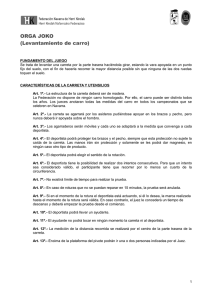
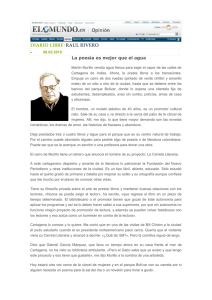
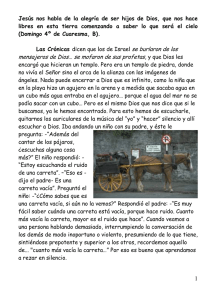
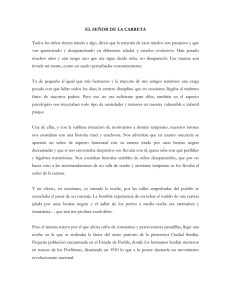
UNIVERSIDAD TECNOLÓGICA DE PEREIRA PROGRAMA DE INGENIERÍA ELÉCTRICA RELEVACIÓN INDUSTRIAL – Taller El sistema de la figura realiza el cargado de la carreta principal CP mediante una mezcla de cemento y agua. La carreta 1, CA, inicia en A y se desplaza a derecha, Cad, hasta B donde espera para ser cargada con cemento desde la tolva TC, luego va hasta C donde activa el pistón de efecto simple Pa para vaciar su contenido y luego regresar a izquierda con Cai. La carreta 2, CB, inicia en D y se desplaza a derecha con Cbd hasta el sensor E donde espera a ser cargada con agua desde la tolva TA, luego va hasta F donde recibe el contenido de cemento desde la carreta CA y enciende un mezclador M mientras regresa a izquierda hasta E donde activa el pistón Pb para vaciar su contenido en la carreta principal y apaga el mezclador al final de la descarga. Los pistones Pta, Ptc, Pa y Pb son todos de efecto simple, lo cual quiere decir que en estado desenergizado cierran la compuerta y energizados la abren. Los sensores B y E son magnéticos y detectan a las carretas justo cuando están sobre ellos. Los sensores A, C, D y F son finales de carrera normales. El llenado de cemento en la carreta CA dura 10 sg, lo mismo tarda vaciar CA cuando llega a C. El llenado de agua en la carreta CB dura 6sg. La carreta CA debe esperar en C hasta que llegue la carreta CB a F para poder vaciar su contenido. El vaciado de la carreta CB a la carreta principal dura 13sg. El proceso de llenado de la carreta principal requiere de TRES ciclos completos de mezcla de cemento y agua como se describieron arriba. Además para agilizar el procedimiento, las carretas CA y CB no deben regresar al origen (A y D) hasta que no esté completamente llena la carreta principal. Finalmente CA y CB regresan al origen. Todo el sistema inicia con la orden de arranque AR y garantizando que las carretas se encuentren en el origen. Se pide diseñar este sistema con una sola red de Grafcet, empleado contadores que permitan reutilizar parte del código para el proceso que es repetitivo. NO USAR FORZADO DE GRAFCET. El Grafcet mostrado controla el proceso indicado. El proceso inicia con un pulsador A, se llena el tanque con un fluido R1 hasta el nivel L1, Luego se activa un mezclador y se llena el tanque con un fluido R2 hasta el nivel L2. Finalmente se abre V3 hasta que el nivel descienda a L0 y se reinicia el proceso. Observe que el mezclador solo está activo mientras se vierte el fluido R2. Se pide: A) Emplear la metodología generalizada para pasar el grafcet mostrado a ladder. B) Empleando forzado de grafcet, adicione una segunda red que controle un paro de proceso, PP, así: Cuando se presione un biestable PP, y si es que no se estaba vaciando el tanque, se debe garantizar terminar de llenar el tanque con el fluido R2 y dejar permanentemente encendido el mezclador. Si el tanque se estaba vaciando se debe dejar terminar de vaciar. Solo hasta cuando se libere PP el proceso puede continuar en el punto adecuado. PP es un biestable, es decir, cuando se presiona cambia de estado y permanece así hasta que se vuelva a presionar. Este paro se emplea normalmente en las máquinas como un sistema que permite un descanso para el personal (ejemplo: salir a almorzar) y retomar las labores luego. Diseñar un Grafcet para el control del siguiente proceso. Se tiene un tanque de aguas lluvias, el cual puede a su vez llenar dos tanques mediante las válvulas V1 y V2. El llenado de cada uno de estos dos tanques no debe sobrepasar su nivel máximo indicado por A1 y A2 respectivamente. Una vez lleno cada tanque se debe iniciar su vaciado mediante las válvulas V3 y V4 hasta descender a los niveles B1 y B2. El proceso de llenado se inicia cada vez con el tanque 1 y solo cuando ambos tanques estén vacíos. El llenado del tanque dos se inicia justo cuando se llena el tanque uno. Diseñar un Grafcet para el control del siguiente proceso. Se tiene un sistema de carga el cual consta de un depósito de material que llena a un carro móvil. El carro móvil inicia en el centro donde se encuentra un sensor SC el cual solo se activa cuando el carro se posa completamente en el. Dando arranque con el pulsador “A” el sistema carga el carro accionando la compuerta OC durante 10s, el carro se desplaza entonces hacia la derecha hasta SD donde debe permanecer por 15s (tiempo que toma descargar manualmente el carro), este proceso se repite tres veces y el carro debe finalizar en el centro. Luego ante una nueva orden de arranque se carga durante los mismos 10s pero el desplazamiento es a la izquierda hasta SI donde debe esperar 15s, este proceso se repite cuatro veces. Use contadores para controlar las repeticiones en los desplazamientos y garantice que todo el proceso descrito pueda repetirse indefinidamente. Automatizar un cruce peatonal como el mostrado a continuación. Se cuenta con un semáforo vehicular y dos peatonales (que actúan como uno solo), además de 2 pulsadores (que actúan como uno solo) para solicitud de cruce por parte de peatones. Cuando un peatón pulsa P, el semáforo vehicular pasa a amarillo por 3s y luego a rojo por 16s. El semáforo peatonal pasa a verde en el mismo instante que el vehicular pasa a rojo, y dura en verde por 10s. Luego de terminado el ciclo, el semáforo vehicular debe permanecer en verde como mínimo 10s, esto con el fin de evitar que con cada pulsación de un peatón el cruce no permita el paso de vehículos. Se debe diseñar mínimo dos grafcets, uno para el semáforo vehicular y otro para los peatonales. La sincronización entre ambos grafcets se debe realizar mediante acciones de forzado. NOTA: Si considera que falta información asúmala, pero siempre garantice los enunciados planteados.