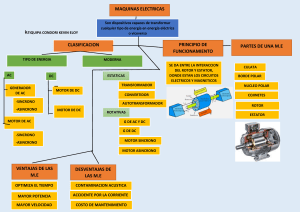
Departamento de Tecnología. IES $OPXGH\QH RESUMEN TEMA 11: MÁQUINAS ELÉCTRICAS. MOTORES DE CORRIENTE CONTINUA 1.- Clasificación de las máquinas eléctricas Se denomina máquina eléctrica a todo dispositivo capaz de generar, transformar o aprovechar la energía eléctrica. Según esto podemos clasificar las máquinas eléctricas en tres grandes grupos. Generadores, transformadores y motores. Generadores: son máquinas eléctricas capaces de generar energía eléctrica a partir de energía mecánica. Los generadores de corriente continua, son las dinamos. Los generadores de corriente alterna, son los alternadores y se encuentran en las centrales eléctricas. Transformadores: son máquinas eléctricas que transforman la corriente eléctrica que reciben en corriente eléctrica de diferentes características (voltaje, intensidad). Motores: son máquinas eléctricas que aprovechan la energía eléctrica que reciben y la transforman en energía mecánica. Se clasifican según la corriente de funcionamiento en: Motores de corriente continua Motores de corriente alterna: monofásicos y trifásicos Motores universales: funcionan con cualquier tipo de corriente (CC ó CA). 2.- Fundamentos magnéticos y eléctricos: Electroimán: un núcleo de hierro o acero puede adquirir propiedades magnéticas (imantarse) cuando lo rodeamos por una bobina por la que hacemos circular una corriente eléctrica. Se crea un campo magnético. Fuerza electromagnética: cualquier conductor recorrido por una corriente y bajo la acción de un campo magnético, se ve sometido a una fuerza electromagnética que es perpendicular al campo magnético y a la corriente que circula por él. El motor (rotor) lleva varios conductores repartidos circularmente por su periferia. La fuerza electromagnética será capaz de desarrollar un par motor o momento de giro, y hacer girar un eje. Fuerza electromotriz: cuando un conductor se mueve en un campo magnético cortando las líneas de fuerza del campo, se genera una diferencia de potencial o tensión en sus extremos, es decir, se crea una fuerza electromotriz inducida E (fem). En los motores esta fem que se produce, se opone a la causa que la genera y por eso se le llama fuerza contraelectromotriz E´. Esta fuerza es la diferencia de potencial que tiene lugar en el inducido del motor (rotor). Será la que nos proporcione la potencia útil. Potencia: La potencia absorbida será: La potencia útil será: Pab= U.I Pu = E´.I = C. n 3.- Constitución y clasificación de los motores Desde el punto de vista mecánico: Estator: parte fija Rotor: parte giratoria Entrehierro: espacio de aire entre el estator y el rotor. Son electroimanes: núcleos arrollados por devanados o bobinados 1 Departamento de Tecnología ,(6$OPXGH\QH Desde el punto de vista electromagnético: Dos circuitos magnéticos (inductor e inducido) Dos circuitos eléctricos (inductor e inducido) Desde el punto de vista del funcionamiento: Arranque: puesta en marcha Aceleración: espacio entre la puesta en marcha y hasta alcanzar la velocidad de funcionamiento. Marcha en régimen: velocidad de funcionamiento o nominal. 4.- Motores de cc Su constitución y funcionamiento se basa en la creación de una fuerza electromagnética F y una fuerza electromotriz E´. Están compuestos por un inductor y un inducido, alojados en el estator y rotor, respectivamente.¨ . Inductor: (o excitado), su misión es crear el campo magnético y se encuentra alojado en el estator. Está formado por unas bobinas (hilo de cobre) alrededor de los polos de un electroimán. Los polos van sujetos a la carcasa. También puede estar constituido por imanes permanentes. El número de bobinas depende del tipo de motor Inducido: alojado en el rotor. Consta de unas bobinas que van arrolladas sobre las ranuras de un núcleo de hierro. Los extremos de las bobinas se sueldan a una serie de láminas de cobre, llamadas delgas, que forman el colector. El conjunto se monta sobre un eje. Además el motor dispone de escobillas (tacos de grafito), montadas sobre portaescobillas. Estos dispositivos están en contacto permanente con el colector y suministran la corriente eléctrica a las bobinas inducidas. FUNCIONAMIENTO Vamos a tomar como ejemplo un motor de corriente continua, con el inductor y el inducido en serie. Entrehierr o Eje Escobillas Polo I N I Bobina inductora S I I Colector Inducido 2 C C Departamento de Tecnología. IES Almude\QH Al conectar el motor a la fuente de alimentación, la corriente eléctrica circula por las bobinas inductoras generando un electroimán y un campo magnético. Esta corriente también circula por las bobinas inducidas a través de las escobillas y colector, generando también un electroimán y un campo magnético. La interacción de los campos magnéticos provoca fuerzas que actúan sobre las bobinas inducidas, las obligan a girar y con ellas girará todo el rotor. Aparece una intensidad de corriente en el Aplicamos una inducido Ii tensión U Aparece un par motor Mi que hace que el motor se ponga a girar Se crea un campo magnético Aparece una fuerza contraelectromotriz E´ La intensidad de corriente disminuye y se alcanza el equilibrio Representación esquemática: Ii Fórmulas Inducido M U Ri Aplicando la ley de Ohm: E´ U – E´ = RT. I Rex U – E´ = (Ri + Rex ). Ii Inductor o excitado U = tensión en bornes del motor (V) E´ = fuerza contraelectromotriz (V) Ri = resistencia del inducido (Ω) Rex = resistencia del inductor (Ω) Ii = intensidad (A) TIPOS DE MOTORES DE CC: Se clasifican según la forma de conectar las bobinas del inductor y del inducido entre sí. - Motor de excitación independiente Motor de excitación derivación o shunt Motor de excitación en serie Motor de excitación independiente Iex Ii Ra U´ U M Ri Las bobinas del inductor y del inducido se conectan a fuentes externas independientes. Rex E´ 3 Departamento de Tecnología. IE6$OPXGH\QH En el arranque la velocidad inicial es cero y por consiguiente, al no girar el rotor, la fuerza contraelectromotriz E´ = 0. Esto supone que la intensidad en el momento de arranque pueda alcanzar valores muy altos. Para disminuir esta intensidad inicial, se coloca una resistencia variable o reóstato Ra que varia con la velocidad (aumenta su valor cuando la velocidad es muy pequeña, y va desapareciendo al aumentar la velocidad del motor) Fórmulas - A velocidad de regimen o velocidad de funcionamiento nominal U – E´ = Ri. Ii U´ = Rex . Iex - En el arranque: E´ = 0 U = (Ra + Ri ). Iia U = tensión en bornes del motor (V) E´ = fuerza contraelectromotriz (V) Ri = resistencia del inducido (Ω) Rex = resistencia del inductor (Ω) Ra = reóstato de arranque (Ω) Ii = intensidad del inducido (A) Iex = intensidad del inductor (A) Iia = intensidad de arranque (A) Motor de excitación derivación o shunt Las bobinas del inductor y del inducido se conectan en paralelo. Ii Iex Ra U Rex M Ri El esquema es prácticamente igual al motor de excitación independiente, pero ambos devanados están conectados a la misma fuente de alimentación. Fórmulas E´ - A velocidad de regimen o velocidad de funcionamiento nominal U – E´ = Ri. Ii U = Rex . Iex I = Ii + Iex - En el arranque: E´ = 0 U = (Ra + Ri ). Iia U = tensión en bornes del motor (V) E´ = fuerza contraelectromotriz (V) Ri = resistencia del inducido (Ω) Rex = resistencia del inductor (Ω) Ra = reóstato de arranque (Ω) Ii = intensidad del inducido (A) Iex = intensidad del inductor (A) I = intensidad que el motor absorbe de la red (A) Iia = intensidad de arranque (A) 4 Departamento de Tecnología. ,(6$OPXGH\QH Motor de excitación en serie Las bobinas del inductor y del inducido se conectan en serie. I Fórmulas Ra U M Ri A velocidad de regimen o velocidad de funcionamiento nominal E´ U – E´ = (Ri + Rex ). I I = Ii = Iex Rex - En el arranque: E´ = 0 U = (Ra + Ri + Rex). Iia U = tensión en bornes del motor (V) E´ = fuerza contraelectromotriz (V) Ri = resistencia del inducido (Ω) Rex = resistencia del inductor (Ω) Ra = reóstato de arranque (Ω) Ii = intensidad del inducido (A) Iex = intensidad del inductor (A) I = intensidad que el motor absorbe de la red (A) Iia = intensidad de arranque (A) POTENCIA Y PÉRDIDAS DE POTENCIA Potencia absorbida: La potencia absorbida de la red es : Pab = U.I Potencia útil: La potencia útil del eje del motor es : Pu = E´ . I P = Pab – pérdidas = PCui - PCuex - PFe - Pm Pérdidas de potencia: - Pérdidas en el cobre del devanado inducido y del devanado inductor: son pérdidas debidas al calentamiento o efecto Joule PCui = Ri . Ii2 PCuex = Rex . Iex2 - Pérdidas en el hierro: son pérdidas debidas a la histéresis magnética. Se suelen despreciar en los cálculos. PFe - Pérdidas mecánicas: son pérdidas debidas al rozamiento en los puntos de unión de las partes móviles de la máquina. Se suelen despreciar en los cálculos. Pm 5 Departamento de Tecnología. IES Almudeyne RENDIMIENTO: Parte de la energía que se aporta al motor se pierde. ᶯ = Pútil / Pabsorbida INVERSIÓN DEL SENTIDO DE GIRO: Para invertir el sentido de giro de los motores de CC, hay que cambiar las conexiones del inducido con respecto al inductor. Esto es así, porque el sentido del par motor depende del campo magnético y del sentido de la corriente en los conductores. Si la inversión se realiza con el motor en marcha, es obligado cambiar las conexiones del inducido y no las del inductor, pues de lo contrario el motor se quedaría sin excitación. 6 Departamento de Tecnología. IES $OPXGH\QH RESUMEN TEMA 12: MOTORES DE CORRIENTE ALTERNA 1.- La corriente alterna (C.A.) La característica principal de una corriente alterna es que durante un instante de tiempo un polo es negativo y el otro positivo, mientras que en el instante siguiente las polaridades se invierten tantas veces como ciclos por segundo (hertzios) posea esa corriente. No obstante, aunque se produzca un constante cambio de polaridad, la corriente siempre fluirá del polo negativo al positivo, tal como ocurre en las fuentes de FEM que suministran corriente continua. En Europa la corriente alterna que llega a los hogares es de 220 V y tiene una frecuencia de 50 Hz. La forma más común de generar corriente alterna es empleando grandes generadores o alternadores ubicados en plantas termoeléctricas, hidroeléctricas o centrales atómicas. La corriente alterna se representa con una onda senoidal. ó I(A) 1 ciclo F = frecuencia (ciclos/s = Hertzio Hz) W = pulsación = 2πf U = Umáx sen 2πft = Umáx sen wt I = Imáx sen 2πft = Imáx sen wt Ventajas de la corriente alterna Entre algunas de las ventajas de la corriente alterna, comparada con la corriente continua, tenemos las siguientes: Se transporta a grandes distancias con poca pérdida de energía. Al incrementar su frecuencia por medios electrónicos en miles o millones de ciclos por segundo (frecuencias de radio) es posible transmitir voz, imagen, sonido y órdenes de control a grandes distancias, de forma inalámbrica. Los motores y generadores de corriente alterna son estructuralmente más sencillos y fáciles de mantener que los de corriente continua. 1 Departamento de Tecnología. IES$OPXGH\QH Sistemas más empleados de CA: Los sistemas más empleados para transporte y uso de la CA son: Sistema monofásico. En ese sistema se emplea una fase y un neutro (sistema bifilar), obteniéndose tensiones de 220 V. Sistema trifásico. Sistema formado por tres fases de corrientes alterna y un neutro, de igual frecuencia y valor eficaz, desfasadas entre si 120 grados. Esto permite tensiones de 220 V (entre fase y neutro) y de 380 V (entre fases). Los colores que según la normativa se emplean en los cables son: Fases R S T Neutro N Toma tierra negro o marrón azul claro rayas verde/amarilla POTENCIA EN CA: MONOFÁSICA P = U.I.cos φ = S cos φ Potencia activa: Q =U.I.sen φ =S sen φ Potencia reactiva: Potencia aparente: S = U.I Factor de potencia = cos φ (w) VAr) (VA) TRIFÁSICA P = 3 Uf.If.cos φ = S cos φ (w) Q = 3 Uf.If..sen φ =S sen φ (VAr) S = 3 Uf.If. (VA) Potencia activa Es la potencia que representa la cantidad de energía eléctrica que se va a transformar en trabajo. Aplicando un rendimiento dará la potencia útil. Se designa con la letra P y se mide en vatios (W). La potencia activa (absorbida) es debida a los elementos resistivos. Potencia reactiva Es la encargada de generar el campo magnético que requieren para su funcionamiento los motores y transformadores: Esta potencia sólo aparecerá cuando existan bobinas o condensadores en los circuitos. La potencia reactiva tiene un valor medio nulo, por lo que no produce trabajo útil. Se mide en voltamperios reactivos (VAR) y se designa con la letra Q. Esta potencia es debida únicamente a los elementos reactivos. 2 Departamento de Tecnología. IES Almudeyne Potencia aparente La potencia aparente de un circuito eléctrico de corriente alterna es la suma vectorial de la energía que consume dicho circuito en forma de calor o trabajo y la energía utilizada para la formación de los campos eléctricos y magnéticos de sus componentes. Esta potencia ha de satisfacer la energía consumida por los elementos resistivos y también la que van a "almacenar" bobinas y condensadores. Se la designa con la letra S y se mide en voltiamperios (VA). Relación entre potencias activas, aparentes y reactivas S2 = P2 + Q2 Factor de potencia El factor de potencia se define como el cociente de la potencia activa entre la potencia aparente; esto es: Cos φ = P / S El factor de potencia es un término utilizado para describir la cantidad de energía eléctrica que se ha convertido en trabajo. El valor ideal del factor de potencia es 1, esto indica que toda la energía consumida por los aparatos ha sido transformada en trabajo. Por el contrario, un factor de potencia menor a la unidad significa un mayor consumo de energía necesaria para producir un trabajo útil. 2.- Motores de CA trifásicos Se utilizan en la mayor parte de máquinas industriales. Están constituidas por el estator y el rotor. Estator: parte fija formada por una corona de chapas ferromagnéticas aisladas provistas de ranuras, donde se introducen 3 bobinas inductoras, cuyos extremos van conectados a la red. Es la parte encargada de crear el campo magnético. Rotor: parte móvil situada en el interior del estator, formado por chapas ferromagnéticas aisladas y ranuradas exteriormente. El bobinado del rotor puede estar de dos formas: Rotor de jaula de ardilla: en las ranuras se encuentran los bobinados del inducido cuyos extremos se unen entre sí en cortocircuito. Por tanto no hay posibilidad de conectar el devanado del rotor con el exterior. El rotor va montado sobre un eje 3 Departamento de Tecnología. IES Almudeyne Estator Bobina del estator Ranura del estator Entrehierro Rotor Bobina del rotor Rotor bobinado: los devanados del rotor van distribuidos en la periferia y sus extremos están conectados a anillos colectores montados sobre el mismo eje. Estator y rotor, tienen el mismo número de pares de polos. La separación de aire entre el estator y el rotor se llama entrehierro. FUNCIONAMIENTO: El motor se conecta a CA trifásica. Pero la corriente circula exclusivamente por las bobinas inductoras del estator. Esto genera un campo magnético giratorio (en CC es lineal). Como consecuencia del campo magnético giratorio en los conductores del rotor se inducen corrientes eléctricas. Estas corrientes interactúan con el campo magnético del estator, provocando fuerzas electromagnéticas que dan lugar al par motor que obliga a girar al rotor. El Campo magnético giratorio se obtiene con tres devanados desfasados 120º (acoplados en estrella o triángulo) y conectados a un sistema trifásico de C. A. 4 Departamento de Tecnología. IES Almudeyne R R S S T T N N Motor con 1 par de polos /fase Motor con 2 pares de polos /fase VELOCIDAD DE GIRO: Hay dos velocidades de giro, la del campo magnético y la del rotor. Velocidad de giro del campo magnético o velocidad síncrona: n1 60 f p f = frecuencia de corriente (Hz) p = nº de pares de polos del motor Velocidad de giro del rotor: n2 n1 (sino no hay giro) n2 n1 Deslizamiento absoluto: D n1 n2 Deslizamiento relativo: d n1 n2 100(%) n1 CONEXIÓN Y ARRANQUE DEL MOTOR: Para arrancar el motor hay que conectar entre sí las tres bobinas inductoras del estator, y efectuar la conexión a la red. U V W X Y Z La conexión puede ser con arranque directo en estrella o en triángulo. Al principio o fin de cada bobina se le llama con las letras U, V, W. Y al final con X, Y, Z. Tensión de línea: Es la diferencia de potencial que existe entre dos conductores de línea o entre fases. Tensión de fase: Es la diferencia de potencial que existe en cada uno de los bobinados o de las ramas monofásicas de un sistema trifásico. Intensidad de línea: Es la que circula por cada uno de los conductores de línea o de fase de la red eléctrica. Intensidad de fase: Es la que circula por cada uno de los bobinados o de las ramas monofásicas de un sistema trifásico. 5 Departamento de Tecnología. IES Almudeyne Conexión en estrella: Se consigue uniendo los terminales finales de las tres bobinas (X-Y-Z) en un punto común, que normalmente se conecta a neutro. Los terminales iniciales (U-V-W) se conectan a las fases de la red electrica IL R U UL IL UF IL S X Y IL UL R IL Z V U V Z X T W W UF UF T Y Caja de bornas IL N S 3 Uf UL= IL= If La intensidad de línea coincide con la de fase La potencia en trifásica se calcula sumando las potencias de las tres fases: P = 3 Uf.If.cos φ = S cos φ (w) Q =3 Uf.If..sen φ =S sen φ (VAr) S = 3 Uf.If. (VA) 3 UL.IL.cos φ = S cos φ (w) Q = 3 UL.IL..sen φ =S sen φ (VAr) S = 3 UL.IL. (VA) La potencia en una conexión en estrella es: : P = Cos φ = P / S R Conexión en triángulo: Este tipo de conexión se realiza uniendo el final de una bobina con el principio de la siguiente, hasta cerrar la conexión formando un triángulo. Es una conexión sin neutro. Después los tres extremos iniciales se conectan a las fases de la red. IL U Z UL IL S IF IF R S T X W y U V Z X W V UL IF T Y Caja de bornas IL UL= Uf IL= La tensión de línea coincide con la de fase 3 If 6 Departamento de Tecnología. IES Almudeyne La potencia trifásica es: P = 3 Uf.If.cos φ = S cos φ (w) Q =3 Uf.If..sen φ =S sen φ (VAr) S = 3 Uf.If. (VA) La potencia en una conexión en triángulo es: : P = 3 UL.IL.cos φ = S cos φ (w) Q = 3 UL.IL..sen φ =S sen φ (VAr) S = 3 UL.IL. (VA) Cos φ = P / S POTENCIA Y PÉRDIDAS DE POTENCIA: Potencia absorbida: La potencia absorbida de la red es : Pab = 3 U . I. cos φ Potencia útil: La potencia útil del eje del motor es : Pu = Pab – pérdidas = PCui - PCuex - PFe - Pm Pérdidas en el cobre: debidas al efecto Joule por calentamiento 2 En los conductores del estator: Pcuex = 3. Rex.(Iex) En los conductores del rotor: Pcui = 3. Ri.(Ii) 2 Pérdidas en el hierro: PFe debidas a las pérdidas por corrientes de Foucault. Pérdidas mecánicas: Pm RENDIMIENTO: Parte de la energía que se aporta al motor se pierde. ᶯ = Pu/Pab APLICACIONES: - Son sencillos y robustos Pueden arrancar a plena carga (elevado par motor) Buen rendimiento Se usan en instalaciones industriales de gran potencia. CAMBIO DE SENTIDO DE GIRO: Se consigue variando la rotación del campo magnético. Para ello se necesita cambiar la polaridad de dos de sus fases. PROCEDIMIENTOS DE ARRANQUE DEL MOTOR: El reglamento REBT regula según la potencia del motor, qué motores deben estar provistos de dispositivos de arranque que impidan intensidades de arranque muy elevadas. Limita además que la máxima caída de tensión en la red no debe superar el 15% durante el arranque. Se exige también contar con mecanismos que protejan de sobrecargas y sobreintensidades. Arranque de motores con rotor en jaula de ardilla: Arranque directo: para P< 5,5 kw Se dice que un motor arranca en forma directa cuando a sus bornes se aplica directamente la tensión nominal a la que debe trabajar. 7 Departamento de Tecnología. IES Almudeyne La intensidad de arranque será entre 3 y 8 veces la intensidad nominal. Su principal ventaja es el elevado par de arranque, que será entre 1 y 1,5 veces el par nominal. R S El arranque directo puede ser en estrella o en triángulo. Consiste en cerrar un contactor (generalmente asociado a un relé). T F Mientras el motor está funcionando queda protegido contra sobrecargas por un relé térmico RT y contra cortocircuitos por fusibles F. KM1 RT M R S R S UL UL T UL UL T F F KM1 KM1 RT RT IL IL IL IL IL U U UF Y UF Z IF X UF Arranque directo en estrella U IF W Z V IL W Y X V IF Arranque directo en triángulo Arranque estrella / triángulo: para P> 5,5 kw Para motores de alta potencia y preparados para conexión en triángulo, se utiliza un arranque transitorio en estrella. Este método se basa en disminuir la tensión aplicada al estator y así se consigue disminuir la corriente absorbida de la línea y el par. En este arranque se conecta el motor en estrella sobre una red donde debe de conectare en triángulo. De esta forma durante el arranque los devanados del estator están a una tensión veces inferior a la nominal. 8 Departamento de Tecnología. IES Almudeyne En el arranque los devanados del estator tendrán una tensión Uf = UL/ R 3 UL S UL T F Triángul o KM1 KM2 Estrella KM3 RT U V W X Y Z Se arranca el motor en estrella a tensión reducida Uf = UL/ 3 (220 V) (contactores KM1 y KM3 cerrados, KM2 abierto). Una vez que el motor alcanza el 80% de su velocidad nominal se desconecta la conexión en estrella y se conecta en triángulo (380 V) (contactor KM3 abierto y se cierra KM1 y KM2). La tensión durante el arranque se reduce 1,73 veces ( reduce 3 veces la intensidad nominal. 3 ). La intensidad de arranque se Arranque con autotransformador: Se utiliza un transformador de arranque que permite reducir la tensión durante el arranque e ir aumentando la tensión de forma escalonada. Al acelerar el motor se va aumentando la tensión. Arranque con resistencias variables: Se intercalan reóstatos o resistencias variables con la velocidad, en cada fase del motor. Al aumentar la velocidad del motor, disminuye el valor de la resistencia hasta desaparecer. Arranque electrónico: Se utilizan tiristores que permiten aplicar un aumento progresivo de tensión. Arranque de motores con rotor en bobinado: Se arrancan intercalando varios grupos de resistencias en el circuito del rotor. El motor arranca con todas las resistencias y a medida que el motor adquiere revoluciones se eliminan grupos de resistencias hasta alcanzar la velocidad nominal. 3.- Motores de CA monofásicos Se utilizan para aplicaciones de muy baja potencia (de hasta 1CV), electrodomésticos y pequeñas máquinas-herramientas. Este tipo de motor es similar al trifásico con rotor de jaula de ardilla, con la diferencia que su estator está constituido por una sola bobina por lo que el campo magnético que se produce no es giratorio. Esto hace que no sean capaces de ponerse en 9 Departamento de Tecnología. IES Almudeyne funcionamiento sólos, necesitando un bobinado auxiliar para empezar a girar. POTENCIA EN CA MONOFASICA: Potencia activa: P = U.I.cos φ (w) = S cos φ Potencia reactiva: Q =U.I.sen φ (VAr) =S sen φ Potencia aparente: S = U.I (VA) 4.- Motores universales Pueden conectarse a CC o CA monofásica. Su constitución es similar a un motor serie de CC. Tienen elevado par de arranque, por lo que pueden conectarse a plena carga. Su velocidad de giro se adapta a la carga. Se utilizan en pequeñas máquinas-herramientas (taladros portátiles, etc.) y en electrodomésticos de tamaño medio. Una variante de este tipo de motores es el motor universal con imán permanente. En lugar de bobinas inductoras lleva un imán permanente que es el encargado de crear el campo magnético necesario. 5.- Ejercicios: - PAU Junio 2009/2010 - PAU Septiembre 2003/2004 10 MOTORES DE C.C. Y C.A. Estator También denominado inductor porque crea el campo magnético de la máquina eléctrica, representa la parte fija del motor. Rotor También denominado inducido porque en él se crea la fuerza contraelectromotriz “E’”, representa la parte móvil del motor. PRINCIPIO DE INDUCCIÓN ELECTROMAGNÉTICA Establece que, en todo conductor eléctrico que se mueve dentro de un campo magnético cortando líneas de fuerza se induce en él una fuerza electromotriz “E” (f.e.m.) que depende de la inducción magnética, de la longitud del conductor y de la velocidad de desplazamiento del conductor. Distancia o espacio existente entre el estator y el rotor. Motor síncrono n = 60 · f p Máquina de corriente alterna cuyo rotor gira a igual velocidad que el campo magnético. Magnitudes y unidades n = Velocidad de giro del motor (r.p.m.) f = Frecuencia de la red eléctrica en Hertzios (Hz) p = Pares de polos o número de campos magnéticos (N-S) del motor E=L·v·B Magnitudes y unidades E = f.e.m. en voltios (V) B = Inducción en Teslas (T) L = Longitud del conductor en metros (m) v = Velocidad de desplazamiento (m/s) Motor asíncrono Esta f.e.m. inducida está presente tanto si la máquina funciona como motor o como generador, pero en el caso de los motores debido al sentido del campo magnético, recibe el nombre de fuerza contraelectromotriz (E’). Máquina de corriente alterna cuya velocidad angular es menor que la del campo magnético. Devanado Hilo de cobre arrollado que forma parte de las máquinas eléctricas. Lo podemos encontrar tanto en el estator como en el rotor. Histéresis FUERZA ELECTROMAGNÉTICA Todo conductor recorrido por una corriente y bajo la acción de un campo magnético se ve sometido a una fuerza magnética de repulsión o atracción cuyo valor está dado por: Representa la inercia que tienen los materiales ferromagnéticos a seguir imantados una vez que desaparece el efecto que provocó la imantación. Corrientes de Foucault F = I · L · B · sen α Magnitudes y unidades E = Fuerza en Newton (N) B = Inducción en Teslas (T) L = Longitud del conductor en metros (m) I = Intensidad eléctrica que recorre el conductor (A) α = Ángulo formado entre el conductor y la dirección del campo magnético Par electromagnético (M i) Si tenemos un conductor que se mueve en un rotor de radio “r”, indica el par que experimenta cuando recibe una fuerza “F” que lo impulsa a girar. Entrehierro Mi = F · r Son corrientes eléctricas inducidas en materiales magnéticos como consecuencia de la variación del flujo magnético. Producen pérdidas de potencia en las máquinas eléctricas, que se reducen construyendo el estator y el rotor con chapas en lugar de bloques macizos. Escobillas Piezas de grafito destinadas a mantener en un motor de c.c. el contacto eléctrico por fricción entre el rotor y la fuente de corriente. Colector Dispositivo al que van a parar todos los conductores del rotor. Está dividido en varias partes aisladas entre si, llamadas delgas. Sobre los colectores se apoyan las escobillas. POTENCIA ELÉCTRICA Potencia electromagnética (P i) Si el conductor anterior gira a una velocidad angular “ω”, la potencia desarrollada se puede calcular mediante la expresión: Pi = Mi · ω Definimos previamente las siguientes magnitudes eléctricas: Tensión Representa el trabajo necesario para mover la unidad de carga eléctrica entre dos puntos de un campo eléctrico: ΔU = W q ( CJ ) Cuaderno de Tecnología Industrial II 33 Magnitudes y unidades E = Fuerza electromotriz en voltios (V) Ub = Tensión en bornes de la dinamo en voltios (V) Ue = Tensión en las escobillas (V) I = Corriente de inducido (A) Rex = Resistencia de excitación (Ω) Ri = Resistencia de inducido (Ω) Intensidad Representa las cargas eléctricas (electrones) que circulan por unidad de tiempo. Se define como el producto de la tensión por la intensidad: I= q t ( CS ) Potencia 2 P = U · I = I2 · R = U Se calcula como el producto de la R tensión por la intensidad: Magnitudes y unidades P = Potencia en vatios (w) W = Trabajo en julios (J) U = Tensión en voltios (V) I = Intensidad en amperios (A) t = Tiempo transcurrido en segundos (s) q = Carga eléctrica en culombios (C) R = Resistencia en ohmios (Ω) Recuerda: 1 C = 6,3 × 1018 e- (electrones) FUERZA CONTRAELECTROMOTRIZ DE UNA DINAMO (E’) Motor serie: Motor paralelo: E’ = Ub – I · Ri – 2 · Ue Magnitudes y unidades E = Fuerza contraelectromotriz en voltios (V) Ub = Tensión en bornes de la dinamo en voltios (V) Ue = Tensión en las escobillas (V) I = Corriente de inducido (A) Rex = Resistencia de excitación (Ω) Ri = Resistencia de inducido (Ω) PÉRDIDAS EN LAS MÁQUINAS ELÉCTRICAS No toda la energía que absorbe un motor se transforma en energía mecánica en el eje, se producen las siguientes pérdidas de potencia: t Pérdidas en el hierro (PFe): en todas las partes ferromagnéticas de la máquina se producen pérdidas por histéresis y por Foucault que se traducen en el calentamiento del motor. t Pérdidas mecánicas (Pmec): son debidas al giro del rotor y corresponden a las pérdidas por ventilación forzada, al roce del motor con el aire y al rozamiento en los cojinetes y en las escobillas. t Pérdidas en los conductores de cobre (PCu): corresponden a las pérdidas por efecto Joule en todos los devanados de la máquina. E’ = Ub – (Ri + Rex) · I – 2 · Ue CONEXIÓN DE MOTORES TRIFÁSICOS Conexión en estrella: UF = UL √3 Pab = 3 · UF · IF · cos ϕ 2 PCu = I · R Magnitudes y unidades R = Resistencia eléctrica del conductor en Ohmios (Ω) I = Intensidad en Amperios (A) Conexión en triángulo: = IF = √3 S= PASO DE TRIÁNGULO A ESTRELLA Y VICEVERSA RA = RAB · RAC RAB + RAC + RBC RAB = RA · RB + RB · RC + RC · RA RC RB = RAB · RBC RAB + RAC + RBC RAC = RA · RB + RB · RC + RC · RA RB RC = RBC · RAC RAB + RAC + RBC RBC = RA · RB + RB · RC + RC · RA RA Dinamo paralelo: 34 TRIÁNGULO DE POTENCIAS FUERZA ELECTROMOTRIZ DE UNA DINAMO (E) Dinamo serie: Magnitudes y unidades UF = Tensión de fase en voltios (V) UL = Tensión de línea en voltios (V) IF = Intensidad de fase en amperios (V) IL = Intensidad de línea en amperios (V Pab = Potencia absorbida en vatios (w) n1 – n n1 Magnitudes y unidades f1= Frecuencia de la red eléctrica en Hertzios (Hz) p = Pares de polos del motor n1= Velocidad de sincronismo (r.p.m.) n = Velocidad de giro del motor (r.p.m.) S = Deslizamiento (%) Pab = 3 · UF · IF · cos ϕ Pu Pab Expresa la variación en tanto por ciento entre la velocidad de sincronismo (n1) del campo magnético y la velocidad real (n) del motor. 60 · f1 p DESLIZAMIENTO DE UN MOTOR ASÍNCRONO (S) n1 = IL RENDIMIENTO (η) Se define como la relación Potencia útil entre la potencia útil (Pu) en el η = Potencia absorbida eje del motor y la potencia absorbida (Pab) por el mismo: E = Ub + (Ri + Rex) · I + 2 · Ue E = Ub + I · Ri + 2 · Ue Cuaderno de Tecnología Industrial II cos ϕ = P S Q sen ϕ = S (QXQFLDGRVGHSUREOHPDVFF S 8Q PRWRU HOpFWULFR GH FRUULHQWH FRQWLQXD FRQ H[FLWDFLyQ HQ GHULYDFLyQ TXH WLHQH ODV VLJXLHQWHV FDUDFWHUtVWLFDV 7HQVLyQ DOLPHQWDFLyQ 8 9 UHVLVWHQFLD GHO GHYDQDGR GH Problema 3. &DOFXODU D ,QWHQVLGDGHQODOtQHD E ,QWHQVLGDGGHH[FLWDFLyQ F ,QWHQVLGDGGHFRUWRFLUFXLWR G 9DORUGHOUHyVWDWRGHDUUDQTXHSDUDTXHHQHVHUpJLPHQQRVHVXSHUHHOYDORUGH LQWHQVLGDG,Q H 3DUPRWRUVLJLUDUSP 'HXQPRWRUGHFFGHH[FLWDFLyQGHULYDFLyQWLHQHXQDSRWHQFLDGH&9VHVDEHTXH ODV SpUGLGDV GHO PRWRU VRQ GHO GH VX SRWHQFLD HQ HO HMH 6L 8E Y 5G \ 5L Problema 2. 8QPRWRUGHFF H[FLWDGRVHJ~QHOFLUFXLWRGHOGLEXMR WLHQHXQDWHQVLyQHQERUQHVGH Y VL OD IXHU]D FRQWUDHOHFWURPRWUL] JHQHUDGD HQ HO LQGXFLGR HV GH Y \ DEVRUEH XQD FRUULHQWHGH$ VHGHVSUHFLDQODUHDFFLyQGHLQGXFLGR\ODVSpUGLGDVPHFiQLFDV &DOFXODU D 5HVLVWHQFLDWRWDOGHLQGXFLGR E 3RWHQFLDDEVRUELGDGHODOtQHD F 3RWHQFLD~WLOHQHOHMH G 3DUQRPLQDOVLHOPRWRUJLUDDUSP H 5HQGLPLHQWRHOpFWULFR Problema 1. 0RWRUHVHOpFWULFRV 8Q PRWRU GH FF H[FLWDFLyQ GHULYDFLyQ WLHQH XQD WHQVLyQ GH DOLPHQWDFLyQ GH 9 OD SRWHQFLD TXH DEVRUEHGH OD UHGHV GH .Z FXDQGR JLUD HQ XQUpJLPHQ D USP SUHVHQWD XQ UHQGLPLHQWR GHO \ OD UHVLVWHQFLD GHO GHYDQDGR GH H[FLWDFLyQ HV ȍ 'HWHUPLQDU D )XHU]DFRQWUDHOHFWURPRWUL] E 5HVLVWHQFLDGHOGHYDQDGRGHOLQGXFLGR F 3DU~WLOHQHOHMH Problema 5. 8QPRWRUGHFFH[FLWDFLyQVHULHGHWHQVLyQHQERUQHV9JLUDHQUpJLPHQQRPLQDOD USP (O GHYDQDGR LQGXFLGR WLHQH XQD UHVLVWHQFLD GH ȍ \ OD GHO GHYDQDGR GH H[FLWDFLyQHVGHȍODUHVLVWHQFLDGHORVSRORVDX[LOLDUHVHVGHȍ\VXIFHPHVGH 9'HWHUPLQDU D &RUULHQWHHQHOPRPHQWRGHODUUDQTXH E ,QWHQVLGDGDEVRUELGDGHODOtQHD F 3RWHQFLDDEVRUELGDGHODUHG G 3pUGLGDGHSRWHQFLDHQORVGHYDQDGRV H 5HQGLPLHQWRGHOPRWRU Problema 4. H[FLWDFLyQ5H[F ȍ5HVLVWHQFLDGHOLQGXFLGR5L ȍ,QWHQVLGDGDEVRUELGDGHOD UHG,DEV $3RWHQFLD~WLO&9 'HWHUPLQH D /DLQWHQVLGDGGHH[FLWDFLyQ\ODLQWHQVLGDGGHOLQGXFLGR E 5HQGLPLHQWRGHOPRWRU F (OSDU~WLOFXDQGRHOPRWRUJLUDDUSP 1RWD 'HVSUHFLDU HQ HVWH SUREOHPD OD FDtGD GH WHQVLyQ HQ ODV HVFRELOODV \ OD UHVLVWHQFLD GHOUHyVWDWRGHDUUDQTXH\GHORVSRORVDX[LOLDUHV 0RWRUHVHOpFWULFRV 8QPRWRUGHFFVHULHWLHQHXQDWHQVLyQHQERUQHVGHY\DEVRUEHGHODUHG$/D IFHP JHQHUDGD HQ HO LQGXFLGRHV GH Y \ ODV SpUGLGDV HQ HO KLHUUR PiV ODV PHFiQLFDV VRQGHZ Problema 8. 3DUDXQDGHWHUPLQDGDDSOLFDFLyQVHUHTXLHUHXQPRWRUGHHOHYDGRSDUGHDUUDQTXHSRUOR TXHVHHOLJHXQPRWRUHQVHULHTXHSURSRUFLRQD&9DUSPFXDQGRVHFRQHFWDD 9DEVRUEH$6HVDEHTXH5L5S ȍ5V ȍ\9H 9 'HWHUPLQD D ¢&XiOVHUiVXYHORFLGDGVLODFRUULHQWHDEVRUELGDDXPHQWDXQ" E ¢&XiOVHUiVXYHORFLGDGVLODFRUULHQWHDEVRUELGDGLVPLQX\HXQ" Problema 7. 8QPRWRUGHFFH[FLWDFLyQFRPSRXQGODUJDWLHQHODVVLJXLHQWHVFDUDFWHUtVWLFDV7HQVLyQ HQ ERUQHV 9 UHVLVWHQFLD GH LQGXFLGR ȍ UHVLVWHQFLD GH H[FLWDFLyQ VHULH UHVLVWHQFLDGHH[FLWDFLyQGHULYDFLyQȍHQUpJLPHQQRPLQDOJLUDDUSPJHQHUD XQDIFHPGH9\VXPLQLVWUDXQDSRWHQFLDPHFiQLFDGHZ&DOFXODU D ,QWHQVLGDGHVGHFRUULHQWHHQVXVERELQDGRV E 5HVLVWHQFLDGHH[FLWDFLyQVHULH F 3DUPRWRU\UHQGLPLHQWRGHOPRWRU Problema 6. 0RWRUHVHOpFWULFRV 'HWHUPLQDU D (OPRPHQWRDQJXODURSDUPHFiQLFRVXPLQLVWUDGR E /DUHVLVWHQFLDGHOLQGXFLGR\ODIFHP 8Q PRWRU GH FRUULHQWH FRQWLQXD GH H[FLWDFLyQ GHULYDFLyQ HV DOLPHQWDGR D OD WHQVLyQ GH 9 'H OD OtQHD DEVRUEH XQD SRWHQFLD GH NLORYDWLRV \ JLUD D USP /D UHVLVWHQFLDGHOGHYDQDGRLQGXFWRUHVGHȍ\VXUHQGLPLHQWRGHO Problema 10. 8QPRWRUVHULHSRVHHXQDUHVLVWHQFLDHQHOLQGXFLGRGHȍ/DUHVLVWHQFLDGHOGHYDQDGR GH H[FLWDFLyQ VHULH YDOH ȍ /D WHQVLyQ GH OtQHD HV GH 9 \ OD IFHP GH 9 'HWHUPLQDU D /DLQWHQVLGDGQRPLQDOGHODOtQHD E ,QWHQVLGDGTXHDEVRUEHHQHODUUDQTXH F 5HVLVWHQFLDDFRQHFWDUSDUDUHGXFLUODLQWHQVLGDGGHDUUDQTXHDOGREOHGHODQRUPDO 6HGHVSUHFLDODFDtGDGHWHQVLyQHQODVHVFRELOODV Problema 9. 6HGHVSUHFLDODFDtGDGHWHQVLyQHQODVHVFRELOODV &DOFXODU D %DODQFHGHSRWHQFLDGHOPRWRU E 5HQGLPLHQWRHOpFWULFR F 5HQGLPLHQWRLQGXVWULDO 0RWRUHVHOpFWULFRV 8QPRWRUGHFFGHH[FLWDFLyQFRPSXHVWDODUJDWLHQHSRUFDUDFWHUtVWLFDV )HFP Y UHVLVWHQFLD GHO LQGXFLGR ȍ UHVLVWHQFLD GHO LQGXFWRU HQ VHULH ȍ UHVLVWHQFLDGHOLQGXFWRUHQSDUDOHORȍ Problema 13. &DOFXOD D /DIFHP E /DSRWHQFLDVXPLQLVWUDGDDOHMHGHODFDUJD F (OSDUPRWRUVXPLQLVWUDGR 8QPRWRUGHFFGHH[FLWDFLyQGHULYDFLyQHVDOLPHQWDGRSRUXQDOtQHDGHY\FRQVXPH GHODPLVPDXQDSRWHQFLD3 Z6DELHQGRTXHODUHVLVWHQFLDGHOLQGXFLGRHVȍ\ ODGHOLQGXFWRUȍ\TXHDUUDVWUDXQDFDUJDDUSP6HFRQVLGHUDQQXODVODFDtGD GHWHQVLyQHQODVHVFRELOODV Problema 12. &DOFXODU D (VTXHPDHOpFWULFR\HFXDFLyQGHWHQVLRQHV E ,QWHQVLGDGHVTXHFLUFXODQSRUHOPRWRU F 9HORFLGDGGHOPRWRUSDUD,L\,L G /DFRUULHQWHGHDUUDQTXH SRUHOLQGXFLGR H 9DORUGHOUHRVWDWRGHDUUDQTXHDFRQHFWDUHQVHULHFRQHOGHYDQDGRGHOLQGXFLGR SDUDOLPLWDUODLQWHQVLGDGGHDUUDQTXHDOGREOHGHODQRPLQDO 8QPRWRUGHFRUULHQWHFRQWLQXDWLSRGHULYDFLyQGHYJLUDDUSP/DUHVLVWHQFLD GHOLQGXFLGRHVGHȍODUHVLVWHQFLDGHH[FLWDFLyQYDOHȍ/DSRWHQFLDDEVRUELGDGH ODUHGYDOHZ Problema 11. 0RWRUHVHOpFWULFRV &DOFXOD 8Q PRWRU GH FF GH H[FLWDFLyQ FRPSXHVWD ODUJR HV DOLPHQWDGR D Y \ DEVRUEH XQD SRWHQFLDGHODUHGGHZDUSP6LVXVUHVLVWHQFLDVVRQ5 L ȍ5HV ȍ\ 5HG ȍ Problema 15. &DOFXOD D &RUULHQWHVSRUVXVGHYDQDGRV E /DIFHP F /DSRWHQFLDPHFiQLFDVXPLQLVWUDGD SRWHQFLD~WLO \HOSDUPRWRU 8QPRWRUGHFFGHH[FLWDFLyQFRPSXHVWDODUJDHVDOLPHQWDGRDY /RV YDORUHV GH VXV UHVLVWHQFLDV VRQ 5HG ȍ 5HV ȍ \ 5L ȍ 6H VDEH TXH FXDQGR VH DFRSOD D VX HMH XQD FDUJD DEVRUEH GH ORV KLORV GH OD OtQHD XQD SRWHQFLD GH Z\JLUDDUSP Problema 14. 6LVHDOLPHQWDDXQDWHQVLyQGHYGHWHUPLQDU D &RUULHQWHVTXHFLUFXODQSRUVXVGHYDQDGRV E 3RWHQFLDPHFiQLFDVXPLQLVWUDGD SRWHQFLD~WLO ODSRWHQFLDDEVRUELGDGHODOtQHD GHDOLPHQWDFLyQ\ODVSpUGLGDVGHFDORUHQVXVGHYDQDGRV F (OSDUPRWRUHQ1PVDELHQGRTXHJLUDDUSP 0RWRUHVHOpFWULFRV 8QPRWRUGHFRUULHQWHFRQWLQXDGHULYDFLyQGH&9GHSRWHQFLD~WLO\9JLUDD USPVLHQGRVXUHQGLPLHQWRGHO/DUHVLVWHQFLDGHOLQGXFLGRHVȍ\ODFRUULHQWH GHH[FLWDFLyQGH$ Problema 18. 'HWHUPLQDU D ,QWHQVLGDGQRPLQDO E ,QWHQVLGDGTXHDEVRUEHHQHODUUDQTXH F 5HVLVWHQFLDDFRQHFWDUSDUDTXHODLQWHQVLGDGGHDUUDQTXHRVXSHUHDOGREOHGHOD QRPLQDO 8Q PRWRU VHULH SRVHH XQD UHVLVWHQFLD HQ HO LQGXFLGR GH ȍ \ OD UHVLVWHQFLD GHO GHYDQDGRGHH[FLWDFLyQYDOHȍ6LHQGRODWHQVLyQGHOtQHDY\ODIFHPY Problema 17. 8QPRWRUFFGHH[FLWDFLyQHQVHULHGHY$USP5L ȍ5V ȍ 'HWHUPLQD)XHU]DFRQWUDHOHFWURPRWUL]\SDUQRPLQDO 8Q PRWRU GH FRUULHQWH FRQWLQXD GH &9 WLHQH XQ UHQGLPLHQWR GHO FXDQGR VH DOLPHQWDD9 6L VH VDEH DGHPiV TXH VXV SpUGLGDV HQ HO FREUH VRQ LJXDOHV D OD VXPD GH ODV RWUDV SpUGLGDVFDOFXOH D /DLQWHQVLGDGTXHDEVRUEHHOPRWRU E /DVXPDGHSpUGLGDVHQHOKLHUUR\PHFiQLFDV F /DSRWHQFLDHOpFWULFDLQWHUQD\ODIFHP Problema 20. D &DOFXODODVFRUULHQWHVHQHOLQGXFWRU\HQHOLQGXFLGR E 'HWHUPLQDODSRWHQFLDHQSpUGLGDVGHOPRWRUODSRWHQFLD~WLO\HOUHQGLPLHQWR F &DOFXODODIFHPHQHOURWRU G +DOOD HO SDU SURSRUFLRQDGR D OD ERPED ¢&XiO VHUtD VL ODV SpUGLGDV HQ HO KLHUUR \ PHFiQLFDVIXHVHQQXODV" 8Q PRWRU GH FF GH H[FLWDFLyQ HQ GHULYDFLyQ VH FRQHFWD D XQD OtQHD GH 9 SDUD DFFLRQDU XQD ERPED &RQ HOOD FRQHFWDGD FRQVXPH GH OD UHG $ D USP /D UHVLVWHQFLDGHOLQGXFLGRHVGHȍ\ODGHOGHYDQDGRLQGXFWRUGHȍ/DVSpUGLGDVHQHO KLHUUR\ODVPHFiQLFDVVHKDQHVWLPDGRHQ:\:UHVSHFWLYDPHQWH Problema 19. +DOODU D 3RWHQFLDDEVRUELGDSRUHOPRWRU E ,QWHQVLGDGDEVRUELGDGHODUHG F ,QWHQVLGDGGHFRUULHQWHHQHOLQGXFLGR G )XHU]DFRQWUDHOHFWURPRWUL] D &RUULHQWHGHOLQGXFLGR\IFHP E (OUHQGLPLHQWRGHOPRWRU F (OSDUPRWRUVXPLQLVWUDGR Problema 16. 0RWRUHVHOpFWULFRV 0RWRUHVHOpFWULFRV EJERCICIOS DE MÁQUINAS DE C.A. 1. Calcula el deslizamiento de un motor asincrono de cuatro polos, cuya velocidad de giro es de 1.350 r.p.m. que está conectado a una red de 50 Hz de frecuencia. 2. Un motor de corriente alterna monofásico tiene una potencia P = 5 CV, un rendimiento del 70% y un cos = 0,8. Determina: a) La intensidad que absorbe el motor. b) Las pérdidas que tiene el motor. c) El par motor cuando gira a 1.200 r.p.m. 3. De un motor trifásico se conocen los siguientes datos: 220/380 V, factor de potencia 0,85, rendimiento 90% y potencia útil 50 CV. Determina: a) La intensidad de corriente que pasa por la línea de alimentación cuando el motor se conecta en triangulo. b) La intensidad de corriente que pasa por la línea de alimentación cuando el motor se conecta en estrella. c) La intensidad de corriente que pasa por las bobinas del estator en ambos casos. d) Las pérdidas del motor cuando se conecta en triangulo. 4. Un motor de inducción trifásico de 220 V, 50 Hz y cuatro polos mueve una carga cuyo par resistente es de 6,5 N × m. Sabiendo que el motor absorbe de la red 1.200 W y que su rendimiento es de 0,82, determinar la velocidad de su eje y el desplazamiento. 5. Un motor de inducción trifásico tiene una potencia de 50 CV y está conectado a una tensión de 380 V. Su factor de potencia es de 0,8 y su rendimiento del 85%. Suponiendo que está conectado en estrella, determina: a) La intensidad de fase. b) La potencia activa, reactiva y aparente. 6. Un motor trifásico absorbe una intensidad de 20 A cuando se conecta a una red de 380 V, con un cos = 0,8. La resistencia del estator es de 2 Ω cuando la intensidad que circula es de 11,55 A. Conocemos también que las perdidas en el hierro son de 200 W, y las del cobre del rotor más las perdidas mecánicas son de 500 W. Determina: a) La potencia absorbida por el motor. b) Las pérdidas de potencia en el cobre del estator. c) La potencia electromagnética transmitida al rotor. d) La potencia útil y el rendimiento. 7. Un motor de inducción trifásico con el estator conectado en estrella a una red de 380 V, 50 Hz, desarrolla un par útil de 35 N∙m girando a 715 r.p.m. La potencia electromagnética transmitida es de 2.820 W y las perdidas en el cobre tanto del estator como del rotor son de 99 W mientras que las pérdidas en el hierro son de 150 W. Determina: a) Potencia útil en el eje. b) Pérdidas de potencia y rendimiento. c) Intensidad absorbida por el motor si el cos = 0,82. 8. Un motor de inducción trifásico de 45 kW, 380 V, 6 polos, 50 Hz, rotor de jaula de ardilla, acciona una carga cuyo par resistente (Mr) es proporcional a la velocidad, e igual a 600 N∙m a 1.500 r.p.m. Sabiendo que el deslizamiento del motor a plena carga es del 8%, despreciando las perdidas mecánicas, y aceptando que su característica par-velocidad es lineal entre S = 0 y S = 15%, determina: a) La velocidad de giro del sistema motor-carga cuando el motor está alimentado a la tensión nominal. b) Que par y que potencia suministra el motor? 9. Un motor de corriente alterna trifásico de 15 kW con dos pares de polos y el estator conectado en triangulo (220 V-50 Hz), tiene un factor de potencia de 0,75 y un rendimiento del 80%. Determinar: a) La intensidad de corriente que circula por el devanado el estator. b) La velocidad de giro del motor si el deslizamiento es del 4%. c) Las pérdidas de potencia y el par motor en el eje. d) Aplicando al eje del motor un torno de elevación de 20 cm de radio y una reducción de 1:20, calcula la velocidad a la que subirá una carga de 1.200 kg si el rendimiento del mecanismo del torno es del 92%. Se aceptara que entre el sincronismo y el deslizamiento correspondiente al par máximo, los pares útiles son proporcionales a los deslizamientos.