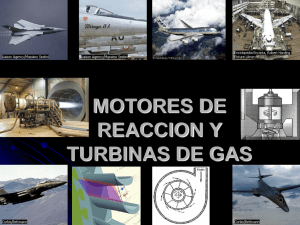
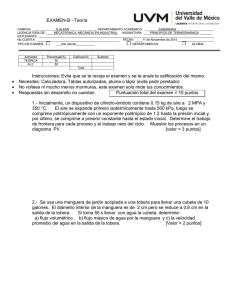
POLITEXT 134 Máquinas térmicas motoras - 1 POLITEXT Jesús Andrés Álvarez Flórez, ed. Ismael Callejón Agramunt, ed. Sergi Forns Farrús Pere Roca Carles David Balsells Grande Juan Casanova Rossell Tomás Navarro Odriozola Carles Forcadell Freixa Angelita González Fontal Antoni Márquez Luque Francisco J. Pérez Llopis Máquinas térmicas motoras - 1 EDICIONS UPC La presente obra fue galardonada en el octavo concurso "Ajut a l'elaboració de material docent" convocado por la UPC. Colaboradores: Mònica Álvarez, Francesc Batalla, Gabriela Benveniste, Òscar Bonet, Xavier Carrera, Juan Manuel Castro, Òscar Civit, Jordi Escura, Irene Espada, Xavier Flores, David González, Ricard Ibáñez, Andreu Iglesias, Luis Isidro, Josep Antón Jiménez, Oscar Jiménez, Francisco Liesa, Ana Mª Marimón, Salvador Miret, Eduard Moreno, Josep Mª Piguillem, Julio Pérez, Lluc Puig, Eloi Robert, Joan Rovira, Bartolomé Salom, David Sánchez, Álvaro Serrano, Xavier Soldevila, Agustí Vilella, Joaquin Villa, Jordi Yubero Primera edición: septiembre de 2002 Diseño de la cubierta: Manuel Andreu © Los autores, 2002 © Edicions UPC, 2002 Edicions de la Universitat Politècnica de Catalunya, SL Jordi Girona Salgado 31, 08034 Barcelona Tel.: 934 016 883 Fax: 934 015 885 Edicions Virtuals: www.edicionsupc.es E-mail: edicions-upc@upc.es Producción: Copistería Miracle, SL Rector Ubach 6-10, 08021 Barcelona Depósito legal: B-27729-2002 ISBN: 84-8301-644-3 ISBN Obra completa: 84-8301-646-X Quedan rigurosamente prohibidas, sin la autorización escrita de los titulares del copyright, bajo las sanciones establecidas en las leyes, la reproducción total o parcial de esta obra por cualquier medio o procedimiento, comprendidos la reprografía y el tratamiento informático, y la distribución de ejemplares de ella mediante alquiler o préstamo públicos. Prólogo 7 Prólogo Esta obra ha sido realizada en el Laboratori de Motors Tèrmics de la Escola Tècnica Superior dEnginyeria de Barcelona de la Universitat Politècnica de Catalunya conjuntamente con el CREMIT, el Centre de Recerca de Motors i Instal·lacions Tèrmiques de la Xarxa de Innovació Tecnológica de la Generalitat de Catalunya. Su inicio se remonta a 1994, año en el que se inició experimentalmente un nueva metodología docente de la asignatura de Motores Térmicos de la titulación de Ingeniería Industrial, en la que, de forma prioritaria, se potenciaba la participación del alumno en su propio proceso formativo mediante un método basado en el autoaprendizaje tutelado. Gracias al grado de madurez y predisposición de los alumnos fue generándose una amplia base documental formada por trabajos escritos del ámbito de los motores térmicos, la calidad de aquellos trabajos tutelados representaron, de forma parcial, un primer esbozo embrionario de este libro. Estos primeros resultados animaron a definir una estrategia, a largo plazo, para la generación de una base documental propia que se apoyase en los distintos trabajos de investigación realizados y se articulase mediante los proyectos de final de carrera de nuestros alumnos. La base documental establecida, convenientemente revisada, ampliada y actualizada y mediante la ayuda otorgada por la Universitat Politècnia de Catalunya para la realización de la misma, ha concluido en el presente libro de Máquinas térmicas motoras, que ha sido concebido para aportar al lector una visión general de las diferentes y posibles máquinas térmicas motoras existentes, al objeto de cubrir necesidades bibliográficas básicas para el seguimiento de la asignatura de Ingeniería y Máquinas Térmicas, que se imparte en las Escuelas de Ingeniería Industrial. El objetivo principal de la obra es ofrecer una visión horizontal de las distintas tipologías de motores térmicos empleados en la actualidad, aglutinando y homogeneizando las dispersas fuentes escritas existentes. El primer capítulo constituye una reflexión sobre la transferencia de energía, a partir del concepto de acumulador de energía y de flujo energético. Esta diferenciación es esencial para poder valorar adecuadamente los rendimientos implicados en las distintas transformaciones de energía que conllevan el rendimiento global de un determinado uso. La definición de un ámbito global en el que se implementan las diferentes máquinas transformadoras de energía permite establecer y contextualizar la importancia de las máquinas térmicas y los ciclos termodinámicos como base del aprovechamiento actual de las fuentes energéticas disponibles . © Los autores, 2002; © Edicions UPC, 2002. © Los autores, 2002; © Edicions UPC, 2002. Indice 9 Indice 1 1.1 1.2 1.3 1.4 1.5 1.6 Transferencia de energía Introducción .............................................................................................................................. 17 Análisis de la transformación de energía ................................................................................... 19 1.2.1 Tipos de acumulador ......................................................................................................... 20 1.2.2 Tipos de flujo de energía ................................................................................................... 21 1.2.3 Proceso de transformación ................................................................................................ 22 Fuentes de energía ..................................................................................................................... 24 1.3.1 Energía solar ....................................................................................................................... 24 1.3.2 Energía nuclear ................................................................................................................... 25 1.3.3 Interacción gravitatoria ...................................................................................................... 25 1.3.4 Energía geotérmica ............................................................................................................. 27 Transformadores de acumulador a flujo de energía (A/F) .......................................................... 27 1.4.1 Transformación de energía térmica a calor ........................................................................ 27 1.4.2 Transformación de energía química a calor ........................................................................ 30 1.4.3 Transformación de energía nuclear a calor ........................................................................ 33 1.4.4 Transformación de energía química a trabajo eléctrico ...................................................... 37 1.4.5 Transformación de energía dinámica a trabajo mecánico .................................................. 38 Transformadores de flujo ........................................................................................................... 40 1.5.1 Transformación de trabajo eléctrico a trabajo mecánico por máquina rotativa ................. 41 1.5.2 Transformación de trabajo eléctrico a trabajo mecánico por piezoelectricidad ................. 45 1.5.3 Transformación de radiación a calor .................................................................................. 46 1.5.4 Transformación de radiación a trabajo eléctrico ................................................................ 49 1.5.5 Transformación de calor a trabajo eléctrico ....................................................................... 50 1.5.6 Transformación de calor a trabajo mecánico ..................................................................... 56 El motor térmico. Integración de transformadores A/F y F/F ..................................................... 59 1.6.1 Motores endotérmicos frente a motores exotérmicos ........................................................ 59 1.6.2 Motores térmicos para generación con cogeneración ...................................................... 61 1.6.3 Motores térmicos para tracción con y sin eje de salida ..................................................... 62 2 Ciclos termodinámicos 2.1 2.2 Introducción .............................................................................................................................. 65 Análisis y caracterización de un ciclo termodinámico de trabajo .............................................. 67 2.2.1 Procesos de evolución ....................................................................................................... 67 © Los autores, 2002; © Edicions UPC, 2002. 10 2.3 2.4 3 3.1 3.2 3.3 3.4 3.5 3.6 3.7 3.8. Máquinas térmicas motoras 2.2.2Diagramas P/V y T/S ........................................................................................................... 70 2.2.3 Presión media teórica ......................................................................................................... 72 Ciclos de referencia .................................................................................................................... 74 2.3.1 Ciclo de Carnot ................................................................................................................... 75 2.3.2 Ciclo de Lenoir ................................................................................................................... 78 2.3.3 Ciclo Otto ........................................................................................................................... 79 2.3.4 Ciclo Diesel ........................................................................................................................ 82 2.3.5 Ciclo mixto de Sabathé ....................................................................................................... 85 2.3.6 Ciclo Atkinson .................................................................................................................... 88 2.3.7 Ciclo Brayton ..................................................................................................................... 92 2.3.8 Ciclo Ericsson ..................................................................................................................... 95 2.3.9 Ciclo Stirling ....................................................................................................................... 97 Caracterización del ciclo teórico asociado a un mecanismo. Modelización numérica. ............... 99 El motor alternativo de combustión interna Introducción ............................................................................................................................. 107 Principios de funcionamiento ................................................................................................... 112 3.2.1 Concepción de la fase cerrada ......................................................................................... 120 3.2.2 Concepción de la fase abierta .......................................................................................... 122 3.2.3 Tipología de refrigeración ................................................................................................ 124 3.2.4 Arquitecturas policilíndricas ............................................................................................ 126 Parámetros característicos ........................................................................................................ 131 3.3.1 Parámetros dimensionales ................................................................................................ 131 3.3.2 Relaciones entre parámetros dimensionales .................................................................... 133 3.3.3 Parámetros termodinámicos ............................................................................................. 135 3.3.4 Características operativas del motor ................................................................................ 137 Fase Cerrada ............................................................................................................................. 140 3.4.1 La combustión en los MEP .............................................................................................. 141 3.4.2 Aportación de combustible en los MEP .......................................................................... 148 3.4.3 Sistema de encendido en los MEP ................................................................................... 155 3.4.4 La combustión de los MEC .............................................................................................. 161 3.4.5 Aportación de combustible de los MEC .......................................................................... 168 3.4.6 Comparación entre los MEP y los MEC ........................................................................... 177 Fase Abierta .............................................................................................................................. 179 3.5.1 Renovación de la carga en motores de 4 tiempos ............................................................ 184 3.5.2 Sobrealimentación ............................................................................................................ 192 3.5.3 Renovación de la carga en motores de 2 tiempos ............................................................ 199 3.5.4 Comparación entre motores de 4 y 2 tiempos .................................................................. 208 Sistemas auxiliares .................................................................................................................... 209 3.6.1 Sistema de refrigeración ................................................................................................... 210 3.6.2 Sistema de lubricación ..................................................................................................... 213 Prestaciones .............................................................................................................................. 215 3.7.1 Curvas características ...................................................................................................... 215 3.7.2 Regulación del par motor ................................................................................................. 219 Emisiones contaminantes ......................................................................................................... 220 © Los autores, 2002; © Edicions UPC, 2002. Indice 11 3.9 3.8.1 Generación de contaminantes .......................................................................................... 220 3.8.2 Sistemas de reducción de contaminantes ........................................................................ 223 Combustibles para motores alternativos .................................................................................. 226 4 El motor Wankel 4.1 4.2 4.3 Introducción ............................................................................................................................. 233 Principios de funcionamiento ................................................................................................... 235 Geometría del motor .................................................................................................................. 239 4.3.1 Descripción del estátor .................................................................................................... 241 4.3.2 Descripción del rotor ....................................................................................................... 243 4.3.3 Cilindrada ......................................................................................................................... 245 4.3.4 Relación de compresión ................................................................................................... 247 4.3.5 Velocidad tangencial y aceleración del rotor ................................................................... 247 Elementos del motor ................................................................................................................. 249 4.4.1 Rotor ................................................................................................................................ 249 4.4.2 Estátor .............................................................................................................................. 250 4.4.3 Engranajes de transmisión ............................................................................................... 253 4.4.4 Mecanismo de sellado ..................................................................................................... 255 Procesos y sistemas ................................................................................................................. 257 4.5.1 Características de la combustión ..................................................................................... 257 4.5.2 Equilibrado del rotor ........................................................................................................ 259 4.5.3 Refrigeración del estátor .................................................................................................. 260 4.5.4 Refrigeración del rotor ..................................................................................................... 261 4.5.5 Sistema de distribución .................................................................................................... 262 4.5.6 Sistema de lubricación ..................................................................................................... 263 4.5.7 Encendido doble .............................................................................................................. 264 4.5.8 Inyección de gasolina ...................................................................................................... 266 4.4 4.5 5 5.1 5.2 5.3 5.4 5.5 Motores de autopropulsión Introducción ............................................................................................................................. 267 Principios de funcionamiento ................................................................................................... 270 5.2.1 Propulsión a reacción ....................................................................................................... 271 5.2.2 Ecuación fundamental de la astronáutica ........................................................................ 273 Cámara de combustión ............................................................................................................. 274 5.3.1 Concepción de la combustión .......................................................................................... 275 5.3.2 Sistema de refrigeración ................................................................................................... 276 5.3.3 Estudio termodinámico de la cámara ................................................................................ 277 Tobera ....................................................................................................................................... 279 5.4.1 Perfil de la tobera ............................................................................................................. 279 5.4.2 Tipos de toberas .............................................................................................................. 281 5.4.3 Caracterización termodinámica de la tobera ..................................................................... 281 Motor químico .......................................................................................................................... 285 5.5.1 Motor químico de combustible sólido ............................................................................. 285 5.5.2 Motor químico de combustible líquido ............................................................................ 291 © Los autores, 2002; © Edicions UPC, 2002. 12 Máquinas térmicas motoras 5.8 5.5.3 Comparación entre propelentes sólidos y líquidos .......................................................... 294 5.5.4 Motor químico híbrido ..................................................................................................... 294 Propulsión nuclear .................................................................................................................... 295 Propulsión eléctrica .................................................................................................................. 295 5.7.1 Motores eléctricos ........................................................................................................... 295 5.7.2 Cohetes con sistema de aceleración eléctrico .................................................................. 295 El efecto Pogo ........................................................................................................................... 296 6 Turbina de gas 5.6 5.7 6.1 6.2 6.3 6.4 6.5 6.6 6.7 6.8 Introducción ............................................................................................................................. 299 Tipos de turbinas de gas ........................................................................................................... 301 6.2.1 Tipo de ciclo termodinámico ............................................................................................ 301 6.2.2 Aportación de energía al ciclo .......................................................................................... 303 6.2.3 Disposiciones mecánicas ................................................................................................. 303 Ciclos para la obtención de potencia en una turbina de gas ..................................................... 305 6.3.1 Ciclo de Brayton ............................................................................................................... 305 6.3.2 Ciclo de Brayton regenerativo ......................................................................................... 308 6.3.3 Ciclo con recalentamiento ................................................................................................ 308 6.3.4 Ciclo con enfriamiento intermedio en la compresión ....................................................... 309 Compresor ................................................................................................................................. 309 6.4.1 Compresor centrífugo ...................................................................................................... 312 6.4.2 Compresor axial ................................................................................................................ 314 Cámara de combustión ............................................................................................................. 320 6.5.1 Tipologías de cámaras de combustión ............................................................................ 323 6.5.2 Estabilidad de llama en la cámara de combustión ............................................................ 325 6.5.3 Intensidad de la combustión ............................................................................................ 326 6.5.4 Aportación de combustible .............................................................................................. 327 6.5.5 Sistemas de ignición ........................................................................................................ 329 6.5.6 Arranque de la turbina de gas .......................................................................................... 329 Turbina ...................................................................................................................................... 330 6.6.1 Turbinas de flujo radial .................................................................................................... 331 6.6.2 Turbinas de flujo axial ...................................................................................................... 331 Turbinas de gas para la propulsión de aviones ........................................................................ 336 6.7.1 El turborreactor ................................................................................................................ 337 6.7.2 El turboventilador ............................................................................................................. 338 6.7.3 El turbohélice o turboeje .................................................................................................. 340 6.7.4 Influencia de la velocidad del avión ................................................................................ 341 6.7.5 Inversores de empuje ....................................................................................................... 344 6.7.6 Contaminación acústica ................................................................................................... 346 Regulación de la potencia ......................................................................................................... 347 6.8.1 Unidades de un solo eje reguladas por la temperatura, a velocidad constante ............... 347 6.8.2 Unidades de un solo eje reguladas por la variación de la velocidad, a temperatura cons .... tante .................................................................................................................................. 348 6.8.3 Unidades de un solo eje reguladas por la variación de la velocidad y la temperatura .... 349 6.8.4 Regulación de unidades de dos ejes o eje partido ........................................................... 350 © Los autores, 2002; © Edicions UPC, 2002. Indice 13 7 Instalación de turbinas de vapor 7.1 7.2 7.5 Introducción ............................................................................................................................. 353 Ciclos para la obtención de potencia en una instalación de turbinas de vapor ........................ 355 7.2.1 Propiedades del vapor ..................................................................................................... 355 7.2.2 Ciclo de Rankine ideal ...................................................................................................... 358 7.2.3 Ciclo de Rankine real, rendimiento isoentrópico .............................................................. 359 7.2.4 Ciclo de Rankine con sobrecalentamiento ....................................................................... 360 7.2.5 Ciclo de Rankine con recalentamiento intermedio ........................................................... 362 7.2.6 Ciclo de Rankine con regeneración .................................................................................. 363 7.2.7 Ciclo de Rankine supercrítico ........................................................................................... 364 Turbinas de vapor ..................................................................................................................... 365 7.3.1 Descripción ...................................................................................................................... 365 7.3.2 Tipologías de turbinas de vapor ...................................................................................... 367 7.3.3 Principio de funcionamiento ............................................................................................ 370 7.3.4 Materiales ......................................................................................................................... 382 Calderas .................................................................................................................................... 382 7.4.1 Descripción ...................................................................................................................... 382 7.4.2 Tipologías de calderas ..................................................................................................... 384 7.4.3 Combustibles para calderas de vapor .............................................................................. 389 Condensador y bomba de presión ............................................................................................. 389 8 Motor Stirling 8.1 8.2 8.3 Introducción ............................................................................................................................. 391 Funcionamiento del motor Stirling ........................................................................................... 392 Ciclos termodinámicos ideales .................................................................................................. 395 8.3.1 Importancia de la evolución isotérmica respecto a la adiabática ..................................... 396 8.3.2 Ciclo de Rallis ................................................................................................................... 399 8.3.3 Ciclo Stirling ..................................................................................................................... 405 8.3.4 Ciclo Ericsson ................................................................................................................... 410 8.3.5 Ciclo mixto Stirling-Rallis ................................................................................................. 411 Análisis comparativo entre ciclos ............................................................................................. 415 8.4.1 Análisis de la relación de compresión .............................................................................. 415 8.4.2 Análisis del salto térmico ................................................................................................. 418 8.4.3 Correlación entre variables .............................................................................................. 421 Influencias del mecanismo en el ciclo termodinámico .............................................................. 421 Regenerador .............................................................................................................................. 423 8.6.1 Análisis de la regeneración .............................................................................................. 423 8.6.2 Regenerador único ........................................................................................................... 424 8.6.3 Regeneradores en serie .................................................................................................... 427 Elementos mecánicos ............................................................................................................... 428 8.7.1 Tipologías de motores ..................................................................................................... 428 8.7.2 Tipologías de arquitecturas ............................................................................................. 429 8.7.3 Acoplamiento de los émbolos y extracción de potencia .................................................. 433 8.7.4 Elementos de estanqueidad y lubricación ....................................................................... 436 7.3 7.4. 8.4 8.5 8.6 8.7 © Los autores, 2002; © Edicions UPC, 2002. 14 Máquinas térmicas motoras 8.7.5 Características de los elementos mecánicos .................................................................... 437 Elementos térmicos ................................................................................................................... 437 8.8.1 Calentadores .................................................................................................................... 441 8.8.2 Refrigeradores .................................................................................................................. 443 8.9 Fluidos de trabajo ..................................................................................................................... 444 8.9.1 Fluidos de trabajo gaseosos ............................................................................................ 444 8.9.2 Fluidos de trabajo líquidos .............................................................................................. 451 8.9.3 Fluidos de trabajo con cambio de fase ............................................................................ 452 8.9.4 Fluidos de trabajo químicamente reactivos ...................................................................... 454 8.10 Características de funcionamiento ........................................................................................... 454 8.10.1 Curvas características .................................................................................................... 454 8.10.2 Contaminación y ruido ................................................................................................... 460 8.11 Sistemas de control .................................................................................................................. 461 8.11.1 Variación de la temperatura ............................................................................................ 463 8.11.2 Variación de la presión media del fluido de trabajo ........................................................ 463 8.11.3 Variación de la amplitud de la presión ............................................................................ 465 8.11.4 Variación del ángulo de fase ........................................................................................... 465 8.11.5 Variación de la carrera .................................................................................................... 465 8.8 9 9.1 9.2 9.3 9.4 9.5 9.6 Cogeneración Introducción ............................................................................................................................. 467 Tipologías de cogeneración ..................................................................................................... 469 9.2.1 Cogeneración con turbinas de gas .................................................................................. 471 9.2.2 Cogeneración con turbinas de vapor ............................................................................... 472 9.2.3 Cogeneración con motores alternativos de combustión interna ..................................... 473 9.2.4 Cogeneración mediante ciclos combinados ..................................................................... 474 9.2.5 Otras tecnologías de cogeneración .................................................................................. 475 9.2.6 Campos de aplicación ...................................................................................................... 475 Caracterización y evaluación de instalaciones de cogeneración ............................................. 476 9.3.1 Rendimientos ................................................................................................................... 476 9.3.2 Coeficientes para caracterizar las instalaciones de cogeneración ................................... 478 9.3.3 Ahorro de combustible .................................................................................................... 479 Instalaciones de generación de potencia mediante ciclos combinados ................................... 480 9.4.1 Caracterización del ciclo combinado ................................................................................ 480 9.4.2 Análisis termodinámico .................................................................................................... 482 Aspectos económicos de la cogeneración ............................................................................... 485 9.5.1 Asignación de costes ....................................................................................................... 485 9.5.2 Ahorro económico ............................................................................................................ 486 9.5.3 Estudios de viabilidad ...................................................................................................... 486 Evaluación de las distintas posibilidades de cogeneración en un caso real ............................ 487 9.6.1 Características de la instalación sin cogeneración .......................................................... 487 9.6.2 Aspectos previos a considerar ........................................................................................ 490 9.6.3 Alternativa 1: Ciclo combinado con turbina de vapor ..................................................... 491 9.6.4 Alternativa 2: Ciclo combinado con turbina de vapor y turbina de gas .......................... 497 9.6.5 Alternativa 3: Ciclo combinado con turbina de gas ......................................................... 500 © Los autores, 2002; © Edicions UPC, 2002. Indice 15 9.6.6 Alternativa 4: Ciclo combinado con turbina de gas y turbina de vapor y generación de frío por absorción (trigeneración) ........................................................................................... 502 9.6.7 Comparación de las diferentes alternativas ..................................................................... 507 10 Pilas de combustible 10.1 Introducción ............................................................................................................................. 509 10.2 Principios de funcionamiento ................................................................................................... 510 10.2.1 Electrodos ...................................................................................................................... 512 10.2.2 Membrana-Electrolito ..................................................................................................... 512 10.2.3 Capa de apoyo ................................................................................................................ 512 10.3 Prestaciones ............................................................................................................................. 512 10.3.1 Cálculo de prestaciones ideales ..................................................................................... 513 10.3.2 Cálculo de las pérdidas .................................................................................................. 514 10.3.3 Variables en el comportamiento de una pila de combustible .......................................... 516 10.3.4 Rendimiento ................................................................................................................... 517 10.4 Tipos de pilas de combustibles ................................................................................................ 518 10.4.1 Pilas alcalinas (AFC) ...................................................................................................... 519 10.4.2 Pilas de membrana polimérica (PEM) ............................................................................. 521 10.4.3 Pilas de ácido fosfórico (PAFC) ..................................................................................... 523 10.4.4 Pilas de carbonato fundido (MCFC) .............................................................................. 526 10.4.5 Pilas de óxido sólido (SOFC) .......................................................................................... 527 10.4.6 Comparación de los tipos de pilas de combustible ........................................................ 528 10.5 Combustibles ............................................................................................................................ 529 Bibliografía ........................................................................................................................... 531 © Los autores, 2002; © Edicions UPC, 2002. POLITEXT 135 Máquinas térmicas motoras - 2 POLITEXT Jesús Andrés Álvarez Flórez, ed. Ismael Callejón Agramunt, ed. Sergi Forns Farrús Pere Roca Carles David Balsells Grande Juan Casanova Rossell Tomás Navarro Odriozola Carles Forcadell Freixa Angelita González Fontal Antoni Márquez Luque Francisco J. Pérez Llopis Máquinas térmicas motoras - 2 EDICIONS UPC La presente obra fue galardonada en el octavo concurso "Ajut a l'elaboració de material docent" convocado por la UPC. Colaboradores: Mònica Álvarez, Francesc Batalla, Gabriela Benveniste, Òscar Bonet, Xavier Carrera, Juan Manuel Castro, Òscar Civit, Jordi Escura, Irene Espada, Xavier Flores, David González, Ricard Ibáñez, Andreu Iglesias, Luis Isidro, Josep Antón Jiménez, Oscar Jiménez, Francisco Liesa, Ana Mª Marimón, Salvador Miret, Eduard Moreno, Josep Mª Piguillem, Julio Pérez, Lluc Puig, Eloi Robert, Joan Rovira, Bartolomé Salom, David Sánchez, Álvaro Serrano, Xavier Soldevila, Agustí Vilella, Joaquin Villa, Jordi Yubero Primera edición: septiembre de 2002 Diseño de la cubierta: Manuel Andreu © Los autores, 2002 © Edicions UPC, 2002 Edicions de la Universitat Politècnica de Catalunya, SL Jordi Girona Salgado 31, 08034 Barcelona Tel.: 934 016 883 Fax: 934 015 885 Edicions Virtuals: www.edicionsupc.es E-mail: edicions-upc@upc.es Producción: Copistería Miracle, SL Rector Ubach 6-10, 08021 Barcelona Depósito legal: B-27730-2002 ISBN: 84-8301-645-1 ISBN Obra completa: 84-8301-646-X Quedan rigurosamente prohibidas, sin la autorización escrita de los titulares del copyright, bajo las sanciones establecidas en las leyes, la reproducción total o parcial de esta obra por cualquier medio o procedimiento, comprendidos la reprografía y el tratamiento informático, y la distribución de ejemplares de ella mediante alquiler o préstamo públicos. Prólogo 7 Prólogo Esta obra ha sido realizada en el Laboratori de Motors Tèrmics de la Escola Tècnica Superior dEnginyeria de Barcelona de la Universitat Politècnica de Catalunya conjuntamente con el CREMIT, el Centre de Recerca de Motors i Instal·lacions Tèrmiques de la Xarxa de Innovació Tecnológica de la Generalitat de Catalunya. Su inicio se remonta a 1994, año en el que se inició experimentalmente un nueva metodología docente de la asignatura de Motores Térmicos de la titulación de Ingeniería Industrial, en la que, de forma prioritaria, se potenciaba la participación del alumno en su propio proceso formativo mediante un método basado en el autoaprendizaje tutelado. Gracias al grado de madurez y predisposición de los alumnos fue generándose una amplia base documental formada por trabajos escritos del ámbito de los motores térmicos, la calidad de aquellos trabajos tutelados representaron, de forma parcial, un primer esbozo embrionario de este libro. Estos primeros resultados animaron a definir una estrategia, a largo plazo, para la generación de una base documental propia que se apoyase en los distintos trabajos de investigación realizados y se articulase mediante los proyectos de final de carrera de nuestros alumnos. La base documental establecida, convenientemente revisada, ampliada y actualizada y mediante la ayuda otorgada por la Universitat Politècnia de Catalunya para la realización de la misma, ha concluido en el presente libro de Máquinas térmicas motoras, que ha sido concebido para aportar al lector una visión general de las diferentes y posibles máquinas térmicas motoras existentes, al objeto de cubrir necesidades bibliográficas básicas para el seguimiento de la asignatura de Ingeniería y Máquinas Térmicas, que se imparte en las Escuelas de Ingeniería Industrial. El objetivo principal de la obra es ofrecer una visión horizontal de las distintas tipologías de motores térmicos empleados en la actualidad, aglutinando y homogeneizando las dispersas fuentes escritas existentes. El primer capítulo constituye una reflexión sobre la transferencia de energía, a partir del concepto de acumulador de energía y de flujo energético. Esta diferenciación es esencial para poder valorar adecuadamente los rendimientos implicados en las distintas transformaciones de energía que conllevan el rendimiento global de un determinado uso. La definición de un ámbito global en el que se implementan las diferentes máquinas transformadoras de energía permite establecer y contextualizar la importancia de las máquinas térmicas y los ciclos termodinámicos como base del aprovechamiento actual de las fuentes energéticas disponibles . © Los autores, 2002; © Edicions UPC, 2002. © Los autores, 2002; © Edicions UPC, 2002. Indice 9 Indice 1 1.1 1.2 1.3 1.4 1.5 1.6 Transferencia de energía Introducción .............................................................................................................................. 17 Análisis de la transformación de energía ................................................................................... 19 1.2.1 Tipos de acumulador ......................................................................................................... 20 1.2.2 Tipos de flujo de energía ................................................................................................... 21 1.2.3 Proceso de transformación ................................................................................................ 22 Fuentes de energía ..................................................................................................................... 24 1.3.1 Energía solar ....................................................................................................................... 24 1.3.2 Energía nuclear ................................................................................................................... 25 1.3.3 Interacción gravitatoria ...................................................................................................... 25 1.3.4 Energía geotérmica ............................................................................................................. 27 Transformadores de acumulador a flujo de energía (A/F) .......................................................... 27 1.4.1 Transformación de energía térmica a calor ........................................................................ 27 1.4.2 Transformación de energía química a calor ........................................................................ 30 1.4.3 Transformación de energía nuclear a calor ........................................................................ 33 1.4.4 Transformación de energía química a trabajo eléctrico ...................................................... 37 1.4.5 Transformación de energía dinámica a trabajo mecánico .................................................. 38 Transformadores de flujo ........................................................................................................... 40 1.5.1 Transformación de trabajo eléctrico a trabajo mecánico por máquina rotativa ................. 41 1.5.2 Transformación de trabajo eléctrico a trabajo mecánico por piezoelectricidad ................. 45 1.5.3 Transformación de radiación a calor .................................................................................. 46 1.5.4 Transformación de radiación a trabajo eléctrico ................................................................ 49 1.5.5 Transformación de calor a trabajo eléctrico ....................................................................... 50 1.5.6 Transformación de calor a trabajo mecánico ..................................................................... 56 El motor térmico. Integración de transformadores A/F y F/F ..................................................... 59 1.6.1 Motores endotérmicos frente a motores exotérmicos ........................................................ 59 1.6.2 Motores térmicos para generación con cogeneración ...................................................... 61 1.6.3 Motores térmicos para tracción con y sin eje de salida ..................................................... 62 2 Ciclos termodinámicos 2.1 2.2 Introducción .............................................................................................................................. 65 Análisis y caracterización de un ciclo termodinámico de trabajo .............................................. 67 2.2.1 Procesos de evolución ....................................................................................................... 67 © Los autores, 2002; © Edicions UPC, 2002. 10 2.3 2.4 3 3.1 3.2 3.3 3.4 3.5 3.6 3.7 3.8. Máquinas térmicas motoras 2.2.2Diagramas P/V y T/S ........................................................................................................... 70 2.2.3 Presión media teórica ......................................................................................................... 72 Ciclos de referencia .................................................................................................................... 74 2.3.1 Ciclo de Carnot ................................................................................................................... 75 2.3.2 Ciclo de Lenoir ................................................................................................................... 78 2.3.3 Ciclo Otto ........................................................................................................................... 79 2.3.4 Ciclo Diesel ........................................................................................................................ 82 2.3.5 Ciclo mixto de Sabathé ....................................................................................................... 85 2.3.6 Ciclo Atkinson .................................................................................................................... 88 2.3.7 Ciclo Brayton ..................................................................................................................... 92 2.3.8 Ciclo Ericsson ..................................................................................................................... 95 2.3.9 Ciclo Stirling ....................................................................................................................... 97 Caracterización del ciclo teórico asociado a un mecanismo. Modelización numérica. ............... 99 El motor alternativo de combustión interna Introducción ............................................................................................................................. 107 Principios de funcionamiento ................................................................................................... 112 3.2.1 Concepción de la fase cerrada ......................................................................................... 120 3.2.2 Concepción de la fase abierta .......................................................................................... 122 3.2.3 Tipología de refrigeración ................................................................................................ 124 3.2.4 Arquitecturas policilíndricas ............................................................................................ 126 Parámetros característicos ........................................................................................................ 131 3.3.1 Parámetros dimensionales ................................................................................................ 131 3.3.2 Relaciones entre parámetros dimensionales .................................................................... 133 3.3.3 Parámetros termodinámicos ............................................................................................. 135 3.3.4 Características operativas del motor ................................................................................ 137 Fase Cerrada ............................................................................................................................. 140 3.4.1 La combustión en los MEP .............................................................................................. 141 3.4.2 Aportación de combustible en los MEP .......................................................................... 148 3.4.3 Sistema de encendido en los MEP ................................................................................... 155 3.4.4 La combustión de los MEC .............................................................................................. 161 3.4.5 Aportación de combustible de los MEC .......................................................................... 168 3.4.6 Comparación entre los MEP y los MEC ........................................................................... 177 Fase Abierta .............................................................................................................................. 179 3.5.1 Renovación de la carga en motores de 4 tiempos ............................................................ 184 3.5.2 Sobrealimentación ............................................................................................................ 192 3.5.3 Renovación de la carga en motores de 2 tiempos ............................................................ 199 3.5.4 Comparación entre motores de 4 y 2 tiempos .................................................................. 208 Sistemas auxiliares .................................................................................................................... 209 3.6.1 Sistema de refrigeración ................................................................................................... 210 3.6.2 Sistema de lubricación ..................................................................................................... 213 Prestaciones .............................................................................................................................. 215 3.7.1 Curvas características ...................................................................................................... 215 3.7.2 Regulación del par motor ................................................................................................. 219 Emisiones contaminantes ......................................................................................................... 220 © Los autores, 2002; © Edicions UPC, 2002. Indice 11 3.9 3.8.1 Generación de contaminantes .......................................................................................... 220 3.8.2 Sistemas de reducción de contaminantes ........................................................................ 223 Combustibles para motores alternativos .................................................................................. 226 4 El motor Wankel 4.1 4.2 4.3 Introducción ............................................................................................................................. 233 Principios de funcionamiento ................................................................................................... 235 Geometría del motor .................................................................................................................. 239 4.3.1 Descripción del estátor .................................................................................................... 241 4.3.2 Descripción del rotor ....................................................................................................... 243 4.3.3 Cilindrada ......................................................................................................................... 245 4.3.4 Relación de compresión ................................................................................................... 247 4.3.5 Velocidad tangencial y aceleración del rotor ................................................................... 247 Elementos del motor ................................................................................................................. 249 4.4.1 Rotor ................................................................................................................................ 249 4.4.2 Estátor .............................................................................................................................. 250 4.4.3 Engranajes de transmisión ............................................................................................... 253 4.4.4 Mecanismo de sellado ..................................................................................................... 255 Procesos y sistemas ................................................................................................................. 257 4.5.1 Características de la combustión ..................................................................................... 257 4.5.2 Equilibrado del rotor ........................................................................................................ 259 4.5.3 Refrigeración del estátor .................................................................................................. 260 4.5.4 Refrigeración del rotor ..................................................................................................... 261 4.5.5 Sistema de distribución .................................................................................................... 262 4.5.6 Sistema de lubricación ..................................................................................................... 263 4.5.7 Encendido doble .............................................................................................................. 264 4.5.8 Inyección de gasolina ...................................................................................................... 266 4.4 4.5 5 5.1 5.2 5.3 5.4 5.5 Motores de autopropulsión Introducción ............................................................................................................................. 267 Principios de funcionamiento ................................................................................................... 270 5.2.1 Propulsión a reacción ....................................................................................................... 271 5.2.2 Ecuación fundamental de la astronáutica ........................................................................ 273 Cámara de combustión ............................................................................................................. 274 5.3.1 Concepción de la combustión .......................................................................................... 275 5.3.2 Sistema de refrigeración ................................................................................................... 276 5.3.3 Estudio termodinámico de la cámara ................................................................................ 277 Tobera ....................................................................................................................................... 279 5.4.1 Perfil de la tobera ............................................................................................................. 279 5.4.2 Tipos de toberas .............................................................................................................. 281 5.4.3 Caracterización termodinámica de la tobera ..................................................................... 281 Motor químico .......................................................................................................................... 285 5.5.1 Motor químico de combustible sólido ............................................................................. 285 5.5.2 Motor químico de combustible líquido ............................................................................ 291 © Los autores, 2002; © Edicions UPC, 2002. 12 Máquinas térmicas motoras 5.8 5.5.3 Comparación entre propelentes sólidos y líquidos .......................................................... 294 5.5.4 Motor químico híbrido ..................................................................................................... 294 Propulsión nuclear .................................................................................................................... 295 Propulsión eléctrica .................................................................................................................. 295 5.7.1 Motores eléctricos ........................................................................................................... 295 5.7.2 Cohetes con sistema de aceleración eléctrico .................................................................. 295 El efecto Pogo ........................................................................................................................... 296 6 Turbina de gas 5.6 5.7 6.1 6.2 6.3 6.4 6.5 6.6 6.7 6.8 Introducción ............................................................................................................................. 299 Tipos de turbinas de gas ........................................................................................................... 301 6.2.1 Tipo de ciclo termodinámico ............................................................................................ 301 6.2.2 Aportación de energía al ciclo .......................................................................................... 303 6.2.3 Disposiciones mecánicas ................................................................................................. 303 Ciclos para la obtención de potencia en una turbina de gas ..................................................... 305 6.3.1 Ciclo de Brayton ............................................................................................................... 305 6.3.2 Ciclo de Brayton regenerativo ......................................................................................... 308 6.3.3 Ciclo con recalentamiento ................................................................................................ 308 6.3.4 Ciclo con enfriamiento intermedio en la compresión ....................................................... 309 Compresor ................................................................................................................................. 309 6.4.1 Compresor centrífugo ...................................................................................................... 312 6.4.2 Compresor axial ................................................................................................................ 314 Cámara de combustión ............................................................................................................. 320 6.5.1 Tipologías de cámaras de combustión ............................................................................ 323 6.5.2 Estabilidad de llama en la cámara de combustión ............................................................ 325 6.5.3 Intensidad de la combustión ............................................................................................ 326 6.5.4 Aportación de combustible .............................................................................................. 327 6.5.5 Sistemas de ignición ........................................................................................................ 329 6.5.6 Arranque de la turbina de gas .......................................................................................... 329 Turbina ...................................................................................................................................... 330 6.6.1 Turbinas de flujo radial .................................................................................................... 331 6.6.2 Turbinas de flujo axial ...................................................................................................... 331 Turbinas de gas para la propulsión de aviones ........................................................................ 336 6.7.1 El turborreactor ................................................................................................................ 337 6.7.2 El turboventilador ............................................................................................................. 338 6.7.3 El turbohélice o turboeje .................................................................................................. 340 6.7.4 Influencia de la velocidad del avión ................................................................................ 341 6.7.5 Inversores de empuje ....................................................................................................... 344 6.7.6 Contaminación acústica ................................................................................................... 346 Regulación de la potencia ......................................................................................................... 347 6.8.1 Unidades de un solo eje reguladas por la temperatura, a velocidad constante ............... 347 6.8.2 Unidades de un solo eje reguladas por la variación de la velocidad, a temperatura cons .... tante .................................................................................................................................. 348 6.8.3 Unidades de un solo eje reguladas por la variación de la velocidad y la temperatura .... 349 6.8.4 Regulación de unidades de dos ejes o eje partido ........................................................... 350 © Los autores, 2002; © Edicions UPC, 2002. Indice 13 7 Instalación de turbinas de vapor 7.1 7.2 7.5 Introducción ............................................................................................................................. 353 Ciclos para la obtención de potencia en una instalación de turbinas de vapor ........................ 355 7.2.1 Propiedades del vapor ..................................................................................................... 355 7.2.2 Ciclo de Rankine ideal ...................................................................................................... 358 7.2.3 Ciclo de Rankine real, rendimiento isoentrópico .............................................................. 359 7.2.4 Ciclo de Rankine con sobrecalentamiento ....................................................................... 360 7.2.5 Ciclo de Rankine con recalentamiento intermedio ........................................................... 362 7.2.6 Ciclo de Rankine con regeneración .................................................................................. 363 7.2.7 Ciclo de Rankine supercrítico ........................................................................................... 364 Turbinas de vapor ..................................................................................................................... 365 7.3.1 Descripción ...................................................................................................................... 365 7.3.2 Tipologías de turbinas de vapor ...................................................................................... 367 7.3.3 Principio de funcionamiento ............................................................................................ 370 7.3.4 Materiales ......................................................................................................................... 382 Calderas .................................................................................................................................... 382 7.4.1 Descripción ...................................................................................................................... 382 7.4.2 Tipologías de calderas ..................................................................................................... 384 7.4.3 Combustibles para calderas de vapor .............................................................................. 389 Condensador y bomba de presión ............................................................................................. 389 8 Motor Stirling 8.1 8.2 8.3 Introducción ............................................................................................................................. 391 Funcionamiento del motor Stirling ........................................................................................... 392 Ciclos termodinámicos ideales .................................................................................................. 395 8.3.1 Importancia de la evolución isotérmica respecto a la adiabática ..................................... 396 8.3.2 Ciclo de Rallis ................................................................................................................... 399 8.3.3 Ciclo Stirling ..................................................................................................................... 405 8.3.4 Ciclo Ericsson ................................................................................................................... 410 8.3.5 Ciclo mixto Stirling-Rallis ................................................................................................. 411 Análisis comparativo entre ciclos ............................................................................................. 415 8.4.1 Análisis de la relación de compresión .............................................................................. 415 8.4.2 Análisis del salto térmico ................................................................................................. 418 8.4.3 Correlación entre variables .............................................................................................. 421 Influencias del mecanismo en el ciclo termodinámico .............................................................. 421 Regenerador .............................................................................................................................. 423 8.6.1 Análisis de la regeneración .............................................................................................. 423 8.6.2 Regenerador único ........................................................................................................... 424 8.6.3 Regeneradores en serie .................................................................................................... 427 Elementos mecánicos ............................................................................................................... 428 8.7.1 Tipologías de motores ..................................................................................................... 428 8.7.2 Tipologías de arquitecturas ............................................................................................. 429 8.7.3 Acoplamiento de los émbolos y extracción de potencia .................................................. 433 8.7.4 Elementos de estanqueidad y lubricación ....................................................................... 436 7.3 7.4. 8.4 8.5 8.6 8.7 © Los autores, 2002; © Edicions UPC, 2002. 14 Máquinas térmicas motoras 8.7.5 Características de los elementos mecánicos .................................................................... 437 Elementos térmicos ................................................................................................................... 437 8.8.1 Calentadores .................................................................................................................... 441 8.8.2 Refrigeradores .................................................................................................................. 443 8.9 Fluidos de trabajo ..................................................................................................................... 444 8.9.1 Fluidos de trabajo gaseosos ............................................................................................ 444 8.9.2 Fluidos de trabajo líquidos .............................................................................................. 451 8.9.3 Fluidos de trabajo con cambio de fase ............................................................................ 452 8.9.4 Fluidos de trabajo químicamente reactivos ...................................................................... 454 8.10 Características de funcionamiento ........................................................................................... 454 8.10.1 Curvas características .................................................................................................... 454 8.10.2 Contaminación y ruido ................................................................................................... 460 8.11 Sistemas de control .................................................................................................................. 461 8.11.1 Variación de la temperatura ............................................................................................ 463 8.11.2 Variación de la presión media del fluido de trabajo ........................................................ 463 8.11.3 Variación de la amplitud de la presión ............................................................................ 465 8.11.4 Variación del ángulo de fase ........................................................................................... 465 8.11.5 Variación de la carrera .................................................................................................... 465 8.8 9 9.1 9.2 9.3 9.4 9.5 9.6 Cogeneración Introducción ............................................................................................................................. 467 Tipologías de cogeneración ..................................................................................................... 469 9.2.1 Cogeneración con turbinas de gas .................................................................................. 471 9.2.2 Cogeneración con turbinas de vapor ............................................................................... 472 9.2.3 Cogeneración con motores alternativos de combustión interna ..................................... 473 9.2.4 Cogeneración mediante ciclos combinados ..................................................................... 474 9.2.5 Otras tecnologías de cogeneración .................................................................................. 475 9.2.6 Campos de aplicación ...................................................................................................... 475 Caracterización y evaluación de instalaciones de cogeneración ............................................. 476 9.3.1 Rendimientos ................................................................................................................... 476 9.3.2 Coeficientes para caracterizar las instalaciones de cogeneración ................................... 478 9.3.3 Ahorro de combustible .................................................................................................... 479 Instalaciones de generación de potencia mediante ciclos combinados ................................... 480 9.4.1 Caracterización del ciclo combinado ................................................................................ 480 9.4.2 Análisis termodinámico .................................................................................................... 482 Aspectos económicos de la cogeneración ............................................................................... 485 9.5.1 Asignación de costes ....................................................................................................... 485 9.5.2 Ahorro económico ............................................................................................................ 486 9.5.3 Estudios de viabilidad ...................................................................................................... 486 Evaluación de las distintas posibilidades de cogeneración en un caso real ............................ 487 9.6.1 Características de la instalación sin cogeneración .......................................................... 487 9.6.2 Aspectos previos a considerar ........................................................................................ 490 9.6.3 Alternativa 1: Ciclo combinado con turbina de vapor ..................................................... 491 9.6.4 Alternativa 2: Ciclo combinado con turbina de vapor y turbina de gas .......................... 497 9.6.5 Alternativa 3: Ciclo combinado con turbina de gas ......................................................... 500 © Los autores, 2002; © Edicions UPC, 2002. Indice 15 9.6.6 Alternativa 4: Ciclo combinado con turbina de gas y turbina de vapor y generación de frío por absorción (trigeneración) ........................................................................................... 502 9.6.7 Comparación de las diferentes alternativas ..................................................................... 507 10 Pilas de combustible 10.1 Introducción ............................................................................................................................. 509 10.2 Principios de funcionamiento ................................................................................................... 510 10.2.1 Electrodos ...................................................................................................................... 512 10.2.2 Membrana-Electrolito ..................................................................................................... 512 10.2.3 Capa de apoyo ................................................................................................................ 512 10.3 Prestaciones ............................................................................................................................. 512 10.3.1 Cálculo de prestaciones ideales ..................................................................................... 513 10.3.2 Cálculo de las pérdidas .................................................................................................. 514 10.3.3 Variables en el comportamiento de una pila de combustible .......................................... 516 10.3.4 Rendimiento ................................................................................................................... 517 10.4 Tipos de pilas de combustibles ................................................................................................ 518 10.4.1 Pilas alcalinas (AFC) ...................................................................................................... 519 10.4.2 Pilas de membrana polimérica (PEM) ............................................................................. 521 10.4.3 Pilas de ácido fosfórico (PAFC) ..................................................................................... 523 10.4.4 Pilas de carbonato fundido (MCFC) .............................................................................. 526 10.4.5 Pilas de óxido sólido (SOFC) .......................................................................................... 527 10.4.6 Comparación de los tipos de pilas de combustible ........................................................ 528 10.5 Combustibles ............................................................................................................................ 529 Bibliografía ........................................................................................................................... 531 © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 299 6 Turbinas de gas 6.1 Introducción Una turbina de gas es un motor térmico rotativo de flujo continuo que se caracteriza por presentar una baja relación peso potencia y una velocidad de giro muy elevada. La elevada velocidad de giro, que en función del tamaño puede llegar a alcanzar valores de hasta 40000 revoluciones por minuto, orienta su utilización a una unidad de generación de gases con elevada entalpía que puede utilizarse para propulsión a reacción o puede ser la encargada de accionar una turbina de potencia acoplada a un eje, en la que puede acoplarse cualquier tipo de carga. De este modo la turbina de gas está formada por dos elementos principales: - El generador de gases - La unidad generadora de potencia El generador de gases esta formado a su vez por uno o varios compresores, la cámara de combustión, donde se mezclará el combustible con el aire y donde tendrá lugar la combustión, y finalmente la o las turbinas de expansión de gases, que en este caso sólo obtendrán la potencia necesaria para mover los compresores. La unidad generadora de potencia es donde se obtendrá la potencia útil de la máquina, dependiendo de la aplicación, será otra turbina de expansión de gases, o bien, una tobera de propulsión. En la actualidad, la turbina de gas se utiliza ampliamente, pues es capaz de desarrollar muy elevadas potencias con un tamaño y peso contenidos, aunque sin obtenerse rendimientos muy elevados, del orden del 25% como valores máximos. Las turbinas de gas orientadas a la propulsión a reacción se implementan en la gran mayoría de aviones comerciales y militares (figura 6.1), mientras que las turbinas de gas orientadas a la generación de trabajo en un eje también se han utilizado en buques, trenes, tanques, autobuses, camiones y coches y en los compresores de los gasoductos, pero tienen la utilización prioritaria como generadores de energía eléctrica, bien sea para cubrir las puntas de demanda, gracias a su moderada velocidad de puesta en marcha, bien sea en ciclo combinado con una turbina de vapor para cubrir demandas medianas y con un elevado © Los autores, 2002; © Edicions UPC, 2002. 300 Máquinas térmicas motoras rendimiento u otras configuraciones de cogeneración en las que existe un proceso de elevada necesidad de calor, de modo que el gran caudal de gases de escape, una vez aprovechado en la turbina de potencia, se utiliza para la producción de vapor o el secado de un determinado proceso industrial. Los orígenes de la turbina de gas se remontan a muchos años antes de que el desarrollo tecnológico, tanto de materiales como de procesos industriales, permitiera su correcta implantación. Las limitaciones esenciales provienen de las altas temperaturas de trabajo de los materiales y el correcto equilibrado y articulación del rotor, por el elevado regimen de giro del mismo. Fig.6.1 Motor turborreactor de aviación La primera patente de una turbina de gas la obtiene en 1791 John Barber, pero no es hasta el año 1900 cuando se construye la primera turbina de gas que funcionó realmente, y que fue diseñada en Francia por Stolze, aunque los resultados obtenidos fueron decepcionantes. La aportación de diversos científicos, como Frank Whittle, permitió que en 1939 se construyese el primer avión del mundo propulsado por una turbina de gas, el avión alemán He 178, año en el que también se implementó la primera turbina de gas para la producción de energía eléctrica. Durante la Segunda Guerra Mundial se constató la idoneidad de las turbinas de gas para la propulsión a reacción, aunque el incipiente grado de desarrollo tecnológico y las restricciones de fondos y materiales © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 301 propios de una guerra impidieron una implantación masiva. De forma paralela al desarrollo de las turbinas orientadas a la propulsión a reacción, se fueron desarrollando las turbinas de generación de trabajo en eje, orientadas tanto a la generación como a la propulsión. Desde los inicios hasta la actualidad se han ido mejorando los desarrollos de turbinas para mejorar los materiales, reducir la temperatura de la turbina, obtener los mejores combustibles y mejorar los componentes del ciclo. Se han obtenido mayores prestaciones, fiabilidad y economía, siendo la solución en aquellas aplicaciones de propulsión de elevada potencia y relación peso/potencia y volumen/potencia baja, y en aquellas instalaciones de cogeneración en las que se requiere un elevado caudal de gas de escape. 6.2 Tipos de turbinas de gas Existen múltiples criterios de clasificación de las turbinas de gas, los más importantes de los cuales son: - Tipo de ciclo termodinámico Modo de aportación de energía Disposiciones mecánicas Tipo de aplicación de la turbina de gas 6. 2. 1 Tipo de ciclo termodinámico El ciclo termodinámico que realiza una turbina de gas que se desarrolla en el apartado 6.3 puede diferenciarse en como se modeliza la aportación de calor al ciclo termodinámico: - Aportación de calor a presión constante - Aportación de calor a volumen constante La turbina de gas con aportación de energía a presión constante sigue el esquema básico de la turbina de gas (compresor, cámara de combustión y turbina) y sigue el ciclo de Brayton. En esta aportación, el flujo de gases es constante, y en ningún momento se interrumpe la vena fluida. Esta disposición es la más utilizada, ya que permite un funcionamiento estable, continuo y sin vibraciones del motor, lo que permitirá unas aceleraciones y velocidades máximas mucho más elevadas que las conseguidas con los motores alternativos convencionales propulsados mediante hélice. La turbina con aportación de calor a volumen constante sigue el ciclo de Holzward, presenta un rendimiento teórico más elevado y necesita de un compresor mucho más pequeño. Sin embargo, presenta desventajas tales como que el fluido ha de ser confinado en un recinto durante la combustión y, por tanto, la generación de energía deja de ser continua, obteniéndose un flujo pulsatorio que originará problemas de vibraciones. Además, aumentan las dificultades de construcción al tener que incorporar válvulas de admisión y de escape, con sistema de distribución asociado. Es por todo esto que en la actualidad están en desuso, y las turbinas a presión constante constituyen la totalidad de las turbinas de gas actuales. © Los autores, 2002; © Edicions UPC, 2002. 302 Máquinas térmicas motoras 6. 2. 2 Aportación de energía al ciclo En función del ciclo de trabajo que sigue el fluido motor, encontramos: - Turbinas de ciclo abierto - Turbinas de ciclo cerrado La gran diferencia entre ambos radica en el modo en que se realiza la aportación de energía al ciclo, de modo que puede producirse en el interior del mecanismo mediante un proceso de combustión o del exterior al interior mediante un intercambiador. En las turbinas de ciclo abierto, motor endotérmico, que se esquematiza en la figura 6.2,en las que el fluido motor es el comburente de la combustión, la aportación de calor es rápida, ya que proviene de la combustión entre combustible aportado y el fluido motor que es el aire. Este aire proviene de la atmósfera y en ésta se descargan los gases de escape de modo que la parte final del ciclo no se realiza y se sustituye el fluido motor por aire fresco del exterior. QH Compresor Turbina Wnet Admisión Escape Fig. 6.2 Turbina de ciclo abierto En las turbinas de ciclo cerrado, motor exotérmico, que se muestra en la figura 6.3, la aportación de calor es lenta porque interviene la transferencia de calor. El fluido de trabajo circula en un circuito cerrado y no hay descarga en la atmósfera. La energía necesaria para calentar el fluido se obtendrá mediante un fluido auxiliar que cederá posteriormente el calor al fluido motor mediante un sistema de intercambio. Las encontramos en aplicaciones en que se aprovecha un calor residual a una elevada temperatura en que no es posible la instalación de una turbina de vapor, siempre que los factores volumen y peso pierdan importancia. Este tipo de turbinas presenta la posibilidad de utilizar un fluido motor de alta densidad, y no aire, pues al no conllevar los gases de la combustión elimina el riesgo de deterioro de los álabes de la turbina. Puede utilizar también combustibles de baja calidad, por ser un motor exotérmico. © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 303 QH Turbina Compresor Wnet QL Fig. 6.3 Turbina de ciclo cerrado 6.2.3 Disposiciones mecánicas Existen muchas variantes del esquema clásico de una turbina de gas (compresor, cámara de combustión y turbina de expansión), y son consecuencia de la adición de varios componentes de entrada y salida al generador de gas. En las aplicaciones aéreas se utilizan disposiciones mecánicas que son distintas a las aplicaciones industriales, como se verá en el apartado de aviación. Pero de modo simplificado, presentan un difusor que adecua el flujo de aire al interior de la turbina , un compresor, turbina de accionamiento del compresor y una tovera que adecua la velocidad de la salida de los gases de escape para conseguir una propulsión adecuada. En las aplicaciones industriales, donde se debe obtener la potencia en un eje, es decir, potencia mecánica, existen múltiples disposiciones, y así encontramos, en función del acoplamiento entre la turbina de potencia y el generador de gas: - Turbinas de un solo eje. - Turbinas de doble eje o eje partido, con unidad generadora de gases simple o compuesta. Las turbinas de un solo eje, en la figura 6.4, son turbinas de gas en las que sólo hay un compresor y una turbina, que forzosamente girarán a la misma velocidad, y no será otra que la del eje de obtención de potencia mecánica, donde irá conectada la carga. Es un montaje adecuado para el accionamiento de alternadores, ya que tienen una buena adaptación a las variaciones de carga y mantienen fácilmente la frecuencia de giro. Q Compresor Cámara de combustión Turbina Admisión Carga Escape Fig. 6.4 Turbina de un solo eje y de ciclo abierto © Los autores, 2002; © Edicions UPC, 2002. 304 Máquinas térmicas motoras Las turbinas de eje partido o doble (Fig. 6.5) eje son turbinas de gas en las que se pueden distinguir, en la misma turbina de gas, dos unidades, la generadora de gas que está formada por un compresor, las correspondientes cámaras de combustión, y una turbina que simplemente extraerá la potencia necesaria para mover el compresor. La otra unidad es la de potencia, que formada por otra turbina de expansión, finalizará dicho proceso de los gases obteniendo la potencia útil del motor, y que transmitirá mediante un eje independiente del de la unidad generadora de gases. Q Compresor Cámara de combustión Turbina Turbina de potencia Carga Admisión Escape Fig. 6.5 Turbina de eje partido o doble eje (generador de gases de cuerpo simple) La unidad generadora de gas no es más que una turbina de un solo eje que obtiene menos potencia. A la turbina de expansión de la unidad generadora de gases se le llama de alta presión, porque es la que recibe los gases con la presión más elevada del ciclo. La otra turbina es la de baja presión, aunque es la que obtendrá la mayor parte de la potencia. Este montaje es adecuado para el accionamiento directo de maquinaria, ya que al girar la turbina de potencia a una velocidad inferior a la del generador de gases, permite reducir el tamaño del reductor de velocidad e incluso prescindir de él. Bajo esta concepción se realizan las turbinas orientadas a la propulsión a reacción, de modo que se elimina la turbina de potencia y los gases de escape a la salida de la turbina se orientan hacia una tobera que adecua su velocidad para conseguir una correcto rendimiento de propulsión. Utilizando la disposición del doble eje, podemos distinguir el caso simple (llamado también turbina de cuerpo simple, como en la figura 6.5), en que la unidad generadora de gases contiene un solo compresor y una turbina para el accionamiento del mismo, o bien el caso compuesto, figura 6.6, en que la unidad generadora de gases estaría formada por dos o más compresores, a la vez impulsados por dos o más turbinas (en el caso de dos compresores, la turbina de gas recibe el nombre de turbina de doble cuerpo). © Los autores, 2002; © Edicions UPC, 2002. © Los autores, 2002; © Edicions UPC, 2002. 306 Máquinas térmicas motoras 4. Extracción de calor a presión constante (4-1). 4/ = P × (K1 − K4 ) T (6.4) p QH 3 QH 2 p= c te 3 2 WT WT WC 4 te te p= s=c c s= WC c te QL 4 1 1 V s Fig. 6.7 Diagrama T-S y P-V del ciclo de Brayton T 3i 3r p 2i 4r r p2 4i 2r QL 2i p 1i 1i 1r s Fig. 6.8 Ciclo ideal(i), real(r) de una turbina de gas © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 307 La expresión del rendimiento del ciclo teórico es, en función de la temperatura y la presión (5 y 6): η7 = :1(72 4+ = 1− 71 1 = 1− 72 U U −1 U :1(72 = :7 − :& γ (6.5) (6.6) 7 2(γ −1) UÏ37,02 = 3 71 (6.7) Donde ã es el cociente de calores específicos a presión y volumen constante y r es la relación de compresión (Pmáx/Pmín). En consecuencia, el rendimiento teórico del ciclo aumenta si (figura 6.7): - Aumenta la relación de compresión, aunque existe una relación de compresión óptima que maximiza el rendimiento. - Aumenta la temperatura máxima del ciclo - Se reduce la temperatura de entrada al compresor. - Aumenta el cociente de calores específicos del fluido motor. El rendimiento asociado al ciclo depende en la máquina real de los siguientos aspectos: - Los procesos de compresión y expansión no son reversibles ni adiabáticos. - Aporte de calor no se realiza a presión constante. - Pérdidas de carga debidas a la fricción del fluido. Todas estas irreversibilidades hacen disminuir el rendimiento. El grado de irreversibilidad de los componentes se puede cuantificar al definir el rendimiento isentrópico, tanto para el compresor como para la turbina, y que compara, en el caso del compresor, el trabajo necesario si el proceso fuese reversible con el trabajo suministrado en el caso real. En el caso de la turbina, se compara el trabajo de expansión obtenido en una situación real con el caso ideal. Sobre la concepción básica del ciclo termodinámico de la turbina de gas se han desarrollado distintas variaciones que a continuación se exponen. © Los autores, 2002; © Edicions UPC, 2002. 308 Máquinas térmicas motoras 6.3.2 Ciclo de Brayton regenerativo La idea básica de esta modificación del ciclo básico es aprovechar el calor de los gases de salida, para calentar el aire que procede del compresor y que entrará en la cámara de combustión (Fig. 6.9). El proceso es viable debido a una diferencia de temperatura entre los gases de salida de la turbina y los de salida del compresor de unos 200°C o más. La operación se realiza mediante un intercambiador de calor, que recibirá el nombre de regenerador. Presenta como principal ventaja la reducción del consumo de combustible y, por tanto, un aumento del rendimiento térmico del ciclo, y como desventaja el aumento del coste de inversión y su utilización principalmente en turbina estacionaria. Regenerador Escape C.C. Compresor QH Wnet Turbina Admisión Fig. 6.9 Turbina de gas con regeneración. 6.3.3 Ciclo con recalentamiento En el ciclo con recalentamiento se realiza la expansión en varias etapas, volviendo a calentar los gases hasta la temperatura máxima del ciclo antes de cada etapa de expansión (Fig. 6.10). Se obtiene a cambio elevados aumentos del trabajo específico del ciclo, pero su complejidad técnica desaconseja su utilización si no es para aplicaciones muy concretas T 3 2’ T4 3a Re ca l. p2 4a 2’’ 2 pa 2i 4’’ 4 4i p1 1 s1 s2’’ s3 s4a s4’’s3a s4 Fig. 6.10 Ciclo con recalentamiento © Los autores, 2002; © Edicions UPC, 2002. s 6 Turbinas de gas 309 6.3.4 Ciclo con enfriamiento intermedio en la compresión Con este ciclo, al introducir el enfriamiento del aire antes de ser comprimido o en una fase intermedia (si hay varias etapas de compresión), se reduce el trabajo necesario en dicha compresión y, por tanto, se obtiene un mayor rendimiento del ciclo. En turbinas de gas estacionarias, se divide la compresión en dos o más etapas y se utilizan sistemas de enfriamiento intermedio externos. En ciertos motores de avión, se enfría el aire antes de la entrada al compresor mediante sistemas más económicos, de tipo evaporativo. También es factible un ciclo que presente tanto con enfriamiento como con recalentamiento intermedio, como se muestra en la figura 6.11. QL QH Refrigerador C.C. Wnet Comp. 1 Comp. 2 Turb. 1 Turb. 2 Calentador Fig. 6.11 Turbina de gas con enfriamiento y recalentamiento intermedio. 6.4 Compresor El compresor es el componente encargado de comprimir el aire de entrada a la cámara de combustión. En función de su disposición y la froma de interacionar con el flujo de aire se distinguen dos tipologías de compresores: - Compresores de flujo radial o centrífugos - Compresores de flujo axial Para caracterizar un compresor los parámetros más importantes que deben analizarse son el caudal de aire, el rendimiento interno o isentrópico, la velocidad de rotación y la relación de compresión. Las curvas características de los compresores relacionan los anteriores parámetros y son esenciales para poder escoger el compresor más apropiado para cada aplicación. En las figuras 6.12 y 6.13 se observan las diferencias básicas entre estos dos tipos de compresores, es decir, la dirección del fluido a su paso por el compresor, de modo que la dirección de entrada y salida es la misma en un compresor axial y sufre un cambio de 90º en un compresor centrífugo. © Los autores, 2002; © Edicions UPC, 2002. 310 Máquinas térmicas motoras Estátor Eje Rótor Fig. 6.12 Compresor centrífugo Las turbinas de gas se construyen con compresores centrífugos, axiales o una combinación de una o más etapas de flujo axial seguidas por un compresor radial. Un buen diseño del compresor consistiría en obtener la máxima cantidad de aire con un diámetro determinado de compresor y con el menor número de etapas. La dificultad de conseguir valores de compresión elevados está asociada a la necesidad de imponer el movimiento en el fluido circulando a contrapresión, de modo que su tendencia natural es la de evolucionar a favor del gradiente de presiones y retroceder en sentido contrario al movimiento. Por este motivo, los compresores se construyen de diversas etapas y en cada una de ellas se realiza un moderado aumento de la presión en función del tipo de compresor. El aumento de presión conseguido en cada etapa depende del diseño del compresor, pero a la vez está asociado a la tipología del mismo. Los compresores radiales o centrífugos se basan en que el fluido se introduce en un campo rotacional de velocidades de modo que consigue un aumento de energía cinética al evolucionar de la parte central a la periferia. Esta energía cinética transferida por el rotor al fluido se transforma en presión en la voluta. Esta concepción de funcionamiento orienta el diseño de este tipo de compresores a caudales reducidos y elevados aumentos de presión en cada etapa, pero, a la vez, el cambio de orientación del flujo complica la instalación de diversas etapas en serie de los mismos Al contrario, el compresor axial no provoca un cambio de dirección del fluido, lo que dificulta la transferencia de energía al fluido, tal y como se verá en el apartado 6.3.2, y conlleva el menor incremento de presión en cada etapa, pero, a la vez, permite un caudal de flujo elevado y la concatenación de diversas etapas. Estátor Rótor Eje Fig. 6.13 Compresor axial © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 311 a) Características de los compresores centrífugos (figura 6.12): - La compresión máxima realizable por escalonamiento es de 1:3 a 1:5, y los valores que adoptan en la realidad son desde 1:1,5 a 1:2,5. - Se utiliza entre los valores de caudal de 0,1 y 80 metros cúbicos de aire por segundo - Se obtienen relaciones de compresión globales (conjunto de etapas o escalonamientos) de entre 1:10 y 1:12. b) Características de los compresores axiales (figura 6.13): - La compresión máxima realizable por escalonamiento es de 1:1,5 a 1:2,5, aunque en la realidad se usan valores entre 1:1,05 y 1:1,2.. - El caudal oscila entre los 5 y los 280 de metros cúbicos de aire por segundo. - Se obtienen valores de compresión globales para un solo cuerpo inferiores, en torno a 1:6 y 1:8, aunque el compresor axial puede estar formado por muchos cuerpos, llegando a proporcionar valores de compresión globales cercanos e incluso superiores a 1:30. Las ventajas del compresor centrífugo respecto al axial se resumen en una menor complejidad mecánica y de diseño, que conlleva una reducción de costes, una relación más elevada de presiones en una etapa, su menor longitud, ser menos propenso a empeorar su comportamiento frente a la acumulación de depósitos en los canales de aire ( polvo, hielo,...), el buen rendimiento dentro de un amplio margen de velocidades de giro y solicitaciones de carga, y que la dirección del flujo o descarga de aire sea la más idónea para acoplar un enfriador interno o intercambiador de calor. Las ventajas del compresor axial respecto al centrífugo son: el mejor rendimiento isentrópico (mide el grado de irreversibilidad), el menor diámetro que el compresor centrífugo equivalente, que significa un menor diámetro del motor, con la consiguiente reducción de la resistencia al avance en aplicaciones aeronáuticas, por ejemplo: unas relaciones de compresión muy superiores, la facilidad de ponerlos en serie, el elevado caudal de trabajo. El rendimiento interno de un compresor es el llamado rendimiento isentrópico. El proceso ideal de compresión se realiza mediante un proceso sin pérdidas, adiabático, y sin fricción, asegurando un proceso reversible. El proceso ideal es llamado pues proceso isentrópico. El proceso de compresión real, en cambio, tan sólo realiza el proceso adiabáticamente. El rendimiento isentrópico es, pues, el cociente del trabajo realizado por cada uno de los procesos en un compresor. Mediante la termodinámica se llega a la expresión 6.8 para el rendimiento de un compresor, bien sea de flujo axial o bien sea de flujo centrífugo: η= K2LGHDO − K1 72LGHDO − 71 = K2 UHDO − K1 72 UHDO − 71 (6.8) Podemos apreciar que sólo depende de la temperatura final de la etapa de compresión, que será más elevada en el proceso real que en el proceso ideal. © Los autores, 2002; © Edicions UPC, 2002. 312 Máquinas térmicas motoras 6.4.1 Compresor centrífugo En el compresor centrífugo el flujo de aire sale del mismo en dirección radial respecto al eje de rotación del motor. Pero su aplicación actual en motores de turbina de gas esta muy poco extendida . Está formado por (Fig. 6.14): - Un rodete giratorio, que desempeña la función de impulsor (rotor) - Un difusor fijo o voluta (estátor) El rodete, al girar, transmite una gran velocidad al aire. En el difusor, formado por conductos divergentes, el aire se decelera, y por lo tanto aumenta su presión estática como consecuencia de un proceso de difusión típico. En el rodete ya se produce un incremento considerable de la presión, aproximadamente del orden del 50% del aumento total que se lleva a cabo en el compresor. Fig. 6.14 Voluta (izquierda) y rodete del compresor(derecha) Una aplicación clásica donde se requerirán grandes velocidades del flujo para obtener así el máximo gasto másico posible en un compresor lo más pequeño posible será la aviación, pero en la actualidad la mayor utilidad de este tipo de elementos radica en la implementación de grupos turbocompresor para motores alternativos de automoción (Fig. 6.15). En la figura 6.16 se observa una curva típica de funcionamiento de un compresor centrífugo para una misma velocidad de giro del rodete. En las abscisas se ofrece el gasto másico, y en las ordenadas la relación de compresión a la salida del compresor. Si se observa un punto de diseño donde la relación de compresión es máxima (punto B de la gráfica de la Fig. 16), a partir del cual, al aumentar el gasto másico la variación de presiones es inferior. Si se aumenta mucho más el gasto másico, el rendimiento caerá en picado (punto E), y por tanto la variación de presiones entre la entrada y la salida del compresor tendirá a cero (punto C). Debe resaltarse que la parte de la curva comprendida a la izquierda del punto de diseño será una zona de comportamiento inestable del compresor debido al fenómeno de bombeo. © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 313 Fig. 6.15 Turbocompresor de un motor alternativo de automoción Relación de compresión El fenómeno de bombeo tiende a invertir el sentido de avance del fluido. Observando un punto cualquiera de curva de funcionamiento, situado a la izquierda del punto de diseño, se puede ver que al disminuir el gasto másico, automáticamente disminuirá la presión a la salida del compresor (punto D). Entonces, si la presión del aire después del compresor (no a la salida) no disminuye con suficiente rapidez, la corriente tenderá a invertir el sentido de movimiento y a retroceder (punto A). El fenómeno puede repetirse con elevada frecuencia y las relaciones de compresión disminuirán drásticamente. D A B Curva de velocidad constante E C Gasto másico Fig. 6.16 Curva teórica de un compresor radial © Los autores, 2002; © Edicions UPC, 2002. 314 Máquinas térmicas motoras Si se está a la derecha del punto de diseño, al disminuir el gasto másico la presión a la salida del compresor se elevará, y por tanto, seguro que es mayor que la presión existente después de éste, obteniéndose un funcionamiento estable del mismo. 6.4.2 Compresor axial En el compresor axial el flujo de aire es paralelo al eje de la máquina. La arquitectura del compresor está formada básicamente por un rotor y un estátor, ambos de varias etapas. El rotor y el estátor están formados por un conjunto de álabes (fijos en el estátor y solidarias al rotor las otras ) en cada etapa. Una etapa está formada por una hilera de álabes del rotor, seguidas de una hilera de álabes fijas del estátor. Los álabes son delgados perfiles aerodinámicos, cuyas geometrías son mucho más cuidadas y precisas que los que forman la turbina. En la figura 6.17 se puede observar la estructura de un compresor axial de aplicación aeronáutica. En cada etapa, el fluido sufre una aceleración en el rotor, que va seguida de una difusión que convierte la energía cinética adquirida en un aumento de presión. Al disponer fácilmente de sucesivas etapas se pueden conseguir relaciones de compresión elevadas. El número de posibles etapas está limitado por la velocidad común de giro del compresor, de modo que en los extremos de los álabes de mayor presión de trabajo se apreciará desprendimiento de la capa límite, dando lugar a una caída del rendimiento y a la aparición de vibraciones. Para subsanar dicho problema se puede dividir el compresor en dos o más cuerpos, de varias etapas cada uno, a velocidades distintas, y empleando por tanto otras tantas turbinas para accionar dichos cuerpos, siendo entonces posible relaciones de compresión de hasta 1:30. Fig. 6.17 Rotor del compresor axial de un turbroreactor de aviación © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 315 En los álabes giratorios, pertenecientes al rotor (Fig. 6.17), es donde el fluido recibe el trabajo del compresor, que será en forma de energía cinética en su mayor medida y el resto en forma de presión. Seguidamente, el fluido, al llegar a los álabes fijos del estátor (Fig. 6.18), perderá la energía cinética convirtiéndose en presión, en virtud del efecto de difusión que llevan a cabo los conductos divergentes entre los álabes fijos, y posteriormente el fluido llegará a una nueva etapa del compresor. El estátor hace de difusor y de guía del fluido al rotor siguiente (Fig. 6.19). A la salida del estátor de la última etapa hay una corona de álabes estacionarios que endereza el flujo en dirección axial. El flujo a través del compresor constituye un problema tridimensional sumamente complicado. Fig. 6.18 Estator del compresor axial de un turborreactor de aviación Fig. 6.19 Álabes del rotor y estator de un compresor axial de un turborreactor de aviación © Los autores, 2002; © Edicions UPC, 2002. 316 Máquinas térmicas motoras En la figura 6.20 se puede observar el efecto del rotor y del estator en la modificación de la velocidad del fluido y el aumento de presión de éste. En dicha figura se muestra la representación esquemática de un corte transversal del compresor (por un plano paralelo al eje) y por tanto a una altura del álabe fija. El fluido entra en el rotor a una velocidad total que es toda en la dirección axial y que se puede descomponer en una velocidad de arrastre del álabe y una velocidad relativa al álabe. V relativa al álabe V total de entrada V de arrastre Álabes del rotor Sentido de giro del motor V relativa al álabe V salida del rotor V de arrastre Álabes del estátor V total de salida Diagrama de velocidades en el rotor V de arrastre Fig. 6.20 Variación de velocidad del fluido a su paso por el compresor axial © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 317 La velocidad total es la velocidad absoluta respecto a la referencia fija exterior, la velocidad de arrastre es la que tendrá una referencia moviéndose solidaria al álabe y la relativa es la que se observará del fluido respecto a la referencia solidaria al álabe. A la salida del rotor, la velocidad total ya no es toda en dirección axial, sino que aparte de esta dirección la velocidad tiene una componente tangencial (en la dirección de giro del rotor), que no es más que el aumento de velocidad resultante de pasar por el rotor. A la salida del estator, el fluido sale con una velocidad axial e igual a la entrada del rotor; por tanto, en el estator la componente tangencial de la velocidad se ha convertido en presión. El grado de reacción es la relación entre el aumento de entalpía o presión estática a través del rotor y el aumento de entalpía o presión estática en la etapa del fluido.La expresión 6.9 muestra el grado de reaccion, siendo P las presiones, a la entrada de la etapa del compresor (1), a la salida del rotor (2), y a la salida del estator de la etapa (3). σ= 32 − 31 33 − 31 (6.9) Cuando el grado de reacción es de 0,5 se distribuyen por igual, dicho aumento entre el rotor y el estátor, y tiene como ventaja que el perfil de alabe necesario para la corona fija y la móvil es el mismo. En la práctica interesan grados de reacción sensiblemente iguales a 0,5 o en su defecto ligeramente superiores. Al estar por encima de 0.5 se obtiene una gran estabilidad de funcionamiento y buenos rendimientos del compresor, aunque a costa de reducir notablemente el caudal másico. Para conservar constante el grado de reacción, hay que modificar convenientemente la geometría del álabe a lo largo de su longitud. Durante el funcionamiento real del compresor pueden surgir algunos efectos indeseables, debidos en parte a los efectos de la compresibilidad del fluido. Así, unas velocidades excesivas del aire que sale de los álabes pueden ser contraproducentes para el comportamiento del compresor. La primera de las velocidades altas que resulta de interés es la que corresponde al llamado Mach crítico (en torno a números de Mach de 0,7). Para velocidades mayores a ésta, las pérdidas empiezan a aumentar, hasta llegar a un punto en que se anula por completo el aumento de presión, velocidad que recibe el nombre de Mach máximo ( en torno a números de Mach iguales a 0,85 ). Es de sumo interés recordar que la velocidad del sonido en el aire aumenta con la temperatura. Otras irregularidades en el funcionamiento del compresor pueden ser la distorsión, que es una distribución desigual de la presión, de la temperatura o de la velocidad de entrada a un compresor, que puede ocurrir si el conducto de entrada al motor tiene una curva fuerte a poca distancia de dicha entrada o si la entrada al motor se encuentra en la raíz del ala, y el ahogamiento, donde se ha llegado al máximo flujo de fluido que puede pasar por el compresor a una velocidad del rotor determinada. En la figura 6.21 se tiene el mapa de funcionamiento de un compresor axial típico. En el eje de las abscisas se dispone el gasto másico, o lo que es lo mismo, el flujo másico de fluido que pasa por el compresor, y © Los autores, 2002; © Edicions UPC, 2002. 318 Máquinas térmicas motoras en las ordenadas tenemos la relación de presiones. La línea de carga es el límite del funcionamiento correcto del compresor y a la izquierda de la misma las inestabilidades aerodinámicas impiden el funcionamiento correcto del compresor. Las curvas concéntricas son curvas donde el rendimiento del compresor es constante y su valor de expresa en un % del valor máximo o de diseño. Las otras curvas, que van desde la línea de carga hasta el eje de abscisas con pendiente cada vez más pronunciado, son las curvas durante las cuales el compresor mantiene constante la velocidad del rotor y se expresa en % respecto a la velocidad de diseño. Se puede observar muy bien el fenómeno de ahogamiento, para una velocidad constante del rotor, al disminuir la relación de compresión; aumenta el flujo hasta que la curva se hace vertical, y por tanto, el flujo ya no aumenta aunque disminuya la variación de presiones. Relación de compresión 6.0 5.5 Línea de carga 5.0 4.5 ηc 4.0 = % 92 90% 0% =9 3.5 ηc 3.0 ηc 70% % =80 80% ηc = 70% ηc 0% =6 N/(θ)½= 100% diseño 2.5 30.0 35.0 40.0 45.0 50.0 55.0 Gasto másico Fig. 6.21 Mapa de funcionamiento de un compresor axial Básicamente existen dos métodos para controlar el flujo o la presión de un compresor axial, que son: - Control por variación de la velocidad de giro - Control por ajuste de los álabes del estátor © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 319 Apartir del mapa de funcionamiento del compresor axial se observa como puede mantenerse el flujo máximo constante variando la presión de salida a costa de controlar la velocidad de giro y provocando una variación considerable del rendimiento. Fig 6.22 Sistema mecánico de control de los álabes del estator del compresor En el caso que se pretenda variar el flujo másico, se puede mantener la velocidad del rotor y en consecuencia se provocará una caída de la presión y del rendimiento notables, o por el contrario, se puede variar la velocidad del rotor, obteniendo una variación del flujo, pero manteniendo un rendimiento similar y una presión de salida semejante a la anterior. En muchos casos se dispone de los álabes del estator ajustables (Fig. 6.22) cosa que permite variar el ángulo de éstos, y será muy útil para mantener un alto rendimiento cuando el compresor trabaje a carga parcial o en sobrecarga. Al variar el ángulo del álabe y manteniendo la presión constante, se obtienen una variaciones en el flujo mucho mayores que en el caso en que se varía la velocidad de giro. De este modo, tener los álabes del estator ajustables permite operar a velocidad constante, evitando así efectos indeseables que surgen al modificar la velocidad del rotor, como pueden ser fenómenos de resonancia. A la vez, el control mediante la variación del ángulo de los álabes permite un campo de control mucho más amplio que el ofrecido por el mismo compresor mediante un sistema de control por variación de la velocidad de giro. © Los autores, 2002; © Edicions UPC, 2002. 320 Máquinas térmicas motoras En la figura 6.23 se muestra el funcionamiento del motor para una velocidad determinada, y en función del ángulo de los alabes del estátor. En las abscisas se tiene el gasto másico, y en las ordenadas la relación de compresión. Las curvas concéntricas, al igual que en la figura 6.21, representan las curvas de rendimiento constante. Las curvas de pendiente negativa son las que representan el funcionamiento del compresor con el ángulo de los alabes del estátor constante. 140 120 55º ite lim a 45º e lín 100 .99 35º .98 80 60 a=25º η/η = cte .96 .94 .90 40 .85 .80 20 η/η 0 a = cte Relación de compresión 79º 67º 0 40 60 80 100 120 140 Gasto másico Fig. 6.23 Gráfico de funcionamiento de compresor axial con álabes variables 6.5 Cámara de combustión La combustión es la parte del proceso en que se aporta calor al ciclo termodinámico para que posteriormente se transforme en trabajo de eje. Dependiendo de si se opera en un ciclo cerrado o abierto, la combustión se realizará en el exterior o en el interior del motor respectivamente. En la combustión externa es necesario un intercambiador de calor, y el proceso de combustión en sí es más sencillo por el hecho de trabajar sin limitaciones de espacio, de calidad de combustible, ni de tiempo, aunque su aplicación es minoritaria, ya que la potencia calorífica a transmitir al fluido es claramente muy inferior a los valores que se pueden conseguir en la combustión operando con el fluido motor como comburente. Por consiguiente la cámara de combustión de una © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 321 turbina de ciclo abierto tiene un diseño equivalente a una caldera y puede ser común al de una instalación de turbina de vapor. El tipo de funcionamiento más común es la combustión interna, donde el fluido de trabajo, el aire, que será el comburente de la reacción de combustión, se toma de la atmósfera y se comprime en el compresor. El aire comprimido se introduce en la cámara de combustión, donde se inyecta también el combustible en estado líquido o gaseoso. La combustión, una vez iniciada mediante una chispa, es continua, pues incorpora la mezcla fresca al frente de llama. Los productos de la reacción son los habituales de la combustión entre un hidrocarburo y el oxígeno del aire, y son el monóxido de carbono, el dióxido de carbono y agua. Otros productos de la reacción son el nitrógeno y el oxígeno, procedentes del aire de entrada, y que en el caso del nitrógeno, si las temperaturas de combustión son muy elevadas, puede derivar en óxidos de nitrógeno, aunque esta problemática no es tan importante como en los motores alternativos de combustión interna porque las presiones de trabajo en las cámaras de combustión de las turbinas de gas son inferiores. La combustión que se pruduce en una turbina de gas siempre es con exceso de aire, ya que debe asegurarse de una combustión completa de todo el combustible, muy difícil si sólo se dispone del aire teórico para que el proceso sea completo, pero este hecho se ve influenciada por la necesidad de reducir la temperatura de los gases de la combustión, cercana a los 2000°C a una temperatura soportable por los álabes de la turbina, inferior incluso a la mitad de la temperatura de combustión. Por consiguiente, al añadir aire fresco a los productos de la combustión, se consigue la viabilidad tecnológica de la turbina al producirse una reducción de la temperatura sin pérdida de entalpia, pero que comporta un empeoramiento del ciclo teórico al operar a menor temperatura. Por otro lado, el exceso de aire permite completar la reacción de modo que el carbono, en forma de monóxido de carbono, pueda oxidarse de forma completa para convertirse en dióxido de carbono, aunque este hecho pueda favorecer el aumento no deseado de óxidos de nitrógeno, por el exceso de oxígeno. Son habituales relaciones de 60 kg de aire por cada kg de combustible, llegando en algunos casos a los 100 kgde aire, teniendo en cuenta que la relación estequiométrica, con los combustibles habituales, se produce en torno a los 15 o 17 kg de aire por 1 kg de combustible. Estos ratios tan elevados de aire respecto al combustible obligan a realizar combustiones que aunque localmente homogéneas son globalmente heterogéneas para poder mantener la proporción aire-combustible en los límites de inflamabilidad, lo que comporta diseños de cámara de combustión donde todo el aire que introduce el compresor no interacciona con el combustible que se aporta, localizándose la llama en una determinada zona de la cámara. Cada unidad de turbina de gas suele incorporar varias cámaras, dependiendo del tamaño de éstas, y están ubicadas generalmente paralelas al eje de la máquina, entre el compresor y la turbina, en forma de revólver. Una cámara de combustión debe responder a las siguientes necesidades, como son un alto rendimiento de la combustión, alrededor del 99% para condiciones de diseño y no inferior al 95% fuera de éstas, es decir, para toda la gama de trabajo. Se entiende por rendimiento de la combustión el cociente entre el calor obtenido en la cámara y el poder calorífico inferior del combustible. Una combustión incompleta puede ser debida a un diseño inadecuado de la cámara o a un enfriamiento local de la llama. © Los autores, 2002; © Edicions UPC, 2002. 322 Máquinas térmicas motoras También es necesaria una pérdida de presión mínima, respecto a la presión de entrada en la cámara, que en motores estacionarios es inferior al 4%, y superior para los otros, como es el caso del avión (en torno a un 10%). Un salto de presión entre la entrada y la salida comporta un aumento del consumo de combustible junto con una pérdida de potencia. La pérdida de presión puede ser debida al rozamiento superficial, a las turbulencias, o a un aumento de la temperatura, que comportará la consiguiente disminución de la densidad. Además, el peso y dimensiones de la cámara de combustión deben ser reducidas, esencialmente en la aviación, y en general en todas las unidades no estacionarias. En la aviación, además, la cámara de combustión debe estar bien integrada a la unidad para no incrementar el área frontal. Para compensar estas exigencias de la aviación se permitirá una etapa de servicio más corta, en torno a las 10000 horas. Cuando menor sea el espacio disponible, más difícil será cumplir con todos estos requisitos. También es necesaria la uniformidad de la temperatura entre la salida de la cámara de combustión y la entrada a la turbina para no favorecer el depósito de partículas sobre los álabes, y la fiabilidad, igual o superior a la vida sin revisiones del motor. Por último, el encendido debe ser rápido y seguro, además de poseer un funcionamiento estable, sean las que sean las condiciones de operación y ambientales. En aviación se obtienen presiones y temperaturas muy diversas durante un mismo vuelo. Las cámaras de combustión son generalmente con calentamiento previo de los gases que entran en la misma, y están formadas por la tobera de combustible o quemador, la zona primaria, la zona secundaria, la zona de dilución y la zona de transición. La tobera es la entrada del combustible a la cámara, y está rodeada por un torbellinador que facilita la evaporación del combustible y la mezcla con el aire, esenciales para una buena combustión. La zona primaria es donde tiene lugar la inyección del combustible y también donde se produce el encendido. Se procura tener en esta zona una mezcla estequiométrica de aire y combustible para favorecer la reacción y mantener una temperatura estable, que puede llegar a valores máximos cercanos a 2000°C, aunque no conviene que sea tan alta para evitar la formación de los óxidos de nitrógeno. Para ello, a veces se inyecta combustible mezclado con un 30% d agua destilada aproximadamente, que además favorece la dilución y la combustión. Es aquí donde se halla la bujía de encendido, que al ser la combustión continua sólo funcionará en el momento de puesta en marcha del motor, después de la cual la llama ha de ser automantenida, estable. Para ello, una parte del flujo ha de circular desde la parte ardiente de la cámara hasta el combustible y aire entrantes. La zona secundaria es donde hay una primera mezcla de los gases de combustión con el aire en exceso, para asegurar una completa combustión y a la vez empezar a bajar la temperatura de los gases para no dañar los álabes de la turbina. Se alcanza en esta zona una mezcla aproximada del 150% del valor estequiométrico. Hay que evitar que la llama se enfríe localmente, lo que daría paso a una disminución drástica de la velocidad de reacción. En la zona de dilución es donde entra el resto de aire necesario para tener al final una mezcla aproximada del 400% del valor estequiométrico, y que tendrá como consecuencia una reducción de la temperatura de los gases de salida hasta valores soportables en los álabes de la turbina, en torno a los 1000°C. Debe © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 323 promoverse la turbulencia para que se mezclen las corrientes de gases calientes con las de aire frío, y así conseguir la homogeneización de la temperatura. Por último la zona de transición es por dónde pasan los gases hasta llegar a las toberas de alimentación de la turbina. La velocidad del aire debe ser siempre inferior a la velocidad de la llama para que ésta no salga de la cámara. El combustible líquido deberá evaporarse antes de ser quemado, con lo que será muy importante el tamaño de las gotas del combustible después de la inyección, y que es función de la presión a la que se inyecta. Las gotas demasiado grandes comportarán un tiempo de evaporación elevado, mientras que las demasiado pequeñas no penetran bien en el flujo de aire. Hay que encontrar un compromiso. Aparte de la presión, la velocidad de evaporación aumenta si se inyecta a altas velocidades y si se calienta el combustible previamente. 6.5.1 Tipologías de cámaras de combustión Existen diversos tipos de cámaras de combustión para la turbina de gas: - Cámaras de combustión individuales - Cámaras de combustión anulares Fig. 6.23 a) Cámaras de combustión individuales © Los autores, 2002; © Edicions UPC, 2002. 324 Máquinas térmicas motoras Las cámaras de combustión individuales, figuras 6.23 (a y b), se disponen en número variable en la periferia de la turbina y alrededor del eje de unión entre compresor y turbina. Cada turbina de gas puede poseer entre 5 y 16 cámaras que son de fácil inspección y montaje y están conectadas entre ellas para igualar la presión y posibilitar la propagación de la llama entre ellas caso de que se produzca un apagado de la misma o facilita el transitorio del arranque. Fig. 6.23 b) Esquema de cámaras individuales Las cámaras anulares, en las figuras 6.24 (a y b), están formadas por un conducto anular único por el que circula el aire que sale del compresor. En el interior de la cámara anular se encuentra también el tubo de llama anular, y previa a la salida del compresor se hallan una serie de inyectores dispuestos convenientemente, normalmente entre 10 y 20. El diseño de estas cámaras es más complejo porque es más difícil conseguir la mezcla y la dosificación del aire primario y secundario que en las individuales. Tienen la ventaja de reducir el área frontal del motor y, por tanto, en aplicaciones aéreas se reduce el arrastre del avión. Fig. 6.24 a) Imagen de una cámara anular © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 325 Inyector Encendido Aire primario Aire de refrig era ció n Fig. 6.24 b) Esquema de una cámara de combustión anular 6.5.2 Estabilidad de llama en la cámara de combustión En la relación de aire y combustible existen unos valores, uno máximo y uno mínimo, que definen un intervalo fuera del cual la llama resulta inestable. Los límites, uno rico (el cociente entre aire y combustible ha disminuido) y otro pobre de la mezcla, son diferentes para cada cámara de combustión, y representan el punto en que la llama se apaga, aunque las inestabilidades se presentan mucho antes. Relación aire-combustible 200 Lím ite 150 Zona estable 100 o ric te i Lím 50 0 po bre 0.25 0.50 0.75 1.00 Gasto másico de aire kg/s Fig. 6.25 Gráfico del lazo de estabilidad de la turbina de gas © Los autores, 2002; © Edicions UPC, 2002. 1.25 326 Máquinas térmicas motoras La manifestación de la inestabilidad de llama, denominada marcha dura de la turbina, provocará problemas de vibraciones en los álabes y acortará la vida de la máquina. Se observa en el gráfico de la figura 6.25 la evolución de los límites. Así, si aumenta la velocidad del aire, y por tanto el flujo o gasto másico, se disminuyen las relaciones de la mezcla estables, es decir, se estrecha el margen de relaciones estables, llegando a un punto en que no puede producirse la combustión a partir de determinados valores de gasto masico. El lazo de estabilidad de la figura está representado para una presión en la cámara de combustión determinada. Así, la presión es otro factor determinante en la estabilidad. Un descenso de la presión repercutirá en la velocidad de reacción, siendo ésta más baja y, por tanto, siendo necesario un tiempo de reacción más elevado. En consecuencia, al disminuir la presión se estrechará la curva de la figura, siendo menor el margen de maniobra. En cambio al aumentar la presión de la cámara de combustión se tendrá una zona de estabilidad con un margen mayor para variar las relaciones de la mezcla. Será importante en la aviación que se mantengan unos márgenes amplios para las presiones de salida del compresor, aun cuando el avión se encuentre a su máxima altura de vuelo. En las maniobras de aceleración y deceleración se producirá un estado transitorio debido a un cambio brusco de la relación aire-combustible de la mezcla. Así, por ejemplo, al acelerar, instantáneamente se abrirá la mariposa para inyectar más combustible en la cámara de combustión, pero hasta que el motor no alcance la nueva velocidad y por tanto no se modifique el gasto másico se tendrá una mezcla más rica que la anterior durante unos instantes, por lo que el motor se encontrará más cerca de los límites de estabilidad. El motor pues debe disponer de dispositivos para impedir que la llama se apague durante estos estados. 6.5.3 Intensidad de la combustión El parámetro de la intensidad de combustión es un indicador de la carga térmica que sufre la cámara de combustión lo que advierte de las solicitaciones de los materiales que la componen. Su cálculo se establece a partir de la relación 6.10, donde Q es el flujo calórico, V es el volumen de la cámara de combustión y P es la presión de la combustión. ,= 4 9 ×3 (6.10) Cuanto más bajo sea el valor, más sencillo será el diseño del sistema de combustión para que cumpla con todos los requisitos anteriormente mencionados. Los sistemas de combustión para la aviación tienen unos valores comprendidos entre los 20000 y los 50000 kW/m3atm. En las aplicaciones industriales de la turbina de gas se obtienen valores de tan sólo una décima parte de los de aviación, puesto que se dispone de un volumen mucho mayor para las cámaras de combustión. © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 327 6.5.4 Aportación de combustible La aportación de combustible depende del estado físico en que se encuentra el mismo diferenciándose las turbinas que utilizan combustible en fase gas de las que utilizan combustible en fase líquida. La utilización de combustible en fase gas se restringe de forma habitual al empleo de gas natural o equivalente, y se encuentra en las turbinas estacionarias de generación. . La inyección de los combustibles líquidos resulta tener una complejidad superior a la inyección de los gaseosos porque para formar la mezcla con el aire, el combustible liquido deberá vaporizarse previamente. Existen dos tipos básicos de inyectores de combustibles líquidos: - el atomizador - el vaporizador El atomizador introduce el combustible pulverizado en finas gotas, y por lo tanto en fase líquida, dentro de la cámara de combustión. Interesa un diámetro medio de las gotas pequeño porque entonces aumenta la superficie total de las gotas, con lo que se facilita la vaporización del combustible, y la formación de la mezcla. Para pulverizar el combustible, éste se introduce en la cámara a alta presión y pasando por un pequeño orificio. Un atomizador muy corriente es el de tipo centrifugo (Fig. 6.26), en el que el combustible, impulsado por una bomba, entra a presión en el conducto periférico, para pasar después a la cámara del torbellino, y de allí entra en la cámara de combustión a través del orificio. Existe un embolo regulador de la entrada de combustible, y que permanecerá mas o menos abierto en función de la presión del combustible. Al disminuir la carga, y por tanto el consumo de combustible, la presión del combustible disminuye, y la pulverización pierde calidad. CONDUCTO ANULAR PERIFERICO EMBOLO Fig. 6.26 Atomizador centrífugo © Los autores, 2002; © Edicions UPC, 2002. CAMARA DE TORBELLINO 328 Máquinas térmicas motoras Una modificación del anterior sería el atomizador con conducto de retorno (Fig. 6.27), en el que siempre se suministra la cantidad máxima de combustible a la cámara del torbellino, aunque no todo se introduce a la cámara de combustión, sino solo el necesario según el régimen de carga, y el resto es devuelto a la bomba. Esta modificación persigue mantener la presión del combustible elevada y constante para todo régimen del motor, para asegurar así una buena pulverización. CONDUCTO ANULAR PERIFERICO RETORNO DE COMBUSTIBLE CAMARA DE TORBELLINO Fig. 6.27 Atomizador con conducto de retorno Mezcla aire combustible Combustible Cámara de combustión Aire primario Combustible Mezcla aire combustible Fig. 6.28 Vaporizador © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 329 El vaporizador (Fig. 6.28), mezcla el combustible y el aire previamente a la entrada de la cámara de combustión, aprovechando la incidencia del calor proveniente de la misma se consigue la vaporización del mismo. El vaporizador tiene una combustión mas estable que los atomizadores, especialmente a bajas revoluciones por minuto del motor, pero en contrapartida y para el arranque del motor, al no disponer de calor en la cámara de combustión, será necesario un atomizador. Para aumentar la potencia, puede inyectarse agua en el compresor, en la cámara de combustión, o bien en ambas partes. Al inyectar agua en el compresor se reduce la temperatura del aire de admisión, volviéndolo mas denso, y por tanto el flujo de aire comprimido aumenta manteniendo el mismo régimen del motor, aumentando la potencia disponible. Al inyectar agua en la cámara de combustión, se enfrían los gases del interior, y por tanto se consigue introducir una mayor cantidad de combustible sin sobrepasar la temperatura máxima admisible en los alabes de la turbina, obteniendo mas potencia. Así como en la inyección de agua en el compresor las temperaturas externas al motor limitarán el uso de esta técnica, por el peligro de la formación de hielo, la inyección de agua en la cámara de combustión podrá usarse siempre que convenga. La combinación de ambas técnicas permite aumentos de potencia en torno al 10%. 6.5.5 Sistemas de ignición La ignición de la llama se produce en el arranque del motor, puesto que posteriormente la llama en la cámara de combustión se mantiene encendida, de forma que es posible realizar una combustión continua. El sistema está formado generalmente por una bujía y un inyector de arranque. Para que la llama se mantenga encendida es necesario que el combustible que entra en la cámara entre en contacto con la llama y así pueda encenderse. Una forma de que ello se produzca es formando un flujo recirculante que dirija una parte de la mezcla ardiente hacia el combustible y aire entrantes en la zona primaria. Para obtener un flujo recirculante, debe inducirse un torbellino, generalmente mediante la introducción del aire primario a través de alabes de turbulencia que generaran una zona de baja presión en la cámara y a la que tenderán una parte de los gases ardientes. 6.5.6 Arranque de la turbina de gas En el arranque del motor es dónde se producirá el encendido de la mezcla, para proseguir posteriormente encendida durante el funcionamiento del motor debido a que se tiene una combustión continua. El primer paso para arrancar el motor es acelerar el compresor hasta que proporcione un gasto o flujo másico de aire capaz de mantener una combustión dentro los límites de estabilidad. Para materializar el primer paso existen diversas opciones: inyectar aire comprimido, procedente de una fuente externa al motor, directamente a la turbina encargada de accionar el compresor, o bien, emplear un motor eléctrico o una turbina de tamaños reducidos y conectados al eje turbina-compresor, mediante el consiguiente sistema reductor y embrague. En el caso de la turbina de gas auxiliar, lo más común es que se accione mediante aire previamente comprimido. © Los autores, 2002; © Edicions UPC, 2002. © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 331 6.6.1 Turbinas de flujo radial Las turbinas de flujo radial son de aspecto semejante al del compresor centrífugo, pero con flujo dirigido hacia dentro y álabes en la tobera en vez del difusor. En tamaños pequeños su uso está muy extendido en la industria criogénica como turbodilatador. Sin embargo, no resulta tan apta para las altas temperaturas a que se ve sometida en una turbina de gas. Se utilizan sólo para potencias extremadamente bajas o cuando el tamaño compacto tiene más importancia que el rendimiento, puesto que las turbinas de flujo axial poseen un mayor rendimiento para todas las potencias, a excepción de las extremadamente bajas. Un caso de especial implantación es el de la turbina de un grupo turbocompresor para la alimentación de un motor alternativo de combustión interna, como se vio en el subapartado 6.3.1 (Fig. 6.14). 6.6.2 Turbinas de flujo axial La turbina de flujo axial se utiliza casi siempre en motores de turbina de gas. Puede estar formada por una o más etapas, consistiendo cada una de ellas en una hilera de tobera y una de rotor, y al igual que el compresor, tanto el rotor como la tobera están formados por un conjunto de álabes, fijos en la tobera, y solidarios al rotor los otros. En las figuras 6.30 y 6.31 se ofrece una turbina de flujo axial de aplicación aeronáutica. En las turbinas de flujo radial existe un cambio mayor por etapa que en los compresores de flujo axial, puesto que en éstos el flujo se desacelera (se difunde) en los conductos, y en la turbina el gas se acelera. La acción de difusión del compresor permite sólo cambios moderados en cada etapa, a fin de evitar la separación del fluido de los alabes, que comporta pérdidas. En la hilera de la tobera, el gas sufre una expansión en dónde la velocidad tangencial aumenta en la dirección de giro, con una caída consiguiente en la presión estática. En la hilera del rotor la velocidad tangencial del flujo disminuye, a causa de una nueva expansión, aparte de ser desviado. Al igual que en los compresores, en las turbinas de flujo axial también se define el grado de reacción, que es el cambio de entalpía o temperatura estática a través del rotor respecto al cambio de entalpía o temperatura total que experimenta el fluido a su paso por cada etapa de la turbina. Al trabajar con grados de reacción del 50% se minimizaran las pérdidas en los álabes. También se define en las turbinas el rendimiento global, como el cociente entre los saltos de temperatura reales e isentropicos (si se realizase la expansión de forma ideal) que experimenta el fluido a su paso por la turbina. El proceso de expansión, aumento de la velocidad, y cesión de la energía del fluido motor durante el paso por la turbina se ofrece en la figura 6.32. En dicha figura se tiene un esquema de los cambios de velocidad que experimenta el fluido a su paso por una etapa de la turbina. En primer lugar, el fluido entra a las toberas del estator con una velocidad absoluta V1, ligeramente desviada de la dirección axial. Al pasar por la tobera, el fluido se expansiona, obteniendo nuevos valores de presión y temperatura y una velocidad de salida de la tobera igual a Vsal, mayor que la velocidad de entrada (V1). Vsal puede descomponerse como suma de la velocidad de arrastre (Varr) y la velocidad relativa (Vrel1) del fluido al rotor de la etapa. © Los autores, 2002; © Edicions UPC, 2002. 332 Máquinas térmicas motoras Fig. 6.30 Turborreactor con turbina de flujo axial Fig. 6.31 Detalle de los álabes de la turbina © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 333 A su paso por el rotor, el fluido sufre una nueva expansión y un fuerte cambio de dirección, cediendo parte de su energía cinética al rotor. La velocidad del fluido a la salida del rotor (Vfin) puede descomponerse también como suma de la velocidad de arrastre (Varr) y la velocidad relativa del fluido respecto al rotor (Vrel2). En turbinas con más de una etapa las velocidades del fluido a la entrada (V1) y la salida (Vfin) de las etapas serán las mismas y así se podrán aprovechar las mismas formas de los alabes en todas las etapas. V1 Toberas de estátor Varr Vrel1 Vsal Motor sentido de giro Vfin Varr Vrel2 Fig. 6.32 Velocidades del fluido en una etapa de una turbina axial Como la velocidad de arrastre del fluido respecto al rotor es función de la distancia que existe entre el fluido y el pie de álabe, los diagramas de velocidad del fluido adoptan formas distintas dentro del mismo álabe. El comportamiento de la turbina axial puede observarse en la gráfica de la figura 6.33. En las abscisas se representa la relación de expansión (cociente entre la presión inicial y la final). En las ordenadas se representa el rendimiento global y el gasto masico. Las distintas curvas representan una velocidad constante de la turbina, en relación con la velocidad de diseño. El rendimiento global se mantiene © Los autores, 2002; © Edicions UPC, 2002. 334 Máquinas térmicas motoras aproximadamente constante para un amplio margen de velocidades de giro y relaciones de expansión como consecuencia de que el flujo se acelera, y permite que los álabes trabajen sin incrementar las pérdidas al variar las condiciones de trabajo. Por otra parte, el máximo gasto másico se alcanza para unas relaciones de expansión que dan lugar a condiciones de obturación en algún punto de la turbina. La curva discontinua representa el comportamiento de la turbina al modificar su velocidad. En este caso, la relación de expansión y el gasto másico aumentan a medida que se incrementa la velocidad de giro. nt 1.0 0.8 1.0 0.6 0.8 0.4 0.6 N/(T03) 1.0 (para el valor de diseño) 0.8 0.4 m(T03)½ /p03 (para el valor de diseño) 1.2 Obturación de la turbina 1.0 0.8 1.0 0.6 0.6 N/(T 03) (para el valor de diseño) 0.4 0.2 0.4 1.0 2.0 3.0 4.0 5.0 Relación de expansión p03/p04 Fig. 6.33 Comportamiento de la turbina axial En el diseño de las turbinas de gas se trata continuamente de aumentar el impulso o potencia de salida correspondiente, reducir su peso o disminuir el consumo de combustible. Tal y como se ha visto, uno de los métodos para aumentar el rendimiento térmico del ciclo era aumentar la temperatura máxima de éste, o lo que es lo mismo, aumentar la temperatura de los gases procedentes de la combustión a la entrada de la turbina. © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 335 Los diseñadores han encontrado procedimientos para elevar esta temperatura a un ritmo mayor que lo que permitían los materiales disponibles. Una solución a este problema se basa en el enfriamiento de las turbinas, que permite un aumento de la temperatura de los gases de entrada a la turbina y mantener, al mismo tiempo, una temperatura constante en el material del álabe. Los efectos perjudiciales de todas las técnicas de enfriamiento son un incremento de los costes de producción de los álabes de las turbinas y una pérdida del trabajo en dicha turbina. Las pérdidas del sistema de refrigeración son debidas a: - La lógica pérdida asociada a la disminución del gasto másico. - La expansión deja de ser adiabática. - Pérdidas de carga y disminución de la entalpía debidas a la mezcla de aire refrigerante con la corriente caliente de gases. - La realización de un trabajo de bombeo de los álabes contra el aire refrigerante. Normalmente se utilizan el aire o el agua u otro líquido como refrigerantes. La utilización del aire resulta la más lógica, ya que éste puede ser extraído del compresor y enviado a los álabes a través de conductos. Existen diversos métodos para refrigerar por aire, que pueden ser internos o externos, dependiendo de si el aire de refrigeración entra en contacto con el fluido de trabajo. En la refrigeración interna por aire, el método más eficaz es la refrigeración por convección forzada (Fig. 6.34), donde se utiliza alrededor de un 2% del gasto másico del aire para cada fila de álabes, y que puede reducir la temperatura de los álabes entre 200 y 300°C, permitiendo así la posibilidad de aumentar la temperatura de admisión de la turbina hasta llegar a unos 1300°C aproximadamente. Fig. 6.34 Alabe con enfriamiento por convección En el otro extremo se dispone la refrigeración por aire externa al álabe, cuyo método más eficaz es la refrigeración por transpiración (Fig 6.35), que consiste en forzar al aire, a través del material poroso del álabe, a pasar del interior a la cara externa, es decir, que el aire interacciona con la corriente de gases. Este método presenta dos ventajas, la primera de ellas es una extracción del calor del álabe de un modo más uniforme, y la segunda es que aísla la superficie exterior del álabe de la corriente caliente de gases. El enfriamiento con líquido de los álabes de la turbina resulta un método más eficaz, aunque son poco factibles sus aplicaciones por varios motivos, como es la dificultad de implementar este tipo de refrigeración. El intercambiador necesario es de un gran tamaño, por lo que sólo será aplicable este método en plantas estacionarias de potencia. © Los autores, 2002; © Edicions UPC, 2002. 336 Máquinas térmicas motoras Fig. 6.35 Alabe con enfriamiento por transpiración Todos estos métodos están pensados para la refrigeración del rotor de la turbina, aunque a temperaturas muy elevadas puede ser necesario refrigerar también elementos menos solicitados, como podrían ser los álabes de las toberas o las paredes de los conductos. 6.7 Turbinas de gas para la propulsión de aviones Uno de los campos de mayor profusión del empleo de la turbina de gas es el de la aviación. Los inicios de la misma estuvieron marcados por la propulsión mediante los motores alternativos, y no fue hasta el 1939 cuando se construyo el primer avión propulsado por una turbina de gas. A partir de ese momento, la turbina de gas se fue imponiendo al motor alternativo como propulsor aéreo como consecuencia de su creciente desarrollo y sus enormes ventajas con respecto a los motores alternativos. Los cuerpos autopropulsados en un medio fluido, como son precisamente los aviones en el aire o las embarcaciones en el agua, avanzan gracias a la reacción por el desplazamiento hacia atrás de una importante masa del medio. Así, se puede definir el empuje como la reacción igual y opuesta resultante del desplazamiento de la masa del medio. Todo ello se basa en el principio de conservación de la cantidad de movimiento de un determinado sistema. Aparte de este empuje, consecuencia de un desplazamiento de una masa de fluido, existe un empuje suplementario en los aviones con turbina de gas. Dicho empuje es consecuencia de un gradiente de presiones entre los gases a la salida de la tobera y la presión atmosférica. La poténcia cinética obtenida es: 9102 − 902 2 3& = 4 (6.11) donde Q es el caudal, V10 es la velocidad de los gases de la combustión a la salida y V0 es la velocidad del avión. © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 337 Por otro lado, la potencia de empuje es: Pe = V0F con F = Q(V10 - V0) (6.12) Así pues el rendimiento de propulsión es: η SURS = 3F 910 + 90 = 3H 290 (6.13) Si se desea un rendimiento de propulsión elevado, V10 ha de ser cercana a V0. Debería trabajarse con un gran caudal sin aportar demasiada energía. Por otro lado si V10 se acerca a V0 , la fuerza de empuje disminuye. Así pues, se ha de encontrar una relación de compromiso entre caudal y velocidad de salida En las aplicaciones estacionarias de la turbina de gas se obtiene potencia mecánica a través de un eje, movido por una turbina. En la aviación solamente el motor turbohélice o turboeje obtendrá la potencia a través de un eje, que le permitirá mover las hélices. En el resto de las aplicaciones aéreas se pretende acelerar los gases de escape de la turbina para obtener así el máximo empuje mediante la adecuación de la velocidad con una tobera, y sólo se obtendrá la potencia mecánica necesaria para mover el compresor. Esta energía mecánica se obtiene de la misma forma que en las aplicaciones estacionarias, es decir, a través del eje que une la turbina y el compresor de una turbina de gas. Se distinguen tres casos en las aplicaciones aéreas: - el turborreactor - el turboventilador o turbofán. - el turbohélice o turboeje 6.7.1 El turborreactor En el turborreactor la turbina se diseña para desarrollar justamente la potencia imprescindible para accionar el compresor. A continuación los gases de escape se expanden hasta la presión atmosférica en una tobera propulsiva, dando lugar a un chorro de gases de gran velocidad. En la figura 6.35 se esquematiza la configuración de un turboreactor, cuyos elementos básicos son: - el difusor - la unidad generadora de gases - la tobera El difusor es el primer elemento con que se encuentra el aire al entrar al motor, y donde se aumenta la presión estática y disminuye la velocidad de este. La unidad generadora de gases está formada por el compresor, la cámara de combustión, y la turbina que son los elementos comunes en todas las aplicaciones de los motores de turbina de gas. © Los autores, 2002; © Edicions UPC, 2002. 338 Máquinas térmicas motoras La tobera, como ya se ha comentado, aumenta y adecuala velocidad de los gases de escape para mejorarla propulsión, opera adiabáticamente, pero de forma irreversible y con una eficiencia de propulsión baja, excepto a altas velocidades de vuelo, donde la velocidad de salida de los gases se aproxima a la del avión. cámara de comb. difusor turbina compresor tobera cámara de comb. Fig. 6.35 Elementos básicos de un Turborreactor 6.7.2 El turboventilador Para aumentar la eficiencia en propulsión, debe disminuirse la velocidad de salida de la tobera. En el turboventilador se disminuye la velocidad de salida de los gases extrayendo más potencia en la turbina, sin aumentar la potencia requerida para impulsar el compresor. Este aumento de potencia se utiliza para comprimir aire adicional, el cual se envía a la tobera sin pasar por la cámara de combustión. Así, se disminuye la velocidad de salida de los gases por la tobera, aumentando el rendimiento propulsivo, y sin aumentar la cantidad de combustible suministrada al motor, se aumenta la masa de aire del chorro de gases con el consiguiente aumento del empuje que ello significa. Un turboventilador es un turborreactor donde se han eliminado algunas etapas de la parte delantera del compresor, y se han sustituido con etapas de mayor diámetro denominadas ventiladores. Es una gran ventaja que en éste tipo de motores pueda lograrse un gran aumento del impulso añadiendo un ventilador a un turborreactor ya existente. Podemos distinguir dos tipos generales de turboventiladores: - turboventiladores sin mezcla o de flujo separado - turboventiladores de flujo mezclado En los turboventiladores sin mezcla o de flujo separado (Fig 6.37a), el aire procedente del ventilador es enviado por un conducto hasta una tobera propia, independiente de la tobera utilizada por los gases de escape de la turbina. En los turboventiladores de flujo mezclado (Fig 6.37b), los gases de escape y el aire procedente del ventilador son mezclados antes de pasar por la tobera. La presión estática en el punto de mezcla debe ser la misma. © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 339 Fig. 6.36 Turboventilador de un turboreactor de aviación. tobera aire tobera ventilador cámara comb compresor turbina aire gases de scape tobera Fig. 6.37 a) Turboventilador sin mezcla aire tobera de escape cámara comb ventilador compresor turbina gases de scape aire Fig.6.37 b) Turboventilador de flujo mezclado © Los autores, 2002; © Edicions UPC, 2002. 340 Máquinas térmicas motoras Las desventajas de este motor son el peso, considerablemente superior, y su mayor diámetro. Algunas técnicas para aumentar aún más el impulso serían: - El aumento de la relación de compresión del ventilador El aumento de la relación de compresión total Aumentar la relación de desvío Incrementar la temperatura de los gases a la entrada de la turbina Al aumentar la relación de compresión en el ventilador, mediante una etapa adicional en éste, por ejemplo, también se requerirá más potencia en el eje, con lo que es probable que también sea necesario añadir alguna etapa en la turbina. Aumentar la relación de compresión total, en el compresor y en el ventilador, puede lograrse añadiendo más etapas de compresión, aumentando la velocidad de rotación, o con ambas cosas a la vez. El aumentar la relación de desvío, es decir, aumentando el diámetro del álabe del ventilador, conlleva un aumento de peso y de la potencia requerida por la turbina. Para aumentar la temperatura de los gases a la entrada de la turbina, será necesario el consiguiente rediseño de los álabes. 6.7.3 El turbohélice o turboeje En el motor turbohélice (Fig. 6.38), la propulsión se lleva a cabo mediante la acción combinada de una hélice situada en la parte delantera del motor y el impulso producido por los gases de escape procedentes de la turbina de gas. No es más que un turborreactor con la incorporación de una turbina que impulsa la hélice por medio de un sistema de engranajes reductor de la velocidad. hélice difusor cámara de comb. compresor turbina eje hélice turbina potencia par hélice gases escape tobera Fig. 6.38 Esquema básico del motor turboeje Se combinan en este motor las ventajas del turborreactor y la eficiencia en la propulsión de una hélice. El impulso de la hélice es aproximadamente el 90% del total del impulso a nivel del mar, aunque este porcentaje variará con la velocidad del aire, la altitud, los parámetros del motor, etc. El impulso es consecuencia del cambio de momento relativamente pequeño de una gran masa de aire. © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 341 El impulso del reactor es el restante (10%), y es debido al gran cambio de momento de una masa relativamente pequeña de gases. Una de las principales ventajas respecto a los dos motores vistos anteriormente es la relación del impulso con el consumo específico en un rango de velocidades bajas hasta subsónicas moderadas, y también durante la elevación. De todos modo, esta ventaja disminuye, pero a medida que aumentan la altitud y la velocidad. La eficiencia de la hélice se mantiene constante aproximadamente hasta velocidades cercanas al Mach 0,5 y cayendo a continuación rápidamente. Como consecuencia de ello, la velocidad de un avión impulsado por un motor turbohélice se verá fuertemente limitada. 6.7.4 Influencia de la velocidad del avión Al trabajar con fluidos compresibles, la velocidad de avance del avión tendrá un papel determinante en las turbinas de gas. Es importante recordar la definición del número de Mach (M), que no es más que el cociente entre la velocidad del fluido y la velocidad del sonido o sónica (que depende de la temperatura y la presión): - M=0, el flujo es incompresible M<1, el flujo es subsónico M=1, el flujo es transónico M>1, el flujo es supersónico El difusor, elemento que se incorpora a la entrada del motor de turbina de gas, está diseñado para que la velocidad del fluido disminuya a su paso, y la presión estática aumente, comprimiendo así el fluido antes de que éste llegue al compresor. En una tobera se pretende que la velocidad aumente y la presión disminuya. Para ello siempre se utilizan conductos de sección variable, aunque la forma geométrica de éstos no es siempre la misma y está en función de la velocidad del fluido que pasa a través de ellos. Así: - En un flujo subsónico el difusor es un conducto divergente y la tobera es convergente. - En el flujo supersónico tenemos los resultados contrarios, es decir, el difusor es convergente y la tobera divergente. - En el flujo transónico la variación del área de paso no modifica la velocidad ni la presión. El dispositivo de admisión, el difusor, es básicamente un conducto adiabático. A velocidades bajas actúa como tobera donde acelera el aire hasta la velocidad de entrada al compresor. A velocidades de avance normales actúa como un difusor, decelerando el aire y aumentando la presión estática. El rendimiento está en torno al 90 %. Cuando el avión no sobrepasa la velocidad del sonido, será suficiente con un difusor de geometría divergente. En aviones en que se pueden alcanzar velocidades supersónicas el conducto de admisión será compuesto por un conducto convergente seguido de uno de sección divergente, fijos o variables. © Los autores, 2002; © Edicions UPC, 2002. 342 Máquinas térmicas motoras El motivo es que para no dañar los álabes del compresor serán necesarias velocidades de entrada subsónicas. En la parte convergente lograremos disminuir la velocidad hasta valores en torno a Mach 0,8 para pasar luego, en la sección divergente, a velocidades próximas a Mach 0,5 En cuanto a las toberas, existen dos tipologías: Los dos tipos de tobera típicos en un sistema de propulsión son: - la tobera convergente. - la tobera convergente-divergente Fig. 6.39 Tobera convergente La forma básica que adopta la tobera convergente es la representada en la figura 6.39. A partir de la entrada la sección de paso empieza a disminuir hasta llegar a la garganta, o sección de paso más estrecha, situada justo antes de la salida de los gases o zona de descarga. La velocidad a la entrada de la tobera es insignificante porque la sección de paso es grande. Para estudiar el comportamiento de la tobera convergente, se supone que las condiciones de admisión se mantienen constantes y que el parámetro variable es la presión a la salida o zona de descarga. Al ir cambiando las condiciones a la salida de la tobera, y por tanto, al variar la diferencia de presiones entre la zona de descarga y la entrada de la tobera, el flujo reaccionará de un modo u otro al pasar por la tobera. Lógicamente, si la variación de presiones entre la entrada y la salida de la tobera es nula, no hay flujo, es decir, no hay paso de gases a través de la tobera. Al ir disminuyendo la presión de la zona de descarga con respecto a la presión de entrada de la tobera, el flujo sufrirá un aumento de velocidad, alcanzando la velocidad máxima en la zona de la garganta. En estas condiciones, la presión en la garganta es igual a la presión de la zona de descarga. A más gradiente de presión, conseguiremos más velocidad del flujo en la garganta de la tobera, y la presión en ésta será igual a la presión de descarga hasta que la tobera llegue a las condiciones de © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 343 ahogamiento. Se dice que la tobera está ahogada cuando el flujo llega a la velocidad sónica en la garganta (velocidad del sonido para éstas condiciones de presión y temperatura). La velocidad del flujo ha llegado a su máximo. Al llegar a ésta situación, una reducción posterior de la presión en la zona de descarga no tendrá ningún efecto sobre la presión en la garganta, la velocidad en el interior de la tobera o en el gasto másico (flujo de gases) que pasa por ella. Anteriormente se ha visto que la velocidad del fluido a su paso por una tobera convergente no podía sobrepasar la velocidad sónica. Para alcanzar una velocidad supersónica debe agregarse una sección divergente a la tobera convergente, tal y como vemos en la figura 6.40, obteniéndose una tobera convergente-divergente. garganta Fig.6.40 Tobera convergente-divergente Tal y como se ha visto anteriormente, es el gradiente de presiones entre la entrada y la salida de los gases a la zona de descarga el que acelerará el fluido. Mientras no se alcance la velocidad sónica del fluido en la garganta, la sección divergente que sigue a continuación actúa como un difusor y, por tanto, nunca se alcanzarán velocidades supersónicas en el conducto. A medida que la presión en la zona de descarga va disminuyendo respecto la presión de entrada, la velocidad del fluido a su paso por la garganta va aumentando, hasta el punto en que se consigue la velocidad sónica. Al llegar a este punto, y dependiendo de la presión de descarga, pueden pasar tres cosas: - Si la presión aumenta con respecto a la presión de la garganta, la velocidad no llegará a valores supersónicos y la presión en el conducto divergente aumentará. Si la presión de descarga es mucho menor, la presión en la sección divergente disminuirá y la velocidad en la región de descarga será supersónica. - Si el fluido se encuentra entre los dos casos anteriores, es decir, a una presión intermedia, la presión disminuirá durante una parte de la sección divergente, y la velocidad aumentará. En algún punto del conducto tendrá lugar una onda de choque normal, que conllevará un aumento de presión y una © Los autores, 2002; © Edicions UPC, 2002. 344 Máquinas térmicas motoras disminución de la velocidad, pasando ésta de supersónica a sónica en la misma onda de choque. Así, después que haya tenido lugar la onda de choque, la presión aumentará, y como ya se ha dicho, la velocidad disminuirá al aumentar la sección de paso. Las condiciones para que se formen las ondas de choque son la deceleración de un flujo supersónico. Ya se ha visto que en la tobera, mientras se trabaje con la relación de expansión para la que ha sido diseñada, no se formará ninguna onda de choque. - Si la presión de salida es mayor, la tobera expandirá en exceso el gas, con lo que deberá tener lugar una cierta recompresión y deceleración antes de que pueda ser descargado al exterior. Dicho proceso de recompresión sólo podrá ser realizado por una onda de choque en la sección divergente de la tobera. Así se concluye que cuando existe una deceleración desde velocidades supersónicas en un conducto divergente se forma una onda de choque. Es de sumo interés estudiar el rendimiento obtenido en una compresión producida por la onda de choque, pues puede utilizarse al comienzo de los dispositivos de admisión de los turborreactores cuando funcionan a velocidades de avance del avión supersónicas, y por tanto empezar a comprimir el aire antes de que éste pase por el compresor. 6.7.5 Inversores de empuje Los inversores de empuje se utilizan en turborreactores y turboventiladores para obtener un empuje negativo, es decir, un impulso de sentido contrario al del avance del avión. Se utilizan fundamentalmente para frenar el avión una vez ha aterrizado, aunque también sirve como freno para realizar maniobras de vuelo en algunos aviones y también para mover el avión hacia atrás en los hangares. Existen dos tipos básicos de inversores: - Bloqueo aerodinámico - Bloqueo mecánico El funcionamiento de los inversores de empuje por bloqueo aerodinámico (Fig. 6.41, Fig. 6.42 y Fig. 6.43) consiste en desviar la salida del aire y/o de los gases de escapes (según sea un turboventilador o un turborreactor), para obtener una componente negativa del impulso. El recorrido de los gases es modificado y se cambia el punto de expulsión a la atmósfera. aire invertido escape invertido inversor turbina gas entrada de aire ventilador inversor escape invertido aire invertido Fig. 6.41 Bloqueo aerodinámico © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 345 Fig. 6.42 Inversor de flujo Fig. 6.43. Detalle del inversor de flujo © Los autores, 2002; © Edicions UPC, 2002. 346 Máquinas térmicas motoras El bloqueo mecánico consiste en el taponamiento de los gases de escape, que se ven obligados a cambiar de dirección de salida, y así se obtendrá el empuje negativo. El bloqueo se hace de los gases que salen de la turbina, y puede hacerse a la salida del motor o justo antes de ésta. Todos los componentes necesarios para que se produzca el bloqueo se accionan mayoritariamente mediante sistemas neumáticos. Utilizando estos sistemas se obtiene un empuje negativo que representa entre un 30 y un 50 % del empuje neto total que puede obtenerse con los motores en sentido de avance. 6.7.6 Contaminación acústica La problemática de la contaminación acústica se concentra básicamente en el mundo de los aviones, y adquiere especial importancia en los momentos de aproximación a los aeropuertos (donde siempre se escogen rutas que pasen por el mar o zonas deshabitadas, para alejar el ruido de la población y como prevención sobre un hipotético caso de accidente), en los despegues, y en los aterrizajes. Existen dos fuentes generales de ruido: - Ruidos procedentes del sistema de propulsión - Otros ruidos, como podrían ser los causados por la fricción de los perfiles de la aeronave con el aire, el producido al romper la velocidad del sonido La fuente más importante, y la que permite alguna reducción considerable del nivel de ruido, son los ruidos ocasionados por el sistema de propulsión, que a la vez pueden agruparse en: - Ruidos generados en el exterior - Ruidos generados en el interior Los ruidos generados en el exterior son los asociados a los gases de escape al entrar en contacto con la atmósfera, o bien a la hélice, en el caso del turbohélice. Los ruidos de los gases de escape son debidos a la mezcla de dos corrientes de gas, una a gran velocidad y alta temperatura, y la otra a temperatura ambiente y velocidad casi nula como es el aire atmosférico. Al mezclarse se producen grandes turbulencias, y por tanto, ruido que va en aumento al incrementarse la diferencia de velocidades entre los dos flujos. En los motores turboventiladores sin mezcla el ruido es superior porque se tienen tres flujos en interacción, los gases de escape, el aire comprimido que no ha pasado por la cámara de combustión y la atmósfera. Los ruidos generados en el interior son producto del movimiento de la maquinaria y de la combustión, donde podemos distinguir entre el ruido del núcleo (integrado por el compresor, la cámara de combustión, y la turbina de expansión) y el ruido de los ventiladores (lo encontramos sólo en los turboventiladores) de origen similar al del compresor y de la turbina (producido siempre por la interacción entre el flujo y los álabes, que ocasiona turbulencias, presiones fluctuantes, y ondas de choque por las velocidades relativas supersónicas), y que es uno de los más importantes, a veces el de mayor intensidad. Las soluciones para disminuir el ruido, por lo general, suelen añadir costes, peso y longitud al motor original. Unas de las principales fuentes de ruido eran las del escape, y el ruido interno, como se ha comentado. © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 347 Para reducir los ruidos del escape, se debe reducir la velocidad de salida de los chorros de escape, efecto ya muy logrado para los aviones que utilizan los turboventiladores, que incluso incorporan mezcladores de flujo (el que ha sido desviado y el que ha pasado por la combustión) antes de la salida del motor. En el caso del ruido interno, éste se puede eliminar, y el método más efectivo consiste instalar un recubrimiento acústico a la entrada y salida del motor, sin añadir peso al avión. Para reducir el ruido también se podría disminuir la velocidad del ventilador (aunque conlleva un aumento de peso), o aumentar el espacio entre rotor y estátor (aunque se tiende a aumentar el espacio y el peso). 6.8 Regulación de la potencia La potencia de los motores de turbina de gas se regula mediante la cantidad de combustible que se inyecta en la cámara de combustión a través del control de la válvula por la que pasa el combustible. Al ser variable la entrada de combustible, también lo será la relación de la mezcla con el aire, y por tanto variar la entrada de combustible significará variar la temperatura de entrada a la turbina. El gasto másico o flujo de aire que pasa a través del compresor es el factor determinante en la regulación de la potencia. Dicho flujo variará con el cambio de la velocidad de giro del compresor, y dependerá de la relación de presiones. Podría variar también con la introducción de elementos en la entrada del compresor que variasen las secciones de admisión, pero éste sistema ha demostrado ser muy poco eficaz debido en parte a las exageradas caídas de presión que conllevaba su utilización. Dependiendo del tipo de turbina de gas, se opta por un u otro método en la regulación de la potencia, obteniéndose los siguientes casos significativos: - Unidades de un solo eje reguladas por la temperatura, a velocidad constante - Unidades de un sólo eje reguladas por la variación de la velocidad a temperatura constante - Unidades de un solo eje reguladas por al variación de la velocidad y la temperatura 6.8.1 Unidades de un solo eje reguladas por la temperatura, a velocidad constante En las unidades de un solo eje reguladas por la temperatura, el hecho de mantener constante la velocidad de giro de la turbina es una necesidad de la aplicación, motivado habitualmente porque las turbinas de gas están conectadas a una red eléctrica, y con tal de no modificar la frecuencia de los generadores eléctricos es necesario mantener constante la velocidad del eje. Para entender mejor la regulación se ofrece el gráfico de la figura 6.44. En se muestran representadas las curvas de operación de la turbina, para diferentes temperaturas de entrada, es decir, funcionando en las condiciones de diseño y también a carga parcial, cuando se disminuye la temperatura de entrada de la turbina. Estas temperaturas de entrada se modifican, como ya se ha comentado con anterioridad, variando la cantidad de combustible inyectado en la cámara de combustión. Al mantener la velocidad del eje constante y modificar la temperatura de entrada en la turbina, la potencia disponible en el eje será totalmente dependiente de dicha temperatura. Aparte de estas curvas aparece la curva característica del compresor, aunque sólo aparece una curva debido a que la velocidad de éste se © Los autores, 2002; © Edicions UPC, 2002. 348 Máquinas térmicas motoras mantiene constante. Entonces los puntos de corte son los puntos de funcionamiento del motor con potencia variable. Este modo de regular la potencia no es muy flexible si quiere mantener el rendimiento del compresor a niveles aceptables. Será útil, en cambio, cuando se requieran potencias poco variables, como en el caso de tener un número variable de unidades conectadas todas ellas al mismo sistema, siendo posible entonces trabajar cerca del punto de diseño. p T30 T3’ T3’’ 1 Fig. 6.44 Curvas de operación de la turbina, para diferentes temperaturas de entrada En la figura 6.45 se pueden observar las modificaciones del ciclo al modificar la temperatura de entrada de la turbina y mantener constante la velocidad de giro. Es apreciable también la variación de la potencia disponible al variar el área cerrada por las curvas que describen el ciclo del fluido de trabajo. 6.8.2 Unidades de un solo eje reguladas por la variación de la velocidad a temperatura constante La regulación de las unidades de un solo eje por la variación de la velocidad a temperatura constante es el caso inverso al anterior. Ahora la temperatura se mantiene constante a la entrada de la turbina mediante la regulación del flujo de aire, que es modificado a través de la velocidad del eje. © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 349 T 3 3’ 3’’ p2 2 4’’ 4’ 4 p1 1 s Fig. 6.45 Modificaciones del ciclo al modificar la temperatura de entrada de la turbina y mantener constante la velocidad de giro En este caso se tiene la ventaja respecto al caso anterior de que el rendimiento del compresor se mantiene en valores más elevados que en el caso anterior. En la figura 6.46 se observan los puntos de intersección entre la curva de operación de la turbina (sólo una por trabajar siempre a temperatura constante) y las curvas del compresor para distintas velocidades de giro, la intersección de las cuales nos muestra los puntos de operación del motor para potencias variables. En este caso el factor que regula la potencia es el flujo másico de gases que pasa por la turbina y no la temperatura de entrada con que llegan a ésta. Es obvio que éste método será muy útil siempre y cuando la aplicación receptora de la potencia no necesite unas velocidades de giro del eje constantes. En la figura 6.47 se observa la modificación del ciclo de trabajo que sigue el fluido motor al mantener la temperatura de entrada a la turbina constante y modificar el gasto másico. Es importante el detalle que si bien la temperatura de entrada a la turbina es la misma, no así en el caso de la temperatura de salida de los gases de escape, por lo que será interesante analizar la posibilidad de instalación de un regenerador. 6.8.3 Unidades de un solo eje reguladas por la variación de la velocidad y de la temperatura La regulación de las unidades de un solo eje por la variación de la velocidad y de la temperatura es de los dos casos anteriores, con las ventajas e inconvenientes que cada uno de ellos comporta. Sin embargo, se obtendrá mejor rendimiento si se mantienen niveles altos de temperatura. © Los autores, 2002; © Edicions UPC, 2002. 350 Máquinas térmicas motoras p Li ne al ím i te T30 A B C 1 0.90 0.95 1.00 N/N0 . m Fig. 6.46 Puntos de operación del motor para potencias variables 6.8.4 Regulación de unidades de dos ejes o eje partido Como ya se ha comentado, las unidades de eje partido disponen de una unidad generadora de gases, formada por el compresor y la turbina que obtiene la potencia necesaria para moverlo y la unidad de potencia, formada por una turbina que extrae la potencia útil a través de un eje. La regulación en este tipo de turbinas se lleva a cabo mediante la regulación de la velocidad de la turbina de potencia. Para ello, se puede: - Modificar el gasto de masa de gases. - Variar la temperatura de entrada de los gases a la turbina de potencia. - O realizar ambas cosas a la vez. Sin embargo, todos estos parámetros, temperatura, flujo... son consecuencia directa de lo que pasa en la unidad generadora de gases. Es decir, que la regulación de todos estos parámetros se lleva a cabo en la unidad inicial, que se encarga de la generación del gas y que puede ser tratada como una turbina de gas de un solo eje, cuya regulación ya está estudiada. Así pues se pueden aplicar los principios de regulación de la potencia de turbinas de gas de un solo eje para regular las de eje partido, obteniéndose por tanto gran flexibilidad de operación En la figura 6.48 se obtienen los puntos de trabajo como intersección de múltiples curvas de operación, tanto de la turbina como del compresor. © Los autores, 2002; © Edicions UPC, 2002. 6 Turbinas de gas 351 T 3’ 3 4’ 2 4 1 s Fig. 6.47 Modificación del ciclo de trabajo que sigue el fluido motor al mantener la temperatura de entrada a la turbina constante y modificar el gasto másico p Li ne a lím ite T30 A T3’ B T3’’ C 1 0.90 0.95 1.00 N/N0 . m Fig. 6.48 Puntos de trabajo como intersección de múltiples curvas de operación, tanto de la turbina como del compresor © Los autores, 2002; © Edicions UPC, 2002. 352 Máquinas térmicas motoras © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 353 7 Instalación de turbinas de vapor 7.1 Introducción La historia de las turbinas de vapor tal como se conocen en la actualidad se remonta a finales del siglo XIX (1884), cuando apareció la turbina más similar a lo que conocemos ahora. Fueron De Laval, inventor sueco (1845-1913) y de Parsons (1854-1931) contemporáneo suyo, quiénes crearon las primeras turbinas de vapor. En muchos otros casos es difícil atribuir a uno u otro la invención. La primera turbina de vapor de acción y de un solo escalonamiento fue la de De Laval. Presentaba una o varias toberas donde se conseguía la energía cinética justo antes de entrar en las paletas. La velocidad en este caso se podía controlar con la presión en la tobera, pero el problema residía en las altas velocidades que se alcanzaban al expansionar completamente el vapor (la velocidad periférica puede alcanzar los 350 m/s y las revoluciones alrededor de los 640 Hz o 38400 rpm). Esto obligaba a usar reductores en la salida del eje. Más adelante se fueron añadiendo escalonamientos para mejorarlas, se introdujo el árbol flexible y así aumentaron los rendimientos. Parsons usó desde los inicios los escalonamientos consecutivos en sus turbinas de reacción, formados por álabes fijos y coronas de álabes rotativos. En cada escalonamiento se convertía en energía cinética un pequeño diferencial de presión hasta llegar a la presión de escape. Así se podía trabajar a pequeñas velocidades. Los usos iniciales de estas turbinas (las primeras de reacción) fueron los grandes motores de barco, que precisaban de grandes potencias. El Turbinia fue el primer barco con una TV, botado en 1895. Aparte de aumentar la potencia (respecto las de De Laval), estas TV no precisaban de reductor y aumentaron notablemente el rendimiento económico de estas turbomáquinas térmicas. Antes de la 1ª Guerra Mundial aún se estaba muy lejos de los conocimientos actuales sobre el comportamiento de los metales a altas temperaturas. En ese momento se trabajaba con presiones moderadas (1.2-1.6 MPa) y temperaturas inferiores a 350 ºC. Entre 1915 y 1920 ya se consiguieron potencias de 20 MW y de 1920 a 1940 aumentaron las presiones hasta un rango de 12 a 17 MPa. Aparecieron las turbinas de condensación y de contrapresión (se descarga el vapor húmedo de la turbina a un condensador a una presión inferior o superior a la atmosférica respectivamente) y la producción combinada y aprovechamiento de energía eléctrica y energía térmica (cogeneración). Se generalizó el uso de aceros aleados y aumentó de nuevo notablemente el rendimiento económico de las TV al aumentar la temperatura de trabajo. Con la aparición de los aceros austeníticos se mejoraron las prestaciones llegando a trabajar hasta unos 35 MPa y temperaturas iniciales de entre 500 y 580 ºC. © Los autores, 2002; © Edicions UPC, 2002. 354 Máquinas térmicas motoras La revolución aportada en el sector por la energía nuclear causó la aparición de turbinas adaptadas a estas instalaciones debido al diferente estado inicial del vapor respecto las centrales con una aportación de energía de origen fósil. En la actualidad se construyen calderas que trabajan en condiciones supercríticas por encima de 600 ºC y 35 MPa. La turbina de vapor es en la actualidad uno de los motores más versátiles en cuanto a sus aplicaciones. La máquina acoplada a la TV puede ser accionada directa o indirectamente por la turbina a través de un reductor de velocidad (con mucha frecuencia transmisión mecánica por engranajes). Existen básicamente dos tipos de aplicación para la turbina de vapor, las aplicaciones industriales y la generación de energía eléctrica. 1. Turbinas industriales En su mayoría están formadas por un solo cuerpo, y de ellas se obtienen potencias superiores a los 0,1 MW e inferiores a los 150 MW. Las presiones de vapor son inferiores a los 150 bar y las temperaturas son también inferiores a los 550ºC a la entrada de la turbina. Las velocidades de giro se encuentran entre las 3000 y las 16000 revoluciones por minuto. De entre todas ellas se pueden distinguir: - TV de contrapresión, empleadas muy habitualmente para la cogeneración - TV de pequeña y mediana potencia para el accionamiento de bombas, compresores - TV de condensación destinadas a la producción local de energía eléctrica La turbina de vapor es el motor número uno en importancia para la generación de la energía eléctrica, tanto en centrales de combustible fósil (carbón o derivados del petróleo) como en las de combustible nuclear. Una prueba de ello es que un 75% de la energía eléctrica del mundo proviene de centrales térmicas, con la TV jugando un papel preponderante. Las centrales térmicas pueden clasificarse según el tipo de carga: - Centrales para carga punta, que se arrancan y paran varias veces al día. Durante el año trabajan unas 2500 horas aproximadamente. Para conseguir la mayor economía en este tipo de centrales, la central diesel sería la más eficiente, seguida de la central con turborreactores y de la central con turbinas de gas. - Centrales para carga intermedia, que se paran por la noche y en los fines de semana. Funcionan entre unas 2000 y unas 5000 horas al año, produciéndose unos 300 arranques durante el año. En este tipo de centrales la mayor economía se consigue con turbina de vapor simple sin recalentamiento, seguida de las TV con recalentamiento y de las centrales de vapor antiguas que funcionaron para carga base. - Centrales de carga base, que funcionan ininterrumpidamente y a plena carga, de 4000 a 8760 horas al año. La mayor economía para este tipo de centrales se consigue, en primer lugar, con las © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 355 centrales hidroeléctricas, seguidas de las centrales nucleares, que preceden a las centrales de vapor sofisticadas. 7.2 Ciclos para la obtención de potencia en una instalación de turbinas de vapor 7.2.1 Propiedades del vapor El vapor de agua es el fluido utilizado en las trubinas de vapor, es por lo tanto necesario hacer una breve descripción de sus propiedades que hacen tan extendida su utilización. El vapor de agua no puede considerarse como un gas perfecto ya que sus propiedades difieren del gas ideal, y no se pueden utilizar las ecuaciones de gas ideal para el vapor sobrecalentado. Por otro lado las ecuaciones de gas real que rigen el comportamiento del vapor no sobecalentado son complicadas y es por eso que se utilizan tablas termodinámicas y diagramas, ya sean Pv, Ts o de Mollier, Hs. 1. Diagrama Pv El diagrama Pv es el que nos indica con más claridad las propiedades del vapor de agua (Fig. 7.1) Gas P C Curva saturación líquido-vapor Vapor Vapor+líquido Líquido O V Fig. 7.1: Diagrama Pv a) Punto O Este punto determina el punto triple del agua, es decir, el punto donde se encuentran al mismo tiempo el estado sólido, líquido y vapor del agua y por lo tanto las tres fases se encuentran en equilibrio. A este © Los autores, 2002; © Edicions UPC, 2002. 356 Máquinas térmicas motoras punto corresponden una temperatura to de 0.01ºC, una presión Po de 0.0061173 bar y un volumen específico Vo de 0.00100022 m3/Kg. En este punto se ha establecido por convención que tanto la entalpía como la entropía específica son igual a cero. b) Punto C Este punto corresponde al punto crítico del vapor. En el estado crítico en un instante el líquido puede transformarse en vapor saturado o viceversa. La temperatura crítica Tc es el límite por encima del cual no podremos obtener agua líquida por simple compresión. Por encima de este punto, tendremos gas. los valores de los parámetros en el punto crítico son: tc= 374.1ºC, Pc = 221.2 bar, vc = 0.00317 m3/kg, hc = 2107 kJ/kg, sc = 4.4429 kJ/kg K. 2. Otros diagramas El diagrama Ts presenta un análisis cualitativo de los procesos y los ciclos termodinámicos, que se utilizará posteriormente para representar los ciclos termodinámicos del fluido de la turbina de vapor. El diagrama hs es útil para el cálculo de las propiedes del fluido a diferentes temperaturas y condiciones de presión. 3. Ebullición en masa de líquido La ebullición es el proceso por el cual el agua pasa de estado líquido a estado vapor. El proceso de ebullición tiene lugar en diferentes etapas, desde la primera aparición de burbujas de aire en las paredes de la caldera hasta la completa formación de vapor de agua. Al empezar a calentar la masa de agua se percibe la aparición de burbujas en la pared debido a los gradientes de temperatura respecto la pared caliente y el líquido. No se tratan de burbujas de vapor, puesto que todavía el líquido se encuentra a una temperatura inferior a la Tsat. Si se sigue calentand,el recipiente aumentará la temperatura del agua hasta llegar a la temperatura de saturación en las zonas cercanas a las paredes, donde empezará el cambio de fase. Se empiezan a formar las primeras burbujas que son indetectables a simple vista, pero al aumentar la tempertura del resto del fluido las burbujas crecen y se desintegran. Este tipo de ebullición se conoce como ebullición por nucleación subenfriada. Al seguir el calentamiento, las burbujas pasan de situarse solamente cerca de las paredes a subir hasta la superficie debido a la fuerza de empuje vertical que las libera. La transferencia de calor consiste entonces en el transporte de entalpía de cambio de fase por el vapor dentro de las burbujas; paralelamente las burbujas arrastran líquido caliente cercano a la pared, haciendo que el coeficiente de transferencia de calor aumente. Se tiene el régimen de ebullición por nucleación saturada, con burbujas aisladas. © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 357 Al prolongarse el calentamiento, aumenta el número de zonas donde existe la nucleación y al aumentar también el número de burbujas que se forman, éstas empiezan a fusionarse formando columnas de vapor. El vapor fluye hacia arriba a tal velocidad que el flujo del líquido que desciende provoca que no aumente la velocidad de ebullición. A esta condición se la conoce por punto de quemado destructivo y da lugar a un flujo de calor por unidad de área máximo, q max. Logq q max m qmin Ta Tb Log +T +T = Tpared - Tsat Fig.7.2 Curva de ebullición La zona de quemado catastrófico se alcanza cuando se aumenta la potencia q hasta llegar al valor de q max. Esta situación se vuelve inestable de tal modo que al efectuar un pequeño incremento de potencia provoca un aumento de la temperatura. De hecho el fluido seguirá la curva de ebullición de tal modo que después de superar el valor de potencia máxima q max, un pequeño incremento de potencia significará pasar de temperatura Ta a una Tb muy superior. Este gran aumento de temperatura puede tener consecuencias terribles para la caldera en el caso de que Tb se acerque o supere a la temperatura de fusión de las paredes de la caldera. © Los autores, 2002; © Edicions UPC, 2002. 358 Máquinas térmicas motoras Para evitar problemas se deberá controlar los incrementos de tempreatura y, por lo tanto, controlar los aumetnos de potecia aportada al fluido a través de la caldera. 7.2.2 Ciclo de Rankine ideal El ciclo de Rankine corresponde a un ciclo termodinámico ideal con los siguientes procesos o transformaciones reversibles, con dos transformaciones adiabáticas y dos isóbaras. T P’=cte 3 P=cte dP=0 2 dP=0 1 4 s Fig.7.3: Ciclo ideal Rankine Los procesos son las siguientes : a) Dos isóbaras 2 - 3 Aporte de calor a P=cte en el generador de vapor, caldera. Proceso en el que se observa la primera parte del calentamiento del líquido y una segunda de cambio de fase a T = cte 4 - 1 Extracción de calor en el condensador. Proceso en el que se produce el cambio de fase del fluido motor, de vapor a líquido b) Dos adiabáticas reversibles 3 - 4 Expansión del vapor en la turbina (con título X <1 desde el inicio de la expansión en este caso) 1-2 Compresión del fluido en fase líquida en la bomba © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 359 1. Trabajo y potencia Considerando que se trata de un sistema abierto, la energía intercambiada es la variación de entalpía en las entradas y salidas de las máquinas, ya que en este ciclo ideal consideramos que tanto los procesos de la turbina como de la bomba son adiabáticos. El trabajo teórico será: : = P ⋅ ( K4 − K3 + K2 − K1 ) (7.1) W Rendimiento térmico será: η= K2 − K1 + K3 − K4 K3 − K2 (7.2) : P ⋅ T1 (7.3) η= W 7.2.3 Ciclo Rankine real, rendimiento isoentrópico T 3 TH 3r 2r 2 TL 1 4 4s 4r S Fig. 7.4 Diagrama T-S de un ciclo real de Rankine con turbina de vapor © Los autores, 2002; © Edicions UPC, 2002. 360 Máquinas térmicas motoras En el ciclo ideal el proceso era irreversible, pero en la realidad diversas pérdidas (originadas por la fricción, por choques del vapor con los álabes, por recirculación del fluido...) hacen que los procesos del ciclo real sean irreversibles, que la expansión y la compresión no sean adiabáticas, y que la obtención del vapor y la condensación no sean exactamente a presión constante. Todo ello disminuirá el rendimiento térmico del ciclo, y para evaluar el grado de irreversibilidad del proceso se definen los rendimientos internos de la turbina y de la bomba, respectivamente, que medirán la capacidad de la máquina para intercambiar energía con el fluido. Estos rendimientos comparan el trabajo obtenido de la expansión real con el que se obtendría si el proceso fuese ideal, en el caso de la turbina, el trabajo suministrado a la bomba en el proceso ideal con el suministrado en el proceso real, en el caso de la bomba. La expresión del rendimiento interno o isentrópico para la turbina es, observando la Fig.7.10: η 7, = : : 75($/ 5(9 = K4U − K3U K4 V − K3U (7.4) 7.2.4 Ciclo de Rankine con sobrecalentamiento El ciclo se modifica al sobrecalentar el vapor saturado seco que sale de la caldera, alcanzándose una temperatura superior, ver figura 7.5. Con esta modificación se obtiene una expansión con un vapor de mayor calidad, puesto que el título de salida es netamente superior al ciclo básico. Se obtiene un incremento del rendimiento manteniendo el ciclo dentro de los mismos límites de presión, ya que se incrementa la temperatura del vapor, y como consecuencia, también su entalpía (h). La limitación será la resistencia al calor de los álabes. Si se quiere una temperatura de entrada a la turbina alta con un título elevado a su salida, la presión de entrada a la turbina no puede ser muy alta si a la vez se quiere una presión baja de salida de la turbina, a no ser que se utilice el recalentamiento intermedio, como se verá más adelante. En el ciclo de Rankine, tanto el ideal como el real, la expansión del vapor en la turbina se efectuaba en la zona difásica, donde la presencia de dos fases hace que las densidades de cada una sean muy diferentes. Esto provoca un rendimiento isentrópico muy bajo. Para aumentar dicho rendimiento se realiza un calentamiento desplazando el punto 3 de entrada en la turbina en la zona de vapor recalentado; de esta manera, la expansión del vapor en la turbina se realiza casi en su totalidad en una sola fase, dejando una pequeña parte en la zona difásica que corresponde a las últimas coronas de álabes de turbina. © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 361 T PH 3 QH PL TH 2 TL 1 4 QL S Fig. 7.5 Diagrama T-S del ciclo de Rankine ideal con calentamiento En primer lugar el proceso 1-2 el fluido de trabajo sufre una compresión adiabática (sin pérdidas de calor). El trabajo necesario en la compresión se puede expresar como: :& = P(K2 − K1 ) (7.5) A continuación se genera el vapor, en una caldera ( proceso 2-3). El primer paso es calentar hasta la temperatura de saturación, para seguir con el proceso de evaporación. Todo ello se realiza a presión constante, y la expresión del calor necesario es: 4+ = P(K3 − K2 ) (7.6) Seguidamente se obtiene el trabajo aprovechable (3-4), debido a la expansión adiabática del vapor en la turbina, y que no es más que: :7 = P(K3 − K4 ) (7.7) Finalmente, el vapor se condensa (4-1), a presión constante cediendo calor: 4 / = P ( K1 − K 4 ) El rendimiento térmico del ciclo teórico no es más que la relación entre el trabajo neto obtenido y el calor cedido. El trabajo neto es el obtenido en la expansión menos el necesario para la compresión, aunque a efectos prácticos este último no se tiene en cuenta. Así se tiene el rendimiento: ηW = : 1(72 = :7 = P(K3 − K4 ) 4+ 4+ P(K3 − K2 ) = K3 − K4 K3 − K2 © Los autores, 2002; © Edicions UPC, 2002. 362 Máquinas térmicas motoras Cuando menor sea la presión en el condensador, mejor será el rendimiento obtenido, al hacerse el ciclo más grande, aunque dicha presión deberá ser mayor que la presión de saturación a temperatura ambiente (para el buen funcionamiento del condensador). Para mejorar el rendimiento también se puede sobrecalentar el vapor a la salida de la caldera, que además aumentará el título a la entrada del condensador. Sin embargo, las temperaturas de entrada a la turbina deberán ser inferiores a los 600ºC. Por último, y con tal de aumentar el rendimiento, se puede aumentar la presión en la caldera, aunque el trabajo neto puede disminuir y se reduce el título a la entrada del condensador, que por deficnición conviene que sea alto para que los últimos escalonamientos de la turbina trabajen correctamente, para lo que se precisa poco fluido en fase líquida. 7.2.5 Ciclo de Rankine con recalentamiento intermedio Esta modificación soluciona el problema de trabajar con presiones y temperaturas de entrada a la turbina altas, y que no era otro que la consiguiente caída a zonas húmedas al finalizar la expansión, obteniéndose como consecuencia un vapor de baja calidad. Para elevar el rendimiento conviene trabajar con presiones y temperaturas de entrada a la turbina altas y con presiones de salida bajas, pero sin caer en zonas húmedas. En los casos anteriores ello no era posible. QH CALDERA WT1 Turb.1 CONDENSADOR QL Fig. 7.6 Ciclo con recalentamiento intermedio © Los autores, 2002; © Edicions UPC, 2002. WT2 Turb.2 7 Instalación de turbinas de vapor 363 PH T PI QH PL QL S Fig. 7.7 Diagrama T-S de un ciclo de Rankine con recalentamiento intermedio Sin embargo, en este caso, la expansión del vapor se realiza con uno (recalentamiento simple) o varios etapas (recalentamiento múltiple), volviendo a calentar el vapor en las fases intermedias, a presión constante, y generalmente hasta una temperatura igual a la del inicio de la expansión (Fig. 7.7). Todo ello permite cumplir con los requerimientos anteriores. Además se ve aumentado el trabajo neto generado, aunque si la presión intermedia (antes de recalentar) es demasiado baja, el rendimiento del ciclo puede verse afectado con una disminución hasta valores inferiores a los obtenidos sin recalentamiento intermedio. 7.2.6 Ciclo de Rankine con regeneración Consiste en la extracción de calor de algún elemento del ciclo distinto de la caldera, para dársela al fluido en otra parte. Lo más usual es extraer el calor de la turbina de vapor, y se destina a precalentar el agua antes de que ésta entre a la caldera mediante intercambiadores de calor o regeneradores, consiguiendo así reducir el aporte de calor necesario por parte de la caldera. Sin embargo, se reduce la potencia de la turbina ya que la cantidad de vapor en la expansión es menor, aunque al disminuir el calor gastado aumenta el rendimiento del ciclo. QH CALDERA 3 8 6 CONDENSADOR 10 QL 9 2 1 Fig. 7.8 Ciclo de Rankine con regeneración © Los autores, 2002; © Edicions UPC, 2002. 364 Máquinas térmicas motoras T P3 P6 P8 3 10 9 6 2 8 1 S Fig. 7.9 Diagrama T-S de un ciclo con regeneración El título de vapor a la salida de la turbina puede quedar bastante reducido, lo que perjudica el buen funcionamiento de la turbina. Deberá tenerse en cuenta esta limitación. La regeneración puede tener una o varias etapas. 7.2.7 Ciclo de Rankine supercrítico La presión en la caldera es mayor que la presión crítica (220 bar para el agua) y durante el calentamiento a presión constante no se produce cambio de fase (Fig. 7.10). La principal ventaja es que no existen discontinuidades de fase, con lo que se obtiene una mejora del rendimiento. En este caso, el trabajo hecho por la bomba no es despreciable. El título de vapor a la salida de la turbina es bastante reducido, aunque con un recalentamiento intermedio podría solucionarse el problema. PH T QH PC 3 6 00 º C PL 2 1 QL 4 S Fig. 7.10 Diagrama T-S de un ciclo de Rankine supercrítico © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 365 7.3 Turbinas de vapor 7.3.1 Descripción En todas las instalaciones de turbina a vapor el fluido sufre los procesos de un ciclo termodinámico. En función de dichos porcesos los ciclos resultantes difieren unos de otros dependiendo del tipo de instalación y de las hipótesis simplificadoras utilizadas. El funcionamiento de una turbina de vapor no se puede separar ni concebir sino como un conjunto llamado instalación motriz de vapor, compuesta por la turbina propiamente dicha, un condensador, una bomba y una caldera de generación de vapor (Fig. 7.11). Calderín Turbina Caldera Intercambiador o Condensador Bomba Fig. 7.11 Esquema del ciclo de una TV La turbina de vapor es el motor térmico más grande que se fabrica. Es un motor de combustión externa, y por tanto, los gases de combustión no se mezclan con el fluido de trabajo (generalmente vapor de agua). El intercambio de energía se suele hacer en una caldera o en otros dispositivos. La turbina es capaz de convertir la energía térmica del fluido en energía mecánica en el eje de la máquina, ya que el fluido se somete a un ciclo termodinámico. El conjunto motor incorpora una unidad generadora del vapor, que © Los autores, 2002; © Edicions UPC, 2002. 366 Máquinas térmicas motoras puede ser una caldera, donde se procede a la combustión de algunos de los elementos combustibles posibles (carbón, fuel, gas natural,...); para la obtención de energía para calentar el agua y obtener el vapor se puede aprovechar directamente cualquier otra forma de energía, como la solar o la geotérmica, sin pasar por alto la energía nuclear. Aparte de la caldera, el motor está formado por una turbina, donde tiene lugar la expansión de los gases y, por tanto, donde se obtiene la potencia útil. También se halla un condensador de vapor y una bomba por la que el fluido (en este punto condensado) adquirirá la presión de la caldera. Aparte encontramos muchos accesorios para el correcto funcionamiento del conjunto motor. Según las múltiples clasificaciones comentadas anteriormente, la turbina es una turbomáquina térmica (de acción o reacción), usada siempre como motor y normalmente de geometría axial. Aunque menos, también se usan las configuraciones radiales para potencias menores. Una de las aplicaciones más importantes de la turbina de vapor es la generación de energía eléctrica en las plantas termoeléctricas, donde se transforma la energía calorífica liberada en una combustión en energía eléctrica. Aproximadamente el 60% de la energía eléctrica generada en el mundo es a través de la turbina de vapor. La energía hidroeléctrica representaría un 30%, mientras que el 10% restante corresponde a la generación mediante motores diesel, turbinas de gas, y otros dispositivos orientados al aprovechamiento de energías renovables. El empleo del vapor como fluido de trabajo se debe a su capacidad de recibir y ceder energía (como tantos otros fluidos), pero fundamentalmente porque es abundante y fácil de manejar (con un ciclo de transformación líquido-vapor-líquido dentro de unos valores de temperatura aceptables). Algunas propiedades características de la turbina de vapor son: -En una turbina de vapor la potencia unitaria realizable es prácticamente ilimitada, mientras que en otro tipo de motores la potencia que se puede obtener está acotada tecnológicamente, como en el caso de los motores diesel, con un límite aproximado que ronda los 50 MW. -La potencia específica (potencia por unidad de peso o volumen) es unas diez veces superior que en los motores diesel. -El rendimiento global de las turbinas de vapor está en torno al 35%. -La fiabilidad ha ido en aumento durante todo el tiempo de evolución, disminuyendo los plazos entre revisiones, al mismo tiempo que se han ido haciendo más compactas y ha aumentado constantemente su potencia específica. -El precio por KW instalado (incluyendo construcción, instalación, y mantenimiento) disminuye en general al aumentar la potencia de la unidad, resultando más económica la construcción de una gran turbina de vapor que la de varias más pequeñas para suministrar una potencia determinada. Existen también muchos criterios de clasificación dentro de las turbinas de vapor, que básicamente son: 1. Según la dirección que adopta el flujo: -TV axiales, que son las más generalizadas, y que se componen de varios pasos o escalonamientos. Dentro de las axiales existen las turbinas de impulso o acción y las turbinas de reacción. En las © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 367 turbinas de impulso se tiene un primer cuerpo de alta presión, donde se hallan los escalonamientos de velocidad, y en uno o varios cuerpos de baja presión se hallan los escalonamientos de presión. En máquinas de gran potencia también se incluirían escalonamientos de reacción. 2. Según las diferentes aplicaciones del vapor de salida: - TV de condensación, en que la presión de salida del vapor es inferior a la presión atmosférica (del orden de 30 a 60 mbar), y éste se descarga a un condensador. Es la turbina más habitual en las centrales termoeléctricas convencionales. - TV de escape libre, en que la presión de salida del vapor es la atmosférica. - TV de contrapresión, con presiones de descarga del vapor de algunos bar por encima de la presión atmosférica, por tal de aprovecharlo para otros usos. Muy usadas en cogeneración. 3. Según la velocidad de giro: - TV de alta velocidad, utilizadas normalmente para la impulsión de sistemas mecánicos, como son compresores, bombas... - TV de baja velocidad, generalmente destinadas a mover alternadores para la generación de energía eléctrica, y con velocidades desde 1800 a las 3000 revoluciones por minuto. 4. Según la presión del vapor a la entrada de la turbina: - TV de baja presión, con valores hasta los 1 MPa. - TV de media presión, con presiones desde los 1 hasta los 8,8 MPa. - TV de alta presión, desde los 8,8 hasta los 22,4 MPa. - TV de muy alta presión, para valores superiores. 5. Según la temperatura del vapor a la entrada de la turbina: - TV de vapor saturado. - TV de temperatura media (hasta los 485ºC). - TV de alta temperatura, con valores desde los 485 hasta los 565ºC. - TV de muy alta temperatura, para valores superiores. 7.3.2 Tipologías de turbinas de vapor Turbinas axiales de impulso (acción): El rotor de la turbina está provisto de álabes, a los que precede una serie de toberas de alimentación tipo convergente-divergente, que convierten energía de presión en energía de velocidad, prácticamente sin perder energía, para así tener chorros de vapor de alto poder dinámico que atacan directamente los álabes del rotor y lo hacen girar. En el rotor la presión se mantiene constante y disminuye la velocidad del vapor. © Los autores, 2002; © Edicions UPC, 2002. 368 Máquinas térmicas motoras Es muy difícil aprovechar toda la energía cinética de los gases en un solo escalonamiento en la turbina, debido a las altas velocidades de salida en la tobera, que obligarían al rotor a girar a más de 20.000 revoluciones por minuto, y en consecuencia, dado el diámetro de la máquina, se producirían zonas donde la velocidad periférica sería supersónica, condición que debe evitarse. En caso de porducirse se tendrían discontinuidades en la presión, la densidad y la temperatura del fluido (onda de choque). Con el escalonamiento se lograrán velocidades de giro mucho más bajas y, por tanto, se reducirán los problemas ocasionados por las vibraciones. Turbinas axiales de reacción: En los estatores el fluido de trabajo se acelera, ganando velocidad a expensas de la presión. En los rotores, los gases ceden energía de velocidad y también de presión. Las velocidades de incidencia del fluido en los álabes son menores que en las turbinas de impulso. Cuando en un mismo eje hallamos turbinas de impulso y de reacción a la vez, el diámetro de los rotores ha de ser mayor en éstas últimas, para mantener la misma velocidad angular. Debido a la progresiva caída de presión, los álabes deben irse haciendo más grandes para lograr acciones equivalentes en los distintos escalonamientos, puesto que los rotores van montados todos sobre el mismo eje. Escalonamiento de velocidad: Consiste en aprovechar la energía cinética de los gases en varios pasos, obteniendo así unas velocidades de giro más bajas. En el estator, tanto la presión como la velocidad del vapor permanecen constantes. En el rotor, el vapor cede parte de su energía cinética y la presión sigue manteniéndose constante. En todos los escalonamientos se obtiene la misma potencia, ya que todos tienen las mismas velocidades angulares, al ir montados sobre el mismo eje y al ir aumentado las superficies activas a medida que el fluido va perdiendo energía. velocidad Presión D1 1 R1 D2 2 R2 D3 3 R3 D4 4 R4 D5 R5 5 Escalonamientos Fig. 7.12 Escalonamientos de velocidad; D: álabes estáticos directrices o directores: R: álabes del rotor © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 369 Escalonamiento de presión: Presión velocidad D1 R1 D2 R2 1 2 D3 R3 3 D4 R4 4 D5 R5 5 Escalonamientos Fig. 7.13 Escalonamientos de presión; D: álabes estáticos directrices o directores: R: álabes del rotor El estator en este caso adopta las mismas funciones que una tobera, es decir, el vapor disminuye la presión a cambio de ver aumentada su velocidad. El rotor mantiene constante la presión del vapor, pero éste cede parte de su energía cinética al disminuir la velocidad. La capacidad de conversión de energía del fluido en energía del rotor es mayor en los escalonamientos de velocidad, necesitan menos etapas, aunque en los escalonamientos de presión se pueden lograr mejores rendimientos globales y velocidades de giro menores. Turbinas de vapor radiales: Las ventajas de las TV radiales sobre las axiales son su gran compacidad y que la carcasa no está sometida a grandes presiones, con lo que se consigue abaratar los costes de construcción, pero su uso es minoritario. Son turbinas en las que el flujo tiene la dirección del radio de la turbina, pudiendo ser su sentido hacia el eje (de flujo centrípeto) o bien hacia la periferia (de flujo centrífugo). Tiene una mejor transferencia de energía, aunque presenta graves problemas con fluidos compresibles. Para el mismo tamaño de máquina permite tener potencias mayores que las de flujo axial, aunque suelen ser turbinas de pequeña potencia comparadas con las axiales, con valores inferiores a los 10000 KW. Al no haber escalonamientos internos, se requerirán 2 o más TV en serie Turbinas de vapor de flujo múltiple: Estas turbinas dividen el flujo principal del vapor en dos o más flujos en los cuerpos de baja o media presión. Con ello se pretende aumentar la capacidad de la máquina sin aumentar el número de revoluciones a que gira el motor, normalmente limitado. Al aumentar la capacidad, se aumentará también la potencia. © Los autores, 2002; © Edicions UPC, 2002. 370 Máquinas térmicas motoras 7.3.3 Principio de funcionamiento Los componentes básicos de la turbina son: -Los álabes, que son la parte de la turbina encargada de transformar la energía de presión en momento de torsión sobre el eje. La longitud de los álabes y el diámetro del escalonamiento han de aumentar progresivamente a lo largo de la turbina, porque el volumen específico del vapor aumenta. -Cuerpo del rotor, que es el portador de los álabes móviles de la turbina. -Rotor, es una de las partes con más solicitación térmica y mecánica. Puede construirse mediante unión soldada o por forja de un único bloque. -Carcasa, que ha de estar diseñada para soportar las reacciones de las toberas y los álabes estacionarios. -Accionador del rotor, que es el dispositivo de arranque de la turbina. -Estator (tobera), que está formado por los álabes fijos. -Dispositivos auxiliares, tales como los que desempeñan la lubricación, la refrigeración; son similares a los de las TG. La turbina de vapor como elemento del ciclo es donde se transforma la energía que lleva el fluido en energía mecánica en el eje de salida de la turbina. Cada turbina presenta geometrías distintas (orientación de los álabes fijos o móviles, secciones de tobera, escalonamientos....) en función de las propiedades del vapor en la entrada de esta. Entrada vapor Salida vapor Fig 7.14 Esquema turbina © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 371 El funcionamiento de las TV se basa en el teorema del momento cinético y más concretamente en la ecuación de Euler. Teorema del momento cinético aplicado en un volumen de control Siendo: ∆m: Cantidad de masa en nuestro volumen de control V1, V2: Velocidades absolutas de entrada y salida del fluido respectivamente V1u, V2u: Proyecciones de las velocidades del fluido en la dirección de la velocidad del rodete u1, u2: Velocidad del rodete en la entrada y en la salida r1, r2: Radios de entrada y de salida (iguales en turbinas axiales) σ: Momento cinético en A'B ζ: Momento cinético resultante en el volumen de control M: Momento resultante de las fuerzas externas, debido a la variación del momento cinético resultante V1 A X-X’ A’ O V2 W U2 U1 B’ B Fig. 7.18 Gráfico del Ta momento cinético El momento resultante M, és el momento total que el fluido ejerce sobre el volumen de control al cambiar su dirección. Las fuerzas que realiza el fluido sobre las paredes que lo direccionan realizan un momento debido a que están aplicadas a una distancia que es el radio de giro. Este momento es el que recibe la turbina en su eje, el que podría ser totalmente aprovechado por esta si no hubiera pérdidas mecánicas. ∂ξ = ∂ W 0 © Los autores, 2002; © Edicions UPC, 2002. 372 Máquinas térmicas motoras El momento cinético resultante con el volumen de control AB es la variación del momento cinético efectuada por el líquido durante su desplazamiento durante un cierto dt. La masa de control se habrá desplazado de AB a A'B'. ξ = 0 .FLQpWLFR$$ ’− 0 .FLQpWLFR%% ’ (7.8) El momento cinético σ en A'B se anula ya que és el momento cinético que se ejerce en el mismo volumen de control por la misma cantidad de masa en ambos instantes. ξ = (U1 ⋅ ∆P ⋅ 91X + σ ) − (U2 ⋅ ∆P ⋅ 92X + σ ) (7.9) ∆P ⋅ ((U1 ⋅ 91X ) − (U2 ⋅ 92X )) ∆W (7.10) El par en XX' sería: 0= 0 = * ⋅ ((U1 ⋅ 91X ) − (U2 ⋅ 92X )) Donde G es el gasto másico del vapor. La potencia es P=M·w y las velocidades del rodete u1 y u2 quedan determinadas por la velocidad angular w de este. X1 = ϖ ⋅ U1 X2 = ϖ ⋅ U2 3 = * ⋅ [(X1 ⋅ 91X ) − (X2 ⋅ 92X )] (7.11) Por otro lado, la ecuación de Euler en las TV se expresa normalmente en función de la entalpía. Si se hace el supuesto que Q=0 y que ∆gz=0 (energía potencial constante) y que ∆F2 ≅ 0, 2 entonces simplificando la ecuación general queda: :H% = 4H% + (KH + K% ) + : H% FH 2 − F% + J ⋅ (]H − ] % ) = 2 2 = ∆K © Los autores, 2002; © Edicions UPC, 2002. : X (7.12) 7 Instalación de turbinas de vapor Donde : =: H% X 373 y representa el trabajo de la entrada de la turbina al punto B o lo que es lo mismo, el trabajo del rodete por unidad de masa. Triángulos de velocidad El comportamiento del fluido dentro de los álabes fijos y móviles de la turbina se esquematiza normalmente con la ayuda de estos triángulos de velocidad, que dependen totalmente de la geometría, los materiales usados (rugosidad), pérdidas de carga... Se diferencian los casos de turbina de acción de los de turbina de reacción. Y Y α β Z X X α β Y β α Z X β α Z Y Z X X Fig.7.15 Triángulos de velocidad para TV acción. Y α β Z X Y α β Y β α X Z β α X Fig.7.16 Triángulos de velocidad para TV reacció. © Los autores, 2002; © Edicions UPC, 2002. X Z Y Z X 374 Máquinas térmicas motoras Caso del álabe simétrico y del álabe asimétrico El diseño del álabe se adapta a la dirección de W1. Si ß1=ß2, estamos delante el caso simétrico. : β2 β1 : Fig.7.17 Álabe con simetría : β β2= : Fig.7.18 Álabe con asimetría © Los autores, 2002; © Edicions UPC, 2002. © Los autores, 2002; © Edicions UPC, 2002. 376 Máquinas térmicas motoras η= 4N 4D (7.14) ⋅ 4 N = $ ⋅ 3 = $ ⋅ * ⋅ X (9 1 X − 9 2 X ) ⋅ ⋅ 4D = *⋅ ∆K = $ ⋅ *⋅ ηN = 2 ⋅ 9D2 2 X (91X − 92X ) 2 ⋅ X (91 ⋅ cosα1 − 92 ⋅ cosα 2 ) ⋅ = ⋅ 9D 9D 9D 9D (7.15) (7.16) (7.17) Si Va = V1 (expansión sólo en la tobera y sin pérdidas) 2⋅X 9 cosα1 − 2 ⋅ cosα 2 91 91 η= (7.18) Como V2·cosα2 = 2·u-V1·cosα1, la ecuación resultante para el rendimiento es una parábola, de la cual se puede obtener el máximo. ηN = 4 ⋅ X X ⋅ cosα1 − 91 91 (7.19) ηk 0 (cos α1)/2 cos α1 u/v1 Por tanto, el triángulo de velocidades con el máximo rendimiento se da si: X cosα1 2⋅X = → cosα1 = 2 91 91 © Los autores, 2002; © Edicions UPC, 2002. (7.20) 7 Instalación de turbinas de vapor 377 V2 será mínimo cuando sea perpendicular a u, cumpliendo así la ecuación anterior. v2 α2 u w1=w2 v1 u α1 Fig.7.20 Triángulo de velocidades modificado para máximo rendimiento Pérdidas en la turbina a) Por rozamiento del vapor en las paredes del álabe y la tobera: - Turbulencias - Fugas de vapor - Choque en borde de entrada al álabe Tanto en los álabes como en las toberas se usan unos coeficientes experimentales para tener en cuenta las pérdidas. Toberas: ϕ<1 : coeficiente de velocidad situado en el rango 0.93÷0.97. Usando las unidades de la misma forma que en la ecuación 7.13 queda: 91 = ϕ ⋅ 9D = ϕ ⋅ . ⋅ ∆K (7.21) Álabes: Para los álabes se pueden usar curvas experimentales, en función de la geometría del álabe y de sus ángulos de entrada y salida. Ψ<1 : 2 = Ψ⋅ : 1 © Los autores, 2002; © Edicions UPC, 2002. (7.22) 378 Máquinas térmicas motoras ψ Acción Reacción Φ = 180−(β1+β2) b) Pérdidas correspondientes a la energía cinética del vapor que aún tiene a la salida del rodete. c) Pérdidas por rozamiento al girar el rodete en los álabes vacíos en turbinas de admisión parcial. d) Pérdidas por conducción y radiación térmicas, no adiabáticas. e) Pérdidas mecánicas: rozamientos cojinetes, mecanismos, regulación...etc. -Rendimientos: ∆ha: Salto entálpico adiabático ∆KN → ∆KN = ∆KD − ( $ + %) ∆KD ∆K = → ∆K = ∆KD − ( $ + % + & + ') ∆K ∆KH = → ∆KH = ∆KD − ( $ + % + & + ' + ( ) ∆KD η SHULIpULFR = ηint L HUQR L D ηHIHFWLYR ηPHFiQLFR = ∆KH ∆KD − ( $ + % + & + ' + ( ) ηHIHFWLYR = = ηint HUQR ∆KL ∆KD − ( $ + % + & + ' ) Teórico η, = W 7 ∆K K D L térmico Indicado ηW , , = ∆KL = ηint HUQR ⋅ η W ,7 KL © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 379 hi: entalpía inicial η7RWDO = ∆KH = ηW , 7 ⋅ ηint HUQR ⋅ ηPHFiQLFR KL (7.23) La tobera y álabes fijos La principal función de la tobera, a parte de conformar el estator (la corona fija de los álabes) es de expansionar el vapor. Por lo tanto, se consigue una E cinética (velocidad) a partir de una energía de presión del vapor. La hipótesis que tomaremos para el balance energético del sistema abierto es: - No hay transferencia de calor - Flujo estacionario - Proceso adiabático de expansión - Unidimensional A 1 A S Fig.7.21 Sección tobera 9VW 2(K1-KV) V velocidad media en A v = 1/ρ ( volumen específico del vapor) VA· SA = G· vA G = SA· VA·ρA La forma de la tobera da variación de la sección, y suponiendo gas ideal y que el flujo es constante se tiene: Vi (velocidad de la sección i) = 2 ⋅ (K1 − KL) © Los autores, 2002; © Edicions UPC, 2002. (7.24) © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 381 Aparte de la sección, la tobera, el estátor de la máquina tiene más álabes fijos que direccionan el flujo hacia los álabes móviles. Al derivar Φ( 3L ) igualamos a cero, así encontraremos la Pm ( P es constante en la sección máxima). 31 Se encuentra así la siguiente expresión 3P 2 γ = 31 γ + 1 γ + 1 Esta P máxima hace máxima la función Φ ( (7.29) 3L ) y por tanto máxima Sm. 31 Si Pm>Ps; Ps ( presión de salida de la tobera), se tiene tobera cónica convergente divergente (Fig. 7.22). Ps P1 m 1 s Fig.7.22 Tobera convergente-divergente Si Pm < Ps la parte divergente no actúa y la tobera queda limitada a la zona convergente (Fig 7.23). P1 Pm<Ps s 1 Fig.7.23 Tobera convergente © Los autores, 2002; © Edicions UPC, 2002. 382 Máquinas térmicas motoras 7.3.4 Materiales En los álabes los materiales más utilizados son los aceros inoxidables de diferentes tipos. Estos aceros, además de su contenido en carbono, tienen muchas veces una fuerte cantidad de níquel en su composición que, como el titanio, evita la corrosión, y aditivos diversos como el cobalto, el molibdeno, que aumentan la resistencia a altas temperaturas. Para evitar la erosión en zonas de vapor húmedo los álabes de la parte posterior de la turbina se recubren con aleaciones especiales. Los discos y los rotores se fabrican de aceros, más sencillos o resistentes según la potencia y la temperatura a que trabaja la turbina. Para temperaturas muy elevadas se recurre a aceros austeníticos. Para los ejes se usan aceros al carbono martensíticos, auque se puede recurrir a aceros aleados si los esfuerzos mecánicos y térmicos llegan a ser excesivos. Para el cuerpo de la turbina se emplea generalmente la fundición de hierro, y a veces se recurre a la construcción soldada con chapa de acero, aunque no deben emplearse con temperaturas de trabajo superiores a los 250ºC. Actualmente existen fundiciones especiales que experimentan una expansión mucho más moderada a temperaturas elevadas. Para temperaturas superiores a los 560ºC, deben emplearse aceros austeníticos. 7.4 Calderas 7.4.1 Descripción El empleo del agua en las turbinas de vapor, como ya se ha dicho, es debido a su abundancia, su fácil manejo, el reducido coste, y sus buenas propiedades, de las que destacan: - Alto calor específico - Alto calor latente en el rango normal de temperaturas de utilización, lo que significa utilizar menores cantidades de agua para transportar la misma cantidad de energía. - Conductividad térmica relativamente alta - Viscosidad relativamente baja - Temperatura crítica razonablemente alta, permitiendo su empleo en ciclos térmicos con bajas exigencias relativas de energía para la compresión o el bombeo. El vapor tiene características similares al gas (varía notablemente su volumen específico con la presión, además de expandirse o difundirse indefinidamente con las únicas limitaciones de las fuerzas gravitatorias (peso) o de las paredes del recipiente que les contiene) cuanto más seco y sobrecalentado es, aunque normalmente está en una situación muy cercana a la coexistencia de líquido y gas, es decir, cerca de la condensación. Por eso se dice que un vapor es tanto más gas cuanto más sobrecalentado se encuentra. El agua que se puede obtener en ríos, pozos y lagos no puede utilizarse directamente, por contener sustancias disueltas y contener disuelto aire, por lo que deberá ser tratada previamente a su utilización. La caracterización de la calidad del agua se obtiene a partir de la definición de su dureza, que hará referencia a la cantidad total de calcio y magnesio que contiene disuelta. © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 383 Cada caldera tiene un tratamiento idóneo, que es consecuencia de las exigencias de calidad del agua en la caldera, entre otros. El agua de alimentación de la caldera se compone del condensado (vapor convertido en agua después de haber pasado por la turbina), y se complementa con el agua de reposición (agua ablandada) para compensar pérdidas. En centrales termoeléctricas el agua en bruto (directa) representa tan sólo el 0,5% del agua total que entra en la caldera, mientras que en casos en que se utilizan turbinas a contrapresión, ésta representa el 100%, ya que se utiliza para otros procesos el vapor descargado por la turbina. La tendencia a la corrosión de la caldera causada por el agua de alimentación está determinada por dos factores: - La acidez (pH), que fijará la velocidad de ataque de las paredes. - El contenido de oxígeno, que fija el alcance de este ataque, por lo que será necesario desgasificar el agua de alimentación antes de que entre a la caldera. La purga es un flujo de agua expulsado de la caldera para mantener un contenido de sales determinado dentro de ella, para evitar una concentración excesiva de los sólidos disueltos por la explotación, así como para dar salida a los sólidos que pudiera haber en suspensión. La purga provoca pérdidas de calor, incluso cuando se aprovecha el calor del agua evacuada. Además existen una serie de equipos auxiliares encargados de proporcionar el agua de alimentación, los combustibles y el aire de combustión en las cantidades y condiciones adecuadas, aparte de extraer de las calderas los gases producidos, las purgas y otros. 1. Equipos del carbón y combustible sólido El carbón puede quemarse según dos técnicas: triturado o pulverizado. Cada una de ellas requiere una preparación del combustible y unos equipos específicos para la alimentación del carbón al hogar de la caldera.En el caso de quemar carbón triturado, la combustión deberá realizarse en las parrillas, y el carbón deberá ser triturado previamente Si se utiliza carbón pulverizado, los quemadores introducen el carbón y el aire de combustión de forma que se produzca una llama estable y a distancia del quemador. Su buen funcionamiento requiere una mezcla rápida y eficiente del combustible y del aire, y que los gases sean dirigidos a una velocidad apropiada para que el volumen total del hogar sea útil y no existan zonas muertas. 2. Accesorios de combustibles líquidos El quemador es el encargado de introducir el combustible dentro de la caldera y debe cumplir unos requisitos mínimos, como son: - Convertir el líquido en gas o vapor. - Provocar una buena mezcla entre vapor y aire. - Elevar la temperatura de la mezcla por encima de la temperatura de ignición. © Los autores, 2002; © Edicions UPC, 2002. 384 Máquinas térmicas motoras - Asegurar la continuidad de la alimentación de aire y combustible. - Posibilitar la evacuación de los productos de la combustión fuera del hogar. - Ser regulable para poder atender diversos valores de carga. 3. Combustibles gaseosos Se queman y regulan con mayor facilidad, por lo general, ya que no existen problemas de pulverización para la posterior gasificación, como en los combustibles sólidos o líquidos. Los gases son generalmente limpios y, por consiguiente, no forman atascos ni ensucian las cámaras de combustión. 4. Tiro Al quemar un combustible en el hogar de una caldera éste se llena de productos de la combustión. Entonces es necesario eliminar esta atmósfera y hacer penetrar aire nuevo que permita que la combustión prosiga. El gas, a elevada temperatura, tiende a ascender y el lugar que va dejando tras de sí en el hogar es ocupado por el aire que penetra por el mismo, estableciéndose una corriente que recibe el nombre de tiro. Esta corriente puede ser natural o bien artificial, con la ayuda de un ventilador. Los ventiladores pueden usarse como aspiradores, para extraer los gases del hogar (tiro inducido) o como impulsores de aire, produciendo sobrepresión (tiro forzado). 5. Equipos de depuración de gases La pureza del humo expulsado de la caldera a través de la chimenea debe cumplir, como mínimo, con la reglamentación, con tal de respetar al máximo el medio ambiente. En concreto deben eliminarse del humo las partículas sólidas que lleva en suspensión tales como trocitos de carbón, cenizas y hollín, por lo que se hace el gas por los depuradores de humos, como pueden ser: - El lavador de gas, que obliga al humo a desviarse en ángulo recto y a ponerse en contacto con el agua, para privarlo de sustancias sólidas. - Ciclón, en el cual el humo adquiere un movimiento centrífugo, que consigue arrebatar al gas un porcentaje muy elevado de partículas sólidas. - Precipitador electrostático, que alcanza rendimientos en torno al 99%, y donde el gas atraviesa un campo electrostático, que produce que las partículas en suspensión, cargadas eléctricamente, sean desviadas de su trayectoria por el efecto del campo. Este tipo de precipitador consume mucha menos energía que los separadores ciclónicos, aunque son de un coste más elevado. 7.4.2 Tipologías de calderas La caldera se define como un generador de vapor de fuego directo. El combustible utilizado puede ser líquido, gaseoso o sólido. La combustión tiene lugar fuera de la región de ebullición del agua, concretamente en el fogón o cámara de fuego. Para mantener la combustión es necesario suministrar cierta cantidad de aire y remover los © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 385 productos resultantes de la combustión mediante el tiro. La capacidad de producción de calor depende de: - El grado de combustión del combustible - La extensión de la superficie de calefacción - Las áreas de calefacción primarias (calor transmitido por radiación) y las áreas secundarias (por convección) - La circulación de agua y vapor - La circulación de los gases de combustión. El funcionamiento de las calderas se basa en calentar el agua de un circuito hasta el punto de ebullición, de modo que el vapor se acumula en la parte más alta del circuito de fluido de la caldera, por tener densidad menor a la del agua. La caldera se alimenta de modo que el nivel de agua se mantiene más o menos constante. Las calderas más frecuentes para la TV son las de acero, las de lecho fluidizado y los reactores nucleares. 1. Calderas de acero. Tipo pirotubular Éste es el primer tipo de caldera de acero, y está formada por tubos rectos que contienen los gases de la combustión, y que calientan el agua que rodea los tubos. El fogón de la caldera puede ser externo o interno. Salida de vapor Tubos de gas Hogar Agua de alimentación Purga de lodos Fig. 7.24 Caldera pirotubular. Sección longitudinal y transversal © Los autores, 2002; © Edicions UPC, 2002. 386 Máquinas térmicas motoras Dentro de las calderas de fogón interno podemos distinguir entre: - Calderas horizontales tubulares escocés - Calderas verticales tubulares - Calderas de tipo residencial Las más usadas en la industria son las horizontales tubulares, con tamaños de hasta 6800 Kg de vapor a la hora. Algunas características son: - Poseen un gran volumen de almacenamiento de agua, que compensa los efectos de las fluctuaciones de la demanda de vapor. - Bajo coste si las comparamos con las acuotubulares. - Necesitan más tiempo para alcanzar su presión y temperatura de trabajo que las acuotubulares. 2. Calderas de acero. Tipo acuotubular Como su nombre indica, están formadas por tubos y colectores que contienen el agua, bien sea en estado líquido o vapor, durante su paso por la caldera. Los domos, que están interconectados por los tubos, tienen la misión de almacenar agua y vapor. Normalmente hay dos, tres o cuatro colectores, y generalmente uno de ellos se encuentra a menor altura que los otros, y contiene una válvula de purga para evacuar. Los superiores son colectores de agua y vapor, y en su interior llevan separadores de vapor, para eliminar el arrastre de la humedad, y un precipitador, purificando así el vapor. Los tubos son la única superficie de calefacción. Este tipo de calderas puede tener la disposición de los tubos rectos o en forma curvada, presentando esta última disposición mejores características de presión y temperatura, con lo que ha desplazado a las de tubos rectos. Colector de vapor Vapor Circuito de agua Colector Fig.7.25 Caldera acuotubular © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 387 Algunos accesorios de la caldera acuotubular son: - El economizador, que aprovecha los gases finales para calentar el agua de alimentación de la caldera antes de que se mezcle con la que circula por el interior de la caldera. - Calentador de aire, antes de que éste participe en la combustión. - Sobrecalentador, que aumenta la temperatura del vapor que proviene de la caldera, antes de que éste entre en la turbina. - Recalentador, que también aumenta la temperatura del vapor, pero éste procede ahora de una primera expansión en la turbina. 3. Calderas de lecho fluidizado La fluidización es una operación en la que un sólido se pone en contacto con un líquido o un gas (el caso más usual), adquiriendo el conjunto unas características similares a las de los fluidos. El lecho está constituido por una capa de material sólido en partículas (carbón pulverizado), soportada inicialmente por una placa porosa, a través de la cual se inyecta el gas en sentido ascendente. Al pasar a través del sólido, el aire de alimentación experimenta una pérdida de presión, pero fluye en régimen turbulento y alta velocidad a la salida del soporte poroso. El aire en estas condiciones dispone de suficiente energía como para arrastrar las partículas de combustible sólido hasta una cierta altura. Dado que en el recinto ya existe combustión de partículas anteriores, las que se van aportando se queman, incluyendo gran variedad de calidades de combustible sólido, suspendido en la corriente turbulenta y ascendente del aire de combustión, que asciende desde abajo del lecho y generalmente está mezclado con caliza para absorber el azufre. Se pueden diferenciar distintos estados de operación básicos: - Lecho fijo o empaquetado. El aire atraviesa el lecho a baja velocidad, con lo que la fuerza que produce éste es menor que el peso de las partículas, y el fluido pasa por los espacios entre partículas. - Lecho incipientemente fluidizado. El fluido pasa a una velocidad mayor, produciendo una fuerza que se iguala aproximadamente con el peso de las partículas. Llegados a este punto el lecho se expande al tiempo que se inicia el arrastre de partículas, sobretodo las más finas. - Lecho fluidizado circulante. La velocidad del fluido es aún mayor, y se produce el arrastre del lecho. Pueden ocurrir dos cosas, la primera es que el lecho consiga el equilibrio al verse aumentada la distancia entre partículas (lecho homogéneamente fluidizado), y la otra es que se origine una burbuja en el seno del lecho, sin que varíe la distancia entre partículas (lecho heterogéneamente fluidizado o burbujeante). - Transporte neumático, se produce al seguir aumentando la velocidad del fluido, y en este caso el lecho fluidizado propiamente dicho ya no existe, porque se arrastran todas las partículas. En los dos últimos casos hace falta un ciclón para la recuperación de partículas. En el ciclón, estructura de grandes dimensiones, el fluido se hace recircular. El ciclón tiene que estar revestido de un material refractario para soportar las altas temperaturas. © Los autores, 2002; © Edicions UPC, 2002. 388 Máquinas térmicas motoras Fijo Incipiente Homogéneo a a a Burbujeante Transporte neumático a a Fig.7.27 Tipos de estado del lecho, a: zona en la que las partículas están en combustión Las características del lecho fluidizado en operaciones industriales son las siguientes: - Permite operaciones de control con sencillez. - Se pueden generar cantidades próximas a las 100 toneladas por hora de vapor. - Permite eliminar el SO2 de los gases de combustión. - La mezcla rápida de sólidos conlleva unas condiciones cercanas a tener una temperatura constante en todo el reactor. Ello permite un control sencillo y seguro. - Hace posible evacuar las grandes cantidades de calor producidas. - Es posible utilizarlo para operaciones de gran escala. - La transferencia de calor y de masa entre el gas y las partículas es grande. - Alguna desventaja sería la erosión de las tuberías y depósitos por abrasión de partículas, que puede ser seria. - Instalación generalmente capaz de aceptar combustibles de baja calidad, aunque está diseñado normalmente para un tipo de combustible específico. - La combustión en el lecho tiene un campo limitado de operación, dentro del cual el lecho está en equilibrio, por lo que en general está diseñado para cargas constantes © Los autores, 2002; © Edicions UPC, 2002. 7 Instalación de turbinas de vapor 389 7.4.3 Combustibles para calderas de vapor Pueden emplearse combustibles sólidos, líquidos y gaseosos. El empleo de uno u otro depende de la disponibilidad en el país dónde se halla instalada la caldera. La combustión sólida se realiza a partir del carbón, generalmente pulverizado. El carbón más usado es la hulla, con un contenido de carbono alrededor del 85%. Como líquidos, se usan los derivados del petróleo y muy especialmente los fuel-oils. También es posible aprovechar los productos negros resultantes de la destilación del petróleo, que aun siendo de difícil manejo y elevada viscosidad poseen un poder calorífico alto. Combustibles gaseosos empleados son el gas natural, el gas del carbón, propano,...El gas natural es el de un uso más fácil y limpio, por lo que es totalmente recomendable su utilización si se poseen cantidades suficientes. La gasificación del carbón permite una combustión con gases más limpios que el carbón en sí, ya que suele eliminarse la mayor parte del azufre. El gas propano es de uso más limitado, puesto que resulta más caro. Sobre la combustión, es esencialmente lo mismo que para las turbinas de gas. 7.5 Condensador y bomba de presión Es un órgano fundamental en una instalación con TV. Está constituido por un recinto cerrado de baja presión (35 a 50 mbar) donde se descarga el vapor que sale de la turbina. La baja presión permite incrementar el gradiente de presión y con ello la potencia de la máquina. La baja presión también es debida a la condensación del vapor, que reduce casi 30000 veces el volumen específico del vapor en condiciones de saturación. La mayor parte son del tipo de superficie, es decir, intercambiadores de calor con fluidos, uno caliente (el vapor) y otro frío, el agua, proveniente de un río o lago cercano, e incluso del mar, o de una torre de enfriamiento por donde se hace pasar el agua en ciclo cerrado con el condensador. Generalmente el agua fría se hace circular por el interior de los tubos del intercambiador, mientras que el vapor descargado por la turbina se hace pasar por entre la carcasa y los tubos. Conviene extraer el aire y los gases no condensables que acompañan al vapor, por medio de bombas de vacío. Estos gases y aire pueden tener su origen en el agua, o entrar por purgadores o juntas de la turbina. En éstos condensadores los fluidos circulan de manera independiente, y así es posible operar con agua tratada en todo el circuito del motor, para evitar depósitos. Otros tipos de condensadores, como el de chorro, donde el vapor descargado se mezcla con el agua de enfriamiento, son mucho menos usados. La falta de agua en una caldera provoca averías muy graves, y es por ello que cada caldera está dotada de dos sistemas de alimentación de agua, a ser posible accionados por fuentes de energía diferentes. La mayoría de las veces son bombas centrífugas. El hecho de que trabajen con agua caliente impone unas exigencias muy estrictas para evitar la cavitación. © Los autores, 2002; © Edicions UPC, 2002. 390 Máquinas térmicas motoras © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 391 8 Motor Stirling 8.1 Introducción Se define máquina Stirling como aquel dispositivo que convierte calor en trabajo, o viceversa, a través de un ciclo termodinámico regenerativo, con compresión y expansión cíclicas del fluido de trabajo, operando dicho fluido entre dos temperaturas, la del foco caliente y la del foco frío. Cuando la máquina opera de modo volumétrico recibe propiamente el nombre de máquina Stirling, mientras que si opera mediante flujo permanente continuo se denomina máquina Ericsson. La nomenclatura aquí expuesta es fruto de una evolución histórica; el primer nombre que recibieron estas máquinas fue el de motores de aire caliente (hot-air engines) porque sólo usaban aire como fluido de trabajo. Posteriormente, el uso de otros gases provocó que se buscaran otros nombres, como motores de gas caliente (hot-gas engines), o bien, motores Stirling , en honor a Robert Stirling. Esta última fue la que se impuso, de tal manera que incluso se ha empleado erróneamente para denominar algunas máquinas de tipo Ericsson. No debe confundirse la máquina Stirling con el ciclo termodinámico Stirling o la máquina Ericsson con el ciclo del mismo nombre. De hecho, la imposibilidad técnica de realizar los procesos teóricos puros motiva que muy pocas máquinas Stirling se acerquen a este ciclo ideal (véase subapartados 8.3.2 y 8.3.4). Debe señalarse también que en gran cantidad de bibliografía se habla de motores Einrici, Robinson, RankineNapier..., pero no son más que diversas versiones de motores Stirling. La primera experiencia conocida de los motores Stirling se remonta al 1699, con un rudimentario artefacto que aprovechaba la expansión de aire caliente para hacer girar un volante, realizada por Amontons, en Francia, sólo un año después de que Savery fabricase la primera máquina de vapor para bombear agua. De hecho, el desarrollo de los mototres Stirling ha transcurrido siempre paralelo al de la máquina de vapor. En 1759 Wood modificó para aire caliente la máquina de vapor de Newcomen. Glazebrook, el 1801 introdujo el ciclo cerrado, y ya en el 1816 los hermanos Robert y James Stirling dieron un gran impulso al ciclo cerrado regenerativo. Muchas más aportaciones a lo largo de todo el siglo XIX (Ericsson, Cayley...) afinaron los conocimientos teóricos sobre el tema, e inventaron nuevos mecanismos para los motores Stirling. Durante la época de esplendor de las máquinas de vapor, las cuales constituían la fuerza motriz de la mayoría de las industrias © Los autores, 2002; © Edicions UPC, 2002. 392 Máquinas térmicas motoras del siglo XIX, centenares de motores Stirling se utilizaban para el bombeo de agua y otras aplicaciones de menor potencia (0.1¸4 kW) como ventiladores. Se consideraban seguros y silenciosos para estas aplicaciones, pero habían tenido más de un fracaso en las configuraciones de mayor potencia. Hasta 1940 se fabricaban en grandes cantidades. El gran desarrollo de los motores de combustión interna a partir de la mitad del siglo XIX y la mejora experimentada en el refinamiento de los derivados del petróleo (gasolinas, gasóleos) colocó los motores alternativos al frente de los motores térmicos. Este hecho, acompañado de la invención de los motores eléctricos, consiguió que, desde principios del siglo XX, la máquina de vapor y los motores Stirling y Ericsson fueran apartados en la carrera por la industrialización. Desbancado definitivamente el motor Stirling en aplicaciones motrices y de bombeo, hacia mediados de siglo XX aparece un renovado interés de estos dispositivos para nuevas aplicaciones. Refrigeración, calefacción y generación eléctrica a partir de fuentes de calor alternativas a los combustibles fósiles de alta calidad son nuevos campos donde los Stirling pueden ser competitivos respecto a otros sistemas. Multitud de empresas, particulares y departamentos universitarios están desarrollando programas de cara al diseño y experimentación de máquinas Stirling suficientemente eficientes para competir con las soluciones actuales. Existen diversos prototipos realizados, pero todavía son pocas las aplicaciones comerciales que se puedan encontrar. 8.2 Funcionamiento del motor Stirling El motor Stirling opera con un fluido motor en un ciclo cerrado, obteniendo trabajo a partir de cuatro procesos cíclicos consecutivos: aporte de calor, expansión con el aporte de calor de la fuente de calor, extracción de calor hacia un acumulador térmico regenerativo y compresión con extracción de calor hacia el foco frio. El esquema conceptual de un motor Stirling es el mostrado en la figura 8.1, donde el fluido está confinado dentro de un cilindro entre dos pistones opuestos. En medio, dividiendo el espacio, se dispone el regenerador, que atravesado por el fluido lo condiciona para adecuarlo a la temperatura de la cámara en la que se encuentra. A un lado se dispone la cámara de compresión, a temperatura baja, y en el otro la cámara de expansión, a temperatura alta. 5HJHQHUDGRU 7PtQ 7Pi[ &iPDUD &iPDUD GHFRPSUHVLyQGHH[SDQVLyQ Fig.8.1 Esquema ideal de una máquina Stirling isotérmica © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 393 Vmàx F Vint F Vmín F Vmín C Vint C Vmàx C 1 2 3 4 1 Regenerador Fig.8.2 Evolución de los volúmenes de las cámaras a los diferentes puntos del ciclo. VmaxF: volumen máximo de la cámara fría. VintF: volumen intermedio de la cámara fría. VminF: volumen mínimo de la cámara fría. VminC: volumen mínimo de la cámara caliente. VintC: volumen intermedio de la cámara caliente. VmaxC: volumen máximo de la cámara caliente. El proceso al que se somete el fluido descrito en la figura 8.2 consta de cuatro pasos: 1. La totalidad del fluido se encuentra a baja temperatura en la cámara fría, por lo que el volumen de esta cámara es máximo, mientras que la cámara caliente está a volumen mínimo. Evolución 1-2. Se produce un proceso de compresión isotérmica en la cámara fría, por consiguiente debe extraerse calor. 2. El fluido sigue en la cámara fría, el volumen es mínimo para el fluido, pero intermedio para el mecanismo. La cámara caliente continúa a volumen mínimo. Evolución 2-3. Se produce el trasvase del fluido de la cámara fría a la caliente de forma isocórica. El fluido atraviesa el regenerador, que le aporta calor para alcanzar temperatura alta, entrando, de este modo, en la cámara caliente a su propia temperatura. © Los autores, 2002; © Edicions UPC, 2002. 394 Máquinas térmicas motoras 3. Todo el volumen está en la cámara caliente con volumen mínimo para el fluido, siendo el volumen del mecanismo volumen intermedio para la cámara caliente, mientras que la fría ha pasado a tener volumen mínimo, es decir, nulo. Evolución 3-4. Expansión isotérmica en la cámara caliente, por consiguiente debe aportarse calor. 4. La cámara caliente y el fluido están a volumen máximo, y mientras que la cámara fría sigue a volumen mínimo. Evolución 4-1. Se produce el trasvase de fluido de la cámara caliente a la fría de forma isocórica. El fluido atraviesa el regenerador y lo calienta, acumulándose el calor que volverá a recibir el fluido nuevamente en la evolución 2-3. Esta evolución de los procesos se resume en la figura 8.3, donde se evidencia dónde se encuentra el fluido de trabajo en las distintas cámaras del mecanismo. De este modo existen simetrías en la localización y evolución del fluido, que comporta que el fluido deba encontrarse totalmente confinado en la cámara caliente en la expansión y en la fría en la compresión isoterma, mientras que en los trasvases isocóricos evoluciona de uns cámara a otra absorbiendo o cediendo calor al regenerador. La dificultad de realización del ciclo teórico se produce por los requerimientos de desplazamiento de los pistones ya que, como se observa en la figura 8.4, la evolución 4-1 y 3-4 en la cámara caliente y fría, respectivamente, no tiene tiempo de realizarse para poder mantener el sincronismo de posición entre ambas cámaras. Esta problemática motiva que la realización práctica de este tipo de motores obligue a renunciar a la correcta realización de alguna de las formas del ciclo para adaptarse al mecanismo. Una posible implementación del motor que se esquematiza en la figura 8.3 puede ser mediante el conocido mecanismo biela-manivela que caracteriza los motores alternativos. El pistón y el mecanismo desplazador accionador mencionado someten al fluido a un ciclo que, como se analizará con posterioridad, comporta el solapamiento del tramo 4-1 con la propia regeneración 3-4 y la compresión 1-2. 'HVSOD]DGRU 9 5HJHQHUDGRU 9 3LVWyQ ,,,,,,,9 Fig. 8.3 Esquema del ciclo de un motor Stirling © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 395 La evolución del mecanismo y la realización del ciclo tal y como puede observarse en la figura 8.3 se resume de la siguiente manera: I. El pistón se encuentra en el punto muerto inferior, y el desplazador, en el superior, por lo tanto todo el fluido está en la cámara fría. II. El desplazador se queda en el punto muerto superior y el pistón comprime el fluido a temperatura baja, tiene el volumen mínimo. III. El pistón se mantiene en ese punto y el desplazador deja entrar al fluido en la cámara caliente avanzando carrera hacia su punto muerto inferior. Este traspaso se realiza por el regenerador. El fluido sigue teniendo volumen mínimo. IV. El fluido se calienta al paso por el regenerador y por consiguiente imprime una presión sobre el desplazador que motiva la carrera motriz y llega a su punto muerto inferior junto con el pistón. Seguidamente el desplazador se desplaza hacia su punto muerto superior haciendo pasar al fluido, ya expansionado, hasta la cámara fría a través del regenerador. Cuando el desplazador llega a su punto muerto superior, volvemos a tener la estructura de la posición I. C 4 Vmàx 3 Vint Vmin 4 3 2 1-2 F 1 Vmàx Vint Vmin 1 2 2 3-4 3-4 Fig.8.4 Evolución de los volúmenes de las cámaras caliente y fría durante la realización del ciclo 8.3 Ciclos termodinámicos ideales La modelización del ciclo termodinámico del motor Stirling siempre parte de la base de que las evoluciones asociadas a la variación de volumen se realizan de modo isotérmico, de modo que durante la expansión se produce la introducción de calor del ciclo y durante la compresión se produce la extracción. © Los autores, 2002; © Edicions UPC, 2002. 396 Máquinas térmicas motoras Este hecho comporta que el fluido motor, una vez se ha expansionado, permanece a la misma temperatura que antes de la expansión, lo que permite la introducción del concepto de regenerador. Al operar el fluido entre dos focos a distinas temperaturas, uno caliente y una frío, se cumple que el calor asociado a su enfriamiento es el mismo que el asociado a su calentamiento, lo que permite introducir un elemento que almacene el calor cuando una vez expansionado el fluido debe operar a temperatura baja, para después de la compresión volver a absorber dicho calor para pasar a la cámara caliente donde se expansionará. Los distintos modelos termodinámicos del ciclo mantienen las evoluciones isotérmicas, pero modelizan de distinto modo la inclusión del regenerador. De este modo, existen dos caminos extremos, el ciclo conocido como Stirling, en el que la evolución a través del regenerador se produce a Vcte, y el Ericsson, donde esta se produce a Pcte. De ambos nace el ciclo de Rallis, como una composición de ambos, en la que dicha evolución se realiza en parte a Vcte. y en parte a Pcte. Para facilitar el análisis y estudio de los ciclos se realiza inicialmente la modelización para el caso general, de Rallis, para posteriormente desarrollarse como casos particulares el Stirling y el Ericsson. Este último ciclo se expone, pero no se desarrolla con profundidad, porque se utiliza habitualmente para la modelización de las máquinas Ericsson, en las que el proceso es de flujo continuo, y para no acostrumbarse a asociar a motores de desplazamiento positivo. Finalmente, y como ciclo intermedio entre el ciclo de Rallis, en el que la regenereación se produce en etapas, se ofrece el ciclo mixto Stirling-Rallis en el que la transferencia de fluido al final de la compresión se produce como un ciclo Rallis y la del final de la expansión como un Stirling, ya que maximiza el trabajo a igualdad de limitación tecnológica por presión máxima del ciclo. Otro aspecto de especial interés en la modelización de los ciclos asociados a los motores Stirling reside en la inclusión de la problemática asociada a la realización de evoluciones puramente isotérmicas. Este hecho se produce porque la limitación de los mecanismos de transferencia de calor, asociados a la velocidad a la que se pretende realizar el ciclo, provocan que difícilmente se pueda introducir o extraer calor con suficiente rapidez, lo que conlleva, en la mayoría de realizaciones, y cuando mayor es la relación volumen/superficie de las cámaras, que las evoluciones tenderán a ser indeseadamente adiabáticas. Por este motivo, el análisis de los ciclos establecidos tiene un margen de modelización, en el que en un extremo se encontrarán las evoluciones isotérmicas suponiendo la existencia de procesos casi-estacionarios y en el otro las evoluciones adiabáticas, cuando las velocidades de realización del ciclo son suficientemente elevadas para que las citadas hipótesis no puedan considerarse. A estos efectos, se incluye un apartado previo de dicha problemática. 8.3.1 Importancia de la evolución isotérmica respecto a la adiabática Las evoluciones isotérmicas sólo pueden realizarse cuando la velocidad del motor es muy baja, en caso contrario estas transformaciones tienden a hacerse adiabáticas. Para poder valorar la influencia de esta desviación respecto la isoterma sobre el rendimiento y el trabajo, deben considerarse diversos casos. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 397 Para realizar una transformación desde un punto 1 (Fig. 8.5) hasta al punto 2, que se encuentra a igual temperatura, se pueden seguir diversos caminos. P 1 Isoter Adiabática(1pa ) Adiabática (4 ) T TH 1 2 2 T H TADIAB 1 V S Fig. 8.5 Posibles transformaciones para la expansión de 1 a 2 El calor aportado durante una expansión isoterma viene dado por la expresión siguiente: Q = TH R ln (Vf/Vi) (8.1) El calor equivalente en una expansión adiabática realizada según un paso se tiene que calcular en base a la temperatura al final de la transformación adiabática, pues el calor equivalentecorresponderá al restablecimiento de la temperatura de la fuente a volumen constante. Tadiab1 = TH (Vi/Vf)k-1 (8.2) Qadiab1 = n cv (TH- Tadiab1) (8.3) Para el caso de transformación adiabática con más pasos, las expresiones son las anteriores pero aplicadas a intervalos de volumen menores. Como se desprende de la figura 8.6, el calor aportado isotérmicamente es máximo, al mismo tiempo que cuantos más pasos adiabáticos se usen, más próximo se está de la transformación isoterma. Por lo tanto, el caso en que se aporta menos calor a un hipotético motor térmico es el que opera con una transformación teórica adiabática en un solo paso en el proceso de expansión frente a otro que la realiza isotérmicamente. Calculando para una situación concreta de motor con transformaciones según diversos pasos se puede tener una idea aproximada de la influencia del factor de la adiabaticidad sobre el trabajo final obtenible. © Los autores, 2002; © Edicions UPC, 2002. 398 Máquinas térmicas motoras P &È0$5$&$/,(17( 3 4 2 1 &È0$5$)5Ë$ V Fig. 8.6 Evolución del ciclo de las cámaras caliente y fría Cálculo numérico de varias transformaciones: Se supone el caso de un motor de 100 cm3, de helio, con un volumen mínimo de 100 cm3 y un volumen máximo de 200 cm3. El calor aportado según el número de etapas adiabáticas se resume según la tabla 8.1. Tabla 8.1 Calor aportado en función del tipo de transformación 7LSRVGHWUDQVIRUPDFLyQ &DORU - HWDSDDGLDEiWLFD - HWDSDVDGLDEiWLFDV - HWDSDVDGLDEiWLFDV - HWDSDVDGLDEiWLFDV - HWDSDVDGLDEiWLFDV - ,VRWpUPLFDPHQWH - Según los resultados, un comportamiento totalmente adiabático implica una pérdida de calor importante. Pero se puede considerar que durante la transformación adiabática la temperatura no se aleja excesivamente de la temperatura máxima. Este comportamiento se podría asimilar a diversas transformaciones adiabáticas seguidas del mismo número de aportaciones de calor a volumen constante. En este caso, con pocas etapas el calor perdido se reduce ya de forma importante. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 399 Por lo tanto, se considera que para valorar la potencia del motor, el trabajo adiabático es un buen dato de referencia, pero sólo para marcar un límite, porque el comportamiento será mucho más próximo al trabajo desarrollado según una isoterma. 8.3.2 Ciclo de Rallis El funcionamiento como motor es el siguiente: Compresión isotérmica (1-2): Encontrándose el pistón de expansión en contacto con el regenerador, todo el fluido es comprimido (isotérmicamente a Tbaja ) en la cámara de compresión, cediendo calor Q a través de la pared del cilindro. Proceso regenerativo (2-2'-3): El fluido comprimido es transferido de la cámara de compresión a la de expansión a través del regenerador, gracias al movimiento simultáneo de los dos pistones. El proceso puede ser a volumen constante, a presión constante o una combinación de cada. El fluido pasa de Tbaja a Talta gracias a la aportación calorífica Qreg proporcionada por el regenerador. Expansión isotérmica (3-4): Encontrándose el pistón de compresión en contacto con el regenerador, todo el fluido es expandido (isotérmicamente a Talta) en la cámara de expansión, recibiendo calor Q a través de la pared del cilindro. Proceso regenerativo (4-4'-1): El fluido expandido es transferido de la cámara de expansión a la de compresión a través del regenerador, gracias al movimiento simultáneo de los dos pistones. El proceso puede ser a volumen constante, presión constante o una combinación de cada. El fluido pasa de Talta a Tbaja cediendo calor Qreg al regenerador. Q > Q Qreg ≥ Qreg El regenerador actúa como un acumulador térmico, pero sin pérdida de carga fluodinámica, que absorbe o cede calor al fluido según la atraviese en un sentido u otro, con el objetivo de pasarlo de Talta a Tbaja o viceversa. El ciclo isotérmico de Rallis se muestra en la figura 8.7 mediante el diagrama P-V, en el cual las áreas representan trabajo, y el diagrama T-S, en que se simboliza el calor. En la misma figura se observa el ciclo de Carnot entre las mismas temperaturas y volúmenes (misma cilindrada). El ciclo ideal de Carnot está formado por dos procesos isotérmicos y dos adiabáticos; su rendimiento máximo entre dos temperaturas dadas es siempre un punto de referencia y de comparación con otros ciclos. El diagrama P-V muestra como el ciclo isotérmico de Rallis proporciona un trabajo por ciclo mucho más grande que el de Carnot. De aquí se deduce que los motores reales asimilables al ciclo de Rallis (motores Stirling, por ejemplo) serán de dimensiones menores que para el ciclo de Rankine (modificación del de Carnot, como son la máquina y la turbina de vapor), para proporcionar potencias equivalentes. El rendimiento térmico de un ciclo entre dos temperaturas dadas es máximo cuando este ciclo sólo libera o recibe calor isotérmicamente de estas temperaturas. El ciclo de Carnot lo hace y por tanto tiene máximo © Los autores, 2002; © Edicions UPC, 2002. 400 Máquinas térmicas motoras rendimiento. Rallis, en general, no tiene esta propiedad y por esto tiene un rendimiento menor. Sólo en algún caso particular, como se verá, el ciclo isotérmico de Rallis consigue el rendimiento de Carnot. Fig. 8.7 Diagramas P-V y T-S del ciclo regenerativo isotérmico de Rallis.En líneas más finas se muestra el ciclo de Carnot entre las mismas temperaturas y volúmenes En la práctica, un regenerador no suele ser capaz de llevar el fluido a la temperatura deseada cuando éste pasa a través de él. Le hace falta aportación o sustracción extra de calor. Se habla de una efectividad del regenerador menor que 1, donde ε = Qreg (real) /Qreg (ideal) (8.4) Este parámetro puede incluirse en el cálculo de los rendimientos de los ciclos isotérmicos, y provoca una fuerte reducción de éstos en relaciones de compresión bajas (relación de compresión = Vmáx /Vmín). Cuando las relaciones de compresión son más grandes, el efecto no es tan notorio. : FLFOR ( 5DOOLV ) > : FLFOR ( &DUQRW ) η 5DOOLV ≤η &DUQRW =1− 7 7 mín máx (8.3) Este ciclo ideal queda afectado por la dificultad de evitar que las transformaciones isotermas no deriven hacia un comportamiento adiabático. Este fenómeno implica una disminución del calor aportado. Se considera que al final de toda expansión y compresión la temperatura del fluido es, efectivamente, la de la fuente, de forma que el calor aportado, o extraído, al realizar la transformación adiabáticamente corresponde al de una aportación, o extracción, de calor a volumen constante desde la temperatura del fluido al final de la transformación adiabática hasta la temperatura de la fuente. Esto afecta al trabajo y al rendimiento, que disminuyen. Sin embargo, si la expansión, o la compresión, se realizan de forma adiabática, pero sin alejarse excesivamente de la temperatura de la fuente (microexpansiones), la pérdida de trabajo y rendimiento es pequeña. Por lo tanto, en los análisis se ha tenido en cuenta este fenómeno, pero siempre se tiene que valorar desde el punto de vista de que el comportamiento termodinámico será más próximo para el de expansiones y compresiones según isotermas que según adiabáticas de un solo paso. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 401 a) Expresiones para el cálculo del ciclo Rallis El diagrama que se sigue es el de la figura 8.8. Las variables con las que se define el ciclo son las siguientes: i. Relación de compresión ii. Presión máxima del ciclo (bar) iii. Características del gas (Cp, Cv) (J/mol·K) iv. Cilindrada (cm3) v. Temperatura máxima (K) vi. Temperatura mínima (K) vii. Regeneración (%) El objetivo es determinar el rendimiento y el trabajo por ciclo. Fig. 8.8 Ciclo de Rallis Con la cilindrada y la relación de compresión quedarán definidos el volumen máximo y mínimo: Cilindrada V min = Relac ión de compresión – 1 Vmáx = Vmín + cilindrada © Los autores, 2002; © Edicions UPC, 2002. (8.5) (8.6) 402 Máquinas térmicas motoras Para determinar el número de moles se necesita determinar previamente la temperatura del punto 2. T2 = TC +regeneración (TH - TC) (8.7) Imponiendo la presión máxima teniendo fijado el volumen mínimo y conociendo la temperatura en estas condiciones se determina el número de moles: Pmax Vmin (8.8) n= R T2 Con estos datos ya se puede determinar las condiciones de temperatura, presión y volumen para cada punto del ciclo. Tabla 8.2 Expresiones para el cálculo de las condiciones en cada punto del ciclo 3XQWR 7HPSHUDWXUD 9ROXPHQ 3UHVLyQ 1 TC nRT1’/P1’ P4’ 2 2’ 3’ 4 4’ TC TC +regeneración (TH- TC) TH TH TH -regeneración (TH- TC) Vmín Vmín nRT3’/P3’ Vmáx Vmáx NRT2/V2 nRT2’/V2’ P2’ nRT4/V4 nRT4’/V4’ Con estos valores se puede obtener los calores transferidos en cada transformación. Compresión isoterma (1-2) Q1’2 = P1’·V1’·ln( V2 ) V1’ (8.9) Aportación de calor a volumen constante (2-2) Q22 = n · Cv · (T2 T2) (8.10) Aportación de calor a presión constante (2-3) Q23 = n · Cp · (T3 T2) (8.11) Expansión isoterma (3-4) Q3’4 = P3’·V3’·ln( V4 ) V3’ © Los autores, 2002; © Edicions UPC, 2002. (8.12) 8 Motor Stirling 403 Extracción de calor a volumen constante (4-4) Q44 = n · Cv · (T4 T4) (8.13) Extracción de calor a presión constante (4-1) Q41 = n · Cp · (T4 T1) (8.14) Para valorar la incidencia de un comportamiento adiabático y no isotérmico, debido a las limitaciones de velocidades asociadas a los procesos de transformación de calor, se ha calculado el trabajo que realizaría el fluido si se desplazara según una curva adiabática y no por una isoterma. Las expresiones utilizadas para el tramo 3-4 y 1-2 son las siguientes: Qadiab34 = n · Cv · (TH Tadiab34) (8.15) Qadiab12 = n · Cv · (Tadiab12 TC) (8.16) con Tadiab34 = TH · (V3 / V4)k-1 (8.17) Tadiab12 = TC · (V1 / V2)k-1 (8.18) k = Cp / Cv (8.19) donde El trabajo adiabático es inferior al isotérmico al trasladarse del punto 3 al 4, y superior al isotérmico al realizar el recorrido de 1 a 2. Por tanto, esta transformación adiabática afectaría al rendimiento y al trabajo, porque modifica tanto el calor aportado (3-4) como el extraído (1-2). El fluido tendería a comportarse entre las dos situaciones. b) Análisis del ciclo de Rallis En el ciclo Rallis (Fig. 8.9) se observa un rendimiento creciente en función de la relación compresión cuando se sigue un proceso por isotermas, pero cuando éstas se sustituyen por adiabáticas, aparece una rápida disminución del rendimiento a partir de relaciones de compresión de 2. El comprtamiento del trabajo en función de la relación de compresión (Fig. 8.10) presenta evoluciones semejantes ya sea en los ciclos con evoluciones isotérmicas como en los ciclos con evoluciones adiabáticas, aunque en las segundas se observa una disminución del trabajo obtenido mucho más importante al aumentar la relación de compresión. El trabajo isotérmico no depende de las características del fluido, porque el calor aportado en la expansión y extraído en la compresión tampoco depende de las características del fluido, la aportación de calor a volumen constante es idéntica a la extracción de calor a volumen constante y la aportación de calor a © Los autores, 2002; © Edicions UPC, 2002. 404 Máquinas térmicas motoras presión constante es también idéntica a la extracción de calor a presión constante. De forma que los términos donde sí aparecen las características del fluido se anulan entre sí al calcular el trabajo. Este fenómeno no pasa en el caso de procesos adiabáticos. 40,00 35,00 Rendimiento (%) 30,00 25,00 isotérmico 20,00 adiabático 15,00 10,00 5,00 0,00 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5 Relación de compresión Fig. 8.9 Rendimiento en función de la relación de compresión en el ciclo Rallis (100 bar, 100cm 3) Las curvas del trabajo presentan un máximo. Este factor se debe a la deformación que sufre el ciclo para relaciones de compresión bajas. Esto no pasará con el ciclo Stirling. 70,00 60,00 Trabajo (J) 50,00 40,00 isotérm ico adiabático 30,00 20,00 10,00 0,00 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5 Relación de compresión Fig. 8.10 Trabajo en función de la relación de compresión en el ciclo Rallis (100 bar, 100cm3) © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 405 8.3.3 Ciclo Stirling El ciclo Stirling (Fig. 8.11) es un caso particular del ciclo isotérmico de Rallis, en el que los procesos de transferencia de fluido desde una cámara a la otra son sólo a volumen constante. En estos procesos regenerativos los pistones de la figura 8.1 se mueven simultáneamente y con idéntica velocidad, manteniendo la distancia entre ellos. Fig. 8.11 Diagramas P-V y T-S del Ciclo Stirling (isotérmico y a volumen constante). En líneas más finas se muestra el ciclo de Carnot entre las mismas temperaturas y volúmenes. Por lo tanto, el ciclo Stirling (Fig. 8.12) consta de una compresión isoterma (1-2) a temperatura baja, una aportación de calor a volumen constante (2-3), una expansión isoterma (3-4) a temperatura alta y una extracción de calor a volumen constante (4-1). El ciclo Stirling, si el regenerador tiene eficiencia e =1, tiene como rendimiento térmico el de Carnot. Esto se debe a que los dos procesos a V constante absorben y ceden el mismo calor Qreg=Qreg , es decir, cubren áreas iguales en el diagrama T-S. Además, el ciclo Stirling, como ciclo de Rallis, genera mucho más trabajo por ciclo que el correspondiente de Carnot. : FLFOR ( 6WLUOLQJ ) > : FLFOR (&DUQRW ) η 6WLUOLQJ = η &DUQRW =1− 7 mín 7 máx (8.20) El calor extraído entre 4 y 1 puede aprovecharse parcialmente como calor aportado entre 2 y 3 mediante un regenerador. En este caso, aparece también la problemática de la dificultad de realizar expansiones y compresiones realmente isotérmicas, de manera que se introduce el cálculo del calor de expansión y compresión según curvas adiabáticas de un solo paso, que es la situación más desfavorable y a la que difícilmente se llegará en ningún caso. © Los autores, 2002; © Edicions UPC, 2002. 406 Máquinas térmicas motoras Fig. 8.12 Ciclo Stirling a) Expresiones para el cálculo del ciclo Stirling El diagrama que se sigue es el de la figura 8.12. Las variables con las que se define el ciclo son las siguientes: i. Relación de compresión ii. Presión máxima del ciclo (bar) iii. Características del gas (Cp, Cv) (J/mol·K) iv. Cilindrada (cm3) v. Temperatura máxima (K) vi. Temperatura mínima (K) vii. Regeneración (%) El objetivo es determinar el rendimiento y el trabajo por ciclo. Con la cilindrada y la relación de compresión quedan definidos el volumen máximo y mínimo: Vmín = Cilindrada Relación de compresión − 1 Vmáx = Vmín + cilindrada © Los autores, 2002; © Edicions UPC, 2002. (8.21) (8.22) 8 Motor Stirling 407 Imponiendo la presión máxima, fijado el volumen mínimo, se determina el número de moles: n= Pmáx ·Vmín R · Tmáx (8.23) Estas condiciones corresponden al punto 3. Con estos datos ya se pueden determinar las condiciones de temperatura, presión y volumen para cada punto del ciclo. Tabla 8.3 Expresiones para el cálculo de las condiciones en cada punto del ciclo 3XQWR 7HP SHUDWXUD 9ROXP HQ 3UHVLyQ 1 TC V m áx nRT 1 /V 1 2 TC V m ín nRT 2 /V 2 2’ T C +regeneración (T H- T C ) V m ín nRT 2’ /V 2’ 3 TH V m ín nRT 3 /V 3 4 TH V m áx nRT 4 /V 4 4’ T H -regeneración (T H- T C ) V m áx nRT 4’ /V 4’ Con estos valores se pueden obtener los calores transferidos en cada transformación. Compresión isoterma (1-2) Q 12 = P1 ·V1 ·ln( V2 ) V1 (8.23) Aportación de calor a volumen constante (2-2) Q22 = n · Cv · (T2 T2) (8.24) Aportación de calor a volumen constante (2-3) Q23 = n · Cv · (T3 T2) (8.25) V4 ) V3 (8.26) Expansión isoterma (3-4) Q 34 = P3 ·V 3 ·ln( © Los autores, 2002; © Edicions UPC, 2002. 408 Máquinas térmicas motoras Extracción de calor a volumen constante (4-4) Q44 = n · Cv · (T4 T4) (8.27) Extracción de calor a volumen constante (4-1) Q41 = n · Cv · (T4 T1) (8.28) Para valorar la incidencia de un comportamiento adiabático y no isotérmico, se ha calculado el trabajo que realizaría el fluido si se desplazara según una curva adiabática y no por una isoterma. Las expresiones utilizadas para el tramo 3-4 y 1-2 son las siguientes: Qadiab34 = n · Cv · (TH Tadiab34) (8.29) Qadiab12 = n · Cv · (Tadiab12 TC) (8.30) con Tadiab34 = TH · (Vmín / Vmáx)k-1 (8.31) Tadiab12 = TC · (Vmáx / Vmín)k-1 (8.32) donde k = Cp / Cv (8.33) El trabajo adiabático es inferior al isotérmico al trasladarse del punto 3 al 4, y superior al isotérmico al realizar el recorrido de 1 a 2. Por lo tanto, esta transformación adiabática afectaría al rendimiento y al trabajo, porque modifica tanto el calor aportado (3-4) como el extraído (1-2). El fluido tendería a comportarse entre las dos situaciones. b) Análisis del ciclo Stirling En el ciclo Stirling (Fig. 8.13) se observa que el rendimiento aumenta con la relación de compresión. Al sustituir las evoluciones de expansión y compresión isotermas por adiabáticas, el rendimiento presenta un máximo que depende del fluído de trabajo. Para el caso del helio éste máximo aparece en 1,5, mientras que para otros fluídos varía hasta 2. En función del fluído la pendiente decreciente a partir del máximo se reduce, suavizando el comportamiento de la curva. La evolución del trabajo (Fig. 8.14) no depende del fluido cuando la compresión y la expansión se realizan según isotermas, y siempre disminuye al aumentar la relación de compresión. Sin embargo, sí se realiza la compresión y la expansión de modo adiabático, el trabajo disminuye de forma notable y sí influyen las características del fluido. El trabajo tiende a hacerse infinito para una relación de compresión de 1. Este hecho viene dado por las expresiones utilizadas, de manera que para tener una relación de compresión 1 con una determinada © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 409 cilindrada se necesitaría disponer de volúmenes infinitos. Por lo tanto, el número de moles también lo sería y, por lo tanto, el trabajo por ciclo, que corresponde al trabajo molar por el número de moles, también sería infinito. Por lo tanto, las fórmulas pierden sentido cuando la relación de compresión se aproxima a 1. 50,00 45,00 40,00 35,00 R 30,00 WQ LH 25,00 P LG QH 20,00 5 helio helio (ADIAB) 15,00 10,00 5,00 0,00 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5 5HODFLyQGHFRPSUHVLyQ Fig. 8.13 Rendimiento en función de la relación de compresión en el ciclo Stirling (100 bar, 100cm3) 6 00 5 00 4 00 - MR D 3 00 E DU 7 helio helio (ADIAB) 2 00 1 00 0 1 1,5 2 2,5 3 3 ,5 4 4 ,5 5 5 ,5 5HODFLyQGHFRPSUHVLyQ Fig. 8.14 Trabajo en función de la relación de compresión en el ciclo Stirling (100 bar, 100 cm3) © Los autores, 2002; © Edicions UPC, 2002. 410 Máquinas térmicas motoras Para la relación de compresión infinita, el trabajo se haría cero, ya que el número de moles sería cero. Por el mismo razonamiento, el rendimiento sigue una curva asintótica que en el infinito llegaría al máximo del ciclo porque el número de moles sería cero, de manera que habría las mínimas pérdidas. 8.3.4 Ciclo Ericsson El ciclo Ericsson (Fig. 8.15) es también un caso particular del ciclo isotérmico de Rallis, en el cual los procesos de transferencia del fluido desde una cámara a la otra son sólo a presión constante. Conviene no confundir los ciclos Stirling y Ericsson con las máquinas que llevan el mismo nombre. También el ciclo Ericsson, si el regenerador tiene eficiencia e=1, tiene como rendimiento térmico el de Carnot. La razón es la misma que en el ciclo Stirling: Qreg = Qreg . Su trabajo por ciclo también supera al de Carnot. : FLFOR ( (ULFVVRQ) > : FLFOR (&DUQRW) η(ULFVVRQ = η&DUQRW = 1 − 7mín 7máx (8.34) Fig. 8.15 Diagramas P-V y T-S del ciclo Ericsson (isotérmico y a presión constante). En líneas más finas se muestra el ciclo de Carnot entre las mismas temperaturas y volúmenes. 5(*(1(5$ '2 5 5() 5,*(5 $' 25 7 P LQ & È 0 $ 5 $ ' ( & 2 0 3 5 ( 6, Ï 1 & $ / (1 7 $ ' 2 5 7 P i [ & È 0 $ 5 $ ' ( ( ; 3 $ 1 6, Ï 1 Fig. 8.16 Esquema ideal de un motor Stirling adiabático © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 411 8.3.5 Ciclo mixto Stirling-Rallis El ciclo mixto Stirling-Rallis es una concepción de ciclo intermedia a los dos anteriores que se orienta a la necesidad de conseguir el máximo trabajo por ciclo. Los dos ciclos valorados anteriormente tienen una limitación tecnológica al aplicarse en motores reales debido a la dificultad de trabajar a altas presiones. Con el ciclo mixto Stirling-Rallis se pretende sacrificar una parte del rendimiento del ciclo Stirling para intentar lograr más trabajo por ciclo, ya que a igual presión máxima, el trabajo es más grande. Sin embargo, la extracción de calor a volumen constante se puede hacer según el ciclo Stirling, pues de esta manera se aumenta notablemente el trabajo sin problemas tecnológicos, ya que se está trabajando a baja presión. Se define el ciclo mixto Stirling-Rallis (Fig. 8.17) como un ciclo con una compresión isoterma (1-2), una aportación de calor a volumen constante (2-2), una aportación de calor a presión constante (2-3), una expansión isoterma (3-4) y una extracción de calor a volumen constante (4-1). Fig. 8.17 Ciclo mixto Stirling-Rallis a) Expresiones para el cálculo del ciclo mixto Stirling-Rallis El diagrama que se seguirá es el de la figura 8.17. Las variables con las que se define el ciclo son las siguientes: i. Relación de compresión ii. Presión máxima del ciclo (bar) iii. Características del gas (cP, cV) (J/mol K) iv. Cilindrada (cm3) v. Temperatura máxima (K) vi. Temperatura mínima (K) vii. Regeneración (%) © Los autores, 2002; © Edicions UPC, 2002. 412 Máquinas térmicas motoras El objetivo es determinar el rendimiento y el trabajo por ciclo. Con la cilindrada y la relación de compresión quedarán definidos el volumen máximo y mínimo: Vmín = Cilindrada Relación de compresió − 1 (8.35) Vmáx = Vmín + cilindrada (8.36) Para determinar el número de moles es preciso determinar previamente la temperatura del punto 2. T2 = TC +regeneración (TH - TC) (8.37) Al imponer la presión máxima teniendo fijado el volumen mínimo y conociendo la temperatura en estas condiciones, se determina el número de moles: n= Pmáx ·Vmín R · T2’ (8.38) Con estos datos ya se poden determinar las condiciones de temperatura, presión y volumen para todo punto del ciclo. Tabla 8.4 Expresiones para el cálculo de las condiciones en cada punto del ciclo 3XQWR 7HPSHUDWXUD 9ROXPHQ 3UHVLyQ 1 TC Vmáx nRT 1/V 1 2 TC Vmín nRT 2/V 2 2’ T C +regeneración (T H- TC ) Vmín nRT 2’/V 2’ 3’ TH nRT 3’/P3’ P 2’ 4 TH Vmáx nRT 4/V 4 4’ T H -regeneración (T H- T C) Vmáx nRT 4’/V 4’ Y con estos valores se pueden obtener los calores transferidos en cada transformación. Compresión isoterma (1-2) Q 12 = P1 ·V1 ·ln( V2 ) V1 © Los autores, 2002; © Edicions UPC, 2002. (8.38) 8 Motor Stirling 413 Aportación de calor a volumen constante (2-2) Q22 = n · Cv · (T2 T2) (8.39) Aportación de calor a presión constante (2-3) Q23 = n · Cp · (T3 T2) (8.40) V4 ) V3’ (8.41) Expansión isoterma (3-4) Q 3’4 = P3’·V3’ ·ln( Extracción de calor a volumen constante (4-4) Q44 = n · cv · (T4 T4) (8.42) Extracción de calor a volumen constante (4-1) Q41 = n · cv · (T4 T1) (8.43) Para valorar la incidencia de un comportamiento adiabático y no isotérmico, se ha calculado el trabajo que realizaría el fluido si se desplazara según una curva adiabática en vez de por una isoterma. Las expresiones utilizadas para el tramo 3-4 y 1-2 son las siguientes: Qadiab34= n · Cv · (TH Tadiab34) (8.44) Qadiab12 = n · Cv · (Tadiab12 TC) (8.45) Tadiab34 = TH · (V3 / V4)k-1 (8.46) Tadiab12 = TC · (V1 / V2)k-1 (8.47) k = Cp / Cv (8.48) con donde El trabajo adiabático es inferior al isotérmico al trasladarse del punto 3 al 4, y superior al isotérmico al realizar el recorrido de 1 a 2. Por lo tanto, esta transformación adiabática afectaría al rendimiento y al trabajo, pues modifica tanto el calor aportado (3-4) como el extraído (1-2). El fluido tendería a comportarse entre las dos situaciones. © Los autores, 2002; © Edicions UPC, 2002. 414 Máquinas térmicas motoras b) Análisis del ciclo mixto Stirling-Rallis En el ciclo mixto Stirling-Rallis se observa (Fig. 8.18) como el rendimiento aumenta con la relación de compresión. De todas maneras, al sustituir la expansión y la compresión isotermas por adiabáticas el rendimiento tiene un máximo que aparece para una relación de compresión de 1,75, aproximadamente para el caso del helio, mientras que para otros fluidos no lo hace hasta 2,5. Por lo tanto, para una relación de compresión entre 2 y 2,5 los rendimientos son similares para todos los fluidos, considerando que el rendimiento disminuye en mayor medida cuando el máximo a aprece a menor relación e compresión. Respecto al trabajo (Fig. 8.19), todos los fluidos tienen un comportamiento muy similar al que presenta el helio, con un máximo para una relación de compresión de 1,75, aunque no sería idéntico porque el calor aportado a presión constante entre 2 y 3 es diferente al extraído entre 4 y 1. Al realizar la compresión y la expansión según evoluciones adiabáticas, el trabajo disminuye rápidamente. 45 40 35 Rendimiento (%) 30 25 helio helio (ADIAB) 20 15 10 5 0 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5 Relación de compresión Fig. 8.18 Rendimiento en función de la relación de compresión en el ciclo mixto Stirling-Rallis (100 bar, 100cm 3) El rendimiento es asintótico, de manera que el máximo para el fluido se consigue para una relación de compresión infinita. En todo caso, una relación de compresión por debajo de 1,75 implica una importante disminución del rendimiento. El trabajo presenta una rápida disminución con la relación de compresión. Sin embargo, para relaciones de compresión pequeñas el aumento asintótico del trabajo pierde sentido, ya que sólo es resultado del uso de unas expresiones que impliquen unos volúmenes infinitos parar relaciones de compresión que tienden a 1. De esta manera, el número de moles se haría infinito y, por tanto, el trabajo también. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 415 14 0 12 0 Trabajo (J) 10 0 80 he lio he lio (AD IAB) 60 40 20 0 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5 Relación de compresión Fig. 8.19 Trabajo en función de la relación de compresión en el ciclo mixto Stirling-Rallis (100 bar, 100cm3) 8.4 Analisis comparativo entre ciclos El análisis comparativo entre ciclos se realizará entre el de mayor transcendencia para el estudio del motor Stirling, el ciclo de Rallis, el ciclo Stirling y el mixto, ya que el ciclo de Ericsson se orienta a máquinas de flujo continuo . Por consiguiente, el análisis comparativo de los ciclos Rallis, Stirling y mixto, entre los límites que suponen las evoluciones totalmente isotérmicas o totalmente adiabáticas permite evaluar la idoneidad de una u otra concepción en la realización de un motor Stirling . 8.4.1 Análisis de la relación de compresión La relación de compresión afecta de forma fundamental al rendimiento y el trabajo de los diferentes ciclos termodinámicos. Cuando los ciclos realizan la expansión y la compresión según una isoterma, el rendimiento aumenta con la relación de compresión, pero de forma asintótica, de manera que el incremento más grande se encuentra entre relaciones de compresión de 1,5 y 3. Sin embargo, al realizar la expansión y la compresión según una adiabática, el rendimiento tiene un máximo alrededor de una relación de compresión de 2,5. Esto significa que para obtener un rendimiento óptimo se necesita trabajar con una relación de compresión entre 2 y 3. © Los autores, 2002; © Edicions UPC, 2002. 416 Máquinas térmicas motoras Tc Tn P ciclo Stirling Pmax ciclo mixto Stirling-Rallis ciclo Rallis Vmin / n Vmax / n V/n Fig. 8.20 Comparativa de ciclos La relación de compresión influye sobre el trabajo de manera que, en general, el trabajo disminuye al aumentar la relación de compresión. En los ciclos Rallis y mixto Stirling-Rallis aparecen máximos locales debidos a la configuración del ciclo, que se deforma hasta volverse incoherente para relaciones de compresión excesivamente bajas. Según el parámetro del trabajo, convendría tener una relación de compresión tan pequeña como fuera posible, aunque superior a 1,75 para evitar problemas de deformaciones de los ciclos Rallis y mixto Stirling-Rallis. Por tanto, se considera que una relación de compresión óptima se encuentra entre 2 y 2,5. El rendimiento máximo (Fig. 8.21) se consigue en el ciclo Stirling, mientras que el ciclo Rallis presenta el peor rendimiento. El ciclo mixto Stirling-Rallis muestra un rendimiento intermedio, aunque más próximo al del Stirling. Sin embargo, si se consideran los ciclos con expansiones y compresiones adiabáticas en lugar de isotérmicas, la situación se invierte absolutamente y es el ciclo Rallis el que no pierde tanto rendimiento. De todas maneras, considerando una relación de compresión entre 2 y 2,5, el rendimiento adiabático del ciclo mixto Stirling-Rallis es similar al del Rallis, mientras que el Stirling tiene un rendimiento notablemente inferior. Esto significa que en cuanto a rendimiento, el ciclo más adecuado es el mixto Stirling-Rallis. Respecto al trabajo, el ciclo que más trabajo entrega es el mixto Stirling-Rallis en condiciones de expansiones y compresiones isotermas. En expansiones y compresiones adiabáticas, el ciclo Rallis entrega más trabajo a partir de relaciones de compresión más grandes de 2. Pero para una relación de compresión de 2, el trabajo es similar para ciclo Rallis que para ciclo mixto Stirling-Rallis. Por tanto, trabajando con una relación de compresión de 2, el ciclo que entrega más trabajo es el mixto Stirling-Rallis. Considerando que tecnológicamente el ciclo mixto Stirling-Rallis no presenta unas complicaciones superiores a la de los otros ciclos, se concluye que el ciclo ideal más adecuado es el mixto Stirling-Rallis. © Los autores, 2002; © Edicions UPC, 2002. 417 Rendimiento (%) 8 Motor Stirling Relación de compresión Trabajo (J) Fig. 8.21 Rendimiento en función de la relación de compresión para diferentes ciclos Relación de compresión Fig. 8.22 Trabajo en función de la relación de compresión para diferentes ciclos (100 bar, 100cm3) © Los autores, 2002; © Edicions UPC, 2002. 418 Máquinas térmicas motoras 8.4.2 Análisis del salto térmico Rendimiento El salto de temperatura entre las dos fuentes afecta tanto al rendimiento como al trabajo del ciclo, aumentándolos cuanto más grande sea el salto térmico. Sin embargo, una variación de la temperatura máxima no afecta tanto como un incremento de la temperatura mínima. Salto térmico Fig. 8.23 Rendimiento en función del salto térmico para diferentes temperaturas de la fuente fría (ciclo Stirling) Este concepto se puede apreciar con claridad en las figuras 8.22 y 8.23, en las que se representa el rendimiento y el trabajo respectivamente en función del salto térmico y con diferentes temperaturas iniciales como series. De aquí se desprende que a igual salto térmico, cuanto más baja sea la temperatura delfoco frío, el ciclo dará más rendimiento y trabajo. El ciclo de las figuras es el Stirling, pero los resultados son equivalentes para los otros ciclos. Según esto, se necesita tener más cuidado controlando la temperatura inferior que la superior, aunque en los dos casos se puede observar una caída del rendimiento y del trabajo al producirse una variación de las temperaturas de las fuentes que implique una disminución del salto térmico. Un descenso de la temperatura de 25ºC a 0ºC implica un aumento del rendimiento en un 3% (Fig. 8.25) y un aumento del trabajo (Fig. 8.24) que son valores que pueden representar un importante aumento de potencia. © Los autores, 2002; © Edicions UPC, 2002. 419 Trabajo (J) 8 Motor Stirling Salto térmico Rendimiento (%) Fig. 8.24 Trabajo en función del salto térmico para diferentes temperaturas de la fuente fría (Ciclo Stirling) Salto térmico Fig. 8.25 Rendimiento en función de TC con TH=673K para diferentes ciclos © Los autores, 2002; © Edicions UPC, 2002. Máquinas térmicas motoras Trabajo (J) 420 Temperatura fría (K) Trabajo (J) Fig. 8.26 Trabajo en función de TC con TH=673K para diferentes ciclos Temperatura fría (K) Fig. 8.27 Trabajo en función de TC con TH=673K para diferentes ciclos © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 421 8.4.3 Correlación entre variables Los trabajos (considerados isotérmicos o adiabáticos) son directamente proporcionales a la cilindrada y a la presión máxima. Sin embargo, los rendimientos son invariables respecto la presión máxima y la cilindrada. Se observa como un incremento de la relación de compresión significa un incremento asintótico del rendimiento isotérmico, pero una rápida disminución del rendimiento adiabático. En cuanto a los trabajos, un aumento de la relación de compresión implica, en general, una disminución del trabajo, tanto isotérmico como adiabático. La capacidad calorífica molar del fluido incide de manera que, en general, cuanto menor sea la capacidad calorífica molar, mayor es el rendimiento isotérmico, pero menor el adiabático. Respecto al trabajo, la capacidad calorífica no afecta en absoluto en los ciclos de Rallis y Stirling y sólo ligeramente en el ciclo mixto Stirling-Rallis. En cambio, el trabajo adiabático sí es mucho menor si la capacidad calorífica molar es pequeña. El régimen de giro del motor afecta de forma directamente proporcional a la potencia del motor. Sin embargo, el régimen de giro está limitado por cuestiones fluidodinámicas. K Variable LVR K DGLDE : LVR : DGLDE ↑ Pmáx ↑ Cilindrada ↑ Régimen de giro ↑ Rel. Compresión ↑ Cap. Calorífica molar ↓ TH ↑ TC Tabla 8.5 Relaciones orientativas entre variables 8.5 Influencias del mecanismo en el ciclo termodinámico La realización de un determinado ciclo teórico depende de las peculiaridades del mecanismo en el que opera el fluido motor, tanto en la determinación del ajuste de las evoluciones isotérmicas como del ajuste de la evolución de volumen de las cámaras. Este último aspecto es primordial y determinante en las © Los autores, 2002; © Edicions UPC, 2002. 422 Máquinas térmicas motoras implementaciones del motor Stirling, porque como ya se vio en el apartado 8.2, los requisitos de variación de volumen impuestos por el ciclo son difícilmente asumibles por el mecanismo. A continuación se analiza al ciclo termodinámico ideal realizado en un mecanismo de motor Stirling de pistones opuestos, accionados mediante un mecanismo biela-manivela y con un desfase de 90º entre ellos que determina conjuntamente la evolución de volumen de ambas cámaras. En la figura 8.28 se obtiene la variación del volumen de ambas cámaras, así como el volumen total del recinto definido entre ellas, donde debe alojarse el regenerador, que se supone de volumen nulo. El ajuste de evolución de volumen definido en el apartado 8.2 como el necesario para la realización del ciclo no se ajusta a la evolución observada, ya que básicamente se observa correlación en los 0º con el estado 3 en el que la cámara fría se encuentra a volumen mínimo y la caliente a intermedio. Si se grafican los volumenes de modo contrapuesto (Fig. 8.29), se observa que la evolución de las partes 2 a 3, en las que se trasvasa el fluido de la cámara fría a la caliente, se corresponderá con los volúmenes que ocurren entre los 270º y los 350º. En consecuencia, el ciclo se defroma bajo este mecanismo se deforma manteniendo sólo la evolución 2-3 de modo correcto; el resto de evoluciones se diluyen realizándose de modo simultáneo en ambas cámaras comunicadas y únicamente separadas por el efecto ideal del regenerador. Por consiguiente, la expansión se realiza permitiendo la fuga de fluido de la cámara caliente a la fría y la compresión se realiza del mismo modo. Todos estos efectos comportan una pérdida muy importante de capacidad de trabajo, ya que no se confina adecuadamente el fluido en las cámaras de expansión y compresión. 4 3,5 3 2,5 Volumen frío Volumen caliente 2 Volumen Total 1,5 1 0,5 0 0 50 100 150 200 250 300 350 400 Fig. 8.28 Progresión de los volúmenes frío, cliente y total para un motor Stirling de arquitectura simple y dos pistones con un desfase de 90° © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 423 4 1,2 3 1 2 0,8 1 0,6 caliente fría Diferencia Porcentaje 0 0 50 100 150 200 250 300 350 0,4 400 -1 0,2 -2 0 -3 -0,2 Fig.8.29 Evolución de los pistones en una arquitectura de simple acción de dos pistones desfasados 90º 8.6 Regenerador En un motor Stirling el regenerador tiene como misión ocasionar el salto térmico del fluido de trabajo alternativamente entre Tmáx y Tmín, sin aportación externa de calor. El calor liberado por el fluido al pasar desde la cámara de expansión hacia la de compresión más fría es almacenado en el regenerador, para ser devuelto al fluido al pasar en sentido contrario. Este reciclaje energético es fundamental para el buen rendimiento y viabilidad del motor Stirling. Además, el regenerador, situado siempre entre el calentador y el refrigerador, tiene que ser capaz de permitir el paso correctamente del fluido de trabajo entre estos dos elementos. 8.6.1 Análisis de la regeneración Tal y como se ha dicho anteriormente, el regenerador ideal tiene que enfriar y calentar el fluido hasta las temperaturas TH y TL. El análisis del comportamiento del regenerador, que se va a exponer a continuación, parte de dos modelos: el modelo de la capacidad térmica y del modelo de las diferencias finitas (que no se planteará pero ha sido usado en los siguientes resultados). El modelo de capacidad térmica global asimila un comportamiento homogéneo a un determinado volumen, y se puede aplicar en el caso de que el número de Biot (8.49) sea menor que 0,1. El número de Biot se define como: %L = KF/ N V © Los autores, 2002; © Edicions UPC, 2002. (8.49) 424 Máquinas térmicas motoras donde: hc: coeficiente de transferencia de calor por convección. Puede suponerse varias condiciones dependiendo del tipo de flujo (laminar o turbulento). Es función del fluido escogido. Ks: conductividad térmica del material del regenerador. Y es aquí donde supondremos dos materiales diferentes para realizar el estudio. Uno de ellos tendrá una conductividad muy baja, mientras que el otro tendrá una conductividad superior en una proporción de 250 veces mayor. L: longitud del regenerador Imponiendo Bi=0 ,1 se obtiene, para un fluido y unos materiales representativos los siguientes valores indicativos: Se considera que el flujo es laminar, y por tanto, si se usa el material con elevada conductividad térmica, el modelo de la capacidad térmica global se puede asumir sin inconvenientes. En los otros casos la longitud del regenerador sería más destacable, pero ya permite considerar gradientes de temperatura dentro del regenerador si este no es reducido en exceso. Por tanto se analiza un conjunto regenerador suficientemente reducido y conductor (respecto la convección) como para considerarlo como un volumen de comportamiento homogéneo (regenerador único). 8.6.2 Regenerador único La transferencia de calor entre regenerador y fluido se mantendrá hasta que la temperatura de los dos se iguale. Esta temperatura de equilibrio dependerá de la relación de masa y de la capacidad calorífica entre fluido y regenerador. Además, la temperatura final del regenerador será la temperatura de partida cuando el fluido circule en sentido inverso, de manera que si después de la etapa de enfriamiento del fluido la temperatura resulta muy baja, se producirá una baja aportación de calor en la fase de calentamiento. Para el cálculo de la regeneración se plantea un método numérico, según una serie de etapas. a) Etapas y expresiones para el cálculo de la regeneración Se seleccionan cuatro estados y las dos transferencias de calor (definidas en el regenerador). Las variables usadas son: Tf : Temperatura del fluido TR : Temperatura del regenerador TH : Temperatura de la fuente caliente TC : Temperatura de la fuente fría TRi : Temperatura que se recalcula para cada ciclo mf : Masa del fluido Cvf : Capacidad calorífica a volumen constante del fluido mR : Masa del regenerador CR : Capacidad calorífica del regenerador © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 425 hR : Coeficiente de convección del regenerador AR : Área de transferencia de calor del regenerador Los estados son: Estado 1: El fluido sale de la fuente caliente y entra al regenerador Tf = TH (8.50) TR = TR1 (8.51) Transferencia 1-2: El fluido y el regenerador hacen un intercambio de energía Qf = mf Cvf (TH TR2) (8.52) QR = mR CR (TR2 TR1) (8.53) Qf = QR (8.54) Estado 2: El fluido sale del regenerador a igual temperatura que el regenerador para entrar en la fuente fría. Tf = TR2 (8.55) TR = TR (8.55) Estado 3: El fluido sale de la fuente fría y entra en el regenerador. Tf = TC (8.56) TR = TR2 (8.57) Transferencia 3-4: El fluido y el regenerador hacen un intercambio de energía Qf = mf Cvf (TR3 TC) (8.58) QR = mR CR (TR2 TR3) (8.59) Q f = QR (8.60) m R ·C R TR1 + TH m f ·Cv f TR2 = m R ·C R +1 m f ·Cv f © Los autores, 2002; © Edicions UPC, 2002. (8.61) 426 Máquinas térmicas motoras Estado 4: El fluido sale del regenerador a igual temperatura que el regenerador para entrar en la fuente caliente. Tf = TR3 (8.62) TR = TR3 (8.63) En las transferencias de calor se supone un intercambio de calor perfecto al considerar que el regenerador es capaz de transmitir por convección más calor que el que puede absorber el fluido. Qf = mf Cvf (∆T)f (8.64) QR convección = hR AR (∆T)R (8.65) QR convección > Qf (8.66) Este aspecto, por tanto, se tendrá que tener en cuenta cuando se tenga que diseñar un regenerador. De estas expresiones se desprende que la temperatura a la que queda el regenerador después de cada transferencia con el fluido, teniendo las temperaturas de las fuentes fijadas, depende de la relación mRCR/ mfCvf. La máxima temperatura que se puede conseguir después de cada intercambio es la intermedia entre las dos fuentes, siempre que los procesos en un sentido y en el otro sean simétricos. Para conseguir la máxima tranferencia de calor es preciso que la temperatura del regenerador sea tan estable como sea posible y, por tanto, que la relación mRCR/mfCvf sea grande. Esto implica que cuanto más alta sea la capacidad calorífica del regenerador respecto la del fluido, más constante será la temperatura de regeneración y más se acercará a un comportamiento de fuente térmica, estabilizada para el fluido. En el caso ideal se tendría una regeneración del 50%, definiendo la regeneración según la siguiente expresión: Regeneraci ón = donde: TH − TE x 100 TH − TC (8.67) TH : Temperatura de la fuente caliente TC : Temperatura de la fuente fría TE : Temperatura de estabilización cuando el fluido circula de la fuente caliente a la fuente fría Idealmente se tendría que tender a un regenerador con una relación de capacidad calorífica infinita respecto a la del fluido. Pero se comprueba que para relaciones bajas, la regeneración ya es bastante elevada sin necesidad de recalentar el regenerador, porque éste llega en pocos ciclos a las temperaturas de equilibrio. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 427 b) Cálculo numérico de la regeneración Con estas consideraciones explicadas anteriormente se puede valorar con simulación numérica para obtener resultados. Tomando unas temperaturas de las fuentes particulares y para diferentes relaciones de mRCR/mfCvf (1, 2, 4, 9). Con ello se observa que cuanto más baja es la relación mRCR/mfCvf, más rápida es la convergencia hacia los valores de temperatura definitivos. Pero, al mismo tiempo, más grande es el intervalo entre Tmáx y Tmín para la misma relación, cuando el fluido circula en un sentido o en el otro, y por esto tienen una menor regeneración. De este cálculo se desprende que es preciso un regenerador con alta capacidad para almacenar energía para que su temperatura sea estable. Esta capacidad viene dada por el producto de su masa y de su capacidad calorífica. Por tanto el regenerador necesita una masa elevada y una capacidad calorífica también elevada. El regenerador estudiado con este modelo presenta una regeneración máxima del 50 %, hecho que nos conduce a buscar más soluciones para intentar aumentar la regeneración. 8.6.3 Regeneradores en serie Una solución posible para intentar sobrepasar el 50% de regeneración sería colocar varios regeneradores separados entre sí. Esto implica reducir la conductividad térmica del regenerador global en el sentido del flujo del fluido. Usando las mismas expresiones que para el cálculo de un regenerador, se obtiene una evolución del porcentaje de regeneración en función de la proporción mf/mr con diferentes números de etapas. Esta evolución nos dice que: -Cuantas más etapas, mayor gradiente de temperaturas en el interior del regenerador. -Cuanto mayor sea mrCr/mfCvf más constante es el gradiente, independientemente del sentido del flujo. Por tanto, para conseguir la máxima regeneración es preciso un regenerador poco conductor internamente en el sentido del flujo y que presente un producto de la masa por la Cr mucho más grande que el del fluido. Esto se puede conseguir, como ya se ha dicho, con varios regeneradores separados entre si o con un regenerador que presente una muy baja conductividad térmica, el cual tendrá en su interior el gradiente de temperaturas que tendría la serie de etapas. Además de las premisas que se acaban de citar existen otras características que tiene que cumplir el regenerador para un buen funcionamiento del motor: -El tiempo de regeneración tiene que ser pequeño, debido a los altos regímenes de los motores actuales. Y es aquí donde se observa uno de los problemas en la aplicación de un motor Stirling, pues los procesos estudiados resultan ser de periodos muy superiores a los fijados por la necesidad del motor. -El regenerador tiene que anular el volumen muerto de su interior en cuanto le sea posible. -El fluido tiene que pasar por el interior del regenerador sin resistencia alguna. © Los autores, 2002; © Edicions UPC, 2002. 428 Máquinas térmicas motoras 8.7 Elementos mecánicos Las soluciones mecánicas de los motores Stirling son diversas y cumplen un mismo esquema general. Disponen de dos cámaras a diferente temperatura, el volumen de las cuales puede variar gracias al movimiento alternativo de dos émbolos. Un conducto, que atraviesa un regenerador y unos posibles intercambiadores de calor auxiliares, comunica una cámara con la otra. El fluido de trabajo es desplazado por el interior de estos espacios gracias al movimiento de los dos émbolos. La figura 8.30, muestra el ejemplo de una posible configuración de un motor Stirling. Pueden observarse los elementos básicos del motor tal y como se disponen en la realidad. Fig. 8.27 Posible configuración de un motor Stirling real. A- cámara de compresión, B- cámara de expansión, C- regenerador, D- calentador, E- refrigerador, F- calentador auxiliar, G- refrigerador auxiliar. En los siguientes apartados se analizan las posibles configuraciones y las características de los elementos mecánicos del motor. 8.7.1 Tipologías de motores El cilindro es la materialización de la cámara de volumen variable. Un extremo está abierto hacia los intercambiadores de calor y el otro está cerrado por el émbolo, el cual determina las variaciones de volumen. La forma cilíndrica viene impuesta por la facilidad de la construcción. El material suele ser metálico para una buena conducción térmica, y el grosor de la pared depende de la presión máxima del fluido de trabajo. El émbolo puede ser de tres tipos, según la función que tenga: a) Pistón b) Desplazador c) Mixto (pistón y desplazador) © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 429 Se habla de pistón cuando el émbolo debe resistir una diferencia elevada de presión entre sus dos caras, pero no ha de soportar, en cambio, ningún salto térmico apreciable entre el fluido de trabajo y el exterior. El pistón ha de ser robusto y con buenos elementos de estanqueidad para soportar la presión, por esto suele ser metálico. La pérdidas por conducción térmica no representan ningún problema, porque son mínimas. Un desplazador, en cambio, es un émbolo que trabaja con presiones muy parecidas en los dos lados, pero que ha de soportar un elevado gradiente térmico. Su resistencia y estanqueidad no son críticas, mientras que el aislamiento térmico sí que lo es. Acostumbra a ser un elemento axialmente largo, que contiene material aislante en su interior. Sus paredes, metálicas, son delgadas, para evitar la conducción, y tienen forma redondeada, para evitar concentraciones de tensión y fatiga del material, que se encuentra debilitado por la temperatura. El émbolo mixto, o también pistón/desplazador, es aquel que ha de soportar un fuerte gradiente térmico acompañado de una elevada diferencia de presiones. Su diseño requiere un equilibrio entre aislamiento y resistencia, que a menudo es difícil de encontrar. Tabla 8.6 Diferenciación entre pistón, desplazador y émbolo mixto Pistón Gran ∆P Pequeño ∆Τ Desplazador Pequño ∆P Gran ∆Τ Mixto Gran ∆P Gran ∆Τ Según la disposición de cilindros, pistones y desplazadores, los motores Stirling pueden clasificarse según se especifica en el siguiente subapartado. 8.7.2. Tipologías de arquitecturas a) Arquitectura de émbolos de simple acción Las arquitecturas de émbolos de simple acción se dividen en tres grandes grupos: - Doble pistón - Pistón-desplazador - Pistón líquido La arquitectura de doble pistón, también llamada alfa, se caracteriza por presentar un émbolo que es un pistón y el otro un pistón/desplazador, que se mueven en dos cilindros diferentes (Fig. 8.31). Es la configuración más intuitiva, pero se aplica sólo en motores grandes, en que el peso no es un factor determinante. © Los autores, 2002; © Edicions UPC, 2002. 430 Máquinas térmicas motoras Fig. 8.31 Motores Stirling de simple acción y doble pistón. a) Cilindros paralelos (Rider), b) Cilindros en V, c) Cilindros opuestos En la configuración de pistón-desplazador uno de los émbolos es un pistón y el otro es un desplazador. Con esta configuración, la presión del fluido está soportada sólo por un pistón, que, además, trabaja a baja temperatura; esto reduce el problema de la estanqueidad. También, siendo el desplazador más ligero que un pistón, se disminuye la masa oscilante y las vibraciones y, en consecuencia, se reducen las dimensiones de cojinetes, bielas, etc. Es la configuración más utilizada en motores de poca potencia, pero también se utiliza en los de potencias superiores. Presenta dos alternativas: 1. De cilindro único (Fig. 8.32): tipo beta 2. De doble cilindro (Fig. 8.34): tipo gamma La configuración de cilindro único reduce el espacio muerto al mínimo y da al motor máxima compacidad. Por el otro lado, la disposición de doble cilindro ofrece mucha más libertad en el diseño de la transmisión hacia un eje giratorio y facilita la construcción y el montaje. En los motores Stirling de pistón líquido los émbolos son superficies libres de un líquido. El gas de trabajo es impulsado y comprimido gracias al movimiento de la columna líquida al largo de los cilindros. Presenten muchas variantes constructivas, pero la mayoría sigue el esquema básico mostrado a la figura 8.34, formado por dos columnas en U, una que actúa como a desplazador y la otra como pistón. Tienen la ventaja de ser muy sencillos y económicos, pero presentan problemas de evaporación del líquido y de pérdidas de carga por fricción. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 431 Fig. 8.32 Motores Stirling de simple acción con pistón y desplazador en cilindro único. a) Con regenerador externo (Rankine-Napier), b) Con desplazador regenerativo (Stirling), c) De pistones libres (Beale) Fig. 8.33 Motor Stirling de simple acción con pistón y desplazador líquidos. Modelo «fluidyne» de West. A- desplazador líquido, B- pistón líquido, C- salida de potencia, D- espacio frío, E- regenerador, F- Espacio caliente. b) Arquitectura de émbolos de doble acción En los que el elemento alternativo es un pistón/desplazador (mixto) que trabaja por las dos caras: uno comprime el gas de un ciclo mientras que el otro expansiona el de otro ciclo, o viceversa. En consecuencia, el número de ciclos termodinámicos coincide con el de cilindros y con el de émbolos, y siempre es más grande o igual a dos. Se trata, pues, de motores multiciclo. La figura 8.35 ofrece dos alternativas de diseño. © Los autores, 2002; © Edicions UPC, 2002. 432 Máquinas térmicas motoras Fig. 8.34 Motores Stirling de simple acción con pistón y desplazador en doble cilindro. a) Con regenerador externo (Heinrici), b) Con desplazador regenerativo (Laubereau-Schwartzkopff), c) Con desplazador. regenerativo y cilindros a 90° (Robinson), d) Doble cilindro de expansión (Rainbow) Fig. 8.35 Motores Stirling de doble acción. a) Doble cilindro (Franchot), b) Multicilindro (Siemens) con los cilindros dispuestos circularmente Presentan la ventaja de tener la mitad de piezas móviles que los de simple acción, cosa que facilita la estanqueidad y hace más económico el motor. Su inconveniente recae en la poca flexibilidad de diseño que ofrecen. Se aplican sobre todo para potencias superiores a 20 kW. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 433 8.7.3 Acoplamiento de los émbolos y extracción de potencia La disposición de los émbolos en una determinada configuración de motor determina el modo de extracción de la potencia generada por el motor. Este tipo de motores admiten tanto la configuración de salida de potencia lineal como rotativa, aunque en determinadas configuraciones la primera es obligada. En este sentido, es determinante la tipología de aclopamiento de los émbolos, distinguiéndose tres casos principales: a) Émbolo acoplado mecánicamente b) Émbolo no acoplado mecánicamente c) Émbolo de acoplamiento híbrido En el mundo de la ingeniería, está muy extendida la costumbre de asociar el término potencia mecánica con potencia de eje, ya que la mayoría de motores térmicos actuales transmiten su fuerza de forma rotativa. Los motores Stirling, en cambio, admiten a menudo salidas de potencia lineales, y en algunas de sus configuraciones, la forma lineal resulta obligada. Potencia rotativa: es la forma más empleada y más bien estudiada. La mayoría de dispositivos receptores de potencia disponen de entrada rotativa, aunque después algunos hayan de reconvertirla en lineal. Potencia alternativa (lineal): a pesar de ser una forma poco utilizada, presenta bastantes ventajas respecto a la rotativa: los pistones y otros elementos de transmisión no sufren fuerzas laterales, sino sólo axiales, hecho que minimiza el problema de la lubricación. También permite el uso de obturadores flexibles para un hermetismo absoluto. Las aplicaciones son muchas: desde el accionamiento de generadores eléctricos lineales y bombas o compresores de pistones, hasta la impulsión de otras máquinas Stirling actuando como bombas de calor. La transmisión de potencia rotativa requiere un sistema que transforme el movimiento lineal del pistón en rotativo. Este sistema mecánico se puede aprovechar para dar a los dos émbolos del motor un movimiento aproximadamente senoidal y con un desfase fijo. La transmisión lineal de potencia, en cambio, no tiene manera de mantener una ley de movimientos relativos fija entre los émbolos. Esta diferenciación permite clasificar los motores Stirling como se describe a continuación, según el acoplamiento de los émbolos con el sistema de salida de potencia. a ) Émbolos acoplados mecánicamente El acoplamiento mecánico, a la vez que permite la transmisión de la potencia, de forma directa determina la ley de movimientos relativos entre los dos émbolos. Para hacer que esta ley sea cíclica es casi indispensable que el mecanismo culmine en algún elemento rotativo, y en consecuencia este tipo de motores son siempre de potencia rotativa. La rotación puede transmitirse al exterior mediante un árbol que sobresale de la carcasa, o bien, por arrastre magnético entre dos platos imantados separados por una pared. Esta última configuración permite el hermetismo de la carcasa, la cual puede ser presurizada. © Los autores, 2002; © Edicions UPC, 2002. 434 Máquinas térmicas motoras Según la disposición de los cilindros y los émbolos, los mecanismos de acoplamiento pueden ser: i. Para émbolos coaxiales (Fig. 8.36) ii. Para émbolos no coaxiales (Fig. 8.37) iii. Para émbolo único (Fig. 8.38) Como muestran las figuras 8.36, 8.37 y 8.38, los acoplamientos pueden ser sencillos o complejos, compactos o voluminosos, inductores o no de fuerzas laterales en los émbolos, y ajustables o no a una buena ley de movimiento alternativo. Los factores que determinen la elección de uno u otro varían en cada caso. Fig. 8.36 Acoplamientos mecánicos para motores Stirling de dos émbolos coaxiales. a) Acoplamiento rómbico (Mejer), b) De manivela y balancín (Clarke), c) De manivela y cursor Fig. 8.37 Acoplamientos mecánicos para motores Stirling de dos émbolos no coaxiales. a) Acoplamiento de Ross, b) De plato oscilante b ) Émbolos no acoplados mecánicamente También se llaman motores Stirling resonantes o de pistón libre; son máquinas en las cuales los émbolos se mueven libremente, sólo afectados por las presiones del fluido y por sus propias inercias, oscilante a una frecuencia de resonancia. Como no están unidos mecánicamente, no tienen una ley de movimiento preestablecida. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 435 Fig. 8.38 Acoplamientos mecánicos para motores Stirling de émbolo único. a) Biela y cigüeñal, b) Cigüeñal y biela con guiaje lineal, c) Cigüeñal y biela con guiaje por balancín La salida de potencia del motor es forzosamente alternativa, ya que la conexión con un eje impondría una ley de movimiento. Es precisamente el dispositivo receptor el que actúa como freno del motor, evitando que la resonancia sea destructiva. A pesar de que son de cálculo complicado, tienen características muy competitivas: pocas piezas móviles, auto-arranque, pocos problemas de lubricación, bajo coste y larga vida útil. Todas las configuraciones de cilindros y émbolos vistas son válidas para motores Stirling de pistón libre. La figura 8.39, muestra algunos ejemplos. desplazador pistón muelles de gas Fig. 8.39Motores Stirling de «pistón libre». a) De pistón-desplazador, b) De pistón líquido o «fluidyne» de West © Los autores, 2002; © Edicions UPC, 2002. 436 Máquinas térmicas motoras c ) Motores Stirling de acoplamiento híbrido Se trata de motores de simple acción con pistón y desplazador, en los que el pistón está mecánicamente unido a una salida de potencia rotativa (biela y cigüeñal), mientras que el desplazador se deja libre, resonando. Pueden ser de doble cilindro (tipo Ringbom) o de cilindro único (tipo Kolin). 8.7.4 Elementos de estanqueidad y lubricación Los émbolos de un motor Stirling deben de proporcionar una buena estanqueidad, ya que de lo contrario el rendimiento se ve muy reducido. El problema se agudiza cuando el fluido de trabajo utilizado no es aire sino helio, hidrógeno u otros, en los que cabe evitar fugas porque su reposición es cara. Si a esto se suma el hecho de que el trabajo proporcionado por un ciclo es proporcional a la presión media del ciclo, y que, por lo tanto, se tenderá a presiones tan altas como se pueda, el problema de la estanqueidad pasa a ser de gran importancia. Las soluciones que se emplean pueden agruparse así del siguiente modo: a) Cárter presurizado: la mejor manera de evitar fugas de fluido hacia el exterior consiste en cerrar herméticamente el cárter que aloja el sistema de extracción de potencia (cigüeñal u otros), y presurizarlo a una presión igual a la media del ciclo. De esta manera los pistones sólo aguantan un ∆P entre la media y la máxima del ciclo. Los obturadores de los pistones, por lo tanto, pueden ser más sencillos. Pero, ¿cómo se realiza la salida de potencia desde un cárter cerrado y presurizado? Si la salida es rotativa, hace falta situar un obturador sobre el eje, parecido a los retenes de aceite del cárter de un motor de explosión; o bien, transmitir el movimiento mediante platos de arrastre magnético, que permiten el hermetismo total. Si la salida es alternativa, la completa estanqueidad se consigue con membranas elásticas, o bien, extrayendo potencia eléctrica gracias al un generador lineal. b) Cárter no presurizado: La presurización del cárter supone un refuerzo de las paredes de éste y un aumento general de peso del motor, cosa que a menudo se procura evitar. La no presurización obliga a los pistones a incorporar obturadores muy eficientes. Sistemas como diafragmas rotativos, anillos de rulón-A (teflón), y ajustes por tolerancia laberínticos, consiguen una buena obturación sin demasiada fricción. Aun así, queda mucho por estudiar en esta línea. La lubricación de los elementos móviles del motor es la condición para que éste tenga una vida útil prolongada. En prototipos, la lubricación seca con teflón o el uso de obturadores impregnados de aceite ya son suficientes, pero en dispositivos comerciales, la lubricación con aceite es obligada. Sólo los motores de pistón libre pueden fabricarse sin lubricación, ya que aprovechan el mismo gas de trabajo como elemento lubricante. El uso del aceite en los motores Stirling añade otra función a los obturadores: evitar que este aceite se propague hacia las cámaras de trabajo. Si entra dentro del ciclo termodinámico, se acumulará en el regenerador que actúa como filtro y se taponará, causando importantes pérdidas de rendimiento. Por ese motivo muchos pistones disponen de doble obturación, tanto de aceite como de gas. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 437 8.7.5 Características de los elementos mecánicos Una de las grandes ventajas de los motores Stirling, respecto a los motores de explosión, es la suavidad de funcionamiento y las bajas relaciones de compresión (alrededor de 2) que deben alcanzarse. Por lo tanto, sus componentes mecánicos están relativamente poco solicitados: cigüeñal, bielas, cojinetes, rodamientos, pistones, cárter, cilindros, etc., tienen un peso y unas dimensiones mucho menores a las de otros motores, así como una vida útil más prolongada. El único enemigo de la mecánica de los motores Stirling es la alta temperatura que alcanzan algunas sus piezas, como las que envuelven la cámara de expansión. La elección del material y el diseño de estos elementos debe ser muy cuidadoso, teniendo en cuenta su fatiga tanto mecánica como térmica. 8.8 Elementos térmicos Los principales elementos térmicos en un motor Stirling son los intercambiadores de calor. Son partes del motor que, a pesar de tener que cumplir funciones mecánicas como soportar la presión y conducir el fluido, tienen una función primordialmente térmica, que es transmitir calor de un medio a otro. Tabla 8.7 Nomenclatura y función de los intercambiadores de calor en máquinas Stirling 'HQRPLQDFLyQHQ PRWRUHV 'HQRPLQDFLyQHQERPEDVGHFDORU )XQFLyQ 5HIULJHUDGRUHV &DOHIDFWRUHV Calentador Enfriador Absorvidor Absorve calor del exterior y la cede al fluido de trabajo. Es la salida de la cámara de expansión Enfriador Disipador Calentador Absorve calor del fluido de trabajo y la cede al exterior. Es la salida de la cámara de compresión Regenerador Regenerador Regenerador Absorve calor del fluido de trabajo cuando lo atraviesa e un sentido y lo guarda para devolvérselo cuando pasa en sentido contrario Precalentador Precalentador Precalentador En motores calentados por combustión, calienta, con los humos, el aire comburente. En bombas de calor, calienta o enfría el aire entrante mediante el aire residual © Los autores, 2002; © Edicions UPC, 2002. 438 Máquinas térmicas motoras La tabla 8.7 define los tres intercambiadores de calor de que suele disponer un motor Stirling. Los tres primeros: calentador, refrigerador y regenerador, actúan sobre el fluido de trabajo y son de presencia obligada. Algunas máquinas pequeñas aparentan no disponer de alguno de estos elementos, pero de hecho sí que los tienen, aunque reducidos a la mínima expresión. El último, el precalentador, actúa sobre el fluido que transfiere el calor al exterior del calentador, y por lo tanto, no es estrictamente necesario para el funcionamiento del motor. La razón de su uso es la mejora en el rendimiento global de la máquina. En la figura 8.40 se observa la situación física de cada uno de estos intercambiadores, de forma esquemática, en un motor Stirling. Humos Aire Agua refrigerada Aire pre-calentado Agua caliente Combustible Fig. 8.40 Esquema de un motor Stirling calentado por combustión. Los intercambiadores de calor son: A- Calentador, B- Refrigerador, C- Regenerador, D- Precalentador. El diseño de los intercambiadores de calor debe cumplir tres puntos básicos: a) Ofrecer el mínimo volumen muerto posible. Si este volumen crece, el ciclo termodinámico se desplaza hacia la derecha en el diagrama P-V, y su área disminuye, proporcionando menos potencia. b) Rentabilizar al máximo el espacio muerto usado, haciendo un intercambio de calor por unidad de volumen tan grande como sea posible. c) Evitar fricciones excesivas durante el paso del fluido de trabajo. Antes de pasar al estudio de los intercambiadores uno a uno, hace falta entender cómo es la dinámica interna de los Stirling, en cuanto a flujos energéticos y del fluido de trabajo. Como se verá, su comportamiento real se aleja de los ciclos empleados para explicar su funcionamiento. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 439 La búsqueda de un buen rendimiento energético exige que las temperaturas máxima y mínima entre las que trabaja el motor sean tan distantes como se pueda. Como generalmente la Tmín es la ambiente, se busca Tmáx tan alta como sea posible. Pero Tmáx tiene un límite, el dado por la resistencia de los materiales generalmente metales, que son buenos conductores térmicos. En consecuencia, la distribución de temperaturas de la mayoría de motores Stirling es muy parecida a la mostrada en la tabla 8.8, que corresponde a un motor calentado por gasoil. Tabla 8.8 Distribución de temperaturas en un motor Stirling calentado por gasoil Aire de entrada 280K Aire precalentado 1500K Productos de la combustión 2500K Humos antes del precalentador 1600K Humos a la salida 500K Gas de trabajo al salir del calentador 900K Gas de trabajo al salir del enfriador 330K Circuito de agua de refrigeración (T media) 295K a ) Flujo energético Mientras en un motor alternativo de combustión interna el flujo energético tiende a repartirse de modo que un tercio de la energía de la combustión pasa a ser trabajo útil, otro tercio se pierde por el escape y el último tercio se evacua por el sistema de refrigeración, en un motor Stirling de combustión la distribución es diferente. También es una tercera parte (32%) de la energía la que se convierte en trabajo, pero el escape sólo se lleva el 14% y la refrigeración, en cambio, el 46%. Se supone un 8% de pérdidas. En consecuencia, para iguales potencias, los motores Stirling necesitan un sistema de refrigeración de más capacidad que los de combustión interna. Este inconveniente está compensado por el hecho de que, si el motor está dotado de precalentador, los gases de escape salen a más baja temperatura. La figura 8.41 muestra el diagrama de flujo energético correspondiente a un motor Stirling de diseño muy cuidado (alto rendimiento), calentado por combustión y dotado de precalentador. De dicho diagrama debe destacarse el gran flujo calorífico que atraviesa el regenerador, que es más de tres veces el proporcionado por el combustible, lo que determina la dependencia de su viabilidad con la corrección del proceso de regeneración. © Los autores, 2002; © Edicions UPC, 2002. 440 Máquinas térmicas motoras Hu mos Pérdidas térmicas Pérdidas mecánicas Precalentador Refrigeració Enfriador Calentador Energ ía de combustión Regenerador Trabajo mecán ico Fig. 8.41 Flujo energético de un motor Stirling de alto rendimiento, calentado por combustión y dotado de precalentador. El flujo del regenerador no está a escala. b ) Flujo másico El fluido de trabajo es movido por el interior del motor gracias a los émbolos. Si éstos se desplazasen muy lentamente, siguiendo unas leyes de movimiento continuo en secuencia, las predicciones del ciclo ideal de Rallis se harían realidad, y el diseño de los elementos térmicos del motor sería relativamente sencillo. Pero la realidad no es ésta: las necesidades prácticas exigen altas velocidades (superiores a 1500 rpm) y movimientos aproximadamente senoidales. Las consecuencias que esto representa en el flujo másico son las siguientes: i. La mayoría de partículas del fluido de trabajo no realizan el recorrido completo del ciclo. De hecho, cuando las velocidades son muy elevadas, ninguna partícula completa este recorrido. ii. Existe flujo neto a través del conjunto calentador-regenerador-refrigerador en poco más de la mitad del tiempo del ciclo. El resto del tiempo el flujo está entrando o saliendo por los dos extremos a la vez. iii. Debido a la inercia y la fricción del fluido, el flujo neto a través de regenerador es mucho menor que el flujo que entra o sale de las cámaras de expansión y compresión. iv. El flujo por el interior de los intercambiadores de calor es altamente variable, tanto en presión, densidad y temperatura como en velocidad. Este hecho complica mucho el diseño de estos elementos. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 441 8.8.1 Calentadores El calentador de un motor Stirling tiene por misión transmitir calor desde un medio exterior caliente hacia el fluido de trabajo, a la vez que debe conducir este fluido en su recorrido por el interior del dispositivo. Siempre se sitúa a la salida de la cámara de expansión, a pesar de que, a menudo, la misma cámara forma parte del calentador. Los procesos de transferencia de calor que intervienen en el calentador son tres, y cada uno condiciona a su manera el diseño de este elemento: i Convección y radiación del medio exterior a la pared: en motores calentados por combustión, los humos calientes suelen ser lentos y poco densos, cosa que dificulta la transferencia de calor. Hace falta un elevado ∆T entre metal y humos, y una gran superficie de contacto. Este es el proceso crítico en el diseño de los calentadores. ii Conducción por el interior de la pared: para una buena conducción el calentador suele ser metálico, concretamente de algún acero resistente a la temperatura (con elevado contenido en níquel). A veces, se utilizan también injertos cerámicos en puntos especialmente calientes. El grosor de las paredes debe cumplir un equilibrio entre la buena conducción térmica y la resistencia a la fatiga en caliente (al ser la presión interna es oscilante). iii Convección de la pared hacia fluido de trabajo: Este fluido es denso, comprimido y se mueve a gran velocidad; esto facilita la transmisión de calor. Por lo tanto un pequeño ∆T será suficiente. Este proceso de transferencia no suele ser problemático. Estos tres puntos explican cómo será la distribución de temperaturas en el calentador de un motor Stirling: los productos de la combustión suelen estar a 2500 K, pasando a 1600 K al salir del calentador. Desde estas temperaturas existe un gran salto térmico hasta la temperatura media de la pared, que puede ser de 1000 K. La temperatura media del gas de trabajo no es mucho más baja: unos 900 K. aletas exterio res quemador cabecera tubo aletas interiores tubos aletas Fig. 8.42 Calentadores de motor Stirling para combustión. a) De aletas, b) Tubular de tipo capilar, c) Tubular de tipo cabecera. © Los autores, 2002; © Edicions UPC, 2002. 442 Máquinas térmicas motoras Según la localización del calentador, se ditinguen tres casos: i. El calentador es exclusivamente el mismo cilindro de expansión ii. El calentador comprende el cilindro de expansión y un calentador auxiliar iii. El calentador es exclusivamente un calentador auxiliar La primera opción sólo está presente en pequeños motores demostrativos, en los que el rendimiento no es importante; el cilindro ofrece poca superficie de contacto con el gas, hecho que dificulta mucho la transmisión de calor. La segunda opción, o mixta, es la más utilizada; en este caso el calentador auxiliar realiza el intercambio mayoritario de calor, mientras que el cilindro, también caliente, completa la transmisión. Es la solución que ofrece mejor rendimiento térmico. Por último, el tercer caso se utiliza cuando se quiere reducir el coste del acero empleado en el cilindro; el calentador auxiliar realiza todo el intercambio, mientras que el cilindro se mantiene refrigerado por agua. Su rendimiento térmico no es tan bueno. Centrándonos en los calentadores de los motores Stirling de combustión (los de radiación son diferentes), según la tipología constructiva de los calentadores auxiliares, pueden clasificarse en: a) Calentadores de aletas (Fig. 8.42a) b) Calentadores tubulares (Fig. 8.42b y 8.42c) Los calentadores de aletas son muy compactos y de fácil construcción, pero su rendimiento en la transmisión no es demasiado elevado. Por esta razón se utilizan en motores de menos de 1 kW. En motores más potentes el uso de calentadores tubulares es generalizado, aunque a menudo los tubos están dotados de aletas. El diseño de estos calentadores es complejo y su construcción también; son habituales los problemas de dilatación, de fatiga y también la presencia de puntos calientes. El contacto directo de la radiación o de los productos de la combustión sobre los tubos produce puntos calientes en el calentador. Por esta razón, y como margen de seguridad, la temperatura media del medio exterior debe ser 100ºC menor que el límite metalúrgico. Además, los humos suelen ensuciar y obstruir el calentador al cabo de un tiempo de funcionamiento. Una solución a estos problemas es el calentamiento indirecto mediante un circuito cerrado de metal líquido (generalmente una mezcla eutéctica de sodio y potasio). Tiene muchas ventajas: i. El metal líquido es buen conductor térmico, por lo tanto pueden reducirse las dimensiones del calentador; esto permite reducir el volumen muerto del motor y dar más potencia. ii. El metal líquido homogeneiza las temperaturas sobre el calentador; por lo tanto, no hace falta margen de seguridad, sino que la temperatura media del metal puede ser parecida al límite metalúrgico. Esto supone un ganancia en rendimiento térmico. iii. El circuito de metal líquido puede absorber calor de diversas fuentes, cosa que da al motor una gran polivalencia (energía solar de día y quemador de gas de noche, p.e.) El precalentador de aire es un elemento sólo utilizado en motores alimentados por combustión. A pesar de que su presencia no es obligada ni tiene nada que ver con el propio motor Stirling, resulta muy deseable de cara a mejorar el rendimiento de la combustión. Su misión es evitar una pérdida excesiva de calor a © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 443 través de los humos; por lo tanto, recupera parte de este calor calentando el aire que entra hacia la cámara de combustión. El resultado es un aumento de la temperatura media en el calentador del motor Stirling (más rendimiento térmico del motor) y un mejor aprovechamiento del combustible. Los precalentadores pueden ser de dos tipos: a) Recuperativos: Transfieren el calor a través de la pared que separa los dos fluidos. Pueden ser tubulares o de pared en acordeón. Consiguen ser muy efectivos en la transferencia, pero están limitados por el espacio disponible, el peso máximo, y el precio. Las partículas del humo suelen ensuciarlos mucho. b) Regenerativos: Por la transferencia, los humos y el aire atraviesan alternativamente una matriz regenerativa. La construcción más práctica es la rueda térmica: en la qué la matriz tiene forma de volante que gira lentamente dentro de un tubo, según el eje de éste. El tubo está dividido longitudinalmente y permite el paso simultáneo de los humos en un sentido y del aire en sentido contrario, sin que es mezclen. El paso alternativo de cada punto de la matriz a través de los dos flujos, permite el efecto regenerativo. Como que los sentidos son contrarios, la matriz se autolimpia. Se utilizan mucho en turbinas de gas, y pueden ser de materiales metálicos, pero mejor si son cerámicos. 8.8.2 Refrigeradores El refrigerador de un motor Stirling tiene como objetivo evacuar calor del fluido de trabajo hacia un medio exterior más frío, a la vez que ha de conducir este fluido en su recorrido por el interior del dispositivo. El refrigerador está formado por la propia cámara de compresión y a menudo también por un intercambiador auxiliar a la salida de ésta. A pesar de ser un elemento de bajo coste y de diseño relativamente sencillo, el refrigerador es tan importante como el calentador en los motores Stirling, sobre todo si es tiene en cuenta que debe evacuar casi el 50% de la energía que el motor recibe, y que lo debe hacer a la menor temperatura posible. Cuanto más baja sea su temperatura, mejor rendimiento térmico se obtendrá, y menos se deteriorarán las juntas y gomas del motor. Los procesos de transferencia de calor del refrigerador son los mismos que los del calentador. La convección del fluido de trabajo con la pared metálica es un proceso fácil debido a las características de velocidad y densidad de este fluido. La conducción por el interior del metal tampoco representa ningún problema, ya que la temperatura baja permite que los grosores de pared sean menores que los del calentador, para soportar las mismas presiones. Por último, la convección hacia el medio exterior, si se refrigera con agua, presenta también una transferencia de calor muy buena. La refrigeración con aire requiere más salto térmico. El proceso crítico en el diseño suele ser el primero de los tres. Mientras que la temperatura del medio exterior suele ser la atmosférica, el fluido de trabajo sale del refrigerador unos 50ºC más caliente; se trata de un ∆T muy pequeño por la cantidad de calor que se transmite, hecho que se debe a la facilidad de la transmisión. © Los autores, 2002; © Edicions UPC, 2002. 444 Máquinas térmicas motoras El cilindro de compresión y el refrigerador auxiliar, anexo a éste, forman el conjunto del refrigerador y su forma depende del tipo de refrigeración que se haga: a) Refrigeración por agua: si se dispone de una fuente inagotable de agua a temperatura ambiente (río, lago, red pública...), sólo hace falta bombearla por el interior del refrigerador. Es la solución más eficiente, pero sólo es utilizable en motores estacionarios. b) Refrigeración por aire: en la mayoría de casos la refrigeración por agua continua no es posible, sea por la no-estacionalidad del motor, sea por la ausencia de una fuente viable. Entonces hace falta transmitir el calor al aire, y esto es puede hacer de dos maneras: - Convección directa con el aire mediante aletas metálicas: La convección puede ser natural o forzada. Es una transmisión poco eficiente y sólo se utiliza en pequeños motores demostrativos o bien en motores lentos y no presurizados que hayan de funcionar desasistidos durante largos periodos. - Circuito de agua con radiador: Es la solución más utilizada, debido a su eficiencia de transmisión y a la libertad de movimiento que da al motor. Sólo presenta el inconveniente de consumir energía para bombear el agua e impulsar el aire. 8.9 Fluidos de trabajo Todos los motores Stirling realizados durante el siglo XIX funcionaban con aire a presión atmosférica como fluido de trabajo, de donde les venía el nombre de máquinas de aire caliente. Eran máquinas grandes, lentas y de bajo rendimiento, pero seguras respecto al vapor. Ya entrado el siglo XX, la casa Phillips comienza a utilizar aire presurizado para obtener más potencia, y en 1954 incorpora nuevos gases como el hidrógeno y helio para los motores, después de comprobar su éxito en los refrigeradores. Desde entonces, Hidrógeno y Helio se han consolidado como los fluidos de trabajo más utilizados en motores Stirling. El aire, el argón y otros fluidos sólo se encuentran, actualmente, en pequeños motores demostrativos o experimentales.Pero las posibilidades no acaban aquí. Son numerosas las investigaciones alrededor de nuevos fluidos de trabajo para el futuro. La tabla 8.9 enumera de forma exhaustiva los tipos de fluidos que pueden ser utilizados en los motores Stirling. Algunos de ellos ya se han experimentado, pero otros sólo son teóricos. 8.9.1 Fluidos de trabajo gaseosos Los fluidos de trabajo en fase gaseosa, formados por uno o más componentes químicamente no reactivos, son sin ninguna duda los más estudiados y empleados en los motores Stirling. El hidrógeno, el helio y el aire son los que ofrecen más ventajas, y por lo tanto los de máxima utilización. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 445 Tabla 8.9 Posibles fluidos de trabajo para motores Srirling monocomponente Mono-fase Multi-fase multi- Mono-fase componente multi-fase gas H, He, Ar, CO2, H2O(v), ... líquido H2O, Hg, aceites, alcoholes, CO 2 (l), gasolina, ... fluido condensante H 2O(l) + H2O(v), ... mezcla de gases Aire, ... líquido multicomponent H2 O + solutos, mezclas, ... [gas portador] + gas disociante 1RHVWXGLDGRV gas portador + fluido condensante Aire + H2O(l) + H 2O(v), ... [gas portador] + fluido [Helio] + N 2O4 (l)] N2O4 (v) ] NO condensante] NO ] O2 , ... disociante Meijer presentó el año 1970 un estudio numérico basado en el programa de simulación de la casa Phillips. Comparó hidrógeno, helio y aire en unas condiciones prefijadas: Tmáx = 700ºC, Tmín = 25ºC, y Pmáx = 110kg/ cm2 y obtuvo el gráfico de la figura 8.43. Con el rendimiento global del motor en las ordenadas y la potencia específica (kW / litros de volumen barrido) en las abcisas, a cada gas le corresponde una curva formada por los puntos obtenidos a diferentes velocidades. Del gráfico de Meijer se deduce: 1. Al aumentar la velocidad, el rendimiento disminuye casi de forma lineal hasta unas rpm límite en las que cae en picado. El aire llega a este límite antes que el helio y éste antes que el hidrógeno. Para iguales velocidades se tiene: η(aire) < η(helio) < η(hidrógeno). La diferencia aumenta cuanto mayor es la velocidad. 2. Al aumentar la velocidad, la potencia específica (Pesp) aumenta casi linealmente hasta un límite, que depende de cada gas y que no se puede superar por mucho que se aumente la velocidad. El aire © Los autores, 2002; © Edicions UPC, 2002. 446 Máquinas térmicas motoras tiene un límite de potencia específica menor, mientras que el hidrógeno lo tiene más grande. Para idénticas velocidades se tiene: Pesp (aire) < Pesp (helio) < Pesp (hidrógeno), es decir, el hidrógeno es el gas que menos volumen necesita para ofrecer la misma potencia (motor más compacto y ligero). Rendimiento global (%) 3. Como consecuencia de las relaciones anteriores, un aumento de potencia específica supone una disminución de rendimiento para cualquiera de los gases. o o Potencia específica Pesp (kW/litro de cilindrada) Fig. 8.43 Comparación teórica de Meijer (1970) entre hidrógeno, helio y aire La variación de las condiciones de presión y temperatura modifica las curvas: 1. Un aumento de Tmáx provoca un ascenso de toda la curva en rendimiento. 2. Un aumento de Pmáx hace más plana la curva, es decir, aumenta los rendimientos a altas potencias específicas, pero los deja igual a potencias menores. En el año 1976 Michels planteó el mismo estudio utilizando Tmáx y Tmín constantes, pero cogiendo la Pmáx que diese el mejor rendimiento en cada caso. Comparó nitrógeno, helio y hidrógeno mediante las mismas curvas utilizadas por Meijer, las cuales, ahora, cogían una forma más arqueada con un máximo central. A parte de las conclusiones ya establecidas por Meijer, Michels dedujo que el rendimiento máximo alcanzable entre dos temperaturas Tmáx y Tmín no depende del fluido de trabajo; ahora bien, el hidrógeno obtuvo este máximo a una potencia específica más grande que el helio y, sobre todo, que el nitrógeno. El comportamiento del nitrógeno es extrapolable al aire. Ha habido otros estudios comparativos, como el de Hall (análisis de flujo estacionario) que clasifica los gases en buenos (hidrógeno), medianos (helio y vapor de agua) y malos (aire y anhídrido carbónico). También se han hecho estudios experimentales, pero todos llegan a conclusiones parecidas. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 447 Ahora se va a realizar el mismo estudio comparativo con 4 de los gases más representativos de los motores Stirling. a ) Ciclo Stirling Utilizando las fórmulas definidas anteriormente se puede realizar unas gráficas que muestren la evolución del rendimiento y del trabajo en función de la relación de compresión para los diferentes gases, tanto si el ciclo es el isotérmico como el adiabático. Estas son las figuras 8.44 y 8.45. Rendimiento (%) Observando las dos gráficas se puede ver claramente que los fluidos con mayor rendimiento son el helio y el argón cuando el ciclo sigue isotermas por el contrario, cuando sigue curvas adiabáticas el rendimiento de estos dos gases es inferior al del hidrogeno o al del aire para relaciones de compresión superiores aproximadamente a 1,75. Se tiene que tener en cuenta que estos valores son para un caso en concreto de cilindrada y otras condiciones, pero que los valores son extrapolables a otros casos. Relación de compresión Fig. 8.44 Rendimiento para los diferentes gases en el ciclo Stirling isotérmico y adiabático en función de la relación de compresión Analizando las curvas de el trabajo, se observa que los cuatro fluidos responden igual en el caso del ciclo isotérmico, como ya se explicó en el análisis de los ciclos ideales, y que para el ciclo adiabático los fluido que desarrollan más trabajo son el hidrógeno y el aire. Por lo tanto, cuando se escoja un fluido entre estos para llevar a término un ciclo Stirling, este se escogerá dependiendo de la relación de compresión que se quiera usar y de la característica mayoritaria que se quiera valorar. © Los autores, 2002; © Edicions UPC, 2002. Máquinas térmicas motoras Trabajo (J) 448 Relación de compresión Fig. 8.45 Trabajo para los diferentes gases en ciclo Stirling isotérmico y adiabático en función de la relación de compresión b ) Ciclo Rallis Siguiendo el mismo esquema que se ha realizado en el caso del Stirling, ahora se exponen las mismas gráficas para el ciclo Rallis, con los mismos fluidos. 45,00 40,00 Rendimiento (%) 35,00 30,00 hidrogen heli 25,00 argó aire hidrogen (ADIAB) heli (ADIAB) 20,00 argó (ADIAB) aire (ADIAB) 15,00 10,00 5,00 0,00 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5 Relación de compresión Fig. 8.46 Rendimiento para los diferentes gases en el ciclo Rallis isotérmico y adiabático en función de la relación de compresión © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 449 Al igual que en el ciclo Stirling, los gases que ofrecen un mayor rendimiento son el argón y el helio cuando el ciclo sigue curvas isotérmicas y cuando sigue adiabáticas se invierte y pasan a ser el hidrógeno y el aire los que presentan un mayor rendimiento. La diferencia está en que ahora la relación de compresión, 2,25, para la cual el rendimiento según adiabáticas es semejante para todos los gases, es más alta que la del ciclo Stirling, 1,75. En cuanto al trabajo, se vuelve a observar que este no depende del gas cuando se sigue un proceso de curvas isotérmicas. Pero cuando se sigue curvas adiabáticas, en general, los mayores trabajos se obtienen con el aire y con el hidrógeno, siendo el del hidrógeno un poco superior. 100,00 90,00 80,00 70,00 hidrogen heli Trabajo (J) 60,00 argó aire 50,00 hidrogen (ADIAB) heli (ADIAB) argó (ADIAB) aire (ADIAB) 40,00 30,00 20,00 10,00 0,00 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5 Relación de compresión Fig. 8.47 Trabajo para los diferentes gases en ciclo Rallis isotérmico y adiabático en función de la relación de compresión En este ciclo se ve claro que trabajando con relaciones de compresión de 2,25 o 2,5, y siguiendo un criterio de compromiso entre trabajo y rendimiento, seguramente los mejores gases serían el hidrógeno, el aire o el helio, mientras que el argón ya quedaría, comparándolo directamente con el helio, fuera de posibilidades, pues tiene más o menos el mismo rendimiento que el helio, pero mucho menos trabajo. Como pasaba también en el ciclo Stirling, cuando se escoge uno de los gases se tiene que tener en cuenta la relación de compresión a la que se va a trabajar y según el criterio que se quiera optimizar se utilizaría un gas o otro. Estos criterios pueden ser, además del de máximo trabajo o de máximo rendimiento, otros como, el económico o el de seguridad. c ) Ciclo mixto Stirling-Rallis Operando como en los otros casos, se muestran directamente la gráficas de rendimiento y de trabajo para los cuatro gases en el ciclo isotérmico y en el adiabático. © Los autores, 2002; © Edicions UPC, 2002. 450 Máquinas térmicas motoras En este ciclo, cuando se observa la respuesta en cuanto al rendimiento, se comprueba más o menos la misma superioridad de rendimiento del argón y del helio en ciclo isotérmico, pero no en adiabático. Para este último, la franja para la cual los cuatro son iguales y obtienen mayor rendimiento está entre 1,75 y 2,5. Por tanto, en está franja los cuatro gases dan aproximadamente el mismo rendimiento, siendo el helio y el argón más desfavorables para relaciones de compresión superiores. 45 40 35 Rendimiento (%) 30 hidrogen heli argó aire hidrogen (ADIAB) heli (ADIAB) argó (ADIAB) aire (ADIAB) 25 20 15 10 5 0 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5 Relación de compresión Trabajo (J) Fig. 8.48 Rendimiento para los diferentes gases en el ciclo Mixto Stirling-Rallis isotérmico y adiabático en función de la relación de compresión Relación de compresión Fig. 8.49 Trabajo para los diferentes gases en ciclo Mixto Stirling-Rallis isotérmico y adiabático en función de la relación de compresión © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 451 En cuanto al trabajo, en el ciclo isotérmico la respuesta ya no es igual para todos los gases, aunque no muy distante, excepto el argón, que se desmarca definitivamente por debajo, y por tanto quedando descartado. En el ciclo, ocurre un efecto similar al ver que el helio y el argón ofrecen menor trabajo que el hidrógeno y el aire. Tal como en los otros ciclos, se debe escoger un gas teniendo en cuenta la relación de compresión y los otros parámetros externos anteriormente citados. De los cuatro fluidos en estudio, no todos responden de igual manera a las diferentes condiciones de trabajo. En primer lugar hace falta considerar el comportamiento termodinámico parecido del helio y del argón por un lado y del aire y del hidrógeno por el otro. Este hecho se debe a unas capacidades caloríficas específicas parecidas en cada pareja. Un aspecto básico cuando se quiere seleccionar un fluido determinado, es la relación de compresión a la que se pretende trabajar. A nivel de rendimiento, los dos fluidos más adecuados son el helio y el argón, dado que presentan un rendimiento según isotermas superior al del aire y al del hidrógeno y un rendimiento adiabático similar cuando la relación de compresión está entre 2 y 2,5. Respecto el trabajo, los fluidos que generan más trabajo por ciclo son el aire y el hidrógeno, porque para transformaciones isotermas todos los fluidos generan prácticamente el mismo trabajo, pero para transformaciones adiabáticas el hidrógeno y el aire no pierden tanto trabajo. Por tanto, para decidir cuál es el fluido más adecuado se tienen que valorar otros parámetros a parte del rendimiento y el trabajo. 8.9.2 Fluidos de trabajo líquidos Los líquidos, como fluidos que son, pueden comprimirse, a pesar de que requieren grandes presiones para hacerlo y sus variaciones de volumen son pequeñas en comparación con los gases. John Malone, en 1931 demostró con dos prototipos que era posible utilizar líquidos como fluido de trabajo de un motor Stirling. Obtuvo un rendimiento del 27% girando a 250 rpm. en un motor con los pistones llenos de agua. La presión oscilaba entre los 207 y los 82 MPa, siempre por encima del punto crítico, y la temperatura máxima se encontraba alrededor de la crítica, de manera que el líquido se comportaba como un gas de alta densidad. Las ventajas del uso de fluidos de trabajo líquidos, frente a los gaseosos son: a) Transmisión de calor favorecida por la elevada conductividad térmica de los líquidos y por su gran capacidad calorífica. b) La estanqueidad con líquidos puede resolverse de mejor manera. c) El líquido sirve de lubricante en el movimiento de los émbolos. d) El sistema se autopresuriza, ya que en frío puede llenarse a presión atmosférica, pero cuando se calienta la presión aumenta rápidamente. © Los autores, 2002; © Edicions UPC, 2002. 452 Máquinas térmicas motoras Pero el uso de los líquidos impone unas restricciones sobre los motores Stirling: a) Las elevadas presiones exigen paredes gruesas, que hacen el motor más pesado. b) Para evitar las pérdidas térmicas a lo largo de estas paredes, es necesario hacer los cilindros y los pistones muy largos y de poco diámetro. c) La densidad y la inercia de los líquidos no permiten funcionar a velocidades elevadas. Se han realizado pruebas con otros líquidos: mercurio, aceite, gasolina, alcoholes, anhídrido carbónico líquido, dióxido de azufre, etc, pero siempre el agua ha dado mejores resultados. Quedan por estudiar los efectos de posibles solutos en los líquidos o las mezclas de éstos. 8.9.3 Fluidos de trabajo con cambio de fase El fluido que recorre el ciclo de trabajo de un Stirling puede ser tal que al pasar de la cámara de expansión a la de compresión condense, y en el sentido inverso se evapore. De hecho, el caso más general es cuando el fluido de trabajo está compuesto por un gas, llamado portador, el cual arrastra una cierta proporción de un fluido con cambio de fase. La relación β entre la masa de este fluido y la masa de gas portador puede variar desde 0 (gas portador puro) hasta 4 (fluido condensante puro). Se han probado diversas mezclas de fluidos portadores y condensantes, pero, de momento, la que ofrece más ventajas es aire con vapor de agua. De todas maneras, seguro que existen otras combinaciones que ofrecen rendimientos más elevados utilizando como gas portador el helio o el hidrógeno, por ejemplo.La mezcla de aire y agua es la combinación más estudiada. Walker y Agbi, en 1974, la utilizaron con el análisis isotérmico de Schmidt para comprobar los efectos del factor β sobre los principales parámetros del motor Stirling. Con unas hipótesis muy simplificativas, una relación β homogénea en todo el volumen, llegaron a las siguientes conclusiones: a) En la compresión y el calentamiento, la evaporación del agua supone un incremento del número de moles en fase de gas, hecho que provoca una subida adicional de la presión máxima del ciclo. El área del ciclo crece: se obtiene más potencia. b) La ebullición y la condensación aumentan la capacidad calorífica del fluido de trabajo, por lo tanto, la transferencia de calor mejora y se hace más próxima a la isotermalidad. Este hecho también contribuye al aumento del trabajo termodinámico. c) El efecto de β sobre la potencia no es siempre el mismo. Si β continua creciendo, la potencia pasa por un máximo y vuelve a bajar. Además, este efecto positivo de presencia de fluido condensante sólo se manifiesta cuando la temperatura del calentador Tmáx es moderada. Para temperaturas elevadas, el crecimiento de β es perjudicial, como muestra la figura 8.47. d) El aumento de β reduce el efecto de las variaciones de Tmáx y del Vmuerto sobre la potencia del motor. Esto confiere mayor facilidad para el control y más libertad de diseño de los intercambiadores de calor, respectivamente. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 453 e) El fluido de trabajo tiende a acumularse más en la cámara de compresión que en la de expansión, cosa que obliga a construir más pequeña la primera que la segunda, para compensar el efecto y mantener el nivel de potencia. El incremento de masa en la cámara de compresión, provoca que los flujos sean más rápidos y, por lo tanto, se produzcan más pérdidas por fricción. La experimentación ha permitido determinar las siguientes ventajas y inconvenientes de los fluidos de trabajo compuestos en motores Stirling: Relación de potencias a) La presencia de líquido en las paredes del cilindro facilita la estanqueidad y actúa como lubricante, alargando la vida de los obturadores. Relación de masas Fig. 8.50 Efecto de la relación de masas β sobre la potencia del motor. Influencia de T máx b) El líquido tiende a acumularse en la cámara de compresión, quedando fuera del ciclo y reduciendo la β. Hace falta diseñar el motor de manera que el líquido caiga por gravedad hacia regenerador, para que así recircule. Si β= 4, es decir, en ausencia del gas portador, el problema de la no homogeneidad desaparece. El agua y el vapor no son los mejores candidatos para esta opción, pero existen otros fluidos que pueden ser autoportantes como los fluidos de trabajo con cambio de fase. A la vista de los efectos del fluido de trabajo compuesto sobre el comportamiento de los motores, se pueden intuir sus posibles aplicaciones. En motores de automoción permite reducir la Pmáx (que se traduce en una reducción de peso) sin pérdida de potencia. También puede ser útil en motores Stirling de bajo ∆T (salto térmico), tanto motores como refrigeradores no criogénicos. © Los autores, 2002; © Edicions UPC, 2002. 454 Máquinas térmicas motoras 8.9.4 Fluidos de trabajo químicamente reactivos Para conseguir el mismo efecto de absorción de calor y de aumento del número de moles del gas que se producía con el cambio de fase, se podría pensar también en un fluido químicamente reactivo, el cual, por efecto de la temperatura, se disocie mediante una reacción química reversible y endotérmica. Esta posibilidad puede realizarse de diversas maneras: con o sin presencia de gas portador, y con o sin cambio de fase. La existencia de gas portador añade el parámetro β (relación entre la masa del reactivo y la del portador) en los cálculos. La existencia de cambio de fase refuerza el efecto positivo de la disociación del fluido. Los reactivos idóneos para este funcionamiento deben cumplir tres condiciones: que las reacciones sean muy rápidas (para alcanzar elevadas rpm) que sean muy endotérmicas (por aumentar la capacidad calorífica aparente), y que sea una reacción muy estudiada (para poder prever los efectos). El fluido que más llama la atención es el tetraóxido de nitrógeno, que se comporta como condensantedisociante y que requiere un gas inerte como portador. Su reacción es: N2O4 (líquido) + N2O4 (qas) ---> 2 NO2 (qas) + 2 NO + O2 (0 moles de gas) (1 mol de gas) (2 moles de gas) (3 moles de gas) Walker y Metwally (1977) estudiaron esta reacción calculando el efecto del parámetro β sobre el comportamiento del motor Stirling. Emplearon el análisis isotérmico de Schmidt con las mismas condiciones de contorno que las utilizadas en el apartado anterior para el fluido aire + agua. Los resultados a que llegaron fueron prácticamente los mismos, es decir, el efecto de β sobre la potencia y sobre los otros parámetros es coincidente y, por lo tanto, las posibles aplicaciones son las mismas. 8.10 Características de funcionamiento 8.10.1 Curvas características Una primera aproximación del valor de la potencia que puede desarrollar un motor Stirling viene dada por la fórmula de Beale. Las constantes dadas en la tabla 8.10 son una media a partir de muchos motores reales. P = B · pm · f · V (8.68) donde: P: Potencia del motor (W) B: Número de Beale (ver tabla 6.1) Pm: Presión media del ciclo (bar) F: Frecuencia de funcionamiento (Hz) V: Volumen barrido por el pistón de potencia (cm3) © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 455 Tabla 8.10 Número de Beale según la temperatura del calentador Temperatura del 600 K 800 K 1000 K 1200 K 0'008 0'017 0'025 0'030 0'002 0'006 0'009 0'010 calentador NºBeale (motor bien diseñado) NºBeale(motor poco optimizado) Esta relación es útil para cálculos preliminares y estudios de viabilidad. También es interesante conocer entre que niveles se mueve el rendimiento de los motores Stirling reales: la mayoría se encuentran entre los dos valores siguientes: ηSTIRLING = (04÷05)· ηCARNOT = (04÷05)· (1 - Tmín / Tmáx) (8.69) Es decir, una máquina Stirling bien diseñada y ajustada, que trabajase entre Tmáx= 600ºC (límite metalúrgico habitual) y Tmín= 20ºC (temperatura del agua corriente), obtendría hasta un 33% de rendimiento. De todas maneras, los primeros prototipos de cualquier modelo, todavía no optimizados, suelen proporcionar rendimientos alrededor de la mitad de este valor. La utilidad de un motor térmico es convertir energía calorífica en trabajo mecánico. Por eso, conocer sus prestaciones significa saber cuánta energía consume y cuánto trabajo genera por unidad de tiempo, o lo que es lo mismo: conocer la potencia mecánica (P) y el rendimiento (η). Las prestaciones P y η del motor Stirling están en función de las condiciones de trabajo que se le imponen. Son las variables de funcionamiento. a) Velocidad (n): Incremento de la velocidad, entendida como la frecuencia de repetición del ciclo; tendrían que provocar incrementos proporcionales en la potencia; esto es cierto a bajas revoluciones, pero, a alta velocidad, las pérdidas aumentan y P comienza a caer. El rendimiento, por su lado, no tendría que verse afectado por la velocidad, pero también las pérdidas del motor hacen que la curva de η presente forma convexa. Hay una n de Pmáx y una de η máximo, entre las cuales es conveniente trabajar (n[ηmáx] > n[Pmáx]). b) Presión media (pmed) o presión máxima (Pmáx): El efecto de la presión del fluido de trabajo sobre la potencia y el rendimiento es casi el mismo que el de la velocidad. Idealmente p tendría que ser proporcional a la presión, y η independiente; pero las pérdidas provocadas por el aumento de p modifican estas relaciones tal y como lo hace la velocidad. Habrá una p de Pmáx y una de ηmáx, entre las cuales es conveniente trabajar (p[ηmáx] > p[Pmáx]). c) Temperatura del calentador (Tmáx): Es evidente que cuanto más alta sea la temperatura más intercambio térmico habrá, y por lo tanto, se generará más potencia. También está claro que el © Los autores, 2002; © Edicions UPC, 2002. 456 Máquinas térmicas motoras aumento de temperatura eleva el rendimiento ideal de Carnot, y en consecuencia el η real del motor crece. d) Temperatura del refrigerador (Tmín): Por la misma razón, un incremento de la temperatura del refrigerador provoca una disminución tanto de la potencia como del rendimiento. La figura 8.51 explica gráficamente cada uno de los puntos anteriores. El efecto de todos estos parámetros y también de los que vienen a continuación se han analizado manteniendo todos los demás constantes. Las prestaciones P y η del motor Stirling están también en función de los parámetros que definen la configuración del motor. Son las variables de diseño: a) Cilindrada: En los motores Stirling se puede llamar cilindrada a la diferencia entre los volúmenes máximo y mínimo a que se somete todo el fluido de trabajo en cada ciclo. La relación de la cilindrada con la potencia desarrollada es lineal (pero no proporcional). El rendimiento en cambio no se tendría que ver afectado por este parámetro, pero la experiencia demuestra que los pequeños motores demostrativos no dan tan buenos resultados como sus homólogos más grandes. Tmax y Tmin constantes Velocidad, n Tmax y Tmin constantes Presión media, ¯p Tempe ratua de calentamiento Temperatua de refrigeración Fig. 8.51 Influencia de los principales parámetros de funcionamiento sobre las prestaciones del motor (potencia y rendimiento). a) Efecto de la velocidad a diferentes niveles de presión media, b) Efecto de la presión media del fluido de trabajo a diversas velocidades, c) Efecto de la temperatura del calentador a diversas velocidades o presiones medias, d) Efecto de la temperatura del refrigerador a diversas velocidades o presiones medias © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 457 b) Relación de volúmenes barridos (k): Es la relación entre el volumen barrido por el émbolo de compresión y el barrido por el de expansión. La potencia presenta un máximo para valores de k entre 0,8 y 1, en función de otros parámetros. c) Relación carrera / diámetro (s/D): Suele encontrarse alrededor de 0,5 tanto para la cámara de expansión como para la de compresión. Se trata de una constitución supercuadrada que favorece el intercambio térmico y reduce las dimensiones de un posible cigüeñal y del motor en general, a pesar de que dificulta el diseño. d) Relación de volumen muerto (X): es la relación entre el volumen muerto (no barrido) y el volumen de la cámara de expansión. El aumento del espacio interior del regenerador y los intercambiadores auxiliares (aumento de X) afecta negativamente a la potencia. Hace falta diseñar con un factor X tan bajo como sea posible. e) Ángulo de desfase (α): el movimiento de los dos émbolos de un motor Stirling suele ser senoidal, con la misma frecuencia, pero con un cierto desfase α. La potencia presenta un máximo para valores de α entre 60º y 120º, según el motor. La figura 8.51 muestra algunos de estos efectos sobre la potencia, en forma de gráficos univariantes. Estos son insuficientes cuando se quiere un diseño un poco más fino. Debido a esto, existen unas cartas de diseño que permiten trabajar con diversas variables a la vez. De todas maneras, un desarrollo riguroso exige un estudio personalizado de cada motor con la ayuda de herramientas informáticas. Fig. 8.51 Influencia de algunos parámetros de diseño sobre la potencia del motor, a una velocidad y una presión determinada, y a dos niveles de τ (relación de temperaturas = Tmín /Tmáx ) τ =025 y τ=05. a) Efecto del factor de volumen barrido (k=Vcompr /Vexpan ). El valor óptimo de k depende de la temperatura, b) Efecto de la relación de vol. muerto (X=Vmuerto /Vexpan ), c) Efecto de la ángulo de desfase α. La mayoría de motores térmicos transmiten la potencia mecánica a través de un eje rotativo. Por esto el valor del par de salida tiene un gran interés. Comparando motores alternativos de combustión interna con motores Stirling de idéntica potencia, se observa que el par desarrollado por estos últimos es bastante superior. Esto es debido a que la velocidad no suele superar las 2500 rpm en los Stirling, mientras que los MACI pueden llegar fácilmente a las 5000 rpm. © Los autores, 2002; © Edicions UPC, 2002. 458 Máquinas térmicas motoras A pesar de generar pares superiores, los motores Stirling no requieren una mecánica tan robusta como los motores alternativos de combustión interna. ya que su par es muy constante dentro de cada ciclo (con 4 cilindros: 5% de variación del par medio en un Stirling, mientras que en uno de gasolina es del 200%). Esta ausencia de brusquedades en los esfuerzos mecánicos evita la fatiga de los materiales y hace el motor silencioso, del mismo modo que hace prácticamente innecesaria la presencia de volante de inercia. La representación del par -juntamente con el rendimiento- en función de la velocidad de giro y de la presión del fluido, configura las curvas características, que definen muy claramente el comportamiento del motor. La figura 8.52 muestra un ejemplo. Uno de los atractivos del motor Stirling es su buen comportamiento a cargas parciales, es decir, cuando funciona a velocidades o presiones más bajas que las de máxima potencia. Esta característica se hace patente con: Pares muy constantes en un amplio rango de velocidades o presiones; es una característica muy valorada en automoción. ii. El balance térmico y el rendimiento varían poco en un rango bastante amplio de velocidades y presiones. Par T (N*m) i. Velocidad del motor, n (r.p.m.) Fig. 8.52 Curvas características calculadas por un motor Phillips de 4 cilindros con transmisión rómbica, para automoción © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 459 Como se ha podido observar, los niveles de potencia y rendimiento -en función de la velocidad o de la presión del motor- están lejos de aquello que se puede deducir de los ciclos termodinámicos ideales. Es decir, ni la potencia es directamente proporcional a n o p, ni el rendimiento es constante respecto n o p. Esta desviación en el comportamiento se debe a la existencia de unas pérdidas que son imposibles de evitar en los motores actuales. La tabla 8.11 enumera estas pérdidas y determina como afectan a P y η, en función de n y p (efecto constante, progresivo, regresivo, etc.). La figura 8.51 muestra estos efectos de forma gráfica. Rendimiento Potencia Velocidad o Presión Velocidad o Presión Fig. 8.51 Efecto de las pérdidas sobre la potencia y el rendimiento del motor, en función de la presión media del fluido o de la velocidad. 1- Efecto del volumen muerto, 2- Pérdida por redistribución del fluido de trabajo, 3Efecto de la adiabaticidad, 4- Pérdidas térmicas por conducción, convección, radiación y efecto lanzadora, 5Pérdidas térmicas a través de los humos, por potencial térmico y por regeneración imperfecta, 6- Pérdidas por fricción mecánica, 7- Pérdidas por fricción aerodinámica, 8- Pérdidas de los dispositivos auxiliares. A diferencia de los motores de combustión interna, los Stirling necesitan un período de calentamiento, al final del cual ya pueden ser arrancados. A pesar de que hay sistemas para reducir este tiempo, nunca la puesta en marcha será instantánea. Este hecho representa un importante freno para su utilización en vehículos de tipo turismo y en grupos electrógenos de respuesta rápida. Una vez calentados, sólo los motores Stirling de pistón libre se ponen a funcionar espontáneamente; los demás necesitan el impulso inicial de un motor de arranque. Actualmente, los sistemas electrónicos de control se encargan de la puesta en marcha mediante un proceso programado. Cuando se desea un cambio de la potencia generada por el motor, se puede aumentar o reducir el caudal del combustible aportado, pero esto genera un cambio lento, debido a la inercia térmica de los Stirling. Se hacen necesarios otros sistemas que permitan variaciones rápidas de potencia y velocidad. Estos procedimientos existen. © Los autores, 2002; © Edicions UPC, 2002. 460 Máquinas térmicas motoras 8.10.2 Contaminación y ruido Tabla 8.11 Causa de las principales pérdidas de potencia y rendimiento en motores Stirling. Caracterización de los efectos en función de la velocidad o la presión en el medio ambiente 7,32'( 3e5','$ 3e5','$ 9ROXPHQPXHUWR: reduce la amplitud de la excursión de la presión del ciclo ()(&72 ()(&72 62%5((/ 62%5(/$ 327(1&,$ 5(1',0,(172 Proporcional Nulo Proporcional Nulo Proporcional Constante Constante Regresivo Proporcional Constante 5HGLVWULEXFLyQGHOIOXLGR: el Pérdidas del ciclo modificado movimiento continuo (senoidal) de los pistones y las inercias del fluido hacen que la distribución ya no sea la ideal. $GLDEDWLFLGDG: La elevada velocidad con la que se repite el ciclo no permite intercambios de calor isotérmicos. &RQGXFFLyQ: a través y a lo largo de las paredes. &RQYHFFLyQ\UDGLDFLyQ: hacia el Pérdidas ambiente. térmicas (IHFWRODQ]DGRUD": los émbolos en movimiento absorben calor por el extremo caliente de los cilindros y la pierden por el extremo frío. +XPRV: cuando la fuente de calor es por combustión, parte de la energía se pierde por el escape. 3RWHQFLDOWpUPLFR: debido a la diferencia de temperatura entre extremos de los intercambiadores © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 461 El motor Stirling, como ciclo cerrado que es, no genera por él mismo ningún efecto contaminante en su funcionamiento. Ni las pequeñas fugas de fluido de trabajo (hidrógeno, helio o aire, principalmente), ni las renovaciones de aceite lubricante -si se tratan de forma correcta-, no se pueden considerar nocivos para salud. La principal emisión contaminante de los motores Stirling proviene de su fuente de calor, especialmente si ésta se basa en una combustión. Las buenas condiciones en que se desarrolla esta combustión (continuidad y elevadas temperaturas) hacen que los niveles de hidrocarburos no quemados (HC) y de monóxido de carbono (CO) sean extraordinariamente bajos, mientras que el nivel de óxidos de nitrógeno (NOX) se incrementa notablemente respecto los motores de combustión interna. Esto sucede sobre todo cuando los combustibles utilizados son fueloils, gasóleos o gasolinas. Una solución frecuentemente utilizada es la recirculación de una tercera parte de los humos, que consigue reducir hasta un 30% los niveles de NOX. Pero gracias a la libertad que tienen los motores Stirling a la hora de escoger una fuente de calor, se pueden usar recursos mucho menos contaminantes, como la radiación solar, la combustión de gas natural o de biomasa, o bien, el aprovechamiento del calor residual de otros procesos (cogeneración). Esto permite decir que el motor Stirling puede ser más limpio que los motores alternativos de combustión interna. Los motores Stirling hacen muy poco ruido al funcionar. Éste es otro de sus grandes atractivos, y se debe a la ausencia de detonaciones en su ciclo y a las relativamente bajas velocidades de funcionamiento. Si disponen de un equilibraje correcto, la vibración generada es insignificante. De hecho, la principal fuente sonora de los Stirling no es el propio motor, sino los dispositivos auxiliares como el quemador y el ventilador de refrigeración. Por ejemplo, un autobús impulsado con un motor Stirling genera de 10 dB a 15 dB menos que uno convencional. 8.11 Sistemas de control En el capítulo anterior se han definido las curvas características de los motores Stirling como la evolución del par generado, en función de la velocidad y la presión. Cuando se utiliza el motor para mover una máquina receptora, ésta también presenta una curva de par resistente en función de la velocidad y de otros parámetros. El sistema motor-receptor tiende siempre a la velocidad que iguale los pares motor y resistente, y cualquier cambio en las curvas del motor o del receptor produce un transitorio hacia la nueva velocidad de equilibrio. Algunas aplicaciones como la generación eléctrica requieren el funcionamiento a velocidad constante, incluso frente cambios repentinos de la carga. Estos motores disponen de un sistema que modifica la curva del par motor en función de los cambios según la solicitación, para mantener siempre la misma velocidad de equilibrio. El paso de A a B en la figura 8.53 representa el control de velocidad constante. En cambio, la mayoría de aplicaciones piden controlar a voluntad tanto el par como la velocidad. En automoción, por ejemplo, se podría producir un cambio de A a C en la figura 8.51 cuando el vehículo afronte una rampa o bien cambie la relación de transmisión. © Los autores, 2002; © Edicions UPC, 2002. 462 Máquinas térmicas motoras Par, T (N.m) Tresistente Velocidad, n (r.p.m.) Fig. 8.53 Superposición de las curvas de par motor (por diferentes presiones medias) y de par resistente (por diversos niveles de carga), en función de la velocidad. En general, los motores han de disponer de algún sistema que mediante la variación de la curva de pares (o de potencias) controle la velocidad según alguna estrategia determinada, como por ejemplo mantener una frecuencia constante, o bien trabajar siempre a máximo rendimiento (mínimo consumo), o bien a máxima potencia, o a máximo par, etc. El sistema que parece más lógico a primera vista es la variación de la temperatura del calentador, mediante el control de la energía aportada por la fuente de calor -por ejemplo, cambiando el caudal de combustible. Modificando esta temperatura, las curvas de par y de potencia varían notablemente. Este método tiene la ventaja de que, sólo con una variable Tmáx , se controla el comportamiento del motor. Pero tiene dos inconvenientes suficientemente importantes como para hacerlo totalmente desaconsejable: el primero es que la inercia térmica propia del calentador hace que las reacciones del sistema sean muy lentas; el segundo es que Tmáx también influye mucho sobre el rendimiento, y como la mayor parte del tiempo se trabaja a cargas parciales, los rendimientos serían en promedio muy bajos. Por esto, todos los sistemas de control existentes se han diseñado como combinación de dos: uno que mantiene constante la temperatura del calentador, y otro que utiliza otros parámetros para gobernar las curvas de par. Los dos sistemas son: -El par (o potencia) se controla mediante el sistema de control del par, que puede ser de muchos tipos, pero todos con el mismo objetivo: producir los cambios deseados con la máxima rapidez y con el mínimo efecto sobre el rendimiento. -La temperatura del calentador Tmáx se mantiene constante a su valor más alto posible (límite metalúrgico), gracias al sistema de control de la temperatura, el cual adapta el flujo de calor © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 463 entrante, a las variaciones de la potencia. De esta manera los rendimientos siempre se mantienen lo más altos posible para cada situación. La mayoría de motores incorporan, a parte de estos dos, otros sistemas de control como elementos de seguridad -por ejemplo limitadores de velocidad, limitadores de presión máxima, sondas de temperatura en diferentes puntos, etc.-. 8.11.1 Variación de la temperatura El sistema de control de la temperatura se encarga de la regulación automática de la temperatura del calentador, manteniéndola constante a un valor próximo, pero inferior al límite metalúrgico, es decir, inferior a la temperatura en que el material del calentador fallaría por fatiga antes del número de horas de funcionamiento previstas. Este margen de seguridad, entre la temperatura límite y la temperatura regulada, es necesario por la presencia de puntos calientes en los tubos del calentador y también por las oscilaciones inevitables de la propia regulación. El margen será tanto más pequeño cuanto más regular sea la distribución de temperatura sobre los tubos, y cuanto más sensible y rápido sea el regulador. En motores calentados por combustión de fuel este margen puede sobrepasar los 100ºC, mientras que el uso por calentamiento indirecto con circuito de metal líquido permite márgenes mucho menores, es decir, rendimientos superiores. La manera de regular Tmáx depende del tipo de fuente de calor que se utilice. Todos los sistemas disponen de una o más sondas de temperatura al calentador, el valor de las cuales se trata y se amplifica para modificar convenientemente la potencia calorífica aportada al motor. En el caso de un quemador, se modifica el caudal de la mezcla aire-combustible; en un concentrador solar se varia el número de rayos incidentes sobre el calentador; en un reactor nuclear, se introducen o se extraen las barras de uranio de las fundas de grafito; etc. Como ejemplo, la casa United Stirling utilizó en 1977 un regulador de Tmáx consistente en un termopar situado en el calentador, la señal de la cual se amplificaba y accionaba una válvula de mariposa en el conducto de entrada de aire. A continuación una unidad k-Jetronic de Bosch se encargaba de injertar en el quemador el caudal idóneo de gasoil en cada instante. Las casas Phillips y Ford utilizaron sistemas parecidos. 8.11.2 Variación de la presión media del fluido de trabajo Como se han visto , las curvas par-velocidad dependen del valor de presión media del fluido de trabajo. A más presión, más par, y viceversa. A continuación se exponen unos ejemplos de este sistema. a) Sistema de velocidad constante (Phillips): En el esquema de la figura 8.54 si aumenta el par resistente la velocidad tiende a bajar, cosa que provoca la abertura de la válvula A (mediante un sistema mecánico, oleohidráulico o electrónico). La apertura de A permite el paso del gas de trabajo desde un depósito de alta presión hacia los cilindros. La presión media del ciclo aumenta y el par también, de manera que recupera rápidamente el nivel de velocidad deseado. En el caso contrario -cuando el par resistente cae, provocando un incremento de velocidad-, es la válvula B la que abre y permite el paso del gas desde los cilindros hacia un compresor, que lo reintroduce al depósito. En este caso, la respuesta en la recuperación de las rpm deseadas depende de la capacidad del compresor. © Los autores, 2002; © Edicions UPC, 2002. 464 Máquinas térmicas motoras Fig. 8.54 Sistema de control por variación de la presión media del fluido de trabajo, equipado con corto-circuito y aplicado a un motor de pistón y desplazador. A, B y C son las válvulas de control. 1- Depósito de fluido de trabajo a presión, 2- Cilindro, 3- Desplazador, 4- Pistón, 5- Cámara presurizada para evitar fugas de fluido, 6Válvulas anti-retorno, 7- Compresor. b) Sistema de velocidad constante con corto-circuito (Phillips): Para que el sistema anterior recupere la velocidad de modo suficiéntemente rápido delante de una caída repentina del par resistente -y sin la necesidad de un compresor grande y pesado-, se puede completar el sistema con el corto-circuito o regulación por pérdida. Este método incorpora una nueva válvula C (que se abre siempre que lo hace B), la cual pone en comunicación una cámara del motor con cualquier otra cámara que contenga gas de trabajo. De esta manera la oscilación de la presión del ciclo pierde amplitud y cambia de fase, provocando una pérdida instantánea de potencia. La velocidad se regula rápidamente y el compresor, pequeño, tiene más tiempo para reintroducir el gas en el depósito. El corto-circuito permite incluso el funcionamiento del motor como freno. El sistema completo se muestra en el esquema de la figura 8.54. c) Sistema de velocidad variable: Se basa en el mismo concepto que el sistema de velocidad constante con corto-circuito, pero en este caso las válvulas A y B/C se controlan directamente a través de pedales o palancas, o bien mediante un comandamiento electrónico. Delante de un par resistente estable, la apertura de A aumenta la velocidad, mientras que la apertura de B/C la reduce, pudiendo llegar a actuar el motor como freno. Sólo hace falta garantizar que las tres válvulas no se abran nunca simultáneamente. Las casas Phillips, United Stirling y General Motors utilizaron este sistema con muy pocas variaciones. © Los autores, 2002; © Edicions UPC, 2002. 8 Motor Stirling 465 8.11.3 Variación de la amplitud de la presión Un aumento del volumen muerto (volumen no barrido por pistones y desplazadores) en los motores Stirling supone una reducción de la relación de compresión y, en consecuencia, una disminución del trabajo generado en cada ciclo. El control por variación de la amplitud de la presión se basa en este fenómeno: regula el par variando el volumen muerto del motor. Una serie de válvulas pueden comunicar los cilindros del motor con diversas cámaras de diferente capacidad y llenas de fluido de trabajo, que se encuentran incorporadas en el mismo cárter. A cada combinación de válvulas abiertas le corresponde un determinado volumen añadido, de tal manera que, con una secuencia adecuada de apertura de las válvulas se consigue una evolución escalonada, pero bastante regular, del volumen muerto. Este sistema ofrece un ventaja adicional: el rendimiento se ve menos afectado por la variación del volumen muerto que por el uso del corto-circuito. Las razones por las cuales sus inventores (United Stirling) abandonaron este buen sistema son seguramente el volumen y el peso añadidos al motor y el coste del sistema de accionamiento de las válvulas. 8.11.4 Variación del ángulo de fase Se ha comentado con anterioridad que el ángulo de desfase del movimiento senoidal de los dos émbolos no afectaba demasiado a la potencia mecánica generada por un motor Stirling. Esto es cierto para ángulos del intervalo 60º-120º, pero cuando se amplía el intervalo de desfase de 0º a 360º la potencia aparece como una función casi senoidal respecto el ángulo, como muestra la figura 8.53. Variando el ángulo de desfase, no sólo se puede reducir la potencia generada (o par), sino que se puede hacer negativa, es decir, el motor puede pasar a ser una bomba de calor que actúa como freno, o si el par resistente lo permite, se puede invertir el sentido de giro. Este sistema es aplicable sólo a motores de simple acción, conectando los dos émbolos a dos ejes diferentes, el movimiento de los cuales se desfasa con un sistema de engranajes planetarios. Los motores de doble acción, en cambio, tienen un ángulo de desfase invariable -siempre vale 360º dividido por el número de cilindros-, y por esto no se pueden controlar por este método. 8.11.5 Variación de la carrera El recorte de la carrera de un pistón o de un desplazador deja sin barrer un cierto volumen de cada cilindro. Este volumen no barrido pasa a aumentar el volumen muerto del motor, hecho que, como se ha visto, afecta en gran medida a su par y su potencia. Este sistema se ha aplicado con éxito a motores de transmisión por plato oscilante, en el cual la modificación del ángulo de oscilación provoca la variación de la carrera de los pistones. En el resto de transmisiones mecánicas la aplicación del sistema es más difícil. © Los autores, 2002; © Edicions UPC, 2002. Máquinas térmicas motoras Potencia 466 ángulo de fase Fig. 8.55 Efecto del ángulo de fase del movimiento relativo de los dos émbolos sobre la potencia. A- Máxima variación de volumen pero sin generar potencia, B- Máxima potencia generada, C- Variación de volumen nula (no genera potencia), D- Máxima absorción de potencia (el motor actúa como a freno, como una bomba de calor). Ahora bien, es en los motores Stirling de pistón libre donde este método de control se utiliza habitualmente. En estos motores, la amplitud de oscilación del pistón se regula de forma natural: a más carga, menor amplitud, y viceversa. Pero si se dispone de un sistema limitador del desplazamiento -como un muelle de gas a presión regulable-, se puede controlar perfectamente el par generado por el motor. © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 467 9 Cogeneración 9.1 Introducción Se entiende por cogeneración la producción simultánea o secuencial de energía mecánica (transformable en eléctrica) y energía térmica útil, a partir de una misma fuente de energía primaria, como se esquematiza en la figura 9.1. La forma más común de aprovechar la energía térmica es la obtención de vapor a alta o baja presión para aprovechamiento en procesos industriales o para acondicionamiento de edificios. Energía Mecánica Energía Primaria SISTEMA COGENERATIVO Energía Térmica Fig. 9.1 Diagrama de flujos de energía La principal razón para la aplicación de la cogeneración en la industria o en el sector sevicios es la mayor efciciencia obtenida en producir conjuntamente energía eléctrica y térmica, que en producirlas independientemente. Es decir, a partir de una misma cantidad de energía primaria, el nivel de energía aprovechada es más elevado. La figura 9.2 muestra un ejemplo del ahorro de energía primaria que supone un sistema de cogeneración en comparación con el consumo eléctrico (suministrado por una compañía eléctrcia) y de combustible para producir vapor en una planta convencional. Las ventajas principales de la cogeneración son: a) Rendimientos elevados: El rendimiento térmico de las grandes plantas modernas de potencia es alrededor del 40%, pero teniendo en cuenta la utilización de plantas antiguas, más pequeñas y de rendimientos inferiores, se puede considerar que el rendimiento medio de generación eléctrica es del 30 %. Por lo tanto, una gran cantidad de energía se pierde en forma de calor residual. © Los autores, 2002; © Edicions UPC, 2002. 468 Máquinas térmicas motoras Produciendo electricidad y vapor conjuntamente por cogeneración, el rendimiento medio puede oscilar entre el 50% y el 85%. b) Disminución de la contaminación: El mejor aprovechamiento de energía en la generación de electricidad supone una disminución de la contaminación, ya que disminuye el consumo de combustibles fóssiles. El hecho de no disipar directamente al ambiente grandes cantidades de calor también supone un beneficio medio-ambiental. c) Diversificación energética: La cogeneración permite aprovechar calores residuales y combustibles derivados de los procesos. d) Ahorro económico: En primer lugar se reducen los costes de generación y distribución de electricidad respecto a los sistemas convencionales. Por otro lado, los usuarios encuentran en la cogeneración un menor coste de la electricidad autoconsumida y un posible beneficio en el caso de vender el exceso de energía eléctrica producida. Estos ahorros favorecen una rápida amortización de las inversiones. e) Incremento de la garantía de suministramiento eléctrico: En caso de fallo de suministro por parte de la compañía, existe una autosuficiencia en el abastecimiento de los procesos propios de la producción. f) Ventajas para la compañía eléctrica: Posibilidad de reducir la poténcia de reserva y utilización más económica de sus medios de producción. g) Legislación favorable: La legislación de la mayoría de los países industrializados favorece la instalación de plantas cogeneradoras bajo condiciones de rendimientos mínimos y niveles de producción. h) Diseño modular: Posibilidad de desarrollar una instalación modular progresiva en función de la demanda de energía. Devido a la proliferación de instaladores e instalaciones de cogeneración. La tendencia actual es el diseño modular y la utilización de componenetes prefabricados. i) Mejoras en la red de distribución de gas natural: El incremento de la demanda de gas natural, por sus buenas cualidades como combustible limpio, ha provocado una mejora en las redes de distribución. El gas natural es un combustible muy utilizado en las instalaciones de cogeneración (turbinas de gas y motores alternativos). Como desventajas principales destacan: a) Problemas para la compañía: La cogeneración supone una evidente reducción del mercado para las compañías eléctricas. Además, la conexión de los equipos de las instalaciones de cogeneración a la red puede comportar una série de problemas para regularla. b) Inversión adicional: La instalación de los equipos de cogeneración supone una inversión adicional sobre la planta de producción, y una actividad que generalmente no es la propia de la empresa. © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 469 c) Aumento de la contaminación local: Aunque la cogeneración permita obtener un beneficio medio-ambiental a nivel global, el aumento del consumo de combustible en la propia planta provoca un aumento de la contaminación local para el cogenerador. d) Normativa compleja: Es necesario regular las relaciones cogenerador-compañía eléctrica con una reglamentación adecuada, con la finalidad de favorecer las instalaciones de cogeneración siempre que éstas supongan un beneficio real para el medio ambiente y el ahorro energético. Sistema convencional de generación de energía eléctrica y térmica Rendimiento eléctrico: 33% (92) Combustible (153) Rendimiento térmico: 90% (61) (30) Unidades de energía eléctrica (62) Pérdidas (6) Pérdidas (55) Unidades de energía térmica Sistema de cogeneración Combustible (100) Rendimiento eléctrico: 30% (100) Rendimiento térmico: 80% (30) Unidades de energía eléctrica (55) Unidades de energía térmica (15) Pérdidas Fig. 9.2 Ahorro de energía primaria en un sistema de cogeneración 9.2 Tipologías de cogeneración El proceso secuencial de generación y consumo de calor útil y electricidad admite dos posibilidades, según el primer eslabón de la cadena sea una u otra forma de energía. En un ciclo de cabecera (topping) (Fig. 9.3), que es con diferencia el tipo más frecuente de cogeneración, la energía eléctrica (mecánica) es generada en el primer escalón, a partir de la energía química de un combustible y la energía térmica resultante, el denominado calor residual es suministrado a los procesos constituyendo el segundo escalón. © Los autores, 2002; © Edicions UPC, 2002. 470 Máquinas térmicas motoras Co mbustible Generador de electricidad Gases escape a proceso Fig. 9.3 Ciclo de cabecera Co mbustible Generador de electricidad Flujo calorífico Proceso Flujo residual Salida a la atmósfera Fig. 9.4 Ciclo de Cola Por el contrario, en un ciclo de cola (bottoming) (Fig. 9.4) la energía térmica residual de un proceso es utilizada para producir electricidad. Los ciclos de cola están normalmente asociados con procesos industriales en los que se presentan altas temperaturas, por ejemplo las que se encuentran en la producción de productos químicos tales como amoníaco, etileno, etc. En tales procesos resultan calores residuales a unos 900 ºC que pueden muy bien ser utilizados para la producción de vapor y electricidad. Los ciclos de cabecera, por el contrario, pueden ser aplicados a procesos que requieren temperaturas moderadas o bajas. Por esta razón, como ya se ha dicho anteriormente, tienen un campo de aplicación mucho más amplio y permiten una mayor versatilidad en la selección del equipo. Además, los calores residuales que son utilizados en los ciclos de cola son, en muchas ocasiones, efluentes corrosivos, por lo que se requiere el uso de intercambiadores de calor muy costosos. Existe una gran variedad de equipos y tecnologías que pueden ser considerados para una aplicación especifica de cogeneración. Cada tecnología tiene sus características propias, que deberán ser consideradas en el contexto de los requerimientos específicos del lugar. Se comentan a continuación peculiaridades de las tecnologías que pueden ser utilizadas en una instalación de cogeneración. © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 471 9.2.1 Cogeneración con turbinas de gas En el sistema de cogeneración con turbina de gas (Fig. 9.5) el combustible es introducido en una cámara de combustión donde quemará. Los productos de la combustión son gases a alta presión y temperatura. Estos gases son introducidos en una turbina, donde su energía es convertida en energía mecánica, que a su vez puede ser transformada en energía eléctrica mediante un alternador. La energía residual, obtenida en forma de un flujo de gases calientes (al rededor de los 500ºC) se pude utilizar para cubrir las demandas térmicas del proceso en su totalidad o parcialmente. Combustible Cámara combustión Generador de electricidad Compresor Turbina Aire Gases de escape Fig. 9.5 Esquema de una turbina de gas Los gases en la salida de la turbina tienen un gran nivel energético. La cogeneración consiste en aprovechar esta energía residual. Los tres tipos más comunes de cogeneración con turbinas de gas son los siguientes: 1. Cogeneración en ciclo simple con generador de vapor por recuperación 2. Utilización directa de los gases 3. Inyección de vapor Las principales ventajas de la cogeneración con turbinas de gas son las siguientes: a) b) c) d) e) Amplio abanico de aplicaciones Alta fiabilidad Alta temperatura de los gases de escape Rango de potencias entre 0,5 y 100 MW Gases con alto contenido de oxígeno, que permiten una postcombustión Las desventajas más relevantes son: a) Limitaciones en los combustibles utilizables b) Vida de trabajo relativamente corta © Los autores, 2002; © Edicions UPC, 2002. 472 Máquinas térmicas motoras 9.2.2 Cogeneración con turbinas de vapor En el sistema de cogeneración con turbina de vapor (Fig. 9.6) el combustible se introduce en una caldera de vapor. Este vapor, a alta presión, se expande en la turbina. De esta manera se obtiene energía mecánica en el eje de la turbina, utilizada para accionar un alternador. El vapor a baja presión y alta temperatura, resultante de la expansión dentro de la turbina, es aprovechable para procesos posteriores. Los principales componentes de una instalación con turbina de vapor son: la caldera de generación de vapor, la turbina de vapor y los dispositivos de recuperación de calor. Gases de escape Agua de alimentación Generador de vapor Vapor a alta presión Generador de electricidad Combustible Turbina de vapor Vapor a baja presión Fig. 9.6 Cogeneración con turbina de vapor Las principales ventajas de las turbinas de vapor para cogeneración son: a) Alta eficiencia global b) Alta seguridad c) Pueden utilizarse todo tipo de combustibles d) Larga vida de trabajo e) Amplio rango de potencias f) Sistemas muy probados respecto los cuales existe una gran experiencia Las desventajas: a) b) c) d) Baja relación electricidad-calor No se pueden alcanzar potencias eléctricas altas Alto coste de instalación Puesta en marcha lenta © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 473 9.2.3 Cogeneración con motores alternativos de combustión interna Los motores de combustión interna son también utilizados en equipos de cogeneración. En aspectos de concepción, difieren poco de las turbinas de gas (generación de electricidad mediante alternador acoplado al eje del motor y aprovechamiento del calor de los gases de escape), pero hay importantes diferencias térmicas. Los motores tienen un eficiencia en la generación de energía eléctrica superior a la de las turbinas de gas, pero su rendimiento térmico es inferior (diferencia de temperaturas entre los gases de escape y los circuitos de refrigeración). En los motores alternativos de combustión interna, el calor puede ser recuperado del sistema de lubricación, del sistema de enfriamiento y de los gases de escape. En los motores Diesel, también se puede recuperar calor del sistema de enfriamiento del aire de admisión. En la figura 9.7 se observa un esquema general de una instalación de cogeneración con motor alternativo. Gases de escape Agua de alimentación Generador de vapor Vapor a alta presión Consumo de vapor Consumo de agua caliente Motor Alternativo Generador de electricidad Refrigeración Motor Agua Combustible Fig. 9.7 Cogeneración con motor alternativo La principal ventaja de los motores alternativos de combustión interna en aplicaciones de cogeneración es la flexibilidad que presentan bajo variaciones de demanda, sin un aumento importante en el consumo específico del motor. Otras ventajas son las siguientes: a) Buena relación electricidad / calor producido b) Eficiencia eléctrica elevada © Los autores, 2002; © Edicions UPC, 2002. 474 Máquinas térmicas motoras c) Inversión más económica que en otras tecnologías d) Larga vida de trabajo Las principales desventajas son: a) Alto coste de mantenimiento, aunque es poco especializado b) Energía térmica a baja temperatura (diferentes niveles energéticos) 9.2.4 Cogeneración mediante ciclos combinados La tecnología del ciclo combinado en centrales de generación está basada en la combinación de turbinas de gas y turbinas de vapor, con la finalidad de aumentar el rendimiento de la instalación. Con la combinación de la turbina de gas y la turbina de vapor, se aprovecha la temperatura de los gases de escape de la turbina de gas (que mueve un generador eléctrico) para generar el vapor que acciona la turbina de vapor. La turbina de vapor acciona otro generador eléctrico conectado en paralelo con el de la turbina de gas, obteniendo en la salida vapor a baja presión con una energía térmica también utilizable. De esta manera se consigue una utilización integral de la energía y elevar el rendimiento térmico global. El concepto de ciclo combinado se puede extender a la combinación de otras tecnologías, como por ejemplo un motor alternativo y una turbina de vapor. En la figura 9.8 se muestra un esquema básico de un ciclo combinado con turbina de gas y turbina de vapor. Gases Agua GENERADOR DE VAPOR Combustible TURBINA DE GAS TURBINA DE VAPOR Consumo Aire Fig. 9.8 Cogeneración en ciclo combinado Con ciclo combinado, el rendimiento térmico global resulta ligeramente inferior al del ciclo cogenerativo convencional con generador de vapor y turbina de contrapresión. La razón es la necesidad de trabajar con exceso de aire en la turbina de gas y el aumento de pérdidas mecánicas. A pesar de esto, el ciclo combinado resulta muy ventajoso porque en igualdad de condiciones se genera una cantidad mayor de energía eléctrica, lo que supone un ahorro de combustible. © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 475 9.2.5 Otras tecnologías de cogeneración En el campo de la cogeneración hay otras tecnologías, de las cuales algunas ya están totalmente desarrolladas y otras que se encuentran en proceso de desarrollo. 1. Motor Stirling. Este tipo de motor puede utilizar cualquier tipo de combustible ya que es un motor de combustión externa. Presentan varias ventajas sobre los motores alternativos de combustión interna: rendimiento térmico superior e impacto medioambiental menor, ya que, aparte de reducir las emisiones contaminantes, se pueden utilizar combustibles alternativos. Las aplicaciones actuales de esta tecnología están centradas en plantas de pequeña potencia (sobre los 300 CV), pero las investigaciones van dirigidas a una obtención de potencias superiores (2.000 CV). 2. Ciclo de Rankine con fluido orgánico. Estos equipos están formados por un intercambiador de calor evaporador, una turbina y un sistema de control. En este caso, el combustible es un fluido orgánico. Estas instalaciones pueden llegar a recuperar calores residuales a 250ºC, con rendimientos que oscilan alrededor del 20%. 3. Células de combustible. Son dispositivos para convertir directamente la energía de un combustible (hidrógeno o gas rico en hidrógeno) y un oxidante en energía eléctrica. Como en este proceso se desprende calor, también es aplicable la cogeneración. Los componentes básicos de un sistema de célula de combustible son: la célula; el subsistema de suministro de combustible (normalmente un procesador para producir H2); un conversor eléctrico para modificar la energía eléctrica a una forma aceptable para el usuario. Las células se componen de dos electrodos separados por un electrolito. En genera,l en las células de combustible el combustible se dirige hacia el ánodo poroso que está recubierto por un catalizador, por ejemplo platino, que hace que las moléculas de hidrógeno se disocien en iones y electrones. Estos iones pasan a través del electrolito al cátodo y los electrones crean una corriente por un hilo conductor que une los dos electrodos. Las principales ventajas de las células de combustible: alto rendimiento, incluído a baja temperatura y también a carga parcial, bajo nivel de emisiones nocivas, poco ruido, facilidad de instalación y modularidad. Los inconvenientes actuales son el elevado preco de fabricación, la seguridad en el almacenaje del H2 y el gran volumen necesario de pilas de combustible para obtener potencias adecuadas. 4. Bombas de calor. Pueden utilizarse en sistemas de cogeneración para aumentar la temperatura de algún calor residual, a fin de su utilización en los procesos. 9.2.6. Campos de aplicación La cogeneración tiene una amplia aplicación tanto en el sector industrial como en el sector servicios. El funcionamiento de los procesos de gran nombre de industrias se adapta a las posibilidades de aplicación de la cogeneración, además de otras posibles ventajas legales y/o económicas. Otra aplicación se encuentra en edificios y locales de servicios, tal como hospitales, polideportivos, etc. Las características de demanda eléctrica y térmica (calefacciones y/o aire acondicionado) hacen que la cogeneración sea un sistema de autoabastecimiento muy atractivo desde el punto de vista económico para este tipo de establecimientos. © Los autores, 2002; © Edicions UPC, 2002. 476 Máquinas térmicas motoras En general, la mayoría de las instalaciones que se encuentran para aplicaciones de gran potencia son de turbina de gas. La aplicación de motores alternativos es utilizada mayoritariamente en instalaciones de menor potencia. Este aspecto se puede apreciar comparando el número de instalaciones de cada tipo en Cataluña (Tabla 9.2).En la tabla 9.1 se muestra la situación de la cogeneración en Cataluña en los sectores industriales y terciario en el año 1994. En la tabla 9.2, se hace la diferenciación por rangos de potencia en la industria catalana. Tabla 9.1 Situación de la cogeneración en Cataluña por sectores. Datos de 1995 785%,1$ 02725(6 &,&/2 785%,1$6 '(*$6 $/7(51$7,926 &20%,1$'2 '(9$325 727$/ Sector Número de Potencia Número de Potencia Número de Potencia Número de Potencia Número de Potencia Económico instalaciones (kW) instalaciones (kW) instalaciones (kW) instalaciones (kW) instalaciones (kW) Industrial 22 124.830 27 47.416 7 84.750 10 28.385 66 285.381 Terciario 2 4.360 50 6.080 0 0 1 1.700 53 12.140 TOTAL 24 129.190 77 53.496 7 84.750 11 30.085 119 297.521 Tabla 9.2 Situación de la cogeneración en Cataluña por potencia. Datos de 1995 785%,1$ '(*$6 RANGO DE POTENCIAS (MW) 02725(6 &,&/2 $/7(51$7,926 &20%,1$'2 785%,1$6 727$/ '(9$325 Número de Potencia Número de Potencia Número de Potencia Número de Potencia Número de Potencia instalaciones (kW) instalaciones (kW)) instalaciones (kW) instalaciones (kW) instalaciones (kW) 3.129 <0.5 0 0 10 2.729 0 0 1 400 11 0.5 – 1 1 560 7 4.907 0 0 3 2.085 11 7.552 1–5 12 39.320 6 14.788 2 6.900 3 7.300 23 68.300 5 – 10 5 35.500 4 25.000 2 14.600 3 18.600 14 93.700 >10 4 49.450 0 0 3 63.250 0 0 7 112.70 TOTAL 22 124.830 27 47.416 7 84.750 10 28.385 66 285.38 9.3 Caracterización y evaluación de instalaciones de cogeneración 9.3.1 Rendimientos Dado el siguiente sistema de cogeneración (Fig. 9.9), donde Qe es la potencia eléctrica generada, Qh la energía asociada a la generación de calor por unidad de tiempo y Qf es la energía asociada al consumo de combustible por unidad de tiempo, © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 477 Qe Qf SISTEMA COGENERATIVO Qh Pérdidas Fig.9.9 Balance de energía en un sistema cogenerativo se pueden definir los rendimientos: 1. Rendimiento energético de obtención de potencia ηe=Qe/Qf (9.1) 2. Rendimiento energético de generación de calor ηh=Qh/Qf (9.2) η= (Qe+Qh) /Qf (9.3) 3. Rendimiento energético total 4. Rendimiento exergético de obtención de potencia φe=Ee/Ef (9.4) 5. Rendimiento exergético de generación de calor φh=Eh/Ef (9.5) φ= (Ee+Eh)/Ef (9.6) 6. Rendimiento exergético total La exergía asociada a la generación eléctrica (Ee) se puede identificar directamente a la potencia neta producida por la máquina de accionamiento del sistema de cogeneración (turbina de gas, turbina de vapor o motor alternativo). La exergía asociada a la generación de energía térmica (Eh) depende de las características del calor generado (por ejemplo, si se genera vapor, la exergía es debida al desequilibrio de presión y temperatura con el medio ambiente, y solo depende de la componente termomecánica). La exergía asociada al consumo de combustible (Ef) engloba todos los posibles gastos existentes en el sistema de cogeneración (turbinas, motores, calderas...) y se puede considerar sólo la componente química despreciando la termomecánica. © Los autores, 2002; © Edicions UPC, 2002. 478 Máquinas térmicas motoras 9.3.2 Coeficientes para caracterizar las instalaciones de cogeneración A parte de los rendimientos globales de las instalaciones y de sus componentes, existen una serie de parámetros para cuantificar la eficiencia de las instalaciones de cogeneración. En general, todos van encaminados a evaluar el ahorro energético en función de la energía producida con el combustible utilizado, o a determinar la relación entre la producción de energía eléctrica y energía térmica. A continuación se indican algunos de los parámetros más utilizados. 1. Factor de utilización de la energía (FUE). Se define como )8( 4 4 4 H K (9.7) I donde Qe es el trabajo, Qh el calor útil generado en la instalación de cogeneración y Qf la energía asociada al combustible. Se observa que este parámetro coincide con el rendimiento global de la instalación h. Este criterio de eficiencia no es totalmente satisfactorio porque asigna el mismo peso al trabajo y al calor, y, como se ha visto, son dos formas de energía de diferente calidad termodinámica, lo cual se traduce en diferentes precios. 2. Factor ponderado de utilización de la energía (FUEP). A diferencia del parámetro anterior, éste tiene en cuenta el diferente peso entre la electricidad y el calor. Se definen los precios de venta de electricidad, calor útil y combustible como pe, pq y pf respectivamente. La expresión del factor ponderado es )8(S S 4 S 4 S4 H H T I K (9.8) I 3. Índice de calor neto (Net Heat Rate, NHR). Es la relación entre el combustible utilizado que se puede atribuir a la energía eléctrica producida, y la producción de electricidad de la instalación. El combustible que se atribuye a la energía eléctrica producida se calcula restando el combustible que haría falta para producir el vapor generado en una caldera convencional al combustible total utilizado. Cuanto más bajo sea este índice, más eficiente será la utilización del combustible. 4. Índice energía eléctrica/vapor (Power to Heat Rate, PHR). Es la relación entre la energía eléctrica y térmica producidas. Tiene gran importancia para saber el tipo de tecnología más adecuado en cada caso, según las curvas de demanda de energía eléctrica y térmica. La tabla 9.3. muestra algunos valores orientativos. 5. Índice de combustible ahorrado (Fuel Saving Rate, FSR). Representa el combustible desplazado de las grandes centrales de producción de electricidad, por unidad de vapor de proceso producido. En una planta de potencia estándar se puede considerar un heat rate de 3. Por lo tanto FSR=(3-NHR)·PHR © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 479 Tabla 9.3 Índice PHR para tres tecnologías de cogeneración 7HFQRORJtD 0ZHPZW Motor Diésel 1,7-0,85 Turbina de gas 0,43-0,21 Turbina de vapor <0,23 Un sistema de cogeneración puede ser atractivo bajo el punto de vista de un índice y desfavorable bajo otro. La última decisión dependerá de factores tales como el tipo de combustible utilizado, la utilización de la energía generada, factores económicos, etc. 9.3.3. Ahorro de combustible La eficacia de un sistema cogenerativo se puede cuantificar con el ahorro de energía (consumo de combustible) que supone la producción de energía eléctrica Qe y térmica Qh con cogeneración, respecto a la producción por separado de estas energías: Ahorro = ∆Qf = (Qfe+ Qfh) - Qf Qfe: consumo para generar enrgía eléctrica Qe Qfh: consumo para generar vapor de energía Qh Qf: consumo de un ciclo cogenerativo para generar Qe i Qh Si definimos: 1. Rendimiento de la central eléctrica ηc=Qe/Qfe 2. Rendimiento del generador de vapor ηb=Qh/Qfh 3. Rendimiento eléctrico de la instalación de cogeneración ηe=Qe/Qf el ahorro se puede expresar como $KRUUR 4H ηF 4K ηE 4I 4H ηF 4K ηE 4H ηH 4K ηE © Los autores, 2002; © Edicions UPC, 2002. 4H η F ηH (9.9) 480 Máquinas térmicas motoras El ahorro relativo o índice de ahorro de energía (IAE) se puede relacionar con el factor anterior, ya que es el ahorro de combustible por unidad de energía requerida en los procesos de generación convencional: ,$( ∆4 I 4 4 IH (9.10) IK 9.4 Instalaciones de generación de potencia mediante ciclos combinados 9.4.1 Caracterización del ciclo combinado Como ya sea ha explicado la cogeneración con ciclo combinado está basada en la combinación de turbinas de gas y turbinas de vapor. Con esta combinación, se aprovecha la temperatura de los gases de escape de la turbina de gas (mueve el generador eléctrico) para generar el vapor que acciona la turbina de vapor. Al mismo tiempo la turbina de vapor acciona otro generador eléctrico, obteniendo a la salida vapor a baja presión con energía térmica utilizable. De esta forma se puede conseguir un salto térmico global de unos 1.000º K. Gracias a este hecho, se puede aprovechar más del 50% de la energía del combustible para generar energía eléctrica. La poténcia total obtenida es la suma de las potencias de la turbina de gas y de la de vapor. En sistemas cogenerativos convencionales de turbinas a contrapresión se obtienen altos rendimientos térmicos globales, del orden del 85%. La máxima cantidad de energía eléctrica que se puede producir en estas centrales está inversamente relacionada con la presión del vapor en la salida de la turbina. La relación (energía eléctrica/energía térmica del vapor) en estas centrales varia entre 80 y 240 kWh / 106 kcal. En caso de querer aumentar la energía eléctrica generada a igualdad de energía térmica en forma de vapor, se tiene que recurrir a centrales de cogeneración con ciclo combinado. Con esta tecnología se puede llegar a relaciones entre 800 y 1.800 kWh / 106 kcal. Con ciclo combinado, el rendimiento térmico global resulta entre 74 y 78%, es decir, ligeramente inferior al del ciclo cogenerativo convencional con generador de vapor y turbina de contrapresión. La razón es la necesidad de trabajar con exceso de aire en la turbina de gas y el aumento de pérdidas mecánicas. A pesar de ello, el ciclo combinado resulta ventajoso porque en igualdad de condiciones se genera una cantidad mayor de energía eléctrica, lo cual supone un ahorro de combustible. Hay que tener en cuenta que el mayor interés de los ciclos combinados se refiere a la generación de energía eléctrica. Cuando el interés prioritario es éste, las potencias de las plantas pueden variar entre los 60 y 600 MW, incluso se puede llegar a valores superiores en algunos casos (2.000 MW). Por lo que respecta a la cogeneración, en la que también es importante la producción de energía térmica, los rangos de potencias son inferiores a los 60 MW (entre 5-50mW). Menos de 5 MW no suelen ser rentables. Existen diferentes tipos de cogeneración con ciclo combinado. En la figura 9.10 se muestran diferentes formas. © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 481 CICLO COMBINADO CON TURBINA DE GAS Y DE VAPOR CALDERA DE RECUPERACIÓN SIN COMBUSTIÓN COMBUSTIÓN ADICIONAL A LA CALDERA DE RECUPERACIÓN LA COMBUSTIÓN ADICIONAL PARA LA CARGA DE PUNTA COMBUSTIÓN ADICIONA L PARA LA CARGA DE BASE COMBUSTIBLE IGUAL A LA TURBINA DE GAS Y A LA CALDERA DIFERENTE A LA TURBINA DE GAS Y A LA CALDERA CIRCUITO DE VAPOR CALDERA DE UNA PRESIÓN CALDERA DE DOS PRESIONES CALDERA DE TRES PRESIONES CALEFACCIÓN DEL PRECALENTADOR PARA MEZCLA PARA EXTRACCIÓN DE LA TURBINA DE VAPOR PARA VAPOR PROVINENTE DE LA CALDERA Fig. 9.10 Tipos de cogeneración con ciclo combinado En la figura 9.11. se puede ver el esquema completo de una instalación de cogeneración con todas sus partes. Todos sus componentes, al igual que sus funciones, ya han sido estudiadas. Según esta última figura, se puede ver que en el ciclo combinado no se realizan extracciones en la turbina de gas, ya que esto representaría una disminución de energía térmica utilizable posteriormente a la caldera de recuperación para generar vapor y introducirlo en la turbina de vapor. Por esta razón, en la turbina de gas se eliminan las extracciones y se añade un economizador de baja presión dentro de la caldera de recuperación, que realiza las mismas funciones que las extracciones. Otra solución que permite la reducción de temperatura de los gases en la salida de la turbina de vapor es producir vapor a dos diferentes presiones dentro de la caldera de recuperación. Con esta tecnología que requiere dos líneas de admisión en la turbina se consigue el máximo enfriamiento de los gases en la caldera de recuperación. © Los autores, 2002; © Edicions UPC, 2002. 482 Máquinas térmicas motoras G as natural (a presión) C ám ara de c om bustión Aire C om presor T urbina gas A lternador G ases de escape G as natural (a presión) Q uem ador de postc om bustión V apor a alta pres ión E conom izador V aporizador T urbina de contrapresión E conom izador C aldera de D e alta presión ó A gua de alim entación A lternador H um os V apor a proceso Fig. 9.11 Cogeneración en ciclo combinado con turbina de gas y vapor 9.4.2. Análisis termodinámico En un ciclo combinado, debido a la elevada temperatura del calor suministrado a la turbina de gas y la baja temperatura del calor disipado en la turbina de vapor, hay un gran aprovechamiento del combustible. El análisis termodinámico de esta tecnología se tiene que basar en el estudio por separado de sus dos tipos de componentes principales (turbina de vapor y turbina de gas). Ya se ha explicado el análisis termodinámico de estos componentes. De lo que se trata ahora es de juntar estos dos ciclos, el de Brayton para la turbina de gas y el de Rankine para la de vapor. Se considera la planta de la figura 9.12, que consiste en dos máquinas térmicas combinadas entre sí. El calor restante (Qs) de la máquina superior con rendimiento hs es el que hace funcionar la máquina inferior con un rendimiento hi. TS Q ηS WS QS T SI QS ηI WI QI TI Fig. 9.12 Máquinas térmicas en un ciclo combinado © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 483 El trabajo producido en el ciclo superior es Ws y el del inferior es Wi, y sus expresiones son: Ws = ηs·Q (9.11) Wi = ηi·Q (9.12) Qs=Q·(1-ηs) (9.13) Ya que se pueden relacionar Q y Qs como: el trabajo total generado por esta planta será la suma de los dos: W=Ws+ Wi=Q·(ηs+ηi-ηs·ηi) (9.14) Así, el rendimiento térmico de la planta en ciclo combinado se puede expresar de la siguiente manera: ηT=W/Q=Q·(ηs+ηi-ηs·ηi) / Q = ηs+ηi-ηs·ηi (9.15) Con este rendimiento se ve el interés en la utilización de este ciclo. El rendimiento térmico del ciclo superior aumenta en hi·(1-hs) cuando el calor cedido es utilizado para producir trabajo adicional en un ciclo a menor temperatura. Estos dos ciclos se pueden representar en un diagrama T-S. Como se trata del ciclo de Brayton para la turbina de gas y el de Rankine para la de vapor, el diagrama T-S resultante es el de la figura 9.13. 3 T 9 4 2 7 5 8 6 1 11 10 S Fig. 9.13 Diagrama T-S de un ciclo combinado © Los autores, 2002; © Edicions UPC, 2002. 484 Máquinas térmicas motoras Del estudio del ciclo combinado se pueden extraer nuevos parámetros. El consumo de aire del punto 4 se relaciona mediante el consumo m en la turbina de gas y el dosado (relación aire combustible) f: m4=m·(1+f) (9.16) El consumo de vapor dentro de la caldera de recuperación se puede expresar como: mv=[m·(1+f)h4·(TGE)+m·fp·PCI]·ηGV /(h9-h6) (9.17) donde: mv: Consumo de vapor en la caldera de recuperación m: Consumo de aire en la turbina de gas h4: Entalpía de los gases de escape de la turbina de gas h6: Entalpía del agua de alimentación de la caldera h9: Entalpía del vapor generado TGE: Temperatura de los gases de escape fp: Dosado de postcombustión ( consumo de combustible/unidad de masa de aire a través del compresor de la turbina de gas) PCI: Poder calorífico inferior del combustible hGV: Rendimiento del generador de vapor También se puede encontrar la poténcia eléctrica generada en la turbina de vapor y en la turbina de gas: NTV = m·(h9-h10)·ηm·ηe (9.18) donde: ηm: Rendimiento mecánico en la turbina de vapor ηe: Rendimiento eléctrico en la turbina de vapor NTG=m·[(1+f)·h4·(TGE)-h1]·(ηm·ηe/(1-ηm·ηe)) (9.19) Otro parámetro que se puede estudiar es el calor útil producido en la instalación de cogeneración en ciclo combinado. Qu = mv·(h10-h11) (9.20) Como se ha visto, hay diferentes parámetros para cuantificar el ahorro de combustible. Después de estudiar datos reales se observa que el ahorro relativo en ciclos cogenerativos convencionales, oscila entre el 5 y el 14%, mientras que en ciclo combinado se consiguen ahorros entre el 19 y el 34%. Este dato confirma el mayor ahorro de los ciclos combinados, hecho que hace que su implantación vaya en aumento. © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 485 9.5 Aspectos económicos de la cogeneración 9.5.1 Asignación de costes La forma más razonable de definir los costes de la energía eléctrica y térmica producibles como cogeneración es en función de los contenidos exergéticos de los flujos, y no solamente en función del contenido energético. De esta manera, 1 kW de energía eléctrica resulta más valioso que 1 kW de vapor a 15 bar, y éste más valioso que 1 kW de vapor a 2 bar. En este concepto se basa la teoría del coste exergético (TCE). Esta teoría tiene como principal objetivo la asignación de costes a flujos internos y productos de un determinado sistema energético. Como paso previo a la utilización de la TCE hay que definir muy claramente los límites del sistema energético, especificando los equipos de los cuales se compone y los flujos energéticos (matéria, calor o trabajo) con todas las interrelaciones. Todos los equipos (subsistemas) tienen una función establecida dentro de la instalación. Para definirla es imprescindible distinguir entre el flujo o flujos de entrada al equipo de los de salida. La TCE asigna a cada flujo un coste exergético en función de su contenido de exergía, con las siguientes propiedades: 1. El coste exergético de un flujo es una propiedad conservativa, por lo tanto se pueden formular tantas ecuaciones de balance de coste exergético como subsistemas formen la planta. 2. El coste de los flujos de entrada a la planta es igual a su exergía. 3. Si el flujo de salida de un equipo es igual al de entrada, se consideran iguales sus costes exergéticos unitarios. 4. Cuando un equipo tiene más de una corriente de salida, se asigna a cada una un coste exergético proporcional a la exergía que contienen, que es equivalente a considerar todos los flujos con el mismo coste unitario. 5. Las pérdidas de la instalación tienen un coste exergético nulo. Todas estas reglas permiten plantear las ecuaciones del coste del ciclo de cogeneración. La resolución del sistema permite obtener los costes exergéticos de los flujos y sus costes exergéticos unitarios. En caso que los recursos utilizados se valoren en unidades monetarias, se llega a la obtención de los costes económicos de la instalación. Para una distribución correcta de los costes, también se tienen que tener en cuenta factores económicos (coste del capital, compra y/o venta de energía de la red de distribución, nuevas demandas de calor, etc.), que se sumarán al coste exergético. Si se comparan los resultados de la TCE con los obtenidos siguiendo un criterio puramente energético (repartimiento de costes en proporción a la energía de los productos), se observa que con la aplicación de la TCE el coste del kWh eléctrico es mayor y el coste unitario del vapor menor. Si se compara todo esto © Los autores, 2002; © Edicions UPC, 2002. 486 Máquinas térmicas motoras con valores reales, se llega a la conclusión que la valoración exergética da resultados más razonables, ya que a parte de la cantidad también tiene en cuenta la calidad de las diferentes formas de energía. 9.5.2 Ahorro económico La principal ventaja de la cogeneración desde el punto de vista global de la sociedad es el ahorro de energía primaria. En otras palabras, desde el punto estrictamente termodinámico, la mejora es evidente. No obstante, la inversión que requiere una instalación de cogeneración representa un fuerte gasto económico que hay que estudiar muy bien para poder obtener un posterior ahorro económico. En lo que respecta al cogenerador, la principal ventaja es la reducción de gastos de energía global. La importante diferencia de precio entre la energía eléctrica y los combustibles (energía primaria) es la principal causa para conseguir ahorros económicos. Actualmente, el hecho que el precio del kWh autogenerado, añadiendo el coste de mantenimiento adicional, sea menos de la mitad si se compara con el precio que se paga a la compañía eléctrica, hace que se produzca un ahorro en pta/kWhe cogenerado que permite recuperar la inversión en la instalación en un plazo que a veces puede resultar muy reducido. La posibilidad de autosuministro eléctrico y la posible venta de excedente producido incrementa el ahorro. Hay que destacar, sinembargo, que este último factor citado está muy ligado a la legislación vigente en cada país. En la actualidad, en España está vigente el Real Decreto 2366/1994, que obliga las compañías eléctricas a comprar el excedente de energía eléctrica de los cogeneradores. 9.5.3 Estudios de viabilidad Como se ha visto en el apartado anterior, el aspecto económico es decisivo en el momento de realizar una inversión en una instalación de cogeneración. Por lo tanto, es muy importante hacer un estudio de viabilidad, que en la mayoría de los casos será para modificar una instalación ya existente y transformarla en una instalación de cogeneración. El estudio de viabilidad consta de las siguientes etapas: 1. Análisis de consumos térmicos y eléctricos 2. Evaluación de la factura energética en la situación actual 3. Evaluación de diferentes alternativas y de las inversiones necesarias 4. Simulación de las diferentes alternativas 5. Análisis de la rentabilidad de cada alternativa y propuesta final El análisis de consumos consiste en determinar las curvas de demanda térmica y eléctrica. Hace falta pues definir los diferentes periodos de funcionamiento y parada de los equipos y, después, tomar los datos de consumos en estos periodos. Lo más correcto para determinar estas curvas es la monitorización del proceso y el tratamiento matemático de los datos. © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 487 En la valoración de alternativas se tendrá que tener en cuenta tanto diferentes potencias como diferentes tecnologías, según los casos, y también la relación calor-electricidad. También serán un factor a tener en cuenta, como se ha dicho en el apartado 9.5.2, los aspectos legales de potencias y rendimientos mínimos para obtener la condición de cogenerador. Para poder estimar los ahorros que supone cada alternativa se tiene que recorrer a la simulación, conociendo previamente las curvas de consumo. En esta fase es de gran ayuda la informática. Existe una gran variedad de software informático que simula el funcionamiento de la instalación. Generalmente, estos programas incorporan también las subrutinas que realizan el análisis económico. La mayoría de estos programas hacen una simulación tomando como datos los valores instantáneos de consumos eléctricos y térmicos, la configuración del sistema y las características de los equipos que forman la instalación. De esta manera se simplifica mucho la comparación de diferentes alternativas y la comparación con la instalación actualmente existente. Algunos de estos softwares son: COGENE, elaborado por la igeniería española GREFEN; CELCAP, desarrollado por la Naval Civil Engineering Lagoratory (California); ENCOTECH, de ENCOTECH Inc. (Nova York); DEUS y COPE, que son programas subvencionados por el EPRI (Electric Power Research Institute). 9.6 Evaluación de las distintas posibilidades de cogeneración en un caso real 9.6.1 Características de la instalación sin cogeneración Las características de la instalación son las que se pueden ver en las siguientes tablas: Tabla 9.4 Características de la planta CARACTERÍSTICAS DE LA PLAN TA Tipo: Funcionamiento: Planta Diésel- Eléctrica de 7.500 kWe, a 3 x 380V, 50 Hz, formada por 6 grupos electrógenos de 1.250 kWe a 1.500 r.p.m. por funcionamiento con GASO IL. Todos los grupos trabajando a máxima carga durante 6 horas seguidas al día. © Los autores, 2002; © Edicions UPC, 2002. 488 Máquinas térmicas motoras Tabla 9.5 Características de cada grupo electrógeno CARACTERÍSTICAS DE CADA GRUPO ELECTRÓ GEN O Potencia continua según ISO 3046/1 (a 25ºC de temperatura ambiente, 25º de temperatura de entrada de agua en el enfriador del aire de sobrealimentación, 60% de humedad relativa del aire y 100 m de altura sobre el nivel del mar) Potencia continua en condiciones de referencia (35ºC de temperatura ambiente, 40ºC de temperatura de entrada de agua en el enfriador del aire de sobrealimentación, 70 % de humedad relativa del aire y 200 m de altura sobre el nivel del mar) Sobrecarga admisible durante una hora con intervalos de doce 1.320 kW 1.308 kW 10% 1500 r.p.m. Velocidad de giro 12 en "V" N úmero de cilindros 170 mm Diámetro de los cilindros 195 mm Carrera del pistón 53.11 L Cilindrada 19.9 bar Presión media efectiva 9.75 m/seg. Velocidad media del émbolo 4 tiempos Ciclo por agua Refrigeración Sobrealimentado Sistema de admisión Inyección directa Sistema de combustión Eléctrico a 24 V. c.c. Encendido © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 489 Consumo de combustible a 1/1 carga con 5% de tolerancia, utilizando gasoil de un PCI no menor que 42.700 kj/kg, en condiciones ISO sin bombas. 187 gr/kW.h Consumo de combustible a 1/1 carga con 5% de tolerancia, utilizando gasoil de un PCI no menor que 42.700 kj/kg, a 35ºC de temperatura ambiente, 40ºC 193 gr/kW.h de temperatura de entrada de agua en el enfriador de aire de sobrealimentación, 200 m de altura sobre el nivel del mar y con tres bombas (agua de camisas, agua circuito aire sobrealimentación y aceite). Consumo de aceite lubricante con 20% de tolerancia. 0.7 gr/kWh Cantidad de calor en el circuito HT, de agua de refrigeración del motor. 358 kW Temperatura del agua en la salida del motor en el circuito HT. 82ºC Temperatura del agua en la entrada del motor en el circuito HT. 75.7ºC Caudal de agua del circuito HT. 49 m3/h Cantidad de calor en el circuito N T, de agua de refrigeración del aire de sobrealimentación 250 kW Temperatura del agua de refrigeración del aire de sobrealimentación, en la salida del circuito N T. 45.5 ºC Temperatura del agua de refrigeración del aire de sobrealimentación, en la entrada del circuito N T. 40 ºC Caudal del agua del circuito N T. Cantidad de calor en los gases de escape. Temperatura de los gases de escape detrás de la turbina, con +- 20ºC de tolerancia. Cantidad de gases de escape. Cantidad de calor en radiación. Cantidad de aire de combustión a 25ºC © Los autores, 2002; © Edicions UPC, 2002. 39 m3/h 1.000 kW 420 ºC 8.210 kg/h 85 kW 6.920 m3/h 490 Máquinas térmicas motoras 9.6.2 Aspectos previos a considerar El aspecto básico a la hora de poder escoger qué tipo de instalaciones de cogeneración son posibles para una planta ya instalada es el tipo de servicio que se quiere obtener con mayor prioridad. En este caso el aspecto básico es el aumento de producción de energía eléctrica; por tanto, todas las instalaciones que se estudiaran están destinadas a aumentar esta producción. El hecho que esta planta esté ubicada en un polígono industrial puede hacer pensar en la posibilidad de la generación de vapor para vender a otras industrias cercanas que lo necesiten para sus procesos. Esta posibilidad tendría que estudiarse a parte, a fin de valorar económicamente si es mejor crear una red de distribución de vapor o aumentar la producción de energía eléctrica. Para hacer este estudio nos centraremos en esta última posibilidad. Otro aspecto previo importante a tener en cuenta es la disponibilidad de espacio; en este caso esto no resulta ningún problema, según se puede ver en la figura 9.14. 1$9( 1 Grupos Motor-Generador 2 3 4 5 6 1$9( Fig. 9.14 Esquema actual de la planta La planta está formada por dos naves. En la nave 1 es donde están los grupos motor-generador, que ocupan la mitad de la superficie, la otra parte de la nave y la nave 2 se utilizan como almacén. Estas partes que se utilizan como almacén y en especial la nave 2 son las que permitirán la instalación de la ampliación de la planta para cogenerar. Otro aspecto que hay que considerar es que la instalación tiene que estar conectada en paralelo con la red eléctrica. Éste es un aspecto básico ya que, como ya se ha dicho, la misión principal de esta instalación de cogeneración es la generación de electricidad para poder venderla. Una vez tratados los aspectos previos más relevantes se pueden comenzar a establecer las diferentes alternativas. © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 491 9.6.3 Alternativa 1: Ciclo combinado con turbina de vapor Debido a la existencia de un número muy elevado de turbo-alternadores, con relaciones de producción eléctrica/térmica que varia en unos límites muy grandes, hay que establecer un criterio en el momento de establecer un tipo de máquina o otro. Para esta aplicación en concreto el criterio que marcará es que la instalación de turbinaje tiene que estar conectada en paralelo a la red eléctrica. Como principales soluciones pensando en las exigencias de la instalación encontramos: 1. Ciclo combinado con turbina de vapor de contrapresión 2. Ciclo combinado con turbina de vapor de condensación Recordando la diferencia entre estos dos tipos de turbina, las turbinas de contrapresión son aquellas en las que el vapor en la salida se encuentra a una presión superior a la atmosférica. En las turbinas de condensación, la presión en la salida es ligeramente superior a la atmosférica y, por tanto, el vapor tiene que condensar a la salida. Como ya se ha dicho, las turbinas más habituales en instalaciones de cogeneración son las de contrapresión. Esto no es realmente lo que nos interesa en esta aplicación, ya que la finalidad de la instalación es la producción de más energía eléctrica, y no la de tener vapor a presión, utilizable para otros procesos. Tampoco se plantea la posibilidad de la utilización de vapor a diferentes niveles de presión, por lo que se descartan las turbinas con extracción y las turbinas con toma de vapor. En definitiva, para una instalación de turbinaje de vapor con las características ya descritas se podría pensar en una turbina de vapor de condensación, siempre y cuando no haya la posibilidad de vender vapor a las industrias vecinas, caso en el cual la opción más acertada sería la de turbina de vapor de contrapresión. Esta tecnología de ciclo combinado permite incrementar la potencia de la planta Diesel y el rendimiento de la misma. Los motores Diesel DEUTZ MWM tipo TBD 620V12 tienen una eficiencia eléctrica de aproximadamente el 40% (rendimiento medido en bornes del alternador). Si se añade una turbina de vapor, el rendimiento eléctrico bruto global de la planta puede llegar a alcanzar el 45%. Hay que tener en cuenta que con turbinas de vapor se puede trabajar a alta o baja presión de vapor de agua. A alta presión la potencia que se obtiene es mayor, pero no mucho más respecto a algunas disposiciones de baja presión. En cambio, el hecho de trabajar a altra presión implica unos costes en instalaciones muy superiores a si se trabaja a baja presión. Para conocer un orden de magnitud de la potencia que se puede obtener con la turbina, a continuación se realizan unos cálculos teóricos aproximados para poder ver que en el mercado existen turbinas de estas características. Estos cálculos se realizan suponiendo una turbina de alta presión. En el momento de escoger ciertos parámetros, como la presión y temperatura de entrada de vapor en la turbina, se han consultado los datos que ofrecen los constructores de las turbinas que actualmente existen en el mercado. © Los autores, 2002; © Edicions UPC, 2002. 492 Máquinas térmicas motoras 1.Cálculo teórico Se parte de la situación que muestra la figura 9.15 1 Gases de escape de los 6 motores Caldera 2 4 W Turbina 3 Agua de alimentación provinente de condensador 5 Vapor Fig.9.15 Cálculo de la potencia de la turbina Las suposiciones que se harán para los cálculos son las siguientes: a) Como volumen de control se tomará alternativamente la caldera y la turbina. b) Los volúmenes de control están estudiados bajo procesos de flujo y estado estacionario. c) No se tienen en consideración las posibles transferencias de calor entre la caldera y el entorno. d) Turbina adiabática. e) Los gases producto de la combustión (gas-oil PCI: 42.700 kJ/kg) se comportan idealmente con cp = 1.14 kj/kg·K f) Las propiedades del agua, que no tiene un comportamiento ideal, se encuentran en sus tablas de propiedades termodinámicas. En primer lugar definiremos las propiedades de cada punto, que se necesitarán en el momento de realizar los cálculos. Punto 1: Gases de escape de los motores: Datos según el fabricante. m = 8.210 kg/h x 6 motores = 49.260 kg/h T1 = 420 ºC © Los autores, 2002; © Edicions UPC, 2002. (9.21) 9 Cogeneración 493 Punto 2: Gases de escape después de la caldera: Hay que considerar 160ºC el valor mínimo para T2, ya que ésta es la temperatura a la que condensa el SO3. Teniendo en cuenta que a mayor temperatura de salida, menor será la poténcia eléctrica extraíble, tomaremos: T2 = 180ºC Punto 3: Entrada de agua a la caldera: Sabemos que P3 = P4 y cogeremos como valor de entrada en la turbina unos valores que estén de acuerdo con los facilitados por los fabricantes de turbinas: P3 = P4 = 40 bar y T3 = 80ºC ya que el calor de salida del agua de refrigeración de los motores podrá ser aprovechada para obtener esta temperatura. Se trata de líquido comprimido con h3 = 335.82 kJ/kg Punto 4: Entrada de vapor a la caldera: Como se ha dicho en el punto anterior este dato se toma consultando fabricantes existentes. P4 = 40 bar y T4 = 400ºC. Esta temperatura tiene que ser menor que la de los gases de escape, ya que si no lo fuera la caldera necesitaria un quemador adicional. Se trata de vapor recalentado con h4 = 3.215 kJ/kg Punto 5: Vapor de salida de la turbina: Como los cálculos se realizan suponiendo una turbina de condensación, el criterio es tener una presión de condensación lo más pequeña posible, aunque por motivos de rendimiento del condensador, esta presión no acostumbra a ser inferior a 0.95 bar. En este caso tomamos: P5 = 1 bar de vapor saturado con un título de 0.95. Se trata de vapor saturado con h5 = 2563.16 kJ/kg Se considera en primer lugar la caldera y se hace un balance de energía para un proceso de flujo y estado estacionario: ∆H = 0 > Hentrada = H salida (9.22) m ·h + m ·h = m ·h + m ·h (9.23) 1 1 3 3 2 2 4 4 © Los autores, 2002; © Edicions UPC, 2002. 494 Máquinas térmicas motoras Teniendo en cuenta el balance de masa: m1 = m2 = mgases (9.24) m = m = magua (9.25) 3 4 mgases·(h -h ) = magua·(h -h ) 1 2 4 (9.26) 3 El calor cedido por los gases de la combustión es igual al calor ganado por el agua de alimentación de la caldera. Como se ha considerado gas ideal, la variación de entalpía sufrida por los gases se puede expresar: ∆Hgases = mgases·(h -h ) = mgases· cp·(T -T ) 1 2 1 (9.27) 2 ∆Hgases = 49.260 kg/h · (1 h /3.600 s) ·1,14 kJ/kg·K · (693ºK - T ) 2 (9.28) De la expresión 9.26 se obtiene el flujo másico de agua en función de T2: magua = (49.260 kg/h · (1 h /3.600 s) ·2,05 kJ/kg·K · (693ºK - T2)) / (h4 - h3) magua = (15,6) · (693 - T2) / (3.215 kJ/kg - 335.82 kJ/kg) (9.29) (9.30) Para encontrar la potencia producida en la turbina se toma como volumen de control la turbina. El balance de energía para un proceso de flujo y estado estacionario adiabático es: W = ∆H = H salida - H entrada Wturbina = - magua ·(h5-h4) (9.31) (9.32) Sustituyendo los valores que teníamos hasta ahora nos queda una ecuación en función de la temperatura T2: W = - magua·(h5-h4) = - ((15,6)·(693-T2)/(2.879,18))·(2.563.16 kJ/kg - 3215 kJ/kg) Luego: (9.33) T2 = 180ºC > Wturbina teòrico = 847 kW Según fabricantes de calderas de recuperación, 180ºC es un valor perfectamente alcanzable de temperatura de salida. Hay que tener en cuenta que el valor obtenido de potencia tan solo sirve para ver el orden de magnitud, ya que para realizar los cálculos se tendrían que aplicar rendimientos. Esta potencia hay que multiplicarla por el rendimiento isoentrópico de la turbina (ηs), por el rendimiento mecánico del acoplamiento (ηmec) y por el rendimiento eléctrico (ηe). Wturbina real = Wturbina · ηs · ηmec· ηe © Los autores, 2002; © Edicions UPC, 2002. (9.34) 9 Cogeneración 495 Al comparar con los fabricantes de turbinas, se ve como estos valores en realidad pueden ser alcanzables por las turbinas disponibles en el mercado. Si se hacen los mismos cálculos con una turbina de contrapresión se llega a la misma conclusión. La tabla 9.6 muestra las turbinas de vapor de menor potencia que tiene en el mercado el fabricante KKK (Kühnle,Kopp & Kausch). Para saber si se trata de una turbina de condensación o de contrapresión, hay que ver el valor de la presión del vapor en el escape: Tabla 9.6 0RGHOR Accionamiento directo Reductor integrado Salida horizontal Salda vertical VALORES MÁXIMOS Potencia (kW) Revoluciones (r.p.m) Presión vapor entrada (bar) Temperatura vapor entrada (ºC) Presión vapor salida (bar) %) %) $)$) $)$&)$ $)$ &)5 &)5 si si no si si si si no no si si si si si si no BF3,5 si no BF4 si no AF3,5 AF4 si no AFA4-CFA4 si si AFA6 si no CFR3 si no CFR5 45 4500 270 4500 850 10500 2200/1600 16000/10500 5000 10600 2200 22000 5000 14000 100 46 100 40/125 41 65 65 500 500 500 450/530 450 480 460 8 11 17 0.1-17/26 0.1-11 1-17 1-11 Como se puede ver muchas de estas turbinas se pueden hacer funcionar como turbinas de condensación y como turbinas de contrapresión. Para la aplicación que se está estudiando, parece que una posible turbina sería la AFA4. El valor nominal de la potencia de esta turbina es de 2200 kW, con vapor de entrada a 40 bar y 450ºC. Estos valores son imposibles de alcanzar en la instalación estudiada, ya que los gases de escape salen a 420ºC. Este hecho no implica que no se pueda trabajar con esta turbina, ya que los fabricantes disponen de unas curvas donde se ve la potencia que se puede obtener con la turbina en otras condiciones de entrada de vapor. Como factor orientativo, considerando la turbina con una eficiencia del 35%, la cantidad de potencia real generada en la turbina estaría alrededor de 1.000kW, lo cual representa un aumento a considerar, a partir de una instalación que genera 7.500 kW. Uno de los puntos básicos a la hora de proyectar esta instalación sería la del diseño de la caldera de recuperación, que es la que permitirá llegar a los valores de vapor que necesita la turbina, a partir de los gases de escape de los seis motores. © Los autores, 2002; © Edicions UPC, 2002. 496 Máquinas térmicas motoras Una de las posibilidades que se tendría que estudiar es la postcombustión de los gases de escape de los motores. Estos gases tienen un exceso de aire que permitiría realizar una postcombustión sin necesidad de aportar combustible extra. Esta postcombustión se podría integrar en el conjunto de la caldera de recuperación, o en una unidad independiente anterior. La postcombustión permitiría aumentar la temperatura de los gases, de tal forma que se podría aumentar la temperatura del vapor en la entrada de la turbina de vapor y en consecuencia la potencia. A fin de cuantificar las mejoras aportadas con la postcombustión, se necesitaría la composición de los gases de escape y hacer un balance con el oxígeno. Un aspecto práctico muy importante a la hora de poner en marcha una instalación de este tipo es la cantidad de aceite que contienen los gases de escape y que pueden hacer que al llegar a la caldera de recuperación condensen y hagan que el rendimiento de la caldera sea muy inferior al normal. A fin de impedir esto, hay que controlar el exceso de aceite con el que trabajan los motores (aceite de lubricación que se quema en los cilindros); la mejor manera de controlarlo es programando un mantenimiento preventivo periódico para los motores. Un posible esquema para esta instalación podría ser el de la figura 9.16. Gases de escape Vapor a presión Caldera de recuperación Generador de electricidad Turbina Agua de alimentación Gases de escape de los seis motores Condensador Motor Alternativo Generador de electricidad Combustible Refrigeración de los motores Fig. 9.16 Cogeneración con ciclo combinado motor alternativo-turbina de vapor de condensación En general, las turbinas de vapor tienen mejor rendimiento cuanto mayor sea su potencia nominal y el coste del kW de potencia nominal es menor conforme mayor sea la turbina. Así pues, con el fin de © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 497 aumentar el rendimiento general de la planta, se puede pensar en aumentar su potencia mediante la instalación de motores alternativos o turbinas de gas. De este modo se consigue mejorar el rendimiento de la turbina de vapor y reducir el coste por kW de potencia de la turbina, a costa de ampliar de forma importante la potencia de la planta y una inversión mayor. No obstante, si la demanda de energía eléctrica es suficiente, este tipo de instalación podría recuperar la inversión antes que las alternativas que sólo incorporan una turbina de vapor. La elección entre la instalación de motores alternativos o turbinas de gas se hará teniendo en cuenta la instalación actual y la estrategia de la empresa. Así, en el caso que estamos estudiando, sería más apropiado pensar en la instalación de motores Diesel. 9.6.4 Alternativa 2: ciclo combinado con turbina de vapor y turbina de gas Como ya se ha comentado en el apartado anterior, esta instalación permite aumentar la potencia de la planta y conseguir un mejor rendimiento de la turbina de vapor. La idea de esta instalación es el motaje de una turbina de vapor y una turbina de gas en un mismo eje. De esta manera, cuando los motores estén parados, la turbina de gas funcionará de manera independiente a la de vapor, y cuando los motores funcionen, permitirán la generación de vapor en una caldera de recuperación que estará destinado a mover la turbina de vapor. En este caso la turbina de vapor escogida también podría ser una turbina de contrapresión, ya que así el vapor en su salida podría ser aprovechado para otros procesos, como por ejemplo para ser inyectado en la cámara de combustión de la turbina de gas. Otra posibilidad a fin de aprovechar los gases de escape de la turbina de gas, sería llevarlos a la caldera de recuperación para la generación de vapor. De esta manera las dos turbinas siempre estarían trabajando. Cuando los motores trabajasen se generaría más vapor y la turbina de vapor aumentaría la producción de energía eléctrica. La potencia obtenida sería la suma de la potencia de la turbina de vapor y la potencia de la turbina de gas. La potencia de la turbina de vapor sería del orden de la calculada en el punto 9.6.3, mientras que la de la turbina de gas dependería de los parámetros explicados posteriormente. El inconveniente que presenta esta instalación es la dificultad constructiva que representa acoplar en un solo eje un compresor, una turbina de gas, una turbina de vapor y el generador de electricidad, que sería común para las dos turbinas. Otra posibilidad sería la misma construcción en dos ejes, con dos alternadores diferentes; para rangos de potencias del orden del que se está trabajando aquí, parece que esta posibilidad también sería factible. Hay que tener en cuenta que tanto las turbinas como los alternadores tienen su mayor rendimiento cuando trabajan en sus condiciones de diseño; al disminuir éstas, también disminuye mucho su rendimiento. Esta condición implica, para todas las instalaciones de cogeneración y en especial para una tan compleja como ésta, la utilización de equipos de regulación y control automático con un diseño muy preciso y estudiado. Otro punto que hay que estudiar muy bien es la elección del alternador. Dependerá mucho de si se decidiera trabajar con un solo eje o con dos. En la figura 9.17 se puede ver el esquema de la instalación. En este caso se ha utilizado una turbina de condensación, a fin de tener un circuito cerrado © Los autores, 2002; © Edicions UPC, 2002. 498 Máquinas térmicas motoras de agua. Si se utilizara una turbina de vapor de contrapresión, el circuito de alimentación de agua a la caldera sería un circuito abierto. Vapor a presión . Gases esc. Combustible Generador de electricidad Cámara Combustión Compresor Turbina gas Turbina vapor Entrada aire Condensador Gases de escape de la turbina Agua de alimentación Gases de escape de los seis motores Motor Alternativo Generador de electricidad Combustible Refrigeración de los Motores Fig. 9.17 Cogeneración con ciclo combinado motor alternativo-turbina de gas-turbina de vapor En la tabla siguiente (Tabla 9.7) se puede ver una muestra de fabricantes que ofrecen instalaciones de ciclo combinado con turbinas de gas y turbinas de vapor.. © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 499 Tabla 9.7 )DEULFDQWH 3RW N: N-N:K 5HQG QGH7* 3RW7* N: 3RW79 N: Kawasaki Heavy Industries, Ltd. 969000 6815 50,3 4 x 13E2 634000 335000 Ansaldo Energia 770000 6261 57,6 2 x V94.3A 510000 270000 730000 6204 57,9 2x W501G 500000 245000 656800 6935 54 3 x 13E 426600 230200 584500 6545 52,3 2x V94.2A 367000 230000 550000 6457 57,5 2x W501F 365000 196000 482700 6840 48,7 2 x 13E2 317000 165700 475000 6844 50,2 2 x V94.2 304000 177000 467500 6963 56 2x V94.2 304000 173000 437800 6935 60 2 x 13E 284400 153400 254100 141800 240600 135900 Siemens AG, Power Generation, Gas Turbines&Plants Kawasaki Heavy Industries, Ltd. Siemens AG, Power Generation, Gas Turbines&Plants Siemens AG, Power Generation, Gas Turbines&Plants Kawasaki Heavy Industries, Ltd. Ansaldo Energia Siemens AG, Power Generation, Gas Turbines&Plants Kawasaki Heavy Industries, Ltd. Nuovo Pignone 390800 6350 49,3 Kawasaki Heavy Industries, Ltd. 376500 7230 56,5 1x MS9001FA 3 x 11N 329000 6940 57,1 2 x V84.2 210000 124000 323500 7031 49,7 2x V84.2 208000 122200 167000 100700 170850 95600 158500 79900 137800 83700 133000 76000 Siemens AG, Power Generation, Gas Turbines&Plants Siemens AG, Power Generation, Gas Turbines&Plants GE Power Systems 263600 7070 51,9 GE Power Systems 262600 6425 52 Kawasaki Heavy Industries, Ltd. 238400 6925 41,9 2x MS7001EA 1x MS7001FA 1 x 13E2 2x MS6001FA 2 x V64.3A GE Power Systems 217000 6705 38,1 Ansaldo Energia 206000 6618 48,7 Nuovo Pignone 189200 6935 54 1 x MS9001E 121600 70400 183000 6900 60 2 x V64.3 122000 65000 166000 7123 44,2 1 x GT11N2 112000 55000 69100 40100 51380 18460 Siemens AG, Power Generation, Gas Turbines&Plants ABB Alstom Power 107400 6775 51,5 69840 6920 48 1x MS6001FA 2xFT8 66000 6630 50,4 1 x TRENT 50170 15830 GE Power Systems 59800 7390 58 1 x MS6001B 38300 22500 Solar Turbines Incorporated 28700 8175 44 2 x Mars 100 21390 7310 17650 8681 44,1 1 x SB60 12270 5380 9000 8771 41,4 1 x Taurus 70 6890 1970 6600 9288 41 1 x Taurus 60 5200 1850 GE Power Systems MAN Turbomaschinen AG GHH Borsig Rolls-Royce Mitsui Engineering & Shipbuilding Co., Ltd. Solar Turbines Incorporated Solar Turbines Incorporated © Los autores, 2002; © Edicions UPC, 2002. 500 Máquinas térmicas motoras 9.6.5 Alternativa 3: ciclo combinado con turbina de gas La generación de electricidad con turbina de gas y el posterior aprovechamiento térmico de los gases de escape, ya representan por sí solos un sistema de cogeneración. La manera de incorporar una turbina de gas dentro de una instalación de motores alternativos es viable si se consideran las condiciones previas que caracterizan la instalación estudiada. Como el objetivo prioritario es la producción de energía eléctrica, a fin de ver el rango de potencias obtenidas, se tendría que conocer el nivel de inversión que se está dispuesto a hacer. Dependiendo de este nivel de inversión se podrá escoger una turbina de gas u otra. En resumen, como no hay ninguna limitación con la turbina, ya que lo que se hará es mejorar su rendimiento gracias a los motores, a más inversión más potencia generada. En este caso una de las posibles alternativas sería utilizar los gases de escape de los seis motores para calentar el aire de entrada en la cámara de combustión de la turbina de gas. Esta instalación representaría un Ciclo de Brayton con regeneración, donde la regeneración proviene de los gases de escape de los motores. La regeneración de este ciclo también se podría realizar con los gases de escape de la turbina de gas. Una ventaja de esta instalación sería tener la posibilidad de generación de electricidad en caso de una parada de los motores. La utilización del regenerador permite aumentar el rendimiento térmico de la turbina, ya que se reduce el calor que hay que aportar a la cámara de combustión. Esta solución no se considera la más apropiada en el caso de aplicación, ya que el objetivo principal es que los motores alternativos tengan una misión determinante dentro de la instalación. En el caso de regenerador, la energía térmica de los motores sólo permite mejorar el rendimiento térmico de la turbina de gas, sin representar un aumento muy importante de potencia eléctrica. Además, después del regenerador los gases siguen estando a una temperatura muy alta que no se aprovecha, ya que se tendrían que enfriar para tirarlos a la atmósfera. Otra posible solución que parece viable es la de una instalación de turbina de gas con inyección directa de vapor dentro de la cámara de combustión. Como ya se ha dicho, este procedimiento es conocido con el nombre de ciclo Cheng. El vapor es introducido a mediana presión en la cámara de combustión. Así se consigue aumentar la producción de energía eléctrica, ya que se dispone de una mayor cantidad de fluido de trabajo que acciona la turbina sin un consumo adicional por parte del compresor, debido a que este sigue comprimiendo el mismo caudal de aire. La cantidad de vapor añadida es del orden del 15% del caudal de aire. Como resultado, se tienen aumentos en la producción de electricidad de hasta el 50% y una mejora del rendimiento de la turbina, que puede llegar a superar el 35%. Hay que destacar que en este caso la caldera de recuperación sería mucho más pequeña y en consecuencia más barata, ya que se tiene que producir vapor a media presión y no a alta presión como en el caso de ciclo combinado con turbina de vapor, además el caudal de vapor también es muy inferior. Este factor puede compensar el aumento de precio que implica el compresor y la cámara de combustión. Esta caldera se puede diseñar de manera que se puedan aprovechar de forma escalonada todas las posibilidades térmicas del motor: 1. Agua de refrigeración del circuito de alimentación: 45.5 ºC 2. Agua de refrigeración del motor: 82 ºC 3. Gases de escape: 420 ºC © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 501 A fin de aprovechar los gases de escape de la turbina, se ha considerado la posibilidad de calentar el aire de entrada a la cámara de combustión. Con esta regeneración se consigue aumentar el rendimiento térmico de la turbina, y como consecuencia el aumento de energía eléctrica. El esquema de la instalación sería el de la figura 9.18: Alimentación de agua Vapor a media presión Combustible De (#) A atmosfera Regen. A atmosfera Compresor Refrigeración del Motor Gases de escape Motor Alternativo Generador de electricidad Cámara Combustión Turbina gas A (#) Entrada aire Combustible Fig.9.18 Cogeneración con ciclo combinado motor alternativo-turbina de gas con inyección de vapor (ciclo Cheng con regeneración) Otro parámetro a tener en cuenta es la posibilidad de incrementar la potencia eléctrica producida a un nivel superior que con la turbina de vapor. Mientras que con la turbina de vapor la posibilidad de escoger una u otra era muy reducida (aspectos termodinámicos), con las turbinas de gas no pasa esto. A fin de cuantificar el rango de potencias alcanzables hay que ver cuál es la inversión que se quiere realizar, ya que a más inversión, se podrá escoger una turbina mayor. Hay que hacer una consideración sobre el ciclo Cheng. Actualmente hay alrededor de seis instalaciones de este tipo en el mundo. Son instalaciones que ya hace más de cinco años que funcionan, pero que no han dado lugar a la construcción de nuevas. La explicación que dan los expertos en turbinas es que este ciclo hacía aumentar mucho el rendimiento de las primeras turbinas, pero ahora con la gran evolución que han sufrido, su rendimiento aumenta sin necesidad de inyectar vapor. Otro inconveniente es la calidad del agua que hay que utilizar para hacer el vapor, tiene que ser un agua purificada que es muy cara de producir. Otro inconveniente lo representa el no aprovechamiento de los gases de escape de la turbina, ya que como se ha dicho anteriormente después del regenerador los gases tienen una gran cantidad de energía térmica que no se aprovecha. © Los autores, 2002; © Edicions UPC, 2002. 502 Máquinas térmicas motoras En la Tabla 9.9 se relacionan los modelos de tres de las marcas más importantes del sector (ABB Alstom Power, Kawasaki Heavy Industries, Ltd. y Rolls-Royce), cuyas potencias se ajusten más a la instalación (entre 1 y 10MW), mientras que en la tabla 9.8 se muestran todos los modelos de turbinas de gas de la marca Rolls-Royce. Tabla 9.8 )DEULFDQWH 3RW N: N-N:K 5HQG 5HO&RPS NJV 7VDOLGD& 9HO USP Rolls-Royce 3949 12411 29 10.2 15.7 Rolls-Royce 5130 11476 31,4 7.6 34.6 555 14589 Rolls-Royce 5273 11819 30,5 13.5 20.8 528 Rolls-Royce 5320 15538 23,2 7.6 34.6 500 7556/7541 Rolls-Royce 6420 8481 42,4 10.2 18.4 530 14600 Rolls-Royce 6449 11201 32,1 14.6 23.5 530 11571 Rolls-Royce 7918 10921 33 19.4 30.4 488 Rolls-Royce 8540 10820 33,3 10 45.3 7556/7541 Rolls-Royce 8790 13525 26,6 10 45.3 508 7556/7541 Rolls-Royce 8970 13260 27,1 10 45.3 508 7556/7541 Rolls-Royce 9510 12624 28,5 10.5 45.3 506 7556/7541 Rolls-Royce 14580 12762 28,2 8.8 78.5 442 Rolls-Royce 25690 9390 38,3 20 85.3 455 3000/3600 Rolls-Royce 27516 9934 36,2 20.8 91.6 500 4800 Rolls-Royce 28775 9737 37 20.8 94.4 491 4800 Rolls-Royce 29430 9534 37,8 21 94.8 500 4850 Rolls-Royce 30949 9215 39,1 21 92.1 508 4850 Rolls-Royce 51190 8661 41,6 35 159.2 427 3600 Rolls-Royce 51380 9390 38,3 20 170.6 455 3000/3600 7556/7541 14589 11571 5500 9.6.6 Alternativa 4: ciclo combinado con turbina de gas y turbina de vapor y generación de frío por absorción (Trigeneración) Los sistemas de enfriamiento por absorción son cada vez más utilizados en instalaciones de cogeneración. Al ser un caso especial dentro de la producción de vapor, no se habían tratado hasta el punto 9.6 de aplicación a un caso real. A continuación se explican los parámetros básicos dentro de estos sistemas. Los sistemas de enfriamiento por absorción pueden utilizar cualquier tipo de calor residual (vapor, líquido caliente o gas caliente), proporcionando frío para acondicionamiento ambiental o para procesos, incluso a baja temperatura. Los equipos industriales comercializados se pueden accionar por vapor o agua caliente, de tal forma que si el calor residual es un gas, es necesario un intercanviador gas-agua caliente y con circuito intermedio. Son sistemas que se adaptan muy bien en la recuperación de calores residuales, ya que se pueden alcanzar elevados coeficientes de eficiencia con caudales residuales de temperatura relativamente baja. © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 503 Tabla 9.9 )DEULFDQWH ABB Alstom Power ABB Alstom Power ABB Alstom Power ABB Alstom Power ABB Alstom Power ABB Alstom Power ABB Alstom Power ABB Alstom Power Kawasaki Heavy Industries, Ltd. Kawasaki Heavy Industries, Ltd. Kawasaki Heavy Industries, Ltd. Kawasaki Heavy Industries, Ltd. Kawasaki Heavy Industries, Ltd. Kawasaki Heavy Industries, Ltd. Kawasaki Heavy Industries, Ltd. Kawasaki Heavy Industries, Ltd. Kawasaki Heavy Industries, Ltd. 3RW N: N-N:K 5HQG 5HO&RPS NJV 7VDOLGD& 9HO USP 3942 13566 26,5 7.82 21.18 488 1500 4348 11998 30 12.91 17.65 528 1500 4697 11932 30,2 14.14 19.04 525 1500 5046 11915 30,2 14.32 19.55 546 1500 5252 11925 30,2 15.35 20.34 537 1500 6441 11579 31,1 11.85 28.15 471 1500 6750 11418 31,5 12.34 29.28 466 1500 7710 11886 30,3 13.97 29.8 545 1500 1550 14120 25,5 9.4 8.1 518 1500/1800 1550 14260 25,2 9.5 8 529 1500/1800 3050 14350 25,1 9.4 16.2 518 1500/1800 3050 14490 24,8 9.5 16 529 1500/1800 5860 11770 30,6 13 21.8 560 1500/1800 5960 11610 31 12.7 22 560 1500/1800 6690 10710 33,6 12.7 22.2 533 1500/1800 6960 11500 31,3 15.9 27 517 1500/1800 7100 11430 31,5 15.9 27.1 525 1500/1800 Rolls-Royce 3949 12411 29 10.2 15.7 555 Rolls-Royce 5130 11476 31,4 7.6 34.6 Rolls-Royce 5273 11819 30,5 13.5 20.8 528 Rolls-Royce 5320 15538 23,2 7.6 34.6 500 7556/7541 Rolls-Royce 6420 8481 42,4 10.2 18.4 530 14600 Rolls-Royce 6449 11201 32,1 14.6 23.5 530 11571 Rolls-Royce 7918 10921 33 19.4 30.4 488 11571 Rolls-Royce 8540 10820 33,3 10 45.3 7556/7541 Rolls-Royce 8790 13525 26,6 10 45.3 508 7556/7541 Rolls-Royce 8970 13260 27,1 10 45.3 508 7556/7541 Rolls-Royce 9510 12624 28,5 10.5 45.3 506 7556/7541 © Los autores, 2002; © Edicions UPC, 2002. 14589 7556/7541 14589 504 Máquinas térmicas motoras Hace unos años que este tipo de equipos perdieron parte del mercado en beneficio de los frigoríficos de compresión o de las bombas de calor. En la actualidad vuelven a ser muy utilizados debido a las posibilidades que representa su instalación en equipos de cogeneración. Los dos únicos tipos que se comercializan son los que utilizan agua/bromuro de litio o bien la mezcla de amoníaco/agua. Los primeros se utilizan para el acondicionamiento del aire, o bien, para enfriamiento de procesos en los cuales la temperatura está entre los 5 y los 10ºC. Estos sistemas pueden ser accionados por caudales residuales de temperaturas tan bajas como 70ºC o vapor a baja presión. En el caso de caudales gaseosos se necesitan temperaturas mínimas de 250ºC, debido a la necesidad del circuito intermedio de agua caliente, diseñado para generar agua caliente a unos 120ºC. Los sistemas agua/ amoníaco se utilizan para la producción de frío a bajas temperaturas (hasta a 40ºC). En el caso práctico que se está estudiando, la aplicación de una máquina de generación de frío por absorción estaría destinada a enfriar el aire de entrada al compresor de la turbina de gas. Cuanto más frío entre este aire más alto será el rendimiento de la turbina de gas y en consecuencia el rendimiento de la instalación aumenta. Se establece como criterio conseguir una temperatura de entrada de aire constante durante todo el año de 10ºC. Esta es la temperatura mínima recomendable, ya que a temperaturas inferiores el aire puede llegar a condensar en la entrada del compresor, formando pequeñas gotas que pueden llegar a agujerear los álabes del compresor. La primera posibilidad que se contempla es la que se puede ver en la figura 9.19. El aspecto más relevante de esta instalación es la caldera de recuperación. Esta caldera está dividida en dos partes, a una de ellas van todos los gases de escape de los seis motores alternativos y a la otra todos los gases de escape de la turbina de gas. La instalación está diseñada para funcionar a régimen continuo con las dos turbinas, y una cierta parte del día con los motores alternativos. Cuando los motores trabajen, los gases de escape irán a la caldera de recuperación para producir vapor para hacer funcionar la máquina de absorción que servirá para enfriar el aire de entrada al compresor de la turbina de gas, de esta manera se puede llegar a un rendimiento global de la instalación del 50%. Cuando los motores estén parados, la máquina de absorción estará parada y el aire entrará en el compresor a temperatura ambiente, con lo cual el rendimiento de la turbina de gas será inferior, pero se seguirá generando electricidad con unos rendimientos óptimos. La parte inferior de la caldera es una caldera de recuperación, que con los gases de escape de la turbina de gas genera vapor a alta presión para después llevarlos hacia la turbina de vapor de condensación. El inconveniente que tiene este diseño es que si se calcula, con todos los gases de escape de los motores se genera una cantidad de frío que, para aprovecharlo completamente, requiere una turbina de entre 60 y 75 MW; por tanto esta posibilidad no es la mejor, ya que se sale del orden de magnitud de las potencias con las que se estaba trabajando. Otra opción es partir de una turbina de gas concreta y sus características. Una vez se tiene el caudal de aire necesario para la turbina escogida se calcula la cantidad de frío que hace falta para tener una entrada constante durante todo el año a 10ºC; una vez se tiene este dato. ya se puede buscar la máquina de absorción y la cantidad de vapor que necesita. Si se calcula con una turbina de gas de 4.55 MW se llega a la conclusión de que con una extracción en la turbina de vapor se tendría suficiente vapor para hacer funcionar la máquina de absorción. © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 505 Refrigeración de los motores Gases de escape Motores Gases de escape de los seis motores Combustible Combustible Gases de escape de la turbina Cámara Combustión Compresor Turbina gas Turbina vapor Extracción de vapor )5Ë2 Máquina Absorció N Entrada aire Condensador Agua de alimentación Precalentamiento del agua con la energía térmica de la refrigeración de los motores Fig. 9.19 Cogeneración con ciclo combinado motor alternativo turbina de gas turbina de vapor con máquina de absorción con todos los gases de escape de los motores alternativos © Los autores, 2002; © Edicions UPC, 2002. 506 Máquinas térmicas motoras En caso de que la instalación se tenga que hacer en un lugar donde en invierno siempre se esté a menos de 10ºC, la máquina de absorción se programará para funcionar sólo cuando esta temperatura sea superior. La turbina de vapor se escogerá en función de los gases de escape de los motores, de los de la turbina de gas y de la caldera de recuperación que se diseñe. En este caso el esquema de la instalación sería el de la figura 9.20: Refrigeración de los motore s Motores Gases de escape Frío hacia el intercambiador de entrada al compresor Máquina Absorción Gases de escape de los seis motores Frío de retorno del intercambiador de entrada al compresor Combustible Gases de escape Entrada aire )5Ë2 Gases de escape de la turbina Combustible Turbina vapor Cámara Combustión Compresor Turbina gas Condensador Agua de alimentación Prescalentamiento del agua con la energía térmica de la refrigeración de los motores Fig. 9.20 Cogeneración con ciclo combinado motor alternativo turbina de gas turbina de vapor con máquina de absorción con extracción de la turbina de vapor © Los autores, 2002; © Edicions UPC, 2002. 9 Cogeneración 507 Este tipo de instalación es el que puede dar un rendimiento global más alto (como se ha dicho antes, pude llegar al 45-50%) y en la cual se aprovecha al máximo la energía térmica de los procesos. 9.6.7 Comparación de las diferentes alternativas Para la comparación de las diferentes alternativas utilizaremos el parámetro de beneficios mensuales que supone el incremento de potencia y el tiempo, en años, que se necesita para recuperar la inversión en las condiciones actuales. Se considera que la electricidad generada sin coste de combustible (electricidad generada para cogenerfación) implica un beneficio correspondiente al de la energía producida. Para la electricidad generada a partir del consumo de combustibles hay que obtener su beneficio en base a la ganancia calculada descontando el coste del combustible. Por lo tanto, los ciclos con mayor rendimiento tienen un beneficio por kW superior a igual combustible. Los datos más destacables de cara a decidir un sistema u otro se reflejan en la tabla 9.10 Tabla 9.10 ,QVWDODFLyQ Turbina vapor (P=40 bar / T=400ºC) Turbina vapor (P=12 bar / T=230ºC) Turbina vapor (P=20 bar / T=250ºC) Motor Diesel 5MW + Turbina vapor Turbuna gas 5MW + Turbina vapor Turbina gas 5MW - Ciclo Cheng Turbina gas 5MW Regeneración Coste Beneficio Tiempo de PVP Ganancia Ganancia Potencia Potencia Potencia horas días Gasoil Gas instalación (MPTA retorno Electricidad (PTA/kWh) (PTA/kWh) Cog. /día /mes (kW) (kW) (MPTA) /mes) (PTA/kWh) Gasoil Gas (kW) (años) 6 30 15 6 5 845 220 2,28 8,04 6 30 15 6 5 714 175 1,93 7,56 6 30 15 6 5 773 190 2,08 7,59 6 30 15 6 5 1200 450 8,64 4,34 6 30 15 6 5 1200 5000 500 7,74 5,38 6 30 15 6 5 0 5000 350 5,4 5,4 6 30 15 6 6 0 5000 300 5,4 4,63 5000 Por las peculiaridades de cada sistema y por los datos que se obtienen respecto la inversión se considera que: Cualquiera de las tres alternativas que aplican únicamente una turbina de vapor recuperan la inversión al cabo de almenos siete años y medio, lo que supone un tiempo excesivo. Esto está provocado por un coste notable y una potencia limitada. © Los autores, 2002; © Edicions UPC, 2002. 508 Máquinas térmicas motoras La alternativa de ampliar la planta mediante un motor Diesel y añadiendo una turbina de vapor permite recuperar la inversión en 4.3 años, ya que la potencia generada es grande y la turbina de vapor es más rentable. No obstante, esta opción supone una inversión muy importante. La alternativa de ampliar la planta mediante una turbina de gas tiene varias desventajas respecto el motor Diesel, como son un coste mayor, un rendimiento menor y una potencia eléctrica también menor. Las dos opciontes de optimizar una turbina de gas, ya sea a través de un ciclo Cheng o de la regeneración, representan una inversión todavía muy importante, pero menor que para un motor diesel con turbina de vapor. No obstante, se tardaría más tiempo a recuperar la inversión y la potencia generada es menor. Por otro lado, esta tecnología no está muy desarrollada. Un aspecto muy importante a tener en cuenta es que en las alternativas se basan en una ampliación de la planta del 40%, con un nivel de inversión muy alto y que no siempre se puede estar dispuesto a realizar. © Los autores, 2002; © Edicions UPC, 2002. 10 Pilas de combustible 509 10 Pilas de combustible 10.1 Introducción Las pilas de combustible transforman la energía química de un combustible directamente en corriente eléctrica, obteniendo en la mayoría de tipos de pilas agua como residuo, con lo que el sistema no resulta contaminante. Aunque utilizan combustibles similares al de los motores térmicos, las pilas de combustible no son motores térmicos, ya que el proceso no es térmico, sino electroquímico. Sin embargo, aparecen en el marco tecnológico actual como la principal alternativa a los motores térmicos. Su funcionamiento es muy parecido al de las baterías convencionales; sin embargo, la diferencia estriba en que mientras las baterías son un depósito de energía química que pueden transformar en corriente eléctrica, las pilas de combustible son sólo transformadores, es decir, requieren un depósito asociado con combustible. Esto significa que la autonomía de las pilas de combustible no está limitada a su tamaño, sino a la capacidad del depósito, igual que un motor térmico. El tamaño de la pila de combustible o el número de celdas de que disponga afectará a la potencia del sistema, de un modo equivalente al caso de un motor térmico con más o menos cilindrada. En general, el combustible utilizado es el hidrógeno, dada su alta densidad de energía, alta reactividad y la posibilidad de obtenerse a partir de hidrocarburos o del agua. Por lo tanto, este sistema permite una diversificación de las fuentes de energía, ya que no depende exclusivamente de los combustibles fósiles. Actualmente la energía eléctrica se transporta largas distancias mediante líneas de alta tensión, asumiendo unas ciertas pérdidas. Aun así, estas distancias se encuentran limitadas, dado que si no estas pérdidas podrían ser excesivas. Esto obliga a generar la energía eléctrica relativamente cerca del consumidor de esta energía. En cambio, el hidrógeno se puede transportar a largas distancias sin pérdidas importantes. Se plantea aprovechar esto para generar hidrógeno donde fuera más sencillo, económico y/o ecológico y luego transportar el hidrógeno hasta una estación de pilas de combustible que transformara el hidrógeno en electricidad cerca del consumidor final, o bien, directamente al consumidor final si este dispusiera de pilas de combustible. El rendimiento de las pilas de combustible se mantiene prácticamente constante sea cual sea la carga, mientras que los motores térmicos dependen de forma muy importante del régimen de trabajo y de la carga. © Los autores, 2002; © Edicions UPC, 2002. 510 Máquinas térmicas motoras Los motores térmicos presentan rendimientos máximos entre un 40 y un 50%. Sin embargo, su uso en aplicaciones no estacionarias como son los automóviles implican una caída del rendimiento que lo puede situar por debajo del 10%. Las pilas de combustible presentan un rendimiento desde un 35% hasta un 50%, llegándose al 70% aprovechando los gases de salida a alta temperatura. Pero, además, estos rendimientos se mantienen a cargas parciales. Por otro lado, las pilas de combustible no se encuentran limitadas por la temperatura, ya que el rendimiento puede ser muy alto trabajando a temperaturas bajas. Esto no sucede en los motores térmicos, cuyo rendimiento depende directamente del salto térmico que se produzca en el ciclo. Esto elimina la problemática de materiales que implica trabajar a altas temperaturas para lograr rendimientos altos. No obstante, las pilas de combustible, sin estar condicionadas por la temperatura, no pueden alcanzar un rendimiento del 100%, sino que también se encuentran limitadas a nivel teórico. La primera pila de combustible fue fabricada en 1839 por William Grove. Consistía en dos barras de platino rodeadas por tubos que contenían hidrógeno y oxígeno respectivamente y sumergidas en un electrolito ácido. Esta pila sería el prototipo para las PAFC (Phosphoric Acid Fuel Cells). Sin embargo, las prestaciones de la pila eran limitadas, y tampoco existía una aplicación práctica para el invento, de manera que no se realizaron esfuerzos importantes de investigación en este tema hasta 1932. Ese año Francis Bacon presentó un pila de combustible que usaba hidrógeno, oxígeno, un electrolito alcalino y electrodos de níquel. El comportamiento de esta pila fue esperanzador, y en 1952, Bacon y colaboradores presentaron una pila de combustible de 5 kW. Pero fue a finales de los años 50 cuando se produjo un mayor avance. La NASA necesitaba sistemas compactos para generar electricidad para las misiones espaciales. La energía nuclear era considerada peligrosa, las baterías eran pesadas y la energía solar muy cara e incómoda. Se decidió desarrollar pilas de combustible, que demostraron su viabilidad en diferentes misiones, habiéndose utilizado desde entonces pilas alcalinas y de electrolito polimérico. Además de electricidad, también se generaba agua potable para la tripulación. Existen actualmente diferentes tipos de pilas de combustible. Cada tipo corresponde a una gama de potencias y tamaños, con un rendimiento asociado y, por lo tanto, aplicaciones específicas. Los problemas de la contaminación, de la dependencia del petróleo y el interés por mejorar la eficiencia de los procesos de transformación energética han generalizado el interés por las pilas de combustibles como generadores estacionarios y como sistemas de generación para el transporte. Importantes empresas del sector de la energía están invirtiendo en el desarrollo de las pilas de combustible y se espera que en pocos años su uso sea habitual. Su aplicación se extenderá cuando el coste de las pilas de combustible sea competitivo en el mercado. 10.2 Principios de funcionamiento Las pilas de combustible disponen de un ánodo, al que se suministra combustible, y un cátodo al que se suministra un oxidante. En estos electrodos se produce una reacción electroquímica de la que se obtiene electricidad y agua. Las reacciones electroquímicas se dividen en dos semireacciones, la reacción de oxidación, que tiene lugar en el ánodo, y la reacción de reducción, que tiene lugar en el cátodo. © Los autores, 2002; © Edicions UPC, 2002. 10 Pilas de combustible 511 H &RPEXVWLEOH 2[tJHQR + Catalizador Electrolito Ánodo poroso Cátodo poroso 3URGXFWR+2&DORU Fig.10.1 Esquema general de una pila de combustible Los dos electrodos, ánodo y cátodo, se encuentran separados por una capa de electrolito, que también hace de membrana, evitando que combustible y comburente entren en contacto directo, que podría resultar peligroso. En la reacción de oxidación el hidrógeno gaseoso produce iones de hidrógeno (carga positiva) al liberar electrones. Estos iones viajan a través de la membrana hacia el cátodo, mientras que los electrones viajan hacia el cátodo también, pero por un circuito externo que dispone de una carga eléctrica, que consume la potencia generada por la celda. Para favorecer esta reacción se usan los catalizadores, substancias que participan en la reacción favoreciendo el proceso, pero que no se consumen. En primer lugar el elemento que forma el catalizador disocia la molécula de hidrógeno en dos átomos de hidrógeno, que se adhieren a dos átomos del catalizador. Posteriormente se produce la liberación de un electrón de cada uno de los átomos para que se produzca la formación del ión hidrógeno. En la segunda reacción, la reacción de reducción, el oxígeno suministrado por el flujo de aire a través del cátodo se combina con los iones de hidrógeno formando como productos finales agua y calor. En esta reacción también se usa un catalizador que facilita el proceso. © Los autores, 2002; © Edicions UPC, 2002. 512 Máquinas térmicas motoras 10.2.1 Electrodos Las funciones principales de los electrodos son las siguientes: - Suministrar una superficie donde tengan lugar las reacciones de oxidación y reducción. - Conducir los iones hacia la interficie de las tres fases, reactante, electrolito y catalizador, una vez se hayan formado. - Suministrar una barrera física que separe la fase gas del electrolito. A partir de estas funciones se puede determinar que los electrodos deben ser de material catalítico, conductivo y poroso. La función catalítica sólo es importante a temperaturas bajas, debido a que a alta temperatura las reacciones se producen rápidamente sin necesidad de catalizador. Los electrodos deben ser permeables tanto al electrolito como a los gases, ya que una mala permeabilidad puede provocar la inundación por el electrolito o bien el secado por el gas. En el primer caso se produciría una restricción en el transporte de las especies gaseosas en los puntos de reacción, lo que reduciría la producción del electrodo. 10.2.2 Membrana-Electrolito El electrolito conduce la carga iónica entre los electrodos, completando el circuito eléctrico de la celda. La membrana suministra una barrera física para prevenir la mezcla directa del combustible y el flujo de gas oxidante, que en caso de mezcla resultaría muy peligroso. El conjunto de ánodo y electrodo se conoce como MEA (Membrane Electrode Assembly). 10.2.3 Capa de apoyo Esta capa está diseñada para maximizar la corriente que se puede obtener de la MEA. Están colocadas una al lado de cada electrodo y están hechas de papel poroso de carbón con un espesor que se encuentra entre las 100 y las 300 micras. Su naturaleza porosa consigue una difusión muy efectiva de cada uno de los reactivos en el catalizador. Además su estructura permite la propagación del gas cuando este penetra en la capa. Esta capa también asiste en la gestión del agua durante la operación de la celda, ya que una cantidad incorrecta de agua, ya sea por exceso como por defecto, puede provocar problemas en las operaciones de la celda. 10.3 Prestaciones Para determinar el funcionamiento real de una pila se debe determinar primero su funcionamiento ideal y luego las pérdidas que sufre. Existen unas ecuaciones, las ecuaciones de Nernst (Tabla 10.1), que permiten determinar el funcionamiento ideal de la pila, encontrando el valor del voltaje teórico para determinadas condiciones de trabajo. Las © Los autores, 2002; © Edicions UPC, 2002. 10 Pilas de combustible 513 variables que afectan a este voltaje ideal son la temperatura y la presión de trabajo y la composición de los gases, tanto del combustible como del comburente. El funcionamiento ideal de una celda depende de las reacciones electroquímicas que se producen con los diferentes combustibles y con el oxígeno. Es decir, las distintas tipologías de pilas presentan un funcionamiento ideal diferente. A continuación se calculan las pérdidas, que son por tres tipos de polarización: polarización por activación, polarización óhmica y polarización por concentración. Para calcular el rendimiento ideal se utiliza el concepto de energía libre de Gibbs y de entalpía, y para calcular el rendimiento real, se utiliza el redimiento ideal y se compara el voltaje ideal con el real. 10.3.1 Cálculo de prestaciones ideales Cada electrodo tiene un potencial diferente del de la tierra (cero por convenio) y la FEM de la pila será la diferencia entre los potenciales de los electrodos. A partir de la teoría de Nernst de la presión de disolución electrolítica se pueden determinar estos potenciales electródicos. Esta presión de disolución es la tendencia de un metal a desprender iones en una solución. A la presión de disolución se opone la presión osmótica de los iones de la solución, que tienden a depositarse de nuevo sobre el metal. El efecto de la concentración iónica sobre el potencial electródico, en voltios, viene dado, según Nernst, por la ecuación siguiente: E = (RT/yF) (ln p/P) (10.1) Donde p es la presión osmótica del ión, P la presión de disolución del metal, R la constante de los gases, T la temperatura absoluta, F= 1 Faraday, y y la valencia del ión. Tabla 10.1 Reacciones en una pila de combustible y las ecuaciones de Nernst correspondientes. (a) ánodo y (c) cátodo 5HDFFLRQHV H 2 + ½ O 2 → H 2O (FXDFLyQGH1HUQVW E = E 0+(RT/2F) ln[P H2/P H2O ]+(RT/2F) ln[P 1/2O2] 0 1/2 H 2 + ½ O 2 + CO 2 (c) → E = E +(RT/2F) ln[P H2/P H2O P CO2]+(RT/2F) ln[P O2PCO2] H 2O + CO 2 (a) CO + ½ O 2 → CO 2 E = E 0+(RT/2F) ln[PCO /P CO2]+(RT/2F) ln[P1/2O2] 0 2 2 CH 4 + 2O 2 → 2H2O + CO 2 E = E +(RT/8F) ln[PCH4 / P H2O PCO2]+(RT/8F) ln[P O2] © Los autores, 2002; © Edicions UPC, 2002. 514 Máquinas térmicas motoras Desarrollando esta expresión para las distintas reacciones que tienen lugar en las diferentes pilas de combustible, se obtienen las expresiones de la tabla 10.1, donde E0 es el potencial estándar (1 atm, 25°C) para una concentración igual a 1. El potencial estándar ideal de una reacción H2/O2 es de 1,229 V (este valor se muestra en los textos referentes a electroquímica como el potencial de oxidación del H2). Este potencial ideal para esta reacción decrece con la temperatura. 10.3.2 Cálculo de las pérdidas Se consideran tres tipos de pérdidas en las celdas: - Polarización por activación - Polarización óhmica - Polarización por concentración En la figura 10.2 se muestran las condiciones de cada una de estas pérdidas por polarización. Voltaje (V) Voltaje ideal Polarización por activación Pérdida total Polarización óhmica Polarización por concentración 2 Densidad de corriente (mA/mm ) Fig.10.2 Voltaje ideal y real respecto la densidad de corriente Estas pérdidas determinan el voltaje real del sistema, que viene definido por: V=E-Pérdidas (10.2) Conviene incrementar el potencial del ánodo y disminuir el del cátodo, para lograr una diferencia de potencial lo mayor posible. Sin embargo, las pérdidas afectan de manera que el potencial en cada electrodo es el teórico menos las pérdidas en el electrodo: Velectrodo = Eelectrodo ± helectrodo © Los autores, 2002; © Edicions UPC, 2002. (10.3) 10 Pilas de combustible 515 siendo helectrodo la suma de las pérdidas por activación y por concentración. Por lo tanto, el voltaje de la celda quedará según la expresión siguiente: Vcelda = Vcátodo Vánodo hóhmica (10.4) Y desarrollándola: Vcelda = Ecátodo Eánodo - hcátodo +hánodo - hóhmica (10.5) 1. Polarización por activación Este fenómeno se produce cuando el índice de la reacción electroquímica en la superficie del electrodo está controlado por la cinética de éste. Cuando hay una baja densidad de corriente, estas pérdidas son las que predominan. Este tipo de pérdida expresa el descenso del voltaje a partir de una ecuación semiempírica denominada de Tafel: h = (RT / anF) x ln (i/io) (10.6) donde a es el coeficiente de transferencia de los electrones de la reacción en el electrodo mientras que el valor de io es el intercambio de densidad de corriente. 2. Polarización óhmica Se trata de la resistencia del flujo de iones en el electrolito y la resistencia de los electrones a través de los materiales de los electrodos. Las pérdidas en el electrodo se reducen por la disminución de la separación del electrodo y aumentando la conductividad iónica del electrolito. Ambos, tanto el electrodo como el electrolito, obedecen la ley de Ohm, por lo que las pérdida vienen descritas por la siguiente expresión: P=RxI (10.7) Donde I es el flujo de corriente a través de la celda y R es la resistencia total de la celda, incluyendo la electrónica, iónica y la resistencia de contacto. Estas pérdidas son proporcionales a la corriente, por lo que aumentan al incrementar la intensidad de corriente. 3. Polarización por concentración Debido a que el reactivo es consumido en el electrodo por la reacción electroquímica existe una pérdida de potencial por a la incapacidad del material de alrededor de mantener la concentración inicial del volumen de fluido, es decir, se forma un gradiente de concentración. © Los autores, 2002; © Edicions UPC, 2002. 516 Máquinas térmicas motoras A este problema pueden contribuir diversos procesos como son: - Lenta difusión en la fase gas en los poros de los electrodos. - Solución o disolución de los reactivos o productos dentro o fuera del electrolito. - Difusión de los reactivos o productos a través del electrolito del lugar de la reacción oxidante al lugar de reacción reductora. Este fenómeno se puede describir mediante la siguiente expresión: h = (RT / nt) ln (1-i/il) (10.8) donde i es el índice de transporte de masa en la superficie del electrodo y il es la medida del índice máximo en que un reactivo puede ser administrado al electrodo. Operando con los valores de i y de il obtenemos la siguiente relación, donde Cs es la concentración superficial y Cb el volumen de concentración: Cs/Cb = 1 i/il (10.9) La ecuación de Nernst para las especies reactivas en condiciones de equilibrio o cuando no hay corriente fluyendo es la siguiente: Ei = 0 = Eo + (RT/nF) ln Cb (10.10) Cuando la corriente fluye, la concentración superficial es menor que el volumen de concentración y la ecuación de Nernst se transforma en la siguiente: E = Eo + (RT/nF) ln Cs (10.11) La diferencia de potencial DE producida por el cambio de concentración en los electrodos es la llamada concentración de polarización: h = (RT / nt) ln (Cs/Cb) (10.12) A partir de esta ecuación y sabiendo la relación existente entre Cs y Cb se obtiene la expresión 10.7. En este análisis de la polarización por concentración, la hipótesis inicial es que la polarización por activación se mantiene negligible. La reacción de transferencia de carga tiene un alto intercambio de densidad de corriente que hace que la polarización por activación sea negligible en comparación con la polarización por concentración. 10.3.3 Variables en el comportamiento de una pila de combustible 1. Temperatura y presión El funcionamiento de las celdas se ve afectado por las variables de operación (temperatura, presión, composición de los gases, reactivos utilizados y densidad de corriente) y por otros factores (impurezas, ciclo de vida) que influyen en el potencial ideal de la celda y en las pérdidas de voltaje descritas anteriormente. © Los autores, 2002; © Edicions UPC, 2002. 10 Pilas de combustible 517 Algunos parámetros afectan de forma positiva en un sentido y negativa en otro. Un ejemplo lo es la densidad de corriente, que puede aumentarse para lograr una pila menor, pero esto implica una disminución del voltaje, afectando también al rendimiento. Por lo tanto, es importante adecuar los parámetros a la aplicación que se dará a la pila. Por otro lado, modificar ciertos parámetros puede hacer más eficiente la pila pero puede generar costes asociados que se deben valorar, como puede ser el aumento de presión de los gases. La influencia de la presión y la temperatura sobre el comportamiento de la celda se analiza mediante la variación de la energía libre de Gibs, DG. Esta variación viene determinada por la derivada de esta variable en función de ola temperatura y presión, obteniendo las siguientes expresiones: (dE/dT)p = DS/nF (dE/dp)T = - DV/nF (10.13) (10.14) Debido a que la variación de la entropía para la reacción H2/O2 es negativa, el potencial para dicha reacción disminuye con un incremento de la temperatura. Un incremento de la temperatura es beneficioso para el funcionamiento de la celda, ya que incrementa el índice de la reacción, baja la resistencia de la celda presentando una conductividad iónica en el electrolito mayor y presenta un mayor índice de transferencia de masa. Pero este incremento de temperatura también presenta algunos problemas en los componentes de la celda. En el ánodo los problemas están relacionados con el material, ya que se produce corrosión, mientras que el electrolito presenta problemas de degradación y pérdidas por evaporación. Finalmente, los catalizadores presentan problemas de recristalización. Por otra parte, al aumentar la presión mejoran aspectos como la solubilidad del gas y un aumento en los índices de transferencia de la masa, además de paliar el problema de la evaporación en el electrolito. Por lo tanto, aumenta la eficiencia de la celda. Sin embargo, aumentar la presión también implica problemas de materiales, de fugas, de resistencia, de deposición de carbono, etc. En conclusión, los parámetros temperatura y presión mejoran el rendimiento de la pila al aumentar su valor, pero implican problemas tecnológicos importantes, que deben valorarse. 2. Composición de los gases Los reactantes utilizados y su composición tienen un gran impacto sobre el comportamiento de la celda. De las expresiones de Nernst de la tabla 10.1 se deduce que las pilas con mayor concentración de combustible y oxidante produce un mayor voltaje. La modificación de la composición del gas entre la entrada y la salida significa una reducción del voltaje debido a que el potencial del electrodo queda determinado por el menor potencial para las diferentes composiciones del gas, dado que los electrodos son superficies equipotenciales. Cambios en la composición del gas afectan más a alta temperatura que a baja temperatura. 10.3.4 Rendimiento La eficiencia térmica se define como la suma de la energía producida relativa al cambio en la energía química almacenada que ocurre cuando el combustible reacciona con el oxidante. © Los autores, 2002; © Edicions UPC, 2002. 518 Máquinas térmicas motoras La siguiente expresión lo resume: h = E / DH (10.15) En el caso de un convertidor electroquímico, como es el caso de una pila de combustible, la energía libre de Gibbs es la energía disponible a la temperatura a la que se produce la conversión. Por lo tanto, su eficiencia ideal viene determinada por la siguiente ecuación: h = DG / DH (10.16) La relación entre DG y DH viene dada por la expresión: DG = DH - TDS. Es decir, asociada a toda reacción se produce una variación de entropia en el sistema que se traduce en calor al medio. Dado que la reacción electroquímica no puede aprovechar este calor para generar trabajo, el rendimiento máximo teórico se encuentra acotado por este concepto. Trabajando con los valores estándar (T= 298 K y p = 1 atm) para la reacción H2/O2 se obtienen los siguientes valores: DH = DHo = 286 kJ/mol DG = DGo = 2373 kJ/mol (10.17) Una vez obtenidos estos valores se puede obtener la eficiencia térmica de una celda que trabaja con combustible ideal y que opera de forma reversible con hidrógeno puro y oxígeno en condiciones estándar. El rendimiento de una pila ideal trabajando a 25ºC y 1 atm de presión es de 083. El rendimiento de una pila real corresponde a la siguiente expresión: h = 083 (Vreal/Videal) (10.18) Considerando que Videal para una pila de oxígeno y hidrógeno puros en condiciones estándar es de 1,229V, el rendimiento será: h = 0675 Vreal (10.19) Como se ha visto anteriormente, disminuyendo la densidad de corriente aumenta el voltaje. Por lo tanto, aumentará el rendimiento. Este aspecto implica que la pila presente un mejor rendimiento trabajando a cargas parciales. En comparación con los motores térmicos, las pilas de combustible no se encuentran limitadas por la temperatura, como los motores térmicos. Esta libertad respecto límites térmicos evita problemas de temperatura en los materiales al buscar mayores eficiencias. 10.4 Tipos de pilas de combustible Las pilas de combustible se clasifican habitualmente por el tipo de electrolito usado. Los tipos que actualmente se desarrollan son los siguientes: - Pilas alcalinas (AFC)) Pilas de membrana polimérica (PEM) Pilas de ácido fosfórico (PAFC) Pilas de carbonato fundido (MCFC) Pilas de óxido sólido (SOFC) © Los autores, 2002; © Edicions UPC, 2002. 10 Pilas de combustible 519 Las reacciones que tienen lugar en cada electrodo no son idénticas para todos los tipos de pila, de manera que a continuación se analizarán de forma independiente. 10.4.1 Pilas alcalinas (AFC) Estas pilas disponen de electrolito alcalino. Las reacciones que tienen lugar en el ánodo, el cátodo y la global de la pila son las siguientes: Á nodo: H 2 + 2 (O H ) - → 2 H 2 O + 2 e - (1 0 .2 0 ) C á to d o : ½ O 2 + H 2 O + 2 e - → 2 (O H ) - (1 0 .2 1 ) H 2 + ½ O 2 → H 2O (1 0 .2 2 ) P ila : Las principales ventajas de este tipo de pilas reside en que la reducción del oxígeno es más rápida, a temperatura ambiente, en electrolitos alcalinos que en electrolitos ácidos y que ven el material de los electrocatalizadores no tiene que ser un material noble. Sin embargo, los electrolitos alcalinos como el NaOH o el KOH reaccionan con el CO2 para formar precipitado de carbono. Por lo tanto, requiere la utilización exclusiva de H2 y O2. Por este motivo sus aplicaciones principales se reducen a la industria aerospacial y defensa. Un esquema de los componentes de la celda se muestra en la figura 10.3. H H + 2 + Electrolito alcalino o ò2 + 2H + 2+ + 2H 3URGXFWR+ 2&DORU Fig. 10.3 Esquema de una pila alcalina © Los autores, 2002; © Edicions UPC, 2002. o 2+ 520 Máquinas térmicas motoras 1. Electrodos Los ánodos se utilizan habitualmente níquel, mientras que los cátodos utilizan catalizadores basados en plata. Los requerimientos para los electrodos son los siguientes: - Elevada conductividad óhmica para reducir las pérdidas por este concepto Adecuada porosidad y estabilidad mecánica Estabilidad química frente el electrolito alcalino Estabilidad electroquímica con el tiempo Comportamiento hidrofóbico Las empresas que desarrollan estas pilas utilizan diferentes tecnologías para cubrir estos requerimientos. 2. Electrolitos El electrolito alcalino más habitual es una solución acuosa de KOH. En algunos casos el electrolito es bombeado por la pila, de manera que se encuentra en movimiento. Otra alternativa, más compleja, consiste en contener el electrolito en una matriz. El NaOH también se utiliza como electrolito, aunque siendo algo más barato, presenta una vida menor y unas prestaciones inferiores a las del KOH. 3. Influencia de la presión Un incremento de la presión tiene efectos positivos en cuanto al rendimiento y en cuanto la compacidad de la pila. Sin embargo, un exceso de presión implica un refuerzo mecánico pesado, y riesgo de que el gas tenga una presión más elevada que la que puede soportar el electrodo y se mezclara con el electrolito, alterando el funcionamiento de la pila. Además, podría llegar a producirse una mezcla del combustible con el oxidante con riesgo de explosión. 4. Influencia de la temperatura Entre la temperatura ambiente y los 60°C aproximadamente el rendimiento de una pila de combustible alcalina aumenta linealmente con la temperatura. Sin embargo, por encima de esta temperatura otros parámetros como la concentración del electrolito afectan más que la temperatura sobre el rendimiento de la pila. 5. Extracción del agua El agua generada en el proceso electroquímico debe ser evacuada para evitar una alteración de la concentración del electrolito. Algunas pilas extraen el agua en forma de vapor a través de los electrodos. Utilizan el flujo de aire o de hidrógeno y fuera de la pila el vapor es condensado y separado del gas. En el caso de electrolito circulante, el electrolito mezclado con agua se hace circular a través de un evaporador o regenerador que elimina el agua y retorna a la pila el electrolito con la concentración adecuada. © Los autores, 2002; © Edicions UPC, 2002. 10 Pilas de combustible 521 6. Refrigeración En el caso de electrolito circulante este proceso puede realizarse mediante la refrigeración del electrolito cuando este se encuentra fuera de la pila. 10.4.2 Pilas de membrana polimérica (PEM) Las PEM disponen de un electrolito formado por una membrana polimérica o Proton Exchange Membrane. El polímero utilizado habitualmente es el ácido poliperfluorosulfónico. Estas pilas se empezaron a desarrollar a principio de los años 60. Ofrecen una alta densidad de potencia, un arranque rápido y respuestas inmediatas a los cambios de la demanda de potencia. Sin embargo, no toleran la contaminación del monóxido de carbono y presenta unos niveles bajos de eficiencia respecto a otros tipos de pilas de combustible. Las reacciones que tienen lugar en el ánodo, el cátodo y la global de la pila son las siguientes: Ánodo: Cátodo: Pila: H2 → 2H+ + 2e½ O2 + 2H+ + 2e- → H2O H2 + ½ O2 → H2O (10.23) (10.24) (10.25) La estructura de estas pilas se presenta en la figura 10.4. H H + $LUH 2 + Membrana polimérica o o ò2+H +2 + +H 3URGXFWR+2&DORU Fig. 10.4 Esquema de una pila PEM © Los autores, 2002; © Edicions UPC, 2002. 522 Máquinas térmicas motoras 1. Electrodos Las reacciones son lentas a la temperatura de trabajo. Por lo tanto, se requiere la presencia de platino en los electrodos como catalizador. Las características de los electrodos serán las siguientes: - Eléctricamente conductores Máxima superficie disponible de platino en las caras contiguas con la membrana polimérica Han de permitir el acceso de los gases a la superficie del catalizador Químicamente resistentes a los distintos compuestos con los que entran en contacto 2. Electrolito El electrolito está formado por una membrana polimérica. La estructura de esta membrana es un polímero orgánico, como el Nafion 117 (de DuPont) o ácido poliperfluorosulfónico. Este tipo de polímeros se caracteriza por tener una excepcional estabilidad química y térmica y frente a las bases fuertes. El electrolito (sustancia compuesta por iones positivos y negativos) se hidrata al absorber el agua y los protones (iones positivos) se pueden mover libremente. Por lo tanto, es adecuado que los gases de entrada tengan un cierto grado de humedad, aunque si éste es excesivo, la membrana dejaría de funcionar. Cuando cada átomo libera un electrón, la naturaleza de la membrana provoca que los electrones queden sujetos rígidamente dentro de la estructura sin poderse mover a través de la membrana, con lo que el único movimiento posible se realiza a través de un cable externo para poder completar el circuito. Mientras, el flujo de iones de hidrógeno pueden moverse libremente, con lo que se genera un movimiento del ánodo al cátodo a través de la membrana. Esta pila trabaja con agua líquida, de manera que la temperatura máxima de trabajo debe de estar por debajo de la temperatura de ebullición, que depende de la presión de trabajo. Además, el contenido de agua en la celda debe controlarse continuamente con el fin de mantener la conductividad iónica. Tanto un gran flujo de reactivos, una baja humidificación, una elevada temperatura y una baja presión provocan un déficit de agua, y al revés, un exceso. Las principales características que debe cumplir la membrana son las siguientes: - Electrolito conductor de iones positivos únicamente Aislante de electrones Separador de los gases oxidante y reductor Debe estar hidratada durante el funcionamiento El problema actual de este tipo de membrana se centra en su elevado coste de fabricación y en la limitación de la temperatura de trabajo por operar con agua líquida. Una mejora de estos dos aspectos implicaría un salto en el desarrollo de este tipo de pilas de combustible. © Los autores, 2002; © Edicions UPC, 2002. 10 Pilas de combustible 523 3. Catalizador La velocidad de las reacciones a la temperatura de trabajo de estas pilas es baja, de manera que se hace necesario el uso de un catalizador. En las PEM se utiliza el platino, ya que presenta la suficiente reactividad para enlazar las formas intermedias de hidrógeno y oxígeno. Sin embargo, el uso de platino resulta caro y es excesivamente sensible a las impurezas en los gases, de manera que estos dos aspectos son los que deben mejorarse. 4. Influencia de la temperatura La temperatura permite incrementar entre 1,1mV y 2,5mV el voltaje de salida por cada grado aumentado, especialmente debido a la disminución de la resistencia óhmica del electrolito. Sin embargo, se reduce el transporte de masa a elevada temperatura. Otro aspecto sobre el que afecta la temperatura conjuntamente con la presión es en el punto de ebullición del agua, que no puede alcanzarse, pues la pila no funcionaría. 5. Influencia de la presión El valor que se suele trabajar en las celdas actuales suele encontrarse alrededor de los 0,285MPa, aunque su rango de trabajo puede situarse entre los 0,1 y los 10 Mpa. El aumento de la presión aumenta el rendimiento de la celda, pero aún no se ha determinado si este aumento del rendimiento compensa la energía utilizada para comprimir los gases. 10.4.3 Pilas de ácido fosfórico (PAFC) Estas son las pilas de combustible utilizan ácido fosfórico como electrolito. Son las pilas de combustible que se encuentran actualmente más desarrolladas. Sus aplicaciones principales son estacionarias, dado que el electrolito es especialmente corrosivo y la temperatura de trabajo de estas pilas se encuentra alrededor de los 175-220°C. Estas pilas son inmunes al CO2, y pueden tolerar hasta un 2% de CO. La vida de estas pilas se encuentra alrededor de las 40000 horas de funcionamiento. Las reacciones que tienen lugar en el ánodo, el cátodo y la global de la pila son las siguientes: H 2 → 2H + + 2e- (1 0 .2 6 ) C á to d o : ½ O 2 + 2 H + + 2 e - → H 2 O (1 0 .2 7 ) Á nodo: P ila: H 2 + ½ O 2 → H 2O El esquema de la pila se muestra en la figura 10.5. © Los autores, 2002; © Edicions UPC, 2002. (1 0 .2 8 ) 524 Máquinas térmicas motoras H H *DVUHIRUPDGR +&2 $LUH 2 + Ácido fosfórico o o ò2+H +2 + +H 3URGXFWR+2&DORU Fig. 10.5 Esquema de una pila PAFC 1. Electrodos Los electrodos están formados por la capa catalítica, donde tiene lugar la reacción, y por el sustrato del que depende ésta. La capa catalítica dispone de un soporte estructural, carbono, de un catalizador, platino, y de un material hidrofóbico como el PTFE (teflón). Las especificaciones del sustrato son las siguientes: - Estable en las condiciones de trabajo y en presencia de ácido fosfórico (material utilizado habitualmente: carbono grafitizado) - Electrónica y térmicamente conductivo - Poroso, a través del cual los gases puedan difundirse efectivamente (porosidad habitual: 60-65%; tamaño de poros: 20-40mm) - Mecánicamente resistente en condiciones de alta presión. Las características que deben cumplir los electrodos son las siguientes: - Facilitar el acceso al platino, minimizando los recorridos de difusión - Facilitar el acceso de los gases reactivos a la zona adyacente al electrolito - Minimizar el tamaño de partícula del catalizador y maximizar el contacto mutuo entre las partículas de soporte de carbono © Los autores, 2002; © Edicions UPC, 2002. 10 Pilas de combustible 525 2. Electrolitos El electrolito seleccionado para esta pila de combustible es el ácido fosfórico, dado que permite trabajar a altas temperaturas, tiene tolerancia al CO2, baja presión de vapor, gran solubilidad en el oxígeno, buena conductividad iónica y ratios de corrosión bajos a alta temperatura. El ácido se encuentra en una matriz porosa de SiC. Está matriz mantiene el ácido en su interior por capilaridad. 3. Influencia de la temperatura El potencial de la pila se reduce al aumentar la temperatura según un factor de 027mV/°C, en condiciones estándar y obteniendo vapor de agua como producto. Sin embargo, el incremento de temperatura mejora las prestaciones de la celda debido a que se reducen las pérdidas por polarización. Si la temperatura es excesivamente baja, se puede producir envenenamiento del ánodo por CO, mientras que si es excesivamente alta, hay problemas de degradación del catalizador y evaporación y concentración del electrolito. 4. Influencia de la presión Un aumento de presión mejora las prestaciones de estas celdas. Estas mejoras pueden ser atribuidas a la baja difusión existente en el cátodo y al incremento en el potencial reversible de la celda. Además, el aumento de la presión también produce una disminución en la polarización por activación en el cátodo debido a que se incrementan las presiones parciales de los gases. Este incremento de la conductividad iónica conduce a una mayor densidad de corriente y una reducción de la polarización óhmica. 5. Influencia de los gases reactivos Una disminución en la concentración de los reactivos produce una disminución de las prestaciones del sistema debido a que se produce un aumento en la polarización por concentración. Las impurezas reducen el rendimiento de la celda. Incluso gases como el N2, que resultan inocuos, pueden formar compuestos como el NH3, HCN y NOx, que ya no lo son. Estas pilas presentan una importante tolerancia al CO2 y al CO. Sin embargo, continúa siendo muy importante utilizar combustibles de calidad adecuada. 6. Extracción del agua Dado que este tipo de pilas de combustible trabajan a temperatura relativamente altas, el agua sale por vaporización natural a través de los poros del electrodo y finalmente con el flujo de aire. 7. Refrigeración Estas pilas de combustible se refrigeran tanto por aire como mediante líquido. El aire resulta más económico y sencillo. Sin embargo, la refrigeración líquida tiene más potencia para eliminar calor. © Los autores, 2002; © Edicions UPC, 2002. 526 Máquinas térmicas motoras 8. Control de la pila de combustible Este sistema deberá controlar: - El flujo de reactantes en función de la demanda Diferencia de presiones entre gases reactantes (debe ser mínima) Solidificación del electrolito (solidifica a 42°C) Sobrevoltajes por variación de temperatura, presión o otros parámetros 10.4.4 Pilas de carbonato fundido (MCFC) Habitualmente el electrolito usado por este tipo de pilas corresponde a una combinación de carbonatos alcalinos retenidos en una matriz cerámica. Las reacciones que se producen en la pila son las siguientes: Ánodo: Cátodo: Pila: H2 + CO32- → H2O + CO2 + 2e½ O2 + CO2 + 2e-→ CO32H2 + ½ O2 + CO2→ H2O + CO2 (10.29) (10.30) (10.31) El gas producto del ánodo, rico en CO2, es suministrado al cátodo donde el CO2 se transforma en iones de carbonato durante la reducción del oxígeno. Los iones de carbonato se utilizan también como electrolito ácido. La elevada temperatura permite alcanzar eficiencias muy altas. Sin embargo, resulta un problema para la selección de materiales. La figura 10.6 muestra un esquema del funcionamiento de esta pila. H H *DVQDWXUDO PHWDQR+ $LUH 2 &2 &2 Carbonato alcalino o o ò2&2H &2 +&2 +2&2H 3URGXFWR+2&2&DORU Fig.10.6 Esquema de una pila MCFC © Los autores, 2002; © Edicions UPC, 2002. 10 Pilas de combustible 527 Los electrodos utilizados en estas pilas son de Ni poroso para el ánodo y de NiO poroso para el cátodo. Estas pilas pertenecen a la segunda generación, dado que su comercialización se prevé para después que las PAFC se hayan implantado en el mercado. Estas pilas trabajan a temperaturas relativamente elevadas (600-1000°C), lo que les permite utilizar combustibles no reformados. Estas pilas han alcanzado ya 4000 horas de vida, con lo cual su competitividad se encuentra cada vez más cerca. 10.4.5 Pilas de óxido sólido (SOFC) Estas pilas no tienen electrolito líquido debido a que presentan grandes problemas de corrosión de los componentes, así como de gestión y control del propio electrolito. El electrolito es, habitualmente, un óxido sólido no poroso como el Y2O3 estabilizado con ZrO2, con conductividad basada en iones de oxígeno. Las reacciones que tienen lugar en la pila son las siguientes: Ánodo: Cátodo: Pila: H2 + O2- → H2 O + 2e½ O2 + 2e-→ O2H2 + ½ O2 → H2O (10.32) (10.33) (10.34) Un esquema de la pila se muestra en la figura 10.7. H H *DVQDWXUDO PHWDQR+ $LUH 2 &2 2 Óxido de zirconio ½ O2 + 2e-→ O2- H2 + O2- → H2O + 2e3URGXFWR+2&2&DORU Fig.10.7 Esquema de una pila SOFC © Los autores, 2002; © Edicions UPC, 2002. 528 Máquinas térmicas motoras Habitualmente el ánodo es de Co-ZrO2 o Ni-ZrO2 cermet y el cátodo de LaMnO3 dopado con Sr. El carácter sólido de todos los elementos de la pila facilitan diferentes configuraciones de la pila. La temperatura de trabajo se encuentra entre 800-1000°C. Esta temperatura permite un proceso posterior de cogeneración. Sin embargo, temperaturas tan elevadas condicionan los materiales.La eficiencia térmica de estas pilas es inferior a otros tipos de celda debido a que la energía libre de Gibbs disminuye con el aumento de la temperatura. No obstante, el aumento de temperatura es beneficioso para la reducción de las pérdidas que se producen por polarización. Debido a las altas temperaturas de trabajo de estas pilas, pueden reformar internamente los gases. Sin embargo, la presencia de hidrógeno en el combustible ofrece un potencial más alto. Actualmente se han probado pilas de combustible que han alcanzado 70000 horas de funcionamiento. 10.4.6 Comparación de los tipos de pilas de combustible 3LODVGH FRPEXVWLEOH Electrolito de membrana polimérica (PEM) Alcalina (AFC) Ácido fosfórico (PAFC) (OHFWUROLWR Polímero orgánico sólido (ácido poliperfluorosulfónico) Hidróxido de potasio (solución acuosa inmersa en una matriz) Ácido fosfórico (líquido inmerso en una matriz) Carbonato fundido Carbonato de litio, sodio (MCFC) y/o potasio (líquido inmerso en una matriz) Óxido sólido Sólido óxido de Zirconia (SOFC) con Itria 3LODVGH FRPEXVWLEOH Electrolito de membrana polimérica (PEM) Alcalina (AFC) &RPEXVWLEOHV Hidrógeno puro y reformado 5HDFFLRQHV (ILFLHQFLD HOpFWULFD HOHFWURTXtPLFDV ÈQRGR 7HPSHUDWXUD q& &iWRGR\JOREDO H2 → 2H+ + 2e½ O2 + 2H+ + 2e- → H2O H2 + ½ O2 → H2O 60-100 45-60% H2 + 2(OH)- → 2H2O + 2e½ O2 + H2O + 2e-→ 2(OH)H2 + ½ O2 → H2O 70-100 45-60% H2 → 2H+ + 2e½ O2 + 2H+ + 2e- → H2O H2 + ½ O2 → H2O H2 + CO32- → H2O + CO2 + 2e½ O2 + CO2 + 2e-→ CO32H2 + ½ O2 + CO2→ H2O + CO2 175-220 40-50% 600-1000 45-65% H2 + O2- → H2O + 2e½ O2 + 2e-→ O2H2 + ½ O2 → H2O 800-1000 50-65% (70% trabajando con turbina) ,QWROHUDQFLDVIUHQWHHO FRPEXVWLEOHUHIRUPDGR CO ⇒ η ↓ Hidrógeno puro y reformado CO tolerado en baja concentración. CO2 no tolerado Ácido fosfórico Hidrógeno puro y CO, Sulfuro de hidrógeno (PAFC) reformado η ↓ (posible fallo de PC) Carbonato fundido Hidrógeno, gas metano y No hace falta reformar el (MCFC) natural, CO combustible Óxido sólido Hidrógeno, gas metano y No hace falta reformar el (SOFC) natural, CO combustible © Los autores, 2002; © Edicions UPC, 2002. $SOLFDFLRQHV Generación en vehículos, edificios y pequeñas aplicaciones Militar, espacio y transporte Transporte pesado y usos eléctricos Generación eléctrica Generación eléctrica y transporte 10 Pilas de combustible 529 10.5 Combustibles El combustible más utilizado hasta el momento en el desarrollo de pilas de combustible ha sido el hidrógeno. Este elemento presenta un PCI muy alto, de 120 MJ/kg. Esto significa que tiene una densidad de energía muy elevada. Además, al tratarse de un gas a temperatura ambiente puede ser comprimido de manera que elevando su presión ocupe poco espacio. Esto es especialmente útil en las aplicaciones para vehículos. Las emisiones que se producen al usar hidrógeno puro son nulas, de manera que este tipo de combustible es muy limpio. La obtención de hidrógeno es muy diversa, ya que puede ser el resultado de procesos químicos como la síntesi del amoníaco y del cloruro de hidrógeno, a partir de la electrólisis del agua, que puede ser mediante energías alternativas y renovables, y el reformado de hidrocarburos. Los hidrocarburos pueden ser biocombustibles, como el metanol, el metano, el biodiésel o el etanol, o bien, de origen fósil, proveniente del petróleo. Sin embargo, el factor seguridad provoca recelos respecto al uso de este combustible, ya que se trata de un producto fácilmente inflamable en contacto con el oxígeno de la atmósfera. Para eliminar este riesgo, existen dos vías. La primera es la de utilizar productos que contengan hidrógeno, como metanol o gasolina, con el objetivo de recuperarlo en el momento de su uso, mediante un reformador. El metanol se puede conseguir tanto del metano o a través de la descomposición de materia orgánica, con lo que se usaría energía alternativa. La segunda vía es la de utilizar combustibles alternativos directamente. Esta segunda vía es la que utilizan las pilas de alta temperatura (MCFC, SOFC) y también se encuentra en desarrollo un tipo de pila de combustible de baja temperatura (65º) alimentada directamente con metanol o gasolina. Otra alternativa es el uso de hidruros metálicos, que absorben hidrógeno que se coloca en el interior de la estructura cristalina. El proceso de extracción se controla por presión. Actualmente se puede almacenar 1 kg de hidrógeno por cada 20 kg de metal. Otro tipo de hidruros liberan hidrógeno en presencia de agua pero son, a temperatura ambiente, inflamables. Sin embargo, el boro hidruro de sodio (NaBH4) es sólido a temperatura ambiente, se diluye en agua y libera hidrógeno sólo cuando es sumergido en un cierto catalizador, permitiendo un proceso de extracción de hidrógeno controlado. Para obtener hidrógeno útil para trabajar en las pilas de combustible a partir de hidrocarburos es necesario un proceso de transformación. Este proceso es posible realizarlo en el propio automóvil en el caso de aplicaciones de automoción. Existen diferentes tipos de procesos. Los procesos que generan CO y CO2 requieren un proceso posterior para reducir la cantidad de CO. Existe un proceso químico, consistente en una conversión de CO en vapor y un posterior reacción PROX o una metanización. Otro proceso es el de membrana de absorción. Los procesos de reformado que se montan en vehículo presentan una respuesta de transitorio de 10 segundos. Esto significa que es necesario un depósito de hidrógeno entre el reformador y la pila de combustible que permita responder adecuadamente a los transitorios del vehículo. © Los autores, 2002; © Edicions UPC, 2002. 530 Máquinas térmicas motoras En cuanto al oxígeno que consumen las pilas de combustible, algunas de ellas no pueden utilizar directamente aire de la atmósfera, ya que debe reducirse la concentración de CO2. Para ello se usa, por ejemplo, hidróxido cálcico. Tabla 10.2 Procesos de reformado de combustible 5HIRUPDGRGH FRPEXVWLEOHV 9HQWDMDV ,QFRQYHQLHQWHV Alta concentración de H2. Reacción endotérmica. Producción de CO y CO2. Arranque lento en frío Compacidad Arranque rápido. Transitorios cortos. Reacción exotérmica Concentración insuficiente de H2 para la PC. Producción de CO y CO2. Alta concentración de H2. Arranque rápido y transitorios aceptables. Reacción energéticamente autosuficiente. El gas rico en H2 no contiene CO ni CO2. Sistema compacto, simple y barato. Consumo de energía muy bajo. No produce CO2 si no se quema carbón sólido. Producción de CO y CO2. 5HIRUPDGRSRUYDSRUGH Alta eficiencia DJXD 2[LGDFLyQSDUFLDO 5HIRUPDGRDXWRWpUPLFR 'HVFRPSRVLFLyQWpUPLFDL GHVFRPSRVLFLyQFDWDOtWLFD Temperaturas de trabajo elevadas (700-900ºC). Arranque lento. En fase inicial de desarrollo. Tabla 10.3 Procesos de reducción de CO en gas rico en H . 2 5HGXFFLyQGH&2HQJDV ULFRHQ+ 9HQWDMDV Coste elevado pero accesible Sistema muy complejo. Poco compacto. Reducción del CO en dos fases. Sistema simple y compacto. Pureza de H2 muy alta. Coste muy elevado. 3URFHVRTXtPLFR 0HPEUDQDDEVRUFLyQ ,QFRQYHQLHQWHV © Los autores, 2002; © Edicions UPC, 2002. © Los autores, 2002; © Edicions UPC, 2002. © Los autores, 2002; © Edicions UPC, 2002. © Los autores, 2002; © Edicions UPC, 2002. © Los autores, 2002; © Edicions UPC, 2002.