargo 1inèrs.
GENERAL CARGO SHIPS
5
15
Vs: ßknofs
\/Ííri
9.26'%)
V
Io
5
V
1,0
200001
10000 t
t
45
5
00
2
2 knots
11,32 ')
so
ioo
ISO sec
oo
t
S
AÌ.
116m)
0001m;
1,0
km
0000 tI
50
lOO
Fig. 114.
km
-10000 t
LS
1,5
V
IO
10
rTy5
15
V
s
lO,29"/i)
20000 t
150 sec 200
o
o
A
1.5
VS :"Oknots
.ISOsec 200
t
250
Stopping diagrams for general cargo ships.
25b
25
On the basis of this màterial, the following averages
have'
been
have
been
found:
Torque
Variation
of velocity
Distance run
.0
]_00
o
20
70
40
40
50
65
60
30
85
80
15
95
100
0
100
It will be noted that the characteristics.of thé machinery
ignored.
On the baSis of the above-mentioned table
or
the
figures
9-14 and with knowledge 6f the òharacteristics of the machinery
easy to design curves which give the väriation of velocity and th
it is
di-
stance run during the stopping man9euvre.
in the diagram fig. 15 the values of the' track reach (S)
the various ships fr
fig. 9-14 are
ut together with
the
S. As mentioned in setiôn 5 this is that part of the
for
distances
track
reach
which depends on the characterIstic of the machinery.
The total track reach is thus determined by
ST
S
+ SHY
Asan example, a tanker with a displacement Of 300.000 tons,with a velocity of 8 rn/s and with the'machinery reversed at 125 s, is
expected
to have a track reach of about
ST = l000 + 3700 = 4700 m
In the construction of the diagram it has been. assumed
necessary effect for propulsion can vary with
±10%.
This
that. the
scattering
in the effect results in a scattering of the SHY_values. This is shown
by the hatched Spaces on the diagram fig. 15.
A special calculation of the stopping distances and the
times has not been carried out for ships running in ballast.
stopping
A rough
esimate can be carried out in the following manner: With the available
'-I.
P
'D
(j]
(D
cl-
(D
(D
I-i)
F-i.
e
o
o
M
lo
5
REFRIG.
BULK CARRI
5000
SHY
/p
15
CARII
1000.1
IP
I'
p
2'O
10
l0O C 00 t
300000t (2P)
5000001 C2P)
2'S
1000000 t (2P)
TANKERS
20 001
3'O
15
si
V
3
TIME
KNOTS
rn,5 20
S mil
Amin
3 man
REV1RSAi"'.
60 s
30s
SHIPS
50000 t
35000 t
MACHI NEL 2 min
CONiAI NE
)
27
engine power the
ty
y m/s.
ship
SHY
with the displacement x t
will obtain the veloci-
can be read in the diagram at the velocity
ship ôf the same type in question but with a displacement of
can be read at the velocity
y, using the same curve
for
y
x t.
Also
as for a full
loaded ship.
9, CoNcLusioNs,
The type of ship, dimensions, mass and velocity are the parameters
of greatest importance for the track reach and the
of the ship.
The type of the ship has the importance that
the
stopping
effect
propulsïon machinery of the ship is thus determined.
time
of
Hereby
the
also
the available effect for stopping is determined.
When the parameters mentioned in a. together with the velocity and
the machinery of the ship are determined, other factors
have only
a secondary influence on the stopping qualities of the ship.
If shorter stopping times and track reach than usual
the ship may be equipped with a special mechanism,
are
for
wanted,
instance
parachutes or extra propellers.
If the propeller is optimum for Ithe propulsion of the
ship,it will
generally be nearly optimum for the stopping of the ship.
If a short stopping time and track reach are wanted, it is
sary to have as far as possible the maximum available
neces-
efféct
du-
ring reversing.
The mode of operation of the regulator put on the propulsion
chinery has an influence on the stopping manoeuvre.
Thus
mathere
will be a difference on the track reach and the stopping time,
the number of revolutions or the torque are
on
a
if
constant level
during the last phase of the manoeuvre.
In the speçification of the propulsion machinery of
ships
it
is
necessary to estimate the time for the reversing of themachinery,
for instance as a function of the nthnber of revolutions
- torque.
a
and
the
28
10, Lisi
OF REFERENCES,
[i] Clarke, D. and Weilman, F.: "Thé Stoppïng of' Large Tankers and
the
Feasibility of Using Auxiliary Braking Devices" ,Transaction
of the Royal Institution of Naval Arthitects,
London 1971,
p. 139.
(2] Guidhammer, H.E. and Harvald, 5v. Aa.: "Ship Resistance,
Effect of
Form and Principal Dimensions",. Akademisk Forla,Copenhagen
1974.
Harvald, SV. Aa.: "Wake of Merchant Ships", The
Danish
Technical
Press, Copenhagen 1950.
Rarvald, Sv. Aa.: "Wake and Thrust Deduct.ión at Extreme
Loadings", Publications of - the Swedish
Experimental Tank, nr. 61,
State
Propeller
Shipbuilding
Gòteborg 1967.
The M9 Panel of the Ships Machinery Committee: "Guide to the Selection of Backing Power"
Technical and Research Bulletin No.
3-5,The Society of Naval Architects and
Marine Eigineers,
New York 1957.
Nordstrom, H. F.: "Screw Propeller Characteristics",
Meddelanden
frân Statens Skeppsprovningsanstalt, Nr. 9, 1948.
(7] Norrby, Ralph
A.:
"A Study of Crash Stop Test with
Ships", Chalmers University of Technology,
Single
Screw
Göteborg 1972.
29
11. APPENDICESI
APPENDiX 1
Calculating Procedure for Stopping Manoeuvre, Stage 1.
Calculation of reach and loss of velocity during the time
sary to change the number of revolutions from that
neces-
corresponding
to
"full ahead" to that corresponding to "full astern" has been performed
as follows:
Principal data: Ship (dimensions, form and mass (m)).
Propeller (diameter (D) and pitch ratio (P/D)).
Ship's speed, sailing freely (V0).
Number of revolutions of machinery (n).
Change of number of revolutions (an) per unit
f time (frr).
Diagrams giving ship resistance, propeller thrust
and
torque as function Of diameter,speed and number of revolutions, wake and thrust deduction coefficients (for
instance from "Wake of Merchant Ships" [3].
Figs. 52,
58, 104 and 111 and from "Wake and Thrust Deduction at
Extreme Propeller Loadings" [4]).
CalcüJ.at Ing procedure:
o
Sailing freely,
V = V0.
TT =0
o
R0
V0 A diagram R = R(V)
R
V0 A T0 A diagram T = T(V,n)
A n.
A
diagram Q
Q(V,n)
T
no
Q0
1-t0
30
t=t =t
Initial calculation.
i
=
+ frr
o
o
O
=n -n
o
AVA
n1
diagram T = T (V,n)
F' = T'
1
(1-t )
1.
F
F
R
0
1
T;
=
½
frr
½
o
in
i
= V + V
o
V
A
diagram
AV
n
i
R = R(V)
R
diagram T = T(V,n)
A
T
i
FI = T i
VA
Q
1.
t i +tt
2
= n
n
-R
A diagram Q = Q(V,n)
n
1
TT
-t I)
2
1
AVA
n
2
diagram T = T(V,n)
T'
2
1
Fri here analogous with E!
T = T
= T
p
+
(p-1)frr
or
t
1
p-1
+ At
=n
p-1
p
AV
A diagram T = T(V,n)
p-1
p
pp-I
(l-t ) - R
F'p = T'p
p½ Ar
F
m
p
Vp =V
p-1
T'
+Vp
;
F
p-¼
= ½(Fp-1 + F')
p
31
V
¿s. diagràm R = R(V)
= T
VA
(l-t )
p
n
R
- R
p
A diagram Q = Q,.(v,n)
Q
The procedure is.continued until the maximum negative number of restopped
volutions, or the maximum negatïve manent is reached, or may be
np = O
even at
if wanted.
The manent Q may now be mapped as a function of
V
The speeds
n
(see. Fig. 5) .
F may be indicated on the curve.
and the forces
phical integration of eq. (12).
ratio
as a function of
V/F
gra-
of
If the reaches are wanted they may be determined by means
This is done by drawing a curve
of the
V.
APPENDIX 2
The Calculating Procedure, Stoppi.ng Manoeuvre Stage2.
constantly negative value, n variable (free).
A regulator being attached to
the machinery provides
that
torque is kept constant.. The calculation of the loss of velocity,
reach and the elapsed time at constantly negative torque
Q
the
the
(reversing
engine) takes place in the following way:
T = tq
Vq (principal data, see also appendix 1)
VqAQAdira1n Q=Q(Vfl)'flq
Vq A ng A diagram T = T(V,n)
diagram R = R(V)
V
A
F
= T (1-t ) - R
q
q
q
q
q
T
R
q
This procedure is executed for the points, in diagram
Q =
which has the chosen Q and which is placed on the. curves corresponding
to a round number of V.
32
The procedure gives F-values for different values of
V. The curves
for 1/F and V/F can be drawn, and the. stopping tizne and thé stopping di-
stance can be determined from the formulae (11) and (12)
by making
a
graphic integration and using a planimeter.
APPENDIX 3,
The Calculating Procedure of stage 2 of the Stopping
Manoeuvre, n constantly negative value.
regulator beig attached
A
to thé
number of revolutions is kept constant.
machinery
The calculation of the
velocity, the reach and the elapsed time at cnstantly
of 'revolutions
V = Vr
A
loss of
negative,
number
n '(reversing engine) takes piace in the following way:
T =
Vr A n
provides that the
(principal data, see also appendix 1)
diagram Q = Q(V,n)
V
A
n A diagram T = T(V,n)
Vr
A
diagram R = R(V)
Rr
F = T (l-t ) - R
.r
r
r
r
This procedure is executed for the
which has the. chosen n
to the
constant
V
points in diagram Q
Q(V,n),
and which is placed on the curves corresponding
values.
The procedure gives F-values for different values of V. The curves
for 1/F and V/F can be drawn,and the stopping time and the stopping distance can be determined by the formulae (il) and (12) by the use of
planimeter and graphical integration.
a
33
APPENDIX 4.
The Calculating Procedure of the Stopping Qualities
when Coasting with Propeller Windmilling.
The calculation of the loss of velocity, the run distance and the
elapsed time when coasting with the propeller wthdmil1ing and rotating
wIthout producing thrust has been made in the following way:
For a number of characteristic ships (see appendix
6)
the curves
of resistance have been determined by use of "Ship Resistaric&' ,ref. [2).
With regard to other assumptions for the calculatIons, see appendix 1.
R=f(V)
R
F
When F
has been calculated for a suitable nthnber of yalues of V, the
curves för 1/F and V/F can be drawn.
Rñn distances and loss of velocity can be determined
by
use
of
the formulae (li) and (12) in section 3, and the integràtions
can
be
made graphically and by use of a planimeter.
APPENDIX 5.
In the investigations on the influeÏce of
the vaious parameters
on the stopping ability of the ships the results from earlier perfórmed
model tests have b'een used (ref. [4]). The -results have been transferréd
to a ship marked Ship "U", wIth the following main data:
210m
205m
L
=
B
=30,5m
=l1,5m
pp
T
L/V
=
58.000 rn3
=
5,42
(
= 59.450 t)
=0,807
6
pp.
L/B
=
6,89
B/T
=
2,65
LCB/L
=
-0,Ö20
6
= Ö,787
= 0,997
tp
= 0,786
34
APPEÑD'IX 6.
The
main dimensions
and
various data
for the ships, the model
family, used in the investigation are as föllows:
Type
Displacement
t
Tanker
Bulk Carrier
Container
Ship
Refrigerated
Cargo Ship
Cargo Liner
General
Cargo Ship
LX B
X
T
mx
6
V
-
rn/s
service
Knots
1.000.000
400 )c 96 X 31
0,820
8,23
16
500. 000
315 X 77 X 25
0,804
8,23
16
300.000
265 X 65 X 21
0,809
8,23
16
55 X 19
0,795
8,23
16
4l
0,796
8,23
16
X
200. 000
235
100.000
230 X
X 13
50. 000
180 X 33 X 10,5
0,782
8,23
16
30.000
140 X 27
X
10
0,774
8,23
16
200. 000
235 X 55
X 19
0,795
7,72
15
100.000
230x41x13
0,796
7,72
15
0,782
7,72
15
27 X 10
0,774
7,72
15
X
0,556
15,43
30
X
50.000
180 X 33
30.000
140
50.000
255 X 32
35.000
228 X 29 X 9,6
0,538
15,43
30
10.000
130 X].8,7X 7,5
0,535
11,83
23
7.000
115 X16,7x 6,7
0,531
11,83
23
22. 000
163 X 22 X 9
0,665
11,32
22
15.000
147 X 21 X 8,2
0,578.
ll32
22
20.000
135 X 22 X 9
0,730
10,29
20
10.000
109 x17,5x 7
0,731
1Ö,2.
20
X
10,5
10,75